
ケーブル収納機構
【課題】溶接ロボットに接続されている複数本のケーブルの出し入れが簡便に行え、コンパクトに収納すること。
【解決手段】フロア2に搭載された動力装置3及び制御装置4と、フロアから吊り下げられ、切り抜き溝を渦巻き状に切って形成したハンガーレール7を有するローラ滑車テーブル6と、フロア2の側部直下に設けられ、ハンガーレール7と連続してワークまで延びているI型レール8と、I型レールを自走する溶接ロボット30と、動力装置及び制御装置と溶接ロボットとを接続する複数本のケーブル15と、2段式のローラ滑車10と、ローラ滑車から保持部材用吊下体11を介して吊り下げられ、複数のケーブルを保持するケーブル保持部材12とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材9と、ケーブル走行用部材同士を回動自在に連結する複数のロッド13とを備えている。
【解決手段】フロア2に搭載された動力装置3及び制御装置4と、フロアから吊り下げられ、切り抜き溝を渦巻き状に切って形成したハンガーレール7を有するローラ滑車テーブル6と、フロア2の側部直下に設けられ、ハンガーレール7と連続してワークまで延びているI型レール8と、I型レールを自走する溶接ロボット30と、動力装置及び制御装置と溶接ロボットとを接続する複数本のケーブル15と、2段式のローラ滑車10と、ローラ滑車から保持部材用吊下体11を介して吊り下げられ、複数のケーブルを保持するケーブル保持部材12とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材9と、ケーブル走行用部材同士を回動自在に連結する複数のロッド13とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はケーブル収納機構、更に詳しくはワークに対して何らかの作業を行う作業ロボットに接続されている複数本の長尺なケーブルの出し、入れが簡便に行え、複数本の長尺なケーブルをコンパクトに収納することができる渦巻き式のケーブル収納機構に関するものである。
【背景技術】
【0002】
従来の移動ロボットや走行車両等の走行体のケーブルを巻き取ったり、送り出したりする走行体用ケーブル処理装置は、走行体のベース上にケーブルを巻き取るケーブルドラムを設け、これを逆回転駆動するドラム用駆動モータを設け、ケーブルドラムから引き出すケーブルの案内送り用の一対のガイドプーリを備えたプッシャ機構を設け、その一方のガイドプーリを駆動する駆動用モータを設け、ケーブルドラムに連動しプッシャ機構を往復移動せしめる立体カムを設けて構成されている(例えば、特許文献1参照)。
また、もう1つの従来のケーブル処理機構は、ワークに対して移動しながら作業を行うロボットへの駆動用ケーブル及び制御用ケーブルの処理機構であって、前記ケーブルを、リンクの両端を順次枢支して鋸歯状に形成したリンク機構の各リンクに沿わせるようにして構成されている(例えば、特許文献2参照)。
【特許文献1】特開平6−86441号公報(第1頁、図1)
【特許文献2】特開平11−32424号公報(第1頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記したような従来の走行体用ケーブル処理装置は、ケーブルの巻き取り、送り出しにケーブルドラムを用い、1本のケーブルの巻き取り、送り出しを対象としているため、複数本で長尺なケーブルの巻き取り、送り出しはできなかった。
また、上記したような従来のケーブル処理機構は、リンク機構が伸縮してケーブルをコンパクトに処理するものであるが、ケーブルの送り出し、引き戻しがリンク機構の伸縮によるものであるため、複数本のケーブルを処理しようとする場合にはケーブルの重量によりリンク機構の伸縮に大きな力を要し、ケーブルの送り出し、引き戻しがスムーズに行かず、複数本のケーブルの処理には適さないものであった。
本発明はかかる問題を解決するためになされたものであり、ワークに対して作業を行う作業ロボットに接続されている複数本の長尺なケーブルの出し、入れが簡便に行え、複数本の長尺なケーブルをコンパクトに収納することができるケーブル収納機構を得ることを目的とするものである。
【課題を解決するための手段】
【0004】
本発明に係るケーブル収納機構は、架台から所定の高さに設置されたフロアと、フロア上に設けられた動力装置及び制御装置と、フロアから水平に吊り下げられ、中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレールを有するローラ滑車テーブルと、フロアの側部直下に取り付けられ、一端はハンガーレールの終端が下方となるように重ね合わせられ、他端がワークまで延びているI型レールと、I型レールを自走する作業ロボットと、動力装置及び制御装置と作業ロボットとを接続する長尺な複数本のケーブルと、上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材と、隣接するケーブル走行用部材同士を回動自在に連結する複数のロッドとを備えて構成されている。
【発明の効果】
【0005】
