
ケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーン
【課題】ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつケーブルの巻き取り及び巻き出しを行わせることが可能なケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーンを提供する。
【解決手段】ケーブルリール5の制御装置20は、モータ5bによって発生させるトルクであるモータ発生トルク値とモータ5bによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいてケーブルに作用している張力である張力推定値を演算する張力演算手段21と、張力演算手段21で演算された張力推定値に基づいて、ケーブルに作用する張力を予め設定された張力設定値とするのにモータ5bで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段22とを備える。
【解決手段】ケーブルリール5の制御装置20は、モータ5bによって発生させるトルクであるモータ発生トルク値とモータ5bによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいてケーブルに作用している張力である張力推定値を演算する張力演算手段21と、張力演算手段21で演算された張力推定値に基づいて、ケーブルに作用する張力を予め設定された張力設定値とするのにモータ5bで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段22とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行車両に設けられて、外部との接続を行うケーブルの巻き取り、及び、巻き出しを行うケーブルリールを制御するケーブルリールの制御装置、ケーブルリールの制御方法、及び、制御装置を備えたタイヤ式クレーンに関する。
【背景技術】
【0002】
従来から、外部電源からの給電により所定のレーン内を走行するタイヤ式クレーンが知られている。より具体的には、タイヤ式クレーンには、外部電源と接続するための走行給電ケーブルと走行給電ケーブルの巻き取り、巻き出しを行うケーブルリールとが設けられている。そして、タイヤ式クレーンの移動に伴ってケーブルリールにより走行給電ケーブルを巻き取り、または、巻き出すことで、タイヤ式クレーンは、その位置に係らず走行給電ケーブルを介して外部給電から給電して、自走することが可能となっている(例えば、特許文献1参照)。ここで、ケーブルリールは、走行給電ケーブルを巻回するドラムと、ドラムを回転するモータとを備えており、モータによってドラムを回転駆動させることで、その回転方向により走行給電ケーブルを巻き取り、または、巻き出すことが可能となっている。
【0003】
ところで、上記のような走行給電ケーブルは、タイヤ式クレーンに設けられたケーブルリールと、外部電源との間に配設されており、必要以上の張力が作用してしまうと、外部電源に接続されたコネクタが外れてしまい、または、走行給電ケーブルやケーブルリール自体が損傷を受けてしまうおそれもある。一方、作用する張力が小さい、または、全く張力が作用しない状態であると、走行給電ケーブルは弛んでしまい、タイヤ式クレーンとの接触や混線の原因となってしまう。また、走行給電ケーブルに作用する張力は、モータの出力を一定としてもドラムに巻回されている走行給電ケーブルの巻取半径に比例して変化することとなる。このため、従来ケーブルリールでは、モータ制御装置により、走行給電ケーブルの巻取半径に比例して出力が変化するようにモータを駆動させて、ドラムによって巻き取り、及び、巻き出しを行っていた。
【特許文献1】特開2003−137493号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような制御装置では、単にケーブルの巻取半径に比例するようにモータから出力されるトルクを制御しているにすぎず、ケーブルに作用する張力は、様々な外乱が作用することによって予定する張力から変動してしまう。例えば、上記のようなタイヤ式クレーンなどの走行車両においては、常に一定の速度で走行するわけではなく、安定走行状態においても常に僅かでも速度が変化しており、これにより走行車両と外部とを接続する走行給電ケーブルなどのケーブルでは張力が変動してしまう問題があった。
【0005】
この発明は、上述した事情に鑑みてなされたものであって、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつケーブルの巻き取り及び巻き出しを行わせることが可能なケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーンを提供するものである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明は、走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御装置であって、前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算手段と、該張力演算手段で演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段とを備えることを特徴としている。
【0007】
また、本発明は、走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御方法であって、張力演算手段が前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算ステップと、モータトルク演算手段が、該張力演算ステップで演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算ステップとを備えることを特徴としている。
【0008】
この構成及び方法によれば、張力演算ステップとして、張力演算手段によって、モータ発生トルク値とドラム作動トルク値との差分に基づいて、張力推定値を演算する。ここで、モータ発生トルク値がモータによって発生させるトルクであるのに対して、ドラム作動トルク値が、モータによって実際にドラムを回動動作させているトルクである。また、実際に作用している張力の反力によってケーブルからドラムにトルクが作用し、これによりモータによってドラムに作用するトルクはロスしてドラムは回転動作を行っている。このため、両者の差分により、ケーブルに作用している張力を表す張力推定値を正確に演算することができる。そして、モータトルク演算ステップとして、モータトルク演算手段によって、演算された張力推定値に基づいて、ケーブルに作用する張力が張力設定値となるようにトルク指令値を演算し出力することで、外乱の影響を控除してケーブルの張力が張力設定値で安定するようにケーブルリールのモータを制御することができる。
【0009】
また、上記のケーブルリールの制御装置において、前記張力演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することがより好ましい。
【0010】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記張力演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することがより好ましい。
【0011】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段により、変動するケーブルの巻取半径を考慮して正確に張力推定値を演算することができる。
【0012】
また、上記のケーブルリールの制御装置において、前記張力演算手段は、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するモータ発生トルク演算部と、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算するドラム作動トルク演算部と、前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算する張力演算部とを有することがより好ましい。
【0013】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記張力演算手段が、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するとともに、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算し、求められた前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算することがより好ましい。
【0014】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のモータ発生トルク演算部によってモータに入力される入力信号に基づいてモータ発生トルク値を演算することができる。また、張力演算手段のドラム作動トルク演算部によって、モータから出力され検出された出力信号によってドラム作動トルク値を演算することができる。このため、張力演算手段の張力演算部では、モータ発生トルク演算部及びドラム作動トルク演算部による演算結果から張力推定値を演算することができる。
【0015】
さらに、上記のケーブルリールの制御装置において、前記張力演算手段の前記ドラム作動トルク演算部は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定されて前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することがより好ましい。
【0016】
さらに、上記のケーブルリールの制御方法において、前記張力演算ステップで、前記張力演算手段は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定しておいた前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することがより好ましい。
【0017】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のドラム作動トルク演算部により、予め設定された回転機構慣性モーメント値に基づいて演算することで、ドラムを含む回転機構の慣性モーメントを考慮して正確に張力推定値を演算することができる。
【0018】
また、上記のケーブルリールの制御装置において、前記張力演算手段の前記張力演算部は、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値が予め設定されているとともに、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することがより好ましい。
【0019】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値を予め設定しておいて、前記張力演算手段は、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することがより好ましい。
