
クレーン、その免震方法、及びクレーンの横行体の制御方法
【課題】地震の発生時に、重心を安定する位置に確保し、走行装置の脱輪、及びクレーンの倒壊を防止することができるクレーン、その免震方法、及びクレーンのトロリーの制御方法を提供する。
【解決手段】荷役作業中の地震の発生時に、トロリー12を重心安定停止位置P1へ横行させて、免震クレーン1の重心g1を海側脚2と陸側脚3の略中間の位置に確保し、また、休業時にトロリー12の係留位置P3を重心安定停止位置P3にして、予めクレーン1の重心g3を海側脚2と陸側脚3の略中間の位置に確保しておくように構成する。
【解決手段】荷役作業中の地震の発生時に、トロリー12を重心安定停止位置P1へ横行させて、免震クレーン1の重心g1を海側脚2と陸側脚3の略中間の位置に確保し、また、休業時にトロリー12の係留位置P3を重心安定停止位置P3にして、予めクレーン1の重心g3を海側脚2と陸側脚3の略中間の位置に確保しておくように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地震が発生したときに、クレーンの重心を安定的な位置に確保して、クレーンの脚の浮き上がりを防ぐクレーン、その免震方法、及びクレーンの横行体の制御方法に関する。
【背景技術】
【0002】
一般的に、港湾で荷役作業を行う岸壁クレーンの姿勢には、作業時のトロリーアウトリーチ位置、作業時のトロリーバックリーチ位置、及び休業時という3つのパターンがある。作業時のトロリーアウトリーチ位置は、トロリーがブーム上で荷役作業を行っており、海側脚寄りにクレーンの重心が寄っている。一方、トロリーバックリーチ位置での休業時は、トロリーがガータ上に位置しており、陸側脚よりにクレーンの重心が寄っている。
【0003】
特に、岸壁クレーンは、作業時よりも休業時の姿勢で待機している時間の方が長い。つまり、岸壁クレーンの重心は海側脚又は陸側脚のどちらか一方に寄っていることが多いことになる。その状態で地震が発生した場合には、重心がどちらかの脚に寄っているため、他方の脚が浮いてしまうという問題が起きる。
【0004】
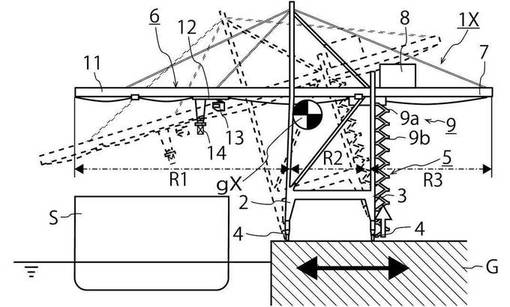
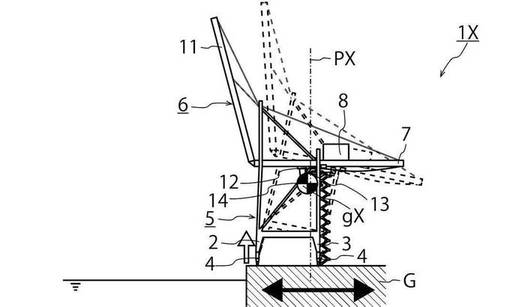
ここで、従来のクレーンの地震時の姿勢について、図11及び図12を参照しながら説明する。図11は作業時のトロリーアウトリーチ位置を示す。岸壁Gに接岸した船舶Sからコンテナを荷役する岸壁クレーン1Xは海側脚2、陸側脚3、及び走行装置4からなる脚構造物5に支えられる上部構造物6を備え、その上部構造物6は、ガータ7、機械室8、及びブーム11とトロリー12を備える。また、トロリー12には運転室13と吊り具14とを備える。加えて、陸側脚3の位置には乗り込み口9aと階段9bからなる搭乗部9を備える。
【0005】
荷役作業中で、トロリー12がアウトリーチR1に位置するときに、岸壁クレーン1Xの重心gXは、海側脚2寄りに位置している。この姿勢の時に地震が発生すると、重心gXの影響により、陸側脚3が浮き上がってしまう。
【0006】
一方、図示しないが、荷役作業中でトロリー12がバックリーチR3に位置するときに、岸壁クレーン1Xの重心は、陸側脚3寄りに位置することになる。この姿勢の時に地震が発生すると、陸側脚3よりの重心の影響により、海側脚2が浮き上がってしまう。
【0007】
図12は岸壁クレーン1Xの休業時を示す。休業時に岸壁クレーン1Xは、ブーム11を上げた姿勢となり、また、トロリー12の係留位置PXは、陸側脚3の位置(以下、陸側脚位置L2とする)に近い位置となる。よって、ブーム11が上がっていること、機械室8がバックリーチR3に位置すること、及びトロリー12の係留位置PXが陸側脚位置L2の近くに位置することから、この時の岸壁クレーン1Xの重心gXは、陸側脚3寄りに位置している。この姿勢の時に地震が発生すると、重心gXの影響により、海側脚2が浮き上がってしまう。
【0008】
上記の問題を解決するために、海陸方向の揺れに対して、免震ゴムを走行装置や脚構造物に備えた装置がある。(例えば、特許文献1参照)。この装置は海陸方向の揺れで、クレーンを揺動させることによって、海側脚又は陸側脚の浮き上がりを防止している。
【0009】
しかしながら、上記で説明したクレーンの重心の位置による問題は解決されておらず、走行装置がレールから脱輪してしまう問題や、クレーン自身の倒壊の問題が起きる可能性
がある。また、一般的に陸側脚位置に運転室への搭乗部があることから、特にクレーンの重心が陸側脚に寄ってしまう休業時は、クレーンの姿勢の中でも一番多い時間であり、上記の問題が発生しやすい状況となっている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−192197号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を鑑みてなされたものであり、その目的は、地震が発生したときにクレーンの重心を安定的な位置に確保して、クレーンの脚が浮き上がることを防止することができるクレーン、その免震方法、及びクレーンの横行体の制御方法を提供することである。
【課題を解決するための手段】
【0012】
上記の目的を解決するための本発明のクレーンは、上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動可能なブームの少なくとも1つを備えたクレーンにおいて、地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させているように制御して、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保する制御装置を備えて構成される。
【0013】
この構成によれば、クレーンのトロリーなどの横行体、及びブームを所定の位置へ動かすことで、クレーンの重心を移動して、地震が発生したときにクレーンの重心をクレーンのどの脚にも重心が片寄ることがない位置であるクレーンの脚間の略中間の位置に確保し、クレーンの重心を安定させることができる。これにより、地震時に重心がクレーンのどちらかの脚に寄っている場合に発生する他方の脚が浮いてしまうという問題を解決し、クレーンの走行装置の脱輪やクレーンの倒壊を防ぐことができる。
【0014】
また、上記のクレーンがアウトリーチ側脚とバックリーチ側脚とを備え、前記クレーンの荷役作業中に地震の発生を検知すると、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記横行体を横行させる手段を備える。
【0015】
この構成によれば、クレーンが荷役作業中に、地震の発生を地震の発生前に地震速報などで検知して、地震発生前に、30t〜60tの重さを持つトロリーを動かして、どちらか一方の脚寄りになっているクレーンの重心をアウトリーチ側脚とバックリーチ側脚の略中間に確保することができる。これにより、クレーンの重心が安定的な位置に確保され、クレーンの脚の浮き上がりを防ぐことができる。この地震の発生を検知する手段(地震検知手段)は緊急地震速報受信器が地震速報を受信することで、地震発生前に地震の検知を行う手段である。
【0016】
例えば、岸壁クレーンのトロリーがアウトリーチに位置して、荷役を行っている場合は、クレーンの重心は海側脚(アウトリーチ側脚)に寄っている。そこで、地震の発生を検知すると荷役作業を止めて、トロリーを陸側(バックリーチ側)へ横行させることで、クレーンの重心を移動し、クレーンの重心を安定する位置に確保することができる。また、トロリーがバックリーチで作業している場合も、同様にトロリーを海側(アウトリーチ側)へ横行させ、安定する位置へクレーンの重心を移動することができる。
