
ケーブル曲率分布生成システム及びそのコンピュータプログラム、並びにケーブルの曲率分布生成方法
【課題】生成される曲率分布の精度を向上させる。
【解決手段】ケーブルの曲率分布を生成するシステムであって、ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部31と、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部32と、を備えている。システムは、さらに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部を備えており、各点の検出誤差によるノイズを抑制することができる。
【解決手段】ケーブルの曲率分布を生成するシステムであって、ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部31と、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部32と、を備えている。システムは、さらに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部を備えており、各点の検出誤差によるノイズを抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ケーブルの曲率分布生成システム及びそのコンピュータプログラム、並びにケーブルの曲率分布生成方法に関するものである。
【背景技術】
【0002】
自動車や産業機器等には、信号送信や電力供給のためのケーブルが用いられている。このようなケーブルには、複数の導電金属製の素線を撚り束ねたものや、素線を撚り束ねたものを芯線として複数本撚り束ね、一本のケーブルを構成したもの等がある。
このようなケーブルには、自動車のドア部等の屈曲可動部分に配索されるものもあり、そのような場合、屈曲可動部分の屈曲動作に伴って複雑に屈曲したり捻れたりし、繰り返し変形することで断線に至ることがある。
【0003】
このようなケーブルの変形を評価するために、屈曲したケーブルの長手方向における曲率分布を求めることが求められている。本発明者は、ケーブルの曲率分布を求める手法について、特許文献1にて提案している。
【0004】
特許文献1記載の手法では、まず、ケーブルがCTスキャナで撮像され、複数の断面画像データが取得される。その断面画像データから、ケーブル断面の中心位置が検出される。そして、複数の中心位置からケーブル長手方向の曲率分布が生成される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−205802号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明者は、さらに研究を進めた結果、生成される曲率分布の精度向上のための新たな着想を得た。つまり、断面画像データからケーブル断面の中心位置を画像処理により検出する際に、当該中心位置の検出誤差が生じ、その検出誤差がノイズとなることがある。本発明者は、このノイズを低減させると、曲率分布の精度を向上できることを見出した。
【0007】
本発明は、かかる観点からなされたものであり、生成される曲率分布の精度向上を目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、ケーブルの曲率分布を生成するシステムであって、ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部と、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部と、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部と、を備えているケーブル曲率分布生成システムである。
上記本発明によれば、ケーブルの複数の点それぞれについて、検出誤差が生じても、その検出誤差によるノイズを、平滑化処理によって抑制することができる。
【0009】
(2)前記平滑化処理部は、複数のケーブル曲げ方向ごとに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行うのが好ましい。この場合、ケーブル曲げ方向ごとの平滑化処理が可能である。
【0010】
(3)前記曲率分布生成部は、複数のケーブル曲げ方向ごとの曲率分布を示す複数の方向成分別曲率分布を生成するのが好ましい。この場合、曲率分布を曲げの方向を考慮して評価することができる。例えば、ケーブルを左右に繰り返し曲げた場合の曲率変化の的確な把握に好適である。例えば、ケーブルを左右に同程度繰り返し曲げた場合を想定する。ここで、左に曲げた場合の曲率をKLとし、右に曲げた場合の曲率をKRとする。この場合、曲げの方向を考慮しない絶対曲率で考えると、KL=KRであり、ケーブルを左に曲げた状態から右に曲げた状態に変化させても、絶対曲率は変化しない(ΔK=KL−KR=0)。
一方、方向成分別曲率分布であれば、KL=−KRであり、左に曲げた状態から右に曲げた状態に変化させると、ΔK=KL−KR=2KLであり、曲率変化の的確な把握が可能となる。
【0011】
(4)前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行うことができる。
【0012】
(5)前記複数の点の前記位置情報は、それぞれ、局所座標における座標値として示され、前記複数の点に対応する複数の前記局所座標は、それぞれ、各位置情報が示す点又はその近傍におけるケーブル長手方向が第1の座標軸方向として設定され、他の第2及び第3の座標軸方向が、前記第1の座標軸方向に直交する平面内に設定された3次元座標であり前記曲率分布生成部は、複数のケーブル曲げ方向ごとの方向成分別曲率分布を生成するのが好ましい。
【0013】
(6)前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表されたものであり、前記平滑化処理部は、前記局所座標における前記第2座標軸方向及び第3座標軸方向ごとに、前記変位の平滑化処理を行うのが好ましい。
【0014】
(7)前記曲率分布生成部は、複数の点それぞれの曲率を、局所座標における座標値の2次微分値として算出するのが好ましい。この場合、複数の点の位置情報から、方向成分ごとの曲率を容易に得ることができるとともに、演算速度が向上し、大量データの処理に適したものとなる。
【0015】
(8)前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表され、前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行うのが好ましい。
【0016】
(9)前記曲率分布生成部は、平滑化処理がなされた複数の方向成分別別曲率分布に基づいて、絶対曲率分布を生成するのが好ましい。
【0017】
(10)前記平滑化処理部は、曲率分布生成の対象となっているケーブルの長手方向範囲を複数に分割した区間毎に、平滑化処理を行うのが好ましい。
【0018】
(11)他の観点からみた本発明は、コンピュータを、(1)項〜(10)項のいずれか1項に記載のケーブル曲率分布生成システムとして機能させるためのコンピュータプログラムである。
【0019】
(12)さらに他の観点から見た本発明は、ケーブルの曲率分布をコンピュータにより生成する方法であって、ケーブルの長手方向における複数の点それぞれの位置情報をコンピュータが取得するステップと、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を前記コンピュータが生成するステップと、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う前記コンピュータがステップと、を含む方法である。なお、平滑化処理を行うステップは、曲率分布を生成するステップの前に行っても良いし、後に行っても良い。
【発明の効果】
【0020】
本発明によれば、生成される曲率分布の精度を向上させることができる。
【図面の簡単な説明】
【0021】
【図1】システムのハードウェア構成図である。
【図2】システムの機能ブロック図である。
【図3】(a)はケーブルの構成を示す概略図、(b)はケーブルの断面内部画像の一例を示した模式図、(c)は断面内部画像上の濃部を拡大した図である。
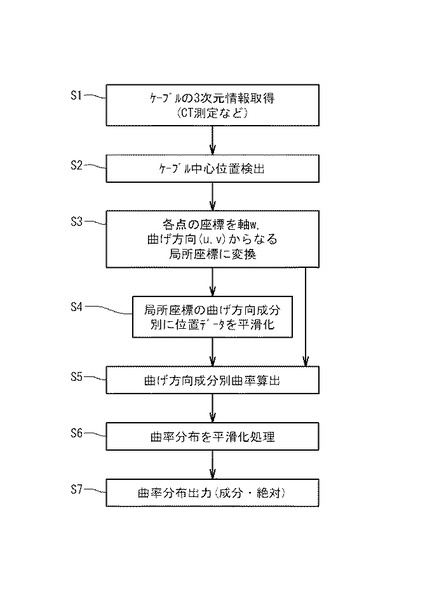
【図4】ケーブル曲率分布生成処理を示すフローチャートである。
【図5】局所座標の説明図である。
【図6】全体座標と局所座標の関係を示す図である。
【図7】変位データを示す図である。
【図8】変位データを示す図である。
【図9】区間分割を示す図である。
【図10】曲率算出の説明図である。
【図11】曲率算出の説明図である。
【図12】変位データと曲率のばらつきを示す図である。
【図13】平滑化の有無による曲率分布の違いを示す図である。
【図14】絶対曲率を示す図である。
【発明を実施するための形態】
【0022】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。
[1.ケーブル曲率分布生成システム]
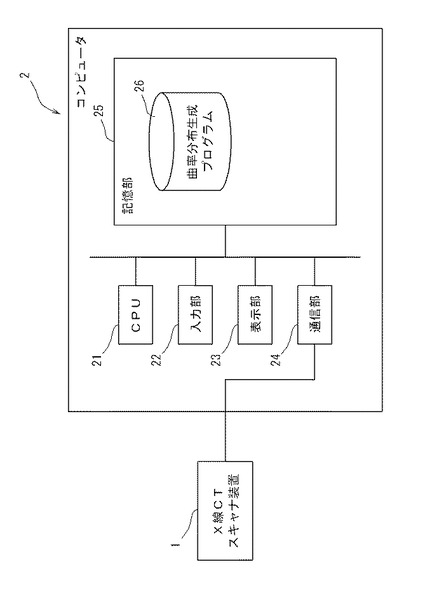
図1は、ケーブル曲率分布生成システムを示すブロック図である。システムは、被測定物であるケーブルの断面画像を取得するためのX線CTスキャナ装置(測定装置)1と、測定装置1にて得られたデータを処理するパーソナルコンピュータ(処理装置)2と、を備えている。
