
ゲーム装置
【課題】 景品が載置されるフィールドの高さをゲーム中に変動させることで変化のあるゲームを実現する。
【解決手段】 クレーンゲーム装置は、ゲーム処理が開始されると、クレーンアーム(キャッチャー)の動きを制御するための指示を入力可能な期間に、上下機構を駆動して景品が載置されるフィールドを上下動させる。
【解決手段】 クレーンゲーム装置は、ゲーム処理が開始されると、クレーンアーム(キャッチャー)の動きを制御するための指示を入力可能な期間に、上下機構を駆動して景品が載置されるフィールドを上下動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フィールドに景品等の物品が載置されるクレーンゲーム装置等のゲーム装置に関する。
【背景技術】
【0002】
クレーンゲーム装置等のゲーム装置では、フィールド内に複数の景品が載置される。プレーヤは、ボタンなどを操作することによりクレーンアームの動きを制御して、景品が載置された位置まで移動させた後、景品を掴む、倒す、引き摺るといった動作をさせて景品を景品落とし口まで導くことにより、景品を獲得することができる。
【0003】
従来では、プレーヤのゲームへの挑戦意欲を向上させるために、景品が載置されるゲームフィールドの形態を変形できる構成が考えられている。例えば、特許文献1に記載されたクレーンゲーム機では、景品載置面(ゲームフィールド)の高さや傾斜角度を、電動等の昇降装置により変更可能にする機構が設けられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−201952号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術では、景品載置面(ゲームフィールド)の高さ等を電動等の昇降装置により変更することで、景品載置面に載置された景品の姿勢を変化させてキャッチャーにより景品を掴みやすくしている。しかしながら、従来技術では、キャッチャーの操作を開始する前、すなわちゲームを開始する前に景品載置面の高さを変動させるだけで、ゲーム開始後は通常のゲームと変わらなかった。
【0006】
本発明は前述した事情に考慮してなされたもので、その目的は、景品が載置されるフィールドの高さをゲーム中に変動させることで変化のあるゲームを実現できるゲーム装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、景品が載置されるフィールドと、前記フィールドを上下動させる上下機構と、前記景品を把持する機構を有する把持手段と、前記把持手段の動きを制御するための指示を入力する第1の入力手段と、前記第1の入力手段による入力が可能な期間に、前記上下機構により前記フィールドを上下動させる制御手段とを具備したことを特徴とする。
【発明の効果】
【0008】
本発明によれば、景品が載置されるフィールドの高さをゲーム中に変動させることで変化のあるゲームを実現できる。
【図面の簡単な説明】
【0009】
【図1】本実施形態におけるゲーム装置の外観構成を示す斜視図。
【図2】本実施形態におけるゲーム装置の正面図。
【図3】本実施形態におけるクレーンゲーム装置10の右側ユニット10R側から見た側面図。
【図4】クレーンゲーム装置10の筐体内部の詳細な構成を示すために上部筐体12を取り除いて示す図。
【図5】左側ユニット10Lに実装される上下機構の構成の詳細を示す図。
【図6】左側ユニット10Lに実装される上下機構の構成の詳細を示す図。
【図7】駆動ユニット30Lの詳細な構成を示す図。
【図8】図7中に示す範囲Aの駆動部の詳細な構成を示す斜視図。
【図9】図8に示す駆動部のフィールドモータ45の出力軸方向から見た図。
【図10】図7に示すスライドユニット31Lh,33Lhの内部構成を示す図。
【図11】図7に示すスライドユニット31Lh,33Lhの内部構成を示す図。
【図12】図11中に示す範囲Bの詳細な構成を示す斜視図。
【図13】図12に示すA−A線における断面図。
【図14】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
【図15】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
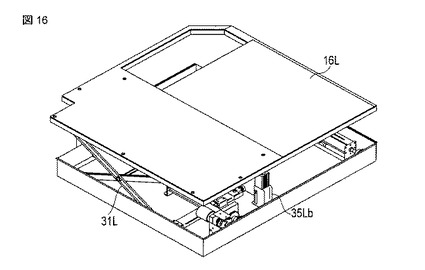
【図16】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
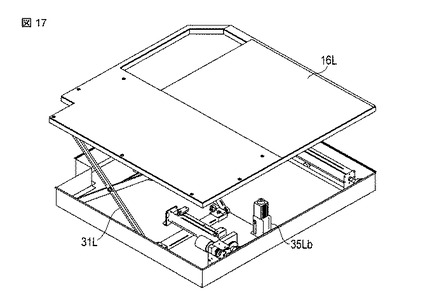
【図17】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
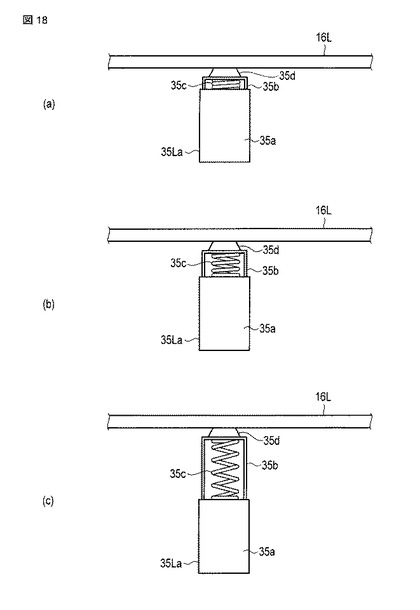
【図18】景品フィールド16Lが最下位置(初期位置)から押し上げられる時の補助スプリングユニット35Laの変化を示す図。
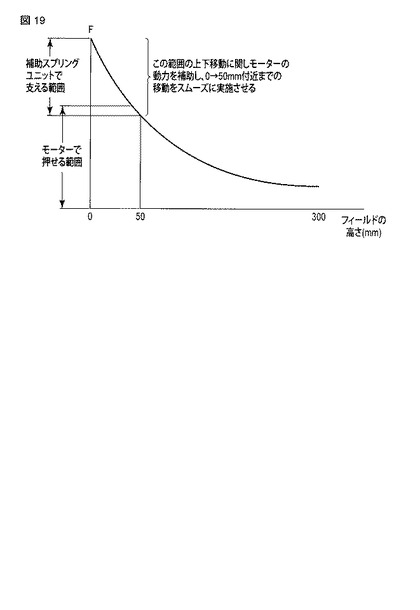
【図19】補助スプリングユニット35La,35Lbとフィールドモータ45による景品フィールド16Lを上下動させる力関係を示す図。
【図20】本実施形態におけるクレーンゲーム装置10の機能構成を示すブロック図。
【図21】上下機構に対する各種設定をするためのフィールド設定処理について示すフローチャート。
【図22】高さ設定用の画面の表示例を示す図。
【図23】デモ設定用の画面の表示例を示す図。
【図24】ゲーム設定用の画面の表示例を示す図。
【図25】プレーヤの操作により実行されるゲーム処理について示すフローチャート。
【図26】プレーヤの操作により実行されるゲーム処理について示すフローチャート。
【図27】ゲーム中にプレーヤの操作によって景品フィールド16Lの高さを調整できる動作モード「フリー2」のフローチャート。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態について説明する。
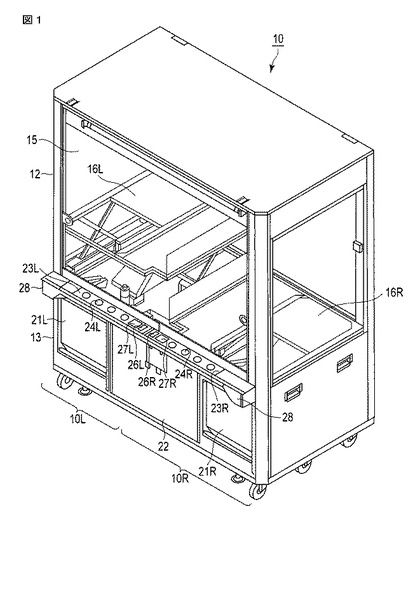
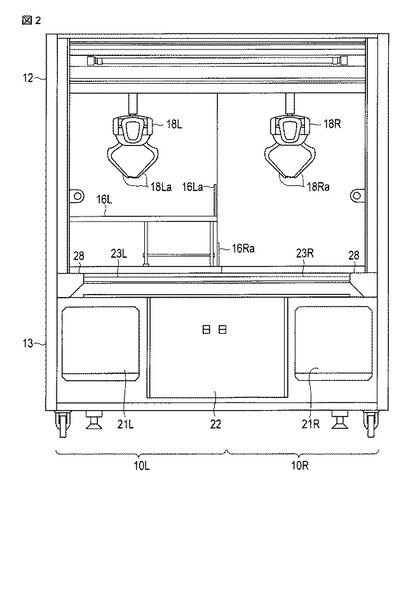
図1は、本実施形態におけるゲーム装置の外観構成を示す斜視図、図2は、本実施形態におけるゲーム装置の正面図である。本実施形態のゲーム装置として、プレーヤの操作に応じてクレーンアームを制御して、景品を払い出すように動作するクレーンゲーム装置10を例に示す。
【0011】
図1及び図2に示すクレーンゲーム装置10は、上部筐体12と下部筐体13とから構成されている。上部筐体12は、前面と側面の一部がアクリル板などの透明板15(開閉部材)により覆われており、透明板15を通じて筐体内部の景品フィールド16L,16Rが視認できるようになっている。透明板15は、例えば正面側が開閉可能に構成されており、景品フィールド16L,16Rへの景品の入れ替えや補充、景品フィールド16L,16Rの高さを調整する場合等に開放することができる。
【0012】
本実施形態におけるクレーンゲーム装置10は、同時に2人のプレーヤがゲームを実施することができるように、2つのゲームユニット(左側ユニット10L、右側ユニット10R)が搭載されている。左側ユニット10Lと右側ユニット10Rとは、基本的に、中央の境界線において左右対称に構成されているものとする。2つのゲームユニットの景品フィールド16L,16Rは、仕切板(図示せず)によって区分されている。仕切板により区分された2つの景品フィールド16L,16Rには、それぞれ景品を積載することができる。
【0013】
本実施形態におけるクレーンゲーム装置10では、景品フィールド16L,16Rのそれぞれについて、個別に高さを変更することができる上下機構(詳細については後述する)が設けられている。図1及び図2において、右側ユニット10Rは、最下位置(初期位置)に景品フィールド16Rが設定され、左側ユニット10Lは、初期位置より高い位置に景品フィールド16Lが設定されている状態を示している。
【0014】
また、景品フィールド16L,16Rは、例えば景品落とし口が形成されたパネルをフレームに脱着可能となっており、異なる種類のパネルに交換することにより景品落とし口の大きさ、形状等を変更することができる。例えば、図1に示す例では、景品フィールド16Lの左側半分と景品フィールド16Rの右側半分のそれぞれの位置にパネルを装着することができる。パネルには、例えば1つ、または複数の景品落とし口が形成される。パネルの種類によって、それぞれに形成された景品落とし口の形状が異なっている。景品落とし口以外の部分は、景品を載置することができる平面部となる。なお、景品フィールド16Lの右側半分、景品フィールド16Rの左側半分については平面部材が固定されているものとする。図1に示す例では、景品フィールド16Lには、左手前側に景品落とし口が形成されたパネルが装着された例を示している。また、景品フィールド16Rには、右手前側に景品落とし口が形成されたパネルが装着された例を示している。
【0015】
景品フィールド16Lの左側半分(パネル装着範囲)の下方部と景品フィールド16Rの右側半分(パネル装着範囲)の下方部のそれぞれには、景品フィールド16L,16Rから落下した景品を、下部筐体13の前面側に設けられた景品取出口21L,21Rに誘導するための景品誘導空間が設けられている。また、景品誘導空間には、奥側を高く、手前側を低くした傾斜面を設けている。傾斜面を設けることにより、景品落とし口から落下した景品が傾斜面に衝突し、景品取出口21L,21Rが設けられた下部筐体13の前面側に落下し易くなる。これにより、景品取出口21L,21Rから景品を取りやすくなる。なお、傾斜面は、景品誘導空間内の高い位置と低い位置に設けることができる。
【0016】
例えば、景品フィールド16L,16Rから落下した景品が景品誘導空間の奥に転がっていっても、低い位置にも傾斜面を設けることで、景品を景品取出口21L,21Rから取り出しやすい開口部側に戻ってくるようにしている。特に、低い位置の傾斜面と景品誘導空間の底部(水平面)とをR形状(曲線形状)で繋ぐことにより、奥に転がった景品を滑らかに手前側に転がるようにようにできる。また、高い位置の傾斜面を例えば透明なアクリル板などにより形成して上部から景品誘導空間内を確認できるようにしている。アクリル板は、脱着可能な構成とすることで、景品の落下などで傷ついたような場合に交換することができる。また、景品フィールド16L,16Rに載置された景品のサイズが比較的大きい場合には、高い位置の傾斜面のアクリル板を取り外して低い位置の傾斜面に景品が落下するようにしても良い。これにより、サイズの大きい景品についても、景品取出口21L,21Rの開口部近くにまで転がり出るようにできる。
【0017】
なお、左右の景品フィールド16L,16Rの上方には、プレーヤ操作に応じて動作が制御されるクレーンアーム(キャッチャー)18L,18Rが装着されている(図2参照。図1では景品フィールド16L,16Rを見やすくするために図示を省略している)。上部筐体12内の景品フィールド16L,16Rの上方には、それぞれクレーンアーム18L,18Rを、例えばX軸方向、Y軸方向、及びZ軸方向(上下方向)に移動させるためのクレーン機構部(図示せず)が設けられている。クレーン機構部は、例えば、コンパネ部23L,23Rに設けられた複数のボタン24L,24R(例えば、横移動ボタン、縦移動ボタン、降下ボタン、高さ調整ボタン)へのプレーヤ操作に応じて制御される。なお、コンパネ部23L,23Rには、ボタンだけでなく、プレーヤにより上下左右の方向を指示できるジョイスティックなどの入力デバイスを設けた構成としても良い。
【0018】
クレーンアーム18L,18Rの先端部には、景品を把持するための2本のアーム18La,18Ra(把持爪)が設けられている(なお、3本あるいは4本のアームを設けても良い)。アーム18La,18Raは、クレーンアーム18が下降されて景品に到達した位置で、閉じる(物を把持する)ように動作が制御される。
【0019】
また、上部筐体12の奥面には、景品ディスプレイ用のネットや景品を引っかけることができるフックを取り付け可能にしている。ネットやフックは、例えば奥面上部において水平方向に配設されたレールに取り付けられるようにして、レールに沿って左右方向に移動可能にする。ネットやフックを利用して景品を展示することで、ユーザにクレーンゲーム装置10の利用をアピールすることができる。
【0020】
下部筐体13の正面側には、景品取出口21L,21R、フロントメンテドア22、プレーヤによって操作が行われるコンパネ(コントロールパネル)部23L,23Rが設けられている。
景品取出口21L,21Rは、筐体内(景品フィールド)から景品を外部に取り出すためのもので、景品フィールド16L,16Rの下方部に設けられた景品誘導空間と連通している。クレーンアーム18L,18Rを操作して景品を景品落とし口に落下させることにより、景品取出口21L,21Rから景品を取り出すことができる。
【0021】
フロントメンテドア22は、下部筐体13の内部に収容された制御ユニット(制御PCB(Print Circuit Board))やその他の機構部に対して作業をするような場合に、管理者によって開放させることができる(鍵付き)。また、フロントメンテドア22の内部には、収納スペースが設けられており、補充用の景品などを収容しておくことができる。
【0022】
コンパネ部23L,23Rには、クレーンアーム18L,18Rを動作させるためにプレーヤにより操作される複数のボタン24L,24Rの他、コインが投入されるコイン投入口26L,26R、プレイ料金や投入されたコインに応じた残りプレイ回数を表示するための表示装置27L,27R(例えば7セグ表示器)等が設けられている。また、ゲーム実行中の効果音や音楽、メッセージ音声などを出力するためのスピーカ28が設けられている。
【0023】
また、本実施形態におけるクレーンゲーム装置10には、管理者がクレーンゲーム装置10に対して各種設定をするための設定機器(図20に示す設定機器29)が設けられている。設定機器は、クレーンゲーム装置10の本体筐体から着脱可能な可搬型に構成されている。設定機器は、各種設定のための操作をする場合には、収納部から取り出して、クレーンゲーム装置10と近接した位置で手に保持した状態で取り扱うことができる。設定機器は、クレーンゲーム装置10の筐体内に収納された制御ユニットと、例えばケーブルや無線通信(無線LAN(Local Area Network)など)によって接続される。設定機器は、左側ユニット10Lと右側ユニット10Rのそれぞれに対する各種設定を個別にすることができるものとする。
【0024】
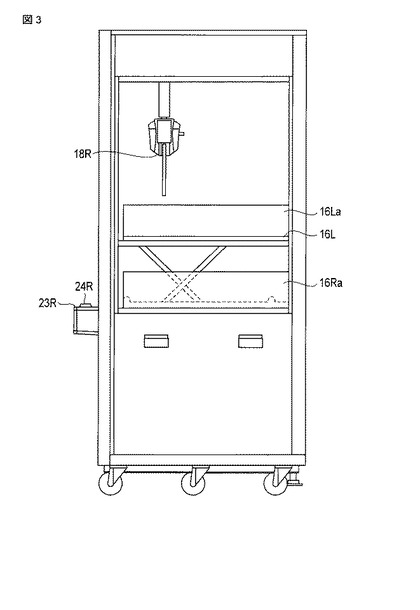
図3は、本実施形態におけるクレーンゲーム装置10の右側ユニット10R側から見た側面図である。
図3に示すように、景品フィールド16Lは、上下機構によって、景品フィールド16Rよりも高い位置に設定されている。景品フィールド16L,16Rは、上下機構により個別に高さを調整できるため、異なる高さに設定された場合であっても、フィールド上に載置された景品が落下しないようにするためのガード板16La,16Raが、景品フィールド16L,16Rのそれぞれの端部にほぼ垂直に装着されている。
【0025】
図2や図3に示すように、景品フィールド16L,16Rの高さを変えることにより、景品フィールド16L,16Rとクレーンアーム18L,18Rとの距離が変化するため、景品フィールド16L,16Rの高さに応じて景品フィールド16L,16Rに対するZ軸方向(上下方向)の駆動制御が実行される。
【0026】
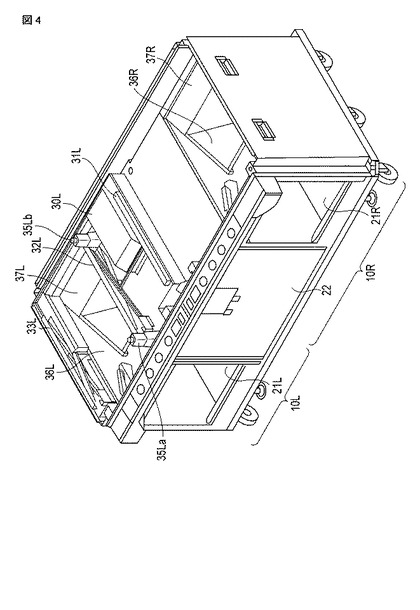
図4は、クレーンゲーム装置10の筐体内部の詳細な構成を示すために上部筐体12を取り除いて示す図である。
図4において、左側ユニット10Lは上下機構が装着された状態の構成を示し、右側ユニット10Rは上下機構を除いた状態の構成を示している。なお、右側ユニット10Rには、左側ユニット10Lに装着された上下機構と左右対称の位置に各部材が配置された上下機構が装着されるものとして詳細な説明を省略する。
【0027】
左側ユニット10Lに設けられた上下機構には、景品フィールド16Lを下部から支持すると共に景品フィールド16Lの高さを変更させる部材として3つのX部材31L,32L,33Lが、所定の間隔で長手方向が平行となるように配置されている。X部材31L,33Lは、左側ユニット10Lの左右端近傍に配置され、X部材32Lは、左側ユニット10Lのほぼ中央に配置されている。
【0028】
X部材31L,32Lが配設された間には、X部材31L,32L,33Lにより景品フィールド16Lを上下動させる駆動ユニット30Lが配置されている。X部材32L,33Lが配置された間には、景品誘導空間36Lが設けられており、景品フィールド16Lに形成された景品落とし口から落下された景品が、景品取出口21Lまで通過可能となっている。景品誘導空間36Lには、景品フィールド16Lから落下された景品が衝突するように、クレーンゲーム装置10の前面側に傾斜した傾斜面37Lが形成されている。傾斜面37Lは、例えば透明のアクリル板が脱着可能となっており、景品の落下などで傷ついたような場合に交換することができる。
【0029】
右側ユニット10Rにおいても、左側ユニット10Lと同様にして、景品誘導空間36Rに傾斜面37Rが設けられている。
【0030】
また、X部材32Lの近傍には、駆動ユニット30Lによる景品フィールド16Lの押し上げを補助するための補助スプリングユニット35La,35Lbが設けられている。補助スプリングユニット35La,35Lbは、景品フィールド16Lが最下位置近くにある時に、景品フィールド16Lの底部を支持すると共に、スプリングによる反発力により景品フィールド16Lを上方向へ押し上げるように作用する。補助スプリングユニット35Laは、クレーンゲーム装置10の前側に配置され、補助スプリングユニット35Lbは、クレーンゲーム装置10の後側に配置されている。なお、補助スプリングユニット35La,35Lbの作用効果の詳細については、図13〜図18を参照しながら説明する。
【0031】
なお、本実施形態のクレーンゲーム装置10では、左側ユニット10Lにおいて2つの補助スプリングユニット35La,35Lbが設けられているが、1つの補助スプリングユニットのみとしても良いし、3つ以上の補助スプリングユニットを設ける構成としても良い。補助スプリングユニットの個々の強さや個数は、駆動ユニット30Lによる景品フィールド16Lを押し上げる性能に応じて決定されるものとする。
【0032】
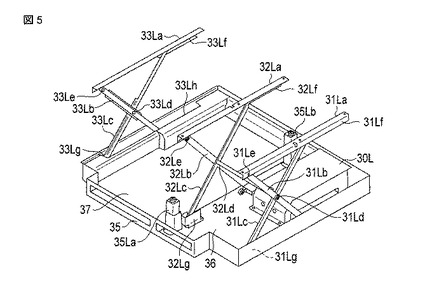
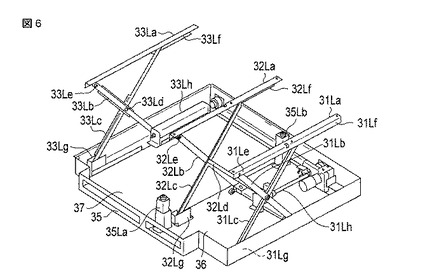
図5及び図6は、左側ユニット10Lに実装される上下機構の構成の詳細を示す図である。図6は、図5中に示す駆動ユニット30Lのカバーを取り外して、駆動ユニット30Lの内部構造を示している。図5及び図6に示すように、上下機構は、各ユニットが基台上に取り付けられている。
【0033】
X部材31Lは、水平部材31La、2本の斜め部材31Lb,31Lcにより構成されている。水平部材31Laは、景品フィールド16Lの底部に取り付けられる。斜め部材31Lb,31Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸31Ldにより連結され、回動可能になっている。
【0034】
斜め部材31Lbの上端部は、水平部材31Laの一方の端部近傍に設けられた回転軸31Leにおいて回動可能となるように取り付けられている。斜め部材31Lcの上端部は、水平部材31Laの他方の端部側に取り付けられたスライド機構31Lfによって、水平部材31Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0035】
