
クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置

【課題】振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出し、各種パラメータ調整が容易で高精度に振れ止め制御を行う。
【解決手段】クレーン制御装置は、トロリーを駆動する走行モータの駆動力を制御装置に入力し、制御装置が所定の状態方程式から求められたオブザーバに基づいて、ロープの振れ速度推定値、振れ位置推定値及び外乱推定値を求める。制御装置が走行モータの速度操作指令信号を出力し、レギュレータにより速度操作指令信号からトロリーの速度、振れ速度推定値及び振れ位置推定値をそれぞれ調整した値を減算することによりトロリーの目標駆動力を求め、これを走行モータのトルク操作指令信号に変換すると共に、この信号から、外乱推定値から求められたトルク成分をキャンセルして走行モータのトルク指令信号を算出しこれによって走行モータをトルク制御する。
【解決手段】クレーン制御装置は、トロリーを駆動する走行モータの駆動力を制御装置に入力し、制御装置が所定の状態方程式から求められたオブザーバに基づいて、ロープの振れ速度推定値、振れ位置推定値及び外乱推定値を求める。制御装置が走行モータの速度操作指令信号を出力し、レギュレータにより速度操作指令信号からトロリーの速度、振れ速度推定値及び振れ位置推定値をそれぞれ調整した値を減算することによりトロリーの目標駆動力を求め、これを走行モータのトルク操作指令信号に変換すると共に、この信号から、外乱推定値から求められたトルク成分をキャンセルして走行モータのトルク指令信号を算出しこれによって走行モータをトルク制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、アンローダや天井クレーン、グラブバケット等の運転時の振れを制御するためのクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置に関する。
【背景技術】
【0002】
従来より、吊荷をロープで吊り上げて搬送するクレーンの振れを止めるための振れ止め制御技術として、例えば(1)振れ角情報を用いないオープンループ制御や、(2)振れ角情報を用いるフィードバック制御が行われている。このうち、上記(2)については、例えば(a)振れ角の検出器を用いるものと、(b)振れ角の検出器を用いずにオブザーバ理論によって振れ角を推定するものとが知られている。
【0003】
そして、上記(2)の(b)に該当するものとして、例えば下記特許文献1及び2に開示されているものが知られている。特許文献1に開示のものは、負荷トルクオブザーバにより、振れ角推定演算値及びダンピング補償信号を速度パターン発生回路が創出した速度指令信号から差し引いた値を速度制御装置の入力とすることで、振れ止め制御を行っている。
【0004】
また、特許文献2に開示のものは、負荷トルクの変動を含まない電動機トルク推定信号と実際の負荷トルクとを比較して、振れ角推定値を演算し、この演算された振れ角推定値と振れ角設定値との偏差に補償を行った速度により、振れ止め制御を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/094190号公報
【特許文献2】特開平8−295486号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に開示のものでは、制御系にトルク指令フィルタ等を設けることによって、振動を抑える演算をしているため、振れの応答が遅くなるという問題がある。また、制御のセットアップが容易と謳われているが、クレーン等のロープの長さや吊荷荷重などが変化する場合は、ダンピング係数の決定は決して容易ではなくなってしまうという問題もある。
【0007】
更に、上記特許文献2に開示のものでは、定数の設定により、速度制御のマイナーループが発振する可能性があり、制御定数のセットアップが容易とはいえないという問題がある。そして、これら特許文献1及び2共に、実際にクレーンを動作させる場合に、推定のパラメータを調整するか或いは振れ止めの制御パラメータを調整するかの判断がつかず、振れ止めの最適な設定が不明で、クレーン等の停止時間が長くなってしまうという問題が発生するおそれがある。なお、これら特許文献1及び2に開示されたもので上述した各種パラメータを調整するためには、オペレータの経験や勘に頼らざるを得ないのが現状である。
【0008】
この発明は、上記事情に鑑みてなされたもので、振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出することができると共に、各種パラメータ調整が容易で高精度にクレーンの振れ止め制御を行うことができるクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するため、この発明に係るクレーン振れ角検出方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記求められたロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定することを特徴とする。
【0010】
前記状態方程式は、例えば下記数1で表され、前記オブザーバは、例えば下記数2で表される。
【0011】
[数1]

ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0012】
[数2]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【0013】
また、この発明に係る第1のクレーン振れ止め制御方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記制御装置が、前記走行モータの速度パターン演算式に基づいて速度操作指令信号rpmrを出力し、レギュレータにより、前記速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出し、この算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とする。
【0014】
前記状態方程式は、例えば下記数3で表され、前記オブザーバは、例えば下記数4で表され、前記レギュレータは、例えば下記数5で表される。
【0015】
[数3]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0016】
[数4]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【0017】
[数5]
ただし、下記式
は、下記のように表され、
d/dt・xA=A1xA+B1u+D−E
=A1xA+B1u
且つ、
xC:状態変数、xC=[d/dt・x1,x2^,d/dt・x2^]T
ur:目標値、ur=[d/dt・x1r,0,0]T、
F:フィードバックゲイン、F=[f1,f2,f3]
である。
【0018】
また、この発明に係る第2のクレーン振れ止め制御方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求め、前記制御装置が、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出し、前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御することを特徴とする。
【0019】
前記状態方程式は、例えば下記数6で表され、前記オブザーバは、例えば下記数7で表される。
【0020】
[数6]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0021】
[数7]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
KはゲインベクトルK=[k1,k2,k3,k4]Tである。
【0022】
この発明に係るクレーン振れ角検出装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、このオブザーバ演算器により求められた前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する振れ角検出手段とを備えたことを特徴とする。
【0023】
この発明に係る第1のクレーン振れ止め制御装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、前記走行モータの速度パターン演算式に基づく速度操作指令信号rpmrを入力し、この速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出する演算手段と、を備え、前記算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とする。
【0024】
この発明に係る第2のクレーン振れ止め制御装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求めるオブザーバ演算器と、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出する演算手段と、前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する制御手段とを備えたことを特徴とする。
