
ゲーム装置及びコントローラ
【課題】 ダイナミックな操作性を有するゲーム装置を提供することである。
【解決手段】 ゲーム機1は、回路収納体17を含み、回路収納体17には、ゲーム機1の傾きを検出するチルトセンサ46、ゲームプログラムや画像・音声データを格納するROM50、及び各種演算を行いビデオ信号及びオーディオ信号を生成するプロセッサ48が内蔵される。回路収納体17の両側にはそれぞれ、左グリップ13及び右グリップ15が設けられる。プレイヤ11は、グリップ13及び15を握って、ゲーム機1を空中で動かす。プロセッサ48は、ゲーム機1の傾きに応じて、テレビジョンモニタ7に表示された被操作オブジェクト88を変化させる。
【解決手段】 ゲーム機1は、回路収納体17を含み、回路収納体17には、ゲーム機1の傾きを検出するチルトセンサ46、ゲームプログラムや画像・音声データを格納するROM50、及び各種演算を行いビデオ信号及びオーディオ信号を生成するプロセッサ48が内蔵される。回路収納体17の両側にはそれぞれ、左グリップ13及び右グリップ15が設けられる。プレイヤ11は、グリップ13及び15を握って、ゲーム機1を空中で動かす。プロセッサ48は、ゲーム機1の傾きに応じて、テレビジョンモニタ7に表示された被操作オブジェクト88を変化させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、傾きセンサを搭載するゲーム装置及びその関連技術に関する。
【背景技術】
【0002】
特許文献1には、バイクゲーム用コントローラが開示されている。このコントローラは、床などに安定して載置できるように下面を平坦に形成した台座部材と、その台座部材から上方に突設されたハンドル軸部材と、ハンドル軸部材の頂部に設けられバイクハンドルを模したハンドル部材と、ハンドル部材の下に位置させてハンドル軸部材に固定されバイクのカウリングや燃料タンクをイメージさせる形状に形成された車体部材とで構成され、一辺が約30cmの直方体状の空間に収まる程度の大きさをなしている。
【0003】
そして、ユーザは、このコントローラとゲーム装置とをケーブルにより接続し、さらに、ゲーム装置とテレビジョンモニタとをケーブルにより接続して、テレビジョンモニタに映し出されたゲーム画面を見ながら、コントローラを操作してバイクゲームを行う。
【0004】
【特許文献1】特開2002−113264号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、この従来のコントローラは、床に載置して操作することを前提としているため、必ずしもダイナミックな操作が行えるわけではない。つまり、コントローラを持ち上げて自由に動かしながら操作できるものではない。
【0006】
そこで、本発明の目的は、ダイナミックな操作性を有するゲーム装置及びその関連技術を提供することである。
【課題を解決するための手段】
【0007】
本発明の観点によれば、ゲーム装置は、空中で動かされるゲーム装置であって、前記ゲーム装置の傾きを検出する傾き検出手段と、前記傾き検出手段が内部に配置される収納体と、プレイヤの一方の手で把持される円筒状の第1のグリップ部と、前記プレイヤの他方の手で把持される円筒状の第2のグリップ部と、を備え、前記第1のグリップ部及び前記第2のグリップ部は、各々前記収納体の両側に配置される。
【0008】
この構成によれば、ゲーム装置自体を空中で動かして、その傾きを検出するので、ゲーム装置自体の傾きを利用したゲームプログラムを作成できる。従って、プレイヤは、ダイナミックな操作を行いながらゲームを楽しむことができる。
【0009】
ここで、傾き検出手段には、チルトセンサ、加速度センサ及びジャイロセンサ等の傾きが検出可能な様々なセンサが含まれる。
【0010】
上記ゲーム装置は、前記傾き検出手段が検出した前記ゲーム装置の傾きに応じて、表示装置に表示する被操作オブジェクトを変化させるプロセッサをさらに備え、前記プロセッサは、前記収納体の内部に配置される。
【0011】
この構成によれば、プロセッサを備えているので、ゲーム装置を表示装置に接続するだけで、ゲームを行うことができる。
【0012】
上記ゲーム装置において、前記第1のグリップ部及び前記第2のグリップ部の少なくとも一方の内部に、電池をセットする電池ボックスが設けられる。
【0013】
この構成によれば、スペースを効率良く利用できるため、ゲーム装置の大きさを最適化できる。最適化とは、プレイヤが空中でゲーム機を動かすのに適した大きさのことである。
【0014】
上記ゲーム装置において、前記傾き検出手段は、それぞれ、左側、右側、前方下側及び前方上側への前記ゲーム装置の傾きを検出する4つのスイッチからなる
【0015】
本発明の別の観点によれば、コントローラは、表示装置に表示するための映像を生成する情報処理装置に制御信号を与え、かつ、空中で動かされるコントローラであって、前記コントローラの傾きを検出して、その傾きを表す信号を前記制御信号として、前記情報処理装置に与える傾き検出手段と、前記傾き検出手段が内部に配置される収納体と、前記収納体に取り付けられ、あるいは、前記収納体の一部として構成される、プレイヤの手で把持されるグリップ部と、を備える。
【0016】
この構成によれば、コントローラ自体を空中で動かして、その傾きを検出するので、情報処理装置は、コントローラ自体の傾きに応じた映像を生成できる。従って、プレイヤは、ダイナミックな操作を行いながらコントローラ自体の傾きに応じた映像を楽しむことができる。
【0017】
ここで、傾き検出手段には、チルトセンサ、加速度センサ及びジャイロセンサ等の傾きが検出可能な様々なセンサが含まれる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、図中、同一または相当部分については同一の参照符号を付してその説明を援用する。
【0019】
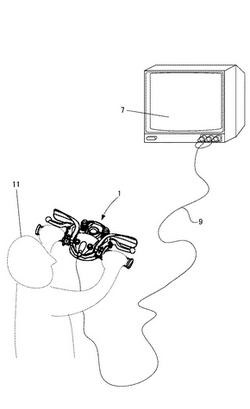
図1は、本発明の実施の形態によるゲームシステムの全体構成を示すブロック図である。図1に示すように、このゲームシステムは、ゲーム機1及びテレビジョンモニタ7を備える。ゲーム機1は、A/Vケーブル9により、テレビジョンモニタ7に接続される。さらに、ゲーム機1には、図示していないが、ACアダプタあるいは電池により電源電圧が供給される。
【0020】
本実施の形態では、ゲーム機1がモトクロスゲームを実行する例を挙げるので、ゲーム機1の外観を、バイクのハンドルを模したものとしている。プレイヤ11は、このハンドル型のゲーム機1を持って、空中で、右に傾けたり(右グリップ15が下、左グリップ13が上)、左に傾けたり(右グリップ15が上、左グリップ13が下)、前方下側に傾けたり、前方上側に傾けたりして、テレビジョンモニタ7に表示された被操作オブジェクト88(後述の図8参照)を操作して、モトクロスゲームを行う。
【0021】
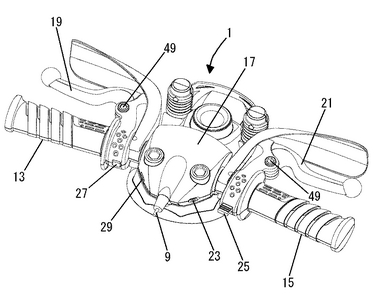
図2は、図1のゲーム機1の斜視図である。図2に示すように、このゲーム機1は、円筒状の左グリップ13、左レバー19、円筒状の右グリップ15、右レバー21、及び回路収納体17を含む。回路収納体17の左右にそれぞれ左グリップ13及び右グリップ15が形成される。左グリップ13の基端部には、画面の一時停止を行うためのポーズスイッチ27が設けられ、右グリップ15の基端部には、画面の被操作オブジェクト88を加速させるためのアクセルスイッチ25が設けられる。また、回路収納体17の左グリップ13側には、DCジャック29が設けられ、右グリップ15側には、電源スイッチ23が設けられる。
【0022】
左レバー19は、左グリップ13に対応して配置される。プレイヤ11が、左レバー19を手前に引くと、後述の左ブレーキスイッチ52がオンになる。一方、右レバー21は、右グリップ15に対応して配置される。プレイヤ11が、右レバー21を手前に引くと、後述の右ブレーキスイッチ54がオンになる。
【0023】
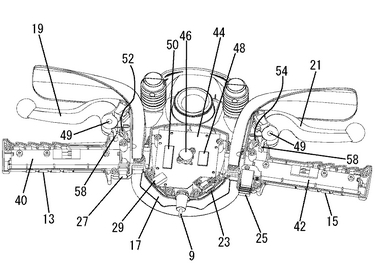
図3は、図2のゲーム機1の内部構成を示す図解図である。図3では、左グリップ13、右グリップ15、及び回路収納体17のそれぞれを構成する上側ハウジングを取り外した状態を示している。
