
グリッパ
【課題】確実且つ容易に縫合針を把持可能であって、操作性の良いグリッパを提供する。
【解決手段】本発明グリッパ10は、縫合針5を把持するグリッパ10であって、回転軸14を介して連結される一対の基体11、12を具備し、前記基体11、12の一端は前記操作部として機能し、他端は前記一端の操作にしたがって開閉動作し、前記縫合針5を把持する把持面11a、12aを有しており、一方の前記基体11の把持面11aには中央部が凸状に形成された凸部13が形成され、他方の前記基体12の把持面12aには当該凸部13の周面に沿って重なり合う凹部14が形成されている。
【解決手段】本発明グリッパ10は、縫合針5を把持するグリッパ10であって、回転軸14を介して連結される一対の基体11、12を具備し、前記基体11、12の一端は前記操作部として機能し、他端は前記一端の操作にしたがって開閉動作し、前記縫合針5を把持する把持面11a、12aを有しており、一方の前記基体11の把持面11aには中央部が凸状に形成された凸部13が形成され、他方の前記基体12の把持面12aには当該凸部13の周面に沿って重なり合う凹部14が形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外科手術等で用いられる縫合用の針(以下、「縫合針」と称する)を把持するためのグリッパに関し、特に、脳外科用又は腹腔鏡下手術に用いるのに好適なグリッパに関する。
【背景技術】
【0002】
近年、開腹手術に代わり、患者への負担を軽減するために非開腹で行う腹腔鏡下手術が注目されている。このような腹腔鏡下手術では、患者の腹部に小さな孔をいくつかあけ、それらの孔に内視鏡、鉗子等を挿入し、術者が内視鏡の映像をモニタで見ながら外科的処置を行う。
【0003】
このような腹腔鏡下手術において用いられるグリッパは、例えば、縫合針を把持し体腔内の目的組織に穿刺するのに用いられ、縫合時には、術者によって縫合針の先端が穿刺する組織と直角に位置する姿勢となるように縫合針の姿勢が操作される。
【0004】
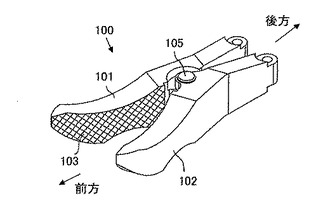
従来のグリッパ100は、図11に示すように、一対の基体101、102が回転軸105を介して連結されており、基体101、102の後方が開閉操作されることにより、当該回転軸105を支点として前方が開閉動作する。縫合針は、当該開閉動作により、対向する基体101、102の前方に有する把持面103で把持される。この把持面103には、例えば、所定のスリットが格子状に形成されている。
【0005】
このようなグリッパは、例えば、術者が操作を行う操作部と、この操作部に接続され、患者の体腔内に挿入される挿入部を備えた本体部と、を備えるマニピュレータ装置に取り付けられる。このマニピュレータ装置では、術者による操作部の操作によって、本体部に設けられた駆動部が駆動する動力を伝達部材を介してグリッパに伝達し、当該グリッパの開閉動作が行われる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第4377827号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このようなグリッパは、すべりやすく、把持圧が低いなどの理由から高度な操作技術を必要とし、縫合針を腹腔内に落とす虞がある。
【0008】
また、縫合針の向きを適切な向きで把持する必要性があるものの、掴み違いなどを起こす場合がある。
【0009】
本発明は、このような問題の解消を一つの課題とし、その目的の一例は、確実且つ容易に縫合針を把持可能であって、操作性の良いグリッパを提供するものである。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載のグリッパは、縫合針を把持するグリッパであって、回転軸を介して連結される一対の基体を具備し、前記基体の一端は前記操作部として機能し、他端は前記一端の操作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とする。
【0011】
