
クローズドループ方式光干渉角速度計
【課題】温度特性の良い自己診断機能を備えたクローズドループ方式光干渉角速度計を提供する。
【解決手段】位相変調信号に自己診断用の擬似角速度を重畳して位相変調器に供給する擬似角速度信号発生部を具備し、擬似角速度信号発生部は、ゲイン制御部と、擬似信号発生回路と、加算器と、D/A変換器とを備える。ゲイン制御部は、診断用に設定される角速度に相当する位相差としきい値と基準しきい値とを入力として、しきい値を基準しきい値で除したゲイン係数を、診断用の角速度に相当する位相差に乗じて診断用位相差として出力する。擬似信号発生回路は、階段状鋸歯状波の擬似角速度信号を生成する。加算器は、位相変調信号と擬似角速度信号とを加算する。D/A変換器は、加算器の出力信号をディジタル/アナログ変換して位相変調器に供給する。
【解決手段】位相変調信号に自己診断用の擬似角速度を重畳して位相変調器に供給する擬似角速度信号発生部を具備し、擬似角速度信号発生部は、ゲイン制御部と、擬似信号発生回路と、加算器と、D/A変換器とを備える。ゲイン制御部は、診断用に設定される角速度に相当する位相差としきい値と基準しきい値とを入力として、しきい値を基準しきい値で除したゲイン係数を、診断用の角速度に相当する位相差に乗じて診断用位相差として出力する。擬似信号発生回路は、階段状鋸歯状波の擬似角速度信号を生成する。加算器は、位相変調信号と擬似角速度信号とを加算する。D/A変換器は、加算器の出力信号をディジタル/アナログ変換して位相変調器に供給する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自己診断機能を備えたクローズドループ方式光干渉角速度計に関する。
【背景技術】
【0002】
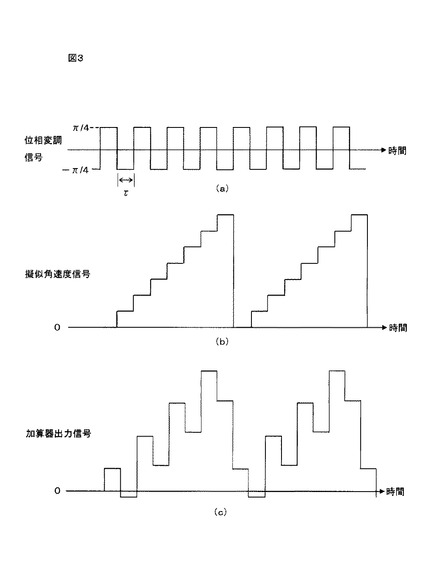
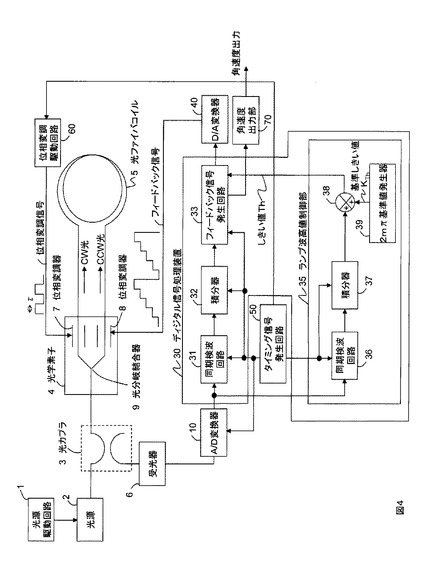
図4に、標準的なクローズドループ方式光干渉角速度計の構成例を示し、その動作について概説する。光源駆動回路1によって制御された光源2から一定強度の光が照射される。この光は光ファイバで伝送され、光カプラ3を経由して光学素子4に入射する。光学素子4は、例えば、ニオブ酸リチウム(LiNbO3)の光学結晶に導波路を形成し、光分岐結合器9、位相変調器7、位相変調器8を集積化した光集積回路を用いる。入射した光は、光分岐結合器9によって二つのルートに分岐され、一方がCW(clockwise)光として光ファイバコイル5の一端に入射し光ファイバコイル5を周回して他端に至り、他方がCCW(counter-clockwise)光として光ファイバコイル5の他端に入射し光ファイバコイル5を周回して一端に至ることになる。なお、この明細書では、「時計回り」と「反時計回り」を図面を正面に見たときの時計回りと反時計回りとして説明する。
【0003】
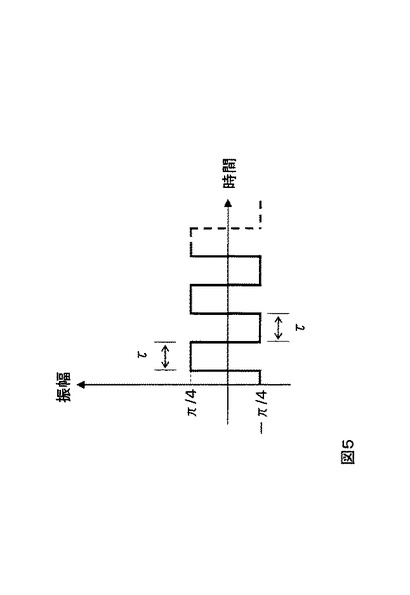
この際、CW光およびCCW光に対して位相変調が行われる。即ち、角速度入力が無い状態でCW光あるいはCCW光が光ファイバコイル5を通過する時間をτとすると、光学素子4の上で二つのルートのうち一方に設けられた位相変調器7は、タイミング信号発生回路50によって発生するタイミング信号を入力として、位相変調駆動回路60が発生したパルス幅をτ、デューティ比を1/2とする矩形波(図5参照)によって、CW光とCCW光に対して+π/4と−π/4の位相変調を交互に行う。
【0004】
図4に示す構成では、CW光は、光ファイバコイル5を周回する前に位相変調器7によって位相変調を受け、CCW光は、光ファイバコイル5を周回した後に、位相変調器7によって位相変調を受ける。従って、同一時点で分岐されたCW光とCCW光とで位相変調を受ける時点がτだけずれているため、CW光とCCW光とでは相対的に+π/2と−π/2の位相差が与えられることになる。
【0005】
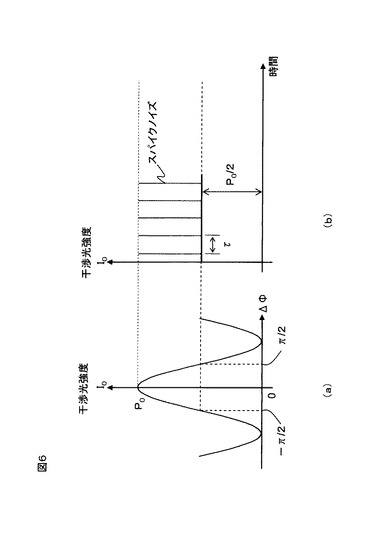
ところで、CW光とCCW光は、光ファイバコイル5を周回した後、光学素子4の光分岐結合器9によって光学的に結合し、干渉する。角速度の入力が無い状態でCW光とCCW光との間にΔΦの位相差があるとすると、CW光とCCW光とが干渉した光の強度(干渉光強度I0)はその最大強度をP0として、式(1)で与えられる(図6(a)で示す実線で描かれた曲線を参照のこと)。
【0006】
【数1】

【0007】
位相変調器7によって、CW光とCCW光に対して相対的に+π/2と−π/2の位相差が与えられると、式(1)に従い、ΔΦ=+π/2の場合でもΔΦ=−π/2の場合でも干渉光強度I0はP0/2となる(図6(b)参照)。なお、図5に示す矩形波の立上がり又は立下りの遷移時に、干渉光強度I0は最大強度P0となる点を通過するため図6(b)、図7(b)に示すスパイクノイズを生じる。
【0008】
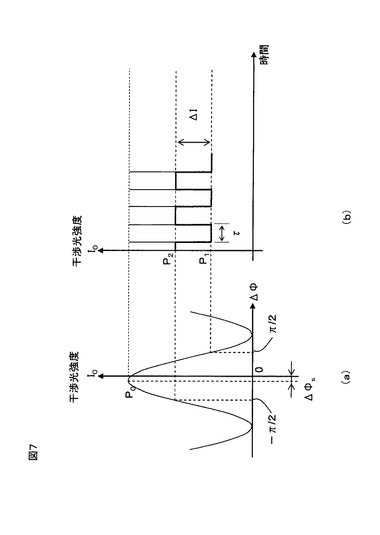
さて、クローズドループ方式光干渉角速度計に時計回りに角速度Ω[rad/s]が加わったとする。正確には光ファイバコイル5に時計回りに入力角速度Ωが加わることであり、この結果、CW光とCCW光とで光路長が異なり、CW光とCCW光との間に入力角速度Ωに基づく位相差が生じる(サニャック効果)。サニャック効果によるCW光とCCW光の位相差(サニャック位相差)をΔΦsとする。時計回りの入力角速度Ωが加わった場合、CCW光の位相に対してCW光の位相はΔΦsだけ進む。このサニャック位相差ΔΦsが加わったときの干渉光強度I0は式(2)で与えられる(図7(a)で示す実線で描かれた曲線を参照のこと。破線で示す曲線は式(1)で与えられるものである。)。
【0009】
【数2】
【0010】
入力角速度Ωが加わった場合も、位相変調器7により+π/2と−π/2の位相差が与えられることは変わらないので、CW光とCCW光とでは、位相変調器7による位相変調ΔΦ=±π/2とサニャック位相差ΔΦsが合わさった+π/2+ΔΦsと−π/2+ΔΦsの位相差が生じる。よって、CW光とCCW光の位相差が+π/2+ΔΦsの場合に干渉光強度I0はP1となり、−π/2+ΔΦsの場合に干渉光強度I0はP2となる(図7(b)参照)。P1は式(3)で与えられ、P2は式(4)で与えられる。また、干渉光強度P1と干渉光強度P2との差である干渉光強度差ΔIは式(5)で定義される。干渉光強度差ΔIの極性により、入力角速度Ωの向き(時計回り又は反時計回り)を知ることができる。
【0011】
【数3】
【0012】
式(5)は、干渉光強度差ΔIを観測すればサニャック位相差ΔΦsを知ることができ
ることを意味する。サニャック位相差ΔΦsは式(6)で与えられる。Rは光ファイバコ
イル5の半径[m]、Lは光ファイバコイル5の光ファイバ長[m]、cは光速[m/s]、