【0024】
図3に示すように、左グリップ13及び右グリップ15の内部には、それぞれ電池ボックス40及び42が設けられている。電池ボックス40及び42のそれぞれには、二本のAAタイプの電池がセットされる。回路収納体17には、基板44が配置される。この基板44には、チルトセンサ46、プロセッサ48、及びROM(Read Only Memory)等の各種回路素子が搭載される。
【0025】
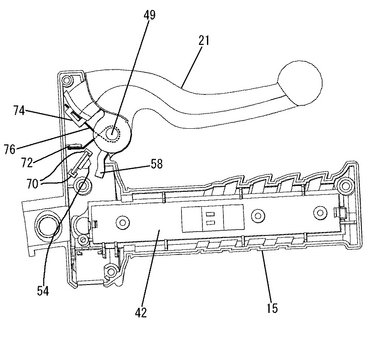
図4は、図3の右レバー21及びその周辺部の拡大図である。図4を参照して、右レバー21の基端近傍には、ソケット70が設けられ、このソケット70に、右ブレーキスイッチ54が装着される。これにより、右ブレーキスイッチ54は、ゲーム機1の内部底面に垂直に起立して配置される。
【0026】
右レバー21の基端の回転軸49には、トーションスプリング76が嵌めこまれている。このトーションスプリング76の一方端は、右レバー21の基端に設けられた受け部74に接触して、これにより、右レバー21を反時計回りに回転させようとする力が働く。一方、トーションスプリング76の他方端は、ゲーム機1の内部底面に起立して設けられた受け部72に接触して、これにより、受け部72には、時計回りに回転する力が働く。従って、トーションスプリング76の弾発力により、右レバー21は、定位置に付勢される。
【0027】
また、右レバー21の基端には、押し部58が形成される。プレイヤ11が、右レバー21を引いて、右レバー21が回転軸49を中心に回転(時計回り)すると、これに伴い、押し部58も回転(時計回り)する。すると、この押し部58により、右ブレーキスイッチ54が押されて、オンになる。そして、プレイヤ11が、右レバー21を放すと、トーションスプリング76の弾発力によって、右レバー21は定位置に戻り、右ブレーキスイッチ54がオフになる。
【0028】
なお、左レバー19及びその周辺部も、右レバー21及びその周辺部と同様の構造及び機構を有しており説明を省略する。
【0029】
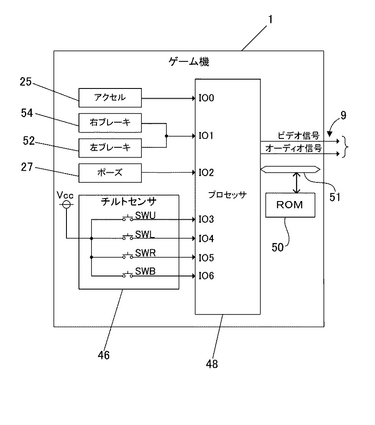
図5は、図2のゲーム機1の電気的構成を示す図である。図5に示すように、ゲーム機1は、プロセッサ48、ROM50、バス51、アクセルスイッチ25、右ブレーキスイッチ54、左ブレーキスイッチ52、ポーズスイッチ27、及びチルトセンサ46を含む。
【0030】
プロセッサ48及びROM50は、バス51に接続される。アクセルスイッチ25の一方接点及びポーズスイッチ27の一方接点は、それぞれ、プロセッサ48の入出力ポートIO0及びIO2に接続される。右ブレーキスイッチ54の一方接点と左ブレーキスイッチ52の一方接点とは、接続されており、その接続点が、プロセッサ48の入出力ポートIO1に接続される。
【0031】
図5では、チルトセンサ46の電気的構成を示す等価回路を示しており、スイッチSWUの一方接点、スイッチSWLの一方接点、スイッチSWRの一方接点、及びスイッチSWBの一方接点は、それぞれ、プロセッサ48の入出力ポートIO3,IO4,IO5及びIO6に接続される。
【0032】
アクセルスイッチ25、ポーズスイッチ27、右ブレーキスイッチ54、左ブレーキスイッチ52、スイッチSWU、スイッチSWL、スイッチSWR、及びスイッチSWBの他方接点には、電源電圧Vccが与えられる。
【0033】
チルトセンサ46は、傾き検出センサであり、ゲーム機1の傾きを検出する。以下、詳細に説明する。本明細書では、傾き検出の説明に当たって、「右」、「左」、「前方」、「下」、及び「上」という語句を使用する。これは、プレイヤ11が、右手でゲーム機1の右グリップ15を握り、左手でゲーム機1の左グリップ13を握った状態において、プレイヤ11から見た方向である。
【0034】
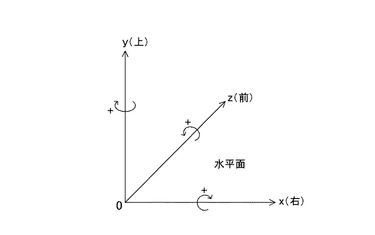
また、チルトセンサ46の中心を始点とした、チルトセンサ46の傾き(つまり、チルトセンサ46が取り付けられた基板44の傾き)の方向を表すベクトル(以下、「傾きベクトル」と呼ぶ。)を想定する。また、図10に示すように、x軸、y軸、及びz軸を有する左手系三次元座標を想定し、水平面がzx平面に平行で、y軸に垂直であるとする。そして、x軸の正方向を右方向とし、z軸の正方向を前方向とし、y軸の正方向を上方向とする。傾きベクトルの始点は座標原点に置く。また、傾きベクトルのy成分は負(重力の方向)とする。
【0035】
また、x軸のまわりの回転では、y→zの向きを正方向とし、y軸のまわりの回転では、z→xの向きを正方向とし、z軸のまわりの回転では、x→yの向きを正方向とする。
【0036】
また、傾きベクトルをzx平面に投影したベクトル(以下、「zxベクトル」と呼ぶ。)を想定する。そして、zxベクトルがx軸の正方向を向いているときのy軸まわりの回転角度を0度とし、反時計回りを正、時計回りを負として、zxベクトルの回転角度を考える。
【0037】
そうすると、本実施の形態で使用するチルトセンサ46では、zxベクトルの回転角度θが、−45≦θ<45の範囲に属する場合は、スイッチSWRがオンし、入出力ポートIO3〜IO6の値は、全体で「0010」となる。このような状態を「右方向への傾き」と呼ぶ。zxベクトルの回転角度θが、45≦θ<135の範囲に属する場合は、スイッチSWBがオンし、入出力ポートIO3〜IO6の値は、全体で「0001」となる。このような状態を「前方下側への傾き」と呼ぶ。
【0038】
zxベクトルの回転角度θが、135≦θ<225の範囲に属する場合は、スイッチSWLがオンし、入出力ポートIO3〜IO6の値は、全体で「0100」となる。このような状態を「左方向への傾き」と呼ぶ。zxベクトルの回転角度θが、225≦θ<315の範囲に属する場合は、スイッチSWUがオンし、入出力ポートIO3〜IO6の値は、全体で「1000」となる。このような状態を「前方上側への傾き」と呼ぶ。
【0039】
ただし、スイッチSWU,SWB,SWRあるいはSWLのいずれかがオンするには、上記条件に加えて、チルトセンサ46(基板44)が水平面に対して、一定角度(例えば30度)以上傾くことが必要である。従って、チルトセンサ46(基板44)が水平面に対して、一定角度以上傾いていない場合は、zxベクトルに関係なく、スイッチSWU,SWB,SWR及びSWLの全てがオフとなり、入出力ポートIO3〜IO6の値は、全体で「0000」である。このような状態を「傾きなし」と呼ぶ。
【0040】
以上のことを別の観点から説明する。チルトセンサ46(基板44)が水平面に平行な状態では、内部のスイッチSWU,SWB,SWL及びSWRの全てがオフになっている。
【0041】
チルトセンサ46(基板44)が右側に傾いた状態では、チルトセンサ46(基板44)がz軸のまわりに負方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、右側に一定角度以上傾くと、スイッチSWRがオンになる。
【0042】
チルトセンサ46(基板44)が左側に傾いた状態では、チルトセンサ46(基板44)がz軸のまわりに正方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、左側に一定角度以上傾くと、スイッチSWLがオンになる。
【0043】
チルトセンサ46(基板44)が前方下側に傾いた状態では、チルトセンサ46(基板44)がx軸のまわりに正方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、前方下側に一定角度以上傾くと、スイッチSWBがオンになる。
【0044】
チルトセンサ46(基板44)が前方上側に傾いた状態では、チルトセンサ46(基板44)がx軸のまわりに負方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、前方上側に一定角度以上傾くと、スイッチSWUがオンになる。
【0045】
