
クローラ装置およびクローラロボット
【課題】砂地や泥地等の軟弱地盤での走行性を高めたクローラ装置およびクローラロボットを提供する。
【解決手段】クローラ装置2は、前後方向に延びる車輪支持体10と、車輪支持体の前部および後部に回転可能に支持された車輪20と、前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルト30とを備えている。車輪は、剛性の車輪本体21と、この車輪本体の外周に固着された弾性材料からなる外装体22とを有している。外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部22x,22yが形成され、これら凸部間に、外装体の幅方向に貫通する排出溝25が形成されている。外装体の凸部の頂面とクローラベルトの内周面が、摩擦力を伴って面接触している。車輪支持体には、クローラベルトの両側縁を係止する規制部材41〜44が設けられ、クローラベルトの車輪に対する幅方向の位置ずれを規制するようになっている。
【解決手段】クローラ装置2は、前後方向に延びる車輪支持体10と、車輪支持体の前部および後部に回転可能に支持された車輪20と、前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルト30とを備えている。車輪は、剛性の車輪本体21と、この車輪本体の外周に固着された弾性材料からなる外装体22とを有している。外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部22x,22yが形成され、これら凸部間に、外装体の幅方向に貫通する排出溝25が形成されている。外装体の凸部の頂面とクローラベルトの内周面が、摩擦力を伴って面接触している。車輪支持体には、クローラベルトの両側縁を係止する規制部材41〜44が設けられ、クローラベルトの車輪に対する幅方向の位置ずれを規制するようになっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底等の軟弱地盤を走行するのに適した人が搭乗しないクローラ装置およびクローラロボットに関する。
【背景技術】
【0002】
海底探査等に用いられるロボットは、海底の軟弱地盤(砂地や泥濘地等)を走行することが多い。このようなロボットとしては、車輪式ロボットよりクローラ式ロボットの方が適している。車輪式ロボットでは車輪が軟弱地盤を深く掘って走行不能になることが多いのに比べて、クローラ式ロボットでは接地圧が小さいため、このような不都合が生じにくいからである。
【0003】
上記クローラ式ロボットにおける左右のクローラ装置は、前後の車輪間に無端状のクローラベルトを掛け渡すことにより構成されている。
車輪とクローラベルトはトルク伝達のために噛み合うようになっており、例えば特許文献1のクローラ装置では、車輪の周面に周方向に等間隔をおいて突起が設けられ、クローラベルトにはこれら突起に係合する係合穴が形成されている。
【0004】
特許文献1のロボットを海底探査に用いて軟弱地盤を走行させると、クローラベルトと車輪との間に砂や泥が入り込み、これにより上記突起と係合穴の係合が外れてクローラベルトが車輪から脱落したり、クローラベルトを傷めて破断に導いたり、クローラベルトに過剰なテンションが作用する不都合が生じる。
【0005】
特許文献2,3に開示されたクローラ装置のように、クローラベルトと車輪とが摩擦力だけで係合する構成を採用すれば、上記特許文献1の不都合は基本的には解消されるはずである。以下、特許文献2,3について詳述する。
【0006】
特許文献2のクローラ装置では、車輪の外周の幅方向中央に環状の溝が形成されており、その両側が受面として提供されている。各受面には、剛性の摩擦係合要素が周方向に間隔をおいて形成されている。他方、クローラベルトはゴム製であり、その内周の中央に間隔をおいて係合突起が形成されている。
上記クローラベルトはその係合突起が車輪の環状溝に入り込み、かつ、係合突起の両側の内周が上記車輪の摩擦係合要素の外面に接触するとともに、この摩擦係合要素間の摩擦係合溝に食い込むことにより、摩擦力だけでトルク伝達を行うようになっている。
上記係合突起と環状溝の係合は、クローラベルトの車輪からの幅方向位置ずれを防止し、ひいては車輪からの脱落を防止する役割も担う。また、上記摩擦係合溝は、砂や泥を排出する役割も担う。
【0007】
特許文献3のクローラ装置も、特許文献2と似た構成を備えている。すなわち、車輪の外周の幅方向中央に環状の溝が形成されており、その両側が受面として提供されている。各受面には、摩擦係合を助けるためのクローラ溝が周方向に間隔をおいて形成されている。他方、クローラベルトはゴム製であり、その内周の中央には間隔をおいて係合突起が形成されており、上記車輪の環状溝に入り込むようになっている。また、クローラベルトの内周において上記係止突起の両側には、摩擦係合を助けるためのクローラ溝が形成されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2006−168661号公報
【特許文献2】特開2002−178962号公報
【特許文献3】特開2004−276685号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1は、摩擦係合溝が砂や泥を排出する機能を持つものの、車輪の環状溝とクローラベルトの係合突起との間に砂や泥が入り込む可能性があり、クローラベルトの脱落、損傷や過剰テンション付与の不都合が生じる可能性を排除できなかった。
【0010】
特許文献2,3の車輪のクローラ溝は摩擦係合を助けるためのもので微細であり、砂や泥を排出する機能を持たないが、仮に排出機能を持っていたとしても特許文献1と同様の不都合があった。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するため、前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記車輪支持体または上記車輪本体に、上記クローラベルトの両側縁を係止する規制部材が設けられていることを特徴とする。
