
クレーンのウィンチ動作制御装置
【課題】電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにウィンチに高トルクを付与し、且つ、ウィンチに与えられるトルクに抜けが生じるのを防ぐ。
【解決手段】クレーンのウィンチ動作制御装置1では、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が予め設定された設定値よりも大きい場合には、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させ、モーメントリミッタ12によって導出されたロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50に動力を供給させず、吊荷用ウィンチ電動機2のみから吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させる。
【解決手段】クレーンのウィンチ動作制御装置1では、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が予め設定された設定値よりも大きい場合には、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させ、モーメントリミッタ12によって導出されたロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50に動力を供給させず、吊荷用ウィンチ電動機2のみから吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、クレーンのウィンチ動作制御装置に関するものである。
【背景技術】
【0002】
従来、クレーンでは、ブーム等の起伏部材の先端から吊りロープを介して吊荷を吊り下げ、その吊りロープをウィンチによって巻き取り及び繰り出すことによって吊荷を昇降させる。下記特許文献1には、この吊荷を昇降させるウィンチを駆動し且つそのウィンチの動作を制御するための技術が開示されている。下記特許文献1に開示されている技術では、ウィンチに掛かる吊りロープの巻上げ負荷の大きさに応じて電動機がウィンチを駆動するか又は油圧モータがウィンチを駆動するかをクラッチで切り換えるようになっている。具体的には、下記特許文献1では、電動機と油圧モータの両方からウィンチに動力を供給可能となっており、電動機とウィンチとの間の動力の伝達経路と油圧モータとウィンチとの間の動力の伝達経路とにそれぞれクラッチが設けられている。そして、ウィンチに高負荷が掛かる場合には、電動機側のクラッチを切断状態にするとともに油圧モータ側のクラッチを連結状態にして油圧モータにウィンチを駆動させ、ウィンチに低負荷しか掛からない場合には、電動機側のクラッチを連結状態にするとともに油圧モータ側のクラッチを切断状態にして電動機にウィンチを駆動させる。この技術によれば、ウィンチに低負荷しか掛からない場合に電動機がウィンチを駆動するため、電動機に高トルクが必要とされず、電動機の大型化を防ぐことが可能である。また、電動機は、油圧モータに比べて駆動効率が高いため、この技術によれば、常に油圧モータのみがウィンチを駆動するような構成に比べてウィンチの駆動効率を向上することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−276989号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に記載の技術では、ウィンチに高負荷が掛かるときには、油圧モータが単独でウィンチを駆動することになるため、油圧モータに高トルクが必要とされ、その結果、油圧モータを大型化せざるを得なくなる。また、上記特許文献1に記載の技術では、ウィンチに掛かる負荷が低負荷と高負荷との間のしきい値に達したときに、ウィンチに与えられるトルクに抜けが生じる虞がある。例えば、接地状態の吊荷を吊り上げるいわゆる地切り作業を行う場合には、最初は吊りロープがたるんでいてウィンチに吊荷の荷重が作用していないためウィンチに掛かる負荷は低いが、ウィンチが吊りロープを巻き取って吊荷の荷重がウィンチに作用するとウィンチに掛かる負荷が増加し、その後、吊荷が地面を離れると吊荷の全荷重がウィンチに作用してウィンチに高負荷が掛かる。この際、ウィンチに掛かる負荷が低負荷からしきい値に達して高負荷になった瞬間に電動機側のクラッチの連結状態から切断状態への切り換えと油圧モータ側のクラッチの切断状態から連結状態への切り換えが同時に行われるため、電動機と油圧モータの両方からウィンチにトルクが供給されない状態、すなわちトルクの抜けが一時的に生じる。この場合には、吊荷の吊り上げ速度が不連続になったり、吊荷にショックが与えられて吊荷が外れたりする虞がある。
【0005】
また、上記の吊荷の昇降用のウィンチに係る問題と同様の問題が、起伏部材の起伏用のウィンチでも生じる虞がある。具体的には、例えば、起伏部材が前方に倒伏されていてその起伏部材の先端が地面に当接しており、当該起伏部材を後方から支持する起伏用のロープがたるんでいる状態では、その起伏用のロープの巻き取り及び繰り出しを行って起伏部材を起伏させる起伏用のウィンチに掛かる負荷は小さいが、そのウィンチが起伏用のロープを巻き取って起伏部材の荷重がウィンチに作用するとウィンチに掛かる負荷が増加し、その後、起伏部材の先端が地面から離れると起伏用ロープを介して起伏用ウィンチに掛かる荷重が急増し、その結果、起伏用ウィンチに高負荷が掛かる。この際、上記の吊荷の昇降用のウィンチの場合と同様に、起伏用ウィンチに与えられるトルクに抜けが生じる虞がある。
【0006】
この発明は、上記の課題を解決するためになされたものであり、その目的は、電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにウィンチに高トルクを付与することが可能であり、且つ、ウィンチに与えられるトルクに抜けが生じるのを防ぐことが可能なクレーンのウィンチ動作制御装置を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明によるクレーンのウィンチ動作制御装置は、吊荷を吊るロープの巻き取り及び繰り出しを行ってその吊荷を昇降させるウィンチを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方に前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみに前記ウィンチへ動力を供給させて前記ウィンチを作動させる(請求項1)。
【0008】
また、本発明によるクレーンのウィンチ動作制御装置は、起伏自在となるように設けられた起伏部材と、その起伏部材を後方から支持しながら起伏させるためのロープの巻き取り及び繰り出しを行うウィンチとを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方に前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみに前記ウィンチへ動力を供給させて前記ウィンチを作動させる(請求項2)。
【0009】
上記各クレーンのウィンチ動作制御装置では、ウィンチに掛かるロープの張力が設定値よりも大きくなった場合、すなわち、ウィンチに高負荷が掛かったときには、電動機と油圧モータの両方からウィンチへ動力を供給するため、ウィンチに高トルクを付与することができる。一方、ウィンチに掛かるロープの張力が設定値以下になった場合、すなわち、ウィンチに低負荷しか掛かっていないときには、油圧モータに比べて駆動効率の良い電動機のみによってウィンチを駆動するため、ウィンチの駆動効率を向上することができる。そして、このウィンチ動作制御装置では、ウィンチに高負荷が掛かったときには、ウィンチを駆動するための動力を電動機と油圧モータとで分担するため、電動機単体又は油圧モータ単体でウィンチを駆動する場合に比べて、電動機と油圧モータのそれぞれに要求されるトルクは小さくなる。また、ウィンチに低負荷しか掛かっていないときには、電動機のみによってウィンチを駆動するが、このときのウィンチの駆動に必要とされるトルクは小さい。従って、このウィンチ動作制御装置では、電動機及び油圧モータの大型化を防ぐことができる。さらに、このウィンチ動作制御装置では、ウィンチに掛かるロープの張力が設定値よりも大きい場合及び設定値以下である場合のいずれの場合も、電動機は、ウィンチに動力を供給してウィンチを作動させるため、ウィンチに掛かるロープの張力が設定値以下から設定値よりも大きくなるとき又は設定値よりも大きい状態から設定値以下へ低下するとき、すなわち、ウィンチに掛かる負荷が低負荷から高負荷へ又は高負荷から低負荷へ変化するときに、少なくとも電動機からのトルクは常にウィンチに付与されている。このため、吊荷を昇降させるウィンチでは、吊荷の昇降時にそのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。また、起伏部材を起伏させるためのウィンチでは、起伏部材の起伏時にそのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。
【0010】
上記クレーンのウィンチ動作制御装置において、前記クレーンには、前記ウィンチを操作するための操作レバーが設けられ、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記電動機が出力するトルクが前記操作レバーの操作量に応じたトルクとなるように前記電動機の動作を制御するとともに、前記操作レバーの操作量に応じた流量の圧油を前記油圧モータに供給して前記油圧モータの回転数を制御することによって前記ウィンチの回転数を当該油圧モータの回転数に応じた回転数とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記電動機の回転数が前記操作レバーの操作量に応じた回転数となるように前記電動機の動作を制御するとともに前記油圧モータが作動しないようにして前記ウィンチの回転数を前記電動機の回転数に応じた回転数にすることが好ましい(請求項3)。
【0011】
この構成によれば、ウィンチに掛かるロープの張力が設定値よりも大きくなって電動機と油圧モータの両方からウィンチへ動力を供給する時に、ウィンチの回転数は、操作レバーの操作量に応じた油圧モータの回転数によって制御されるため、電動機の回転数制御と油圧モータの回転数制御とが干渉するのを防ぐことができる。仮に、電動機と油圧モータの両方からウィンチへ動力を供給する時に電動機の回転数と油圧モータの回転数の両方を制御することによってウィンチの回転数を制御しようとすると、電動機の回転数制御と油圧モータの回転数制御とが互いに干渉してウィンチの回転数を有効に制御できない場合がある。これに対して、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に油圧モータの回転数に応じてウィンチの回転数が制御されるので、上記のような電動機の回転数制御と油圧モータの回転数制御との干渉が生じるのを防ぐことができ、ウィンチの回転数を有効に制御することができる。さらに、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に、電動機のトルクが操作レバーの操作量に応じたトルクとなるように電動機の動作を制御するため、電動機に不必要な過剰なトルクを出力させるのを防ぐことができる。従って、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に、トルクのロスを削減しつつ、電動機と油圧モータの両者で協調してウィンチの回転数及び駆動トルクを操作レバーの操作量に応じた値に制御することができる。また、本構成では、ウィンチに掛かるロープの張力が設定値以下となって電動機のみからウィンチへ動力を供給する時には、油圧モータは作動せず、操作レバーの操作量に応じた電動機の回転数に従ってウィンチの回転数が制御されるため、この時も、ウィンチの回転数を操作レバーの操作量に応じた回転数に制御することができる。
【0012】
上記クレーンのウィンチ動作制御装置において、前記電動機に電気的に接続され、前記ウィンチの回転速度が低下する時又は前記ウィンチが前記ロープを繰り出す時には前記電動機によって回生された電力を蓄え、前記ウィンチの回転速度を上昇させる時又は前記ウィンチが前記ロープを巻き取る時には蓄えた電力を前記電動機へ供給する蓄電装置をさらに備えていることが好ましい(請求項4)。
【0013】
この構成によれば、吊荷を昇降させるウィンチでは、当該ウィンチの回転速度の低下時や当該ウィンチが吊荷を降下させる時に得られる運動エネルギや位置エネルギを電力として回生し、その電力を用いて、当該ウィンチの回転速度の上昇時や当該ウィンチが吊荷を上昇させる時に電動機に当該ウィンチを駆動させることができる。また、起伏部材を起伏させるためのウィンチでは、当該ウィンチの回転速度の低下時や当該ウィンチが起伏部材を前方へ倒伏させるように巻き下げる時に得られる運動エネルギ及び位置エネルギを電力として回生し、その電力を用いて、当該ウィンチの回転速度の上昇時や当該ウィンチが起伏部材を起立させるように巻き上げる時に電動機に当該ウィンチを駆動させることができる。従って、吊荷を昇降させるウィンチ及び起伏部材を起伏させるウィンチのいずれに関しても、省エネルギ効果を得ることができる。
【0014】
上記クレーンのウィンチ動作制御装置において、前記油圧モータは、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能であり、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータを前記動力出力状態にさせ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータを前記動力非出力状態にさせることが好ましい(請求項5)。
【0015】
この構成によれば、張力導出装置によって導出されたウィンチに掛かるロープの張力が設定値以下である場合には、油圧モータを動力非出力状態にさせるため、ウィンチに掛かるロープ張力の大きさに関わらず常に油圧モータに動力を出力させる場合に比べて、油圧モータを駆動するための圧油の供給に要する油圧ポンプの動力を削減することができる。このため、省エネルギ効果を向上することができる。
【0016】
この場合において、前記油圧モータは、可変容量型であり、前記制御機構は、前記油圧モータの容量を制御するコントローラを含み、前記コントローラは、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータの容量を所定の容量にすることによって前記油圧モータを前記動力出力状態とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータの容量を0にすることによって前記油圧モータを前記動力非出力状態としてもよい(請求項6)。
【0017】
この構成によれば、張力導出装置によって導出されたロープの張力が前記設定値よりも大きい場合には油圧モータを動力出力状態にさせ、張力導出装置によって導出されたロープの張力が前記設定値以下である場合には油圧モータを動力非出力状態にさせる制御機構を具体的に構成することができる。
【0018】
上記制御機構が前記ロープの張力が設定値よりも大きい場合に油圧モータを動力出力状態にさせ、前記ロープの張力が設定値以下である場合に油圧モータを動力非出力状態にさせる構成において、前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、前記ウィンチ動作制御装置は、前記油圧モータの前記出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態と、前記油圧モータの前記出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態とに切り換わるクラッチをさらに備え、前記制御機構は、前記クラッチを前記接続状態と前記切断状態とに切換制御するコントローラを含み、前記コントローラは、前記油圧モータを前記動力出力状態とするときには前記クラッチを前記接続状態にさせる一方、前記油圧モータを前記動力非出力状態とするときには前記クラッチを前記切断状態にさせてもよい(請求項7)。
【0019】
この構成では、油圧モータを動力非出力状態として当該油圧モータからウィンチへ動力を供給させず、電動機のみにウィンチへ動力を供給させる場合に、クラッチが切断状態にされて油圧モータの出力軸とウィンチの入力軸とが切り離される。このため、電動機のみによってウィンチを駆動するときに油圧モータの空転に起因する負荷が電動機に掛かるのを防ぐことができる。その結果、電動機の駆動効率を向上させることができ、省エネルギ効果を向上することができる。
【0020】
また、上記制御機構が前記ロープの張力が設定値よりも大きい場合に油圧モータを動力出力状態にさせ、前記ロープの張力が設定値以下である場合に油圧モータを動力非出力状態にさせる構成において、前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、前記ウィンチ動作制御装置は、前記油圧モータが前記動力出力状態となって前記出力軸が回転するときにはその出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態になり、前記油圧モータが前記動力非出力状態となって前記出力軸が回転しないときにはその出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態になるワンウェイクラッチをさらに備えていてもよい(請求項8)。
【0021】
この構成によれば、油圧モータが動力非出力状態から動力出力状態になってその油圧モータの出力軸が回転を開始するときにはワンウェイクラッチが自動的に切断状態から接続状態に切り換わる。仮に、油圧モータの動作制御と並行してコントローラがクラッチの切断/接続の切り換え制御を行う場合には、クラッチが接続状態にされるタイミングが油圧モータの出力軸が回転を開始するタイミングよりも僅かに遅くなる場合があり、この場合には、クラッチのウィンチ側と油圧モータ側との間で回転数差が大きくなり、その結果、クラッチの接続時にショックが発生する。本構成では、油圧モータの出力軸が回転を開始すると自動的にワンウェイクラッチが接続状態となるので、そのようなタイミングのずれが生じず、クラッチが接続状態に切り換わるときに発生するショックを抑制できる。
【発明の効果】
【0022】
以上説明したように、本発明によれば、電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにそのウィンチに高トルクを付与することが可能であり、且つ、そのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。
【図面の簡単な説明】
【0023】
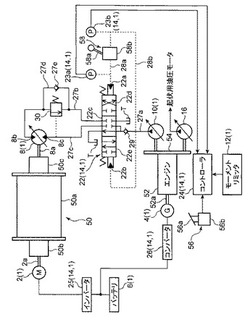
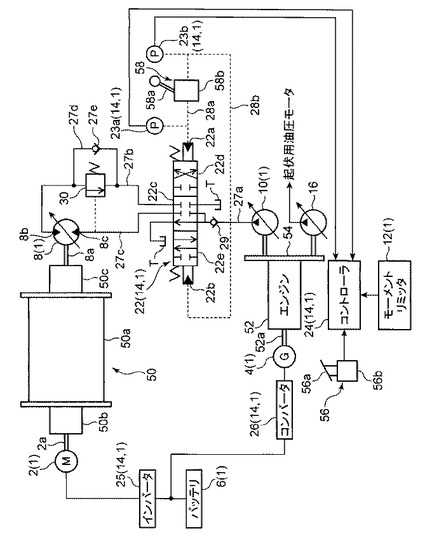
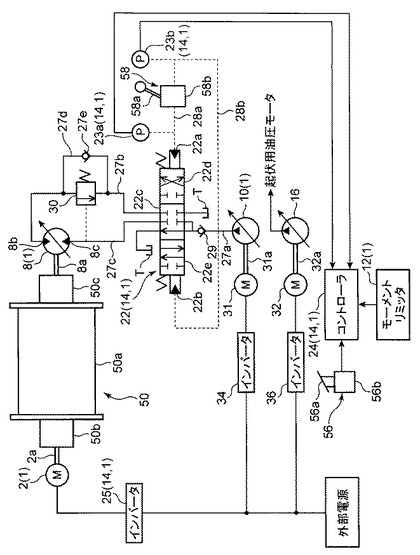
【図1】本発明の第1実施形態によるクレーンのウィンチ動作制御装置の構成を説明するための模式図である。
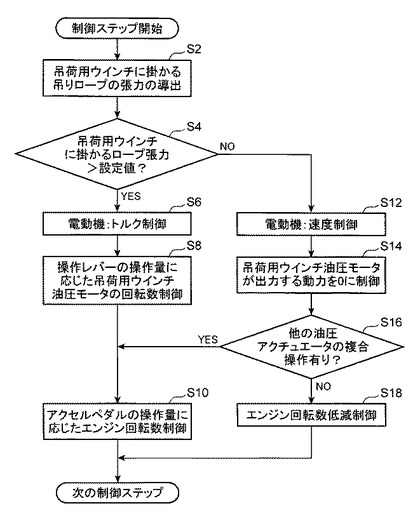
【図2】本発明の第1実施形態のウィンチ動作制御装置による吊荷用ウィンチの動作制御のプロセスを示すフローチャートである。
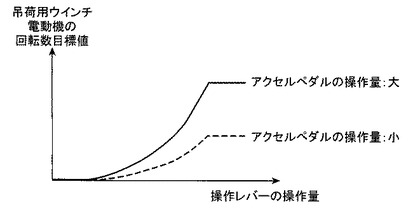
【図3】アクセルペダルの操作量に応じて変化する操作レバーの操作量と吊荷用ウィンチ電動機の回転数目標値との相関関係を示す図である。
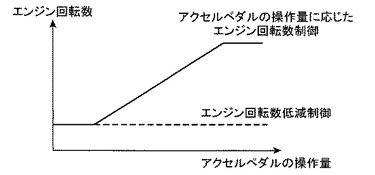
【図4】アクセルペダルの操作量とエンジン回転数との相関関係を示す図である。
【図5】本発明の第2実施形態によるクレーンのウィンチの動作制御装置の構成を説明するための模式図である。
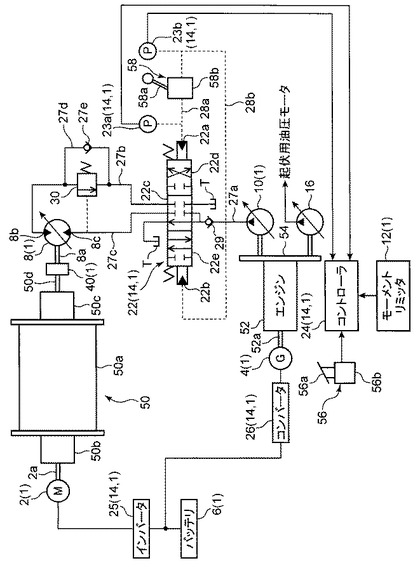
【図6】本発明の第3実施形態によるクレーンのウィンチ動作制御装置の構成を説明するための模式図である。
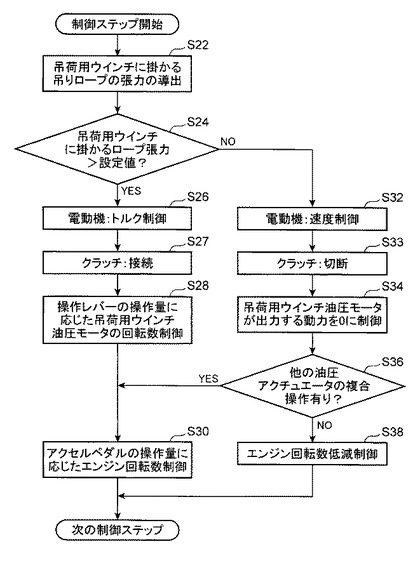
【図7】本発明の第3実施形態のウィンチ動作制御装置による吊荷用ウィンチの動作制御のプロセスを示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を図面を参照して説明する。
【0025】
(第1実施形態)