プロセッサ48は、以上のようなチルトセンサ46からの信号を受けて、つまり、入出力ポートIO3〜IO6の値を傾きフラグとして、ゲーム機1の傾きを判定して、その傾きに応じて、被操作オブジェクト88(後述の図8参照)を変化させる。また、プロセッサ48は、アクセルスイッチ25からオン信号を受けると、被操作オブジェクト88を加速させる。さらに、プロセッサ48は、右ブレーキスイッチ54及び/又は左ブレーキスイッチ52からオン信号を受けると、被操作オブジェクト88を減速させる。さらに、プロセッサ48は、ポーズスイッチ27からオン信号を受けると、画面を停止させる。
【0046】
図示は省略しているが、プロセッサ48の内部構成を簡単に説明する。プロセッサ48は、CPU(central processing unit)、グラフィックスプロセッサ、サウンドプロセッサおよびDMAコントローラ等の各種機能ブロックを含むとともに、アナログ信号を取り込むときに用いられるA/Dコンバータや、外部の電子回路や電子部品等から入力信号を受け、かつ出力信号をそれらに与える入出力制御回路を含む。上記の入出力ポートIO0〜IO6は、この入出力制御回路に接続される。
【0047】
CPUは、ROM50に格納されたゲームプログラムを実行し、各種演算を行う。グラフィックスプロセッサやサウンドプロセッサは、CPUによる演算結果に従って、ROM50に格納された画像データや音声データを読み込んで、ビデオ信号やオーディオ信号を生成し、A/Vケーブル9に出力する。
【0048】
さらに、プロセッサ48には、図示しないが内部メモリが設けられ、この内部メモリは、例えば、RAM(random access memory)により構成される。内部メモリは、ワーキング領域、カウンタ領域、レジスタ領域、テンポラリデータ領域、及び/又はフラグ領域等として利用される。
【0049】
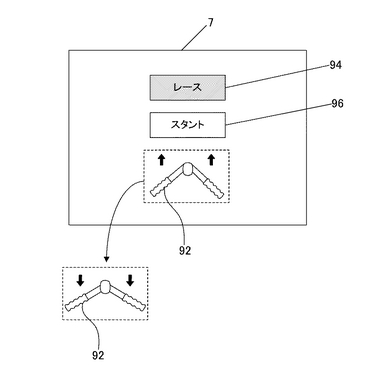
図6は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(レース/スタント)の例示図である。図6に示すように、この画面は、レースモードに入るためのレース選択オブジェクト94、スタントモードに入るためのスタント選択オブジェクト96、及びゲーム機1の操作をガイドする操作ガイド92を含む。
【0050】
レースモードは、選択したコースのタイムを競うゲームモードである。スタントモードは、選択したコースでのアクションを競うゲームモードである。操作ガイド92は、ゲーム機1を前方上側に傾けることを示す表示(矢印が上向き)と、ゲーム機1を前方下側に傾けることを示す表示(矢印が下向き)と、を交互に繰り返す。
【0051】
ゲーム機1を前方上側に傾けると、スイッチSWUがオンになって、プロセッサ48は、レース選択オブジェクト94を選択状態にし、ゲーム機1を前方下側に傾けると、スイッチSWBがオンになって、プロセッサ48は、スタント選択オブジェクト96を選択状態にする。そして、プロセッサ48は、アクセルスイッチ25がオンになると、選択を確定する。
【0052】
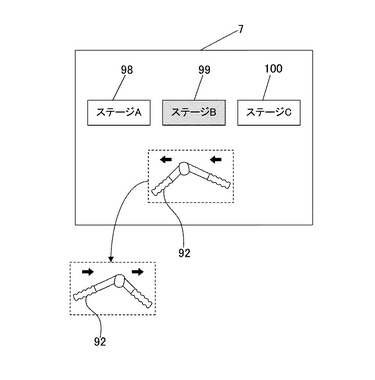
図7は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(ステージA/B/C)の例示図である。図7に示すように、この画面は、ゲームステージを選択するためのステージ選択オブジェクト98,99及び100、並びにゲーム機1の操作をガイドする操作ガイド92を含む。
【0053】
操作ガイド92は、ゲーム機1を左側に傾けることを示す表示(矢印が左向き)と、ゲーム機1を右側に傾けることを示す表示(矢印が右向き)と、を交互に繰り返す。
【0054】
ゲーム機1を左側に傾け(スイッチSWLがオン)、再び水平に戻す動作(スイッチSWL,SWR,SWU及びSWBが全てオフ)を繰り返すことにより、このような動作を検知したプロセッサ48は、ステージ選択オブジェクト99→98→100→99というように選択状態を巡回的に変化させる。一方、ゲーム機1を右側に傾け(スイッチSWRがオン)、再び水平に戻す動作スイッチSWL,SWR,SWU及びSWBが全てオフ)を繰り返すことにより、このような動作を検知したプロセッサ48は、ステージ選択オブジェクト99→100→98→99というように選択状態を巡回的に変化させる。そして、プロセッサ48は、アクセルスイッチ25がオンになると、選択を確定する。
【0055】
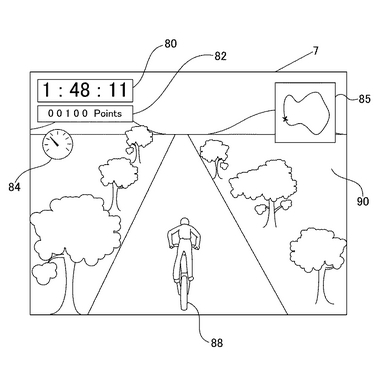
図8は、図1のテレビジョンモニタ7に表示されるゲーム画面の例示図である。このゲーム画面は、スタントモードのものであり、タイム表示部80、ポイント表示部82、エンジン回転数表示部84、コースマップ85、背景90、及び被操作オブジェクト88を含む。
【0056】
本実施の形態では、モトクロスゲームを例に挙げているので、被操作オブジェクト88は、モトクロスバイクに乗ったライダーを表している。タイム表示部80は、画面中の仮想空間における被操作オブジェクト88のスタートから現在までの経過時間を表示する。ポイント表示部82は、被操作オブジェクト88が行うアクションに応じて加算されるポイントを表示する。エンジン回転数表示部84は、被操作オブジェクト88であるモトクロスバイクの仮想上のエンジンの回転数を表示する。コースマップ85は、マップ上のコースに被操作オブジェクト88の現在位置を表示する。
【0057】
プロセッサ48は、チルトセンサ46からの入力、つまり、ゲーム機1の傾きに応じて、被操作オブジェクト88を変化させる。例えば、プロセッサ48は、ゲーム機1が前方下側に傾いたと判断すると、モトクロスバイクが前のめりになるような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が前方上側に傾いたと判断すると、モトクロスバイクのフロントが上がるような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が右側に傾いたと判断すると、モトクロスバイクの方向が右斜めを向くような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が左側に傾いたと判断すると、モトクロスバイクが左斜めを向くような被操作オブジェクト88を表示する。
【0058】
このように、プレイヤ11は、左グリップ13及び右グリップ15を握って、ゲーム機1自体を空中で所望の向きに傾けることで、被操作オブジェクト88を操作できる。
【0059】
また、プロセッサ48は、アクセルスイッチ25がオンになると、背景90の移り変わりを速くして、あたかも被操作オブジェクト88が加速したような演出を行うとともに、エンジン回転数表示部84が示す回転数を増加させる。さらに、プロセッサ48は、右ブレーキスイッチ54及び/又は左ブレーキスイッチ52がオンになると、背景90の移り変わりを遅くして、あたかも被操作オブジェクト88が減速したような演出を行うとともに、エンジン回転数表示部84が示す回転数を減少させる。
【0060】
このように、プレイヤ11は、ゲーム機1のアクセルスイッチ25並びに右ブレーキスイッチ54及び左ブレーキスイッチ52のオン/オフをコントロールすることにより、被操作オブジェクト88のスピードをコントロールできる。
【0061】
以上のように、プレイヤ11は、左グリップ13及び右グリップ15を握って、ゲーム機1自体の傾きを変えたり、スイッチ25,52及び54のオン/オフを制御することにより、あたかもモトクロスバイクを運転しているのと同様の動作により、被操作オブジェクト88を操作できる。
【0062】
なお、プロセッサ48は、特定のシーンとゲーム機1の特定の傾きとの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、あるシーンのときに、ゲーム機1が左側に傾いたと判断した場合に、プロセッサ48は、被操作オブジェクト88に特定の動作をさせる。また、プロセッサ48は、ゲーム機1の特定の複数の傾きの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、この傾きの組み合わせの通り、ゲーム機1が左側、右側、及び前方上側という順番で傾いたと判断した場合に、プロセッサ48は、被操作オブジェクト88に特定の動作をさせる。さらに、プロセッサ48は、ゲーム機1の特定の複数の傾きの組み合わせと特定のシーンとの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、あるシーンのときに、この傾きの組み合わせの通り、ゲーム機1が左側、右側、及び前方上側という順番で傾いたと判断した場合に、プロセッサ48は被操作オブジェクト88に特定の動作をさせる。