【発明の効果】
【0025】
本発明によれば、振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出することができると共に、各種パラメータ調整が容易で高精度にクレーンの振れ止め制御を行うことができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施形態に係るクレーン振れ角検出方法におけるクレーンのトロリー・振れ角のモデルを示す図である。
【図2】本発明の一実施形態に係るクレーン振れ角検出装置によるシミュレーション結果を示す図である。
【図3】本発明の第1の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。
【図4】同クレーン制御装置の振れ止め制御部を示すブロック図である。
【図5】同振れ止め制御部におけるオブザーバ演算器を示す図である。
【図6】同クレーン制御装置によるシミュレーション結果を示す図である。
【図7】本発明の第2の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。
【図8】同クレーン制御装置の詳細ブロック図である。
【図9】同クレーン制御装置の振れ抑制速度演算処理を示すフローチャートである。
【図10】同クレーン制御装置によるシミュレーション結果を示す図である。
【発明を実施するための形態】
【0027】
以下に、添付の図面を参照して、この発明に係るクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置の実施の形態を詳細に説明する。
【0028】
[クレーン振れ角検出方法]
まず、クレーン振れ角検出方法について説明する。
図1は、クレーンのトロリー・振れ角のモデルを示す図である。
【0029】
図1に示すように、一般的なクレーンのトロリー・振れ角のモデルは、例えばトロリー1の質量をM1、トロリー1の位置をx1、長さLのロープ2によりトロリー1に吊り上げられた吊荷3の質量をM2、ロープ2の振れ角をθ、ロープ2の振れ位置(吊荷3の位置)をx2及びトロリー1の駆動力をfcとすると、図1(a)及び(b)に示すように表される。
【0030】
トロリー系及び吊荷系の運動方程式は、それぞれ下記数8のように表すことができる。
[数8]
ここで、δは摩擦抵抗を含む外乱である。振れ角θが小さいとして、θ=x2/Lとおき、トロリー1の駆動力fcを制御入力uとすると、このトロリー1及びロープ2の振れに関する簡易モデルの状態方程式は、下記数9のように示すことができる。
【0031】
[数9]
【0032】
ここで外乱δを定数と仮定し、これを状態変数とすれば、上記数9を下記数10に置き換えることができる。
【0033】
[数10]
【0034】
一方、測定出力であるトロリー1の速度d/dt・x1は、下記数11のように表すことができる。
【0035】
[数11]
【0036】
従って、オブザーバである推定値xB^(t)は、下記数12のような状態方程式で表すことができる。
【0037】
[数12]
【0038】
ただし、KはゲインベクトルK=[k1,k2,k3,k4]Tである。そして、xB^(t)→xB(t)の誤差ベクトルを、e(t)=xB^(t)−xB(t)とおくと、上記数10、数11及び数12より、下記数13が求められる。
【0039】
[数13]
【0040】
その解は、下記数14となる。
【0041】
[数14]
【0042】
従って、A2−KCが安定行列にできれば、推定値xB^(t)→xB(t)となるので、推定値xB^(t)はxB(t)の漸近的再現値となる。ここで、A2−KCの固有値はオブザーバの極であるので、複素左半面のより左側に設定できれば、より速くxB^(t)→xB(t)とすることができる。また、オブザーバの極を重根αとすれば、上記ゲインベクトルKを下記数15で演算することができる。
【0043】
[数15]
【0044】
従って、ゲインベクトルKの調整を、オブザーバの極のみの設定で行うことができるので、容易に各種パラメータの調整を行うことができるようになる。なお、トロリー1の質量M1と重力加速度g(9.80665m/s2)は既知の値であるが、吊荷3の質量M2とロープ2の長さLは変動する値である。ただし、これら吊荷3の質量M2とロープ2の長さL共にシステム上は安価に測定可能であるため、これらの測定値を用いれば、モデルと実機との誤差による推定誤差はほとんど存在しなくなるといえる。
【0045】
そして、上記数12のオブザーバの微分方程式を解くことにより、ロープ2の振れ速度d/dt・x2、ロープ2の振れ位置x2、及び外乱δのそれぞれを推定したロープ2の振れ速度推定値d/dt・x2^、ロープ2の振れ位置推定値x2^、及び外乱推定値δ^を得ることができる。こうして得られたロープ2の振れ位置推定値x2^により、ロープ2の振れ角度θを、θ=x2^/Lにより推定することができる。
【0046】
このように、クレーン振れ角検出装置は、オブザーバによって摩擦係数や振れの各種成分を含む外乱δを定数として外乱推定値δ^を得ると共にロープ2の振れ速度推定値d/dt・x2^や振れ位置推定値x2^を得る。これにより、振れ角検出器や複雑な演算、或いはゲイン調整などを不要としながらも、ロープ2の振れ角度θを推定することで、安価に吊荷3の振れ角度を検出することができる。
【0047】
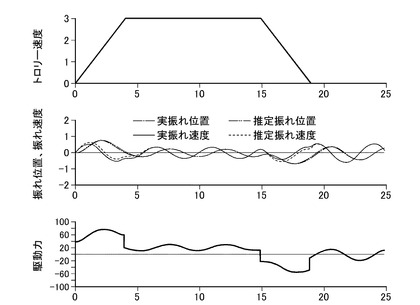
なお、クレーン振れ角検出装置によるシミュレーション結果は、図2に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。従って、各種パラメータ調整が容易であると共に高精度にクレーンの振れ角を検出できるといえる。
【0048】
[第1の実施形態]
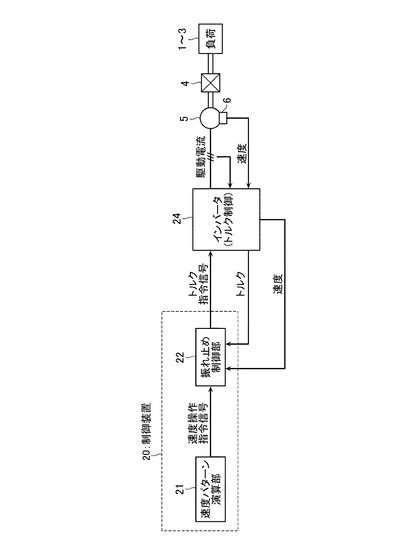
図3は、本発明の第1の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。この実施形態は、インバータ24をトルク制御する制御装置の例を示している。
図3に示すように、クレーン振れ止め制御装置の制御対象である負荷(トロリー1、ロープ2及び吊荷3)は、減速機4を介してトロリー1を駆動する走行モータ5の動作によって制御される。走行モータ5には、トロリー1の速度y=d/dt・x1を検出し出力するエンコーダ6が備えられている。制御装置20は、コンピュータ及び必要な記憶装置、周辺機器等により構成され、速度パターン演算部21及び振れ止め制御部22を備えている。速度パターン演算部21は、内部に走行モータ5の回転数を決定する速度パターン演算式を記憶し、この速度パターン演算式により速度操作指令信号rpmrを算出し出力する。振れ止め制御部22は、速度パターン演算部21から出力される速度操作指令信号と、インバータ24からフィードバックされる速度及びトルク指令値(制御入力u)の情報に基づいて、振れ止め制御を含むトルク指令信号Tcmdを出力する。インバータ24は、トルク指令信号Tcmdを入力し、モータ5に制御入力u(トルク指令値)を出力する。
【0049】
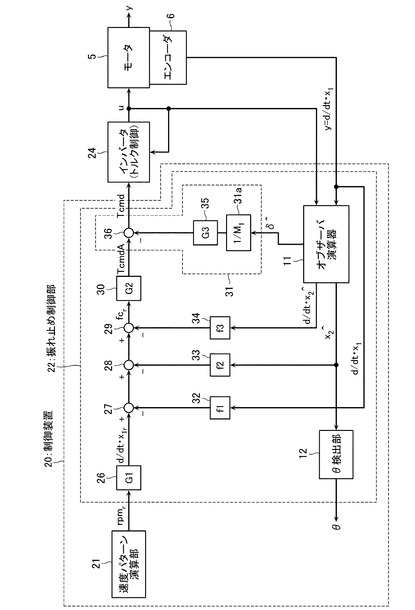
図4は、振れ止め制御部22の詳細ブロック図である。図5は、この振れ止め制御部22におけるオブザーバ演算器11を示す図である。図6は、本実施形態のクレーン制御装置によるシミュレーション結果を示す図である。なお、以降において、既に説明した部分と重複する箇所には同一の符号を附して説明を省略することがある。
【0050】
図4に示すように、振れ止め制御部22は、オブザーバ演算器11を備える。速度パターン演算部21により算出された走行モータ5の目標回転数を示す速度操作指令信号rpmrは、回転数/速度変換器26によってトロリー1の目標速度d/dt・x1rに変換される。
【0051】
一方、制御対象である走行モータ5に入力される制御入力uは、走行モータ5のトルクTを示し、インバータ24に戻されると共に振れ止め制御部22のオブザーバ演算器11に入力される。また、エンコーダ6から出力される測定出力yであるトロリー1の速度d/dt・x1もオブザーバ演算器11に入力される。
【0052】
クレーンの振れ止めにおいては、例えばレギュレータ理論により閉ループシステムの固有値を複素左半面の左側に設定できれば安定化することができる。また、図4に示すようなサーボシステムの設計を行うことで、目標値追従制御を行うことが可能となる。レギュレータ理論の場合は、上記数9の状態方程式のDの項が邪魔になるため、制御入力uに外乱δをキャンセルする外乱キャンセラのEの項を追加することによりD項を削除する。これにより、上記数9を下記数16に置き換えることができる。
【0053】
[数16]
【0054】
外乱キャンセラのEの項には、オブザーバ演算器11により推定された外乱推定値δ^を用いることができる。この結果、上記数16は下記数17とすることができる。
【0055】
[数17]
【0056】
