
ゲーム装置、ゲーム装置の制御方法、及びプログラム
【課題】複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させる。
【解決手段】ゲーム装置(10)の制限対象部位設定部(82)は、ゲームキャラクタ(44)に含まれる複数の部位のうちの一又は複数を制限対象部位に設定する。移動制限部(78)は、制限対象部位に設定されている一又は複数の部位をゲームキャラクタ(44)の本体部とは分離してゲーム空間(40)内に配置し、かつ、制限対象部位に設定されている一又は複数の部位がユーザの操作に基づいて移動することを制限する。制限対象部位解除部(82)は、制限対象部位に設定されている部位と、ゲームキャラクタ(44)の本体部と、の位置関係が所定の位置関係である場合、当該部位をゲームキャラクタ(44)の本体部と結合させ、当該部位を制限対象部位から非制限対象部位に設定する。
【解決手段】ゲーム装置(10)の制限対象部位設定部(82)は、ゲームキャラクタ(44)に含まれる複数の部位のうちの一又は複数を制限対象部位に設定する。移動制限部(78)は、制限対象部位に設定されている一又は複数の部位をゲームキャラクタ(44)の本体部とは分離してゲーム空間(40)内に配置し、かつ、制限対象部位に設定されている一又は複数の部位がユーザの操作に基づいて移動することを制限する。制限対象部位解除部(82)は、制限対象部位に設定されている部位と、ゲームキャラクタ(44)の本体部と、の位置関係が所定の位置関係である場合、当該部位をゲームキャラクタ(44)の本体部と結合させ、当該部位を制限対象部位から非制限対象部位に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ゲーム装置、ゲーム装置の制御方法、及びプログラムに関する。
【背景技術】
【0002】
従来、複数の部位(例えば、ロボットのアーム等)を含むゲームキャラクタを用いたゲームが知られている。このようなゲームでは、例えば、ゲームキャラクタのある部位がダメージを受けた場合、その部位が失われるようになっている場合がある。
【0003】
上記のようなゲームとしては、例えば、株式会社コナミデジタルエンタテインメント製のシューティングゲーム「ツインビー」が知られている(非特許文献1)。このゲームにおいては、ユーザが操作するゲームキャラクタが、爆弾を投げるためのアーム(左アーム及び右アーム)を備えている。
【0004】
また、このゲームにおいては、例えば、左アームに敵の攻撃が当たると左アームが失われ、右アームに敵の攻撃が当たると右アームが失われるようになっている。そして、このゲームにおいては、右アーム及び左アームの両方を失ったゲームキャラクタが、ゲーム画面の上方から出現する救急車キャラクタに触れると、右アーム及び左アームの両方が一度に回復されるようになっている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「ツインビーPORTABLE解説書」株式会社コナミデジタルエンタテインメント、2007年1月25日、p.4−5
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のようなゲームでは、失われた部位の回復に関するゲーム性(興趣)を高めるために、例えば、ゲームキャラクタが複数の部位を失っている場合にそれら複数の部位を一度に回復させるのではなく、それら複数の部位を一つずつ回復させていくような態様を採用することが考えられる。そして、このような態様を採用する場合には、失われた複数の部位の回復順序をユーザが決定できるようにし、失われた部位の回復に関するユーザの操作性を向上させることが望ましい。
【0007】
本発明は上記課題に鑑みてなされたものであって、その目的は、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能なゲーム装置、ゲーム装置の制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係るゲーム装置は、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置であって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段と、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段と、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段と、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段と、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段と、を含むことを特徴とする。
【0009】
また、本発明に係るゲーム装置の制御方法は、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置の制御方法であって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定ステップと、前記判定ステップにおける判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定ステップと、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御ステップと、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限ステップと、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定ステップであって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定ステップと、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除ステップと、を含むことを特徴とする。
【0010】
本発明に係るプログラムは、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置としてコンピュータを機能させるためのプログラムであって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段、前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段、として前記コンピュータを機能させる。
【0011】
また、本発明に係る情報記憶媒体は、上記のプログラムを記録したコンピュータ読み取り可能な情報記憶媒体である。
【0012】
本発明によれば、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能になる。
【0013】
また、本発明の一態様では、前記ゲーム装置は、前記ゲーム空間に配置される敵キャラクタと、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係である場合に、前記ゲームを途中終了させる途中終了手段と、前記途中終了手段による前記ゲームの途中終了を制限する途中終了制限手段と、前記ゲームキャラクタの複数の部位のうちの複数が前記制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、前記途中終了制限手段による制限を解除する途中終了制限解除手段と、を更に含むことを特徴とする。
【0014】
また、本発明の一態様では、前記ゲームキャラクタの複数の部位には、それぞれの部位が果たすべき役割が与えられており、前記ゲーム装置は、前記ゲームキャラクタの複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位が前記非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、前記本体部に対応する方向に対して当該攻撃部位に攻撃をさせる通常攻撃実行手段と、一又は複数の前記攻撃部位が前記制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、前記ゲーム空間に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる分離攻撃実行手段と、を更に含むことを特徴とする。
【0015】
また、本発明の一態様では、前記ゲーム空間には、視点が設定され、前記ゲーム装置は、前記ゲーム空間を前記視点から見た様子を示すゲーム画面を表示させる表示制御手段と、前記ゲームキャラクタの複数の部位のうちで前記制限対象部位に設定された部位があり、当該部位が前記ゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面が前記ゲーム画面に表示されないように、前記視点及び前記結合すべき面の位置関係に基づいて、前記視点の位置及び/若しくは視線方向、並びに/又は、前記結合すべき面の位置及び/若しくは向きを制御する位置関係制御手段と、を更に含むことを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係るゲーム装置のハードウェア構成を示す。
【図2】ゲーム空間の一例を示す図である。
【図3】表示部に表示されるゲーム画面の一例を示す図である。
【図4】ロボットの部位を示す図である。
【図5】ロボットが右腕を失った場合のゲーム画面の一例である。
【図6】ゲーム装置で実現される機能のうち、本発明に関連する機能を示す機能ブロック図である。
【図7】ゲーム状況データに含まれるデータのうち、ロボットのヒットポイントパラメータデータを示す図である。
【図8】状態データのデータ格納例を示す図である。
【図9】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図10】実施形態2のゲーム装置において実現される機能ブロック図である。
【図11】途中終了条件データのデータ格納例を示す図である。
【図12】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図13】実施形態3のゲーム装置において実現される機能ブロック図である。
【図14】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図15】実施形態4におけるゲーム装置の機能ブロック図である。
【図16】仮想カメラと切断面との位置関係が制御される様子を説明する図である。
【図17】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【発明を実施するための形態】
【0017】
[1.実施形態]
以下、本発明の実施形態の一例について図面に基づき詳細に説明する。本発明の実施形態に係るゲーム装置は、例えば、家庭用ゲーム機(据置型ゲーム機)、携帯ゲーム機、携帯電話機、携帯情報端末(PDA)又はパーソナルコンピュータ等によって実現される。ここでは、実施形態に係るゲーム装置を家庭用ゲーム機によって実現する場合について説明する。
【0018】
[1−1.ゲーム装置のハードウェア構成]
図1は、本発明の実施形態に係るゲーム装置のハードウェア構成を示す。図1に示すゲーム装置10は、家庭用ゲーム機11、表示部32、音声出力部34、及び光ディスク36(情報記憶媒体)を含む。
【0019】
表示部32及び音声出力部34は、家庭用ゲーム機11に接続される。表示部32は、例えば、家庭用テレビ受像機又は液晶ディスプレイなどである。音声出力部34は、例えば、家庭用テレビ受像機に内蔵されたスピーカ又はヘッドホンなどである。
【0020】
家庭用ゲーム機11は、公知のコンピュータゲームシステムである。家庭用ゲーム機11は、バス12、制御部14、主記憶16、画像処理部18、入出力処理部20、音声処理部22、光ディスク再生部24、ハードディスク26、通信インタフェース28、及びコントローラ30を含む。
【0021】
制御部14は、一又は複数の制御部(例えば、CPU等)を含む。制御部14は、図示しないROMに格納されるオペレーティングシステムや、光ディスク36から読み出されるプログラムに基づいて、家庭用ゲーム機11の各部を制御する処理や情報処理を実行する。
【0022】
主記憶16は、例えば、RAMを含む。光ディスク36から読み出されたプログラム及びデータは、主記憶16に書き込まれる。主記憶16は、制御部14の作業用メモリとしても用いられる。バス12は、アドレス及びデータを家庭用ゲーム機11の各部でやり取りするためのものである。
【0023】
画像処理部18は、VRAMを含む。画像処理部18は、制御部14から供給される画像データに基づいてVRAM上にゲーム画面を描画する。VRAM上に描画されたゲーム画面は、ビデオ信号に変換されて所定のタイミングで表示部32に出力される。
【0024】
入出力処理部20は、制御部14が、音声処理部22、光ディスク再生部24、ハードディスク26、通信インタフェース28、及びコントローラ30にアクセスするためのインタフェースである。
【0025】
音声処理部22は、サウンドバッファを含む。音声処理部22は、光ディスク36からサウンドバッファに読み出された音声データを、音声出力部34から出力する。
【0026】
通信インタフェース28は、インターネットなどの通信ネットワークに、家庭用ゲーム機11を有線又は無線接続するためのインタフェースである。
【0027】
光ディスク再生部24は、光ディスク36に記録されたプログラムやデータを読み取る。本実施形態においては、プログラムやデータを家庭用ゲーム機11に供給するために、光ディスク36が用られる場合を説明するが、メモリカード等の他の情報記憶媒体が用いられて、プログラムやデータが家庭用ゲーム機11に対して供給されるようにしてもよい。他にも例えば、通信ネットワークを介して遠隔地からプログラムやデータが家庭用ゲーム機11に供給されるようにしてもよい。
【0028】
ハードディスク26は、一般的なハードディスク装置(補助記憶装置)である。なお、本実施形態において光ディスク36に記憶されるものとして説明するプログラムやデータは、ハードディスク26に記憶されていてもよい。
【0029】
コントローラ30は、ユーザがゲーム操作を行うための操作部である。家庭用ゲーム機11には、一又は複数のコントローラ30が、有線又は無線接続される。入出力処理部20は、一定周期毎(例えば1/60秒ごと)に、コントローラ30の各操作部材の状態をスキャンする。このスキャン結果を表す操作信号は、バス12を介して制御部14に供給される。制御部14は、この操作信号に基づいてユーザのゲーム操作を判定する。
【0030】
[1−2.ゲーム装置において実行されるゲーム]
ゲーム装置10は、光ディスク36から読み出したゲームプログラムを実行することによって、例えば、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行する。
【0031】
本実施形態においては、例えば、戦場化した市街地を模したゲーム空間を、ユーザの操作に供されるロボット(ゲームキャラクタ)が移動して、敵キャラクタと戦う三人称シューティング(Third Person Shooting)ゲームが実行される場合について説明する。三人称シューティングゲームが開始されると、例えば、ゲーム空間40が、主記憶16に構築される。
【0032】
図2は、ゲーム空間40の一例を示す図である。図2に示すゲーム空間40は、互いに直交する三つの座標軸(Xw軸、Yw軸、及びZw軸)が設定された仮想的な3次元空間になっている。図2に示すように、ゲーム空間40には、戦場を表すオブジェクトであるフィールド42が配置される。
【0033】
フィールド42上には、例えば、ユーザの操作対象となるゲームキャラクタであるロボット44と、ロボット44に攻撃を加える敵ゲームキャラクタである敵キャラクタ46,48と、障害物を表すオブジェクトである障害物50と、が配置される。各オブジェクトの位置は、例えば、ワールド座標系(Xw−Yw−Zw座標系)の3次元座標で特定される。
【0034】
また、ゲーム空間40には、仮想カメラ52(視点)が設定される。仮想カメラ52は、例えば、ロボット44の背後の所定位置に設定される。仮想カメラ52の視線方向は、例えば、ロボット44の移動方向(又は、体の向き)と一致する。
【0035】
仮想カメラ52の位置は、例えば、ロボット44の位置と所定距離となるような関係が保たれる。即ち、仮想カメラ52は、ロボット44と一定の位置関係を保つので、ロボット44がゲーム空間40内を移動した場合、仮想カメラ52もロボット44の移動に伴って移動する。
【0036】
表示部32には、例えば、ゲーム空間40を仮想カメラ52から見た様子を表すゲーム画面が表示される。このゲーム画面は、ゲーム空間40に配置された各オブジェクトの頂点座標が、所定の座標変換演算を用いてワールド座標系からスクリーン座標系に座標変換されることによって生成される。
【0037】
図3は、表示部32に表示されるゲーム画面60の一例である。図3に示すように、ゲーム画面60には、例えば、仮想カメラ52の視野内にあるオブジェクトが含まれる。即ち、ゲーム画面60には、例えば、ロボット44、敵キャラクタ46,48、障害物50が含まれる。また、ロボット44が敵キャラクタ46,48を攻撃する場合の照準を示すアイコン45a,45bが、ゲーム画面に含まれる。
【0038】
ユーザは、アイコン45a,45bを頼りに敵キャラクタ46,48を攻撃する。本実施形態においては、ロボット44が両手に銃を持っており、この2丁の銃で敵キャラクタ46,48を攻撃する場合を説明する。例えば、アイコン45aは、ロボット44が左手に持っている銃の照準を示す。また例えば、アイコン45bは、ロボット44が右手に持っている銃の照準を示す。
【0039】
ユーザは、ゲーム画面60に含まれるロボット44を操作してゲームをプレイする。例えば、ユーザがコントローラ30を介して操作した方向に、ロボット44が移動する。また例えば、コントローラ30の所定のボタンが押下された場合、ロボット44は、アイコン45a,45bに対応する方向に対して、銃を発射して敵キャラクタ46,48を攻撃する。
【0040】
ゲーム空間40に配置される敵キャラクタ46,48は、所定の行動アルゴリズムに従って自律的に行動する。例えば、敵キャラクタ46は、ロボット44に近づいて攻撃を仕掛けるように行動する。また例えば、敵キャラクタ48は、ロボット44の攻撃から逃げるように行動する。
【0041】
敵キャラクタ46,48がロボット44を攻撃をする場合、ロボット44が、敵キャラクタ46の攻撃を回避したり、障害物50に隠れて攻撃をやり過ごすように、ユーザは、操作を行う。また例えば、ユーザは、敵キャラクタ46,48に反撃をするように操作を行う。
【0042】
本実施形態においては、ロボット44の部位毎に、敵キャラクタ46,48の攻撃によりダメージを受けたか否かが判定される。例えば、ロボット44が敵キャラクタ46から攻撃を受けてロボット44のある部位にダメージが蓄積すると、ロボット44は、この部位を失うようになっている。
【0043】
図4は、ロボットの部位を示す図である。図4に示すように、例えば、ロボット44は、頭44a、胴体44b、右腕44c、左腕44d、右脚44e、及び左脚44fから構成される。以降、これらをまとめて単に「ロボット44の部位」ともいう。
【0044】
ロボット44の複数の部位には、それぞれの部位が果たすべき役割が与えられている。役割とは、ロボット44の各部位がゲームにおいて果たすべき役割である。例えば、胴体44bは、ロボット44の各部位を互いにつなげるための役割が設定されている。
【0045】
また例えば、右腕44cと左腕44dは、敵キャラクタ46,48を攻撃する役割が設定されている。また例えば、右脚44eと左脚44fは、ロボット44を走らせたり歩かせたりする役割が設定されている。実施形態1においては、ロボット44が部位を失うと、原則として、この部位に対応する役割も失われることになる。
【0046】
例えば、ロボット44の右腕44cが敵キャラクタ46によって攻撃され、右腕44cに所定のダメージが蓄積した場合、右腕44cが、胴体44bから外れる。即ち、ロボット44は、敵キャラクタ46の攻撃によって右腕44cを失う。この場合、ロボット44は、右腕44cを使用して敵キャラクタ46,48を攻撃することができなくなる。
【0047】
図5は、ロボット44が右腕44cを失った場合のゲーム画面の一例である。右腕44cにダメージが蓄積すると、図5に示すように、右腕44cが失われる。この右腕44cは、フィールド42上に配置される。この状態で、ユーザの操作によってロボット44を移動させることはできるが、右腕44cは、ユーザの操作によって移動させることはできない。
【0048】
右腕44cは、例えば、敵キャラクタ46がロボット44を攻撃した際に、右腕44cが吹き飛ばされるように外れる。外れた右腕44cは、攻撃の際に敵キャラクタ46が腕を振りかざした方向に落ちる。
【0049】
図5に示す状態において、ロボット44は、右腕44cを用いて敵キャラクタ46,48に対して攻撃ができなくなるので、アイコン45bがゲーム画面から消去される。この状態においては、ロボット44は、左腕44dのみを使用して敵キャラクタ46,48に対して攻撃することになる。
【0050】
ロボット44が部位を失った場合、ユーザは、ロボット44が元の状態(図3の状態)に回復するために、失った部位を回収するように操作を行う。例えば、ロボット44が右腕44cを失った場合(図5の状態)、ユーザは、右腕44cが落ちている場所までロボット44を移動させることによって、右腕44cを回復させることができる。
【0051】