【0012】
上記構成によれば、車輪とクローラベルトは突起と係合穴との係合ではなく、摩擦力を伴う面接触だけで係合される。その結果、車輪とクローラベルトとの間に入った砂や泥によるクローラベルトの脱落、損傷や過剰テンション付与を防止できる。
車輪は弾性材料からなる外装体を有しており、この外装体の弾性で上記摩擦係合を強めることができる。
外装体に形成された凸部は外装体の幅方向に連続して延びており、凸部間に形成された排出溝が幅方向に貫通しているので、車輪とクローラベルトとの間に入った砂や泥は、外装体の幅方向の中央部に滞留することなく、排出溝から外部へ円滑に排出することができる。
規制手段としての規制部材がクローラベルトの両側縁を係止するので、クローラベルトの幅方向中央に規制手段を設けずに、クローラベルトの車輪に対する幅方向位置ずれを防止することができる。
【0013】
好ましくは、上記車輪支持体が左右一対の側板を含み、これら一対の側板間に上記車輪が配置され、これら側板の周縁部において、少なくとも上記車輪に対応する領域の一部に、上記規制部材が設けられている。
この構成によれば、比較的簡易な構造でクローラベルトの幅方向位置ずれを防止できる。
【0014】
好ましくは、上記車輪本体の両側面に上記規制部材が設けられており、これら規制部材は車輪本体の外周から径方向に突出して上記クローラベルトの両側縁を係止する。
この構成でも、比較的簡易な構造でクローラベルトの幅方向位置ずれを防止できる。
【0015】
好ましくは、上記クローラベルトの幅が上記車輪の外装体の幅より大きく、上記外装体の両側面と上記規制部材との間に空隙が形成されている。
この構成によれば、規制部材が比較的長い距離にわたってクローラベルトを係止する場合でも、排出溝からの砂や泥を、上記空隙を経て円滑に外部に排出することができる。
【0016】
好ましくは、上記クローラベルトが上記車輪から着脱可能であり、上記規制部材が上記車輪支持体または上記車輪本体から着脱可能であり、これらクローラベルトおよび規制部材の取り外し状態において、上記外装体の凸部が接地ラグとして提供される。
この構成によれば、クローラ装置を車輪式走行装置に切り替えて用いることができる。
【0017】
上記規制手段の他の態様は、上記クローラベルトの両側縁部に、その内周面から突出する規制突起が全周にわたって設けられており、この規制突起が排出溝の両端開口を一部のみ覆うようにして上記外装体の両側面に係止されている。
この構成でも、クローラベルトの幅方向中央に規制手段を設けずに、クローラベルトの車輪に対する幅方向位置ずれを防止することができる。
【0018】
好ましくは、上記クローラベルトが、ベース部と、このベース部の内周に全周にわたって形成されベース部より摩擦係数の高い摩擦層とを有し、この摩擦層が上記外装体の凸部頂面に面接触する。
この構成によれば、車輪とクローラベルトの間の摩擦係合をより一層強めることができる。
【0019】
本発明の他の態様は、クローラロボットにおいて、ボデイと、このボデイの左右に設けられた上記クローラ装置とを備えている。
【発明の効果】
【0020】
本発明のクローラ装置によれば、砂地や泥地等の軟弱地面をクローラベルトの脱落、損傷や過剰テンションが生じることなく、安定して走行することができる。
【図面の簡単な説明】
【0021】
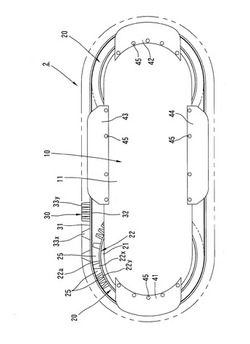
【図1】本発明の第1実施形態に係わるクローラ装置を備えた海底探査用クローラロボットの平面図である。
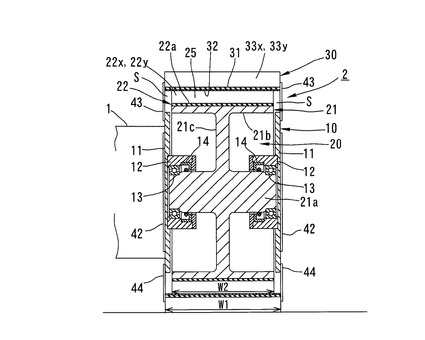
【図2】図1のA−A線に沿うクローラ装置の断面図である。
【図3】図1においてB方向から見たクローラ装置の側面図である。
【図4】本発明の第2実施形態に係わるクローラ装置の部分断面図である。
【図5】本発明の第3実施形態に係わるクローラ装置の部分断面図である。
【発明を実施するための形態】
【0022】
以下、本発明の第1実施形態に係わる海底探査用の軽量小型のクローラ式ロボットについて、図面を参照しながら説明する。
最初にロボットの基本構成を簡単に説明する。図1には理解を容易にするために、前後左右を矢印で示す。このロボットは、前後方向に細長いボデイ1と、このボデイ1の左右に設けられた一対のクローラ装置2とを備えている。
上記ボデイ1の前部にはビデオカメラ3が搭載され、後部にはグリップ4が固定されている。このグリップ4を掴んでロボットを持ち運びできるようになっている。
【0023】
上記ボデイ1にはさらに送受信機5が搭載されており、この送受信機5は、ロボットから離れた基地局(図示しない)の送受信機との間で送受信可能である。操作者はビデオカメラ3で撮影された映像を見ながら基地局のリモートコントローラの操作によりロボットの走行制御を行う。なお、海底探査等のように水中で使用する場合は、基地局が配置された母船とケーブルを介して送受信することで走行制御する。
上記ボデイ1には、ロボットの求められる役割に応じて、ロボットアーム等の種々の付属器具やセンサーを搭載してもよい。
【0024】
上記クローラ装置2の各々は、図2、図3に示すように、前後方向に延びる車輪支持体10と、この車輪支持体10の前後端部にそれぞれ回転可能に支持された車輪20と、これら車輪20間に掛け渡された無端状のクローラベルト30とを備えている。
【0025】
上記車輪支持体10は、前後方向に延びる左右一対の金属製(剛性)の側板11を有しており、これら側板11同士は、その中央部において連結部材(図示しない)を介して互いに固定されている。これら側板11において車輪20に対応する箇所の内面には短円筒形状のサポート12が固定されている。
【0026】
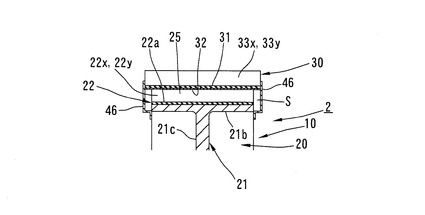
上記車輪20は、金属製(剛性)の車輪本体21と、この車輪本体21の外周に固着されたゴム(弾性材料)製のタイヤ22(外装材)とを備えている。
【0027】
上記車輪本体21は、車軸21aと、この車軸21aと同軸をなす円筒部21bと、車軸21aと円筒部21bとを連結する連結部21cとを有している。