【0017】
また、荷役作業中は危険なので、予報を検知して運転手をはじめとした現場関係者の安全を確認した後に、運転室、又は搭乗部に設けた回避ボタンを押下すると自動でトロリーが適切な位置に横行するように構成してもよい。
【0018】
加えて、上記のクレーンがアウトリーチ側脚とバックリーチ側脚とを備え、前記アウトリーチ側脚の近傍に、前記クレーンの休業時の前記横行体の係留位置を備える。
【0019】
この構成によれば、クレーンの休業時に、海側脚の近傍にトロリーの係留位置を備えることで、休業時のクレーンの重心を安定した位置に確保することができる。そのため、作業時の体勢よりも長く待機している休業時の体勢でも、地震の発生時の重心が安定する。従来では陸側脚の近傍にトロリーの係留位置を配置しており、その場合に発生していた海側脚の浮き上がりを防止することができる。
【0020】
さらに、上記のクレーンにおいて、前記バックリーチ側脚に前記横行体への搭乗部を備え、前記搭乗部で運転員が前記横行体の運転室から乗り降りするときに、前記制御装置が前記搭乗部に前記横行体を横行させる手段を備える。
【0021】
この構成によれば、上記に記載の作用効果を得ることができると共に、陸側脚の近傍に搭乗部を設け、運転員が乗り降りするときにトロリーをその搭乗部に移動させることで、船舶との接触の危険を避けることができ、安全に運転員がトロリーに乗り降りすることができる。
【0022】
一方、上記のクレーンにおいて、前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、地震が発生したときに、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記ブームを移動させる前記所定の位置を、休業中の前記ブームの位置と荷役作業中の前記ブームの位置の間に設ける。
【0023】
この構成によれば、ブームを所定の位置に移動させることで、どちらか一方の脚寄りになっているクレーンの重心をアウトリーチ側脚とバックリーチ側脚の略中間に確保することができる。例えば、クレーンの休業中に上がっているブームを、地震発生時に下げることで、陸側脚(バックリーチ側脚)に寄っていた重心を安定する位置に移動することができる。
【0024】
このブームを移動させる所定の位置は、休業中のブームの位置と荷役作業中のブームの位置の間であり、好ましくは荷役作業中のブームの位置から上方45°よりも大きい角度を示す位置である。
【0025】
上記の問題を解決するためのクレーンの免震方法は、上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動するブームの少なくとも1つを備えたクレーンの免震方法であって、地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させて、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保することを特徴とする方法である。
【0026】
この方法によれば、地震が発生したときにクレーンの重心を安定的な位置に確保することで、クレーンの重心が寄っている場合に発生するクレーンのどちらかの脚の浮き上がりを防止することができる。
【0027】
上記の問題を解決するためのクレーンのトロリーの制御方法は、クレーンの横行体の制御方法であって、休業時の前記クレーンの重心を前記クレーンの脚間の略中間の位置に確
保するように、前記横行体を所定の位置に係留する。
【0028】
この方法によれば、クレーンの姿勢の中で一番多い休業中のクレーンの重心を、常に安定する位置に確保することができるため、休業中に地震が発生してもクレーンの脚の浮き上がりを防止することができる。
【発明の効果】
【0029】
本発明によれば、地震が発生したときにクレーンの重心を安定的な位置に確保して、クレーンの脚が浮き上がることを防止することができる。そのため、クレーンの走行装置の脱輪、及びクレーンの倒壊を防ぐことができる。
【図面の簡単な説明】
【0030】
【図1】本発明に係る第1の実施の形態の免震クレーンの荷役作業中を示した正面図である。
【図2】本発明に係る第1の実施の形態の免震クレーンの制御装置を示した概略図である。
【図3】本発明に係る第1の実施の形態の免震クレーンの荷役作業中の免震方法を示したフローチャートである。
【図4】本発明に係る第1の実施の形態の免震クレーンの休業中を示した正面図である。
【図5】本発明に係る第1の実施の形態の免震クレーンの休業中の免震方法を示したフローチャートである。
【図6】本発明に係る第2の実施の形態の免震クレーンの休業中を示した正面図である。
【図7】本発明に係る第3の実施の形態の免震クレーンの休業中を示した正面図である。
【図8】本発明に係る第3の実施の形態の免震クレーンのトロリーの制御方法を示したフローチャートである。
【図9】本発明に係る第4の実施の形態の免震クレーンの休業中を示した正面図である。
【図10】本発明に係る第4の実施の形態の免震クレーンの休業中の免震方法を示したフローチャートである。
【図11】従来のクレーンの荷役作業中を示した正面図である。
【図12】従来のクレーンの休業中を示した正面図である。
【発明を実施するための形態】
【0031】
以下、本発明に係る実施の形態のクレーンとその免震方法について、図面を参照しながら説明する。なお、図11及び12と同様の構成については、同一符号を用い、その説明を省略する。
【0032】
本発明の実施の形態は、クレーンとして、コンテナターミナルなどの港湾で使用される岸壁クレーン、移動型のジブクレーン、アンローダークレーン、及びロープロファイルクレーンなど、上部構造を横行する横行体、又は移動するブームを有し、その横行体とブームの少なくとも1つを動かすことによって重心を移動可能なクレーンに適用することができる。好ましくは、上記のクレーンに、地震の振動を吸収するように積層ゴムなどの免震装置を設けた装置に適用すると効果的である。よって、実施の形態の説明では免震クレーンとして説明する。
【0033】
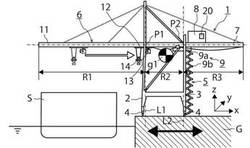
最初に本発明に係る第1の実施の形態のクレーンについて、図1を参照しながら説明する。ここで、免震クレーン1の横行方向をx方向、免震クレーン1の走行方向をy方向、
上下方向をz方向とする。また、この免震クレーン1の海側脚2のx軸上の位置を海側脚位置(アウトリーチ側脚位置)L1、陸側脚3のx軸上の位置を陸側脚位置(バックリーチ側脚位置)L2とする。
【0034】
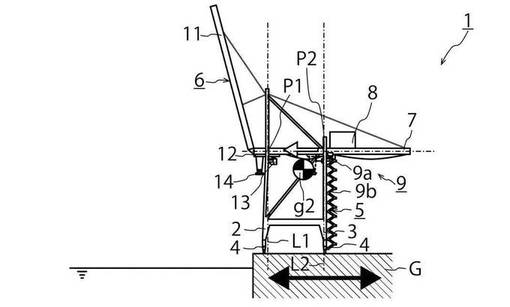
この免震クレーン1のブーム11とガータ7からなる桁部の海側脚位置L2の近傍に、地震発生時にトロリー(横行体)12が停止する位置である重心安定停止位置P1を設ける。また、この免震クレーン1は機械室8に制御装置20を備える。
【0035】
この重心安定停止位置P1は、免震クレーン1の形状、トロリー12と運転室13と吊り具14を含めた重量、機械室8の重量、アウトリーチR1の長さ、スパンR2の長さ、及びバックリーチR3の長さによって定められる位置である。この重心安定停止位置P1は、好ましくはトロリー12がその位置で停止したときに、免震クレーン1の重心g1が海側脚(アウトリーチ側脚)2と陸側脚(バックリーチ側脚)3のどちらにも片寄らない位置であり、より好ましくは海側脚2と陸側脚3との略中間の位置である。
【0036】