右腕44cが回復した場合、ロボット44は、再び右腕44cを使用して攻撃をすることが可能になる。この場合、ゲーム画面60は、図5に示す状態から図3に示す状態に戻る。即ち、右腕44cが、ロボット44(胴体44b)に再び結合し、アイコン45bが再び表示され、ロボット44は、再び右腕44cを使用して敵キャラクタ46,48を攻撃することができるようになる。
【0052】
本実施形態においては、ロボット44の部位のうちの何れかの部位がメイン部位として設定される。メイン部位とは、ロボット44の部位がすべて外れた場合に、ユーザの操作に供される部位のことである。即ち、ロボット44が敵キャラクタ46,48の攻撃を受け続けて部位が全て失われた場合、最終的には、ユーザの操作に供されるのは、メイン部位(例えば、頭44a)のみとなる。以降、ロボット44の部位のうち、このメイン部位を含む一又は複数の部位の集まりを本体部という。即ち、ユーザの操作対象となるものが本体部である。
【0053】
また、実施形態1においては、本体部がメイン部位のみになった場合に敵キャラクタ46,48の攻撃を本体部が受け続けても、ゲームが途中終了(ゲームオーバー)しないものとする。即ち、実施形態1においては、ロボット44が、敵キャラクタ46,48の攻撃を受けて、部位が全てバラバラになったとしても、ゲームオーバーにはならない場合を説明する。
【0054】
上記のように、本実施形態に係るゲーム装置10においては、ロボット44に含まれる複数の部位のうちの複数が、敵キャラクタ46からの攻撃によって失われる。したがって、ロボット44が複数の部位を失った場合、それぞれの部位を元に戻すために、フィールド42上に配置された複数の部位を一つずつ順番に回収することになる。
【0055】
ロボット44が、メイン部位である頭44a以外の部位を失うと、例えば、頭44aがフィールド42上を転がりながら、他の部位を回収することになる。この状態においては、ロボット44は、少なくとも右腕44c、左腕44dを回収しなければ、ロボット44は敵キャラクタ46,48を攻撃することができない。
【0056】
また例えば、ロボット44が右脚44e及び左脚44fを失うとロボット44が走ることができなくなる。したがって、ロボット44は、少なくとも右脚44e又は左脚44fの何れか一方を回収しなければ、ロボット44は走ることができないことになる。
【0057】
このように、ロボット44が複数の部位を失った場合、回収した部位によって、ロボット44の状態が異なる。本実施形態のゲーム装置10においては、ユーザの操作によって、失った部位を元に戻すことができるので、失った部位の回収順序をユーザに決定させることができ、ユーザの操作性を高めることができる。以降、この技術について、詳細に説明する。
【0058】
[1−3.ゲーム装置において実現される機能]
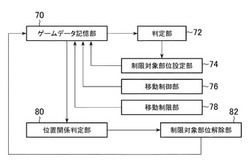
図6は、ゲーム装置10で実現される機能のうち、本発明に関連する機能を示す機能ブロック図である。図6に示すように、ゲーム装置10は、ゲームデータ記憶部70、判定部72、制限対象部位設定部74、移動制御部76、移動制限部78、位置関係判定部80、及び制限対象部位解除部82を含む。
【0059】
[1−3−1.ゲームデータ記憶部]
ゲームデータ記憶部70は、例えば、主記憶16及び光ディスク36等を主として実現される。ゲームデータ記憶部70は、例えば、三人称シューティングゲームを実現するために必要なデータを記憶する。
【0060】
[ゲーム状況データ]
例えば、三人称シューティングゲームの現在の状況を示すゲーム状況データが、ゲームデータ記憶部70に記憶される。例えば、下記に示すようなデータが、ゲーム状況データに含まれる。
(1)ゲーム空間40におけるロボット44の現在の状態(本体部の位置、姿勢、移動方向、及び移動速度等)を示すデータ
(2)ゲーム空間40における敵キャラクタ46,48の現在の状態(位置、移動方向、及び移動速度等)を示すデータ
(3)ロボット44の現在の生命力や耐久力等を示すヒットポイント(HP)パラメータデータ
(4)敵キャラクタ46,48の現在の生命力や耐久力等を示すヒットポイントパラメータデータ
(5)ロボット44、敵キャラクタ46,48の能力値(攻撃力、守備力等)を示すパラメータ
(6)仮想カメラ52の現在の状態(位置及び視線方向等)を示すデータ
【0061】
図7は、ゲーム状況データに含まれるデータのうち、ロボット44のヒットポイントパラメータデータを示す図である。図7に示すように、例えば、ロボット44の部位を識別する情報と、ダメージを受けると減少する数値情報であるヒットポイントパラメータと、ユーザ操作による移動が制限される部位である制限対象部位を識別するための情報である制限対象部位フラグと、制限対象部位となった部位が配置されている位置と、が対応づけられて格納される。
【0062】
例えば、敵キャラクタ46,48の攻撃によってロボット44の部位がダメージを受けた場合、ダメージを受けた部位に対応するヒットポイントパラメータの値が減少する。また例えば、本実施形態においては、メイン部位(例えば、頭44a)には、ヒットポイントパラメータは設定されないものとする。即ち、メイン部位は、ユーザ操作による移動が制限されないものとする。
【0063】
ヒットポイントパラメータの減少の程度は、例えば、敵キャラクタ46,48の能力値(例えば、攻撃力)とロボット44の能力値(例えば、守備力)との少なくとも一方に基づいて決定される。即ち例えば、所定の当たり判定によって敵キャラクタ46,48の攻撃によりダメージを受けた部位が特定され、この部位に対応するヒットポイントパラメータの値が、敵キャラクタ46,48の能力値及びロボット44の能力値に基づいた数値だけ減少することになる。
【0064】
本実施形態においては、例えば、ヒットポイントパラメータの初期値を100とする。ロボット44の部位のうち、例えば、ヒットポイントパラメータが10以下になった部位が制限対象部位として設定される。即ち、ロボット44は、ヒットポイントパラメータが10以下になった部位を失うことになる。図7に示すデータ格納例の状態においては、ロボット44は、右腕44cを失っていることになる。
【0065】
また例えば、ゲーム画面60に表示されるロボット44の状態は、ヒットポイントパラメータデータに基づいて変更される。つまり、ヒットポイントパラメータデータの制限対象部位フラグがオンになっている部位をロボット44が失っているように、ゲーム画面60におけるロボット44の表示形態が変更される。
【0066】
図7のデータ格納例の場合、ゲーム画面60には、図5のように、右腕44cを失ったロボット44が表示される。右腕44cが配置されている(落ちている)位置が、ヒットポイントパラメータデータに格納されることになる。なお、制限対象部位として設定されていない部位(即ち、制限対象部位フラグがオフになっている部位)の位置は、ゲーム状況データに格納されるロボット44の本体部の位置に基づいて特定される。
【0067】
また、本実施形態においては、ロボット44の判定対象部位がダメージを受ける毎に値が減少するヒットポイントパラメータが用いられる場合を説明するが、ロボット44の判定対象部位のダメージの程度は、他のパラメータによって表現されるようにしてもよい。即ち、ロボット44が受けたダメージの程度は、予め定められた方法によって判定されるようにすればよい。
【0068】
例えば、ロボット44の判定対象部位がダメージを受ける毎に増加されるダメージパラメータが用いられるようにしてもよい。この場合、ダメージパラメータには初期値(例えば、0)であり、ダメージパラメータが所定範囲(例えば、90以上)になった場合に、ロボット44の部位が失われることになる。この部位が回収されて本体部に結合した場合、ダメージパラメータは、初期値に戻る。
【0069】
[状態データ]
また例えば、ゲームデータ記憶部70は、ロボット44に設定されている制限対象部位の組み合わせと、ロボット44の状態(移動方法や表示形態等)と、を対応付けた状態データを記憶する。ゲーム装置10は、例えば、制限対象部位フラグがオンになっている部位と状態データとに基づいて、現在のロボット44の移動方法やゲーム画面60におけるロボットの表示形態を把握することができる。
【0070】
図8は、状態データのデータ格納例を示す図である。図8に示すように、例えば、制限対象部位として設定されている部位と、ロボット44の移動方法及び移動速度と、ロボット44の表示形態と、が対応付けられて状態データに格納される。
【0071】
例えば、ロボット44が、右脚44e又は左脚44fの何れか一方のみを失っている状態の場合、ロボット44は、片脚を失ったような表示形態となり、残っている片脚で飛び跳ねるように移動する。この場合の移動速度は、両脚がある場合よりも遅くなる。
【0072】
また例えば、ロボット44が右脚44e及び左脚44fの両方を失っているが、少なくとも右腕44c又は左腕44dの何れかを失っていない状態の場合、ロボット44は、フィールド42にうつ伏せになるような表示形態となり、腕を使ってほふく前進をするように移動する。この場合の移動速度は、片脚で飛び跳ねるように移動する場合よりも遅くなる。
【0073】
このように、本実施形態においては、例えば、ヒットポイントパラメータデータの制限対象部位フラグと、状態データと、に基づいてロボット44の移動動作の態様が制御される。ロボット44が失った部位を回収して制限対象部位フラグが更新された場合、状態データに基づいてロボット44の表示形態や移動方法等が変更されることになる。
【0074】
[1−3−2.判定部]
判定部72は、制御部14を主として実現される。判定部72は、ゲームキャラクタ(例えば、ロボット44)に含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する。
【0075】
判定対象部位とは、ロボット44の部位のうちでダメージを受けたか否かが判定される部位である。判定対象部位は、予め定められた部位であってよい。本実施形態においては、ロボット44の部位のうち、判定対象部位となるものは、頭44a以外の全ての部位(胴体44b、右腕44c、左腕44d、右脚44e、及び左脚44f)である。即ち例えば、ヒットポイントパラメータデータ(図7)において、ヒットポイントパラメータが設定されている部位が、判定対象部位となる。
【0076】
本実施形態においては、例えば、判定部72は、ゲーム空間40に配置された他のキャラクタ(敵キャラクタ46,48等)から判定対象部位が攻撃を受けたか否かを判定することによって、判定対象部位がダメージを受けたか否かを判定する場合について説明する。例えば、敵キャラクタ46,48とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0077】
他にも例えば、敵キャラクタ46,48が持っている武器とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。また例えば、敵キャラクタ46,48から発せられた攻撃媒体(例えば、弾、レーザー又は魔法等)とロボット44の判定対象部位との間の当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0078】
なお、判定部72が、判定対象部位がダメージを受けたか否かを判定する方法は、予め定められた方法であればよく、これに限られない。他にも例えば、判定部72は、ゲーム空間40に配置された所定の障害物(例えば、ロボット44に対して落ちてくる天井、高電流が流れた鉄線、又は爆弾等)とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定されるようにしてもよい。
【0079】
また例えば、判定部72は、ゲーム空間40に設定された所定領域(例えば、高電流が流れた領域や放射能に汚染された部屋等)内にロボット44の判定対象部位が含まれたか否かを判定する処理に基づいて、判定対象部位がダメージを受けたか否かが判定されるようにしてもよい。また例えば、判定部72は、ロボット44が所定の状態になった場合(例えば、ロボット44がフィールド42に設定された所定領域に侵入して毒に侵された状態になった場合)、所定時間が経過したか否かに基づいて、判定対象部位がダメージを受けたか否かを判定するようにしてもよい。
【0080】
本実施形態においては、例えば、判定対象部位がダメージを受けた場合、ヒットポイントパラメータデータに格納されたヒットポイントパラメータのうち、当該ダメージを受けた判定対象部位に対応する値が、ゲーム状況データ(例えば、能力値を示すパラメータ)に基づいて決定される程度だけ変更される場合について説明する。
【0081】
なお、ヒットポイントパラメータの変更の程度は、予め定められた方法に基づいて決定されればよく、上記の場合に限られない。他にも例えば、判定対象部位がダメージを受けた場合、ヒットポイントパラメータが予め定められた値だけ変更されるようにしてもよい。
【0082】
[1−3−3.制限対象部位設定部]
制限対象部位設定部74は、制御部14を主として実現される。制限対象部位設定部74は、判定部72の判定結果に基づいて、ゲームキャラクタ(ロボット44)に含まれる複数の部位のうちの一又は複数を制限対象部位に設定する。例えば、制限対象部位設定部74は、判定部72によってダメージを受けたと判定された判定対象部位に関するパラメータが所定の条件を満足した場合、この判定対象部位を制限対象部位に設定する。
【0083】
本実施形態においては、制限対象部位設定部74は、判定部72の判定結果に基づいて、判定対象部位のヒットポイントパラメータが所定範囲(例えば、10以下)になった場合、この判定対象部位を制限対象部位に設定する場合について説明する。
【0084】
また、制限対象部位設定部74が、制限対象部位フラグをオンにすることによって、ロボット44の部位を制限対象部位として設定する場合を説明するが、制限対象部位の設定方法は、これに限られない。制限対象部位の設定方法は、ロボット44の部位のうちで、ユーザ操作による移動を制限すべき部位を特定することができる方法であればよい。他にも例えば、制限対象部位を識別するためのテーブルをゲームデータ記憶部70に用意しておき、制限対象部位を識別する情報が格納されることによって、制限対象部位が設定されるようにしてもよい。
【0085】
[1−3−4.移動制御部]
移動制御部76は、制御部14を主として実現される。移動制御部76は、ゲームキャラクタ(例えば、ロボット44)に含まれる複数の部位のうちの、制限対象部位に設定されていない非制限対象部位を含んで構成されるゲームキャラクタの本体部をユーザの操作に基づいて移動させる。
【0086】
つまり、移動制御部76は、例えば、ロボット44の部位のうち制限対象部位に設定された部位以外の部位(非制限対象部位)からなる本体部をユーザの操作に基づいて移動させる。ユーザの操作は、本体部がゲーム空間40を移動すべき方向を指示するためのものであり、例えば、コントローラ30の所定のボタンが押下されることである。
【0087】
[1−3−5.移動制限部]
移動制限部78は、制御部14を主として実現される。移動制限部78は、制限対象部位に設定されている一又は複数の部位をゲームキャラクタ(例えば、ロボット44)の本体部とは分離してゲーム空間40内に配置し、かつ、制限対象部位に設定されている一又は複数の部位がユーザの操作に基づいて移動することを制限する。
【0088】
つまり、移動制限部78は、制限対象部位に設定されている一又は複数の部位をユーザの操作対象(即ち、本体部)から分離して固定位置に配置し、制限対象部位に設定されている一又は複数の部位をユーザの操作に基づいて移動させないようにする。
【0089】
なお、制限対象部位に設定されている部位が配置される位置は、その部位がダメージを受けた際のロボット44の位置に基づいて決定される。例えば、右腕が制限対象部位に設定された場合、右腕の配置位置は、右腕のヒットポイントパラメータが所定範囲(例えば、10以下)になった際(言い換えれば、右腕が制限対象部位に設定される際)のロボット44(右腕)の位置に基づいて決定される。
【0090】
また、制限対象部位に設定される部位が配置される位置と、ロボット44の本体部と、の位置関係は、例えば、当該部位がダメージを受けた際のロボット44の位置及び敵キャラクタ46,48の攻撃媒体の移動方向等に基づいて決定される。即ち例えば、敵キャラクタ46,48が発した弾の移動方向に対してロボット44の部位が飛ばされるようにして、フィールド42上に配置されることになる。
【0091】
本実施形態においては、制限対象部位フラグがオンになっていない非制限対象部位が、本体部としてユーザの操作に基づいて移動し、制限対象部位フラグがオンになっている制限対象部位がユーザの操作に基づいて移動することが制限される場合について説明する。
【0092】
即ち、移動制限部78は、ヒットポイントパラメータが所定範囲(例えば、10以下)になっている部位の制限対象部位フラグをオンにすることによって当該部位を制限対象部位とし、制限対象部位フラグがオンになっている部位については、ユーザの操作による移動をさせないように制限する。また、制限対象部位フラグがオンになっている部位をロボット44の本体部とは分離して固定位置に配置する。上記のように、この固定位置は、例えば、ロボット44の位置に基づいて決定される。この位置は、例えば、ヒットポイントパラメータデータに格納される。
【0093】
なお、制限対象部位として設定された部位は、例えば、フィールド42上に配置された位置からユーザの操作によって移動できないように、移動が制限されるようにすればよい。例えば、制限対象部位として設定された部位は、ユーザの操作による移動ではない動作、即ち例えば、予め定められた動作(分離された右腕44cが手を振る、右脚44eが本体部に近づいて来たり所定範囲内を動き回る等)をするようにしてもよい。
【0094】
また、ゲーム空間40に配置されている分離されたロボット44の制限対象部位は、所定の表示制御処理(例えば、青く光る等)が行われて、ユーザに、どこに制限対象部位が落ちているのかを案内するようにしてもよい。他にも例えば、本体部から分離して一定時間が経過した制限対象部位については、所定の位置関係を満たさなくても、自動的に本体部に結合するようにしてもよい。
【0095】
[1−3−6.位置関係判定部]
位置関係判定部80は、制御部14を主として実現される。位置関係判定部80は、制限対象部位に設定されている部位と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係であるか否かを判定する。特に、複数の部位が制限対象部位に設定されている場合、位置関係判定部80は、制限対象部位に設定されている複数の部位の各々について、当該部位と、ゲームキャラクタの本体部と、の位置関係が前記所定の位置関係であるか否かを判定する。
【0096】
本実施形態においては、位置関係判定部80は、ゲーム状況データを参照して、制限対象部位に設定されている部位が配置されている位置と、ゲームキャラクタの本体部が配置されている位置と、の距離が所定範囲(例えば、所定距離以下)となる位置関係であるか否かを判定する場合について説明する。
【0097】
なお、位置関係判定部80が判定する位置関係は、制限対象部位に設定されている部位の位置と、ゲームキャラクタの本体部の現在の位置と、に基づいて判定されるものであればよく、上記の例に限られない。他にも例えば、上記の距離が所定範囲になり、かつ、ロボット44の移動方向と、制限対象部位が配置されている位置及び本体部の位置を結ぶ方向と、の角度が所定範囲(例えば、所定角度以内)になった場合に、位置関係が所定の位置関係である、と判定されるようにしてもよい。
【0098】
[1−3−7.制限対象部位解除部]
制限対象部位解除部82は、制御部14を主として実現される。制限対象部位解除部82は、制限対象部位に設定されている部位と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係であると判定された場合、当該部位をゲームキャラクタの本体部と結合させ、当該部位を制限対象部位から非制限対象部位に設定する。即ち、制限対象部位解除部82は、所定の位置関係であると判定された制限対象部位に設定されている部位のユーザの操作による移動の制限を解除する。
【0099】
本実施形態においては、制限対象部位解除部82は、所定の位置関係であると判定された制限対象部位のヒットポイントパラメータを所定範囲外の値(例えば、10以上の値)に変更し、制限対象部位フラグをオフにすることによって、制限対象部位に設定された部位を非制限対象部位に戻す場合について説明する。例えば、制限対象部位解除部82は、ヒットポイントパラメータを初期値(例えば、100)にすることによって、制限対象部位に設定された部位を非制限対象部位に戻す。
【0100】
また、この非制限対象部位にさせた部位をゲームキャラクタの本体部と結合するように、ゲーム画面60の表示を更新する。この処理は、例えば、ヒットポイントパラメータデータの制限対象部位フラグと状態データ(図8)とが参照されて、ロボット44の表示形態が特定されることによって行われる。
【0101】
[1−4.ゲーム装置において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図9は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図9に示す処理を実行する。
【0102】
まず、制御部14(判定部72)は、判定対象部位がダメージを受けたか否かを判定する(S101)。S101における判定方法は、先述したように、予め定められた方法(例えば、ロボット44と敵キャラクタ46,48との当たり判定)に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0103】