斜め部材31Lbの下端部は、図6に示すように、X部材32Lの斜め部材32Lbの下端部と連結され、駆動ユニット30Lによって水平方向に移動可能となっている(詳細については図7参照)。斜め部材31Lcの下端部は、基台上に設けられた回転軸31Lgにおいて回動可能となるように取り付けられている。
【0036】
X部材32Lは、水平部材32La、2本の斜め部材32Lb,32Lcにより構成されている。水平部材32Laは、景品フィールド16Lの底部に取り付けられる。斜め部材32Lb,32Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸32Ldにより連結され、回動可能になっている。
【0037】
斜め部材32Lbの上端部は、水平部材32Laの一方の端部近傍に設けられた回転軸32Leにおいて回動可能となるように取り付けられている。斜め部材32Lcの上端部は、水平部材32Laの他方の端部側に取り付けられたスライド機構によって、水平部材32Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0038】
斜め部材32Lbの下端部は、図6に示すように、X部材31Lの斜め部材31Lbの下端部と連結され、駆動ユニット30Lによって水平方向に移動可能となっている(詳細については図7参照)。斜め部材32Lcの下端部は、基台上に設けられた回転軸32Lgにおいて回動可能となるように取り付けられている。
【0039】
X部材31Lの斜め部材31LbとX部材32Lの斜め部材32Lbは下端部において連結されて、この下端部がスライドユニット31Lhによって同時に水平方向に移動される。
【0040】
X部材33Lは、水平部材33La、2本の斜め部材33Lb,33Lcにより構成されている。水平部材33Laは、景品フィールド16Lの底部に取り付けられる。斜め部材33Lb,33Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸33Ldにより連結され、回動可能になっている。
【0041】
斜め部材33Lbの上端部は、水平部材33Laの一方の端部近傍に設けられた回転軸33Leにおいて回動可能となるように取り付けられている。斜め部材33Lcの上端部は、水平部材33Laの他方の端部側に取り付けられたスライド機構によって、水平部材33Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0042】
斜め部材33Lbの下端部は、図6に示すように、スライドユニット33Lhによって水平方向に移動可能となっている。斜め部材33Lcの下端部は、基台上に設けられた回転軸33Lgにおいて回動可能となるように取り付けられている。スライドユニット33Lhは、スライドユニット31Lhと連動して、駆動ユニット30Lからの駆動力が伝達されて斜め部材33Lbの下端部を水平方向に移動させる。
【0043】
図5及び図6に示すように、X部材31Lは、斜め部材31Lbの上端部が回転軸31Leによって水平部材31Laの固定位置に取り付けられ、斜め部材31Lcの下端部が回転軸31Lgによって基台の固定位置に取り付けられている。斜め部材31Lcの上端部は、スライド機構31Lfによってスライド可能となっている。従って、斜め部材31Lbの下端部を駆動ユニット30L(スライドユニット31Lh)によって水平方向に移動させることにより、斜め部材31Lb,31Lcは、回転軸31Ldにおいて回動し、水平部材31Laを水平にしたまま上下動させることができる。X部材32Lは、X部材31Lと連結されているために水平部材31Laと連動して、水平部材32Laを上下動させる。また、スライドユニット33Lhとスライドユニット31Lhとが連動しているため、X部材33Lは、X部材31L,32Lと連動して水平部材33Laを水平にしたまま上下動させる。
【0044】
なお、図5及び図6に示すように、上下機構は、景品フィールド16Lの下部に全て収容されている。このため、景品フィールド16Lを広く使用することができる。また、景品フィールド16Lの上方に機構部がないことから見栄えも良く、景品フィールド16Lに景品を展示する際の妨げとならない。
【0045】
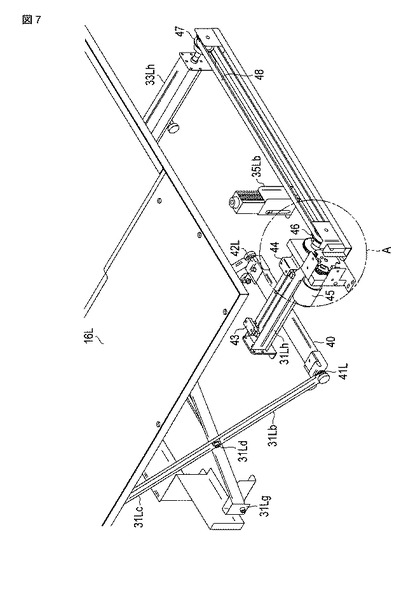
図7は、駆動ユニット30Lの詳細な構成を示す図である。図7では、駆動ユニット30Lを覆うカバーを取り外した状態を示している。
図7に示すように、X部材31Lの斜め部材31Lbとの下端部とX部材32Lの斜め部材32Lbとの下端部とは、連結部材40を介して連結されている。連結部材40の一端には、斜め部材31Lbの下端部が回転軸41Lによって回動可能に取り付けられ、連結部材40の他端には、斜め部材32Lbの下端部が回転軸42Lによって回動可能に取り付けられている。
【0046】
スライドユニット31Lhには、連結部材40に固定されたスライダブロック(図10、図11参照)が収容されている。連結部材40は、スライダブロックがスライドユニット31Lhの内部において、フィールドモータ45の駆動力により水平方向に移動させることにより、斜め部材31Lb,32Lbの下端部を水平方向に移動させる。なお、フィールドモータ45は、景品フィールド16Lを上下動させるための駆動力を供給するための駆動源である。
【0047】
スライドユニット31Lhの上部には、上部リミットセンサ43と下部リミットセンサ44とが両端部の近傍に設けられている。上部リミットセンサ43は、景品フィールド16Lの高さの上限を判別するためのセンサ、下部リミットセンサ44は、景品フィールド16Lの高さの下限を判別するためのセンサである。スライドユニット31Lhの上部には、長手方向に沿ってスリットが設けられており、スライドユニット31Lhに収容されたナット(後述する)に設けられた板部材が突出している。上部リミットセンサ43と下部リミットセンサ44は、この板部材の通過を検出する。なお、詳細については、図10〜図12を参照しながら説明する。フィールドモータ45は、上部リミットセンサ43あるいは下部リミットセンサ44により板部材の通過が検出されると動作が停止するように制御される。
【0048】
また、スライドユニット31Lhの側面に、長手方向に沿ってスリットが設けられており、スライドユニット31Lhに収容されたスライダブロック(後述する)に設けられた板部材が突出している。スライダブロックに設けられた板部材の通過は、下部リミットセンサ44の近傍に設けられたスライドセンサ(図示せず)により検出される。
【0049】
スライドユニット31Lhに収容された台形ネジシャフト(詳細については後述する)に取り付けられたプーリ46と、スライドユニット33Lhに収容された台形ネジシャフト(詳細については後述する)に取り付けられたプーリ47には、フィールドモータ45による駆動力を伝達するためのベルト48が架設されている。プーリ46は、フィールドモータ45の駆動によって回転される。従って、1つのフィールドモータ45の駆動によって、スライドユニット31Lh,33Lhを連動して動かして、景品フィールド16Lの上下動を調整することができる。
【0050】
本実施形態の上下機構では、スライドユニット31Lhにより連結部材40を水平方向に移動させ、X部材31L,32L,33Lを介して景品フィールド16Lを上下動させる構造となっている。このため上下機構がコンパクトになり、機構全体を景品フィールド16Lの下部に収納可能となっている。
【0051】
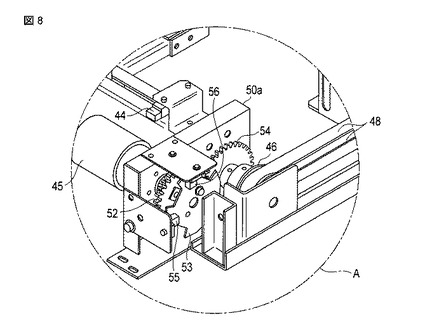
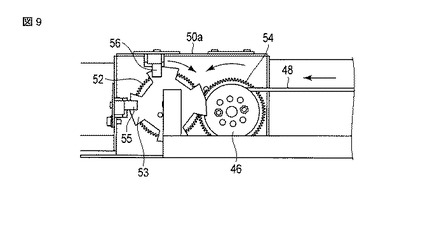
図8は、図7中に示す範囲Aの駆動部の詳細な構成を示す斜視図、図9は、図8に示す駆動部のフィールドモータ45の出力軸方向から見た図である。
図8に示すように、フィールドモータ45の出力軸は、支持部材50aによって軸支されている。フィールドモータ45の出力軸は、支持部材50aを貫通し、ギア52及びパルスカム53が取り付けられている。ギア52及びパルスカム53は、フィールドモータ45が駆動されることにより回転する。また、スライドユニット31Lhに収容された台形ネジシャフトの端部は、支持部材50aによって軸支されている。台形ネジシャフトの端部は、支持部材50aを貫通し、ギア54及びプーリ46が同軸に取り付けられている。図9に示すように、ギア52とギア54とは係合されており、フィールドモータ45が駆動されることによりギア52が回転されると、ギア54を介してスライドユニット31Lh内の台形ネジシャフトと共にプーリ46が回転される。
【0052】
また、支持部材50aには、パルスカム53の回転を検知するためのパルスカムセンサ55,56が取り付けられている。パルスカムセンサ55,56は、パルスカム53の通過を検出することにより、フィールドモータ45の回転数と回転方向を検出するためのものである。フィールドモータ45の回転数と回転方向を検出することにより、景品フィールド16Lの高さ(上下の位置)を算出することができる。
【0053】
パルスカムセンサ55は、パルスカム53に対して上に配設され、パルスカムセンサ56は、パルスカム53に対して横に配設されている。パルスカム53の外周には、例えば4つの突起部と切りかけ部が交互に設けられている。従って、パルスカムセンサ55,56は、パルスカム53が1回転される間に、オン(突起部の通過を検出)とオフ(切りかけ部の通過を検出)を繰り返して検出する。ただし、パルスカムセンサ55,56によるオン(突起部の通過を検出)のタイミングが異なるように、パルスカムセンサ55,56の配置とパルスカム53の形状が決められている。例えば、パルスカム53が右回転(時計回り)する場合には、パルスカムセンサ55,56によるパルスカム53の検出は、例えばオン/オン、オン/オフ、オフ/オフ、オフ/オン,オン/オン…のように変化し、パルスカム53が左回転する場合には、オン/オフ、オン/オン、オフ/オン、オフ/オフ,オン/オフ…のように変化する。このパルスカムセンサ55,56の検出変化をもとに、フィールドモータ45の回転方向、すなわち景品フィールド16Lを上方向に移動させているか、あるいは下方向に移動させているかを判別することができる。また、パルスカムセンサ55,56の少なくとも何れか一方によるオン検出の回数をもとにして、フィールドモータ45の回転量を検出することができ、このフィールドモータ45の回転量をもとにして景品フィールド16Lの位置(高さ)を算出することができる。
【0054】
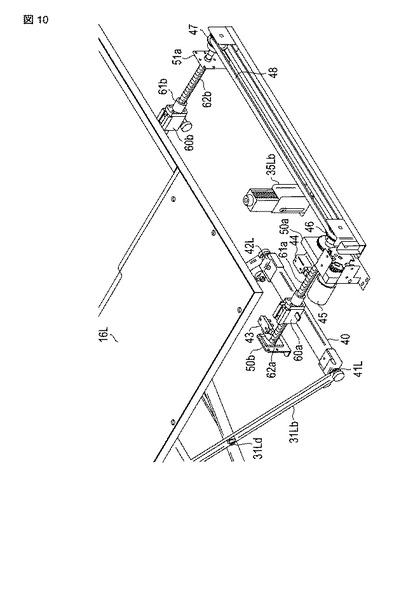
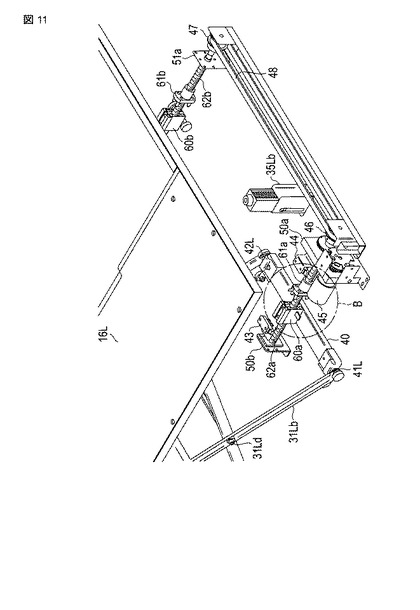
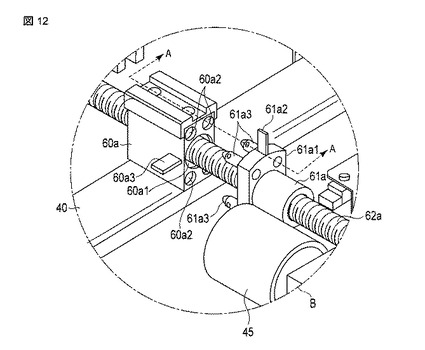
図10及び図11は、図7に示すスライドユニット31Lh,33Lhの内部構成を示す図、図12は、図11中に示す範囲Bの詳細な構成を示す斜視図である。図10は、通常の状態を示し、図11及び図12は、安全機構が働いた状態を示している。
【0055】
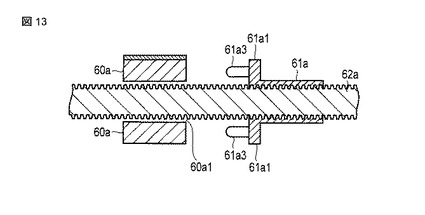
スライドユニット31Lh内では、支持部材50aと支持部材50bとの間に、台形ネジシャフト62aが軸支されている。台形ネジシャフト62aには、ナット61aが螺合されている。従って、台形ネジシャフト62aがフィールドモータ45の動力が伝達されて回転されると、ナット61aは、台形ネジシャフト62aに沿って移動する。また、台形ネジシャフト62aは、連結部材40に取り付けられたスライダブロック60aの貫通孔60a1に貫通している。
【0056】
図13は、図12に示すA−A線における断面図を示している。図13に示すように、台形ネジシャフト62aと貫通孔60a1とは螺合されていないため、スライダブロック60aは、台形ネジシャフト62aの回転に関係無く、台形ネジシャフト62aに沿って移動することができる。図11〜図13に示すように、スライダブロック60aとナット61aとを固定しない構成とすることで、上下機構の可動範囲に障害物等があった場合であっても故障等を発生させないようにする安全機構として機能させることができる。
【0057】
通常、スライダブロック60aは、図10に示すように、ナット61aに設けられたフランジ61a1に圧接された状態となっている。すなわち、景品フィールド16L自体の重さや景品フィールド16Lに載置された景品の重さによってX部材31L,32Lが押し下げられ、連結部材40をナット61aの方向に移動させるように荷重がかかる。このため、連結部材40に設けられたスライダブロック60aは、ナット61aに押しつけられた状態となる。従って、フィールドモータ45の駆動力により台形ネジシャフト62aを回転させ、ナット61aをスライダブロック60a側に移動させると、ナット61aに圧接された状態のスライダブロック60aが荷重に反して移動して、連結部材40及びX部材31L,32Lを介して景品フィールド16Lを押し上げる。また、フィールドモータ45を逆回転させることにより台形ネジシャフト62aを回転させ、ナット61aを支持部材50a側に移動させると、スライダブロック60aがナット61aに圧接された状態のまま移動して景品フィールド16Lを押し下げる。
【0058】
台形ネジシャフト62aとナット61aとは、台形ねじにより螺合されているため安定して位置を固定することができ、景品フィールド16Lに多数の景品が載置されて重量が増した場合であっても安定して高さを維持(固定)することができる。
【0059】
なお、スライダブロック60aとナット61aのフランジ61a1とが圧接される場合、図12に示すような、スライダブロック60aのフランジ61a1との対向面に設けられた複数(図12では4つ)の穴60a2に、フランジ61a1のスライダブロック60aとの対向面に設けられた複数(図12では4つ)の突起部61a3が挿入される。このため、台形ネジシャフト62aの軸と交差する方向に負荷が掛かる場合であっても、スライダブロック60aとナット61a(フランジ61a1)とが結合された状態を安定に保つため、他の部材に余分な負荷が掛からず故障などを回避することができる。
【0060】
なお、図12に示すフランジ61a1の上部に設けられた板部材61a2は、スライドユニット31Lhの上部に設けられたスリットから突出される。板部材61a2は、上部リミットセンサ43と下部リミットセンサ44によって検出される。台形ネジシャフト62aの回転によってフランジ61a1が下部リミットセンサ44の位置まで到達したことが検出されると、景品フィールド16Lが最下位置まで下がったことが判別できるためフィールドモータ45の駆動が停止される。同様にして、台形ネジシャフト62aの回転によってフランジ61a1が上部リミットセンサ43の位置まで到達したことが検出されると、景品フィールド16Lが最上位置まで上がったことが判別できるためフィールドモータ45の駆動が停止される。
【0061】
また、図12に示すように、スライダブロック60aの側面には、板部材60a3が設けられている。板部材60a3は、スライドユニット31Lhの側面に設けられたスリットから突出しており、スライダブロック60aの移動に伴って移動する。スライダブロック60aは、スライドユニット31Lhの近傍に設けられたスライドセンサ(図20に示すスライドセンサ85)によって検出される。スライドセンサは、例えばナット61aとスライダブロック60aとが圧接された状態で移動し、ナット61a(板部材61a2)が下部リミットセンサ44によって検出される位置まで移動した時に、板部材60a3を検出する位置に設けられている。すなわち、スライダブロック60aに設けられた板部材60a3をスライドセンサにより検出することで、ナット61a(板部材61a2)を下部リミットセンサ44により検出される位置まで移動させることで、正常に景品フィールド16Lが最下位置まで移動されたことを判別することができる。もし、ナット61a(板部材61a2)を下部リミットセンサ44により検出される位置まで移動させても、スライドセンサにより板部材60a3を検出できなかった場合には、可動範囲に障害物などがあるために安全機構が働いて、景品フィールド16Lが最下位置まで降下していないと判別できる。
【0062】
なお、スライドユニット33Lhは、前述したスライドユニット31Lhと同様の部材が収納されている。すなわち、図10及び図11に示すように、スライドユニット33Lh内では、2つの支持部材51aの間に、台形ネジシャフト62bが軸支されている。台形ネジシャフト62bには、ナット61bが螺合されている。従って、ベルト48、プーリ47を介してフィールドモータ45の動力が伝達されて台形ネジシャフト62bが回転されると、ナット61bは、台形ネジシャフト62bに沿って移動する。これにより、ナット61bに圧接された状態にあるスライダブロック60bは、スライダブロック60bに沿って移動し、スライドユニット31Lh側と連動して、景品フィールド16Lを上昇あるいは下降させる。
【0063】
通常の状態では、図10に示すように、景品フィールド16L自体の重さや景品フィールド16Lに載置された景品の重さによって、スライダブロック60a,60bを、ナット61a,61bに圧接させるように荷重がかかっている。上下機構は、例えば管理者が透明板15を開放して、景品フィールド16L,16Rへの景品の入れ替えや補充をする際に、景品のサイズ等に合わせて景品フィールド16L,16Rの高さを調整する場合等に使用される。管理者がこうした作業をしている間に、例えば、X部材31L,32L,33L等の構造部材の可動範囲に景品等が落下したり、管理者が誤って手を可動範囲に入れてしまうおそれがある。
【0064】
本実施形態における上下機構では、可動範囲に景品等の障害物があった状態で、景品フィールド16Lを下降させるようフィールドモータ45を駆動し、ナット61aを下部リミットセンサ44が設けられた側に移動させた場合、図11〜図13に示すように、ナット61aとスライダブロック60aとが離間する。すなわち、可動範囲に障害物があって景品フィールド16Lが下降できない状態にある場合には、安全機構が機能して、フィールドモータ45による駆動力により強制的に景品フィールド16Lを下降させることがない。このため、障害物があっても構造部材やフィールドモータ45に想定外の負荷を与えてしまうこともないため故障等を招かないですむ。また、障害物(景品や管理者の手など)に対するフィールドモータ45による過剰な負荷も発生させないため安全性も確保できる。
【0065】
こうした場合、ナット61aが景品フィールド16Lを最下位置にする位置まで移動されて下部リミットセンサ44により検出されても、スライダブロック60aがナット61aと離間して停止しているためスライドセンサによる検出がない。従って、下部リミットセンサ44とスライドセンサによる検出状態をもとにして、障害物等により景品フィールド16Lが正常に下降されていないことを判別し、例えば警報等を出力することができる。
【0066】
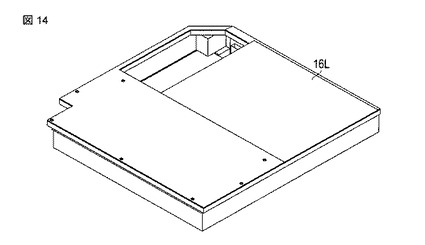
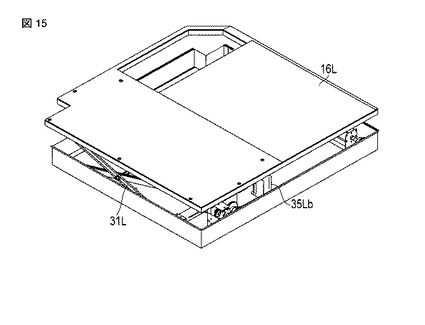
次に、補助スプリングユニット35La,35Lbによる作用効果について説明する。図14、図15、図16、及び図17は、駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図である。