【0023】
パーソナルコンピュータ2は、図に示すように、各部の制御を行うCPU21、キーボードやマウス等の入力部22、ディスプレイ等の表示部23、外部機器とのデータの入出力を行うためのLAN等の通信部24、及び、メモリやハードディスク等から構成される記憶部25を備えている。
【0024】
記憶部25には、オペレーティングシステムの他、曲率分布生成プログラム26等が格納されている。曲率分布生成プログラム26がコンピュータ2によって実行されることで、コンピュータ2が曲率分布生成システムとして機能する。
また、通信部24には、X線CTスキャナ装置1が接続されており、X線CTスキャナ装置1から出力されるデータを受信する。前記曲率分布生成プログラム26は、X線CTスキャナ装置1から出力されるデータに基づいてパーソナルコンピュータ2にケーブルの曲率分布測定に係る処理を実行させる。なお、X線CTスキャナ装置1とパーソナルコンピュータとは、接続されている必要は無い。
【0025】
CTスキャナ装置1は、被測定物であるケーブルの長手方向に沿った複数の断面内部画像を生成する。そして、CTスキャナ装置1は、取得した被測定物の断面内部画像データをパーソナルコンピュータ2に対して出力する。そして、パーソナルコンピュータ2は、前記断面画像データを通信部24により受信し、記憶部25に保存する。記憶部25に格納された曲率分布生成プログラム26は、上述したように、X線CTスキャナ装置1から出力されるデータに基づいて、パーソナルコンピュータ2に、ケーブルの曲率分布生成に係る処理を実行させる。
【0026】
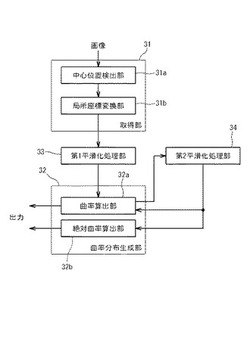
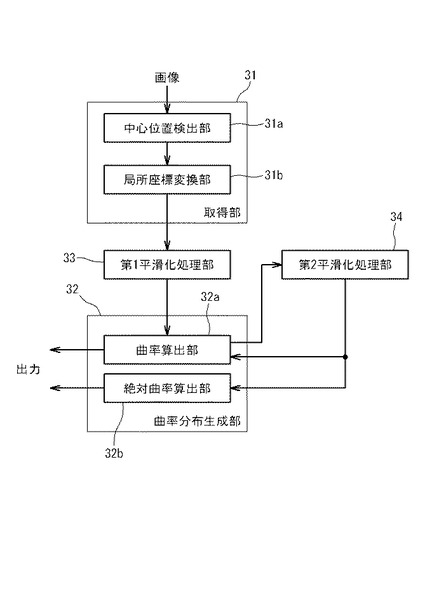
図2は、曲率分布生成プログラム26に基づく曲率分布生成システムのブロック図を示している。このシステムは、ケーブル4の長手方向における複数の点それぞれの位置情報を取得する取得部31と、前記ケーブル4の長手方向における曲率分布を生成する曲率分布生成部32と、第1及び第2の平滑化処理部33,34を備えている。
【0027】
次に、上記構成を有する形状状態測定システムによって実現される、ケーブルの曲率分布の生成方法について説明する。図3(a)は、前記曲率分布生成方法における測定対象となるケーブルの構成を示した概略図であり、図4は、前記曲率分布生成方法を示すフローチャートである。
【0028】
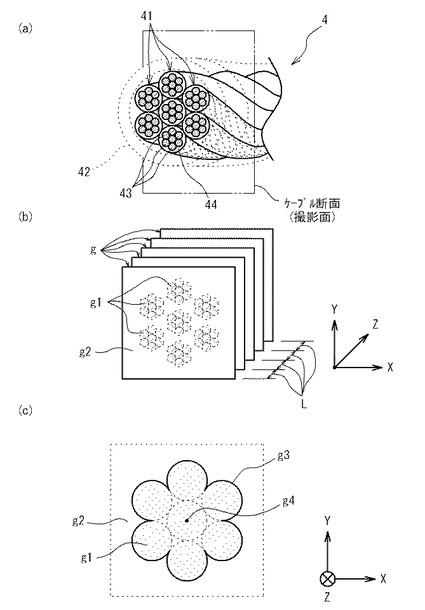
図3(a)において、ケーブル4は、その内部に螺旋状に撚り束ねられた7本の芯線41と、その外周側を覆う絶縁体からなる外部被覆層42とを有している。また、各芯線41は、7本の銅線等の導電金属線材を螺旋状に撚り束ねた素線43と、その外周側を覆う絶縁体からなる被覆層44とにより構成されている。すなわち、各芯線41は、それぞれ独立して信号伝達や電力供給を行うことができるように構成されており、一本のケーブル4によって、多数の信号伝達や電力供給を行えるように構成されている。
なお、ケーブル4を構成している芯線41、芯線41を構成している素線43においても、それぞれ、信号送信や電力供給のためのケーブルとみなすことができる。
【0029】
[2.曲率分布生成方法]
以下、上記構成のケーブル4の曲率分布の生成方法について、図4のフローチャートに基づいて説明する。
[2.1 ケーブルの3次元情報取得]
まず、上記構成のケーブル4を、治具等によって、実機に配索された状態を再現するように屈曲変形させて固定し、それをX線CTスキャナ装置1で撮影する。これにより、ケーブル4の断面内部画像(ケーブル4の3次元情報)を取得する(ステップS1)。
図3(b)にケーブル4の断面内部画像の一例を示す。図3(b)中の断面内部画像gは、図3(a)のように、X線CTスキャナ装置1による撮影面Aをケーブル4と交差させ断面内部を透過撮影したものである。これらの断面内部画像gは、コンピュータに読み込み可能な画像データとして取得される。
【0030】
また、図3(b)の断面内部画像gは、周囲よりも濃く(暗く)現れる図中破線で示した濃部g1と、濃部g1よりも薄い(明るい)淡部g2とで現される濃淡画像として得られるものであり、本実施形態の場合、ケーブル4において7本の素線43が撚り束ねられた芯線41の断面像が7箇所の濃部g1として現れている。断面内部画像gは、X線の吸収率の差によって、導電金属線材からなる素線43と、被覆層42,44を含むその他の部分と、の間で大きくコントラストが生じるものであり、素線43の部分を濃部として表した場合、その他の部分は淡部として現れ、図3(b)のように芯線41の断面内部を濃部g1として認識することができる。
【0031】
なお、一般にX線画像は、X線吸収率の高い部分が明るく現れ、吸収率の低い部分が暗く現れるため、ケーブル4の撮影像は、金属である素線43が存在する部分が明るい淡部、他の部分が暗い濃部となって得られるのであるが、本実施形態の断面内部画像gでは、淡部と濃部とを反転させることで、素線43(芯線41)の断面像が濃部、他の部分が淡部となるように示し、素線43の断面像をより明瞭に把握できるようにしている。
【0032】
なお、複数の断面内部画像gが並ぶ方向(ケーブルの長手方向にほぼ対応する)を、Z軸方向とし、Z軸方向に直交する一の方向をX軸方向とし、Z軸方向及びX軸方向に直交する方向をY軸方向とする。また、以下では、このXYZ3次元座標を、全体座標という。
【0033】
X線CTスキャナ装置1は、Z方向において所定の幅寸法に設定された測定範囲内を所定のピッチ間隔(一定の間隔)Lで、撮影する。これにより、ケーブル4のZ方向における複数の断面内部画像gが得られる。図3(b)は、Z方向に連続して撮影された複数の断面内部画像gを模式的に示しており、図中各矢印は、X,Y,Z方向を示している。断面内部画像gは、X−Y平面に対して平行であるとともに、Z方向に沿って一定のピッチ間隔Lで連続的に複数枚撮影される。
ここで、ケーブル4の長手方向と、全体座標におけるZ方向と、は、できるだけ一致しているのが好ましいが、ケーブル4は、屈曲変形しているので、両者は必ずしも一致していない。
なお、ケーブル4の3次元情報は、CTスキャナ装置4によって断面画像として取得するほか、3次元読み取り装置等によってケーブルの複数の点の座標値を読み取っても良い。
【0034】
上記ステップS1にて取得された複数の断面内部画像gは、X線CTスキャナ装置1からコンピュータ2に送信される。そして、コンピュータ2は、送信された複数の断面内部画像gを通信部24により受信する。
その後、コンピュータ2のCPU21は、曲率分布生成プログラム26に基づいて、以下の処理(ステップS2〜S7)を実行する。
【0035】
[2.2 ケーブル中心位置検出]
まず、取得部31の中心位置検出部31aは、複数の断面内部画像gそれぞれについて、ケーブル4の中心位置を検出する(ステップS2)。中心位置検出部31aとして機能するCPU21は、コンピュータ2の記憶部25に格納した複数の断面内部画像gそれぞれについて、画像処理等によって濃淡画像から2値化画像に変換させる。そして、画像g中、ケーブル4の部分を示す濃部g1の輪郭を示す境界線g3の2次元データを取得する。
【0036】
次に、CPU21は、ケーブル4の断面形状である境界線g3の2次元データから、ケーブル中心位置g4を特定する。中心位置は、例えば、境界線g3の2次元データから、当該境界線g3で囲まれた領域の面積中心を求めることで、特定することができる。
本実施形態において、ケーブル中心位置g4は、各画像gにおけるケーブル4の位置を示す基準位置となる。なお、各画像gにおけるケーブル4の位置は、ケーブル4の他の位置を基準として定めても良い。
【0037】
ここで、複数の断面内部画像gは、X−Y平面に平行かつZ方向に沿ってピッチ間隔Lで連続的に撮影されているため、各断面内部画像gに対してはそれぞれZ方向における座標値を割り当てることができる。従って、CPU21は、上記各断面内部画像g上の点である断面中心g4のX−Y座標値に、それぞれ対応するZ座標値を割り当て、断面中心g4におけるX−Y−Zの3方向の3次元座標値を取得できる。
つまり、CPU21は、画像gに対応するケーブル4の長手方向における複数の点iについて、全体座標における3次元座標値(位置情報)を取得できる。複数の点iについて、全体座標における3次元座標値(位置情報)は、記憶部25に格納される。
なお、複数の断面内部画像gのZ方向におけるそれぞれの間隔を予め把握しておけば、複数の断面内部画像gのZ方向の間隔を一定のピッチ間隔とせずとも、各断面中心g4のX−Y座標値に対応するZ座標値を特定することができる。
【0038】
上記のように得られたケーブル中心位置g4の座標値には、画像gにおける中心位置検出の際の検出誤差がノイズとして含まれることがある。
【0039】
[2.3 全体座標から局所座標への変換]
続いて、取得部31の局所座標変換部31bは、複数の中心位置g4(点i)それぞれの座標値(全体座標での座標値)を、以下に説明する局所座標の座標値(位置情報)に変換する(ステップS3)。
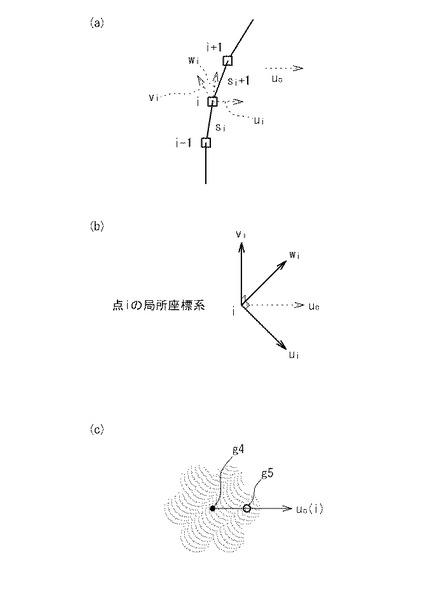
局所座標は、u軸、v軸、w軸を有する3次元直交座標であり、点iを局所座標原点とする局所座標の各軸を、ui軸,vi軸、wi軸と表すこととする。なお、以下では、ui,vi、wiは、局所座標の軸を表すだけでなく、各軸方向の単位ベクトルを表す場合がある。