【0020】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段の張力演算部により、予め設定された回転抵抗分トルク値と取得した巻き情報とに基づき、モータ発生トルク値とドラム作動トルク値との差分に対して回転抵抗分トルク値を加算または減算することで、ドラムを含む回転機構の回転抵抗によるトルクを考慮して、正確に張力推定値を演算することができる。
【0021】
また、上記のケーブルリールの制御装置において、前記張力演算手段の前記モータ発生トルク演算部は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することがより好ましい。
【0022】
また、上記のケーブルリールの制御方法において、前記張力演算ステップで、前記張力演算手段は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することがより好ましい。
【0023】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のモータ発生トルク演算部により、入力信号としてトルク指令電流を取得するとともに、モータ温度値を取得し、これらに基づいて演算することで、モータの温度の影響を考慮して正確にモータ発生トルク値を演算することができる。
【0024】
また、上記のケーブルリールの制御装置において、前記モータトルク演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、前記張力設定値に該巻取半径を乗算して基準トルク値を演算する基準トルク演算部と、前記巻取半径を取得し、該巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算するトルク補正値演算部と、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めるトルク指令値演算部とを有することがより好ましい。
【0025】
また、上記のケーブルリールの制御方法において、前記モータトルク演算ステップでは、前記モータトルク演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得して前記張力設定値に該巻取半径を乗算して基準トルク値を演算するとともに、前記巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算し、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めることがより好ましい。
【0026】
この構成及び方法によれば、モータトルク演算ステップにおいて、モータトルク演算手段の基準トルク演算部によって、張力設定値に、取得した巻取半径を乗算することで、基準トルク値として、現在の巻取半径に応じて張力設定値となる張力を発生するためにドラムに作用させることが必要なトルクを演算することができる。また、モータトルク演算手段のトルク補正値演算部によって、巻取半径、張力推定値、及び、張力設定値から、予定されるケーブルの張力である張力設定値と、現在の実際の張力として演算された張力推定値との差異に基づくトルク補正値を、現在の巻取半径を考慮して求めることができる。そして、モータトルク演算手段のトルク指令値演算部により、基準トルク値からトルク補正値を控除して求めることで、外乱の影響を考慮して、ケーブルの張力を張力設定値とするようにケーブルリールのモータを駆動させるトルク指令値を正確に求めることができる。
【0027】
また、本発明のタイヤ式クレーンは、上記のケーブルリールの制御装置と、該制御装置によって前記モータが制御されるケーブルリールと、前記制御装置及び前記ケーブルリールが設けられ、タイヤによる走行手段によって走行可能なクレーン本体とを備えることを特徴としている。
【0028】
この構成によれば、制御装置による制御のもと、タイヤによる走行手段によって走行するクレーン本体に対して外部と接続されたケーブルを、張力が張力設定値となるように安定させた状態で、ケーブルリールにより巻き取り、また、巻き出すことができる。
【発明の効果】
【0029】
本発明のケーブルリールの制御装置では、張力演算手段とモータトルク演算手段とを備えることで、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつ、ケーブルの巻き取り及び巻き出しを行わせることができる。
また、本発明のケーブルリールの制御方法では、張力演算ステップとモータトルク演算ステップとを行うことで、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつ、ケーブルの巻き取り及び巻き出しを行うことができる。
本発明のタイヤ式クレーンでは、上記制御装置を備えることで、ケーブルが引っ張られて外部との接続が外れたり、弛んでクレーン本体との接触や混線等が発生してしまうことなく、ケーブルにより外部と接続された状態で好適にクレーン本体を走行させることができる。
【発明を実施するための最良の形態】
【0030】
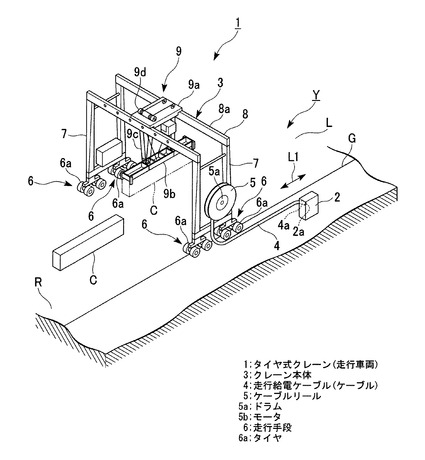
以下、本発明に係るタイヤ式クレーンの実施形態を、図1〜図6を参照して説明する。図1は、本発明に係るタイヤ式クレーン(Rubber Tired Gantry Crane)の全体図である。
【0031】
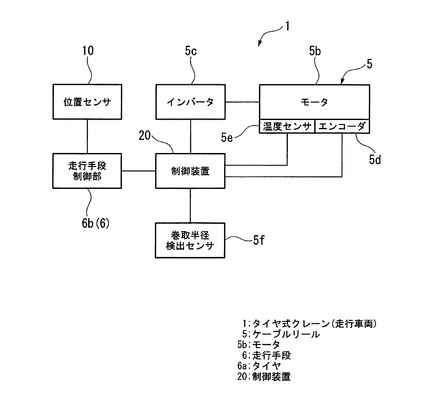
図1に示すように、本実施形態のタイヤ式クレーン1は、コンテナヤードY内の路面R上に設置された走行レーンLに外部電源2が設けられていて、該外部電源2からの給電を受けて、走行車両としてタイヤ6aによる走行手段6によって走行レーンL上を自走しつつ、コンテナCの積み下ろしを行うものである。より具体的には、タイヤ式クレーン1は、タイヤ6aにより路面R上を走行するクレーン本体3と、該クレーン本体3から延び外部電源2に接続されるケーブルである走行給電ケーブル4と、クレーン本体3に設けられて走行給電ケーブル4の巻き取り及び巻き出しを行うケーブルリール5と、ケーブルリール5を制御する制御装置20(図2参照)とを備える。
【0032】
クレーン本体3は、タイヤ式の上記走行手段6と、互いに略平行に立設されて走行手段6によりそれぞれ走行可能な一対の脚部7と、該脚部7間に上部で架設された梁部8と、該梁部8に吊設された吊下機構9とを備えている。図1及び図2に示すように、走行手段6は、脚部7に垂直軸を中心として回転自在に支持されたタイヤ6aと、タイヤ6aの方向を変更させる方向調整機構(不図示)と、タイヤ6aを駆動させる車輪駆動モータ(不図示)と、これら方向調整機構及び車輪駆動モータを制御する走行手段制御部6bとを備える。走行手段6の走行手段制御部6bでは、各走行レーンLに沿って配設された地上ガイドラインGとのズレ量を検出するRTG蛇行量検出センサ(不図示)からの検出信号に基づき、方向調整機構に対して走行車輪の方向を切り替えさせ、該地上ガイドラインGに沿うように、車輪駆動モータに対してタイヤ6aを、走行レーンLに沿うレーン内走行方向L1に横走行させる制御を行う。また、クレーン本体3には、位置センサ10が設けられ、レーン内走行方向L1のクレーン本体3の位置が検出され、走行手段制御部6bに入力されている。そして、走行手段制御部6bは、クレーン本体3のレーン内走行方向L1の位置を表す位置データDl、及び、クレーン本体3の走行方向を表す走行データDdを制御装置20に出力している。
【0033】
また、図1に示すように、一対の脚部7は、梁部8及び吊下機構9を支持している。梁部8は、吊下機構9を吊り下げるように支持している。そして、梁部8には、該梁部8の長手方向に沿って吊下機構9が走行可能なように、ガイドレール8aが設けられている。吊下機構9は、図示しない給電部より受電することにより、コンテナCを積み降ろしするように作動する。より具体的に、吊下機構9は、梁部8のガイドレール8aに沿って走行可能トロリ9aと、コンテナCを把持するスプレッダー9bと、トロリ9aからスプレッダー9bを吊り下げている吊下ロープ9cと、該吊下ロープ9cの巻上げ及び巻出しを行う巻上機9dと、トロリ9a、スプレッダー9b及び巻上機9dの作動を制御する吊下機構制御部(図示せず)とを備えている。
【0034】
また、走行給電ケーブル4は、先端に受電側コネクタ4aが設けられて、外部電源2の給電側コネクタ2aと接続されており、これにより外部電源2からの給電を行うことが可能となっている。図1及び図2に示すように、走行給電ケーブル4を収容するケーブルリール5は、一方の脚部7の外側面に設けられている。ケーブルリール5は、略水平な軸心を有して回転可能で走行給電ケーブル4が巻回されたドラム5aと、出力軸が減速機(図示せず)を介してドラム5aに接続され、該ドラム5aを回転させるモータ5bとを有している。モータ5bは、インバータ5cを介して制御装置20と接続されており、これにより制御装置20から出力されたトルク指令値Ctをトルク指令電流Itに変換して、モータ5bに出力することが可能となっている。そして、制御装置20による制御のもと、モータ5bを駆動させてドラム5aに所定のトルクを作用させることにより、クレーン本体3の走行に伴って、走行給電ケーブル4をドラム5aに巻き取り、または、巻き出すことが可能となっている。なお、モータ5bに入力されているトルク指令電流Itは、制御装置20にも入力されている。また、モータ5bには、モータ5bの出力軸の回転速度ωmを検出するエンコーダ5dと、モータ5b内部の温度を検出する温度センサ5eが設けられている。そして、エンコーダ5dから出力されてモータ5bの回転速度ωmを表すPG信号と、モータ5b内部の温度を表すモータ温度値Mtは、制御装置20に入力されている。ドラム5aには、巻回されている走行給電ケーブル4の外径である巻取半径Rcを検出する巻取半径検出センサ5fが設けられており、これにより検出された巻取半径Rcは、制御装置20に入力されている。
【0035】
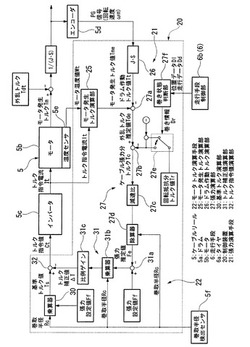
次に、制御装置20の詳細について説明する。図3に示すように、制御装置20は、走行給電ケーブル4に作用している張力を表す張力推定値Feを演算する張力演算手段21と、張力演算手段21で演算された張力推定値Feに基づいて、走行給電ケーブル4に作用する張力を予め設定された張力設定値Ffとするのにモータ5bで発生すべきトルクであるトルク指令値Ctを演算し、インバータ5cを介してモータ5bに出力するモータトルク演算手段22とを備える。張力演算手段21は、モータ5bに入力される入力信号を取得し、入力信号によってモータ5bに発生させることになるトルクであるモータ発生トルク値Tmeを演算するモータ発生トルク演算部25と、モータ5bから出力された出力信号を取得し、モータ5bの出力によって実際にドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを演算するドラム作動トルク演算部26と、モータ発生トルク値Tme及びドラム作動トルク値Ttに基づいて張力推定値Feを演算する張力演算部27とを有する。
【0036】
モータ発生トルク演算部25には、上記入力信号として、モータ5bに入力されるトルク指令電流Itが入力されていている。また、モータ発生トルク演算部25には、モータ5bの温度センサ5eからモータ温度値Mtが入力されている。そして、モータ発生トルク演算部25は、図示しないメモリに記憶され、モータ5bの温度とモータ5bの入出力との関係を表すテーブルを参照して、取得したトルク指令電流Itとモータ温度値Mtとに基づいて、当該トルク指令電流Itによってモータ5bから出力されることになるトルクであるモータ発生トルク値Tmeを演算することが可能となっている。