従って、上記数17を用いてトロリー1の速度d/dt・x1、ロープ2の振れ位置x2、ロープ2の振れ速度d/dt・x2をフィードバックすれば、閉ループシステムの固有値を任意な複素左半面の左側に設置することができ、安定化させることが可能となる。このシステムにおいて、ロープ2の振れ位置x2及び振れ速度d/dt・x2は測定不可能な値であるため、オブザーバ演算器11により推定したロープ2の振れ位置推定値x2^及びロープ2の振れ速度推定値d/dt・x2^を利用する。
【0057】
上記外乱キャンセラによって状態方程式を上記数17とすることができるので、サーボシステムを図4に示すように構成することができる。
ここで、目標値をur=[d/dt・x1r,0,0]Tとし、測定出力をy(t)=[1,0,0]xCとし、状態変数をxC=[d/dt・x1,x2^,d/dt・x2^]Tとする。そして、測定出力と目標制御入力との偏差e(t)=ur(t)−y(t)を制御信号とし、フィードバックゲインをF=[f1,f2,f3]とすれば、上記数9は下記数18となる。
【0058】
[数18]
【0059】
また、制御入力u(t)は、下記数19となる。
【0060】
[数19]
【0061】
従って、上記数18及び数19より、レギュレータは下記数20となり、
【0062】
[数20]
【0063】
その解は、下記数21となる。
【0064】
[数21]
【0065】
従って、A1−B1Fを安定行列にできれば、偏差e(t)=ur(t)−y(t)となるので、偏差e(t)→0に制御可能となり、目標値追従制御を行うことができる。具体的には、フィードバックゲインFを調整することにより、A1−B1Fを安定化することができる。
【0066】
なお、最適なフィードバック係数(f1,f2,f3)を求めることは、クレーン振れ止め制御において重要な課題である。一般的に、フィードバック係数はオペレータの経験や現地による調整により決定されているが、本発明に係るクレーン振れ止め制御装置では、上記数20で示すレギュレータの極を重根にして極βとすれば、下記数22により演算でフィードバック係数を求めることが可能となる。
【0067】
[数22]
【0068】
以上の理論を図4の振れ止め制御部22に適用すると、次のような構成が実現される。すなわち、測定出力yからのトロリー1の速度d/dt・x1は、オブザーバ演算器11に入力される他、調節器32に入力される。トロリー1の速度d/dt・x1は、調節器32にて所定のフィードバックゲインf1を用いて調節された上で、加算器27において回転数/速度変換器26からのトロリー1の目標速度d/dt・x1rから減算される。この値は、次段の加算器28に出力される。
【0069】
また、オブザーバ演算器11からのロープ2の振れ位置推定値x2^は、調節器33に入力され、所定のフィードバックゲインf2を用いて調節された上で、加算器28において上記値から減算される。この値は、次段の加算器29に出力される。更に、オブザーバ演算器11からのロープ2の振れ速度推定値d/dt・x2^は、調節器34に入力され、所定のフィードバックゲインf3を用いて調節された上で、加算器29において上記値から減算される。
【0070】
これにより、加算器29からはトロリー1の目標駆動力fcrが出力され、この目標駆動力fcrは、力/トルク変換器30によって走行モータ5のトルク操作指令信号TcmdAに変換される。なお、オブザーバ演算器11からの外乱推定値δ^は、外乱キャンセラ31においてキャンセルされる。すなわち、外乱推定値δ^は、調整器31aにて係数1/M1を乗算された上で、力/トルク変換器35にてトルクに変換される。
【0071】
こうして変換されたトルクを、加算器36においてトルク操作指令信号TcmdAから減算することにより外乱をキャンセルして、インバータ24へのトルク指令信号Tcmdが得られる。そして、インバータ24は、このトルク指令信号Tcmdに基づき走行モータ5をトルク指令値(制御入力u)によりトルク制御するようになっている。
【0072】
ここで、上述したように、トロリー1の質量M1と重力加速度gは既知の値であるが、負荷3の質量M2とロープ2の長さLは変動する値であるので、上述したオブザーバと同様に測定可能とすれば、目標を安定化する極を得ることが可能となる。
【0073】
次に、図5を参照して、オブザーバ演算器11の具体的構成について説明する。このオブザーバ演算器11は、上述した数12の演算を行って推定値xB^を求める回路である。
図5に示すように、オブザーバ演算器11に入力された制御入力uは、演算器41にて係数1/M1を乗算されて制御入力成分u/M1とされる。加算器51は、検出されたトロリー1の速度d/dt・x1から積分器42から出力されたトロリー1の推定速度d/dt・x1^を減算する。この減算値は、調節器61,62,63,64においてゲインベクトルKの各係数k1,k2,k3,k4によってそれぞれゲイン調整される。
【0074】
調整器61で係数k1によってゲイン調整された出力は、加算器52で演算器41からの制御入力成分u/M1を加算され、加算器53で演算器44からの外乱推定値成分δ^/M1を減算され、加算器54で演算器43からの振れ速度推定値成分M2g/M1L・d/dt・x2^を減算された後、積分器42により積分される。これにより、積分器42でトロリー速度推定値d/dt・x1^が求められ、その結果は、加算器51にフィードバックされる。
【0075】
調節器62で係数k2によってゲイン調整された出力は、加算器58で積分器45から出力されたロープ2の振れ速度推定値d/dt・x2^を加算された後、積分器47で積分される。これにより、積分器47でロープ2の振れ位置推定値x2^が求められ、その結果が外部に出力されると共に加算器58にフィードバックされる。
【0076】
調節器63で係数k3によってゲイン調整された出力は、加算器55で演算器41からの制御入力成分u/M1を加算され、加算器56で演算器44からの外乱推定値成分δ^/M1を減算され、加算器57で演算器46からの振れ速度推定値成分(M1+M2)g/M1L・d/dt・x2^を減算された後、積分器45により積分される。これにより、積分器45でロープ2の振れ速度推定値d/dt・x2^が求められ、その結果は、外部に出力されると共に、加算器58にフィードバックされる。
【0077】
また、調節器64で係数k4によってゲイン調整された出力は、積分器48により積分される。これにより、積分器48で外乱推定値δ^が求められ、求められた外乱推定値δ^は、外部に出力されると共に、演算器44にフィードバックされる。
【0078】
このように、第1の実施形態に係るクレーン制御装置における振れ止め制御装置は、オブザーバによって外乱推定値δ^、ロープ2の振れ速度推定値d/dt・x2^、及び振れ位置推定値x2^を得ると共に、レギュレータによって目標の安定化を図ることができる。このため、振れ角検出器や複雑な演算、或いはゲイン調整などを不要としながらも、ロープ2の振れ角度θを推定して検出し、これに基づきトロリー1を駆動する走行モータ5の動作をトルク制御により制御することで、クレーンの振れを止めることができる。
【0079】
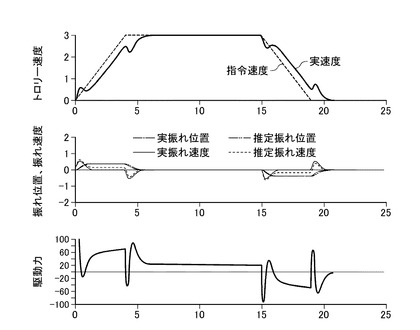
なお、第1の実施形態に係るクレーン制御装置によるシミュレーション結果は、図6に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。また、トロリー1の動作開始時及び動作停止時にロープ2の振れが収束していることが判明した。従って、各種パラメータ調整が容易であると共に高精度にクレーンの振れを止めることができるといえる。
【0080】
[第2の実施形態]
図7は、本発明の第2の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。図8は、この制御装置の詳細ブロック図である。図9は、この制御装置の振れ抑制速度演算処理を示すフローチャートである。図10は、このクレーン制御装置によるシミュレーション結果を示す図である。
【0081】
上述した第1の実施形態では、トルク指令信号をインバータに与えるトルク制御方式であったが、この第2の実施形態では、インバータに速度指令信号を与え、インバータ内部で速度・トルク制御を行うクレーン制御装置におけるクレーン振れ止め制御装置の例を示している。この方式は、既設のシステムに組み込むのが容易な構成となっている。すなわち、一般的なクレーンの速度制御は、制御装置から速度指令信号をインバータ等に出力し、インバータ内部で速度・トルク制御を行う構成となっている。
【0082】
従って、第2の実施形態のクレーン振れ止め制御装置による制御方式は、一般的なクレーン振れ止め制御装置に組み込んでクレーンの振れを制御するために、既存の制御装置の大幅な変更が不要であるという利点がある。
【0083】
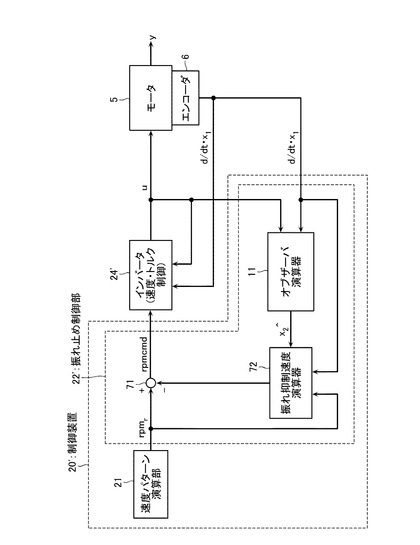
図7に示すように、インバータ24’により速度・トルク制御で走行モータ5を駆動する場合、制御装置20’は、速度パターン演算部21により速度操作指令信号を算出すると共に、振れ止め制御部22’において上述した振れ角度θを利用して振れ抑制速度指令信号を算出する。そして、走行モータ5の速度指令信号を求め、これをインバータ24’に出力する。
【0084】
ただし、ロープ2の振れ位置推定値x2^等の演算結果を速度指令信号に加える場合は、トロリー1の速度制御に影響を与えるため、各種パラメータの設定が非常に困難なものとなる。そこで、第2のクレーン振れ止め制御装置では、トロリー1を減速する場合のみに振れ止め制御を行うこととした。