判定対象部位がダメージを受けた場合(S101;Y)、制御部14は、ゲーム状況データのヒットポイントパラメータデータを更新する(S102)。即ち例えば、敵キャラクタ46,48の能力値と、ロボット44の能力値と、に基づいて、ダメージを受けた判定対象部位のヒットポイントパラメータの値を減少させることによって、ヒットポイントパラメータデータが更新される。
【0104】
制御部14は、更新されたヒットポイントパラメータデータを参照して、ヒットポイントパラメータが所定範囲(例えば、10以下)になった部位があるか否かを判定する(S103)。ヒットポイントパラメータが所定範囲になった部位がある場合(S103;Y)、制御部14(制限対象部位設定部74)は、ヒットポイントパラメータが所定範囲になった部位を制限対象部位として設定する(S104)。例えば、ヒットポイントパラメータが所定範囲になった部位の制限対象部位フラグをオンにすることによって、制限対象部位が設定される。
【0105】
制御部14は、制限対象部位を本体部から分離してゲーム空間40に配置する(S105)。例えば、敵キャラクタ46,48から攻撃を受けた方向に対して制限対象部位が吹き飛ばされるように、ゲーム画面60の表示処理が行われて、制限対象部位が分離される。制限対象部位が分離された場合のロボットの移動方法、移動速度、及び表示形態は、例えば、状態データ(図8)に基づいて決定される。
【0106】
また、S105において分離された制限対象部位が配置される位置は、例えば、ロボット44の位置及び敵キャラクタ46,48の攻撃媒体の移動方向(例えば、敵キャラクタ46,48が発した弾の進行方向)に基づいて決定される。例えば、ロボット44の判定対象部位がダメージを受けた際のロボット44の位置から、攻撃媒体の移動方向に対応する方向に対して所定距離だけ離れた位置に、制限対象部位が配置される。
【0107】
制限対象部位が配置される位置に関する情報は、ヒットポイントパラメータデータに格納される。S105において制限対象部位が分離されると、図5に示すように、制限対象部位がフィールド42上に配置される。
【0108】
制御部14(移動制御部76)は、制限対象部位に設定されている部位以外の部位、即ち、ロボット44の本体部をユーザの操作に基づいて移動させる(S106)。この場合、制限対象部位に設定されている部位に関しては、ユーザの操作に基づいて移動をさせないように制限されることになる。
【0109】
なお、制限対象部位に設定されている部位がない場合、ロボット44の本体部はロボット44の全部位を含んで構成されることになり、ロボット44の全部位がユーザの操作に基づいて移動することになる。
【0110】
また、ゲーム装置10においては、制限対象部位に設定されている部位の組み合わせによって、ロボット44の移動の仕方及び移動速度が異なるようになっている。例えば、本実施形態においては、制限対象部位に設定されている部位の組み合わせと図8に示す状態データとに基づいて特定される方法及び速度でロボット44が移動する。
【0111】
S101〜S106のようにして、制限対象部位が設定される。制限対象部位が設定された場合、ユーザは、敵キャラクタ46,48を攻撃しづらくなったり、ロボット44を移動させづらくなるので、コントローラ30を操作して本体部を移動させて、フィールド42上に配置された制限対象部位を回収することになる。
【0112】
即ち、制限対象部位が設定された場合、ユーザは、分離された制限対象部位を回復させるように、ゲーム操作を行うことになる。ロボット44の状態は、例えば、制限対象部位の組み合わせ(又は、本体部を構成する部位の組み合わせ)によって変わるので、制限対象部位の回復順によってロボット44の状態は異なる。したがって、ユーザは、自分の好きな順番で制限対象部位を回復するように操作を行うことになる。
【0113】
図9に戻り、制御部14は、ゲーム状況データの制限対象部位フラグを参照して、ロボット44の部位のうちで制限対象部位として設定されている部位があるか否かを判定する(S107)。
【0114】
制限対象部位が設定されている場合(S107;Y)、制御部14(位置関係判定部80)は、本体部と制限対象部位とが所定の位置関係であるか否かを判定する(S108)。S108においては、例えば、ゲーム状況データが参照され、ロボット44の位置と、制限対象部位が配置されている位置と、の位置関係が所定の条件を見たすか否かが判定される。
【0115】
本体部と制限対象部位とが所定の位置関係である場合(S108;Y)、制御部14(制限対象部位解除部82)は、この制限対象部位を本体部と結合させて非制限対象部位に設定(変更)する(S109)。
【0116】
S109においては、まず、所定の位置関係となった制限対象部位の制限対象部位フラグがオフにされる。次いで、この更新された制限対象部位フラグと状態データ(図8)とに基づいて、ロボット44の本体部と上記の制限対象部位とが結合するように、ロボット44の表示形態が更新される。
【0117】
また、制限対象部位フラグがオフにされた部位は、ユーザの操作による移動の制限が解除される。即ち、本体部と結合した部位は、ユーザの操作に基づいて移動するようになる。なお、S109において、制限対象部位が本体部と結合される場合、ロボット44が転がる等のアニメーション処理が施されるようにしてもよい。
【0118】
一方、判定対象部位がダメージを受けていない場合(S101;N)、ヒットポイントパラメータが所定範囲になった部位がない場合(S103;N)、処理は、S107に移行する。また、制限対象部位が設定されていない場合(S107;N)、本体部と制限対象部位とが所定の位置関係でない場合(S108;N)、処理は、S110に移行する。
【0119】
制御部14は、所定の終了条件を満たすか否かを判定する(S110)。終了条件は、予め定められた条件であればよい。実施形態1においては、敵キャラクタ46,48の攻撃等によってゲームが途中終了しないので、終了条件は、例えば、ユーザの操作によってゲームの終了の指示が入力されたか否か、又は、所定のゲームクリアの条件が満たされたか否か等であってよい。他にも例えば、ゲームが途中終了する条件が設定される場合には、この条件が満たされたか否かが判定されてもよい。
【0120】
終了条件を満たす場合(S110;Y)、処理は終了する。終了条件を満たさない場合(S110;N)、処理は、S101に戻る。即ち、制限対象部位になった部位があるか否か、又は、制限対象部位を非制限対象部位に戻すか否か、の処理が、再び行われることになる。
【0121】
以上説明したゲーム装置10は、ロボット44の本体部をユーザの操作に基づいて移動させ、ダメージを受けた部位を制限対象部位として設定する。制限対象部位は、本体部から分離されてユーザの操作による移動が制限される。また、ロボット44の本体部と、制限対象部位と、の位置関係が所定の条件を満たした場合に、制限対象部位の移動の制限が解除され、この部位が、再度ユーザの操作に供されるようになる。
【0122】
実施形態1のゲーム装置10によれば、制限対象部位の回復順をユーザが決定することができるので、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能になる。即ち例えば、制限対象部位の組み合わせによってロボット44の状態が異なるので、ユーザの好みに応じた順番で、制限対象部位を回復させることができる。
【0123】
なお、本発明は、以上説明した実施形態1に限定されるものではなく、本発明の趣旨を逸脱しない範囲で適宜変更可能である。以下、本発明に係る他の実施形態及び変形例について説明する。
【0124】
[2.実施形態2]
以下、実施形態2について説明する。実施形態1においては、ゲーム装置10は、ロボット44の判定対象部位がダメージを受けた場合、ロボット44の部位が制限対象部位となり、最終的には頭44a(メイン部位)のみがユーザの操作対象となる。そして、実施形態1においては、敵キャラクタ46,48の攻撃によってゲームが途中終了(ゲームオーバー)することなく、ゲームが続行される。
【0125】
実施形態2においては、制限対象部位が設定された場合に、ゲームが途中終了する条件が変更される点に特徴がある。例えば、制限対象部位が設定されていない場合には、ロボット44が敵キャラクタ48と接触しても、ゲームは途中終了しないが、ロボット44の本体部がメイン部位(例えば、頭44a)だけになった場合に、ロボット44が敵キャラクタ48に捕まるとゲームが途中終了する。
【0126】
なお、実施形態2におけるゲーム装置10のハードウェア構成は、実施形態1と同様(図1)であるので、説明を省略する。
【0127】
[2−1.実施形態2の機能ブロック図]
図10は、実施形態2のゲーム装置10において実現される機能ブロック図である。図10に示すように、実施形態2のゲーム装置10においては、実施形態1のゲーム装置10の機能に加えて、途中終了部84、途中終了制限部86、及び途中終了制限解除部88が実現される。
【0128】
[2−1−1.実施形態2のゲームデータ記憶部]
また、実施形態2のゲームデータ記憶部70は、例えば、実行中のゲームが途中終了するための条件を示す途中終了条件データを記憶する。
【0129】
図11は、途中終了条件データのデータ格納例を示す図である。図11に示すように、途中終了条件データには、例えば、制限対象部位として設定されている部位を識別する情報と、ゲームが途中終了するための途中終了条件と、が対応付けられて格納される。即ち、途中終了条件データによって、制限対象部位の組み合わせと、途中終了条件と、が関連付けられることになる。
【0130】
実施形態2においては、途中終了条件として、敵キャラクタ46,48の位置と、ロボット44の本体部の位置と、の位置関係に関する条件を例に挙げて説明する。位置関係に関する所定の条件は、例えば、ロボット44の本体部の位置と、ゲーム空間40に配置された敵キャラクタ46,48の位置と、によって定まる条件であればよい。例えば、この条件は、これらの距離が所定範囲であるか否か、であってよい。
【0131】
例えば、図11のデータ格納例では、例えば、ロボット44の本体部が頭44aだけになった場合、本体部の位置と、敵キャラクタ48の位置と、が所定の位置関係になった場合に、ゲームが途中終了する。
【0132】
なお、途中終了条件データに格納される途中終了条件は、敵キャラクタ46,48の位置と、ロボット44の本体部の位置と、の位置関係に関する条件であればよい。他にも例えば、敵キャラクタ46,48とロボット44の本体部とが接触するか否か、が途中終了条件となってもよい。
【0133】
[2−1−2.途中終了部]
途中終了部84は、制御部14を主として実現される。途中終了部84は、例えば、ゲーム空間40に配置される敵キャラクタ(例えば、敵キャラクタ46,48)と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係である場合に、ゲームを途中終了させる。
【0134】
実施形態2においては、途中終了部84が、途中終了条件データによって定まる途中終了条件をゲーム状況データが満たすか否かに基づいて、実行中のゲームを途中終了させる場合について説明する。即ち、途中終了部84は、途中終了条件データによって定義される途中終了条件に基づいて、ゲームを途中終了させるか否かを判定することになる。
【0135】
[2−1−3.途中終了制限部]
途中終了制限部86は、制御部14を主として実現される。途中終了制限部86は、例えば、途中終了部84によるゲームの途中終了を制限する。例えば、途中終了制限部86は、敵キャラクタ46,48とロボット44の本体部との位置関係が所定の条件を満たした場合であっても、途中終了部84にゲームを途中終了させないようにする。
【0136】
別の言い方をすれば、途中終了制限部86は、制限対象部位に設定されている部位の組み合わせが所定の組み合わせでない場合に、途中終了部84によるゲームの途中終了を制限する。本実施形態においては、途中終了条件データに格納されるデータのうちで、上記の所定の組み合わせに関連付けて敵キャラクタ46,48とロボット44の本体部との位置関係に関する途中終了条件が格納されることによって、途中終了部84によるゲームの途中終了が制限されることになる。
【0137】
[2−1−4.途中終了制限解除部]
途中終了制限解除部88は、制御部14を主として実現される。途中終了制限解除部88は、ゲームキャラクタ(例えば、ロボット44)の複数の部位のうちの複数が制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、途中終了制限部86による制限を解除する。
【0138】
本実施形態においては、途中終了制限解除部88は、ゲームキャラクタ(ロボット44)に含まれる複数の部位のうちのすべての判定対象部位が制限対象部位に設定されている場合に、途中終了制限部86による制限を解除する場合を説明する。つまり、例えば、頭44a以外のすべての判定対象部位が制限対象部位に設定されている場合に、途中終了制限部86による制限が解除され、敵キャラクタ46,48とロボット44とが所定の位置関係になるとゲームが途中終了する。
【0139】
即ち例えば、実施形態2のゲーム装置10においては、ロボット44の一又は複数の部位が制限対象部位に設定された場合と、当該一又は複数の制限対象部位が非制限対象部位に設定された場合と、で途中終了条件を異ならしめることになる。実施形態2においては、制限対象部位に設定された部位の組み合わせに基づいて途中終了条件が変更される。即ち、途中終了条件データによって、制限対象部位に設定された部位の組み合わせが関連付けられた途中終了条件が適用されることになる。
【0140】
[2−2.実施形態2において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図12は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図12に示す処理を実行する。なお、実施形態2においても、図9の処理は実行されているものとする。
【0141】
まず、制御部14は、制限対象部位として設定されている部位に変更があるか否かを判定する(S201)。S201においては、例えば、制限対象部位フラグが参照され、フラグの値の変化があるか否かが判定される。例えば、S104において、制限対象部位に設定された部位があった場合、S201において、新たに制限対象部として設定された部位があり、制限対象部位として設定されている部位に変更があると判定される。
【0142】
制限対象部位として設定されている部位に変更がある場合(S201;Y)、制御部14(途中終了部84)は、制限対象部位が途中終了条件の制限を解除する組み合わせになっているか否かを判定する(S202)。例えば、途中終了条件データにおいて、位置関係に関する途中終了条件に対応付けられた組み合わせになっているか否かが判定される。
【0143】
制限を解除する組み合わせになっている場合(S202;Y)、制御部14は、途中終了条件の制限を解除する(S203)。S203においては、例えば、敵キャラクタ48と、ロボット44と、の位置関係に関する条件が途中終了条件として設定される。
【0144】
一方、制限を解除する組み合わせになっていない場合(S202;N)、制御部14は、途中終了条件を制限する(S204)。S204においては、敵キャラクタ46,48と、ロボット44の本体部と、の位置関係に関する条件を途中終了条件から外すように、途中終了条件が変更される。
【0145】
制御部14(途中終了部84)は、実行中のゲームが、S202において変更された途中終了条件を満たすか否かを判定する(S205)。例えば、途中終了条件の制限が解除されている場合、敵キャラクタ48と、ロボット44と、の距離が所定範囲になったか否かが判定される。
【0146】
途中終了条件を満たす場合(S205;Y)、処理は、終了する。即ち、この場合、ゲームが途中終了されることになり、図9に示す処理も終了する。一方、途中終了条件を満たさない場合(S205;N)、処理は、S201に戻る。
【0147】
以上説明した実施形態2のゲーム装置10は、制限対象部位として設定されている部位の組み合わせに基づいて途中終了条件の制限が解除されるか否かが決定される。例えば、ロボット44の本体部が頭44aだけになった場合には、敵キャラクタ48に接触するとゲームオーバーになるが、本体部に他の部位が結合している場合には、敵キャラクタ48に接触してもゲームオーバーにはならない。
【0148】
実施形態2のゲーム装置10によれば、制限対象部位として設定されている部位の組み合わせによって途中終了条件を異ならしめることができる。例えば、制限対象部位が設定されていない場合には、脅威ではなかった敵キャラクタが、ロボット44の本体部が頭44aのみになった場合には脅威になり、ゲームの興趣性が向上する。
【0149】
[3.実施形態3]
以下、実施形態3について説明する。実施形態1及び実施形態2においては、制限対象部位に設定された部位は、例えば、ユーザの操作による移動及び当該部位の役割が制限される。実施形態3においては、制限対象部位に設定された部位のうち、攻撃の役割を与えられた部位については、制限対象部位に設定されても攻撃をすることができる点に特徴がある。例えば、右腕44c及び左腕44dが制限対象部位に設定されて本体部から分離されても、右腕44c及び左腕44dは、敵キャラクタ46,48を攻撃することができる。
【0150】
即ち例えば、実施形態3においては、右腕44cが制限対象部位として設定された場合、右腕44cがフィールド42上に配置されてユーザの操作による移動が制限されるが、ユーザが所定の操作を行うと、フィールド42上に配置された右腕44cは、敵キャラクタ46,48に攻撃をすることが可能になる。フィールド42上に配置される右腕44cの向きは、必ずしも敵キャラクタ46,48の方向を向いていないので、実施形態3においては、フィールド42上にある右腕44cの位置と、敵キャラクタ46,48の位置と、に基づいて攻撃の方向が決定される点に特徴がある。
【0151】
なお、実施形態3のゲーム装置10のハードウェア構成は、実施形態1と同様(図1)であるので、説明を省略する。
【0152】
[3−1.実施形態3の機能ブロック図]
図13は、実施形態3のゲーム装置10において実現される機能ブロック図である。図13に示すように、実施形態3のゲーム装置10においては、実施形態1のゲーム装置10の機能に加えて、通常攻撃実行部90及び分離攻撃実行部92が実現される。
【0153】
[3−1−1.通常攻撃実行部]
通常攻撃実行部90は、制御部14を主として実現される。通常攻撃実行部90は、ゲームキャラクタ(例えば、ロボット44)の複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位(例えば、右腕44c、左腕44d)が非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、本体部に対応する方向に対して当該攻撃部位に攻撃をさせる。
【0154】
ロボット44の部位のうちで攻撃部位となるものは、予め定められていてよい。本実施形態においては、右腕44c及び左腕44dが攻撃部位となるが、他にも例えば、右脚44e、左脚44fが、攻撃をする役割を果たすようにしてもよい。本体部に対応する方向とは、例えば、ロボット44の本体部が向いている方向に対応する方向である。例えば、本体部に対応する方向は、本体部の向きとの角度が所定範囲以内となる方向であり、ゲーム画面60に表示されるアイコン45a及びアイコン45bの方向である。
【0155】
[3−1−2.分離攻撃実行部]
分離攻撃実行部92は、制御部14を主として実現される。分離攻撃実行部92は、一又は複数の攻撃部位が制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、ゲーム空間40に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる。攻撃対象物は、例えば、攻撃部位による攻撃の対象となるものであり、ゲーム空間40に配置されたオブジェクトのうちで予め定められたオブジェクトである。例えば、攻撃対象物は、敵キャラクタ46,48や障害物50等である。
【0156】
この場合、攻撃部位が攻撃する方向は、例えば、攻撃部位が配置されている位置から攻撃対象物の位置に対する方向となる。他にも例えば、攻撃方向は、攻撃部位が配置されている位置と、攻撃対象物の位置と、を結ぶ方向とのなす角度が所定範囲以内となる方向であってもよい。
【0157】
例えば、右腕44c及び左腕44dが制限対象部位として設定された場合、右腕44c及び左腕44dは、ユーザの操作によって移動することはできなくなる。この状態で、ユーザが攻撃する旨の指示を操作した場合、右腕44c及び左腕44dは、フィールド42上に配置された状態で、例えば、周囲にいる敵キャラクタ46,48の方向を向いて攻撃することになる。
【0158】
[3−2.実施形態3において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図14は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図14に示す処理を実行する。
【0159】
制御部14は、ユーザから攻撃をする旨を示す所定の操作を受け付けたか否かを判定する(S301)。この所定の操作とは、即ち、攻撃部位の役割を果たすための予め定められた操作であり、例えば、攻撃部位の一つである右腕44cに対して攻撃を指示するための操作である。
【0160】
なお、ロボット44の各部位の役割を果たすためのユーザの操作は、予め部位が果たすべき役割と対応付けられていてよい。例えば、コントローラ30のボタン毎に、部位が果たすべき役割が対応付けられていてよい。
【0161】
ユーザが所定の操作を行った場合(S301;Y)、制御部14は、この操作に対応する部位が制限対象部位として設定されているか否かを判定する(S302)。例えば、ヒットポイントパラメータデータが参照され、制限対象部位フラグがオンになっているか否かが判定される。