図14は、景品フィールド16Lが最下位置(初期位置)にある状態を示している。駆動ユニット30Lは、景品フィールド16Lの上昇が指示されると、フィールドモータ45を駆動する。図14あるいは図15に示すように、景品フィールド16Lが最下位置近くにある時には、補助スプリングユニット35La,35Lbによって景品フィールド16Lの底部が支持されている。補助スプリングユニット35La,35Lbは、スプリングによる反発力により景品フィールド16Lを上方向へ押し上げるように作用しているため、駆動ユニット30Lによる押し上げを補助する。
【0067】
図16及び図17に示すように、景品フィールド16Lの底部から補助スプリングユニット35La,35Lbが離間すると、駆動ユニット30Lによる駆動力のみによって景品フィールド16Lが上昇される。
【0068】
本実施形態におけるクレーンゲーム装置10では、図7に示すように、連結部材40を水平方向に移動させることにより、X部材31L,32L,33Lを介して、景品フィールド16Lを垂直方向に移動させる。こうした、X部材31L,32L,33Lを介して景品フィールド16Lを上方向に移動させる構造では、機構全体をコンパクトにできる一方、最下位置(初期位置)にある景品フィールド16Lを上昇させる際に最も大きな力を必要とする。
【0069】
本実施形態におけるクレーンゲーム装置10では、補助スプリングユニット35La,35Lbを設けて、最も大きな力を必要とする景品フィールド16Lが最下位置近傍にある時の押し上げを補助するようにしたので、強力な駆動力を有する高価なフィールドモータを用いたり、複数のフィールドモータを用いることなく、1つのフィールドモータ45により景品フィールド16Lの初期位置からの押し上げを実現している。
【0070】
図18(a)(b)(c)は、景品フィールド16Lが最下位置(初期位置)から押し上げられる時の補助スプリングユニット35Laの変化を示す図である。なお、景品フィールド16Lは、水平に上下動される構成であるので、補助スプリングユニット35Lbも同様に変化する。
【0071】
補助スプリングユニット35Laは、図18(a)〜(c)に示すように、外筐体35aに内筐体35bが上下動可能となるように内挿されている。外筐体35aと内筐体35bの内部には、伸縮可能な弾性部材としてスプリング35cが収容されている。内筐体35bの上端部には、景品フィールド16Lの底部と接触するゴム等による緩衝部材35dが設けられている。
【0072】
補助スプリングユニット35Laは、景品フィールド16Lと接触していない場合には、図18(c)に示すように、スプリング35cが伸張した状態にあり、内筐体35bを外部に押し上げている。
【0073】
フィールドモータ45が駆動されておらず景品フィールド16Lが最下位置にある場合には、図18(a)に示すように、スプリング35cが圧縮されて、内筐体35bが外筐体35aに押し込まれた状態となる。すなわち、補助スプリングユニット35La(及び補助スプリングユニット35Lb)のみでは、景品フィールド16Lを押し上げることはできない。
【0074】
図19は、補助スプリングユニット35La,35Lbとフィールドモータ45による景品フィールド16Lを上下動させる力関係を示す図である。
図19に示す例では、例えば補助スプリングユニット35La(35Lb)は、景品フィールド16Lの高さが0〜50mmの範囲にある時に、景品フィールド16Lの底部に接触しており、スプリング35cの作用により景品フィールド16Lを押し上げている。
【0075】
図18(a)の状態において、フィールドモータ45が駆動されると、フィールドモータ45による動力に加えて、図18(b)に示すように補助スプリングユニット35La(35Lb)による押し上げ力が補助(付加)されるため、景品フィールド16Lを押し上げることができる。補助スプリングユニット35La(35Lb)による押し上げ力は、図18(c)に示すように、スプリング35cが伸びきるまで加えられる。
【0076】
フィールドモータ45は、図19に示すように、景品フィールド16Lの高さが50mmに到達する前、例えば40mm程度になると補助スプリングユニット35La(35Lb)による補助なして景品フィールド16Lを押し上げることができる。従って、補助スプリングユニット35La(35Lb)による補助を景品フィールド16Lが50mmになるまで加えることにより、景品フィールド16Lを初期位置から50mmを越えるまでスムーズに押し上げることが可能となる。
【0077】
なお、前述した説明では、景品フィールド16L,16Rの押し上げを補助するために補助スプリングユニット35La,35Lbを設ける構成としているが、他の補助ユニットを設ける構成としても良い。例えば、スプリング以外の弾性部材、例えばゴムなどを用いても良い。また、弾性部材を用いたユニットだけでなく、他の油圧や磁力などを利用して押し上げ力を供給できる補助ユニットとすることも可能である。
【0078】
また、景品フィールド16Lが初期位置近くにある時に押し上げを補助できれば良いため、前述したように景品フィールド16Lの底部より上方向に押し上げるように補助するだけでなく、例えば、連結部材40を水平方向に移動させるように補助する補助ユニットを設けるようにしても良い。例えば、景品フィールド16Lが最下位置にある時の連結部材40を、上部リミットセンサ43の方向に水平に引っ張るように作用するスプリング等の弾性部材を有する補助ユニットを設けることも可能である。前述と同様に、弾性部材以外によって動力を供給するユニットとしても良い。
【0079】
また、前述した説明では、スライドユニット31Lh,33Lhに収容された台形ネジシャフト62a,62bを回転させることでナット61a,61bを移動させ、スライダブロック60a,60b(連結部材40)の位置を調整しているが、他の機構によって連結部材40を水平方向に移動させるようにしても良い。例えば、台形ネジシャフト62a,62bに替えてスライドレールに沿って連結部材40を水平に移動可能に構成することも可能である。スライドレールを用いた場合、連結部材40を移動させる動力として、例えばモータや磁力などを使用することが可能である。
【0080】
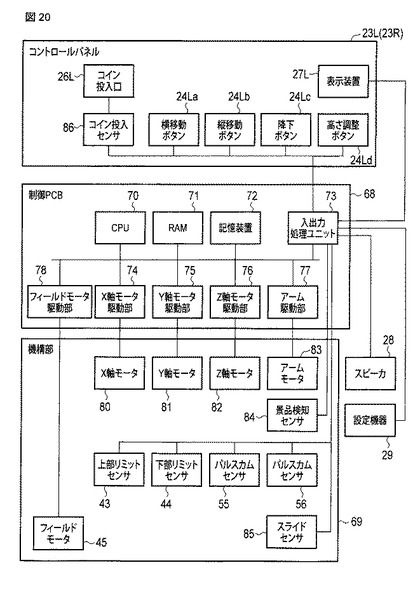
図20は、本実施形態におけるクレーンゲーム装置10の機能構成を示すブロック図である。
図20に示すように、クレーンゲーム装置10の筐体内部には、各種ユニットが実装された制御PCB(Print Circuit Board)68が設けられている。制御PCB68に実装されたユニットには、CPU70、RAM71、記憶装置72、入出力処理ユニット73、X軸モータ駆動部74、Y軸モータ駆動部75、Z軸モータ駆動部76、アーム駆動部77、及びフィールドモータ駆動部78を含む。
【0081】
CPU70は、RAM71あるいは記憶装置72に記憶された制御プログラムやゲームプログラムを実行することにより、クレーンゲーム装置10全体を制御する。CPU70は、入出力処理ユニット73を介して入力されるコイン投入の検知信号に応じて、プレイ可能回数を示すクレジットデータをRAM71に記録する。また、CPU70は、入出力処理ユニット73を介して入力されるユーザ操作により指示されたクレーンアーム18L,18Rを移動させる指示に応じて、X軸モータ駆動部74、Y軸モータ駆動部75、Z軸モータ駆動部76、及びアーム駆動部77を制御して機構部69の各部を適宜動作させる。また、CPU70は、入出力処理ユニット73を介して入力されるユーザ操作により指示された景品フィールド16L,16Rを上下動させる指示に応じて、フィールドモータ駆動部78を制御して上下機構(フィールドモータ45)を適宜動作させる。また、CPU70は、入出力処理ユニット73を介して、スピーカ28からの音声出力、表示装置27L,27Rにおける表示を制御する。
【0082】
RAM71は、制御プログラムやゲームプログラム等の各種プログラムの他、CPU70により実行される処理に伴うゲームを制御するための各種データを一時的に記憶する。RAM71に記録されるデータには、例えばプレイ可能回数を示すクレジットデータ、クレーンアーム18L,18Rの位置(X位置、Y位置)を示す位置データ等が含まれる。
【0083】
記憶装置72は、ROMやハードディスク等の不揮発性の記憶媒体にプログラムやデータを記憶する。
入出力処理ユニット73は、制御PCB68の外部に設けられた各種入出力デバイスとのインタフェースである。
X軸モータ駆動部74は、機構部69に設けられたX軸モータ80の駆動を制御する。
【0084】
Y軸モータ駆動部75は、機構部69に設けられたY軸モータ81の駆動を制御する。
【0085】
Z軸モータ駆動部76は、機構部69に設けられたZ軸モータ82の駆動を制御する。
【0086】
アーム駆動部77は、クレーンアーム18L,18Rに設けられたアーム18La,18Raを開閉させるためのアームモータ83の駆動を制御する。
【0087】
フィールドモータ駆動部78は、CPU70の制御のもとで、景品フィールド16L,16Rを上下動させる動力源とするフィールドモータ45の駆動を制御する。
【0088】
機構部69は、例えば左側ユニット10Lと右側ユニット10Rのそれぞれに設けられる。機構部69は、図20に示すように、X軸モータ80、Y軸モータ81、Z軸モータ82、アームモータ83、景品検知センサ85、上部リミットセンサ43、下部リミットセンサ44、フィールドモータ45、パルスカムセンサ55、パルスカムセンサ56、及びスライドセンサ84が含まれる。
X軸モータ80は、X軸モータ駆動部74により駆動されるもので、クレーンアーム18L,18RをX軸方向(横方向)に移動させる。
Y軸モータ81は、Y軸モータ駆動部75により駆動されるもので、クレーンアーム18L,18RをY軸方向(縦方向)に移動させる。
Z軸モータ82は、Z軸モータ駆動部76により駆動されるもので、クレーンアーム18L,18RをZ軸方向(上下方向)に移動させる。
アームモータ83は、アーム駆動部77により駆動されるもので、クレーンアーム18L,18Rのアーム18La,18Raを開閉させる。
【0089】
景品検知センサ84は、クレーンアーム18L,18Rの操作によりプレーヤに景品が払い出されたことを検知する。
【0090】
コンパネ部23Lには、図20に示すように、コイン投入口26L、コイン投入センサ86、横移動ボタン24La、縦移動ボタン24Lb、降下ボタン24Lc、高さ調整ボタン24Ld、及び表示装置27Lが含まれる。なお、コンパネ部23Rは、コンパネ部23Lと同様に構成されるものとして説明を省略する。
コイン投入センサ86は、コイン投入口26Lから投入されたコインを検知して、入出力処理ユニット73に、コイン投入を示す検知信号を出力する。CPU70は、入出力処理ユニット73に入力された検知信号に応じて、プレイ可能回数を示すクレジットデータを記録する。
【0091】
横移動ボタン24Laは、プレーヤによるクレーンアーム18Lを横方向(X軸方向)に移動させる指示を入力するためのものである。横移動ボタン24Laは、プレーヤにより押下されている場合、押下された状態にあることを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて横移動ボタン24Laが押下されていることを検知すると、X軸モータ駆動部74を介してX軸モータ80を駆動してクレーンアーム18Lを横方向(X軸方向)に移動させる。CPU70は、横移動ボタン24Laが押されていない場合には、X軸モータ80の駆動を停止させる。
【0092】
縦移動ボタン24Lbは、プレーヤによるクレーンアーム18Lを縦方向(Y軸方向)に移動させる指示を入力するためのものである。縦移動ボタン24Lbは、プレーヤにより押下されている場合、押下された状態にあることを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて縦移動ボタン24Lbが押下されていることを検知すると、Y軸モータ駆動部75を介してY軸モータ81を駆動してクレーンアーム18Lを縦方向(Y軸方向)に移動させる。CPU70は、縦移動ボタン24Lbが押されていない場合には、Y軸モータ81の駆動を停止させる。
【0093】
降下ボタン24Lcは、プレーヤによるクレーンアーム18Lに対して景品取得シーケンスを開始させる指示を入力ためのものである。降下ボタン24Lcは、プレーヤにより押下されると、押下されたことを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて降下ボタン24Lcが押下されたことを検知すると、景品取得シーケンスとして、Z軸モータ駆動部76を介してクレーンアーム18Lの先端部が景品に到達する位置まで下降させ、アーム駆動部77を通じてアーム18Laに景品を掴む動作をさせた後、クレーンアーム18Lを上昇させる。
【0094】
高さ調整ボタン24Ldは、プレーヤにより景品フィールドの高さを調整できる上下機構の動作モード(後述する「ノーマル」)が設定されている場合に、プレーヤから景品フィールドの高さ調整の指示を入力するためのものである。高さ調整ボタン24Ldは、プレーヤに押下されることにより、押下されたことを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて高さ調整ボタン24Ldが押下されていることを検知すると、フィールドモータ駆動部78を介してフィールドモータ45を駆動して景品フィールド16Lを上下動させる。
【0095】
表示装置27Lは、CPU70の制御のもとで各種の情報を表示する。表示装置27Lには、例えばクレジット数(プレイ可能回数)や動作モードの表示などが表示される。また、表示装置27Lには、上下機構の動作モードがゲーム処理中に景品フィールド16Lを上下動させる設定となっている場合に、プレーヤに景品フィールド16Lが上下動することを通知するためのメッセージを表示する。例えば、プレーヤにより景品フィールドの高さを調整できる上下機構の動作モード(後述する「ノーマル」)が設定されている場合には、高さ調整ボタン24Ldを操作することで景品フィールド16Lの高さを変更できることを通知するメッセージを表示する。
【0096】
なお、設定機器29は、管理者がクレーンゲーム装置10に対して各種設定をするために使用されるもので、例えば各種の設定操作を入力するための複数のボタン(選択ボタン、決定ボタン、上下左右ボタン等)、各種設定画面等を表示するためのディスプレイ等が実装されている。なお、コンパネ部23L,23Rに設けられたボタン24と表示装置27L,27Rを用いて設定操作するようにしても良い。
【0097】
次に、本実施形態におけるクレーンゲーム装置10の上下機構に関係する動作について説明する。
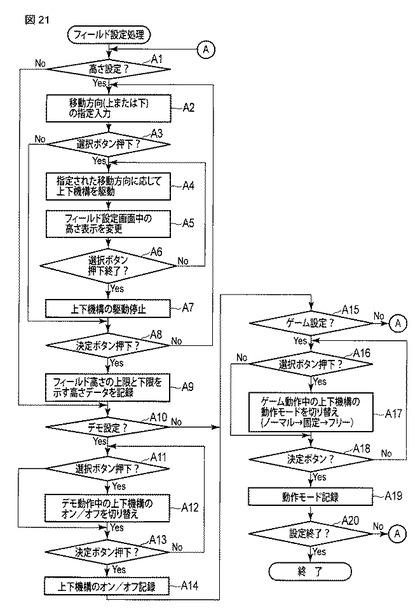
まず、上下機構に対する各種設定をするためのフィールド設定処理について、図21に示すフローチャートを参照しながら説明する。フィールド設定処理は、例えばクレーンゲーム装置10の管理者が設定機器29を用いて行われるもので、例えば左側ユニット10Lと右側ユニット10R(景品フィールド16L,16Rに対する上下機構)について、個別に高さ設定、デモ設定、ゲーム設定をすることができる。ここでは、左側ユニット10Lの上下機構について設定を行うものとして説明する。
【0098】
まず、設定機器29の操作によってフィールド設定処理の起動が指示されると、CPU70は、設定機器29のディスプレイに設定対象項目メニュー(高さ設定、デモ設定、ゲーム設定)を表示させる。
【0099】
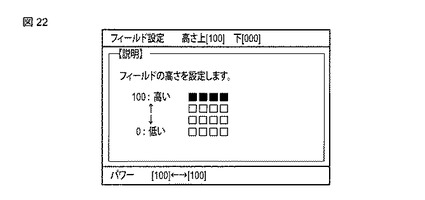
ここで、高さ設定が選択されると(ステップA1、Yes)、CPU70は、例えば図22に示すような高さ設定用の画面を表示させると共に、設定対象とする景品フィールド16Lの高さ上限または下限(上または下)の指定を入力する(ステップA2)。ここで、例えば高さ上限(上)が指示され、選択ボタンにより景品フィールド16Lの移動が指示されると、CPU70は、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動する(ステップA4)。CPU70は、選択ボタンが押されている間、上下機構を駆動して景品フィールド16Lを移動させる。
【0100】
CPU70は、入出力処理ユニット73を通じて入力されるパルスカムセンサ55,56の検出結果をもとに景品フィールド16Lの現在の高さを算出し、図22に示す高さ設定用の画面中の高さを表す数字と、高さを表現するイメージを更新する(ステップA5)。CPU70は、選択ボタンが押下されている間、景品フィールド16Lを移動可能な上限と下限の間で往復移動させる(ステップA4〜A6)。
【0101】
管理者は、景品フィールド16Lが希望する高さにまで移動されたタイミングに合わせて選択ボタンの押下を終了する。選択ボタンの押下が終了されると(ステップA6、Yes)、CPU70は、上下機構の駆動を停止させる(ステップA7)。
【0102】
ここで、前述と同様にして、高さ下限(下)が指示され、選択ボタンにより景品フィールド16Lの移動が指示されると、景品フィールド16Lを移動させて、管理者が希望する高さで停止させる(ステップA2〜A7)。
【0103】
こうして、景品フィールド16Lの高さ上限と下限の位置が指定され、決定ボタンが押下されると(ステップA8、Yes)、CPU70は、景品フィールド16Lの高さ上限と下限を示すデータを、例えば記憶装置72に記録する。
【0104】
ここで設定された景品フィールド16Lの上限と下限は、後述する動作モード「ノーマル」において、景品フィールド16Lの移動可能範囲を示す。また、景品フィールド16Lの上限は、後述する動作モード「固定」において、景品フィールド16Lの高さを示す。
【0105】
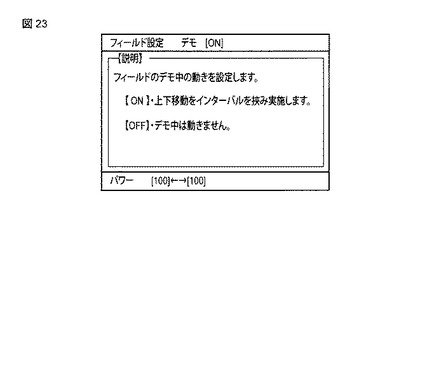
次に、設定対象項目メニューにおいて、デモ設定が選択されると(ステップA10、Yes)、CPU70は、例えば図23に示すようなデモ設定用の画面を表示させる。デモ設定用の画面では、現在の設定状態(オンまたはオフ)を表示する。ここで、選択ボタンが押下されると(ステップA11、Yes)、CPU70は、デモ動作中の上下機構のオン/オフを切り替える(ステップA12)。例えば現在の設定状態が「オン」であった場合には「オフ」に切り替え、現在の設定状態が「オフ」であった場合には「オン」に切り替える。
【0106】
こうして、デモ動作中の上下機構の「オン」または「オフ」が指定され、決定ボタンが押下されると(ステップA13、Yes)、CPU70は、デモ動作中の上下機構の「オン」あるいは「オフ」を示すデータを、例えば記憶装置72に記録する(ステップA14)。
【0107】
ここで設定された上下機構のオン/オフは、クレーンゲーム装置10がプレーヤにより利用されていない時に実行されるデモ動作において参照される。上下機構「オン」が設定された場合には、デモ動作中において、インターバルを挟みながら景品フィールド16Lを上下移動させる。これにより、プレーヤに対してクレーンゲーム装置10をアピールし、クレーンゲーム装置10の利用を促すことができる。
【0108】
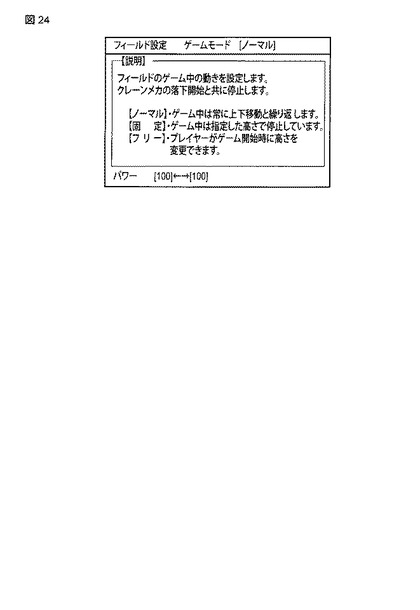
次に、設定対象項目メニューにおいて、ゲーム設定が選択されると(ステップA15、Yes)、CPU70は、例えば図24に示すようなゲーム設定用の画面を表示させる。ゲーム設定用の画面では、現在の上下機構の動作モード(図24では「ノーマル」)を表示する。本実施形態におけるクレーンゲーム装置10では、上下機構の動作モードとして例えば「ノーマル」「固定」「フリー」が用意されている。「ノーマル」は、ゲーム中は常に景品フィールド16Lを上限と下限との間で上下動させるモードである。「固定」は、指定した高さ(高さ設定により設定された上限の高さ)で景品フィールド16Lを停止させるモードである。「フリー」は、プレーヤがゲーム開始前にプレーヤが高さを変更できるようにするモードである。