【0040】
図5(a)に示すように、任意の点iの局所座標のwi軸は、点iに隣接する点(一つ手前の点)i−1から、点iに向かう方向に一致するように設定される。すなわち、全体座標からみると、各点iを原点とする局所座標におけるwi軸は、それぞれ、ケーブルの屈曲により、異なる方向を向き得る。
【0041】
各局所座標のui軸及びvi軸は、各局所座標におけるwi軸に直交する平面内に設定される。
各局所座標のui軸は、iの変化によっては大きく変化しないか、又は、点iの位置の変化に応じて連続的に変化し、かつ、wi軸と直交するベクトルの方向に設定される。各局所座標のvi軸は、ui,wi軸と直交するベクトルの方向に設定される。
ui軸及びvi軸を設定するには、例えば、図5(b)に示すように、曲率の算出対象となっている全ての点iのwi軸に対して、平行とならない固定の単位ベクトルu0を予め規定しておく。そして、vi=wi×u0のベクトル演算、及び、ui=vi×wiのベクトル演算により、ui軸及びvi軸の方向を持つ単位ベクトルを算出すればよい。なお、上記ベクトル演算式において「×」は、外積を求めるためのベクトル演算記号である。
【0042】
また、ui軸及びvi軸を設定するには、例えば、図5(c)に示すように、ケーブル4の中心位置g4(位置i)からみた特定位置、例えば、特定の素線43の中心位置g5への単位ベクトルをu0(i)として規定しておく。そして、上記と同様に、vi=wi×u0(i)のベクトル演算、及び、ui=vi×wiのベクトル演算により、ui軸及びvi軸の方向を持つ単位ベクトルを算出すればよい。
【0043】
各点iの局所座標の設定の仕方は、上記のものに限られないが、事後的に局所座標値を全体座標値に変換したり、局所座標でのケーブル形状状態を評価したりできるように、所定のルールに基づいて、一意に決定されるものであればよい。なお、例示した局所座標の設定の仕方によれば、ui軸及びvi軸は、wi軸の方向の連続的な変化に応じて、その方向が連続的に変化するため、点iの位置の変位や曲率を算出するのに適切であるとともに、後述の平滑化にも適切なものとなっている。
【0044】
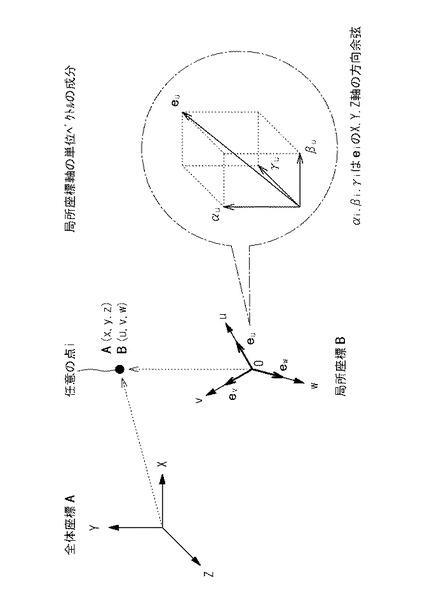
局所座標変換部31bとして機能するCPU21は、記憶部25に格納されている全体座標での点iの位置情報(座標値)を、下記式に基づく演算により、上記のように設定される局所座標における座標値に変換する。複数(4以上)の点iの局所座標における座標値(位置情報)は、記憶部25に格納される。
【数1】

ここで、Aは、任意の点iについての全体座標における座標値(ベクトル値)であり、Bは、局所座標における座標値(ベクトル値)であり、oは、前記局所座標の原点の全体座標における座標値(ベクトル値)であり、eu,ev,ewは、前記局所座標軸u,v,wの単位ベクトルである。A,B,o,eu,ev,ewは、それそれ、次のように定義される(図6参照)。
【数2】
【数3】
【0045】
本実施形態では、点i+1の座標値を示す局所座標の原点は、点iが採用される。したがって、局所座標における点i+1の座標値Bは、隣接する点(一つ手前の点)iからみた、点i+1の変位量を示すことになる。より具体的は、座標値Bは、隣接する点iからみた、ui軸方向の変位と、vi軸方向の変位と、を示しており、これらの変位は、点i+1におけるケーブル4の曲げ度合いを示す情報となっている。また、当然ながら、座標値Bは、wi軸方向の変位も示している。
なお、点i+1の座標値を示す局所座標の原点は、点iに限定されるものではなく、点i+1近傍の他の点であってもよい。
【0046】
本実施形態では、点i+1の座標値を示す局所座標のwi軸の方向は、点i−1から点iに向かう方向としたが、点i−1から点i+1に向かう方向、又は、点iから点i+1に向かう方向などとしても良い。つまり、点i+1の座標値を示す局所座標のw軸の方向は、点i+1又はその付近のケーブル4の長手方向にほぼ沿っていればよい。
【0047】
[2.4 位置データの平滑化]
第1平滑化処理部33は、各点iの局所座標値の平滑化を行うことで、前記ノイズ(検出誤差)の除去/抑制を行う(ステップS4)。まず、第1平滑化処理部33として機能するCPU21は、記憶部25に格納されている複数の点iの局所座標での座標値(位置情報)を用いて、ui軸方向、vi軸方向ごとの変位データを生成する。
ui軸方向の変位データは、ケーブル4上での長手方向位置を示す指標値Li(ケーブル端部からの距離など)が示す位置(点i)におけるケーブル4のui軸方向変位(隣接する点i−1からの変位)を示すものである。つまり、ui軸方向の変位データは、複数の点iの局所座標値におけるui軸の値の集合から構成される。
vi軸方向の変位データは、前記指標値Liが示す位置(点i)におけるケーブル4のvi軸方向変位(隣接する点i−1からの変位)を示すものである。つまり、vi軸方向の変位データは、複数の点iの局所座標値におけるvi軸の値の集合から構成される。
【0048】
CPU21は、これらのui軸方向、vi軸方向ごとの変位データそれぞれに対して、平滑化処理(第1の平滑化処理)を行う。第1の平滑化処理により、中心位置の検出誤差により生じた変位データそれぞれの脈動を抑制する。平滑化処理は、検出誤差が、ほぼサンプリング周波数で発生するという特徴を用いて行う。
【0049】
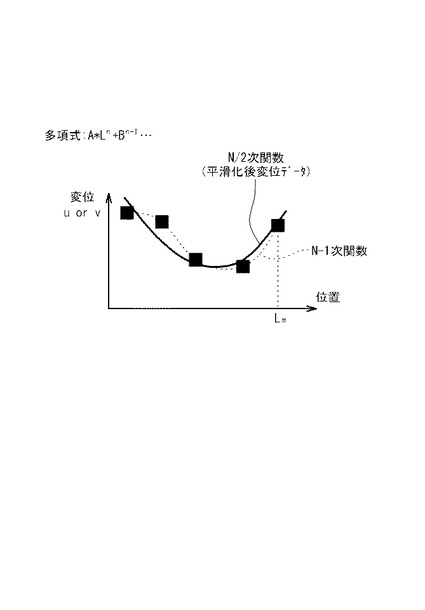
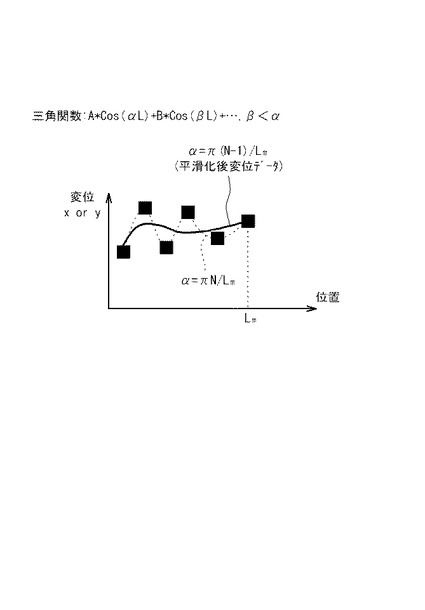
第1の平滑化処理は、例えば、変位データを、その変位データの脈動に追従しない関数(1回微分して0にならない関数)で近似し、その近似関数を平滑化された変位データとすることで行われる。
近似関数を多項式とする場合、点iの数Nに対して、N/2次以下の多項式とするのが好ましい。図7は、方向ごとの変位データ(N−1次関数)を、N/2次関数で近似した様子を示している。図7から明らかなように、N/2次関数で近似することで、変位データは、脈動が少なくなっている。
【0050】
近似関数を三角関数(sin関数,cos関数)とする場合は、基底関数を、sin(αL),cos(αL)として、α≦π(N−1)/Lm(ここで、Lmは、Liの最大値)とする)とするのが好ましい。図8は、方向ごとの変位データ(基底関数におけるα=πN/Lm)を、基底関数におけるα=π(N−1)/Lmとした近似関数で近似した様子を示している。図8においても、変位データの脈動が少なくなっている。
【0051】
なお、第1の平滑化処理は、近似関数による近似のほか、ローパスフィルタによって脈動を抑制/除去することによっておこなってもよい。
【0052】
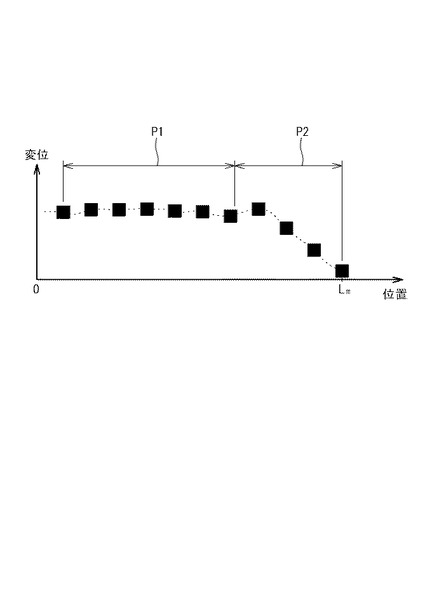
また、図8に示すように、複数の点iが属するケーブル範囲(曲率分布生成の対象となっているケーブルの長手方向範囲;Li=0〜Lm)を、複数の区間P1,P2に分割しておき、複数に分割した区間毎に、上述のような平滑化処理を行っても良い。ケーブル4の大部分が直線状で、ケーブル端部だけが部分的に屈曲しているような場合のように、単一の近似関数で近似するのが困難な場合もある。このような場合であっても、第1平滑化処理部33では、複数の区間への分割と、区間毎に異なる近似関数の適用と、を行うことで、適切な平滑化を行うことができる。なお、複数区間への分割は、システムユーザからの分割ポイントの指定を受けて行っても良いし、よい近似が得られない場合に、第1平滑化処理部33が自動的に行ってもよい。
【0053】
なお、複数の区間P1,P2それぞれの近似関数は、曲率の連続性を保持するため、区間P1,P2の境界において1次微分値がほぼ等しくなるものを用いるのが好ましい。
【0054】
変位データには、検出誤差等により生じた位置変動誤差が含まれているが、上記のような平滑化処理を行うことで、変位データから算出される曲率の誤差を抑制できる。
平滑化処理された変位データは、記憶部25に格納される。
【0055】
[2.5 曲げ方向成分別の曲率算出]
[2.5.1 第1の曲率算出方法(外接円近似)]
曲率分布生成部32の曲率算出部32aは、記憶部25に格納された平滑化処理後の変位データから、各方向ui,viごとの曲率分布を生成する(ステップS5)。
曲率算出部32aとして機能するCPU21は、まず、平滑化処理されたui軸方向、vi軸方向ごとの変位データ(位置情報)を、全体座標における各点iごとの座標値(位置情報)に戻す。そして、CPU21は、複数の点iの中の任意の点iの曲率を求める場合、その点iの両隣の点i−1,i+1の座標を、それぞれ、その点iを原点とする局所座標の座標値に変換する。
【0056】
さらに、CPU21は、点i−1,i+1の局所座標値から、外接円の式に基づき、点iの曲率を算出する。曲率の算出は、局所座標のvi−wi面に投影した曲率Ku,ui−wi面に投影した曲率Kvそれぞれついて別々に行われる。つまり、複数の方向成分ごとの曲率Ku,Kvが算出される。なお、vi−wi面に投影した曲率Kuについては、各点についてのui軸の座標値を0として演算すればよい。
点iにおける曲率Ku,Kvの算出は、例えば、外接円の式を用いて行うことができる。
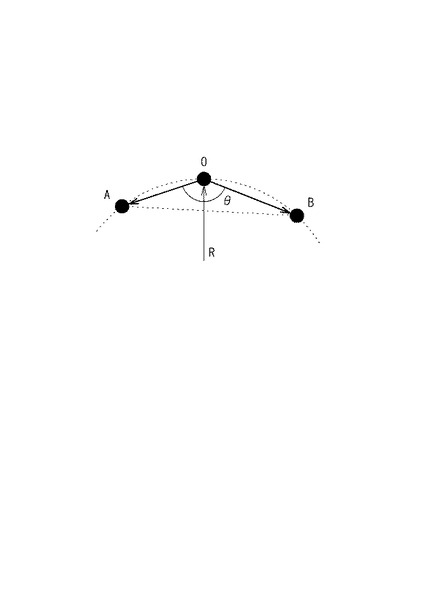
