
クレーン
【課題】アタッチメントが安全な状態のときにエンジンの自動停止を行う。
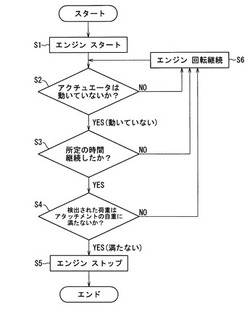
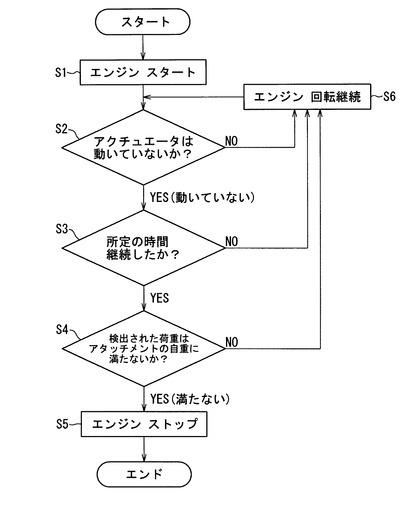
【解決手段】コントローラ75(エンジン制御手段)は、複数のアクチュエータ60がいずれも動いていないことをセンサ71(アクチュエータ作動検出手段)が検出している状態が所定時間継続し(ステップS2及びS3)、かつ、荷重検出手段72が検出した荷重がアタッチメント30の自重より小さい場合に(ステップS4)、エンジン51を停止させる(ステップS5)。
【解決手段】コントローラ75(エンジン制御手段)は、複数のアクチュエータ60がいずれも動いていないことをセンサ71(アクチュエータ作動検出手段)が検出している状態が所定時間継続し(ステップS2及びS3)、かつ、荷重検出手段72が検出した荷重がアタッチメント30の自重より小さい場合に(ステップS4)、エンジン51を停止させる(ステップS5)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の条件を満たした場合にエンジンを停止させるクレーンに関する。
【背景技術】
【0002】
従来より、アイドリングストップ機能を備えたクレーンがある(例えば特許文献1)。この種のクレーンでは、所定の条件を満たした場合にエンジンを自動停止させることで、クレーンの燃費低減、排気や騒音の低減などを図っている。
【0003】
特許文献1に記載の技術では、「クレーン操作が無い状態」と「吊荷が無い状態」とが同時に予め設定された時間継続したときにエンジンを停止する(アクセル操作が無い状態を上記の条件に加える場合もある)。
【0004】
上記技術では、吊荷が無い状態をエンジンの自動停止の条件としている。これにより、吊荷を吊った状態でエンジンが自動停止するという危険を回避している。なお、上記技術における「吊荷が無い状態」とは、ブーム先端に負荷される吊上げ荷重が、吊荷用フックの重量と同じになった状態である(特許文献1の段落0015参照)。また、フックは、様々な種類があるアタッチメントのうちの一つである(詳細は後述)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−62782号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術では、アタッチメントが煽られる可能性があるにもかかわらず、エンジンが自動停止するという危険が生じるおそれがある。
【0007】
さらに詳しくは、ブームから吊り下げられている(着地等していない)アタッチメントは、例えば風などで煽られる場合がある。特に、タワークレーンのように高所での作業を行うクレーンではアタッチメントが大きく煽られる場合がある。煽られたアタッチメントの周辺に作業者がいる場合、アタッチメントが作業者に危険をもたらすおそれがある。そこで、この危険を回避するために、クレーンの旋回、アタッチメントの巻上げ又は巻下げ等の操作を行うことが考えられる。しかし、上記技術では、アタッチメントがブームから吊り下げられている(着地等していない)状態でも、上記の所定の条件を満たしてエンジンが自動停止する場合がある。エンジンが自動停止した場合は、上記の危険を回避する操作が迅速に行えない。
【0008】
また、特許文献1に記載の技術では、アタッチメントがフリーフォール状態であるにもかかわらず、エンジンが自動停止するという危険が生じるおそれがある。
【0009】
さらに詳しくは、上記技術では、クレーン操作が無い状態をエンジン停止の条件の一つとしている。上記技術における「クレーン操作が無い状態」とは、クレーン操作手段(具体的には操作レバー)の操作が無い状態である(特許文献1の請求項1及び段落0016参照)。クレーン操作手段は、エンジンを動力源としてアクチュエータを駆動させるときに操作されるものである(同部分参照)。
【0010】
ここで、アタッチメントをフリーフォール状態(詳細は後述)とする場合がある。この場合は、クレーン操作手段は操作されない(操作レバーはニュートラル状態である)。このとき、上記技術では、「クレーン操作が無い状態」の条件を満たす。さらに他の条件も満たした場合は、アタッチメントがフリーフォール状態であるにもかかわらず、エンジンが自動停止してしまう。特に、アタッチメントの揚程が高い状態からアタッチメントをフリーフォール状態にする場合、クレーン操作手段を操作しない状態が比較的長時間続くため、上記技術の「予め設定された時間継続したとき」の条件を満たし、その結果、フリーフォール状態でエンジンが自動停止するおそれがある。
【0011】
そこで本発明は、アタッチメントが安全な状態のときにエンジンの自動停止を行うことができるクレーンを提供することを目的とする。
【課題を解決するための手段及び効果】
【0012】
第1の発明のクレーンは、クレーン本体と、前記クレーン本体に設けられたエンジンと、前記エンジンを動力源として駆動される複数のアクチュエータと、前記クレーン本体に取り付けられたブームと、前記複数のアクチュエータのうち一部の前記アクチュエータに巻かれた巻上げロープを介して前記ブームから吊り下げられるアタッチメントと、前記複数のアクチュエータが動いているか否かを検出するアクチュエータ作動検出手段と、前記アタッチメントの荷重を検出する荷重検出手段と、前記エンジンを制御するエンジン制御手段と、を備える。前記エンジン制御手段は、前記複数のアクチュエータがいずれも動いていないことを前記アクチュエータ作動検出手段が検出している状態が所定時間継続し、かつ、前記荷重検出手段が検出した荷重が前記アタッチメントの自重より小さい場合に前記エンジンを停止させる。
なお、「アクチュエータが動いている」には、エンジンを動力源としてアクチュエータが駆動されている状態だけでなく、アタッチメントがフリーフォール状態の場合のように、エンジンを動力源とせずアクチュエータが作動している状態も含む。
【0013】
このクレーンは、複数のアクチュエータのうち一部のアクチュエータに巻かれた巻上げロープを介して、ブームから吊り下げられるアタッチメントを備える。また、「複数のアクチュエータがいずれも動いていないことをアクチュエータ作動検出手段が検出している」ことをエンジン制御手段によるエンジンの停止の条件に含む。この条件を満たす場合は、巻上げロープが巻かれたアクチュエータが動いていないので、巻上げロープを介してブームから吊り下げられたアタッチメントも動いていない。すなわち、この条件を満たす場合は、アタッチメントはフリーフォール状態でない(状態A)。
また、このクレーンは、アタッチメントの荷重を検出する荷重検出手段を備える。また、「荷重検出手段が検出した荷重がアタッチメントの自重より小さい」ことをエンジン制御手段によるエンジンの停止の条件に含む。この条件を満たす場合は、アタッチメントの揚程が0の状態であるので、アタッチメントが煽られない(状態B)。
このクレーンでは、上記の状態Aかつ状態Bを満たす場合にエンジン制御手段がエンジンを停止させる。したがって、アタッチメントが安全な状態のときにエンジンの自動停止を行うことができる。
