
クロマトグラフィーカラム及び保守方法
分解のためにホイスト又はクレーンを使用することを必要としない、クロマトグラフィーカラムの保守方法が説明される。この方法は、カラム内の懸吊されている又は支持されている荷重の下で操作者が作業することの必要性を減らすことにより、操作者の安全を向上させる。カラムに可逆的に取り付けられ得るガイド要素を準備することにより、カラム構成要素を取り外すこと及び挿入することが容易になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、クロマトグラフィーカラム、及び工業規模のクロマトグラフィーにおいてカラムを操作するための方法に関する。詳細には、本発明は、クロマトグラフィーカラムと、これらのカラムに対して保守及び点検を行うために、カラムを分解するためのホイスト又はクレーンなどの揚重装置を必要とすることなく、ベッド支持体及び/又は分配器などのカラム構成要素を取り外したり交換したりする安全な方法とに関する。
【背景技術】
【0002】
クロマトグラフィーカラムは、工業プロセスにおいて処理液を精製して処理液から対象の物質を分離するのに使用され得、一般的な例には、ファインケミカル及び薬剤さらには生物学的生成物の大規模な予備精製が含まれる。
【0003】
工業規模のクロマトグラフィーカラムは、通常、上側端部に液体入口を含む軸方向垂直の中空の管状ハウジングであって、緩衝液及び分離すべき物質がこのハウジングを介してその管のキャビティ内に位置する媒体ベッドに分注される、管状ハウジングと、物質及び緩衝液を収集するための、下側端部にある液体収集システムとを有する。緩衝液流体並びに/又は分離及び精製される物質が濾過されるときに通る粒子状のクロマトグラフ媒体又はベッドが、液体入口と収集システムとの間に配置される。
【0004】
通常、アダプタ組立体が管状ハウジングの上側端部に取り付けられ、ベース組立体が下側端部に取り付けられ、ここではベース組立体は下部フランジにボルト止めされる。これらの組立体のそれぞれは、通常、強固なバッキングプレートと、ベッド支持体をさらに支持する分配器とを有する。ベッド支持体は、メッシュ、フィルタ、焼結品、スクリーン、又は、別の流体浸透性の媒体保持用材料の層であり、これは、粒子状媒体のベッドを保持しながら、処理液がクロマトグラフィーベッド空間又はキャビティに流入したりそこから流出したりするのを可能にする。ベッドの高さ及びベッドの圧縮量を調整可能にして制御できるようにするために、アダプタ組立体は、通常、カラム管内部でピストン又は摺動アダプタの形態となるように作られる。通常ノズルを介してカラムがベッド媒体に装入された後、アダプタが管の下部に向かって押し込まれ得、それにより媒体ベッドが圧縮又は加圧される。一般に、ベース組立体は、カラム管の下部フランジに対してボルト止めされるような固定構造であるが、一部の例では、移動可能な摺動可能ピストン又はアダプタの形態であってもよい。
【0005】
ベース組立体のバッキングプレートは、概して、カラムのための支持体として機能し、それ自体は脚部の上で支持されるか、又は、ベース組立体の下方に突出する出口配管のためのクリアランスを作ることができる何らかの別のスタンド構成の上で支持される。
【0006】
このようなカラムが、弁、シール、ベッド支持体、分配システムなどの内部構成要素を保守、洗浄又は点検することを必要とする場合、上側端部/アダプタ組立体をカラム管から離して持ち上げさらにはカラム管を下側端部/ベース組立体から離して持ち上げるためには、これらの組立体が3トンを越える重量を有する場合もあることから、クレーン又はホイストなどの揚重機が必要となる。内部の保守及び点検を実施する際に、カラムを分解するためにオーバーヘッド揚重機を使用することは望ましくない。重い装置が頭上に持ち上げられ、技術者が下方に露出される場合、操作者の安全が明らかに問題となる。また、精密な構成要素が損傷するのを回避するために、互いに分離されているときにカラム及びそのベース組立体/アダプタ組立体を軸方向に位置合わせした状態で維持するのに、位置合わせ構造物が必要となる。
【0007】
このような位置合わせ構造物及び持ち上げ構造物が存在することは、管の周りにおいて非常に邪魔であり、また、内部構成要素を挿入したり/取り外したりするために周囲のある箇所において十分なクリアランスが得られるように慎重にレイアウトを行うことの必要性を生じさせる。また、揚重装置を使用することの必要性により、カラムなどのハウジングは制約を受けることにより、ホイスト又はクレーンを受け入れるために十分な頭上空間及び支持が必要となる。現在、微生物汚染を回避するために、多くのクロマトグラフィーカラムが、GMPの下で、頭上装置を受け入れることが非常に困難であるような「クリーンな」環境で稼動されていることから、分解及び保守のためのカラムを別の部屋に移動させることが必要であることは問題である。カラムを使用するためにクリーンな環境内へと戻す前にカラムを洗浄及び検査することが必要であることにより、この問題がより悪化する。したがって、生物薬剤を製造するのに使用されるGMP施設内にホイスト又はクレーンが存在することは、上記の理由より、さらには、これらの機械がそれらの作動中及び保守中に塵の形態の粒子状物質を放出するという事実より、非常に望ましくない。
【0008】
米国特許第6736974号では、カラムに一体化された液圧システムを用いてアダプタ組立体をカラム管の上方に持ち上げることができる及び/又はカラム管をベース組立体の上方に上昇させることができるカラムを提供することにより、上記の問題の一部に対処している。
【0009】
しかし、米国特許第6736974号に記載されているシステムには、その設計のために重大な欠点がある。米国特許第6736974号の図4及び5から分かるように、また、その文献の第4欄、63〜66行目に記載されているように、分配器プレート(31)及び/又はメッシュ(28/60)がカラムの内部から取り外す際、操作者は、これらの構成要素部品を固定している固定用ナット(30)にアクセスしてそれを取り外すために、ドラム(18)の中央領域内で作業しなければならない。工業用カラムが約200mm〜2000mmに及ぶような、通常は600mm〜1400mmの範囲内にある直径を有し得ることから、上記のことは、作業者が、ナットを外すために、懸吊されている又は支持されている荷重の下方で作業しなければならないことを意味する。このことは、特に、操作者の腕又は頭部が懸吊されている又は支持されている荷重の下方に露出されている場合に、操作者に安全性に関する著しいリスクをもたらす。
【0010】
さらに、カラム管/シリンダ又はアダプタ組立体をそれぞれベース組立体又は管から持ち上げた後で、重いベッド支持体及び/又は分配器をカラムから取り外すことは、液圧駆動ピストン又は安全棒を迂回することを目的としてベッド支持体又は分配器を傾斜させることでしか行われ得ない。これは例えば米国特許第6736974号の図3、4及び5から明確に分かるが、ここでは、任意の2つの安全棒(69)の間の距離又は任意の2つの液圧ピストン(36)の間の距離がメッシュ(28/60)又は分配器プレート(31)の直径より短くなっている。ベース又はアダプタベッド支持体(図示せず)にも同じ問題がある。重量が100kgを超える可能性があるこれらの内部構成要素を取り外すには、操作者による多くの人力作業が必要となり、懸吊されているカラム又はアダプタ組立体の下方に操作者が余儀なく露出される。このことでも、操作者に安全性に関する著しいリスクがもたらされる。
【0011】
米国特許第6736974号に記載されるような、重いベッド支持体又は分配器を物理的に取り外す作業は操作者によって実施されなければならず、この作業を支援するためのいかなる持ち上げ補助装置の使用も開示されていない。液圧ピストン及び安全棒の構成、並びに、ベッド支持体及び/又は分配器をカラムから回収する際に支持構造物に衝突するのを回避するためにベッド支持体及び/又は分配器を傾斜させる必要性のために、特別製の持ち上げ装置の設計が必要となるであろう。
【0012】
さらに、米国特許第6736974号に記載される方法は、カラムの保守を実施するために、カラム管/シリンダ又はアダプタ組立体をそれぞれベース組立体又は管から、3インチ(7.62cm)を超える所定の距離持ち上げることを必要とし、6インチ(15.2cm)を超える距離が具体的に示されており、最も好適には12インチ(30.5cm)を超える距離が具体的に示されている。
【0013】
また、WO2005/056156(Euroflow(UK)Limited)も、クレーン又はホイストを必要とせずに、保守を行うためにアクセスされ得るカラムを開示している。このカラムは、管及びベース組立体が液圧駆動シリンダによって分離されてそれによりそれらの間にアクセス空間が形成されてそれによりベース組立体上で保守又は補修を行うことが可能となるように、設計されている。アダプタ組立体のピストンは、保守を行うために、カラム管の開放端部のところすなわち管とベース組立体との間の空間内で露出されるように、カラム管を通して前進され得る。
【0014】
しかし、この文献から明らかなように(例えば、図19及び図20、並びに、23ページの関連する記述)、ベッド支持体又はメッシュを定位置で保持する締結用ねじを開放するためのアクセスは、管とベース組立体との間の空間によって可能となる。ベッド支持体を取り外すには、保持用ねじを取り外す間において操作者が懸吊されている荷重に露出されることが必要となる。さらに、保守時のアクセスための任意の2つの駆動シリンダの間の距離がベッド支持体の直径より短いため(例えば、図7を参照)、ベッド支持体を取り外すか又は交換する際、操作者が人力作業でベッド支持体を取り扱うこと及びベッド支持体を傾斜させることが必要となる。したがって、カラムを保守する際に、操作者に安全性に関する著しいリスクがもたらされる。
【0015】
参照によりその内容が組み込まれる、本出願人の同時係属中の米国特許出願11/763477号(米国公開番号2008−0308498)及びPCT/SE2009/000011(国際公開番号WO2009/093952)が、分解を行うためにクレーン又はホイストを必要としないクロマトグラフィーカラム及び保守方法を記載している。これらの特許出願に記載される保守方法は、操作者がカラム内において懸吊されている荷重又は支持されている荷重の下方で作業することの必要性を軽減することにより、操作者の安全を改善することを可能にしている。しかし、これらの文献に記載されている方法によりベッド支持体を取り外したり挿入したりすることは、取り外しプロセス又は設置プロセスにおいて別のカラム構成要素に接触して損傷するのを回避するために、操作者によるかなりの技量及び/又は体力を必要とする。持ち上げ装置を使用することを必要とする場合があるこれらのプロセスは、製造機器一式(production suite)内のフロアが平坦ではなかったり傾斜していたりすることにより妨害される可能性がある。さらに、管及びベース、又は、アダプタ組立体及び管は、取り外し又は設置を行うために持ち上げ装置のアームがアクセスするのを可能にするために十分な距離離されて持ち上げられなければならず、これはシリンダのストローク長さ及びコストの両方が影響に与える。したがって、操作者にとって使用することがより安全でより容易であるような、また、懸吊されている荷重又は支持されている荷重に対して操作者を露出させることがなくしたがって操作者のエラーのリスク及び負傷のリスクを軽減するような、代替の高コスト効率の保守及び/又は点検方法を提供することが依然として必要である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】国際公開第2009/093952(A1)号
【発明の概要】
【発明が解決しようとする課題】
【0017】
本発明はこれらの必要性及び他の必要性を認識してそれらに対処する。
【課題を解決するための手段】
【0018】
本発明の第1の態様では、クロマトグラフィーカラム又はその部品に対して保守を行うための方法が提供され、この方法は、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体を備える管であって、上記アダプタ組立体が作動モードにおいて上記管のキャビティ内で移動可能であり、
アダプタ組立体が、解放可能な固定手段によって互いに締結される、バッキングプレート、分配器及びベッド支持体を有する、管と、
分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)アダプタ組立体を管から切り離す段階と、
c)アダプタ組立体と管との間にアクセス用の間隙を設けるために駆動システムを用いてアダプタ組立体を管の上方に持ち上げる段階と、
d)ガイド要素を管に取り付ける段階と、
e)カラムの内部にアクセスせずに、分配器及び上記バッキングプレートからベッド支持体を外す段階と、
f)カラムの内部にアクセスせずに、上記ガイド要素を用いてベッド支持体をカラムから取り外す段階と、
g)カラム及び/又はベッド支持体及び/又は上記1つ以上のシールに対して保守を行う段階と、
h)カラムの内部にアクセスせずに、ベッド支持体をカラムに戻してベッド支持体及びバッキングプレートを分配器に締結する段階と、
i)管からガイド要素を解放する段階と、
j)管内の作動位置までアダプタ組立体を下降させてアダプタ組立体を管に再連結する段階とを含む。
【0019】
ガイド要素を管に取り付ける段階d)が段階e)の後に実施されてもよく、同様に段階j)が段階i)の前に実施されてもよいことを、当業者であれば認識するであろう。
【0020】
一態様では、段階c)が、アダプタ組立体と管との間にアクセス用の間隙を設けるために、駆動システムを用いて、アダプタ組立体を管の上方に3インチ(76mm)未満の距離持ち上げることを伴う。カラムからベッド支持体を取り外すのを可能にするために又はベッド支持体をカラムに戻すのを可能にするために、アクセス用にアダプタ組立体と管との間に設けられる間隙は高さが3インチ(76mm)未満である。
【0021】
適宜、段階c)は、カラムへのアクセスのための間隙を設けるために、駆動システムを用いて、アダプタ組立体を管の上方に2インチ(50mm)未満の距離持ち上げることを伴う。別の態様では、この間隙は高さが2インチ(50mm)未満である。別の態様では、この間隙は高さが1インチ(25mm)である。間隙の高さが3インチ(76mm)未満に制限されることにより、操作者が、持ち上げられたアダプタ組立体の下方で作業すること及び懸吊されている荷重に対して物理的に露出されることが回避される。
【0022】
別の態様では、ガイド要素はガイドレールである。別の実施形態では、ガイド要素は、取り外し又は挿入のために意図される方向以外の任意の方向にベッド支持体が移動するのを制限するような、バンパ又は垂直方向に設置されるローラ或いは別の技術的手段の形態をとることができる。
【0023】
別の態様では、段階f)及び/又は段階h)は、ガイド要素に沿ってベッド支持体を移動させるために移送手段を使用することをさらに含む。
【0024】
別の態様では、移送手段はローラプレートである。ガイド要素に沿ってベッド支持体が摺動してカラムから出る又はカラムに入るのを促進するための、ローラ又はボールの組立体などの、別の実施形態も可能である。
【0025】
一態様では、段階d)はガイド要素を支持体に取り付けることをさらに含む。支持体は、例えば、ガイド要素がベッド支持体又は分配器の重量を支えること及びベッド支持体又は分配器をカラムから取り外すのを促進するために水平位置及び高さ位置を維持することの両方を行うことを可能にする任意のボディ又は構造であってよい。一実施形態では、支持体はハンドリング装置であってよい。ハンドリング装置は1つ以上のアームを有していてよく、この方法は、ベッド支持体をハンドリング装置の1つ以上のアームの上で支持すること又はベッド支持体をハンドリング装置の1つ以上のアームに着脱自在に取り付けることを含む。
【0026】
固定手段が分配器の外面から解放可能であることに留意されたい。それにより、操作者が間隙の中に入ることが必要なくなることから、操作者が懸吊されている荷重又は支持されている荷重に対して露出されることが減る。