【0037】
また、ドラム作動トルク演算部26には、上記出力信号として、エンコーダ5dからのPG信号(回転速度ωm)が入力されている。また、図示しないメモリには、ケーブルリール5のドラム5aを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値Jが記憶されている。そして、ドラム作動トルク演算部26は、図示しないメモリを参照して、入力されたPG信号から得られるモータ5bの回転速度ωmと回転機構慣性モーメント値Jとの積を微分することで、モータ5bの出力によって実際にドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを求めている。なお、図3において、ドラム作動トルク演算部26を示すブロック内の符号Sは、ラプラス変換子を表している。
【0038】
また、張力演算部27は、モータ発生トルク演算部25で演算されたモータ発生トルク値Tmeと、ドラム作動トルク演算部26で演算されたドラム作動トルク値Ttとの差分を求める第一の減算器27aと、第一の減算器27aの演算結果と予め設定されている回転抵抗分トルク値Trとの差分を求める第二の減算器27bと、第二の減算器27bでの減算結果にモータ5bの減速機構の減速比を乗ずる乗算器27cと、乗算器27cの演算結果を巻取半径検出センサ5fから入力された巻取半径Rcで除する除算器27dとを有する。第一の減算器27aでは、モータ5bで発生させるべきトルクと、結果としてモータ5bによって作動したドラム5aに作用しているトルクとの差分を求めており、これにより外乱によるロス分を表す外乱トルク推定値Tdeを演算している。また、回転抵抗分トルク値Trは、ドラム5a及び減速機を含む回転機構の回転抵抗によるトルクのロス分を表しており、図示しないメモリに記憶されている。
【0039】
また、第二の減算器27bでは、外乱トルク推定値Tdeから回転抵抗分トルク値Trを控除することにより、走行給電ケーブル4に作用する張力の反力によってドラム5aに作用するトルクであるケーブル張力分トルク値Tcを演算している。ここで、第二の減算器27bには、切換器27eが接続されているとともに、切換器27eには巻き状態判断部27fが接続されている。巻き状態判断部27fでは、走行手段6の走行手段制御部6bから位置データDl及び走行データDdが入力されている。そして、巻き状態判断部27fでは、位置データDlと走行データDdとに基づいて、ケーブルリール5のドラム5aが走行給電ケーブル4を巻き取っている巻き取り状態か、巻き出している巻き出し状態かを判断し、これを巻き情報Drとして切換器27eに出力している。より具体的には、巻き状態判断部27fでは、位置データDlに基づいてクレーン本体3が走行レーンLにおいて、レーン内走行方向L1に沿って外部電源2と正対する位置を原点としていずれの側に位置するかを判断している。そして、巻き情報判断部27fは、当該判断結果と、走行データDdから得られる走行方向から、クレーン本体3が外部電源2に近づく方向に移動していると判断する場合には、走行給電ケーブル4をケーブルリール5で巻き取る巻き取り状態と判断し、遠ざかる方向に移動していると判断する場合には、走行給電ケーブル4をケーブルリール5から巻き出す巻き出し状態と判断している。
【0040】
そして、切換器27eでは、巻き情報Drに基づいて、巻き取り時には、図示しないメモリを参照して取得した回転抵抗分トルク値Trをそのまま第二の減算器27bに入力し、これにより第二の減算器27bでは、外乱トルク推定値Tdeから回転抵抗分トルク値Trを減じてケーブル張力分トルク値Tcとして出力することとなる。一方、巻き出し時には、切換器27eでは、回路の切換えを行って、回転抵抗分トルク値Trに<−1>を乗じさせて、第二の減算器27bに入力し、これにより第二の減算器27bでは、外乱トルク推定値Tdeに回転抵抗分トルク値Trを加えてケーブル張力分トルク値Tcとして出力することとなる。そして、張力演算手段27では、第二の減算器27bによって演算されたケーブル張力分トルク値Tcに乗算器27cで減速比を乗算した結果を、除算器27dにおいて巻取半径Rcで除する。これにより現在の巻取半径Rcにおいてケーブル張力分トルク値Tcと対応して走行給電ケーブル4に作用する張力を表す張力推定値Feが演算され、出力されている。
【0041】
また、張力推定値Feからトルク指令値Ctを演算するモータトルク演算手段22は、張力設定値Ffに対応してモータ5bとして発生させるべきトルクの基準となる基準トルク値Tsを演算する基準トルク演算部30と、張力推定値Feに基づいて基準トルク値Tsの補正すべき量を表すトルク補正値ΔTを演算するトルク補正値演算部31と、基準トルク値Tsからトルク補正値ΔTを控除してトルク指令値Ctを求めるトルク指令値演算部32とを有する。張力設定値Ffは、図示しないメモリに記憶されており、張力が大きくなって走行給電ケーブル4が損傷し、若しくは、走行給電ケーブル4の外部電源2との接続がはずれてしまうことがなく、また、張力が小さくなって弛みが生じてしまわない大きさに設定されている。そして、基準トルク演算部30では、図示しないメモリから張力設定値Ffを参照するとともに、入力される巻取半径Rcを取得し、両者を乗ずることによって基準トルク値Tsを求めている。
【0042】
また、トルク補正値演算部31は、メモリから参照した張力設定値Ffと張力演算手段21で演算された張力推定値Feとの差分を求める減算器31aと、減算器31aによる演算結果に、取得した巻取半径Rcを乗じる第一の乗算器31bと、第一の乗算器31bによる演算結果に比例ゲインを乗じてトルク補正値ΔTとして出力する第二の乗算器31cとを有する。減算器31aでは、張力設定値Ffと張力推定値Feとの差分を求めることにより、予定されている走行給電ケーブル4の張力と、モータ5bを駆動させて実際に作用したと推定される張力との誤差が求められる。そして、第一の乗算器31bでは、現在の巻取半径Rcで当該誤差分の張力によって生じるトルクを求め、これに第二の乗算器31cで比例ゲインを乗じた値をトルク補正値ΔTとしている。そして、トルク指令値演算部32では、基準トルク値Tsからトルク補正値ΔTを減じて、トルク指令値Ctを求めてモータ5bに出力している。
【0043】
以上のような構成によって、タイヤ式クレーン1の走行に伴って、ケーブルリール5によって所定の張力を与えつつ走行給電ケーブル4の巻き取り、及び、巻き出しを行う際の制御装置20の制御手順の詳細について図3に基づいて説明する。図3に示すように、タイヤ式クレーン1の走行に伴ってケーブルリール5のモータ5bが駆動すると、モータ5bからは張力設定値Ffと対応した所定のモータ発生トルクTmが出力される。そして、走行給電ケーブル4を巻回するドラム5aには、モータ5bからのモータ発生トルクTmからロス分となる外乱トルクTdtが控除されたトルクが作用することとなる。このため、ドラム5aは、作用するトルクと、ドラム5aを含む回転機構全体の慣性モーメントとに応じた回転速度ωmで回転し、走行給電ケーブル4に張力を作用させながら、巻き取り、または、巻き出しを行うこととなる。
【0044】
なお、外乱トルクTdtとは、モータ5bの出力軸よりもドラム5a側で、さらに、走行給電ケーブル4側から、それぞれドラム5aに作用するトルクを合成したものを意味している。前者のトルクとしては、ドラム5aやモータ5bの減速機などを含むモータ5bの出力軸よりドラム5a側の回転機構全体の回転抵抗によるトルクがある。また、後者としては、走行給電ケーブル4に作用する張力の反力によるトルクがある。走行給電ケーブル4の張力は、ドラム5aに作用しているトルク、ドラム5aにおける走行給電ケーブル4の巻取半径の変化によって変動するのみならず、タイヤ式クレーン1が外部電源2に対していずれの方向に走行しているか、また、定速走行中なのか、若しくは加減速中なのかなどによっても変動する。
【0045】
そして、上記のとおりモータ5bを駆動して走行給電ケーブル4の巻き取りまたは巻き出しを行う際に、制御装置20の張力演算手段21において、ドラム作動トルク演算部26にはエンコーダ5dから回転速度ωmが順次入力され、さらに、モータ発生トルク演算部25にはインバータ5cからトルク指令電流Itが、また、温度センサ5eからモータ温度値Mtが順次入力されている。そして、制御装置20は、まず、張力演算ステップとして、張力演算手段21によって現在走行給電ケーブル4に作用している張力である張力推定値Feを演算する。すなわち、モータ発生トルク演算部25では、入力されたトルク指令電流Itから、図示しないメモリに記憶されているテーブルを参照してモータ発生トルク値Tmを演算する。この際、モータ温度値Mtを参照し、モータ発生トルク値Tmeを決定している。モータ5bの出力トルクは、入力のトルク指令電流Itに対して温度が高いと大きくなり、また、温度が低くなると小さくなるが、モータ温度値Mtを参照することで、温度の影響を考慮して入力信号であるトルク指令電流Itに対して正確にモータ5bの出力であるモータ発生トルク値Tmを演算することができる。また、ドラム作動トルク演算部26では、入力されたモータ5bの出力信号である回転速度ωmから、ドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを演算する。この際予め設定された回転機構慣性モーメント値Jを用いることで、ドラム5aを含む回転機構の慣性モーメントを考慮して正確にドラム作動トルク値Ttを求めることができる。
【0046】
次に、第一の減算器27aで、モータ発生トルク値Tmeからドラム作動トルク値Ttを減じることで、モータ5bによってドラム5aに入力したトルクと、実際のドラム5aが回転動作したトルクの差、すなわち、外乱によるロス分となる外乱トルク推定値Tdeを求めることができる。次に、第二の減算器27bで、図示しないメモリから回転抵抗分トルク値Trを参照して、演算された外乱トルク推定値Tdeに対して回転抵抗分トルク値Trを加算または減算してケーブル張力分トルク値Tcを求める。ここで、切換器27e及び巻き情報判断部27fにより、ケーブルリール5で走行給電ケーブル4を巻き取っている時には、回転抵抗分トルク値Trを加算することとなり、これにより外乱トルクにおいて、ドラム5aの回転抵抗によるトルクの影響を控除して、走行給電ケーブル4に作用する張力の反力によるトルクを正確に求めることができる。また、切換器27e及び巻き情報判断部27fにより、ケーブルリール5で走行給電ケーブル4を巻き出している時には、回転抵抗分トルク値Trを減算することとなり、これにより外乱トルクにおいて、ドラム5aの回転抵抗によるトルクの影響を控除して、走行給電ケーブル4に作用する張力の反力によるトルクを正確に求めることができる。そして、求めたケーブル張力分トルクTcに対して、乗算器27cが減速比を乗じ、さらに除算器27dが、その演算結果を巻取半径検出センサ5fから取得した巻取半径Rcで除することにより、モータ5bの減速比、並びに、変動する巻取半径Rcを考慮して、現在走行給電ケーブル4に作用している張力を表す張力推定値Feを正確に演算することができる。
【0047】