車軸21aの左右端部は、ベアリング13を介して左右の側板11のサポート12に回転可能に支持されている。なお、符号14は環状のオイルシールを示す。
【0028】
図2は、従動輪となる前側の車輪20を示すが、駆動輪となる後側の車輪20も同様に構成されている。ただし、後側の車輪20の車軸21aはボデイ1内へと延び、この延長軸部がボデイ1に内蔵されたモータ(図示しない)に連結されている。なお、前側の車輪20を駆動輪とし、後側の車輪20を従動輪としてもよいし、前後両方の車輪20を駆動輪としてもよい。
【0029】
上記車輪20のタイヤ22は、円筒状をなして上記車輪本体21の外周に固着されたベース部22aと、その外周に周方向に間隔をおいて突出形成された多数の接地ラグ22x、22y(凸部)とを有している。これら接地ラグ22x、22yは同一高さを有し、タイヤ22の幅方向に連続して延び、ベース部22aと同じ幅を有している。接地ラグ22x、22yの頂面は、車輪の軸線を中心とする円筒面の一部を構成している。
【0030】
上記接地ラグ22x、22y間の間隙は、タイヤ22の幅方向に貫通した排出溝25として提供される。
本実施形態では、厚さ(周方向寸法)と形状が異なる2種類の接地ラグ22x、22yが形成されているが、この点については後述する。
【0031】
上記クローラベルト30は、ゴム(弾性材料)製であり、無端の平ベルト形状のベース部31と、このベース部31の内周に形成された摩擦層32と、ベース部31の外周に間隔を置いて突出形成された多数の接地ラグ33x、33yとを一体に有している。なお、このクローラベルト30は、ゴム材中に無端状スチールベルト、無端状ワイヤや不織布等の抗張部材を埋め込んでもよいことは勿論である。
【0032】
図2に示すように、クローラベルト30の幅W1は、タイヤ22の幅W2より大きく、クローラベルト30を車輪20に掛け渡した状態では、クローラベルト30の両縁部がタイヤ22の両縁部から幅方向に突出している。
【0033】
上記摩擦層32は、例えば、砥粒等を粘着材等に混入させた薄いシートをベース部31に接着することにより構成されている。摩擦層32は微小凹凸を有するものであり、ベース部31に比べて遥かに摩擦係数が高い。この摩擦層32が上記タイヤ22の接地ラグ22x、22yの頂面に接した状態で、両者の間の摩擦力により、クローラベルト30と車輪20とは周方向の相対的変位(滑る)が生じるのを防止できる(摩擦係合される)。
【0034】
上記のように車輪20とクローラベルト30とは面接触だけの摩擦係合により、トルク伝達が可能となり、トルク伝達のために車輪20に突起を形成せずに済み、クローラベルト30に係合穴を形成せずに済む。
なお、上記摩擦層32の代わりに弾性変形しやすい層を形成して、接地ラグ22x、22yとの摩擦係合を高めるようにしてもよい。
【0035】
上記本実施形態のクローラベルト30は、厚さ(周方向寸法)と形状が異なる2種類の接地ラグ33x、33yを有している。詳述すると、ベース部31の外周は、比較的短い第1接地ラグ形成領域と比較的長い第2接地ラグ形成領域を周方向に交互に有している。第1接地ラグ形成領域には、接地ラグ33xが所定数例えば2つずつ間隔をおいて配置されており、第2接地ラグ形成領域には、多数の接地ラグ33yが間隔をおいて配置されている。
【0036】
上記接地ラグ33xは厚肉でクローラベルト30の周方向の曲げ剛性が高く、幅方向に真直ぐ延びている。接地ラグ33yは薄肉でクローラベルト周方向の曲げ剛性が低く、く字形に折れ曲がった平面形状を有している。
上述した車輪20の接地ラグ22x、22yも、クローラベルト30の接地ラグ33x、33yにそれぞれ似た形状をなしている。
【0037】
上記左右の側板11の各々の外面の周縁部には、例えば4つの平板状の規制部材41〜44(規制手段)がクローラベルト30の周方向に間隔をおいて固定されている。規制部材41,42は互いに同形状をなし、側板11の前後縁部にそれぞれネジ45で固定され、これら前後縁部から前後方向に突出しており、規制部材43,44は側板11の上下縁部にそれぞれネジ45で固定され、これら上下縁部から上下方向に突出している。
【0038】
上記一対の側板11の前側の規制部材41は、前側の車輪20に掛けられたクローラベルト30の両側縁を係止することにより、クローラベルト30が前側の車輪20から外れるのを防止している。
同様に後側の一対の規制部材42は、後側の車輪20に掛けられたクローラベルト30の両側縁を係止することにより、クローラベルト30が後側の車輪20から外れるのを防止している。
【0039】
上述したように、クローラベルト30の幅W1は、タイヤ22の幅W2より大きいので、規制部材41,42とタイヤ22の両側面との間には、空隙Sが形成されている。
【0040】
上側の一対の規制部材43は、前後の車輪20間のクローラベルト30の上側部分の幅方向の位置ずれを規制し、下側の一対の規制部材44は、前後の車輪20間のクローラベルト30の下側部分の幅方向の位置ずれを規制している。
【0041】
上記クローラロボットの作用について簡単に説明する。ボデイ1に内蔵されたモータ(図示しない)により、各クローラ装置2が正逆方向に駆動されると、ロボットは、前進、後退、左右旋回、超信地旋回(その場旋回)する。
【0042】
上記ロボットが海底の砂地や泥濘地等の軟弱地盤を走行する際には、前後に長い左右のクローラ装置2が小さな接地圧で軟弱地面を深く掘らずに安定して走行できる。
【0043】
上記ロボットは接地ラグ33x、33yが高いので、段差(障害物)を乗り越えることもできる。特に本実施形態では、ロボットが走行して段差に突き当たったときに、薄肉の曲げ剛性の低い接地ラグ33yが折れ曲がり、この状態で厚肉の曲げ剛性の高い接地ラグ33xが段差の段鼻に引っ掛かるので、段差が高くても乗り越えることができる。
【0044】
走行中、砂や泥がタイヤ22とクローラベルト30との間に入り込むことがあるが、両者は摩擦係合されているだけであり、従来装置のような突起と係合穴の係合ではないので、クローラベルト30が車輪20の突起に乗り上げるような状況が生じず、しかも、車輪20とクローラベルト30との間に入り込んだ砂や泥は、タイヤ22に形成された排出溝25から排出することができる。