【0162】
制限対象部位として設定されている場合(S302;Y)、制御部14(分離攻撃実行部92)は、この攻撃部位の位置と攻撃対象物の位置とに基づいて決定される方向に対して、攻撃部位に攻撃を行わせる(S303)。例えば、制限対象部位に設定されてフィールド42上に配置されている右腕44cの位置と、この右腕44cの周囲にいる敵キャラクタの位置と、に基づいて攻撃方向が決定される。右腕44cは、この方向に対して攻撃することになる。即ち、制限対象部位として設定された攻撃部位がフィールド42に配置されたまま、役割を果たすように動作することになる。
【0163】
一方、制限対象部位として設定されていない場合(S302;N)、制御部14(通常攻撃実行部90)は、ロボット44の本体部の向きに対応する方向に対して、攻撃部位に攻撃を行わせる(S304)。S304においては、S303とは異なり、移動の制限がなされずに部位の役割が実行される。即ち例えば、攻撃部位が本体部とともに移動しながら、敵キャラクタ46,48を攻撃することになる。
【0164】
一方、ユーザが所定の操作を行わない場合(S301;N)、制御部14は、終了条件を満たすか否かを判定する(S305)。S304の処理は、S110と同様である。終了条件を満たす場合(S305;Y)、処理は終了する。終了条件を満たさない場合(S305;N)、処理はS301に戻る。
【0165】
以上説明した実施形態3のゲーム装置10は、制限対象部位が設定された状態において、ユーザから所定の操作が入力された場合、攻撃部位の位置と、攻撃対象物の位置と、に基づいて決定される方向に攻撃を行わせる。実施形態3のゲーム装置10によれば、攻撃部位が制限対象部位に設定された場合、この制限対象部位は固定位置に配置されるが、この位置から攻撃対象物に向かって攻撃を行わせることができるので、ユーザの操作性を向上することができる。
【0166】
なお、実施形態3においては、ユーザから所定の操作が入力された場合に、制限対象部位が設定された攻撃部位に攻撃させるようにしたが、分離攻撃実行部92は、ロボット44の本体部と、制限対象部位の設定された攻撃部位と、の位置関係が所定の関係になった場合にのみ、攻撃部位に攻撃させるようにしてもよい。即ち例えば、本体部が制限対象部位に近づいた場合にのみ、上記のように、制限対象部位に攻撃を実行させるようにしてもよい。
【0167】
[4.実施形態4]
以下、実施形態4について説明する。実施形態1〜実施形態3においては、制限対象部位が設定された場合、制限対象部位として設定された部位が分離された本体部が、ユーザの操作に基づいて移動する。実施形態4においては、本体部の面のうちで、この分離された部位と結合すべき面(以降、単に切断面という)が、ゲーム画面60に表示されないように制御される点に特徴がある。
【0168】
例えば、実施形態1〜実施形態3において制限対象部位が設定された場合、制限対象部位が本体部から分離されるので、本体部には切断面(接合面)が発生する。ゲームのリアリティを向上するために、例えば、ロボット44内の機構や配線等を表すポリゴンをロボット44内に配置することによって、切断面にロボット44内の機構や配線が表されるようにする必要がある。
【0169】
しかしながら、この場合、ポリゴン数が増大するため、ゲーム画面60を表示するための処理負荷が増大する可能性がある。切断面を簡易なポリゴンに置き換えて表現することも考えられるが、この場合にはリアリティに欠ける可能性がある。実施形態4では、本体部の切断面がゲーム画面60に表示されないように、ロボット44の本体部の移動の仕方を制御することによって、この処理負荷の増大を回避する点に特徴がある。
【0170】
なお、実施形態4におけるゲーム装置10のハードウェア構成は、実施形態1と同様であるので説明を省略する。
【0171】
[4−1.実施形態4のゲーム装置において実現される機能]
図15は、実施形態4におけるゲーム装置10の機能ブロック図である。図15に示すように、実施形態4におけるゲーム装置10は、実施形態1の機能に加えて表示制御部94及び位置関係制御部96を実現する。
【0172】
[4−1−1.表示制御部]
表示制御部94は、制御部14を主として実現される。表示制御部94は、ゲーム空間40を視点から見た様子を示すゲーム画面を表示させる。本実施形態においては、ゲーム空間40に仮想カメラ52が設定されるので、表示制御部94は、仮想カメラ52の視野(視錘台)に含まれるオブジェクトを含むゲーム画面を表示部32に表示させる。
【0173】
[4−1−2.位置関係制御部]
位置関係制御部96は、制御部14を主として実現される。位置関係制御部96は、ゲームキャラクタ(ロボット44)の複数の部位のうちで制限対象部位に設定された部位があり、当該部位がゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面(切断面)がゲーム画面60に表示されないように、視点(仮想カメラ52)及び結合すべき面の位置関係に基づいて、視点の位置及び/若しくは視線方向、並びに/又は、結合すべき面の位置及び/若しくは向きを制御する。
【0174】
即ち例えば、位置関係制御部96は、切断面がゲーム画面60に含まれないように、仮想カメラ52の位置と視線方向及び切断面の代表点と法線方向に基づいて、視点の位置及び/若しくは視線方向、並びに、切断面の位置及び/若しくは向きの少なくとも一方を制御する。ここでは、ロボット44の本体部が転がりながら移動する場合について説明する。
【0175】
図16は、仮想カメラ52と切断面との位置関係が制御される様子を説明する図である。図16に示す場合の切断面Sは、例えば、ロボット44の頭44aが胴体44bと結合すべき面である。
【0176】
ロボット44(ロボット44の本体部)が頭44aのみの状態になった場合、状態データに基づいて移動方法が決定され、ロボット44が転がりながら移動することになる。この場合には、例えば、本体部である頭44aには、回転軸Lが設定される。ロボット44を移動する旨の操作が入力されると、回転軸Lを基準として頭44aが回転し、ユーザの操作によって指示された方向に対して転がる。
【0177】
位置関係制御部96は、例えば、仮想カメラ52の視線方向Vと、切断面Sの法線方向Nと、のずれ角度θに基づいて切断面Sの位置(例えば、代表点Pの位置)若しくは回転軸Lの向きを決定する。又は、位置関係制御部96は、ずれ角度θに基づいて仮想カメラ52の位置若しくは視線方向Vを決定する。
【0178】
具体的には、このずれ角度θが所定範囲である場合(例えば、余弦が正の値になる場合。即ち、ずれ角度θが、−90°〜90°の場合。)には、切断面Sは仮想カメラ52の方向を向かないので、切断面Sがゲーム画面60に含まれないことになる。即ち、頭44aが回転軸Lを中心に回転した場合に、ずれ角度θが所定範囲内に収まるように、切断面Sの位置若しくは回転軸Lの向きが決定される。又は、ずれ角度θが所定範囲内に収まるように、仮想カメラ52の位置若しくは視線方向Vが決定される。
【0179】
なお、切断面Sの位置又は回転軸Lの向きの決定方法は、仮想カメラ52と切断面Sの位置との位置関係に基づいて決定されればよく、上記の決定方法に限られない。同様に、仮想カメラ52の位置又は視線方向Vの決定方法は、上記の決定方法に限られない。
【0180】
他にも例えば、仮想カメラ52の位置及び切断面の代表点Pを結ぶ方向Dと回転軸Lとが一定の位置関係を保つように、切断面Sの位置又は回転軸Lの向き、及び、仮想カメラ52の位置又は視線方向Vが決定されることによって、ロボット44の本体部の切断面Sがゲーム画面60に含まれないように制御されるようにしてもよい。
【0181】
具体的には、仮想カメラ52の位置及び切断面Sの代表点を結ぶ方向Dと法線方向Nとの内積が常に正になるように、回転軸L又は仮想カメラ52の位置が決定される。この内積が正になる場合、切断面Sは、仮想カメラ52の方向を向かないので、切断面Sがゲーム画面60に含まれなくなる。
【0182】
また、ロボット44の本体部が静止する場合、例えば、切断面Sが下(フィールド42側)になるような姿勢(基本姿勢)で静止する。このようにすることによって、切断面Sをゲーム画面60に含ませないようにすることができる。静止したロボット44の本体部が動き出す場合、切断面Sが、仮想カメラ52がある方向とは反対方向を向くようにして頭44aが倒れた後、上記のように回転軸Lが決定されて本体部が動き出すことになる。
【0183】
[4−2.実施形態4のゲーム装置において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図17は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図17に示す処理を実行する。なお、実施形態4においても図9と同様の処理が実行される。
【0184】
まず、制御部14は、制限対象部位フラグを参照して、制限対象部位が設定されているか否かを判定する(S401)。即ち、ゲーム状況データに格納された制限対象部位フラグがオンになっている部位があるか否かが判定される。
【0185】
制限対象部位が設定されている場合(S401;Y)、制御部14は、ロボット44の本体部が回転して移動するか否かを判定する(S402)。例えば、ロボット44の部位のうちで本体部以外の部位の制限対象部位フラグがオンになっているものの組み合わせと状態データとに基づいて判定される。
【0186】
ロボット44が回転して移動する場合(S402;Y)、制御部14は、本体部の切断面がゲーム画面60に含まれないように、本体部の切断面Sの位置及び/若しくは回転軸L、並びに/又は、仮想カメラ52の位置及び/若しくは視線方向Vを制御する(S403)。この場合、例えば、図16を参照して説明したように、ずれ角度θに基づいて制御が行われる。
【0187】
ロボット44が回転して移動しない場合(S402;N)、制御部14は、本体部の切断面がゲーム画面60に含まれないように、本体部の切断面Sの位置及び/若しくは向き(例えば、ロボット44の姿勢)、並びに/又は、仮想カメラ52の位置及び/若しくは視線方向Vを制御する(S404)。例えば、仮想カメラ52及び切断面Sの代表点Pを結ぶ方向と、切断面Sの法線方向Nと、の内積が正になるように、ロボット44の姿勢が制御される。即ち、本体部の向きが制御される場合、S403とは異なり回転軸Lは設定されないので、切断面Sが仮想カメラ52の方向を向かないように、ロボット44の姿勢が制御されることになる。
【0188】
一方、制限対象部位が設定されていない場合(S401;N)、制御部14は、終了条件を満たすか否かを判定する(S405)。S405の処理は、S110と同様である。終了条件を満たす場合(S405;Y)、処理は終了する。終了条件を満たさない場合(S405;N)、処理は、S401に戻る。
【0189】
以上説明したゲーム装置10は、制限対象部位が設定された場合、本体部の切断面Sがゲーム画面60に含まれないようになる。実施形態4のゲーム装置10によれば、複雑な形状を有する切断面がゲーム画面60に含まれないので、ゲーム画面60の表示制御処理を比較的簡易なものとすることができる。
【0190】
なお、実施形態4において、本体部のみの状態になり、制限対象部位を回収した場合、本体部の切断面Sに制限対象部位が結合することによって、切断面をゲーム画面60に含ませないようにすることもできる。例えば、ロボット44が右腕44cを回収した場合、本体部の切断面Sと右腕44cとが結合するようにして、切断面Sをゲーム画面60に含まれないようにしてもよい。
【0191】
以下、上記説明した実施形態の変形例について説明する。
【0192】
[5.変形例]
(1)例えば、図2では省略されているが、フィールド42上には、他に多数のオブジェクトが配置されていてよい。例えば、フィールド42上には、敵のオブジェクト、建物の壁を表すオブジェクト、電車や駅のプラットフォームを表すオブジェクト等が配置されていてよい。
【0193】
例えば、電車のオブジェクトにロボット44が接触した場合、ロボット44は、敵キャラクタ46からの攻撃を受けた場合と同様にダメージが蓄積され、部位を失うようにしてもよい。
【0194】
(2)また例えば、メイン部位にはヒットポイントパラメータが設定されない場合を説明したが、敵キャラクタ46,48の攻撃がメイン部位に当った場合、メイン部位以外の部位のヒットポイントパラメータを所定値だけ減算するようにしてもよい。このようにすることによって、メイン部位が強烈な攻撃を受けた場合、ロボット44が一気にバラバラになるように制御がなされる。
【0195】
(3)また例えば、ロボット44の頭44aがメイン部位として設定される場合を説明したが、ヒットポイントパラメータの値に基づいてメイン部位が決定されるようにしてもよい。即ち例えば、ロボット44の判定対象部位のうちで最もヒットポイントパラメータの値が大きい部位を、メイン部位として設定されるようにしてもよい。
【0196】
この場合、ゲーム装置10は、例えば、ロボット44の判定対象部位のうちで最もダメージを受けていない部位を特定し、当該特定された部位を少なくとも含むように本体部を設定する手段を含む。このように本体部が設定されることによって、ダメージを受けた判定対象部位が外れていき、最終的には、例えば、ヒットポイントパラメータの値が所定範囲とはなっていない部位のみが本体部に残ることになる。
【0197】
(4)また例えば、ユーザの操作によって、ロボット44の部位を制限対象部位に設定できるようにしてもよい。即ち例えば、ロボット44が移動することができない位置に敵キャラクタ46,48がいる場合、ユーザの操作によってロボット44の右腕44cを外して、この位置に投げ込むことによって、移動できない位置にいる敵キャラクタ46,48を攻撃することができるようにしてもよい。この場合、例えば、敵キャラクタ46,48を倒した場合に、制限対象部位フラグがオフになるようにしてもよい。
【0198】
(5)また例えば、ゲーム空間40を、図2に示すような3次元空間として説明したが、本発明に係るゲーム空間は、ロボット44や敵キャラクタ46,48等が、2つの座標要素で管理されるような2次元ゲーム空間であってもよい。
【0199】
(6)また例えば、ゲームキャラクタがロボット44である場合を説明したが、ユーザの操作対象となるゲームキャラクタであればよく、本発明に係るゲームキャラクタは、人型の形状であってもよく、これに限られない。
【0200】
(7)また例えば、本発明は、三人称シューティングゲーム以外のゲームを実行するゲーム装置にも適用することができる。つまり、本発明は、複数の部位を含むゲームキャラクタがゲーム空間を移動するゲームに適用できる。例えば、ロールプレイングゲームを実行するゲーム装置にも、本発明は、適用することができる。
【符号の説明】
【0201】
10 ゲーム装置、11 家庭用ゲーム機、12 バス、14 制御部、16 主記憶、18 画像処理部、20 入出力処理部、22 音声処理部、24 光ディスク再生部、26 ハードディスク、28 通信インタフェース、30 コントローラ、32 表示部、34 音声出力部、36 光ディスク、40 ゲーム空間、42 フィールド、44 ロボット、44a 頭、44b 胴体、44c 右腕、44d 左腕、44e 右脚、44f 左脚、45a,45b アイコン、46,48 敵キャラクタ、50 障害物、52 仮想カメラ、60 ゲーム画面、70 ゲームデータ記憶部、72 判定部、74 制限対象部位設定部、76 移動制御部、78 移動制限部、80 位置関係判定部、82 制限対象部位解除部、84 途中終了部、86 途中終了制限部、88 途中終了制限解除部、90 通常攻撃実行部、92 分離攻撃実行部、94 表示制御部、96 位置関係制御部、L 回転軸、V 視線方向、N 法線方向、P 代表点、S 切断面、D 方向。
【技術分野】
【0001】
本発明は、ゲーム装置、ゲーム装置の制御方法、及びプログラムに関する。
【背景技術】
【0002】
従来、複数の部位(例えば、ロボットのアーム等)を含むゲームキャラクタを用いたゲームが知られている。このようなゲームでは、例えば、ゲームキャラクタのある部位がダメージを受けた場合、その部位が失われるようになっている場合がある。
【0003】
上記のようなゲームとしては、例えば、株式会社コナミデジタルエンタテインメント製のシューティングゲーム「ツインビー」が知られている(非特許文献1)。このゲームにおいては、ユーザが操作するゲームキャラクタが、爆弾を投げるためのアーム(左アーム及び右アーム)を備えている。
【0004】
また、このゲームにおいては、例えば、左アームに敵の攻撃が当たると左アームが失われ、右アームに敵の攻撃が当たると右アームが失われるようになっている。そして、このゲームにおいては、右アーム及び左アームの両方を失ったゲームキャラクタが、ゲーム画面の上方から出現する救急車キャラクタに触れると、右アーム及び左アームの両方が一度に回復されるようになっている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「ツインビーPORTABLE解説書」株式会社コナミデジタルエンタテインメント、2007年1月25日、p.4−5
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のようなゲームでは、失われた部位の回復に関するゲーム性(興趣)を高めるために、例えば、ゲームキャラクタが複数の部位を失っている場合にそれら複数の部位を一度に回復させるのではなく、それら複数の部位を一つずつ回復させていくような態様を採用することが考えられる。そして、このような態様を採用する場合には、失われた複数の部位の回復順序をユーザが決定できるようにし、失われた部位の回復に関するユーザの操作性を向上させることが望ましい。
【0007】
本発明は上記課題に鑑みてなされたものであって、その目的は、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能なゲーム装置、ゲーム装置の制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係るゲーム装置は、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置であって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段と、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段と、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段と、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段と、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段と、を含むことを特徴とする。
【0009】
また、本発明に係るゲーム装置の制御方法は、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置の制御方法であって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定ステップと、前記判定ステップにおける判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定ステップと、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御ステップと、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限ステップと、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定ステップであって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定ステップと、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除ステップと、を含むことを特徴とする。
【0010】
本発明に係るプログラムは、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置としてコンピュータを機能させるためのプログラムであって、前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段、前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段、前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段、前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段、前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段、として前記コンピュータを機能させる。
【0011】
また、本発明に係る情報記憶媒体は、上記のプログラムを記録したコンピュータ読み取り可能な情報記憶媒体である。
【0012】
本発明によれば、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能になる。
【0013】
また、本発明の一態様では、前記ゲーム装置は、前記ゲーム空間に配置される敵キャラクタと、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係である場合に、前記ゲームを途中終了させる途中終了手段と、前記途中終了手段による前記ゲームの途中終了を制限する途中終了制限手段と、前記ゲームキャラクタの複数の部位のうちの複数が前記制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、前記途中終了制限手段による制限を解除する途中終了制限解除手段と、を更に含むことを特徴とする。