次に、制御装置20は、モータトルク演算ステップとして、モータトルク演算手段22によって張力演算ステップで演算された張力推定値Feに基づいて、走行給電ケーブル4に作用する張力を予め設定された張力設定値Ffとするのにモータ5bで発生すべきトルクであるトルク指令値Ctを演算し、出力する。まず、基準トルク演算部30は、図示しないメモリに記憶された張力設定値Ffを参照するとともに、巻取半径検出センサ5fから巻取半径Rcを取得し、これらから基準トルク値Tsを求める。次に、トルク補正値演算部31は、張力演算手段21で演算された張力推定値Feからトルク補正値ΔTを求める。すなわち、まず、減算器31aで張力設定値Ffと張力推定値Feとの差分、すなわち予定されている張力と実際に作用している張力との誤差を求める。そして、第一の乗算器31bで当該差分に巻取半径検出センサ5fから取得した巻取半径Rcを乗ずることで、現在の巻取半径を考慮してトルク補正値ΔTを求めることができる。そして、トルク指令値演算部32で、基準トルク値Tsからトルク補正値ΔTを控除してトルク指令値Ctとすることで、予定されている張力と実際に作用している張力との誤差を考慮して、走行給電ケーブル4に作用する張力が張力設置値Ffとなるトルクを発生させるようなトルク指令値Ctを出力することができる。
【0048】
以上のように、本実施形態のケーブルリール5の制御装置20では、張力演算手段21とモータトルク演算手段22とを備えることで、ケーブルリール5によって走行するタイヤ付きクレーン1と外部との間で、外乱の影響を控除して作用する張力を安定させつつ、走行給電ケーブル4の巻き取り及び巻き出しを行わせることができる。特に、本実施形態の制御装置20では、ケーブルリール5の巻取半径、ドラム5aを含む回転機構の慣性モーメント及び回転抵抗、ケーブルリール5の巻き状態、並びに、モータ5dの温度状態を考慮して張力推定値Feを演算し、これに基づきトルク指令値Ctを演算することで、より正確に外乱の影響を控除して走行給電ケーブル4に作用する張力の安定を図ることができる。その一方で、制御装置20では、モータ5dの入出力信号、モータ5dの温度情報、ケーブルリール5の巻取半径及び巻き情報と最小限の項目を変数として取得し、また、張力設定値Ff、ドラム5aを含む回転機構の慣性モーメント及び回転抵抗と、最小限の定数を初期設定するだけで走行給電ケーブル4に作用する張力を演算し、トルク指令値Ctを決定するので、演算負荷を最小限に抑えることができる。
【0049】
なお、本実施形態では、ケーブルリール5及び制御装置20をタイヤ式クレーン1に搭載した例として説明しているが、これに限るものではなく、様々な走行車両に適用可能であり、当然にレール上を走行する門型クレーンなどにも適用可能である。しかしながら、上記のように外乱の影響を控除して走行給電ケーブル4の巻き取り及び巻き出しを行わせることができる点で、走行速度の変動や蛇行による張力変動が大きいタイヤ式クレーンにおいて、より有効である。
【0050】
また、本実施形態では、張力演算手段21では、モータ5bの入力信号として、トルク指令電流Itを取得し、また、出力信号として回転速度ωmを取得するものとしたが、これに限るものではない。例えば入力信号としては、インバータ5cで変換される前のトルク指令値Ctを取得し、これに基づいてモータ発生トルク値Tmeを演算するものとしても良い。また、張力演算手段21では、回転抵抗分トルク値Trの加減算を第一の減算器27aでの演算結果に対して行うものとしたが、これに限るものではなく、モータ発生トルク値Tmeに対して加算または減算を行い、あるいは、ドラム作動トルク値Ttに対して減算または加算を行うものとしても良い。また、巻き状態判断部27fでは、走行手段制御部6bから入力された信号に基づいてケーブルリール5の巻き状態を判断し、これに基づいて回転抵抗分トルク値Trを加算するか、減算するかの切換えを行うものとしたが、これに限るものではない。すなわち、巻き状態判断部27fでは、外部の各種センサから直接情報を取得して、これに基づいて巻き状態を判断しても良い。あるいは、エンコーダ5dから出力される回転速度に基づいて、巻き状態を判断しても良い。また、巻取半径5fは、外部の巻取半径検出センサ5fから入力により取得されるものとしたが、これに限るものではなく、例えば、エンコーダ5dから出力される回転数を積算することで、巻き状態を判断するものとしても良い。
【0051】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施形態のタイヤ式クレーンの全体を示す斜視図である。
【図2】本発明の実施形態のタイヤ式クレーンのブロック図である。
【図3】本発明の実施形態のタイヤ式クレーンにおいて、制御装置の制御ロジックの詳細を示すブロック図である。
【符号の説明】
【0053】
1 タイヤ式クレーン(走行車両)
3 クレーン本体
4 走行給電ケーブル(ケーブル)
5 ケーブルリール
6 走行手段
6a タイヤ
5a ドラム
5b モータ
20 制御装置
21 張力演算手段
22 モータトルク演算手段
25 モータ発生トルク演算部
26 ドラム作動トルク演算部
27 張力演算部
30 基準トルク演算部
31 トルク補正値演算部
32 トルク指令値演算部
【技術分野】
【0001】
本発明は、走行車両に設けられて、外部との接続を行うケーブルの巻き取り、及び、巻き出しを行うケーブルリールを制御するケーブルリールの制御装置、ケーブルリールの制御方法、及び、制御装置を備えたタイヤ式クレーンに関する。
【背景技術】
【0002】
従来から、外部電源からの給電により所定のレーン内を走行するタイヤ式クレーンが知られている。より具体的には、タイヤ式クレーンには、外部電源と接続するための走行給電ケーブルと走行給電ケーブルの巻き取り、巻き出しを行うケーブルリールとが設けられている。そして、タイヤ式クレーンの移動に伴ってケーブルリールにより走行給電ケーブルを巻き取り、または、巻き出すことで、タイヤ式クレーンは、その位置に係らず走行給電ケーブルを介して外部給電から給電して、自走することが可能となっている(例えば、特許文献1参照)。ここで、ケーブルリールは、走行給電ケーブルを巻回するドラムと、ドラムを回転するモータとを備えており、モータによってドラムを回転駆動させることで、その回転方向により走行給電ケーブルを巻き取り、または、巻き出すことが可能となっている。
【0003】
ところで、上記のような走行給電ケーブルは、タイヤ式クレーンに設けられたケーブルリールと、外部電源との間に配設されており、必要以上の張力が作用してしまうと、外部電源に接続されたコネクタが外れてしまい、または、走行給電ケーブルやケーブルリール自体が損傷を受けてしまうおそれもある。一方、作用する張力が小さい、または、全く張力が作用しない状態であると、走行給電ケーブルは弛んでしまい、タイヤ式クレーンとの接触や混線の原因となってしまう。また、走行給電ケーブルに作用する張力は、モータの出力を一定としてもドラムに巻回されている走行給電ケーブルの巻取半径に比例して変化することとなる。このため、従来ケーブルリールでは、モータ制御装置により、走行給電ケーブルの巻取半径に比例して出力が変化するようにモータを駆動させて、ドラムによって巻き取り、及び、巻き出しを行っていた。
【特許文献1】特開2003−137493号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような制御装置では、単にケーブルの巻取半径に比例するようにモータから出力されるトルクを制御しているにすぎず、ケーブルに作用する張力は、様々な外乱が作用することによって予定する張力から変動してしまう。例えば、上記のようなタイヤ式クレーンなどの走行車両においては、常に一定の速度で走行するわけではなく、安定走行状態においても常に僅かでも速度が変化しており、これにより走行車両と外部とを接続する走行給電ケーブルなどのケーブルでは張力が変動してしまう問題があった。
【0005】
この発明は、上述した事情に鑑みてなされたものであって、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつケーブルの巻き取り及び巻き出しを行わせることが可能なケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーンを提供するものである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明は、走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御装置であって、前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算手段と、該張力演算手段で演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段とを備えることを特徴としている。
【0007】
また、本発明は、走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御方法であって、張力演算手段が前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算ステップと、モータトルク演算手段が、該張力演算ステップで演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算ステップとを備えることを特徴としている。
【0008】
この構成及び方法によれば、張力演算ステップとして、張力演算手段によって、モータ発生トルク値とドラム作動トルク値との差分に基づいて、張力推定値を演算する。ここで、モータ発生トルク値がモータによって発生させるトルクであるのに対して、ドラム作動トルク値が、モータによって実際にドラムを回動動作させているトルクである。また、実際に作用している張力の反力によってケーブルからドラムにトルクが作用し、これによりモータによってドラムに作用するトルクはロスしてドラムは回転動作を行っている。このため、両者の差分により、ケーブルに作用している張力を表す張力推定値を正確に演算することができる。そして、モータトルク演算ステップとして、モータトルク演算手段によって、演算された張力推定値に基づいて、ケーブルに作用する張力が張力設定値となるようにトルク指令値を演算し出力することで、外乱の影響を控除してケーブルの張力が張力設定値で安定するようにケーブルリールのモータを制御することができる。
【0009】
また、上記のケーブルリールの制御装置において、前記張力演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することがより好ましい。
【0010】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記張力演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することがより好ましい。
【0011】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段により、変動するケーブルの巻取半径を考慮して正確に張力推定値を演算することができる。
【0012】
また、上記のケーブルリールの制御装置において、前記張力演算手段は、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するモータ発生トルク演算部と、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算するドラム作動トルク演算部と、前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算する張力演算部とを有することがより好ましい。