上記タイヤ22の接地ラグ22x、22yが幅方向に連続して延び、ひいては排出溝25が幅方向に連続して延びているので、砂や泥が円滑に排出され、中央に溜まることもない。
【0045】
上記クローラベルト30は、その幅方向両側縁が規制部材41〜44により係止されているので、幅方向に位置ずれするのを防止でき、車輪20から外れるのを防止することができる。
なお、クローラベルト30が幅方向にぶれたり、緩んだりしないようにするためには、規制部材41〜44を設けるのみでなく、クローラベルト30に張力を掛けることが有効である。張力を掛ける方法としては、予め両車輪20の間にクローラベルト30を架けておいてから車輪20と車軸とを楔型嵌め合わせにすることにより、両車輪20間の間隔を広げてクローラベルト30に張力をかける方法や、張力機構によりクローラベルト30に張力を付与する方法等がある。
【0046】
上記規制部材41,42は車輪20に掛けられたクローラベルト30を比較的長い距離にわたって係止しているが、規制部材41,42と車輪20のタイヤ22との間に空隙Sが形成されているので、規制部材41,42が砂や泥濘の排出を妨げることが無い。
【0047】
本実施形態において、規制部材41〜44を側板11から取り外し、クローラベルト30を車輪20から取り外すことにより、クローラ型ロボットから車輪型ロボットに切り替えることができる。この場合、車輪20の接地ラグ22x、22yが地面に接することなる。このロボットは海底よりはむしろ地上での走行に適している。接地ラグ22x、22yの段差乗り越え機能は、クローラロボット30の接地ラグ33x、33yと同様であるので、説明を省略する。
【0048】
なお、上記規制部材41〜44およびクローラベルト30が取り外しできなくても、その主要部を車輪走行型のロボットと兼用できるので、製造コストを低減できる。
【0049】
次に、本発明の他の実施形態を図を参照しながら説明する。各実施形態において、第1実施形態に対応する構成については図中同番号を付してその詳細な説明を省略する。
【0050】
図4に示す第2実施形態では、車輪20の車輪本体21の両側面に板状をなす複数の規制部材46が周方向に間隔をおいて固定されている。これら規制部材46は車輪本体21の外周から径方向に突出してクローラベルト30の両側縁を係止している。
上記規制部材46は車輪本体21の全周にわたり環状をなして固定されていてもよい。
本実施形態では、側板11が無いので、ロボットのボデイが車輪支持体を兼ねる。
【0051】
図5に示す第3実施形態では、クローラベルト30のベース部31の内周の両側縁部に、径方向に突出する規制突起39(規制手段)が全周にわたって一体に形成されている。これら一対の規制突起39がタイヤ22の両側面に係止されることにより、クローラベルト30の車輪20に対する幅方向の位置ずれが防止される。
上記規制突起39のベース部31内周からの突出高さは接地ラグ22x、22yのベース部22aからの突出高さより小さいため、規制突起39は排出溝25の幅方向の両端開口の一部しか覆わず、砂や泥の排出機能を損なわない。
【0052】
本発明は、上記実施形態に制約されず、種々の態様を採用することができる。
例えば、車輪のタイヤの凸部は、接地機能を考慮せずに形成してもよい。凸部および排出溝は、車輪の軸線に対して傾いていてもよい。
本発明は、ボデイの前端側に左右一対のクローラ装置を設け、後端側にも左右一対のクローラ装置を設けることにより、フリッパ型ロボットにも適用できる。これらクローラ装置は左右方向に水平に延びる回動軸線を中心としてそれぞれ回動される。
【産業上の利用可能性】
【0053】
本発明の人の搭乗しないクローラ装置およびクローラロボットは、海底等の軟弱地面の走行に適している。
【符号の説明】
【0054】
1 ボデイ
2 クローラ装置
10 車輪支持体
11 側板
20 車輪
21 車輪本体
22 タイヤ(外装体)
22x、22y 外装体の凸部(タイヤの接地ラグ)
25 排出溝
30 クローラベルト
31 ベース部
32 摩擦層
33x、33y クローラベルトの接地ラグ
39 規制突起(規制手段)
41〜44、46 規制部材(規制手段)
S 空隙
【技術分野】
【0001】
本発明は、海底等の軟弱地盤を走行するのに適した人が搭乗しないクローラ装置およびクローラロボットに関する。
【背景技術】
【0002】
海底探査等に用いられるロボットは、海底の軟弱地盤(砂地や泥濘地等)を走行することが多い。このようなロボットとしては、車輪式ロボットよりクローラ式ロボットの方が適している。車輪式ロボットでは車輪が軟弱地盤を深く掘って走行不能になることが多いのに比べて、クローラ式ロボットでは接地圧が小さいため、このような不都合が生じにくいからである。
【0003】
上記クローラ式ロボットにおける左右のクローラ装置は、前後の車輪間に無端状のクローラベルトを掛け渡すことにより構成されている。
車輪とクローラベルトはトルク伝達のために噛み合うようになっており、例えば特許文献1のクローラ装置では、車輪の周面に周方向に等間隔をおいて突起が設けられ、クローラベルトにはこれら突起に係合する係合穴が形成されている。
【0004】
特許文献1のロボットを海底探査に用いて軟弱地盤を走行させると、クローラベルトと車輪との間に砂や泥が入り込み、これにより上記突起と係合穴の係合が外れてクローラベルトが車輪から脱落したり、クローラベルトを傷めて破断に導いたり、クローラベルトに過剰なテンションが作用する不都合が生じる。
【0005】
特許文献2,3に開示されたクローラ装置のように、クローラベルトと車輪とが摩擦力だけで係合する構成を採用すれば、上記特許文献1の不都合は基本的には解消されるはずである。以下、特許文献2,3について詳述する。
【0006】
特許文献2のクローラ装置では、車輪の外周の幅方向中央に環状の溝が形成されており、その両側が受面として提供されている。各受面には、剛性の摩擦係合要素が周方向に間隔をおいて形成されている。他方、クローラベルトはゴム製であり、その内周の中央に間隔をおいて係合突起が形成されている。