λは光源波長[m]、nは光ファイバコイル5のコア部の屈折率を表す。
【0013】
【数4】
【0014】
クローズドループ方式光干渉角速度計では、干渉光強度差ΔIを0とするように、つまり、サニャック位相差ΔΦsを打ち消すように負帰還制御を行う。このことを図4を参照して説明する。
【0015】
光学素子4の光分岐結合器9によってCW光とCCW光が光学的に結合した干渉光は、光カプラ3に入射して分岐される。分岐されて光カプラ3の出力となった干渉光は、受光器6に入射して光電変換される。光電変換されて生成されたアナログの電気信号は、A/D変換器10に入力され、ディジタル信号に変換される。このディジタル信号はディジタル信号処理装置30に入力される。
【0016】
ディジタル信号処理装置30は、同期検波回路31、積分器32、フィードバック信号発生回路33、ランプ波高値制御部35を含む。A/D変換器10の出力であるディジタル信号は、同期検波回路31に入力される。
【0017】
同期検波回路31は、このディジタル信号に対して同期検波を行い、干渉光強度差ΔIつまりサニャック位相差ΔΦsに対応した信号を出力する。そして、積分器32は、同期検波回路31の出力信号を入力とし、この入力を時間積分した積分値(ディジタル値の累積加算値)を出力する。
【0018】
積分器32の出力は、フィードバック信号発生回路33に入力される。フィードバック信号発生回路33は、時間τにつきフィードバック信号の振幅をΔΦsだけ増大(減少)させ、この振幅が±2mπ(mは整数)を超える時点で2mπだけ振幅を減少(増大)させるフライバック制御を繰り返し、階段状鋸歯状のフィードバック信号を発生する。なお、クローズドループ方式光干渉角速度計では負帰還制御を行うので、フィードバック信号の極性は、サニャック位相差ΔΦsを打ち消すように設定される。フィードバック信号の繰り返し周波数によって入力角速度を検出することが出来るが、このことは後述する。
【0019】
ランプ波高値制御部35は、A/D変換器10の出力とタイミング信号に基づき、±2mπであるしきい値を生成する。ランプ波高値制御部35の詳細は後述する。
【0020】
フィードバック信号発生回路33の出力は、D/A変換器40に入力され、アナログ信号に変換される。このアナログ信号は、光学素子4の上で二つのルートのうち他方に設けられた位相変調器8に入力される。なお、A/D変換器10、同期検波回路31、積分器32、フィードバック信号発生回路33は、タイミング信号発生回路50が発生するタイミング信号によって信号処理の同期が保たれている。
【0021】
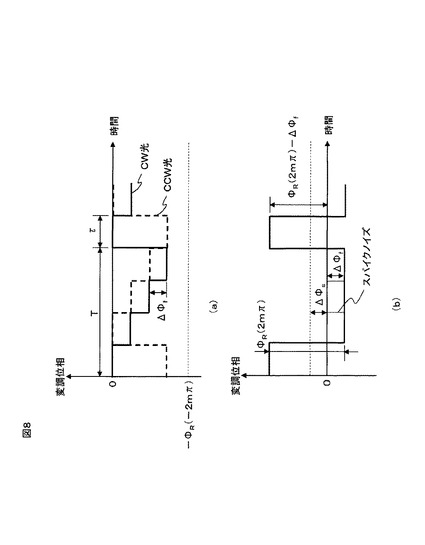
図8に、階段状鋸歯状波とされたフィードバック信号による位相変調を受けたCW光及びCCW光について、変調分の位相(変調位相)と時間との関係を例示する。両光はフライバック制御の階段状鋸歯状波とされたフィードバック信号による位相変調を受けるため、両光の変調位相は階段状鋸歯状波となる。ここで、フィードバック信号は振幅が±2mπを超える時点で2mπだけ振幅を減少(増大)させるフライバック制御を受けているため、CW光とCCW光の各変調位相は周期Tで繰り返す。
【0022】
CW光の変調位相(図8(a)で実線で示されている)と、CCW光の変調位相(図8(a)で破線で示されている)とでは、位相変調を受ける時点がτだけずれているため、時間軸方向にτだけずれが生じる。ここでフィードバック信号である階段状鋸歯状波の階段の幅は時間τに設定されており、CW光の変調位相とCCW光の変調位相との位相差は、図8(b)に示されるとおりとなる。つまり、CW光とCCW光との間に−ΔΦfあるいはΦR(2mπ)−ΔΦfのフィードバック位相差が与えられ、サニャック位相差ΔΦs(図8(a)で破線で示されている)が打ち消される。
【0023】
フィードバック信号の繰り返し周波数による入力角速度の検出について説明する。フィードバック信号の繰り返し周波数f(周期T)と入力角速度Ωとの関係は、周期T=2mπτ/ΔΦsに式(6)を用いることで式(7)で与えられる。
【0024】
【数5】
【0025】
すなわち、フィードバック信号の繰り返し周波数fを計測すれば与えられた入力角速度Ωを知ることができる。そこで、フィードバック信号発生回路33からのフィードバック信号を角速度出力部70に入力し、この角速度出力部70でフィードバック信号の繰り返し周波数fを求め、この繰り返し周波数fに対応した正パルス出力及び負パルス出力を生成する。正パルス出力は例えば時計回りの角速度が入力された場合の出力を示し、負パルス出力は例えば反時計回りの角速度が入力された場合の出力を示す。
【0026】
なお、位相変調器7が、上述の矩形波によってCW光とCCW光に対して+π/4と−π/4の位相変調を交互に行い、CW光とCCW光との間に相対的に+π/2と−π/2の位相差を与える理由は、Δφ=±π/2のとき、式(8)の干渉光強度の変化率が最大となり、サニャック位相差Δφsに対する感度が最大となるからである。
【0027】
【数6】
【0028】
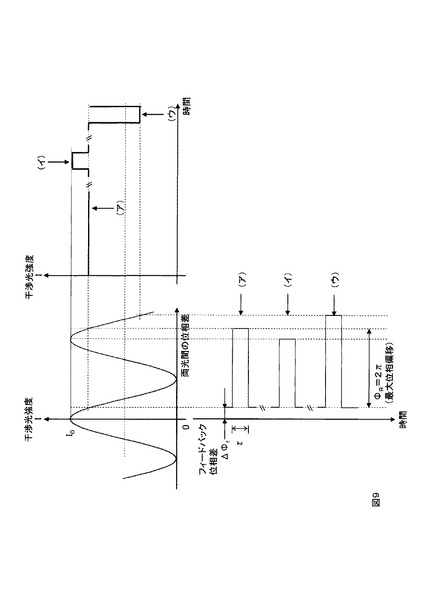
ランプ波高値制御部35は、位相変調器7,8の電気光学係数が温度特性を有していること等の理由によりフィードバック信号の最大位相偏移ΦRが、理想的な2mπの値からずれてしまうことを防止する。フィードバック信号の最大位相偏移ΦRの2mπからのずれは、クローズドループ方式光干渉角速度計のスケールファクタリニアリティの劣化につながる。その理由を図9を参照して説明する。
【0029】
図9は、フィードバック位相差ΔΦfと干渉光強度Iとの関係を示した図である。(ア)で示した期間は最大位相偏移ΦRが丁度2π(rad)(m=1とした場合)の場合であり、フィードバック信号のフライバック制御の前後で干渉光強度に差異は現れない。ところが、フィードバック信号の最大位相偏移ΦRが2πより小さく与えられた場合、(イ)の期間に示されるようにフライバック制御の前後で干渉光強度に差異が現れる。このように干渉光強度に差異が現れると厳密には式(7)が成り立たなくなり、クローズドループ方式光干渉角速度計のスケールファクタリニアリティが劣化する。このことは、フィードバック信号の最大位相偏移ΦRが2πより大きく与えられた(ウ)の期間でも同様である。
【0030】
ランプ波高値制御部35は、同期検波回路36、積分器37、加算器38、2mπ基準値発生器39、で構成される。同期検波回路36は、図9(イ),(ウ)で示した干渉光強度の差異を同期検波することで検出する。積分器37は、同期検波回路36で検出された干渉光強度の差異を積分する。ランプ波高値制御部35は、2mπ基準値発生器39が基準しきい値に積分器37の出力を加算して、最大位相偏移ΦR=2mπになるようにしきい値の値を制御する。しきい値は、フィードバック信号発生回路33に入力される。