【0027】
内蔵駆動システムは、電気システム、モータ駆動システム、液圧システム又は空気圧システムである。好適な態様では、駆動システムは2つ以上のシリンダを有し、保守時のアクセスために、任意の2つのシリンダの間にベッド支持体の直径より長い距離を有する。これにより、ベッド支持体及び/又は分配器を支持するのに、並びに、ベッド支持体及び/又は分配器をカラムから取り外したりベッド支持体及び/又は分配器をカラムに戻したりするのに、ハンドリング装置を使用することが可能となる。また、この配置構成により、ベッド支持体を実質的に傾斜させることを必要とせずにベッド支持体を取り外したり挿入したりすることが可能となる。これにより、操作者が懸吊されている荷重の下方に露出されることが減り、ベッド支持体を人力作業で取り扱うこと及び/又は機械的に取り扱うことが容易になる。より好適には、各シリンダは独立してカラムから取り外され得る。
【0028】
本発明の第2の態様によると、クロマトグラフィーカラム又はその部品に対して保守を行うための方法が提供され、この方法は、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体及びベース組立体を備える管であって、上記アダプタ組立体が作動モードにおいて上記管のキャビティ内で移動可能であり、
前記ベース組立体が、解放可能な固定手段によって互いに締結される、分配器、バッキングプレート及びベッド支持体を有する、管と、
分配システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)管をベース組立体から解放する段階と、
c)管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために駆動システムを用いて管及びアダプタ組立体をベース組立体の上方に持ち上げる段階と、
d)ガイド要素を管に取り付ける段階と、
e)カラムの内部にアクセスせずに、分配器及び上記バッキングプレートからベッド支持体を外す段階と、
f)カラムの内部にアクセスせずに、上記ガイド要素を用いてベッド支持体をカラムから取り外す段階と、
g)カラム及び/又はベッド支持体及び/又は上記1つ以上のシールに対して保守を行う段階と、
h)カラムの内部にアクセスせずに、ベッド支持体をカラムに戻してベッド支持体をバッキングプレート及び分配器に締結する段階と、
i)管からガイド要素を解放する段階と、
j)管及びアダプタ組立体を作動位置まで下降させて管をベース組立体に再連結する段階とを含む。
【0029】
ガイド要素を管に取り付ける段階d)が段階e)の後に実施されてもよく、同様に段階j)が段階i)の前に実施されてもよいことを、当業者であれば理解するであろう。
【0030】
一態様では、段階c)が、管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために、駆動システムを用いて、管及びアダプタ組立体をベース組立体の上方に3インチ(76mm)未満の距離持ち上げることを伴う。
【0031】
別の態様では、段階c)は、管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために、駆動システムを用いて、管及びアダプタ組立体をベース組立体の上方に2インチ(50mm)未満の距離持ち上げることを伴う。別の態様では、この間隙は高さが1インチ(25mm)である。間隙の高さが3インチ(76mm)未満に制限されることにより、操作者が、持ち上げられたアダプタ組立体の下方で作業すること及び懸吊されている荷重に対して物理的に露出されることが回避される。
【0032】
別の態様では、ガイド要素はガイドレールである。別の実施形態では、ガイド要素は、取り外し又は挿入のために意図される方向以外の任意の方向にベッド支持体が移動するのを制限するような、バンパ又は垂直方向に設置されるローラ或いは別の技術的手段の形態をとることができる。
【0033】
別の態様では、段階f)及び/又は段階h)は、ガイド要素に沿ってベッド支持体を移動させるために移送手段を使用することをさらに含む。移送手段は例えばローラプレートであってよい。ガイド要素に沿ってベッド支持体が摺動してカラムから出る又はカラムに入るのを促進するための、ローラ又はボールの組立体などの、別の実施形態も可能である。
【0034】
別の態様では、段階e)の後、ベッド支持体が、バッキングプレートに取り付けられた持ち上げ手段により分配器の上方に持ち上げられる。一実施形態では、持ち上げ手段は、ベッド支持体と分配器との間に可逆的に挿入されるための、傾斜縁部を備える可動カムプレートを有する。別の実施形態では、持ち上げ手段は、回転可能な半円形カムプレートを有する。
【0035】
一態様では、段階d)はガイド要素を支持体に取り付けることをさらに含む。支持体は、例えば、ガイド要素がベッド支持体又は分配器の重量を支えること及びベッド支持体又は分配器をカラムから取り外すのを促進するために水平位置及び高さ位置を維持することの両方を行うことを可能にする任意のボディ又は構造であってよい。一実施形態では、支持体はハンドリング装置である。ハンドリング装置は1つ以上のアームを有していてよく、この方法は、ベッド支持体をハンドリング装置の1つ以上のアームの上で支持すること又はベッド支持体をハンドリング装置の1つ以上のアームに着脱自在に取り付けることを含む。
【0036】
内蔵駆動システムは、電気システム、モータ駆動システム、液圧システム又は空気圧システムである。好適な態様では、駆動システムは2つ以上のシリンダを有し、保守時のアクセスために、任意の2つのシリンダの間にベッド支持体の直径より長い距離を有する。これにより、ベッド支持体及び/又は分配器を支持するのに、並びに、ベッド支持体及び/又は分配器をカラムから取り外したりベッド支持体及び/又は分配器をカラムに戻したりするのに、ハンドリング装置を使用することが可能となる。また、この配置構成により、ベッド支持体を実質的に傾斜させることを必要とせずにベッド支持体を取り外したり挿入したりすることが可能となる。これにより、操作者が懸吊されている荷重の下方に露出されることが減り、ベッド支持体を人力作業で取り扱うこと及び/又は機械的に取り扱うことが容易になる。より好適には、各シリンダは独立してカラムから取り外され得る。
【0037】
一実施形態では、カラムは、駆動システムのシリンダを定位置で機械的に固定してそれらを動かないようにする係止システムを有し、それにより、駆動システムが機能停止した場合にアダプタが作動することがなくなる。この方法は、駆動システムを用いてアダプタ組立体及び管をベース組立体の上方に3インチ(76mm)未満持ち上げた後で、係止システムを用いてアダプタ組立体及び管をベース組立体の上方で係止する段階をさらに含む。これにより操作者に高い安全性がもたらされる。
【0038】
本発明の第3の態様によると、本発明の第1の態様及び/又は第2の態様の方法を実施するのに適したクロマトグラフィーカラムが提供される。
【0039】
添付図面に関連する以下の説明により本発明の特徴及び利点が明らかとなる。
【図面の簡単な説明】
【0040】
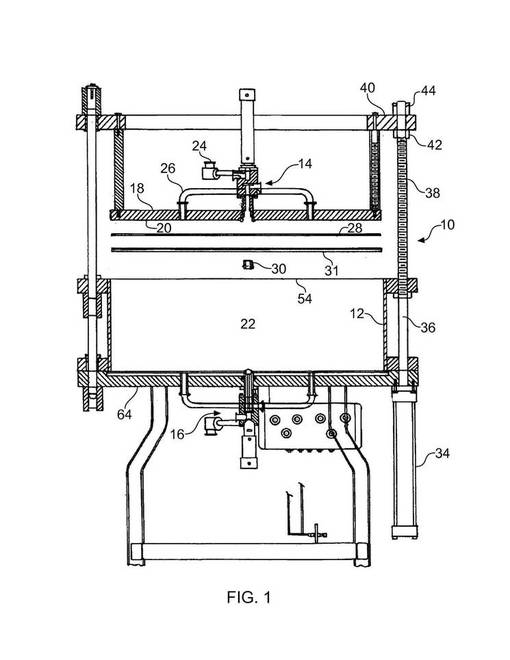
【図1】第1の保守位置にある当技術分野で知られているカラムの一実施形態を示す断面図である。
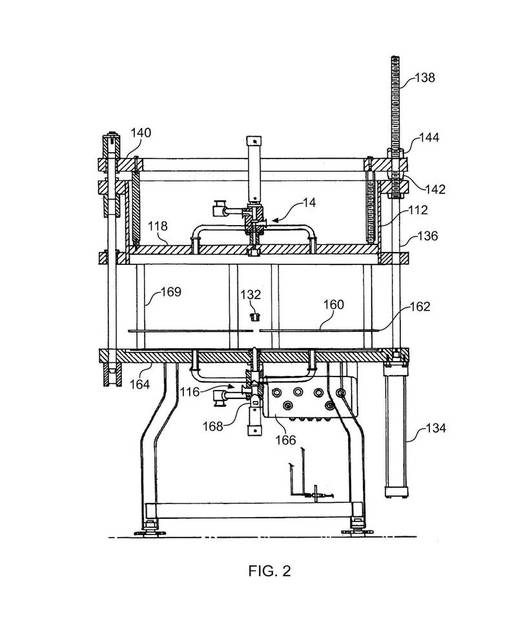
【図2】第2の保守位置にある図1のカラムと同じ実施形態を示す断面図である。
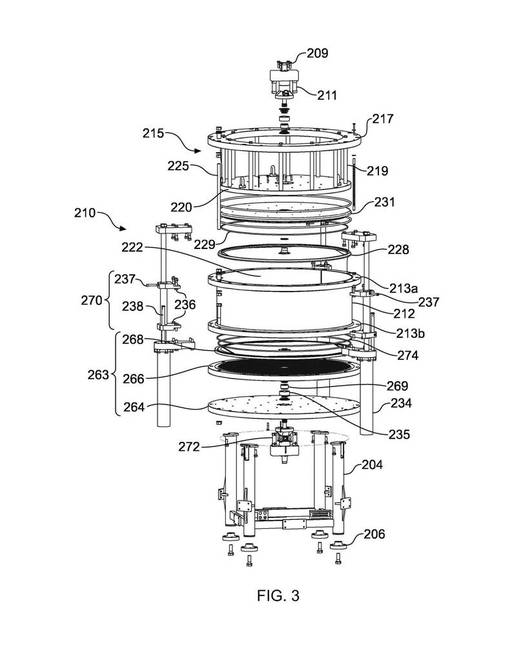
【図3】本発明の一実施形態を示す概略分解正面図である。
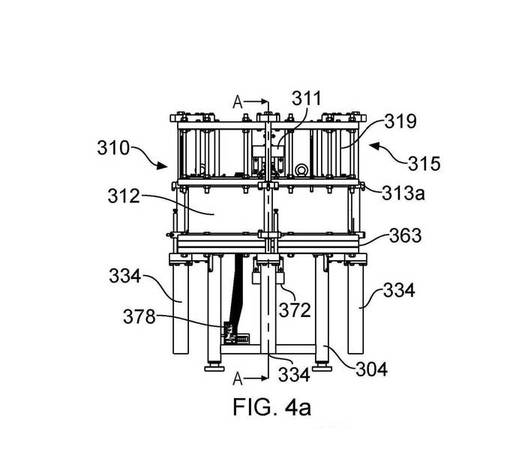
【図4a】本発明によるカラムを示す概略正面図である。
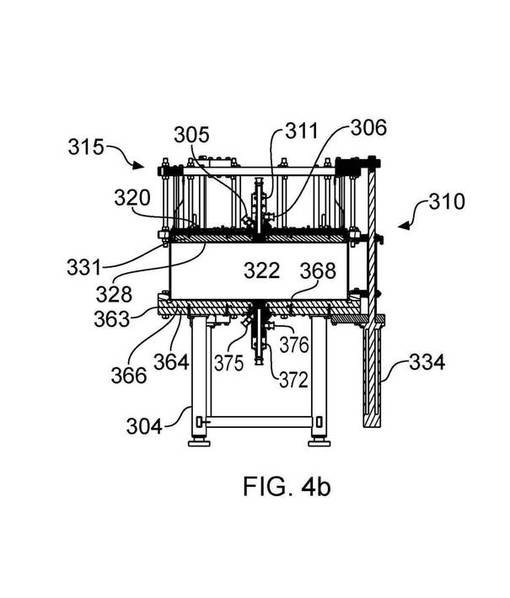
【図4b】図4aのカラムを示す側断面図である。
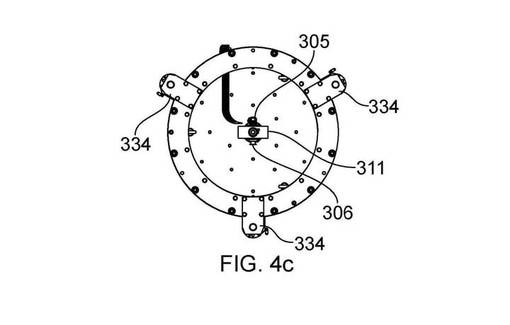
【図4c】図4aのカラムを示す上面図である。
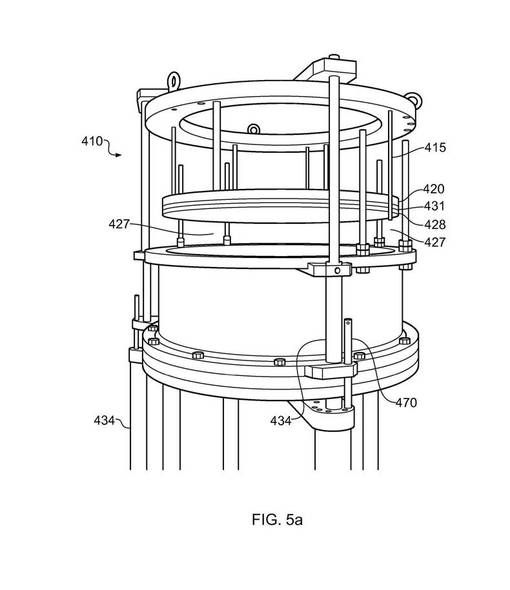
【図5a】アクセスのための間隙を設けるために持ち上げられて定位置で固定されたアダプタ組立体を示す正面斜視図である。
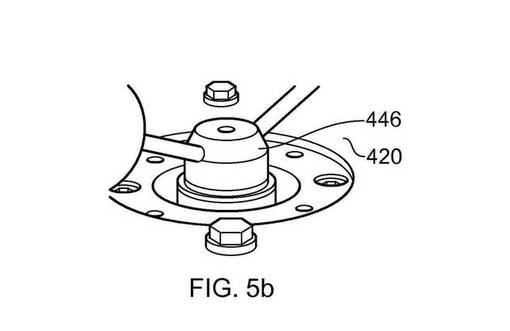
【図5b】分配器及びベッド支持体を固定する締結手段の取り外しを示す図である。
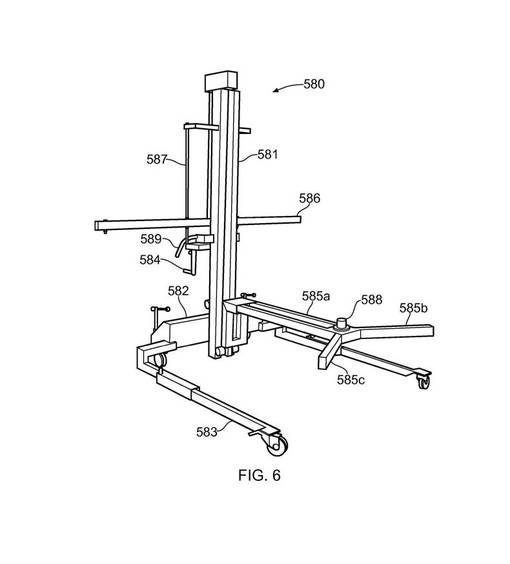
【図6】分配器又はベッド支持体を本発明によるカラムから取り外すのに/分配器又はベッド支持体を本発明によるカラムに挿入するのに使用されるハンドリング装置を示す斜視図である。
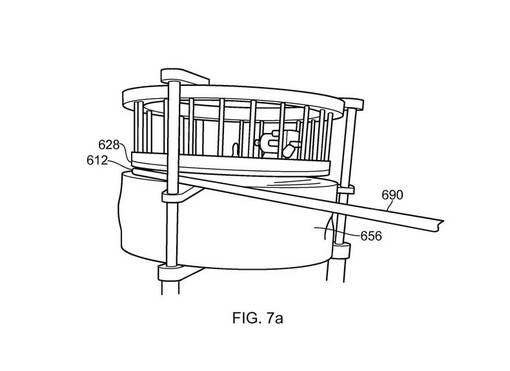
【図7a】カラム管に対するガイド要素又はレールの取り付けを示している、図5のカラムを示す斜視図である。
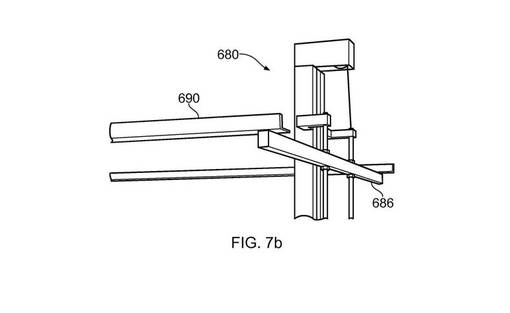
【図7b】ハンドリング装置の交差部材に対するガイド要素又はレールのもう一方の端部の取り付けを示す図である。
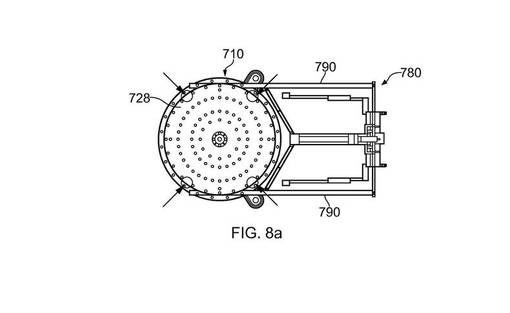
【図8a】ベッド支持体を支持するためにハンドリング装置が定位置にある、レールをカラム管及び交差部材に取り付けた後の図5のカラムを示す概略平面断面図である。
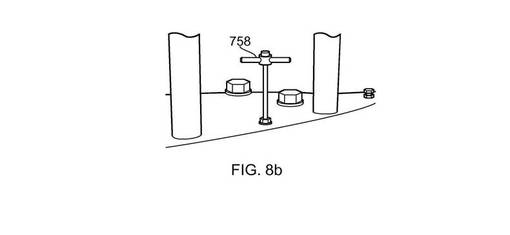
【図8b】アダプタからベッド支持体を下降させるのに使用される定位置にある引上ボルトの1つを示している、カラムを示す斜視図である。
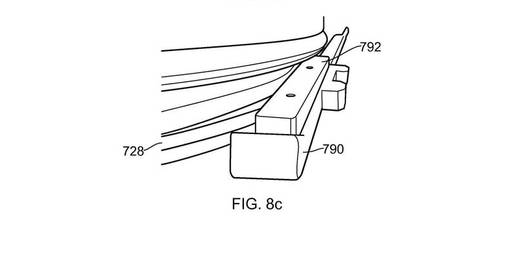
【図8c】アダプタベッド支持体に取り付けられてレール内に配置されているローラプレートを示している、カラムを示す斜視図である。
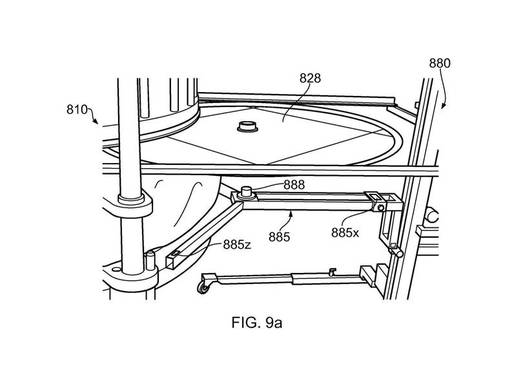
【図9a】アダプタベッド支持体がカラムから部分的に取り外されてハンドリング装置のアームに位置合わせされている、図5のカラムを示す斜視図である。
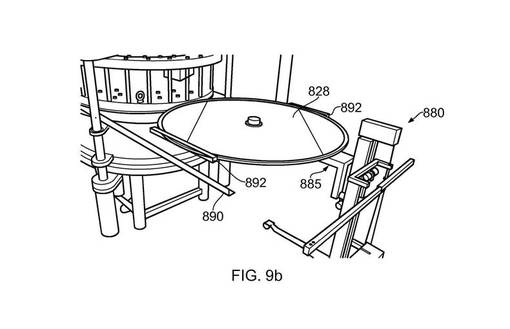
【図9b】ハンドリング装置によりカラムから離されて取り外されているベッド支持体を示す図である。
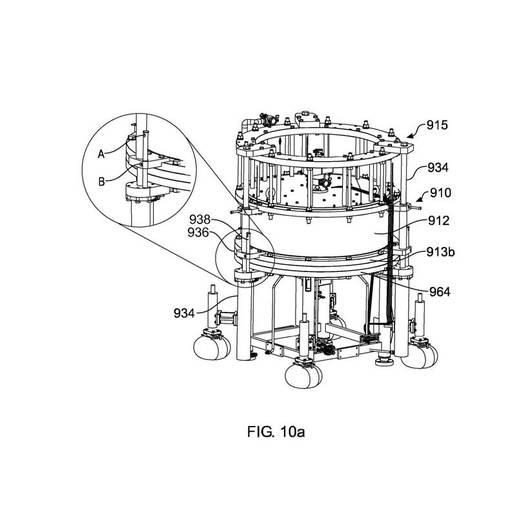
【図10a】本発明による係止システムを示しているインセットを含む、カラムを示す斜視図である。
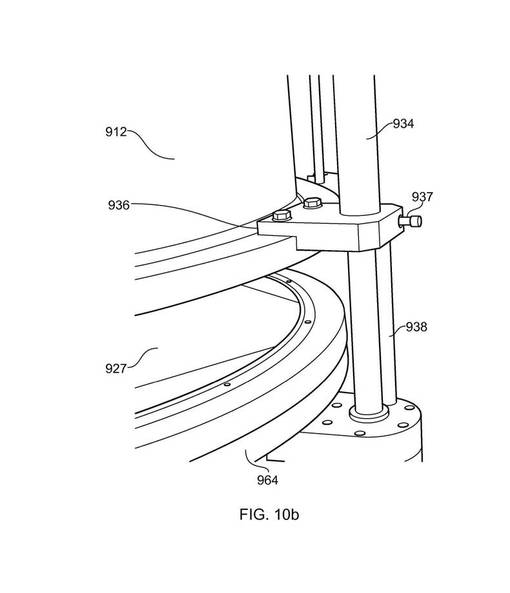
【図10b】ベースの上方に持ち上げられて定位置で係止される過程にあるカラム管を示す図である。
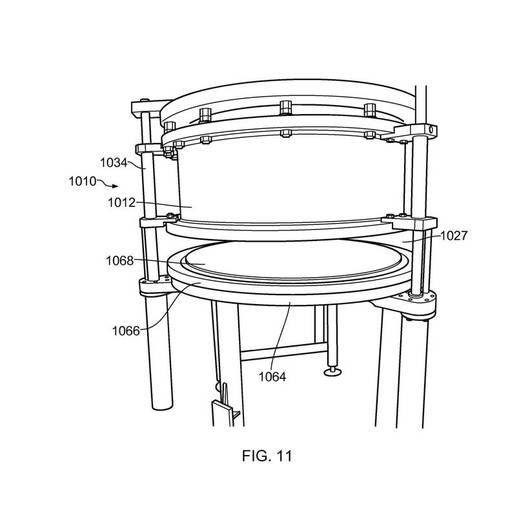
【図11】カラム管が持ち上げられて定位置で係止されており保守を行う準備ができている、カラムを示す斜視図である。
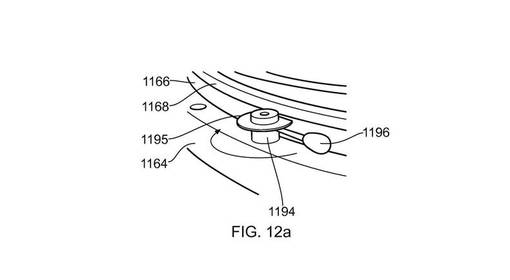
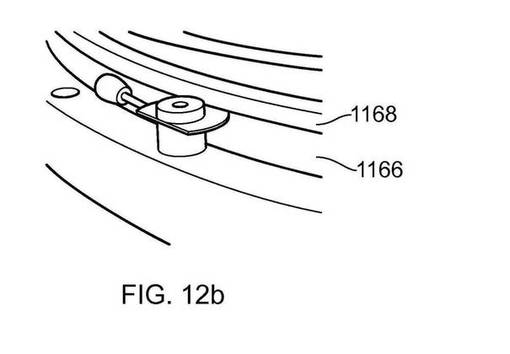
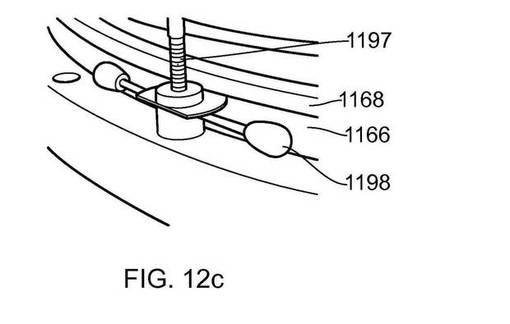
【図12a】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
【図12b】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
【図12c】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
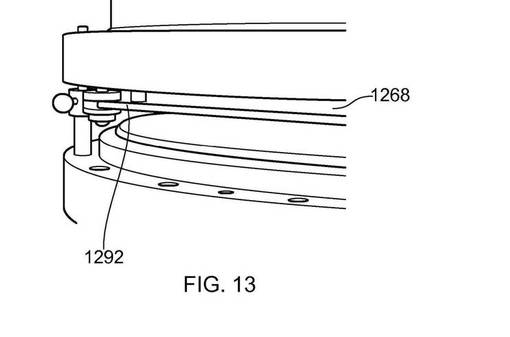
【図13】ベッド支持体に取り付けられたローラプレートを示している、カラムを示す斜視図である。
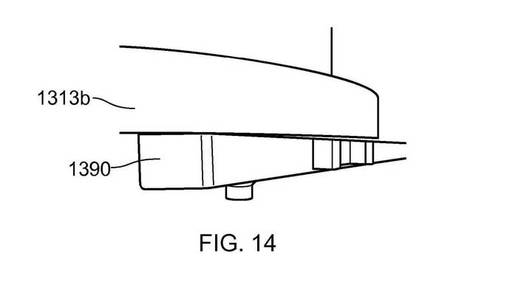
【図14】下部フランジに取り付けられたレールを示している、カラムを示す斜視図である。
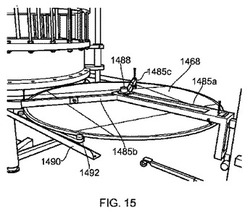
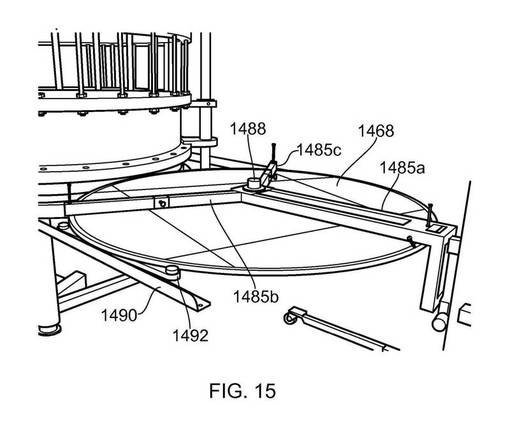
【図15】ハンドリング装置によりカラムから離されて取り外されている下部ベッド支持体を示す斜視図である。
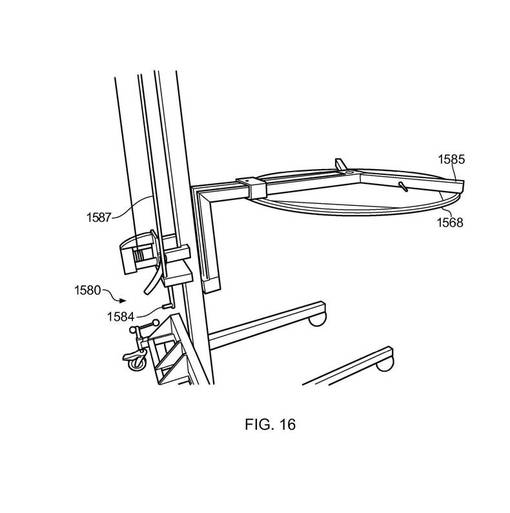
【図16】カラムから取り外されて保守を行う準備ができているベッド支持体を示す図である。
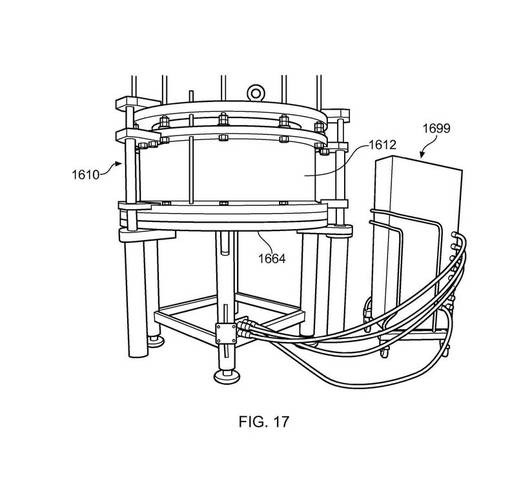
【図17】カラム管が下降されてベースにボルト止めされるのを待つ状態にある、図11のカラムを示す斜視図である。
【発明を実施するための形態】
【0041】
本発明は、クロマトグラフィーカラム内で保守を行うのを可能にするための方法及び装置に関する。図1は、当技術分野で知られており米国特許第6736974号に記載されているカラム10を示しており、このカラム10は、ホイスト又はクレーンを必要とせずにクロマトグラフィーカラム内で保守を行うのを可能にする。カラム10は、上部にある分散システム14及び下部にある収集システム16を有する細長い中空円筒形ハウジング12すなわち管を有する。分散システム14は、下側端部又は内部端部(すなわち、カラムの内部)に形成される上側の円筒形のプランジャヘッド又はアダプタ20を有する円筒形ドラム18を含む。アダプタ20は、図1の第1の作動位置で示されるように、通常、管12の上側部分の中に配置される。アダプタ20は、図1に示される液圧装置などの駆動システム34によって移動され得る。アダプタ20が移動することにより、カラム内に最適な高さの充填された媒体ベッドを作るためにクロマトグラフ媒体を圧縮することが可能となり、分散システム14と収集システム16との間及び/又はアダプタ20とベース64との間にキャビティ22が形成される。
【0042】
分散システム14は、液体入口24に連結される移動層経路、並びに、入ってくる液体をキャビティ22内で収容される媒体ベッドの上部全体にわたって分配するための入口マニホルド26を有することができる。ベッド支持体(又は、入口スクリーン)28或いはフィルタが、コネクタにより、及び/又は、キャビティ22からアクセス可能である内側クランプナット30により、アダプタ20に取り付けられる。ベッド支持体28は、保守を行うために、クランプナット30を解放することによって取り外され得る;分配器プレート31も取り外し可能であってよい(分配器プレートの設計の説明は米国特許第6190560号を参照されたい)。
【0043】
作動モードにおいてアダプタ20を移動させるのに駆動システムが使用される。駆動システムは、1つ以上の、好適には3つ以上の駆動シリンダ34で構成される。駆動シリンダ34は、ドラム18に結合されている駆動ピストン36を移動させる。駆動ピストン36の一部分は、ナット42、44などを用いて駆動ピストン36に対して特定の位置で駆動ピストン36を接続アーム40に連結又は結合するのを可能にするために、ねじ山38をつけることができる。
【0044】
図1はアダプタ20の第1の保守位置を示しており、ここでは、アダプタ20が、駆動システム34及び駆動ピストン36によりシリンダ内でキャビティ22の上部54から所定の距離持ち上げられている。したがって、操作者は、分配器プレート31及びベッド支持体28をアダプタ20に対して保持するためのナット30を解放したり取り付けたりするためにドラム18の中央に手でアクセスすることができる。次いで、分配器プレート31及び/又はベッド支持体28が保守のために取り外され得る。次いで、これらの分配器プレート31及び/又はベッド支持体28がアダプタ20に取り付けられて元の位置に戻され、アダプタ20が運転モードに戻るために下降され得、必要に応じて、ナット42、44が適切な作動構成へとリセットされる。
【0045】