【0109】
ここで、選択ボタンが押下されると(ステップA16、Yes)、CPU70は、動作モードを「ノーマル」「固定」「フリー」の順に切り替える(ステップA17)。例えば現在の動作モードが「ノーマル」であった場合には「固定」に切り替え、「固定」であった場合には「フリー」に切り替え、「フリー」であった場合には「ノーマル」に切り替える。
【0110】
こうして、上下機構の動作モードが指定され、決定ボタンが押下されると(ステップA18、Yes)、CPU70は、上下機構の動作モードを示すデータを、例えば記憶装置72に記録する(ステップA19)。
【0111】
ここで設定された上下機構の動作モードは、クレーンゲーム装置10がプレーヤにより利用される場合のゲーム処理を制御するために参照される。
【0112】
フィールド設定処理では、前述したように高さ設定、デモ設定、ゲーム設定のそれぞれについて、管理者が任意に設定することができる(ステップA1〜A19)。処理の終了が指示されると、CPU70は、フィールド設定処理を終了する。
【0113】
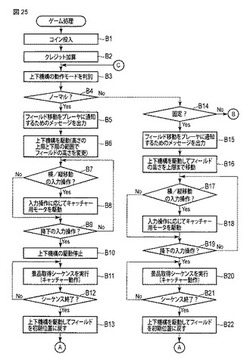
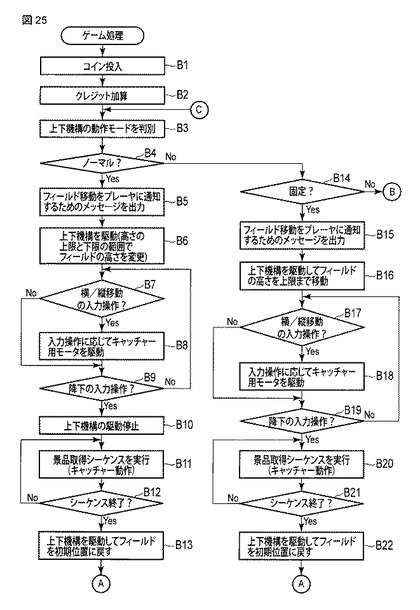
次に、プレーヤの操作により実行されるゲーム処理について、図25及び図26に示すフローチャートを参照しながら説明する。ゲーム処理では、前述したフィールド設定処理による設定内容に応じて上下機構が制御される。
【0114】
まず、クレーンゲーム装置10をプレイするために、プレーヤによりコイン投入口26Lからコインが投入される。コイン投入センサ86は、コインが投入されたことを検知すると入出力処理ユニット73に検知信号を出力する。CPU70は、コイン投入センサ86からの検知信号によりコイン投入を検知すると(ステップB1)、プレイ可能回数を示すクレジット数を加算し、その値を示すクレジットデータをRAM71に記録する(ステップB2)。ここで、複数のプレイ回数分のコインが投入された場合には、複数回分のプレイ可能回数を示すクレジットデータを記録する。CPU70は、クレジットデータの記録に応じて、例えば表示装置27Lにプレイ可能回数(クレジット数)を表示させる。
【0115】
CPU70は、現在の上下機構の動作モードを判別し(ステップB3)、動作モードに応じた制御を開始する。ここで、動作モードが「ノーマル」に設定されている場合(ステップB4、Yes)、CPU70は、ゲーム中(ボタンに対する入力操作が可能な期間)に景品フィールド16Lが上下動することをプレーヤに通知するためのメッセージを出力する(ステップB5)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0116】
CPU70は、フィールド設定処理の高さ設定において指定された高さの上限と下限を示すデータを読み出し、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動して、景品フィールド16Lを上限と下限の範囲で往復移動させる。CPU70は、入出力処理ユニット73を通じて入力されるパルスカムセンサ55,56による検出結果をもとに景品フィールド16Lの現在の高さを算出し、上限あるいは下限に到達したと判別された場合に、フィールドモータ45の回転方向を逆転させることで、景品フィールド16Lを範囲内で往復移動させる。
【0117】
プレーヤは、景品フィールド16Lが上下動されている間に、景品フィールド16Lに載置された景品を取得できるようにクレーンアーム18Lを操作する。
【0118】
CPU70は、横移動ボタン24Laあるいは縦移動ボタン24Lbの操作により、クレーンアーム18Lを横/縦移動させる指示があると(ステップB7、Yes)、入力操作に応じて、クレーンアーム18Lを移動させるためのモータを駆動して、クレーンアーム18Lを移動させる。すなわち、CPU70は、横移動ボタン24Laが操作された場合には、X軸モータ駆動部74を通じてX軸モータ80を駆動して、クレーンアーム18Lを横方向(X軸方向)に移動させる。また、CPU70は、縦移動ボタン24Lbが操作された場合には、Y軸モータ駆動部75を通じてY軸モータ81を駆動して、クレーンアーム18Lを縦方向(Y軸方向)に移動させる。
【0119】
また、降下ボタン24Lcの押下が検知された場合(ステップB9、Yes)、CPU70は、景品取得シーケンスによりクレーンアーム18Lを下降させる前に上下機構の駆動を停止する(ステップB10)。すなわち、上下機構により景品フィールド16Lが上昇されている場合にクレーンアーム18Lを下降させると、クレーンアーム18Lが景品フィールド16Lあるいは景品フィールド16Lに載置された景品と強く衝突して破壊してしまうおそれがあるため、景品フィールド16Lの上下動を停止させた後、CPU70は、クレーンアーム18Lに対して景品取得シーケンスによる制御を行う(ステップB11)。
【0120】
景品取得シーケンスでは、CPU70は、Z軸モータ駆動部76を介してクレーンアーム18Lの先端部が景品に到達する位置まで下降させ、アーム駆動部77を通じてアーム18Laに景品を掴む動作をさせた後、クレーンアーム18Lを上昇させる。そして、クレーンアーム18Lを景品落とし口の上方まで移動させてからアーム18Laに景品を離す動作をさせた後、初期位置に移動させる。
【0121】
なお、前述したように、降下ボタン24Lcの押下が検知された場合に、直ちに上下機構の駆動を停止させるのではなく、降下ボタン24Lcの押下に応じて景品取得シーケンス(クレーンアーム18Lの下降)を開始すると共に上下機構の駆動を継続しても良い。この場合、CPU70は、動作中の景品フィールド16Lとクレーンアーム18Lの現在の高さを算出して、両者の高さをもとにして衝突する前に上下機構の駆動を停止させる。
【0122】
景品取得シーケンスが終了すると(ステップB12、Yes)、CPU70は、上下機構を駆動して景品フィールド16Lを初期位置に戻す(ステップB13)。
【0123】
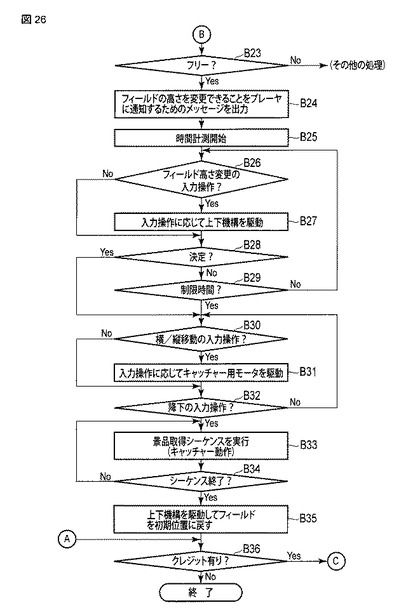
CPU70は、クレジット(プレイ可能回数)の残りがある場合(ステップB36、Yes)、クレジットを減算してプレイ可能回数を−1した後、次のプレイ状態に移行する(ステップB3〜)。一方、クレジット(プレイ可能回数)の残りがない場合(ステップB36、No)、CPU70は、ゲーム処理を終了する。
【0124】
このように、動作モード「ノーマル」では、景品フィールド16Lが上下動している間にクレーンアーム18Lを操作するため、高さが固定されている場合より変化を楽しむことができる。
【0125】
一方、動作モードが「固定」に設定されている場合(ステップB14、Yes)、CPU70は、景品フィールド16Lの高さを変更することをプレーヤに通知するためのメッセージを出力する(ステップB15)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0126】
CPU70は、フィールド設定処理の高さ設定において指定された高さの上限を示すデータを読み出し、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動して、景品フィールド16Lを上限まで移動させる(ステップB16)。すなわち、動作モード「固定」では、管理者がフィールド設定処理において設定された高さ上限に景品フィールド16Lの高さを調整した後に、ゲームを開始する。以下、クレーンアーム18Lに対する制御については(ステップB17〜B21)、前述した動作モード「ノーマル」と同様に実行されるものとして詳細な説明を省略する。ただし、動作モード「固定」では、ゲーム中に景品フィールド16Lが上下動していないので、景品フィールド16Lを降下させる指示があった場合に(ステップB19)、上下機構の駆動を停止させる処理(ステップB10)は実行しない。
【0127】
CPU70は、景品取得シーケンスを実行した後、上下機構を駆動して、景品フィールド16Lを初期位置に戻す(ステップB22)。また、クレジットの残りがある場合には(ステップB36、Yes)、前述と同様の処理を繰り返して実行する。
【0128】
このように、動作モード「固定」では、景品フィールド16Lを予め決めた高さに調整した後にゲームを開始させるので、景品フィールド16Lに載置された景品の大きさ等に応じた高さ調整をすることができる。
【0129】
また、動作モードが「フリー」に設定されている場合(ステップB23、Yes)、CPU70は、景品フィールド16Lの高さをプレーヤの操作により変更できることをプレーヤに通知するためのメッセージを出力する(ステップB24)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0130】
景品フィールド16Lの高さ調整は、予め決められた制限時間内で実行されるものとする。このため、CPU70は、制限時間の経過を判別するために時間計測を開始する(ステップB25)。
【0131】
ここで、高さ調整ボタン24Ldの入力操作によって景品フィールド16Lの高さ変更が指示されると(ステップB26、Yes)、CPU70は、入力操作に応じて上下機構を駆動して、景品フィールド16Lを上下動させる(ステップB27)。例えば、CPU70は、高さ調整ボタン24Ldが押下されている間、上下機能を駆動して、景品フィールド16Lを上限と下限との間で往復移動させる。プレーヤは、希望する高さに景品フィールド16Lがある時に高さ調整ボタン24Ldを離すことで、景品フィールド16Lの位置決めをすることができる。この景品フィールド16Lの位置決めは、制限時間内であれば繰り返して実行することができる(ステップB29)。
【0132】
CPU70は、制限時間が経過した場合(ステップB29、Yes)、あるいは景品フィールド16Lの位置決めが決定し、例えば高さ調整ボタン24Ld以外のボタン(例えば横移動ボタン24La)の操作により決定が指示されると(ステップB28、Yes)、景品フィールド16Lを調整後の高さに固定してゲームを開始する。
【0133】
以下、クレーンアーム18Lに対する制御については(ステップB30〜B35)、前述した動作モード「固定」と同様に実行されるものとして詳細な説明を省略する。
【0134】
このように、動作モード「フリー」では、プレーヤがゲーム開始前に任意に景品フィールド16Lの高さを調整した後にゲームを開始することができる。従って、景品フィールド16Lに載置された景品に応じて、クレーンアーム18Lによって獲得し易いように景品フィールド16Lの高さを調整できる。例えば、小さな景品の場合には、景品フィールド16Lを高くすることで、クレーンアーム18Lと景品との距離を短くして、クレーンアーム18Lによって狙いやすくすることができる。
【0135】
なお、前述した動作モード「フリー」の場合では、ゲーム開始前にプレーヤが景品フィールド16Lの高さを調整できるようにしているが、ゲーム中(クレーンアーム18の移動を制御するための入力操作が可能な期間)にプレーヤの操作によって景品フィールド16Lの高さを調整できるようにしても良い。
【0136】
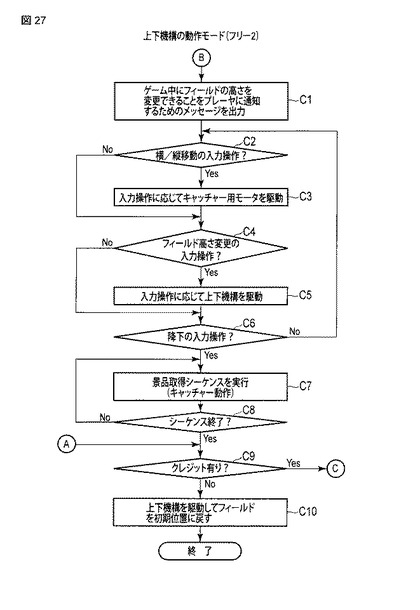
図27は、ゲーム中にプレーヤの操作によって景品フィールド16Lの高さを調整できる動作モード「フリー2」のフローチャートである。
この場合、CPU70は、ゲーム中に高さ調整ボタン24Ldの操作によって景品フィールド16Lの高さを変更できることをプレーヤに通知するためのメッセージを出力する(ステップC1)。
【0137】
CPU70は、横移動ボタン24Laあるいは縦移動ボタン24Lbの操作により、クレーンアーム18Lを横/縦移動させる指示があると(ステップC2、Yes)、入力操作に応じて、クレーンアーム18Lを移動させるためのモータを駆動して、クレーンアーム18Lを移動させる(ステップC3)。すなわち、CPU70は、横移動ボタン24Laが操作された場合には、X軸モータ駆動部74を通じてX軸モータ80を駆動して、クレーンアーム18Lを横方向(X軸方向)に移動させる。また、CPU70は、縦移動ボタン24Lbが操作された場合には、Y軸モータ駆動部75を通じてY軸モータ81を駆動して、クレーンアーム18Lを縦方向(Y軸方向)に移動させる。
【0138】
また、CPU70は、高さ調整ボタン24Ldの操作によって景品フィールド16Lの高さを変更する指示が入力されると(ステップC4、Yes)、上下機構を駆動して景品フィールド16Lの高さを変更する(ステップC5)。
【0139】
すなわち、プレーヤは、クレーンアーム18Lの縦横方向の移動操作と、景品フィールド16Lを上下動させる操作を組み合わせて、目的とする景品をクレーンアーム18Lによって獲得できるように調整することができる(ステップC2〜C5)。プレーヤは、クレーンアーム18Lの位置と景品フィールド16Lの高さを調整した後、降下ボタン24Lcによりクレーンアーム18Lの降下を指示する。
【0140】
降下ボタン24Lcの押下が検知された場合(ステップC6、Yes)、CPU70は、クレーンアーム18Lに対して前述と同様にして景品取得シーケンスによる制御を行う(ステップC7)。
【0141】
景品取得シーケンスが終了すると(ステップC8、Yes)、CPU70は、クレジット(プレイ可能回数)の残りがある場合(ステップC9、Yes)、クレジットを減算してプレイ可能回数を−1した後、次のプレイ状態に移行する。一方、クレジット(プレイ可能回数)の残りがない場合(ステップC9、No)、CPU70は、上下機構を駆動して景品フィールド16Lを初期位置に戻す(ステップC10)。
【0142】
すなわち、上下機構の動作モード「フリー2」の場合には、1プレイが終了した後、クレジットが残っていれば景品フィールド16Lを初期位置に戻さない。これにより、高さ調整ボタン24Ldの操作により高さを調整した景品フィールド16Lのまま、次のプレイを継続できるので、同じ高さ調整を繰り返して実行する必要が無く、また前回のプレイを参考に高さの微調整なども容易に実行できる。
【0143】
このように、動作モード「フリー2」では、ゲーム中にプレーヤが景品フィールド16Lの高さを調整することができるので、クレーンアーム18Lに対する操作と組み合わせて新たな景品取得の方法を試すことができ、プレーヤに興味を持たせることができる。
【0144】
なお、前述した上下機構では、景品フィールド16Lを水平にしたまま上下動させているが、景品フィールド16Lを傾斜させるように高さ調整できるようにしても良い。例えば、図5に示す上下機構の構成において、X部材31L,32L,33Lの高さを個別に調整できるようにすることで、景品フィールド16Lを左右に傾斜させることができる。X部材31L,32L,33Lの高さを個別に調整するために、例えば少なくとも両端のX部材31L,33Lに対応するフィールドモータを設け、個々にフィールドモータを制御して、前述したようにX部材31L,33Lにより景品フィールド16Lの高さを変更する。この場合、例えば管理者(あるいはプレーヤ)により傾斜方向(右傾斜、左傾斜)をボタン操作等によって指示できるようにすることで、X部材31L,33Lによる高さ調整を個々に変えることで景品フィールド16Lを右傾斜あるいは左傾斜させることができる。
【0145】
また、景品フィールド16Lを左右に傾斜させるだけでなく前後に傾斜させるようにしても良い。例えば、図5に示す上下機構の構成において、斜め部材31Lc,32Lc,33Lcの下端部を固定位置で回動するように取り付けているが、斜め部材31Lc,32Lc,33Lcの下端部についても斜め部材31Lb,32Lb,33Lbと同様にして水平方向に移動可能となるように構成する。また、斜め部材31Lb,32Lb,33Lbと斜め部材31Lc,32Lc,33Lcとをそれぞれ連結する回転軸31Ld,32Ld,33Ldの位置を、斜め部材31Lc,32Lc,33Lcについてのみ部材の長手方向に沿って下端部方向に移動可能にする(通常は、回転軸31Ld,32Ld,33Ldの位置は固定とする)。これにより、斜め部材31Lc,32Lc,33Lcの下端部を移動させ、斜め部材31Lc,32Lc,33Lcの回転軸31Ld,32Ld,33Ldの位置を下げることにより、景品フィールド16Lを前方が低くなるように傾斜させることができる。この場合も前述のように、例えば管理者(あるいはプレーヤ)により傾斜方向(前傾斜、後傾斜)をボタン操作等によって指示できるようにすることで、景品フィールド16Lを前傾斜あるいは後傾斜させることができる。
【0146】
なお、景品フィールド16Lを傾斜させるための構成は、前述した構成に限るものではなく、例えば水平部材31La,32La,33Laを個別に傾斜できるようにしたり、上下機構が設けられた基台全体を傾斜させるように構成することもできる。
【0147】
こうして、景品フィールド16Lを傾斜させることができるようにして、例えば景品落とし口の位置に合わせて景品フィールド16Lを傾斜させて、景品を獲得し易くすることができる。例えば、景品フィールド16Lの左側に景品落とし口が設けられている場合には、景品フィールド16Lの右側が高くなるように傾斜させることで、景品が景品落とし口に落下し易い印象をプレーヤに与えることができる。同様にして、景品フィールド16Lの前方(手前側)に景品落とし口が設けられている場合には、景品フィールド16Lの後側が高くなるように傾斜させることで、景品が景品落とし口に落下し易い印象をプレーヤに与えることができる。また、左右傾斜と前後傾斜とを組み合わせることも可能である。
【0148】
景品フィールド16Lを傾斜させる構成とした場合、前述した上下機構の動作モード「フリー2」において、例えば1プレイにおいて景品フィールド16Lを傾斜させる指示を1回できるものとする。そして、クレジットの残りがある場合には、景品フィールド16Lの傾斜状態を維持し、次のプレイにおいてさらに傾斜をするように指示できるようにする。すなわち、連続プレイによって景品フィールド16Lの傾斜角度を大きくできるようにして、景品フィールド16Lに載置された景品を景品落とし口に落下させやすい印象をプレーヤに与えることができる。これにより、連続したクレーンゲーム装置10の利用をプレーヤに促すことが可能となる。
【0149】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0150】
10…クレーンゲーム機、12…上部筐体、13…下部筐体、15…透明板、16L,16R…景品フィールド、18L,18R…クレーンアーム、21L,21R…景品取出口、23L,23R…コンパネ部、24L,24R…ボタン、26L,26R…コイン投入口、31L、30L…駆動ユニット、33Lh,33Lh…スライドユニット、35La,35Lb…補助スプリングユニット、45…フィールドモータ、61a,61b…ナット、62a,62b…台形ネジシャフト。
【技術分野】
【0001】
本発明は、フィールドに景品等の物品が載置されるクレーンゲーム装置等のゲーム装置に関する。
【背景技術】
【0002】
クレーンゲーム装置等のゲーム装置では、フィールド内に複数の景品が載置される。プレーヤは、ボタンなどを操作することによりクレーンアームの動きを制御して、景品が載置された位置まで移動させた後、景品を掴む、倒す、引き摺るといった動作をさせて景品を景品落とし口まで導くことにより、景品を獲得することができる。
【0003】