【0031】
フィードバック信号発生回路33は、そのしきい値を最大位相偏移ΦRとして階段状鋸歯状のディジタル信号のフィードバック信号を生成するので、フィードバック信号の最大位相偏移は、常時2mπになるように制御される。このようなクローズドループ方式光干渉角速度計として、特許文献1を例示できる。
【0032】
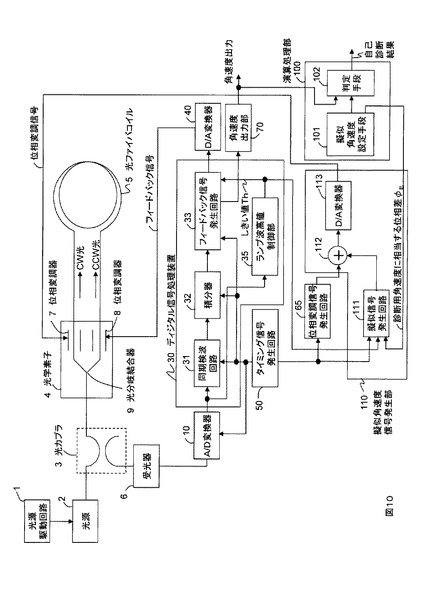
従来から自己診断機能を備えたクローズドループ方式光干渉角速度計が考えられている(特許文献2)。図10に従来の自己診断機能を備えたクローズドループ方式光干渉角速度計の機能構成例を示す。このクローズドループ方式光干渉角速度計は、自己診断機能のために演算処理部100と擬似角速度信号発生部110とを含む。擬似角速度信号発生部110は、位相変調信号発生回路65の出力に、後述する擬似角速度を加算して位相変調信号を生成する。演算処理部100は、診断用角速度と診断用角速度に相当する位相差φEを生成する擬似角速度設定手段101と、角速度出力と診断用角速度とを入力してその差を判定する判定手段102とで構成される。
【0033】
擬似角速度信号発生部110は、擬似信号発生回路111、加算器112、D/A変換器113を含む。位相変調信号発生回路65は、タイミング信号を入力して、パルス幅τ、デューティ比1/2、位相変調量π/4,−π/4のディジタル信号を生成する。
【0034】
擬似信号発生回路111は、タイミング信号と、しきい値と、診断用角速度に相当する位相差φEと、を入力としてしきい値の範囲内で時間τにつき振幅をΦEだけ増大(減少)させた階段状鋸歯状波の擬似角速度信号を生成する。角速度から位相差への変換は式(6)で与えられる。
【0035】
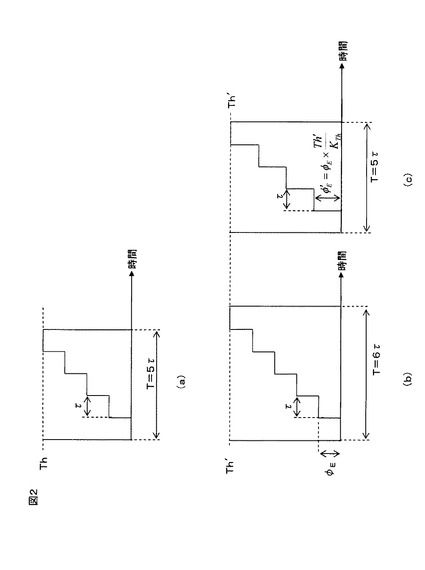
擬似角速度信号は、加算器112で位相変調信号発生回路65の出力と加算され、D/A変換器113を介して光学素子4の位相変調器7に供給される。この様子を図3に示す。図3(a)は位相変調信号発生回路65の出力信号である。図3(b)は擬似角速度信号の一例を示す図である。図3(c)は加算器112の出力波形の一例を示す図である。この結果、クローズドループ方式光干渉角速度計に角速度が印加された場合と等価となる。角速度出力部70が出力する角速度出力を、演算処理部100の判定手段102において、診断用角速度と比較し、その差を判定することで自己診断を行うことが可能になる。
【特許文献1】特開平11−295077号公報
【特許文献2】特開平4−52511号公報
【発明の開示】
【発明が解決しようとする課題】
【0036】
従来の自己診断機能を備えたクローズドループ方式光干渉角速度計は、位相変調器の電気光学係数の温度特性等によってしきい値が変動するにもかかわらず、固定の診断用角速度に相当する位相差φEを用いて擬似角速度信号を生成するので自己診断時の角速度出力の温度特性が悪かった。
【0037】
この発明は、この問題点に鑑みてなされたものであり、温度特性の良い自己診断機能を備えたクローズドループ方式光干渉角速度計を提供することを目的とする。
【課題を解決するための手段】
【0038】
この発明のクローズドループ方式光干渉角速度計は、光源と、光ファイバコイルと、光源からの光を分岐して光ファイバコイルの両端に入射し両回り光とすると共に上記光ファイバコイルを伝播して回帰した当該両回り光を結合干渉させる光分岐結合器と、第1の位相変調器と、光分岐結合器によって結合干渉した干渉光を分岐する光カプラと、光カプラからの干渉光の強度を電気信号に変換する受光器と、受光器からの電気信号をアナログ/ディジタル変換するA/D変換器と、A/D変換器の出力信号を入力としてディジタルフィードバック信号を生成するディジタル信号処理装置と、ディジタルフィードバック信号をディジタル/アナログ変換する第1のD/A変換器と、第1のD/A変換器の出力により位相差を上記両回り光間に与える第2の位相変調器と、タイミング信号から位相変調信号を生成する位相変調発生回路と、ディジタル信号処理装置の出力信号を入力して角速度出力を生成する角速度出力部と、擬似角速度信号発生部と、演算処理部とを具備する。ディジタル信号処理装置は、A/D変換器の出力信号を入力して同期検波する同期検波回路と、同期検波回路の出力を積分する積分器と、積分器の出力を入力して、ディジタルフィードバック信号を生成するフィードバック発生回路と、A/D変換器の出力信号と基準しきい値とからディジタルフィードバック信号のしきい値を生成するランプ波高値制御部と、を備える。演算処理部は、診断用の角速度と角速度に相当する位相差を生成する擬似角速度設定手段と、診断用の角速度と角速度出力部の角速度とを比較して良否を判定する判定手段とを備える。擬似角速度信号発生部は、擬似角速度に相当する位相差と上記しきい値と基準しきい値とを入力として、しきい値を基準しきい値で除したゲイン係数を、擬似角速度に相当する位相差に乗じて診断用位相差として出力するゲイン制御部と、診断用位相差を、しきい値まで積分する階段状鋸歯波状の擬似角速度信号を生成する擬似信号発生回路と、位相変調信号と擬似角速度信号とを加算する加算器と、加算器の出力信号をディジタル/アナログ変換して上記第1の位相変調器に供給する第2のD/A変換器とを備える。
【発明の効果】
【0039】
この発明のクローズドループ方式光干渉角速度計は、ゲイン制御部が、診断用に設定される擬似角速度に相当する位相差を、しきい値を基準しきい値で除したゲイン係数を乗じて診断用位相差を生成する。そして、擬似信号発生回路が、ゲイン係数で調整された診断用位相差をしきい値まで積分して階段状鋸歯状波の擬似角速度信号を生成する。つまり、擬似角速度信号の一段の高さがしきい値の温度変化分を打ち消すように制御されるので、温度特性の良好な自己診断機能を備えたクローズドループ方式光干渉角速度計を実現することができる。
【発明を実施するための最良の形態】
【0040】
以下、この発明の実施の形態を図面を参照して説明する。複数の図面中同一のものには同じ参照符号を付し、説明は繰り返さない。
【実施例1】
【0041】
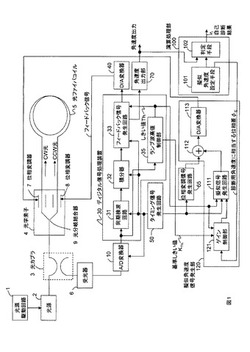
図1にこの発明のクローズドループ方式光干渉角速度計の機能構成例を示す。図1のクローズドループ方式光干渉角速度計は、光源駆動回路1、光源2、光カプラ3、位相変調器7,8、及び光分岐結合器9を含む光学素子4、光ファイバコイル5、受光器6、A/D変換器10、ディジタル信号処理装置30、D/A変換器40、位相変調信号発生回路65、角速度出力部70、演算処理部100、擬似角速度信号発生部120とで構成される。光源駆動回路1から角速度出力部70までは、図4に示した標準的なクローズドループ方式光干渉角速度計と同様に動作する。