【0063】
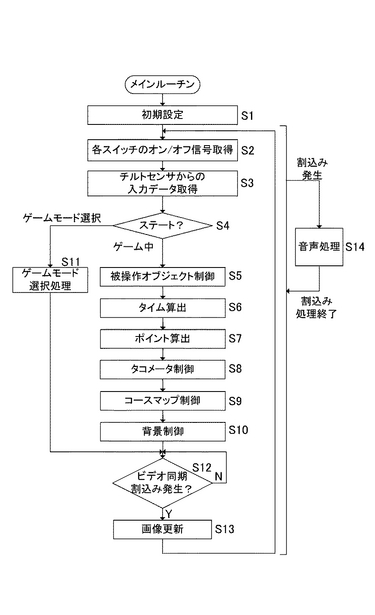
図9は、図5のプロセッサ48によるゲーム処理の流れの一例を示すフローチャートである。図9に示すように、ステップS1にて、プロセッサ48は、システムの初期設定を実行する。ステップS2にて、プロセッサ48は、入出力ポートIO0〜IO2をチェックして、スイッチ25,27,52及び54のオン/オフ情報を取得する。ステップS3にて、プロセッサ48は、入出力ポートIO3〜IO6をチェックして、チルトセンサ46からの4ビットの入力データ「****」を取得する。プロセッサ48は、取得したデータ「****」を傾きフラグの値として内部メモリにセットする。上記のように、プロセッサ48は、傾きフラグが「0000」のときは「傾きなし」、「0010」のときは「右方向への傾き」、「0001」のときは「前方下側への傾き」、「0100」のときは「左方向への傾き」、「1000」のときは「前方上側への傾き」と判断する。
【0064】
ステップS4では、プロセッサ48は、現在のステートに応じて、ステップS5及びS11のいずれかに進む。ただし、最初のステートは、ゲームモードを選択するためのステートであり、プロセッサ48は、ステップS11に進んで、ゲームモードを選択するための処理を実行する(図6及び図7参照)。
【0065】
ステートがゲーム中の場合、プロセッサ48は、ステップS5に進む。ステップS5にて、プロセッサ48は、傾きフラグを参照して、ゲーム機1の傾きに応じた形態の被操作オブジェクト88を設定する。
【0066】
ステップS6にて、プロセッサ48は、タイム表示部80へのタイム表示のために、スタートからの経過時間を算出する。ステップS7にて、プロセッサ48は、ポイント表示部82へのポイント表示のために、被操作オブジェクト88の動作に応じて、ポイントを算出する。ステップS8にて、プロセッサ48は、アクセルスイッチ25並びにブレーキスイッチ52及び54のオン/オフ情報を参照して、仮想のエンジン回転数を算出する。ステップS9にて、プロセッサ48は、コースマップ85に被操作オブジェクト88の現在位置を表示するために、マップ上の現在位置を算出する。ステップS10にて、プロセッサ48は、アクセルスイッチ25並びにブレーキスイッチ52及び54のオン/オフ情報を参照して、それらに応じて、背景90の移り変わりの速度を算出する。
【0067】
ステップS12では、プロセッサ48は、ビデオ同期信号による割り込みが発生したときは(例えば、1/60秒ごと)、ステップS13に進み、ビデオ信号を新たに生成して表示画像を更新し、割り込み待ちの状態であれば、同じステップS12に進む。ステップS13では、プロセッサ48は、ステップS5〜S11の処理結果に応じて、テレビジョンモニタ7に表示される画像(ビデオフレーム)の更新処理を実行する。
【0068】
ステップS14の音声処理は、音声割り込みが発生したときに実行され、それによって、プロセッサ48は、オーディオ信号を生成して、音楽や効果音を出力する。
【0069】
さて、以上のように、本実施の形態によれば、ゲーム機1自体を空中で動かして、その傾きを検出するので、ゲーム機1自体の傾きを利用したゲームプログラムを作成できる。従って、プレイヤは、ダイナミックな操作を行いながらゲームを楽しむことができる。
【0070】
また、本実施の形態では、ゲーム機1は、CPU、グラフィックスプロセッサ、及びサウンドプロセッサ等を内蔵するプロセッサ48を備えているので、ゲーム機1をテレビジョンモニタ7に接続するだけで、ゲームを行うことができる。
【0071】
さらに、本実施の形態では、電池を左グリップ13及び右グリップ15の内部にセットするので、スペースを効率良く利用できるため、ゲーム機1の大きさを最適化できる。最適化とは、プレイヤ11が空中でゲーム機1を動かすのに適した大きさのことである。
【0072】
なお、本発明は、上記の実施の形態に限られるものではなく、その要旨を逸脱しない範囲で種々の態様において実施することが可能であり、例えば、以下のような変形も可能である。
【0073】
(1)上記では、モトクロスゲームを例に挙げ、ゲーム機1の外観を、バイクのハンドルを模したものとしたが、ゲーム機1の外観はこれに限定されない。もちろん、ゲームの内容もモトクロスゲームに限定されない。
【0074】
(2)上記では、傾き検出のためのセンサとして、チルトセンサ46を例に挙げたが、他の周知の方法及びセンサで傾きを検出してもよい。
【0075】
(3)上記では、ゲーム機1は、プレイヤが操作するコントローラとしての機能も有していた。しかし、プロセッサ48やROM50等のゲームを行うのに必要なデータ処理やAV信号の生成を受け持つ部分をゲーム機本体として別個に設け、チルトセンサ46等のコントローラとしての機能を担う部分のみを図2のゲーム機1に残すこともできる。つまり、図2のゲーム機1をコントローラとしてのみ使用することもできる。
【0076】
(4)上記では、チルトセンサ46は、オン/オフのデジタル出力を行うものであった。ただし、xyzの座標軸ごとに、傾きに応じたアナログ出力を行うものであってもよい(2軸又は3軸加速度センサ)。この場合は、プロセッサ48は、座標軸ごとの傾きの度合いに応じて、被操作オブジェクト88を変化させることができる。従って、プレイヤは、より緻密に被操作オブジェクト88を操作できる。また、チルトセンサ46と共に、ジャイロセンサ(1軸〜3軸角速度センサ)を搭載することもできる。この場合は、プロセッサ48は、ジャイロセンサからの角速度信号をも、被操作オブジェクト88の動きに反映できる。なお、チルトセンサ46に代えて、ジャイロセンサ(1軸〜3軸軸角速度センサ)を搭載することもできる。
【図面の簡単な説明】
【0077】
【図1】図1は、本発明の実施の形態によるゲームシステムの全体構成を示すブロック図である。
【図2】図2は、図1のゲーム機1の斜視図である。
【図3】図3は、図2のゲーム機1の内部構成を示す図解図である。
【図4】図4は、図3の右レバー21及びその周辺部の拡大図である。
【図5】図5は、図2のゲーム機1の電気的構成を示す図である。
【図6】図6は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(レース/スタント)の例示図である。
【図7】図7は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(ステージA/B/C)の例示図である。
【図8】図8は、図1のテレビジョンモニタ7に表示されるゲーム画面の例示図である。
【図9】図9は、図5のプロセッサ48によるゲーム処理の流れの一例を示すフローチャートである。
【図10】図10は、図5のチルトセンサ46の説明のための三次元座標系の説明図である。
【符号の説明】
【0078】
1…ゲーム機、7…テレビジョンモニタ、13…左グリップ、15…右グリップ、17…回路収納体、46…チルトセンサ、48…プロセッサ、50…ROM。
【技術分野】
【0001】
本発明は、傾きセンサを搭載するゲーム装置及びその関連技術に関する。
【背景技術】
【0002】
特許文献1には、バイクゲーム用コントローラが開示されている。このコントローラは、床などに安定して載置できるように下面を平坦に形成した台座部材と、その台座部材から上方に突設されたハンドル軸部材と、ハンドル軸部材の頂部に設けられバイクハンドルを模したハンドル部材と、ハンドル部材の下に位置させてハンドル軸部材に固定されバイクのカウリングや燃料タンクをイメージさせる形状に形成された車体部材とで構成され、一辺が約30cmの直方体状の空間に収まる程度の大きさをなしている。
【0003】