まず、図1を参照して本発明の第1実施形態によるウィンチ動作制御装置1について説明する。この第1実施形態によるウィンチ動作制御装置1は、クレーンに設けられており、吊荷用ウィンチ50の動作を制御する。吊荷用ウィンチ50は、クレーンの本体に搭載されており、本発明のウィンチの概念に含まれるものである。クレーンは、その本体に起伏自在となるように設けられた起伏部材を備えており、その起伏部材の先端から吊りロープを介して吊り下げられるフック装置によって吊荷が吊られる。吊荷用ウィンチ50は、クレーンの本体に搭載されており、吊りロープの巻き取り及び繰り出しを行ってフック装置とともに吊荷を昇降させる。吊荷用ウィンチ50は、吊りロープが巻かれる吊荷用ウィンチドラム50aと、後述する吊荷用ウィンチ電動機2から出力される動力(回転力)を減速して吊荷用ウィンチドラム50aに伝達する電動機側減速機50bと、後述する吊荷用ウィンチ油圧モータ8から出力される動力(回転力)を減速して吊荷用ウィンチドラム50aに伝達する油圧モータ側減速機50cとを有する。吊りロープは、吊荷用ウィンチドラム50aから起伏部材の先端へ向かって延び、起伏部材の先端に設けられたトップシーブとフック装置に設けられたフックシーブとに複数回掛け回されている。また、クレーンは、その本体に搭載され、起伏部材を起伏させるための起伏用ウィンチを備えている。この起伏用ウィンチは、起伏用油圧モータが出力する動力によって作動して起伏部材に繋がる起伏用ロープの巻き取り及び繰り出しを行い、それによって起伏部材を起伏させる。
【0026】
また、クレーンは、エンジン52と、そのエンジン52が出力する動力を後述する吊荷用油圧ポンプ10と起伏用油圧ポンプ16とに分配する動力分割機構54と、エンジン52の回転数の増減を指示するためのアクセル装置56とを備えている。アクセル装置56は、アクセルペダル56aと、アクセル装置本体56bとを有する。アクセル装置本体56bは、アクセルペダル56aの操作量(踏み込み量)を示すアクセル信号を後述のコントローラ24へ出力し、コントローラ24は、そのアクセル信号が示すアクセルペダル56aの操作量に応じてエンジン52の回転数を増減させる。
【0027】
また、クレーンは、吊荷用ウィンチ50を操作するための操作装置58を備えている。この操作装置58は、操作レバー58aと、操作装置本体58bとを有する。操作レバー58aは、吊荷用ウィンチ50を操作するために用いられるものであり、中立姿勢から一方側とその反対側である他方側とに傾倒可能となるように操作装置本体58bによって支持されている。操作装置本体58bは、操作レバー58aの中立姿勢からの操作量(傾倒量)に応じた大きさのパイロット圧を発生させ、そのパイロット圧を後述する制御弁22の2つのパイロットポート22a,22bのうち操作レバー58aの中立姿勢からの操作方向(傾倒方向)に応じたパイロットポートに供給する。なお、操作レバー58aの操作に応じた吊荷用ウィンチ50の操作に関する詳細な構成については、後述する。
【0028】
この第1実施形態によるウィンチ動作制御装置1は、吊荷用ウィンチ50の動作を制御して吊荷の巻き上げ及び巻き下げを制御する。具体的には、ウィンチ動作制御装置1は、吊荷用ウィンチ電動機2と、発電機4と、バッテリ6と、吊荷用ウィンチ油圧モータ8と、吊荷用油圧ポンプ10と、モーメントリミッタ12と、制御機構14とを備えている。
【0029】
吊荷用ウィンチ電動機2は、電力が供給されることによって作動し、吊荷用ウィンチ50を駆動するための動力を出力する。この吊荷用ウィンチ電動機2が、本発明の電動機の概念に含まれるものである。吊荷用ウィンチ電動機2は、電動機側減速機50bに繋がる出力軸2aを有する。吊荷用ウィンチ電動機2は、出力軸2aを通じて動力(回転力)を電動機側減速機50bへ出力し、その出力された動力は、電動機側減速機50bによって所定の減速比で減速されて吊荷用ウィンチドラム50aへ伝達される。また、吊荷用ウィンチ電動機2は、吊荷用ウィンチ50の回転速度(吊荷用ウィンチドラム50aの回転速度)が低下する時又は吊荷用ウィンチ50が吊りロープを繰り出して吊荷を降下させる時(吊荷の巻き下げ時)には、発電機として機能し、電力の回生を行う。
【0030】
吊荷用ウィンチ電動機2は、後述するインバータ25及びコンバータ26を介して発電機4と電気的に接続されている。また、吊荷用ウィンチ電動機2は、インバータ25を介してバッテリ6と電気的に接続されており、発電機4は、コンバータ26を介してバッテリ6と電気的に接続されている。なお、バッテリ6は、本発明の蓄電装置の概念に含まれるものである。発電機4は、エンジン52の駆動軸52aと接続されており、エンジン52から駆動軸52aを通じて出力される動力を受けて作動し、発電する。発電機4によって発電された電力は、吊荷用ウィンチ電動機2に供給されるとともに、その電力の一部はバッテリ6に蓄えられる。また、バッテリ6は、吊荷用ウィンチ電動機2が発電機として機能して回生した電力を蓄える。そして、バッテリ6は、吊荷用ウィンチ50の回転速度(吊荷用ウィンチドラム50aの回転速度)を上昇させる時又は吊荷用ウィンチ50が吊りロープを巻き取って吊荷を上昇させる時(吊荷の巻き上げ時)には、蓄えた電力を吊荷用ウィンチ電動機2に供給して吊荷用ウィンチ電動機2を作動させる。すなわち、吊荷用ウィンチ電動機2は、発電機4から供給される電力及び/又はバッテリ6から供給される電力によって作動する。
【0031】
吊荷用ウィンチ油圧モータ8は、圧油が供給されることによって作動し、吊荷用ウィンチ50を駆動するための動力を出力する。この吊荷用ウィンチ油圧モータ8は、本発明の油圧モータの概念に含まれるものである。吊荷用ウィンチ油圧モータ8は、動力を出力するための出力軸8aを有し、この出力軸8aは、油圧モータ側減速機50cに繋がる。吊荷用ウィンチ油圧モータ8は、出力軸8aを通じて動力(回転力)を油圧モータ側減速機50cへ出力し、その出力された動力は、油圧モータ側減速機50cによって所定の減速比で減速されて吊荷用ウィンチドラム50aへ伝達される。吊荷用ウィンチ油圧モータ8は、圧油が供給される巻上側供給口8b及び巻下側供給口8cを有する。吊荷用ウィンチ油圧モータ8は、巻上側供給口8bに圧油が供給された場合には、吊荷を巻き上げる方向に吊荷用ウィンチドラム50aを回転させる回転力を発するように作動するとともに、その巻上側供給口8bに供給される圧油の流量に応じた回転数の回転力を出力する。また、吊荷用ウィンチ油圧モータ8は、巻下側供給口8cに圧油が供給された場合には、吊荷を巻き下げる方向に吊荷用ウィンチドラム50aを回転させる回転力を発するように作動するとともに、その巻下側供給口8cに供給される圧油の流量に応じた回転数の回転力を出力する。
【0032】
また、吊荷用ウィンチ油圧モータ8は、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能である。具体的には、吊荷用ウィンチ油圧モータ8は、可変容量型であり、その容量が所定の容量にされることによって当該吊荷用ウィンチ油圧モータ8に圧油が供給されたときに動力を出力可能な動力出力状態となり、その容量が0にされることによって当該吊荷用ウィンチ油圧モータ8に圧油が供給されても動力を出力しない動力非出力状態となる。この吊荷用ウィンチ油圧モータ8の容量は、後述するコントローラ24によって制御される。
【0033】
吊荷用油圧ポンプ10は、吊荷用ウィンチ油圧モータ8を駆動するための圧油を吐出するものである。吊荷用油圧ポンプ10は、エンジン52が出力する動力を受けるように動力分割機構54を介してエンジン52と接続されている。また、動力分割機構54には、前記起伏用油圧モータを駆動するための圧油を吐出する起伏用油圧ポンプ16が接続されている。すなわち、エンジン52から出力される動力が動力分割機構54によって吊荷用油圧ポンプ10と起伏用油圧ポンプ16とに分配されるようになっており、吊荷用油圧ポンプ10と起伏用油圧ポンプ16は、その分配された動力によって作動し、圧油を吐出する。また、吊荷用油圧ポンプ10及び起伏用油圧ポンプ16は、共に可変容量型である。
【0034】
モーメントリミッタ12は、クレーンの転倒を防止するための吊荷のモーメントを演算する装置である。モーメントリミッタ12は、吊荷のモーメントを演算する過程で吊荷の重量を算出するため、本実施形態では、このモーメントリミッタ12が、算出した吊荷の重量に基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。具体的には、モーメントリミッタ12は、その算出した吊荷の重量と、トップシーブ及びフックシーブに掛け回される吊りロープの掛け数とに基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。トップシーブ及びフックシーブに掛け回される吊りロープの掛け数のデータは、オペレータ等がクレーンに設けられた図略の入力装置によって入力し、モーメントリミッタ12は、その入力された掛け数のデータを用いて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。例えば、トップシーブ及びフックシーブへの吊りロープの掛け数が4である場合に吊荷用ウィンチ50に掛かる吊りロープの張力は、吊りロープの掛け数が1である場合に吊荷用ウィンチ50に掛かる吊りロープの張力の1/4になる。モーメントリミッタ12は、このような関係に基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を導出する。そして、モーメントリミッタ12は、導出した吊りロープの張力のデータを後述するコントローラ24へ送る。なお、このモーメントリミッタ12は、本発明の張力導出装置の概念に含まれる。
【0035】
制御機構14は、操作レバー58aの操作に応じて吊荷用ウィンチ電動機2の動作と吊荷用ウィンチ油圧モータ8の動作を制御し、それによって、吊荷用ウィンチ50が操作レバー58aの操作に応じた吊りロープの巻き取り又は繰り出し(吊荷の巻き上げ又は巻き下げ)を行うように吊荷用ウィンチ50の動作を制御する。
【0036】
具体的には、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が予め設定された設定値よりも大きい場合には、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方に吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させ、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させず、吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させる。換言すれば、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力に関係なく、吊荷の昇降時には常に吊荷用ウィンチ電動機2を作動させてその吊荷用ウィンチ電動機2から吊荷用ウィンチ50へ動力を供給させ、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値を超えた場合、すなわち吊荷用ウィンチ50に高い負荷が掛かった場合にのみ吊荷用ウィンチ油圧モータ8を作動させてその吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させ、この吊荷用ウィンチ油圧モータ8の動力と吊荷用ウィンチ電動機2の動力の両方によって吊荷用ウィンチ50を作動させる。なお、前記設定値は、吊荷用ウィンチ電動機2の最大トルクに対応する張力よりも僅かに小さい値に設定されている。また、制御機構14は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きい場合には、吊荷用ウィンチ油圧モータ8を動力出力状態にさせることによって吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させ、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8を動力非出力状態にさせることによって吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させないようにする。
【0037】
また、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値よりも大きい場合には、吊荷用ウィンチ電動機2が出力するトルクが操作レバー58aの中立姿勢からの操作量に応じたトルクとなるように吊荷用ウィンチ電動機2の動作を制御する吊荷用ウィンチ電動機2のトルク制御を行うとともに、操作レバー58aの中立姿勢からの操作量に応じた流量の圧油を吊荷用ウィンチ油圧モータ8に供給して吊荷用ウィンチ油圧モータ8の回転数を制御することにより吊荷用ウィンチ50の回転数(吊荷用ウィンチドラム50aの回転数)を吊荷用ウィンチ油圧モータ8の回転数に応じた回転数とする。一方、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、吊荷用ウィンチ電動機2の回転数が操作レバー58aの中立姿勢からの操作量に応じた回転数となるように吊荷用ウィンチ電動機2の動作を制御する吊荷用ウィンチ電動機2の回転数制御を行うとともに吊荷用ウィンチ油圧モータ8が作動しないようにして吊荷用ウィンチ50の回転数(吊荷用ウィンチドラム50aの回転数)を吊荷用ウィンチ電動機2の回転数に応じた回転数にする。
【0038】
制御機構14は、制御弁22と、巻上側圧力センサ23aと、巻下側圧力センサ23bと、コントローラ24と、インバータ25と、コンバータ26とを備えている。
【0039】
制御弁22は、吊荷用油圧ポンプ10から吐出される圧油を流す方向を操作レバー58aの操作状態に応じて切り換えるための三位置切換弁である。制御弁22は、供給路27aを介して吊荷用油圧ポンプ10の圧油の吐出口と接続されており、この供給路27aを通じて吊荷用油圧ポンプ10から送られてくる圧油の流通方向を切り換える。なお、供給路27aには、制御弁22側から吊荷用油圧ポンプ10側への圧油の逆流を防止するための逆止弁29が設けられている。また、制御弁22は、巻上側油路27bを介して吊荷用ウィンチ油圧モータ8の巻上側供給口8bと接続され、巻下側油路27cを介して吊荷用ウィンチ油圧モータ8の巻下側供給口8cと接続されている。また、制御弁22は、圧油を貯留するタンクTと接続されている。制御弁22は、巻上側パイロット路28aを介して操作装置本体58bと接続された巻上側パイロットポート22aと、巻下側パイロット路28bを介して操作装置本体58bと接続された巻下側パイロットポート22bとを有する。巻上側パイロットポート22aには、操作レバー58aが中立姿勢から巻き上げ側に操作された場合に操作装置本体58bから巻上側パイロット路28aを通じてパイロット圧が供給され、巻下側パイロットポート22bには、操作レバー58aが中立姿勢から巻き下げ側に操作された場合に操作装置本体58bから巻下側パイロット路28bを通じてパイロット圧が供給される。
【0040】
また、制御弁22は、スプールが中立位置22c、巻上位置22d及び巻下位置22eの間で移動可能となるように構成されている。制御弁22は、操作レバー58aが中立姿勢にあって操作装置本体58bから両パイロットポート22a,22bにパイロット圧が供給されない状態では、スプールが中立位置22cに位置し、吊荷用油圧ポンプ10から吐出される圧油をタンクTへ流す。また、制御弁22は、操作レバー58aが巻き上げ側に操作されて操作装置本体58bから巻上側パイロットポート22aにパイロット圧が供給された場合には、それに応じてスプールが巻上位置22d側へ移動し、吊荷用油圧ポンプ10から吐出される圧油を巻上側パイロットポート22aに供給されるパイロット圧の大きさに応じた流量で巻上側油路27b及び油路27dを通じて吊荷用ウィンチ油圧モータ8の巻上側供給口8bへ流す。また、制御弁22は、操作レバー58aが巻き下げ側に操作されて操作装置本体58bから巻下側パイロットポート22bにパイロット圧が供給された場合には、それに応じてスプールが巻下位置22e側へ移動し、吊荷用油圧ポンプ10から吐出される圧油を巻下側パイロットポート22bに供給されるパイロット圧の大きさに応じた流量で巻下側油路27cを通じて吊荷用ウィンチ油圧モータ8の巻下側供給口8cへ流す。
【0041】
巻上側油路27bには、カウンタバランス弁30が設けられている。このカウンタバランス弁30は、巻下側油路27cを通じて吊荷用ウィンチ油圧モータ8に圧油が供給されて吊荷を巻き下げる方向に吊荷用ウィンチ油圧モータ8が作動するときに巻上側油路27bに背圧を発生させて吊荷の巻き下げに対するブレーキ力を吊荷用ウィンチ油圧モータ8に発生させる。また、巻上側油路27bには、油路27dがカウンタバランス弁30をバイパスするように接続されている。制御弁22から巻上側油路27bに圧油が流れるときには、その圧油は、油路27dを通じて吊荷用ウィンチ油圧モータ8の巻上側供給口8bへ流れる。なお、油路27dには、吊荷用ウィンチ油圧モータ8の巻上側供給口8b側から制御弁22側へ圧油が流れるのを防止する一方、制御弁22側から吊荷用ウィンチ油圧モータ8の巻上供給口8b側へ圧油が流れるのを許容するチェック弁27eが設けられている。
【0042】
巻上側圧力センサ23aは、巻上側パイロット路28aに接続されており、操作レバー58aが中立姿勢から巻き上げ側へ操作されることに応じて操作装置本体58bから巻上側パイロットポート22aへ供給されるパイロット圧を検出する。巻上側圧力センサ23aは、その検出したパイロット圧のデータをコントローラ24へ送る。
【0043】
巻下側圧力センサ23bは、巻下側パイロット路28bに接続されており、操作レバー58aが中立姿勢から巻き下げ側へ操作されることに応じて操作装置本体58bから巻下側パイロットポート22bへ供給されるパイロット圧を検出する。巻下側圧力センサ23bは、その検出したパイロット圧のデータをコントローラ24へ送る。
【0044】
コントローラ24は、吊荷用ウィンチ電動機2の出力軸2aの回転方向の制御と、吊荷用ウィンチ電動機2の回転数又は出力トルクの制御と、吊荷用ウィンチ油圧モータ8の容量の制御を行う。
【0045】
具体的には、コントローラ24は、吊荷用ウィンチ電動機2の動作制御については、インバータ25及びコンバータ26に制御信号を送ることによってインバータ25及びコンバータ26に吊荷用ウィンチ電動機2へ供給する電流の周波数を制御させ、それによってインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。そして、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値よりも大きい場合には、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られるパイロット圧のデータに基づいて、吊荷用ウィンチ電動機2の出力軸2aが操作レバー58aの中立姿勢からの操作方向に応じた方向に回転し且つ吊荷用ウィンチ電動機2の出力するトルクが操作レバー58aの操作量に応じたトルクになるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。すなわち、コントローラ24は、操作レバー58aが中立姿勢から巻き上げ側へ操作されて巻上側圧力センサ23aからパイロット圧のデータが送られると、吊荷用ウィンチドラム50aを吊荷の巻き上げ方向に回転させる回転方向に出力軸2aが回転し且つ吊荷用ウィンチ電動機2が巻上側圧力センサ23aが検出したパイロット圧の大きさに応じたトルクを出力するようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。
【0046】
また、コントローラ24は、操作レバー58aが中立姿勢から巻き下げ側へ操作されて巻下側圧力センサ23bからパイロット圧のデータが送られた場合には、出力軸2aの回転方向が逆になること以外は操作レバー58aが巻き上げ側へ操作された場合と同様にしてインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。また、コントローラ24は、この吊荷用ウィンチ50に掛かるロープ張力が前記設定よりも大きい場合には、吊荷用ウィンチ油圧モータ8の容量を予め設定された所定の容量にさせて当該吊荷用ウィンチ油圧モータ8を動力出力状態にさせる。これにより、操作レバー58aが操作されてその操作方向に応じた吊荷用ウィンチ油圧モータ8の供給口8b又は8cへ操作レバー58aの操作量に応じた流量の圧油が供給された場合に、吊荷用ウィンチ油圧モータ8が操作レバー58aの操作方向に応じた方向に作動し、且つ、その操作レバー58aの中立姿勢からの操作量に応じた回転数(回転速度)で作動できるようになる。
【0047】
また、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られるパイロット圧のデータに基づいて、吊荷用ウィンチ電動機2の出力軸2aが操作レバー58aの中立姿勢からの操作方向に応じた方向に回転し且つ吊荷用ウィンチ電動機2の回転数(回転速度)が操作レバー58aの操作量に応じた回転数になるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。この場合の吊荷用ウィンチ電動機2の動作制御は、吊荷用ウィンチ電動機2の出力トルクを制御する代わりに吊荷用ウィンチ電動機2の回転数を制御することを除いて、上記吊荷用ウィンチ50に掛かるロープ張力が設定値よりも大きい場合の吊荷用ウィンチ電動機2の動作制御と同様である。また、コントローラ24は、この吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8の容量を0にさせて当該吊荷用ウィンチ油圧モータ8を動力非出力状態にさせる。これにより、操作レバー58aが操作されて吊荷用ウィンチ油圧モータ8に圧油が供給されても吊荷用ウィンチ油圧モータ8は作動せず、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力が供給されない。