【0042】
図1は、自己診断機能のための演算処理部100と、擬似角速度信号発生部120とを含む。位相変調信号発生回路65と演算処理部100は、図10に示した自己診断機能を備えたクローズドループ方式光干渉角速度計と同様に動作する。
【0043】
擬似角速度信号発生部120は、ゲイン制御部121と、擬似信号発生回路111と、加算器112と、D/A変換器113を含む。位相変調信号発生回路65は、タイミング信号を入力して、パルス幅τ、デューティ比1/2、位相変調量π/4、−π/4のディジタル信号を生成する。
【0044】
ゲイン制御部121は、診断用角速度に相当する位相差φEと、しきい値Thと、基準しきい値KThとを入力として、しきい値Thを基準しきい値KThで除したゲイン係数を、擬似角速度に相当する位相差φEに乗じて診断用位相差φE′(式(9))として出力する。
【0045】
【数7】
【0046】
ゲイン制御部121は、位相変調器7,8の電気光学係数が温度特性を有していることの理由により変化するしきい値Thを、基準しきい値KThで除したゲイン係数を求める。そして、擬似角速度に相当する位相差φEにゲイン係数を乗じて診断用位相差φE′を生成する。基準しきい値KThは、ランプ波高値制御部35が生成する2mπ基準値である。
【0047】
擬似信号発生回路111は、タイミング信号と、しきい値と、ゲイン係数が乗じられて生成された診断用位相差φE′と、を入力としてしきい値の範囲内で時間τにつき振幅をφE′だけ増大(減少)させた階段状鋸歯状波の擬似角速度信号を生成する。擬似角速度信号は、加算器112で位相変調信号発生回路65の出力と加算され、D/A変換器113を介して光学素子4の位相変調器7に供給される。
【0048】
この結果、クローズドループ方式に角速度が印加された場合と等価となる。角速度出力部70が出力する角速度出力を、演算処理部100の判定手段102において、診断用角速度と比較し、その差を判定することで自己診断を行う。
【0049】
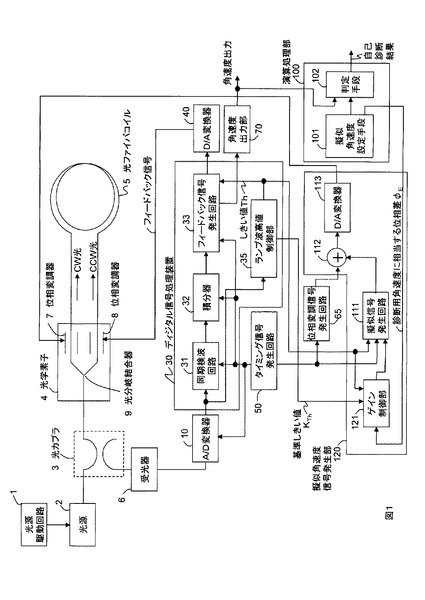
図2(a)は、ある温度における擬似角速度信号波形の一例を示す。しきい値Thの時のフィードバック信号の周期Tは、例えば図2(a)に示すように、T=5τである。ゲイン制御部121を持たない従来の自己診断機能を備えるクローズドループ方式光干渉角速度計において、しきい値Thがしきい値Th′に変化した場合の例を図(b)に示す。しきい値Th′が例えば+1.25倍に変化したとすると、しきい値Th′=1.25×Thの時のフィードバック信号の周期Tは、図2(b)に示すようにT=6τに変化してしまう。
【0050】
このフィードバック信号の周期Tの変化は、角速度出力の変化となる。このように、ゲイン制御部121を持たない従来の自己診断機能を備えるクローズドループ方式光干渉角速度計は、自己診断時の角速度出力の温度特性が悪かった。
【0051】
図2(c)に実施例1の擬似角速度信号波形の一例を示す。しきい値Thが、図2(b)と同様に+1.25倍に変化して、しきい値Th′=1.25×Thになった場合を示している。実施例1では、しきい値ThがTh′に変化しても、その分、診断用角速度の相当する位相差φEがゲイン係数(Th′/KTh)が乗じられて補正されるので、フィードバック信号の周期Tは一定に保たれる。この結果、実施例1の構成によれば、温度変化の影響を受けずにクローズドループ方式光干渉角速度計の自己診断を行うことが可能になる。
【0052】
図1はディジタル方式の自己診断機能を備えるクローズドループ方式光干渉角速度計であるが、図1からA/D変換器10、D/A変換器40,113を取り除いたような、アナログ方式の自己診断機能を備えたクローズドループ方式光干渉角速度計であってもよい。
【図面の簡単な説明】
【0053】
【図1】この発明のクローズドループ方式光干渉角速度計の機能構成例を示す図。
【図2】しきい値Thと擬似角速度信号の関係を示す図であり、(a)はしきい値Thの時の擬似角速度信号の波形を示す図、(b)はゲイン制御部121が無い場合におけるしきい値Th′の時の擬似角速度信号の波形を示す図、(c)はゲイン制御部121を備えた場合におけるしきい値Th′の時の擬似角速度信号の波形を示す図である。
【図3】(a)は位相変調信号発生回路65の出力波形の例を示す図、(b)は擬似信号発生回路111の出力波形の例を示す図、(c)は加算器112の出力波形の例を示す図である。
【図4】従来のクローズドループ方式光干渉角速度計の機能構成例を示す図。
【図5】位相変調駆動回路60が発生する+π/4と−π/4の位相変調信号を示す図。
【図6】光分岐結合器9で発生する干渉光強度を示す図。
【図7】サニャック位相差ΔΦsが加わったときの干渉光強度I0を示す図。
【図8】フィードバック信号と変調位相の関係を示す図であり、(a)は位相変調を受けたCW光およびCCW光を示す図であり、(b)は両光の位相差を示す図である。
【図9】階段状鋸歯状波の最大位相偏移ΦRの2mπからのずれと、干渉光強度の関係を示す図。
【図10】従来の自己診断機能を備えたクローズドループ方式光干渉角速度計の機能構成例を示す図。
【技術分野】
【0001】
この発明は、自己診断機能を備えたクローズドループ方式光干渉角速度計に関する。
【背景技術】
【0002】
図4に、標準的なクローズドループ方式光干渉角速度計の構成例を示し、その動作について概説する。光源駆動回路1によって制御された光源2から一定強度の光が照射される。この光は光ファイバで伝送され、光カプラ3を経由して光学素子4に入射する。光学素子4は、例えば、ニオブ酸リチウム(LiNbO3)の光学結晶に導波路を形成し、光分岐結合器9、位相変調器7、位相変調器8を集積化した光集積回路を用いる。入射した光は、光分岐結合器9によって二つのルートに分岐され、一方がCW(clockwise)光として光ファイバコイル5の一端に入射し光ファイバコイル5を周回して他端に至り、他方がCCW(counter-clockwise)光として光ファイバコイル5の他端に入射し光ファイバコイル5を周回して一端に至ることになる。なお、この明細書では、「時計回り」と「反時計回り」を図面を正面に見たときの時計回りと反時計回りとして説明する。
【0003】
この際、CW光およびCCW光に対して位相変調が行われる。即ち、角速度入力が無い状態でCW光あるいはCCW光が光ファイバコイル5を通過する時間をτとすると、光学素子4の上で二つのルートのうち一方に設けられた位相変調器7は、タイミング信号発生回路50によって発生するタイミング信号を入力として、位相変調駆動回路60が発生したパルス幅をτ、デューティ比を1/2とする矩形波(図5参照)によって、CW光とCCW光に対して+π/4と−π/4の位相変調を交互に行う。
【0004】