この実施の形態の免震クレーン1は、岸壁クレーンであり、この重心安定停止位置P1は海側脚位置L1の近傍とする。また、重心安定停止位置P1は、免震クレーン1の重心g1が海側脚2と陸側脚3との略中間の確保することができれば、上記の位置に限定しない。
【0037】
免震クレーン1は、トロリー12を重心安定停止位置P1に配置することで、免震クレーン1の重心g1を海側脚2と陸側脚3との略中間の位置である安定的な位置に確保することができる。よって、地震が発生したときに免震クレーン1の重心g1が海側脚2又は陸側脚3のどちらか一方に片寄っていないため、x方向の地震の振幅によって、海側脚2又は陸側脚3が浮き上がることを防止することができる。これにより、走行装置4の脱輪を防止すること、及び免震クレーン1の倒壊を防ぐことができる。
【0038】
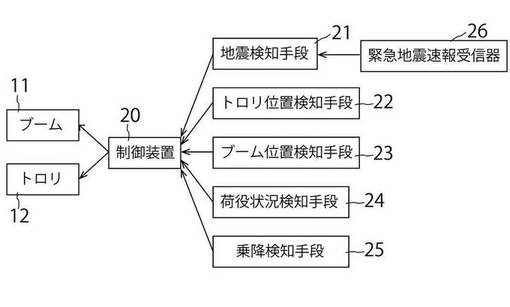
制御装置20は、免震クレーン1の各部の制御を行う装置である。この制御装置20は、図2に示すように、ブーム11とトロリー12の制御を行う。また、地震検知手段21、トロリー位置検知手段22、ブーム位置検知手段23、荷役状況検知手段24、及び乗降検知手段25の情報を受信する。
【0039】
地震検知手段21は、緊急地震速報受信器26が受信した地震速報により、地震の発生を予測する手段であり、地震の発生を検知するとその情報を制御装置20へと送る。トロリー位置検知手段22は、トロリー12の位置を常に検知している。ブーム位置検知手段23は、ブーム11が上がっているか下がっているかを検知している。荷役状況検知手段24は吊り具14でコンテナ(吊荷)を吊っているか否かを検知している。乗降検知手段25は、運転手の運転室13への乗り降りを検知している。各検知手段21〜25は、必要な情報を検知することができればよく、周知のセンサ、又は周知の方法を用いることができる。
【0040】
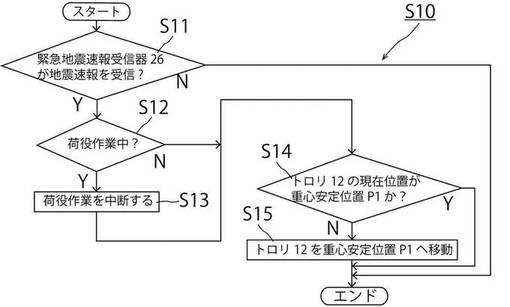
次に本発明に係る第1の実施の形態の免震クレーン1の荷役作業中の動作について図1及び図3を参照しながら説明する。図1に示すように、免震クレーン1が荷役作業中で、トロリー12がアウトリーチR1に位置するときに、緊急地震速報が発せられると、制御装置20は、図3に示す免震方法S10を行う。
【0041】
最初に、緊急地震速報受信器26が、地震速報を受信したか否かを判断するステップS11を行う。このステップS11で地震速報を受信すると、その情報を制御装置20へと送りステップS12へと進む。次に、制御装置20は、荷役状況検知手段24の情報から、荷役作業中か否かを判断するステップS12を行う。ステップS12で荷役作業中と判
断された場合は、制御装置20は、運転手に荷役作業を中止するよう警報を送り、荷役作業を中断するステップS13を行わせる。
【0042】
このステップS13は、例えば船舶Sから吊荷を巻き上げた直後の場合は、再度船舶S上に吊荷を下ろし、また、トロリー12の近傍まで巻き上げている場合は、吊荷を吊ったままにするなど、荷役状況によって変わる。
【0043】
次に、制御装置20は、トロリー位置検知手段22の情報から、トロリー12の現在位置が重心安定停止位置P1か否かを判断するステップS14を行う。トロリー12の現在位置が重心安定停止位置P1で無い場合は、トロリー12を重心安定停止位置P1まで横行させるステップS15を行い、トロリー12が重心安定停止位置P1で停止するとこの免震方法S10は完了する。
【0044】
また、緊急地震速報受信器26が地震速報を受信すると、制御装置20が警報を鳴動させ、安全ランプの点灯を警告用に切り換え、トロリー12が重心安定停止位置P1近傍の安定位置圏内に入ったら警報を鳴動させたまま、安全ランプの点灯を通常に戻すステップを追加してもよい。
【0045】
加えて、上記の免震方法S10は制御装置20によって自動的に行われる方法を説明したが、荷役作業中は危険なので、ステップS11で地震の発生を検知すると、運転手をはじめとした現場関係者の安全を確認した後に、運転室13、又は搭乗部9aに設けた回避ボタン(図示せず)を押下すると自動でトロリー12が重心安定停止位置P1に横行するようなステップを追加してもよい。
【0046】
この免震方法S10によって、アウトリーチR1で作業していたトロリー12を地震が発生する前に予め重心安定停止位置P1に停止させることができ、免震クレーン1の重心g1を海側脚2と陸側脚3との略中間の安定的な位置に確保することができる。これにより、地震が発生して、x方向の地震の振幅を受けても、地震の発生時には免震クレーン1の重心g1が海側脚2又は陸側脚3のどちらか一方に片寄っていないため、海側脚2又は陸側脚3の浮き上がりを防止することができる。
【0047】
同様にスパンR2、及びバックリーチR3にトロリー12が位置する場合も上記の方法を行い、陸側脚3によっていた重心g1を、海側脚2と陸側脚3との間の安定的な位置に確保することができる。
【0048】
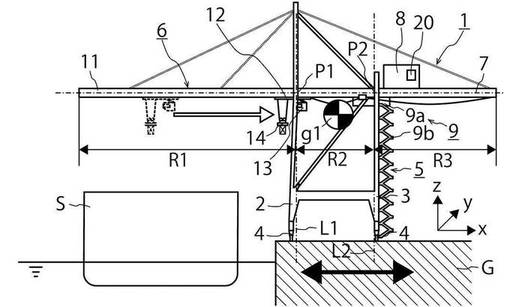
次に、本発明に係る第1の実施の形態の免震クレーン1の休業中の動作について、図4を参照しながら説明する。免震クレーン1は、休業中は船舶Sとの接触の危険性を避けるためブーム11を上げた姿勢を保持している。また、同様の理由に加えて、運転手又は他の作業員の安全性の観点から船舶との接触の危険性がない陸側脚位置L2の近傍に搭乗部9を設け、また、その搭乗部9に運転室13を位置するように係留されている。このトロリー12が係留されている位置を係留位置P2とする。
【0049】
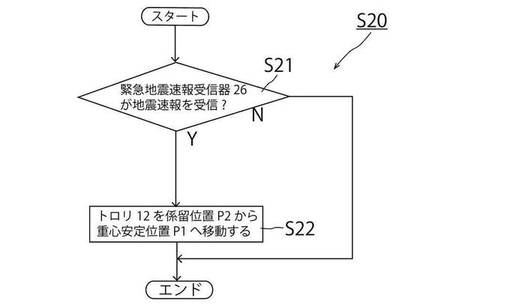
免震クレーン1が休業中に地震が発生すると、図5に示す、免震方法S20を行う。ステップS21で緊急地震速報受信器26が地震速報を受信すると、制御装置20は、トロリー12を係留位置P2から重心安定停止位置P1まで横行させるステップS22を行う。この免震方法S20によって、陸側脚4側に重心g2が寄っている休業中の免震クレーン1の重心g2を海側脚2と陸側脚3との略中間の安定的な位置に確保することができる。
【0050】
上記の方法によれば、休業中で、陸側脚4の近傍の係留位置P2に停止しているトロリ
ー12を、地震の発生前に、重心安定停止位置P1へ横行させることができるので、地震の発生時に免震クレーン1の重心g2を安定的な位置に確保することができる。これにより、荷役作業中よりも多い時間である休業中に、地震が発生しても、免震クレーン1の海側脚3の浮き上がりを防止することができる。
【0051】
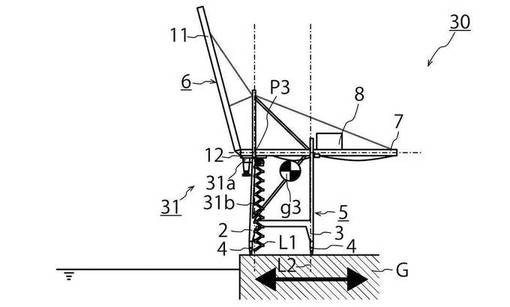
次に、本発明に係る第2の実施の形態のクレーンについて、図6を参照しながら説明する。免震クレーン30は、搭乗部31を海側脚位置L1の近傍に設け、また、係留位置P3も海側脚位置L1の近傍に設ける。この係留位置P3は、重心安定停止位置P3でもある。その他の構成は図1及び図4に示す免震クレーン1と同様である。
【0052】
この構成によれば、搭乗部31を海側脚2側に設けることにより、トロリー12の係留位置P3を重心安定停止位置P3にすることができる。そのため、従来の図11に示すクレーンが、搭乗部を陸側脚位置L2に設けていたため発生していた、休業時に重心g3が海側脚3に寄ってしまう問題を解決することができる。
【0053】
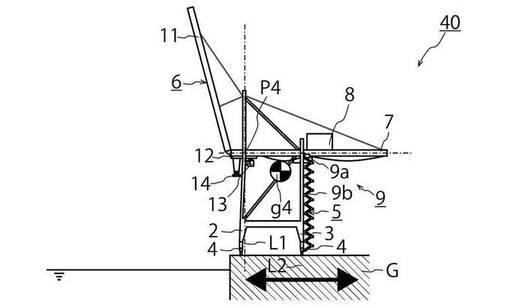
次に、本発明に係る第3の実施の形態のクレーンについて、図7を参照しながら説明する。免震クレーン40は、休業中のトロリー12の係留位置P4を海側脚位置L1の近傍に設ける。この係留位置P4は、重心安定停止位置P3でもある。その他の構成は図1及び図4に示す免震クレーン1と同様である。