【0048】
また、コントローラ24は、アクセル装置本体56bから送られてくるアクセル信号が示すアクセルペダル56aの操作量に応じてエンジン52の回転数を制御する。なお、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きく、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8を両方とも作動させる時には、エンジン52の回転数をアクセルペダル56aの操作量に応じて制御する一方、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になり、吊荷用ウィンチ電動機2のみを作動させる場合には、エンジン52の回転数を低減させる。また、コントローラ24は、アクセル装置本体56bから送られてくるアクセル信号が示すアクセルペダル56aの操作量に応じて操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を調整する。具体的には、アクセルペダル56aの操作量が大きい場合には、操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を上昇させ、アクセルペダル56aの操作量が小さい場合には、操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を低下させる。
【0049】
次に、本発明の第1実施形態のウィンチ動作制御装置1による吊荷用ウィンチ50の動作制御のプロセスについて説明する。
【0050】
まず、モーメントリミッタ12が、吊荷用ウィンチ50に掛かる吊りロープの張力(ウィンチラインプル)を導出する(図2のステップS2)。
【0051】
次に、コントローラ24が、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が予め設定された前記設定値よりも大きいか否かを判断する(ステップS4)。ここで、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きいと判断した場合には、吊荷用ウィンチ電動機2のトルク制御を行う(ステップS6)。
【0052】
この吊荷用ウィンチ電動機2のトルク制御では、コントローラ24は、吊荷用ウィンチ電動機2に出力させるトルクの目標値を設定し、吊荷用ウィンチ電動機2が実際に出力するトルクがその設定したトルク目標値となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。この時、コントローラ24は、以下のようにしてトルク目標値を設定する。
【0053】
まず、吊荷を一定速度で巻き上げる時には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、吊荷用ウィンチ電動機2の負荷トルク(以下、電動機負荷トルクという)とバランスする力行方向トルクを求める。なお、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力に吊荷用ウィンチ50の有効半径(吊荷用ウィンチドラム50aのロープ巻取り半径)を乗じ、電動機側減速機50bの減速比で除することによって前記電動機負荷トルクを算出する。また、前記力行方向トルクは、吊荷用ウィンチ電動機2の回転方向に対して順方向のトルクである。
【0054】
また、吊荷の巻き上げの加速時には、加速方向への慣性力が作用するため、コントローラ24は、上記のように算出した電動機負荷トルクに慣性力に相当する力行方向トルクを加算することによってトルク目標値を求める。ここで、コントローラ24は、巻上側圧力センサ23aから送られてくるパイロット圧のデータに基づいて操作レバー58aが巻き上げ側へ急激に操作されたことを検知した場合には、電動機負荷トルクに加算する力行方向トルクを増加させてトルク目標値を求めてもよい。
【0055】
また、吊荷の巻き上げの減速時には、コントローラ24は、上記のように算出した電動機負荷トルクから減速方向の慣性力に相当するトルクを減算することによってトルク目標値を求める。このように求められたトルク目標値は、吊荷の巻き下げの減速時に吊荷用ウィンチ電動機2に電力を回生させるようなトルク目標値となり、吊荷用ウィンチ電動機2の出力トルクがこのトルク目標値となるようにコントローラ24がインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させることによって、吊荷用ウィンチ電動機2において当該吊荷用ウィンチ電動機2の運動エネルギが電力に回生される。
【0056】
また、吊荷を一定速度で巻き下げる時には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、吊荷用ウィンチ50に掛かるロープ張力とバランスする回生方向トルクを求める。この回生方向トルクは、吊荷用ウィンチ電動機2の回転方向に対して逆方向のトルクである。また、吊荷の巻き下げの減速時には、コントローラ24は、前記回生方向トルクに減速方向の慣性力に相当するトルクを加算することによってトルク目標値を求める。このように求められたトルク目標値は、吊荷を一定速度で巻き下げる時及び吊荷の巻き下げの減速時に吊荷用ウィンチ電動機2に電力を回生させるようなトルク目標値となり、吊荷用ウィンチ電動機2の出力トルクがこのトルク目標値となるようにコントローラ24がインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させることによって、吊荷用ウィンチ電動機2において吊荷の位置エネルギ又は吊荷用ウィンチ電動機2の運動エネルギが電力に回生される。
【0057】
また、吊荷の巻き下げの加速時には、コントローラ24は、前記回生方向トルクから加速方向の慣性力に相当するトルクを減算することによってトルク目標値を求める。なお、吊荷の巻き下げを急加速させたい場合には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、回生方向のトルクではなく、力行方向のトルクを求めてもよい。
【0058】
次に、操作レバー58aの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数制御が行われる(ステップS8)。具体的には、吊荷用ウィンチ油圧モータ8の回転数が操作レバー58aの中立姿勢からの操作量に応じた回転数となるように吊荷用ウィンチ油圧モータ8の動作が制御される。このとき、コントローラ24は、吊荷用ウィンチ油圧モータ8の容量を予め設定された所定の容量にさせる。この状態で、制御弁22の巻上側パイロットポート22a又は巻下側パイロットポート22bに操作装置本体58bから操作レバー58aの中立姿勢からの操作量に応じた大きさのパイロット圧が供給され、制御弁22が吊荷用油圧ポンプ10から吐出される圧油を当該制御弁22に供給されたパイロット圧の大きさに応じた流量で吊荷用ウィンチ油圧モータ8の巻上側供給口8b又は巻下側供給口8cへ供給すると、吊荷用ウィンチ油圧モータ8は、その供給された圧油の流量に応じた回転数で作動する。結果的に、吊荷用ウィンチ油圧モータ8は、操作レバー58aの中立姿勢からの操作量の増減に応じて回転数が増減するように駆動される。
【0059】
以上のように、吊荷用ウィンチ電動機2がトルク制御され、且つ、吊荷用ウィンチ油圧モータ8が操作レバー58aの操作量に応じた流量の圧油が供給されることによって駆動される場合には、吊荷用ウィンチ50の負荷トルクに対して吊荷用ウィンチ電動機2が出力するトルクが不足していると、吊荷用ウィンチ油圧モータ8に繋がる油圧回路(巻上側油路27b、巻下側油路27c及び制御弁22)内の圧油がこのトルクの不足分に応じて圧縮され、そのトルクの不足分に相当する保持圧が油圧回路内に発生する。その結果、自動的に、吊荷用ウィンチ電動機2の出力トルクと吊荷用ウィンチ油圧モータ8の出力トルクとの合計のトルク(吊荷用ウィンチ50を駆動するトルク)と、吊荷用ウィンチ50に掛かるロープ張力とのバランスが取れる。一方、吊荷用ウィンチドラム50aの回転速度は、吊荷用ウィンチ油圧モータ8の回転速度に従った速度に制御される。
【0060】
次に、コントローラ24は、アクセルペダル56aの操作量に応じたエンジン52の回転数制御を行う(ステップS10)。具体的には、コントローラ24は、図4中の実線で示すアクセルペダル56aの操作量とエンジン52の回転数との相関関係に従って、エンジン52の回転数がアクセルペダル56aの操作量に対応する回転数となるようにエンジン52を制御する。
【0061】
一方、上記ステップS4において、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくない、すなわち前記設定値以下であると判断した場合には、次に、吊荷用ウィンチ電動機2の速度制御(回転数制御)を行う(ステップS12)。具体的には、コントローラ24は、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られてくるパイロット圧のデータに基づいて操作レバー58aの中立姿勢からの操作量を検知し、吊荷用ウィンチ電動機2の回転数がこの検知した操作レバー58aの操作量に応じた回転数となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。この時、コントローラ24は、図3に示すような相関関係に基づいて、操作レバー58aの操作量とアクセルペダル56aの操作量とに応じた吊荷用ウィンチ電動機2の回転数目標値を求め、吊荷用ウィンチ電動機2の実際の回転数がこの求めた回転数目標値となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。なお、図3に示す相関関係は、アクセルペダル56aの操作量が増加するにつれて操作レバー58aの操作量の増減に対する回転数目標値の増減率が増大するような相関関係である。
【0062】
次に、吊荷用ウィンチ油圧モータ8が出力する動力が0になるように吊荷用ウィンチ油圧モータ8が制御される(ステップS14)。具体的には、コントローラ24は、吊荷用ウィンチ油圧モータ8の容量を0にさせ、操作レバー58aが操作されて吊荷用ウィンチ油圧モータ8に圧油が供給されたとしても、吊荷用ウィンチ油圧モータ8が作動しないようにする。この結果、吊荷用ウィンチ50は、吊荷用ウィンチ電動機2のみによって駆動される。なお、この時、コントローラ24は、吊荷用油圧ポンプ10の容量を最小にして吊荷用油圧ポンプ10の駆動に要する動力を最小にする。
【0063】
次に、コントローラ24は、他の油圧アクチュエータ、例えば起伏用油圧モータ等の複合操作が有るか否かを判断する(ステップS16)。コントローラ24は、他の油圧アクチュエータの複合操作があると判断した場合には、上記ステップS10のアクセルペダル56aの操作量に応じたエンジン52の回転数制御を実施する。
【0064】
一方、コントローラ24は、他の油圧アクチュエータの複合操作がないと判断した場合には、エンジン52の回転数の低減制御を行う(ステップS18)。この時、コントローラ24は、図4の破線で示すように、アクセルペダル56aの操作量に関わらず、エンジン52の回転数が一定の低い回転数となるようにエンジン52の駆動を制御する。
【0065】
そして、この第1実施形態によるウィンチ動作制御装置1では、以上のような一連の制御ステップを繰り返し実施する。
【0066】
この第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値よりも大きくなった場合、すなわち、吊荷用ウィンチ50に高負荷が掛かったときには、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給されるため、吊荷用ウィンチ50に高トルクを付与することができる。一方、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下になった場合、すなわち、吊荷用ウィンチ50に低負荷しか掛かっていないときには、油圧モータに比べて駆動効率の良い吊荷用ウィンチ電動機2のみによって吊荷用ウィンチ50を駆動するため、吊荷用ウィンチ50の駆動効率を向上することができる。そして、この第1実施形態では、吊荷用ウィンチ50に高負荷が掛かったときには、吊荷用ウィンチ50を駆動するための動力を吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8とで分担するため、吊荷用ウィンチ電動機2単体又は吊荷用ウィンチ油圧モータ8単体で吊荷用ウィンチ50を駆動する場合に比べて、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8のそれぞれに要求されるトルクは小さくなる。また、この第1実施形態では、吊荷用ウィンチ50に低負荷しか掛かっていないときには、吊荷用ウィンチ電動機2のみによって吊荷用ウィンチ50を駆動するが、このときの吊荷用ウィンチ50の駆動に必要とされるトルクは小さい。従って、この第1実施形態では、吊荷用ウィンチ電動機2及び吊荷用ウィンチ油圧モータ8の大型化を防ぐことができる。
【0067】
さらに、この第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値よりも大きい場合及び設定値以下である場合のいずれの場合も、吊荷用ウィンチ電動機2は、吊荷用ウィンチ50に動力を供給して吊荷用ウィンチ50を作動させるため、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下から設定値よりも大きくなるとき又は設定値よりも大きい状態から設定値以下へ低下するとき、すなわち、吊荷用ウィンチ50に掛かる負荷が低負荷から高負荷へ又は高負荷から低負荷へ変化するときに、少なくとも吊荷用ウィンチ電動機2からのトルクは常に吊荷用ウィンチ50に付与されている。このため、吊荷の昇降時に吊荷用ウィンチ50に与えられるトルクに抜けが生じるのを防ぐことができる。このため、接地状態の吊荷の地切り作業を行うときに吊荷が地面から離れて吊荷の全荷重が吊りロープを介して吊荷用ウィンチ50に掛かり、その結果、吊荷に掛かる負荷が低負荷から高負荷となる場合でも、吊荷用ウィンチ50に与えられるトルクに抜けが生じるのを防いで、吊荷の吊り上げ速度が不連続になったり、吊荷にショックが与えられて吊荷が外れたりするのを防ぐことができる。
【0068】
また、第1実施形態では、モーメントリミッタ12によって導出される吊荷用ウィンチ50に掛かるロープ張力が設定値よりも大きくなって吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、吊荷用ウィンチ50の回転数が、操作レバー58aの中立姿勢からの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数によって制御されるため、吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御とが干渉するのを防ぐことができる。仮に、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に吊荷用ウィンチ電動機2の回転数と吊荷用ウィンチ油圧モータ8の回転数の両方を制御することによって吊荷用ウィンチ50の回転数を制御しようとすると、吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御とが互いに干渉して吊荷用ウィンチ50の回転数を有効に制御できない場合がある。また、この場合には、吊荷用ウィンチ油圧モータ8に繋がる油圧回路(巻上側油路27b、巻下側油路27c及び制御弁22)においてキャビテーションが生じる虞がある。これに対して、この第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に吊荷用ウィンチ油圧モータ8の回転数に応じて吊荷用ウィンチ50の回転数が制御されるので、上記のような吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御との干渉が生じるのを防ぐことができ、吊荷用ウィンチ50の回転数を有効に制御することができるとともに吊荷用ウィンチ油圧モータ8にキャビテーションが生じるのを防ぐことができる。
【0069】
また、第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、吊荷用ウィンチ電動機2のトルクが操作レバー58aの中立姿勢からの操作量に応じたトルクとなるように吊荷用ウィンチ電動機2の動作が制御されるため、吊荷用ウィンチ電動機2に不必要な過剰なトルクを出力させるのを防ぐことができる。従って、この第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、トルクのロスを削減しつつ、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両者で協調して吊荷用ウィンチ50の回転数及び駆動トルクを操作レバー58aの中立姿勢からの操作量に応じた値に制御することができる。
【0070】
また、第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下となって吊荷用ウィンチ電動機2のみから吊荷用ウィンチ50へ動力が供給される時には、吊荷用ウィンチ油圧モータ8は作動せず、操作レバー58aの中立姿勢からの操作量に応じた吊荷用ウィンチ電動機2の回転数に従って吊荷用ウィンチ50の回転数が制御されるため、この時も、吊荷用ウィンチ50の回転数を操作レバー58aの操作量に応じた回転数に制御することができる。
【0071】
また、第1実施形態では、バッテリ6が、吊荷用ウィンチ50の回転速度が低下する時又は吊荷用ウィンチ50が吊荷を巻き下げる時には吊荷用ウィンチ電動機2によって回生された電力を蓄え、吊荷用ウィンチ50の回転速度が上昇する時又は吊荷用ウィンチ50が吊荷を巻き上げる時には蓄えた電力を吊荷用ウィンチ電動機2へ供給するため、吊荷用ウィンチ50の回転速度の低下時や吊荷用ウィンチ50が吊荷を巻き下げる時に得られる運動エネルギや位置エネルギを電力として回生し、その電力を用いて、吊荷用ウィンチ50の回転速度の上昇時や吊荷用ウィンチ50が吊荷を巻き上げる時に吊荷用ウィンチ電動機2に吊荷用ウィンチ50を駆動させることができる。このため、省エネルギ効果を得ることができる。
【0072】
また、第1実施形態では、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が設定値以下である場合には、吊荷用ウィンチ油圧モータ8の容量を0にして当該吊荷用ウィンチ油圧モータ8を動力非出力状態にさせるため、例えば吊荷用ウィンチ50に掛かるロープ張力の大きさに関わらず常に吊荷用ウィンチ油圧モータ8に動力を出力させるような構成に比べて、吊荷用ウィンチ油圧モータ8を駆動するための圧油の供給に要する吊荷用油圧ポンプ10の動力を削減することができる。このため、省エネルギ効果を向上することができる。
【0073】
また、第1実施形態では、吊荷用ウィンチ50を吊荷用ウィンチ電動機2のみによって駆動するときには、エンジン52の回転数の低減制御を行うため、エンジン52の燃料消費量を削減することができ、省エネルギ効果を高めることができる。
【0074】
(第2実施形態)
次に、図5を参照して、本発明の第2実施形態によるクレーンのウィンチ動作制御装置1について説明する。
【0075】
この第2実施形態では、エンジンの動力によって吊荷用油圧ポンプ10及び起伏用油圧ポンプ16を駆動せず、電動機によって吊荷用油圧ポンプ10及び起伏用油圧ポンプ16を駆動する点で上記第1実施形態と異なる。
【0076】
具体的には、この第2実施形態では、クレーンに吊荷用油圧ポンプ駆動用電動機31と、起伏用油圧ポンプ駆動用電動機32と、吊荷用油圧ポンプ側インバータ34と、起伏用油圧ポンプ側インバータ36とが設けられている。吊荷用油圧ポンプ駆動用電動機31の動力の出力軸31aは、吊荷用油圧ポンプ10と接続されており、吊荷用油圧ポンプ駆動用電動機31は、その出力軸31aを通じて吊荷用油圧ポンプ10へ動力を供給し、吊荷用油圧ポンプ10を作動させる。また、起伏用油圧ポンプ駆動用電動機32の動力の出力軸32aは、起伏用油圧ポンプ16と接続されており、起伏用油圧ポンプ駆動用電動機32は、その出力軸32aを通じて起伏用油圧ポンプ16へ動力を供給し、起伏用油圧ポンプ16を作動させる。
【0077】