【0085】
図7に示したクレーン振れ止め制御装置の制御回路における制御構成の詳細は、例えば図8に示すようになる。速度パターン演算部21により算出された速度操作指令信号rpmrは、加算器71に入力されると共に振れ抑制速度演算器72に入力される。
【0086】
一方、制御対象である走行モータ5に入力される制御入力uは、走行モータ5のトルクTを示し、インバータ24’に戻されると共に振れ止め制御部22’のオブザーバ演算器11に入力される。また、エンコーダ6から出力される測定出力yとしてのトロリー1の速度d/dt・x1は、インバータ24’に戻されると共に、オブザーバ演算器11及び振れ抑制速度演算器72にそれぞれ入力される。
【0087】
更に、オブザーバ演算器11からのロープ2の振れ位置推定値x2^は、振れ抑制速度演算器72に入力される。振れ抑制速度演算器72は、これらの入力に基づいて、振れ抑制速度指令信号を演算し、加算器71に出力する。加算器71においては、速度操作指令信号rpmrからこの振れ抑制速度指令信号を減算することによって、速度指令信号rpmcmdが算出される。インバータ24’は、この速度指令信号rpmcmdに基づき走行モータ5の速度・トルク制御を行う。
【0088】
従って、第2のクレーン振れ止め制御装置では、オブザーバ演算器11により得られたロープ2の振れ位置推定値x2^(振れ角度θ)のみを用いてクレーンの振れ止め制御を行うことができる。なお、速度指令信号rpmcmdの演算処理は、例えば次に示すようなものとなる。
【0089】
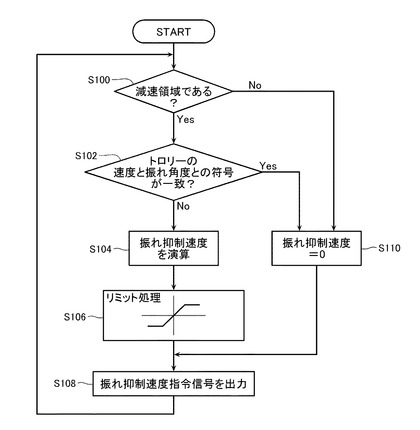
すなわち、図9に示すように、振れ抑制速度演算器72は、速度操作指令信号rpmrとトロリー1の速度d/dt・x1とに基づいて、トロリー1の減速を示す減速領域であるか否かを判断する(ステップS100)。減速領域であると判断した場合(ステップS100のYes)は、トロリー1の速度d/dt・x1と振れ角度θとの符号が一致するか否かを判断する(ステップS102)。
【0090】
これらの符号が一致しないと判断した場合(ステップS102のNo)は、ロープ2の振れ位置推定値x2^と図示しない補償係数とを用いて、振れ抑制速度を演算により求める(ステップS104)。そして、振れの発散を防止するために、振れ抑制速度にリミット処理を施し(ステップS106)、振れ抑制速度指令信号を算出し、算出した振れ抑制速度指令信号出力して(ステップS108)、上記ステップS100に移行し以降の処理を繰り返す。
【0091】
なお、補償係数は、求められる振れ抑制速度が、トロリー1の速度d/dt・x1の1ノッチ程度の速度となるように調整されると良い。例えば、実際の熟練のクレーンオペレータは、ロープ2の振れ角度θによって振れ方向にトロリー1を移動させてロープ2の振れを止めるといういわゆる追いノッチ操作を行っている。
【0092】
加算器71においては、速度操作指令信号rpmrから振れ抑制速度演算器72より出力された振れ抑制速度指令信号を減算することによって、速度指令信号rpmcmdが算出される。なお、上記ステップS100にて減速領域でないと判断した場合(ステップS100のNo)、及び上記ステップS102にて符号が一致すると判断した場合(ステップS102のYes)は、振れ抑制速度を0として(ステップS110)、上記ステップS108に移行する。
【0093】
このように得られた速度指令信号rpmcmdを用いたクレーンの振れ止め制御は、トロリー1が、例えば図1(b)に示す状態においてその速度d/dt・x1と振れ角度θとの符号が一致しない場合に行われる。これにより、トロリー1の減速時に、走行モータ5の動作を速度制御により制御して、クレーンの振れを容易に止めることが可能となる。
【0094】
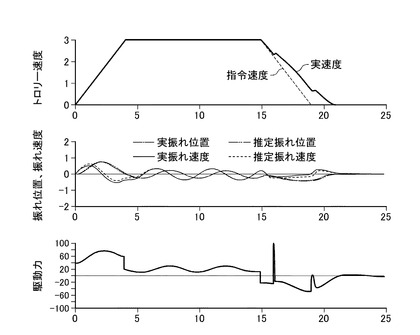
なお、第2のクレーン振れ止め制御装置によるシミュレーション結果は、図10に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。また、トロリー1の動作停止時にロープ2の振れが収束していることが判明した。従って、簡単且つ安価な構成で既設のシステムに適用できて高精度且つ確実にクレーンの振れを止めることができる。
【符号の説明】
【0095】
1 トロリー
2 ロープ
3 吊荷
4 減速機
5 走行モータ
6 エンコーダ
11 オブザーバ演算器
12 検出部
21 速度パターン演算部
22 振れ止め制御部
24 インバータ
26 回転数/速度変換器
27〜29 加算器
30 力/トルク変換器
31 外乱キャンセラ
32〜34 調節器
35 力/トルク変換器
36 加算器
【技術分野】
【0001】
この発明は、アンローダや天井クレーン、グラブバケット等の運転時の振れを制御するためのクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置に関する。
【背景技術】
【0002】
従来より、吊荷をロープで吊り上げて搬送するクレーンの振れを止めるための振れ止め制御技術として、例えば(1)振れ角情報を用いないオープンループ制御や、(2)振れ角情報を用いるフィードバック制御が行われている。このうち、上記(2)については、例えば(a)振れ角の検出器を用いるものと、(b)振れ角の検出器を用いずにオブザーバ理論によって振れ角を推定するものとが知られている。
【0003】
そして、上記(2)の(b)に該当するものとして、例えば下記特許文献1及び2に開示されているものが知られている。特許文献1に開示のものは、負荷トルクオブザーバにより、振れ角推定演算値及びダンピング補償信号を速度パターン発生回路が創出した速度指令信号から差し引いた値を速度制御装置の入力とすることで、振れ止め制御を行っている。
【0004】
また、特許文献2に開示のものは、負荷トルクの変動を含まない電動機トルク推定信号と実際の負荷トルクとを比較して、振れ角推定値を演算し、この演算された振れ角推定値と振れ角設定値との偏差に補償を行った速度により、振れ止め制御を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/094190号公報
【特許文献2】特開平8−295486号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に開示のものでは、制御系にトルク指令フィルタ等を設けることによって、振動を抑える演算をしているため、振れの応答が遅くなるという問題がある。また、制御のセットアップが容易と謳われているが、クレーン等のロープの長さや吊荷荷重などが変化する場合は、ダンピング係数の決定は決して容易ではなくなってしまうという問題もある。
【0007】
更に、上記特許文献2に開示のものでは、定数の設定により、速度制御のマイナーループが発振する可能性があり、制御定数のセットアップが容易とはいえないという問題がある。そして、これら特許文献1及び2共に、実際にクレーンを動作させる場合に、推定のパラメータを調整するか或いは振れ止めの制御パラメータを調整するかの判断がつかず、振れ止めの最適な設定が不明で、クレーン等の停止時間が長くなってしまうという問題が発生するおそれがある。なお、これら特許文献1及び2に開示されたもので上述した各種パラメータを調整するためには、オペレータの経験や勘に頼らざるを得ないのが現状である。
【0008】
この発明は、上記事情に鑑みてなされたもので、振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出することができると共に、各種パラメータ調整が容易で高精度にクレーンの振れ止め制御を行うことができるクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するため、この発明に係るクレーン振れ角検出方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記求められたロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定することを特徴とする。
【0010】
前記状態方程式は、例えば下記数1で表され、前記オブザーバは、例えば下記数2で表される。
【0011】
[数1]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0012】
[数2]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【0013】
また、この発明に係る第1のクレーン振れ止め制御方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記制御装置が、前記走行モータの速度パターン演算式に基づいて速度操作指令信号rpmrを出力し、レギュレータにより、前記速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出し、この算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とする。
【0014】