そして、ユーザは、このコントローラとゲーム装置とをケーブルにより接続し、さらに、ゲーム装置とテレビジョンモニタとをケーブルにより接続して、テレビジョンモニタに映し出されたゲーム画面を見ながら、コントローラを操作してバイクゲームを行う。
【0004】
【特許文献1】特開2002−113264号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、この従来のコントローラは、床に載置して操作することを前提としているため、必ずしもダイナミックな操作が行えるわけではない。つまり、コントローラを持ち上げて自由に動かしながら操作できるものではない。
【0006】
そこで、本発明の目的は、ダイナミックな操作性を有するゲーム装置及びその関連技術を提供することである。
【課題を解決するための手段】
【0007】
本発明の観点によれば、ゲーム装置は、空中で動かされるゲーム装置であって、前記ゲーム装置の傾きを検出する傾き検出手段と、前記傾き検出手段が内部に配置される収納体と、プレイヤの一方の手で把持される円筒状の第1のグリップ部と、前記プレイヤの他方の手で把持される円筒状の第2のグリップ部と、を備え、前記第1のグリップ部及び前記第2のグリップ部は、各々前記収納体の両側に配置される。
【0008】
この構成によれば、ゲーム装置自体を空中で動かして、その傾きを検出するので、ゲーム装置自体の傾きを利用したゲームプログラムを作成できる。従って、プレイヤは、ダイナミックな操作を行いながらゲームを楽しむことができる。
【0009】
ここで、傾き検出手段には、チルトセンサ、加速度センサ及びジャイロセンサ等の傾きが検出可能な様々なセンサが含まれる。
【0010】
上記ゲーム装置は、前記傾き検出手段が検出した前記ゲーム装置の傾きに応じて、表示装置に表示する被操作オブジェクトを変化させるプロセッサをさらに備え、前記プロセッサは、前記収納体の内部に配置される。
【0011】
この構成によれば、プロセッサを備えているので、ゲーム装置を表示装置に接続するだけで、ゲームを行うことができる。
【0012】
上記ゲーム装置において、前記第1のグリップ部及び前記第2のグリップ部の少なくとも一方の内部に、電池をセットする電池ボックスが設けられる。
【0013】
この構成によれば、スペースを効率良く利用できるため、ゲーム装置の大きさを最適化できる。最適化とは、プレイヤが空中でゲーム機を動かすのに適した大きさのことである。
【0014】
上記ゲーム装置において、前記傾き検出手段は、それぞれ、左側、右側、前方下側及び前方上側への前記ゲーム装置の傾きを検出する4つのスイッチからなる
【0015】
本発明の別の観点によれば、コントローラは、表示装置に表示するための映像を生成する情報処理装置に制御信号を与え、かつ、空中で動かされるコントローラであって、前記コントローラの傾きを検出して、その傾きを表す信号を前記制御信号として、前記情報処理装置に与える傾き検出手段と、前記傾き検出手段が内部に配置される収納体と、前記収納体に取り付けられ、あるいは、前記収納体の一部として構成される、プレイヤの手で把持されるグリップ部と、を備える。
【0016】
この構成によれば、コントローラ自体を空中で動かして、その傾きを検出するので、情報処理装置は、コントローラ自体の傾きに応じた映像を生成できる。従って、プレイヤは、ダイナミックな操作を行いながらコントローラ自体の傾きに応じた映像を楽しむことができる。
【0017】
ここで、傾き検出手段には、チルトセンサ、加速度センサ及びジャイロセンサ等の傾きが検出可能な様々なセンサが含まれる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、図中、同一または相当部分については同一の参照符号を付してその説明を援用する。
【0019】
図1は、本発明の実施の形態によるゲームシステムの全体構成を示すブロック図である。図1に示すように、このゲームシステムは、ゲーム機1及びテレビジョンモニタ7を備える。ゲーム機1は、A/Vケーブル9により、テレビジョンモニタ7に接続される。さらに、ゲーム機1には、図示していないが、ACアダプタあるいは電池により電源電圧が供給される。
【0020】
本実施の形態では、ゲーム機1がモトクロスゲームを実行する例を挙げるので、ゲーム機1の外観を、バイクのハンドルを模したものとしている。プレイヤ11は、このハンドル型のゲーム機1を持って、空中で、右に傾けたり(右グリップ15が下、左グリップ13が上)、左に傾けたり(右グリップ15が上、左グリップ13が下)、前方下側に傾けたり、前方上側に傾けたりして、テレビジョンモニタ7に表示された被操作オブジェクト88(後述の図8参照)を操作して、モトクロスゲームを行う。
【0021】
図2は、図1のゲーム機1の斜視図である。図2に示すように、このゲーム機1は、円筒状の左グリップ13、左レバー19、円筒状の右グリップ15、右レバー21、及び回路収納体17を含む。回路収納体17の左右にそれぞれ左グリップ13及び右グリップ15が形成される。左グリップ13の基端部には、画面の一時停止を行うためのポーズスイッチ27が設けられ、右グリップ15の基端部には、画面の被操作オブジェクト88を加速させるためのアクセルスイッチ25が設けられる。また、回路収納体17の左グリップ13側には、DCジャック29が設けられ、右グリップ15側には、電源スイッチ23が設けられる。
【0022】
左レバー19は、左グリップ13に対応して配置される。プレイヤ11が、左レバー19を手前に引くと、後述の左ブレーキスイッチ52がオンになる。一方、右レバー21は、右グリップ15に対応して配置される。プレイヤ11が、右レバー21を手前に引くと、後述の右ブレーキスイッチ54がオンになる。
【0023】
図3は、図2のゲーム機1の内部構成を示す図解図である。図3では、左グリップ13、右グリップ15、及び回路収納体17のそれぞれを構成する上側ハウジングを取り外した状態を示している。
【0024】
図3に示すように、左グリップ13及び右グリップ15の内部には、それぞれ電池ボックス40及び42が設けられている。電池ボックス40及び42のそれぞれには、二本のAAタイプの電池がセットされる。回路収納体17には、基板44が配置される。この基板44には、チルトセンサ46、プロセッサ48、及びROM(Read Only Memory)等の各種回路素子が搭載される。
【0025】
図4は、図3の右レバー21及びその周辺部の拡大図である。図4を参照して、右レバー21の基端近傍には、ソケット70が設けられ、このソケット70に、右ブレーキスイッチ54が装着される。これにより、右ブレーキスイッチ54は、ゲーム機1の内部底面に垂直に起立して配置される。
【0026】
右レバー21の基端の回転軸49には、トーションスプリング76が嵌めこまれている。このトーションスプリング76の一方端は、右レバー21の基端に設けられた受け部74に接触して、これにより、右レバー21を反時計回りに回転させようとする力が働く。一方、トーションスプリング76の他方端は、ゲーム機1の内部底面に起立して設けられた受け部72に接触して、これにより、受け部72には、時計回りに回転する力が働く。従って、トーションスプリング76の弾発力により、右レバー21は、定位置に付勢される。
【0027】
また、右レバー21の基端には、押し部58が形成される。プレイヤ11が、右レバー21を引いて、右レバー21が回転軸49を中心に回転(時計回り)すると、これに伴い、押し部58も回転(時計回り)する。すると、この押し部58により、右ブレーキスイッチ54が押されて、オンになる。そして、プレイヤ11が、右レバー21を放すと、トーションスプリング76の弾発力によって、右レバー21は定位置に戻り、右ブレーキスイッチ54がオフになる。
【0028】
なお、左レバー19及びその周辺部も、右レバー21及びその周辺部と同様の構造及び機構を有しており説明を省略する。
【0029】
図5は、図2のゲーム機1の電気的構成を示す図である。図5に示すように、ゲーム機1は、プロセッサ48、ROM50、バス51、アクセルスイッチ25、右ブレーキスイッチ54、左ブレーキスイッチ52、ポーズスイッチ27、及びチルトセンサ46を含む。
【0030】