【0054】
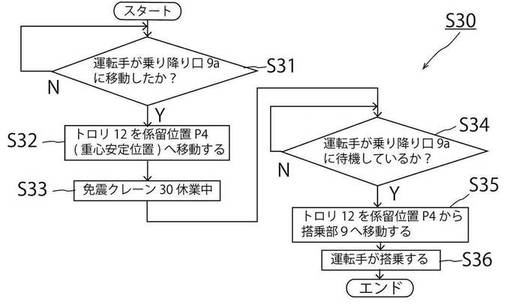
次に、本発明に係る第3の実施の形態の免震クレーン40の動作について、図8を参照しながら説明する。荷役作業が完了し、運転手はトロリー12を搭乗部9へ移動し、搭乗部9でトロリー12を停止して、運転室14から降車する。そこから免震クレーン40のトロリーの制御方法S30を開始する。
【0055】
先ず、制御装置20は、乗降検知手段25の情報により、運転手が乗り降り口9aに移動したか否かを判断するステップS31を行う。運転手が運転室14から降車したことを確認すると、次に、トロリー12を重心安定停止位置P4でもある係留位置P4へ移動するステップS32を行う。トロリー12を係留位置P4に係留して、免震クレーン40は休業する(ステップS33)。
【0056】
免震クレーン40の運転を再開するときに、制御装置20は、乗降検知手段25の情報により、運転手が乗り降り口9aに待機しているか否かを判断するステップS34を行う。運転手が乗り降り口9aに待機していることを確認すると、次に、制御装置20は、トロリー12を係留位置P4から搭乗部9へ移動するステップS35を行う。運転手が運転室14に搭乗する(ステップS36)と完了する。
【0057】
上記のステップS31とS34の代わりに、乗り降り口9aにトロリー12を係留位置P4へ移動させる、及び係留位置P4から搭乗部9へ移動させるボタンを設けて、運転手がそのボタンを押したときに上記のようにトロリー12を移動させる方法を用いてもよい。
【0058】
上記の方法によれば、陸側脚3側に運転室14への搭乗部9を備える免震クレーン40の休業中の重心g4を、地震の発生前に安定的な位置に確保することができる。免震クレーン40は作業中よりも、休業時の姿勢で待機している時間の方が長く、休業時に地震が発生する確率が高い。その休業時の姿勢を、予め重心g4が安定している姿勢にすることで、地震が発生しても、海側脚2又は陸側脚3の浮き上りを防ぐことができる。
【0059】
また、搭乗部9を従来のクレーンと同様に、陸側脚位置L2に設けることができるので、免震性の向上と共に安全性を確保することができる。加えて、係留位置P4を変更する
だけでよく、コストをかけずに休業時に発生する地震への対策を行うことができる。
【0060】
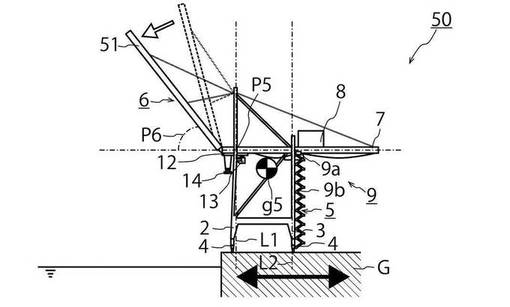
次に、本発明に係る第4の実施の形態のクレーンについて、図9を参照しながら説明する。免震クレーン50は、免震クレーン50の休業時に可動させて、免震クレーン50の重心g5を海側脚2と陸側脚3の略中間の安定的な位置に確保することができるブーム51を備える。その他の構成は図6に示す免震クレーン40と同様である。
【0061】
この免震クレーン50に、トロリー12の重心安定停止位置P5と、ブーム51の重心安定角度P6とを設ける。この重心安定角度P6は、ブーム51のxy平面に対する角度で、免震クレーン50の形状、ブーム51の全長などの条件により設定される角度であり、好ましくは休業中のブーム51の位置と荷役作業中のブーム51の位置との間の角度であり、より好ましくは上記のトロリー12の横行と合せて、免震クレーン50の重心g5を海側脚2と陸側脚3の略中間の安定的な位置に確保することができる角度である。
【0062】
この免震クレーン50の動作について、図9を参照しながら説明する。荷役作業が完了して、運転手が運転室14から降車して、トロリー12を重心安定停止位置P5でもある係留位置P5に停止するまでは、前述の制御方法S30と同様に行う。
【0063】
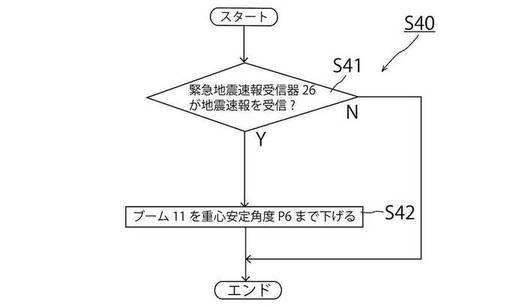
休業中に、この免震クレーン40は免震方法S40を行う。ステップS41は、前述の免震方法S10で説明した地震の検知方法と同様である。ステップS41で、地震が発生すると予測されると、ブーム51を重心安定角度P6まで下げるステップS42を行い、完了する。
【0064】
この方法によれば、休業中に上方に上がっているブーム51を重心安定角度P6まで下げることで、免震クレーン50の重心g5を安定的な位置に確保することができる。これにより、休業中の地震による海側脚2の浮き上がりを防止することができる。
【0065】
上記の免震方法S40は、ブーム51上にトロリー12が横行していなければ、荷役作業中に行うこともできる。その場合は、ブーム51を重心安定角度P6まで上げることで、免震クレーン40の重心g5を移動し、免震クレーン40の重心g5を安定する位置に確保することができる。
【0066】
この実施の形態では起伏するブーム51について説明したが、例えば、ロープロファイルクレーンなどで、海陸方向に摺動するブームを有している場合は、所定の位置までブームを移動することで、上記と同様の作用効果を得ることができる。
【0067】
上記の免震方法又は制御方法S10、S20、S30、及びS40はそれぞれ組み合わせて行うこともできる。
【産業上の利用可能性】
【0068】
本発明のクレーンは、トロリー、及びブームを動かすことで、クレーンの重心を移動して、クレーンの重心を安定する位置に確保することができ、重心が一方の脚に寄って、他方の脚が浮いてしまうことを防止することができるので、特に、免震装置を備えた港湾荷役機器に利用することができる。
【符号の説明】
【0069】
1、30、40、50 免震クレーン
2 海側脚(アウトリーチ側脚)
3 陸側脚(バックリーチ側脚)
4 走行装置
5 下部構造物
6 上部構造物
7 ガータ
8 機械室
9 搭乗部
11 ブーム
12 トロリー(横行体)
20 制御装置
P1 重心安定停止位置
P2 係留位置
P3、P4、P5 係留位置(重心安定停止位置)
P6 重心安定角度
g1〜5 重心
L1 海側脚位置(アウトリーチ側脚位置)
L2 陸側脚位置(バックリーチ側脚位置)
【技術分野】
【0001】
本発明は、地震が発生したときに、クレーンの重心を安定的な位置に確保して、クレーンの脚の浮き上がりを防ぐクレーン、その免震方法、及びクレーンの横行体の制御方法に関する。
【背景技術】
【0002】
一般的に、港湾で荷役作業を行う岸壁クレーンの姿勢には、作業時のトロリーアウトリーチ位置、作業時のトロリーバックリーチ位置、及び休業時という3つのパターンがある。作業時のトロリーアウトリーチ位置は、トロリーがブーム上で荷役作業を行っており、海側脚寄りにクレーンの重心が寄っている。一方、トロリーバックリーチ位置での休業時は、トロリーがガータ上に位置しており、陸側脚よりにクレーンの重心が寄っている。
【0003】
特に、岸壁クレーンは、作業時よりも休業時の姿勢で待機している時間の方が長い。つまり、岸壁クレーンの重心は海側脚又は陸側脚のどちらか一方に寄っていることが多いことになる。その状態で地震が発生した場合には、重心がどちらかの脚に寄っているため、他方の脚が浮いてしまうという問題が起きる。
【0004】
ここで、従来のクレーンの地震時の姿勢について、図11及び図12を参照しながら説明する。図11は作業時のトロリーアウトリーチ位置を示す。岸壁Gに接岸した船舶Sからコンテナを荷役する岸壁クレーン1Xは海側脚2、陸側脚3、及び走行装置4からなる脚構造物5に支えられる上部構造物6を備え、その上部構造物6は、ガータ7、機械室8、及びブーム11とトロリー12を備える。また、トロリー12には運転室13と吊り具14とを備える。加えて、陸側脚3の位置には乗り込み口9aと階段9bからなる搭乗部9を備える。
【0005】
荷役作業中で、トロリー12がアウトリーチR1に位置するときに、岸壁クレーン1Xの重心gXは、海側脚2寄りに位置している。この姿勢の時に地震が発生すると、重心gXの影響により、陸側脚3が浮き上がってしまう。