管112と収集システム116との間にその外側縁部162がくるように通常位置決めされる下側ベッド支持体(又はスクリーン)160を取り外すといったような第2の保守作業を実施するために、図2に示されるように管112が駆動システムによって持ち上げられ得る。通常は管112をベース164に固定しているボルトが取り外され、管112をドラム118と共に示されるように上方向に動かすために、ナット142、144がピストン136に結合され得る。このとき、ベッド支持体160をベース164に取り付けているナット132を緩めて保守のためにベッド支持体160を取り外すために操作者がアクセスできるようにするための間隙が形成される。保守が完了すると、操作者により、ベッド支持体160が元の位置に戻されてナット132によりベース164に取り付けられ、逆のプロセスで、管112及びドラム118が作動位置まで下降される。
【0046】
次に、図3〜13を参照して本発明を説明する。図3〜8は、上側アダプタ組立体へのアクセスを実現することに関し、図9〜13は保守のためにベース組立体へのアクセスを実現することに関する。
【0047】
図3は、本発明によるカラムの概略分解正面図である。このカラムは、製薬業界で一般的であるGMP環境で使用されるのに適したステンレス鋼及び別の材料などの、強靭な不活性材料で作られる。カラム210は、カラムの高さ及び/又はレベルを修正するために調整可能である足部206を有する脚部204上で支持される。脚部204は、一方の端部にあるベース組立体263をもう一方の端部にあるアダプタ組立体215から分離する円筒形ハウジング又は管212を有するカラム210を支持する。管212は、通常、ステンレス鋼又は別の強靭な不活性材料から作られてよい。アダプタ組立体215にはノズル211を有する分散システムが隣接しており、ノズル211は、緩衝液又は別の適切な移動相液体或いは分離される化学薬品/材料を導入するための移動相経路と、液体入口209とを含む。管212は、1つ以上のシリンダ234を有する駆動システムによりアダプタ組立体215及びベース組立体263に連結され得る。駆動システムは示されるように液圧システムであってよく、又は、空気圧手段又は電気的手段などの別の適当な手段によって動力を供給されてもよい。アダプタ組立体215は、例えば、カラム内で化学薬品のクロマトグラフ分離を行うのに使用されるクロマトグラフ媒体のベッドを充填又は圧縮するために、作動モードにおいて管212のキャビティ222内で移動可能である。アダプタ組立体215は、アダプタフランジ217と、1つ以上の間隔柱(distance pillar)219と、通常はステンレス鋼で作られるバッキングプレート220と、液体を均一に分配するために多数のチャネルを有するプレートの形態をとることができる分配器231と、スクリーン又はメッシュ又はフィルタを有するベッド支持体228と、任意選択の封止リング(例えば、229)とを有する。ベッド支持体は、不活性プラスチック、又は、ステンレス鋼などの金属材料で作られてよい。分配器231及びベッド支持体228は解放可能な固定手段(図示せず)によって互いに締結される。典型的な解放可能な固定手段には、限定しないが、ねじ、ナット又はクランプが含まれる。固定手段(図示せず)は、分配器231又はバッキングプレート220の外面からのみ、すなわちキャビティ222から最も遠いプレートの面からのみアクセスされて解放され得る。この実施例では、固定手段(図示せず)へのアクセスを可能にするためには、ノズル211が最初に取り外されなければならない。バッキングプレート、分配器及びベッド支持体を一体に締結するために、適宜、バッキングプレートの外面からアクセス可能である追加の解放可能な固定手段が使用され得る。これらの固定手段は、構成要素の周囲部の周りの対応する孔を通して挿入されるボルトの形態をとることができる。バッキングプレート又は分配器の外面からアクセスすることにより、カラム内で懸吊されている又は支持されている荷重に対して操作者が不必要に露出されることが回避される。
【0048】
ベース組立体263は、解放可能な固定手段269によって互いに締結される、分配器266及びベッド支持体268並びに任意選択のバッキングプレート264を有する。ベッド支持体268は、スクリーン又はメッシュ又はフィルタ及び任意選択の封止リング(例えば、274)を有する。ベッド支持体は、不活性プラスチック、又は、ステンレス鋼などの金属材料で作られてよい。解放可能な固定手段269は、例えば、ねじ、ナット、ボルト又はクランプであるが、別の解放可能な固定手段も可能であることが認識されよう。図から分かるように、固定手段269は、各構成要素内の中心孔を通してベッド支持体268及び分配器266を固定する。固定手段269は分配器266の外面からのみアクセス可能であり、したがって、分配器266の外面からのみ解放可能である。図3では、固定手段269を解放するためのアクセスを設けるためには、ノズル272が最初に取り外されなければならない。バッキングプレート、分配器及びベッド支持体を一体に締結するために、適宜、バッキングプレートの外面からアクセス可能である追加の解放可能な固定手段が使用され得る。これらの固定手段は、構成要素の周囲部の周りの対応する孔を通して挿入されるボルトの形態をとることができる。バッキングプレート264の外面からアクセスすることにより、カラムの内部からのみアクセスが可能である場合のように懸吊されている荷重の下方に操作者が露出されることが回避される。
【0049】
管212がクロマトグラフ媒体で満たされている場合、カラム上での化学物質又は生物物質の分離が下向きの流れ又は上向きの流れのいずれかで行われ得ることが理解されよう。したがって、下向きの流れの場合、分離される化学物質又は生物物質を含有する液体は、ノズル211を通して導入され、媒体のベッドを通って下方向に移動し、ノズル272を通って出口ポート(図4bの375)を介して、カラムのベースのところにある収集システム内で収集される。上向きの流れの形態の場合、分離すべき物質を含有する液体は、下部ノズル272を介して導入され、媒体ベッドを通して上方向に流れ、ノズル211を通って出口ポート(図4bの305)を介してカラムの上部で収集される。分かりやすいように、下向きの流れの形態において、カラムの保守又は補修を説明する。
【0050】
アダプタ組立体215又は分配器231に対して保守を行うために、アダプタフランジ217を上側カラムフランジ213aに接合しているナットを外すことによりアダプタ組立体215がカラム管212から切り離される。次いで、駆動システムが、シリンダ234を用いて、3インチ(76mm)未満の距離、通常は2インチ(50mm)未満の距離アダプタ組立体215を持ち上げ、それにより間隙が形成され、この間隙を通して、ベッド支持体268及び/又は分配器266が取り外され得る。アダプタ組立体215が、シリンダブラケット236、シリンダ234及び組立体215内の位置合わせされた孔を通して挿入されるプランジャ237により、係止システム270を使用して定位置で係止される。この固定位置では、固定手段が解放されると、アダプタベッド支持体及び/又は分配器を保守のためにカラムから取り外すことができ、この解放は、上述したように、ノズル211を取り外した後で、カラムの外面〜取り外すことによって行われる。カラム上で保守が行われた後(例えば、ベッド支持体228が交換される)、上記の手順を逆転させることにより、カラム210が再び作動可能となる:アダプタ組立体215が、プランジャ237を取り外すことにより固定位置から解放され、次いで、シリンダ234を使用して下降され、次いで、アダプタフランジ217を上側カラムフランジ213aに接合するためのナットを元の位置に戻すことによりカラム管212に再連結される。
【0051】
下部分配器266又はベース組立体263に対する保守又は補修は、ベース263から管212を解放して、駆動システムの補助により、3インチ(76mm)の距離、通常は2インチ(50mm)の距離管212及びアダプタ組立体215を持ち上げることにより、実施される。下部バッキングプレート264に接合しているカラム管212の下側フランジ213b上のボルトが取り外される。次いで、カラム管212及びアダプタ組立体215が駆動シリンダ234によって持ち上げられる。管212及び上側アダプタ組立体が、係止ピン238及びブラケット236内の位置合わせされた孔を通してプランジャ(図示せず)を挿入することにより、シリンダブラケット236を備えるベースの上方の定位置に係止システム270により固定される。
【0052】
次いで、下部ノズル272がバックプレート264及び分配器266から切り離される。ノズル272が間隔リング235と共に取り外され、それにより、ナットの形態であってよい固定手段269を解放するためにアクセスすることが可能となる。ナット269が、分配器266の外面、すなわちキャビティ222から離れた面から取り外され、ひいては、懸吊されている又は支持されている荷重に対して操作者が露出されなくなる。バッキングプレート、分配器及びベッド支持体を通して挿入されるボルトなどの上述した追加の解放可能な固定手段が存在する場合、これらの追加の解放手段をバッキングプレートの外面から取り外さなければならない。この時点で、ベッド支持体268及び/又はOリングの交換又は洗浄といったような保守及び補修のために、カラムの内部にアクセスできる。カラムを作動モードに戻すためには、上述の手順が逆転される。
【0053】
図4aは、本発明によるカラムの概略正面図である。カラム310は脚部304上で支持され、管312によりアダプタ組立体315から分離されるベース組立体363を有する。これらの構成要素は、製薬業界においてGMPに認可されている、ステンレス鋼などの強靭な不活性材料で作られる。図では、ベース組立体363及びアダプタ組立体は、3つの液圧シリンダ334の形態をとる駆動システムに連結されている。別の実施形態では、カラムを持ち上げたり下降させたりするのに、圧縮空気又は電気により動力を供給されるような別の駆動システムが使用されもよいことが理解されよう。また、3つのシリンダが使用されることは必須ではなく、一部の事例では1つのシリンダで十分である。カラム310は、カラム内に液体を導入するための、上部ノズル311及び下部ノズルを備える。駆動システム/シリンダ334に取り付けられた液圧組立体378も示されている。
【0054】
図4bは、液圧シリンダ334のうちの1つを断面で示している図4aのカラムの側断面図である。クロマトグラフ媒体のベッドを収容するためのキャビティ322を断面で見ることができる。カラム310に液体を導入したりカラム310から液体を除去したりするための、上部ノズル311及び下部ノズル372の液体入口305、375及び出口306、376が示されている。シリンダ334は、ベース組立体(ここでは、バッキングプレート364、分配器366及びベッド支持体368を有して示される)並びにアダプタ組立体315(ここでは、バッキングプレート320、分配器331及びベッド支持体328を有して示される)に連結されている。
【0055】
図4cは図4aのカラムの上面図であり、3つの液圧シリンダ334と、液体入口305及び出口306を備えるノズル311とを示している。
【0056】
保守を行うことを目的としてアダプタ組立体315を持ち上げるために、アダプタ315とカラムフランジ313aとを接合している上側カラムフランジの下のナットが緩められて外される。次いで、駆動システムが、液圧シリンダ334を用いて、3インチ(76mm)未満の距離、通常は2インチ(50mm)未満の距離アダプタ組立体315を持ち上げる。アダプタ組立体315は、組立体を補修位置又は保守位置(図3を参照)で固定するために、シリンダブラケット(図示せず)内の孔、液圧シリンダ334内の孔及びアダプタ組立体315内の孔が位置合わせされてプランジャ(図示せず)により定位置で係止されるまで、持ち上げられる。
【0057】
図5aは、間隙427を設けるために定位置まで持ち上げられて固定されているアダプタ組立体415を示す正面斜視図であり、ベッド支持体428及び/又は分配器431はこの間隙427を通して取り外され得る。この図では例示のために間隙427は明瞭に示されているが、操作者が誤って中に手を入れたり懸吊されている重い荷重に対して自分の腕を露出したりするのを防止するために、間隙427は、3インチ(76mm)未満であり、通常は2インチ(50mm)未満である。カラム410は、3つの液圧シリンダ434を有する駆動システムを有する。この時点では、アダプタベッド支持体428、分配器431及びバッキングプレート420は可視であり、ベッド支持体428は、間隙427にアクセスすることなく固定手段(図示せず)を解放することにより分配器431から外され得る。このプロセスを説明するために図4を参照する。この図4では、ベッド支持体328を分配器331に固定している保持用ナット(図示せず)を間隙427にアクセスせずに取り外すためのアクセスを与えるために、ノズル311が最初に取り外される。固定ナットが分配器331の外面から取り外される。
【0058】
図5bは、スパナ446を使用してアダプタ組立体のバッキングプレート420側から固定手段を解放するところを示している。固定手段(スパナに隠れているが、保持用のナットの形態である)がアダプタベッド支持体を分配器に固定している。
【0059】
ハンドリング装置580の一実施形態が図6に示されている。装置580は、脚部583を有するフレーム582上で支持される中央柱581を備えるトロリー又はカートの形態である。装置580は強靭な不活性材料で作られ、このような材料には、限定しないが、製薬業界で一般的であるGMP環境で使用されるのに適した、ステンレス鋼及び別の材料が含まれる。延長可能アーム585a、b、cが柱581から突出しており、これらの延長可能アーム585a、b、cは、機械的手段又は別の手段により柱581に対して上昇又は下降され得る。示される実施形態では、アーム585a、b、cは、装置を操向又は制御するための手段を与えるハンドル589に隣接する手動のジャッキ機構584により上昇又は下降される。585a、b、cは分配器又はベッド支持体の重量を支承するように設計されており、これらの構成要素の直径まで延長可能である。示される実施形態は3つのアーム585a、b、cを有するが、この装置がそれのみに限定されないこと、及び、別の実施形態が個々の設計に応じて3つより少ない又は多いアーム(例えば、1つ、2つ、4つ、5つ)を有し得ることを理解されたい。特に輸送時に安全のために分配器及び/又はベッド支持体をアームにボルト止め又は固定するために、アーム585a、b、cの末端のところに孔(図示せず)が設けられる。これらの構成要素がアームに接触するときにベッド支持体/分配器が損傷するいかなるリスクも最小にするために、アーム585a、b、cにパッド(図示せず)が装着されてよい。ベッド支持体又は分配器の中央孔を受けるための隆起した中央要素588(通常は円錐形状)が、これらの構成要素を装置580のアーム585a、b、c上で心合わせするための手段を与える。この要素588は、アーム585a、b、cが交差する箇所の上側又は下側のいずれか又は両方に装着され得る。交差部材586が柱581に対して直角に突出しており、引上ボルト587を使用することにより上昇又は下降され得るようになっている。交差部材586は、ベッド支持体を取り外したり挿入したりするのを容易にするために部材586及びカラム管(図示せず)に可逆的に取り付けられ得るガイド要素(図示せず)を支持するのに使用される。
【0060】
作動時、分配器及び/又はベッド支持体は、アーム585a、b、cから懸吊されるか又はアーム上で支持される。枢動ホイールによりハンドリング装置580が容易に移動すること及び容易に操作されることが可能となる。示される実施形態では、装置580を移動させること及びアーム585a、b、cを上昇/延長させることは手動の手段によって行われるが、装置580を駆動させるための及びアーム585を上昇/下降させるための動力システム(例えば、電気システム、空気圧システム又は液圧システム)を組み込む別の実施形態も可能であることが理解されよう。