【0014】
また、本発明の一態様では、前記ゲームキャラクタの複数の部位には、それぞれの部位が果たすべき役割が与えられており、前記ゲーム装置は、前記ゲームキャラクタの複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位が前記非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、前記本体部に対応する方向に対して当該攻撃部位に攻撃をさせる通常攻撃実行手段と、一又は複数の前記攻撃部位が前記制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、前記ゲーム空間に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる分離攻撃実行手段と、を更に含むことを特徴とする。
【0015】
また、本発明の一態様では、前記ゲーム空間には、視点が設定され、前記ゲーム装置は、前記ゲーム空間を前記視点から見た様子を示すゲーム画面を表示させる表示制御手段と、前記ゲームキャラクタの複数の部位のうちで前記制限対象部位に設定された部位があり、当該部位が前記ゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面が前記ゲーム画面に表示されないように、前記視点及び前記結合すべき面の位置関係に基づいて、前記視点の位置及び/若しくは視線方向、並びに/又は、前記結合すべき面の位置及び/若しくは向きを制御する位置関係制御手段と、を更に含むことを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係るゲーム装置のハードウェア構成を示す。
【図2】ゲーム空間の一例を示す図である。
【図3】表示部に表示されるゲーム画面の一例を示す図である。
【図4】ロボットの部位を示す図である。
【図5】ロボットが右腕を失った場合のゲーム画面の一例である。
【図6】ゲーム装置で実現される機能のうち、本発明に関連する機能を示す機能ブロック図である。
【図7】ゲーム状況データに含まれるデータのうち、ロボットのヒットポイントパラメータデータを示す図である。
【図8】状態データのデータ格納例を示す図である。
【図9】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図10】実施形態2のゲーム装置において実現される機能ブロック図である。
【図11】途中終了条件データのデータ格納例を示す図である。
【図12】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図13】実施形態3のゲーム装置において実現される機能ブロック図である。
【図14】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【図15】実施形態4におけるゲーム装置の機能ブロック図である。
【図16】仮想カメラと切断面との位置関係が制御される様子を説明する図である。
【図17】ゲーム装置においてゲームが起動された場合に実行される処理を示すフロー図である。
【発明を実施するための形態】
【0017】
[1.実施形態]
以下、本発明の実施形態の一例について図面に基づき詳細に説明する。本発明の実施形態に係るゲーム装置は、例えば、家庭用ゲーム機(据置型ゲーム機)、携帯ゲーム機、携帯電話機、携帯情報端末(PDA)又はパーソナルコンピュータ等によって実現される。ここでは、実施形態に係るゲーム装置を家庭用ゲーム機によって実現する場合について説明する。
【0018】
[1−1.ゲーム装置のハードウェア構成]
図1は、本発明の実施形態に係るゲーム装置のハードウェア構成を示す。図1に示すゲーム装置10は、家庭用ゲーム機11、表示部32、音声出力部34、及び光ディスク36(情報記憶媒体)を含む。
【0019】
表示部32及び音声出力部34は、家庭用ゲーム機11に接続される。表示部32は、例えば、家庭用テレビ受像機又は液晶ディスプレイなどである。音声出力部34は、例えば、家庭用テレビ受像機に内蔵されたスピーカ又はヘッドホンなどである。
【0020】
家庭用ゲーム機11は、公知のコンピュータゲームシステムである。家庭用ゲーム機11は、バス12、制御部14、主記憶16、画像処理部18、入出力処理部20、音声処理部22、光ディスク再生部24、ハードディスク26、通信インタフェース28、及びコントローラ30を含む。
【0021】
制御部14は、一又は複数の制御部(例えば、CPU等)を含む。制御部14は、図示しないROMに格納されるオペレーティングシステムや、光ディスク36から読み出されるプログラムに基づいて、家庭用ゲーム機11の各部を制御する処理や情報処理を実行する。
【0022】
主記憶16は、例えば、RAMを含む。光ディスク36から読み出されたプログラム及びデータは、主記憶16に書き込まれる。主記憶16は、制御部14の作業用メモリとしても用いられる。バス12は、アドレス及びデータを家庭用ゲーム機11の各部でやり取りするためのものである。
【0023】
画像処理部18は、VRAMを含む。画像処理部18は、制御部14から供給される画像データに基づいてVRAM上にゲーム画面を描画する。VRAM上に描画されたゲーム画面は、ビデオ信号に変換されて所定のタイミングで表示部32に出力される。
【0024】
入出力処理部20は、制御部14が、音声処理部22、光ディスク再生部24、ハードディスク26、通信インタフェース28、及びコントローラ30にアクセスするためのインタフェースである。
【0025】
音声処理部22は、サウンドバッファを含む。音声処理部22は、光ディスク36からサウンドバッファに読み出された音声データを、音声出力部34から出力する。
【0026】
通信インタフェース28は、インターネットなどの通信ネットワークに、家庭用ゲーム機11を有線又は無線接続するためのインタフェースである。
【0027】
光ディスク再生部24は、光ディスク36に記録されたプログラムやデータを読み取る。本実施形態においては、プログラムやデータを家庭用ゲーム機11に供給するために、光ディスク36が用られる場合を説明するが、メモリカード等の他の情報記憶媒体が用いられて、プログラムやデータが家庭用ゲーム機11に対して供給されるようにしてもよい。他にも例えば、通信ネットワークを介して遠隔地からプログラムやデータが家庭用ゲーム機11に供給されるようにしてもよい。
【0028】
ハードディスク26は、一般的なハードディスク装置(補助記憶装置)である。なお、本実施形態において光ディスク36に記憶されるものとして説明するプログラムやデータは、ハードディスク26に記憶されていてもよい。
【0029】
コントローラ30は、ユーザがゲーム操作を行うための操作部である。家庭用ゲーム機11には、一又は複数のコントローラ30が、有線又は無線接続される。入出力処理部20は、一定周期毎(例えば1/60秒ごと)に、コントローラ30の各操作部材の状態をスキャンする。このスキャン結果を表す操作信号は、バス12を介して制御部14に供給される。制御部14は、この操作信号に基づいてユーザのゲーム操作を判定する。
【0030】
[1−2.ゲーム装置において実行されるゲーム]
ゲーム装置10は、光ディスク36から読み出したゲームプログラムを実行することによって、例えば、ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行する。
【0031】
本実施形態においては、例えば、戦場化した市街地を模したゲーム空間を、ユーザの操作に供されるロボット(ゲームキャラクタ)が移動して、敵キャラクタと戦う三人称シューティング(Third Person Shooting)ゲームが実行される場合について説明する。三人称シューティングゲームが開始されると、例えば、ゲーム空間40が、主記憶16に構築される。
【0032】
図2は、ゲーム空間40の一例を示す図である。図2に示すゲーム空間40は、互いに直交する三つの座標軸(Xw軸、Yw軸、及びZw軸)が設定された仮想的な3次元空間になっている。図2に示すように、ゲーム空間40には、戦場を表すオブジェクトであるフィールド42が配置される。
【0033】
フィールド42上には、例えば、ユーザの操作対象となるゲームキャラクタであるロボット44と、ロボット44に攻撃を加える敵ゲームキャラクタである敵キャラクタ46,48と、障害物を表すオブジェクトである障害物50と、が配置される。各オブジェクトの位置は、例えば、ワールド座標系(Xw−Yw−Zw座標系)の3次元座標で特定される。
【0034】
また、ゲーム空間40には、仮想カメラ52(視点)が設定される。仮想カメラ52は、例えば、ロボット44の背後の所定位置に設定される。仮想カメラ52の視線方向は、例えば、ロボット44の移動方向(又は、体の向き)と一致する。
【0035】
仮想カメラ52の位置は、例えば、ロボット44の位置と所定距離となるような関係が保たれる。即ち、仮想カメラ52は、ロボット44と一定の位置関係を保つので、ロボット44がゲーム空間40内を移動した場合、仮想カメラ52もロボット44の移動に伴って移動する。
【0036】
表示部32には、例えば、ゲーム空間40を仮想カメラ52から見た様子を表すゲーム画面が表示される。このゲーム画面は、ゲーム空間40に配置された各オブジェクトの頂点座標が、所定の座標変換演算を用いてワールド座標系からスクリーン座標系に座標変換されることによって生成される。
【0037】
図3は、表示部32に表示されるゲーム画面60の一例である。図3に示すように、ゲーム画面60には、例えば、仮想カメラ52の視野内にあるオブジェクトが含まれる。即ち、ゲーム画面60には、例えば、ロボット44、敵キャラクタ46,48、障害物50が含まれる。また、ロボット44が敵キャラクタ46,48を攻撃する場合の照準を示すアイコン45a,45bが、ゲーム画面に含まれる。
【0038】
ユーザは、アイコン45a,45bを頼りに敵キャラクタ46,48を攻撃する。本実施形態においては、ロボット44が両手に銃を持っており、この2丁の銃で敵キャラクタ46,48を攻撃する場合を説明する。例えば、アイコン45aは、ロボット44が左手に持っている銃の照準を示す。また例えば、アイコン45bは、ロボット44が右手に持っている銃の照準を示す。
【0039】
ユーザは、ゲーム画面60に含まれるロボット44を操作してゲームをプレイする。例えば、ユーザがコントローラ30を介して操作した方向に、ロボット44が移動する。また例えば、コントローラ30の所定のボタンが押下された場合、ロボット44は、アイコン45a,45bに対応する方向に対して、銃を発射して敵キャラクタ46,48を攻撃する。
【0040】
ゲーム空間40に配置される敵キャラクタ46,48は、所定の行動アルゴリズムに従って自律的に行動する。例えば、敵キャラクタ46は、ロボット44に近づいて攻撃を仕掛けるように行動する。また例えば、敵キャラクタ48は、ロボット44の攻撃から逃げるように行動する。
【0041】
敵キャラクタ46,48がロボット44を攻撃をする場合、ロボット44が、敵キャラクタ46の攻撃を回避したり、障害物50に隠れて攻撃をやり過ごすように、ユーザは、操作を行う。また例えば、ユーザは、敵キャラクタ46,48に反撃をするように操作を行う。
【0042】
本実施形態においては、ロボット44の部位毎に、敵キャラクタ46,48の攻撃によりダメージを受けたか否かが判定される。例えば、ロボット44が敵キャラクタ46から攻撃を受けてロボット44のある部位にダメージが蓄積すると、ロボット44は、この部位を失うようになっている。
【0043】
図4は、ロボットの部位を示す図である。図4に示すように、例えば、ロボット44は、頭44a、胴体44b、右腕44c、左腕44d、右脚44e、及び左脚44fから構成される。以降、これらをまとめて単に「ロボット44の部位」ともいう。
【0044】
ロボット44の複数の部位には、それぞれの部位が果たすべき役割が与えられている。役割とは、ロボット44の各部位がゲームにおいて果たすべき役割である。例えば、胴体44bは、ロボット44の各部位を互いにつなげるための役割が設定されている。
【0045】
また例えば、右腕44cと左腕44dは、敵キャラクタ46,48を攻撃する役割が設定されている。また例えば、右脚44eと左脚44fは、ロボット44を走らせたり歩かせたりする役割が設定されている。実施形態1においては、ロボット44が部位を失うと、原則として、この部位に対応する役割も失われることになる。
【0046】
例えば、ロボット44の右腕44cが敵キャラクタ46によって攻撃され、右腕44cに所定のダメージが蓄積した場合、右腕44cが、胴体44bから外れる。即ち、ロボット44は、敵キャラクタ46の攻撃によって右腕44cを失う。この場合、ロボット44は、右腕44cを使用して敵キャラクタ46,48を攻撃することができなくなる。
【0047】
図5は、ロボット44が右腕44cを失った場合のゲーム画面の一例である。右腕44cにダメージが蓄積すると、図5に示すように、右腕44cが失われる。この右腕44cは、フィールド42上に配置される。この状態で、ユーザの操作によってロボット44を移動させることはできるが、右腕44cは、ユーザの操作によって移動させることはできない。
【0048】
右腕44cは、例えば、敵キャラクタ46がロボット44を攻撃した際に、右腕44cが吹き飛ばされるように外れる。外れた右腕44cは、攻撃の際に敵キャラクタ46が腕を振りかざした方向に落ちる。
【0049】
図5に示す状態において、ロボット44は、右腕44cを用いて敵キャラクタ46,48に対して攻撃ができなくなるので、アイコン45bがゲーム画面から消去される。この状態においては、ロボット44は、左腕44dのみを使用して敵キャラクタ46,48に対して攻撃することになる。
【0050】
ロボット44が部位を失った場合、ユーザは、ロボット44が元の状態(図3の状態)に回復するために、失った部位を回収するように操作を行う。例えば、ロボット44が右腕44cを失った場合(図5の状態)、ユーザは、右腕44cが落ちている場所までロボット44を移動させることによって、右腕44cを回復させることができる。
【0051】
右腕44cが回復した場合、ロボット44は、再び右腕44cを使用して攻撃をすることが可能になる。この場合、ゲーム画面60は、図5に示す状態から図3に示す状態に戻る。即ち、右腕44cが、ロボット44(胴体44b)に再び結合し、アイコン45bが再び表示され、ロボット44は、再び右腕44cを使用して敵キャラクタ46,48を攻撃することができるようになる。
【0052】
本実施形態においては、ロボット44の部位のうちの何れかの部位がメイン部位として設定される。メイン部位とは、ロボット44の部位がすべて外れた場合に、ユーザの操作に供される部位のことである。即ち、ロボット44が敵キャラクタ46,48の攻撃を受け続けて部位が全て失われた場合、最終的には、ユーザの操作に供されるのは、メイン部位(例えば、頭44a)のみとなる。以降、ロボット44の部位のうち、このメイン部位を含む一又は複数の部位の集まりを本体部という。即ち、ユーザの操作対象となるものが本体部である。
【0053】
また、実施形態1においては、本体部がメイン部位のみになった場合に敵キャラクタ46,48の攻撃を本体部が受け続けても、ゲームが途中終了(ゲームオーバー)しないものとする。即ち、実施形態1においては、ロボット44が、敵キャラクタ46,48の攻撃を受けて、部位が全てバラバラになったとしても、ゲームオーバーにはならない場合を説明する。
【0054】
上記のように、本実施形態に係るゲーム装置10においては、ロボット44に含まれる複数の部位のうちの複数が、敵キャラクタ46からの攻撃によって失われる。したがって、ロボット44が複数の部位を失った場合、それぞれの部位を元に戻すために、フィールド42上に配置された複数の部位を一つずつ順番に回収することになる。
【0055】
ロボット44が、メイン部位である頭44a以外の部位を失うと、例えば、頭44aがフィールド42上を転がりながら、他の部位を回収することになる。この状態においては、ロボット44は、少なくとも右腕44c、左腕44dを回収しなければ、ロボット44は敵キャラクタ46,48を攻撃することができない。
【0056】
また例えば、ロボット44が右脚44e及び左脚44fを失うとロボット44が走ることができなくなる。したがって、ロボット44は、少なくとも右脚44e又は左脚44fの何れか一方を回収しなければ、ロボット44は走ることができないことになる。
【0057】
このように、ロボット44が複数の部位を失った場合、回収した部位によって、ロボット44の状態が異なる。本実施形態のゲーム装置10においては、ユーザの操作によって、失った部位を元に戻すことができるので、失った部位の回収順序をユーザに決定させることができ、ユーザの操作性を高めることができる。以降、この技術について、詳細に説明する。
【0058】
[1−3.ゲーム装置において実現される機能]
図6は、ゲーム装置10で実現される機能のうち、本発明に関連する機能を示す機能ブロック図である。図6に示すように、ゲーム装置10は、ゲームデータ記憶部70、判定部72、制限対象部位設定部74、移動制御部76、移動制限部78、位置関係判定部80、及び制限対象部位解除部82を含む。
【0059】
[1−3−1.ゲームデータ記憶部]
ゲームデータ記憶部70は、例えば、主記憶16及び光ディスク36等を主として実現される。ゲームデータ記憶部70は、例えば、三人称シューティングゲームを実現するために必要なデータを記憶する。
【0060】
[ゲーム状況データ]
例えば、三人称シューティングゲームの現在の状況を示すゲーム状況データが、ゲームデータ記憶部70に記憶される。例えば、下記に示すようなデータが、ゲーム状況データに含まれる。
(1)ゲーム空間40におけるロボット44の現在の状態(本体部の位置、姿勢、移動方向、及び移動速度等)を示すデータ
(2)ゲーム空間40における敵キャラクタ46,48の現在の状態(位置、移動方向、及び移動速度等)を示すデータ
(3)ロボット44の現在の生命力や耐久力等を示すヒットポイント(HP)パラメータデータ
(4)敵キャラクタ46,48の現在の生命力や耐久力等を示すヒットポイントパラメータデータ
(5)ロボット44、敵キャラクタ46,48の能力値(攻撃力、守備力等)を示すパラメータ
(6)仮想カメラ52の現在の状態(位置及び視線方向等)を示すデータ
【0061】
図7は、ゲーム状況データに含まれるデータのうち、ロボット44のヒットポイントパラメータデータを示す図である。図7に示すように、例えば、ロボット44の部位を識別する情報と、ダメージを受けると減少する数値情報であるヒットポイントパラメータと、ユーザ操作による移動が制限される部位である制限対象部位を識別するための情報である制限対象部位フラグと、制限対象部位となった部位が配置されている位置と、が対応づけられて格納される。
【0062】
例えば、敵キャラクタ46,48の攻撃によってロボット44の部位がダメージを受けた場合、ダメージを受けた部位に対応するヒットポイントパラメータの値が減少する。また例えば、本実施形態においては、メイン部位(例えば、頭44a)には、ヒットポイントパラメータは設定されないものとする。即ち、メイン部位は、ユーザ操作による移動が制限されないものとする。
【0063】
ヒットポイントパラメータの減少の程度は、例えば、敵キャラクタ46,48の能力値(例えば、攻撃力)とロボット44の能力値(例えば、守備力)との少なくとも一方に基づいて決定される。即ち例えば、所定の当たり判定によって敵キャラクタ46,48の攻撃によりダメージを受けた部位が特定され、この部位に対応するヒットポイントパラメータの値が、敵キャラクタ46,48の能力値及びロボット44の能力値に基づいた数値だけ減少することになる。
【0064】
本実施形態においては、例えば、ヒットポイントパラメータの初期値を100とする。ロボット44の部位のうち、例えば、ヒットポイントパラメータが10以下になった部位が制限対象部位として設定される。即ち、ロボット44は、ヒットポイントパラメータが10以下になった部位を失うことになる。図7に示すデータ格納例の状態においては、ロボット44は、右腕44cを失っていることになる。
【0065】
また例えば、ゲーム画面60に表示されるロボット44の状態は、ヒットポイントパラメータデータに基づいて変更される。つまり、ヒットポイントパラメータデータの制限対象部位フラグがオンになっている部位をロボット44が失っているように、ゲーム画面60におけるロボット44の表示形態が変更される。
【0066】
図7のデータ格納例の場合、ゲーム画面60には、図5のように、右腕44cを失ったロボット44が表示される。右腕44cが配置されている(落ちている)位置が、ヒットポイントパラメータデータに格納されることになる。なお、制限対象部位として設定されていない部位(即ち、制限対象部位フラグがオフになっている部位)の位置は、ゲーム状況データに格納されるロボット44の本体部の位置に基づいて特定される。
【0067】
また、本実施形態においては、ロボット44の判定対象部位がダメージを受ける毎に値が減少するヒットポイントパラメータが用いられる場合を説明するが、ロボット44の判定対象部位のダメージの程度は、他のパラメータによって表現されるようにしてもよい。即ち、ロボット44が受けたダメージの程度は、予め定められた方法によって判定されるようにすればよい。
【0068】
例えば、ロボット44の判定対象部位がダメージを受ける毎に増加されるダメージパラメータが用いられるようにしてもよい。この場合、ダメージパラメータには初期値(例えば、0)であり、ダメージパラメータが所定範囲(例えば、90以上)になった場合に、ロボット44の部位が失われることになる。この部位が回収されて本体部に結合した場合、ダメージパラメータは、初期値に戻る。