【0014】
第2の発明のクレーンは、前記アタッチメントの前記自重を設定するアタッチメント自重セット手段を備える。
【0015】
このクレーンでは、アタッチメントの仕様が変わったときでも、アタッチメント自重セット手段でアタッチメントの自重を設定すれば、第1の発明を確実に実施できる。
【図面の簡単な説明】
【0016】
【図1】クレーンの全体図である。
【図2】図1に示すクレーンが備えるエンジン制御手段周辺のブロック図である。
【図3】図2に示すエンジン制御手段の動作のフローチャートである。
【発明を実施するための形態】
【0017】
以下、図1〜図3を参照してクレーン1の実施形態を説明する。
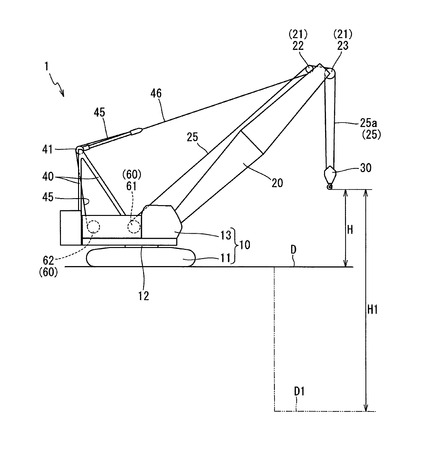
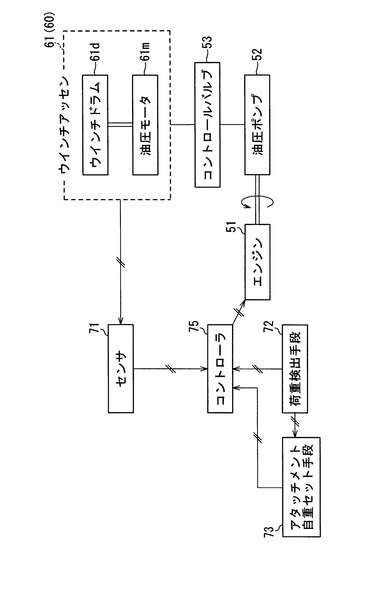
クレーン1は、図1に示すように、油圧式の移動式クレーンであり、具体的には例えばラチスブームクローラクレーン(LBCC)等である。クレーン1は、所定の条件を満たしたときにエンジン51が自動的に停止する機能(アイドリングストップ機能)を備える。クレーン1は、クレーン本体10と、クレーン本体10に取り付けられたブーム20と、ブーム20から吊り下げられるアタッチメント30と、クレーン本体10に取り付けられたガントリ40とを備える。また、図2に示すように、クレーン1は、クレーン本体10(図1参照)に設けられたエンジン51と、エンジン51に駆動される油圧ポンプ52と、油圧ポンプ52に接続されたコントロールバルブ53と、コントロールバルブ53に接続された複数のアクチュエータ60(図2では1つのみ図示)と、エンジン51を制御するコントローラ75(エンジン制御手段)とを備える。さらに、クレーン1(図1参照)は、コントローラ75にそれぞれ接続された、センサ71(アクチュエータ作動検出手段)と、荷重検出手段72と、アタッチメント自重セット手段73とを備える。
【0018】
クレーン本体10は、図1に示すように、下部本体11と、下部本体11の上方に取り付けられた上部本体13とを備える。下部本体11は、例えばクローラ式走行体である(ホイール式走行体でも良い)。上部本体13は、下部本体11の上方に旋回ベアリング12を介して取り付けられ、下部本体11に対して旋回可能である。
【0019】
ブーム20は、クレーン本体10に取り付けられる。ブーム20は、巻上げロープ25を介してアタッチメント30を吊り下げる部材であり、例えばラチスブームである(箱型の伸縮式ブームでも良い)。ブーム20は、上部本体13の前端部に起伏可能に取り付けられる。ブーム20の先端には補ジブ(図示なし)を取り付けても良い。ブーム20は先端部にブームシーブ21を備える。
【0020】
ブームシーブ21は、巻上げロープ25の掛け渡しや掛け回しをするための滑車であり、ブーム20に複数設けられる。複数のブームシーブ21には、ブーム20の背面に配置されたアイドラシーブ22と、ブーム20の先端部の前面側に配置されたポイントシーブ23とがある。
【0021】
巻上げロープ25は、アタッチメント30を巻上げ及び巻下げするためのワイヤである。巻上げロープ25の一端側は、ウインチアッセン61(複数のアクチュエータ60のうち一部のアクチュエータ)のウインチドラム61d(図2参照)に巻かれる。巻上げロープ25の他端側は、アタッチメント30が備えるシーブ(図示なし)とポイントシーブ23との間に掛け回される(巻上げロープ25のうち、ポイントシーブ23から吊り下げられた部分を「巻上げロープ25a」とする)。巻上げロープ25はアイドラシーブ22に掛け渡される。
【0022】
アタッチメント30は、巻上げロープ25(25a)を介してブーム20から吊り下げられる部材である。アタッチメント30には、クレーン作業用の吊荷等を吊るためのフック、または、土木作業用のアタッチメント(図示なし)などがある。フックには、クレーン1の吊上げ能力等に応じた様々な種類のものがある。土木作業用のアタッチメントには、例えばバイブロハンマやクラムシェルバケット等がある。
【0023】
このアタッチメント30は、巻上げ及び巻下げされる。すなわち、ウインチアッセン61により巻上げロープ25が巻き込み及び巻き出しされることで、アタッチメント30の揚程Hが変化する。アタッチメント30の揚程Hとは、アタッチメント30の直下の基準面Dからアタッチメント30の下端までの高さ(変化量)である。基準面Dは、具体的には地面(地上または地下)や海面などである。なお、アタッチメント30の直下の地面が地下(下部本体11よりも下方側)にある場合の基準面D1及び揚程H1を、図1における二点鎖線で示す。
【0024】
ガントリ40は、ブーム20を起伏させるための部材であり、例えば箱型の構造物により構成される。ガントリ40は、ブーム20の後方側に配置され、クレーン本体10に取り付けられる。ガントリ40の先端部とブーム20の先端部とが、起伏ロープ45及びガイライン46で接続される。ガントリ40の先端部に、起伏ロープ45を掛けるガントリシーブ41が設けられる。そして、起伏ロープ45を起伏用ウインチアッセン62(複数のアクチュエータ60の一部)で巻き込み及び巻き出しすることで、ブーム20が起伏する。なお、ブーム20を起伏するための構成は他の構成に変形しても良い。
【0025】
エンジン51(図2参照)は、複数のアクチュエータ60の動力源であり、クレーン本体10に設置される。図2に示すように、エンジン51は、油圧ポンプ52を駆動する。油圧ポンプ52は、コントロールバルブ53を介してアクチュエータ60に作動油を供給(吐出)する。
【0026】
コントロールバルブ53は、油圧ポンプ52から複数のアクチュエータ60(図2では1つのみ図示)に供給される作動油の流量を制御する。コントロールバルブ53は、図示しないクレーン操作手段(操作レバーなど)の操作に応じて作動する。すなわち、クレーン操作手段の操作に応じて、複数のアクチュエータ60が作動する。
【0027】
複数のアクチュエータ60は、エンジン51を動力源として駆動される、油圧式アクチュエータである。図1に示すように、複数のアクチュエータ60には、例えば、ウインチアッセン61、起伏用ウインチアッセン62、上部本体13の旋回用の油圧モータ(図示なし)、及び、下部本体11の走行用の油圧モータ(図示なし)等がある。
【0028】
ウインチアッセン61(複数のアクチュエータ60のうち一部のアクチュエータ)は、巻上げロープ25の巻き込み及び巻き出しをするアクチュエータである。ウインチアッセン61は、例えば上部本体13に配置される(ブーム20に配置しても良い)。図2に示すように、ウインチアッセン61は、油圧モータ61m(巻上げモータ)と、油圧モータ61mに連結可能なウインチドラム61d(巻上げドラム)とを備える。油圧モータ61mは、油圧ポンプ52から吐出された作動油により駆動される。ウインチドラム61dには、巻上げロープ25(図1参照)が巻かれる。
【0029】
また、ウインチアッセン61は次のように動作する。
油圧モータ61mとウインチドラム61dとが連結された状態で、油圧モータ61mを駆動すると、ウインチドラム61dが回転する。その結果、ウインチドラム61dに巻かれた巻上げロープ25(図1参照)が巻き込み及び巻き出しされる。