上記クローラベルトはその係合突起が車輪の環状溝に入り込み、かつ、係合突起の両側の内周が上記車輪の摩擦係合要素の外面に接触するとともに、この摩擦係合要素間の摩擦係合溝に食い込むことにより、摩擦力だけでトルク伝達を行うようになっている。
上記係合突起と環状溝の係合は、クローラベルトの車輪からの幅方向位置ずれを防止し、ひいては車輪からの脱落を防止する役割も担う。また、上記摩擦係合溝は、砂や泥を排出する役割も担う。
【0007】
特許文献3のクローラ装置も、特許文献2と似た構成を備えている。すなわち、車輪の外周の幅方向中央に環状の溝が形成されており、その両側が受面として提供されている。各受面には、摩擦係合を助けるためのクローラ溝が周方向に間隔をおいて形成されている。他方、クローラベルトはゴム製であり、その内周の中央には間隔をおいて係合突起が形成されており、上記車輪の環状溝に入り込むようになっている。また、クローラベルトの内周において上記係止突起の両側には、摩擦係合を助けるためのクローラ溝が形成されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2006−168661号公報
【特許文献2】特開2002−178962号公報
【特許文献3】特開2004−276685号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1は、摩擦係合溝が砂や泥を排出する機能を持つものの、車輪の環状溝とクローラベルトの係合突起との間に砂や泥が入り込む可能性があり、クローラベルトの脱落、損傷や過剰テンション付与の不都合が生じる可能性を排除できなかった。
【0010】
特許文献2,3の車輪のクローラ溝は摩擦係合を助けるためのもので微細であり、砂や泥を排出する機能を持たないが、仮に排出機能を持っていたとしても特許文献1と同様の不都合があった。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するため、前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記車輪支持体または上記車輪本体に、上記クローラベルトの両側縁を係止する規制部材が設けられていることを特徴とする。
【0012】
上記構成によれば、車輪とクローラベルトは突起と係合穴との係合ではなく、摩擦力を伴う面接触だけで係合される。その結果、車輪とクローラベルトとの間に入った砂や泥によるクローラベルトの脱落、損傷や過剰テンション付与を防止できる。
車輪は弾性材料からなる外装体を有しており、この外装体の弾性で上記摩擦係合を強めることができる。
外装体に形成された凸部は外装体の幅方向に連続して延びており、凸部間に形成された排出溝が幅方向に貫通しているので、車輪とクローラベルトとの間に入った砂や泥は、外装体の幅方向の中央部に滞留することなく、排出溝から外部へ円滑に排出することができる。
規制手段としての規制部材がクローラベルトの両側縁を係止するので、クローラベルトの幅方向中央に規制手段を設けずに、クローラベルトの車輪に対する幅方向位置ずれを防止することができる。
【0013】
好ましくは、上記車輪支持体が左右一対の側板を含み、これら一対の側板間に上記車輪が配置され、これら側板の周縁部において、少なくとも上記車輪に対応する領域の一部に、上記規制部材が設けられている。
この構成によれば、比較的簡易な構造でクローラベルトの幅方向位置ずれを防止できる。
【0014】
好ましくは、上記車輪本体の両側面に上記規制部材が設けられており、これら規制部材は車輪本体の外周から径方向に突出して上記クローラベルトの両側縁を係止する。
この構成でも、比較的簡易な構造でクローラベルトの幅方向位置ずれを防止できる。
【0015】
好ましくは、上記クローラベルトの幅が上記車輪の外装体の幅より大きく、上記外装体の両側面と上記規制部材との間に空隙が形成されている。
この構成によれば、規制部材が比較的長い距離にわたってクローラベルトを係止する場合でも、排出溝からの砂や泥を、上記空隙を経て円滑に外部に排出することができる。
【0016】
好ましくは、上記クローラベルトが上記車輪から着脱可能であり、上記規制部材が上記車輪支持体または上記車輪本体から着脱可能であり、これらクローラベルトおよび規制部材の取り外し状態において、上記外装体の凸部が接地ラグとして提供される。
この構成によれば、クローラ装置を車輪式走行装置に切り替えて用いることができる。
【0017】
上記規制手段の他の態様は、上記クローラベルトの両側縁部に、その内周面から突出する規制突起が全周にわたって設けられており、この規制突起が排出溝の両端開口を一部のみ覆うようにして上記外装体の両側面に係止されている。
この構成でも、クローラベルトの幅方向中央に規制手段を設けずに、クローラベルトの車輪に対する幅方向位置ずれを防止することができる。
【0018】
好ましくは、上記クローラベルトが、ベース部と、このベース部の内周に全周にわたって形成されベース部より摩擦係数の高い摩擦層とを有し、この摩擦層が上記外装体の凸部頂面に面接触する。
この構成によれば、車輪とクローラベルトの間の摩擦係合をより一層強めることができる。
【0019】
本発明の他の態様は、クローラロボットにおいて、ボデイと、このボデイの左右に設けられた上記クローラ装置とを備えている。
【発明の効果】
【0020】
本発明のクローラ装置によれば、砂地や泥地等の軟弱地面をクローラベルトの脱落、損傷や過剰テンションが生じることなく、安定して走行することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1実施形態に係わるクローラ装置を備えた海底探査用クローラロボットの平面図である。
【図2】図1のA−A線に沿うクローラ装置の断面図である。
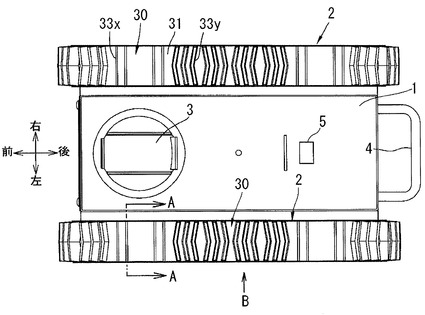
【図3】図1においてB方向から見たクローラ装置の側面図である。
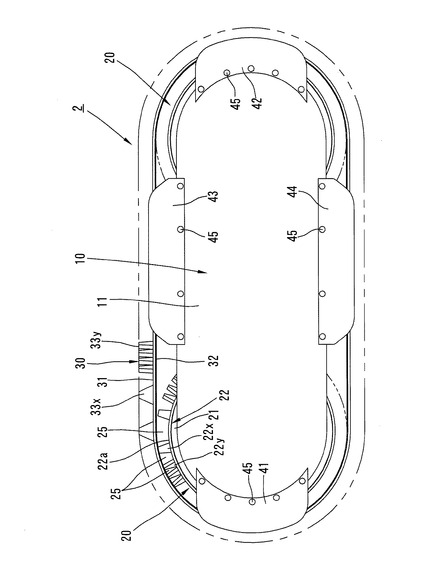
【図4】本発明の第2実施形態に係わるクローラ装置の部分断面図である。
【図5】本発明の第3実施形態に係わるクローラ装置の部分断面図である。