前記状態方程式は、例えば下記数3で表され、前記オブザーバは、例えば下記数4で表され、前記レギュレータは、例えば下記数5で表される。
【0015】
[数3]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0016】
[数4]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【0017】
[数5]
ただし、下記式
は、下記のように表され、
d/dt・xA=A1xA+B1u+D−E
=A1xA+B1u
且つ、
xC:状態変数、xC=[d/dt・x1,x2^,d/dt・x2^]T
ur:目標値、ur=[d/dt・x1r,0,0]T、
F:フィードバックゲイン、F=[f1,f2,f3]
である。
【0018】
また、この発明に係る第2のクレーン振れ止め制御方法は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求め、前記制御装置が、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出し、前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御することを特徴とする。
【0019】
前記状態方程式は、例えば下記数6で表され、前記オブザーバは、例えば下記数7で表される。
【0020】
[数6]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
【0021】
[数7]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
KはゲインベクトルK=[k1,k2,k3,k4]Tである。
【0022】
この発明に係るクレーン振れ角検出装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、このオブザーバ演算器により求められた前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する振れ角検出手段とを備えたことを特徴とする。
【0023】
この発明に係る第1のクレーン振れ止め制御装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、前記走行モータの速度パターン演算式に基づく速度操作指令信号rpmrを入力し、この速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出する演算手段と、を備え、前記算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とする。
【0024】
この発明に係る第2のクレーン振れ止め制御装置は、吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求めるオブザーバ演算器と、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出する演算手段と、前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する制御手段とを備えたことを特徴とする。
【発明の効果】
【0025】
本発明によれば、振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出することができると共に、各種パラメータ調整が容易で高精度にクレーンの振れ止め制御を行うことができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施形態に係るクレーン振れ角検出方法におけるクレーンのトロリー・振れ角のモデルを示す図である。
【図2】本発明の一実施形態に係るクレーン振れ角検出装置によるシミュレーション結果を示す図である。
【図3】本発明の第1の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。
【図4】同クレーン制御装置の振れ止め制御部を示すブロック図である。
【図5】同振れ止め制御部におけるオブザーバ演算器を示す図である。
【図6】同クレーン制御装置によるシミュレーション結果を示す図である。
【図7】本発明の第2の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。
【図8】同クレーン制御装置の詳細ブロック図である。
【図9】同クレーン制御装置の振れ抑制速度演算処理を示すフローチャートである。
【図10】同クレーン制御装置によるシミュレーション結果を示す図である。
【発明を実施するための形態】
【0027】
以下に、添付の図面を参照して、この発明に係るクレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置の実施の形態を詳細に説明する。
【0028】
[クレーン振れ角検出方法]
まず、クレーン振れ角検出方法について説明する。
図1は、クレーンのトロリー・振れ角のモデルを示す図である。
【0029】
図1に示すように、一般的なクレーンのトロリー・振れ角のモデルは、例えばトロリー1の質量をM1、トロリー1の位置をx1、長さLのロープ2によりトロリー1に吊り上げられた吊荷3の質量をM2、ロープ2の振れ角をθ、ロープ2の振れ位置(吊荷3の位置)をx2及びトロリー1の駆動力をfcとすると、図1(a)及び(b)に示すように表される。
【0030】
トロリー系及び吊荷系の運動方程式は、それぞれ下記数8のように表すことができる。
[数8]
ここで、δは摩擦抵抗を含む外乱である。振れ角θが小さいとして、θ=x2/Lとおき、トロリー1の駆動力fcを制御入力uとすると、このトロリー1及びロープ2の振れに関する簡易モデルの状態方程式は、下記数9のように示すことができる。
【0031】
[数9]
【0032】
ここで外乱δを定数と仮定し、これを状態変数とすれば、上記数9を下記数10に置き換えることができる。
【0033】
[数10]
【0034】
一方、測定出力であるトロリー1の速度d/dt・x1は、下記数11のように表すことができる。
【0035】
[数11]
【0036】
従って、オブザーバである推定値xB^(t)は、下記数12のような状態方程式で表すことができる。
【0037】
[数12]
【0038】
ただし、KはゲインベクトルK=[k1,k2,k3,k4]Tである。そして、xB^(t)→xB(t)の誤差ベクトルを、e(t)=xB^(t)−xB(t)とおくと、上記数10、数11及び数12より、下記数13が求められる。
【0039】
[数13]
【0040】
その解は、下記数14となる。
【0041】
[数14]
【0042】
従って、A2−KCが安定行列にできれば、推定値xB^(t)→xB(t)となるので、推定値xB^(t)はxB(t)の漸近的再現値となる。ここで、A2−KCの固有値はオブザーバの極であるので、複素左半面のより左側に設定できれば、より速くxB^(t)→xB(t)とすることができる。また、オブザーバの極を重根αとすれば、上記ゲインベクトルKを下記数15で演算することができる。
【0043】
[数15]
【0044】
従って、ゲインベクトルKの調整を、オブザーバの極のみの設定で行うことができるので、容易に各種パラメータの調整を行うことができるようになる。なお、トロリー1の質量M1と重力加速度g(9.80665m/s2)は既知の値であるが、吊荷3の質量M2とロープ2の長さLは変動する値である。ただし、これら吊荷3の質量M2とロープ2の長さL共にシステム上は安価に測定可能であるため、これらの測定値を用いれば、モデルと実機との誤差による推定誤差はほとんど存在しなくなるといえる。
【0045】
そして、上記数12のオブザーバの微分方程式を解くことにより、ロープ2の振れ速度d/dt・x2、ロープ2の振れ位置x2、及び外乱δのそれぞれを推定したロープ2の振れ速度推定値d/dt・x2^、ロープ2の振れ位置推定値x2^、及び外乱推定値δ^を得ることができる。こうして得られたロープ2の振れ位置推定値x2^により、ロープ2の振れ角度θを、θ=x2^/Lにより推定することができる。
【0046】
このように、クレーン振れ角検出装置は、オブザーバによって摩擦係数や振れの各種成分を含む外乱δを定数として外乱推定値δ^を得ると共にロープ2の振れ速度推定値d/dt・x2^や振れ位置推定値x2^を得る。これにより、振れ角検出器や複雑な演算、或いはゲイン調整などを不要としながらも、ロープ2の振れ角度θを推定することで、安価に吊荷3の振れ角度を検出することができる。
【0047】
なお、クレーン振れ角検出装置によるシミュレーション結果は、図2に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。従って、各種パラメータ調整が容易であると共に高精度にクレーンの振れ角を検出できるといえる。
【0048】
[第1の実施形態]
図3は、本発明の第1の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。この実施形態は、インバータ24をトルク制御する制御装置の例を示している。