また、油圧モータ61mとウインチドラム61dとの連結を切り離した状態にすると、ウインチドラム61dが回転自由となる。このとき、図1に示すアタッチメント30の揚程Hが0でない場合、アタッチメント30はフリーフォール状態になる(自由落下する)。すなわち、図2に示すエンジン51の動力(油圧モータ61mの動力)を用いずに、ウインチアッセン61(アクチュエータ60)が動いている状態となる。
【0030】
起伏用ウインチアッセン62(アクチュエータ)は、図1に示すように、起伏ロープ45を巻き込み及び巻き出しするアクチュエータである。起伏用ウインチアッセン62は、油圧モータ(ブームモータ、図示なし)と、この油圧モータに連結されたウインチドラム(ブームドラム、図示なし)とを備える。起伏用ウインチアッセン62は、例えば上部本体13に配置される(ガントリ40に取り付けても良い)。
【0031】
センサ71(アクチュエータ作動検出手段)は、図2に示すように、複数のアクチュエータ60が動いているか否かを検出する装置である。センサ71は、クレーン本体10(図1参照)に対してアクチュエータ60が動いているか否かを、複数のアクチュエータ60それぞれについて検出する。複数のセンサ71はそれぞれ、コントローラ75に接続され、検出結果をコントローラ75に出力する(図2では複数のセンサ71のうち1つのみ図示している)。センサ71は、アクチュエータ60がウインチアッセン61の場合、ウインチドラム61dの回転を検出する。この場合のセンサ71は、例えばウインチドラム61dの回転を非接触で検知する近接センサ(回転センサ)等である。
【0032】
このセンサ71が検出する「アクチュエータ60が動いている」状態には、エンジン51を動力源としてアクチュエータ60が駆動されている状態だけでなく、エンジン51を動力源とせずアクチュエータ60が作動している状態も含む。具体的には、アクチュエータ60がウインチアッセン61の場合、油圧モータ61mは駆動されていないがウインチドラム61dが回転しているとき、すなわち、図1に示すアタッチメント30がフリーフォール状態のときは、ウインチアッセン61は動いている状態である。
なお、クレーン1での作業時に、クレーン操作手段(操作レバーなど)を操作しなければ動くことがないアクチュエータ60(例えば、起伏用ウインチアッセン62、旋回用や走行用のアクチュエータなど)については、クレーン操作手段が出力した操作信号の有無を検出し、その結果としてアクチュエータ60が動いているか否かを検出しても良い。
【0033】
荷重検出手段72(図2参照)は、アタッチメント30(図1参照)の荷重を検出する。図2に示すように、荷重検出手段72は、コントローラ75に接続され、検出した荷重をコントローラ75に出力する。例えば、荷重検出手段72は、図1に示す巻上げロープ25の張力を検出する装置を備え、具体的には例えばアイドラシーブ22に設けたロードセル等を備える。また例えば、荷重検出手段72(図2参照)は、起伏ロープ45やガイライン46の張力を検出する装置を備え、具体的には例えばガントリシーブ41に設けたロードセル等を備える。なお、荷重検出手段72(図2参照)が検出するアタッチメント30の荷重は、上記のロードセル等の装置により検出された前記張力から、ロープの自重による荷重(巻上げロープ25a部分の荷重など)を引いた値である。ただし、ロープの自重による荷重がアタッチメント30の荷重よりも十分小さい場合は、ロープの自重による荷重は無視しても良い。
【0034】
アタッチメント自重セット手段73は、「アタッチメント30(図1参照)の自重」を設定する。図2に示すように、アタッチメント自重セット手段73はコントローラ75に接続され、アタッチメント30(図1参照)の自重をコントローラ75に設定(セット)する。アタッチメント自重セット手段73は、例えば次のように用いる。図1に示すアタッチメント30の仕様を変更する際(作業前)に、変更後のアタッチメント30をブーム20から吊上げた状態(揚程Hが0より大きい状態)にする。この状態で、変更後のアタッチメント30の荷重を図2に示す荷重検出手段72で検出する。荷重検出手段72は検出結果をアタッチメント自重セット手段73に出力する。アタッチメント自重セット手段73は、入力された検出結果に基づき、アタッチメント30の自重をコントローラ75に設定する。なお、アタッチメント自重セット手段73は、手動で入力したアタッチメント30の自重をコントローラ75に設定する装置でも良い。
【0035】
コントローラ75(エンジン制御手段)は、エンジン51を制御する装置である。コントローラ75は、エンジン51に接続され、エンジン51に停止の指令を出力する。コントローラ75は、所定の条件を満たしたときにエンジン51を停止させる機能(アイドリングストップ機能)を備える。
【0036】
(エンジン制御手段の動作)
このコントローラ75の動作のフローチャートを図3に示す(以下では、上述したクレーン1の各構成要素については図1及び図2参照)。コントローラ75の動作の概略は次のとおりである。すなわち、アクチュエータ60が動いていないことをセンサ71が検出している状態が所定時間継続し(ステップS2及びS3)、かつ、荷重検出手段72が検出した荷重がアタッチメント30の自重より小さい場合に(ステップS4)、エンジン51を停止させる(ステップS5)。以下、エンジン51が作動していることを初期条件として(ステップS1参照)説明する。
【0037】
ステップS2では、アクチュエータ60が動いていないか判定する。さらに詳しくは、ステップS2では、複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出しているか否かを判定する(「アクチュエータ60が動いている」状態の詳細についてはセンサ71の説明を参照)。ステップS2では、具体的には、アタッチメント30が巻上げも巻下げもされておらず(フリーフォール状態でもない)、かつ、他のクレーン操作(ブーム20の起伏、旋回や走行など)もされていない状態であるか否かを判定する。アクチュエータ60が動いていない場合は、ステップS3に進む。アクチュエータ60が動いている場合は、エンジン51の回転を継続する(ステップS6)。なお、「エンジン51の回転を継続する」とは、アイドリングストップ機能に基づくエンジン51の停止をしないことを意味する(例えば、エンジンキーの操作等によりエンジン51が停止する場合はありうる)。
【0038】
ステップS3では、ステップS2の条件を満たす状態(複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している状態)が所定時間継続しているか否かを判定する。所定時間継続していない場合は、エンジン51の回転を継続する(ステップS6)。所定時間継続している場合は、ステップS4に進む。
【0039】
ステップS4では、荷重検出手段72が検出したアタッチメント30の荷重が、アタッチメント30の自重より小さいか否かを判定する。すなわち、ステップS4では、アタッチメント30の揚程Hが0か否かを判定する。アタッチメント30の荷重がアタッチメント30の自重以上の場合はエンジン51の回転を継続(ステップS6)し、自重より小さい場合はエンジンを停止(ステップS5)して処理を終了する。