【0069】
[状態データ]
また例えば、ゲームデータ記憶部70は、ロボット44に設定されている制限対象部位の組み合わせと、ロボット44の状態(移動方法や表示形態等)と、を対応付けた状態データを記憶する。ゲーム装置10は、例えば、制限対象部位フラグがオンになっている部位と状態データとに基づいて、現在のロボット44の移動方法やゲーム画面60におけるロボットの表示形態を把握することができる。
【0070】
図8は、状態データのデータ格納例を示す図である。図8に示すように、例えば、制限対象部位として設定されている部位と、ロボット44の移動方法及び移動速度と、ロボット44の表示形態と、が対応付けられて状態データに格納される。
【0071】
例えば、ロボット44が、右脚44e又は左脚44fの何れか一方のみを失っている状態の場合、ロボット44は、片脚を失ったような表示形態となり、残っている片脚で飛び跳ねるように移動する。この場合の移動速度は、両脚がある場合よりも遅くなる。
【0072】
また例えば、ロボット44が右脚44e及び左脚44fの両方を失っているが、少なくとも右腕44c又は左腕44dの何れかを失っていない状態の場合、ロボット44は、フィールド42にうつ伏せになるような表示形態となり、腕を使ってほふく前進をするように移動する。この場合の移動速度は、片脚で飛び跳ねるように移動する場合よりも遅くなる。
【0073】
このように、本実施形態においては、例えば、ヒットポイントパラメータデータの制限対象部位フラグと、状態データと、に基づいてロボット44の移動動作の態様が制御される。ロボット44が失った部位を回収して制限対象部位フラグが更新された場合、状態データに基づいてロボット44の表示形態や移動方法等が変更されることになる。
【0074】
[1−3−2.判定部]
判定部72は、制御部14を主として実現される。判定部72は、ゲームキャラクタ(例えば、ロボット44)に含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する。
【0075】
判定対象部位とは、ロボット44の部位のうちでダメージを受けたか否かが判定される部位である。判定対象部位は、予め定められた部位であってよい。本実施形態においては、ロボット44の部位のうち、判定対象部位となるものは、頭44a以外の全ての部位(胴体44b、右腕44c、左腕44d、右脚44e、及び左脚44f)である。即ち例えば、ヒットポイントパラメータデータ(図7)において、ヒットポイントパラメータが設定されている部位が、判定対象部位となる。
【0076】
本実施形態においては、例えば、判定部72は、ゲーム空間40に配置された他のキャラクタ(敵キャラクタ46,48等)から判定対象部位が攻撃を受けたか否かを判定することによって、判定対象部位がダメージを受けたか否かを判定する場合について説明する。例えば、敵キャラクタ46,48とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0077】
他にも例えば、敵キャラクタ46,48が持っている武器とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。また例えば、敵キャラクタ46,48から発せられた攻撃媒体(例えば、弾、レーザー又は魔法等)とロボット44の判定対象部位との間の当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0078】
なお、判定部72が、判定対象部位がダメージを受けたか否かを判定する方法は、予め定められた方法であればよく、これに限られない。他にも例えば、判定部72は、ゲーム空間40に配置された所定の障害物(例えば、ロボット44に対して落ちてくる天井、高電流が流れた鉄線、又は爆弾等)とロボット44の判定対象部位とが接触したか否かを判定する当たり判定処理に基づいて、判定対象部位がダメージを受けたか否かが判定されるようにしてもよい。
【0079】
また例えば、判定部72は、ゲーム空間40に設定された所定領域(例えば、高電流が流れた領域や放射能に汚染された部屋等)内にロボット44の判定対象部位が含まれたか否かを判定する処理に基づいて、判定対象部位がダメージを受けたか否かが判定されるようにしてもよい。また例えば、判定部72は、ロボット44が所定の状態になった場合(例えば、ロボット44がフィールド42に設定された所定領域に侵入して毒に侵された状態になった場合)、所定時間が経過したか否かに基づいて、判定対象部位がダメージを受けたか否かを判定するようにしてもよい。
【0080】
本実施形態においては、例えば、判定対象部位がダメージを受けた場合、ヒットポイントパラメータデータに格納されたヒットポイントパラメータのうち、当該ダメージを受けた判定対象部位に対応する値が、ゲーム状況データ(例えば、能力値を示すパラメータ)に基づいて決定される程度だけ変更される場合について説明する。
【0081】
なお、ヒットポイントパラメータの変更の程度は、予め定められた方法に基づいて決定されればよく、上記の場合に限られない。他にも例えば、判定対象部位がダメージを受けた場合、ヒットポイントパラメータが予め定められた値だけ変更されるようにしてもよい。
【0082】
[1−3−3.制限対象部位設定部]
制限対象部位設定部74は、制御部14を主として実現される。制限対象部位設定部74は、判定部72の判定結果に基づいて、ゲームキャラクタ(ロボット44)に含まれる複数の部位のうちの一又は複数を制限対象部位に設定する。例えば、制限対象部位設定部74は、判定部72によってダメージを受けたと判定された判定対象部位に関するパラメータが所定の条件を満足した場合、この判定対象部位を制限対象部位に設定する。
【0083】
本実施形態においては、制限対象部位設定部74は、判定部72の判定結果に基づいて、判定対象部位のヒットポイントパラメータが所定範囲(例えば、10以下)になった場合、この判定対象部位を制限対象部位に設定する場合について説明する。
【0084】
また、制限対象部位設定部74が、制限対象部位フラグをオンにすることによって、ロボット44の部位を制限対象部位として設定する場合を説明するが、制限対象部位の設定方法は、これに限られない。制限対象部位の設定方法は、ロボット44の部位のうちで、ユーザ操作による移動を制限すべき部位を特定することができる方法であればよい。他にも例えば、制限対象部位を識別するためのテーブルをゲームデータ記憶部70に用意しておき、制限対象部位を識別する情報が格納されることによって、制限対象部位が設定されるようにしてもよい。
【0085】
[1−3−4.移動制御部]
移動制御部76は、制御部14を主として実現される。移動制御部76は、ゲームキャラクタ(例えば、ロボット44)に含まれる複数の部位のうちの、制限対象部位に設定されていない非制限対象部位を含んで構成されるゲームキャラクタの本体部をユーザの操作に基づいて移動させる。
【0086】
つまり、移動制御部76は、例えば、ロボット44の部位のうち制限対象部位に設定された部位以外の部位(非制限対象部位)からなる本体部をユーザの操作に基づいて移動させる。ユーザの操作は、本体部がゲーム空間40を移動すべき方向を指示するためのものであり、例えば、コントローラ30の所定のボタンが押下されることである。
【0087】
[1−3−5.移動制限部]
移動制限部78は、制御部14を主として実現される。移動制限部78は、制限対象部位に設定されている一又は複数の部位をゲームキャラクタ(例えば、ロボット44)の本体部とは分離してゲーム空間40内に配置し、かつ、制限対象部位に設定されている一又は複数の部位がユーザの操作に基づいて移動することを制限する。
【0088】
つまり、移動制限部78は、制限対象部位に設定されている一又は複数の部位をユーザの操作対象(即ち、本体部)から分離して固定位置に配置し、制限対象部位に設定されている一又は複数の部位をユーザの操作に基づいて移動させないようにする。
【0089】
なお、制限対象部位に設定されている部位が配置される位置は、その部位がダメージを受けた際のロボット44の位置に基づいて決定される。例えば、右腕が制限対象部位に設定された場合、右腕の配置位置は、右腕のヒットポイントパラメータが所定範囲(例えば、10以下)になった際(言い換えれば、右腕が制限対象部位に設定される際)のロボット44(右腕)の位置に基づいて決定される。
【0090】
また、制限対象部位に設定される部位が配置される位置と、ロボット44の本体部と、の位置関係は、例えば、当該部位がダメージを受けた際のロボット44の位置及び敵キャラクタ46,48の攻撃媒体の移動方向等に基づいて決定される。即ち例えば、敵キャラクタ46,48が発した弾の移動方向に対してロボット44の部位が飛ばされるようにして、フィールド42上に配置されることになる。
【0091】
本実施形態においては、制限対象部位フラグがオンになっていない非制限対象部位が、本体部としてユーザの操作に基づいて移動し、制限対象部位フラグがオンになっている制限対象部位がユーザの操作に基づいて移動することが制限される場合について説明する。
【0092】
即ち、移動制限部78は、ヒットポイントパラメータが所定範囲(例えば、10以下)になっている部位の制限対象部位フラグをオンにすることによって当該部位を制限対象部位とし、制限対象部位フラグがオンになっている部位については、ユーザの操作による移動をさせないように制限する。また、制限対象部位フラグがオンになっている部位をロボット44の本体部とは分離して固定位置に配置する。上記のように、この固定位置は、例えば、ロボット44の位置に基づいて決定される。この位置は、例えば、ヒットポイントパラメータデータに格納される。
【0093】
なお、制限対象部位として設定された部位は、例えば、フィールド42上に配置された位置からユーザの操作によって移動できないように、移動が制限されるようにすればよい。例えば、制限対象部位として設定された部位は、ユーザの操作による移動ではない動作、即ち例えば、予め定められた動作(分離された右腕44cが手を振る、右脚44eが本体部に近づいて来たり所定範囲内を動き回る等)をするようにしてもよい。
【0094】
また、ゲーム空間40に配置されている分離されたロボット44の制限対象部位は、所定の表示制御処理(例えば、青く光る等)が行われて、ユーザに、どこに制限対象部位が落ちているのかを案内するようにしてもよい。他にも例えば、本体部から分離して一定時間が経過した制限対象部位については、所定の位置関係を満たさなくても、自動的に本体部に結合するようにしてもよい。
【0095】
[1−3−6.位置関係判定部]
位置関係判定部80は、制御部14を主として実現される。位置関係判定部80は、制限対象部位に設定されている部位と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係であるか否かを判定する。特に、複数の部位が制限対象部位に設定されている場合、位置関係判定部80は、制限対象部位に設定されている複数の部位の各々について、当該部位と、ゲームキャラクタの本体部と、の位置関係が前記所定の位置関係であるか否かを判定する。
【0096】
本実施形態においては、位置関係判定部80は、ゲーム状況データを参照して、制限対象部位に設定されている部位が配置されている位置と、ゲームキャラクタの本体部が配置されている位置と、の距離が所定範囲(例えば、所定距離以下)となる位置関係であるか否かを判定する場合について説明する。
【0097】
なお、位置関係判定部80が判定する位置関係は、制限対象部位に設定されている部位の位置と、ゲームキャラクタの本体部の現在の位置と、に基づいて判定されるものであればよく、上記の例に限られない。他にも例えば、上記の距離が所定範囲になり、かつ、ロボット44の移動方向と、制限対象部位が配置されている位置及び本体部の位置を結ぶ方向と、の角度が所定範囲(例えば、所定角度以内)になった場合に、位置関係が所定の位置関係である、と判定されるようにしてもよい。
【0098】
[1−3−7.制限対象部位解除部]
制限対象部位解除部82は、制御部14を主として実現される。制限対象部位解除部82は、制限対象部位に設定されている部位と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係であると判定された場合、当該部位をゲームキャラクタの本体部と結合させ、当該部位を制限対象部位から非制限対象部位に設定する。即ち、制限対象部位解除部82は、所定の位置関係であると判定された制限対象部位に設定されている部位のユーザの操作による移動の制限を解除する。
【0099】
本実施形態においては、制限対象部位解除部82は、所定の位置関係であると判定された制限対象部位のヒットポイントパラメータを所定範囲外の値(例えば、10以上の値)に変更し、制限対象部位フラグをオフにすることによって、制限対象部位に設定された部位を非制限対象部位に戻す場合について説明する。例えば、制限対象部位解除部82は、ヒットポイントパラメータを初期値(例えば、100)にすることによって、制限対象部位に設定された部位を非制限対象部位に戻す。
【0100】
また、この非制限対象部位にさせた部位をゲームキャラクタの本体部と結合するように、ゲーム画面60の表示を更新する。この処理は、例えば、ヒットポイントパラメータデータの制限対象部位フラグと状態データ(図8)とが参照されて、ロボット44の表示形態が特定されることによって行われる。
【0101】
[1−4.ゲーム装置において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図9は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図9に示す処理を実行する。
【0102】
まず、制御部14(判定部72)は、判定対象部位がダメージを受けたか否かを判定する(S101)。S101における判定方法は、先述したように、予め定められた方法(例えば、ロボット44と敵キャラクタ46,48との当たり判定)に基づいて、判定対象部位がダメージを受けたか否かが判定される。
【0103】
判定対象部位がダメージを受けた場合(S101;Y)、制御部14は、ゲーム状況データのヒットポイントパラメータデータを更新する(S102)。即ち例えば、敵キャラクタ46,48の能力値と、ロボット44の能力値と、に基づいて、ダメージを受けた判定対象部位のヒットポイントパラメータの値を減少させることによって、ヒットポイントパラメータデータが更新される。
【0104】
制御部14は、更新されたヒットポイントパラメータデータを参照して、ヒットポイントパラメータが所定範囲(例えば、10以下)になった部位があるか否かを判定する(S103)。ヒットポイントパラメータが所定範囲になった部位がある場合(S103;Y)、制御部14(制限対象部位設定部74)は、ヒットポイントパラメータが所定範囲になった部位を制限対象部位として設定する(S104)。例えば、ヒットポイントパラメータが所定範囲になった部位の制限対象部位フラグをオンにすることによって、制限対象部位が設定される。
【0105】
制御部14は、制限対象部位を本体部から分離してゲーム空間40に配置する(S105)。例えば、敵キャラクタ46,48から攻撃を受けた方向に対して制限対象部位が吹き飛ばされるように、ゲーム画面60の表示処理が行われて、制限対象部位が分離される。制限対象部位が分離された場合のロボットの移動方法、移動速度、及び表示形態は、例えば、状態データ(図8)に基づいて決定される。
【0106】
また、S105において分離された制限対象部位が配置される位置は、例えば、ロボット44の位置及び敵キャラクタ46,48の攻撃媒体の移動方向(例えば、敵キャラクタ46,48が発した弾の進行方向)に基づいて決定される。例えば、ロボット44の判定対象部位がダメージを受けた際のロボット44の位置から、攻撃媒体の移動方向に対応する方向に対して所定距離だけ離れた位置に、制限対象部位が配置される。
【0107】
制限対象部位が配置される位置に関する情報は、ヒットポイントパラメータデータに格納される。S105において制限対象部位が分離されると、図5に示すように、制限対象部位がフィールド42上に配置される。
【0108】
制御部14(移動制御部76)は、制限対象部位に設定されている部位以外の部位、即ち、ロボット44の本体部をユーザの操作に基づいて移動させる(S106)。この場合、制限対象部位に設定されている部位に関しては、ユーザの操作に基づいて移動をさせないように制限されることになる。
【0109】
なお、制限対象部位に設定されている部位がない場合、ロボット44の本体部はロボット44の全部位を含んで構成されることになり、ロボット44の全部位がユーザの操作に基づいて移動することになる。
【0110】
また、ゲーム装置10においては、制限対象部位に設定されている部位の組み合わせによって、ロボット44の移動の仕方及び移動速度が異なるようになっている。例えば、本実施形態においては、制限対象部位に設定されている部位の組み合わせと図8に示す状態データとに基づいて特定される方法及び速度でロボット44が移動する。
【0111】
S101〜S106のようにして、制限対象部位が設定される。制限対象部位が設定された場合、ユーザは、敵キャラクタ46,48を攻撃しづらくなったり、ロボット44を移動させづらくなるので、コントローラ30を操作して本体部を移動させて、フィールド42上に配置された制限対象部位を回収することになる。
【0112】
即ち、制限対象部位が設定された場合、ユーザは、分離された制限対象部位を回復させるように、ゲーム操作を行うことになる。ロボット44の状態は、例えば、制限対象部位の組み合わせ(又は、本体部を構成する部位の組み合わせ)によって変わるので、制限対象部位の回復順によってロボット44の状態は異なる。したがって、ユーザは、自分の好きな順番で制限対象部位を回復するように操作を行うことになる。
【0113】
図9に戻り、制御部14は、ゲーム状況データの制限対象部位フラグを参照して、ロボット44の部位のうちで制限対象部位として設定されている部位があるか否かを判定する(S107)。
【0114】
制限対象部位が設定されている場合(S107;Y)、制御部14(位置関係判定部80)は、本体部と制限対象部位とが所定の位置関係であるか否かを判定する(S108)。S108においては、例えば、ゲーム状況データが参照され、ロボット44の位置と、制限対象部位が配置されている位置と、の位置関係が所定の条件を見たすか否かが判定される。
【0115】
本体部と制限対象部位とが所定の位置関係である場合(S108;Y)、制御部14(制限対象部位解除部82)は、この制限対象部位を本体部と結合させて非制限対象部位に設定(変更)する(S109)。
【0116】
S109においては、まず、所定の位置関係となった制限対象部位の制限対象部位フラグがオフにされる。次いで、この更新された制限対象部位フラグと状態データ(図8)とに基づいて、ロボット44の本体部と上記の制限対象部位とが結合するように、ロボット44の表示形態が更新される。
【0117】
また、制限対象部位フラグがオフにされた部位は、ユーザの操作による移動の制限が解除される。即ち、本体部と結合した部位は、ユーザの操作に基づいて移動するようになる。なお、S109において、制限対象部位が本体部と結合される場合、ロボット44が転がる等のアニメーション処理が施されるようにしてもよい。
【0118】
一方、判定対象部位がダメージを受けていない場合(S101;N)、ヒットポイントパラメータが所定範囲になった部位がない場合(S103;N)、処理は、S107に移行する。また、制限対象部位が設定されていない場合(S107;N)、本体部と制限対象部位とが所定の位置関係でない場合(S108;N)、処理は、S110に移行する。
【0119】
制御部14は、所定の終了条件を満たすか否かを判定する(S110)。終了条件は、予め定められた条件であればよい。実施形態1においては、敵キャラクタ46,48の攻撃等によってゲームが途中終了しないので、終了条件は、例えば、ユーザの操作によってゲームの終了の指示が入力されたか否か、又は、所定のゲームクリアの条件が満たされたか否か等であってよい。他にも例えば、ゲームが途中終了する条件が設定される場合には、この条件が満たされたか否かが判定されてもよい。
【0120】
終了条件を満たす場合(S110;Y)、処理は終了する。終了条件を満たさない場合(S110;N)、処理は、S101に戻る。即ち、制限対象部位になった部位があるか否か、又は、制限対象部位を非制限対象部位に戻すか否か、の処理が、再び行われることになる。
【0121】
以上説明したゲーム装置10は、ロボット44の本体部をユーザの操作に基づいて移動させ、ダメージを受けた部位を制限対象部位として設定する。制限対象部位は、本体部から分離されてユーザの操作による移動が制限される。また、ロボット44の本体部と、制限対象部位と、の位置関係が所定の条件を満たした場合に、制限対象部位の移動の制限が解除され、この部位が、再度ユーザの操作に供されるようになる。
【0122】
実施形態1のゲーム装置10によれば、制限対象部位の回復順をユーザが決定することができるので、複数の部位を含むゲームキャラクタの部位の回復に関するユーザの操作性を向上させることが可能になる。即ち例えば、制限対象部位の組み合わせによってロボット44の状態が異なるので、ユーザの好みに応じた順番で、制限対象部位を回復させることができる。
【0123】
なお、本発明は、以上説明した実施形態1に限定されるものではなく、本発明の趣旨を逸脱しない範囲で適宜変更可能である。以下、本発明に係る他の実施形態及び変形例について説明する。
【0124】
[2.実施形態2]