外接円の式による曲率の算出には、図10に示すように、点i−1をA、点iをO,点i+1をBとし、ベクトルOA,OBを算出する。そして、OA,OBの角度を算出する。OA,OBの角度θは、cosθ=OA・OB/((|OA|)|OB|)により求めることが可能である。
この角度θを用いて、外接円の式(R=|AB|/sinθ)により、曲率半径Rを算出できる。そして、この曲率半径Rより、曲率K=1/Rを求めることができる。
【0057】
[2.5.2 第2の曲率算出方法(ケーブル軸(w軸)からの変化量2次微分換算)]
各軸ui,viまわりの曲率Ku,Kvは、次の式によって求めることもできる。
【数4】
【0058】
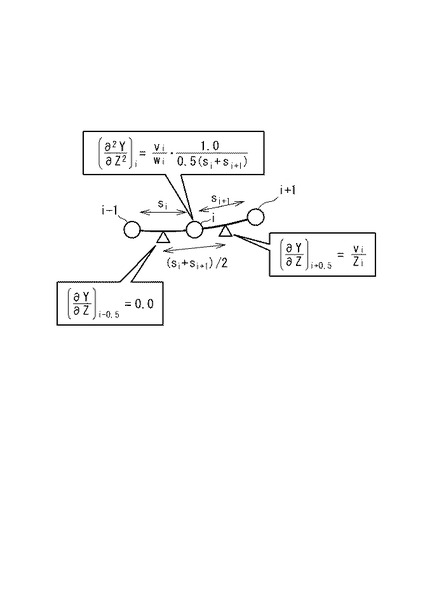
上記式によって曲率Ku,Kvを求めるには、まず、第1の平滑化処理後の変位データを用いて、点iと点i+1間のZ微分値を、次のように求める。
【数5】
【0059】
点i−1,点iにおける微分値は、先の定義上、
【数6】
である。
したがって、点i−1から点i間の距離をsiとし、点iから点i+1間の距離をsi+1とすると、数値解析手法における差分法に基づき、曲率Ku,Kv≒2次微分値は、下記にように算出できる(図11参照)。
【数7】
【0060】
上記のようにして各点iについて算出された曲率Kuからなる曲率分布(第1の方向成分別別曲率分布)と、各点iについて算出された曲率Kvからなる曲率分布(第2の方向成分別曲率分布)は、記憶部25に格納される。
なお、上記演算方法は、一例であり、局所座標の定義の仕方に応じて演算方法を適宜変更すればよい。例えば、ケーブル長手方向(w軸方向)を、点i−1から点i+1に向かう方向、又は、点iから点i+1に向かう方向とした場合、それに応じて演算方法を変更すればよい。
また、形状に与えられた微分方程式を解くことができる数値解析手法として、上記では、差分法を採用したが、有限要素法などの他の数値解析手法を用いて、軸からの位置変動の2次微分(曲率成分)を求めることもできる。
【0061】
[2.6 曲率分布の平滑化]
第2平滑化処理部34は、曲率分布の平滑化を行うことで、曲率分布に含まれるノイズの除去/抑制を行う(ステップS6)。第2平滑化処理部34による平滑化処理は、平滑化の対象が異なるだけで、第1平滑化処理部34による平滑化処理と同様の処理である。
【0062】
つまり、第2平滑化処理部33として機能するCPU21は、第1及び第2の方向成分別曲率分布それぞれに対して、ui軸方向、vi軸方向ごとの変位データに対して行った第1の平滑化処理と同様の平滑化処理(第2の平滑化処理)を行う。
なお、第2の平滑化処理においても、複数区間P1,P2に分割した上での平滑化処理が可能である。
平滑化処理された第1及び第2の方向成分別曲率分布は、記憶部25に格納される。
【0063】
[2.7 曲率分布出力]
曲率分布生成部32の絶対曲率算出部32は、平滑化処理された第1及び第2の方向成分別曲率分布から、絶対曲率分布を求める。そして、曲率分布生成部32は、平滑化処理された第1・第2の方向成分別曲率分布、及び/又は、絶対曲率分布を出力する(ステップS7)。
【0064】
絶対曲率分布は、第1及び第2の方向成分別曲率分布のように、曲げ方向成分毎の曲率分布ではなく、方向とは無関係に、各点iにおけるケーブル曲率の分布を示すものである。
絶対曲率算出部32は、各点iにおける絶対曲率Kiを、Ki=Kui2+Kvi2によって算出する。
【0065】
なお、システムは、曲率分布のほか、変位データを出力してもよい。変位データは、局所座標によるものであってもよいが、ケーブル形状の評価をする上で、全体座標が好ましい場合には、下記式に基づいて、局所座標値Bを全体座標値Aに変換して出力すればよい。
【数8】
【0066】
[3.考察]
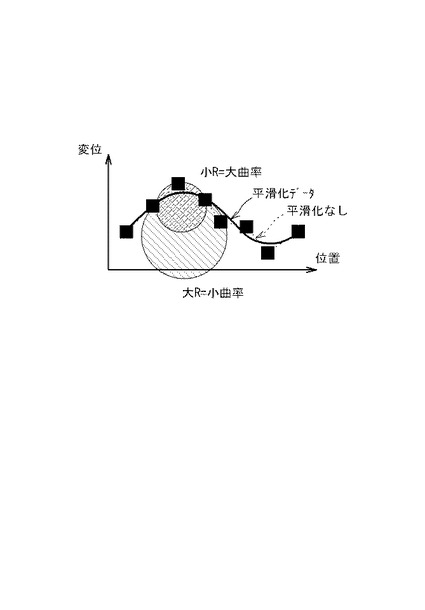
以上のような本実施形態に係る曲率分布生成システムによれば、検出誤差を含む変位データから、そのまま曲率を算出した場合の曲率のばらつきを抑えることができる。つまり、図12に示すように、変位データの脈動は、隣接する点間で曲率を大きく変動させ、曲率分布の精度を低下させる。したがって、検出誤差が大きい場合には、変位データを平滑化することで、曲率のばらつきを抑えることができる。
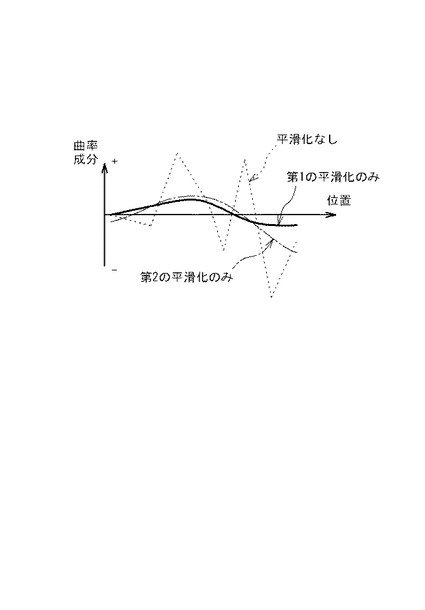
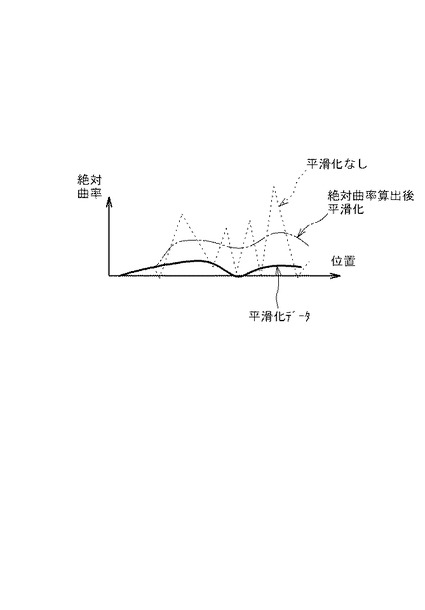
また、変位データに脈動が含まれたまま曲率を求めると、図13において「平滑化なし」のデータとして示すように、各方向成分の曲率として、極めて大きな正・負の曲率が交互に発生する。このような曲率分布から絶対曲率を求めると、図14において「平滑化なし」のデータとして示すように、絶対曲率に、極めて大きなノイズが発生する。
【0067】
これに対して、方向成分ごとに分離した変位データ又は曲率分布に対して、平滑化処理を行うと、図13において、「第1の平滑化のみ」及び「第2の平滑化のみ」のデータとして示すように、「平滑化なし」のデータに比べて、ノイズの少ない曲率分布が得られる。
また、図14において「平滑化データ」のデータとして示すように、第1又は第2の平滑化処理を行うと、「平滑化なし」のデータに比べて、ノイズを抑制した絶対曲率分布が得られる。
【0068】
図14において、「絶対曲率算出後平滑化」で示されるデータは、平滑化せずに絶対曲率分布を求めた後に、平滑化した場合のデータである。この場合、「平滑化なし」のデータにおけるノイズを平均化したノイズが残っており、「平滑化なし」よりはノイズが抑制されているものの、第1の平滑化処理又は第2の平滑化処理を行った場合よりも、ノイズ抑制効果が低下した。
したがって、第1の平滑化処理又は第2の平滑化処理のように、複数の方向成分ごとのデータ(変位データ又は曲率分布)に対して平滑化処理を行ったほうが、ノイズ抑制効果が高いことがわかる。
【0069】
本実施形態では、第1の平滑化処理と第2の平滑化処理の双方を実行しているが、いずれか一方だけであってもよい。いずれか一方の平滑化処理を実行する場合、より次数が低い曲率分布の平滑化(第2の平滑化処理)の方を実行するのが好ましい。特に、変位データにおける検出誤差が比較的小さければ、第2の平滑化処理だけでも十分である。
【0070】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0071】
2 コンピュータ
26 曲率分布生成コンピュータプログラム
31 取得部
31a 中心位置検出部
31b 局所座標変換部
32 曲率分布生成部
32a 曲率算出部
32b 絶対曲率算出部
33 第1平滑化処理部
34 第2平滑化処理部
g4 ケーブル中心位置(点)
【技術分野】
【0001】
本発明は、ケーブルの曲率分布生成システム及びそのコンピュータプログラム、並びにケーブルの曲率分布生成方法に関するものである。
【背景技術】
【0002】
自動車や産業機器等には、信号送信や電力供給のためのケーブルが用いられている。このようなケーブルには、複数の導電金属製の素線を撚り束ねたものや、素線を撚り束ねたものを芯線として複数本撚り束ね、一本のケーブルを構成したもの等がある。
このようなケーブルには、自動車のドア部等の屈曲可動部分に配索されるものもあり、そのような場合、屈曲可動部分の屈曲動作に伴って複雑に屈曲したり捻れたりし、繰り返し変形することで断線に至ることがある。
【0003】
このようなケーブルの変形を評価するために、屈曲したケーブルの長手方向における曲率分布を求めることが求められている。本発明者は、ケーブルの曲率分布を求める手法について、特許文献1にて提案している。
【0004】
特許文献1記載の手法では、まず、ケーブルがCTスキャナで撮像され、複数の断面画像データが取得される。その断面画像データから、ケーブル断面の中心位置が検出される。そして、複数の中心位置からケーブル長手方向の曲率分布が生成される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−205802号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明者は、さらに研究を進めた結果、生成される曲率分布の精度向上のための新たな着想を得た。つまり、断面画像データからケーブル断面の中心位置を画像処理により検出する際に、当該中心位置の検出誤差が生じ、その検出誤差がノイズとなることがある。本発明者は、このノイズを低減させると、曲率分布の精度を向上できることを見出した。
【0007】
本発明は、かかる観点からなされたものであり、生成される曲率分布の精度向上を目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、ケーブルの曲率分布を生成するシステムであって、ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部と、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部と、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部と、を備えているケーブル曲率分布生成システムである。
上記本発明によれば、ケーブルの複数の点それぞれについて、検出誤差が生じても、その検出誤差によるノイズを、平滑化処理によって抑制することができる。
【0009】