なお、ステップS4では、アタッチメント30の荷重が所定値よりも小さいか否かを判定しても良い。前記所定値は、アタッチメント30の自重より小さい値である(アタッチメント30の自重に基づいて定めた値である)。すなわち、ステップS4では、アタッチメント30の荷重がアタッチメント30の自重に、いわば大きく満たないか否かを判定しても良い。このような判定を行った場合、アタッチメント30の揚程Hが0であることをより確実に判定できる。
【0040】
(本実施形態のクレーンの特徴)
(特徴1)
このクレーン1は、図1に示すように、ウインチアッセン61のウインチドラム61d(図2参照)に巻かれた巻上げロープ25を介して、ブーム20から吊り下げられるアタッチメント30を備える。また、ステップS2(以下、ステップS2〜S5については図3参照)の判断を行う。すなわち、図2に示す「複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している」ことをコントローラ75によるエンジン51の停止(ステップS5)の条件に含む。
このステップS2の条件を満たす場合は、図1に示すウインチアッセン61のウインチドラム61d(図2参照)が動いていないので、巻上げロープ25を介してブーム20から吊り下げられたアタッチメント30も動いていない。すなわち、ステップS2の条件を満たす場合は、アタッチメント30はフリーフォール状態でない(状態A)。
【0041】
また、このクレーン1は、アタッチメント30の荷重を検出する荷重検出手段72(図2参照)を備える。また、ステップS4の判断を行う。すなわち、図2に示す「荷重検出手段72が検出した荷重がアタッチメント30(図1参照)の自重より小さい」ことをコントローラ75によるエンジン51の停止の条件に含む。
ステップS4の条件を満たす場合は、図1に示すアタッチメント30の揚程Hが0の状態である。すなわち、アタッチメント30を基準面D(地上等)に預けた状態である。言い換えれば、アタッチメント30は、巻上げロープ25を介してブーム20から吊り下げられていることのみによって支持された状態ではなく、基準面Dに支持された状態である。この状態では、アタッチメント30が煽られない(状態B)。
【0042】
このクレーン1では、上記の状態Aかつ状態Bを満たす場合に図2に示すコントローラ75がエンジン51を停止させる(ステップS5)。したがって、アタッチメント30(図1参照)が安全な状態のときにエンジン51の自動停止を行うことができる。
【0043】
なお、このクレーン1は、従来の技術と同じようなアイドリングストップ機能を備える。さらに詳しくは、クレーン1は、エンジン51を動力源として駆動される複数のアクチュエータ60を備える。また、ステップS2及びS3の判断を行う。すなわち、「複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している状態が所定時間継続する」ことをコントローラ75によるエンジン51の停止の条件に含む。
ステップS2の条件を満たす場合は、複数のアクチュエータ60がいずれも動いていないので、複数のアクチュエータ60を駆動するためのエンジン51の作動は必要ない。さらに、この状態が所定時間継続している場合(ステップS3)は、クレーン1の操縦者(オペレータ)にアクチュエータ60を操作する意思が無い可能性が高い。これらステップS2及びS3の条件を満たしたときにエンジン51が自動停止する場合がある(ステップS5)。よって、エンジン51のアイドリングを適切なときに停止させることができ、その結果、クレーン1の燃費の低減(動力削減)、排気や騒音の低減ができる。
【0044】
また、このクレーン1では、土木作業用のアタッチメント30(図1参照)を備える場合も上記の効果を奏する。
なお、特許文献1に記載の従来技術では、エンジン51(図2参照)の自動停止の条件に「吊荷が無い状態」を含む。上記従来技術において、土木作業用のアタッチメント30のうちフックを除く部分(例えばバイブロハンマ等)を「吊荷」と考えれば上記条件を満たさないのでエンジン51は自動停止しない。また、前記部分をアタッチメント30の一部と考えても、上述したようにアタッチメント30が煽られるという危険が生じるおそれがある。
【0045】
(特徴2)
このクレーン1は、アタッチメント30(図1参照)の自重を設定するアタッチメント自重セット手段73(図2参照)を備える。よって、アタッチメント30の仕様が変わったときでも、アタッチメント自重セット手段73でアタッチメント30の自重を設定すれば、特徴1に記載の効果を確実に奏する。
【0046】
(変形例)
上記実施形態では、図3に示すステップS2〜S4の条件判断をしたが、本発明の効果を奏する範囲内で条件判断の順や内容を変えても良い。例えば、アクチュエータ60(図1参照)が動いていないという条件(ステップS2)、及び、検出された荷重がアタッチメント30(図1参照)の自重に満たないという条件(ステップS4)の2つの条件を同時に満たす状態が所定時間継続したときに図2に示すコントローラ75がエンジン51を停止させる、と考えても良い。なお、この変形例と上記実施形態とは実質的には同一である(ステップS2の条件を満たした状態で、ステップS4の条件を満たすか否かが切り換わることはないため)。
【0047】
図1に示すように、上記実施形態ではガントリ40を用いてブーム20を起伏したが、ブーム20を起伏させる構成は様々に変形できる。具体的には例えば、箱型のブーム20をシリンダ(図示なし)で起伏させても良い。この場合は、例えばシリンダにかかる荷重等を検出すること等によりアタッチメント30の荷重を検出する。また例えば、ガントリ40とブーム20との間に設けたマスト(図示なし)でブーム20を起伏させても良い。この場合は、例えばマストとブーム20とを連結するガイライン(図示なし)の張力等を検出すること等によりアタッチメント30の荷重を検出する。
【符号の説明】
【0048】
1 クレーン
10 クレーン本体
51 エンジン
60 複数のアクチュエータ
20 ブーム
61 ウインチアッセン(複数のアクチュエータのうち一部のアクチュエータ)
25 巻上げロープ
30 アタッチメント
71 センサ(アクチュエータ作動検出手段)
72 荷重検出手段
75 コントローラ(エンジン制御手段)
73 アタッチメント自重セット手段
【技術分野】
【0001】
本発明は、所定の条件を満たした場合にエンジンを停止させるクレーンに関する。
【背景技術】
【0002】
従来より、アイドリングストップ機能を備えたクレーンがある(例えば特許文献1)。この種のクレーンでは、所定の条件を満たした場合にエンジンを自動停止させることで、クレーンの燃費低減、排気や騒音の低減などを図っている。
【0003】
特許文献1に記載の技術では、「クレーン操作が無い状態」と「吊荷が無い状態」とが同時に予め設定された時間継続したときにエンジンを停止する(アクセル操作が無い状態を上記の条件に加える場合もある)。