【0006】
一方、図示しないが、荷役作業中でトロリー12がバックリーチR3に位置するときに、岸壁クレーン1Xの重心は、陸側脚3寄りに位置することになる。この姿勢の時に地震が発生すると、陸側脚3よりの重心の影響により、海側脚2が浮き上がってしまう。
【0007】
図12は岸壁クレーン1Xの休業時を示す。休業時に岸壁クレーン1Xは、ブーム11を上げた姿勢となり、また、トロリー12の係留位置PXは、陸側脚3の位置(以下、陸側脚位置L2とする)に近い位置となる。よって、ブーム11が上がっていること、機械室8がバックリーチR3に位置すること、及びトロリー12の係留位置PXが陸側脚位置L2の近くに位置することから、この時の岸壁クレーン1Xの重心gXは、陸側脚3寄りに位置している。この姿勢の時に地震が発生すると、重心gXの影響により、海側脚2が浮き上がってしまう。
【0008】
上記の問題を解決するために、海陸方向の揺れに対して、免震ゴムを走行装置や脚構造物に備えた装置がある。(例えば、特許文献1参照)。この装置は海陸方向の揺れで、クレーンを揺動させることによって、海側脚又は陸側脚の浮き上がりを防止している。
【0009】
しかしながら、上記で説明したクレーンの重心の位置による問題は解決されておらず、走行装置がレールから脱輪してしまう問題や、クレーン自身の倒壊の問題が起きる可能性
がある。また、一般的に陸側脚位置に運転室への搭乗部があることから、特にクレーンの重心が陸側脚に寄ってしまう休業時は、クレーンの姿勢の中でも一番多い時間であり、上記の問題が発生しやすい状況となっている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−192197号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を鑑みてなされたものであり、その目的は、地震が発生したときにクレーンの重心を安定的な位置に確保して、クレーンの脚が浮き上がることを防止することができるクレーン、その免震方法、及びクレーンの横行体の制御方法を提供することである。
【課題を解決するための手段】
【0012】
上記の目的を解決するための本発明のクレーンは、上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動可能なブームの少なくとも1つを備えたクレーンにおいて、地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させているように制御して、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保する制御装置を備えて構成される。
【0013】
この構成によれば、クレーンのトロリーなどの横行体、及びブームを所定の位置へ動かすことで、クレーンの重心を移動して、地震が発生したときにクレーンの重心をクレーンのどの脚にも重心が片寄ることがない位置であるクレーンの脚間の略中間の位置に確保し、クレーンの重心を安定させることができる。これにより、地震時に重心がクレーンのどちらかの脚に寄っている場合に発生する他方の脚が浮いてしまうという問題を解決し、クレーンの走行装置の脱輪やクレーンの倒壊を防ぐことができる。
【0014】
また、上記のクレーンがアウトリーチ側脚とバックリーチ側脚とを備え、前記クレーンの荷役作業中に地震の発生を検知すると、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記横行体を横行させる手段を備える。
【0015】
この構成によれば、クレーンが荷役作業中に、地震の発生を地震の発生前に地震速報などで検知して、地震発生前に、30t〜60tの重さを持つトロリーを動かして、どちらか一方の脚寄りになっているクレーンの重心をアウトリーチ側脚とバックリーチ側脚の略中間に確保することができる。これにより、クレーンの重心が安定的な位置に確保され、クレーンの脚の浮き上がりを防ぐことができる。この地震の発生を検知する手段(地震検知手段)は緊急地震速報受信器が地震速報を受信することで、地震発生前に地震の検知を行う手段である。
【0016】
例えば、岸壁クレーンのトロリーがアウトリーチに位置して、荷役を行っている場合は、クレーンの重心は海側脚(アウトリーチ側脚)に寄っている。そこで、地震の発生を検知すると荷役作業を止めて、トロリーを陸側(バックリーチ側)へ横行させることで、クレーンの重心を移動し、クレーンの重心を安定する位置に確保することができる。また、トロリーがバックリーチで作業している場合も、同様にトロリーを海側(アウトリーチ側)へ横行させ、安定する位置へクレーンの重心を移動することができる。
【0017】
また、荷役作業中は危険なので、予報を検知して運転手をはじめとした現場関係者の安全を確認した後に、運転室、又は搭乗部に設けた回避ボタンを押下すると自動でトロリーが適切な位置に横行するように構成してもよい。
【0018】
加えて、上記のクレーンがアウトリーチ側脚とバックリーチ側脚とを備え、前記アウトリーチ側脚の近傍に、前記クレーンの休業時の前記横行体の係留位置を備える。
【0019】
この構成によれば、クレーンの休業時に、海側脚の近傍にトロリーの係留位置を備えることで、休業時のクレーンの重心を安定した位置に確保することができる。そのため、作業時の体勢よりも長く待機している休業時の体勢でも、地震の発生時の重心が安定する。従来では陸側脚の近傍にトロリーの係留位置を配置しており、その場合に発生していた海側脚の浮き上がりを防止することができる。
【0020】
さらに、上記のクレーンにおいて、前記バックリーチ側脚に前記横行体への搭乗部を備え、前記搭乗部で運転員が前記横行体の運転室から乗り降りするときに、前記制御装置が前記搭乗部に前記横行体を横行させる手段を備える。
【0021】
この構成によれば、上記に記載の作用効果を得ることができると共に、陸側脚の近傍に搭乗部を設け、運転員が乗り降りするときにトロリーをその搭乗部に移動させることで、船舶との接触の危険を避けることができ、安全に運転員がトロリーに乗り降りすることができる。
【0022】
一方、上記のクレーンにおいて、前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、地震が発生したときに、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記ブームを移動させる前記所定の位置を、休業中の前記ブームの位置と荷役作業中の前記ブームの位置の間に設ける。
【0023】
この構成によれば、ブームを所定の位置に移動させることで、どちらか一方の脚寄りになっているクレーンの重心をアウトリーチ側脚とバックリーチ側脚の略中間に確保することができる。例えば、クレーンの休業中に上がっているブームを、地震発生時に下げることで、陸側脚(バックリーチ側脚)に寄っていた重心を安定する位置に移動することができる。
【0024】
このブームを移動させる所定の位置は、休業中のブームの位置と荷役作業中のブームの位置の間であり、好ましくは荷役作業中のブームの位置から上方45°よりも大きい角度を示す位置である。
【0025】
上記の問題を解決するためのクレーンの免震方法は、上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動するブームの少なくとも1つを備えたクレーンの免震方法であって、地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させて、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保することを特徴とする方法である。