【発明を実施するための形態】
【0022】
以下、本発明の第1実施形態に係わる海底探査用の軽量小型のクローラ式ロボットについて、図面を参照しながら説明する。
最初にロボットの基本構成を簡単に説明する。図1には理解を容易にするために、前後左右を矢印で示す。このロボットは、前後方向に細長いボデイ1と、このボデイ1の左右に設けられた一対のクローラ装置2とを備えている。
上記ボデイ1の前部にはビデオカメラ3が搭載され、後部にはグリップ4が固定されている。このグリップ4を掴んでロボットを持ち運びできるようになっている。
【0023】
上記ボデイ1にはさらに送受信機5が搭載されており、この送受信機5は、ロボットから離れた基地局(図示しない)の送受信機との間で送受信可能である。操作者はビデオカメラ3で撮影された映像を見ながら基地局のリモートコントローラの操作によりロボットの走行制御を行う。なお、海底探査等のように水中で使用する場合は、基地局が配置された母船とケーブルを介して送受信することで走行制御する。
上記ボデイ1には、ロボットの求められる役割に応じて、ロボットアーム等の種々の付属器具やセンサーを搭載してもよい。
【0024】
上記クローラ装置2の各々は、図2、図3に示すように、前後方向に延びる車輪支持体10と、この車輪支持体10の前後端部にそれぞれ回転可能に支持された車輪20と、これら車輪20間に掛け渡された無端状のクローラベルト30とを備えている。
【0025】
上記車輪支持体10は、前後方向に延びる左右一対の金属製(剛性)の側板11を有しており、これら側板11同士は、その中央部において連結部材(図示しない)を介して互いに固定されている。これら側板11において車輪20に対応する箇所の内面には短円筒形状のサポート12が固定されている。
【0026】
上記車輪20は、金属製(剛性)の車輪本体21と、この車輪本体21の外周に固着されたゴム(弾性材料)製のタイヤ22(外装材)とを備えている。
【0027】
上記車輪本体21は、車軸21aと、この車軸21aと同軸をなす円筒部21bと、車軸21aと円筒部21bとを連結する連結部21cとを有している。
車軸21aの左右端部は、ベアリング13を介して左右の側板11のサポート12に回転可能に支持されている。なお、符号14は環状のオイルシールを示す。
【0028】
図2は、従動輪となる前側の車輪20を示すが、駆動輪となる後側の車輪20も同様に構成されている。ただし、後側の車輪20の車軸21aはボデイ1内へと延び、この延長軸部がボデイ1に内蔵されたモータ(図示しない)に連結されている。なお、前側の車輪20を駆動輪とし、後側の車輪20を従動輪としてもよいし、前後両方の車輪20を駆動輪としてもよい。
【0029】
上記車輪20のタイヤ22は、円筒状をなして上記車輪本体21の外周に固着されたベース部22aと、その外周に周方向に間隔をおいて突出形成された多数の接地ラグ22x、22y(凸部)とを有している。これら接地ラグ22x、22yは同一高さを有し、タイヤ22の幅方向に連続して延び、ベース部22aと同じ幅を有している。接地ラグ22x、22yの頂面は、車輪の軸線を中心とする円筒面の一部を構成している。
【0030】
上記接地ラグ22x、22y間の間隙は、タイヤ22の幅方向に貫通した排出溝25として提供される。
本実施形態では、厚さ(周方向寸法)と形状が異なる2種類の接地ラグ22x、22yが形成されているが、この点については後述する。
【0031】
上記クローラベルト30は、ゴム(弾性材料)製であり、無端の平ベルト形状のベース部31と、このベース部31の内周に形成された摩擦層32と、ベース部31の外周に間隔を置いて突出形成された多数の接地ラグ33x、33yとを一体に有している。なお、このクローラベルト30は、ゴム材中に無端状スチールベルト、無端状ワイヤや不織布等の抗張部材を埋め込んでもよいことは勿論である。
【0032】
図2に示すように、クローラベルト30の幅W1は、タイヤ22の幅W2より大きく、クローラベルト30を車輪20に掛け渡した状態では、クローラベルト30の両縁部がタイヤ22の両縁部から幅方向に突出している。
【0033】
上記摩擦層32は、例えば、砥粒等を粘着材等に混入させた薄いシートをベース部31に接着することにより構成されている。摩擦層32は微小凹凸を有するものであり、ベース部31に比べて遥かに摩擦係数が高い。この摩擦層32が上記タイヤ22の接地ラグ22x、22yの頂面に接した状態で、両者の間の摩擦力により、クローラベルト30と車輪20とは周方向の相対的変位(滑る)が生じるのを防止できる(摩擦係合される)。
【0034】
上記のように車輪20とクローラベルト30とは面接触だけの摩擦係合により、トルク伝達が可能となり、トルク伝達のために車輪20に突起を形成せずに済み、クローラベルト30に係合穴を形成せずに済む。
なお、上記摩擦層32の代わりに弾性変形しやすい層を形成して、接地ラグ22x、22yとの摩擦係合を高めるようにしてもよい。
【0035】
上記本実施形態のクローラベルト30は、厚さ(周方向寸法)と形状が異なる2種類の接地ラグ33x、33yを有している。詳述すると、ベース部31の外周は、比較的短い第1接地ラグ形成領域と比較的長い第2接地ラグ形成領域を周方向に交互に有している。第1接地ラグ形成領域には、接地ラグ33xが所定数例えば2つずつ間隔をおいて配置されており、第2接地ラグ形成領域には、多数の接地ラグ33yが間隔をおいて配置されている。
【0036】
上記接地ラグ33xは厚肉でクローラベルト30の周方向の曲げ剛性が高く、幅方向に真直ぐ延びている。接地ラグ33yは薄肉でクローラベルト周方向の曲げ剛性が低く、く字形に折れ曲がった平面形状を有している。
上述した車輪20の接地ラグ22x、22yも、クローラベルト30の接地ラグ33x、33yにそれぞれ似た形状をなしている。
【0037】
上記左右の側板11の各々の外面の周縁部には、例えば4つの平板状の規制部材41〜44(規制手段)がクローラベルト30の周方向に間隔をおいて固定されている。規制部材41,42は互いに同形状をなし、側板11の前後縁部にそれぞれネジ45で固定され、これら前後縁部から前後方向に突出しており、規制部材43,44は側板11の上下縁部にそれぞれネジ45で固定され、これら上下縁部から上下方向に突出している。