【0013】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記張力演算手段が、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するとともに、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算し、求められた前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算することがより好ましい。
【0014】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のモータ発生トルク演算部によってモータに入力される入力信号に基づいてモータ発生トルク値を演算することができる。また、張力演算手段のドラム作動トルク演算部によって、モータから出力され検出された出力信号によってドラム作動トルク値を演算することができる。このため、張力演算手段の張力演算部では、モータ発生トルク演算部及びドラム作動トルク演算部による演算結果から張力推定値を演算することができる。
【0015】
さらに、上記のケーブルリールの制御装置において、前記張力演算手段の前記ドラム作動トルク演算部は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定されて前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することがより好ましい。
【0016】
さらに、上記のケーブルリールの制御方法において、前記張力演算ステップで、前記張力演算手段は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定しておいた前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することがより好ましい。
【0017】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のドラム作動トルク演算部により、予め設定された回転機構慣性モーメント値に基づいて演算することで、ドラムを含む回転機構の慣性モーメントを考慮して正確に張力推定値を演算することができる。
【0018】
また、上記のケーブルリールの制御装置において、前記張力演算手段の前記張力演算部は、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値が予め設定されているとともに、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することがより好ましい。
【0019】
また、上記のケーブルリールの制御方法において、前記張力演算ステップでは、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値を予め設定しておいて、前記張力演算手段は、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することがより好ましい。
【0020】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段の張力演算部により、予め設定された回転抵抗分トルク値と取得した巻き情報とに基づき、モータ発生トルク値とドラム作動トルク値との差分に対して回転抵抗分トルク値を加算または減算することで、ドラムを含む回転機構の回転抵抗によるトルクを考慮して、正確に張力推定値を演算することができる。
【0021】
また、上記のケーブルリールの制御装置において、前記張力演算手段の前記モータ発生トルク演算部は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することがより好ましい。
【0022】
また、上記のケーブルリールの制御方法において、前記張力演算ステップで、前記張力演算手段は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することがより好ましい。
【0023】
この構成及び方法によれば、張力演算ステップにおいて、張力演算手段のモータ発生トルク演算部により、入力信号としてトルク指令電流を取得するとともに、モータ温度値を取得し、これらに基づいて演算することで、モータの温度の影響を考慮して正確にモータ発生トルク値を演算することができる。
【0024】
また、上記のケーブルリールの制御装置において、前記モータトルク演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、前記張力設定値に該巻取半径を乗算して基準トルク値を演算する基準トルク演算部と、前記巻取半径を取得し、該巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算するトルク補正値演算部と、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めるトルク指令値演算部とを有することがより好ましい。
【0025】
また、上記のケーブルリールの制御方法において、前記モータトルク演算ステップでは、前記モータトルク演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得して前記張力設定値に該巻取半径を乗算して基準トルク値を演算するとともに、前記巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算し、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めることがより好ましい。
【0026】
この構成及び方法によれば、モータトルク演算ステップにおいて、モータトルク演算手段の基準トルク演算部によって、張力設定値に、取得した巻取半径を乗算することで、基準トルク値として、現在の巻取半径に応じて張力設定値となる張力を発生するためにドラムに作用させることが必要なトルクを演算することができる。また、モータトルク演算手段のトルク補正値演算部によって、巻取半径、張力推定値、及び、張力設定値から、予定されるケーブルの張力である張力設定値と、現在の実際の張力として演算された張力推定値との差異に基づくトルク補正値を、現在の巻取半径を考慮して求めることができる。そして、モータトルク演算手段のトルク指令値演算部により、基準トルク値からトルク補正値を控除して求めることで、外乱の影響を考慮して、ケーブルの張力を張力設定値とするようにケーブルリールのモータを駆動させるトルク指令値を正確に求めることができる。
【0027】
また、本発明のタイヤ式クレーンは、上記のケーブルリールの制御装置と、該制御装置によって前記モータが制御されるケーブルリールと、前記制御装置及び前記ケーブルリールが設けられ、タイヤによる走行手段によって走行可能なクレーン本体とを備えることを特徴としている。
【0028】
この構成によれば、制御装置による制御のもと、タイヤによる走行手段によって走行するクレーン本体に対して外部と接続されたケーブルを、張力が張力設定値となるように安定させた状態で、ケーブルリールにより巻き取り、また、巻き出すことができる。
【発明の効果】
【0029】
本発明のケーブルリールの制御装置では、張力演算手段とモータトルク演算手段とを備えることで、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつ、ケーブルの巻き取り及び巻き出しを行わせることができる。
また、本発明のケーブルリールの制御方法では、張力演算ステップとモータトルク演算ステップとを行うことで、ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつ、ケーブルの巻き取り及び巻き出しを行うことができる。
本発明のタイヤ式クレーンでは、上記制御装置を備えることで、ケーブルが引っ張られて外部との接続が外れたり、弛んでクレーン本体との接触や混線等が発生してしまうことなく、ケーブルにより外部と接続された状態で好適にクレーン本体を走行させることができる。
【発明を実施するための最良の形態】
【0030】
以下、本発明に係るタイヤ式クレーンの実施形態を、図1〜図6を参照して説明する。図1は、本発明に係るタイヤ式クレーン(Rubber Tired Gantry Crane)の全体図である。
【0031】
図1に示すように、本実施形態のタイヤ式クレーン1は、コンテナヤードY内の路面R上に設置された走行レーンLに外部電源2が設けられていて、該外部電源2からの給電を受けて、走行車両としてタイヤ6aによる走行手段6によって走行レーンL上を自走しつつ、コンテナCの積み下ろしを行うものである。より具体的には、タイヤ式クレーン1は、タイヤ6aにより路面R上を走行するクレーン本体3と、該クレーン本体3から延び外部電源2に接続されるケーブルである走行給電ケーブル4と、クレーン本体3に設けられて走行給電ケーブル4の巻き取り及び巻き出しを行うケーブルリール5と、ケーブルリール5を制御する制御装置20(図2参照)とを備える。
【0032】
クレーン本体3は、タイヤ式の上記走行手段6と、互いに略平行に立設されて走行手段6によりそれぞれ走行可能な一対の脚部7と、該脚部7間に上部で架設された梁部8と、該梁部8に吊設された吊下機構9とを備えている。図1及び図2に示すように、走行手段6は、脚部7に垂直軸を中心として回転自在に支持されたタイヤ6aと、タイヤ6aの方向を変更させる方向調整機構(不図示)と、タイヤ6aを駆動させる車輪駆動モータ(不図示)と、これら方向調整機構及び車輪駆動モータを制御する走行手段制御部6bとを備える。走行手段6の走行手段制御部6bでは、各走行レーンLに沿って配設された地上ガイドラインGとのズレ量を検出するRTG蛇行量検出センサ(不図示)からの検出信号に基づき、方向調整機構に対して走行車輪の方向を切り替えさせ、該地上ガイドラインGに沿うように、車輪駆動モータに対してタイヤ6aを、走行レーンLに沿うレーン内走行方向L1に横走行させる制御を行う。また、クレーン本体3には、位置センサ10が設けられ、レーン内走行方向L1のクレーン本体3の位置が検出され、走行手段制御部6bに入力されている。そして、走行手段制御部6bは、クレーン本体3のレーン内走行方向L1の位置を表す位置データDl、及び、クレーン本体3の走行方向を表す走行データDdを制御装置20に出力している。
【0033】
また、図1に示すように、一対の脚部7は、梁部8及び吊下機構9を支持している。梁部8は、吊下機構9を吊り下げるように支持している。そして、梁部8には、該梁部8の長手方向に沿って吊下機構9が走行可能なように、ガイドレール8aが設けられている。吊下機構9は、図示しない給電部より受電することにより、コンテナCを積み降ろしするように作動する。より具体的に、吊下機構9は、梁部8のガイドレール8aに沿って走行可能トロリ9aと、コンテナCを把持するスプレッダー9bと、トロリ9aからスプレッダー9bを吊り下げている吊下ロープ9cと、該吊下ロープ9cの巻上げ及び巻出しを行う巻上機9dと、トロリ9a、スプレッダー9b及び巻上機9dの作動を制御する吊下機構制御部(図示せず)とを備えている。
【0034】