【0026】
この方法によれば、地震が発生したときにクレーンの重心を安定的な位置に確保することで、クレーンの重心が寄っている場合に発生するクレーンのどちらかの脚の浮き上がりを防止することができる。
【0027】
上記の問題を解決するためのクレーンのトロリーの制御方法は、クレーンの横行体の制御方法であって、休業時の前記クレーンの重心を前記クレーンの脚間の略中間の位置に確
保するように、前記横行体を所定の位置に係留する。
【0028】
この方法によれば、クレーンの姿勢の中で一番多い休業中のクレーンの重心を、常に安定する位置に確保することができるため、休業中に地震が発生してもクレーンの脚の浮き上がりを防止することができる。
【発明の効果】
【0029】
本発明によれば、地震が発生したときにクレーンの重心を安定的な位置に確保して、クレーンの脚が浮き上がることを防止することができる。そのため、クレーンの走行装置の脱輪、及びクレーンの倒壊を防ぐことができる。
【図面の簡単な説明】
【0030】
【図1】本発明に係る第1の実施の形態の免震クレーンの荷役作業中を示した正面図である。
【図2】本発明に係る第1の実施の形態の免震クレーンの制御装置を示した概略図である。
【図3】本発明に係る第1の実施の形態の免震クレーンの荷役作業中の免震方法を示したフローチャートである。
【図4】本発明に係る第1の実施の形態の免震クレーンの休業中を示した正面図である。
【図5】本発明に係る第1の実施の形態の免震クレーンの休業中の免震方法を示したフローチャートである。
【図6】本発明に係る第2の実施の形態の免震クレーンの休業中を示した正面図である。
【図7】本発明に係る第3の実施の形態の免震クレーンの休業中を示した正面図である。
【図8】本発明に係る第3の実施の形態の免震クレーンのトロリーの制御方法を示したフローチャートである。
【図9】本発明に係る第4の実施の形態の免震クレーンの休業中を示した正面図である。
【図10】本発明に係る第4の実施の形態の免震クレーンの休業中の免震方法を示したフローチャートである。
【図11】従来のクレーンの荷役作業中を示した正面図である。
【図12】従来のクレーンの休業中を示した正面図である。
【発明を実施するための形態】
【0031】
以下、本発明に係る実施の形態のクレーンとその免震方法について、図面を参照しながら説明する。なお、図11及び12と同様の構成については、同一符号を用い、その説明を省略する。
【0032】
本発明の実施の形態は、クレーンとして、コンテナターミナルなどの港湾で使用される岸壁クレーン、移動型のジブクレーン、アンローダークレーン、及びロープロファイルクレーンなど、上部構造を横行する横行体、又は移動するブームを有し、その横行体とブームの少なくとも1つを動かすことによって重心を移動可能なクレーンに適用することができる。好ましくは、上記のクレーンに、地震の振動を吸収するように積層ゴムなどの免震装置を設けた装置に適用すると効果的である。よって、実施の形態の説明では免震クレーンとして説明する。
【0033】
最初に本発明に係る第1の実施の形態のクレーンについて、図1を参照しながら説明する。ここで、免震クレーン1の横行方向をx方向、免震クレーン1の走行方向をy方向、
上下方向をz方向とする。また、この免震クレーン1の海側脚2のx軸上の位置を海側脚位置(アウトリーチ側脚位置)L1、陸側脚3のx軸上の位置を陸側脚位置(バックリーチ側脚位置)L2とする。
【0034】
この免震クレーン1のブーム11とガータ7からなる桁部の海側脚位置L2の近傍に、地震発生時にトロリー(横行体)12が停止する位置である重心安定停止位置P1を設ける。また、この免震クレーン1は機械室8に制御装置20を備える。
【0035】
この重心安定停止位置P1は、免震クレーン1の形状、トロリー12と運転室13と吊り具14を含めた重量、機械室8の重量、アウトリーチR1の長さ、スパンR2の長さ、及びバックリーチR3の長さによって定められる位置である。この重心安定停止位置P1は、好ましくはトロリー12がその位置で停止したときに、免震クレーン1の重心g1が海側脚(アウトリーチ側脚)2と陸側脚(バックリーチ側脚)3のどちらにも片寄らない位置であり、より好ましくは海側脚2と陸側脚3との略中間の位置である。
【0036】
この実施の形態の免震クレーン1は、岸壁クレーンであり、この重心安定停止位置P1は海側脚位置L1の近傍とする。また、重心安定停止位置P1は、免震クレーン1の重心g1が海側脚2と陸側脚3との略中間の確保することができれば、上記の位置に限定しない。
【0037】
免震クレーン1は、トロリー12を重心安定停止位置P1に配置することで、免震クレーン1の重心g1を海側脚2と陸側脚3との略中間の位置である安定的な位置に確保することができる。よって、地震が発生したときに免震クレーン1の重心g1が海側脚2又は陸側脚3のどちらか一方に片寄っていないため、x方向の地震の振幅によって、海側脚2又は陸側脚3が浮き上がることを防止することができる。これにより、走行装置4の脱輪を防止すること、及び免震クレーン1の倒壊を防ぐことができる。
【0038】
制御装置20は、免震クレーン1の各部の制御を行う装置である。この制御装置20は、図2に示すように、ブーム11とトロリー12の制御を行う。また、地震検知手段21、トロリー位置検知手段22、ブーム位置検知手段23、荷役状況検知手段24、及び乗降検知手段25の情報を受信する。
【0039】
地震検知手段21は、緊急地震速報受信器26が受信した地震速報により、地震の発生を予測する手段であり、地震の発生を検知するとその情報を制御装置20へと送る。トロリー位置検知手段22は、トロリー12の位置を常に検知している。ブーム位置検知手段23は、ブーム11が上がっているか下がっているかを検知している。荷役状況検知手段24は吊り具14でコンテナ(吊荷)を吊っているか否かを検知している。乗降検知手段25は、運転手の運転室13への乗り降りを検知している。各検知手段21〜25は、必要な情報を検知することができればよく、周知のセンサ、又は周知の方法を用いることができる。
【0040】
次に本発明に係る第1の実施の形態の免震クレーン1の荷役作業中の動作について図1及び図3を参照しながら説明する。図1に示すように、免震クレーン1が荷役作業中で、トロリー12がアウトリーチR1に位置するときに、緊急地震速報が発せられると、制御装置20は、図3に示す免震方法S10を行う。
【0041】
最初に、緊急地震速報受信器26が、地震速報を受信したか否かを判断するステップS11を行う。このステップS11で地震速報を受信すると、その情報を制御装置20へと送りステップS12へと進む。次に、制御装置20は、荷役状況検知手段24の情報から、荷役作業中か否かを判断するステップS12を行う。ステップS12で荷役作業中と判
断された場合は、制御装置20は、運転手に荷役作業を中止するよう警報を送り、荷役作業を中断するステップS13を行わせる。
【0042】
このステップS13は、例えば船舶Sから吊荷を巻き上げた直後の場合は、再度船舶S上に吊荷を下ろし、また、トロリー12の近傍まで巻き上げている場合は、吊荷を吊ったままにするなど、荷役状況によって変わる。
【0043】
次に、制御装置20は、トロリー位置検知手段22の情報から、トロリー12の現在位置が重心安定停止位置P1か否かを判断するステップS14を行う。トロリー12の現在位置が重心安定停止位置P1で無い場合は、トロリー12を重心安定停止位置P1まで横行させるステップS15を行い、トロリー12が重心安定停止位置P1で停止するとこの免震方法S10は完了する。
【0044】