プロセッサ48及びROM50は、バス51に接続される。アクセルスイッチ25の一方接点及びポーズスイッチ27の一方接点は、それぞれ、プロセッサ48の入出力ポートIO0及びIO2に接続される。右ブレーキスイッチ54の一方接点と左ブレーキスイッチ52の一方接点とは、接続されており、その接続点が、プロセッサ48の入出力ポートIO1に接続される。
【0031】
図5では、チルトセンサ46の電気的構成を示す等価回路を示しており、スイッチSWUの一方接点、スイッチSWLの一方接点、スイッチSWRの一方接点、及びスイッチSWBの一方接点は、それぞれ、プロセッサ48の入出力ポートIO3,IO4,IO5及びIO6に接続される。
【0032】
アクセルスイッチ25、ポーズスイッチ27、右ブレーキスイッチ54、左ブレーキスイッチ52、スイッチSWU、スイッチSWL、スイッチSWR、及びスイッチSWBの他方接点には、電源電圧Vccが与えられる。
【0033】
チルトセンサ46は、傾き検出センサであり、ゲーム機1の傾きを検出する。以下、詳細に説明する。本明細書では、傾き検出の説明に当たって、「右」、「左」、「前方」、「下」、及び「上」という語句を使用する。これは、プレイヤ11が、右手でゲーム機1の右グリップ15を握り、左手でゲーム機1の左グリップ13を握った状態において、プレイヤ11から見た方向である。
【0034】
また、チルトセンサ46の中心を始点とした、チルトセンサ46の傾き(つまり、チルトセンサ46が取り付けられた基板44の傾き)の方向を表すベクトル(以下、「傾きベクトル」と呼ぶ。)を想定する。また、図10に示すように、x軸、y軸、及びz軸を有する左手系三次元座標を想定し、水平面がzx平面に平行で、y軸に垂直であるとする。そして、x軸の正方向を右方向とし、z軸の正方向を前方向とし、y軸の正方向を上方向とする。傾きベクトルの始点は座標原点に置く。また、傾きベクトルのy成分は負(重力の方向)とする。
【0035】
また、x軸のまわりの回転では、y→zの向きを正方向とし、y軸のまわりの回転では、z→xの向きを正方向とし、z軸のまわりの回転では、x→yの向きを正方向とする。
【0036】
また、傾きベクトルをzx平面に投影したベクトル(以下、「zxベクトル」と呼ぶ。)を想定する。そして、zxベクトルがx軸の正方向を向いているときのy軸まわりの回転角度を0度とし、反時計回りを正、時計回りを負として、zxベクトルの回転角度を考える。
【0037】
そうすると、本実施の形態で使用するチルトセンサ46では、zxベクトルの回転角度θが、−45≦θ<45の範囲に属する場合は、スイッチSWRがオンし、入出力ポートIO3〜IO6の値は、全体で「0010」となる。このような状態を「右方向への傾き」と呼ぶ。zxベクトルの回転角度θが、45≦θ<135の範囲に属する場合は、スイッチSWBがオンし、入出力ポートIO3〜IO6の値は、全体で「0001」となる。このような状態を「前方下側への傾き」と呼ぶ。
【0038】
zxベクトルの回転角度θが、135≦θ<225の範囲に属する場合は、スイッチSWLがオンし、入出力ポートIO3〜IO6の値は、全体で「0100」となる。このような状態を「左方向への傾き」と呼ぶ。zxベクトルの回転角度θが、225≦θ<315の範囲に属する場合は、スイッチSWUがオンし、入出力ポートIO3〜IO6の値は、全体で「1000」となる。このような状態を「前方上側への傾き」と呼ぶ。
【0039】
ただし、スイッチSWU,SWB,SWRあるいはSWLのいずれかがオンするには、上記条件に加えて、チルトセンサ46(基板44)が水平面に対して、一定角度(例えば30度)以上傾くことが必要である。従って、チルトセンサ46(基板44)が水平面に対して、一定角度以上傾いていない場合は、zxベクトルに関係なく、スイッチSWU,SWB,SWR及びSWLの全てがオフとなり、入出力ポートIO3〜IO6の値は、全体で「0000」である。このような状態を「傾きなし」と呼ぶ。
【0040】
以上のことを別の観点から説明する。チルトセンサ46(基板44)が水平面に平行な状態では、内部のスイッチSWU,SWB,SWL及びSWRの全てがオフになっている。
【0041】
チルトセンサ46(基板44)が右側に傾いた状態では、チルトセンサ46(基板44)がz軸のまわりに負方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、右側に一定角度以上傾くと、スイッチSWRがオンになる。
【0042】
チルトセンサ46(基板44)が左側に傾いた状態では、チルトセンサ46(基板44)がz軸のまわりに正方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、左側に一定角度以上傾くと、スイッチSWLがオンになる。
【0043】
チルトセンサ46(基板44)が前方下側に傾いた状態では、チルトセンサ46(基板44)がx軸のまわりに正方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、前方下側に一定角度以上傾くと、スイッチSWBがオンになる。
【0044】
チルトセンサ46(基板44)が前方上側に傾いた状態では、チルトセンサ46(基板44)がx軸のまわりに負方向に回転した状態である。このように、チルトセンサ46(基板44)が水平面に対して、前方上側に一定角度以上傾くと、スイッチSWUがオンになる。
【0045】
プロセッサ48は、以上のようなチルトセンサ46からの信号を受けて、つまり、入出力ポートIO3〜IO6の値を傾きフラグとして、ゲーム機1の傾きを判定して、その傾きに応じて、被操作オブジェクト88(後述の図8参照)を変化させる。また、プロセッサ48は、アクセルスイッチ25からオン信号を受けると、被操作オブジェクト88を加速させる。さらに、プロセッサ48は、右ブレーキスイッチ54及び/又は左ブレーキスイッチ52からオン信号を受けると、被操作オブジェクト88を減速させる。さらに、プロセッサ48は、ポーズスイッチ27からオン信号を受けると、画面を停止させる。
【0046】
図示は省略しているが、プロセッサ48の内部構成を簡単に説明する。プロセッサ48は、CPU(central processing unit)、グラフィックスプロセッサ、サウンドプロセッサおよびDMAコントローラ等の各種機能ブロックを含むとともに、アナログ信号を取り込むときに用いられるA/Dコンバータや、外部の電子回路や電子部品等から入力信号を受け、かつ出力信号をそれらに与える入出力制御回路を含む。上記の入出力ポートIO0〜IO6は、この入出力制御回路に接続される。
【0047】
CPUは、ROM50に格納されたゲームプログラムを実行し、各種演算を行う。グラフィックスプロセッサやサウンドプロセッサは、CPUによる演算結果に従って、ROM50に格納された画像データや音声データを読み込んで、ビデオ信号やオーディオ信号を生成し、A/Vケーブル9に出力する。
【0048】
さらに、プロセッサ48には、図示しないが内部メモリが設けられ、この内部メモリは、例えば、RAM(random access memory)により構成される。内部メモリは、ワーキング領域、カウンタ領域、レジスタ領域、テンポラリデータ領域、及び/又はフラグ領域等として利用される。
【0049】
図6は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(レース/スタント)の例示図である。図6に示すように、この画面は、レースモードに入るためのレース選択オブジェクト94、スタントモードに入るためのスタント選択オブジェクト96、及びゲーム機1の操作をガイドする操作ガイド92を含む。
【0050】
レースモードは、選択したコースのタイムを競うゲームモードである。スタントモードは、選択したコースでのアクションを競うゲームモードである。操作ガイド92は、ゲーム機1を前方上側に傾けることを示す表示(矢印が上向き)と、ゲーム機1を前方下側に傾けることを示す表示(矢印が下向き)と、を交互に繰り返す。
【0051】
ゲーム機1を前方上側に傾けると、スイッチSWUがオンになって、プロセッサ48は、レース選択オブジェクト94を選択状態にし、ゲーム機1を前方下側に傾けると、スイッチSWBがオンになって、プロセッサ48は、スタント選択オブジェクト96を選択状態にする。そして、プロセッサ48は、アクセルスイッチ25がオンになると、選択を確定する。