また、走行給電ケーブル4は、先端に受電側コネクタ4aが設けられて、外部電源2の給電側コネクタ2aと接続されており、これにより外部電源2からの給電を行うことが可能となっている。図1及び図2に示すように、走行給電ケーブル4を収容するケーブルリール5は、一方の脚部7の外側面に設けられている。ケーブルリール5は、略水平な軸心を有して回転可能で走行給電ケーブル4が巻回されたドラム5aと、出力軸が減速機(図示せず)を介してドラム5aに接続され、該ドラム5aを回転させるモータ5bとを有している。モータ5bは、インバータ5cを介して制御装置20と接続されており、これにより制御装置20から出力されたトルク指令値Ctをトルク指令電流Itに変換して、モータ5bに出力することが可能となっている。そして、制御装置20による制御のもと、モータ5bを駆動させてドラム5aに所定のトルクを作用させることにより、クレーン本体3の走行に伴って、走行給電ケーブル4をドラム5aに巻き取り、または、巻き出すことが可能となっている。なお、モータ5bに入力されているトルク指令電流Itは、制御装置20にも入力されている。また、モータ5bには、モータ5bの出力軸の回転速度ωmを検出するエンコーダ5dと、モータ5b内部の温度を検出する温度センサ5eが設けられている。そして、エンコーダ5dから出力されてモータ5bの回転速度ωmを表すPG信号と、モータ5b内部の温度を表すモータ温度値Mtは、制御装置20に入力されている。ドラム5aには、巻回されている走行給電ケーブル4の外径である巻取半径Rcを検出する巻取半径検出センサ5fが設けられており、これにより検出された巻取半径Rcは、制御装置20に入力されている。
【0035】
次に、制御装置20の詳細について説明する。図3に示すように、制御装置20は、走行給電ケーブル4に作用している張力を表す張力推定値Feを演算する張力演算手段21と、張力演算手段21で演算された張力推定値Feに基づいて、走行給電ケーブル4に作用する張力を予め設定された張力設定値Ffとするのにモータ5bで発生すべきトルクであるトルク指令値Ctを演算し、インバータ5cを介してモータ5bに出力するモータトルク演算手段22とを備える。張力演算手段21は、モータ5bに入力される入力信号を取得し、入力信号によってモータ5bに発生させることになるトルクであるモータ発生トルク値Tmeを演算するモータ発生トルク演算部25と、モータ5bから出力された出力信号を取得し、モータ5bの出力によって実際にドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを演算するドラム作動トルク演算部26と、モータ発生トルク値Tme及びドラム作動トルク値Ttに基づいて張力推定値Feを演算する張力演算部27とを有する。
【0036】
モータ発生トルク演算部25には、上記入力信号として、モータ5bに入力されるトルク指令電流Itが入力されていている。また、モータ発生トルク演算部25には、モータ5bの温度センサ5eからモータ温度値Mtが入力されている。そして、モータ発生トルク演算部25は、図示しないメモリに記憶され、モータ5bの温度とモータ5bの入出力との関係を表すテーブルを参照して、取得したトルク指令電流Itとモータ温度値Mtとに基づいて、当該トルク指令電流Itによってモータ5bから出力されることになるトルクであるモータ発生トルク値Tmeを演算することが可能となっている。
【0037】
また、ドラム作動トルク演算部26には、上記出力信号として、エンコーダ5dからのPG信号(回転速度ωm)が入力されている。また、図示しないメモリには、ケーブルリール5のドラム5aを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値Jが記憶されている。そして、ドラム作動トルク演算部26は、図示しないメモリを参照して、入力されたPG信号から得られるモータ5bの回転速度ωmと回転機構慣性モーメント値Jとの積を微分することで、モータ5bの出力によって実際にドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを求めている。なお、図3において、ドラム作動トルク演算部26を示すブロック内の符号Sは、ラプラス変換子を表している。
【0038】
また、張力演算部27は、モータ発生トルク演算部25で演算されたモータ発生トルク値Tmeと、ドラム作動トルク演算部26で演算されたドラム作動トルク値Ttとの差分を求める第一の減算器27aと、第一の減算器27aの演算結果と予め設定されている回転抵抗分トルク値Trとの差分を求める第二の減算器27bと、第二の減算器27bでの減算結果にモータ5bの減速機構の減速比を乗ずる乗算器27cと、乗算器27cの演算結果を巻取半径検出センサ5fから入力された巻取半径Rcで除する除算器27dとを有する。第一の減算器27aでは、モータ5bで発生させるべきトルクと、結果としてモータ5bによって作動したドラム5aに作用しているトルクとの差分を求めており、これにより外乱によるロス分を表す外乱トルク推定値Tdeを演算している。また、回転抵抗分トルク値Trは、ドラム5a及び減速機を含む回転機構の回転抵抗によるトルクのロス分を表しており、図示しないメモリに記憶されている。
【0039】
また、第二の減算器27bでは、外乱トルク推定値Tdeから回転抵抗分トルク値Trを控除することにより、走行給電ケーブル4に作用する張力の反力によってドラム5aに作用するトルクであるケーブル張力分トルク値Tcを演算している。ここで、第二の減算器27bには、切換器27eが接続されているとともに、切換器27eには巻き状態判断部27fが接続されている。巻き状態判断部27fでは、走行手段6の走行手段制御部6bから位置データDl及び走行データDdが入力されている。そして、巻き状態判断部27fでは、位置データDlと走行データDdとに基づいて、ケーブルリール5のドラム5aが走行給電ケーブル4を巻き取っている巻き取り状態か、巻き出している巻き出し状態かを判断し、これを巻き情報Drとして切換器27eに出力している。より具体的には、巻き状態判断部27fでは、位置データDlに基づいてクレーン本体3が走行レーンLにおいて、レーン内走行方向L1に沿って外部電源2と正対する位置を原点としていずれの側に位置するかを判断している。そして、巻き情報判断部27fは、当該判断結果と、走行データDdから得られる走行方向から、クレーン本体3が外部電源2に近づく方向に移動していると判断する場合には、走行給電ケーブル4をケーブルリール5で巻き取る巻き取り状態と判断し、遠ざかる方向に移動していると判断する場合には、走行給電ケーブル4をケーブルリール5から巻き出す巻き出し状態と判断している。
【0040】
そして、切換器27eでは、巻き情報Drに基づいて、巻き取り時には、図示しないメモリを参照して取得した回転抵抗分トルク値Trをそのまま第二の減算器27bに入力し、これにより第二の減算器27bでは、外乱トルク推定値Tdeから回転抵抗分トルク値Trを減じてケーブル張力分トルク値Tcとして出力することとなる。一方、巻き出し時には、切換器27eでは、回路の切換えを行って、回転抵抗分トルク値Trに<−1>を乗じさせて、第二の減算器27bに入力し、これにより第二の減算器27bでは、外乱トルク推定値Tdeに回転抵抗分トルク値Trを加えてケーブル張力分トルク値Tcとして出力することとなる。そして、張力演算手段27では、第二の減算器27bによって演算されたケーブル張力分トルク値Tcに乗算器27cで減速比を乗算した結果を、除算器27dにおいて巻取半径Rcで除する。これにより現在の巻取半径Rcにおいてケーブル張力分トルク値Tcと対応して走行給電ケーブル4に作用する張力を表す張力推定値Feが演算され、出力されている。
【0041】
また、張力推定値Feからトルク指令値Ctを演算するモータトルク演算手段22は、張力設定値Ffに対応してモータ5bとして発生させるべきトルクの基準となる基準トルク値Tsを演算する基準トルク演算部30と、張力推定値Feに基づいて基準トルク値Tsの補正すべき量を表すトルク補正値ΔTを演算するトルク補正値演算部31と、基準トルク値Tsからトルク補正値ΔTを控除してトルク指令値Ctを求めるトルク指令値演算部32とを有する。張力設定値Ffは、図示しないメモリに記憶されており、張力が大きくなって走行給電ケーブル4が損傷し、若しくは、走行給電ケーブル4の外部電源2との接続がはずれてしまうことがなく、また、張力が小さくなって弛みが生じてしまわない大きさに設定されている。そして、基準トルク演算部30では、図示しないメモリから張力設定値Ffを参照するとともに、入力される巻取半径Rcを取得し、両者を乗ずることによって基準トルク値Tsを求めている。
【0042】
また、トルク補正値演算部31は、メモリから参照した張力設定値Ffと張力演算手段21で演算された張力推定値Feとの差分を求める減算器31aと、減算器31aによる演算結果に、取得した巻取半径Rcを乗じる第一の乗算器31bと、第一の乗算器31bによる演算結果に比例ゲインを乗じてトルク補正値ΔTとして出力する第二の乗算器31cとを有する。減算器31aでは、張力設定値Ffと張力推定値Feとの差分を求めることにより、予定されている走行給電ケーブル4の張力と、モータ5bを駆動させて実際に作用したと推定される張力との誤差が求められる。そして、第一の乗算器31bでは、現在の巻取半径Rcで当該誤差分の張力によって生じるトルクを求め、これに第二の乗算器31cで比例ゲインを乗じた値をトルク補正値ΔTとしている。そして、トルク指令値演算部32では、基準トルク値Tsからトルク補正値ΔTを減じて、トルク指令値Ctを求めてモータ5bに出力している。
【0043】
以上のような構成によって、タイヤ式クレーン1の走行に伴って、ケーブルリール5によって所定の張力を与えつつ走行給電ケーブル4の巻き取り、及び、巻き出しを行う際の制御装置20の制御手順の詳細について図3に基づいて説明する。図3に示すように、タイヤ式クレーン1の走行に伴ってケーブルリール5のモータ5bが駆動すると、モータ5bからは張力設定値Ffと対応した所定のモータ発生トルクTmが出力される。そして、走行給電ケーブル4を巻回するドラム5aには、モータ5bからのモータ発生トルクTmからロス分となる外乱トルクTdtが控除されたトルクが作用することとなる。このため、ドラム5aは、作用するトルクと、ドラム5aを含む回転機構全体の慣性モーメントとに応じた回転速度ωmで回転し、走行給電ケーブル4に張力を作用させながら、巻き取り、または、巻き出しを行うこととなる。
【0044】
なお、外乱トルクTdtとは、モータ5bの出力軸よりもドラム5a側で、さらに、走行給電ケーブル4側から、それぞれドラム5aに作用するトルクを合成したものを意味している。前者のトルクとしては、ドラム5aやモータ5bの減速機などを含むモータ5bの出力軸よりドラム5a側の回転機構全体の回転抵抗によるトルクがある。また、後者としては、走行給電ケーブル4に作用する張力の反力によるトルクがある。走行給電ケーブル4の張力は、ドラム5aに作用しているトルク、ドラム5aにおける走行給電ケーブル4の巻取半径の変化によって変動するのみならず、タイヤ式クレーン1が外部電源2に対していずれの方向に走行しているか、また、定速走行中なのか、若しくは加減速中なのかなどによっても変動する。
【0045】