また、緊急地震速報受信器26が地震速報を受信すると、制御装置20が警報を鳴動させ、安全ランプの点灯を警告用に切り換え、トロリー12が重心安定停止位置P1近傍の安定位置圏内に入ったら警報を鳴動させたまま、安全ランプの点灯を通常に戻すステップを追加してもよい。
【0045】
加えて、上記の免震方法S10は制御装置20によって自動的に行われる方法を説明したが、荷役作業中は危険なので、ステップS11で地震の発生を検知すると、運転手をはじめとした現場関係者の安全を確認した後に、運転室13、又は搭乗部9aに設けた回避ボタン(図示せず)を押下すると自動でトロリー12が重心安定停止位置P1に横行するようなステップを追加してもよい。
【0046】
この免震方法S10によって、アウトリーチR1で作業していたトロリー12を地震が発生する前に予め重心安定停止位置P1に停止させることができ、免震クレーン1の重心g1を海側脚2と陸側脚3との略中間の安定的な位置に確保することができる。これにより、地震が発生して、x方向の地震の振幅を受けても、地震の発生時には免震クレーン1の重心g1が海側脚2又は陸側脚3のどちらか一方に片寄っていないため、海側脚2又は陸側脚3の浮き上がりを防止することができる。
【0047】
同様にスパンR2、及びバックリーチR3にトロリー12が位置する場合も上記の方法を行い、陸側脚3によっていた重心g1を、海側脚2と陸側脚3との間の安定的な位置に確保することができる。
【0048】
次に、本発明に係る第1の実施の形態の免震クレーン1の休業中の動作について、図4を参照しながら説明する。免震クレーン1は、休業中は船舶Sとの接触の危険性を避けるためブーム11を上げた姿勢を保持している。また、同様の理由に加えて、運転手又は他の作業員の安全性の観点から船舶との接触の危険性がない陸側脚位置L2の近傍に搭乗部9を設け、また、その搭乗部9に運転室13を位置するように係留されている。このトロリー12が係留されている位置を係留位置P2とする。
【0049】
免震クレーン1が休業中に地震が発生すると、図5に示す、免震方法S20を行う。ステップS21で緊急地震速報受信器26が地震速報を受信すると、制御装置20は、トロリー12を係留位置P2から重心安定停止位置P1まで横行させるステップS22を行う。この免震方法S20によって、陸側脚4側に重心g2が寄っている休業中の免震クレーン1の重心g2を海側脚2と陸側脚3との略中間の安定的な位置に確保することができる。
【0050】
上記の方法によれば、休業中で、陸側脚4の近傍の係留位置P2に停止しているトロリ
ー12を、地震の発生前に、重心安定停止位置P1へ横行させることができるので、地震の発生時に免震クレーン1の重心g2を安定的な位置に確保することができる。これにより、荷役作業中よりも多い時間である休業中に、地震が発生しても、免震クレーン1の海側脚3の浮き上がりを防止することができる。
【0051】
次に、本発明に係る第2の実施の形態のクレーンについて、図6を参照しながら説明する。免震クレーン30は、搭乗部31を海側脚位置L1の近傍に設け、また、係留位置P3も海側脚位置L1の近傍に設ける。この係留位置P3は、重心安定停止位置P3でもある。その他の構成は図1及び図4に示す免震クレーン1と同様である。
【0052】
この構成によれば、搭乗部31を海側脚2側に設けることにより、トロリー12の係留位置P3を重心安定停止位置P3にすることができる。そのため、従来の図11に示すクレーンが、搭乗部を陸側脚位置L2に設けていたため発生していた、休業時に重心g3が海側脚3に寄ってしまう問題を解決することができる。
【0053】
次に、本発明に係る第3の実施の形態のクレーンについて、図7を参照しながら説明する。免震クレーン40は、休業中のトロリー12の係留位置P4を海側脚位置L1の近傍に設ける。この係留位置P4は、重心安定停止位置P3でもある。その他の構成は図1及び図4に示す免震クレーン1と同様である。
【0054】
次に、本発明に係る第3の実施の形態の免震クレーン40の動作について、図8を参照しながら説明する。荷役作業が完了し、運転手はトロリー12を搭乗部9へ移動し、搭乗部9でトロリー12を停止して、運転室14から降車する。そこから免震クレーン40のトロリーの制御方法S30を開始する。
【0055】
先ず、制御装置20は、乗降検知手段25の情報により、運転手が乗り降り口9aに移動したか否かを判断するステップS31を行う。運転手が運転室14から降車したことを確認すると、次に、トロリー12を重心安定停止位置P4でもある係留位置P4へ移動するステップS32を行う。トロリー12を係留位置P4に係留して、免震クレーン40は休業する(ステップS33)。
【0056】
免震クレーン40の運転を再開するときに、制御装置20は、乗降検知手段25の情報により、運転手が乗り降り口9aに待機しているか否かを判断するステップS34を行う。運転手が乗り降り口9aに待機していることを確認すると、次に、制御装置20は、トロリー12を係留位置P4から搭乗部9へ移動するステップS35を行う。運転手が運転室14に搭乗する(ステップS36)と完了する。
【0057】
上記のステップS31とS34の代わりに、乗り降り口9aにトロリー12を係留位置P4へ移動させる、及び係留位置P4から搭乗部9へ移動させるボタンを設けて、運転手がそのボタンを押したときに上記のようにトロリー12を移動させる方法を用いてもよい。
【0058】
上記の方法によれば、陸側脚3側に運転室14への搭乗部9を備える免震クレーン40の休業中の重心g4を、地震の発生前に安定的な位置に確保することができる。免震クレーン40は作業中よりも、休業時の姿勢で待機している時間の方が長く、休業時に地震が発生する確率が高い。その休業時の姿勢を、予め重心g4が安定している姿勢にすることで、地震が発生しても、海側脚2又は陸側脚3の浮き上りを防ぐことができる。
【0059】
また、搭乗部9を従来のクレーンと同様に、陸側脚位置L2に設けることができるので、免震性の向上と共に安全性を確保することができる。加えて、係留位置P4を変更する
だけでよく、コストをかけずに休業時に発生する地震への対策を行うことができる。
【0060】
次に、本発明に係る第4の実施の形態のクレーンについて、図9を参照しながら説明する。免震クレーン50は、免震クレーン50の休業時に可動させて、免震クレーン50の重心g5を海側脚2と陸側脚3の略中間の安定的な位置に確保することができるブーム51を備える。その他の構成は図6に示す免震クレーン40と同様である。
【0061】
この免震クレーン50に、トロリー12の重心安定停止位置P5と、ブーム51の重心安定角度P6とを設ける。この重心安定角度P6は、ブーム51のxy平面に対する角度で、免震クレーン50の形状、ブーム51の全長などの条件により設定される角度であり、好ましくは休業中のブーム51の位置と荷役作業中のブーム51の位置との間の角度であり、より好ましくは上記のトロリー12の横行と合せて、免震クレーン50の重心g5を海側脚2と陸側脚3の略中間の安定的な位置に確保することができる角度である。
【0062】
この免震クレーン50の動作について、図9を参照しながら説明する。荷役作業が完了して、運転手が運転室14から降車して、トロリー12を重心安定停止位置P5でもある係留位置P5に停止するまでは、前述の制御方法S30と同様に行う。
【0063】
休業中に、この免震クレーン40は免震方法S40を行う。ステップS41は、前述の免震方法S10で説明した地震の検知方法と同様である。ステップS41で、地震が発生すると予測されると、ブーム51を重心安定角度P6まで下げるステップS42を行い、完了する。
【0064】