従来では、プレーヤのゲームへの挑戦意欲を向上させるために、景品が載置されるゲームフィールドの形態を変形できる構成が考えられている。例えば、特許文献1に記載されたクレーンゲーム機では、景品載置面(ゲームフィールド)の高さや傾斜角度を、電動等の昇降装置により変更可能にする機構が設けられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−201952号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術では、景品載置面(ゲームフィールド)の高さ等を電動等の昇降装置により変更することで、景品載置面に載置された景品の姿勢を変化させてキャッチャーにより景品を掴みやすくしている。しかしながら、従来技術では、キャッチャーの操作を開始する前、すなわちゲームを開始する前に景品載置面の高さを変動させるだけで、ゲーム開始後は通常のゲームと変わらなかった。
【0006】
本発明は前述した事情に考慮してなされたもので、その目的は、景品が載置されるフィールドの高さをゲーム中に変動させることで変化のあるゲームを実現できるゲーム装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、景品が載置されるフィールドと、前記フィールドを上下動させる上下機構と、前記景品を把持する機構を有する把持手段と、前記把持手段の動きを制御するための指示を入力する第1の入力手段と、前記第1の入力手段による入力が可能な期間に、前記上下機構により前記フィールドを上下動させる制御手段とを具備したことを特徴とする。
【発明の効果】
【0008】
本発明によれば、景品が載置されるフィールドの高さをゲーム中に変動させることで変化のあるゲームを実現できる。
【図面の簡単な説明】
【0009】
【図1】本実施形態におけるゲーム装置の外観構成を示す斜視図。
【図2】本実施形態におけるゲーム装置の正面図。
【図3】本実施形態におけるクレーンゲーム装置10の右側ユニット10R側から見た側面図。
【図4】クレーンゲーム装置10の筐体内部の詳細な構成を示すために上部筐体12を取り除いて示す図。
【図5】左側ユニット10Lに実装される上下機構の構成の詳細を示す図。
【図6】左側ユニット10Lに実装される上下機構の構成の詳細を示す図。
【図7】駆動ユニット30Lの詳細な構成を示す図。
【図8】図7中に示す範囲Aの駆動部の詳細な構成を示す斜視図。
【図9】図8に示す駆動部のフィールドモータ45の出力軸方向から見た図。
【図10】図7に示すスライドユニット31Lh,33Lhの内部構成を示す図。
【図11】図7に示すスライドユニット31Lh,33Lhの内部構成を示す図。
【図12】図11中に示す範囲Bの詳細な構成を示す斜視図。
【図13】図12に示すA−A線における断面図。
【図14】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
【図15】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
【図16】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
【図17】駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図。
【図18】景品フィールド16Lが最下位置(初期位置)から押し上げられる時の補助スプリングユニット35Laの変化を示す図。
【図19】補助スプリングユニット35La,35Lbとフィールドモータ45による景品フィールド16Lを上下動させる力関係を示す図。
【図20】本実施形態におけるクレーンゲーム装置10の機能構成を示すブロック図。
【図21】上下機構に対する各種設定をするためのフィールド設定処理について示すフローチャート。
【図22】高さ設定用の画面の表示例を示す図。
【図23】デモ設定用の画面の表示例を示す図。
【図24】ゲーム設定用の画面の表示例を示す図。
【図25】プレーヤの操作により実行されるゲーム処理について示すフローチャート。
【図26】プレーヤの操作により実行されるゲーム処理について示すフローチャート。
【図27】ゲーム中にプレーヤの操作によって景品フィールド16Lの高さを調整できる動作モード「フリー2」のフローチャート。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態について説明する。
図1は、本実施形態におけるゲーム装置の外観構成を示す斜視図、図2は、本実施形態におけるゲーム装置の正面図である。本実施形態のゲーム装置として、プレーヤの操作に応じてクレーンアームを制御して、景品を払い出すように動作するクレーンゲーム装置10を例に示す。
【0011】
図1及び図2に示すクレーンゲーム装置10は、上部筐体12と下部筐体13とから構成されている。上部筐体12は、前面と側面の一部がアクリル板などの透明板15(開閉部材)により覆われており、透明板15を通じて筐体内部の景品フィールド16L,16Rが視認できるようになっている。透明板15は、例えば正面側が開閉可能に構成されており、景品フィールド16L,16Rへの景品の入れ替えや補充、景品フィールド16L,16Rの高さを調整する場合等に開放することができる。
【0012】
本実施形態におけるクレーンゲーム装置10は、同時に2人のプレーヤがゲームを実施することができるように、2つのゲームユニット(左側ユニット10L、右側ユニット10R)が搭載されている。左側ユニット10Lと右側ユニット10Rとは、基本的に、中央の境界線において左右対称に構成されているものとする。2つのゲームユニットの景品フィールド16L,16Rは、仕切板(図示せず)によって区分されている。仕切板により区分された2つの景品フィールド16L,16Rには、それぞれ景品を積載することができる。
【0013】
本実施形態におけるクレーンゲーム装置10では、景品フィールド16L,16Rのそれぞれについて、個別に高さを変更することができる上下機構(詳細については後述する)が設けられている。図1及び図2において、右側ユニット10Rは、最下位置(初期位置)に景品フィールド16Rが設定され、左側ユニット10Lは、初期位置より高い位置に景品フィールド16Lが設定されている状態を示している。
【0014】
また、景品フィールド16L,16Rは、例えば景品落とし口が形成されたパネルをフレームに脱着可能となっており、異なる種類のパネルに交換することにより景品落とし口の大きさ、形状等を変更することができる。例えば、図1に示す例では、景品フィールド16Lの左側半分と景品フィールド16Rの右側半分のそれぞれの位置にパネルを装着することができる。パネルには、例えば1つ、または複数の景品落とし口が形成される。パネルの種類によって、それぞれに形成された景品落とし口の形状が異なっている。景品落とし口以外の部分は、景品を載置することができる平面部となる。なお、景品フィールド16Lの右側半分、景品フィールド16Rの左側半分については平面部材が固定されているものとする。図1に示す例では、景品フィールド16Lには、左手前側に景品落とし口が形成されたパネルが装着された例を示している。また、景品フィールド16Rには、右手前側に景品落とし口が形成されたパネルが装着された例を示している。
【0015】
景品フィールド16Lの左側半分(パネル装着範囲)の下方部と景品フィールド16Rの右側半分(パネル装着範囲)の下方部のそれぞれには、景品フィールド16L,16Rから落下した景品を、下部筐体13の前面側に設けられた景品取出口21L,21Rに誘導するための景品誘導空間が設けられている。また、景品誘導空間には、奥側を高く、手前側を低くした傾斜面を設けている。傾斜面を設けることにより、景品落とし口から落下した景品が傾斜面に衝突し、景品取出口21L,21Rが設けられた下部筐体13の前面側に落下し易くなる。これにより、景品取出口21L,21Rから景品を取りやすくなる。なお、傾斜面は、景品誘導空間内の高い位置と低い位置に設けることができる。
【0016】
例えば、景品フィールド16L,16Rから落下した景品が景品誘導空間の奥に転がっていっても、低い位置にも傾斜面を設けることで、景品を景品取出口21L,21Rから取り出しやすい開口部側に戻ってくるようにしている。特に、低い位置の傾斜面と景品誘導空間の底部(水平面)とをR形状(曲線形状)で繋ぐことにより、奥に転がった景品を滑らかに手前側に転がるようにようにできる。また、高い位置の傾斜面を例えば透明なアクリル板などにより形成して上部から景品誘導空間内を確認できるようにしている。アクリル板は、脱着可能な構成とすることで、景品の落下などで傷ついたような場合に交換することができる。また、景品フィールド16L,16Rに載置された景品のサイズが比較的大きい場合には、高い位置の傾斜面のアクリル板を取り外して低い位置の傾斜面に景品が落下するようにしても良い。これにより、サイズの大きい景品についても、景品取出口21L,21Rの開口部近くにまで転がり出るようにできる。
【0017】
なお、左右の景品フィールド16L,16Rの上方には、プレーヤ操作に応じて動作が制御されるクレーンアーム(キャッチャー)18L,18Rが装着されている(図2参照。図1では景品フィールド16L,16Rを見やすくするために図示を省略している)。上部筐体12内の景品フィールド16L,16Rの上方には、それぞれクレーンアーム18L,18Rを、例えばX軸方向、Y軸方向、及びZ軸方向(上下方向)に移動させるためのクレーン機構部(図示せず)が設けられている。クレーン機構部は、例えば、コンパネ部23L,23Rに設けられた複数のボタン24L,24R(例えば、横移動ボタン、縦移動ボタン、降下ボタン、高さ調整ボタン)へのプレーヤ操作に応じて制御される。なお、コンパネ部23L,23Rには、ボタンだけでなく、プレーヤにより上下左右の方向を指示できるジョイスティックなどの入力デバイスを設けた構成としても良い。
【0018】
クレーンアーム18L,18Rの先端部には、景品を把持するための2本のアーム18La,18Ra(把持爪)が設けられている(なお、3本あるいは4本のアームを設けても良い)。アーム18La,18Raは、クレーンアーム18が下降されて景品に到達した位置で、閉じる(物を把持する)ように動作が制御される。
【0019】
また、上部筐体12の奥面には、景品ディスプレイ用のネットや景品を引っかけることができるフックを取り付け可能にしている。ネットやフックは、例えば奥面上部において水平方向に配設されたレールに取り付けられるようにして、レールに沿って左右方向に移動可能にする。ネットやフックを利用して景品を展示することで、ユーザにクレーンゲーム装置10の利用をアピールすることができる。
【0020】
下部筐体13の正面側には、景品取出口21L,21R、フロントメンテドア22、プレーヤによって操作が行われるコンパネ(コントロールパネル)部23L,23Rが設けられている。
景品取出口21L,21Rは、筐体内(景品フィールド)から景品を外部に取り出すためのもので、景品フィールド16L,16Rの下方部に設けられた景品誘導空間と連通している。クレーンアーム18L,18Rを操作して景品を景品落とし口に落下させることにより、景品取出口21L,21Rから景品を取り出すことができる。
【0021】
フロントメンテドア22は、下部筐体13の内部に収容された制御ユニット(制御PCB(Print Circuit Board))やその他の機構部に対して作業をするような場合に、管理者によって開放させることができる(鍵付き)。また、フロントメンテドア22の内部には、収納スペースが設けられており、補充用の景品などを収容しておくことができる。
【0022】
コンパネ部23L,23Rには、クレーンアーム18L,18Rを動作させるためにプレーヤにより操作される複数のボタン24L,24Rの他、コインが投入されるコイン投入口26L,26R、プレイ料金や投入されたコインに応じた残りプレイ回数を表示するための表示装置27L,27R(例えば7セグ表示器)等が設けられている。また、ゲーム実行中の効果音や音楽、メッセージ音声などを出力するためのスピーカ28が設けられている。
【0023】
また、本実施形態におけるクレーンゲーム装置10には、管理者がクレーンゲーム装置10に対して各種設定をするための設定機器(図20に示す設定機器29)が設けられている。設定機器は、クレーンゲーム装置10の本体筐体から着脱可能な可搬型に構成されている。設定機器は、各種設定のための操作をする場合には、収納部から取り出して、クレーンゲーム装置10と近接した位置で手に保持した状態で取り扱うことができる。設定機器は、クレーンゲーム装置10の筐体内に収納された制御ユニットと、例えばケーブルや無線通信(無線LAN(Local Area Network)など)によって接続される。設定機器は、左側ユニット10Lと右側ユニット10Rのそれぞれに対する各種設定を個別にすることができるものとする。
【0024】
図3は、本実施形態におけるクレーンゲーム装置10の右側ユニット10R側から見た側面図である。
図3に示すように、景品フィールド16Lは、上下機構によって、景品フィールド16Rよりも高い位置に設定されている。景品フィールド16L,16Rは、上下機構により個別に高さを調整できるため、異なる高さに設定された場合であっても、フィールド上に載置された景品が落下しないようにするためのガード板16La,16Raが、景品フィールド16L,16Rのそれぞれの端部にほぼ垂直に装着されている。
【0025】
図2や図3に示すように、景品フィールド16L,16Rの高さを変えることにより、景品フィールド16L,16Rとクレーンアーム18L,18Rとの距離が変化するため、景品フィールド16L,16Rの高さに応じて景品フィールド16L,16Rに対するZ軸方向(上下方向)の駆動制御が実行される。
【0026】
図4は、クレーンゲーム装置10の筐体内部の詳細な構成を示すために上部筐体12を取り除いて示す図である。
図4において、左側ユニット10Lは上下機構が装着された状態の構成を示し、右側ユニット10Rは上下機構を除いた状態の構成を示している。なお、右側ユニット10Rには、左側ユニット10Lに装着された上下機構と左右対称の位置に各部材が配置された上下機構が装着されるものとして詳細な説明を省略する。
【0027】
左側ユニット10Lに設けられた上下機構には、景品フィールド16Lを下部から支持すると共に景品フィールド16Lの高さを変更させる部材として3つのX部材31L,32L,33Lが、所定の間隔で長手方向が平行となるように配置されている。X部材31L,33Lは、左側ユニット10Lの左右端近傍に配置され、X部材32Lは、左側ユニット10Lのほぼ中央に配置されている。
【0028】
X部材31L,32Lが配設された間には、X部材31L,32L,33Lにより景品フィールド16Lを上下動させる駆動ユニット30Lが配置されている。X部材32L,33Lが配置された間には、景品誘導空間36Lが設けられており、景品フィールド16Lに形成された景品落とし口から落下された景品が、景品取出口21Lまで通過可能となっている。景品誘導空間36Lには、景品フィールド16Lから落下された景品が衝突するように、クレーンゲーム装置10の前面側に傾斜した傾斜面37Lが形成されている。傾斜面37Lは、例えば透明のアクリル板が脱着可能となっており、景品の落下などで傷ついたような場合に交換することができる。
【0029】
右側ユニット10Rにおいても、左側ユニット10Lと同様にして、景品誘導空間36Rに傾斜面37Rが設けられている。
【0030】
また、X部材32Lの近傍には、駆動ユニット30Lによる景品フィールド16Lの押し上げを補助するための補助スプリングユニット35La,35Lbが設けられている。補助スプリングユニット35La,35Lbは、景品フィールド16Lが最下位置近くにある時に、景品フィールド16Lの底部を支持すると共に、スプリングによる反発力により景品フィールド16Lを上方向へ押し上げるように作用する。補助スプリングユニット35Laは、クレーンゲーム装置10の前側に配置され、補助スプリングユニット35Lbは、クレーンゲーム装置10の後側に配置されている。なお、補助スプリングユニット35La,35Lbの作用効果の詳細については、図13〜図18を参照しながら説明する。
【0031】
なお、本実施形態のクレーンゲーム装置10では、左側ユニット10Lにおいて2つの補助スプリングユニット35La,35Lbが設けられているが、1つの補助スプリングユニットのみとしても良いし、3つ以上の補助スプリングユニットを設ける構成としても良い。補助スプリングユニットの個々の強さや個数は、駆動ユニット30Lによる景品フィールド16Lを押し上げる性能に応じて決定されるものとする。
【0032】
図5及び図6は、左側ユニット10Lに実装される上下機構の構成の詳細を示す図である。図6は、図5中に示す駆動ユニット30Lのカバーを取り外して、駆動ユニット30Lの内部構造を示している。図5及び図6に示すように、上下機構は、各ユニットが基台上に取り付けられている。
【0033】
X部材31Lは、水平部材31La、2本の斜め部材31Lb,31Lcにより構成されている。水平部材31Laは、景品フィールド16Lの底部に取り付けられる。斜め部材31Lb,31Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸31Ldにより連結され、回動可能になっている。
【0034】
斜め部材31Lbの上端部は、水平部材31Laの一方の端部近傍に設けられた回転軸31Leにおいて回動可能となるように取り付けられている。斜め部材31Lcの上端部は、水平部材31Laの他方の端部側に取り付けられたスライド機構31Lfによって、水平部材31Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0035】
斜め部材31Lbの下端部は、図6に示すように、X部材32Lの斜め部材32Lbの下端部と連結され、駆動ユニット30Lによって水平方向に移動可能となっている(詳細については図7参照)。斜め部材31Lcの下端部は、基台上に設けられた回転軸31Lgにおいて回動可能となるように取り付けられている。
【0036】
X部材32Lは、水平部材32La、2本の斜め部材32Lb,32Lcにより構成されている。水平部材32Laは、景品フィールド16Lの底部に取り付けられる。斜め部材32Lb,32Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸32Ldにより連結され、回動可能になっている。
【0037】
斜め部材32Lbの上端部は、水平部材32Laの一方の端部近傍に設けられた回転軸32Leにおいて回動可能となるように取り付けられている。斜め部材32Lcの上端部は、水平部材32Laの他方の端部側に取り付けられたスライド機構によって、水平部材32Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0038】
斜め部材32Lbの下端部は、図6に示すように、X部材31Lの斜め部材31Lbの下端部と連結され、駆動ユニット30Lによって水平方向に移動可能となっている(詳細については図7参照)。斜め部材32Lcの下端部は、基台上に設けられた回転軸32Lgにおいて回動可能となるように取り付けられている。
【0039】
X部材31Lの斜め部材31LbとX部材32Lの斜め部材32Lbは下端部において連結されて、この下端部がスライドユニット31Lhによって同時に水平方向に移動される。
【0040】
X部材33Lは、水平部材33La、2本の斜め部材33Lb,33Lcにより構成されている。水平部材33Laは、景品フィールド16Lの底部に取り付けられる。斜め部材33Lb,33Lcは、ほぼ同じ長さで構成され、それぞれの長手方向の中央部で回転軸33Ldにより連結され、回動可能になっている。
【0041】