【0004】
上記技術では、吊荷が無い状態をエンジンの自動停止の条件としている。これにより、吊荷を吊った状態でエンジンが自動停止するという危険を回避している。なお、上記技術における「吊荷が無い状態」とは、ブーム先端に負荷される吊上げ荷重が、吊荷用フックの重量と同じになった状態である(特許文献1の段落0015参照)。また、フックは、様々な種類があるアタッチメントのうちの一つである(詳細は後述)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−62782号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術では、アタッチメントが煽られる可能性があるにもかかわらず、エンジンが自動停止するという危険が生じるおそれがある。
【0007】
さらに詳しくは、ブームから吊り下げられている(着地等していない)アタッチメントは、例えば風などで煽られる場合がある。特に、タワークレーンのように高所での作業を行うクレーンではアタッチメントが大きく煽られる場合がある。煽られたアタッチメントの周辺に作業者がいる場合、アタッチメントが作業者に危険をもたらすおそれがある。そこで、この危険を回避するために、クレーンの旋回、アタッチメントの巻上げ又は巻下げ等の操作を行うことが考えられる。しかし、上記技術では、アタッチメントがブームから吊り下げられている(着地等していない)状態でも、上記の所定の条件を満たしてエンジンが自動停止する場合がある。エンジンが自動停止した場合は、上記の危険を回避する操作が迅速に行えない。
【0008】
また、特許文献1に記載の技術では、アタッチメントがフリーフォール状態であるにもかかわらず、エンジンが自動停止するという危険が生じるおそれがある。
【0009】
さらに詳しくは、上記技術では、クレーン操作が無い状態をエンジン停止の条件の一つとしている。上記技術における「クレーン操作が無い状態」とは、クレーン操作手段(具体的には操作レバー)の操作が無い状態である(特許文献1の請求項1及び段落0016参照)。クレーン操作手段は、エンジンを動力源としてアクチュエータを駆動させるときに操作されるものである(同部分参照)。
【0010】
ここで、アタッチメントをフリーフォール状態(詳細は後述)とする場合がある。この場合は、クレーン操作手段は操作されない(操作レバーはニュートラル状態である)。このとき、上記技術では、「クレーン操作が無い状態」の条件を満たす。さらに他の条件も満たした場合は、アタッチメントがフリーフォール状態であるにもかかわらず、エンジンが自動停止してしまう。特に、アタッチメントの揚程が高い状態からアタッチメントをフリーフォール状態にする場合、クレーン操作手段を操作しない状態が比較的長時間続くため、上記技術の「予め設定された時間継続したとき」の条件を満たし、その結果、フリーフォール状態でエンジンが自動停止するおそれがある。
【0011】
そこで本発明は、アタッチメントが安全な状態のときにエンジンの自動停止を行うことができるクレーンを提供することを目的とする。
【課題を解決するための手段及び効果】
【0012】
第1の発明のクレーンは、クレーン本体と、前記クレーン本体に設けられたエンジンと、前記エンジンを動力源として駆動される複数のアクチュエータと、前記クレーン本体に取り付けられたブームと、前記複数のアクチュエータのうち一部の前記アクチュエータに巻かれた巻上げロープを介して前記ブームから吊り下げられるアタッチメントと、前記複数のアクチュエータが動いているか否かを検出するアクチュエータ作動検出手段と、前記アタッチメントの荷重を検出する荷重検出手段と、前記エンジンを制御するエンジン制御手段と、を備える。前記エンジン制御手段は、前記複数のアクチュエータがいずれも動いていないことを前記アクチュエータ作動検出手段が検出している状態が所定時間継続し、かつ、前記荷重検出手段が検出した荷重が前記アタッチメントの自重より小さい場合に前記エンジンを停止させる。
なお、「アクチュエータが動いている」には、エンジンを動力源としてアクチュエータが駆動されている状態だけでなく、アタッチメントがフリーフォール状態の場合のように、エンジンを動力源とせずアクチュエータが作動している状態も含む。
【0013】
このクレーンは、複数のアクチュエータのうち一部のアクチュエータに巻かれた巻上げロープを介して、ブームから吊り下げられるアタッチメントを備える。また、「複数のアクチュエータがいずれも動いていないことをアクチュエータ作動検出手段が検出している」ことをエンジン制御手段によるエンジンの停止の条件に含む。この条件を満たす場合は、巻上げロープが巻かれたアクチュエータが動いていないので、巻上げロープを介してブームから吊り下げられたアタッチメントも動いていない。すなわち、この条件を満たす場合は、アタッチメントはフリーフォール状態でない(状態A)。
また、このクレーンは、アタッチメントの荷重を検出する荷重検出手段を備える。また、「荷重検出手段が検出した荷重がアタッチメントの自重より小さい」ことをエンジン制御手段によるエンジンの停止の条件に含む。この条件を満たす場合は、アタッチメントの揚程が0の状態であるので、アタッチメントが煽られない(状態B)。
このクレーンでは、上記の状態Aかつ状態Bを満たす場合にエンジン制御手段がエンジンを停止させる。したがって、アタッチメントが安全な状態のときにエンジンの自動停止を行うことができる。
【0014】
第2の発明のクレーンは、前記アタッチメントの前記自重を設定するアタッチメント自重セット手段を備える。
【0015】
このクレーンでは、アタッチメントの仕様が変わったときでも、アタッチメント自重セット手段でアタッチメントの自重を設定すれば、第1の発明を確実に実施できる。
【図面の簡単な説明】
【0016】
【図1】クレーンの全体図である。
【図2】図1に示すクレーンが備えるエンジン制御手段周辺のブロック図である。
【図3】図2に示すエンジン制御手段の動作のフローチャートである。
【発明を実施するための形態】
【0017】
以下、図1〜図3を参照してクレーン1の実施形態を説明する。
クレーン1は、図1に示すように、油圧式の移動式クレーンであり、具体的には例えばラチスブームクローラクレーン(LBCC)等である。クレーン1は、所定の条件を満たしたときにエンジン51が自動的に停止する機能(アイドリングストップ機能)を備える。クレーン1は、クレーン本体10と、クレーン本体10に取り付けられたブーム20と、ブーム20から吊り下げられるアタッチメント30と、クレーン本体10に取り付けられたガントリ40とを備える。また、図2に示すように、クレーン1は、クレーン本体10(図1参照)に設けられたエンジン51と、エンジン51に駆動される油圧ポンプ52と、油圧ポンプ52に接続されたコントロールバルブ53と、コントロールバルブ53に接続された複数のアクチュエータ60(図2では1つのみ図示)と、エンジン51を制御するコントローラ75(エンジン制御手段)とを備える。さらに、クレーン1(図1参照)は、コントローラ75にそれぞれ接続された、センサ71(アクチュエータ作動検出手段)と、荷重検出手段72と、アタッチメント自重セット手段73とを備える。