【0038】
上記一対の側板11の前側の規制部材41は、前側の車輪20に掛けられたクローラベルト30の両側縁を係止することにより、クローラベルト30が前側の車輪20から外れるのを防止している。
同様に後側の一対の規制部材42は、後側の車輪20に掛けられたクローラベルト30の両側縁を係止することにより、クローラベルト30が後側の車輪20から外れるのを防止している。
【0039】
上述したように、クローラベルト30の幅W1は、タイヤ22の幅W2より大きいので、規制部材41,42とタイヤ22の両側面との間には、空隙Sが形成されている。
【0040】
上側の一対の規制部材43は、前後の車輪20間のクローラベルト30の上側部分の幅方向の位置ずれを規制し、下側の一対の規制部材44は、前後の車輪20間のクローラベルト30の下側部分の幅方向の位置ずれを規制している。
【0041】
上記クローラロボットの作用について簡単に説明する。ボデイ1に内蔵されたモータ(図示しない)により、各クローラ装置2が正逆方向に駆動されると、ロボットは、前進、後退、左右旋回、超信地旋回(その場旋回)する。
【0042】
上記ロボットが海底の砂地や泥濘地等の軟弱地盤を走行する際には、前後に長い左右のクローラ装置2が小さな接地圧で軟弱地面を深く掘らずに安定して走行できる。
【0043】
上記ロボットは接地ラグ33x、33yが高いので、段差(障害物)を乗り越えることもできる。特に本実施形態では、ロボットが走行して段差に突き当たったときに、薄肉の曲げ剛性の低い接地ラグ33yが折れ曲がり、この状態で厚肉の曲げ剛性の高い接地ラグ33xが段差の段鼻に引っ掛かるので、段差が高くても乗り越えることができる。
【0044】
走行中、砂や泥がタイヤ22とクローラベルト30との間に入り込むことがあるが、両者は摩擦係合されているだけであり、従来装置のような突起と係合穴の係合ではないので、クローラベルト30が車輪20の突起に乗り上げるような状況が生じず、しかも、車輪20とクローラベルト30との間に入り込んだ砂や泥は、タイヤ22に形成された排出溝25から排出することができる。
上記タイヤ22の接地ラグ22x、22yが幅方向に連続して延び、ひいては排出溝25が幅方向に連続して延びているので、砂や泥が円滑に排出され、中央に溜まることもない。
【0045】
上記クローラベルト30は、その幅方向両側縁が規制部材41〜44により係止されているので、幅方向に位置ずれするのを防止でき、車輪20から外れるのを防止することができる。
なお、クローラベルト30が幅方向にぶれたり、緩んだりしないようにするためには、規制部材41〜44を設けるのみでなく、クローラベルト30に張力を掛けることが有効である。張力を掛ける方法としては、予め両車輪20の間にクローラベルト30を架けておいてから車輪20と車軸とを楔型嵌め合わせにすることにより、両車輪20間の間隔を広げてクローラベルト30に張力をかける方法や、張力機構によりクローラベルト30に張力を付与する方法等がある。
【0046】
上記規制部材41,42は車輪20に掛けられたクローラベルト30を比較的長い距離にわたって係止しているが、規制部材41,42と車輪20のタイヤ22との間に空隙Sが形成されているので、規制部材41,42が砂や泥濘の排出を妨げることが無い。
【0047】
本実施形態において、規制部材41〜44を側板11から取り外し、クローラベルト30を車輪20から取り外すことにより、クローラ型ロボットから車輪型ロボットに切り替えることができる。この場合、車輪20の接地ラグ22x、22yが地面に接することなる。このロボットは海底よりはむしろ地上での走行に適している。接地ラグ22x、22yの段差乗り越え機能は、クローラロボット30の接地ラグ33x、33yと同様であるので、説明を省略する。
【0048】
なお、上記規制部材41〜44およびクローラベルト30が取り外しできなくても、その主要部を車輪走行型のロボットと兼用できるので、製造コストを低減できる。
【0049】
次に、本発明の他の実施形態を図を参照しながら説明する。各実施形態において、第1実施形態に対応する構成については図中同番号を付してその詳細な説明を省略する。
【0050】
図4に示す第2実施形態では、車輪20の車輪本体21の両側面に板状をなす複数の規制部材46が周方向に間隔をおいて固定されている。これら規制部材46は車輪本体21の外周から径方向に突出してクローラベルト30の両側縁を係止している。
上記規制部材46は車輪本体21の全周にわたり環状をなして固定されていてもよい。
本実施形態では、側板11が無いので、ロボットのボデイが車輪支持体を兼ねる。
【0051】
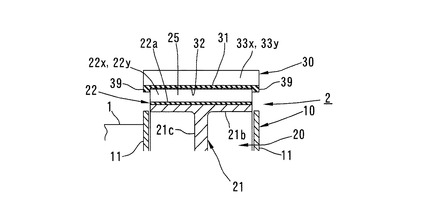
図5に示す第3実施形態では、クローラベルト30のベース部31の内周の両側縁部に、径方向に突出する規制突起39(規制手段)が全周にわたって一体に形成されている。これら一対の規制突起39がタイヤ22の両側面に係止されることにより、クローラベルト30の車輪20に対する幅方向の位置ずれが防止される。
上記規制突起39のベース部31内周からの突出高さは接地ラグ22x、22yのベース部22aからの突出高さより小さいため、規制突起39は排出溝25の幅方向の両端開口の一部しか覆わず、砂や泥の排出機能を損なわない。
【0052】
本発明は、上記実施形態に制約されず、種々の態様を採用することができる。
例えば、車輪のタイヤの凸部は、接地機能を考慮せずに形成してもよい。凸部および排出溝は、車輪の軸線に対して傾いていてもよい。
本発明は、ボデイの前端側に左右一対のクローラ装置を設け、後端側にも左右一対のクローラ装置を設けることにより、フリッパ型ロボットにも適用できる。これらクローラ装置は左右方向に水平に延びる回動軸線を中心としてそれぞれ回動される。
【産業上の利用可能性】
【0053】
本発明の人の搭乗しないクローラ装置およびクローラロボットは、海底等の軟弱地面の走行に適している。
【符号の説明】
【0054】
1 ボデイ
2 クローラ装置
10 車輪支持体
11 側板
20 車輪