【0061】
ハンドリング装置の別の実施形態も可能であり、例えばそれらの実施形態では、アーム585a、b、cの端部にある孔(図示せず)が、アーム585b、cがベッド支持体又は分配器の外側リムに接触するときに、ベッド支持体又は分配器の側面にある対応する孔に位置合わせされるように構成され、それにより、ねじを位置合わせされた孔にねじ込むことによりベッド支持体又は分配器をアームに容易に取り付けることが可能となる。
【0062】
図7aは、カラム管612の上側フランジに取り付けられるレールの形態のガイド要素690を示しており、カラム管は保護プラスチック656で覆われている。レール690がベッド支持体628のすぐ下に配置されており、したがって、任意の固定手段(例えば、ねじ)を取り外した後で、ベッド支持体がレール690の上方の位置まで緩やかに下降され得る。
【0063】
ハンドリング装置680の交差部材686の高さは、突出するガイド要素又はレール690の高さに一致するように調整され、それにより、レール690及び交差部材686が互いに固定される(図7b)。
【0064】
図8aは、ベッド支持体728を受けるように位置決めされたハンドリング装置780を示す、カラム710の断面の概略平面図であり、ベッド支持体をアダプタに固定している、取り外される第1の4つのねじの位置が矢印で示されている。これらの4つのねじは取り外されて、残りの保持用ねじを取り外す際にベッド支持体を下降又は上昇させるのに使用される4つの引上ボルト(図示せず)に交換される。すべての保持用ねじが取り外された後、ベッド支持体728が引上ボルト758(図8b)により直角方向に緩やかに下降され、最終的にベッド支持体728はレール790の表面の上方の約10mmのところにくる。Oリングがベッド支持体の外側リムから持ち上げられて分配器の下に押し込まれ、それにより、挿入される移送手段(図示せず)に接触することが回避される。移送手段792(すなわち、示される実施形態ではローラプレート)がベッド支持体728に取り付けられ、ベッド支持体728が緩やかに下降され、最終的に、ローラプレート792がレール790上に堅固に載置される(図8c)。ベッド支持体728をローラプレート792に取り付けることなく、ベッド支持体728が、レール790上に載置されている移送手段すなわちローラプレート792上まで単純に下降され得るような、別の実施形態も可能であることが理解されよう。
【0065】
ベッド支持体828は十分な距離カラムから外れるように転動され、それにより、ベッド支持体が、ハンドリング装置880のアーム885の上の中央要素886及び支持体パッド885x、z(1つはカラムの後ろに隠れている)に位置合わせされるようにすることができる(図9a)。図9bに示されるように、次いで、ハンドリング装置880がベッド支持体828の全重量を支持するまで、装置880のアーム885が持ち上げられる。レール890がハンドリング装置880から切り離され、ベッド支持体がカラムから離れるように直角方向にゆっくり移動される。この時点で、ローラプレート892が切り離され得、保守が実施される領域までベッド支持体828が移動され得るようなる。
【0066】
作動モードに戻す場合、上述の手順が単純に逆転される。ベッド支持体及び/又は分配器がカラムに戻され、互いに固定されてバッキングプレートに取り付けられ、ノズルが再び取り付けられ、アダプタ組立体が下降されてカラム管にボルト止めされる。
【0067】
次に、図10から17を参照して、下部ベッド支持体及びカラムの内部へのアクセスについて説明する。下部ベッド支持体へのアクセスを可能にするために、下部ノズルが取り外され、次いで、管をベースに接合しているボルトを外すことにより管がベース組立体から解放され、それにより、管及び上側アダプタ組立体が液圧シリンダを用いて持ち上げられ得る。
【0068】
図10aは、図3から図5及び図7から図9において上で説明されたカラム910を示している。バックプレートのバッキングプレート964に取り付けているボルトを外すことにより、下部ノズル(図3の272を参照)が取り外される;ここでは、これらのボルトは、図5b示されるスパナと同様のスパナを使用してベース組立体のバッキングプレート側から取り外される。管912を下部バッキングプレート964に締結している、カラム管の下側フランジ913b上のボルトが緩められて外される。カラム管912及びアダプタ組立体915が、駆動システムの液圧シリンダ934により、ベース組立体の上方に3インチ(76mm)未満だけ持ち上げられて、係止システム(上記の図3で既に説明した係止システム270の一部を示す図10aのインセットを参照)により定位置で固定される。プランジャ937が、係止ピン938内の及びブラケット936内の位置合わせされた孔に導入され、それにより、管及びアダプタ組立体が定位置で固定される(図10b)。管912を下部バッキングプレート964に固定しているボルトを取り外した後、管及びアダプタ組立体を持ち上げることによって形成される間隙927内においてカラムに対して保守を実施することができる。操作者がアクセスするのを制限するために、この間隙は3インチ(7.62cm)未満、通常は2インチ(5.08cm)未満である。
【0069】
図11は、管1012が持ち上げられてシリンダ934に機械的に係止されており、保守を行う準備ができている状態の、カラム1010を示している。ベッド支持体1068を分配器1066に締結している保持用ナット(又は、固定手段)がカラム1010のバッキングプレート1064側から解放される。ベッド支持体を分配器及びバッキングプレートに締結しているボルト(図示せず)などの追加の固定手段が存在し、バッキングプレートの周囲部上に配置されている場合、これらの追加の固定手段がカラムのバッキングプレート面から解放される。
【0070】
下部ベッド支持体1068を移送手段/ローラプレート(図示せず)に装着できるようにするには、したがってカラム1010から取り外せるようにするには、下部ベッド支持体1068を上方に持ち上げて分配器1066から離さなければならない。これは、図12a、12b及び12cに示される持ち上げ手段1194を使用することにより達成される。一実施形態では、持ち上げ手段は持ち上げプレートであり、好適には、バッキングプレート1164のリムの周りに等距離で配置される4つの持ち上げプレート1194である。各持ち上げ手段1194は、傾斜縁部を有する半円形カム1195を含む。カム1195が図12aに示されるように配置されてレバー1196により図12bに示されるように回転されると、カム1195がベッド支持体1168と分配器1166との間に挿入される。引上ボルト1197(図12cに示される)を回転することにより、4つのすべてのカム1195上で支持されるベッド支持体1168が、移送手段又はローラプレート1292をベッド支持体1268の外側リング(図13)の下側に装着してさらにレール1390(図示せず)を管の下部フランジ1313b(図14)の下側に装着するのに十分な距離で、上方に持ち上げられる。次いで、レール1390の反対側の端部がハンドリング装置(図示せず)の交差部材に取り付けられ得る。
【0071】
ベッド支持体が、ベッド支持体に装着されているローラプレートと共に、4つのすべての持ち上げプレート上にある引上ボルトを使用してレールに対して直交方向に下降される。引上ボルト及び持ち上げプレートが取り外され(4つとも取り外され得るが、2つのみを取り外すことで十分である)、ベッド支持体1468がレール1490に沿って外に転動され、最終的に、ねじ切りされた中央スリーブがハンドリング装置の中央要素1488に位置合わせされ、リムのねじ切りされた孔がハンドリング装置のアーム1485a、b、c(図15)上の対応する孔に位置合わせされる。ベッド支持体1468が、ねじボルト又はねじによりアーム1485a、b、cに取り付けられ、次いで、ハンドリング装置によりレール1490のレベルの上方まで持ち上げられる。レール1490がハンドリング装置及びローラプレート1492から取り外されると、ベッド支持体1468が保守を行うための位置まで移動され得る。
【0072】
次いで、必要に応じて、ベッド支持体が洗浄され得るか又はOリングが交換され得る。洗浄及び補修を容易にするために、概略的には、ベッド支持体1568は、図16に示されるようにカラムから離れるように移動され、ある表面(トロリー又はワークベンチなど)上まで下降され、ハンドリング装置1580のアーム1585から解放される。分配器(図11の1066)も、持ち上げ装置を使用して同様の手法で取り外されて補修され得る。
【0073】
保守及び補修が完了した後、上述したプロセスを単に逆転させることにより、カラムは作動モードに戻される。これには、ベッド支持体及び/又は分配器をカラム内に戻すこと、これらの構成要素をバッキングプレートに取り付けること、管及びアダプタ組立体を下降させること、並びにノズルを再取り付けすることが含まれる。図17が、液圧制御ユニット1699に連結された図11のカラム1610を示しており、管1612が下降されており、バッキングプレート1664にボルト止めされる準備ができている。
【0074】
本発明の好適な例示の実施形態を説明したが、単に例示ために提示され、限定するためのものではない、説明した実施形態以外の実施形態によっても本発明が実施され得ることを、当業者であれば認識するであろう。本発明は以下の特許請求の範囲のみによって限定される。
【技術分野】
【0001】
本発明は、クロマトグラフィーカラム、及び工業規模のクロマトグラフィーにおいてカラムを操作するための方法に関する。詳細には、本発明は、クロマトグラフィーカラムと、これらのカラムに対して保守及び点検を行うために、カラムを分解するためのホイスト又はクレーンなどの揚重装置を必要とすることなく、ベッド支持体及び/又は分配器などのカラム構成要素を取り外したり交換したりする安全な方法とに関する。
【背景技術】
【0002】
クロマトグラフィーカラムは、工業プロセスにおいて処理液を精製して処理液から対象の物質を分離するのに使用され得、一般的な例には、ファインケミカル及び薬剤さらには生物学的生成物の大規模な予備精製が含まれる。
【0003】
工業規模のクロマトグラフィーカラムは、通常、上側端部に液体入口を含む軸方向垂直の中空の管状ハウジングであって、緩衝液及び分離すべき物質がこのハウジングを介してその管のキャビティ内に位置する媒体ベッドに分注される、管状ハウジングと、物質及び緩衝液を収集するための、下側端部にある液体収集システムとを有する。緩衝液流体並びに/又は分離及び精製される物質が濾過されるときに通る粒子状のクロマトグラフ媒体又はベッドが、液体入口と収集システムとの間に配置される。
【0004】
通常、アダプタ組立体が管状ハウジングの上側端部に取り付けられ、ベース組立体が下側端部に取り付けられ、ここではベース組立体は下部フランジにボルト止めされる。これらの組立体のそれぞれは、通常、強固なバッキングプレートと、ベッド支持体をさらに支持する分配器とを有する。ベッド支持体は、メッシュ、フィルタ、焼結品、スクリーン、又は、別の流体浸透性の媒体保持用材料の層であり、これは、粒子状媒体のベッドを保持しながら、処理液がクロマトグラフィーベッド空間又はキャビティに流入したりそこから流出したりするのを可能にする。ベッドの高さ及びベッドの圧縮量を調整可能にして制御できるようにするために、アダプタ組立体は、通常、カラム管内部でピストン又は摺動アダプタの形態となるように作られる。通常ノズルを介してカラムがベッド媒体に装入された後、アダプタが管の下部に向かって押し込まれ得、それにより媒体ベッドが圧縮又は加圧される。一般に、ベース組立体は、カラム管の下部フランジに対してボルト止めされるような固定構造であるが、一部の例では、移動可能な摺動可能ピストン又はアダプタの形態であってもよい。
【0005】
ベース組立体のバッキングプレートは、概して、カラムのための支持体として機能し、それ自体は脚部の上で支持されるか、又は、ベース組立体の下方に突出する出口配管のためのクリアランスを作ることができる何らかの別のスタンド構成の上で支持される。
【0006】
このようなカラムが、弁、シール、ベッド支持体、分配システムなどの内部構成要素を保守、洗浄又は点検することを必要とする場合、上側端部/アダプタ組立体をカラム管から離して持ち上げさらにはカラム管を下側端部/ベース組立体から離して持ち上げるためには、これらの組立体が3トンを越える重量を有する場合もあることから、クレーン又はホイストなどの揚重機が必要となる。内部の保守及び点検を実施する際に、カラムを分解するためにオーバーヘッド揚重機を使用することは望ましくない。重い装置が頭上に持ち上げられ、技術者が下方に露出される場合、操作者の安全が明らかに問題となる。また、精密な構成要素が損傷するのを回避するために、互いに分離されているときにカラム及びそのベース組立体/アダプタ組立体を軸方向に位置合わせした状態で維持するのに、位置合わせ構造物が必要となる。
【0007】
このような位置合わせ構造物及び持ち上げ構造物が存在することは、管の周りにおいて非常に邪魔であり、また、内部構成要素を挿入したり/取り外したりするために周囲のある箇所において十分なクリアランスが得られるように慎重にレイアウトを行うことの必要性を生じさせる。また、揚重装置を使用することの必要性により、カラムなどのハウジングは制約を受けることにより、ホイスト又はクレーンを受け入れるために十分な頭上空間及び支持が必要となる。現在、微生物汚染を回避するために、多くのクロマトグラフィーカラムが、GMPの下で、頭上装置を受け入れることが非常に困難であるような「クリーンな」環境で稼動されていることから、分解及び保守のためのカラムを別の部屋に移動させることが必要であることは問題である。カラムを使用するためにクリーンな環境内へと戻す前にカラムを洗浄及び検査することが必要であることにより、この問題がより悪化する。したがって、生物薬剤を製造するのに使用されるGMP施設内にホイスト又はクレーンが存在することは、上記の理由より、さらには、これらの機械がそれらの作動中及び保守中に塵の形態の粒子状物質を放出するという事実より、非常に望ましくない。
【0008】
米国特許第6736974号では、カラムに一体化された液圧システムを用いてアダプタ組立体をカラム管の上方に持ち上げることができる及び/又はカラム管をベース組立体の上方に上昇させることができるカラムを提供することにより、上記の問題の一部に対処している。
【0009】
しかし、米国特許第6736974号に記載されているシステムには、その設計のために重大な欠点がある。米国特許第6736974号の図4及び5から分かるように、また、その文献の第4欄、63〜66行目に記載されているように、分配器プレート(31)及び/又はメッシュ(28/60)がカラムの内部から取り外す際、操作者は、これらの構成要素部品を固定している固定用ナット(30)にアクセスしてそれを取り外すために、ドラム(18)の中央領域内で作業しなければならない。工業用カラムが約200mm〜2000mmに及ぶような、通常は600mm〜1400mmの範囲内にある直径を有し得ることから、上記のことは、作業者が、ナットを外すために、懸吊されている又は支持されている荷重の下方で作業しなければならないことを意味する。このことは、特に、操作者の腕又は頭部が懸吊されている又は支持されている荷重の下方に露出されている場合に、操作者に安全性に関する著しいリスクをもたらす。
【0010】
さらに、カラム管/シリンダ又はアダプタ組立体をそれぞれベース組立体又は管から持ち上げた後で、重いベッド支持体及び/又は分配器をカラムから取り外すことは、液圧駆動ピストン又は安全棒を迂回することを目的としてベッド支持体又は分配器を傾斜させることでしか行われ得ない。これは例えば米国特許第6736974号の図3、4及び5から明確に分かるが、ここでは、任意の2つの安全棒(69)の間の距離又は任意の2つの液圧ピストン(36)の間の距離がメッシュ(28/60)又は分配器プレート(31)の直径より短くなっている。ベース又はアダプタベッド支持体(図示せず)にも同じ問題がある。重量が100kgを超える可能性があるこれらの内部構成要素を取り外すには、操作者による多くの人力作業が必要となり、懸吊されているカラム又はアダプタ組立体の下方に操作者が余儀なく露出される。このことでも、操作者に安全性に関する著しいリスクがもたらされる。