斜め部材33Lbの上端部は、水平部材33Laの一方の端部近傍に設けられた回転軸33Leにおいて回動可能となるように取り付けられている。斜め部材33Lcの上端部は、水平部材33Laの他方の端部側に取り付けられたスライド機構によって、水平部材33Laに沿って所定の範囲内でスライド可能となるように取り付けられている。
【0042】
斜め部材33Lbの下端部は、図6に示すように、スライドユニット33Lhによって水平方向に移動可能となっている。斜め部材33Lcの下端部は、基台上に設けられた回転軸33Lgにおいて回動可能となるように取り付けられている。スライドユニット33Lhは、スライドユニット31Lhと連動して、駆動ユニット30Lからの駆動力が伝達されて斜め部材33Lbの下端部を水平方向に移動させる。
【0043】
図5及び図6に示すように、X部材31Lは、斜め部材31Lbの上端部が回転軸31Leによって水平部材31Laの固定位置に取り付けられ、斜め部材31Lcの下端部が回転軸31Lgによって基台の固定位置に取り付けられている。斜め部材31Lcの上端部は、スライド機構31Lfによってスライド可能となっている。従って、斜め部材31Lbの下端部を駆動ユニット30L(スライドユニット31Lh)によって水平方向に移動させることにより、斜め部材31Lb,31Lcは、回転軸31Ldにおいて回動し、水平部材31Laを水平にしたまま上下動させることができる。X部材32Lは、X部材31Lと連結されているために水平部材31Laと連動して、水平部材32Laを上下動させる。また、スライドユニット33Lhとスライドユニット31Lhとが連動しているため、X部材33Lは、X部材31L,32Lと連動して水平部材33Laを水平にしたまま上下動させる。
【0044】
なお、図5及び図6に示すように、上下機構は、景品フィールド16Lの下部に全て収容されている。このため、景品フィールド16Lを広く使用することができる。また、景品フィールド16Lの上方に機構部がないことから見栄えも良く、景品フィールド16Lに景品を展示する際の妨げとならない。
【0045】
図7は、駆動ユニット30Lの詳細な構成を示す図である。図7では、駆動ユニット30Lを覆うカバーを取り外した状態を示している。
図7に示すように、X部材31Lの斜め部材31Lbとの下端部とX部材32Lの斜め部材32Lbとの下端部とは、連結部材40を介して連結されている。連結部材40の一端には、斜め部材31Lbの下端部が回転軸41Lによって回動可能に取り付けられ、連結部材40の他端には、斜め部材32Lbの下端部が回転軸42Lによって回動可能に取り付けられている。
【0046】
スライドユニット31Lhには、連結部材40に固定されたスライダブロック(図10、図11参照)が収容されている。連結部材40は、スライダブロックがスライドユニット31Lhの内部において、フィールドモータ45の駆動力により水平方向に移動させることにより、斜め部材31Lb,32Lbの下端部を水平方向に移動させる。なお、フィールドモータ45は、景品フィールド16Lを上下動させるための駆動力を供給するための駆動源である。
【0047】
スライドユニット31Lhの上部には、上部リミットセンサ43と下部リミットセンサ44とが両端部の近傍に設けられている。上部リミットセンサ43は、景品フィールド16Lの高さの上限を判別するためのセンサ、下部リミットセンサ44は、景品フィールド16Lの高さの下限を判別するためのセンサである。スライドユニット31Lhの上部には、長手方向に沿ってスリットが設けられており、スライドユニット31Lhに収容されたナット(後述する)に設けられた板部材が突出している。上部リミットセンサ43と下部リミットセンサ44は、この板部材の通過を検出する。なお、詳細については、図10〜図12を参照しながら説明する。フィールドモータ45は、上部リミットセンサ43あるいは下部リミットセンサ44により板部材の通過が検出されると動作が停止するように制御される。
【0048】
また、スライドユニット31Lhの側面に、長手方向に沿ってスリットが設けられており、スライドユニット31Lhに収容されたスライダブロック(後述する)に設けられた板部材が突出している。スライダブロックに設けられた板部材の通過は、下部リミットセンサ44の近傍に設けられたスライドセンサ(図示せず)により検出される。
【0049】
スライドユニット31Lhに収容された台形ネジシャフト(詳細については後述する)に取り付けられたプーリ46と、スライドユニット33Lhに収容された台形ネジシャフト(詳細については後述する)に取り付けられたプーリ47には、フィールドモータ45による駆動力を伝達するためのベルト48が架設されている。プーリ46は、フィールドモータ45の駆動によって回転される。従って、1つのフィールドモータ45の駆動によって、スライドユニット31Lh,33Lhを連動して動かして、景品フィールド16Lの上下動を調整することができる。
【0050】
本実施形態の上下機構では、スライドユニット31Lhにより連結部材40を水平方向に移動させ、X部材31L,32L,33Lを介して景品フィールド16Lを上下動させる構造となっている。このため上下機構がコンパクトになり、機構全体を景品フィールド16Lの下部に収納可能となっている。
【0051】
図8は、図7中に示す範囲Aの駆動部の詳細な構成を示す斜視図、図9は、図8に示す駆動部のフィールドモータ45の出力軸方向から見た図である。
図8に示すように、フィールドモータ45の出力軸は、支持部材50aによって軸支されている。フィールドモータ45の出力軸は、支持部材50aを貫通し、ギア52及びパルスカム53が取り付けられている。ギア52及びパルスカム53は、フィールドモータ45が駆動されることにより回転する。また、スライドユニット31Lhに収容された台形ネジシャフトの端部は、支持部材50aによって軸支されている。台形ネジシャフトの端部は、支持部材50aを貫通し、ギア54及びプーリ46が同軸に取り付けられている。図9に示すように、ギア52とギア54とは係合されており、フィールドモータ45が駆動されることによりギア52が回転されると、ギア54を介してスライドユニット31Lh内の台形ネジシャフトと共にプーリ46が回転される。
【0052】
また、支持部材50aには、パルスカム53の回転を検知するためのパルスカムセンサ55,56が取り付けられている。パルスカムセンサ55,56は、パルスカム53の通過を検出することにより、フィールドモータ45の回転数と回転方向を検出するためのものである。フィールドモータ45の回転数と回転方向を検出することにより、景品フィールド16Lの高さ(上下の位置)を算出することができる。
【0053】
パルスカムセンサ55は、パルスカム53に対して上に配設され、パルスカムセンサ56は、パルスカム53に対して横に配設されている。パルスカム53の外周には、例えば4つの突起部と切りかけ部が交互に設けられている。従って、パルスカムセンサ55,56は、パルスカム53が1回転される間に、オン(突起部の通過を検出)とオフ(切りかけ部の通過を検出)を繰り返して検出する。ただし、パルスカムセンサ55,56によるオン(突起部の通過を検出)のタイミングが異なるように、パルスカムセンサ55,56の配置とパルスカム53の形状が決められている。例えば、パルスカム53が右回転(時計回り)する場合には、パルスカムセンサ55,56によるパルスカム53の検出は、例えばオン/オン、オン/オフ、オフ/オフ、オフ/オン,オン/オン…のように変化し、パルスカム53が左回転する場合には、オン/オフ、オン/オン、オフ/オン、オフ/オフ,オン/オフ…のように変化する。このパルスカムセンサ55,56の検出変化をもとに、フィールドモータ45の回転方向、すなわち景品フィールド16Lを上方向に移動させているか、あるいは下方向に移動させているかを判別することができる。また、パルスカムセンサ55,56の少なくとも何れか一方によるオン検出の回数をもとにして、フィールドモータ45の回転量を検出することができ、このフィールドモータ45の回転量をもとにして景品フィールド16Lの位置(高さ)を算出することができる。
【0054】
図10及び図11は、図7に示すスライドユニット31Lh,33Lhの内部構成を示す図、図12は、図11中に示す範囲Bの詳細な構成を示す斜視図である。図10は、通常の状態を示し、図11及び図12は、安全機構が働いた状態を示している。
【0055】
スライドユニット31Lh内では、支持部材50aと支持部材50bとの間に、台形ネジシャフト62aが軸支されている。台形ネジシャフト62aには、ナット61aが螺合されている。従って、台形ネジシャフト62aがフィールドモータ45の動力が伝達されて回転されると、ナット61aは、台形ネジシャフト62aに沿って移動する。また、台形ネジシャフト62aは、連結部材40に取り付けられたスライダブロック60aの貫通孔60a1に貫通している。
【0056】
図13は、図12に示すA−A線における断面図を示している。図13に示すように、台形ネジシャフト62aと貫通孔60a1とは螺合されていないため、スライダブロック60aは、台形ネジシャフト62aの回転に関係無く、台形ネジシャフト62aに沿って移動することができる。図11〜図13に示すように、スライダブロック60aとナット61aとを固定しない構成とすることで、上下機構の可動範囲に障害物等があった場合であっても故障等を発生させないようにする安全機構として機能させることができる。
【0057】
通常、スライダブロック60aは、図10に示すように、ナット61aに設けられたフランジ61a1に圧接された状態となっている。すなわち、景品フィールド16L自体の重さや景品フィールド16Lに載置された景品の重さによってX部材31L,32Lが押し下げられ、連結部材40をナット61aの方向に移動させるように荷重がかかる。このため、連結部材40に設けられたスライダブロック60aは、ナット61aに押しつけられた状態となる。従って、フィールドモータ45の駆動力により台形ネジシャフト62aを回転させ、ナット61aをスライダブロック60a側に移動させると、ナット61aに圧接された状態のスライダブロック60aが荷重に反して移動して、連結部材40及びX部材31L,32Lを介して景品フィールド16Lを押し上げる。また、フィールドモータ45を逆回転させることにより台形ネジシャフト62aを回転させ、ナット61aを支持部材50a側に移動させると、スライダブロック60aがナット61aに圧接された状態のまま移動して景品フィールド16Lを押し下げる。
【0058】
台形ネジシャフト62aとナット61aとは、台形ねじにより螺合されているため安定して位置を固定することができ、景品フィールド16Lに多数の景品が載置されて重量が増した場合であっても安定して高さを維持(固定)することができる。
【0059】
なお、スライダブロック60aとナット61aのフランジ61a1とが圧接される場合、図12に示すような、スライダブロック60aのフランジ61a1との対向面に設けられた複数(図12では4つ)の穴60a2に、フランジ61a1のスライダブロック60aとの対向面に設けられた複数(図12では4つ)の突起部61a3が挿入される。このため、台形ネジシャフト62aの軸と交差する方向に負荷が掛かる場合であっても、スライダブロック60aとナット61a(フランジ61a1)とが結合された状態を安定に保つため、他の部材に余分な負荷が掛からず故障などを回避することができる。
【0060】
なお、図12に示すフランジ61a1の上部に設けられた板部材61a2は、スライドユニット31Lhの上部に設けられたスリットから突出される。板部材61a2は、上部リミットセンサ43と下部リミットセンサ44によって検出される。台形ネジシャフト62aの回転によってフランジ61a1が下部リミットセンサ44の位置まで到達したことが検出されると、景品フィールド16Lが最下位置まで下がったことが判別できるためフィールドモータ45の駆動が停止される。同様にして、台形ネジシャフト62aの回転によってフランジ61a1が上部リミットセンサ43の位置まで到達したことが検出されると、景品フィールド16Lが最上位置まで上がったことが判別できるためフィールドモータ45の駆動が停止される。
【0061】
また、図12に示すように、スライダブロック60aの側面には、板部材60a3が設けられている。板部材60a3は、スライドユニット31Lhの側面に設けられたスリットから突出しており、スライダブロック60aの移動に伴って移動する。スライダブロック60aは、スライドユニット31Lhの近傍に設けられたスライドセンサ(図20に示すスライドセンサ85)によって検出される。スライドセンサは、例えばナット61aとスライダブロック60aとが圧接された状態で移動し、ナット61a(板部材61a2)が下部リミットセンサ44によって検出される位置まで移動した時に、板部材60a3を検出する位置に設けられている。すなわち、スライダブロック60aに設けられた板部材60a3をスライドセンサにより検出することで、ナット61a(板部材61a2)を下部リミットセンサ44により検出される位置まで移動させることで、正常に景品フィールド16Lが最下位置まで移動されたことを判別することができる。もし、ナット61a(板部材61a2)を下部リミットセンサ44により検出される位置まで移動させても、スライドセンサにより板部材60a3を検出できなかった場合には、可動範囲に障害物などがあるために安全機構が働いて、景品フィールド16Lが最下位置まで降下していないと判別できる。
【0062】
なお、スライドユニット33Lhは、前述したスライドユニット31Lhと同様の部材が収納されている。すなわち、図10及び図11に示すように、スライドユニット33Lh内では、2つの支持部材51aの間に、台形ネジシャフト62bが軸支されている。台形ネジシャフト62bには、ナット61bが螺合されている。従って、ベルト48、プーリ47を介してフィールドモータ45の動力が伝達されて台形ネジシャフト62bが回転されると、ナット61bは、台形ネジシャフト62bに沿って移動する。これにより、ナット61bに圧接された状態にあるスライダブロック60bは、スライダブロック60bに沿って移動し、スライドユニット31Lh側と連動して、景品フィールド16Lを上昇あるいは下降させる。
【0063】
通常の状態では、図10に示すように、景品フィールド16L自体の重さや景品フィールド16Lに載置された景品の重さによって、スライダブロック60a,60bを、ナット61a,61bに圧接させるように荷重がかかっている。上下機構は、例えば管理者が透明板15を開放して、景品フィールド16L,16Rへの景品の入れ替えや補充をする際に、景品のサイズ等に合わせて景品フィールド16L,16Rの高さを調整する場合等に使用される。管理者がこうした作業をしている間に、例えば、X部材31L,32L,33L等の構造部材の可動範囲に景品等が落下したり、管理者が誤って手を可動範囲に入れてしまうおそれがある。
【0064】
本実施形態における上下機構では、可動範囲に景品等の障害物があった状態で、景品フィールド16Lを下降させるようフィールドモータ45を駆動し、ナット61aを下部リミットセンサ44が設けられた側に移動させた場合、図11〜図13に示すように、ナット61aとスライダブロック60aとが離間する。すなわち、可動範囲に障害物があって景品フィールド16Lが下降できない状態にある場合には、安全機構が機能して、フィールドモータ45による駆動力により強制的に景品フィールド16Lを下降させることがない。このため、障害物があっても構造部材やフィールドモータ45に想定外の負荷を与えてしまうこともないため故障等を招かないですむ。また、障害物(景品や管理者の手など)に対するフィールドモータ45による過剰な負荷も発生させないため安全性も確保できる。
【0065】
こうした場合、ナット61aが景品フィールド16Lを最下位置にする位置まで移動されて下部リミットセンサ44により検出されても、スライダブロック60aがナット61aと離間して停止しているためスライドセンサによる検出がない。従って、下部リミットセンサ44とスライドセンサによる検出状態をもとにして、障害物等により景品フィールド16Lが正常に下降されていないことを判別し、例えば警報等を出力することができる。
【0066】
次に、補助スプリングユニット35La,35Lbによる作用効果について説明する。図14、図15、図16、及び図17は、駆動ユニット30Lにより景品フィールド16Lを上方向に移動させた場合の変化を示す図である。
図14は、景品フィールド16Lが最下位置(初期位置)にある状態を示している。駆動ユニット30Lは、景品フィールド16Lの上昇が指示されると、フィールドモータ45を駆動する。図14あるいは図15に示すように、景品フィールド16Lが最下位置近くにある時には、補助スプリングユニット35La,35Lbによって景品フィールド16Lの底部が支持されている。補助スプリングユニット35La,35Lbは、スプリングによる反発力により景品フィールド16Lを上方向へ押し上げるように作用しているため、駆動ユニット30Lによる押し上げを補助する。
【0067】
図16及び図17に示すように、景品フィールド16Lの底部から補助スプリングユニット35La,35Lbが離間すると、駆動ユニット30Lによる駆動力のみによって景品フィールド16Lが上昇される。
【0068】
本実施形態におけるクレーンゲーム装置10では、図7に示すように、連結部材40を水平方向に移動させることにより、X部材31L,32L,33Lを介して、景品フィールド16Lを垂直方向に移動させる。こうした、X部材31L,32L,33Lを介して景品フィールド16Lを上方向に移動させる構造では、機構全体をコンパクトにできる一方、最下位置(初期位置)にある景品フィールド16Lを上昇させる際に最も大きな力を必要とする。
【0069】
本実施形態におけるクレーンゲーム装置10では、補助スプリングユニット35La,35Lbを設けて、最も大きな力を必要とする景品フィールド16Lが最下位置近傍にある時の押し上げを補助するようにしたので、強力な駆動力を有する高価なフィールドモータを用いたり、複数のフィールドモータを用いることなく、1つのフィールドモータ45により景品フィールド16Lの初期位置からの押し上げを実現している。
【0070】
図18(a)(b)(c)は、景品フィールド16Lが最下位置(初期位置)から押し上げられる時の補助スプリングユニット35Laの変化を示す図である。なお、景品フィールド16Lは、水平に上下動される構成であるので、補助スプリングユニット35Lbも同様に変化する。
【0071】
補助スプリングユニット35Laは、図18(a)〜(c)に示すように、外筐体35aに内筐体35bが上下動可能となるように内挿されている。外筐体35aと内筐体35bの内部には、伸縮可能な弾性部材としてスプリング35cが収容されている。内筐体35bの上端部には、景品フィールド16Lの底部と接触するゴム等による緩衝部材35dが設けられている。
【0072】
補助スプリングユニット35Laは、景品フィールド16Lと接触していない場合には、図18(c)に示すように、スプリング35cが伸張した状態にあり、内筐体35bを外部に押し上げている。
【0073】
フィールドモータ45が駆動されておらず景品フィールド16Lが最下位置にある場合には、図18(a)に示すように、スプリング35cが圧縮されて、内筐体35bが外筐体35aに押し込まれた状態となる。すなわち、補助スプリングユニット35La(及び補助スプリングユニット35Lb)のみでは、景品フィールド16Lを押し上げることはできない。
【0074】
図19は、補助スプリングユニット35La,35Lbとフィールドモータ45による景品フィールド16Lを上下動させる力関係を示す図である。
図19に示す例では、例えば補助スプリングユニット35La(35Lb)は、景品フィールド16Lの高さが0〜50mmの範囲にある時に、景品フィールド16Lの底部に接触しており、スプリング35cの作用により景品フィールド16Lを押し上げている。