本発明に係るケーブル収納機構においては、架台から所定の高さに設置されたフロア上に動力装置及び制御装置が搭載され、フロアからローラ滑車テーブルが水平に吊り下げられ、そのローラ滑車テーブルは中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレールを有し、フロアの側部直下に他端がワークまで延びているI型レールの一端側が配置させられ、そのI型レールの一端がハンガーレールの終端が下方となるように重ね合わせられ、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材は、上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、隣接するケーブル走行用部材同士を回動自在なロッドで連結し、I型レールに自走する作業ロボットを設けているので、作業ロボットがI型レールをワークに向けて自走すると、ローラ滑車テーブルのハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材がハンガーレールの終端に向けて渦巻き型に走行し、ハンガーレールの終端を通過したケーブル走行用部材は今度はI型レールを走行し、これらケーブル走行用部材に保持されている複数本のケーブルが自動的にI型レールに向けて繰り出され、今度は作業ロボットがI型レールをハンガーレールに向けて自走すると、複数のケーブル走行用部材がハンガーレールの始端に向けて渦巻き型に走行し、I型レールを通過したケーブル走行用部材は次にハンガーレールを走行し、これらケーブル走行用部材に保持されている複数本のケーブルが自動的にハンガーレールに向けて巻き戻され、複数本のケーブルの収納が、人手を掛けずに自動的に、しかも滑らかに簡便に行うことができ、しかも複数本のケーブルは渦巻き状にコンパクトに収納されるため、ケーブル収納機構を小面積のスペースで構成することができるという効果がある。
【発明を実施するための最良の形態】
【0006】
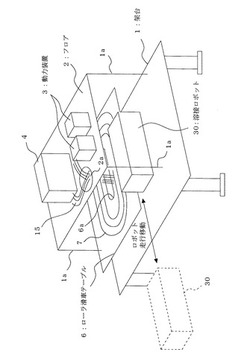
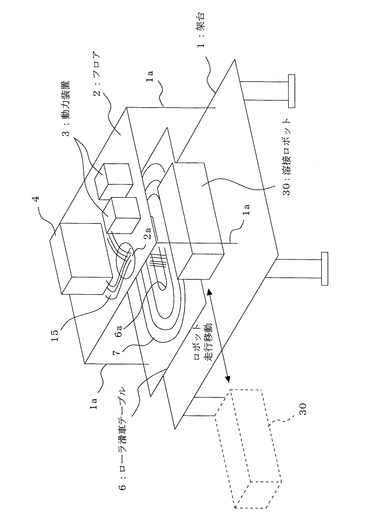
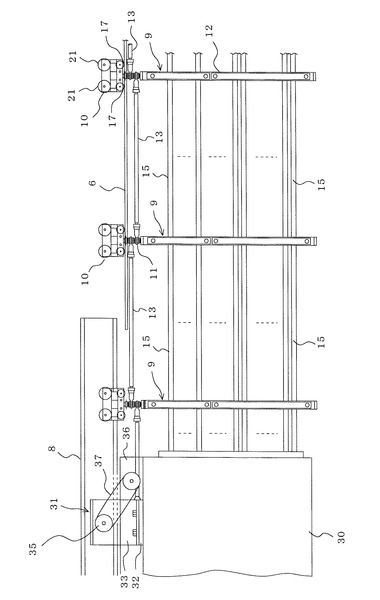
図1は本発明の実施の形態1のケーブル収納機構の概略構成を示す斜視図、図2は同ケーブル収納機構のローラ滑車テーブルの概略構成を示す平面図、図3は同ケーブル収納機構の概略構成を示す側面図、図4は同ケーブル収納機構のローラ滑車の乗り移り部を示す説明図、図5は同ケーブル収納機構のケーブル走行用部材の構成を示す説明図、図6は同ケーブル収納機構のロボット走行台車の構成を示す説明図である。
図1において、ケーブル収納場所に据え付けられた架台1上に所定の高さにフロア2が設置されている。そのフロア2上には電源装置等の動力装置3と溶接ロボット30を自走させると共に溶接ロボット自体を駆動制御する制御装置4が搭載されている。そのフロア2の下面には複数のハンガー5により四角形のローラ滑車テーブル6が吊り下げられている。そのフロア2の略中央部にケーブル通し穴2aが設けられている。
【0007】
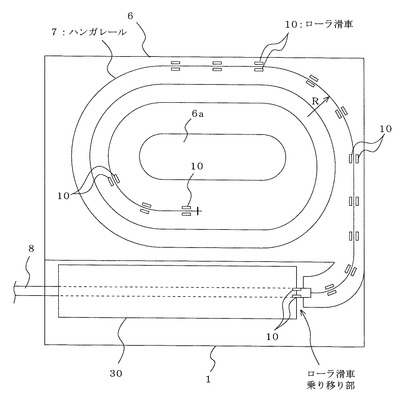
そのローラ滑車テーブル6には、図2に示すように、略中央部を始端として外周縁部を終端とし、その途中のコーナ部を所定の半径を持つ切り抜き溝を渦巻き状に切ってハンガーレール7が形成されている。そのハンガーレール7の全長は約22mである。また、ローラ滑車テーブル6の略中央部にケーブル貫通穴6aが設けられている。
そのハンガーレール7の終端にはロボット格納用のI型レール8の一端部が上下に重なり合うように設置されている。即ち、I型レール8が上で、ハンガーレール7がI型レール8の下にくるように設定されている。I型レール8の他端はワーク(図示省略)に向けて延びている。
【0008】
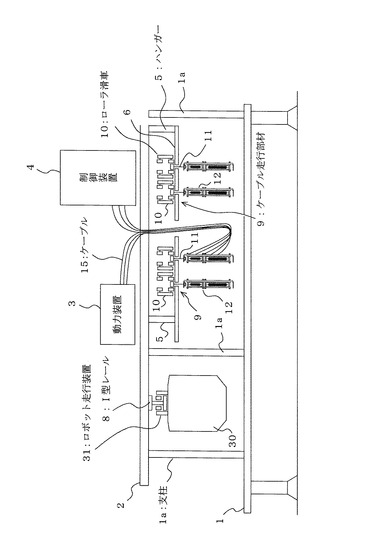
ハンガーレール7には、その始端から終端の間に複数のケーブル走行用部材9が垂下するように取り付けられている。このケーブル走行用部材9は、ハンガーレール7を走行する2段式のローラ滑車10と、ローラ滑車10からハンガーレール7の切り抜き溝を通過して回転自在に吊り下げられる保持部材用吊下体11と、保持部材用吊下体11から垂れ下がり、複数本のケーブル15を並行状態に保持するケーブル保持部材12とで構成されている。
これら複数のケーブル走行用部材9は互いの距離を一定に保持するロッド13で連結されており、隣接するケーブル走行用部材9がハンガーレール7のコーナ部を走行できるように、ケーブル走行用部材9に対してロッド12が回動自在に連結されている。
また、このロッド12の長さは、隣接するケーブル走行用部材9がハンガーレール7のコーナ部を滑らかに走行できるような長さに設定される。
【0009】
ハンガーレール7の始端に位置するケーブル走行用部材9には、フロア2上に搭載されている動力装置3から引き出されているいる複数本の駆動用ケーブル及び制御装置4から引き出されている複数本の制御用ケーブル等の複数本のケーブル15が保持されている。複数本のケーブル15の本数は例えば5〜20本、長さが例えば10〜30mである。