そして、上記のとおりモータ5bを駆動して走行給電ケーブル4の巻き取りまたは巻き出しを行う際に、制御装置20の張力演算手段21において、ドラム作動トルク演算部26にはエンコーダ5dから回転速度ωmが順次入力され、さらに、モータ発生トルク演算部25にはインバータ5cからトルク指令電流Itが、また、温度センサ5eからモータ温度値Mtが順次入力されている。そして、制御装置20は、まず、張力演算ステップとして、張力演算手段21によって現在走行給電ケーブル4に作用している張力である張力推定値Feを演算する。すなわち、モータ発生トルク演算部25では、入力されたトルク指令電流Itから、図示しないメモリに記憶されているテーブルを参照してモータ発生トルク値Tmを演算する。この際、モータ温度値Mtを参照し、モータ発生トルク値Tmeを決定している。モータ5bの出力トルクは、入力のトルク指令電流Itに対して温度が高いと大きくなり、また、温度が低くなると小さくなるが、モータ温度値Mtを参照することで、温度の影響を考慮して入力信号であるトルク指令電流Itに対して正確にモータ5bの出力であるモータ発生トルク値Tmを演算することができる。また、ドラム作動トルク演算部26では、入力されたモータ5bの出力信号である回転速度ωmから、ドラム5aを回転動作させているトルクであるドラム作動トルク値Ttを演算する。この際予め設定された回転機構慣性モーメント値Jを用いることで、ドラム5aを含む回転機構の慣性モーメントを考慮して正確にドラム作動トルク値Ttを求めることができる。
【0046】
次に、第一の減算器27aで、モータ発生トルク値Tmeからドラム作動トルク値Ttを減じることで、モータ5bによってドラム5aに入力したトルクと、実際のドラム5aが回転動作したトルクの差、すなわち、外乱によるロス分となる外乱トルク推定値Tdeを求めることができる。次に、第二の減算器27bで、図示しないメモリから回転抵抗分トルク値Trを参照して、演算された外乱トルク推定値Tdeに対して回転抵抗分トルク値Trを加算または減算してケーブル張力分トルク値Tcを求める。ここで、切換器27e及び巻き情報判断部27fにより、ケーブルリール5で走行給電ケーブル4を巻き取っている時には、回転抵抗分トルク値Trを加算することとなり、これにより外乱トルクにおいて、ドラム5aの回転抵抗によるトルクの影響を控除して、走行給電ケーブル4に作用する張力の反力によるトルクを正確に求めることができる。また、切換器27e及び巻き情報判断部27fにより、ケーブルリール5で走行給電ケーブル4を巻き出している時には、回転抵抗分トルク値Trを減算することとなり、これにより外乱トルクにおいて、ドラム5aの回転抵抗によるトルクの影響を控除して、走行給電ケーブル4に作用する張力の反力によるトルクを正確に求めることができる。そして、求めたケーブル張力分トルクTcに対して、乗算器27cが減速比を乗じ、さらに除算器27dが、その演算結果を巻取半径検出センサ5fから取得した巻取半径Rcで除することにより、モータ5bの減速比、並びに、変動する巻取半径Rcを考慮して、現在走行給電ケーブル4に作用している張力を表す張力推定値Feを正確に演算することができる。
【0047】
次に、制御装置20は、モータトルク演算ステップとして、モータトルク演算手段22によって張力演算ステップで演算された張力推定値Feに基づいて、走行給電ケーブル4に作用する張力を予め設定された張力設定値Ffとするのにモータ5bで発生すべきトルクであるトルク指令値Ctを演算し、出力する。まず、基準トルク演算部30は、図示しないメモリに記憶された張力設定値Ffを参照するとともに、巻取半径検出センサ5fから巻取半径Rcを取得し、これらから基準トルク値Tsを求める。次に、トルク補正値演算部31は、張力演算手段21で演算された張力推定値Feからトルク補正値ΔTを求める。すなわち、まず、減算器31aで張力設定値Ffと張力推定値Feとの差分、すなわち予定されている張力と実際に作用している張力との誤差を求める。そして、第一の乗算器31bで当該差分に巻取半径検出センサ5fから取得した巻取半径Rcを乗ずることで、現在の巻取半径を考慮してトルク補正値ΔTを求めることができる。そして、トルク指令値演算部32で、基準トルク値Tsからトルク補正値ΔTを控除してトルク指令値Ctとすることで、予定されている張力と実際に作用している張力との誤差を考慮して、走行給電ケーブル4に作用する張力が張力設置値Ffとなるトルクを発生させるようなトルク指令値Ctを出力することができる。
【0048】
以上のように、本実施形態のケーブルリール5の制御装置20では、張力演算手段21とモータトルク演算手段22とを備えることで、ケーブルリール5によって走行するタイヤ付きクレーン1と外部との間で、外乱の影響を控除して作用する張力を安定させつつ、走行給電ケーブル4の巻き取り及び巻き出しを行わせることができる。特に、本実施形態の制御装置20では、ケーブルリール5の巻取半径、ドラム5aを含む回転機構の慣性モーメント及び回転抵抗、ケーブルリール5の巻き状態、並びに、モータ5dの温度状態を考慮して張力推定値Feを演算し、これに基づきトルク指令値Ctを演算することで、より正確に外乱の影響を控除して走行給電ケーブル4に作用する張力の安定を図ることができる。その一方で、制御装置20では、モータ5dの入出力信号、モータ5dの温度情報、ケーブルリール5の巻取半径及び巻き情報と最小限の項目を変数として取得し、また、張力設定値Ff、ドラム5aを含む回転機構の慣性モーメント及び回転抵抗と、最小限の定数を初期設定するだけで走行給電ケーブル4に作用する張力を演算し、トルク指令値Ctを決定するので、演算負荷を最小限に抑えることができる。
【0049】
なお、本実施形態では、ケーブルリール5及び制御装置20をタイヤ式クレーン1に搭載した例として説明しているが、これに限るものではなく、様々な走行車両に適用可能であり、当然にレール上を走行する門型クレーンなどにも適用可能である。しかしながら、上記のように外乱の影響を控除して走行給電ケーブル4の巻き取り及び巻き出しを行わせることができる点で、走行速度の変動や蛇行による張力変動が大きいタイヤ式クレーンにおいて、より有効である。
【0050】
また、本実施形態では、張力演算手段21では、モータ5bの入力信号として、トルク指令電流Itを取得し、また、出力信号として回転速度ωmを取得するものとしたが、これに限るものではない。例えば入力信号としては、インバータ5cで変換される前のトルク指令値Ctを取得し、これに基づいてモータ発生トルク値Tmeを演算するものとしても良い。また、張力演算手段21では、回転抵抗分トルク値Trの加減算を第一の減算器27aでの演算結果に対して行うものとしたが、これに限るものではなく、モータ発生トルク値Tmeに対して加算または減算を行い、あるいは、ドラム作動トルク値Ttに対して減算または加算を行うものとしても良い。また、巻き状態判断部27fでは、走行手段制御部6bから入力された信号に基づいてケーブルリール5の巻き状態を判断し、これに基づいて回転抵抗分トルク値Trを加算するか、減算するかの切換えを行うものとしたが、これに限るものではない。すなわち、巻き状態判断部27fでは、外部の各種センサから直接情報を取得して、これに基づいて巻き状態を判断しても良い。あるいは、エンコーダ5dから出力される回転速度に基づいて、巻き状態を判断しても良い。また、巻取半径5fは、外部の巻取半径検出センサ5fから入力により取得されるものとしたが、これに限るものではなく、例えば、エンコーダ5dから出力される回転数を積算することで、巻き状態を判断するものとしても良い。
【0051】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施形態のタイヤ式クレーンの全体を示す斜視図である。
【図2】本発明の実施形態のタイヤ式クレーンのブロック図である。
【図3】本発明の実施形態のタイヤ式クレーンにおいて、制御装置の制御ロジックの詳細を示すブロック図である。
【符号の説明】
【0053】
1 タイヤ式クレーン(走行車両)
3 クレーン本体
4 走行給電ケーブル(ケーブル)
5 ケーブルリール
6 走行手段
6a タイヤ
5a ドラム
5b モータ
20 制御装置
21 張力演算手段
22 モータトルク演算手段
25 モータ発生トルク演算部
26 ドラム作動トルク演算部
27 張力演算部
30 基準トルク演算部
31 トルク補正値演算部
32 トルク指令値演算部
【特許請求の範囲】
【請求項1】
走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御装置であって、
前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算手段と、
該張力演算手段で演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段とを備えることを特徴とするケーブルリールの制御装置。
【請求項2】
請求項1に記載のケーブルリールの制御装置において、
前記張力演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することを特徴とするケーブルリールの制御装置。
【請求項3】
請求項1または請求項2に記載のケーブルリールの制御装置において、
前記張力演算手段は、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するモータ発生トルク演算部と、
前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算するドラム作動トルク演算部と、
前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算する張力演算部とを有することを特徴とするケーブルリールの制御装置。
【請求項4】
請求項3に記載のケーブルリールの制御装置において、
前記張力演算手段の前記ドラム作動トルク演算部は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定されて前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することを特徴とするケーブルリールの制御装置。
【請求項5】
請求項3または請求項4に記載のケーブルリールの制御装置において、
前記張力演算手段の前記張力演算部は、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値が予め設定されているとともに、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することを特徴とするケーブルリールの制御装置。
【請求項6】
請求項3に記載のケーブルリールの制御装置において、
前記張力演算手段の前記モータ発生トルク演算部は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することを特徴とするケーブルリールの制御装置。
【請求項7】
請求項1から請求項6のいずれかに記載のケーブルリールの制御装置において、
前記モータトルク演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、前記張力設定値に該巻取半径を乗算して基準トルク値を演算する基準トルク演算部と、
前記巻取半径を取得し、該巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算するトルク補正値演算部と、
前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めるトルク指令値演算部とを有することを特徴とするケーブルリールの制御装置。
【請求項8】
走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御方法であって、
張力演算手段が前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算ステップと、
モータトルク演算手段が、該張力演算ステップで演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算ステップとを備えることを特徴とするケーブルリールの制御方法。