【0075】
図18(a)の状態において、フィールドモータ45が駆動されると、フィールドモータ45による動力に加えて、図18(b)に示すように補助スプリングユニット35La(35Lb)による押し上げ力が補助(付加)されるため、景品フィールド16Lを押し上げることができる。補助スプリングユニット35La(35Lb)による押し上げ力は、図18(c)に示すように、スプリング35cが伸びきるまで加えられる。
【0076】
フィールドモータ45は、図19に示すように、景品フィールド16Lの高さが50mmに到達する前、例えば40mm程度になると補助スプリングユニット35La(35Lb)による補助なして景品フィールド16Lを押し上げることができる。従って、補助スプリングユニット35La(35Lb)による補助を景品フィールド16Lが50mmになるまで加えることにより、景品フィールド16Lを初期位置から50mmを越えるまでスムーズに押し上げることが可能となる。
【0077】
なお、前述した説明では、景品フィールド16L,16Rの押し上げを補助するために補助スプリングユニット35La,35Lbを設ける構成としているが、他の補助ユニットを設ける構成としても良い。例えば、スプリング以外の弾性部材、例えばゴムなどを用いても良い。また、弾性部材を用いたユニットだけでなく、他の油圧や磁力などを利用して押し上げ力を供給できる補助ユニットとすることも可能である。
【0078】
また、景品フィールド16Lが初期位置近くにある時に押し上げを補助できれば良いため、前述したように景品フィールド16Lの底部より上方向に押し上げるように補助するだけでなく、例えば、連結部材40を水平方向に移動させるように補助する補助ユニットを設けるようにしても良い。例えば、景品フィールド16Lが最下位置にある時の連結部材40を、上部リミットセンサ43の方向に水平に引っ張るように作用するスプリング等の弾性部材を有する補助ユニットを設けることも可能である。前述と同様に、弾性部材以外によって動力を供給するユニットとしても良い。
【0079】
また、前述した説明では、スライドユニット31Lh,33Lhに収容された台形ネジシャフト62a,62bを回転させることでナット61a,61bを移動させ、スライダブロック60a,60b(連結部材40)の位置を調整しているが、他の機構によって連結部材40を水平方向に移動させるようにしても良い。例えば、台形ネジシャフト62a,62bに替えてスライドレールに沿って連結部材40を水平に移動可能に構成することも可能である。スライドレールを用いた場合、連結部材40を移動させる動力として、例えばモータや磁力などを使用することが可能である。
【0080】
図20は、本実施形態におけるクレーンゲーム装置10の機能構成を示すブロック図である。
図20に示すように、クレーンゲーム装置10の筐体内部には、各種ユニットが実装された制御PCB(Print Circuit Board)68が設けられている。制御PCB68に実装されたユニットには、CPU70、RAM71、記憶装置72、入出力処理ユニット73、X軸モータ駆動部74、Y軸モータ駆動部75、Z軸モータ駆動部76、アーム駆動部77、及びフィールドモータ駆動部78を含む。
【0081】
CPU70は、RAM71あるいは記憶装置72に記憶された制御プログラムやゲームプログラムを実行することにより、クレーンゲーム装置10全体を制御する。CPU70は、入出力処理ユニット73を介して入力されるコイン投入の検知信号に応じて、プレイ可能回数を示すクレジットデータをRAM71に記録する。また、CPU70は、入出力処理ユニット73を介して入力されるユーザ操作により指示されたクレーンアーム18L,18Rを移動させる指示に応じて、X軸モータ駆動部74、Y軸モータ駆動部75、Z軸モータ駆動部76、及びアーム駆動部77を制御して機構部69の各部を適宜動作させる。また、CPU70は、入出力処理ユニット73を介して入力されるユーザ操作により指示された景品フィールド16L,16Rを上下動させる指示に応じて、フィールドモータ駆動部78を制御して上下機構(フィールドモータ45)を適宜動作させる。また、CPU70は、入出力処理ユニット73を介して、スピーカ28からの音声出力、表示装置27L,27Rにおける表示を制御する。
【0082】
RAM71は、制御プログラムやゲームプログラム等の各種プログラムの他、CPU70により実行される処理に伴うゲームを制御するための各種データを一時的に記憶する。RAM71に記録されるデータには、例えばプレイ可能回数を示すクレジットデータ、クレーンアーム18L,18Rの位置(X位置、Y位置)を示す位置データ等が含まれる。
【0083】
記憶装置72は、ROMやハードディスク等の不揮発性の記憶媒体にプログラムやデータを記憶する。
入出力処理ユニット73は、制御PCB68の外部に設けられた各種入出力デバイスとのインタフェースである。
X軸モータ駆動部74は、機構部69に設けられたX軸モータ80の駆動を制御する。
【0084】
Y軸モータ駆動部75は、機構部69に設けられたY軸モータ81の駆動を制御する。
【0085】
Z軸モータ駆動部76は、機構部69に設けられたZ軸モータ82の駆動を制御する。
【0086】
アーム駆動部77は、クレーンアーム18L,18Rに設けられたアーム18La,18Raを開閉させるためのアームモータ83の駆動を制御する。
【0087】
フィールドモータ駆動部78は、CPU70の制御のもとで、景品フィールド16L,16Rを上下動させる動力源とするフィールドモータ45の駆動を制御する。
【0088】
機構部69は、例えば左側ユニット10Lと右側ユニット10Rのそれぞれに設けられる。機構部69は、図20に示すように、X軸モータ80、Y軸モータ81、Z軸モータ82、アームモータ83、景品検知センサ85、上部リミットセンサ43、下部リミットセンサ44、フィールドモータ45、パルスカムセンサ55、パルスカムセンサ56、及びスライドセンサ84が含まれる。
X軸モータ80は、X軸モータ駆動部74により駆動されるもので、クレーンアーム18L,18RをX軸方向(横方向)に移動させる。
Y軸モータ81は、Y軸モータ駆動部75により駆動されるもので、クレーンアーム18L,18RをY軸方向(縦方向)に移動させる。
Z軸モータ82は、Z軸モータ駆動部76により駆動されるもので、クレーンアーム18L,18RをZ軸方向(上下方向)に移動させる。
アームモータ83は、アーム駆動部77により駆動されるもので、クレーンアーム18L,18Rのアーム18La,18Raを開閉させる。
【0089】
景品検知センサ84は、クレーンアーム18L,18Rの操作によりプレーヤに景品が払い出されたことを検知する。
【0090】
コンパネ部23Lには、図20に示すように、コイン投入口26L、コイン投入センサ86、横移動ボタン24La、縦移動ボタン24Lb、降下ボタン24Lc、高さ調整ボタン24Ld、及び表示装置27Lが含まれる。なお、コンパネ部23Rは、コンパネ部23Lと同様に構成されるものとして説明を省略する。
コイン投入センサ86は、コイン投入口26Lから投入されたコインを検知して、入出力処理ユニット73に、コイン投入を示す検知信号を出力する。CPU70は、入出力処理ユニット73に入力された検知信号に応じて、プレイ可能回数を示すクレジットデータを記録する。
【0091】
横移動ボタン24Laは、プレーヤによるクレーンアーム18Lを横方向(X軸方向)に移動させる指示を入力するためのものである。横移動ボタン24Laは、プレーヤにより押下されている場合、押下された状態にあることを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて横移動ボタン24Laが押下されていることを検知すると、X軸モータ駆動部74を介してX軸モータ80を駆動してクレーンアーム18Lを横方向(X軸方向)に移動させる。CPU70は、横移動ボタン24Laが押されていない場合には、X軸モータ80の駆動を停止させる。
【0092】
縦移動ボタン24Lbは、プレーヤによるクレーンアーム18Lを縦方向(Y軸方向)に移動させる指示を入力するためのものである。縦移動ボタン24Lbは、プレーヤにより押下されている場合、押下された状態にあることを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて縦移動ボタン24Lbが押下されていることを検知すると、Y軸モータ駆動部75を介してY軸モータ81を駆動してクレーンアーム18Lを縦方向(Y軸方向)に移動させる。CPU70は、縦移動ボタン24Lbが押されていない場合には、Y軸モータ81の駆動を停止させる。
【0093】
降下ボタン24Lcは、プレーヤによるクレーンアーム18Lに対して景品取得シーケンスを開始させる指示を入力ためのものである。降下ボタン24Lcは、プレーヤにより押下されると、押下されたことを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて降下ボタン24Lcが押下されたことを検知すると、景品取得シーケンスとして、Z軸モータ駆動部76を介してクレーンアーム18Lの先端部が景品に到達する位置まで下降させ、アーム駆動部77を通じてアーム18Laに景品を掴む動作をさせた後、クレーンアーム18Lを上昇させる。
【0094】
高さ調整ボタン24Ldは、プレーヤにより景品フィールドの高さを調整できる上下機構の動作モード(後述する「ノーマル」)が設定されている場合に、プレーヤから景品フィールドの高さ調整の指示を入力するためのものである。高さ調整ボタン24Ldは、プレーヤに押下されることにより、押下されたことを示す信号を入出力処理ユニット73に出力する。CPU70は、入出力処理ユニット73を通じて高さ調整ボタン24Ldが押下されていることを検知すると、フィールドモータ駆動部78を介してフィールドモータ45を駆動して景品フィールド16Lを上下動させる。
【0095】
表示装置27Lは、CPU70の制御のもとで各種の情報を表示する。表示装置27Lには、例えばクレジット数(プレイ可能回数)や動作モードの表示などが表示される。また、表示装置27Lには、上下機構の動作モードがゲーム処理中に景品フィールド16Lを上下動させる設定となっている場合に、プレーヤに景品フィールド16Lが上下動することを通知するためのメッセージを表示する。例えば、プレーヤにより景品フィールドの高さを調整できる上下機構の動作モード(後述する「ノーマル」)が設定されている場合には、高さ調整ボタン24Ldを操作することで景品フィールド16Lの高さを変更できることを通知するメッセージを表示する。
【0096】
なお、設定機器29は、管理者がクレーンゲーム装置10に対して各種設定をするために使用されるもので、例えば各種の設定操作を入力するための複数のボタン(選択ボタン、決定ボタン、上下左右ボタン等)、各種設定画面等を表示するためのディスプレイ等が実装されている。なお、コンパネ部23L,23Rに設けられたボタン24と表示装置27L,27Rを用いて設定操作するようにしても良い。
【0097】
次に、本実施形態におけるクレーンゲーム装置10の上下機構に関係する動作について説明する。
まず、上下機構に対する各種設定をするためのフィールド設定処理について、図21に示すフローチャートを参照しながら説明する。フィールド設定処理は、例えばクレーンゲーム装置10の管理者が設定機器29を用いて行われるもので、例えば左側ユニット10Lと右側ユニット10R(景品フィールド16L,16Rに対する上下機構)について、個別に高さ設定、デモ設定、ゲーム設定をすることができる。ここでは、左側ユニット10Lの上下機構について設定を行うものとして説明する。
【0098】
まず、設定機器29の操作によってフィールド設定処理の起動が指示されると、CPU70は、設定機器29のディスプレイに設定対象項目メニュー(高さ設定、デモ設定、ゲーム設定)を表示させる。
【0099】
ここで、高さ設定が選択されると(ステップA1、Yes)、CPU70は、例えば図22に示すような高さ設定用の画面を表示させると共に、設定対象とする景品フィールド16Lの高さ上限または下限(上または下)の指定を入力する(ステップA2)。ここで、例えば高さ上限(上)が指示され、選択ボタンにより景品フィールド16Lの移動が指示されると、CPU70は、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動する(ステップA4)。CPU70は、選択ボタンが押されている間、上下機構を駆動して景品フィールド16Lを移動させる。
【0100】
CPU70は、入出力処理ユニット73を通じて入力されるパルスカムセンサ55,56の検出結果をもとに景品フィールド16Lの現在の高さを算出し、図22に示す高さ設定用の画面中の高さを表す数字と、高さを表現するイメージを更新する(ステップA5)。CPU70は、選択ボタンが押下されている間、景品フィールド16Lを移動可能な上限と下限の間で往復移動させる(ステップA4〜A6)。
【0101】
管理者は、景品フィールド16Lが希望する高さにまで移動されたタイミングに合わせて選択ボタンの押下を終了する。選択ボタンの押下が終了されると(ステップA6、Yes)、CPU70は、上下機構の駆動を停止させる(ステップA7)。
【0102】
ここで、前述と同様にして、高さ下限(下)が指示され、選択ボタンにより景品フィールド16Lの移動が指示されると、景品フィールド16Lを移動させて、管理者が希望する高さで停止させる(ステップA2〜A7)。
【0103】
こうして、景品フィールド16Lの高さ上限と下限の位置が指定され、決定ボタンが押下されると(ステップA8、Yes)、CPU70は、景品フィールド16Lの高さ上限と下限を示すデータを、例えば記憶装置72に記録する。
【0104】
ここで設定された景品フィールド16Lの上限と下限は、後述する動作モード「ノーマル」において、景品フィールド16Lの移動可能範囲を示す。また、景品フィールド16Lの上限は、後述する動作モード「固定」において、景品フィールド16Lの高さを示す。
【0105】
次に、設定対象項目メニューにおいて、デモ設定が選択されると(ステップA10、Yes)、CPU70は、例えば図23に示すようなデモ設定用の画面を表示させる。デモ設定用の画面では、現在の設定状態(オンまたはオフ)を表示する。ここで、選択ボタンが押下されると(ステップA11、Yes)、CPU70は、デモ動作中の上下機構のオン/オフを切り替える(ステップA12)。例えば現在の設定状態が「オン」であった場合には「オフ」に切り替え、現在の設定状態が「オフ」であった場合には「オン」に切り替える。
【0106】
こうして、デモ動作中の上下機構の「オン」または「オフ」が指定され、決定ボタンが押下されると(ステップA13、Yes)、CPU70は、デモ動作中の上下機構の「オン」あるいは「オフ」を示すデータを、例えば記憶装置72に記録する(ステップA14)。
【0107】
ここで設定された上下機構のオン/オフは、クレーンゲーム装置10がプレーヤにより利用されていない時に実行されるデモ動作において参照される。上下機構「オン」が設定された場合には、デモ動作中において、インターバルを挟みながら景品フィールド16Lを上下移動させる。これにより、プレーヤに対してクレーンゲーム装置10をアピールし、クレーンゲーム装置10の利用を促すことができる。
【0108】
次に、設定対象項目メニューにおいて、ゲーム設定が選択されると(ステップA15、Yes)、CPU70は、例えば図24に示すようなゲーム設定用の画面を表示させる。ゲーム設定用の画面では、現在の上下機構の動作モード(図24では「ノーマル」)を表示する。本実施形態におけるクレーンゲーム装置10では、上下機構の動作モードとして例えば「ノーマル」「固定」「フリー」が用意されている。「ノーマル」は、ゲーム中は常に景品フィールド16Lを上限と下限との間で上下動させるモードである。「固定」は、指定した高さ(高さ設定により設定された上限の高さ)で景品フィールド16Lを停止させるモードである。「フリー」は、プレーヤがゲーム開始前にプレーヤが高さを変更できるようにするモードである。
【0109】
ここで、選択ボタンが押下されると(ステップA16、Yes)、CPU70は、動作モードを「ノーマル」「固定」「フリー」の順に切り替える(ステップA17)。例えば現在の動作モードが「ノーマル」であった場合には「固定」に切り替え、「固定」であった場合には「フリー」に切り替え、「フリー」であった場合には「ノーマル」に切り替える。
【0110】
こうして、上下機構の動作モードが指定され、決定ボタンが押下されると(ステップA18、Yes)、CPU70は、上下機構の動作モードを示すデータを、例えば記憶装置72に記録する(ステップA19)。
【0111】
ここで設定された上下機構の動作モードは、クレーンゲーム装置10がプレーヤにより利用される場合のゲーム処理を制御するために参照される。
【0112】
フィールド設定処理では、前述したように高さ設定、デモ設定、ゲーム設定のそれぞれについて、管理者が任意に設定することができる(ステップA1〜A19)。処理の終了が指示されると、CPU70は、フィールド設定処理を終了する。
【0113】
次に、プレーヤの操作により実行されるゲーム処理について、図25及び図26に示すフローチャートを参照しながら説明する。ゲーム処理では、前述したフィールド設定処理による設定内容に応じて上下機構が制御される。
【0114】
まず、クレーンゲーム装置10をプレイするために、プレーヤによりコイン投入口26Lからコインが投入される。コイン投入センサ86は、コインが投入されたことを検知すると入出力処理ユニット73に検知信号を出力する。CPU70は、コイン投入センサ86からの検知信号によりコイン投入を検知すると(ステップB1)、プレイ可能回数を示すクレジット数を加算し、その値を示すクレジットデータをRAM71に記録する(ステップB2)。ここで、複数のプレイ回数分のコインが投入された場合には、複数回分のプレイ可能回数を示すクレジットデータを記録する。CPU70は、クレジットデータの記録に応じて、例えば表示装置27Lにプレイ可能回数(クレジット数)を表示させる。
【0115】
CPU70は、現在の上下機構の動作モードを判別し(ステップB3)、動作モードに応じた制御を開始する。ここで、動作モードが「ノーマル」に設定されている場合(ステップB4、Yes)、CPU70は、ゲーム中(ボタンに対する入力操作が可能な期間)に景品フィールド16Lが上下動することをプレーヤに通知するためのメッセージを出力する(ステップB5)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0116】
CPU70は、フィールド設定処理の高さ設定において指定された高さの上限と下限を示すデータを読み出し、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動して、景品フィールド16Lを上限と下限の範囲で往復移動させる。CPU70は、入出力処理ユニット73を通じて入力されるパルスカムセンサ55,56による検出結果をもとに景品フィールド16Lの現在の高さを算出し、上限あるいは下限に到達したと判別された場合に、フィールドモータ45の回転方向を逆転させることで、景品フィールド16Lを範囲内で往復移動させる。
【0117】
プレーヤは、景品フィールド16Lが上下動されている間に、景品フィールド16Lに載置された景品を取得できるようにクレーンアーム18Lを操作する。
【0118】