これら複数本のケーブル15の途中は複数のケーブル走行用部材9に保持されており、ハンガーレール7の終端に位置するケーブル走行用部材9に保持されている複数本のケーブル15は溶接ロボット30に接続されている。
その溶接ロボット30はI型レール8を走行するロボット走行台車31から吊り下げられている。
【0010】
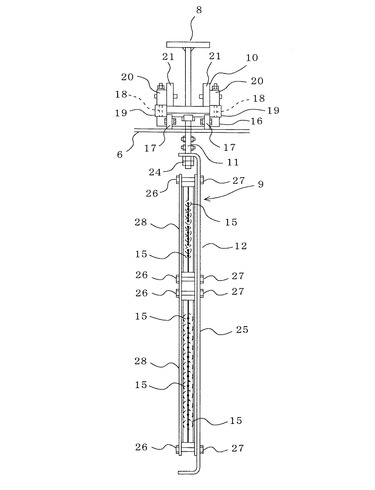
次に、ケーブル走行用部材9の構成について図5に基づいて説明する。
ケーブル走行用部材9は、2段式のローラ滑車10と保持部材用吊下体11とケーブル保持部材12とで構成されている。
その2段式のローラ滑車10は、H型の台座16と、台座16の両端部内側にそれぞれ回転自在に取り付けられた4つの下段ローラ17と、台座16の両端部にそれぞれ立設され、位置決め用ローラ19を有する4つのローラ取付軸18と、台座16の片側にそれぞれ位置する2つのローラ取付軸18を支承する2つのローラ支持体20と、相対向する2つのローラ支持体20の内側に回転自在に取り付けられた4つの上段ローラ21とから形成されている。
【0011】
このようにケーブル走行用部材9のローラ滑車10を2段式としているのは、重量の重い溶接ロボット30と複数本のケーブル15を保持する複数のケーブル走行用部材9とは、頑丈なI型レール8を上段ローラ20で走行させ、複数のケーブル走行用部材9だけの場合はそれほど頑丈でなくてもよいハンガーレール7を下段ローラ17で走行させるようにしたのである。
そのケーブル保持部材12は、ローラ滑車10の台座16の中央部から回転自在に吊り下げられた保持部材用吊下体11の下端にボルト24で取り付けられ、垂下する細長い1本のケーブル保持板25と、そのケーブル保持板25に対してボルト26とナット27とでそれぞれ取り付けられ、複数本の上下に並列されたケーブル15をケーブル保持板25とで挟持状態に保持する2枚の挟持板28とで構成されている。
【0012】
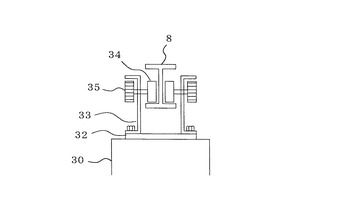
さらに、ロボット走行台車31の構成について図4及び図6に基づいて説明する。
ロボット走行台車31は、台座32と、台座32の両側にそれぞれ相対向するように立設された2つの断面コ型の車軸支持体33と、2つの車軸支持体33の両内側に設けられた走行車輪34と、2つの車軸支持体33の両外側に走行車輪34と同軸に設けられプーリ35とを有して形成されている。そして、ロボット走行台車31のプーリ35が溶接ロボット30に組み込まれた駆動モータ36とベルト37で接続されている。
従って、溶接ロボット30に組み込まれた駆動モータ36が制御装置4からの駆動制御信号により駆動されると、駆動モータ36の回転がベルト37を介してプーリ35に伝えられ、プーリ35の回転に伴って走行車輪34が回転し、溶接ロボット30と一体のロボット走行台車31がI型レール8を走行することになる。
【0013】
次に、本発明の実施形態1のケーブル収納機構の動作について説明する。
(1)溶接ロボット30は、当初はフロア2の側部直下にあるI型レール8から吊り下げられ、I型レール8の始端位置である格納位置にある。
(2)次に、溶接ロボット30がワークに対して溶接を行うために、溶接ロボット30の駆動モータ36が駆動されてロボット走行台車31が自走し、ロボット走行台車31に吊り下げられている溶接ロボット30がI型レール8を格納位置から溶接位置に向けて走行する。このとき、動力装置3や制御装置4と溶接ロボット30とを接続している複数本のケーブル15も同時に繰り出される必要がある。
(3)そこで、溶接ロボット30がI型レール8を格納位置から溶接位置に向けて走行すると、溶接ロボット30に接続されている複数本のケーブル15を保持している複数のケーブル走行用部材9のうち、溶接ロボット30に一番近いケーブル走行用部材9が溶接ロボット30に牽引され、図4に示すようにケーブル走行用部材9のローラ滑車10の上段ローラ21がI型レール8を走行する。
【0014】
(4)また、溶接ロボット30に一番近いケーブル走行用部材9よりも下流側に位置するその他のケーブル走行用部材9は、そのローラ滑車10の下段ローラ17がローラ滑車テーブル6のハンガーレール7を走行する。
こうして、複数のケーブル走行用部材9が渦巻き状のハンガーレール7を渦巻き型に回りながら走行し、ハンガーレール7の下側に位置するケーブル走行用部材9のケーブル保持部材12に保持されている複数本のケーブル15も渦巻き型に回りながら繰り出されることとなる。
(5)そして、複数のケーブル走行用部材9が渦巻き状のハンガーレール7を渦巻き型に回りながら走行し、それぞれがI型レール8の始端部位置にくると、それぞれのケーブル走行用部材9は、そのローラ滑車10の上段ローラ21がI型レール8を走行し、最終的には、ローラ滑車テーブル6のハンガーレール7の始端位置にあったケーブル走行用部材9がハンガーレール7の終端位置にきた後に、そのローラ滑車10の上段ローラ21がロボット格納用のI型レール8を走行し、溶接ロボット30がワークの位置にきたところで溶接ロボット30の走行を停止し、それに伴い複数のケーブル走行用部材9の走行も停止する。