【0011】
米国特許第6736974号に記載されるような、重いベッド支持体又は分配器を物理的に取り外す作業は操作者によって実施されなければならず、この作業を支援するためのいかなる持ち上げ補助装置の使用も開示されていない。液圧ピストン及び安全棒の構成、並びに、ベッド支持体及び/又は分配器をカラムから回収する際に支持構造物に衝突するのを回避するためにベッド支持体及び/又は分配器を傾斜させる必要性のために、特別製の持ち上げ装置の設計が必要となるであろう。
【0012】
さらに、米国特許第6736974号に記載される方法は、カラムの保守を実施するために、カラム管/シリンダ又はアダプタ組立体をそれぞれベース組立体又は管から、3インチ(7.62cm)を超える所定の距離持ち上げることを必要とし、6インチ(15.2cm)を超える距離が具体的に示されており、最も好適には12インチ(30.5cm)を超える距離が具体的に示されている。
【0013】
また、WO2005/056156(Euroflow(UK)Limited)も、クレーン又はホイストを必要とせずに、保守を行うためにアクセスされ得るカラムを開示している。このカラムは、管及びベース組立体が液圧駆動シリンダによって分離されてそれによりそれらの間にアクセス空間が形成されてそれによりベース組立体上で保守又は補修を行うことが可能となるように、設計されている。アダプタ組立体のピストンは、保守を行うために、カラム管の開放端部のところすなわち管とベース組立体との間の空間内で露出されるように、カラム管を通して前進され得る。
【0014】
しかし、この文献から明らかなように(例えば、図19及び図20、並びに、23ページの関連する記述)、ベッド支持体又はメッシュを定位置で保持する締結用ねじを開放するためのアクセスは、管とベース組立体との間の空間によって可能となる。ベッド支持体を取り外すには、保持用ねじを取り外す間において操作者が懸吊されている荷重に露出されることが必要となる。さらに、保守時のアクセスための任意の2つの駆動シリンダの間の距離がベッド支持体の直径より短いため(例えば、図7を参照)、ベッド支持体を取り外すか又は交換する際、操作者が人力作業でベッド支持体を取り扱うこと及びベッド支持体を傾斜させることが必要となる。したがって、カラムを保守する際に、操作者に安全性に関する著しいリスクがもたらされる。
【0015】
参照によりその内容が組み込まれる、本出願人の同時係属中の米国特許出願11/763477号(米国公開番号2008−0308498)及びPCT/SE2009/000011(国際公開番号WO2009/093952)が、分解を行うためにクレーン又はホイストを必要としないクロマトグラフィーカラム及び保守方法を記載している。これらの特許出願に記載される保守方法は、操作者がカラム内において懸吊されている荷重又は支持されている荷重の下方で作業することの必要性を軽減することにより、操作者の安全を改善することを可能にしている。しかし、これらの文献に記載されている方法によりベッド支持体を取り外したり挿入したりすることは、取り外しプロセス又は設置プロセスにおいて別のカラム構成要素に接触して損傷するのを回避するために、操作者によるかなりの技量及び/又は体力を必要とする。持ち上げ装置を使用することを必要とする場合があるこれらのプロセスは、製造機器一式(production suite)内のフロアが平坦ではなかったり傾斜していたりすることにより妨害される可能性がある。さらに、管及びベース、又は、アダプタ組立体及び管は、取り外し又は設置を行うために持ち上げ装置のアームがアクセスするのを可能にするために十分な距離離されて持ち上げられなければならず、これはシリンダのストローク長さ及びコストの両方が影響に与える。したがって、操作者にとって使用することがより安全でより容易であるような、また、懸吊されている荷重又は支持されている荷重に対して操作者を露出させることがなくしたがって操作者のエラーのリスク及び負傷のリスクを軽減するような、代替の高コスト効率の保守及び/又は点検方法を提供することが依然として必要である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】国際公開第2009/093952(A1)号
【発明の概要】
【発明が解決しようとする課題】
【0017】
本発明はこれらの必要性及び他の必要性を認識してそれらに対処する。
【課題を解決するための手段】
【0018】
本発明の第1の態様では、クロマトグラフィーカラム又はその部品に対して保守を行うための方法が提供され、この方法は、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体を備える管であって、上記アダプタ組立体が作動モードにおいて上記管のキャビティ内で移動可能であり、
アダプタ組立体が、解放可能な固定手段によって互いに締結される、バッキングプレート、分配器及びベッド支持体を有する、管と、
分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)アダプタ組立体を管から切り離す段階と、
c)アダプタ組立体と管との間にアクセス用の間隙を設けるために駆動システムを用いてアダプタ組立体を管の上方に持ち上げる段階と、
d)ガイド要素を管に取り付ける段階と、
e)カラムの内部にアクセスせずに、分配器及び上記バッキングプレートからベッド支持体を外す段階と、
f)カラムの内部にアクセスせずに、上記ガイド要素を用いてベッド支持体をカラムから取り外す段階と、
g)カラム及び/又はベッド支持体及び/又は上記1つ以上のシールに対して保守を行う段階と、
h)カラムの内部にアクセスせずに、ベッド支持体をカラムに戻してベッド支持体及びバッキングプレートを分配器に締結する段階と、
i)管からガイド要素を解放する段階と、
j)管内の作動位置までアダプタ組立体を下降させてアダプタ組立体を管に再連結する段階とを含む。
【0019】
ガイド要素を管に取り付ける段階d)が段階e)の後に実施されてもよく、同様に段階j)が段階i)の前に実施されてもよいことを、当業者であれば認識するであろう。
【0020】
一態様では、段階c)が、アダプタ組立体と管との間にアクセス用の間隙を設けるために、駆動システムを用いて、アダプタ組立体を管の上方に3インチ(76mm)未満の距離持ち上げることを伴う。カラムからベッド支持体を取り外すのを可能にするために又はベッド支持体をカラムに戻すのを可能にするために、アクセス用にアダプタ組立体と管との間に設けられる間隙は高さが3インチ(76mm)未満である。
【0021】
適宜、段階c)は、カラムへのアクセスのための間隙を設けるために、駆動システムを用いて、アダプタ組立体を管の上方に2インチ(50mm)未満の距離持ち上げることを伴う。別の態様では、この間隙は高さが2インチ(50mm)未満である。別の態様では、この間隙は高さが1インチ(25mm)である。間隙の高さが3インチ(76mm)未満に制限されることにより、操作者が、持ち上げられたアダプタ組立体の下方で作業すること及び懸吊されている荷重に対して物理的に露出されることが回避される。
【0022】
別の態様では、ガイド要素はガイドレールである。別の実施形態では、ガイド要素は、取り外し又は挿入のために意図される方向以外の任意の方向にベッド支持体が移動するのを制限するような、バンパ又は垂直方向に設置されるローラ或いは別の技術的手段の形態をとることができる。
【0023】
別の態様では、段階f)及び/又は段階h)は、ガイド要素に沿ってベッド支持体を移動させるために移送手段を使用することをさらに含む。
【0024】
別の態様では、移送手段はローラプレートである。ガイド要素に沿ってベッド支持体が摺動してカラムから出る又はカラムに入るのを促進するための、ローラ又はボールの組立体などの、別の実施形態も可能である。
【0025】
一態様では、段階d)はガイド要素を支持体に取り付けることをさらに含む。支持体は、例えば、ガイド要素がベッド支持体又は分配器の重量を支えること及びベッド支持体又は分配器をカラムから取り外すのを促進するために水平位置及び高さ位置を維持することの両方を行うことを可能にする任意のボディ又は構造であってよい。一実施形態では、支持体はハンドリング装置であってよい。ハンドリング装置は1つ以上のアームを有していてよく、この方法は、ベッド支持体をハンドリング装置の1つ以上のアームの上で支持すること又はベッド支持体をハンドリング装置の1つ以上のアームに着脱自在に取り付けることを含む。
【0026】
固定手段が分配器の外面から解放可能であることに留意されたい。それにより、操作者が間隙の中に入ることが必要なくなることから、操作者が懸吊されている荷重又は支持されている荷重に対して露出されることが減る。
【0027】
内蔵駆動システムは、電気システム、モータ駆動システム、液圧システム又は空気圧システムである。好適な態様では、駆動システムは2つ以上のシリンダを有し、保守時のアクセスために、任意の2つのシリンダの間にベッド支持体の直径より長い距離を有する。これにより、ベッド支持体及び/又は分配器を支持するのに、並びに、ベッド支持体及び/又は分配器をカラムから取り外したりベッド支持体及び/又は分配器をカラムに戻したりするのに、ハンドリング装置を使用することが可能となる。また、この配置構成により、ベッド支持体を実質的に傾斜させることを必要とせずにベッド支持体を取り外したり挿入したりすることが可能となる。これにより、操作者が懸吊されている荷重の下方に露出されることが減り、ベッド支持体を人力作業で取り扱うこと及び/又は機械的に取り扱うことが容易になる。より好適には、各シリンダは独立してカラムから取り外され得る。
【0028】
本発明の第2の態様によると、クロマトグラフィーカラム又はその部品に対して保守を行うための方法が提供され、この方法は、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体及びベース組立体を備える管であって、上記アダプタ組立体が作動モードにおいて上記管のキャビティ内で移動可能であり、
前記ベース組立体が、解放可能な固定手段によって互いに締結される、分配器、バッキングプレート及びベッド支持体を有する、管と、
分配システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)管をベース組立体から解放する段階と、
c)管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために駆動システムを用いて管及びアダプタ組立体をベース組立体の上方に持ち上げる段階と、
d)ガイド要素を管に取り付ける段階と、
e)カラムの内部にアクセスせずに、分配器及び上記バッキングプレートからベッド支持体を外す段階と、
f)カラムの内部にアクセスせずに、上記ガイド要素を用いてベッド支持体をカラムから取り外す段階と、
g)カラム及び/又はベッド支持体及び/又は上記1つ以上のシールに対して保守を行う段階と、
h)カラムの内部にアクセスせずに、ベッド支持体をカラムに戻してベッド支持体をバッキングプレート及び分配器に締結する段階と、
i)管からガイド要素を解放する段階と、
j)管及びアダプタ組立体を作動位置まで下降させて管をベース組立体に再連結する段階とを含む。
【0029】
ガイド要素を管に取り付ける段階d)が段階e)の後に実施されてもよく、同様に段階j)が段階i)の前に実施されてもよいことを、当業者であれば理解するであろう。
【0030】
一態様では、段階c)が、管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために、駆動システムを用いて、管及びアダプタ組立体をベース組立体の上方に3インチ(76mm)未満の距離持ち上げることを伴う。
【0031】
別の態様では、段階c)は、管及びアダプタ組立体とベース組立体との間にアクセス用の間隙を設けるために、駆動システムを用いて、管及びアダプタ組立体をベース組立体の上方に2インチ(50mm)未満の距離持ち上げることを伴う。別の態様では、この間隙は高さが1インチ(25mm)である。間隙の高さが3インチ(76mm)未満に制限されることにより、操作者が、持ち上げられたアダプタ組立体の下方で作業すること及び懸吊されている荷重に対して物理的に露出されることが回避される。
【0032】
別の態様では、ガイド要素はガイドレールである。別の実施形態では、ガイド要素は、取り外し又は挿入のために意図される方向以外の任意の方向にベッド支持体が移動するのを制限するような、バンパ又は垂直方向に設置されるローラ或いは別の技術的手段の形態をとることができる。
【0033】
別の態様では、段階f)及び/又は段階h)は、ガイド要素に沿ってベッド支持体を移動させるために移送手段を使用することをさらに含む。移送手段は例えばローラプレートであってよい。ガイド要素に沿ってベッド支持体が摺動してカラムから出る又はカラムに入るのを促進するための、ローラ又はボールの組立体などの、別の実施形態も可能である。
【0034】
別の態様では、段階e)の後、ベッド支持体が、バッキングプレートに取り付けられた持ち上げ手段により分配器の上方に持ち上げられる。一実施形態では、持ち上げ手段は、ベッド支持体と分配器との間に可逆的に挿入されるための、傾斜縁部を備える可動カムプレートを有する。別の実施形態では、持ち上げ手段は、回転可能な半円形カムプレートを有する。
【0035】
一態様では、段階d)はガイド要素を支持体に取り付けることをさらに含む。支持体は、例えば、ガイド要素がベッド支持体又は分配器の重量を支えること及びベッド支持体又は分配器をカラムから取り外すのを促進するために水平位置及び高さ位置を維持することの両方を行うことを可能にする任意のボディ又は構造であってよい。一実施形態では、支持体はハンドリング装置である。ハンドリング装置は1つ以上のアームを有していてよく、この方法は、ベッド支持体をハンドリング装置の1つ以上のアームの上で支持すること又はベッド支持体をハンドリング装置の1つ以上のアームに着脱自在に取り付けることを含む。
【0036】
内蔵駆動システムは、電気システム、モータ駆動システム、液圧システム又は空気圧システムである。好適な態様では、駆動システムは2つ以上のシリンダを有し、保守時のアクセスために、任意の2つのシリンダの間にベッド支持体の直径より長い距離を有する。これにより、ベッド支持体及び/又は分配器を支持するのに、並びに、ベッド支持体及び/又は分配器をカラムから取り外したりベッド支持体及び/又は分配器をカラムに戻したりするのに、ハンドリング装置を使用することが可能となる。また、この配置構成により、ベッド支持体を実質的に傾斜させることを必要とせずにベッド支持体を取り外したり挿入したりすることが可能となる。これにより、操作者が懸吊されている荷重の下方に露出されることが減り、ベッド支持体を人力作業で取り扱うこと及び/又は機械的に取り扱うことが容易になる。より好適には、各シリンダは独立してカラムから取り外され得る。
【0037】
一実施形態では、カラムは、駆動システムのシリンダを定位置で機械的に固定してそれらを動かないようにする係止システムを有し、それにより、駆動システムが機能停止した場合にアダプタが作動することがなくなる。この方法は、駆動システムを用いてアダプタ組立体及び管をベース組立体の上方に3インチ(76mm)未満持ち上げた後で、係止システムを用いてアダプタ組立体及び管をベース組立体の上方で係止する段階をさらに含む。これにより操作者に高い安全性がもたらされる。
【0038】
本発明の第3の態様によると、本発明の第1の態様及び/又は第2の態様の方法を実施するのに適したクロマトグラフィーカラムが提供される。
【0039】
添付図面に関連する以下の説明により本発明の特徴及び利点が明らかとなる。
【図面の簡単な説明】
【0040】
【図1】第1の保守位置にある当技術分野で知られているカラムの一実施形態を示す断面図である。