【0052】
図7は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(ステージA/B/C)の例示図である。図7に示すように、この画面は、ゲームステージを選択するためのステージ選択オブジェクト98,99及び100、並びにゲーム機1の操作をガイドする操作ガイド92を含む。
【0053】
操作ガイド92は、ゲーム機1を左側に傾けることを示す表示(矢印が左向き)と、ゲーム機1を右側に傾けることを示す表示(矢印が右向き)と、を交互に繰り返す。
【0054】
ゲーム機1を左側に傾け(スイッチSWLがオン)、再び水平に戻す動作(スイッチSWL,SWR,SWU及びSWBが全てオフ)を繰り返すことにより、このような動作を検知したプロセッサ48は、ステージ選択オブジェクト99→98→100→99というように選択状態を巡回的に変化させる。一方、ゲーム機1を右側に傾け(スイッチSWRがオン)、再び水平に戻す動作スイッチSWL,SWR,SWU及びSWBが全てオフ)を繰り返すことにより、このような動作を検知したプロセッサ48は、ステージ選択オブジェクト99→100→98→99というように選択状態を巡回的に変化させる。そして、プロセッサ48は、アクセルスイッチ25がオンになると、選択を確定する。
【0055】
図8は、図1のテレビジョンモニタ7に表示されるゲーム画面の例示図である。このゲーム画面は、スタントモードのものであり、タイム表示部80、ポイント表示部82、エンジン回転数表示部84、コースマップ85、背景90、及び被操作オブジェクト88を含む。
【0056】
本実施の形態では、モトクロスゲームを例に挙げているので、被操作オブジェクト88は、モトクロスバイクに乗ったライダーを表している。タイム表示部80は、画面中の仮想空間における被操作オブジェクト88のスタートから現在までの経過時間を表示する。ポイント表示部82は、被操作オブジェクト88が行うアクションに応じて加算されるポイントを表示する。エンジン回転数表示部84は、被操作オブジェクト88であるモトクロスバイクの仮想上のエンジンの回転数を表示する。コースマップ85は、マップ上のコースに被操作オブジェクト88の現在位置を表示する。
【0057】
プロセッサ48は、チルトセンサ46からの入力、つまり、ゲーム機1の傾きに応じて、被操作オブジェクト88を変化させる。例えば、プロセッサ48は、ゲーム機1が前方下側に傾いたと判断すると、モトクロスバイクが前のめりになるような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が前方上側に傾いたと判断すると、モトクロスバイクのフロントが上がるような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が右側に傾いたと判断すると、モトクロスバイクの方向が右斜めを向くような被操作オブジェクト88を表示する。例えば、プロセッサ48は、ゲーム機1が左側に傾いたと判断すると、モトクロスバイクが左斜めを向くような被操作オブジェクト88を表示する。
【0058】
このように、プレイヤ11は、左グリップ13及び右グリップ15を握って、ゲーム機1自体を空中で所望の向きに傾けることで、被操作オブジェクト88を操作できる。
【0059】
また、プロセッサ48は、アクセルスイッチ25がオンになると、背景90の移り変わりを速くして、あたかも被操作オブジェクト88が加速したような演出を行うとともに、エンジン回転数表示部84が示す回転数を増加させる。さらに、プロセッサ48は、右ブレーキスイッチ54及び/又は左ブレーキスイッチ52がオンになると、背景90の移り変わりを遅くして、あたかも被操作オブジェクト88が減速したような演出を行うとともに、エンジン回転数表示部84が示す回転数を減少させる。
【0060】
このように、プレイヤ11は、ゲーム機1のアクセルスイッチ25並びに右ブレーキスイッチ54及び左ブレーキスイッチ52のオン/オフをコントロールすることにより、被操作オブジェクト88のスピードをコントロールできる。
【0061】
以上のように、プレイヤ11は、左グリップ13及び右グリップ15を握って、ゲーム機1自体の傾きを変えたり、スイッチ25,52及び54のオン/オフを制御することにより、あたかもモトクロスバイクを運転しているのと同様の動作により、被操作オブジェクト88を操作できる。
【0062】
なお、プロセッサ48は、特定のシーンとゲーム機1の特定の傾きとの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、あるシーンのときに、ゲーム機1が左側に傾いたと判断した場合に、プロセッサ48は、被操作オブジェクト88に特定の動作をさせる。また、プロセッサ48は、ゲーム機1の特定の複数の傾きの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、この傾きの組み合わせの通り、ゲーム機1が左側、右側、及び前方上側という順番で傾いたと判断した場合に、プロセッサ48は、被操作オブジェクト88に特定の動作をさせる。さらに、プロセッサ48は、ゲーム機1の特定の複数の傾きの組み合わせと特定のシーンとの組み合わせにより、被操作オブジェクト88に特定の動作をさせることができる。例えば、あるシーンのときに、この傾きの組み合わせの通り、ゲーム機1が左側、右側、及び前方上側という順番で傾いたと判断した場合に、プロセッサ48は被操作オブジェクト88に特定の動作をさせる。
【0063】
図9は、図5のプロセッサ48によるゲーム処理の流れの一例を示すフローチャートである。図9に示すように、ステップS1にて、プロセッサ48は、システムの初期設定を実行する。ステップS2にて、プロセッサ48は、入出力ポートIO0〜IO2をチェックして、スイッチ25,27,52及び54のオン/オフ情報を取得する。ステップS3にて、プロセッサ48は、入出力ポートIO3〜IO6をチェックして、チルトセンサ46からの4ビットの入力データ「****」を取得する。プロセッサ48は、取得したデータ「****」を傾きフラグの値として内部メモリにセットする。上記のように、プロセッサ48は、傾きフラグが「0000」のときは「傾きなし」、「0010」のときは「右方向への傾き」、「0001」のときは「前方下側への傾き」、「0100」のときは「左方向への傾き」、「1000」のときは「前方上側への傾き」と判断する。
【0064】
ステップS4では、プロセッサ48は、現在のステートに応じて、ステップS5及びS11のいずれかに進む。ただし、最初のステートは、ゲームモードを選択するためのステートであり、プロセッサ48は、ステップS11に進んで、ゲームモードを選択するための処理を実行する(図6及び図7参照)。
【0065】
ステートがゲーム中の場合、プロセッサ48は、ステップS5に進む。ステップS5にて、プロセッサ48は、傾きフラグを参照して、ゲーム機1の傾きに応じた形態の被操作オブジェクト88を設定する。
【0066】
ステップS6にて、プロセッサ48は、タイム表示部80へのタイム表示のために、スタートからの経過時間を算出する。ステップS7にて、プロセッサ48は、ポイント表示部82へのポイント表示のために、被操作オブジェクト88の動作に応じて、ポイントを算出する。ステップS8にて、プロセッサ48は、アクセルスイッチ25並びにブレーキスイッチ52及び54のオン/オフ情報を参照して、仮想のエンジン回転数を算出する。ステップS9にて、プロセッサ48は、コースマップ85に被操作オブジェクト88の現在位置を表示するために、マップ上の現在位置を算出する。ステップS10にて、プロセッサ48は、アクセルスイッチ25並びにブレーキスイッチ52及び54のオン/オフ情報を参照して、それらに応じて、背景90の移り変わりの速度を算出する。
【0067】
ステップS12では、プロセッサ48は、ビデオ同期信号による割り込みが発生したときは(例えば、1/60秒ごと)、ステップS13に進み、ビデオ信号を新たに生成して表示画像を更新し、割り込み待ちの状態であれば、同じステップS12に進む。ステップS13では、プロセッサ48は、ステップS5〜S11の処理結果に応じて、テレビジョンモニタ7に表示される画像(ビデオフレーム)の更新処理を実行する。