【請求項9】
請求項8に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記張力演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項10】
請求項8または請求項9に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記張力演算手段が、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するとともに、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算し、求められた前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項11】
請求項10に記載のケーブルリールの制御方法において、
前記張力演算ステップで、前記張力演算手段は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定しておいた前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することを特徴とするケーブルリールの制御方法。
【請求項12】
請求項10または請求項11に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値を予め設定しておいて、前記張力演算手段は、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項13】
請求項12に記載のケーブルリールの制御方法において、
前記張力演算ステップで、前記張力演算手段は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することを特徴とするケーブルリールの制御方法。
【請求項14】
請求項8から請求項13のいずれかに記載のケーブルリールの制御方法において、
前記モータトルク演算ステップでは、前記モータトルク演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得して前記張力設定値に該巻取半径を乗算して基準トルク値を演算するとともに、前記巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算し、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めることを特徴とするケーブルリールの制御方法。
【請求項15】
請求項1から請求項7のいずれかに記載のケーブルリールの制御装置と、
該制御装置によって前記モータが制御されるケーブルリールと、
前記制御装置及び前記ケーブルリールが設けられ、タイヤによる走行手段によって走行可能なクレーン本体とを備えることを特徴とするタイヤ式クレーン。
【請求項1】
走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御装置であって、
前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算手段と、
該張力演算手段で演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段とを備えることを特徴とするケーブルリールの制御装置。
【請求項2】
請求項1に記載のケーブルリールの制御装置において、
前記張力演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することを特徴とするケーブルリールの制御装置。
【請求項3】
請求項1または請求項2に記載のケーブルリールの制御装置において、
前記張力演算手段は、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するモータ発生トルク演算部と、
前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算するドラム作動トルク演算部と、
前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算する張力演算部とを有することを特徴とするケーブルリールの制御装置。
【請求項4】
請求項3に記載のケーブルリールの制御装置において、
前記張力演算手段の前記ドラム作動トルク演算部は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定されて前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することを特徴とするケーブルリールの制御装置。
【請求項5】
請求項3または請求項4に記載のケーブルリールの制御装置において、
前記張力演算手段の前記張力演算部は、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値が予め設定されているとともに、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することを特徴とするケーブルリールの制御装置。
【請求項6】
請求項3に記載のケーブルリールの制御装置において、
前記張力演算手段の前記モータ発生トルク演算部は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することを特徴とするケーブルリールの制御装置。
【請求項7】
請求項1から請求項6のいずれかに記載のケーブルリールの制御装置において、
前記モータトルク演算手段は、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、前記張力設定値に該巻取半径を乗算して基準トルク値を演算する基準トルク演算部と、
前記巻取半径を取得し、該巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算するトルク補正値演算部と、
前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めるトルク指令値演算部とを有することを特徴とするケーブルリールの制御装置。
【請求項8】
走行車両に設けられ、外部との接続を行うケーブルを巻回するドラムと、該ドラムを回転駆動させるモータとを有し、前記走行車両の走行に伴って前記ケーブルの巻き取り及び巻き出しを行うケーブルリールを制御するケーブルリールの制御方法であって、
張力演算手段が前記モータによって発生させるトルクであるモータ発生トルク値と前記モータによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいて前記ケーブルに作用している張力である張力推定値を演算する張力演算ステップと、
モータトルク演算手段が、該張力演算ステップで演算された前記張力推定値に基づいて、前記ケーブルに作用する張力を予め設定された張力設定値とするのにモータで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算ステップとを備えることを特徴とするケーブルリールの制御方法。
【請求項9】
請求項8に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記張力演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得し、取得した該巻取半径、及び、前記モータ発生トルク値と前記ドラム作動トルク値との差分から、前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項10】
請求項8または請求項9に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記張力演算手段が、前記ドラムを所定トルクで回転駆動させるために前記モータに入力される入力信号を取得し、該入力信号に基づいて前記モータ発生トルク値を演算するとともに、前記入力信号により前記モータから出力され検出された出力信号を取得し、該出力信号に基づいて前記ドラム作動トルク値を演算し、求められた前記モータ発生トルク値及び前記ドラム作動トルク値に基づいて前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項11】
請求項10に記載のケーブルリールの制御方法において、
前記張力演算ステップで、前記張力演算手段は、前記出力信号として前記モータの回転速度を取得し、該回転速度、及び、予め設定しておいた前記ケーブルリールの前記ドラムを含む回転機構の慣性モーメントを表す回転機構慣性モーメント値に基づいて、前記ドラム作動トルク値を演算することを特徴とするケーブルリールの制御方法。
【請求項12】
請求項10または請求項11に記載のケーブルリールの制御方法において、
前記張力演算ステップでは、前記ドラムを含む回転機構の回転抵抗によるトルクを表す回転抵抗分トルク値を予め設定しておいて、前記張力演算手段は、前記ドラムによって前記ケーブルを巻き取っている巻取り状態か、巻き出している巻出し状態かを表す巻き情報を取得し、該巻き情報に基づいて、前記モータ発生トルク値と前記ドラム作動トルク値との差分に対して、前記ケーブルを巻き取っている時は前記回転抵抗分トルク値を加算し、また、前記ケーブルを巻き出している時は、前記回転抵抗分トルク値を減算した結果に基づいて、前記張力推定値を演算することを特徴とするケーブルリールの制御方法。
【請求項13】
請求項12に記載のケーブルリールの制御方法において、
前記張力演算ステップで、前記張力演算手段は、前記入力信号として前記モータに入力されるトルク指令電流を取得するとともに、前記モータの温度を表わすモータ温度値を取得し、前記トルク指令電流及び前記モータ温度値に基づいて、前記モータ発生トルク値を演算することを特徴とするケーブルリールの制御方法。
【請求項14】
請求項8から請求項13のいずれかに記載のケーブルリールの制御方法において、
前記モータトルク演算ステップでは、前記モータトルク演算手段が、前記ドラムに巻回されている前記ケーブルの巻取半径を取得して前記張力設定値に該巻取半径を乗算して基準トルク値を演算するとともに、前記巻取半径、前記張力推定値、及び、前記張力設定値からトルク補正値を演算し、前記基準トルク値から前記トルク補正値を控除して前記トルク指令値を求めることを特徴とするケーブルリールの制御方法。
【請求項15】
請求項1から請求項7のいずれかに記載のケーブルリールの制御装置と、
該制御装置によって前記モータが制御されるケーブルリールと、
前記制御装置及び前記ケーブルリールが設けられ、タイヤによる走行手段によって走行可能なクレーン本体とを備えることを特徴とするタイヤ式クレーン。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2010−70338(P2010−70338A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−240999(P2008−240999)
【出願日】平成20年9月19日(2008.9.19)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月19日(2008.9.19)
【出願人】(000006208)三菱重工業株式会社 (10,378)
[ Back to top ]