【0018】
クレーン本体10は、図1に示すように、下部本体11と、下部本体11の上方に取り付けられた上部本体13とを備える。下部本体11は、例えばクローラ式走行体である(ホイール式走行体でも良い)。上部本体13は、下部本体11の上方に旋回ベアリング12を介して取り付けられ、下部本体11に対して旋回可能である。
【0019】
ブーム20は、クレーン本体10に取り付けられる。ブーム20は、巻上げロープ25を介してアタッチメント30を吊り下げる部材であり、例えばラチスブームである(箱型の伸縮式ブームでも良い)。ブーム20は、上部本体13の前端部に起伏可能に取り付けられる。ブーム20の先端には補ジブ(図示なし)を取り付けても良い。ブーム20は先端部にブームシーブ21を備える。
【0020】
ブームシーブ21は、巻上げロープ25の掛け渡しや掛け回しをするための滑車であり、ブーム20に複数設けられる。複数のブームシーブ21には、ブーム20の背面に配置されたアイドラシーブ22と、ブーム20の先端部の前面側に配置されたポイントシーブ23とがある。
【0021】
巻上げロープ25は、アタッチメント30を巻上げ及び巻下げするためのワイヤである。巻上げロープ25の一端側は、ウインチアッセン61(複数のアクチュエータ60のうち一部のアクチュエータ)のウインチドラム61d(図2参照)に巻かれる。巻上げロープ25の他端側は、アタッチメント30が備えるシーブ(図示なし)とポイントシーブ23との間に掛け回される(巻上げロープ25のうち、ポイントシーブ23から吊り下げられた部分を「巻上げロープ25a」とする)。巻上げロープ25はアイドラシーブ22に掛け渡される。
【0022】
アタッチメント30は、巻上げロープ25(25a)を介してブーム20から吊り下げられる部材である。アタッチメント30には、クレーン作業用の吊荷等を吊るためのフック、または、土木作業用のアタッチメント(図示なし)などがある。フックには、クレーン1の吊上げ能力等に応じた様々な種類のものがある。土木作業用のアタッチメントには、例えばバイブロハンマやクラムシェルバケット等がある。
【0023】
このアタッチメント30は、巻上げ及び巻下げされる。すなわち、ウインチアッセン61により巻上げロープ25が巻き込み及び巻き出しされることで、アタッチメント30の揚程Hが変化する。アタッチメント30の揚程Hとは、アタッチメント30の直下の基準面Dからアタッチメント30の下端までの高さ(変化量)である。基準面Dは、具体的には地面(地上または地下)や海面などである。なお、アタッチメント30の直下の地面が地下(下部本体11よりも下方側)にある場合の基準面D1及び揚程H1を、図1における二点鎖線で示す。
【0024】
ガントリ40は、ブーム20を起伏させるための部材であり、例えば箱型の構造物により構成される。ガントリ40は、ブーム20の後方側に配置され、クレーン本体10に取り付けられる。ガントリ40の先端部とブーム20の先端部とが、起伏ロープ45及びガイライン46で接続される。ガントリ40の先端部に、起伏ロープ45を掛けるガントリシーブ41が設けられる。そして、起伏ロープ45を起伏用ウインチアッセン62(複数のアクチュエータ60の一部)で巻き込み及び巻き出しすることで、ブーム20が起伏する。なお、ブーム20を起伏するための構成は他の構成に変形しても良い。
【0025】
エンジン51(図2参照)は、複数のアクチュエータ60の動力源であり、クレーン本体10に設置される。図2に示すように、エンジン51は、油圧ポンプ52を駆動する。油圧ポンプ52は、コントロールバルブ53を介してアクチュエータ60に作動油を供給(吐出)する。
【0026】
コントロールバルブ53は、油圧ポンプ52から複数のアクチュエータ60(図2では1つのみ図示)に供給される作動油の流量を制御する。コントロールバルブ53は、図示しないクレーン操作手段(操作レバーなど)の操作に応じて作動する。すなわち、クレーン操作手段の操作に応じて、複数のアクチュエータ60が作動する。
【0027】
複数のアクチュエータ60は、エンジン51を動力源として駆動される、油圧式アクチュエータである。図1に示すように、複数のアクチュエータ60には、例えば、ウインチアッセン61、起伏用ウインチアッセン62、上部本体13の旋回用の油圧モータ(図示なし)、及び、下部本体11の走行用の油圧モータ(図示なし)等がある。
【0028】
ウインチアッセン61(複数のアクチュエータ60のうち一部のアクチュエータ)は、巻上げロープ25の巻き込み及び巻き出しをするアクチュエータである。ウインチアッセン61は、例えば上部本体13に配置される(ブーム20に配置しても良い)。図2に示すように、ウインチアッセン61は、油圧モータ61m(巻上げモータ)と、油圧モータ61mに連結可能なウインチドラム61d(巻上げドラム)とを備える。油圧モータ61mは、油圧ポンプ52から吐出された作動油により駆動される。ウインチドラム61dには、巻上げロープ25(図1参照)が巻かれる。
【0029】
また、ウインチアッセン61は次のように動作する。
油圧モータ61mとウインチドラム61dとが連結された状態で、油圧モータ61mを駆動すると、ウインチドラム61dが回転する。その結果、ウインチドラム61dに巻かれた巻上げロープ25(図1参照)が巻き込み及び巻き出しされる。
また、油圧モータ61mとウインチドラム61dとの連結を切り離した状態にすると、ウインチドラム61dが回転自由となる。このとき、図1に示すアタッチメント30の揚程Hが0でない場合、アタッチメント30はフリーフォール状態になる(自由落下する)。すなわち、図2に示すエンジン51の動力(油圧モータ61mの動力)を用いずに、ウインチアッセン61(アクチュエータ60)が動いている状態となる。
【0030】
起伏用ウインチアッセン62(アクチュエータ)は、図1に示すように、起伏ロープ45を巻き込み及び巻き出しするアクチュエータである。起伏用ウインチアッセン62は、油圧モータ(ブームモータ、図示なし)と、この油圧モータに連結されたウインチドラム(ブームドラム、図示なし)とを備える。起伏用ウインチアッセン62は、例えば上部本体13に配置される(ガントリ40に取り付けても良い)。
【0031】
センサ71(アクチュエータ作動検出手段)は、図2に示すように、複数のアクチュエータ60が動いているか否かを検出する装置である。センサ71は、クレーン本体10(図1参照)に対してアクチュエータ60が動いているか否かを、複数のアクチュエータ60それぞれについて検出する。複数のセンサ71はそれぞれ、コントローラ75に接続され、検出結果をコントローラ75に出力する(図2では複数のセンサ71のうち1つのみ図示している)。センサ71は、アクチュエータ60がウインチアッセン61の場合、ウインチドラム61dの回転を検出する。この場合のセンサ71は、例えばウインチドラム61dの回転を非接触で検知する近接センサ(回転センサ)等である。
【0032】