図4に示す構成では、CW光は、光ファイバコイル5を周回する前に位相変調器7によって位相変調を受け、CCW光は、光ファイバコイル5を周回した後に、位相変調器7によって位相変調を受ける。従って、同一時点で分岐されたCW光とCCW光とで位相変調を受ける時点がτだけずれているため、CW光とCCW光とでは相対的に+π/2と−π/2の位相差が与えられることになる。
【0005】
ところで、CW光とCCW光は、光ファイバコイル5を周回した後、光学素子4の光分岐結合器9によって光学的に結合し、干渉する。角速度の入力が無い状態でCW光とCCW光との間にΔΦの位相差があるとすると、CW光とCCW光とが干渉した光の強度(干渉光強度I0)はその最大強度をP0として、式(1)で与えられる(図6(a)で示す実線で描かれた曲線を参照のこと)。
【0006】
【数1】
【0007】
位相変調器7によって、CW光とCCW光に対して相対的に+π/2と−π/2の位相差が与えられると、式(1)に従い、ΔΦ=+π/2の場合でもΔΦ=−π/2の場合でも干渉光強度I0はP0/2となる(図6(b)参照)。なお、図5に示す矩形波の立上がり又は立下りの遷移時に、干渉光強度I0は最大強度P0となる点を通過するため図6(b)、図7(b)に示すスパイクノイズを生じる。
【0008】
さて、クローズドループ方式光干渉角速度計に時計回りに角速度Ω[rad/s]が加わったとする。正確には光ファイバコイル5に時計回りに入力角速度Ωが加わることであり、この結果、CW光とCCW光とで光路長が異なり、CW光とCCW光との間に入力角速度Ωに基づく位相差が生じる(サニャック効果)。サニャック効果によるCW光とCCW光の位相差(サニャック位相差)をΔΦsとする。時計回りの入力角速度Ωが加わった場合、CCW光の位相に対してCW光の位相はΔΦsだけ進む。このサニャック位相差ΔΦsが加わったときの干渉光強度I0は式(2)で与えられる(図7(a)で示す実線で描かれた曲線を参照のこと。破線で示す曲線は式(1)で与えられるものである。)。
【0009】
【数2】
【0010】
入力角速度Ωが加わった場合も、位相変調器7により+π/2と−π/2の位相差が与えられることは変わらないので、CW光とCCW光とでは、位相変調器7による位相変調ΔΦ=±π/2とサニャック位相差ΔΦsが合わさった+π/2+ΔΦsと−π/2+ΔΦsの位相差が生じる。よって、CW光とCCW光の位相差が+π/2+ΔΦsの場合に干渉光強度I0はP1となり、−π/2+ΔΦsの場合に干渉光強度I0はP2となる(図7(b)参照)。P1は式(3)で与えられ、P2は式(4)で与えられる。また、干渉光強度P1と干渉光強度P2との差である干渉光強度差ΔIは式(5)で定義される。干渉光強度差ΔIの極性により、入力角速度Ωの向き(時計回り又は反時計回り)を知ることができる。
【0011】
【数3】
【0012】
式(5)は、干渉光強度差ΔIを観測すればサニャック位相差ΔΦsを知ることができ
ることを意味する。サニャック位相差ΔΦsは式(6)で与えられる。Rは光ファイバコ
イル5の半径[m]、Lは光ファイバコイル5の光ファイバ長[m]、cは光速[m/s]、
λは光源波長[m]、nは光ファイバコイル5のコア部の屈折率を表す。
【0013】
【数4】
【0014】
クローズドループ方式光干渉角速度計では、干渉光強度差ΔIを0とするように、つまり、サニャック位相差ΔΦsを打ち消すように負帰還制御を行う。このことを図4を参照して説明する。
【0015】
光学素子4の光分岐結合器9によってCW光とCCW光が光学的に結合した干渉光は、光カプラ3に入射して分岐される。分岐されて光カプラ3の出力となった干渉光は、受光器6に入射して光電変換される。光電変換されて生成されたアナログの電気信号は、A/D変換器10に入力され、ディジタル信号に変換される。このディジタル信号はディジタル信号処理装置30に入力される。
【0016】
ディジタル信号処理装置30は、同期検波回路31、積分器32、フィードバック信号発生回路33、ランプ波高値制御部35を含む。A/D変換器10の出力であるディジタル信号は、同期検波回路31に入力される。
【0017】
同期検波回路31は、このディジタル信号に対して同期検波を行い、干渉光強度差ΔIつまりサニャック位相差ΔΦsに対応した信号を出力する。そして、積分器32は、同期検波回路31の出力信号を入力とし、この入力を時間積分した積分値(ディジタル値の累積加算値)を出力する。
【0018】
積分器32の出力は、フィードバック信号発生回路33に入力される。フィードバック信号発生回路33は、時間τにつきフィードバック信号の振幅をΔΦsだけ増大(減少)させ、この振幅が±2mπ(mは整数)を超える時点で2mπだけ振幅を減少(増大)させるフライバック制御を繰り返し、階段状鋸歯状のフィードバック信号を発生する。なお、クローズドループ方式光干渉角速度計では負帰還制御を行うので、フィードバック信号の極性は、サニャック位相差ΔΦsを打ち消すように設定される。フィードバック信号の繰り返し周波数によって入力角速度を検出することが出来るが、このことは後述する。
【0019】
ランプ波高値制御部35は、A/D変換器10の出力とタイミング信号に基づき、±2mπであるしきい値を生成する。ランプ波高値制御部35の詳細は後述する。
【0020】
フィードバック信号発生回路33の出力は、D/A変換器40に入力され、アナログ信号に変換される。このアナログ信号は、光学素子4の上で二つのルートのうち他方に設けられた位相変調器8に入力される。なお、A/D変換器10、同期検波回路31、積分器32、フィードバック信号発生回路33は、タイミング信号発生回路50が発生するタイミング信号によって信号処理の同期が保たれている。
【0021】
図8に、階段状鋸歯状波とされたフィードバック信号による位相変調を受けたCW光及びCCW光について、変調分の位相(変調位相)と時間との関係を例示する。両光はフライバック制御の階段状鋸歯状波とされたフィードバック信号による位相変調を受けるため、両光の変調位相は階段状鋸歯状波となる。ここで、フィードバック信号は振幅が±2mπを超える時点で2mπだけ振幅を減少(増大)させるフライバック制御を受けているため、CW光とCCW光の各変調位相は周期Tで繰り返す。
【0022】
CW光の変調位相(図8(a)で実線で示されている)と、CCW光の変調位相(図8(a)で破線で示されている)とでは、位相変調を受ける時点がτだけずれているため、時間軸方向にτだけずれが生じる。ここでフィードバック信号である階段状鋸歯状波の階段の幅は時間τに設定されており、CW光の変調位相とCCW光の変調位相との位相差は、図8(b)に示されるとおりとなる。つまり、CW光とCCW光との間に−ΔΦfあるいはΦR(2mπ)−ΔΦfのフィードバック位相差が与えられ、サニャック位相差ΔΦs(図8(a)で破線で示されている)が打ち消される。