この方法によれば、休業中に上方に上がっているブーム51を重心安定角度P6まで下げることで、免震クレーン50の重心g5を安定的な位置に確保することができる。これにより、休業中の地震による海側脚2の浮き上がりを防止することができる。
【0065】
上記の免震方法S40は、ブーム51上にトロリー12が横行していなければ、荷役作業中に行うこともできる。その場合は、ブーム51を重心安定角度P6まで上げることで、免震クレーン40の重心g5を移動し、免震クレーン40の重心g5を安定する位置に確保することができる。
【0066】
この実施の形態では起伏するブーム51について説明したが、例えば、ロープロファイルクレーンなどで、海陸方向に摺動するブームを有している場合は、所定の位置までブームを移動することで、上記と同様の作用効果を得ることができる。
【0067】
上記の免震方法又は制御方法S10、S20、S30、及びS40はそれぞれ組み合わせて行うこともできる。
【産業上の利用可能性】
【0068】
本発明のクレーンは、トロリー、及びブームを動かすことで、クレーンの重心を移動して、クレーンの重心を安定する位置に確保することができ、重心が一方の脚に寄って、他方の脚が浮いてしまうことを防止することができるので、特に、免震装置を備えた港湾荷役機器に利用することができる。
【符号の説明】
【0069】
1、30、40、50 免震クレーン
2 海側脚(アウトリーチ側脚)
3 陸側脚(バックリーチ側脚)
4 走行装置
5 下部構造物
6 上部構造物
7 ガータ
8 機械室
9 搭乗部
11 ブーム
12 トロリー(横行体)
20 制御装置
P1 重心安定停止位置
P2 係留位置
P3、P4、P5 係留位置(重心安定停止位置)
P6 重心安定角度
g1〜5 重心
L1 海側脚位置(アウトリーチ側脚位置)
L2 陸側脚位置(バックリーチ側脚位置)
【特許請求の範囲】
【請求項1】
上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動可能なブームの少なくとも1つを備えたクレーンにおいて、
地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させているように制御して、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保する制御装置を備えることを特徴とするクレーン。
【請求項2】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
前記クレーンの荷役作業中に地震の発生を予測すると、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記横行体を横行させる手段を備えることを特徴とする請求項1に記載のクレーン。
【請求項3】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
前記アウトリーチ側脚の近傍に、前記クレーンの休業時の前記横行体の係留位置を備えることを特徴とする請求項1に記載のクレーン。
【請求項4】
前記バックリーチ側脚に前記横行体への搭乗部を備え、
前記搭乗部で運転員が前記横行体の運転室から乗り降りするときに、前記制御装置が前記搭乗部に前記横行体を横行させる手段を備えることを特徴とする請求項3に記載のクレーン。
【請求項5】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
地震が発生したときに、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記ブームを移動させる前記所定の位置を、休業中の前記ブームの位置と荷役作業中の前記ブームの位置の間に設けることを特徴とする請求項1〜4のいずれか1項に記載のクレーン。
【請求項6】
上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動するブームの少なくとも1つを備えたクレーンの免震方法であって、
地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させて、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保することを特徴とするクレーンの免震方法。
【請求項7】
クレーンの横行体の制御方法であって、休業時の前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保するように、前記横行体を所定の位置に係留することを特徴とするクレーンの横行体の制御方法。
【請求項1】
上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動可能なブームの少なくとも1つを備えたクレーンにおいて、
地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させているように制御して、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保する制御装置を備えることを特徴とするクレーン。
【請求項2】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
前記クレーンの荷役作業中に地震の発生を予測すると、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記横行体を横行させる手段を備えることを特徴とする請求項1に記載のクレーン。
【請求項3】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
前記アウトリーチ側脚の近傍に、前記クレーンの休業時の前記横行体の係留位置を備えることを特徴とする請求項1に記載のクレーン。
【請求項4】
前記バックリーチ側脚に前記横行体への搭乗部を備え、
前記搭乗部で運転員が前記横行体の運転室から乗り降りするときに、前記制御装置が前記搭乗部に前記横行体を横行させる手段を備えることを特徴とする請求項3に記載のクレーン。
【請求項5】
前記クレーンがアウトリーチ側脚とバックリーチ側脚とを備え、
地震が発生したときに、前記クレーンの重心を前記アウトリーチ側脚と前記バックリーチ側脚の略中間に位置に確保するように、前記制御装置が前記ブームを移動させる前記所定の位置を、休業中の前記ブームの位置と荷役作業中の前記ブームの位置の間に設けることを特徴とする請求項1〜4のいずれか1項に記載のクレーン。
【請求項6】
上部構造物を横行する横行体と、前記上部構造物の一部を構成し、船舶との接触を避けるために移動するブームの少なくとも1つを備えたクレーンの免震方法であって、
地震が発生したときに、前記横行体と前記ブームの少なくとも1つを所定の位置へ移動させる、又は予め移動させて、前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保することを特徴とするクレーンの免震方法。
【請求項7】
クレーンの横行体の制御方法であって、休業時の前記クレーンの重心を前記クレーンの脚間の略中間の位置に確保するように、前記横行体を所定の位置に係留することを特徴とするクレーンの横行体の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−86906(P2013−86906A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227956(P2011−227956)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
[ Back to top ]