図3に示すように、クレーン振れ止め制御装置の制御対象である負荷(トロリー1、ロープ2及び吊荷3)は、減速機4を介してトロリー1を駆動する走行モータ5の動作によって制御される。走行モータ5には、トロリー1の速度y=d/dt・x1を検出し出力するエンコーダ6が備えられている。制御装置20は、コンピュータ及び必要な記憶装置、周辺機器等により構成され、速度パターン演算部21及び振れ止め制御部22を備えている。速度パターン演算部21は、内部に走行モータ5の回転数を決定する速度パターン演算式を記憶し、この速度パターン演算式により速度操作指令信号rpmrを算出し出力する。振れ止め制御部22は、速度パターン演算部21から出力される速度操作指令信号と、インバータ24からフィードバックされる速度及びトルク指令値(制御入力u)の情報に基づいて、振れ止め制御を含むトルク指令信号Tcmdを出力する。インバータ24は、トルク指令信号Tcmdを入力し、モータ5に制御入力u(トルク指令値)を出力する。
【0049】
図4は、振れ止め制御部22の詳細ブロック図である。図5は、この振れ止め制御部22におけるオブザーバ演算器11を示す図である。図6は、本実施形態のクレーン制御装置によるシミュレーション結果を示す図である。なお、以降において、既に説明した部分と重複する箇所には同一の符号を附して説明を省略することがある。
【0050】
図4に示すように、振れ止め制御部22は、オブザーバ演算器11を備える。速度パターン演算部21により算出された走行モータ5の目標回転数を示す速度操作指令信号rpmrは、回転数/速度変換器26によってトロリー1の目標速度d/dt・x1rに変換される。
【0051】
一方、制御対象である走行モータ5に入力される制御入力uは、走行モータ5のトルクTを示し、インバータ24に戻されると共に振れ止め制御部22のオブザーバ演算器11に入力される。また、エンコーダ6から出力される測定出力yであるトロリー1の速度d/dt・x1もオブザーバ演算器11に入力される。
【0052】
クレーンの振れ止めにおいては、例えばレギュレータ理論により閉ループシステムの固有値を複素左半面の左側に設定できれば安定化することができる。また、図4に示すようなサーボシステムの設計を行うことで、目標値追従制御を行うことが可能となる。レギュレータ理論の場合は、上記数9の状態方程式のDの項が邪魔になるため、制御入力uに外乱δをキャンセルする外乱キャンセラのEの項を追加することによりD項を削除する。これにより、上記数9を下記数16に置き換えることができる。
【0053】
[数16]
【0054】
外乱キャンセラのEの項には、オブザーバ演算器11により推定された外乱推定値δ^を用いることができる。この結果、上記数16は下記数17とすることができる。
【0055】
[数17]
【0056】
従って、上記数17を用いてトロリー1の速度d/dt・x1、ロープ2の振れ位置x2、ロープ2の振れ速度d/dt・x2をフィードバックすれば、閉ループシステムの固有値を任意な複素左半面の左側に設置することができ、安定化させることが可能となる。このシステムにおいて、ロープ2の振れ位置x2及び振れ速度d/dt・x2は測定不可能な値であるため、オブザーバ演算器11により推定したロープ2の振れ位置推定値x2^及びロープ2の振れ速度推定値d/dt・x2^を利用する。
【0057】
上記外乱キャンセラによって状態方程式を上記数17とすることができるので、サーボシステムを図4に示すように構成することができる。
ここで、目標値をur=[d/dt・x1r,0,0]Tとし、測定出力をy(t)=[1,0,0]xCとし、状態変数をxC=[d/dt・x1,x2^,d/dt・x2^]Tとする。そして、測定出力と目標制御入力との偏差e(t)=ur(t)−y(t)を制御信号とし、フィードバックゲインをF=[f1,f2,f3]とすれば、上記数9は下記数18となる。
【0058】
[数18]
【0059】
また、制御入力u(t)は、下記数19となる。
【0060】
[数19]
【0061】
従って、上記数18及び数19より、レギュレータは下記数20となり、
【0062】
[数20]
【0063】
その解は、下記数21となる。
【0064】
[数21]
【0065】
従って、A1−B1Fを安定行列にできれば、偏差e(t)=ur(t)−y(t)となるので、偏差e(t)→0に制御可能となり、目標値追従制御を行うことができる。具体的には、フィードバックゲインFを調整することにより、A1−B1Fを安定化することができる。
【0066】
なお、最適なフィードバック係数(f1,f2,f3)を求めることは、クレーン振れ止め制御において重要な課題である。一般的に、フィードバック係数はオペレータの経験や現地による調整により決定されているが、本発明に係るクレーン振れ止め制御装置では、上記数20で示すレギュレータの極を重根にして極βとすれば、下記数22により演算でフィードバック係数を求めることが可能となる。
【0067】
[数22]
【0068】
以上の理論を図4の振れ止め制御部22に適用すると、次のような構成が実現される。すなわち、測定出力yからのトロリー1の速度d/dt・x1は、オブザーバ演算器11に入力される他、調節器32に入力される。トロリー1の速度d/dt・x1は、調節器32にて所定のフィードバックゲインf1を用いて調節された上で、加算器27において回転数/速度変換器26からのトロリー1の目標速度d/dt・x1rから減算される。この値は、次段の加算器28に出力される。
【0069】
また、オブザーバ演算器11からのロープ2の振れ位置推定値x2^は、調節器33に入力され、所定のフィードバックゲインf2を用いて調節された上で、加算器28において上記値から減算される。この値は、次段の加算器29に出力される。更に、オブザーバ演算器11からのロープ2の振れ速度推定値d/dt・x2^は、調節器34に入力され、所定のフィードバックゲインf3を用いて調節された上で、加算器29において上記値から減算される。
【0070】
これにより、加算器29からはトロリー1の目標駆動力fcrが出力され、この目標駆動力fcrは、力/トルク変換器30によって走行モータ5のトルク操作指令信号TcmdAに変換される。なお、オブザーバ演算器11からの外乱推定値δ^は、外乱キャンセラ31においてキャンセルされる。すなわち、外乱推定値δ^は、調整器31aにて係数1/M1を乗算された上で、力/トルク変換器35にてトルクに変換される。
【0071】
こうして変換されたトルクを、加算器36においてトルク操作指令信号TcmdAから減算することにより外乱をキャンセルして、インバータ24へのトルク指令信号Tcmdが得られる。そして、インバータ24は、このトルク指令信号Tcmdに基づき走行モータ5をトルク指令値(制御入力u)によりトルク制御するようになっている。
【0072】
ここで、上述したように、トロリー1の質量M1と重力加速度gは既知の値であるが、負荷3の質量M2とロープ2の長さLは変動する値であるので、上述したオブザーバと同様に測定可能とすれば、目標を安定化する極を得ることが可能となる。
【0073】
次に、図5を参照して、オブザーバ演算器11の具体的構成について説明する。このオブザーバ演算器11は、上述した数12の演算を行って推定値xB^を求める回路である。
図5に示すように、オブザーバ演算器11に入力された制御入力uは、演算器41にて係数1/M1を乗算されて制御入力成分u/M1とされる。加算器51は、検出されたトロリー1の速度d/dt・x1から積分器42から出力されたトロリー1の推定速度d/dt・x1^を減算する。この減算値は、調節器61,62,63,64においてゲインベクトルKの各係数k1,k2,k3,k4によってそれぞれゲイン調整される。
【0074】
調整器61で係数k1によってゲイン調整された出力は、加算器52で演算器41からの制御入力成分u/M1を加算され、加算器53で演算器44からの外乱推定値成分δ^/M1を減算され、加算器54で演算器43からの振れ速度推定値成分M2g/M1L・d/dt・x2^を減算された後、積分器42により積分される。これにより、積分器42でトロリー速度推定値d/dt・x1^が求められ、その結果は、加算器51にフィードバックされる。
【0075】
調節器62で係数k2によってゲイン調整された出力は、加算器58で積分器45から出力されたロープ2の振れ速度推定値d/dt・x2^を加算された後、積分器47で積分される。これにより、積分器47でロープ2の振れ位置推定値x2^が求められ、その結果が外部に出力されると共に加算器58にフィードバックされる。
【0076】
調節器63で係数k3によってゲイン調整された出力は、加算器55で演算器41からの制御入力成分u/M1を加算され、加算器56で演算器44からの外乱推定値成分δ^/M1を減算され、加算器57で演算器46からの振れ速度推定値成分(M1+M2)g/M1L・d/dt・x2^を減算された後、積分器45により積分される。これにより、積分器45でロープ2の振れ速度推定値d/dt・x2^が求められ、その結果は、外部に出力されると共に、加算器58にフィードバックされる。
【0077】
また、調節器64で係数k4によってゲイン調整された出力は、積分器48により積分される。これにより、積分器48で外乱推定値δ^が求められ、求められた外乱推定値δ^は、外部に出力されると共に、演算器44にフィードバックされる。
【0078】