また、この第2実施形態では、吊荷用ウィンチ電動機2は、インバータ25を介してバッテリの代わりに外部電源と電気的に接続されている。また、この第2実施形態では、クレーンに発電機及びコンバータが設けられていない。この第2実施形態では、コントローラ24は、外部電源から吊荷用ウィンチ電動機2へ供給される電流の周波数をインバータ25に制御させることによって吊荷用ウィンチ電動機2の回転方向制御、トルク制御及び速度制御(回転数制御)を行う。また、吊荷用油圧ポンプ駆動用電動機31は、吊荷用油圧ポンプ側インバータ34を介して外部電源と電気的に接続されており、起伏用油圧ポンプ駆動用電動機32は、起伏用油圧ポンプ側インバータ36を介して外部電源と電気的に接続されている。コントローラ24は、外部電源から吊荷用油圧ポンプ駆動用電動機31へ供給される電流の周波数を吊荷用油圧ポンプ側インバータ34に制御させることによって吊荷用油圧ポンプ駆動用電動機31の回転数を制御できるようになっている。また、コントローラ24は、外部電源から起伏用油圧ポンプ駆動用電動機32へ供給される電流の周波数を起伏用油圧ポンプ側インバータ36に制御させることによって起伏用油圧ポンプ駆動用電動機32の回転数を制御できるようになっている。
【0078】
この第2実施形態におけるクレーンの上記以外の構成は、上記第1実施形態におけるクレーンの構成と同様であり、当該第2実施形態のクレーンに適用されるウィンチ動作制御装置1の構成は、上記第1実施形態のウィンチ動作制御装置1の構成と同様である。
【0079】
(第3実施形態)
次に、図6を参照して、本発明の第3実施形態によるウィンチ動作制御装置1について説明する。
【0080】
この第3実施形態によるウィンチ動作制御装置1は、クラッチ40によって吊荷用ウィンチ油圧モータ8の動力の出力軸8aと吊荷用ウィンチ50の動力の入力軸50dとを接続する状態と切り離す状態とに切り換えるように構成されている点で上記第1実施形態によるウィンチ動作制御装置1と異なる。
【0081】
具体的には、この第3実施形態によるウィンチ動作制御装置1は、吊荷用ウィンチ油圧モータ8の動力の出力軸8aと吊荷用ウィンチ50の油圧モータ側減速機50cの動力の入力軸50dとの間に設けられたクラッチ40を備えている。なお、入力軸50dは、本発明の油圧モータから出力される動力が入力されるウィンチの入力軸の概念に含まれるものである。クラッチ40は、吊荷用ウィンチ油圧モータ8の出力軸8aと吊荷用ウィンチ50の入力軸50dとが一体的に回転するようにその出力軸8aと入力軸50dを互いに連結する接続状態と、吊荷用ウィンチ油圧モータ8の出力軸8aに対して吊荷用ウィンチ50の入力軸50dが相対的に回転可能となるようにその出力軸8aと入力軸50dとを切り離す切断状態とに切り換わるように構成されている。
【0082】
制御機構14のコントローラ24は、クラッチ40を接続状態と切断状態とに切換制御する。具体的には、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくなって吊荷用ウィンチ油圧モータ8を動力出力状態にするときには、クラッチ40が接続状態になるように指示する制御信号をクラッチ40へ送り、それによって、クラッチ40を接続状態にさせる。一方、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になって吊荷用ウィンチ油圧モータ8を動力非出力状態にするときには、クラッチ40が切断状態になるように指示する制御信号をクラッチ40へ送り、それによって、クラッチ40を切断状態にさせる。
【0083】
この第3実施形態によるクレーン及びウィンチ動作制御装置1の上記以外の構成は、上記第1実施形態によるクレーン及びウィンチ動作制御装置1の構成と同様である。
【0084】
次に、図7を参照して、この第3実施形態のウィンチ動作制御装置1による吊荷用ウィンチ50の動作制御のプロセスについて説明する。
【0085】
この第3実施形態における吊荷用ウィンチ50の動作制御では、上記第1実施形態におけるステップS2、S4、S6、S8、S10、S12、S14、S16及びS18のプロセスと同様のステップS22、S24、S26、S28、S30、S32、S34、S36及びS38のプロセスを実施する。ただし、この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくなり、吊荷用ウィンチ電動機2のトルク制御が行われた(ステップS26)後、コントローラ24がクラッチ40を接続状態にさせ(ステップS27)、その後、操作レバー58aの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数制御が行われる(ステップS28)。また、この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になり、吊荷用ウィンチ電動機2の速度制御が行われた(ステップS32)後、コントローラ24がクラッチ40を切断状態にさせ(ステップS33)、その後、吊荷用ウィンチ油圧モータ8が出力する動力を0にする制御が行われる(ステップS34)。
【0086】
この第3実施形態による吊荷用ウィンチ50の動作制御プロセスの上記以外の構成は、上記第1実施形態による吊荷用ウィンチ50の動作制御プロセスと同様である。
【0087】
この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になって吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50を駆動させる場合に、クラッチ40を切断状態として吊荷用ウィンチ油圧モータ8と吊荷用ウィンチ50との間の動力の伝達を遮断する。このため、吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50を駆動させるときに吊荷用ウィンチ油圧モータ8の空転に起因する負荷が吊荷用ウィンチ電動機2に掛かるのを防ぐことができる。その結果、吊荷用ウィンチ電動機2の駆動効率を向上させることができ、省エネルギ効果を向上することができる。
【0088】
この第3実施形態のウィンチ動作制御装置1による上記以外の効果は、上記第1実施形態のウィンチ動作制御装置1による効果と同様である。
【0089】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれる。
【0090】
例えば、上記第3実施形態において、吊荷用ウィンチ油圧モータ8と吊荷用ウィンチ50との間の動力の伝達経路に設けたクラッチ40をワンウェイクラッチにして、コントローラ24によるクラッチの接続/切断の切り換え制御を行うことなく、吊荷用ウィンチ油圧モータ8からの動力の出力の有無に応じて自動的にクラッチの接続/切断が切り換わるようにしてもよい。この構成では、ワンウェイクラッチは、吊荷用ウィンチ油圧モータ8が動力出力状態になってその出力軸8aが回転するときには、その出力軸8aと吊荷用ウィンチ50の油圧モータ側減速機50cの入力軸50dとが一体的に回転するようにその出力軸8aと入力軸50dを互いに連結する接続状態になり、吊荷用ウィンチ油圧モータ8の動力を油圧モータ側減速機50cへ伝達する。一方、ワンウェイクラッチは、吊荷用ウィンチ油圧モータ8が動力非出力状態になってその出力軸8aが回転しないときには、その出力軸8aに対して吊荷用ウィンチ50の油圧モータ側減速機50cの入力軸50dが相対的に回転可能となるようにその出力軸8aと入力軸50dとを切り離す切断状態になる。
【0091】
この構成によれば、吊荷用ウィンチ油圧モータ8が動力非出力状態から動力出力状態になってその吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始するときにワンウェイクラッチが自動的に切断状態から接続状態に切り換わる。仮に、吊荷用ウィンチ油圧モータ8の動作制御と並行してコントローラ24がクラッチ40の切断/接続の切り換え制御を行う場合には、クラッチ40が接続状態にされるタイミングが吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始するタイミングよりも僅かに遅くなる場合があり、この場合には、吊荷用ウィンチ油圧モータ8の出力軸8aと油圧モータ側減速機50cの入力軸50dとの間で回転数差が大きくなり、その結果、クラッチ40の接続時にショックが発生する。これに対して、本構成では、吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始すると自動的にワンウェイクラッチが接続状態となるので、そのようなタイミングのずれが生じず、クラッチが接続状態に切り換わるときに発生するショックを抑制できる。
【0092】
また、上記実施形態では、吊荷用ウィンチ電動機と吊荷用ウィンチ油圧モータの両方から吊荷用ウィンチへ動力を供給する場合に吊荷用ウィンチ電動機をトルク制御したが、その代わりに、吊荷用ウィンチ電動機が一定のトルクを出力するように吊荷用ウィンチ電動機の動作を制御してもよい。
【0093】
また、上記実施形態では、モーメントリミッタが吊荷用ウィンチに掛かるロープ張力を導出するようにしたが、それ以外の手段で吊荷用ウィンチに掛かるロープ張力を求めるようにしてもよい。例えば、フック装置に設けたロードセルによって吊荷の重量を検出し、そのロードセルによって検出された吊荷の重量と予め入力された吊りロープのトップシーブとフックシーブとの間の掛け数の情報とからコントローラが吊荷用ウィンチに掛かるロープ張力を算出するようにしてもよい。
【0094】
また、上記バッテリ10の代わりに、キャパシタを蓄電装置として用いてもよい。
【0095】
また、クレーンは、下部本体と、その下部本体上に旋回自在となるように搭載された上部旋回体とを備えていて、その上部旋回体を旋回させるための旋回用油圧モータが他の油圧アクチュエータとして設けられていてもよい。この場合には、旋回用油圧モータに圧油を供給する旋回用油圧ポンプが、エンジンの動力を分配する動力分割機構に接続されていてその動力分割機構によって分配されたエンジンの動力によって作動するようになっていてもよい。また、旋回用油圧モータの代わりに、上部旋回体を旋回させるための旋回用電動機が設けられていてもよい。
【0096】
また、操作レバーの操作量に応じた吊荷用ウィンチ油圧モータの回転数制御を行う場合には、吊荷用ウィンチ油圧モータへ供給される圧油の流量の増減に応じて、コントローラが吊荷用油圧ポンプの容量を増減させてもよい。この場合には、吊荷用ウィンチに掛かる吊荷の負荷が小さい場合に吊荷用ウィンチ油圧モータの容量が減少するため、吊荷の負荷が大きい場合よりも吊荷用ウィンチ油圧モータの回転数が増加するように当該油圧モータの動作が制御される。
【0097】
また、吊荷を一定速度で巻き上げる時及び吊荷の巻き上げの加速時には、コントローラは、吊荷用ウィンチ電動機をトルク制御するための目標トルクを吊荷用ウィンチ電動機の力行方向の最大トルクに等しいトルクに設定してもよい。
【0098】
また、吊荷を一定速度で巻き下げる時及び吊荷の巻き上げの減速時には、コントローラは、吊荷用ウィンチ電動機をトルク制御するための目標トルクを吊荷用ウィンチ電動機の回生方向の最大トルクに等しいトルクに設定してもよい。
【0099】
また、上記第3実施形態において、モーメントリミッタによって導出された吊荷用ウィンチに掛かるロープ張力が前記設定値以下である場合には、コントローラは、吊荷用ウィンチ油圧モータを動力非出力状態にすることなく、具体的には、吊荷用の容量を0にすることなく、クラッチを切断状態にさせることによって吊荷用ウィンチ油圧モータから吊荷用ウィンチへ動力を供給させないようにしてもよい。
【0100】
また、上記各構成において、吊荷用ウィンチ油圧モータの容量を0にすることによって吊荷用ウィンチ油圧モータを動力非出力状態にしたが、これ以外の方法によって吊荷用ウィンチ油圧モータを動力非出力状態にしてもよい。例えば、吊荷用油圧ポンプが吐出する圧油を制御弁にタンクへ流させて吊荷用ウィンチ油圧モータへ圧油が供給されないようにして吊荷用ウィンチ油圧モータを動力非出力状態にしてもよい。この場合には、巻上側油路と巻下側油路が制御弁内で連通するように制御弁を構成するか又は制御弁の外部で巻上側油路と巻下側油路を連通させる連通手段を設けてもよい。
【0101】
また、上記バッテリ又は上記外部電源の代わりに、大容量バッテリもしくは燃料電池を用いてもよい。
【0102】
また、制御機構は、張力導出装置によって導出されたロープの張力が予め設定された設定値よりも大きい場合において、電動機が出力するトルクが操作レバーの操作量に応じたトルクとなるように電動機を制御する代わりに、電動機が一定のトルクを出力するようにその電動機を制御してもよく、また、電動機がエンジンの回転数に応じた大きさのトルクを出力するようにその電動機を制御してもよい。
【0103】
また、上記各実施形態では、吊荷用ウィンチの動作を制御するためのウィンチ動作制御装置に本発明を適用した例について説明したが、本発明はこのような適用例に限定されない。例えば、起伏部材を起伏させるための起伏用ウィンチの動作を制御するためのウィンチ動作制御装置に本発明を適用することが可能である。起伏部材としては、例えば、クレーンの本体(上部旋回体)に起伏自在となるように設けられたブームや、ブームの先端に起伏自在となるように設けられたジブ等が該当する。クレーンの本体には、ブームを後方から支持しながら起伏させるための起伏用ロープの巻き取り及び繰り出しを行うブーム起伏用ウィンチが設けられている。また、ブームの先端にジブが設けられている場合には、ジブを後方から支持しながら起伏させるための起伏用ロープの巻き取り及び繰り出しを行うジブ起伏用ウィンチがクレーンの本体に設けられている。そして、このような構成において、ブーム起伏用ウィンチの動作を制御するためのウィンチ動作制御装置及びジブ起伏用ウィンチの動作を制御するためのウィンチ動作制御装置がクレーンの本体に設けられ、それらのウィンチ動作制御装置の少なくとも一方に本発明を適用してもよい。すなわち、このようなウィンチ動作制御装置として、上記実施形態または上記変形例に係るウィンチ動作制御装置と実質的に同様の構成の制御装置を適用してもよい。具体的には、上記実施形態及び上記変形例における吊荷用ウィンチを起伏用ウィンチとし、吊りロープを起伏用ロープとし、吊荷用ウィンチ電動機及び吊荷用ウィンチ油圧モータを起伏用ウィンチを駆動するための動力を出力する起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータとすればよい。また、この場合には、上記吊荷の巻き上げを起伏部材を起立させる方向への当該起立部材の巻き上げと読み替え、上記吊荷の巻き下げを起伏部材を倒伏させる方向への当該起立部材の巻き下げと読み替えるものとする。
【0104】
この構成によれば、上記実施形態と同様の理由で、起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータを大型化することなく、起伏用ウィンチに高負荷が掛かるときにその起伏用ウィンチに高トルクを付与することができる。さらに、この構成によれば、上記実施形態と同様の理由で、起伏用ウィンチに掛かる負荷が低負荷から高負荷へ変化するときに、少なくとも起伏用ウィンチ電動機からのトルクは常に起伏用ウィンチに付与されるため、起伏部材の起伏時に起伏用ウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。このため、先端が地面に当接した状態の起伏部材を地面から離れるように起立させるときに起伏用ウィンチに掛かる負荷が低負荷から高負荷となる場合でも、起伏用ウィンチに与えられるトルクに抜けが生じるのを防いで、起伏部材の起立速度が不連続になったり、起伏部材にショックが与えられたりするのを防ぐことができる。
【0105】
当該構成における上記以外の作用効果は、上記実施形態及び変形例で説明した作用効果における吊荷用ウィンチ、吊りロープ、吊荷用ウィンチ電動機及び吊荷用ウィンチ油圧モータを起伏用ウィンチ、起伏用ロープ、起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータに置き換えた作用効果と同様である。
【符号の説明】
【0106】
1 ウィンチ動作制御装置
2 吊荷用ウィンチ電動機(電動機)
8 吊荷用ウィンチ油圧モータ(油圧モータ)
8a 出力軸
10 バッテリ(蓄電装置)
12 モーメントリミッタ(張力導出装置)
14 制御機構
24 コントローラ
40 クラッチ
50 吊荷用ウィンチ(ウィンチ)
50d 入力軸
58a 操作レバー
【技術分野】
【0001】
本発明は、クレーンのウィンチ動作制御装置に関するものである。
【背景技術】
【0002】
従来、クレーンでは、ブーム等の起伏部材の先端から吊りロープを介して吊荷を吊り下げ、その吊りロープをウィンチによって巻き取り及び繰り出すことによって吊荷を昇降させる。下記特許文献1には、この吊荷を昇降させるウィンチを駆動し且つそのウィンチの動作を制御するための技術が開示されている。下記特許文献1に開示されている技術では、ウィンチに掛かる吊りロープの巻上げ負荷の大きさに応じて電動機がウィンチを駆動するか又は油圧モータがウィンチを駆動するかをクラッチで切り換えるようになっている。具体的には、下記特許文献1では、電動機と油圧モータの両方からウィンチに動力を供給可能となっており、電動機とウィンチとの間の動力の伝達経路と油圧モータとウィンチとの間の動力の伝達経路とにそれぞれクラッチが設けられている。そして、ウィンチに高負荷が掛かる場合には、電動機側のクラッチを切断状態にするとともに油圧モータ側のクラッチを連結状態にして油圧モータにウィンチを駆動させ、ウィンチに低負荷しか掛からない場合には、電動機側のクラッチを連結状態にするとともに油圧モータ側のクラッチを切断状態にして電動機にウィンチを駆動させる。この技術によれば、ウィンチに低負荷しか掛からない場合に電動機がウィンチを駆動するため、電動機に高トルクが必要とされず、電動機の大型化を防ぐことが可能である。また、電動機は、油圧モータに比べて駆動効率が高いため、この技術によれば、常に油圧モータのみがウィンチを駆動するような構成に比べてウィンチの駆動効率を向上することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−276989号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に記載の技術では、ウィンチに高負荷が掛かるときには、油圧モータが単独でウィンチを駆動することになるため、油圧モータに高トルクが必要とされ、その結果、油圧モータを大型化せざるを得なくなる。また、上記特許文献1に記載の技術では、ウィンチに掛かる負荷が低負荷と高負荷との間のしきい値に達したときに、ウィンチに与えられるトルクに抜けが生じる虞がある。例えば、接地状態の吊荷を吊り上げるいわゆる地切り作業を行う場合には、最初は吊りロープがたるんでいてウィンチに吊荷の荷重が作用していないためウィンチに掛かる負荷は低いが、ウィンチが吊りロープを巻き取って吊荷の荷重がウィンチに作用するとウィンチに掛かる負荷が増加し、その後、吊荷が地面を離れると吊荷の全荷重がウィンチに作用してウィンチに高負荷が掛かる。この際、ウィンチに掛かる負荷が低負荷からしきい値に達して高負荷になった瞬間に電動機側のクラッチの連結状態から切断状態への切り換えと油圧モータ側のクラッチの切断状態から連結状態への切り換えが同時に行われるため、電動機と油圧モータの両方からウィンチにトルクが供給されない状態、すなわちトルクの抜けが一時的に生じる。この場合には、吊荷の吊り上げ速度が不連続になったり、吊荷にショックが与えられて吊荷が外れたりする虞がある。
【0005】
また、上記の吊荷の昇降用のウィンチに係る問題と同様の問題が、起伏部材の起伏用のウィンチでも生じる虞がある。具体的には、例えば、起伏部材が前方に倒伏されていてその起伏部材の先端が地面に当接しており、当該起伏部材を後方から支持する起伏用のロープがたるんでいる状態では、その起伏用のロープの巻き取り及び繰り出しを行って起伏部材を起伏させる起伏用のウィンチに掛かる負荷は小さいが、そのウィンチが起伏用のロープを巻き取って起伏部材の荷重がウィンチに作用するとウィンチに掛かる負荷が増加し、その後、起伏部材の先端が地面から離れると起伏用ロープを介して起伏用ウィンチに掛かる荷重が急増し、その結果、起伏用ウィンチに高負荷が掛かる。この際、上記の吊荷の昇降用のウィンチの場合と同様に、起伏用ウィンチに与えられるトルクに抜けが生じる虞がある。
【0006】
この発明は、上記の課題を解決するためになされたものであり、その目的は、電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにウィンチに高トルクを付与することが可能であり、且つ、ウィンチに与えられるトルクに抜けが生じるのを防ぐことが可能なクレーンのウィンチ動作制御装置を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明によるクレーンのウィンチ動作制御装置は、吊荷を吊るロープの巻き取り及び繰り出しを行ってその吊荷を昇降させるウィンチを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方に前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみに前記ウィンチへ動力を供給させて前記ウィンチを作動させる(請求項1)。