【図2】第2の保守位置にある図1のカラムと同じ実施形態を示す断面図である。
【図3】本発明の一実施形態を示す概略分解正面図である。
【図4a】本発明によるカラムを示す概略正面図である。
【図4b】図4aのカラムを示す側断面図である。
【図4c】図4aのカラムを示す上面図である。
【図5a】アクセスのための間隙を設けるために持ち上げられて定位置で固定されたアダプタ組立体を示す正面斜視図である。
【図5b】分配器及びベッド支持体を固定する締結手段の取り外しを示す図である。
【図6】分配器又はベッド支持体を本発明によるカラムから取り外すのに/分配器又はベッド支持体を本発明によるカラムに挿入するのに使用されるハンドリング装置を示す斜視図である。
【図7a】カラム管に対するガイド要素又はレールの取り付けを示している、図5のカラムを示す斜視図である。
【図7b】ハンドリング装置の交差部材に対するガイド要素又はレールのもう一方の端部の取り付けを示す図である。
【図8a】ベッド支持体を支持するためにハンドリング装置が定位置にある、レールをカラム管及び交差部材に取り付けた後の図5のカラムを示す概略平面断面図である。
【図8b】アダプタからベッド支持体を下降させるのに使用される定位置にある引上ボルトの1つを示している、カラムを示す斜視図である。
【図8c】アダプタベッド支持体に取り付けられてレール内に配置されているローラプレートを示している、カラムを示す斜視図である。
【図9a】アダプタベッド支持体がカラムから部分的に取り外されてハンドリング装置のアームに位置合わせされている、図5のカラムを示す斜視図である。
【図9b】ハンドリング装置によりカラムから離されて取り外されているベッド支持体を示す図である。
【図10a】本発明による係止システムを示しているインセットを含む、カラムを示す斜視図である。
【図10b】ベースの上方に持ち上げられて定位置で係止される過程にあるカラム管を示す図である。
【図11】カラム管が持ち上げられて定位置で係止されており保守を行う準備ができている、カラムを示す斜視図である。
【図12a】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
【図12b】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
【図12c】ベッド支持体を持ち上げて分配器から分離するための持ち上げ手段の使用を示す図である。
【図13】ベッド支持体に取り付けられたローラプレートを示している、カラムを示す斜視図である。
【図14】下部フランジに取り付けられたレールを示している、カラムを示す斜視図である。
【図15】ハンドリング装置によりカラムから離されて取り外されている下部ベッド支持体を示す斜視図である。
【図16】カラムから取り外されて保守を行う準備ができているベッド支持体を示す図である。
【図17】カラム管が下降されてベースにボルト止めされるのを待つ状態にある、図11のカラムを示す斜視図である。
【発明を実施するための形態】
【0041】
本発明は、クロマトグラフィーカラム内で保守を行うのを可能にするための方法及び装置に関する。図1は、当技術分野で知られており米国特許第6736974号に記載されているカラム10を示しており、このカラム10は、ホイスト又はクレーンを必要とせずにクロマトグラフィーカラム内で保守を行うのを可能にする。カラム10は、上部にある分散システム14及び下部にある収集システム16を有する細長い中空円筒形ハウジング12すなわち管を有する。分散システム14は、下側端部又は内部端部(すなわち、カラムの内部)に形成される上側の円筒形のプランジャヘッド又はアダプタ20を有する円筒形ドラム18を含む。アダプタ20は、図1の第1の作動位置で示されるように、通常、管12の上側部分の中に配置される。アダプタ20は、図1に示される液圧装置などの駆動システム34によって移動され得る。アダプタ20が移動することにより、カラム内に最適な高さの充填された媒体ベッドを作るためにクロマトグラフ媒体を圧縮することが可能となり、分散システム14と収集システム16との間及び/又はアダプタ20とベース64との間にキャビティ22が形成される。
【0042】
分散システム14は、液体入口24に連結される移動層経路、並びに、入ってくる液体をキャビティ22内で収容される媒体ベッドの上部全体にわたって分配するための入口マニホルド26を有することができる。ベッド支持体(又は、入口スクリーン)28或いはフィルタが、コネクタにより、及び/又は、キャビティ22からアクセス可能である内側クランプナット30により、アダプタ20に取り付けられる。ベッド支持体28は、保守を行うために、クランプナット30を解放することによって取り外され得る;分配器プレート31も取り外し可能であってよい(分配器プレートの設計の説明は米国特許第6190560号を参照されたい)。
【0043】
作動モードにおいてアダプタ20を移動させるのに駆動システムが使用される。駆動システムは、1つ以上の、好適には3つ以上の駆動シリンダ34で構成される。駆動シリンダ34は、ドラム18に結合されている駆動ピストン36を移動させる。駆動ピストン36の一部分は、ナット42、44などを用いて駆動ピストン36に対して特定の位置で駆動ピストン36を接続アーム40に連結又は結合するのを可能にするために、ねじ山38をつけることができる。
【0044】
図1はアダプタ20の第1の保守位置を示しており、ここでは、アダプタ20が、駆動システム34及び駆動ピストン36によりシリンダ内でキャビティ22の上部54から所定の距離持ち上げられている。したがって、操作者は、分配器プレート31及びベッド支持体28をアダプタ20に対して保持するためのナット30を解放したり取り付けたりするためにドラム18の中央に手でアクセスすることができる。次いで、分配器プレート31及び/又はベッド支持体28が保守のために取り外され得る。次いで、これらの分配器プレート31及び/又はベッド支持体28がアダプタ20に取り付けられて元の位置に戻され、アダプタ20が運転モードに戻るために下降され得、必要に応じて、ナット42、44が適切な作動構成へとリセットされる。
【0045】
管112と収集システム116との間にその外側縁部162がくるように通常位置決めされる下側ベッド支持体(又はスクリーン)160を取り外すといったような第2の保守作業を実施するために、図2に示されるように管112が駆動システムによって持ち上げられ得る。通常は管112をベース164に固定しているボルトが取り外され、管112をドラム118と共に示されるように上方向に動かすために、ナット142、144がピストン136に結合され得る。このとき、ベッド支持体160をベース164に取り付けているナット132を緩めて保守のためにベッド支持体160を取り外すために操作者がアクセスできるようにするための間隙が形成される。保守が完了すると、操作者により、ベッド支持体160が元の位置に戻されてナット132によりベース164に取り付けられ、逆のプロセスで、管112及びドラム118が作動位置まで下降される。
【0046】
次に、図3〜13を参照して本発明を説明する。図3〜8は、上側アダプタ組立体へのアクセスを実現することに関し、図9〜13は保守のためにベース組立体へのアクセスを実現することに関する。
【0047】
図3は、本発明によるカラムの概略分解正面図である。このカラムは、製薬業界で一般的であるGMP環境で使用されるのに適したステンレス鋼及び別の材料などの、強靭な不活性材料で作られる。カラム210は、カラムの高さ及び/又はレベルを修正するために調整可能である足部206を有する脚部204上で支持される。脚部204は、一方の端部にあるベース組立体263をもう一方の端部にあるアダプタ組立体215から分離する円筒形ハウジング又は管212を有するカラム210を支持する。管212は、通常、ステンレス鋼又は別の強靭な不活性材料から作られてよい。アダプタ組立体215にはノズル211を有する分散システムが隣接しており、ノズル211は、緩衝液又は別の適切な移動相液体或いは分離される化学薬品/材料を導入するための移動相経路と、液体入口209とを含む。管212は、1つ以上のシリンダ234を有する駆動システムによりアダプタ組立体215及びベース組立体263に連結され得る。駆動システムは示されるように液圧システムであってよく、又は、空気圧手段又は電気的手段などの別の適当な手段によって動力を供給されてもよい。アダプタ組立体215は、例えば、カラム内で化学薬品のクロマトグラフ分離を行うのに使用されるクロマトグラフ媒体のベッドを充填又は圧縮するために、作動モードにおいて管212のキャビティ222内で移動可能である。アダプタ組立体215は、アダプタフランジ217と、1つ以上の間隔柱(distance pillar)219と、通常はステンレス鋼で作られるバッキングプレート220と、液体を均一に分配するために多数のチャネルを有するプレートの形態をとることができる分配器231と、スクリーン又はメッシュ又はフィルタを有するベッド支持体228と、任意選択の封止リング(例えば、229)とを有する。ベッド支持体は、不活性プラスチック、又は、ステンレス鋼などの金属材料で作られてよい。分配器231及びベッド支持体228は解放可能な固定手段(図示せず)によって互いに締結される。典型的な解放可能な固定手段には、限定しないが、ねじ、ナット又はクランプが含まれる。固定手段(図示せず)は、分配器231又はバッキングプレート220の外面からのみ、すなわちキャビティ222から最も遠いプレートの面からのみアクセスされて解放され得る。この実施例では、固定手段(図示せず)へのアクセスを可能にするためには、ノズル211が最初に取り外されなければならない。バッキングプレート、分配器及びベッド支持体を一体に締結するために、適宜、バッキングプレートの外面からアクセス可能である追加の解放可能な固定手段が使用され得る。これらの固定手段は、構成要素の周囲部の周りの対応する孔を通して挿入されるボルトの形態をとることができる。バッキングプレート又は分配器の外面からアクセスすることにより、カラム内で懸吊されている又は支持されている荷重に対して操作者が不必要に露出されることが回避される。
【0048】
ベース組立体263は、解放可能な固定手段269によって互いに締結される、分配器266及びベッド支持体268並びに任意選択のバッキングプレート264を有する。ベッド支持体268は、スクリーン又はメッシュ又はフィルタ及び任意選択の封止リング(例えば、274)を有する。ベッド支持体は、不活性プラスチック、又は、ステンレス鋼などの金属材料で作られてよい。解放可能な固定手段269は、例えば、ねじ、ナット、ボルト又はクランプであるが、別の解放可能な固定手段も可能であることが認識されよう。図から分かるように、固定手段269は、各構成要素内の中心孔を通してベッド支持体268及び分配器266を固定する。固定手段269は分配器266の外面からのみアクセス可能であり、したがって、分配器266の外面からのみ解放可能である。図3では、固定手段269を解放するためのアクセスを設けるためには、ノズル272が最初に取り外されなければならない。バッキングプレート、分配器及びベッド支持体を一体に締結するために、適宜、バッキングプレートの外面からアクセス可能である追加の解放可能な固定手段が使用され得る。これらの固定手段は、構成要素の周囲部の周りの対応する孔を通して挿入されるボルトの形態をとることができる。バッキングプレート264の外面からアクセスすることにより、カラムの内部からのみアクセスが可能である場合のように懸吊されている荷重の下方に操作者が露出されることが回避される。
【0049】
管212がクロマトグラフ媒体で満たされている場合、カラム上での化学物質又は生物物質の分離が下向きの流れ又は上向きの流れのいずれかで行われ得ることが理解されよう。したがって、下向きの流れの場合、分離される化学物質又は生物物質を含有する液体は、ノズル211を通して導入され、媒体のベッドを通って下方向に移動し、ノズル272を通って出口ポート(図4bの375)を介して、カラムのベースのところにある収集システム内で収集される。上向きの流れの形態の場合、分離すべき物質を含有する液体は、下部ノズル272を介して導入され、媒体ベッドを通して上方向に流れ、ノズル211を通って出口ポート(図4bの305)を介してカラムの上部で収集される。分かりやすいように、下向きの流れの形態において、カラムの保守又は補修を説明する。
【0050】
アダプタ組立体215又は分配器231に対して保守を行うために、アダプタフランジ217を上側カラムフランジ213aに接合しているナットを外すことによりアダプタ組立体215がカラム管212から切り離される。次いで、駆動システムが、シリンダ234を用いて、3インチ(76mm)未満の距離、通常は2インチ(50mm)未満の距離アダプタ組立体215を持ち上げ、それにより間隙が形成され、この間隙を通して、ベッド支持体268及び/又は分配器266が取り外され得る。アダプタ組立体215が、シリンダブラケット236、シリンダ234及び組立体215内の位置合わせされた孔を通して挿入されるプランジャ237により、係止システム270を使用して定位置で係止される。この固定位置では、固定手段が解放されると、アダプタベッド支持体及び/又は分配器を保守のためにカラムから取り外すことができ、この解放は、上述したように、ノズル211を取り外した後で、カラムの外面〜取り外すことによって行われる。カラム上で保守が行われた後(例えば、ベッド支持体228が交換される)、上記の手順を逆転させることにより、カラム210が再び作動可能となる:アダプタ組立体215が、プランジャ237を取り外すことにより固定位置から解放され、次いで、シリンダ234を使用して下降され、次いで、アダプタフランジ217を上側カラムフランジ213aに接合するためのナットを元の位置に戻すことによりカラム管212に再連結される。
【0051】
下部分配器266又はベース組立体263に対する保守又は補修は、ベース263から管212を解放して、駆動システムの補助により、3インチ(76mm)の距離、通常は2インチ(50mm)の距離管212及びアダプタ組立体215を持ち上げることにより、実施される。下部バッキングプレート264に接合しているカラム管212の下側フランジ213b上のボルトが取り外される。次いで、カラム管212及びアダプタ組立体215が駆動シリンダ234によって持ち上げられる。管212及び上側アダプタ組立体が、係止ピン238及びブラケット236内の位置合わせされた孔を通してプランジャ(図示せず)を挿入することにより、シリンダブラケット236を備えるベースの上方の定位置に係止システム270により固定される。
【0052】
次いで、下部ノズル272がバックプレート264及び分配器266から切り離される。ノズル272が間隔リング235と共に取り外され、それにより、ナットの形態であってよい固定手段269を解放するためにアクセスすることが可能となる。ナット269が、分配器266の外面、すなわちキャビティ222から離れた面から取り外され、ひいては、懸吊されている又は支持されている荷重に対して操作者が露出されなくなる。バッキングプレート、分配器及びベッド支持体を通して挿入されるボルトなどの上述した追加の解放可能な固定手段が存在する場合、これらの追加の解放手段をバッキングプレートの外面から取り外さなければならない。この時点で、ベッド支持体268及び/又はOリングの交換又は洗浄といったような保守及び補修のために、カラムの内部にアクセスできる。カラムを作動モードに戻すためには、上述の手順が逆転される。
【0053】
図4aは、本発明によるカラムの概略正面図である。カラム310は脚部304上で支持され、管312によりアダプタ組立体315から分離されるベース組立体363を有する。これらの構成要素は、製薬業界においてGMPに認可されている、ステンレス鋼などの強靭な不活性材料で作られる。図では、ベース組立体363及びアダプタ組立体は、3つの液圧シリンダ334の形態をとる駆動システムに連結されている。別の実施形態では、カラムを持ち上げたり下降させたりするのに、圧縮空気又は電気により動力を供給されるような別の駆動システムが使用されもよいことが理解されよう。また、3つのシリンダが使用されることは必須ではなく、一部の事例では1つのシリンダで十分である。カラム310は、カラム内に液体を導入するための、上部ノズル311及び下部ノズルを備える。駆動システム/シリンダ334に取り付けられた液圧組立体378も示されている。