また、請求項2に記載のグリッパは、縫合針を把持するグリッパと、伝達部材を介して当該グリッパを開閉動作させる操作部と、を具備するマニピュレータ装置のグリッパであって、前記グリッパは、回転軸を介して連結される一対の基体を具備し、前記基体の一端は前記伝達部材に接続され、他端は前記伝達部材の動作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とする。
【0012】
また、請求項3に記載のグリッパは、請求項2に記載のグリッパにおいて、前記凸部の頂部と前記基体の把持面の両端部には凹凸部が形成されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、操作性が向上し、縫合針の掴み違いが発生せずに、確実且つ容易に縫合針を把持することができる。
【図面の簡単な説明】
【0014】
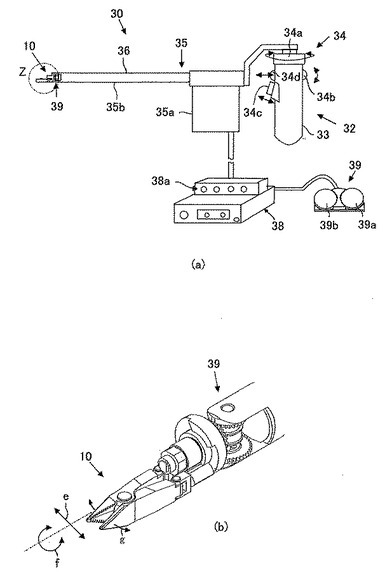
【図1】本実施形態のグリッパが取り付けられるマニピュレータ装置を示し、図1(a)は外観図、図1(b)はZ部分の拡大図である。
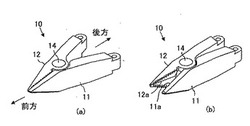
【図2】本実施形態のグリッパの外観図であり、図2(a)は閉動作時のグリッパの斜視図、図2(b)は開動作時のグリッパの斜視図である。
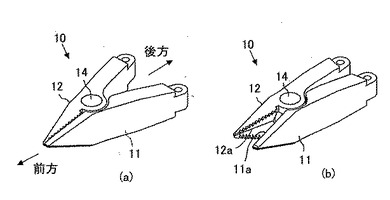
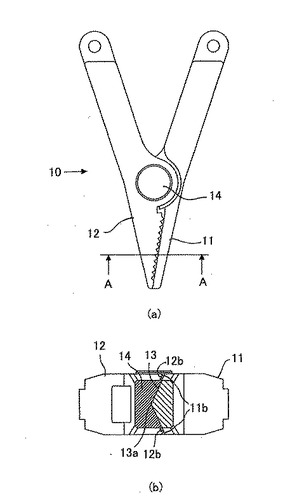
【図3】グリッパの平面図であり、図3(a)は閉動作時のグリッパの平面図、図3(b)は開動作時のグリッパの平面図である。
【図4】グリッパの一方の基体を示す斜視図である。
【図5】グリッパの他方の基体を示す斜視図である。
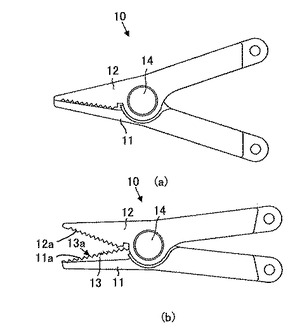
【図6】グリッパの構成を示し、図6(a)は平面図、図6(b)はA−A断面図である。
【図7】縫合針を把持した時のグリッパの状態図である。
【図8】図7のX部分の断面図である。
【図9】他のグリッパにおいて縫合針を把持した時の状態図である。
【図10】他のグリッパの外観を示す平面図である。
【図11】従来のグリッパの外観を示す斜視図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施形態について説明する。なお、以下に示すグリッパ10の開閉動作とは、グリッパ10を構成する双方の基体11、12の前方部が近接又は離れる方向に移動する動作をいう。
【0016】
本実施形態のグリッパ10は、例えば脳外科用手術に用いられ、縫合針5を把持する器具である。このグリッパ10はマニピュレータ装置30に取り付けられて用いられる。なお、マニピュレータ装置30は、公知技術であるため、詳細な説明は省略するものとする。
【0017】
マニピュレータ装置30は、図1に示すように、患者の体腔内に挿入される挿入部36を備えた本体部35と、挿入部36の先端に配置されるグリッパ10と、このグリッパ10を開閉動作するために術者が手動で操作を行う手動操作部32と、このグリッパ10を開閉動作するために術者が足で操作を行う足操作部39と、手動操作部32及び足操作部39の操作に基づいてグリッパ10の動作を制御する制御部38と、を備えている。なお、グリッパ10を取り替える場合には、グリッパ10を含む挿入部36全体が取り外されて、新たなグリッパ10が挿入部36全体とともに取り付けられる。
【0018】
本体部35は、駆動部(モータ類等)等を収容する収容体35aと、この駆動部の駆動力をグリッパ10に伝達する歯車群等を含む伝達部材39が収容された中空状の長尺部材35bと、を備えている。
【0019】
手動操作部32は、術者によって保持される略円筒状のグリップ33を備えている。このグリップ33には、グリッパ10の方向を操作するための操作デバイス34を備えている。
【0020】