【0015】
(6)溶接ロボット30によるワークに対する溶接が終了すれば、今度は溶接ロボット30がワークの位置からI型レール8の始端位置に向けて自走する。
そうすると、今度は逆にまずI型レール8の始端位置にあったケーブル走行用部材9がI型レール8を走行し、I型レール8の始端位置からハンガーレール7の終端位置に移り、その後はハンガーレール7の始端位置に向けて走行する。
それ以外の複数のケーブル走行用部材9も引き続きI型レール8を走行し、I型レール8の始端位置からハンガーレール7の終端位置に移り、その後はハンガーレール7のそれぞれの元の位置に向けて走行し、渦巻き型に移動しながら収納される。そして、最後に溶接ロボット30がI型レール8の始端位置である格納位置に戻ることになる。
なお、フロア2のケーブル通し穴2aから周辺装置3及び制御装置4に接続されている複数本のケーブル15が垂れ下がっているところでハンガーレール7の渦巻きの回数分だけ捩れることになるが、垂れ下がりの高さが高くなれば捩れの回数が増えてもケーブル15は痛むことはない。
【0016】
上記本発明の実施の形態1の渦巻き式ケーブル収納機構は、架台1から所定の高さに設置されたフロア2上に動力装置3及び制御装置4が搭載され、フロア2からローラ滑車テーブル6が複数のハンガー5により水平に吊り下げられ、そのローラ滑車テーブル6は中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレール7を有し、フロア2の側部直下に他端がワークまで延びているI型レール8の一端が配置させられ、そのI型レール8の一端が上方でハンガーレール7の終端が下方となるように重ね合わせられ、ハンガーレール7上を所定間隔を置いて配置された複数のケーブル走行用部材9は、上段にI型レールを走行するI型レール用滑車21を、下段にハンガーレール7上を走行するハンガーレール用滑車17を有するローラ滑車10と、ローラ滑車10からハンガーレール7の切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体11と、保持部材用吊下体11に吊り下げられて複数のケーブル15を保持するケーブル保持部材12とからなり、隣接するケーブル走行用部材9同士をロッド13で回動自在に連結し、I型レール8に自走する溶接ロボット30を設けているので、溶接ロボット30がI型レール8をワークに向けて自走すると、ローラ滑車テーブル6のハンガーレール7上を所定間隔を置いて配置された複数のケーブル走行用部材9がハンガーレール7の終端に向けて渦巻き型に走行し、ハンガーレール7の終端を通過したケーブル走行用部材9は今度はI型レール8を走行し、これらケーブル走行用部材9に保持されている複数本のケーブル15が自動的にI型レール8に向けて繰り出され、今度は溶接ロボット30がI型レール8をハンガーレール7に向けて自走すると、複数のケーブル走行用部材9がハンガーレール7の始端に向けて渦巻き型に走行し、I型レール8を通過したケーブル走行用部材9は次にハンガーレール7を走行し、これらケーブル走行用部材7に保持されている複数本のケーブル15が自動的にハンガーレール7に向けて巻き戻され、複数本のケーブル15の収納が、人手を掛けずに自動的に、しかも滑らかに簡便に行うことができ、しかも複数本のケーブル15は渦巻き状に収納されるため、ケーブル収納機構を小面積のスペースで構成することができる。
【0017】
上記実施の形態1の渦巻き式ケーブル収納機構の自走するロボットは溶接ロボットしているが、溶接ロボットに限らず、ワークに対して何らかの作業する作業ロボットであればよいことはいうまでもない。
【図面の簡単な説明】
【0018】
【図1】本発明の実施の形態1のケーブル収納機構の概略構成を示す斜視図。
【図2】同ケーブル収納機構のローラ滑車テーブルの概略構成を示す平面図。
【図3】同ケーブル収納機構の概略構成を示す側面図。
【図4】同ケーブル収納機構のローラ滑車の乗り移り部を示す説明図。
【図5】同ケーブル収納機構のケーブル走行用部材の構成を示す説明図。
【図6】同ケーブル収納機構のロボット走行台車の構成を示す説明図。
【符号の説明】
【0019】
1 架台、2 フロア、3 動力装置、4 制御装置、5 ハンガー、6 ローラ滑車テーブル、7 ハンガーレール、8 I型レール、9 ケーブル走行用部材、10 ローラ滑車、11 保持部材用吊下体、12 ケーブル保持部材、13 ロッド、15 ケーブル、17 ハンガーレール用滑車、21 I型レール用滑車、24 ボルト、25 ケーブル保持板、26 ボルト(締着部材)、27 ナット(締着部材)28 挟持板。
【技術分野】
【0001】
本発明はケーブル収納機構、更に詳しくはワークに対して何らかの作業を行う作業ロボットに接続されている複数本の長尺なケーブルの出し、入れが簡便に行え、複数本の長尺なケーブルをコンパクトに収納することができる渦巻き式のケーブル収納機構に関するものである。
【背景技術】
【0002】