【0054】
図4bは、液圧シリンダ334のうちの1つを断面で示している図4aのカラムの側断面図である。クロマトグラフ媒体のベッドを収容するためのキャビティ322を断面で見ることができる。カラム310に液体を導入したりカラム310から液体を除去したりするための、上部ノズル311及び下部ノズル372の液体入口305、375及び出口306、376が示されている。シリンダ334は、ベース組立体(ここでは、バッキングプレート364、分配器366及びベッド支持体368を有して示される)並びにアダプタ組立体315(ここでは、バッキングプレート320、分配器331及びベッド支持体328を有して示される)に連結されている。
【0055】
図4cは図4aのカラムの上面図であり、3つの液圧シリンダ334と、液体入口305及び出口306を備えるノズル311とを示している。
【0056】
保守を行うことを目的としてアダプタ組立体315を持ち上げるために、アダプタ315とカラムフランジ313aとを接合している上側カラムフランジの下のナットが緩められて外される。次いで、駆動システムが、液圧シリンダ334を用いて、3インチ(76mm)未満の距離、通常は2インチ(50mm)未満の距離アダプタ組立体315を持ち上げる。アダプタ組立体315は、組立体を補修位置又は保守位置(図3を参照)で固定するために、シリンダブラケット(図示せず)内の孔、液圧シリンダ334内の孔及びアダプタ組立体315内の孔が位置合わせされてプランジャ(図示せず)により定位置で係止されるまで、持ち上げられる。
【0057】
図5aは、間隙427を設けるために定位置まで持ち上げられて固定されているアダプタ組立体415を示す正面斜視図であり、ベッド支持体428及び/又は分配器431はこの間隙427を通して取り外され得る。この図では例示のために間隙427は明瞭に示されているが、操作者が誤って中に手を入れたり懸吊されている重い荷重に対して自分の腕を露出したりするのを防止するために、間隙427は、3インチ(76mm)未満であり、通常は2インチ(50mm)未満である。カラム410は、3つの液圧シリンダ434を有する駆動システムを有する。この時点では、アダプタベッド支持体428、分配器431及びバッキングプレート420は可視であり、ベッド支持体428は、間隙427にアクセスすることなく固定手段(図示せず)を解放することにより分配器431から外され得る。このプロセスを説明するために図4を参照する。この図4では、ベッド支持体328を分配器331に固定している保持用ナット(図示せず)を間隙427にアクセスせずに取り外すためのアクセスを与えるために、ノズル311が最初に取り外される。固定ナットが分配器331の外面から取り外される。
【0058】
図5bは、スパナ446を使用してアダプタ組立体のバッキングプレート420側から固定手段を解放するところを示している。固定手段(スパナに隠れているが、保持用のナットの形態である)がアダプタベッド支持体を分配器に固定している。
【0059】
ハンドリング装置580の一実施形態が図6に示されている。装置580は、脚部583を有するフレーム582上で支持される中央柱581を備えるトロリー又はカートの形態である。装置580は強靭な不活性材料で作られ、このような材料には、限定しないが、製薬業界で一般的であるGMP環境で使用されるのに適した、ステンレス鋼及び別の材料が含まれる。延長可能アーム585a、b、cが柱581から突出しており、これらの延長可能アーム585a、b、cは、機械的手段又は別の手段により柱581に対して上昇又は下降され得る。示される実施形態では、アーム585a、b、cは、装置を操向又は制御するための手段を与えるハンドル589に隣接する手動のジャッキ機構584により上昇又は下降される。585a、b、cは分配器又はベッド支持体の重量を支承するように設計されており、これらの構成要素の直径まで延長可能である。示される実施形態は3つのアーム585a、b、cを有するが、この装置がそれのみに限定されないこと、及び、別の実施形態が個々の設計に応じて3つより少ない又は多いアーム(例えば、1つ、2つ、4つ、5つ)を有し得ることを理解されたい。特に輸送時に安全のために分配器及び/又はベッド支持体をアームにボルト止め又は固定するために、アーム585a、b、cの末端のところに孔(図示せず)が設けられる。これらの構成要素がアームに接触するときにベッド支持体/分配器が損傷するいかなるリスクも最小にするために、アーム585a、b、cにパッド(図示せず)が装着されてよい。ベッド支持体又は分配器の中央孔を受けるための隆起した中央要素588(通常は円錐形状)が、これらの構成要素を装置580のアーム585a、b、c上で心合わせするための手段を与える。この要素588は、アーム585a、b、cが交差する箇所の上側又は下側のいずれか又は両方に装着され得る。交差部材586が柱581に対して直角に突出しており、引上ボルト587を使用することにより上昇又は下降され得るようになっている。交差部材586は、ベッド支持体を取り外したり挿入したりするのを容易にするために部材586及びカラム管(図示せず)に可逆的に取り付けられ得るガイド要素(図示せず)を支持するのに使用される。
【0060】
作動時、分配器及び/又はベッド支持体は、アーム585a、b、cから懸吊されるか又はアーム上で支持される。枢動ホイールによりハンドリング装置580が容易に移動すること及び容易に操作されることが可能となる。示される実施形態では、装置580を移動させること及びアーム585a、b、cを上昇/延長させることは手動の手段によって行われるが、装置580を駆動させるための及びアーム585を上昇/下降させるための動力システム(例えば、電気システム、空気圧システム又は液圧システム)を組み込む別の実施形態も可能であることが理解されよう。
【0061】
ハンドリング装置の別の実施形態も可能であり、例えばそれらの実施形態では、アーム585a、b、cの端部にある孔(図示せず)が、アーム585b、cがベッド支持体又は分配器の外側リムに接触するときに、ベッド支持体又は分配器の側面にある対応する孔に位置合わせされるように構成され、それにより、ねじを位置合わせされた孔にねじ込むことによりベッド支持体又は分配器をアームに容易に取り付けることが可能となる。
【0062】
図7aは、カラム管612の上側フランジに取り付けられるレールの形態のガイド要素690を示しており、カラム管は保護プラスチック656で覆われている。レール690がベッド支持体628のすぐ下に配置されており、したがって、任意の固定手段(例えば、ねじ)を取り外した後で、ベッド支持体がレール690の上方の位置まで緩やかに下降され得る。
【0063】
ハンドリング装置680の交差部材686の高さは、突出するガイド要素又はレール690の高さに一致するように調整され、それにより、レール690及び交差部材686が互いに固定される(図7b)。
【0064】
図8aは、ベッド支持体728を受けるように位置決めされたハンドリング装置780を示す、カラム710の断面の概略平面図であり、ベッド支持体をアダプタに固定している、取り外される第1の4つのねじの位置が矢印で示されている。これらの4つのねじは取り外されて、残りの保持用ねじを取り外す際にベッド支持体を下降又は上昇させるのに使用される4つの引上ボルト(図示せず)に交換される。すべての保持用ねじが取り外された後、ベッド支持体728が引上ボルト758(図8b)により直角方向に緩やかに下降され、最終的にベッド支持体728はレール790の表面の上方の約10mmのところにくる。Oリングがベッド支持体の外側リムから持ち上げられて分配器の下に押し込まれ、それにより、挿入される移送手段(図示せず)に接触することが回避される。移送手段792(すなわち、示される実施形態ではローラプレート)がベッド支持体728に取り付けられ、ベッド支持体728が緩やかに下降され、最終的に、ローラプレート792がレール790上に堅固に載置される(図8c)。ベッド支持体728をローラプレート792に取り付けることなく、ベッド支持体728が、レール790上に載置されている移送手段すなわちローラプレート792上まで単純に下降され得るような、別の実施形態も可能であることが理解されよう。
【0065】
ベッド支持体828は十分な距離カラムから外れるように転動され、それにより、ベッド支持体が、ハンドリング装置880のアーム885の上の中央要素886及び支持体パッド885x、z(1つはカラムの後ろに隠れている)に位置合わせされるようにすることができる(図9a)。図9bに示されるように、次いで、ハンドリング装置880がベッド支持体828の全重量を支持するまで、装置880のアーム885が持ち上げられる。レール890がハンドリング装置880から切り離され、ベッド支持体がカラムから離れるように直角方向にゆっくり移動される。この時点で、ローラプレート892が切り離され得、保守が実施される領域までベッド支持体828が移動され得るようなる。
【0066】
作動モードに戻す場合、上述の手順が単純に逆転される。ベッド支持体及び/又は分配器がカラムに戻され、互いに固定されてバッキングプレートに取り付けられ、ノズルが再び取り付けられ、アダプタ組立体が下降されてカラム管にボルト止めされる。
【0067】
次に、図10から17を参照して、下部ベッド支持体及びカラムの内部へのアクセスについて説明する。下部ベッド支持体へのアクセスを可能にするために、下部ノズルが取り外され、次いで、管をベースに接合しているボルトを外すことにより管がベース組立体から解放され、それにより、管及び上側アダプタ組立体が液圧シリンダを用いて持ち上げられ得る。
【0068】
図10aは、図3から図5及び図7から図9において上で説明されたカラム910を示している。バックプレートのバッキングプレート964に取り付けているボルトを外すことにより、下部ノズル(図3の272を参照)が取り外される;ここでは、これらのボルトは、図5b示されるスパナと同様のスパナを使用してベース組立体のバッキングプレート側から取り外される。管912を下部バッキングプレート964に締結している、カラム管の下側フランジ913b上のボルトが緩められて外される。カラム管912及びアダプタ組立体915が、駆動システムの液圧シリンダ934により、ベース組立体の上方に3インチ(76mm)未満だけ持ち上げられて、係止システム(上記の図3で既に説明した係止システム270の一部を示す図10aのインセットを参照)により定位置で固定される。プランジャ937が、係止ピン938内の及びブラケット936内の位置合わせされた孔に導入され、それにより、管及びアダプタ組立体が定位置で固定される(図10b)。管912を下部バッキングプレート964に固定しているボルトを取り外した後、管及びアダプタ組立体を持ち上げることによって形成される間隙927内においてカラムに対して保守を実施することができる。操作者がアクセスするのを制限するために、この間隙は3インチ(7.62cm)未満、通常は2インチ(5.08cm)未満である。
【0069】
図11は、管1012が持ち上げられてシリンダ934に機械的に係止されており、保守を行う準備ができている状態の、カラム1010を示している。ベッド支持体1068を分配器1066に締結している保持用ナット(又は、固定手段)がカラム1010のバッキングプレート1064側から解放される。ベッド支持体を分配器及びバッキングプレートに締結しているボルト(図示せず)などの追加の固定手段が存在し、バッキングプレートの周囲部上に配置されている場合、これらの追加の固定手段がカラムのバッキングプレート面から解放される。
【0070】
下部ベッド支持体1068を移送手段/ローラプレート(図示せず)に装着できるようにするには、したがってカラム1010から取り外せるようにするには、下部ベッド支持体1068を上方に持ち上げて分配器1066から離さなければならない。これは、図12a、12b及び12cに示される持ち上げ手段1194を使用することにより達成される。一実施形態では、持ち上げ手段は持ち上げプレートであり、好適には、バッキングプレート1164のリムの周りに等距離で配置される4つの持ち上げプレート1194である。各持ち上げ手段1194は、傾斜縁部を有する半円形カム1195を含む。カム1195が図12aに示されるように配置されてレバー1196により図12bに示されるように回転されると、カム1195がベッド支持体1168と分配器1166との間に挿入される。引上ボルト1197(図12cに示される)を回転することにより、4つのすべてのカム1195上で支持されるベッド支持体1168が、移送手段又はローラプレート1292をベッド支持体1268の外側リング(図13)の下側に装着してさらにレール1390(図示せず)を管の下部フランジ1313b(図14)の下側に装着するのに十分な距離で、上方に持ち上げられる。次いで、レール1390の反対側の端部がハンドリング装置(図示せず)の交差部材に取り付けられ得る。
【0071】
ベッド支持体が、ベッド支持体に装着されているローラプレートと共に、4つのすべての持ち上げプレート上にある引上ボルトを使用してレールに対して直交方向に下降される。引上ボルト及び持ち上げプレートが取り外され(4つとも取り外され得るが、2つのみを取り外すことで十分である)、ベッド支持体1468がレール1490に沿って外に転動され、最終的に、ねじ切りされた中央スリーブがハンドリング装置の中央要素1488に位置合わせされ、リムのねじ切りされた孔がハンドリング装置のアーム1485a、b、c(図15)上の対応する孔に位置合わせされる。ベッド支持体1468が、ねじボルト又はねじによりアーム1485a、b、cに取り付けられ、次いで、ハンドリング装置によりレール1490のレベルの上方まで持ち上げられる。レール1490がハンドリング装置及びローラプレート1492から取り外されると、ベッド支持体1468が保守を行うための位置まで移動され得る。
【0072】
次いで、必要に応じて、ベッド支持体が洗浄され得るか又はOリングが交換され得る。洗浄及び補修を容易にするために、概略的には、ベッド支持体1568は、図16に示されるようにカラムから離れるように移動され、ある表面(トロリー又はワークベンチなど)上まで下降され、ハンドリング装置1580のアーム1585から解放される。分配器(図11の1066)も、持ち上げ装置を使用して同様の手法で取り外されて補修され得る。
【0073】
保守及び補修が完了した後、上述したプロセスを単に逆転させることにより、カラムは作動モードに戻される。これには、ベッド支持体及び/又は分配器をカラム内に戻すこと、これらの構成要素をバッキングプレートに取り付けること、管及びアダプタ組立体を下降させること、並びにノズルを再取り付けすることが含まれる。図17が、液圧制御ユニット1699に連結された図11のカラム1610を示しており、管1612が下降されており、バッキングプレート1664にボルト止めされる準備ができている。
【0074】
本発明の好適な例示の実施形態を説明したが、単に例示ために提示され、限定するためのものではない、説明した実施形態以外の実施形態によっても本発明が実施され得ることを、当業者であれば認識するであろう。本発明は以下の特許請求の範囲のみによって限定される。
【特許請求の範囲】
【請求項1】
クロマトグラフィーカラム又はその部品に対して保守を行うための方法であって、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体を備える管であって、前記アダプタ組立体が、作動モードにおいて前記管のキャビティ内で移動可能であり、前記アダプタ組立体が、解除可能な固定手段によって互いに締結されるバッキングプレートと分配器とベッド支持体とを備えている、管と、