(2)前記平滑化処理部は、複数のケーブル曲げ方向ごとに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行うのが好ましい。この場合、ケーブル曲げ方向ごとの平滑化処理が可能である。
【0010】
(3)前記曲率分布生成部は、複数のケーブル曲げ方向ごとの曲率分布を示す複数の方向成分別曲率分布を生成するのが好ましい。この場合、曲率分布を曲げの方向を考慮して評価することができる。例えば、ケーブルを左右に繰り返し曲げた場合の曲率変化の的確な把握に好適である。例えば、ケーブルを左右に同程度繰り返し曲げた場合を想定する。ここで、左に曲げた場合の曲率をKLとし、右に曲げた場合の曲率をKRとする。この場合、曲げの方向を考慮しない絶対曲率で考えると、KL=KRであり、ケーブルを左に曲げた状態から右に曲げた状態に変化させても、絶対曲率は変化しない(ΔK=KL−KR=0)。
一方、方向成分別曲率分布であれば、KL=−KRであり、左に曲げた状態から右に曲げた状態に変化させると、ΔK=KL−KR=2KLであり、曲率変化の的確な把握が可能となる。
【0011】
(4)前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行うことができる。
【0012】
(5)前記複数の点の前記位置情報は、それぞれ、局所座標における座標値として示され、前記複数の点に対応する複数の前記局所座標は、それぞれ、各位置情報が示す点又はその近傍におけるケーブル長手方向が第1の座標軸方向として設定され、他の第2及び第3の座標軸方向が、前記第1の座標軸方向に直交する平面内に設定された3次元座標であり前記曲率分布生成部は、複数のケーブル曲げ方向ごとの方向成分別曲率分布を生成するのが好ましい。
【0013】
(6)前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表されたものであり、前記平滑化処理部は、前記局所座標における前記第2座標軸方向及び第3座標軸方向ごとに、前記変位の平滑化処理を行うのが好ましい。
【0014】
(7)前記曲率分布生成部は、複数の点それぞれの曲率を、局所座標における座標値の2次微分値として算出するのが好ましい。この場合、複数の点の位置情報から、方向成分ごとの曲率を容易に得ることができるとともに、演算速度が向上し、大量データの処理に適したものとなる。
【0015】
(8)前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表され、前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行うのが好ましい。
【0016】
(9)前記曲率分布生成部は、平滑化処理がなされた複数の方向成分別別曲率分布に基づいて、絶対曲率分布を生成するのが好ましい。
【0017】
(10)前記平滑化処理部は、曲率分布生成の対象となっているケーブルの長手方向範囲を複数に分割した区間毎に、平滑化処理を行うのが好ましい。
【0018】
(11)他の観点からみた本発明は、コンピュータを、(1)項〜(10)項のいずれか1項に記載のケーブル曲率分布生成システムとして機能させるためのコンピュータプログラムである。
【0019】
(12)さらに他の観点から見た本発明は、ケーブルの曲率分布をコンピュータにより生成する方法であって、ケーブルの長手方向における複数の点それぞれの位置情報をコンピュータが取得するステップと、前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を前記コンピュータが生成するステップと、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う前記コンピュータがステップと、を含む方法である。なお、平滑化処理を行うステップは、曲率分布を生成するステップの前に行っても良いし、後に行っても良い。
【発明の効果】
【0020】
本発明によれば、生成される曲率分布の精度を向上させることができる。
【図面の簡単な説明】
【0021】
【図1】システムのハードウェア構成図である。
【図2】システムの機能ブロック図である。
【図3】(a)はケーブルの構成を示す概略図、(b)はケーブルの断面内部画像の一例を示した模式図、(c)は断面内部画像上の濃部を拡大した図である。
【図4】ケーブル曲率分布生成処理を示すフローチャートである。
【図5】局所座標の説明図である。
【図6】全体座標と局所座標の関係を示す図である。
【図7】変位データを示す図である。
【図8】変位データを示す図である。
【図9】区間分割を示す図である。
【図10】曲率算出の説明図である。
【図11】曲率算出の説明図である。
【図12】変位データと曲率のばらつきを示す図である。
【図13】平滑化の有無による曲率分布の違いを示す図である。
【図14】絶対曲率を示す図である。
【発明を実施するための形態】
【0022】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。
[1.ケーブル曲率分布生成システム]
図1は、ケーブル曲率分布生成システムを示すブロック図である。システムは、被測定物であるケーブルの断面画像を取得するためのX線CTスキャナ装置(測定装置)1と、測定装置1にて得られたデータを処理するパーソナルコンピュータ(処理装置)2と、を備えている。
【0023】
パーソナルコンピュータ2は、図に示すように、各部の制御を行うCPU21、キーボードやマウス等の入力部22、ディスプレイ等の表示部23、外部機器とのデータの入出力を行うためのLAN等の通信部24、及び、メモリやハードディスク等から構成される記憶部25を備えている。
【0024】
記憶部25には、オペレーティングシステムの他、曲率分布生成プログラム26等が格納されている。曲率分布生成プログラム26がコンピュータ2によって実行されることで、コンピュータ2が曲率分布生成システムとして機能する。
また、通信部24には、X線CTスキャナ装置1が接続されており、X線CTスキャナ装置1から出力されるデータを受信する。前記曲率分布生成プログラム26は、X線CTスキャナ装置1から出力されるデータに基づいてパーソナルコンピュータ2にケーブルの曲率分布測定に係る処理を実行させる。なお、X線CTスキャナ装置1とパーソナルコンピュータとは、接続されている必要は無い。
【0025】
CTスキャナ装置1は、被測定物であるケーブルの長手方向に沿った複数の断面内部画像を生成する。そして、CTスキャナ装置1は、取得した被測定物の断面内部画像データをパーソナルコンピュータ2に対して出力する。そして、パーソナルコンピュータ2は、前記断面画像データを通信部24により受信し、記憶部25に保存する。記憶部25に格納された曲率分布生成プログラム26は、上述したように、X線CTスキャナ装置1から出力されるデータに基づいて、パーソナルコンピュータ2に、ケーブルの曲率分布生成に係る処理を実行させる。
【0026】
図2は、曲率分布生成プログラム26に基づく曲率分布生成システムのブロック図を示している。このシステムは、ケーブル4の長手方向における複数の点それぞれの位置情報を取得する取得部31と、前記ケーブル4の長手方向における曲率分布を生成する曲率分布生成部32と、第1及び第2の平滑化処理部33,34を備えている。
【0027】
次に、上記構成を有する形状状態測定システムによって実現される、ケーブルの曲率分布の生成方法について説明する。図3(a)は、前記曲率分布生成方法における測定対象となるケーブルの構成を示した概略図であり、図4は、前記曲率分布生成方法を示すフローチャートである。
【0028】
図3(a)において、ケーブル4は、その内部に螺旋状に撚り束ねられた7本の芯線41と、その外周側を覆う絶縁体からなる外部被覆層42とを有している。また、各芯線41は、7本の銅線等の導電金属線材を螺旋状に撚り束ねた素線43と、その外周側を覆う絶縁体からなる被覆層44とにより構成されている。すなわち、各芯線41は、それぞれ独立して信号伝達や電力供給を行うことができるように構成されており、一本のケーブル4によって、多数の信号伝達や電力供給を行えるように構成されている。
なお、ケーブル4を構成している芯線41、芯線41を構成している素線43においても、それぞれ、信号送信や電力供給のためのケーブルとみなすことができる。
【0029】
[2.曲率分布生成方法]
以下、上記構成のケーブル4の曲率分布の生成方法について、図4のフローチャートに基づいて説明する。
[2.1 ケーブルの3次元情報取得]
まず、上記構成のケーブル4を、治具等によって、実機に配索された状態を再現するように屈曲変形させて固定し、それをX線CTスキャナ装置1で撮影する。これにより、ケーブル4の断面内部画像(ケーブル4の3次元情報)を取得する(ステップS1)。
図3(b)にケーブル4の断面内部画像の一例を示す。図3(b)中の断面内部画像gは、図3(a)のように、X線CTスキャナ装置1による撮影面Aをケーブル4と交差させ断面内部を透過撮影したものである。これらの断面内部画像gは、コンピュータに読み込み可能な画像データとして取得される。
【0030】
また、図3(b)の断面内部画像gは、周囲よりも濃く(暗く)現れる図中破線で示した濃部g1と、濃部g1よりも薄い(明るい)淡部g2とで現される濃淡画像として得られるものであり、本実施形態の場合、ケーブル4において7本の素線43が撚り束ねられた芯線41の断面像が7箇所の濃部g1として現れている。断面内部画像gは、X線の吸収率の差によって、導電金属線材からなる素線43と、被覆層42,44を含むその他の部分と、の間で大きくコントラストが生じるものであり、素線43の部分を濃部として表した場合、その他の部分は淡部として現れ、図3(b)のように芯線41の断面内部を濃部g1として認識することができる。