【0068】
ステップS14の音声処理は、音声割り込みが発生したときに実行され、それによって、プロセッサ48は、オーディオ信号を生成して、音楽や効果音を出力する。
【0069】
さて、以上のように、本実施の形態によれば、ゲーム機1自体を空中で動かして、その傾きを検出するので、ゲーム機1自体の傾きを利用したゲームプログラムを作成できる。従って、プレイヤは、ダイナミックな操作を行いながらゲームを楽しむことができる。
【0070】
また、本実施の形態では、ゲーム機1は、CPU、グラフィックスプロセッサ、及びサウンドプロセッサ等を内蔵するプロセッサ48を備えているので、ゲーム機1をテレビジョンモニタ7に接続するだけで、ゲームを行うことができる。
【0071】
さらに、本実施の形態では、電池を左グリップ13及び右グリップ15の内部にセットするので、スペースを効率良く利用できるため、ゲーム機1の大きさを最適化できる。最適化とは、プレイヤ11が空中でゲーム機1を動かすのに適した大きさのことである。
【0072】
なお、本発明は、上記の実施の形態に限られるものではなく、その要旨を逸脱しない範囲で種々の態様において実施することが可能であり、例えば、以下のような変形も可能である。
【0073】
(1)上記では、モトクロスゲームを例に挙げ、ゲーム機1の外観を、バイクのハンドルを模したものとしたが、ゲーム機1の外観はこれに限定されない。もちろん、ゲームの内容もモトクロスゲームに限定されない。
【0074】
(2)上記では、傾き検出のためのセンサとして、チルトセンサ46を例に挙げたが、他の周知の方法及びセンサで傾きを検出してもよい。
【0075】
(3)上記では、ゲーム機1は、プレイヤが操作するコントローラとしての機能も有していた。しかし、プロセッサ48やROM50等のゲームを行うのに必要なデータ処理やAV信号の生成を受け持つ部分をゲーム機本体として別個に設け、チルトセンサ46等のコントローラとしての機能を担う部分のみを図2のゲーム機1に残すこともできる。つまり、図2のゲーム機1をコントローラとしてのみ使用することもできる。
【0076】
(4)上記では、チルトセンサ46は、オン/オフのデジタル出力を行うものであった。ただし、xyzの座標軸ごとに、傾きに応じたアナログ出力を行うものであってもよい(2軸又は3軸加速度センサ)。この場合は、プロセッサ48は、座標軸ごとの傾きの度合いに応じて、被操作オブジェクト88を変化させることができる。従って、プレイヤは、より緻密に被操作オブジェクト88を操作できる。また、チルトセンサ46と共に、ジャイロセンサ(1軸〜3軸角速度センサ)を搭載することもできる。この場合は、プロセッサ48は、ジャイロセンサからの角速度信号をも、被操作オブジェクト88の動きに反映できる。なお、チルトセンサ46に代えて、ジャイロセンサ(1軸〜3軸軸角速度センサ)を搭載することもできる。
【図面の簡単な説明】
【0077】
【図1】図1は、本発明の実施の形態によるゲームシステムの全体構成を示すブロック図である。
【図2】図2は、図1のゲーム機1の斜視図である。
【図3】図3は、図2のゲーム機1の内部構成を示す図解図である。
【図4】図4は、図3の右レバー21及びその周辺部の拡大図である。
【図5】図5は、図2のゲーム機1の電気的構成を示す図である。
【図6】図6は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(レース/スタント)の例示図である。
【図7】図7は、図1のテレビジョンモニタ7に表示されるゲームモード選択画面(ステージA/B/C)の例示図である。
【図8】図8は、図1のテレビジョンモニタ7に表示されるゲーム画面の例示図である。
【図9】図9は、図5のプロセッサ48によるゲーム処理の流れの一例を示すフローチャートである。
【図10】図10は、図5のチルトセンサ46の説明のための三次元座標系の説明図である。
【符号の説明】
【0078】
1…ゲーム機、7…テレビジョンモニタ、13…左グリップ、15…右グリップ、17…回路収納体、46…チルトセンサ、48…プロセッサ、50…ROM。
【特許請求の範囲】
【請求項1】
空中で動かされるゲーム装置であって、
前記ゲーム装置の傾きを検出する傾き検出手段と、
前記傾き検出手段が内部に配置される収納体と、
プレイヤの一方の手で把持される円筒状の第1のグリップ部と、
前記プレイヤの他方の手で把持される円筒状の第2のグリップ部と、を備え、
前記第1のグリップ部及び前記第2のグリップ部は、各々前記収納体の両側に配置される、ゲーム装置。
【請求項2】
前記傾き検出手段が検出した前記ゲーム装置の傾きに応じて、表示装置に表示する被操作オブジェクトを変化させるプロセッサをさらに備え、
前記プロセッサは、前記収納体の内部に配置される、請求項1記載のゲーム装置。
【請求項3】
前記第1のグリップ部及び前記第2のグリップ部の少なくとも一方の内部に、電池をセットする電池ボックスが設けられる、請求項1又は2記載のゲーム装置。
【請求項4】
前記傾き検出手段は、それぞれ、左側、右側、前方下側及び前方上側への前記ゲーム装置の傾きを検出する4つのスイッチからなる、請求項1から3記載のゲーム装置。
【請求項5】
表示装置に表示するための映像を生成する情報処理装置に制御信号を与え、かつ、空中で動かされるコントローラであって、
前記コントローラの傾きを検出して、その傾きを表す信号を前記制御信号として、前記情報処理装置に与える傾き検出手段と、
前記傾き検出手段が内部に配置される収納体と、
前記収納体に取り付けられ、あるいは、前記収納体の一部として構成される、プレイヤの手で把持されるグリップ部と、を備える、コントローラ。
【請求項1】
空中で動かされるゲーム装置であって、
前記ゲーム装置の傾きを検出する傾き検出手段と、
前記傾き検出手段が内部に配置される収納体と、
プレイヤの一方の手で把持される円筒状の第1のグリップ部と、
前記プレイヤの他方の手で把持される円筒状の第2のグリップ部と、を備え、
前記第1のグリップ部及び前記第2のグリップ部は、各々前記収納体の両側に配置される、ゲーム装置。
【請求項2】
前記傾き検出手段が検出した前記ゲーム装置の傾きに応じて、表示装置に表示する被操作オブジェクトを変化させるプロセッサをさらに備え、
前記プロセッサは、前記収納体の内部に配置される、請求項1記載のゲーム装置。
【請求項3】
前記第1のグリップ部及び前記第2のグリップ部の少なくとも一方の内部に、電池をセットする電池ボックスが設けられる、請求項1又は2記載のゲーム装置。
【請求項4】
前記傾き検出手段は、それぞれ、左側、右側、前方下側及び前方上側への前記ゲーム装置の傾きを検出する4つのスイッチからなる、請求項1から3記載のゲーム装置。
【請求項5】
表示装置に表示するための映像を生成する情報処理装置に制御信号を与え、かつ、空中で動かされるコントローラであって、
前記コントローラの傾きを検出して、その傾きを表す信号を前記制御信号として、前記情報処理装置に与える傾き検出手段と、
前記傾き検出手段が内部に配置される収納体と、
前記収納体に取り付けられ、あるいは、前記収納体の一部として構成される、プレイヤの手で把持されるグリップ部と、を備える、コントローラ。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−255400(P2006−255400A)
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願番号】特願2006−34998(P2006−34998)
【出願日】平成18年2月13日(2006.2.13)
【出願人】(396025861)新世代株式会社 (138)
【Fターム(参考)】
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願日】平成18年2月13日(2006.2.13)
【出願人】(396025861)新世代株式会社 (138)
【Fターム(参考)】
[ Back to top ]