このセンサ71が検出する「アクチュエータ60が動いている」状態には、エンジン51を動力源としてアクチュエータ60が駆動されている状態だけでなく、エンジン51を動力源とせずアクチュエータ60が作動している状態も含む。具体的には、アクチュエータ60がウインチアッセン61の場合、油圧モータ61mは駆動されていないがウインチドラム61dが回転しているとき、すなわち、図1に示すアタッチメント30がフリーフォール状態のときは、ウインチアッセン61は動いている状態である。
なお、クレーン1での作業時に、クレーン操作手段(操作レバーなど)を操作しなければ動くことがないアクチュエータ60(例えば、起伏用ウインチアッセン62、旋回用や走行用のアクチュエータなど)については、クレーン操作手段が出力した操作信号の有無を検出し、その結果としてアクチュエータ60が動いているか否かを検出しても良い。
【0033】
荷重検出手段72(図2参照)は、アタッチメント30(図1参照)の荷重を検出する。図2に示すように、荷重検出手段72は、コントローラ75に接続され、検出した荷重をコントローラ75に出力する。例えば、荷重検出手段72は、図1に示す巻上げロープ25の張力を検出する装置を備え、具体的には例えばアイドラシーブ22に設けたロードセル等を備える。また例えば、荷重検出手段72(図2参照)は、起伏ロープ45やガイライン46の張力を検出する装置を備え、具体的には例えばガントリシーブ41に設けたロードセル等を備える。なお、荷重検出手段72(図2参照)が検出するアタッチメント30の荷重は、上記のロードセル等の装置により検出された前記張力から、ロープの自重による荷重(巻上げロープ25a部分の荷重など)を引いた値である。ただし、ロープの自重による荷重がアタッチメント30の荷重よりも十分小さい場合は、ロープの自重による荷重は無視しても良い。
【0034】
アタッチメント自重セット手段73は、「アタッチメント30(図1参照)の自重」を設定する。図2に示すように、アタッチメント自重セット手段73はコントローラ75に接続され、アタッチメント30(図1参照)の自重をコントローラ75に設定(セット)する。アタッチメント自重セット手段73は、例えば次のように用いる。図1に示すアタッチメント30の仕様を変更する際(作業前)に、変更後のアタッチメント30をブーム20から吊上げた状態(揚程Hが0より大きい状態)にする。この状態で、変更後のアタッチメント30の荷重を図2に示す荷重検出手段72で検出する。荷重検出手段72は検出結果をアタッチメント自重セット手段73に出力する。アタッチメント自重セット手段73は、入力された検出結果に基づき、アタッチメント30の自重をコントローラ75に設定する。なお、アタッチメント自重セット手段73は、手動で入力したアタッチメント30の自重をコントローラ75に設定する装置でも良い。
【0035】
コントローラ75(エンジン制御手段)は、エンジン51を制御する装置である。コントローラ75は、エンジン51に接続され、エンジン51に停止の指令を出力する。コントローラ75は、所定の条件を満たしたときにエンジン51を停止させる機能(アイドリングストップ機能)を備える。
【0036】
(エンジン制御手段の動作)
このコントローラ75の動作のフローチャートを図3に示す(以下では、上述したクレーン1の各構成要素については図1及び図2参照)。コントローラ75の動作の概略は次のとおりである。すなわち、アクチュエータ60が動いていないことをセンサ71が検出している状態が所定時間継続し(ステップS2及びS3)、かつ、荷重検出手段72が検出した荷重がアタッチメント30の自重より小さい場合に(ステップS4)、エンジン51を停止させる(ステップS5)。以下、エンジン51が作動していることを初期条件として(ステップS1参照)説明する。
【0037】
ステップS2では、アクチュエータ60が動いていないか判定する。さらに詳しくは、ステップS2では、複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出しているか否かを判定する(「アクチュエータ60が動いている」状態の詳細についてはセンサ71の説明を参照)。ステップS2では、具体的には、アタッチメント30が巻上げも巻下げもされておらず(フリーフォール状態でもない)、かつ、他のクレーン操作(ブーム20の起伏、旋回や走行など)もされていない状態であるか否かを判定する。アクチュエータ60が動いていない場合は、ステップS3に進む。アクチュエータ60が動いている場合は、エンジン51の回転を継続する(ステップS6)。なお、「エンジン51の回転を継続する」とは、アイドリングストップ機能に基づくエンジン51の停止をしないことを意味する(例えば、エンジンキーの操作等によりエンジン51が停止する場合はありうる)。
【0038】
ステップS3では、ステップS2の条件を満たす状態(複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している状態)が所定時間継続しているか否かを判定する。所定時間継続していない場合は、エンジン51の回転を継続する(ステップS6)。所定時間継続している場合は、ステップS4に進む。
【0039】
ステップS4では、荷重検出手段72が検出したアタッチメント30の荷重が、アタッチメント30の自重より小さいか否かを判定する。すなわち、ステップS4では、アタッチメント30の揚程Hが0か否かを判定する。アタッチメント30の荷重がアタッチメント30の自重以上の場合はエンジン51の回転を継続(ステップS6)し、自重より小さい場合はエンジンを停止(ステップS5)して処理を終了する。
なお、ステップS4では、アタッチメント30の荷重が所定値よりも小さいか否かを判定しても良い。前記所定値は、アタッチメント30の自重より小さい値である(アタッチメント30の自重に基づいて定めた値である)。すなわち、ステップS4では、アタッチメント30の荷重がアタッチメント30の自重に、いわば大きく満たないか否かを判定しても良い。このような判定を行った場合、アタッチメント30の揚程Hが0であることをより確実に判定できる。
【0040】
(本実施形態のクレーンの特徴)
(特徴1)
このクレーン1は、図1に示すように、ウインチアッセン61のウインチドラム61d(図2参照)に巻かれた巻上げロープ25を介して、ブーム20から吊り下げられるアタッチメント30を備える。また、ステップS2(以下、ステップS2〜S5については図3参照)の判断を行う。すなわち、図2に示す「複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している」ことをコントローラ75によるエンジン51の停止(ステップS5)の条件に含む。
このステップS2の条件を満たす場合は、図1に示すウインチアッセン61のウインチドラム61d(図2参照)が動いていないので、巻上げロープ25を介してブーム20から吊り下げられたアタッチメント30も動いていない。すなわち、ステップS2の条件を満たす場合は、アタッチメント30はフリーフォール状態でない(状態A)。
【0041】
また、このクレーン1は、アタッチメント30の荷重を検出する荷重検出手段72(図2参照)を備える。また、ステップS4の判断を行う。すなわち、図2に示す「荷重検出手段72が検出した荷重がアタッチメント30(図1参照)の自重より小さい」ことをコントローラ75によるエンジン51の停止の条件に含む。