【0008】
また、本発明によるクレーンのウィンチ動作制御装置は、起伏自在となるように設けられた起伏部材と、その起伏部材を後方から支持しながら起伏させるためのロープの巻き取り及び繰り出しを行うウィンチとを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方に前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみに前記ウィンチへ動力を供給させて前記ウィンチを作動させる(請求項2)。
【0009】
上記各クレーンのウィンチ動作制御装置では、ウィンチに掛かるロープの張力が設定値よりも大きくなった場合、すなわち、ウィンチに高負荷が掛かったときには、電動機と油圧モータの両方からウィンチへ動力を供給するため、ウィンチに高トルクを付与することができる。一方、ウィンチに掛かるロープの張力が設定値以下になった場合、すなわち、ウィンチに低負荷しか掛かっていないときには、油圧モータに比べて駆動効率の良い電動機のみによってウィンチを駆動するため、ウィンチの駆動効率を向上することができる。そして、このウィンチ動作制御装置では、ウィンチに高負荷が掛かったときには、ウィンチを駆動するための動力を電動機と油圧モータとで分担するため、電動機単体又は油圧モータ単体でウィンチを駆動する場合に比べて、電動機と油圧モータのそれぞれに要求されるトルクは小さくなる。また、ウィンチに低負荷しか掛かっていないときには、電動機のみによってウィンチを駆動するが、このときのウィンチの駆動に必要とされるトルクは小さい。従って、このウィンチ動作制御装置では、電動機及び油圧モータの大型化を防ぐことができる。さらに、このウィンチ動作制御装置では、ウィンチに掛かるロープの張力が設定値よりも大きい場合及び設定値以下である場合のいずれの場合も、電動機は、ウィンチに動力を供給してウィンチを作動させるため、ウィンチに掛かるロープの張力が設定値以下から設定値よりも大きくなるとき又は設定値よりも大きい状態から設定値以下へ低下するとき、すなわち、ウィンチに掛かる負荷が低負荷から高負荷へ又は高負荷から低負荷へ変化するときに、少なくとも電動機からのトルクは常にウィンチに付与されている。このため、吊荷を昇降させるウィンチでは、吊荷の昇降時にそのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。また、起伏部材を起伏させるためのウィンチでは、起伏部材の起伏時にそのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。
【0010】
上記クレーンのウィンチ動作制御装置において、前記クレーンには、前記ウィンチを操作するための操作レバーが設けられ、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記電動機が出力するトルクが前記操作レバーの操作量に応じたトルクとなるように前記電動機の動作を制御するとともに、前記操作レバーの操作量に応じた流量の圧油を前記油圧モータに供給して前記油圧モータの回転数を制御することによって前記ウィンチの回転数を当該油圧モータの回転数に応じた回転数とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記電動機の回転数が前記操作レバーの操作量に応じた回転数となるように前記電動機の動作を制御するとともに前記油圧モータが作動しないようにして前記ウィンチの回転数を前記電動機の回転数に応じた回転数にすることが好ましい(請求項3)。
【0011】
この構成によれば、ウィンチに掛かるロープの張力が設定値よりも大きくなって電動機と油圧モータの両方からウィンチへ動力を供給する時に、ウィンチの回転数は、操作レバーの操作量に応じた油圧モータの回転数によって制御されるため、電動機の回転数制御と油圧モータの回転数制御とが干渉するのを防ぐことができる。仮に、電動機と油圧モータの両方からウィンチへ動力を供給する時に電動機の回転数と油圧モータの回転数の両方を制御することによってウィンチの回転数を制御しようとすると、電動機の回転数制御と油圧モータの回転数制御とが互いに干渉してウィンチの回転数を有効に制御できない場合がある。これに対して、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に油圧モータの回転数に応じてウィンチの回転数が制御されるので、上記のような電動機の回転数制御と油圧モータの回転数制御との干渉が生じるのを防ぐことができ、ウィンチの回転数を有効に制御することができる。さらに、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に、電動機のトルクが操作レバーの操作量に応じたトルクとなるように電動機の動作を制御するため、電動機に不必要な過剰なトルクを出力させるのを防ぐことができる。従って、本構成では、電動機と油圧モータの両方からウィンチへ動力を供給する時に、トルクのロスを削減しつつ、電動機と油圧モータの両者で協調してウィンチの回転数及び駆動トルクを操作レバーの操作量に応じた値に制御することができる。また、本構成では、ウィンチに掛かるロープの張力が設定値以下となって電動機のみからウィンチへ動力を供給する時には、油圧モータは作動せず、操作レバーの操作量に応じた電動機の回転数に従ってウィンチの回転数が制御されるため、この時も、ウィンチの回転数を操作レバーの操作量に応じた回転数に制御することができる。
【0012】
上記クレーンのウィンチ動作制御装置において、前記電動機に電気的に接続され、前記ウィンチの回転速度が低下する時又は前記ウィンチが前記ロープを繰り出す時には前記電動機によって回生された電力を蓄え、前記ウィンチの回転速度を上昇させる時又は前記ウィンチが前記ロープを巻き取る時には蓄えた電力を前記電動機へ供給する蓄電装置をさらに備えていることが好ましい(請求項4)。
【0013】
この構成によれば、吊荷を昇降させるウィンチでは、当該ウィンチの回転速度の低下時や当該ウィンチが吊荷を降下させる時に得られる運動エネルギや位置エネルギを電力として回生し、その電力を用いて、当該ウィンチの回転速度の上昇時や当該ウィンチが吊荷を上昇させる時に電動機に当該ウィンチを駆動させることができる。また、起伏部材を起伏させるためのウィンチでは、当該ウィンチの回転速度の低下時や当該ウィンチが起伏部材を前方へ倒伏させるように巻き下げる時に得られる運動エネルギ及び位置エネルギを電力として回生し、その電力を用いて、当該ウィンチの回転速度の上昇時や当該ウィンチが起伏部材を起立させるように巻き上げる時に電動機に当該ウィンチを駆動させることができる。従って、吊荷を昇降させるウィンチ及び起伏部材を起伏させるウィンチのいずれに関しても、省エネルギ効果を得ることができる。
【0014】
上記クレーンのウィンチ動作制御装置において、前記油圧モータは、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能であり、前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータを前記動力出力状態にさせ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータを前記動力非出力状態にさせることが好ましい(請求項5)。
【0015】
この構成によれば、張力導出装置によって導出されたウィンチに掛かるロープの張力が設定値以下である場合には、油圧モータを動力非出力状態にさせるため、ウィンチに掛かるロープ張力の大きさに関わらず常に油圧モータに動力を出力させる場合に比べて、油圧モータを駆動するための圧油の供給に要する油圧ポンプの動力を削減することができる。このため、省エネルギ効果を向上することができる。
【0016】
この場合において、前記油圧モータは、可変容量型であり、前記制御機構は、前記油圧モータの容量を制御するコントローラを含み、前記コントローラは、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータの容量を所定の容量にすることによって前記油圧モータを前記動力出力状態とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータの容量を0にすることによって前記油圧モータを前記動力非出力状態としてもよい(請求項6)。
【0017】
この構成によれば、張力導出装置によって導出されたロープの張力が前記設定値よりも大きい場合には油圧モータを動力出力状態にさせ、張力導出装置によって導出されたロープの張力が前記設定値以下である場合には油圧モータを動力非出力状態にさせる制御機構を具体的に構成することができる。
【0018】
上記制御機構が前記ロープの張力が設定値よりも大きい場合に油圧モータを動力出力状態にさせ、前記ロープの張力が設定値以下である場合に油圧モータを動力非出力状態にさせる構成において、前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、前記ウィンチ動作制御装置は、前記油圧モータの前記出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態と、前記油圧モータの前記出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態とに切り換わるクラッチをさらに備え、前記制御機構は、前記クラッチを前記接続状態と前記切断状態とに切換制御するコントローラを含み、前記コントローラは、前記油圧モータを前記動力出力状態とするときには前記クラッチを前記接続状態にさせる一方、前記油圧モータを前記動力非出力状態とするときには前記クラッチを前記切断状態にさせてもよい(請求項7)。
【0019】
この構成では、油圧モータを動力非出力状態として当該油圧モータからウィンチへ動力を供給させず、電動機のみにウィンチへ動力を供給させる場合に、クラッチが切断状態にされて油圧モータの出力軸とウィンチの入力軸とが切り離される。このため、電動機のみによってウィンチを駆動するときに油圧モータの空転に起因する負荷が電動機に掛かるのを防ぐことができる。その結果、電動機の駆動効率を向上させることができ、省エネルギ効果を向上することができる。
【0020】
また、上記制御機構が前記ロープの張力が設定値よりも大きい場合に油圧モータを動力出力状態にさせ、前記ロープの張力が設定値以下である場合に油圧モータを動力非出力状態にさせる構成において、前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、前記ウィンチ動作制御装置は、前記油圧モータが前記動力出力状態となって前記出力軸が回転するときにはその出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態になり、前記油圧モータが前記動力非出力状態となって前記出力軸が回転しないときにはその出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態になるワンウェイクラッチをさらに備えていてもよい(請求項8)。
【0021】
この構成によれば、油圧モータが動力非出力状態から動力出力状態になってその油圧モータの出力軸が回転を開始するときにはワンウェイクラッチが自動的に切断状態から接続状態に切り換わる。仮に、油圧モータの動作制御と並行してコントローラがクラッチの切断/接続の切り換え制御を行う場合には、クラッチが接続状態にされるタイミングが油圧モータの出力軸が回転を開始するタイミングよりも僅かに遅くなる場合があり、この場合には、クラッチのウィンチ側と油圧モータ側との間で回転数差が大きくなり、その結果、クラッチの接続時にショックが発生する。本構成では、油圧モータの出力軸が回転を開始すると自動的にワンウェイクラッチが接続状態となるので、そのようなタイミングのずれが生じず、クラッチが接続状態に切り換わるときに発生するショックを抑制できる。
【発明の効果】
【0022】
以上説明したように、本発明によれば、電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにそのウィンチに高トルクを付与することが可能であり、且つ、そのウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1実施形態によるクレーンのウィンチ動作制御装置の構成を説明するための模式図である。
【図2】本発明の第1実施形態のウィンチ動作制御装置による吊荷用ウィンチの動作制御のプロセスを示すフローチャートである。
【図3】アクセルペダルの操作量に応じて変化する操作レバーの操作量と吊荷用ウィンチ電動機の回転数目標値との相関関係を示す図である。
【図4】アクセルペダルの操作量とエンジン回転数との相関関係を示す図である。
【図5】本発明の第2実施形態によるクレーンのウィンチの動作制御装置の構成を説明するための模式図である。
【図6】本発明の第3実施形態によるクレーンのウィンチ動作制御装置の構成を説明するための模式図である。
【図7】本発明の第3実施形態のウィンチ動作制御装置による吊荷用ウィンチの動作制御のプロセスを示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を図面を参照して説明する。
【0025】
(第1実施形態)
まず、図1を参照して本発明の第1実施形態によるウィンチ動作制御装置1について説明する。この第1実施形態によるウィンチ動作制御装置1は、クレーンに設けられており、吊荷用ウィンチ50の動作を制御する。吊荷用ウィンチ50は、クレーンの本体に搭載されており、本発明のウィンチの概念に含まれるものである。クレーンは、その本体に起伏自在となるように設けられた起伏部材を備えており、その起伏部材の先端から吊りロープを介して吊り下げられるフック装置によって吊荷が吊られる。吊荷用ウィンチ50は、クレーンの本体に搭載されており、吊りロープの巻き取り及び繰り出しを行ってフック装置とともに吊荷を昇降させる。吊荷用ウィンチ50は、吊りロープが巻かれる吊荷用ウィンチドラム50aと、後述する吊荷用ウィンチ電動機2から出力される動力(回転力)を減速して吊荷用ウィンチドラム50aに伝達する電動機側減速機50bと、後述する吊荷用ウィンチ油圧モータ8から出力される動力(回転力)を減速して吊荷用ウィンチドラム50aに伝達する油圧モータ側減速機50cとを有する。吊りロープは、吊荷用ウィンチドラム50aから起伏部材の先端へ向かって延び、起伏部材の先端に設けられたトップシーブとフック装置に設けられたフックシーブとに複数回掛け回されている。また、クレーンは、その本体に搭載され、起伏部材を起伏させるための起伏用ウィンチを備えている。この起伏用ウィンチは、起伏用油圧モータが出力する動力によって作動して起伏部材に繋がる起伏用ロープの巻き取り及び繰り出しを行い、それによって起伏部材を起伏させる。
【0026】
また、クレーンは、エンジン52と、そのエンジン52が出力する動力を後述する吊荷用油圧ポンプ10と起伏用油圧ポンプ16とに分配する動力分割機構54と、エンジン52の回転数の増減を指示するためのアクセル装置56とを備えている。アクセル装置56は、アクセルペダル56aと、アクセル装置本体56bとを有する。アクセル装置本体56bは、アクセルペダル56aの操作量(踏み込み量)を示すアクセル信号を後述のコントローラ24へ出力し、コントローラ24は、そのアクセル信号が示すアクセルペダル56aの操作量に応じてエンジン52の回転数を増減させる。
【0027】
また、クレーンは、吊荷用ウィンチ50を操作するための操作装置58を備えている。この操作装置58は、操作レバー58aと、操作装置本体58bとを有する。操作レバー58aは、吊荷用ウィンチ50を操作するために用いられるものであり、中立姿勢から一方側とその反対側である他方側とに傾倒可能となるように操作装置本体58bによって支持されている。操作装置本体58bは、操作レバー58aの中立姿勢からの操作量(傾倒量)に応じた大きさのパイロット圧を発生させ、そのパイロット圧を後述する制御弁22の2つのパイロットポート22a,22bのうち操作レバー58aの中立姿勢からの操作方向(傾倒方向)に応じたパイロットポートに供給する。なお、操作レバー58aの操作に応じた吊荷用ウィンチ50の操作に関する詳細な構成については、後述する。
【0028】
この第1実施形態によるウィンチ動作制御装置1は、吊荷用ウィンチ50の動作を制御して吊荷の巻き上げ及び巻き下げを制御する。具体的には、ウィンチ動作制御装置1は、吊荷用ウィンチ電動機2と、発電機4と、バッテリ6と、吊荷用ウィンチ油圧モータ8と、吊荷用油圧ポンプ10と、モーメントリミッタ12と、制御機構14とを備えている。
【0029】
吊荷用ウィンチ電動機2は、電力が供給されることによって作動し、吊荷用ウィンチ50を駆動するための動力を出力する。この吊荷用ウィンチ電動機2が、本発明の電動機の概念に含まれるものである。吊荷用ウィンチ電動機2は、電動機側減速機50bに繋がる出力軸2aを有する。吊荷用ウィンチ電動機2は、出力軸2aを通じて動力(回転力)を電動機側減速機50bへ出力し、その出力された動力は、電動機側減速機50bによって所定の減速比で減速されて吊荷用ウィンチドラム50aへ伝達される。また、吊荷用ウィンチ電動機2は、吊荷用ウィンチ50の回転速度(吊荷用ウィンチドラム50aの回転速度)が低下する時又は吊荷用ウィンチ50が吊りロープを繰り出して吊荷を降下させる時(吊荷の巻き下げ時)には、発電機として機能し、電力の回生を行う。
【0030】
吊荷用ウィンチ電動機2は、後述するインバータ25及びコンバータ26を介して発電機4と電気的に接続されている。また、吊荷用ウィンチ電動機2は、インバータ25を介してバッテリ6と電気的に接続されており、発電機4は、コンバータ26を介してバッテリ6と電気的に接続されている。なお、バッテリ6は、本発明の蓄電装置の概念に含まれるものである。発電機4は、エンジン52の駆動軸52aと接続されており、エンジン52から駆動軸52aを通じて出力される動力を受けて作動し、発電する。発電機4によって発電された電力は、吊荷用ウィンチ電動機2に供給されるとともに、その電力の一部はバッテリ6に蓄えられる。また、バッテリ6は、吊荷用ウィンチ電動機2が発電機として機能して回生した電力を蓄える。そして、バッテリ6は、吊荷用ウィンチ50の回転速度(吊荷用ウィンチドラム50aの回転速度)を上昇させる時又は吊荷用ウィンチ50が吊りロープを巻き取って吊荷を上昇させる時(吊荷の巻き上げ時)には、蓄えた電力を吊荷用ウィンチ電動機2に供給して吊荷用ウィンチ電動機2を作動させる。すなわち、吊荷用ウィンチ電動機2は、発電機4から供給される電力及び/又はバッテリ6から供給される電力によって作動する。
【0031】
吊荷用ウィンチ油圧モータ8は、圧油が供給されることによって作動し、吊荷用ウィンチ50を駆動するための動力を出力する。この吊荷用ウィンチ油圧モータ8は、本発明の油圧モータの概念に含まれるものである。吊荷用ウィンチ油圧モータ8は、動力を出力するための出力軸8aを有し、この出力軸8aは、油圧モータ側減速機50cに繋がる。吊荷用ウィンチ油圧モータ8は、出力軸8aを通じて動力(回転力)を油圧モータ側減速機50cへ出力し、その出力された動力は、油圧モータ側減速機50cによって所定の減速比で減速されて吊荷用ウィンチドラム50aへ伝達される。吊荷用ウィンチ油圧モータ8は、圧油が供給される巻上側供給口8b及び巻下側供給口8cを有する。吊荷用ウィンチ油圧モータ8は、巻上側供給口8bに圧油が供給された場合には、吊荷を巻き上げる方向に吊荷用ウィンチドラム50aを回転させる回転力を発するように作動するとともに、その巻上側供給口8bに供給される圧油の流量に応じた回転数の回転力を出力する。また、吊荷用ウィンチ油圧モータ8は、巻下側供給口8cに圧油が供給された場合には、吊荷を巻き下げる方向に吊荷用ウィンチドラム50aを回転させる回転力を発するように作動するとともに、その巻下側供給口8cに供給される圧油の流量に応じた回転数の回転力を出力する。
【0032】
また、吊荷用ウィンチ油圧モータ8は、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能である。具体的には、吊荷用ウィンチ油圧モータ8は、可変容量型であり、その容量が所定の容量にされることによって当該吊荷用ウィンチ油圧モータ8に圧油が供給されたときに動力を出力可能な動力出力状態となり、その容量が0にされることによって当該吊荷用ウィンチ油圧モータ8に圧油が供給されても動力を出力しない動力非出力状態となる。この吊荷用ウィンチ油圧モータ8の容量は、後述するコントローラ24によって制御される。
【0033】
吊荷用油圧ポンプ10は、吊荷用ウィンチ油圧モータ8を駆動するための圧油を吐出するものである。吊荷用油圧ポンプ10は、エンジン52が出力する動力を受けるように動力分割機構54を介してエンジン52と接続されている。また、動力分割機構54には、前記起伏用油圧モータを駆動するための圧油を吐出する起伏用油圧ポンプ16が接続されている。すなわち、エンジン52から出力される動力が動力分割機構54によって吊荷用油圧ポンプ10と起伏用油圧ポンプ16とに分配されるようになっており、吊荷用油圧ポンプ10と起伏用油圧ポンプ16は、その分配された動力によって作動し、圧油を吐出する。また、吊荷用油圧ポンプ10及び起伏用油圧ポンプ16は、共に可変容量型である。