21 車輪本体
22 タイヤ(外装体)
22x、22y 外装体の凸部(タイヤの接地ラグ)
25 排出溝
30 クローラベルト
31 ベース部
32 摩擦層
33x、33y クローラベルトの接地ラグ
39 規制突起(規制手段)
41〜44、46 規制部材(規制手段)
S 空隙
【特許請求の範囲】
【請求項1】
前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記車輪支持体または上記車輪本体に、上記クローラベルトの両側縁を係止する規制部材が設けられていることを特徴とするクローラ装置。
【請求項2】
上記車輪支持体が左右一対の側板を含み、これら一対の側板間に上記車輪が配置され、これら側板の周縁部において、少なくとも上記車輪に対応する領域の一部に、上記規制部材が設けられていることを特徴とする請求項1に記載のクローラ装置。
【請求項3】
上記車輪本体の両側面に上記規制部材が設けられており、これら規制部材は車輪本体の外周から径方向に突出して上記クローラベルトの両側縁を係止することを特徴とする請求項1に記載のクローラ装置。
【請求項4】
上記クローラベルトの幅が上記車輪の外装体の幅より大きく、上記外装体の両側面と上記規制部材との間に空隙が形成されていることを特徴とする請求項2または3に記載のクローラ装置。
【請求項5】
上記クローラベルトが上記車輪から着脱可能であり、上記規制部材が上記車輪支持体または上記車輪本体から着脱可能であり、これらクローラベルトおよび規制部材の取り外し状態において、上記外装体の凸部が接地ラグとして提供されることを特徴とする請求項1〜4のいずれかに記載のクローラ装置。
【請求項6】
前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記クローラベルトの両側縁部に、その内周面から突出する規制突起が全周にわたって設けられており、この規制突起が排出溝の両端開口を一部のみ覆うようにして上記外装体の両側面に係止されていることを特徴とするクローラ装置。
【請求項7】
上記クローラベルトが、ベース部と、このベース部の内周に全周にわたって形成されベース部より摩擦係数の高い摩擦層とを有し、この摩擦層が上記外装体の凸部頂面に面接触することを特徴とする請求項1に記載のクローラ装置。
【請求項8】
ボデイと、このボデイの左右に設けられた請求項1〜7のいずれかに記載のクローラ装置とを備えたロボット。
【請求項1】
前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記車輪支持体または上記車輪本体に、上記クローラベルトの両側縁を係止する規制部材が設けられていることを特徴とするクローラ装置。
【請求項2】
上記車輪支持体が左右一対の側板を含み、これら一対の側板間に上記車輪が配置され、これら側板の周縁部において、少なくとも上記車輪に対応する領域の一部に、上記規制部材が設けられていることを特徴とする請求項1に記載のクローラ装置。
【請求項3】
上記車輪本体の両側面に上記規制部材が設けられており、これら規制部材は車輪本体の外周から径方向に突出して上記クローラベルトの両側縁を係止することを特徴とする請求項1に記載のクローラ装置。
【請求項4】
上記クローラベルトの幅が上記車輪の外装体の幅より大きく、上記外装体の両側面と上記規制部材との間に空隙が形成されていることを特徴とする請求項2または3に記載のクローラ装置。
【請求項5】
上記クローラベルトが上記車輪から着脱可能であり、上記規制部材が上記車輪支持体または上記車輪本体から着脱可能であり、これらクローラベルトおよび規制部材の取り外し状態において、上記外装体の凸部が接地ラグとして提供されることを特徴とする請求項1〜4のいずれかに記載のクローラ装置。
【請求項6】
前後方向に延びる車輪支持体と、上記車輪支持体の前部および後部に回転可能に支持された車輪と、これら前後の車輪に掛け渡された無端状の弾性材料からなるクローラベルトとを備えたクローラ装置において、
上記車輪が、剛性の車輪本体と、この車輪本体の外周に固着された弾性材料からなる外装体とを有し、
上記車輪の外装体の外周には、周方向に間隔をおいて形成され幅方向に連続して延びる凸部が形成され、これら凸部間に外装体の幅方向に貫通する排出溝が形成され、
上記車輪の外装体の凸部の頂面と上記クローラベルトの内周面が、摩擦力を伴って面接触し、
さらに、上記クローラベルトの上記車輪に対する幅方向の位置ずれを規制するための規制手段として、上記クローラベルトの両側縁部に、その内周面から突出する規制突起が全周にわたって設けられており、この規制突起が排出溝の両端開口を一部のみ覆うようにして上記外装体の両側面に係止されていることを特徴とするクローラ装置。
【請求項7】
上記クローラベルトが、ベース部と、このベース部の内周に全周にわたって形成されベース部より摩擦係数の高い摩擦層とを有し、この摩擦層が上記外装体の凸部頂面に面接触することを特徴とする請求項1に記載のクローラ装置。
【請求項8】
ボデイと、このボデイの左右に設けられた請求項1〜7のいずれかに記載のクローラ装置とを備えたロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−61962(P2012−61962A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−207944(P2010−207944)
【出願日】平成22年9月16日(2010.9.16)
【出願人】(000110251)トピー工業株式会社 (255)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(390008338)広和株式会社 (21)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月16日(2010.9.16)
【出願人】(000110251)トピー工業株式会社 (255)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(390008338)広和株式会社 (21)
[ Back to top ]