操作デバイス34は、図1(b)の矢印e、f、gに示すように、グリッパ10を3つの自由度(ヨー、ロール、開閉)で動作させるための指令を行うものであって、例えば、図1に示すように、グリップ33の上端部に配置された横方向に回転可能な横方向操作ダイヤル34aと、グリップ33の上端部後方に配置された縦方向に回転可能な縦方向操作ダイヤル34bと、グリップ33の中央部前方に配置された操作トリガ34cと、操作トリガ34cの上部に配置された押しボタンスイッチ34dと、を備えており、各々は、術者によってグリップ33が保持された状態において操作可能な位置に配置されている。
【0021】
横方向操作ダイヤル34aは、図1(b)中の矢印eに示すように、ヨー軸を制御するものであって、グリッパ10を左右方向に動作させるための回転体であり、縦方向操舵ダイヤル34bは、図1(b)中の矢印fに示すように、ロール軸を制御するものであって、グリッパ10を回転動作させるための回転体である。また、操作トリガ34cは、図1(b)中の矢印gに示すように、グリッパ10を開閉動作させるためのスイッチであり、押しボタンスイッチ34dは、グリッパ10の動作の開始又は停止等を制御するためのスイッチである。
【0022】
なお、例えば横方向操作ダイヤル34aを回転させることで、グリッパ10が延出する方向に対して左右方向にグリッパ10を可変可能となっており、縦方向操作ダイヤル34bを回転させることで、グリッパ10が延出する方向と略同一軸回りに回転可能となっている。また、操作トリガ34cの挟持量によって、グリッパ10の開閉量を調整することが可能である。これら操作デバイス34の操作によって、グリッパ10を任意の姿勢へと誘導することが可能となっている。
【0023】
一方、足操作部39は、術者によって踏まれる左右のフットスイッチ39a、39bを備えている。このフットスイッチ39a、39bは、グリッパ10の開閉モードの切替、及びグリッパの軸の固定モードの切替動作をさせるための指令を行うものである。この開閉モードとは、例えば、グリッパ10を開いた状態から閉じる状態へ動作させるモードと、グリッパ10を閉じた状態から開いた状態へ動作させるモードと、を備え、右側のフットスイッチ39aを押すたびにこのモードが切り替わる。
【0024】
グリッパ10の軸の固定モードとは、例えば、操作トリガ34cの操作に関係なく、一時的にグリッパの開閉動作を固定するモードと、解除するモードと、を備え、左側のフットスイッチ39bを押すたびにこのモードが切り替わる。
【0025】
制御部38は、ユーザが操作するための操作ボタンを備えた筐体を有し、この筐体の上面には、手動操作部32及び足操作部39の操作によるグリッパ10の操作状態等を表示する表示部38aが設けられている。
【0026】
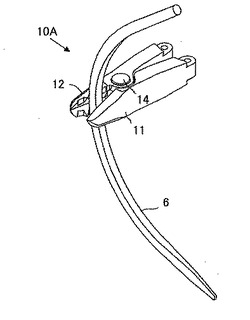
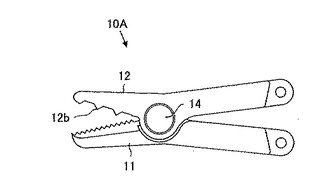
グリッパ10は、図2に示すように、一対の基体11、12が回転軸14を介して連結されており、基体11、12の後方が開閉操作されることにより、回転軸14を支点として前方が開閉動作する。基体11、12の後方は、伝達部材39に連結され、伝達部材39の動作にしたがってグリッパ10が上述したように動作する。
【0027】
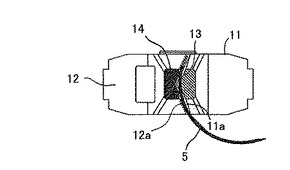
このグリッパ10には、例えば、湾曲状の縫合用針5が把持される(図7参照)。具体的には、この縫合用針5は、一対の基体11、12の前方に有する互いに対向する面(以下、「把持面11a、12a」)において、グリッパ10の閉動作によって所定の挟持力にて把持される。
【0028】
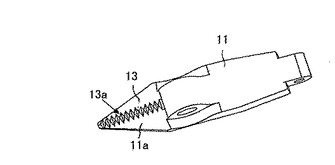
図3及び図4に示すように、一方の基体11の把持面11aには、両端部から中央部に向かって盛り上がるように(突状に)形成された凸部13を有しており、この凸部13は、把持面11aの両端部から中央部に向かって傾斜するテーパ面を有しており、凸部13の頂部は先鋭状に形成されている。また、この凸部13の頂部には、鋸刃状の凹凸部13aがその軸線方向に連続状に並んで形成されている。
【0029】
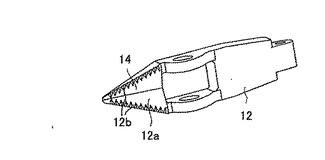
一方、図5に示すように、他方の基体12の把持面12aには、グリッパ10の閉動作において、当該凸部13の周面に重なり合うように形成される凹部14を有し、その把持面12aの端部周囲には、鋸刃状の凹凸部12bが連続状に並んで配置されている。