【0034】
モーメントリミッタ12は、クレーンの転倒を防止するための吊荷のモーメントを演算する装置である。モーメントリミッタ12は、吊荷のモーメントを演算する過程で吊荷の重量を算出するため、本実施形態では、このモーメントリミッタ12が、算出した吊荷の重量に基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。具体的には、モーメントリミッタ12は、その算出した吊荷の重量と、トップシーブ及びフックシーブに掛け回される吊りロープの掛け数とに基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。トップシーブ及びフックシーブに掛け回される吊りロープの掛け数のデータは、オペレータ等がクレーンに設けられた図略の入力装置によって入力し、モーメントリミッタ12は、その入力された掛け数のデータを用いて吊荷用ウィンチ50に掛かる吊りロープの張力を算出する。例えば、トップシーブ及びフックシーブへの吊りロープの掛け数が4である場合に吊荷用ウィンチ50に掛かる吊りロープの張力は、吊りロープの掛け数が1である場合に吊荷用ウィンチ50に掛かる吊りロープの張力の1/4になる。モーメントリミッタ12は、このような関係に基づいて吊荷用ウィンチ50に掛かる吊りロープの張力を導出する。そして、モーメントリミッタ12は、導出した吊りロープの張力のデータを後述するコントローラ24へ送る。なお、このモーメントリミッタ12は、本発明の張力導出装置の概念に含まれる。
【0035】
制御機構14は、操作レバー58aの操作に応じて吊荷用ウィンチ電動機2の動作と吊荷用ウィンチ油圧モータ8の動作を制御し、それによって、吊荷用ウィンチ50が操作レバー58aの操作に応じた吊りロープの巻き取り又は繰り出し(吊荷の巻き上げ又は巻き下げ)を行うように吊荷用ウィンチ50の動作を制御する。
【0036】
具体的には、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が予め設定された設定値よりも大きい場合には、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方に吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させ、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させず、吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させる。換言すれば、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力に関係なく、吊荷の昇降時には常に吊荷用ウィンチ電動機2を作動させてその吊荷用ウィンチ電動機2から吊荷用ウィンチ50へ動力を供給させ、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値を超えた場合、すなわち吊荷用ウィンチ50に高い負荷が掛かった場合にのみ吊荷用ウィンチ油圧モータ8を作動させてその吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させ、この吊荷用ウィンチ油圧モータ8の動力と吊荷用ウィンチ電動機2の動力の両方によって吊荷用ウィンチ50を作動させる。なお、前記設定値は、吊荷用ウィンチ電動機2の最大トルクに対応する張力よりも僅かに小さい値に設定されている。また、制御機構14は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きい場合には、吊荷用ウィンチ油圧モータ8を動力出力状態にさせることによって吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させ、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8を動力非出力状態にさせることによって吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力を供給させないようにする。
【0037】
また、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値よりも大きい場合には、吊荷用ウィンチ電動機2が出力するトルクが操作レバー58aの中立姿勢からの操作量に応じたトルクとなるように吊荷用ウィンチ電動機2の動作を制御する吊荷用ウィンチ電動機2のトルク制御を行うとともに、操作レバー58aの中立姿勢からの操作量に応じた流量の圧油を吊荷用ウィンチ油圧モータ8に供給して吊荷用ウィンチ油圧モータ8の回転数を制御することにより吊荷用ウィンチ50の回転数(吊荷用ウィンチドラム50aの回転数)を吊荷用ウィンチ油圧モータ8の回転数に応じた回転数とする。一方、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、吊荷用ウィンチ電動機2の回転数が操作レバー58aの中立姿勢からの操作量に応じた回転数となるように吊荷用ウィンチ電動機2の動作を制御する吊荷用ウィンチ電動機2の回転数制御を行うとともに吊荷用ウィンチ油圧モータ8が作動しないようにして吊荷用ウィンチ50の回転数(吊荷用ウィンチドラム50aの回転数)を吊荷用ウィンチ電動機2の回転数に応じた回転数にする。
【0038】
制御機構14は、制御弁22と、巻上側圧力センサ23aと、巻下側圧力センサ23bと、コントローラ24と、インバータ25と、コンバータ26とを備えている。
【0039】
制御弁22は、吊荷用油圧ポンプ10から吐出される圧油を流す方向を操作レバー58aの操作状態に応じて切り換えるための三位置切換弁である。制御弁22は、供給路27aを介して吊荷用油圧ポンプ10の圧油の吐出口と接続されており、この供給路27aを通じて吊荷用油圧ポンプ10から送られてくる圧油の流通方向を切り換える。なお、供給路27aには、制御弁22側から吊荷用油圧ポンプ10側への圧油の逆流を防止するための逆止弁29が設けられている。また、制御弁22は、巻上側油路27bを介して吊荷用ウィンチ油圧モータ8の巻上側供給口8bと接続され、巻下側油路27cを介して吊荷用ウィンチ油圧モータ8の巻下側供給口8cと接続されている。また、制御弁22は、圧油を貯留するタンクTと接続されている。制御弁22は、巻上側パイロット路28aを介して操作装置本体58bと接続された巻上側パイロットポート22aと、巻下側パイロット路28bを介して操作装置本体58bと接続された巻下側パイロットポート22bとを有する。巻上側パイロットポート22aには、操作レバー58aが中立姿勢から巻き上げ側に操作された場合に操作装置本体58bから巻上側パイロット路28aを通じてパイロット圧が供給され、巻下側パイロットポート22bには、操作レバー58aが中立姿勢から巻き下げ側に操作された場合に操作装置本体58bから巻下側パイロット路28bを通じてパイロット圧が供給される。
【0040】
また、制御弁22は、スプールが中立位置22c、巻上位置22d及び巻下位置22eの間で移動可能となるように構成されている。制御弁22は、操作レバー58aが中立姿勢にあって操作装置本体58bから両パイロットポート22a,22bにパイロット圧が供給されない状態では、スプールが中立位置22cに位置し、吊荷用油圧ポンプ10から吐出される圧油をタンクTへ流す。また、制御弁22は、操作レバー58aが巻き上げ側に操作されて操作装置本体58bから巻上側パイロットポート22aにパイロット圧が供給された場合には、それに応じてスプールが巻上位置22d側へ移動し、吊荷用油圧ポンプ10から吐出される圧油を巻上側パイロットポート22aに供給されるパイロット圧の大きさに応じた流量で巻上側油路27b及び油路27dを通じて吊荷用ウィンチ油圧モータ8の巻上側供給口8bへ流す。また、制御弁22は、操作レバー58aが巻き下げ側に操作されて操作装置本体58bから巻下側パイロットポート22bにパイロット圧が供給された場合には、それに応じてスプールが巻下位置22e側へ移動し、吊荷用油圧ポンプ10から吐出される圧油を巻下側パイロットポート22bに供給されるパイロット圧の大きさに応じた流量で巻下側油路27cを通じて吊荷用ウィンチ油圧モータ8の巻下側供給口8cへ流す。
【0041】
巻上側油路27bには、カウンタバランス弁30が設けられている。このカウンタバランス弁30は、巻下側油路27cを通じて吊荷用ウィンチ油圧モータ8に圧油が供給されて吊荷を巻き下げる方向に吊荷用ウィンチ油圧モータ8が作動するときに巻上側油路27bに背圧を発生させて吊荷の巻き下げに対するブレーキ力を吊荷用ウィンチ油圧モータ8に発生させる。また、巻上側油路27bには、油路27dがカウンタバランス弁30をバイパスするように接続されている。制御弁22から巻上側油路27bに圧油が流れるときには、その圧油は、油路27dを通じて吊荷用ウィンチ油圧モータ8の巻上側供給口8bへ流れる。なお、油路27dには、吊荷用ウィンチ油圧モータ8の巻上側供給口8b側から制御弁22側へ圧油が流れるのを防止する一方、制御弁22側から吊荷用ウィンチ油圧モータ8の巻上供給口8b側へ圧油が流れるのを許容するチェック弁27eが設けられている。
【0042】
巻上側圧力センサ23aは、巻上側パイロット路28aに接続されており、操作レバー58aが中立姿勢から巻き上げ側へ操作されることに応じて操作装置本体58bから巻上側パイロットポート22aへ供給されるパイロット圧を検出する。巻上側圧力センサ23aは、その検出したパイロット圧のデータをコントローラ24へ送る。
【0043】
巻下側圧力センサ23bは、巻下側パイロット路28bに接続されており、操作レバー58aが中立姿勢から巻き下げ側へ操作されることに応じて操作装置本体58bから巻下側パイロットポート22bへ供給されるパイロット圧を検出する。巻下側圧力センサ23bは、その検出したパイロット圧のデータをコントローラ24へ送る。
【0044】
コントローラ24は、吊荷用ウィンチ電動機2の出力軸2aの回転方向の制御と、吊荷用ウィンチ電動機2の回転数又は出力トルクの制御と、吊荷用ウィンチ油圧モータ8の容量の制御を行う。
【0045】
具体的には、コントローラ24は、吊荷用ウィンチ電動機2の動作制御については、インバータ25及びコンバータ26に制御信号を送ることによってインバータ25及びコンバータ26に吊荷用ウィンチ電動機2へ供給する電流の周波数を制御させ、それによってインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。そして、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値よりも大きい場合には、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られるパイロット圧のデータに基づいて、吊荷用ウィンチ電動機2の出力軸2aが操作レバー58aの中立姿勢からの操作方向に応じた方向に回転し且つ吊荷用ウィンチ電動機2の出力するトルクが操作レバー58aの操作量に応じたトルクになるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。すなわち、コントローラ24は、操作レバー58aが中立姿勢から巻き上げ側へ操作されて巻上側圧力センサ23aからパイロット圧のデータが送られると、吊荷用ウィンチドラム50aを吊荷の巻き上げ方向に回転させる回転方向に出力軸2aが回転し且つ吊荷用ウィンチ電動機2が巻上側圧力センサ23aが検出したパイロット圧の大きさに応じたトルクを出力するようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。
【0046】
また、コントローラ24は、操作レバー58aが中立姿勢から巻き下げ側へ操作されて巻下側圧力センサ23bからパイロット圧のデータが送られた場合には、出力軸2aの回転方向が逆になること以外は操作レバー58aが巻き上げ側へ操作された場合と同様にしてインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。また、コントローラ24は、この吊荷用ウィンチ50に掛かるロープ張力が前記設定よりも大きい場合には、吊荷用ウィンチ油圧モータ8の容量を予め設定された所定の容量にさせて当該吊荷用ウィンチ油圧モータ8を動力出力状態にさせる。これにより、操作レバー58aが操作されてその操作方向に応じた吊荷用ウィンチ油圧モータ8の供給口8b又は8cへ操作レバー58aの操作量に応じた流量の圧油が供給された場合に、吊荷用ウィンチ油圧モータ8が操作レバー58aの操作方向に応じた方向に作動し、且つ、その操作レバー58aの中立姿勢からの操作量に応じた回転数(回転速度)で作動できるようになる。
【0047】
また、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かる吊りロープの張力が前記設定値以下である場合には、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られるパイロット圧のデータに基づいて、吊荷用ウィンチ電動機2の出力軸2aが操作レバー58aの中立姿勢からの操作方向に応じた方向に回転し且つ吊荷用ウィンチ電動機2の回転数(回転速度)が操作レバー58aの操作量に応じた回転数になるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2を作動させる。この場合の吊荷用ウィンチ電動機2の動作制御は、吊荷用ウィンチ電動機2の出力トルクを制御する代わりに吊荷用ウィンチ電動機2の回転数を制御することを除いて、上記吊荷用ウィンチ50に掛かるロープ張力が設定値よりも大きい場合の吊荷用ウィンチ電動機2の動作制御と同様である。また、コントローラ24は、この吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8の容量を0にさせて当該吊荷用ウィンチ油圧モータ8を動力非出力状態にさせる。これにより、操作レバー58aが操作されて吊荷用ウィンチ油圧モータ8に圧油が供給されても吊荷用ウィンチ油圧モータ8は作動せず、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50へ動力が供給されない。
【0048】
また、コントローラ24は、アクセル装置本体56bから送られてくるアクセル信号が示すアクセルペダル56aの操作量に応じてエンジン52の回転数を制御する。なお、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きく、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8を両方とも作動させる時には、エンジン52の回転数をアクセルペダル56aの操作量に応じて制御する一方、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になり、吊荷用ウィンチ電動機2のみを作動させる場合には、エンジン52の回転数を低減させる。また、コントローラ24は、アクセル装置本体56bから送られてくるアクセル信号が示すアクセルペダル56aの操作量に応じて操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を調整する。具体的には、アクセルペダル56aの操作量が大きい場合には、操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を上昇させ、アクセルペダル56aの操作量が小さい場合には、操作レバー58aの操作量の増減に対する吊荷用ウィンチ電動機2の回転数の増減率を低下させる。
【0049】
次に、本発明の第1実施形態のウィンチ動作制御装置1による吊荷用ウィンチ50の動作制御のプロセスについて説明する。
【0050】
まず、モーメントリミッタ12が、吊荷用ウィンチ50に掛かる吊りロープの張力(ウィンチラインプル)を導出する(図2のステップS2)。
【0051】
次に、コントローラ24が、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が予め設定された前記設定値よりも大きいか否かを判断する(ステップS4)。ここで、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きいと判断した場合には、吊荷用ウィンチ電動機2のトルク制御を行う(ステップS6)。
【0052】
この吊荷用ウィンチ電動機2のトルク制御では、コントローラ24は、吊荷用ウィンチ電動機2に出力させるトルクの目標値を設定し、吊荷用ウィンチ電動機2が実際に出力するトルクがその設定したトルク目標値となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。この時、コントローラ24は、以下のようにしてトルク目標値を設定する。
【0053】
まず、吊荷を一定速度で巻き上げる時には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、吊荷用ウィンチ電動機2の負荷トルク(以下、電動機負荷トルクという)とバランスする力行方向トルクを求める。なお、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力に吊荷用ウィンチ50の有効半径(吊荷用ウィンチドラム50aのロープ巻取り半径)を乗じ、電動機側減速機50bの減速比で除することによって前記電動機負荷トルクを算出する。また、前記力行方向トルクは、吊荷用ウィンチ電動機2の回転方向に対して順方向のトルクである。
【0054】
また、吊荷の巻き上げの加速時には、加速方向への慣性力が作用するため、コントローラ24は、上記のように算出した電動機負荷トルクに慣性力に相当する力行方向トルクを加算することによってトルク目標値を求める。ここで、コントローラ24は、巻上側圧力センサ23aから送られてくるパイロット圧のデータに基づいて操作レバー58aが巻き上げ側へ急激に操作されたことを検知した場合には、電動機負荷トルクに加算する力行方向トルクを増加させてトルク目標値を求めてもよい。
【0055】
また、吊荷の巻き上げの減速時には、コントローラ24は、上記のように算出した電動機負荷トルクから減速方向の慣性力に相当するトルクを減算することによってトルク目標値を求める。このように求められたトルク目標値は、吊荷の巻き下げの減速時に吊荷用ウィンチ電動機2に電力を回生させるようなトルク目標値となり、吊荷用ウィンチ電動機2の出力トルクがこのトルク目標値となるようにコントローラ24がインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させることによって、吊荷用ウィンチ電動機2において当該吊荷用ウィンチ電動機2の運動エネルギが電力に回生される。
【0056】
また、吊荷を一定速度で巻き下げる時には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、吊荷用ウィンチ50に掛かるロープ張力とバランスする回生方向トルクを求める。この回生方向トルクは、吊荷用ウィンチ電動機2の回転方向に対して逆方向のトルクである。また、吊荷の巻き下げの減速時には、コントローラ24は、前記回生方向トルクに減速方向の慣性力に相当するトルクを加算することによってトルク目標値を求める。このように求められたトルク目標値は、吊荷を一定速度で巻き下げる時及び吊荷の巻き下げの減速時に吊荷用ウィンチ電動機2に電力を回生させるようなトルク目標値となり、吊荷用ウィンチ電動機2の出力トルクがこのトルク目標値となるようにコントローラ24がインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させることによって、吊荷用ウィンチ電動機2において吊荷の位置エネルギ又は吊荷用ウィンチ電動機2の運動エネルギが電力に回生される。
【0057】
また、吊荷の巻き下げの加速時には、コントローラ24は、前記回生方向トルクから加速方向の慣性力に相当するトルクを減算することによってトルク目標値を求める。なお、吊荷の巻き下げを急加速させたい場合には、コントローラ24は、吊荷用ウィンチ電動機2のトルク目標値として、回生方向のトルクではなく、力行方向のトルクを求めてもよい。
【0058】
次に、操作レバー58aの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数制御が行われる(ステップS8)。具体的には、吊荷用ウィンチ油圧モータ8の回転数が操作レバー58aの中立姿勢からの操作量に応じた回転数となるように吊荷用ウィンチ油圧モータ8の動作が制御される。このとき、コントローラ24は、吊荷用ウィンチ油圧モータ8の容量を予め設定された所定の容量にさせる。この状態で、制御弁22の巻上側パイロットポート22a又は巻下側パイロットポート22bに操作装置本体58bから操作レバー58aの中立姿勢からの操作量に応じた大きさのパイロット圧が供給され、制御弁22が吊荷用油圧ポンプ10から吐出される圧油を当該制御弁22に供給されたパイロット圧の大きさに応じた流量で吊荷用ウィンチ油圧モータ8の巻上側供給口8b又は巻下側供給口8cへ供給すると、吊荷用ウィンチ油圧モータ8は、その供給された圧油の流量に応じた回転数で作動する。結果的に、吊荷用ウィンチ油圧モータ8は、操作レバー58aの中立姿勢からの操作量の増減に応じて回転数が増減するように駆動される。