以下、実施形態2について説明する。実施形態1においては、ゲーム装置10は、ロボット44の判定対象部位がダメージを受けた場合、ロボット44の部位が制限対象部位となり、最終的には頭44a(メイン部位)のみがユーザの操作対象となる。そして、実施形態1においては、敵キャラクタ46,48の攻撃によってゲームが途中終了(ゲームオーバー)することなく、ゲームが続行される。
【0125】
実施形態2においては、制限対象部位が設定された場合に、ゲームが途中終了する条件が変更される点に特徴がある。例えば、制限対象部位が設定されていない場合には、ロボット44が敵キャラクタ48と接触しても、ゲームは途中終了しないが、ロボット44の本体部がメイン部位(例えば、頭44a)だけになった場合に、ロボット44が敵キャラクタ48に捕まるとゲームが途中終了する。
【0126】
なお、実施形態2におけるゲーム装置10のハードウェア構成は、実施形態1と同様(図1)であるので、説明を省略する。
【0127】
[2−1.実施形態2の機能ブロック図]
図10は、実施形態2のゲーム装置10において実現される機能ブロック図である。図10に示すように、実施形態2のゲーム装置10においては、実施形態1のゲーム装置10の機能に加えて、途中終了部84、途中終了制限部86、及び途中終了制限解除部88が実現される。
【0128】
[2−1−1.実施形態2のゲームデータ記憶部]
また、実施形態2のゲームデータ記憶部70は、例えば、実行中のゲームが途中終了するための条件を示す途中終了条件データを記憶する。
【0129】
図11は、途中終了条件データのデータ格納例を示す図である。図11に示すように、途中終了条件データには、例えば、制限対象部位として設定されている部位を識別する情報と、ゲームが途中終了するための途中終了条件と、が対応付けられて格納される。即ち、途中終了条件データによって、制限対象部位の組み合わせと、途中終了条件と、が関連付けられることになる。
【0130】
実施形態2においては、途中終了条件として、敵キャラクタ46,48の位置と、ロボット44の本体部の位置と、の位置関係に関する条件を例に挙げて説明する。位置関係に関する所定の条件は、例えば、ロボット44の本体部の位置と、ゲーム空間40に配置された敵キャラクタ46,48の位置と、によって定まる条件であればよい。例えば、この条件は、これらの距離が所定範囲であるか否か、であってよい。
【0131】
例えば、図11のデータ格納例では、例えば、ロボット44の本体部が頭44aだけになった場合、本体部の位置と、敵キャラクタ48の位置と、が所定の位置関係になった場合に、ゲームが途中終了する。
【0132】
なお、途中終了条件データに格納される途中終了条件は、敵キャラクタ46,48の位置と、ロボット44の本体部の位置と、の位置関係に関する条件であればよい。他にも例えば、敵キャラクタ46,48とロボット44の本体部とが接触するか否か、が途中終了条件となってもよい。
【0133】
[2−1−2.途中終了部]
途中終了部84は、制御部14を主として実現される。途中終了部84は、例えば、ゲーム空間40に配置される敵キャラクタ(例えば、敵キャラクタ46,48)と、ゲームキャラクタ(例えば、ロボット44)の本体部と、の位置関係が所定の位置関係である場合に、ゲームを途中終了させる。
【0134】
実施形態2においては、途中終了部84が、途中終了条件データによって定まる途中終了条件をゲーム状況データが満たすか否かに基づいて、実行中のゲームを途中終了させる場合について説明する。即ち、途中終了部84は、途中終了条件データによって定義される途中終了条件に基づいて、ゲームを途中終了させるか否かを判定することになる。
【0135】
[2−1−3.途中終了制限部]
途中終了制限部86は、制御部14を主として実現される。途中終了制限部86は、例えば、途中終了部84によるゲームの途中終了を制限する。例えば、途中終了制限部86は、敵キャラクタ46,48とロボット44の本体部との位置関係が所定の条件を満たした場合であっても、途中終了部84にゲームを途中終了させないようにする。
【0136】
別の言い方をすれば、途中終了制限部86は、制限対象部位に設定されている部位の組み合わせが所定の組み合わせでない場合に、途中終了部84によるゲームの途中終了を制限する。本実施形態においては、途中終了条件データに格納されるデータのうちで、上記の所定の組み合わせに関連付けて敵キャラクタ46,48とロボット44の本体部との位置関係に関する途中終了条件が格納されることによって、途中終了部84によるゲームの途中終了が制限されることになる。
【0137】
[2−1−4.途中終了制限解除部]
途中終了制限解除部88は、制御部14を主として実現される。途中終了制限解除部88は、ゲームキャラクタ(例えば、ロボット44)の複数の部位のうちの複数が制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、途中終了制限部86による制限を解除する。
【0138】
本実施形態においては、途中終了制限解除部88は、ゲームキャラクタ(ロボット44)に含まれる複数の部位のうちのすべての判定対象部位が制限対象部位に設定されている場合に、途中終了制限部86による制限を解除する場合を説明する。つまり、例えば、頭44a以外のすべての判定対象部位が制限対象部位に設定されている場合に、途中終了制限部86による制限が解除され、敵キャラクタ46,48とロボット44とが所定の位置関係になるとゲームが途中終了する。
【0139】
即ち例えば、実施形態2のゲーム装置10においては、ロボット44の一又は複数の部位が制限対象部位に設定された場合と、当該一又は複数の制限対象部位が非制限対象部位に設定された場合と、で途中終了条件を異ならしめることになる。実施形態2においては、制限対象部位に設定された部位の組み合わせに基づいて途中終了条件が変更される。即ち、途中終了条件データによって、制限対象部位に設定された部位の組み合わせが関連付けられた途中終了条件が適用されることになる。
【0140】
[2−2.実施形態2において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図12は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図12に示す処理を実行する。なお、実施形態2においても、図9の処理は実行されているものとする。
【0141】
まず、制御部14は、制限対象部位として設定されている部位に変更があるか否かを判定する(S201)。S201においては、例えば、制限対象部位フラグが参照され、フラグの値の変化があるか否かが判定される。例えば、S104において、制限対象部位に設定された部位があった場合、S201において、新たに制限対象部として設定された部位があり、制限対象部位として設定されている部位に変更があると判定される。
【0142】
制限対象部位として設定されている部位に変更がある場合(S201;Y)、制御部14(途中終了部84)は、制限対象部位が途中終了条件の制限を解除する組み合わせになっているか否かを判定する(S202)。例えば、途中終了条件データにおいて、位置関係に関する途中終了条件に対応付けられた組み合わせになっているか否かが判定される。
【0143】
制限を解除する組み合わせになっている場合(S202;Y)、制御部14は、途中終了条件の制限を解除する(S203)。S203においては、例えば、敵キャラクタ48と、ロボット44と、の位置関係に関する条件が途中終了条件として設定される。
【0144】
一方、制限を解除する組み合わせになっていない場合(S202;N)、制御部14は、途中終了条件を制限する(S204)。S204においては、敵キャラクタ46,48と、ロボット44の本体部と、の位置関係に関する条件を途中終了条件から外すように、途中終了条件が変更される。
【0145】
制御部14(途中終了部84)は、実行中のゲームが、S202において変更された途中終了条件を満たすか否かを判定する(S205)。例えば、途中終了条件の制限が解除されている場合、敵キャラクタ48と、ロボット44と、の距離が所定範囲になったか否かが判定される。
【0146】
途中終了条件を満たす場合(S205;Y)、処理は、終了する。即ち、この場合、ゲームが途中終了されることになり、図9に示す処理も終了する。一方、途中終了条件を満たさない場合(S205;N)、処理は、S201に戻る。
【0147】
以上説明した実施形態2のゲーム装置10は、制限対象部位として設定されている部位の組み合わせに基づいて途中終了条件の制限が解除されるか否かが決定される。例えば、ロボット44の本体部が頭44aだけになった場合には、敵キャラクタ48に接触するとゲームオーバーになるが、本体部に他の部位が結合している場合には、敵キャラクタ48に接触してもゲームオーバーにはならない。
【0148】
実施形態2のゲーム装置10によれば、制限対象部位として設定されている部位の組み合わせによって途中終了条件を異ならしめることができる。例えば、制限対象部位が設定されていない場合には、脅威ではなかった敵キャラクタが、ロボット44の本体部が頭44aのみになった場合には脅威になり、ゲームの興趣性が向上する。
【0149】
[3.実施形態3]
以下、実施形態3について説明する。実施形態1及び実施形態2においては、制限対象部位に設定された部位は、例えば、ユーザの操作による移動及び当該部位の役割が制限される。実施形態3においては、制限対象部位に設定された部位のうち、攻撃の役割を与えられた部位については、制限対象部位に設定されても攻撃をすることができる点に特徴がある。例えば、右腕44c及び左腕44dが制限対象部位に設定されて本体部から分離されても、右腕44c及び左腕44dは、敵キャラクタ46,48を攻撃することができる。
【0150】
即ち例えば、実施形態3においては、右腕44cが制限対象部位として設定された場合、右腕44cがフィールド42上に配置されてユーザの操作による移動が制限されるが、ユーザが所定の操作を行うと、フィールド42上に配置された右腕44cは、敵キャラクタ46,48に攻撃をすることが可能になる。フィールド42上に配置される右腕44cの向きは、必ずしも敵キャラクタ46,48の方向を向いていないので、実施形態3においては、フィールド42上にある右腕44cの位置と、敵キャラクタ46,48の位置と、に基づいて攻撃の方向が決定される点に特徴がある。
【0151】
なお、実施形態3のゲーム装置10のハードウェア構成は、実施形態1と同様(図1)であるので、説明を省略する。
【0152】
[3−1.実施形態3の機能ブロック図]
図13は、実施形態3のゲーム装置10において実現される機能ブロック図である。図13に示すように、実施形態3のゲーム装置10においては、実施形態1のゲーム装置10の機能に加えて、通常攻撃実行部90及び分離攻撃実行部92が実現される。
【0153】
[3−1−1.通常攻撃実行部]
通常攻撃実行部90は、制御部14を主として実現される。通常攻撃実行部90は、ゲームキャラクタ(例えば、ロボット44)の複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位(例えば、右腕44c、左腕44d)が非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、本体部に対応する方向に対して当該攻撃部位に攻撃をさせる。
【0154】
ロボット44の部位のうちで攻撃部位となるものは、予め定められていてよい。本実施形態においては、右腕44c及び左腕44dが攻撃部位となるが、他にも例えば、右脚44e、左脚44fが、攻撃をする役割を果たすようにしてもよい。本体部に対応する方向とは、例えば、ロボット44の本体部が向いている方向に対応する方向である。例えば、本体部に対応する方向は、本体部の向きとの角度が所定範囲以内となる方向であり、ゲーム画面60に表示されるアイコン45a及びアイコン45bの方向である。
【0155】
[3−1−2.分離攻撃実行部]
分離攻撃実行部92は、制御部14を主として実現される。分離攻撃実行部92は、一又は複数の攻撃部位が制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、ゲーム空間40に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる。攻撃対象物は、例えば、攻撃部位による攻撃の対象となるものであり、ゲーム空間40に配置されたオブジェクトのうちで予め定められたオブジェクトである。例えば、攻撃対象物は、敵キャラクタ46,48や障害物50等である。
【0156】
この場合、攻撃部位が攻撃する方向は、例えば、攻撃部位が配置されている位置から攻撃対象物の位置に対する方向となる。他にも例えば、攻撃方向は、攻撃部位が配置されている位置と、攻撃対象物の位置と、を結ぶ方向とのなす角度が所定範囲以内となる方向であってもよい。
【0157】
例えば、右腕44c及び左腕44dが制限対象部位として設定された場合、右腕44c及び左腕44dは、ユーザの操作によって移動することはできなくなる。この状態で、ユーザが攻撃する旨の指示を操作した場合、右腕44c及び左腕44dは、フィールド42上に配置された状態で、例えば、周囲にいる敵キャラクタ46,48の方向を向いて攻撃することになる。
【0158】
[3−2.実施形態3において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図14は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図14に示す処理を実行する。
【0159】
制御部14は、ユーザから攻撃をする旨を示す所定の操作を受け付けたか否かを判定する(S301)。この所定の操作とは、即ち、攻撃部位の役割を果たすための予め定められた操作であり、例えば、攻撃部位の一つである右腕44cに対して攻撃を指示するための操作である。
【0160】
なお、ロボット44の各部位の役割を果たすためのユーザの操作は、予め部位が果たすべき役割と対応付けられていてよい。例えば、コントローラ30のボタン毎に、部位が果たすべき役割が対応付けられていてよい。
【0161】
ユーザが所定の操作を行った場合(S301;Y)、制御部14は、この操作に対応する部位が制限対象部位として設定されているか否かを判定する(S302)。例えば、ヒットポイントパラメータデータが参照され、制限対象部位フラグがオンになっているか否かが判定される。
【0162】
制限対象部位として設定されている場合(S302;Y)、制御部14(分離攻撃実行部92)は、この攻撃部位の位置と攻撃対象物の位置とに基づいて決定される方向に対して、攻撃部位に攻撃を行わせる(S303)。例えば、制限対象部位に設定されてフィールド42上に配置されている右腕44cの位置と、この右腕44cの周囲にいる敵キャラクタの位置と、に基づいて攻撃方向が決定される。右腕44cは、この方向に対して攻撃することになる。即ち、制限対象部位として設定された攻撃部位がフィールド42に配置されたまま、役割を果たすように動作することになる。
【0163】
一方、制限対象部位として設定されていない場合(S302;N)、制御部14(通常攻撃実行部90)は、ロボット44の本体部の向きに対応する方向に対して、攻撃部位に攻撃を行わせる(S304)。S304においては、S303とは異なり、移動の制限がなされずに部位の役割が実行される。即ち例えば、攻撃部位が本体部とともに移動しながら、敵キャラクタ46,48を攻撃することになる。
【0164】
一方、ユーザが所定の操作を行わない場合(S301;N)、制御部14は、終了条件を満たすか否かを判定する(S305)。S304の処理は、S110と同様である。終了条件を満たす場合(S305;Y)、処理は終了する。終了条件を満たさない場合(S305;N)、処理はS301に戻る。
【0165】
以上説明した実施形態3のゲーム装置10は、制限対象部位が設定された状態において、ユーザから所定の操作が入力された場合、攻撃部位の位置と、攻撃対象物の位置と、に基づいて決定される方向に攻撃を行わせる。実施形態3のゲーム装置10によれば、攻撃部位が制限対象部位に設定された場合、この制限対象部位は固定位置に配置されるが、この位置から攻撃対象物に向かって攻撃を行わせることができるので、ユーザの操作性を向上することができる。
【0166】
なお、実施形態3においては、ユーザから所定の操作が入力された場合に、制限対象部位が設定された攻撃部位に攻撃させるようにしたが、分離攻撃実行部92は、ロボット44の本体部と、制限対象部位の設定された攻撃部位と、の位置関係が所定の関係になった場合にのみ、攻撃部位に攻撃させるようにしてもよい。即ち例えば、本体部が制限対象部位に近づいた場合にのみ、上記のように、制限対象部位に攻撃を実行させるようにしてもよい。
【0167】
[4.実施形態4]
以下、実施形態4について説明する。実施形態1〜実施形態3においては、制限対象部位が設定された場合、制限対象部位として設定された部位が分離された本体部が、ユーザの操作に基づいて移動する。実施形態4においては、本体部の面のうちで、この分離された部位と結合すべき面(以降、単に切断面という)が、ゲーム画面60に表示されないように制御される点に特徴がある。
【0168】
例えば、実施形態1〜実施形態3において制限対象部位が設定された場合、制限対象部位が本体部から分離されるので、本体部には切断面(接合面)が発生する。ゲームのリアリティを向上するために、例えば、ロボット44内の機構や配線等を表すポリゴンをロボット44内に配置することによって、切断面にロボット44内の機構や配線が表されるようにする必要がある。
【0169】
しかしながら、この場合、ポリゴン数が増大するため、ゲーム画面60を表示するための処理負荷が増大する可能性がある。切断面を簡易なポリゴンに置き換えて表現することも考えられるが、この場合にはリアリティに欠ける可能性がある。実施形態4では、本体部の切断面がゲーム画面60に表示されないように、ロボット44の本体部の移動の仕方を制御することによって、この処理負荷の増大を回避する点に特徴がある。
【0170】
なお、実施形態4におけるゲーム装置10のハードウェア構成は、実施形態1と同様であるので説明を省略する。
【0171】
[4−1.実施形態4のゲーム装置において実現される機能]
図15は、実施形態4におけるゲーム装置10の機能ブロック図である。図15に示すように、実施形態4におけるゲーム装置10は、実施形態1の機能に加えて表示制御部94及び位置関係制御部96を実現する。
【0172】
[4−1−1.表示制御部]
表示制御部94は、制御部14を主として実現される。表示制御部94は、ゲーム空間40を視点から見た様子を示すゲーム画面を表示させる。本実施形態においては、ゲーム空間40に仮想カメラ52が設定されるので、表示制御部94は、仮想カメラ52の視野(視錘台)に含まれるオブジェクトを含むゲーム画面を表示部32に表示させる。
【0173】
[4−1−2.位置関係制御部]
位置関係制御部96は、制御部14を主として実現される。位置関係制御部96は、ゲームキャラクタ(ロボット44)の複数の部位のうちで制限対象部位に設定された部位があり、当該部位がゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面(切断面)がゲーム画面60に表示されないように、視点(仮想カメラ52)及び結合すべき面の位置関係に基づいて、視点の位置及び/若しくは視線方向、並びに/又は、結合すべき面の位置及び/若しくは向きを制御する。
【0174】
即ち例えば、位置関係制御部96は、切断面がゲーム画面60に含まれないように、仮想カメラ52の位置と視線方向及び切断面の代表点と法線方向に基づいて、視点の位置及び/若しくは視線方向、並びに、切断面の位置及び/若しくは向きの少なくとも一方を制御する。ここでは、ロボット44の本体部が転がりながら移動する場合について説明する。
【0175】
図16は、仮想カメラ52と切断面との位置関係が制御される様子を説明する図である。図16に示す場合の切断面Sは、例えば、ロボット44の頭44aが胴体44bと結合すべき面である。
【0176】
ロボット44(ロボット44の本体部)が頭44aのみの状態になった場合、状態データに基づいて移動方法が決定され、ロボット44が転がりながら移動することになる。この場合には、例えば、本体部である頭44aには、回転軸Lが設定される。ロボット44を移動する旨の操作が入力されると、回転軸Lを基準として頭44aが回転し、ユーザの操作によって指示された方向に対して転がる。
【0177】
位置関係制御部96は、例えば、仮想カメラ52の視線方向Vと、切断面Sの法線方向Nと、のずれ角度θに基づいて切断面Sの位置(例えば、代表点Pの位置)若しくは回転軸Lの向きを決定する。又は、位置関係制御部96は、ずれ角度θに基づいて仮想カメラ52の位置若しくは視線方向Vを決定する。
【0178】
具体的には、このずれ角度θが所定範囲である場合(例えば、余弦が正の値になる場合。即ち、ずれ角度θが、−90°〜90°の場合。)には、切断面Sは仮想カメラ52の方向を向かないので、切断面Sがゲーム画面60に含まれないことになる。即ち、頭44aが回転軸Lを中心に回転した場合に、ずれ角度θが所定範囲内に収まるように、切断面Sの位置若しくは回転軸Lの向きが決定される。又は、ずれ角度θが所定範囲内に収まるように、仮想カメラ52の位置若しくは視線方向Vが決定される。
【0179】
なお、切断面Sの位置又は回転軸Lの向きの決定方法は、仮想カメラ52と切断面Sの位置との位置関係に基づいて決定されればよく、上記の決定方法に限られない。同様に、仮想カメラ52の位置又は視線方向Vの決定方法は、上記の決定方法に限られない。
【0180】
他にも例えば、仮想カメラ52の位置及び切断面の代表点Pを結ぶ方向Dと回転軸Lとが一定の位置関係を保つように、切断面Sの位置又は回転軸Lの向き、及び、仮想カメラ52の位置又は視線方向Vが決定されることによって、ロボット44の本体部の切断面Sがゲーム画面60に含まれないように制御されるようにしてもよい。