【0030】
そして、グリッパ10の閉動作において、図6(b)に示すように、一方の基体11に形成された凸部13は、他方の基体12に形成された凹部14と重なり合うとともに、前記凸部13の頂部に形成された凹凸部13aが他方の基体12に形成された凹部14の頂部と接触する一方で、他方の基体12の把持面12aに有する凹凸部12bが、一方の基体11の把持面11bに接触するようになっている。
【0031】
このように構成されたグリッパ10には、図7に示すように、その閉動作によって湾曲状に形成された縫合針5が把持される。この場合、図8に示すように、縫合針5は、両方の基体11、12の把持面11a、12aの両端部とその中央部に形成された凸部13及び凹部14との間よって把持される。この構成によれば、噛み合せを深くすることが可能であって、従来のグリッパと比較して小さな操作力でも、縫合針5を把持するのに必要な把持力を持ち合わせることができ、確実に縫合針5を把持することが可能である。よって、駆動部の駆動力を上げることなく、グリッパ10の形状改良のみで高い把持力を得ることができる。
【0032】
また、本実施形態のグリッパ10は、一方の基体11に形成された凸部13の頂部には凹凸部13aが設けられており、この凹凸部13aにより縫合針5を把持したときのスリップが効果的に防止される。また、一方の基体11の把持面11aに、両端部から中央部に向かって盛り上がるような凸部13を形成したことで、湾曲状の縫合針5の向きが常に規定されるため掴み違いが発生せず、作業性を向上できる。
【0033】
次に、上記グリッパの作用について説明する。
【0034】
腹腔鏡下手術において、患者の腹部に小さな孔がいくつかあけられ、その孔から体腔内に本体部35の長尺部材35bが挿入される。一方で、他の孔から縫合針5が把持された鉗子が挿入され、術者により操作部34が操作されることにより、グリッパ10が閉じられて他の孔から挿入される縫合針5が体腔内で把持される。この時、縫合針5は、上述したように、単に縫合針5を把持するだけでその向きを適正な状態で把持される。
【0035】
次に目的組織に対して穿刺する縫合針5の先端が直角に位置する姿勢となるようにその姿勢が操作された上で、グリッパ10の傾き角を調整するとともにグリッパ10を軸回りに回転操作し、組織に縫合針5の針先部分を穿刺した後、グリッパ10は外部へと取り出される。その後、他の鉗子等により、縫合針5を完全に貫通させて目的組織に縫合糸を通す。なお、通された縫合糸はその後結束される。
【0036】
このように本実施形態のグリッパ10は、上記構成により、縫合針5の掴み違いが発生せずに、確実に縫合針5を把持することができる。また、駆動部の出力を上げることなく、高い把持力を維持できる。
【0037】
なお、本発明は上記実施の形態に限定されるものではなく、本発明の要旨の範囲内で種々変更可能である。例えば、本実施形態のグリッパ10において、一方の基体11の凸部13は、頂部が先鋭状になるようにして左右両側にテーパ面を有して形成されているが、曲線状や階段状に形成しても構わない。この場合、他方の基体12の把持面12aには、当該凸部13の形状に対応して凹部14が形成される。また、例えば腹腔鏡下手術において、図9に示すように、上記実施形態で示した縫合針5よりも太い縫合針6が用いられる場合には、図10に示すように、他方の基体12の把持面12aの端部周囲に形成される凹凸部12bを、その凹部と凸部のピッチが広げられて形成されるようにすると良い。
【符号の説明】
【0038】
5 縫合針
10 グリッパ
11、12 基体
11a、12a 把持面
13 凸部
14 凹部
【技術分野】
【0001】
本発明は、外科手術等で用いられる縫合用の針(以下、「縫合針」と称する)を把持するためのグリッパに関し、特に、脳外科用又は腹腔鏡下手術に用いるのに好適なグリッパに関する。
【背景技術】
【0002】
近年、開腹手術に代わり、患者への負担を軽減するために非開腹で行う腹腔鏡下手術が注目されている。このような腹腔鏡下手術では、患者の腹部に小さな孔をいくつかあけ、それらの孔に内視鏡、鉗子等を挿入し、術者が内視鏡の映像をモニタで見ながら外科的処置を行う。