このように、第1の実施形態に係るクレーン制御装置における振れ止め制御装置は、オブザーバによって外乱推定値δ^、ロープ2の振れ速度推定値d/dt・x2^、及び振れ位置推定値x2^を得ると共に、レギュレータによって目標の安定化を図ることができる。このため、振れ角検出器や複雑な演算、或いはゲイン調整などを不要としながらも、ロープ2の振れ角度θを推定して検出し、これに基づきトロリー1を駆動する走行モータ5の動作をトルク制御により制御することで、クレーンの振れを止めることができる。
【0079】
なお、第1の実施形態に係るクレーン制御装置によるシミュレーション結果は、図6に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。また、トロリー1の動作開始時及び動作停止時にロープ2の振れが収束していることが判明した。従って、各種パラメータ調整が容易であると共に高精度にクレーンの振れを止めることができるといえる。
【0080】
[第2の実施形態]
図7は、本発明の第2の実施形態に係るクレーン振れ角検出装置及びクレーン振れ止め制御装置を備えたクレーン制御装置のブロック図である。図8は、この制御装置の詳細ブロック図である。図9は、この制御装置の振れ抑制速度演算処理を示すフローチャートである。図10は、このクレーン制御装置によるシミュレーション結果を示す図である。
【0081】
上述した第1の実施形態では、トルク指令信号をインバータに与えるトルク制御方式であったが、この第2の実施形態では、インバータに速度指令信号を与え、インバータ内部で速度・トルク制御を行うクレーン制御装置におけるクレーン振れ止め制御装置の例を示している。この方式は、既設のシステムに組み込むのが容易な構成となっている。すなわち、一般的なクレーンの速度制御は、制御装置から速度指令信号をインバータ等に出力し、インバータ内部で速度・トルク制御を行う構成となっている。
【0082】
従って、第2の実施形態のクレーン振れ止め制御装置による制御方式は、一般的なクレーン振れ止め制御装置に組み込んでクレーンの振れを制御するために、既存の制御装置の大幅な変更が不要であるという利点がある。
【0083】
図7に示すように、インバータ24’により速度・トルク制御で走行モータ5を駆動する場合、制御装置20’は、速度パターン演算部21により速度操作指令信号を算出すると共に、振れ止め制御部22’において上述した振れ角度θを利用して振れ抑制速度指令信号を算出する。そして、走行モータ5の速度指令信号を求め、これをインバータ24’に出力する。
【0084】
ただし、ロープ2の振れ位置推定値x2^等の演算結果を速度指令信号に加える場合は、トロリー1の速度制御に影響を与えるため、各種パラメータの設定が非常に困難なものとなる。そこで、第2のクレーン振れ止め制御装置では、トロリー1を減速する場合のみに振れ止め制御を行うこととした。
【0085】
図7に示したクレーン振れ止め制御装置の制御回路における制御構成の詳細は、例えば図8に示すようになる。速度パターン演算部21により算出された速度操作指令信号rpmrは、加算器71に入力されると共に振れ抑制速度演算器72に入力される。
【0086】
一方、制御対象である走行モータ5に入力される制御入力uは、走行モータ5のトルクTを示し、インバータ24’に戻されると共に振れ止め制御部22’のオブザーバ演算器11に入力される。また、エンコーダ6から出力される測定出力yとしてのトロリー1の速度d/dt・x1は、インバータ24’に戻されると共に、オブザーバ演算器11及び振れ抑制速度演算器72にそれぞれ入力される。
【0087】
更に、オブザーバ演算器11からのロープ2の振れ位置推定値x2^は、振れ抑制速度演算器72に入力される。振れ抑制速度演算器72は、これらの入力に基づいて、振れ抑制速度指令信号を演算し、加算器71に出力する。加算器71においては、速度操作指令信号rpmrからこの振れ抑制速度指令信号を減算することによって、速度指令信号rpmcmdが算出される。インバータ24’は、この速度指令信号rpmcmdに基づき走行モータ5の速度・トルク制御を行う。
【0088】
従って、第2のクレーン振れ止め制御装置では、オブザーバ演算器11により得られたロープ2の振れ位置推定値x2^(振れ角度θ)のみを用いてクレーンの振れ止め制御を行うことができる。なお、速度指令信号rpmcmdの演算処理は、例えば次に示すようなものとなる。
【0089】
すなわち、図9に示すように、振れ抑制速度演算器72は、速度操作指令信号rpmrとトロリー1の速度d/dt・x1とに基づいて、トロリー1の減速を示す減速領域であるか否かを判断する(ステップS100)。減速領域であると判断した場合(ステップS100のYes)は、トロリー1の速度d/dt・x1と振れ角度θとの符号が一致するか否かを判断する(ステップS102)。
【0090】
これらの符号が一致しないと判断した場合(ステップS102のNo)は、ロープ2の振れ位置推定値x2^と図示しない補償係数とを用いて、振れ抑制速度を演算により求める(ステップS104)。そして、振れの発散を防止するために、振れ抑制速度にリミット処理を施し(ステップS106)、振れ抑制速度指令信号を算出し、算出した振れ抑制速度指令信号出力して(ステップS108)、上記ステップS100に移行し以降の処理を繰り返す。
【0091】
なお、補償係数は、求められる振れ抑制速度が、トロリー1の速度d/dt・x1の1ノッチ程度の速度となるように調整されると良い。例えば、実際の熟練のクレーンオペレータは、ロープ2の振れ角度θによって振れ方向にトロリー1を移動させてロープ2の振れを止めるといういわゆる追いノッチ操作を行っている。
【0092】
加算器71においては、速度操作指令信号rpmrから振れ抑制速度演算器72より出力された振れ抑制速度指令信号を減算することによって、速度指令信号rpmcmdが算出される。なお、上記ステップS100にて減速領域でないと判断した場合(ステップS100のNo)、及び上記ステップS102にて符号が一致すると判断した場合(ステップS102のYes)は、振れ抑制速度を0として(ステップS110)、上記ステップS108に移行する。
【0093】
このように得られた速度指令信号rpmcmdを用いたクレーンの振れ止め制御は、トロリー1が、例えば図1(b)に示す状態においてその速度d/dt・x1と振れ角度θとの符号が一致しない場合に行われる。これにより、トロリー1の減速時に、走行モータ5の動作を速度制御により制御して、クレーンの振れを容易に止めることが可能となる。
【0094】
なお、第2のクレーン振れ止め制御装置によるシミュレーション結果は、図10に示すようなものとなった。このシミュレーション結果によれば、ロープ2の実際の振れ速度(実振れ速度)及び振れ位置(実振れ位置)と、推定された振れ速度(推定振れ速度)及び振れ位置(推定振れ位置)とが、それぞれほぼ一致していることが判明した。また、トロリー1の動作停止時にロープ2の振れが収束していることが判明した。従って、簡単且つ安価な構成で既設のシステムに適用できて高精度且つ確実にクレーンの振れを止めることができる。
【符号の説明】
【0095】
1 トロリー
2 ロープ
3 吊荷
4 減速機
5 走行モータ
6 エンコーダ
11 オブザーバ演算器
12 検出部
21 速度パターン演算部
22 振れ止め制御部
24 インバータ
26 回転数/速度変換器
27〜29 加算器
30 力/トルク変換器
31 外乱キャンセラ
32〜34 調節器
35 力/トルク変換器
36 加算器
【特許請求の範囲】
【請求項1】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記求められたロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する
ことを特徴とするクレーン振れ角検出方法。
【請求項2】
前記状態方程式が、下記数1で表され、前記オブザーバが、下記数2で表されることを特徴とする請求項1記載のクレーン振れ角検出方法。
[数1]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数2]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【請求項3】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、
前記制御装置が、前記走行モータの速度パターン演算式に基づいて速度操作指令信号rpmrを出力し、レギュレータにより、前記速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出し、
この算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御する
ことを特徴とするクレーン振れ止め制御方法。
【請求項4】
前記状態方程式が、下記数3で表され、前記オブザーバが、下記数4で表され、前記レギュレータが、下記数5で表されることを特徴とする請求項3記載のクレーン振れ止め制御方法。
[数3]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数4]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
[数5]
ただし、下記式
は、下記のように表され、
d/dt・xA=A1xA+B1u+D−E
=A1xA+B1u
且つ、