従来の移動ロボットや走行車両等の走行体のケーブルを巻き取ったり、送り出したりする走行体用ケーブル処理装置は、走行体のベース上にケーブルを巻き取るケーブルドラムを設け、これを逆回転駆動するドラム用駆動モータを設け、ケーブルドラムから引き出すケーブルの案内送り用の一対のガイドプーリを備えたプッシャ機構を設け、その一方のガイドプーリを駆動する駆動用モータを設け、ケーブルドラムに連動しプッシャ機構を往復移動せしめる立体カムを設けて構成されている(例えば、特許文献1参照)。
また、もう1つの従来のケーブル処理機構は、ワークに対して移動しながら作業を行うロボットへの駆動用ケーブル及び制御用ケーブルの処理機構であって、前記ケーブルを、リンクの両端を順次枢支して鋸歯状に形成したリンク機構の各リンクに沿わせるようにして構成されている(例えば、特許文献2参照)。
【特許文献1】特開平6−86441号公報(第1頁、図1)
【特許文献2】特開平11−32424号公報(第1頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記したような従来の走行体用ケーブル処理装置は、ケーブルの巻き取り、送り出しにケーブルドラムを用い、1本のケーブルの巻き取り、送り出しを対象としているため、複数本で長尺なケーブルの巻き取り、送り出しはできなかった。
また、上記したような従来のケーブル処理機構は、リンク機構が伸縮してケーブルをコンパクトに処理するものであるが、ケーブルの送り出し、引き戻しがリンク機構の伸縮によるものであるため、複数本のケーブルを処理しようとする場合にはケーブルの重量によりリンク機構の伸縮に大きな力を要し、ケーブルの送り出し、引き戻しがスムーズに行かず、複数本のケーブルの処理には適さないものであった。
本発明はかかる問題を解決するためになされたものであり、ワークに対して作業を行う作業ロボットに接続されている複数本の長尺なケーブルの出し、入れが簡便に行え、複数本の長尺なケーブルをコンパクトに収納することができるケーブル収納機構を得ることを目的とするものである。
【課題を解決するための手段】
【0004】
本発明に係るケーブル収納機構は、架台から所定の高さに設置されたフロアと、フロア上に設けられた動力装置及び制御装置と、フロアから水平に吊り下げられ、中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレールを有するローラ滑車テーブルと、フロアの側部直下に取り付けられ、一端はハンガーレールの終端が下方となるように重ね合わせられ、他端がワークまで延びているI型レールと、I型レールを自走する作業ロボットと、動力装置及び制御装置と作業ロボットとを接続する長尺な複数本のケーブルと、上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材と、隣接するケーブル走行用部材同士を回動自在に連結する複数のロッドとを備えて構成されている。
【発明の効果】
【0005】
本発明に係るケーブル収納機構においては、架台から所定の高さに設置されたフロア上に動力装置及び制御装置が搭載され、フロアからローラ滑車テーブルが水平に吊り下げられ、そのローラ滑車テーブルは中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレールを有し、フロアの側部直下に他端がワークまで延びているI型レールの一端側が配置させられ、そのI型レールの一端がハンガーレールの終端が下方となるように重ね合わせられ、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材は、上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、隣接するケーブル走行用部材同士を回動自在なロッドで連結し、I型レールに自走する作業ロボットを設けているので、作業ロボットがI型レールをワークに向けて自走すると、ローラ滑車テーブルのハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材がハンガーレールの終端に向けて渦巻き型に走行し、ハンガーレールの終端を通過したケーブル走行用部材は今度はI型レールを走行し、これらケーブル走行用部材に保持されている複数本のケーブルが自動的にI型レールに向けて繰り出され、今度は作業ロボットがI型レールをハンガーレールに向けて自走すると、複数のケーブル走行用部材がハンガーレールの始端に向けて渦巻き型に走行し、I型レールを通過したケーブル走行用部材は次にハンガーレールを走行し、これらケーブル走行用部材に保持されている複数本のケーブルが自動的にハンガーレールに向けて巻き戻され、複数本のケーブルの収納が、人手を掛けずに自動的に、しかも滑らかに簡便に行うことができ、しかも複数本のケーブルは渦巻き状にコンパクトに収納されるため、ケーブル収納機構を小面積のスペースで構成することができるという効果がある。
【発明を実施するための最良の形態】
【0006】