【0003】
このような腹腔鏡下手術において用いられるグリッパは、例えば、縫合針を把持し体腔内の目的組織に穿刺するのに用いられ、縫合時には、術者によって縫合針の先端が穿刺する組織と直角に位置する姿勢となるように縫合針の姿勢が操作される。
【0004】
従来のグリッパ100は、図11に示すように、一対の基体101、102が回転軸105を介して連結されており、基体101、102の後方が開閉操作されることにより、当該回転軸105を支点として前方が開閉動作する。縫合針は、当該開閉動作により、対向する基体101、102の前方に有する把持面103で把持される。この把持面103には、例えば、所定のスリットが格子状に形成されている。
【0005】
このようなグリッパは、例えば、術者が操作を行う操作部と、この操作部に接続され、患者の体腔内に挿入される挿入部を備えた本体部と、を備えるマニピュレータ装置に取り付けられる。このマニピュレータ装置では、術者による操作部の操作によって、本体部に設けられた駆動部が駆動する動力を伝達部材を介してグリッパに伝達し、当該グリッパの開閉動作が行われる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第4377827号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このようなグリッパは、すべりやすく、把持圧が低いなどの理由から高度な操作技術を必要とし、縫合針を腹腔内に落とす虞がある。
【0008】
また、縫合針の向きを適切な向きで把持する必要性があるものの、掴み違いなどを起こす場合がある。
【0009】
本発明は、このような問題の解消を一つの課題とし、その目的の一例は、確実且つ容易に縫合針を把持可能であって、操作性の良いグリッパを提供するものである。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載のグリッパは、縫合針を把持するグリッパであって、回転軸を介して連結される一対の基体を具備し、前記基体の一端は前記操作部として機能し、他端は前記一端の操作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とする。
【0011】
また、請求項2に記載のグリッパは、縫合針を把持するグリッパと、伝達部材を介して当該グリッパを開閉動作させる操作部と、を具備するマニピュレータ装置のグリッパであって、前記グリッパは、回転軸を介して連結される一対の基体を具備し、前記基体の一端は前記伝達部材に接続され、他端は前記伝達部材の動作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とする。
【0012】
また、請求項3に記載のグリッパは、請求項2に記載のグリッパにおいて、前記凸部の頂部と前記基体の把持面の両端部には凹凸部が形成されていることを特徴とする。
【発明の効果】
【0013】
本発明によれば、操作性が向上し、縫合針の掴み違いが発生せずに、確実且つ容易に縫合針を把持することができる。
【図面の簡単な説明】
【0014】
【図1】本実施形態のグリッパが取り付けられるマニピュレータ装置を示し、図1(a)は外観図、図1(b)はZ部分の拡大図である。
【図2】本実施形態のグリッパの外観図であり、図2(a)は閉動作時のグリッパの斜視図、図2(b)は開動作時のグリッパの斜視図である。
【図3】グリッパの平面図であり、図3(a)は閉動作時のグリッパの平面図、図3(b)は開動作時のグリッパの平面図である。
【図4】グリッパの一方の基体を示す斜視図である。
【図5】グリッパの他方の基体を示す斜視図である。
【図6】グリッパの構成を示し、図6(a)は平面図、図6(b)はA−A断面図である。
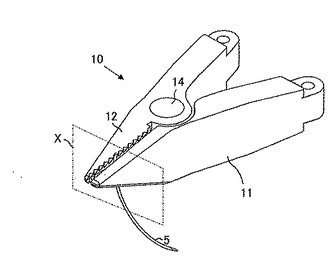
【図7】縫合針を把持した時のグリッパの状態図である。
【図8】図7のX部分の断面図である。
【図9】他のグリッパにおいて縫合針を把持した時の状態図である。
【図10】他のグリッパの外観を示す平面図である。