ステップS4の条件を満たす場合は、図1に示すアタッチメント30の揚程Hが0の状態である。すなわち、アタッチメント30を基準面D(地上等)に預けた状態である。言い換えれば、アタッチメント30は、巻上げロープ25を介してブーム20から吊り下げられていることのみによって支持された状態ではなく、基準面Dに支持された状態である。この状態では、アタッチメント30が煽られない(状態B)。
【0042】
このクレーン1では、上記の状態Aかつ状態Bを満たす場合に図2に示すコントローラ75がエンジン51を停止させる(ステップS5)。したがって、アタッチメント30(図1参照)が安全な状態のときにエンジン51の自動停止を行うことができる。
【0043】
なお、このクレーン1は、従来の技術と同じようなアイドリングストップ機能を備える。さらに詳しくは、クレーン1は、エンジン51を動力源として駆動される複数のアクチュエータ60を備える。また、ステップS2及びS3の判断を行う。すなわち、「複数のアクチュエータ60がいずれも動いていないことをセンサ71が検出している状態が所定時間継続する」ことをコントローラ75によるエンジン51の停止の条件に含む。
ステップS2の条件を満たす場合は、複数のアクチュエータ60がいずれも動いていないので、複数のアクチュエータ60を駆動するためのエンジン51の作動は必要ない。さらに、この状態が所定時間継続している場合(ステップS3)は、クレーン1の操縦者(オペレータ)にアクチュエータ60を操作する意思が無い可能性が高い。これらステップS2及びS3の条件を満たしたときにエンジン51が自動停止する場合がある(ステップS5)。よって、エンジン51のアイドリングを適切なときに停止させることができ、その結果、クレーン1の燃費の低減(動力削減)、排気や騒音の低減ができる。
【0044】
また、このクレーン1では、土木作業用のアタッチメント30(図1参照)を備える場合も上記の効果を奏する。
なお、特許文献1に記載の従来技術では、エンジン51(図2参照)の自動停止の条件に「吊荷が無い状態」を含む。上記従来技術において、土木作業用のアタッチメント30のうちフックを除く部分(例えばバイブロハンマ等)を「吊荷」と考えれば上記条件を満たさないのでエンジン51は自動停止しない。また、前記部分をアタッチメント30の一部と考えても、上述したようにアタッチメント30が煽られるという危険が生じるおそれがある。
【0045】
(特徴2)
このクレーン1は、アタッチメント30(図1参照)の自重を設定するアタッチメント自重セット手段73(図2参照)を備える。よって、アタッチメント30の仕様が変わったときでも、アタッチメント自重セット手段73でアタッチメント30の自重を設定すれば、特徴1に記載の効果を確実に奏する。
【0046】
(変形例)
上記実施形態では、図3に示すステップS2〜S4の条件判断をしたが、本発明の効果を奏する範囲内で条件判断の順や内容を変えても良い。例えば、アクチュエータ60(図1参照)が動いていないという条件(ステップS2)、及び、検出された荷重がアタッチメント30(図1参照)の自重に満たないという条件(ステップS4)の2つの条件を同時に満たす状態が所定時間継続したときに図2に示すコントローラ75がエンジン51を停止させる、と考えても良い。なお、この変形例と上記実施形態とは実質的には同一である(ステップS2の条件を満たした状態で、ステップS4の条件を満たすか否かが切り換わることはないため)。
【0047】
図1に示すように、上記実施形態ではガントリ40を用いてブーム20を起伏したが、ブーム20を起伏させる構成は様々に変形できる。具体的には例えば、箱型のブーム20をシリンダ(図示なし)で起伏させても良い。この場合は、例えばシリンダにかかる荷重等を検出すること等によりアタッチメント30の荷重を検出する。また例えば、ガントリ40とブーム20との間に設けたマスト(図示なし)でブーム20を起伏させても良い。この場合は、例えばマストとブーム20とを連結するガイライン(図示なし)の張力等を検出すること等によりアタッチメント30の荷重を検出する。
【符号の説明】
【0048】
1 クレーン
10 クレーン本体
51 エンジン
60 複数のアクチュエータ
20 ブーム
61 ウインチアッセン(複数のアクチュエータのうち一部のアクチュエータ)
25 巻上げロープ
30 アタッチメント
71 センサ(アクチュエータ作動検出手段)
72 荷重検出手段
75 コントローラ(エンジン制御手段)
73 アタッチメント自重セット手段
【特許請求の範囲】
【請求項1】
クレーン本体と、
前記クレーン本体に設けられたエンジンと、
前記エンジンを動力源として駆動される複数のアクチュエータと、
前記クレーン本体に取り付けられたブームと、
前記複数のアクチュエータのうち一部の前記アクチュエータに巻かれた巻上げロープを介して前記ブームから吊り下げられるアタッチメントと、
前記複数のアクチュエータが動いているか否かを検出するアクチュエータ作動検出手段と、
前記アタッチメントの荷重を検出する荷重検出手段と、
前記エンジンを制御するエンジン制御手段と、を備え、
前記エンジン制御手段は、
前記複数のアクチュエータがいずれも動いていないことを前記アクチュエータ作動検出手段が検出している状態が所定時間継続し、かつ、前記荷重検出手段が検出した荷重が前記アタッチメントの自重より小さい場合に前記エンジンを停止させる、クレーン。
【請求項2】
前記アタッチメントの前記自重を設定するアタッチメント自重セット手段を備える、請求項1に記載のクレーン。
【請求項1】
クレーン本体と、
前記クレーン本体に設けられたエンジンと、
前記エンジンを動力源として駆動される複数のアクチュエータと、
前記クレーン本体に取り付けられたブームと、
前記複数のアクチュエータのうち一部の前記アクチュエータに巻かれた巻上げロープを介して前記ブームから吊り下げられるアタッチメントと、
前記複数のアクチュエータが動いているか否かを検出するアクチュエータ作動検出手段と、
前記アタッチメントの荷重を検出する荷重検出手段と、
前記エンジンを制御するエンジン制御手段と、を備え、
前記エンジン制御手段は、
前記複数のアクチュエータがいずれも動いていないことを前記アクチュエータ作動検出手段が検出している状態が所定時間継続し、かつ、前記荷重検出手段が検出した荷重が前記アタッチメントの自重より小さい場合に前記エンジンを停止させる、クレーン。
【請求項2】
前記アタッチメントの前記自重を設定するアタッチメント自重セット手段を備える、請求項1に記載のクレーン。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−131635(P2012−131635A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2010−287333(P2010−287333)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(304020362)コベルコクレーン株式会社 (296)
【Fターム(参考)】
[ Back to top ]