【0031】
なお、一般にX線画像は、X線吸収率の高い部分が明るく現れ、吸収率の低い部分が暗く現れるため、ケーブル4の撮影像は、金属である素線43が存在する部分が明るい淡部、他の部分が暗い濃部となって得られるのであるが、本実施形態の断面内部画像gでは、淡部と濃部とを反転させることで、素線43(芯線41)の断面像が濃部、他の部分が淡部となるように示し、素線43の断面像をより明瞭に把握できるようにしている。
【0032】
なお、複数の断面内部画像gが並ぶ方向(ケーブルの長手方向にほぼ対応する)を、Z軸方向とし、Z軸方向に直交する一の方向をX軸方向とし、Z軸方向及びX軸方向に直交する方向をY軸方向とする。また、以下では、このXYZ3次元座標を、全体座標という。
【0033】
X線CTスキャナ装置1は、Z方向において所定の幅寸法に設定された測定範囲内を所定のピッチ間隔(一定の間隔)Lで、撮影する。これにより、ケーブル4のZ方向における複数の断面内部画像gが得られる。図3(b)は、Z方向に連続して撮影された複数の断面内部画像gを模式的に示しており、図中各矢印は、X,Y,Z方向を示している。断面内部画像gは、X−Y平面に対して平行であるとともに、Z方向に沿って一定のピッチ間隔Lで連続的に複数枚撮影される。
ここで、ケーブル4の長手方向と、全体座標におけるZ方向と、は、できるだけ一致しているのが好ましいが、ケーブル4は、屈曲変形しているので、両者は必ずしも一致していない。
なお、ケーブル4の3次元情報は、CTスキャナ装置4によって断面画像として取得するほか、3次元読み取り装置等によってケーブルの複数の点の座標値を読み取っても良い。
【0034】
上記ステップS1にて取得された複数の断面内部画像gは、X線CTスキャナ装置1からコンピュータ2に送信される。そして、コンピュータ2は、送信された複数の断面内部画像gを通信部24により受信する。
その後、コンピュータ2のCPU21は、曲率分布生成プログラム26に基づいて、以下の処理(ステップS2〜S7)を実行する。
【0035】
[2.2 ケーブル中心位置検出]
まず、取得部31の中心位置検出部31aは、複数の断面内部画像gそれぞれについて、ケーブル4の中心位置を検出する(ステップS2)。中心位置検出部31aとして機能するCPU21は、コンピュータ2の記憶部25に格納した複数の断面内部画像gそれぞれについて、画像処理等によって濃淡画像から2値化画像に変換させる。そして、画像g中、ケーブル4の部分を示す濃部g1の輪郭を示す境界線g3の2次元データを取得する。
【0036】
次に、CPU21は、ケーブル4の断面形状である境界線g3の2次元データから、ケーブル中心位置g4を特定する。中心位置は、例えば、境界線g3の2次元データから、当該境界線g3で囲まれた領域の面積中心を求めることで、特定することができる。
本実施形態において、ケーブル中心位置g4は、各画像gにおけるケーブル4の位置を示す基準位置となる。なお、各画像gにおけるケーブル4の位置は、ケーブル4の他の位置を基準として定めても良い。
【0037】
ここで、複数の断面内部画像gは、X−Y平面に平行かつZ方向に沿ってピッチ間隔Lで連続的に撮影されているため、各断面内部画像gに対してはそれぞれZ方向における座標値を割り当てることができる。従って、CPU21は、上記各断面内部画像g上の点である断面中心g4のX−Y座標値に、それぞれ対応するZ座標値を割り当て、断面中心g4におけるX−Y−Zの3方向の3次元座標値を取得できる。
つまり、CPU21は、画像gに対応するケーブル4の長手方向における複数の点iについて、全体座標における3次元座標値(位置情報)を取得できる。複数の点iについて、全体座標における3次元座標値(位置情報)は、記憶部25に格納される。
なお、複数の断面内部画像gのZ方向におけるそれぞれの間隔を予め把握しておけば、複数の断面内部画像gのZ方向の間隔を一定のピッチ間隔とせずとも、各断面中心g4のX−Y座標値に対応するZ座標値を特定することができる。
【0038】
上記のように得られたケーブル中心位置g4の座標値には、画像gにおける中心位置検出の際の検出誤差がノイズとして含まれることがある。
【0039】
[2.3 全体座標から局所座標への変換]
続いて、取得部31の局所座標変換部31bは、複数の中心位置g4(点i)それぞれの座標値(全体座標での座標値)を、以下に説明する局所座標の座標値(位置情報)に変換する(ステップS3)。
局所座標は、u軸、v軸、w軸を有する3次元直交座標であり、点iを局所座標原点とする局所座標の各軸を、ui軸,vi軸、wi軸と表すこととする。なお、以下では、ui,vi、wiは、局所座標の軸を表すだけでなく、各軸方向の単位ベクトルを表す場合がある。
【0040】
図5(a)に示すように、任意の点iの局所座標のwi軸は、点iに隣接する点(一つ手前の点)i−1から、点iに向かう方向に一致するように設定される。すなわち、全体座標からみると、各点iを原点とする局所座標におけるwi軸は、それぞれ、ケーブルの屈曲により、異なる方向を向き得る。
【0041】
各局所座標のui軸及びvi軸は、各局所座標におけるwi軸に直交する平面内に設定される。
各局所座標のui軸は、iの変化によっては大きく変化しないか、又は、点iの位置の変化に応じて連続的に変化し、かつ、wi軸と直交するベクトルの方向に設定される。各局所座標のvi軸は、ui,wi軸と直交するベクトルの方向に設定される。
ui軸及びvi軸を設定するには、例えば、図5(b)に示すように、曲率の算出対象となっている全ての点iのwi軸に対して、平行とならない固定の単位ベクトルu0を予め規定しておく。そして、vi=wi×u0のベクトル演算、及び、ui=vi×wiのベクトル演算により、ui軸及びvi軸の方向を持つ単位ベクトルを算出すればよい。なお、上記ベクトル演算式において「×」は、外積を求めるためのベクトル演算記号である。
【0042】
また、ui軸及びvi軸を設定するには、例えば、図5(c)に示すように、ケーブル4の中心位置g4(位置i)からみた特定位置、例えば、特定の素線43の中心位置g5への単位ベクトルをu0(i)として規定しておく。そして、上記と同様に、vi=wi×u0(i)のベクトル演算、及び、ui=vi×wiのベクトル演算により、ui軸及びvi軸の方向を持つ単位ベクトルを算出すればよい。
【0043】
各点iの局所座標の設定の仕方は、上記のものに限られないが、事後的に局所座標値を全体座標値に変換したり、局所座標でのケーブル形状状態を評価したりできるように、所定のルールに基づいて、一意に決定されるものであればよい。なお、例示した局所座標の設定の仕方によれば、ui軸及びvi軸は、wi軸の方向の連続的な変化に応じて、その方向が連続的に変化するため、点iの位置の変位や曲率を算出するのに適切であるとともに、後述の平滑化にも適切なものとなっている。
【0044】
局所座標変換部31bとして機能するCPU21は、記憶部25に格納されている全体座標での点iの位置情報(座標値)を、下記式に基づく演算により、上記のように設定される局所座標における座標値に変換する。複数(4以上)の点iの局所座標における座標値(位置情報)は、記憶部25に格納される。
【数1】
ここで、Aは、任意の点iについての全体座標における座標値(ベクトル値)であり、Bは、局所座標における座標値(ベクトル値)であり、oは、前記局所座標の原点の全体座標における座標値(ベクトル値)であり、eu,ev,ewは、前記局所座標軸u,v,wの単位ベクトルである。A,B,o,eu,ev,ewは、それそれ、次のように定義される(図6参照)。
【数2】
【数3】
【0045】
本実施形態では、点i+1の座標値を示す局所座標の原点は、点iが採用される。したがって、局所座標における点i+1の座標値Bは、隣接する点(一つ手前の点)iからみた、点i+1の変位量を示すことになる。より具体的は、座標値Bは、隣接する点iからみた、ui軸方向の変位と、vi軸方向の変位と、を示しており、これらの変位は、点i+1におけるケーブル4の曲げ度合いを示す情報となっている。また、当然ながら、座標値Bは、wi軸方向の変位も示している。
なお、点i+1の座標値を示す局所座標の原点は、点iに限定されるものではなく、点i+1近傍の他の点であってもよい。
【0046】
本実施形態では、点i+1の座標値を示す局所座標のwi軸の方向は、点i−1から点iに向かう方向としたが、点i−1から点i+1に向かう方向、又は、点iから点i+1に向かう方向などとしても良い。つまり、点i+1の座標値を示す局所座標のw軸の方向は、点i+1又はその付近のケーブル4の長手方向にほぼ沿っていればよい。
【0047】
[2.4 位置データの平滑化]
第1平滑化処理部33は、各点iの局所座標値の平滑化を行うことで、前記ノイズ(検出誤差)の除去/抑制を行う(ステップS4)。まず、第1平滑化処理部33として機能するCPU21は、記憶部25に格納されている複数の点iの局所座標での座標値(位置情報)を用いて、ui軸方向、vi軸方向ごとの変位データを生成する。
ui軸方向の変位データは、ケーブル4上での長手方向位置を示す指標値Li(ケーブル端部からの距離など)が示す位置(点i)におけるケーブル4のui軸方向変位(隣接する点i−1からの変位)を示すものである。つまり、ui軸方向の変位データは、複数の点iの局所座標値におけるui軸の値の集合から構成される。