【0181】
具体的には、仮想カメラ52の位置及び切断面Sの代表点を結ぶ方向Dと法線方向Nとの内積が常に正になるように、回転軸L又は仮想カメラ52の位置が決定される。この内積が正になる場合、切断面Sは、仮想カメラ52の方向を向かないので、切断面Sがゲーム画面60に含まれなくなる。
【0182】
また、ロボット44の本体部が静止する場合、例えば、切断面Sが下(フィールド42側)になるような姿勢(基本姿勢)で静止する。このようにすることによって、切断面Sをゲーム画面60に含ませないようにすることができる。静止したロボット44の本体部が動き出す場合、切断面Sが、仮想カメラ52がある方向とは反対方向を向くようにして頭44aが倒れた後、上記のように回転軸Lが決定されて本体部が動き出すことになる。
【0183】
[4−2.実施形態4のゲーム装置において実行される処理]
次に、ゲーム装置10で実行される処理について説明する。図17は、ゲーム装置10においてゲームが起動された場合に実行される処理を示すフロー図である。制御部14が、光ディスク36に記憶されたプログラムに従って、図17に示す処理を実行する。なお、実施形態4においても図9と同様の処理が実行される。
【0184】
まず、制御部14は、制限対象部位フラグを参照して、制限対象部位が設定されているか否かを判定する(S401)。即ち、ゲーム状況データに格納された制限対象部位フラグがオンになっている部位があるか否かが判定される。
【0185】
制限対象部位が設定されている場合(S401;Y)、制御部14は、ロボット44の本体部が回転して移動するか否かを判定する(S402)。例えば、ロボット44の部位のうちで本体部以外の部位の制限対象部位フラグがオンになっているものの組み合わせと状態データとに基づいて判定される。
【0186】
ロボット44が回転して移動する場合(S402;Y)、制御部14は、本体部の切断面がゲーム画面60に含まれないように、本体部の切断面Sの位置及び/若しくは回転軸L、並びに/又は、仮想カメラ52の位置及び/若しくは視線方向Vを制御する(S403)。この場合、例えば、図16を参照して説明したように、ずれ角度θに基づいて制御が行われる。
【0187】
ロボット44が回転して移動しない場合(S402;N)、制御部14は、本体部の切断面がゲーム画面60に含まれないように、本体部の切断面Sの位置及び/若しくは向き(例えば、ロボット44の姿勢)、並びに/又は、仮想カメラ52の位置及び/若しくは視線方向Vを制御する(S404)。例えば、仮想カメラ52及び切断面Sの代表点Pを結ぶ方向と、切断面Sの法線方向Nと、の内積が正になるように、ロボット44の姿勢が制御される。即ち、本体部の向きが制御される場合、S403とは異なり回転軸Lは設定されないので、切断面Sが仮想カメラ52の方向を向かないように、ロボット44の姿勢が制御されることになる。
【0188】
一方、制限対象部位が設定されていない場合(S401;N)、制御部14は、終了条件を満たすか否かを判定する(S405)。S405の処理は、S110と同様である。終了条件を満たす場合(S405;Y)、処理は終了する。終了条件を満たさない場合(S405;N)、処理は、S401に戻る。
【0189】
以上説明したゲーム装置10は、制限対象部位が設定された場合、本体部の切断面Sがゲーム画面60に含まれないようになる。実施形態4のゲーム装置10によれば、複雑な形状を有する切断面がゲーム画面60に含まれないので、ゲーム画面60の表示制御処理を比較的簡易なものとすることができる。
【0190】
なお、実施形態4において、本体部のみの状態になり、制限対象部位を回収した場合、本体部の切断面Sに制限対象部位が結合することによって、切断面をゲーム画面60に含ませないようにすることもできる。例えば、ロボット44が右腕44cを回収した場合、本体部の切断面Sと右腕44cとが結合するようにして、切断面Sをゲーム画面60に含まれないようにしてもよい。
【0191】
以下、上記説明した実施形態の変形例について説明する。
【0192】
[5.変形例]
(1)例えば、図2では省略されているが、フィールド42上には、他に多数のオブジェクトが配置されていてよい。例えば、フィールド42上には、敵のオブジェクト、建物の壁を表すオブジェクト、電車や駅のプラットフォームを表すオブジェクト等が配置されていてよい。
【0193】
例えば、電車のオブジェクトにロボット44が接触した場合、ロボット44は、敵キャラクタ46からの攻撃を受けた場合と同様にダメージが蓄積され、部位を失うようにしてもよい。
【0194】
(2)また例えば、メイン部位にはヒットポイントパラメータが設定されない場合を説明したが、敵キャラクタ46,48の攻撃がメイン部位に当った場合、メイン部位以外の部位のヒットポイントパラメータを所定値だけ減算するようにしてもよい。このようにすることによって、メイン部位が強烈な攻撃を受けた場合、ロボット44が一気にバラバラになるように制御がなされる。
【0195】
(3)また例えば、ロボット44の頭44aがメイン部位として設定される場合を説明したが、ヒットポイントパラメータの値に基づいてメイン部位が決定されるようにしてもよい。即ち例えば、ロボット44の判定対象部位のうちで最もヒットポイントパラメータの値が大きい部位を、メイン部位として設定されるようにしてもよい。
【0196】
この場合、ゲーム装置10は、例えば、ロボット44の判定対象部位のうちで最もダメージを受けていない部位を特定し、当該特定された部位を少なくとも含むように本体部を設定する手段を含む。このように本体部が設定されることによって、ダメージを受けた判定対象部位が外れていき、最終的には、例えば、ヒットポイントパラメータの値が所定範囲とはなっていない部位のみが本体部に残ることになる。
【0197】
(4)また例えば、ユーザの操作によって、ロボット44の部位を制限対象部位に設定できるようにしてもよい。即ち例えば、ロボット44が移動することができない位置に敵キャラクタ46,48がいる場合、ユーザの操作によってロボット44の右腕44cを外して、この位置に投げ込むことによって、移動できない位置にいる敵キャラクタ46,48を攻撃することができるようにしてもよい。この場合、例えば、敵キャラクタ46,48を倒した場合に、制限対象部位フラグがオフになるようにしてもよい。
【0198】
(5)また例えば、ゲーム空間40を、図2に示すような3次元空間として説明したが、本発明に係るゲーム空間は、ロボット44や敵キャラクタ46,48等が、2つの座標要素で管理されるような2次元ゲーム空間であってもよい。
【0199】
(6)また例えば、ゲームキャラクタがロボット44である場合を説明したが、ユーザの操作対象となるゲームキャラクタであればよく、本発明に係るゲームキャラクタは、人型の形状であってもよく、これに限られない。
【0200】
(7)また例えば、本発明は、三人称シューティングゲーム以外のゲームを実行するゲーム装置にも適用することができる。つまり、本発明は、複数の部位を含むゲームキャラクタがゲーム空間を移動するゲームに適用できる。例えば、ロールプレイングゲームを実行するゲーム装置にも、本発明は、適用することができる。
【符号の説明】
【0201】
10 ゲーム装置、11 家庭用ゲーム機、12 バス、14 制御部、16 主記憶、18 画像処理部、20 入出力処理部、22 音声処理部、24 光ディスク再生部、26 ハードディスク、28 通信インタフェース、30 コントローラ、32 表示部、34 音声出力部、36 光ディスク、40 ゲーム空間、42 フィールド、44 ロボット、44a 頭、44b 胴体、44c 右腕、44d 左腕、44e 右脚、44f 左脚、45a,45b アイコン、46,48 敵キャラクタ、50 障害物、52 仮想カメラ、60 ゲーム画面、70 ゲームデータ記憶部、72 判定部、74 制限対象部位設定部、76 移動制御部、78 移動制限部、80 位置関係判定部、82 制限対象部位解除部、84 途中終了部、86 途中終了制限部、88 途中終了制限解除部、90 通常攻撃実行部、92 分離攻撃実行部、94 表示制御部、96 位置関係制御部、L 回転軸、V 視線方向、N 法線方向、P 代表点、S 切断面、D 方向。
【特許請求の範囲】
【請求項1】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置であって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段と、
前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段と、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段と、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段と、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、当該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段と、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段と、
を含むことを特徴とするゲーム装置。
【請求項2】
前記ゲーム装置は、
前記ゲーム空間に配置される敵キャラクタと、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係である場合に、前記ゲームを途中終了させる途中終了手段と、
前記途中終了手段による前記ゲームの途中終了を制限する途中終了制限手段と、
前記ゲームキャラクタの複数の部位のうちの複数が前記制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、前記途中終了制限手段による制限を解除する途中終了制限解除手段と、
を更に含むことを特徴とする請求項1に記載のゲーム装置。
【請求項3】
前記ゲームキャラクタの複数の部位には、それぞれの部位が果たすべき役割が与えられており、
前記ゲーム装置は、
前記ゲームキャラクタの複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位が前記非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、前記本体部に対応する方向に対して当該攻撃部位に攻撃をさせる通常攻撃実行手段と、
一又は複数の前記攻撃部位が前記制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、前記ゲーム空間に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる分離攻撃実行手段と、
を更に含むことを特徴とする請求項1又は2に記載のゲーム装置。
【請求項4】
前記ゲーム空間には、視点が設定され、
前記ゲーム装置は、
前記ゲーム空間を前記視点から見た様子を示すゲーム画面を表示させる表示制御手段と、
前記ゲームキャラクタの複数の部位のうちで前記制限対象部位に設定された部位があり、当該部位が前記ゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面が前記ゲーム画面に表示されないように、前記視点及び前記結合すべき面の位置関係に基づいて、前記視点の位置及び/若しくは視線方向、並びに/又は、前記結合すべき面の位置及び/若しくは向きを制御する位置関係制御手段と、
を更に含むことを特徴とする請求項1〜3の何れか一項に記載のゲーム装置。
【請求項5】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置の制御方法であって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定ステップと、
前記判定ステップにおける判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定ステップと、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御ステップと、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限ステップと、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定ステップであって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定ステップと、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除ステップと、
を含むことを特徴とするゲーム装置の制御方法。
【請求項6】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置としてコンピュータを機能させるためのプログラムであって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段、
前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段、
として前記コンピュータを機能させるためのプログラム。
【請求項1】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置であって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段と、
前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段と、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段と、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段と、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、当該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段と、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段と、
を含むことを特徴とするゲーム装置。
【請求項2】
前記ゲーム装置は、
前記ゲーム空間に配置される敵キャラクタと、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係である場合に、前記ゲームを途中終了させる途中終了手段と、
前記途中終了手段による前記ゲームの途中終了を制限する途中終了制限手段と、
前記ゲームキャラクタの複数の部位のうちの複数が前記制限対象部位に設定されており、かつ、当該制限対象部位に設定されている複数の部位の組み合わせが所定の組み合わせである場合に、前記途中終了制限手段による制限を解除する途中終了制限解除手段と、
を更に含むことを特徴とする請求項1に記載のゲーム装置。
【請求項3】
前記ゲームキャラクタの複数の部位には、それぞれの部位が果たすべき役割が与えられており、
前記ゲーム装置は、
前記ゲームキャラクタの複数の部位のうち、攻撃をする役割が与えられている一又は複数の攻撃部位が前記非制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、前記本体部に対応する方向に対して当該攻撃部位に攻撃をさせる通常攻撃実行手段と、
一又は複数の前記攻撃部位が前記制限対象部位に設定されている状態において、ユーザにより所定の操作が行われた場合、当該攻撃部位の位置と、前記ゲーム空間に配置される攻撃対象物の位置と、に基づいて決定される方向に対して当該攻撃部位に攻撃をさせる分離攻撃実行手段と、
を更に含むことを特徴とする請求項1又は2に記載のゲーム装置。
【請求項4】
前記ゲーム空間には、視点が設定され、
前記ゲーム装置は、
前記ゲーム空間を前記視点から見た様子を示すゲーム画面を表示させる表示制御手段と、
前記ゲームキャラクタの複数の部位のうちで前記制限対象部位に設定された部位があり、当該部位が前記ゲームキャラクタの本体部から分離された場合、当該本体部に含まれる面のうちで当該分離された部位が結合すべき面が前記ゲーム画面に表示されないように、前記視点及び前記結合すべき面の位置関係に基づいて、前記視点の位置及び/若しくは視線方向、並びに/又は、前記結合すべき面の位置及び/若しくは向きを制御する位置関係制御手段と、
を更に含むことを特徴とする請求項1〜3の何れか一項に記載のゲーム装置。
【請求項5】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置の制御方法であって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定ステップと、
前記判定ステップにおける判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定ステップと、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御ステップと、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限ステップと、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定ステップであって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定ステップと、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除ステップと、
を含むことを特徴とするゲーム装置の制御方法。
【請求項6】
ユーザの操作に基づいてゲームキャラクタがゲーム空間内を移動するゲームを実行するゲーム装置としてコンピュータを機能させるためのプログラムであって、
前記ゲームキャラクタに含まれる複数の部位のうちの、複数の判定対象部位の各々について、当該判定対象部位がダメージを受けたか否かを判定する判定手段、
前記判定手段の判定結果に基づいて、前記ゲームキャラクタに含まれる前記複数の部位のうちの一又は複数を制限対象部位に設定する制限対象部位設定手段、
前記ゲームキャラクタに含まれる前記複数の部位のうちの、前記制限対象部位に設定されていない非制限対象部位を含んで構成される前記ゲームキャラクタの本体部を前記ユーザの操作に基づいて移動させる移動制御手段、
前記制限対象部位に設定されている一又は複数の部位を前記ゲームキャラクタの前記本体部とは分離して前記ゲーム空間内に配置し、かつ、前記制限対象部位に設定されている前記一又は複数の部位が前記ユーザの操作に基づいて移動することを制限する移動制限手段、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が所定の位置関係であるか否かを判定する位置関係判定手段であって、複数の部位が前記制限対象部位に設定されている場合には、前記制限対象部位に設定されている複数の部位の各々について、該部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であるか否かを判定する位置関係判定手段、
前記制限対象部位に設定されている部位と、前記ゲームキャラクタの前記本体部と、の位置関係が前記所定の位置関係であると判定された場合、当該部位を前記ゲームキャラクタの前記本体部と結合させ、当該部位を前記制限対象部位から前記非制限対象部位に設定する制限対象部位解除手段、
として前記コンピュータを機能させるためのプログラム。
【図1】


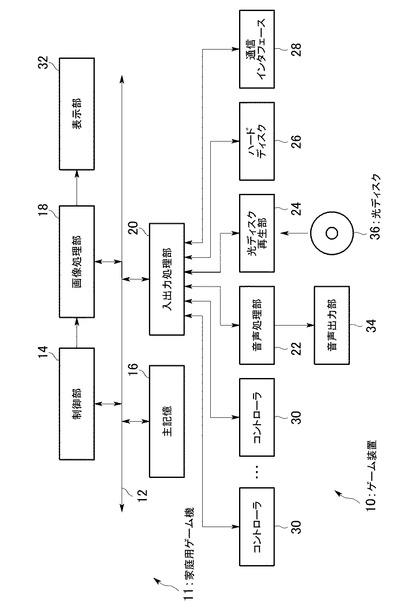
【図2】

【図3】
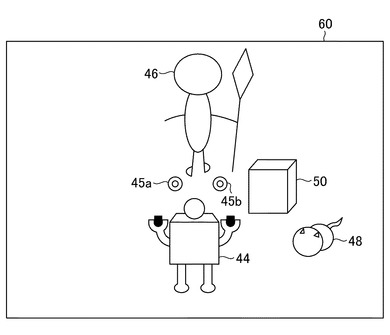
【図4】
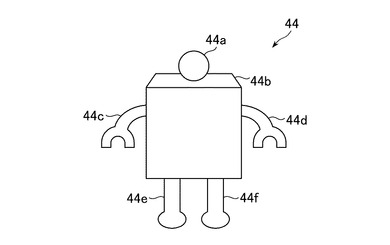
【図5】

【図6】
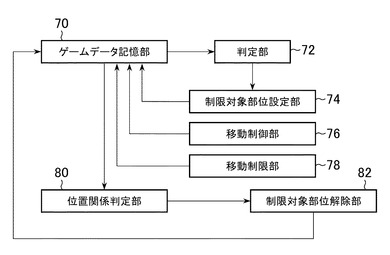
【図7】

【図8】
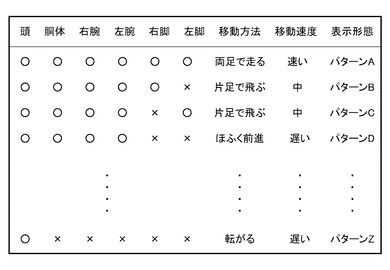
【図9】

【図10】
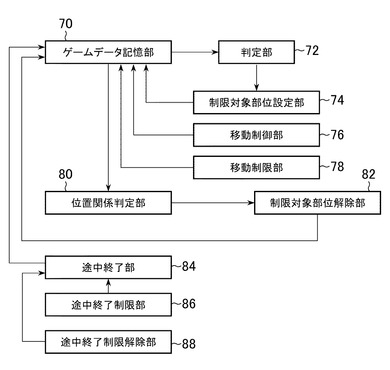
【図11】
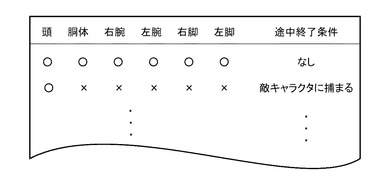
【図12】
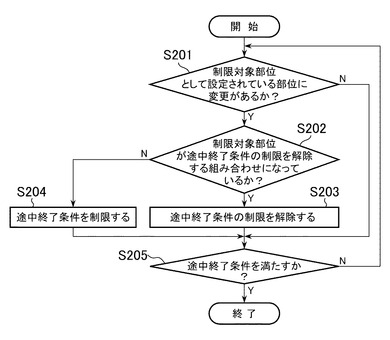
【図13】
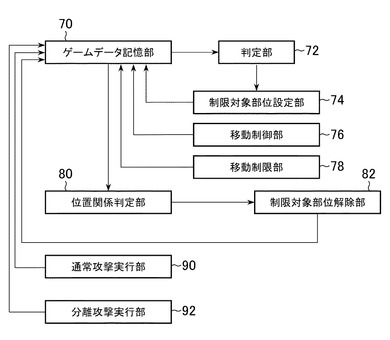
【図14】
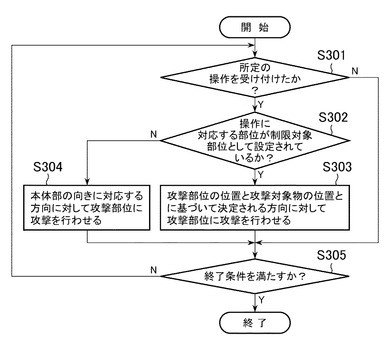
【図15】

【図16】
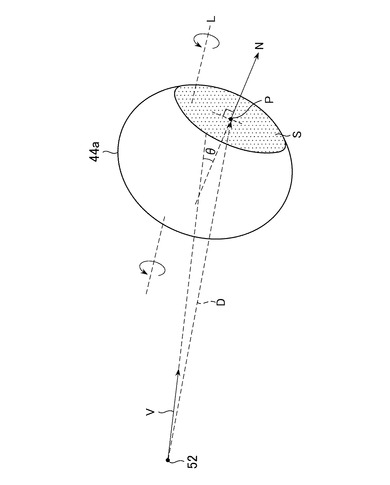
【図17】
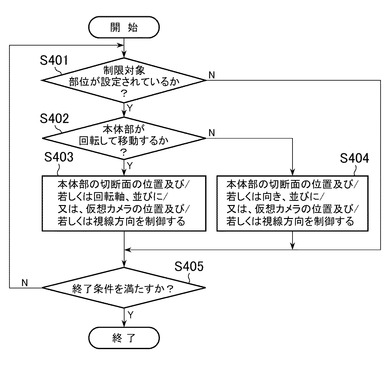
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−156(P2012−156A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−135478(P2010−135478)
【出願日】平成22年6月14日(2010.6.14)
【出願人】(506113602)株式会社コナミデジタルエンタテインメント (1,441)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月14日(2010.6.14)
【出願人】(506113602)株式会社コナミデジタルエンタテインメント (1,441)
【Fターム(参考)】
[ Back to top ]