【0023】
フィードバック信号の繰り返し周波数による入力角速度の検出について説明する。フィードバック信号の繰り返し周波数f(周期T)と入力角速度Ωとの関係は、周期T=2mπτ/ΔΦsに式(6)を用いることで式(7)で与えられる。
【0024】
【数5】
【0025】
すなわち、フィードバック信号の繰り返し周波数fを計測すれば与えられた入力角速度Ωを知ることができる。そこで、フィードバック信号発生回路33からのフィードバック信号を角速度出力部70に入力し、この角速度出力部70でフィードバック信号の繰り返し周波数fを求め、この繰り返し周波数fに対応した正パルス出力及び負パルス出力を生成する。正パルス出力は例えば時計回りの角速度が入力された場合の出力を示し、負パルス出力は例えば反時計回りの角速度が入力された場合の出力を示す。
【0026】
なお、位相変調器7が、上述の矩形波によってCW光とCCW光に対して+π/4と−π/4の位相変調を交互に行い、CW光とCCW光との間に相対的に+π/2と−π/2の位相差を与える理由は、Δφ=±π/2のとき、式(8)の干渉光強度の変化率が最大となり、サニャック位相差Δφsに対する感度が最大となるからである。
【0027】
【数6】
【0028】
ランプ波高値制御部35は、位相変調器7,8の電気光学係数が温度特性を有していること等の理由によりフィードバック信号の最大位相偏移ΦRが、理想的な2mπの値からずれてしまうことを防止する。フィードバック信号の最大位相偏移ΦRの2mπからのずれは、クローズドループ方式光干渉角速度計のスケールファクタリニアリティの劣化につながる。その理由を図9を参照して説明する。
【0029】
図9は、フィードバック位相差ΔΦfと干渉光強度Iとの関係を示した図である。(ア)で示した期間は最大位相偏移ΦRが丁度2π(rad)(m=1とした場合)の場合であり、フィードバック信号のフライバック制御の前後で干渉光強度に差異は現れない。ところが、フィードバック信号の最大位相偏移ΦRが2πより小さく与えられた場合、(イ)の期間に示されるようにフライバック制御の前後で干渉光強度に差異が現れる。このように干渉光強度に差異が現れると厳密には式(7)が成り立たなくなり、クローズドループ方式光干渉角速度計のスケールファクタリニアリティが劣化する。このことは、フィードバック信号の最大位相偏移ΦRが2πより大きく与えられた(ウ)の期間でも同様である。
【0030】
ランプ波高値制御部35は、同期検波回路36、積分器37、加算器38、2mπ基準値発生器39、で構成される。同期検波回路36は、図9(イ),(ウ)で示した干渉光強度の差異を同期検波することで検出する。積分器37は、同期検波回路36で検出された干渉光強度の差異を積分する。ランプ波高値制御部35は、2mπ基準値発生器39が基準しきい値に積分器37の出力を加算して、最大位相偏移ΦR=2mπになるようにしきい値の値を制御する。しきい値は、フィードバック信号発生回路33に入力される。
【0031】
フィードバック信号発生回路33は、そのしきい値を最大位相偏移ΦRとして階段状鋸歯状のディジタル信号のフィードバック信号を生成するので、フィードバック信号の最大位相偏移は、常時2mπになるように制御される。このようなクローズドループ方式光干渉角速度計として、特許文献1を例示できる。
【0032】
従来から自己診断機能を備えたクローズドループ方式光干渉角速度計が考えられている(特許文献2)。図10に従来の自己診断機能を備えたクローズドループ方式光干渉角速度計の機能構成例を示す。このクローズドループ方式光干渉角速度計は、自己診断機能のために演算処理部100と擬似角速度信号発生部110とを含む。擬似角速度信号発生部110は、位相変調信号発生回路65の出力に、後述する擬似角速度を加算して位相変調信号を生成する。演算処理部100は、診断用角速度と診断用角速度に相当する位相差φEを生成する擬似角速度設定手段101と、角速度出力と診断用角速度とを入力してその差を判定する判定手段102とで構成される。
【0033】
擬似角速度信号発生部110は、擬似信号発生回路111、加算器112、D/A変換器113を含む。位相変調信号発生回路65は、タイミング信号を入力して、パルス幅τ、デューティ比1/2、位相変調量π/4,−π/4のディジタル信号を生成する。
【0034】
擬似信号発生回路111は、タイミング信号と、しきい値と、診断用角速度に相当する位相差φEと、を入力としてしきい値の範囲内で時間τにつき振幅をΦEだけ増大(減少)させた階段状鋸歯状波の擬似角速度信号を生成する。角速度から位相差への変換は式(6)で与えられる。
【0035】
擬似角速度信号は、加算器112で位相変調信号発生回路65の出力と加算され、D/A変換器113を介して光学素子4の位相変調器7に供給される。この様子を図3に示す。図3(a)は位相変調信号発生回路65の出力信号である。図3(b)は擬似角速度信号の一例を示す図である。図3(c)は加算器112の出力波形の一例を示す図である。この結果、クローズドループ方式光干渉角速度計に角速度が印加された場合と等価となる。角速度出力部70が出力する角速度出力を、演算処理部100の判定手段102において、診断用角速度と比較し、その差を判定することで自己診断を行うことが可能になる。
【特許文献1】特開平11−295077号公報
【特許文献2】特開平4−52511号公報
【発明の開示】
【発明が解決しようとする課題】
【0036】
従来の自己診断機能を備えたクローズドループ方式光干渉角速度計は、位相変調器の電気光学係数の温度特性等によってしきい値が変動するにもかかわらず、固定の診断用角速度に相当する位相差φEを用いて擬似角速度信号を生成するので自己診断時の角速度出力の温度特性が悪かった。
【0037】
この発明は、この問題点に鑑みてなされたものであり、温度特性の良い自己診断機能を備えたクローズドループ方式光干渉角速度計を提供することを目的とする。
【課題を解決するための手段】
【0038】