xC:状態変数、xC=[d/dt・x1,x2^,d/dt・x2^]T
ur:目標値、ur=[d/dt・x1r,0,0]T、
F:フィードバックゲイン、F=[f1,f2,f3]
である。
【請求項5】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求め、
前記制御装置が、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出し、
前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する
ことを特徴とするクレーン振れ止め制御方法。
【請求項6】
前記状態方程式が、下記数6で表され、前記オブザーバが、下記数7で表されることを特徴とする請求項5記載のクレーン振れ止め制御方法。
[数6]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数7]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
KはゲインベクトルK=[k1,k2,k3,k4]Tである。
【請求項7】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、
このオブザーバ演算器により求められた前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する振れ角検出手段と
を備えたことを特徴とするクレーン振れ角検出装置。
【請求項8】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、
前記走行モータの速度パターン演算式に基づく速度操作指令信号rpmrを入力し、この速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出する演算手段と、
を備え、
前記算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とするクレーン振れ止め制御装置。
【請求項9】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求めるオブザーバ演算器と、
前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出する演算手段と、
前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する制御手段と
を備えたことを特徴とするクレーン振れ止め制御装置。
【請求項1】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、前記求められたロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する
ことを特徴とするクレーン振れ角検出方法。
【請求項2】
前記状態方程式が、下記数1で表され、前記オブザーバが、下記数2で表されることを特徴とする請求項1記載のクレーン振れ角検出方法。
[数1]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数2]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
【請求項3】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求め、
前記制御装置が、前記走行モータの速度パターン演算式に基づいて速度操作指令信号rpmrを出力し、レギュレータにより、前記速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出し、
この算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御する
ことを特徴とするクレーン振れ止め制御方法。
【請求項4】
前記状態方程式が、下記数3で表され、前記オブザーバが、下記数4で表され、前記レギュレータが、下記数5で表されることを特徴とする請求項3記載のクレーン振れ止め制御方法。
[数3]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数4]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
K:ゲインベクトル、K=[k1,k2,k3,k4]T
である。
[数5]
ただし、下記式
は、下記のように表され、
d/dt・xA=A1xA+B1u+D−E
=A1xA+B1u
且つ、
xC:状態変数、xC=[d/dt・x1,x2^,d/dt・x2^]T
ur:目標値、ur=[d/dt・x1r,0,0]T、
F:フィードバックゲイン、F=[f1,f2,f3]
である。
【請求項5】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを制御装置に入力し、
前記制御装置が、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求め、
前記制御装置が、前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出し、
前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する
ことを特徴とするクレーン振れ止め制御方法。
【請求項6】
前記状態方程式が、下記数6で表され、前記オブザーバが、下記数7で表されることを特徴とする請求項5記載のクレーン振れ止め制御方法。
[数6]
ただし、M1:トロリーの質量、
x1:トロリーの位置、
d/dt・x1:トロリーの速度、
M2:吊荷の質量、
L:ロープの長さ、
x2:ロープの振れ位置、
d/dt・x2:ロープの振れ速度、
u:制御入力=fc:トロリーの駆動力、
δ:外乱(摩擦抵抗を含む)
である。
[数7]
ただし、 xB^(t):状態変数の推定値、
y(t):制御出力でy(t)=CxB(t)、
C=[1,0,0,0]、
KはゲインベクトルK=[k1,k2,k3,k4]Tである。
【請求項7】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、
このオブザーバ演算器により求められた前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを推定する振れ角検出手段と
を備えたことを特徴とするクレーン振れ角検出装置。
【請求項8】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ速度推定値d/dt・x2^、前記ロープの振れ位置推定値x2^及び外乱推定値δ^を求めるオブザーバ演算器と、
前記走行モータの速度パターン演算式に基づく速度操作指令信号rpmrを入力し、この速度操作指令信号rpmrからトロリーの速度d/dt・x1r、前記ロープの振れ速度推定値d/dt・x2^及び前記ロープの振れ位置推定値x2^をそれぞれ所定のフィードバックゲインで調整した値を減算することにより前記トロリーの目標駆動力fcrを求め、これを前記走行モータのトルク操作指令信号TcmdAに変換すると共に、トルク操作指令信号TcmdAから、前記外乱推定値δ^から求められたトルク成分をキャンセルして前記走行モータのトルク指令信号Tcmdを算出する演算手段と、
を備え、
前記算出されたトルク指令信号Tcmdによって前記走行モータをトルク制御することを特徴とするクレーン振れ止め制御装置。
【請求項9】
吊荷をロープで吊り上げて搬送するクレーンのトロリーを駆動する走行モータの駆動力fcを入力し、トロリー系及び吊荷系の運動方程式から求められた状態方程式であって、トロリー系に作用する摩擦係数等の外乱成分δを定数で且つ状態変数とする状態方程式から求められたオブザーバに基づいて、前記ロープの振れ位置推定値x2^を求めるオブザーバ演算器と、
前記トロリーを減速する場合に、前記走行モータの速度パターン演算式により速度操作指令信号rpmrを算出すると共に、前記ロープの振れ位置推定値x2^から前記ロープの振れ角度θを求めると共に、前記ロープの振れ角度θから振れ抑制速度指令信号を算出する演算手段と、
前記速度操作指令信号rpmrと前記振れ抑制速度指令信号とに基づく演算を行って前記走行モータの速度指令信号rpmcmdを求め、この速度指令信号rpmcmdに基づき前記走行モータを速度・トルク制御する制御手段と
を備えたことを特徴とするクレーン振れ止め制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−111561(P2012−111561A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−259248(P2010−259248)
【出願日】平成22年11月19日(2010.11.19)
【出願人】(300041192)宇部興産機械株式会社 (268)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月19日(2010.11.19)
【出願人】(300041192)宇部興産機械株式会社 (268)
【Fターム(参考)】
[ Back to top ]