CPU70は、横移動ボタン24Laあるいは縦移動ボタン24Lbの操作により、クレーンアーム18Lを横/縦移動させる指示があると(ステップB7、Yes)、入力操作に応じて、クレーンアーム18Lを移動させるためのモータを駆動して、クレーンアーム18Lを移動させる。すなわち、CPU70は、横移動ボタン24Laが操作された場合には、X軸モータ駆動部74を通じてX軸モータ80を駆動して、クレーンアーム18Lを横方向(X軸方向)に移動させる。また、CPU70は、縦移動ボタン24Lbが操作された場合には、Y軸モータ駆動部75を通じてY軸モータ81を駆動して、クレーンアーム18Lを縦方向(Y軸方向)に移動させる。
【0119】
また、降下ボタン24Lcの押下が検知された場合(ステップB9、Yes)、CPU70は、景品取得シーケンスによりクレーンアーム18Lを下降させる前に上下機構の駆動を停止する(ステップB10)。すなわち、上下機構により景品フィールド16Lが上昇されている場合にクレーンアーム18Lを下降させると、クレーンアーム18Lが景品フィールド16Lあるいは景品フィールド16Lに載置された景品と強く衝突して破壊してしまうおそれがあるため、景品フィールド16Lの上下動を停止させた後、CPU70は、クレーンアーム18Lに対して景品取得シーケンスによる制御を行う(ステップB11)。
【0120】
景品取得シーケンスでは、CPU70は、Z軸モータ駆動部76を介してクレーンアーム18Lの先端部が景品に到達する位置まで下降させ、アーム駆動部77を通じてアーム18Laに景品を掴む動作をさせた後、クレーンアーム18Lを上昇させる。そして、クレーンアーム18Lを景品落とし口の上方まで移動させてからアーム18Laに景品を離す動作をさせた後、初期位置に移動させる。
【0121】
なお、前述したように、降下ボタン24Lcの押下が検知された場合に、直ちに上下機構の駆動を停止させるのではなく、降下ボタン24Lcの押下に応じて景品取得シーケンス(クレーンアーム18Lの下降)を開始すると共に上下機構の駆動を継続しても良い。この場合、CPU70は、動作中の景品フィールド16Lとクレーンアーム18Lの現在の高さを算出して、両者の高さをもとにして衝突する前に上下機構の駆動を停止させる。
【0122】
景品取得シーケンスが終了すると(ステップB12、Yes)、CPU70は、上下機構を駆動して景品フィールド16Lを初期位置に戻す(ステップB13)。
【0123】
CPU70は、クレジット(プレイ可能回数)の残りがある場合(ステップB36、Yes)、クレジットを減算してプレイ可能回数を−1した後、次のプレイ状態に移行する(ステップB3〜)。一方、クレジット(プレイ可能回数)の残りがない場合(ステップB36、No)、CPU70は、ゲーム処理を終了する。
【0124】
このように、動作モード「ノーマル」では、景品フィールド16Lが上下動している間にクレーンアーム18Lを操作するため、高さが固定されている場合より変化を楽しむことができる。
【0125】
一方、動作モードが「固定」に設定されている場合(ステップB14、Yes)、CPU70は、景品フィールド16Lの高さを変更することをプレーヤに通知するためのメッセージを出力する(ステップB15)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0126】
CPU70は、フィールド設定処理の高さ設定において指定された高さの上限を示すデータを読み出し、フィールドモータ駆動部78を通じて上下機構(フィールドモータ45)を駆動して、景品フィールド16Lを上限まで移動させる(ステップB16)。すなわち、動作モード「固定」では、管理者がフィールド設定処理において設定された高さ上限に景品フィールド16Lの高さを調整した後に、ゲームを開始する。以下、クレーンアーム18Lに対する制御については(ステップB17〜B21)、前述した動作モード「ノーマル」と同様に実行されるものとして詳細な説明を省略する。ただし、動作モード「固定」では、ゲーム中に景品フィールド16Lが上下動していないので、景品フィールド16Lを降下させる指示があった場合に(ステップB19)、上下機構の駆動を停止させる処理(ステップB10)は実行しない。
【0127】
CPU70は、景品取得シーケンスを実行した後、上下機構を駆動して、景品フィールド16Lを初期位置に戻す(ステップB22)。また、クレジットの残りがある場合には(ステップB36、Yes)、前述と同様の処理を繰り返して実行する。
【0128】
このように、動作モード「固定」では、景品フィールド16Lを予め決めた高さに調整した後にゲームを開始させるので、景品フィールド16Lに載置された景品の大きさ等に応じた高さ調整をすることができる。
【0129】
また、動作モードが「フリー」に設定されている場合(ステップB23、Yes)、CPU70は、景品フィールド16Lの高さをプレーヤの操作により変更できることをプレーヤに通知するためのメッセージを出力する(ステップB24)。メッセージは、例えば表示装置27Lにおいて表示したり、スピーカ28を通じて音声により出力したりすることができる(少なくとも何れか一方)。
【0130】
景品フィールド16Lの高さ調整は、予め決められた制限時間内で実行されるものとする。このため、CPU70は、制限時間の経過を判別するために時間計測を開始する(ステップB25)。
【0131】
ここで、高さ調整ボタン24Ldの入力操作によって景品フィールド16Lの高さ変更が指示されると(ステップB26、Yes)、CPU70は、入力操作に応じて上下機構を駆動して、景品フィールド16Lを上下動させる(ステップB27)。例えば、CPU70は、高さ調整ボタン24Ldが押下されている間、上下機能を駆動して、景品フィールド16Lを上限と下限との間で往復移動させる。プレーヤは、希望する高さに景品フィールド16Lがある時に高さ調整ボタン24Ldを離すことで、景品フィールド16Lの位置決めをすることができる。この景品フィールド16Lの位置決めは、制限時間内であれば繰り返して実行することができる(ステップB29)。
【0132】
CPU70は、制限時間が経過した場合(ステップB29、Yes)、あるいは景品フィールド16Lの位置決めが決定し、例えば高さ調整ボタン24Ld以外のボタン(例えば横移動ボタン24La)の操作により決定が指示されると(ステップB28、Yes)、景品フィールド16Lを調整後の高さに固定してゲームを開始する。
【0133】
以下、クレーンアーム18Lに対する制御については(ステップB30〜B35)、前述した動作モード「固定」と同様に実行されるものとして詳細な説明を省略する。
【0134】
このように、動作モード「フリー」では、プレーヤがゲーム開始前に任意に景品フィールド16Lの高さを調整した後にゲームを開始することができる。従って、景品フィールド16Lに載置された景品に応じて、クレーンアーム18Lによって獲得し易いように景品フィールド16Lの高さを調整できる。例えば、小さな景品の場合には、景品フィールド16Lを高くすることで、クレーンアーム18Lと景品との距離を短くして、クレーンアーム18Lによって狙いやすくすることができる。
【0135】
なお、前述した動作モード「フリー」の場合では、ゲーム開始前にプレーヤが景品フィールド16Lの高さを調整できるようにしているが、ゲーム中(クレーンアーム18の移動を制御するための入力操作が可能な期間)にプレーヤの操作によって景品フィールド16Lの高さを調整できるようにしても良い。
【0136】
図27は、ゲーム中にプレーヤの操作によって景品フィールド16Lの高さを調整できる動作モード「フリー2」のフローチャートである。
この場合、CPU70は、ゲーム中に高さ調整ボタン24Ldの操作によって景品フィールド16Lの高さを変更できることをプレーヤに通知するためのメッセージを出力する(ステップC1)。
【0137】
CPU70は、横移動ボタン24Laあるいは縦移動ボタン24Lbの操作により、クレーンアーム18Lを横/縦移動させる指示があると(ステップC2、Yes)、入力操作に応じて、クレーンアーム18Lを移動させるためのモータを駆動して、クレーンアーム18Lを移動させる(ステップC3)。すなわち、CPU70は、横移動ボタン24Laが操作された場合には、X軸モータ駆動部74を通じてX軸モータ80を駆動して、クレーンアーム18Lを横方向(X軸方向)に移動させる。また、CPU70は、縦移動ボタン24Lbが操作された場合には、Y軸モータ駆動部75を通じてY軸モータ81を駆動して、クレーンアーム18Lを縦方向(Y軸方向)に移動させる。
【0138】
また、CPU70は、高さ調整ボタン24Ldの操作によって景品フィールド16Lの高さを変更する指示が入力されると(ステップC4、Yes)、上下機構を駆動して景品フィールド16Lの高さを変更する(ステップC5)。
【0139】
すなわち、プレーヤは、クレーンアーム18Lの縦横方向の移動操作と、景品フィールド16Lを上下動させる操作を組み合わせて、目的とする景品をクレーンアーム18Lによって獲得できるように調整することができる(ステップC2〜C5)。プレーヤは、クレーンアーム18Lの位置と景品フィールド16Lの高さを調整した後、降下ボタン24Lcによりクレーンアーム18Lの降下を指示する。
【0140】
降下ボタン24Lcの押下が検知された場合(ステップC6、Yes)、CPU70は、クレーンアーム18Lに対して前述と同様にして景品取得シーケンスによる制御を行う(ステップC7)。
【0141】
景品取得シーケンスが終了すると(ステップC8、Yes)、CPU70は、クレジット(プレイ可能回数)の残りがある場合(ステップC9、Yes)、クレジットを減算してプレイ可能回数を−1した後、次のプレイ状態に移行する。一方、クレジット(プレイ可能回数)の残りがない場合(ステップC9、No)、CPU70は、上下機構を駆動して景品フィールド16Lを初期位置に戻す(ステップC10)。
【0142】
すなわち、上下機構の動作モード「フリー2」の場合には、1プレイが終了した後、クレジットが残っていれば景品フィールド16Lを初期位置に戻さない。これにより、高さ調整ボタン24Ldの操作により高さを調整した景品フィールド16Lのまま、次のプレイを継続できるので、同じ高さ調整を繰り返して実行する必要が無く、また前回のプレイを参考に高さの微調整なども容易に実行できる。
【0143】
このように、動作モード「フリー2」では、ゲーム中にプレーヤが景品フィールド16Lの高さを調整することができるので、クレーンアーム18Lに対する操作と組み合わせて新たな景品取得の方法を試すことができ、プレーヤに興味を持たせることができる。
【0144】
なお、前述した上下機構では、景品フィールド16Lを水平にしたまま上下動させているが、景品フィールド16Lを傾斜させるように高さ調整できるようにしても良い。例えば、図5に示す上下機構の構成において、X部材31L,32L,33Lの高さを個別に調整できるようにすることで、景品フィールド16Lを左右に傾斜させることができる。X部材31L,32L,33Lの高さを個別に調整するために、例えば少なくとも両端のX部材31L,33Lに対応するフィールドモータを設け、個々にフィールドモータを制御して、前述したようにX部材31L,33Lにより景品フィールド16Lの高さを変更する。この場合、例えば管理者(あるいはプレーヤ)により傾斜方向(右傾斜、左傾斜)をボタン操作等によって指示できるようにすることで、X部材31L,33Lによる高さ調整を個々に変えることで景品フィールド16Lを右傾斜あるいは左傾斜させることができる。
【0145】
また、景品フィールド16Lを左右に傾斜させるだけでなく前後に傾斜させるようにしても良い。例えば、図5に示す上下機構の構成において、斜め部材31Lc,32Lc,33Lcの下端部を固定位置で回動するように取り付けているが、斜め部材31Lc,32Lc,33Lcの下端部についても斜め部材31Lb,32Lb,33Lbと同様にして水平方向に移動可能となるように構成する。また、斜め部材31Lb,32Lb,33Lbと斜め部材31Lc,32Lc,33Lcとをそれぞれ連結する回転軸31Ld,32Ld,33Ldの位置を、斜め部材31Lc,32Lc,33Lcについてのみ部材の長手方向に沿って下端部方向に移動可能にする(通常は、回転軸31Ld,32Ld,33Ldの位置は固定とする)。これにより、斜め部材31Lc,32Lc,33Lcの下端部を移動させ、斜め部材31Lc,32Lc,33Lcの回転軸31Ld,32Ld,33Ldの位置を下げることにより、景品フィールド16Lを前方が低くなるように傾斜させることができる。この場合も前述のように、例えば管理者(あるいはプレーヤ)により傾斜方向(前傾斜、後傾斜)をボタン操作等によって指示できるようにすることで、景品フィールド16Lを前傾斜あるいは後傾斜させることができる。
【0146】
なお、景品フィールド16Lを傾斜させるための構成は、前述した構成に限るものではなく、例えば水平部材31La,32La,33Laを個別に傾斜できるようにしたり、上下機構が設けられた基台全体を傾斜させるように構成することもできる。
【0147】
こうして、景品フィールド16Lを傾斜させることができるようにして、例えば景品落とし口の位置に合わせて景品フィールド16Lを傾斜させて、景品を獲得し易くすることができる。例えば、景品フィールド16Lの左側に景品落とし口が設けられている場合には、景品フィールド16Lの右側が高くなるように傾斜させることで、景品が景品落とし口に落下し易い印象をプレーヤに与えることができる。同様にして、景品フィールド16Lの前方(手前側)に景品落とし口が設けられている場合には、景品フィールド16Lの後側が高くなるように傾斜させることで、景品が景品落とし口に落下し易い印象をプレーヤに与えることができる。また、左右傾斜と前後傾斜とを組み合わせることも可能である。
【0148】
景品フィールド16Lを傾斜させる構成とした場合、前述した上下機構の動作モード「フリー2」において、例えば1プレイにおいて景品フィールド16Lを傾斜させる指示を1回できるものとする。そして、クレジットの残りがある場合には、景品フィールド16Lの傾斜状態を維持し、次のプレイにおいてさらに傾斜をするように指示できるようにする。すなわち、連続プレイによって景品フィールド16Lの傾斜角度を大きくできるようにして、景品フィールド16Lに載置された景品を景品落とし口に落下させやすい印象をプレーヤに与えることができる。これにより、連続したクレーンゲーム装置10の利用をプレーヤに促すことが可能となる。
【0149】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0150】
10…クレーンゲーム機、12…上部筐体、13…下部筐体、15…透明板、16L,16R…景品フィールド、18L,18R…クレーンアーム、21L,21R…景品取出口、23L,23R…コンパネ部、24L,24R…ボタン、26L,26R…コイン投入口、31L、30L…駆動ユニット、33Lh,33Lh…スライドユニット、35La,35Lb…補助スプリングユニット、45…フィールドモータ、61a,61b…ナット、62a,62b…台形ネジシャフト。
【特許請求の範囲】
【請求項1】
景品が載置されるフィールドと、
前記フィールドを上下動させる上下機構と、
前記景品を把持する機構を有する把持手段と、
前記把持手段の動きを制御するための指示を入力する第1の入力手段と、
前記第1の入力手段による入力が可能な期間に、前記上下機構により前記フィールドを上下動させる制御手段と
を具備したことを特徴とするゲーム装置。
【請求項2】
前記制御手段は、前記上下機構により予め決められた範囲内で前記フィールドを往復移動させることを特徴とする請求項1記載のゲーム装置。
【請求項3】
前記第1の入力手段により前記把持手段を下降させる指示が入力された場合に、前記制御手段は、前記上下機構による前記フィールドの上下動を停止させることを特徴とする請求項1記載のゲーム装置。
【請求項4】
前記フィールドを往復移動させる前記範囲の高さ上限と下限を設定する設定手段をさらに具備したことを特徴とする請求項2記載のゲーム装置。
【請求項5】
前記第1の入力手段による入力をしない期間に、前記上下機構により前記フィールドを上下動させるデモ制御手段をさらに具備したことを特徴とする請求項1記載のゲーム装置。
【請求項6】
前記上下機構の動きを制御するための指示を入力する第2の入力手段をさらに具備し、
前記制御手段は、前記第2の入力手段により入力された指示に応じて、前記上下機構により前記フィールドを上下動させることを特徴とする請求項1記載のゲーム装置。
【請求項7】
プレイ可能回数を記憶する記憶手段と、
前記第1の入力手段により入力された指示に応じて前記把持手段により前記景品を取得するための動作をさせた後、前記プレイ可能回数に残りがある場合に、前記第2の入力手段により入力された指示に応じて上下動させた前記フィールドの位置を維持したまま、前記第1の入力手段による入力が可能な期間に移行させるゲーム制御手段とさらに具備したことを特徴とする請求項6記載のゲーム装置。
【請求項8】
前記上下機構は、前記フィールドを傾斜させるように上下動させることを特徴とする請求項1または請求項7記載のゲーム装置。
【請求項1】
景品が載置されるフィールドと、
前記フィールドを上下動させる上下機構と、
前記景品を把持する機構を有する把持手段と、
前記把持手段の動きを制御するための指示を入力する第1の入力手段と、
前記第1の入力手段による入力が可能な期間に、前記上下機構により前記フィールドを上下動させる制御手段と
を具備したことを特徴とするゲーム装置。
【請求項2】
前記制御手段は、前記上下機構により予め決められた範囲内で前記フィールドを往復移動させることを特徴とする請求項1記載のゲーム装置。
【請求項3】
前記第1の入力手段により前記把持手段を下降させる指示が入力された場合に、前記制御手段は、前記上下機構による前記フィールドの上下動を停止させることを特徴とする請求項1記載のゲーム装置。
【請求項4】
前記フィールドを往復移動させる前記範囲の高さ上限と下限を設定する設定手段をさらに具備したことを特徴とする請求項2記載のゲーム装置。
【請求項5】
前記第1の入力手段による入力をしない期間に、前記上下機構により前記フィールドを上下動させるデモ制御手段をさらに具備したことを特徴とする請求項1記載のゲーム装置。
【請求項6】
前記上下機構の動きを制御するための指示を入力する第2の入力手段をさらに具備し、
前記制御手段は、前記第2の入力手段により入力された指示に応じて、前記上下機構により前記フィールドを上下動させることを特徴とする請求項1記載のゲーム装置。
【請求項7】
プレイ可能回数を記憶する記憶手段と、
前記第1の入力手段により入力された指示に応じて前記把持手段により前記景品を取得するための動作をさせた後、前記プレイ可能回数に残りがある場合に、前記第2の入力手段により入力された指示に応じて上下動させた前記フィールドの位置を維持したまま、前記第1の入力手段による入力が可能な期間に移行させるゲーム制御手段とさらに具備したことを特徴とする請求項6記載のゲーム装置。
【請求項8】
前記上下機構は、前記フィールドを傾斜させるように上下動させることを特徴とする請求項1または請求項7記載のゲーム装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2013−22026(P2013−22026A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−156032(P2011−156032)
【出願日】平成23年7月14日(2011.7.14)
【出願人】(310009993)株式会社タイトー (207)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月14日(2011.7.14)
【出願人】(310009993)株式会社タイトー (207)
[ Back to top ]