図1は本発明の実施の形態1のケーブル収納機構の概略構成を示す斜視図、図2は同ケーブル収納機構のローラ滑車テーブルの概略構成を示す平面図、図3は同ケーブル収納機構の概略構成を示す側面図、図4は同ケーブル収納機構のローラ滑車の乗り移り部を示す説明図、図5は同ケーブル収納機構のケーブル走行用部材の構成を示す説明図、図6は同ケーブル収納機構のロボット走行台車の構成を示す説明図である。
図1において、ケーブル収納場所に据え付けられた架台1上に所定の高さにフロア2が設置されている。そのフロア2上には電源装置等の動力装置3と溶接ロボット30を自走させると共に溶接ロボット自体を駆動制御する制御装置4が搭載されている。そのフロア2の下面には複数のハンガー5により四角形のローラ滑車テーブル6が吊り下げられている。そのフロア2の略中央部にケーブル通し穴2aが設けられている。
【0007】
そのローラ滑車テーブル6には、図2に示すように、略中央部を始端として外周縁部を終端とし、その途中のコーナ部を所定の半径を持つ切り抜き溝を渦巻き状に切ってハンガーレール7が形成されている。そのハンガーレール7の全長は約22mである。また、ローラ滑車テーブル6の略中央部にケーブル貫通穴6aが設けられている。
そのハンガーレール7の終端にはロボット格納用のI型レール8の一端部が上下に重なり合うように設置されている。即ち、I型レール8が上で、ハンガーレール7がI型レール8の下にくるように設定されている。I型レール8の他端はワーク(図示省略)に向けて延びている。
【0008】
ハンガーレール7には、その始端から終端の間に複数のケーブル走行用部材9が垂下するように取り付けられている。このケーブル走行用部材9は、ハンガーレール7を走行する2段式のローラ滑車10と、ローラ滑車10からハンガーレール7の切り抜き溝を通過して回転自在に吊り下げられる保持部材用吊下体11と、保持部材用吊下体11から垂れ下がり、複数本のケーブル15を並行状態に保持するケーブル保持部材12とで構成されている。
これら複数のケーブル走行用部材9は互いの距離を一定に保持するロッド13で連結されており、隣接するケーブル走行用部材9がハンガーレール7のコーナ部を走行できるように、ケーブル走行用部材9に対してロッド12が回動自在に連結されている。
また、このロッド12の長さは、隣接するケーブル走行用部材9がハンガーレール7のコーナ部を滑らかに走行できるような長さに設定される。
【0009】
ハンガーレール7の始端に位置するケーブル走行用部材9には、フロア2上に搭載されている動力装置3から引き出されているいる複数本の駆動用ケーブル及び制御装置4から引き出されている複数本の制御用ケーブル等の複数本のケーブル15が保持されている。複数本のケーブル15の本数は例えば5〜20本、長さが例えば10〜30mである。
これら複数本のケーブル15の途中は複数のケーブル走行用部材9に保持されており、ハンガーレール7の終端に位置するケーブル走行用部材9に保持されている複数本のケーブル15は溶接ロボット30に接続されている。
その溶接ロボット30はI型レール8を走行するロボット走行台車31から吊り下げられている。
【0010】
次に、ケーブル走行用部材9の構成について図5に基づいて説明する。
ケーブル走行用部材9は、2段式のローラ滑車10と保持部材用吊下体11とケーブル保持部材12とで構成されている。
その2段式のローラ滑車10は、H型の台座16と、台座16の両端部内側にそれぞれ回転自在に取り付けられた4つの下段ローラ17と、台座16の両端部にそれぞれ立設され、位置決め用ローラ19を有する4つのローラ取付軸18と、台座16の片側にそれぞれ位置する2つのローラ取付軸18を支承する2つのローラ支持体20と、相対向する2つのローラ支持体20の内側に回転自在に取り付けられた4つの上段ローラ21とから形成されている。
【0011】
このようにケーブル走行用部材9のローラ滑車10を2段式としているのは、重量の重い溶接ロボット30と複数本のケーブル15を保持する複数のケーブル走行用部材9とは、頑丈なI型レール8を上段ローラ20で走行させ、複数のケーブル走行用部材9だけの場合はそれほど頑丈でなくてもよいハンガーレール7を下段ローラ17で走行させるようにしたのである。
そのケーブル保持部材12は、ローラ滑車10の台座16の中央部から回転自在に吊り下げられた保持部材用吊下体11の下端にボルト24で取り付けられ、垂下する細長い1本のケーブル保持板25と、そのケーブル保持板25に対してボルト26とナット27とでそれぞれ取り付けられ、複数本の上下に並列されたケーブル15をケーブル保持板25とで挟持状態に保持する2枚の挟持板28とで構成されている。
【0012】
さらに、ロボット走行台車31の構成について図4及び図6に基づいて説明する。
ロボット走行台車31は、台座32と、台座32の両側にそれぞれ相対向するように立設された2つの断面コ型の車軸支持体33と、2つの車軸支持体33の両内側に設けられた走行車輪34と、2つの車軸支持体33の両外側に走行車輪34と同軸に設けられプーリ35とを有して形成されている。そして、ロボット走行台車31のプーリ35が溶接ロボット30に組み込まれた駆動モータ36とベルト37で接続されている。