分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)前記アダプタ組立体を前記管から切り離す段階と、
c)前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために前記駆動システムを用いて前記アダプタ組立体を前記管の上方に持ち上る段階と、
d)ガイド要素を前記管に取り付ける段階と、
e)前記カラムの内部にアクセスせずに、前記分配器及び前記バッキングプレートから前記ベッド支持体を外す段階と、
f)前記カラムの内部にアクセスせずに、前記ガイド要素を用いて前記ベッド支持体を前記カラムから取り外す段階と、
g)前記カラム及び/又は前記ベッド支持体及び/又は前記1つ以上のシールに対して保守を行う段階と、
h)前記カラムの内部にアクセスせずに、前記ベッド支持体を前記カラムに戻して前記ベッド支持体及び前記バッキングプレートを前記分配器に締結する段階と、
i)前記管から前記ガイド要素を解放する段階と、
j)前記管内の作動位置まで前記アダプタ組立体を下降させて前記アダプタ組立体を前記管に再連結する段階と
を含む方法。
【請求項2】
段階c)が、前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記アダプタ組立体を前記管の上方に3インチ(76mm)未満の距離持ち上げることを伴う、請求項1記載の方法。
【請求項3】
段階c)が、前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記アダプタ組立体を前記管の上方に2インチ(50mm)未満の距離持ち上げることを伴う、請求項1又は請求項2記載の方法。
【請求項4】
前記ガイド要素がガイドレールである、請求項1乃至請求項3のいずれか1項記載の方法。
【請求項5】
段階f)及び/又は段階h)が、前記ガイド要素に沿って前記ベッド支持体を移動させるために移送手段を使用することをさらに含む、請求項1乃至請求項4のいずれか1項記載の方法。
【請求項6】
前記移送手段がローラプレートである、請求項5記載の方法。
【請求項7】
段階d)が、前記ガイド要素を支持体に取り付けることをさらに含む、請求項1乃至請求項6のいずれか1項記載の方法。
【請求項8】
前記支持体がハンドリング装置である、請求項7記載の方法。
【請求項9】
前記ハンドリング装置が1つ以上のアームを有し、前記方法が、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームの上で支持すること、又は、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームに取り付けることを含む、請求項8記載の方法。
【請求項10】
前記駆動システムが、電気システム、モータ駆動システム、液圧システム又は空気圧システムである、請求項1乃至請求項9のいずれか1項記載の方法。
【請求項11】
クロマトグラフィーカラム又はその部品に対して保守を行うための方法であって、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体及びベース組立体を備える管であって、前記アダプタ組立体が作動モードにおいて前記管のキャビティ内で移動可能であり、
前記ベース組立体が、解放可能な固定手段によって互いに締結される、分配器、バッキングプレート及びベッド支持体を有する、管と、
前記分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)前記管を前記ベース組立体から解放する段階と、
c)前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために前記駆動システムを用いて前記管及び前記アダプタ組立体を前記ベース組立体の上方に持ち上げる段階と、
d)ガイド要素を前記管に取り付ける段階と、
e)前記カラムの内部にアクセスせずに、前記分配器及び前記バッキングプレートから前記ベッド支持体を外す段階と、
f)前記カラムの内部にアクセスせずに、前記ガイド要素を用いて前記ベッド支持体を前記カラムから取り外す段階と、
g)前記カラム及び/又は前記ベッド支持体及び/又は前記1つ以上のシールに対して保守を行う段階と、
h)前記カラムの内部にアクセスせずに、前記ベッド支持体を前記カラムに戻して前記ベッド支持体を前記バッキングプレート及び前記分配器に締結する段階と、
i)前記管から前記ガイド要素を解放する段階と、
j)前記管及び前記アダプタ組立体を作動位置まで下降させて前記管を前記ベース組立体に再連結する段階と
を含む方法。
【請求項12】
段階c)が、前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記管及び前記アダプタ組立体を前記ベース組立体の上方に3インチ(76mm)未満持ち上げることを伴う、請求項11記載の方法。
【請求項13】
段階c)が、前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記管及び前記アダプタ組立体を前記ベース組立体の上方に2インチ(50mm)未満持ち上げることを伴う、請求項11又は請求項12記載の方法。
【請求項14】
前記ガイド要素がガイドレールである、請求項11乃至請求項13のいずれか1項記載の方法。
【請求項15】
段階f)及び/又は段階h)が、前記ガイド要素に沿って前記ベッド支持体を移動させるために移送手段を使用することをさらに含む、請求項11乃至請求項14のいずれか1項記載の方法。
【請求項16】
前記移送手段がローラプレートである、請求項15記載の方法。
【請求項17】
段階e)の後、前記ベッド支持体が、前記バッキングプレートに取り付けられた持ち上げ手段により前記分配器の上方に持ち上げられる、請求項11乃至請求項16のいずれか1項記載の方法。
【請求項18】
前記持ち上げ手段が、前記ベッド支持体と前記分配器との間に可逆的に挿入されるための、傾斜縁部を備える可動カムプレートを有する、請求項17記載の方法。
【請求項19】
段階d)が前記ガイド要素を支持体に取り付けることをさらに含む、請求項11乃至請求項18のいずれか1項記載の方法。
【請求項20】
前記支持体がハンドリング装置である、請求項19記載の方法。
【請求項21】
前記ハンドリング装置が1つ以上のアームを有し、前記方法が、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームに固定することにより前記ベッド支持体を懸吊又は添着することを含む、請求項20記載の方法。
【請求項22】
前記駆動システムが、電気システム、モータ駆動システム、液圧システム及び空気圧システムである、請求項11乃至請求項21のいずれか1項記載の方法。
【請求項23】
請求項1乃至請求項22のいずれか1項記載の方法を実施するのに適したクロマトグラフィーカラム。
【請求項1】
クロマトグラフィーカラム又はその部品に対して保守を行うための方法であって、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体を備える管であって、前記アダプタ組立体が、作動モードにおいて前記管のキャビティ内で移動可能であり、前記アダプタ組立体が、解除可能な固定手段によって互いに締結されるバッキングプレートと分配器とベッド支持体とを備えている、管と、
分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)前記アダプタ組立体を前記管から切り離す段階と、
c)前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために前記駆動システムを用いて前記アダプタ組立体を前記管の上方に持ち上る段階と、
d)ガイド要素を前記管に取り付ける段階と、
e)前記カラムの内部にアクセスせずに、前記分配器及び前記バッキングプレートから前記ベッド支持体を外す段階と、
f)前記カラムの内部にアクセスせずに、前記ガイド要素を用いて前記ベッド支持体を前記カラムから取り外す段階と、
g)前記カラム及び/又は前記ベッド支持体及び/又は前記1つ以上のシールに対して保守を行う段階と、
h)前記カラムの内部にアクセスせずに、前記ベッド支持体を前記カラムに戻して前記ベッド支持体及び前記バッキングプレートを前記分配器に締結する段階と、
i)前記管から前記ガイド要素を解放する段階と、
j)前記管内の作動位置まで前記アダプタ組立体を下降させて前記アダプタ組立体を前記管に再連結する段階と
を含む方法。
【請求項2】
段階c)が、前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記アダプタ組立体を前記管の上方に3インチ(76mm)未満の距離持ち上げることを伴う、請求項1記載の方法。
【請求項3】
段階c)が、前記アダプタ組立体と前記管との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記アダプタ組立体を前記管の上方に2インチ(50mm)未満の距離持ち上げることを伴う、請求項1又は請求項2記載の方法。
【請求項4】
前記ガイド要素がガイドレールである、請求項1乃至請求項3のいずれか1項記載の方法。
【請求項5】
段階f)及び/又は段階h)が、前記ガイド要素に沿って前記ベッド支持体を移動させるために移送手段を使用することをさらに含む、請求項1乃至請求項4のいずれか1項記載の方法。
【請求項6】
前記移送手段がローラプレートである、請求項5記載の方法。
【請求項7】
段階d)が、前記ガイド要素を支持体に取り付けることをさらに含む、請求項1乃至請求項6のいずれか1項記載の方法。
【請求項8】
前記支持体がハンドリング装置である、請求項7記載の方法。
【請求項9】
前記ハンドリング装置が1つ以上のアームを有し、前記方法が、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームの上で支持すること、又は、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームに取り付けることを含む、請求項8記載の方法。
【請求項10】
前記駆動システムが、電気システム、モータ駆動システム、液圧システム又は空気圧システムである、請求項1乃至請求項9のいずれか1項記載の方法。
【請求項11】
クロマトグラフィーカラム又はその部品に対して保守を行うための方法であって、
a)液体入口に連結される移動相経路を含むノズルを備える分散システムと、
内蔵駆動システムに連結されるアダプタ組立体及びベース組立体を備える管であって、前記アダプタ組立体が作動モードにおいて前記管のキャビティ内で移動可能であり、
前記ベース組立体が、解放可能な固定手段によって互いに締結される、分配器、バッキングプレート及びベッド支持体を有する、管と、
前記分散システムの反対側にある収集システムと、
1つ以上のシールと
を有するクロマトグラフィーカラムを準備する段階と、
b)前記管を前記ベース組立体から解放する段階と、
c)前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために前記駆動システムを用いて前記管及び前記アダプタ組立体を前記ベース組立体の上方に持ち上げる段階と、
d)ガイド要素を前記管に取り付ける段階と、
e)前記カラムの内部にアクセスせずに、前記分配器及び前記バッキングプレートから前記ベッド支持体を外す段階と、
f)前記カラムの内部にアクセスせずに、前記ガイド要素を用いて前記ベッド支持体を前記カラムから取り外す段階と、
g)前記カラム及び/又は前記ベッド支持体及び/又は前記1つ以上のシールに対して保守を行う段階と、
h)前記カラムの内部にアクセスせずに、前記ベッド支持体を前記カラムに戻して前記ベッド支持体を前記バッキングプレート及び前記分配器に締結する段階と、
i)前記管から前記ガイド要素を解放する段階と、
j)前記管及び前記アダプタ組立体を作動位置まで下降させて前記管を前記ベース組立体に再連結する段階と
を含む方法。
【請求項12】
段階c)が、前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記管及び前記アダプタ組立体を前記ベース組立体の上方に3インチ(76mm)未満持ち上げることを伴う、請求項11記載の方法。
【請求項13】
段階c)が、前記管及び前記アダプタ組立体と前記ベース組立体との間にアクセス用の間隙を設けるために、前記駆動システムを用いて、前記管及び前記アダプタ組立体を前記ベース組立体の上方に2インチ(50mm)未満持ち上げることを伴う、請求項11又は請求項12記載の方法。
【請求項14】
前記ガイド要素がガイドレールである、請求項11乃至請求項13のいずれか1項記載の方法。
【請求項15】
段階f)及び/又は段階h)が、前記ガイド要素に沿って前記ベッド支持体を移動させるために移送手段を使用することをさらに含む、請求項11乃至請求項14のいずれか1項記載の方法。
【請求項16】
前記移送手段がローラプレートである、請求項15記載の方法。
【請求項17】
段階e)の後、前記ベッド支持体が、前記バッキングプレートに取り付けられた持ち上げ手段により前記分配器の上方に持ち上げられる、請求項11乃至請求項16のいずれか1項記載の方法。
【請求項18】
前記持ち上げ手段が、前記ベッド支持体と前記分配器との間に可逆的に挿入されるための、傾斜縁部を備える可動カムプレートを有する、請求項17記載の方法。
【請求項19】
段階d)が前記ガイド要素を支持体に取り付けることをさらに含む、請求項11乃至請求項18のいずれか1項記載の方法。
【請求項20】
前記支持体がハンドリング装置である、請求項19記載の方法。
【請求項21】
前記ハンドリング装置が1つ以上のアームを有し、前記方法が、前記ベッド支持体を前記ハンドリング装置の前記1つ以上のアームに固定することにより前記ベッド支持体を懸吊又は添着することを含む、請求項20記載の方法。
【請求項22】
前記駆動システムが、電気システム、モータ駆動システム、液圧システム及び空気圧システムである、請求項11乃至請求項21のいずれか1項記載の方法。
【請求項23】
請求項1乃至請求項22のいずれか1項記載の方法を実施するのに適したクロマトグラフィーカラム。
【図1】


【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図5a】
【図5b】
【図6】
【図7a】
【図7b】
【図8a】
【図8b】
【図8c】
【図9a】
【図9b】
【図10a】
【図10b】
【図11】
【図12a】
【図12b】
【図12c】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図5a】
【図5b】
【図6】
【図7a】
【図7b】
【図8a】
【図8b】
【図8c】
【図9a】
【図9b】
【図10a】
【図10b】
【図11】
【図12a】
【図12b】
【図12c】
【図13】
【図14】
【図15】
【図16】
【図17】
【公表番号】特表2013−514526(P2013−514526A)
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2012−543604(P2012−543604)
【出願日】平成22年12月8日(2010.12.8)
【国際出願番号】PCT/EP2010/069159
【国際公開番号】WO2011/073067
【国際公開日】平成23年6月23日(2011.6.23)
【出願人】(597064713)ジーイー・ヘルスケア・バイオサイエンス・アクチボラグ (109)
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成22年12月8日(2010.12.8)
【国際出願番号】PCT/EP2010/069159
【国際公開番号】WO2011/073067
【国際公開日】平成23年6月23日(2011.6.23)
【出願人】(597064713)ジーイー・ヘルスケア・バイオサイエンス・アクチボラグ (109)
[ Back to top ]