【図11】従来のグリッパの外観を示す斜視図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施形態について説明する。なお、以下に示すグリッパ10の開閉動作とは、グリッパ10を構成する双方の基体11、12の前方部が近接又は離れる方向に移動する動作をいう。
【0016】
本実施形態のグリッパ10は、例えば脳外科用手術に用いられ、縫合針5を把持する器具である。このグリッパ10はマニピュレータ装置30に取り付けられて用いられる。なお、マニピュレータ装置30は、公知技術であるため、詳細な説明は省略するものとする。
【0017】
マニピュレータ装置30は、図1に示すように、患者の体腔内に挿入される挿入部36を備えた本体部35と、挿入部36の先端に配置されるグリッパ10と、このグリッパ10を開閉動作するために術者が手動で操作を行う手動操作部32と、このグリッパ10を開閉動作するために術者が足で操作を行う足操作部39と、手動操作部32及び足操作部39の操作に基づいてグリッパ10の動作を制御する制御部38と、を備えている。なお、グリッパ10を取り替える場合には、グリッパ10を含む挿入部36全体が取り外されて、新たなグリッパ10が挿入部36全体とともに取り付けられる。
【0018】
本体部35は、駆動部(モータ類等)等を収容する収容体35aと、この駆動部の駆動力をグリッパ10に伝達する歯車群等を含む伝達部材39が収容された中空状の長尺部材35bと、を備えている。
【0019】
手動操作部32は、術者によって保持される略円筒状のグリップ33を備えている。このグリップ33には、グリッパ10の方向を操作するための操作デバイス34を備えている。
【0020】
操作デバイス34は、図1(b)の矢印e、f、gに示すように、グリッパ10を3つの自由度(ヨー、ロール、開閉)で動作させるための指令を行うものであって、例えば、図1に示すように、グリップ33の上端部に配置された横方向に回転可能な横方向操作ダイヤル34aと、グリップ33の上端部後方に配置された縦方向に回転可能な縦方向操作ダイヤル34bと、グリップ33の中央部前方に配置された操作トリガ34cと、操作トリガ34cの上部に配置された押しボタンスイッチ34dと、を備えており、各々は、術者によってグリップ33が保持された状態において操作可能な位置に配置されている。
【0021】
横方向操作ダイヤル34aは、図1(b)中の矢印eに示すように、ヨー軸を制御するものであって、グリッパ10を左右方向に動作させるための回転体であり、縦方向操舵ダイヤル34bは、図1(b)中の矢印fに示すように、ロール軸を制御するものであって、グリッパ10を回転動作させるための回転体である。また、操作トリガ34cは、図1(b)中の矢印gに示すように、グリッパ10を開閉動作させるためのスイッチであり、押しボタンスイッチ34dは、グリッパ10の動作の開始又は停止等を制御するためのスイッチである。
【0022】
なお、例えば横方向操作ダイヤル34aを回転させることで、グリッパ10が延出する方向に対して左右方向にグリッパ10を可変可能となっており、縦方向操作ダイヤル34bを回転させることで、グリッパ10が延出する方向と略同一軸回りに回転可能となっている。また、操作トリガ34cの挟持量によって、グリッパ10の開閉量を調整することが可能である。これら操作デバイス34の操作によって、グリッパ10を任意の姿勢へと誘導することが可能となっている。
【0023】
一方、足操作部39は、術者によって踏まれる左右のフットスイッチ39a、39bを備えている。このフットスイッチ39a、39bは、グリッパ10の開閉モードの切替、及びグリッパの軸の固定モードの切替動作をさせるための指令を行うものである。この開閉モードとは、例えば、グリッパ10を開いた状態から閉じる状態へ動作させるモードと、グリッパ10を閉じた状態から開いた状態へ動作させるモードと、を備え、右側のフットスイッチ39aを押すたびにこのモードが切り替わる。
【0024】
グリッパ10の軸の固定モードとは、例えば、操作トリガ34cの操作に関係なく、一時的にグリッパの開閉動作を固定するモードと、解除するモードと、を備え、左側のフットスイッチ39bを押すたびにこのモードが切り替わる。