vi軸方向の変位データは、前記指標値Liが示す位置(点i)におけるケーブル4のvi軸方向変位(隣接する点i−1からの変位)を示すものである。つまり、vi軸方向の変位データは、複数の点iの局所座標値におけるvi軸の値の集合から構成される。
【0048】
CPU21は、これらのui軸方向、vi軸方向ごとの変位データそれぞれに対して、平滑化処理(第1の平滑化処理)を行う。第1の平滑化処理により、中心位置の検出誤差により生じた変位データそれぞれの脈動を抑制する。平滑化処理は、検出誤差が、ほぼサンプリング周波数で発生するという特徴を用いて行う。
【0049】
第1の平滑化処理は、例えば、変位データを、その変位データの脈動に追従しない関数(1回微分して0にならない関数)で近似し、その近似関数を平滑化された変位データとすることで行われる。
近似関数を多項式とする場合、点iの数Nに対して、N/2次以下の多項式とするのが好ましい。図7は、方向ごとの変位データ(N−1次関数)を、N/2次関数で近似した様子を示している。図7から明らかなように、N/2次関数で近似することで、変位データは、脈動が少なくなっている。
【0050】
近似関数を三角関数(sin関数,cos関数)とする場合は、基底関数を、sin(αL),cos(αL)として、α≦π(N−1)/Lm(ここで、Lmは、Liの最大値)とする)とするのが好ましい。図8は、方向ごとの変位データ(基底関数におけるα=πN/Lm)を、基底関数におけるα=π(N−1)/Lmとした近似関数で近似した様子を示している。図8においても、変位データの脈動が少なくなっている。
【0051】
なお、第1の平滑化処理は、近似関数による近似のほか、ローパスフィルタによって脈動を抑制/除去することによっておこなってもよい。
【0052】
また、図8に示すように、複数の点iが属するケーブル範囲(曲率分布生成の対象となっているケーブルの長手方向範囲;Li=0〜Lm)を、複数の区間P1,P2に分割しておき、複数に分割した区間毎に、上述のような平滑化処理を行っても良い。ケーブル4の大部分が直線状で、ケーブル端部だけが部分的に屈曲しているような場合のように、単一の近似関数で近似するのが困難な場合もある。このような場合であっても、第1平滑化処理部33では、複数の区間への分割と、区間毎に異なる近似関数の適用と、を行うことで、適切な平滑化を行うことができる。なお、複数区間への分割は、システムユーザからの分割ポイントの指定を受けて行っても良いし、よい近似が得られない場合に、第1平滑化処理部33が自動的に行ってもよい。
【0053】
なお、複数の区間P1,P2それぞれの近似関数は、曲率の連続性を保持するため、区間P1,P2の境界において1次微分値がほぼ等しくなるものを用いるのが好ましい。
【0054】
変位データには、検出誤差等により生じた位置変動誤差が含まれているが、上記のような平滑化処理を行うことで、変位データから算出される曲率の誤差を抑制できる。
平滑化処理された変位データは、記憶部25に格納される。
【0055】
[2.5 曲げ方向成分別の曲率算出]
[2.5.1 第1の曲率算出方法(外接円近似)]
曲率分布生成部32の曲率算出部32aは、記憶部25に格納された平滑化処理後の変位データから、各方向ui,viごとの曲率分布を生成する(ステップS5)。
曲率算出部32aとして機能するCPU21は、まず、平滑化処理されたui軸方向、vi軸方向ごとの変位データ(位置情報)を、全体座標における各点iごとの座標値(位置情報)に戻す。そして、CPU21は、複数の点iの中の任意の点iの曲率を求める場合、その点iの両隣の点i−1,i+1の座標を、それぞれ、その点iを原点とする局所座標の座標値に変換する。
【0056】
さらに、CPU21は、点i−1,i+1の局所座標値から、外接円の式に基づき、点iの曲率を算出する。曲率の算出は、局所座標のvi−wi面に投影した曲率Ku,ui−wi面に投影した曲率Kvそれぞれついて別々に行われる。つまり、複数の方向成分ごとの曲率Ku,Kvが算出される。なお、vi−wi面に投影した曲率Kuについては、各点についてのui軸の座標値を0として演算すればよい。
点iにおける曲率Ku,Kvの算出は、例えば、外接円の式を用いて行うことができる。
外接円の式による曲率の算出には、図10に示すように、点i−1をA、点iをO,点i+1をBとし、ベクトルOA,OBを算出する。そして、OA,OBの角度を算出する。OA,OBの角度θは、cosθ=OA・OB/((|OA|)|OB|)により求めることが可能である。
この角度θを用いて、外接円の式(R=|AB|/sinθ)により、曲率半径Rを算出できる。そして、この曲率半径Rより、曲率K=1/Rを求めることができる。
【0057】
[2.5.2 第2の曲率算出方法(ケーブル軸(w軸)からの変化量2次微分換算)]
各軸ui,viまわりの曲率Ku,Kvは、次の式によって求めることもできる。
【数4】
【0058】
上記式によって曲率Ku,Kvを求めるには、まず、第1の平滑化処理後の変位データを用いて、点iと点i+1間のZ微分値を、次のように求める。
【数5】
【0059】
点i−1,点iにおける微分値は、先の定義上、
【数6】
である。
したがって、点i−1から点i間の距離をsiとし、点iから点i+1間の距離をsi+1とすると、数値解析手法における差分法に基づき、曲率Ku,Kv≒2次微分値は、下記にように算出できる(図11参照)。
【数7】
【0060】
上記のようにして各点iについて算出された曲率Kuからなる曲率分布(第1の方向成分別別曲率分布)と、各点iについて算出された曲率Kvからなる曲率分布(第2の方向成分別曲率分布)は、記憶部25に格納される。
なお、上記演算方法は、一例であり、局所座標の定義の仕方に応じて演算方法を適宜変更すればよい。例えば、ケーブル長手方向(w軸方向)を、点i−1から点i+1に向かう方向、又は、点iから点i+1に向かう方向とした場合、それに応じて演算方法を変更すればよい。
また、形状に与えられた微分方程式を解くことができる数値解析手法として、上記では、差分法を採用したが、有限要素法などの他の数値解析手法を用いて、軸からの位置変動の2次微分(曲率成分)を求めることもできる。
【0061】
[2.6 曲率分布の平滑化]
第2平滑化処理部34は、曲率分布の平滑化を行うことで、曲率分布に含まれるノイズの除去/抑制を行う(ステップS6)。第2平滑化処理部34による平滑化処理は、平滑化の対象が異なるだけで、第1平滑化処理部34による平滑化処理と同様の処理である。
【0062】
つまり、第2平滑化処理部33として機能するCPU21は、第1及び第2の方向成分別曲率分布それぞれに対して、ui軸方向、vi軸方向ごとの変位データに対して行った第1の平滑化処理と同様の平滑化処理(第2の平滑化処理)を行う。
なお、第2の平滑化処理においても、複数区間P1,P2に分割した上での平滑化処理が可能である。
平滑化処理された第1及び第2の方向成分別曲率分布は、記憶部25に格納される。
【0063】
[2.7 曲率分布出力]
曲率分布生成部32の絶対曲率算出部32は、平滑化処理された第1及び第2の方向成分別曲率分布から、絶対曲率分布を求める。そして、曲率分布生成部32は、平滑化処理された第1・第2の方向成分別曲率分布、及び/又は、絶対曲率分布を出力する(ステップS7)。
【0064】
絶対曲率分布は、第1及び第2の方向成分別曲率分布のように、曲げ方向成分毎の曲率分布ではなく、方向とは無関係に、各点iにおけるケーブル曲率の分布を示すものである。
絶対曲率算出部32は、各点iにおける絶対曲率Kiを、Ki=Kui2+Kvi2によって算出する。
【0065】
なお、システムは、曲率分布のほか、変位データを出力してもよい。変位データは、局所座標によるものであってもよいが、ケーブル形状の評価をする上で、全体座標が好ましい場合には、下記式に基づいて、局所座標値Bを全体座標値Aに変換して出力すればよい。
【数8】
【0066】
[3.考察]
以上のような本実施形態に係る曲率分布生成システムによれば、検出誤差を含む変位データから、そのまま曲率を算出した場合の曲率のばらつきを抑えることができる。つまり、図12に示すように、変位データの脈動は、隣接する点間で曲率を大きく変動させ、曲率分布の精度を低下させる。したがって、検出誤差が大きい場合には、変位データを平滑化することで、曲率のばらつきを抑えることができる。
また、変位データに脈動が含まれたまま曲率を求めると、図13において「平滑化なし」のデータとして示すように、各方向成分の曲率として、極めて大きな正・負の曲率が交互に発生する。このような曲率分布から絶対曲率を求めると、図14において「平滑化なし」のデータとして示すように、絶対曲率に、極めて大きなノイズが発生する。
【0067】
これに対して、方向成分ごとに分離した変位データ又は曲率分布に対して、平滑化処理を行うと、図13において、「第1の平滑化のみ」及び「第2の平滑化のみ」のデータとして示すように、「平滑化なし」のデータに比べて、ノイズの少ない曲率分布が得られる。
また、図14において「平滑化データ」のデータとして示すように、第1又は第2の平滑化処理を行うと、「平滑化なし」のデータに比べて、ノイズを抑制した絶対曲率分布が得られる。
【0068】
図14において、「絶対曲率算出後平滑化」で示されるデータは、平滑化せずに絶対曲率分布を求めた後に、平滑化した場合のデータである。この場合、「平滑化なし」のデータにおけるノイズを平均化したノイズが残っており、「平滑化なし」よりはノイズが抑制されているものの、第1の平滑化処理又は第2の平滑化処理を行った場合よりも、ノイズ抑制効果が低下した。