従って、溶接ロボット30に組み込まれた駆動モータ36が制御装置4からの駆動制御信号により駆動されると、駆動モータ36の回転がベルト37を介してプーリ35に伝えられ、プーリ35の回転に伴って走行車輪34が回転し、溶接ロボット30と一体のロボット走行台車31がI型レール8を走行することになる。
【0013】
次に、本発明の実施形態1のケーブル収納機構の動作について説明する。
(1)溶接ロボット30は、当初はフロア2の側部直下にあるI型レール8から吊り下げられ、I型レール8の始端位置である格納位置にある。
(2)次に、溶接ロボット30がワークに対して溶接を行うために、溶接ロボット30の駆動モータ36が駆動されてロボット走行台車31が自走し、ロボット走行台車31に吊り下げられている溶接ロボット30がI型レール8を格納位置から溶接位置に向けて走行する。このとき、動力装置3や制御装置4と溶接ロボット30とを接続している複数本のケーブル15も同時に繰り出される必要がある。
(3)そこで、溶接ロボット30がI型レール8を格納位置から溶接位置に向けて走行すると、溶接ロボット30に接続されている複数本のケーブル15を保持している複数のケーブル走行用部材9のうち、溶接ロボット30に一番近いケーブル走行用部材9が溶接ロボット30に牽引され、図4に示すようにケーブル走行用部材9のローラ滑車10の上段ローラ21がI型レール8を走行する。
【0014】
(4)また、溶接ロボット30に一番近いケーブル走行用部材9よりも下流側に位置するその他のケーブル走行用部材9は、そのローラ滑車10の下段ローラ17がローラ滑車テーブル6のハンガーレール7を走行する。
こうして、複数のケーブル走行用部材9が渦巻き状のハンガーレール7を渦巻き型に回りながら走行し、ハンガーレール7の下側に位置するケーブル走行用部材9のケーブル保持部材12に保持されている複数本のケーブル15も渦巻き型に回りながら繰り出されることとなる。
(5)そして、複数のケーブル走行用部材9が渦巻き状のハンガーレール7を渦巻き型に回りながら走行し、それぞれがI型レール8の始端部位置にくると、それぞれのケーブル走行用部材9は、そのローラ滑車10の上段ローラ21がI型レール8を走行し、最終的には、ローラ滑車テーブル6のハンガーレール7の始端位置にあったケーブル走行用部材9がハンガーレール7の終端位置にきた後に、そのローラ滑車10の上段ローラ21がロボット格納用のI型レール8を走行し、溶接ロボット30がワークの位置にきたところで溶接ロボット30の走行を停止し、それに伴い複数のケーブル走行用部材9の走行も停止する。
【0015】
(6)溶接ロボット30によるワークに対する溶接が終了すれば、今度は溶接ロボット30がワークの位置からI型レール8の始端位置に向けて自走する。
そうすると、今度は逆にまずI型レール8の始端位置にあったケーブル走行用部材9がI型レール8を走行し、I型レール8の始端位置からハンガーレール7の終端位置に移り、その後はハンガーレール7の始端位置に向けて走行する。
それ以外の複数のケーブル走行用部材9も引き続きI型レール8を走行し、I型レール8の始端位置からハンガーレール7の終端位置に移り、その後はハンガーレール7のそれぞれの元の位置に向けて走行し、渦巻き型に移動しながら収納される。そして、最後に溶接ロボット30がI型レール8の始端位置である格納位置に戻ることになる。
なお、フロア2のケーブル通し穴2aから周辺装置3及び制御装置4に接続されている複数本のケーブル15が垂れ下がっているところでハンガーレール7の渦巻きの回数分だけ捩れることになるが、垂れ下がりの高さが高くなれば捩れの回数が増えてもケーブル15は痛むことはない。
【0016】
上記本発明の実施の形態1の渦巻き式ケーブル収納機構は、架台1から所定の高さに設置されたフロア2上に動力装置3及び制御装置4が搭載され、フロア2からローラ滑車テーブル6が複数のハンガー5により水平に吊り下げられ、そのローラ滑車テーブル6は中心部の始端から外周縁部の終端に切り抜き溝を渦巻き状に切って形成したハンガーレール7を有し、フロア2の側部直下に他端がワークまで延びているI型レール8の一端が配置させられ、そのI型レール8の一端が上方でハンガーレール7の終端が下方となるように重ね合わせられ、ハンガーレール7上を所定間隔を置いて配置された複数のケーブル走行用部材9は、上段にI型レールを走行するI型レール用滑車21を、下段にハンガーレール7上を走行するハンガーレール用滑車17を有するローラ滑車10と、ローラ滑車10からハンガーレール7の切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体11と、保持部材用吊下体11に吊り下げられて複数のケーブル15を保持するケーブル保持部材12とからなり、隣接するケーブル走行用部材9同士をロッド13で回動自在に連結し、I型レール8に自走する溶接ロボット30を設けているので、溶接ロボット30がI型レール8をワークに向けて自走すると、ローラ滑車テーブル6のハンガーレール7上を所定間隔を置いて配置された複数のケーブル走行用部材9がハンガーレール7の終端に向けて渦巻き型に走行し、ハンガーレール7の終端を通過したケーブル走行用部材9は今度はI型レール8を走行し、これらケーブル走行用部材9に保持されている複数本のケーブル15が自動的にI型レール8に向けて繰り出され、今度は溶接ロボット30がI型レール8をハンガーレール7に向けて自走すると、複数のケーブル走行用部材9がハンガーレール7の始端に向けて渦巻き型に走行し、I型レール8を通過したケーブル走行用部材9は次にハンガーレール7を走行し、これらケーブル走行用部材7に保持されている複数本のケーブル15が自動的にハンガーレール7に向けて巻き戻され、複数本のケーブル15の収納が、人手を掛けずに自動的に、しかも滑らかに簡便に行うことができ、しかも複数本のケーブル15は渦巻き状に収納されるため、ケーブル収納機構を小面積のスペースで構成することができる。