【0025】
制御部38は、ユーザが操作するための操作ボタンを備えた筐体を有し、この筐体の上面には、手動操作部32及び足操作部39の操作によるグリッパ10の操作状態等を表示する表示部38aが設けられている。
【0026】
グリッパ10は、図2に示すように、一対の基体11、12が回転軸14を介して連結されており、基体11、12の後方が開閉操作されることにより、回転軸14を支点として前方が開閉動作する。基体11、12の後方は、伝達部材39に連結され、伝達部材39の動作にしたがってグリッパ10が上述したように動作する。
【0027】
このグリッパ10には、例えば、湾曲状の縫合用針5が把持される(図7参照)。具体的には、この縫合用針5は、一対の基体11、12の前方に有する互いに対向する面(以下、「把持面11a、12a」)において、グリッパ10の閉動作によって所定の挟持力にて把持される。
【0028】
図3及び図4に示すように、一方の基体11の把持面11aには、両端部から中央部に向かって盛り上がるように(突状に)形成された凸部13を有しており、この凸部13は、把持面11aの両端部から中央部に向かって傾斜するテーパ面を有しており、凸部13の頂部は先鋭状に形成されている。また、この凸部13の頂部には、鋸刃状の凹凸部13aがその軸線方向に連続状に並んで形成されている。
【0029】
一方、図5に示すように、他方の基体12の把持面12aには、グリッパ10の閉動作において、当該凸部13の周面に重なり合うように形成される凹部14を有し、その把持面12aの端部周囲には、鋸刃状の凹凸部12bが連続状に並んで配置されている。
【0030】
そして、グリッパ10の閉動作において、図6(b)に示すように、一方の基体11に形成された凸部13は、他方の基体12に形成された凹部14と重なり合うとともに、前記凸部13の頂部に形成された凹凸部13aが他方の基体12に形成された凹部14の頂部と接触する一方で、他方の基体12の把持面12aに有する凹凸部12bが、一方の基体11の把持面11bに接触するようになっている。
【0031】
このように構成されたグリッパ10には、図7に示すように、その閉動作によって湾曲状に形成された縫合針5が把持される。この場合、図8に示すように、縫合針5は、両方の基体11、12の把持面11a、12aの両端部とその中央部に形成された凸部13及び凹部14との間よって把持される。この構成によれば、噛み合せを深くすることが可能であって、従来のグリッパと比較して小さな操作力でも、縫合針5を把持するのに必要な把持力を持ち合わせることができ、確実に縫合針5を把持することが可能である。よって、駆動部の駆動力を上げることなく、グリッパ10の形状改良のみで高い把持力を得ることができる。
【0032】
また、本実施形態のグリッパ10は、一方の基体11に形成された凸部13の頂部には凹凸部13aが設けられており、この凹凸部13aにより縫合針5を把持したときのスリップが効果的に防止される。また、一方の基体11の把持面11aに、両端部から中央部に向かって盛り上がるような凸部13を形成したことで、湾曲状の縫合針5の向きが常に規定されるため掴み違いが発生せず、作業性を向上できる。
【0033】
次に、上記グリッパの作用について説明する。
【0034】
腹腔鏡下手術において、患者の腹部に小さな孔がいくつかあけられ、その孔から体腔内に本体部35の長尺部材35bが挿入される。一方で、他の孔から縫合針5が把持された鉗子が挿入され、術者により操作部34が操作されることにより、グリッパ10が閉じられて他の孔から挿入される縫合針5が体腔内で把持される。この時、縫合針5は、上述したように、単に縫合針5を把持するだけでその向きを適正な状態で把持される。
【0035】
次に目的組織に対して穿刺する縫合針5の先端が直角に位置する姿勢となるようにその姿勢が操作された上で、グリッパ10の傾き角を調整するとともにグリッパ10を軸回りに回転操作し、組織に縫合針5の針先部分を穿刺した後、グリッパ10は外部へと取り出される。その後、他の鉗子等により、縫合針5を完全に貫通させて目的組織に縫合糸を通す。なお、通された縫合糸はその後結束される。
【0036】