したがって、第1の平滑化処理又は第2の平滑化処理のように、複数の方向成分ごとのデータ(変位データ又は曲率分布)に対して平滑化処理を行ったほうが、ノイズ抑制効果が高いことがわかる。
【0069】
本実施形態では、第1の平滑化処理と第2の平滑化処理の双方を実行しているが、いずれか一方だけであってもよい。いずれか一方の平滑化処理を実行する場合、より次数が低い曲率分布の平滑化(第2の平滑化処理)の方を実行するのが好ましい。特に、変位データにおける検出誤差が比較的小さければ、第2の平滑化処理だけでも十分である。
【0070】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0071】
2 コンピュータ
26 曲率分布生成コンピュータプログラム
31 取得部
31a 中心位置検出部
31b 局所座標変換部
32 曲率分布生成部
32a 曲率算出部
32b 絶対曲率算出部
33 第1平滑化処理部
34 第2平滑化処理部
g4 ケーブル中心位置(点)
【特許請求の範囲】
【請求項1】
ケーブルの曲率分布を生成するシステムであって、
ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部と、
前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部と、
前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部と、
を備えているケーブル曲率分布生成システム。
【請求項2】
前記平滑化処理部は、複数のケーブル曲げ方向ごとに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う
請求項1記載のケーブル曲率分布生成システム。
【請求項3】
前記曲率分布生成部は、複数のケーブル曲げ方向ごとの曲率分布を示す複数の方向成分別曲率分布を生成する
請求項1又は2記載のケーブル曲率分布生成システム。
【請求項4】
前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行う
請求項3記載のケーブル曲率分布生成システム。
【請求項5】
前記複数の点の前記位置情報は、それぞれ、局所座標における座標値として示され、
前記複数の点に対応する複数の前記局所座標は、それぞれ、各位置情報が示す点又はその近傍におけるケーブル長手方向が第1の座標軸方向として設定され、他の第2及び第3の座標軸方向が、前記第1の座標軸方向に直交する平面内に設定された3次元座標であり
前記曲率分布生成部は、複数のケーブル曲げ方向ごとの方向成分別曲率分布を生成する
請求項1〜4のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項6】
前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表されたものであり、
前記平滑化処理部は、前記局所座標における前記第2座標軸方向及び第3座標軸方向ごとに、前記変位の平滑化処理を行う
請求項5記載のケーブル曲率分布生成システム。
【請求項7】
前記曲率分布生成部は、複数の点それぞれの曲率を、局所座標における座標値の2次微分値として算出する
請求項5又は6記載のケーブル曲率分布生成システム。
【請求項8】
前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表され、
前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行う
請求項5〜7のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項9】
前記曲率分布生成部は、平滑化処理がなされた複数の方向成分別別曲率分布に基づいて、絶対曲率分布を生成する
請求項5〜8のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項10】
前記平滑化処理部は、曲率分布生成の対象となっているケーブルの長手方向範囲を複数に分割した区間毎に、平滑化処理を行う
請求項1〜9のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項11】
コンピュータを、請求項1記載のケーブル曲率分布生成システムとして機能させるためのコンピュータプログラム。
【請求項12】
ケーブルの曲率分布をコンピュータにより生成する方法であって、
ケーブルの長手方向における複数の点それぞれの位置情報をコンピュータが取得するステップと、
前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を前記コンピュータが生成するステップと、
前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を前記コンピュータが行うステップと、
を含む方法。
【請求項1】
ケーブルの曲率分布を生成するシステムであって、
ケーブルの長手方向における複数の点それぞれの位置情報を取得する取得部と、
前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を生成する曲率分布生成部と、
前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う平滑化処理部と、
を備えているケーブル曲率分布生成システム。
【請求項2】
前記平滑化処理部は、複数のケーブル曲げ方向ごとに、前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を行う
請求項1記載のケーブル曲率分布生成システム。
【請求項3】
前記曲率分布生成部は、複数のケーブル曲げ方向ごとの曲率分布を示す複数の方向成分別曲率分布を生成する
請求項1又は2記載のケーブル曲率分布生成システム。
【請求項4】
前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行う
請求項3記載のケーブル曲率分布生成システム。
【請求項5】
前記複数の点の前記位置情報は、それぞれ、局所座標における座標値として示され、
前記複数の点に対応する複数の前記局所座標は、それぞれ、各位置情報が示す点又はその近傍におけるケーブル長手方向が第1の座標軸方向として設定され、他の第2及び第3の座標軸方向が、前記第1の座標軸方向に直交する平面内に設定された3次元座標であり
前記曲率分布生成部は、複数のケーブル曲げ方向ごとの方向成分別曲率分布を生成する
請求項1〜4のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項6】
前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表されたものであり、
前記平滑化処理部は、前記局所座標における前記第2座標軸方向及び第3座標軸方向ごとに、前記変位の平滑化処理を行う
請求項5記載のケーブル曲率分布生成システム。
【請求項7】
前記曲率分布生成部は、複数の点それぞれの曲率を、局所座標における座標値の2次微分値として算出する
請求項5又は6記載のケーブル曲率分布生成システム。
【請求項8】
前記位置情報は、前記複数の点における各点の隣接する点からの変位が、前記局所座標を用いて表され、
前記平滑化処理部は、前記複数の方向成分曲率分布それぞれについて平滑化処理を行う
請求項5〜7のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項9】
前記曲率分布生成部は、平滑化処理がなされた複数の方向成分別別曲率分布に基づいて、絶対曲率分布を生成する
請求項5〜8のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項10】
前記平滑化処理部は、曲率分布生成の対象となっているケーブルの長手方向範囲を複数に分割した区間毎に、平滑化処理を行う
請求項1〜9のいずれか1項に記載のケーブル曲率分布生成システム。
【請求項11】
コンピュータを、請求項1記載のケーブル曲率分布生成システムとして機能させるためのコンピュータプログラム。
【請求項12】
ケーブルの曲率分布をコンピュータにより生成する方法であって、
ケーブルの長手方向における複数の点それぞれの位置情報をコンピュータが取得するステップと、
前記複数の点の前記位置情報に基づいて前記複数の点の曲率を算出することで、前記ケーブルの長手方向における曲率分布を前記コンピュータが生成するステップと、
前記曲率分布、及び/又は、前記複数の点の前記位置情報の平滑化処理を前記コンピュータが行うステップと、
を含む方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−122906(P2012−122906A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−275038(P2010−275038)
【出願日】平成22年12月9日(2010.12.9)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月9日(2010.12.9)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]