【0059】
以上のように、吊荷用ウィンチ電動機2がトルク制御され、且つ、吊荷用ウィンチ油圧モータ8が操作レバー58aの操作量に応じた流量の圧油が供給されることによって駆動される場合には、吊荷用ウィンチ50の負荷トルクに対して吊荷用ウィンチ電動機2が出力するトルクが不足していると、吊荷用ウィンチ油圧モータ8に繋がる油圧回路(巻上側油路27b、巻下側油路27c及び制御弁22)内の圧油がこのトルクの不足分に応じて圧縮され、そのトルクの不足分に相当する保持圧が油圧回路内に発生する。その結果、自動的に、吊荷用ウィンチ電動機2の出力トルクと吊荷用ウィンチ油圧モータ8の出力トルクとの合計のトルク(吊荷用ウィンチ50を駆動するトルク)と、吊荷用ウィンチ50に掛かるロープ張力とのバランスが取れる。一方、吊荷用ウィンチドラム50aの回転速度は、吊荷用ウィンチ油圧モータ8の回転速度に従った速度に制御される。
【0060】
次に、コントローラ24は、アクセルペダル56aの操作量に応じたエンジン52の回転数制御を行う(ステップS10)。具体的には、コントローラ24は、図4中の実線で示すアクセルペダル56aの操作量とエンジン52の回転数との相関関係に従って、エンジン52の回転数がアクセルペダル56aの操作量に対応する回転数となるようにエンジン52を制御する。
【0061】
一方、上記ステップS4において、コントローラ24は、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくない、すなわち前記設定値以下であると判断した場合には、次に、吊荷用ウィンチ電動機2の速度制御(回転数制御)を行う(ステップS12)。具体的には、コントローラ24は、巻上側圧力センサ23a又は巻下側圧力センサ23bから送られてくるパイロット圧のデータに基づいて操作レバー58aの中立姿勢からの操作量を検知し、吊荷用ウィンチ電動機2の回転数がこの検知した操作レバー58aの操作量に応じた回転数となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。この時、コントローラ24は、図3に示すような相関関係に基づいて、操作レバー58aの操作量とアクセルペダル56aの操作量とに応じた吊荷用ウィンチ電動機2の回転数目標値を求め、吊荷用ウィンチ電動機2の実際の回転数がこの求めた回転数目標値となるようにインバータ25及びコンバータ26に吊荷用ウィンチ電動機2の動作を制御させる。なお、図3に示す相関関係は、アクセルペダル56aの操作量が増加するにつれて操作レバー58aの操作量の増減に対する回転数目標値の増減率が増大するような相関関係である。
【0062】
次に、吊荷用ウィンチ油圧モータ8が出力する動力が0になるように吊荷用ウィンチ油圧モータ8が制御される(ステップS14)。具体的には、コントローラ24は、吊荷用ウィンチ油圧モータ8の容量を0にさせ、操作レバー58aが操作されて吊荷用ウィンチ油圧モータ8に圧油が供給されたとしても、吊荷用ウィンチ油圧モータ8が作動しないようにする。この結果、吊荷用ウィンチ50は、吊荷用ウィンチ電動機2のみによって駆動される。なお、この時、コントローラ24は、吊荷用油圧ポンプ10の容量を最小にして吊荷用油圧ポンプ10の駆動に要する動力を最小にする。
【0063】
次に、コントローラ24は、他の油圧アクチュエータ、例えば起伏用油圧モータ等の複合操作が有るか否かを判断する(ステップS16)。コントローラ24は、他の油圧アクチュエータの複合操作があると判断した場合には、上記ステップS10のアクセルペダル56aの操作量に応じたエンジン52の回転数制御を実施する。
【0064】
一方、コントローラ24は、他の油圧アクチュエータの複合操作がないと判断した場合には、エンジン52の回転数の低減制御を行う(ステップS18)。この時、コントローラ24は、図4の破線で示すように、アクセルペダル56aの操作量に関わらず、エンジン52の回転数が一定の低い回転数となるようにエンジン52の駆動を制御する。
【0065】
そして、この第1実施形態によるウィンチ動作制御装置1では、以上のような一連の制御ステップを繰り返し実施する。
【0066】
この第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値よりも大きくなった場合、すなわち、吊荷用ウィンチ50に高負荷が掛かったときには、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給されるため、吊荷用ウィンチ50に高トルクを付与することができる。一方、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下になった場合、すなわち、吊荷用ウィンチ50に低負荷しか掛かっていないときには、油圧モータに比べて駆動効率の良い吊荷用ウィンチ電動機2のみによって吊荷用ウィンチ50を駆動するため、吊荷用ウィンチ50の駆動効率を向上することができる。そして、この第1実施形態では、吊荷用ウィンチ50に高負荷が掛かったときには、吊荷用ウィンチ50を駆動するための動力を吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8とで分担するため、吊荷用ウィンチ電動機2単体又は吊荷用ウィンチ油圧モータ8単体で吊荷用ウィンチ50を駆動する場合に比べて、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8のそれぞれに要求されるトルクは小さくなる。また、この第1実施形態では、吊荷用ウィンチ50に低負荷しか掛かっていないときには、吊荷用ウィンチ電動機2のみによって吊荷用ウィンチ50を駆動するが、このときの吊荷用ウィンチ50の駆動に必要とされるトルクは小さい。従って、この第1実施形態では、吊荷用ウィンチ電動機2及び吊荷用ウィンチ油圧モータ8の大型化を防ぐことができる。
【0067】
さらに、この第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値よりも大きい場合及び設定値以下である場合のいずれの場合も、吊荷用ウィンチ電動機2は、吊荷用ウィンチ50に動力を供給して吊荷用ウィンチ50を作動させるため、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下から設定値よりも大きくなるとき又は設定値よりも大きい状態から設定値以下へ低下するとき、すなわち、吊荷用ウィンチ50に掛かる負荷が低負荷から高負荷へ又は高負荷から低負荷へ変化するときに、少なくとも吊荷用ウィンチ電動機2からのトルクは常に吊荷用ウィンチ50に付与されている。このため、吊荷の昇降時に吊荷用ウィンチ50に与えられるトルクに抜けが生じるのを防ぐことができる。このため、接地状態の吊荷の地切り作業を行うときに吊荷が地面から離れて吊荷の全荷重が吊りロープを介して吊荷用ウィンチ50に掛かり、その結果、吊荷に掛かる負荷が低負荷から高負荷となる場合でも、吊荷用ウィンチ50に与えられるトルクに抜けが生じるのを防いで、吊荷の吊り上げ速度が不連続になったり、吊荷にショックが与えられて吊荷が外れたりするのを防ぐことができる。
【0068】
また、第1実施形態では、モーメントリミッタ12によって導出される吊荷用ウィンチ50に掛かるロープ張力が設定値よりも大きくなって吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、吊荷用ウィンチ50の回転数が、操作レバー58aの中立姿勢からの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数によって制御されるため、吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御とが干渉するのを防ぐことができる。仮に、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に吊荷用ウィンチ電動機2の回転数と吊荷用ウィンチ油圧モータ8の回転数の両方を制御することによって吊荷用ウィンチ50の回転数を制御しようとすると、吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御とが互いに干渉して吊荷用ウィンチ50の回転数を有効に制御できない場合がある。また、この場合には、吊荷用ウィンチ油圧モータ8に繋がる油圧回路(巻上側油路27b、巻下側油路27c及び制御弁22)においてキャビテーションが生じる虞がある。これに対して、この第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に吊荷用ウィンチ油圧モータ8の回転数に応じて吊荷用ウィンチ50の回転数が制御されるので、上記のような吊荷用ウィンチ電動機2の回転数制御と吊荷用ウィンチ油圧モータ8の回転数制御との干渉が生じるのを防ぐことができ、吊荷用ウィンチ50の回転数を有効に制御することができるとともに吊荷用ウィンチ油圧モータ8にキャビテーションが生じるのを防ぐことができる。
【0069】
また、第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、吊荷用ウィンチ電動機2のトルクが操作レバー58aの中立姿勢からの操作量に応じたトルクとなるように吊荷用ウィンチ電動機2の動作が制御されるため、吊荷用ウィンチ電動機2に不必要な過剰なトルクを出力させるのを防ぐことができる。従って、この第1実施形態では、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力が供給される時に、トルクのロスを削減しつつ、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両者で協調して吊荷用ウィンチ50の回転数及び駆動トルクを操作レバー58aの中立姿勢からの操作量に応じた値に制御することができる。
【0070】
また、第1実施形態では、吊荷用ウィンチ50に掛かる吊りロープの張力が設定値以下となって吊荷用ウィンチ電動機2のみから吊荷用ウィンチ50へ動力が供給される時には、吊荷用ウィンチ油圧モータ8は作動せず、操作レバー58aの中立姿勢からの操作量に応じた吊荷用ウィンチ電動機2の回転数に従って吊荷用ウィンチ50の回転数が制御されるため、この時も、吊荷用ウィンチ50の回転数を操作レバー58aの操作量に応じた回転数に制御することができる。
【0071】
また、第1実施形態では、バッテリ6が、吊荷用ウィンチ50の回転速度が低下する時又は吊荷用ウィンチ50が吊荷を巻き下げる時には吊荷用ウィンチ電動機2によって回生された電力を蓄え、吊荷用ウィンチ50の回転速度が上昇する時又は吊荷用ウィンチ50が吊荷を巻き上げる時には蓄えた電力を吊荷用ウィンチ電動機2へ供給するため、吊荷用ウィンチ50の回転速度の低下時や吊荷用ウィンチ50が吊荷を巻き下げる時に得られる運動エネルギや位置エネルギを電力として回生し、その電力を用いて、吊荷用ウィンチ50の回転速度の上昇時や吊荷用ウィンチ50が吊荷を巻き上げる時に吊荷用ウィンチ電動機2に吊荷用ウィンチ50を駆動させることができる。このため、省エネルギ効果を得ることができる。
【0072】
また、第1実施形態では、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が設定値以下である場合には、吊荷用ウィンチ油圧モータ8の容量を0にして当該吊荷用ウィンチ油圧モータ8を動力非出力状態にさせるため、例えば吊荷用ウィンチ50に掛かるロープ張力の大きさに関わらず常に吊荷用ウィンチ油圧モータ8に動力を出力させるような構成に比べて、吊荷用ウィンチ油圧モータ8を駆動するための圧油の供給に要する吊荷用油圧ポンプ10の動力を削減することができる。このため、省エネルギ効果を向上することができる。
【0073】
また、第1実施形態では、吊荷用ウィンチ50を吊荷用ウィンチ電動機2のみによって駆動するときには、エンジン52の回転数の低減制御を行うため、エンジン52の燃料消費量を削減することができ、省エネルギ効果を高めることができる。
【0074】
(第2実施形態)
次に、図5を参照して、本発明の第2実施形態によるクレーンのウィンチ動作制御装置1について説明する。
【0075】
この第2実施形態では、エンジンの動力によって吊荷用油圧ポンプ10及び起伏用油圧ポンプ16を駆動せず、電動機によって吊荷用油圧ポンプ10及び起伏用油圧ポンプ16を駆動する点で上記第1実施形態と異なる。
【0076】
具体的には、この第2実施形態では、クレーンに吊荷用油圧ポンプ駆動用電動機31と、起伏用油圧ポンプ駆動用電動機32と、吊荷用油圧ポンプ側インバータ34と、起伏用油圧ポンプ側インバータ36とが設けられている。吊荷用油圧ポンプ駆動用電動機31の動力の出力軸31aは、吊荷用油圧ポンプ10と接続されており、吊荷用油圧ポンプ駆動用電動機31は、その出力軸31aを通じて吊荷用油圧ポンプ10へ動力を供給し、吊荷用油圧ポンプ10を作動させる。また、起伏用油圧ポンプ駆動用電動機32の動力の出力軸32aは、起伏用油圧ポンプ16と接続されており、起伏用油圧ポンプ駆動用電動機32は、その出力軸32aを通じて起伏用油圧ポンプ16へ動力を供給し、起伏用油圧ポンプ16を作動させる。
【0077】
また、この第2実施形態では、吊荷用ウィンチ電動機2は、インバータ25を介してバッテリの代わりに外部電源と電気的に接続されている。また、この第2実施形態では、クレーンに発電機及びコンバータが設けられていない。この第2実施形態では、コントローラ24は、外部電源から吊荷用ウィンチ電動機2へ供給される電流の周波数をインバータ25に制御させることによって吊荷用ウィンチ電動機2の回転方向制御、トルク制御及び速度制御(回転数制御)を行う。また、吊荷用油圧ポンプ駆動用電動機31は、吊荷用油圧ポンプ側インバータ34を介して外部電源と電気的に接続されており、起伏用油圧ポンプ駆動用電動機32は、起伏用油圧ポンプ側インバータ36を介して外部電源と電気的に接続されている。コントローラ24は、外部電源から吊荷用油圧ポンプ駆動用電動機31へ供給される電流の周波数を吊荷用油圧ポンプ側インバータ34に制御させることによって吊荷用油圧ポンプ駆動用電動機31の回転数を制御できるようになっている。また、コントローラ24は、外部電源から起伏用油圧ポンプ駆動用電動機32へ供給される電流の周波数を起伏用油圧ポンプ側インバータ36に制御させることによって起伏用油圧ポンプ駆動用電動機32の回転数を制御できるようになっている。
【0078】
この第2実施形態におけるクレーンの上記以外の構成は、上記第1実施形態におけるクレーンの構成と同様であり、当該第2実施形態のクレーンに適用されるウィンチ動作制御装置1の構成は、上記第1実施形態のウィンチ動作制御装置1の構成と同様である。
【0079】
(第3実施形態)
次に、図6を参照して、本発明の第3実施形態によるウィンチ動作制御装置1について説明する。
【0080】
この第3実施形態によるウィンチ動作制御装置1は、クラッチ40によって吊荷用ウィンチ油圧モータ8の動力の出力軸8aと吊荷用ウィンチ50の動力の入力軸50dとを接続する状態と切り離す状態とに切り換えるように構成されている点で上記第1実施形態によるウィンチ動作制御装置1と異なる。
【0081】
具体的には、この第3実施形態によるウィンチ動作制御装置1は、吊荷用ウィンチ油圧モータ8の動力の出力軸8aと吊荷用ウィンチ50の油圧モータ側減速機50cの動力の入力軸50dとの間に設けられたクラッチ40を備えている。なお、入力軸50dは、本発明の油圧モータから出力される動力が入力されるウィンチの入力軸の概念に含まれるものである。クラッチ40は、吊荷用ウィンチ油圧モータ8の出力軸8aと吊荷用ウィンチ50の入力軸50dとが一体的に回転するようにその出力軸8aと入力軸50dを互いに連結する接続状態と、吊荷用ウィンチ油圧モータ8の出力軸8aに対して吊荷用ウィンチ50の入力軸50dが相対的に回転可能となるようにその出力軸8aと入力軸50dとを切り離す切断状態とに切り換わるように構成されている。
【0082】
制御機構14のコントローラ24は、クラッチ40を接続状態と切断状態とに切換制御する。具体的には、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくなって吊荷用ウィンチ油圧モータ8を動力出力状態にするときには、クラッチ40が接続状態になるように指示する制御信号をクラッチ40へ送り、それによって、クラッチ40を接続状態にさせる。一方、コントローラ24は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になって吊荷用ウィンチ油圧モータ8を動力非出力状態にするときには、クラッチ40が切断状態になるように指示する制御信号をクラッチ40へ送り、それによって、クラッチ40を切断状態にさせる。
【0083】
この第3実施形態によるクレーン及びウィンチ動作制御装置1の上記以外の構成は、上記第1実施形態によるクレーン及びウィンチ動作制御装置1の構成と同様である。
【0084】
次に、図7を参照して、この第3実施形態のウィンチ動作制御装置1による吊荷用ウィンチ50の動作制御のプロセスについて説明する。
【0085】
この第3実施形態における吊荷用ウィンチ50の動作制御では、上記第1実施形態におけるステップS2、S4、S6、S8、S10、S12、S14、S16及びS18のプロセスと同様のステップS22、S24、S26、S28、S30、S32、S34、S36及びS38のプロセスを実施する。ただし、この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値よりも大きくなり、吊荷用ウィンチ電動機2のトルク制御が行われた(ステップS26)後、コントローラ24がクラッチ40を接続状態にさせ(ステップS27)、その後、操作レバー58aの操作量に応じた吊荷用ウィンチ油圧モータ8の回転数制御が行われる(ステップS28)。また、この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になり、吊荷用ウィンチ電動機2の速度制御が行われた(ステップS32)後、コントローラ24がクラッチ40を切断状態にさせ(ステップS33)、その後、吊荷用ウィンチ油圧モータ8が出力する動力を0にする制御が行われる(ステップS34)。
【0086】
この第3実施形態による吊荷用ウィンチ50の動作制御プロセスの上記以外の構成は、上記第1実施形態による吊荷用ウィンチ50の動作制御プロセスと同様である。
【0087】
この第3実施形態では、吊荷用ウィンチ50に掛かるロープ張力が前記設定値以下になって吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50を駆動させる場合に、クラッチ40を切断状態として吊荷用ウィンチ油圧モータ8と吊荷用ウィンチ50との間の動力の伝達を遮断する。このため、吊荷用ウィンチ電動機2のみに吊荷用ウィンチ50を駆動させるときに吊荷用ウィンチ油圧モータ8の空転に起因する負荷が吊荷用ウィンチ電動機2に掛かるのを防ぐことができる。その結果、吊荷用ウィンチ電動機2の駆動効率を向上させることができ、省エネルギ効果を向上することができる。
【0088】
この第3実施形態のウィンチ動作制御装置1による上記以外の効果は、上記第1実施形態のウィンチ動作制御装置1による効果と同様である。
【0089】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれる。
【0090】
例えば、上記第3実施形態において、吊荷用ウィンチ油圧モータ8と吊荷用ウィンチ50との間の動力の伝達経路に設けたクラッチ40をワンウェイクラッチにして、コントローラ24によるクラッチの接続/切断の切り換え制御を行うことなく、吊荷用ウィンチ油圧モータ8からの動力の出力の有無に応じて自動的にクラッチの接続/切断が切り換わるようにしてもよい。この構成では、ワンウェイクラッチは、吊荷用ウィンチ油圧モータ8が動力出力状態になってその出力軸8aが回転するときには、その出力軸8aと吊荷用ウィンチ50の油圧モータ側減速機50cの入力軸50dとが一体的に回転するようにその出力軸8aと入力軸50dを互いに連結する接続状態になり、吊荷用ウィンチ油圧モータ8の動力を油圧モータ側減速機50cへ伝達する。一方、ワンウェイクラッチは、吊荷用ウィンチ油圧モータ8が動力非出力状態になってその出力軸8aが回転しないときには、その出力軸8aに対して吊荷用ウィンチ50の油圧モータ側減速機50cの入力軸50dが相対的に回転可能となるようにその出力軸8aと入力軸50dとを切り離す切断状態になる。
【0091】