このように本実施形態のグリッパ10は、上記構成により、縫合針5の掴み違いが発生せずに、確実に縫合針5を把持することができる。また、駆動部の出力を上げることなく、高い把持力を維持できる。
【0037】
なお、本発明は上記実施の形態に限定されるものではなく、本発明の要旨の範囲内で種々変更可能である。例えば、本実施形態のグリッパ10において、一方の基体11の凸部13は、頂部が先鋭状になるようにして左右両側にテーパ面を有して形成されているが、曲線状や階段状に形成しても構わない。この場合、他方の基体12の把持面12aには、当該凸部13の形状に対応して凹部14が形成される。また、例えば腹腔鏡下手術において、図9に示すように、上記実施形態で示した縫合針5よりも太い縫合針6が用いられる場合には、図10に示すように、他方の基体12の把持面12aの端部周囲に形成される凹凸部12bを、その凹部と凸部のピッチが広げられて形成されるようにすると良い。
【符号の説明】
【0038】
5 縫合針
10 グリッパ
11、12 基体
11a、12a 把持面
13 凸部
14 凹部
【特許請求の範囲】
【請求項1】
縫合針を把持するグリッパであって、
回転軸を介して連結される一対の基体を具備し、
前記基体の一端は前記操作部として機能し、他端は前記一端の操作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、
一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とするグリッパ。
【請求項2】
縫合針を把持するグリッパと、
伝達部材を介して当該グリッパを開閉動作させる操作部と、
を具備するマニピュレータ装置のグリッパであって、
前記グリッパは、
回転軸を介して連結される一対の基体を具備し、
前記基体の一端は前記伝達部材に接続され、他端は前記伝達部材の動作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、
一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とするグリッパ。
【請求項3】
前記凸部の頂部と前記基体の把持面の両端部には凹凸部が形成されていることを特徴とする請求項2に記載のグリッパ。
【請求項1】
縫合針を把持するグリッパであって、
回転軸を介して連結される一対の基体を具備し、
前記基体の一端は前記操作部として機能し、他端は前記一端の操作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、
一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とするグリッパ。
【請求項2】
縫合針を把持するグリッパと、
伝達部材を介して当該グリッパを開閉動作させる操作部と、
を具備するマニピュレータ装置のグリッパであって、
前記グリッパは、
回転軸を介して連結される一対の基体を具備し、
前記基体の一端は前記伝達部材に接続され、他端は前記伝達部材の動作にしたがって前記回転軸を支点として開閉動作し、前記縫合針を把持する把持面を有しており、
一方の前記基体の把持面には中央部が盛り上がるように形成された凸部が形成され、他方の前記基体の把持面には当該凸部の周面に沿って重なり合う凹部が形成されていることを特徴とするグリッパ。
【請求項3】
前記凸部の頂部と前記基体の把持面の両端部には凹凸部が形成されていることを特徴とする請求項2に記載のグリッパ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−5706(P2012−5706A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−145488(P2010−145488)
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000193612)瑞穂医科工業株式会社 (53)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000193612)瑞穂医科工業株式会社 (53)
【Fターム(参考)】
[ Back to top ]