【0017】
上記実施の形態1の渦巻き式ケーブル収納機構の自走するロボットは溶接ロボットしているが、溶接ロボットに限らず、ワークに対して何らかの作業する作業ロボットであればよいことはいうまでもない。
【図面の簡単な説明】
【0018】
【図1】本発明の実施の形態1のケーブル収納機構の概略構成を示す斜視図。
【図2】同ケーブル収納機構のローラ滑車テーブルの概略構成を示す平面図。
【図3】同ケーブル収納機構の概略構成を示す側面図。
【図4】同ケーブル収納機構のローラ滑車の乗り移り部を示す説明図。
【図5】同ケーブル収納機構のケーブル走行用部材の構成を示す説明図。
【図6】同ケーブル収納機構のロボット走行台車の構成を示す説明図。
【符号の説明】
【0019】
1 架台、2 フロア、3 動力装置、4 制御装置、5 ハンガー、6 ローラ滑車テーブル、7 ハンガーレール、8 I型レール、9 ケーブル走行用部材、10 ローラ滑車、11 保持部材用吊下体、12 ケーブル保持部材、13 ロッド、15 ケーブル、17 ハンガーレール用滑車、21 I型レール用滑車、24 ボルト、25 ケーブル保持板、26 ボルト(締着部材)、27 ナット(締着部材)28 挟持板。
【特許請求の範囲】
【請求項1】
架台から所定の高さに設置されたフロアと、
フロアに搭載された動力装置及び制御装置と、
フロアから水平に吊り下げられ、中心部の始端から外周縁部の終端まで切り抜き溝を渦巻き状に切って形成したハンガーレールを有するローラ滑車テーブルと、
フロアの側部直下に取り付けられ、一端はハンガーレールの終端が下方となるように重ね合わせられ、他端がワークまで延びているI型レールと、
I型レールを自走する作業ロボットと、
動力装置及び制御装置と作業ロボットとを接続する長尺な複数本のケーブルと、
上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材と、
隣接するケーブル走行用部材同士を回動自在に連結する複数のロッドと、
を備えてなることを特徴とするケーブル収納機構。
【請求項2】
前記ケーブル保持部材は、1枚のケーブル保持板と、該ケーブル保持板とで複数のケーブルを上下に並列状態に挟持する複数の挟持板と、ケーブル保持板と複数の挟持板とを締着する締着部材とからなることを特徴とする請求項1記載のケーブル収納機構。
【請求項1】
架台から所定の高さに設置されたフロアと、
フロアに搭載された動力装置及び制御装置と、
フロアから水平に吊り下げられ、中心部の始端から外周縁部の終端まで切り抜き溝を渦巻き状に切って形成したハンガーレールを有するローラ滑車テーブルと、
フロアの側部直下に取り付けられ、一端はハンガーレールの終端が下方となるように重ね合わせられ、他端がワークまで延びているI型レールと、
I型レールを自走する作業ロボットと、
動力装置及び制御装置と作業ロボットとを接続する長尺な複数本のケーブルと、
上段にI型レールを走行するI型レール用滑車を、下段にハンガーレール上を走行するハンガーレール用滑車を有するローラ滑車と、該ローラ滑車から前記ハンガーレールの切り抜き溝を通過して回転自在に吊り下げられた保持部材用吊下体と、該保持部材用吊下体に吊り下げられて複数のケーブルを保持するケーブル保持部材とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材と、
隣接するケーブル走行用部材同士を回動自在に連結する複数のロッドと、
を備えてなることを特徴とするケーブル収納機構。
【請求項2】
前記ケーブル保持部材は、1枚のケーブル保持板と、該ケーブル保持板とで複数のケーブルを上下に並列状態に挟持する複数の挟持板と、ケーブル保持板と複数の挟持板とを締着する締着部材とからなることを特徴とする請求項1記載のケーブル収納機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−312415(P2008−312415A)
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2007−160297(P2007−160297)
【出願日】平成19年6月18日(2007.6.18)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成19年6月18日(2007.6.18)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
[ Back to top ]