この発明のクローズドループ方式光干渉角速度計は、光源と、光ファイバコイルと、光源からの光を分岐して光ファイバコイルの両端に入射し両回り光とすると共に上記光ファイバコイルを伝播して回帰した当該両回り光を結合干渉させる光分岐結合器と、第1の位相変調器と、光分岐結合器によって結合干渉した干渉光を分岐する光カプラと、光カプラからの干渉光の強度を電気信号に変換する受光器と、受光器からの電気信号をアナログ/ディジタル変換するA/D変換器と、A/D変換器の出力信号を入力としてディジタルフィードバック信号を生成するディジタル信号処理装置と、ディジタルフィードバック信号をディジタル/アナログ変換する第1のD/A変換器と、第1のD/A変換器の出力により位相差を上記両回り光間に与える第2の位相変調器と、タイミング信号から位相変調信号を生成する位相変調発生回路と、ディジタル信号処理装置の出力信号を入力して角速度出力を生成する角速度出力部と、擬似角速度信号発生部と、演算処理部とを具備する。ディジタル信号処理装置は、A/D変換器の出力信号を入力して同期検波する同期検波回路と、同期検波回路の出力を積分する積分器と、積分器の出力を入力して、ディジタルフィードバック信号を生成するフィードバック発生回路と、A/D変換器の出力信号と基準しきい値とからディジタルフィードバック信号のしきい値を生成するランプ波高値制御部と、を備える。演算処理部は、診断用の角速度と角速度に相当する位相差を生成する擬似角速度設定手段と、診断用の角速度と角速度出力部の角速度とを比較して良否を判定する判定手段とを備える。擬似角速度信号発生部は、擬似角速度に相当する位相差と上記しきい値と基準しきい値とを入力として、しきい値を基準しきい値で除したゲイン係数を、擬似角速度に相当する位相差に乗じて診断用位相差として出力するゲイン制御部と、診断用位相差を、しきい値まで積分する階段状鋸歯波状の擬似角速度信号を生成する擬似信号発生回路と、位相変調信号と擬似角速度信号とを加算する加算器と、加算器の出力信号をディジタル/アナログ変換して上記第1の位相変調器に供給する第2のD/A変換器とを備える。
【発明の効果】
【0039】
この発明のクローズドループ方式光干渉角速度計は、ゲイン制御部が、診断用に設定される擬似角速度に相当する位相差を、しきい値を基準しきい値で除したゲイン係数を乗じて診断用位相差を生成する。そして、擬似信号発生回路が、ゲイン係数で調整された診断用位相差をしきい値まで積分して階段状鋸歯状波の擬似角速度信号を生成する。つまり、擬似角速度信号の一段の高さがしきい値の温度変化分を打ち消すように制御されるので、温度特性の良好な自己診断機能を備えたクローズドループ方式光干渉角速度計を実現することができる。
【発明を実施するための最良の形態】
【0040】
以下、この発明の実施の形態を図面を参照して説明する。複数の図面中同一のものには同じ参照符号を付し、説明は繰り返さない。
【実施例1】
【0041】
図1にこの発明のクローズドループ方式光干渉角速度計の機能構成例を示す。図1のクローズドループ方式光干渉角速度計は、光源駆動回路1、光源2、光カプラ3、位相変調器7,8、及び光分岐結合器9を含む光学素子4、光ファイバコイル5、受光器6、A/D変換器10、ディジタル信号処理装置30、D/A変換器40、位相変調信号発生回路65、角速度出力部70、演算処理部100、擬似角速度信号発生部120とで構成される。光源駆動回路1から角速度出力部70までは、図4に示した標準的なクローズドループ方式光干渉角速度計と同様に動作する。
【0042】
図1は、自己診断機能のための演算処理部100と、擬似角速度信号発生部120とを含む。位相変調信号発生回路65と演算処理部100は、図10に示した自己診断機能を備えたクローズドループ方式光干渉角速度計と同様に動作する。
【0043】
擬似角速度信号発生部120は、ゲイン制御部121と、擬似信号発生回路111と、加算器112と、D/A変換器113を含む。位相変調信号発生回路65は、タイミング信号を入力して、パルス幅τ、デューティ比1/2、位相変調量π/4、−π/4のディジタル信号を生成する。
【0044】
ゲイン制御部121は、診断用角速度に相当する位相差φEと、しきい値Thと、基準しきい値KThとを入力として、しきい値Thを基準しきい値KThで除したゲイン係数を、擬似角速度に相当する位相差φEに乗じて診断用位相差φE′(式(9))として出力する。
【0045】
【数7】
【0046】
ゲイン制御部121は、位相変調器7,8の電気光学係数が温度特性を有していることの理由により変化するしきい値Thを、基準しきい値KThで除したゲイン係数を求める。そして、擬似角速度に相当する位相差φEにゲイン係数を乗じて診断用位相差φE′を生成する。基準しきい値KThは、ランプ波高値制御部35が生成する2mπ基準値である。
【0047】
擬似信号発生回路111は、タイミング信号と、しきい値と、ゲイン係数が乗じられて生成された診断用位相差φE′と、を入力としてしきい値の範囲内で時間τにつき振幅をφE′だけ増大(減少)させた階段状鋸歯状波の擬似角速度信号を生成する。擬似角速度信号は、加算器112で位相変調信号発生回路65の出力と加算され、D/A変換器113を介して光学素子4の位相変調器7に供給される。
【0048】
この結果、クローズドループ方式に角速度が印加された場合と等価となる。角速度出力部70が出力する角速度出力を、演算処理部100の判定手段102において、診断用角速度と比較し、その差を判定することで自己診断を行う。
【0049】
図2(a)は、ある温度における擬似角速度信号波形の一例を示す。しきい値Thの時のフィードバック信号の周期Tは、例えば図2(a)に示すように、T=5τである。ゲイン制御部121を持たない従来の自己診断機能を備えるクローズドループ方式光干渉角速度計において、しきい値Thがしきい値Th′に変化した場合の例を図(b)に示す。しきい値Th′が例えば+1.25倍に変化したとすると、しきい値Th′=1.25×Thの時のフィードバック信号の周期Tは、図2(b)に示すようにT=6τに変化してしまう。
【0050】
このフィードバック信号の周期Tの変化は、角速度出力の変化となる。このように、ゲイン制御部121を持たない従来の自己診断機能を備えるクローズドループ方式光干渉角速度計は、自己診断時の角速度出力の温度特性が悪かった。
【0051】
図2(c)に実施例1の擬似角速度信号波形の一例を示す。しきい値Thが、図2(b)と同様に+1.25倍に変化して、しきい値Th′=1.25×Thになった場合を示している。実施例1では、しきい値ThがTh′に変化しても、その分、診断用角速度の相当する位相差φEがゲイン係数(Th′/KTh)が乗じられて補正されるので、フィードバック信号の周期Tは一定に保たれる。この結果、実施例1の構成によれば、温度変化の影響を受けずにクローズドループ方式光干渉角速度計の自己診断を行うことが可能になる。
【0052】
図1はディジタル方式の自己診断機能を備えるクローズドループ方式光干渉角速度計であるが、図1からA/D変換器10、D/A変換器40,113を取り除いたような、アナログ方式の自己診断機能を備えたクローズドループ方式光干渉角速度計であってもよい。
【図面の簡単な説明】
【0053】
【図1】この発明のクローズドループ方式光干渉角速度計の機能構成例を示す図。
【図2】しきい値Thと擬似角速度信号の関係を示す図であり、(a)はしきい値Thの時の擬似角速度信号の波形を示す図、(b)はゲイン制御部121が無い場合におけるしきい値Th′の時の擬似角速度信号の波形を示す図、(c)はゲイン制御部121を備えた場合におけるしきい値Th′の時の擬似角速度信号の波形を示す図である。