この構成によれば、吊荷用ウィンチ油圧モータ8が動力非出力状態から動力出力状態になってその吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始するときにワンウェイクラッチが自動的に切断状態から接続状態に切り換わる。仮に、吊荷用ウィンチ油圧モータ8の動作制御と並行してコントローラ24がクラッチ40の切断/接続の切り換え制御を行う場合には、クラッチ40が接続状態にされるタイミングが吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始するタイミングよりも僅かに遅くなる場合があり、この場合には、吊荷用ウィンチ油圧モータ8の出力軸8aと油圧モータ側減速機50cの入力軸50dとの間で回転数差が大きくなり、その結果、クラッチ40の接続時にショックが発生する。これに対して、本構成では、吊荷用ウィンチ油圧モータ8の出力軸8aが回転を開始すると自動的にワンウェイクラッチが接続状態となるので、そのようなタイミングのずれが生じず、クラッチが接続状態に切り換わるときに発生するショックを抑制できる。
【0092】
また、上記実施形態では、吊荷用ウィンチ電動機と吊荷用ウィンチ油圧モータの両方から吊荷用ウィンチへ動力を供給する場合に吊荷用ウィンチ電動機をトルク制御したが、その代わりに、吊荷用ウィンチ電動機が一定のトルクを出力するように吊荷用ウィンチ電動機の動作を制御してもよい。
【0093】
また、上記実施形態では、モーメントリミッタが吊荷用ウィンチに掛かるロープ張力を導出するようにしたが、それ以外の手段で吊荷用ウィンチに掛かるロープ張力を求めるようにしてもよい。例えば、フック装置に設けたロードセルによって吊荷の重量を検出し、そのロードセルによって検出された吊荷の重量と予め入力された吊りロープのトップシーブとフックシーブとの間の掛け数の情報とからコントローラが吊荷用ウィンチに掛かるロープ張力を算出するようにしてもよい。
【0094】
また、上記バッテリ10の代わりに、キャパシタを蓄電装置として用いてもよい。
【0095】
また、クレーンは、下部本体と、その下部本体上に旋回自在となるように搭載された上部旋回体とを備えていて、その上部旋回体を旋回させるための旋回用油圧モータが他の油圧アクチュエータとして設けられていてもよい。この場合には、旋回用油圧モータに圧油を供給する旋回用油圧ポンプが、エンジンの動力を分配する動力分割機構に接続されていてその動力分割機構によって分配されたエンジンの動力によって作動するようになっていてもよい。また、旋回用油圧モータの代わりに、上部旋回体を旋回させるための旋回用電動機が設けられていてもよい。
【0096】
また、操作レバーの操作量に応じた吊荷用ウィンチ油圧モータの回転数制御を行う場合には、吊荷用ウィンチ油圧モータへ供給される圧油の流量の増減に応じて、コントローラが吊荷用油圧ポンプの容量を増減させてもよい。この場合には、吊荷用ウィンチに掛かる吊荷の負荷が小さい場合に吊荷用ウィンチ油圧モータの容量が減少するため、吊荷の負荷が大きい場合よりも吊荷用ウィンチ油圧モータの回転数が増加するように当該油圧モータの動作が制御される。
【0097】
また、吊荷を一定速度で巻き上げる時及び吊荷の巻き上げの加速時には、コントローラは、吊荷用ウィンチ電動機をトルク制御するための目標トルクを吊荷用ウィンチ電動機の力行方向の最大トルクに等しいトルクに設定してもよい。
【0098】
また、吊荷を一定速度で巻き下げる時及び吊荷の巻き上げの減速時には、コントローラは、吊荷用ウィンチ電動機をトルク制御するための目標トルクを吊荷用ウィンチ電動機の回生方向の最大トルクに等しいトルクに設定してもよい。
【0099】
また、上記第3実施形態において、モーメントリミッタによって導出された吊荷用ウィンチに掛かるロープ張力が前記設定値以下である場合には、コントローラは、吊荷用ウィンチ油圧モータを動力非出力状態にすることなく、具体的には、吊荷用の容量を0にすることなく、クラッチを切断状態にさせることによって吊荷用ウィンチ油圧モータから吊荷用ウィンチへ動力を供給させないようにしてもよい。
【0100】
また、上記各構成において、吊荷用ウィンチ油圧モータの容量を0にすることによって吊荷用ウィンチ油圧モータを動力非出力状態にしたが、これ以外の方法によって吊荷用ウィンチ油圧モータを動力非出力状態にしてもよい。例えば、吊荷用油圧ポンプが吐出する圧油を制御弁にタンクへ流させて吊荷用ウィンチ油圧モータへ圧油が供給されないようにして吊荷用ウィンチ油圧モータを動力非出力状態にしてもよい。この場合には、巻上側油路と巻下側油路が制御弁内で連通するように制御弁を構成するか又は制御弁の外部で巻上側油路と巻下側油路を連通させる連通手段を設けてもよい。
【0101】
また、上記バッテリ又は上記外部電源の代わりに、大容量バッテリもしくは燃料電池を用いてもよい。
【0102】
また、制御機構は、張力導出装置によって導出されたロープの張力が予め設定された設定値よりも大きい場合において、電動機が出力するトルクが操作レバーの操作量に応じたトルクとなるように電動機を制御する代わりに、電動機が一定のトルクを出力するようにその電動機を制御してもよく、また、電動機がエンジンの回転数に応じた大きさのトルクを出力するようにその電動機を制御してもよい。
【0103】
また、上記各実施形態では、吊荷用ウィンチの動作を制御するためのウィンチ動作制御装置に本発明を適用した例について説明したが、本発明はこのような適用例に限定されない。例えば、起伏部材を起伏させるための起伏用ウィンチの動作を制御するためのウィンチ動作制御装置に本発明を適用することが可能である。起伏部材としては、例えば、クレーンの本体(上部旋回体)に起伏自在となるように設けられたブームや、ブームの先端に起伏自在となるように設けられたジブ等が該当する。クレーンの本体には、ブームを後方から支持しながら起伏させるための起伏用ロープの巻き取り及び繰り出しを行うブーム起伏用ウィンチが設けられている。また、ブームの先端にジブが設けられている場合には、ジブを後方から支持しながら起伏させるための起伏用ロープの巻き取り及び繰り出しを行うジブ起伏用ウィンチがクレーンの本体に設けられている。そして、このような構成において、ブーム起伏用ウィンチの動作を制御するためのウィンチ動作制御装置及びジブ起伏用ウィンチの動作を制御するためのウィンチ動作制御装置がクレーンの本体に設けられ、それらのウィンチ動作制御装置の少なくとも一方に本発明を適用してもよい。すなわち、このようなウィンチ動作制御装置として、上記実施形態または上記変形例に係るウィンチ動作制御装置と実質的に同様の構成の制御装置を適用してもよい。具体的には、上記実施形態及び上記変形例における吊荷用ウィンチを起伏用ウィンチとし、吊りロープを起伏用ロープとし、吊荷用ウィンチ電動機及び吊荷用ウィンチ油圧モータを起伏用ウィンチを駆動するための動力を出力する起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータとすればよい。また、この場合には、上記吊荷の巻き上げを起伏部材を起立させる方向への当該起立部材の巻き上げと読み替え、上記吊荷の巻き下げを起伏部材を倒伏させる方向への当該起立部材の巻き下げと読み替えるものとする。
【0104】
この構成によれば、上記実施形態と同様の理由で、起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータを大型化することなく、起伏用ウィンチに高負荷が掛かるときにその起伏用ウィンチに高トルクを付与することができる。さらに、この構成によれば、上記実施形態と同様の理由で、起伏用ウィンチに掛かる負荷が低負荷から高負荷へ変化するときに、少なくとも起伏用ウィンチ電動機からのトルクは常に起伏用ウィンチに付与されるため、起伏部材の起伏時に起伏用ウィンチに与えられるトルクに抜けが生じるのを防ぐことができる。このため、先端が地面に当接した状態の起伏部材を地面から離れるように起立させるときに起伏用ウィンチに掛かる負荷が低負荷から高負荷となる場合でも、起伏用ウィンチに与えられるトルクに抜けが生じるのを防いで、起伏部材の起立速度が不連続になったり、起伏部材にショックが与えられたりするのを防ぐことができる。
【0105】
当該構成における上記以外の作用効果は、上記実施形態及び変形例で説明した作用効果における吊荷用ウィンチ、吊りロープ、吊荷用ウィンチ電動機及び吊荷用ウィンチ油圧モータを起伏用ウィンチ、起伏用ロープ、起伏用ウィンチ電動機及び起伏用ウィンチ油圧モータに置き換えた作用効果と同様である。
【符号の説明】
【0106】
1 ウィンチ動作制御装置
2 吊荷用ウィンチ電動機(電動機)
8 吊荷用ウィンチ油圧モータ(油圧モータ)
8a 出力軸
10 バッテリ(蓄電装置)
12 モーメントリミッタ(張力導出装置)
14 制御機構
24 コントローラ
40 クラッチ
50 吊荷用ウィンチ(ウィンチ)
50d 入力軸
58a 操作レバー
【特許請求の範囲】
【請求項1】
吊荷を吊るロープの巻き取り及び繰り出しを行ってその吊荷を昇降させるウィンチを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、
前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、
前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、
前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方から前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみから前記ウィンチへ動力を供給させて前記ウィンチを作動させる、クレーンのウィンチ動作制御装置。
【請求項2】
起伏自在となるように設けられた起伏部材と、その起伏部材を後方から支持しながら起伏させるためのロープの巻き取り及び繰り出しを行うウィンチとを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、
前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、
前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、
前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方から前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみから前記ウィンチへ動力を供給させて前記ウィンチを作動させる、クレーンのウィンチ動作制御装置。
【請求項3】
前記クレーンには、前記ウィンチを操作するための操作レバーが設けられ、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記電動機が出力するトルクが前記操作レバーの操作量に応じたトルクとなるように前記電動機の動作を制御するとともに、前記操作レバーの操作量に応じた流量の圧油を前記油圧モータに供給して前記油圧モータの回転数を制御することによって前記ウィンチの回転数を当該油圧モータの回転数に応じた回転数とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記電動機の回転数が前記操作レバーの操作量に応じた回転数となるように前記電動機の動作を制御するとともに前記油圧モータが作動しないようにして前記ウィンチの回転数を前記電動機の回転数に応じた回転数にする、請求項1又は2に記載のクレーンのウィンチ動作制御装置。
【請求項4】
前記電動機に電気的に接続され、前記ウィンチの回転速度が低下する時又は前記ウィンチが前記ロープを繰り出す時には前記電動機によって回生された電力を蓄え、前記ウィンチの回転速度を上昇させる時又は前記ウィンチが前記ロープを巻き取る時には蓄えた電力を前記電動機へ供給する蓄電装置をさらに備えた、請求項1〜3のいずれか1項に記載のクレーンのウィンチ動作制御装置。
【請求項5】
前記油圧モータは、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能であり、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータを前記動力出力状態にさせ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータを前記動力非出力状態にさせる、請求項1〜4のいずれか1項に記載のクレーンのウィンチ動作制御装置。
【請求項6】
前記油圧モータは、可変容量型であり、
前記制御機構は、前記油圧モータの容量を制御するコントローラを含み、
前記コントローラは、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータの容量を所定の容量にすることによって前記油圧モータを前記動力出力状態とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータの容量を0にすることによって前記油圧モータを前記動力非出力状態とする、請求項5に記載のクレーンのウィンチ動作制御装置。
【請求項7】
前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、
前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、
前記ウィンチ動作制御装置は、前記油圧モータの前記出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態と、前記油圧モータの前記出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態とに切り換わるクラッチをさらに備え、
前記制御機構は、前記クラッチを前記接続状態と前記切断状態とに切換制御するコントローラを含み、
前記コントローラは、前記油圧モータを前記動力出力状態とするときには前記クラッチを前記接続状態にさせる一方、前記油圧モータを前記動力非出力状態とするときには前記クラッチを前記切断状態にさせる、請求項5に記載のクレーンのウィンチ動作制御装置。
【請求項8】
前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、
前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、
前記ウィンチ動作制御装置は、前記油圧モータが前記動力出力状態となって前記出力軸が回転するときにはその出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態になり、前記油圧モータが前記動力非出力状態となって前記出力軸が回転しないときにはその出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態になるワンウェイクラッチをさらに備える、請求項5又は6に記載のクレーンのウィンチ動作制御装置。
【請求項1】
吊荷を吊るロープの巻き取り及び繰り出しを行ってその吊荷を昇降させるウィンチを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、
前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、
前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、
前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方から前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみから前記ウィンチへ動力を供給させて前記ウィンチを作動させる、クレーンのウィンチ動作制御装置。
【請求項2】
起伏自在となるように設けられた起伏部材と、その起伏部材を後方から支持しながら起伏させるためのロープの巻き取り及び繰り出しを行うウィンチとを備えたクレーンに設けられ、前記ウィンチの動作を制御するためのウィンチ動作制御装置であって、
前記ウィンチを駆動するための動力を出力する電動機及び油圧モータと、
前記ウィンチに掛かる前記ロープの張力を導出する張力導出装置と、
前記電動機の動作と前記油圧モータの動作を制御する制御機構とを備え、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が予め設定された設定値よりも大きい場合には、前記電動機と前記油圧モータの両方から前記ウィンチへ動力を供給させて前記ウィンチを作動させ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータから前記ウィンチに動力を供給させず、前記電動機のみから前記ウィンチへ動力を供給させて前記ウィンチを作動させる、クレーンのウィンチ動作制御装置。
【請求項3】
前記クレーンには、前記ウィンチを操作するための操作レバーが設けられ、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記電動機が出力するトルクが前記操作レバーの操作量に応じたトルクとなるように前記電動機の動作を制御するとともに、前記操作レバーの操作量に応じた流量の圧油を前記油圧モータに供給して前記油圧モータの回転数を制御することによって前記ウィンチの回転数を当該油圧モータの回転数に応じた回転数とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記電動機の回転数が前記操作レバーの操作量に応じた回転数となるように前記電動機の動作を制御するとともに前記油圧モータが作動しないようにして前記ウィンチの回転数を前記電動機の回転数に応じた回転数にする、請求項1又は2に記載のクレーンのウィンチ動作制御装置。
【請求項4】
前記電動機に電気的に接続され、前記ウィンチの回転速度が低下する時又は前記ウィンチが前記ロープを繰り出す時には前記電動機によって回生された電力を蓄え、前記ウィンチの回転速度を上昇させる時又は前記ウィンチが前記ロープを巻き取る時には蓄えた電力を前記電動機へ供給する蓄電装置をさらに備えた、請求項1〜3のいずれか1項に記載のクレーンのウィンチ動作制御装置。
【請求項5】
前記油圧モータは、動力を出力する動力出力状態と動力を出力しない動力非出力状態とに切り換え可能であり、
前記制御機構は、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータを前記動力出力状態にさせ、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータを前記動力非出力状態にさせる、請求項1〜4のいずれか1項に記載のクレーンのウィンチ動作制御装置。
【請求項6】
前記油圧モータは、可変容量型であり、
前記制御機構は、前記油圧モータの容量を制御するコントローラを含み、
前記コントローラは、前記張力導出装置によって導出された前記ロープの張力が前記設定値よりも大きい場合には、前記油圧モータの容量を所定の容量にすることによって前記油圧モータを前記動力出力状態とし、前記張力導出装置によって導出された前記ロープの張力が前記設定値以下である場合には、前記油圧モータの容量を0にすることによって前記油圧モータを前記動力非出力状態とする、請求項5に記載のクレーンのウィンチ動作制御装置。
【請求項7】
前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、
前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、
前記ウィンチ動作制御装置は、前記油圧モータの前記出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態と、前記油圧モータの前記出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態とに切り換わるクラッチをさらに備え、
前記制御機構は、前記クラッチを前記接続状態と前記切断状態とに切換制御するコントローラを含み、
前記コントローラは、前記油圧モータを前記動力出力状態とするときには前記クラッチを前記接続状態にさせる一方、前記油圧モータを前記動力非出力状態とするときには前記クラッチを前記切断状態にさせる、請求項5に記載のクレーンのウィンチ動作制御装置。
【請求項8】
前記油圧モータは、当該油圧モータから動力を出力するための出力軸を有し、
前記ウィンチは、前記油圧モータから出力される動力が入力される入力軸を有し、
前記ウィンチ動作制御装置は、前記油圧モータが前記動力出力状態となって前記出力軸が回転するときにはその出力軸と前記ウィンチの前記入力軸とが一体的に回転するようにその出力軸と入力軸を互いに連結する接続状態になり、前記油圧モータが前記動力非出力状態となって前記出力軸が回転しないときにはその出力軸に対して前記ウィンチの前記入力軸が相対的に回転可能となるようにその出力軸と入力軸とを切り離す切断状態になるワンウェイクラッチをさらに備える、請求項5又は6に記載のクレーンのウィンチ動作制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−71823(P2013−71823A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212824(P2011−212824)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
[ Back to top ]