【図3】(a)は位相変調信号発生回路65の出力波形の例を示す図、(b)は擬似信号発生回路111の出力波形の例を示す図、(c)は加算器112の出力波形の例を示す図である。
【図4】従来のクローズドループ方式光干渉角速度計の機能構成例を示す図。
【図5】位相変調駆動回路60が発生する+π/4と−π/4の位相変調信号を示す図。
【図6】光分岐結合器9で発生する干渉光強度を示す図。
【図7】サニャック位相差ΔΦsが加わったときの干渉光強度I0を示す図。
【図8】フィードバック信号と変調位相の関係を示す図であり、(a)は位相変調を受けたCW光およびCCW光を示す図であり、(b)は両光の位相差を示す図である。
【図9】階段状鋸歯状波の最大位相偏移ΦRの2mπからのずれと、干渉光強度の関係を示す図。
【図10】従来の自己診断機能を備えたクローズドループ方式光干渉角速度計の機能構成例を示す図。
【特許請求の範囲】
【請求項1】
サニャック効果に基づく光の位相変化をゼロとするようにフィードバック制御を行うことで角速度を検出するクローズドループ方式光干渉角速度計において、
光源と、
光ファイバコイルと、
上記光源からの光を分岐して上記光ファイバコイルの両端に入射し両回り光とすると共に上記光ファイバコイルを伝播して回帰した当該両回り光を結合干渉させる光分岐結合器と、
第1の位相変調器と、
上記光分岐結合器によって結合干渉した干渉光を分岐する光カプラと、
上記光カプラからの干渉光の強度を電気信号に変換する受光器と、
上記受光器からの電気信号をアナログ/ディジタル変換するA/D変換器と、
上記A/D変換器の出力信号を入力としてディジタルフィードバック信号を生成するディジタル信号処理装置と、
上記ディジタルフィードバック信号をディジタル/アナログ変換する第1のD/A変換器と、
上記第1のD/A変換器の出力により位相差を上記両回り光間に与える第2の位相変調器と、
タイミング信号から位相変調信号を生成する位相変調発生回路と、
上記ディジタル信号処理装置の出力信号を入力して角速度出力を生成する角速度出力部と、
擬似角速度信号発生部と、
演算処理部と、
を具備し、
上記ディジタル信号処理装置は、
上記A/D変換器の出力信号を入力して同期検波する同期検波回路と、
上記同期検波回路の出力を積分する積分器と、
上記積分器の出力を入力して、ディジタルフィードバック信号を生成するフィードバック発生回路と、
基準しきい値を備え、上記A/D変換器の出力信号と上記基準しきい値とより、上記ディジタルフィードバック信号のしきい値を生成するランプ波高値制御部とを備え、
上記演算処理部は、
診断用の角速度と上記角速度に相当する位相差を生成する擬似角速度設定手段と、
上記診断用の角速度と上記角速度出力部の角速度出力とを比較して良否を判定する判定手段とを備え、
上記擬似角速度信号発生部は、
上記擬似角速度に相当する位相差と上記しきい値と基準しきい値とを入力として、
上記しきい値を上記基準しきい値で除したゲイン係数を、上記擬似角速度に相当する位相差に乗じて診断用位相差として出力するゲイン制御部と、
上記診断用位相差を、上記しきい値まで積分する階段状鋸歯波状の擬似角速度信号を生成する擬似信号発生回路と、
上記位相変調信号と上記擬似角速度信号とを加算する加算器と、
上記加算器の出力信号をディジタル/アナログ変換して上記第1の位相変調器に供給する第2のD/A変換器と、
を備えることを特徴とするクローズドループ方式光干渉角速度計。
【請求項1】
サニャック効果に基づく光の位相変化をゼロとするようにフィードバック制御を行うことで角速度を検出するクローズドループ方式光干渉角速度計において、
光源と、
光ファイバコイルと、
上記光源からの光を分岐して上記光ファイバコイルの両端に入射し両回り光とすると共に上記光ファイバコイルを伝播して回帰した当該両回り光を結合干渉させる光分岐結合器と、
第1の位相変調器と、
上記光分岐結合器によって結合干渉した干渉光を分岐する光カプラと、
上記光カプラからの干渉光の強度を電気信号に変換する受光器と、
上記受光器からの電気信号をアナログ/ディジタル変換するA/D変換器と、
上記A/D変換器の出力信号を入力としてディジタルフィードバック信号を生成するディジタル信号処理装置と、
上記ディジタルフィードバック信号をディジタル/アナログ変換する第1のD/A変換器と、
上記第1のD/A変換器の出力により位相差を上記両回り光間に与える第2の位相変調器と、
タイミング信号から位相変調信号を生成する位相変調発生回路と、
上記ディジタル信号処理装置の出力信号を入力して角速度出力を生成する角速度出力部と、
擬似角速度信号発生部と、
演算処理部と、
を具備し、
上記ディジタル信号処理装置は、
上記A/D変換器の出力信号を入力して同期検波する同期検波回路と、
上記同期検波回路の出力を積分する積分器と、
上記積分器の出力を入力して、ディジタルフィードバック信号を生成するフィードバック発生回路と、
基準しきい値を備え、上記A/D変換器の出力信号と上記基準しきい値とより、上記ディジタルフィードバック信号のしきい値を生成するランプ波高値制御部とを備え、
上記演算処理部は、
診断用の角速度と上記角速度に相当する位相差を生成する擬似角速度設定手段と、
上記診断用の角速度と上記角速度出力部の角速度出力とを比較して良否を判定する判定手段とを備え、
上記擬似角速度信号発生部は、
上記擬似角速度に相当する位相差と上記しきい値と基準しきい値とを入力として、
上記しきい値を上記基準しきい値で除したゲイン係数を、上記擬似角速度に相当する位相差に乗じて診断用位相差として出力するゲイン制御部と、
上記診断用位相差を、上記しきい値まで積分する階段状鋸歯波状の擬似角速度信号を生成する擬似信号発生回路と、
上記位相変調信号と上記擬似角速度信号とを加算する加算器と、
上記加算器の出力信号をディジタル/アナログ変換して上記第1の位相変調器に供給する第2のD/A変換器と、
を備えることを特徴とするクローズドループ方式光干渉角速度計。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−145248(P2010−145248A)
【公開日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願番号】特願2008−322812(P2008−322812)
【出願日】平成20年12月18日(2008.12.18)
【出願人】(000231073)日本航空電子工業株式会社 (1,081)
【Fターム(参考)】
【公開日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願日】平成20年12月18日(2008.12.18)
【出願人】(000231073)日本航空電子工業株式会社 (1,081)
【Fターム(参考)】
[ Back to top ]