
コンクリート版の劣化調査システム
【課題】 本発明は舗装で覆われたコンクリート版の劣化状態の調査を短時間で、且つ、調査対象部分全体を把握して行うことができるコンクリート版の劣化調査システムを提供する。
【解決手段】 舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定する。
【解決手段】 舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は橋梁、飛行場又は港湾等に打設されているコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムに関するものである。
【背景技術】
【0002】
上記コンクリート版は経年劣化の他、雨水や融雪・凍結防止目的の塩化カルシウム等により該コンクリート版内に埋設された鉄筋が腐食し膨張して、それに伴いコンクリートの浮きや剥離が生じ予期し難い部分に劣化個所を生起する。
【0003】
又上記劣化個所が車両走行に伴う繰り返し荷重を受けると当該劣化個所のコンクリートが砂利化し劣化状態を促進する。
【0004】
上記劣化個所を放置すると、延いてはコンクリート版表面の陥没やコンクリートの剥落が生じ、特に橋梁のコンクリート版(コンクリート床版)においては、最悪の場合にはコンクリートが抜け落ちて重大な事故を引き起こす恐れがある。
【0005】
従って、上記コンクリート版表面の陥没やコンクリートの剥落を未然に防ぐために既設のコンクリート版の劣化状態を継続して調査する必要があるが、通常、コンクリート版はアスファルト・煉瓦又は土石等の舗装により表面が覆われており、表面側から劣化個所を特定することが頗る困難である。
【0006】
その為、表面を舗装で覆われたコンクリート版の劣化調査においては、上記劣化個所がコンクリートの浮き・剥離や砂利化等によりコンクリート版と舗装間に空隙を画成することに注目して、調査対象部分の舗装表面を叩いた際の打音を聞き分けて上記空隙の存在を確認することにより劣化個所を特定する打音調査が広く行われている。
【0007】
しかし、上記した打音調査では、実際に調査対象部分の舗装表面を叩かなければならず、広範囲の調査が困難であると共に、交通規制を行う必要がある。又調査作業者の能力に左右されるため、定量的な調査ができない恐れもある。
【0008】
そこで、現在では調査対象部分の舗装表面を赤外線サーモグラフィ機器で撮影して、上記劣化個所の空隙に起因する温度ムラを検知して、上記舗装表面に対非接触で劣化個所を特定する調査が試みられている。
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記した赤外線サーモグラフィ調査では、調査対象部分が広範囲に亘る場合には、舗装表面の熱画像を静止画像撮影すると、大量の静止画を撮影しなければならず煩雑な作業を強いられるという問題点を有する。又舗装表面の熱画像を動画像撮影すると、今度は撮影した動画像で劣化個所を特定しなければならず、全体を把握した正確な特定が困難であるという問題点を有する。
【0010】
又赤外線サーモグラフィ機器により舗装表面を撮影する際に、通常は、舗装表面からの放射エネルギーを軽減するために該舗装表面に正対せず一定の角度をもって撮影することとなるが、このようにして正対せず撮影した画像による劣化個所の特定は距離感がつかめず、誤特定の原因となる恐れがある。又舗装表面に歪みがある場合にも、同様な恐れがある。
【課題を解決するための手段】
【0011】
本発明は斯かる実情に鑑み開発されたもので、請求項1記載の発明は、舗装で覆われたコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムであって、上記舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定することを特徴とする。
【0012】
請求項2記載の発明は、請求項1を前提として、上記舗装表面上を走行しながら該舗装表面の可視画像を動画像撮影する第二撮影手段を備え、該撮影動画像を上記取込手段で取り込むと共に取り込んだ当該撮影動画像から上記静止画像作成手段・正対変換手段・切取手段及び合成手段により合成静止可視画像を作成して、該合成静止可視画像と上記合成静止熱画像とを対比して、コンクリート版の劣化箇所を特定することを特徴とする。
【発明の効果】
【0013】
依って、請求項1記載の発明にあっては、調査対象部分における作業としては、走行しながら第一撮影手段により調査対象部分の舗装表面の熱画像を動画像撮影するだけでよいので、調査対象部分に滞在する時間を大幅に短縮できると共に、特に交通規制を行う必要がない。
【0014】
又舗装表面に正対して撮影しなくとも正対変換手段により正対変換された合成静止熱画像に基づいて正確な劣化個所の特定ができる。
【0015】
更には、調査対象部分が広範囲であっても、合成静止熱画像で調査対象部分全体を把握して、調査対象部分の現場に即した劣化個所の特定ができる。
【0016】
請求項2記載の発明にあっては、合成静止熱画像と合成静止可視画像とを対比して劣化個所の特定ができ、特に、舗装表面上の区画線・道路標示や汚れに起因する温度ムラを除外して誤特定を防止する。
【図面の簡単な説明】
【0017】
【図1】本発明に係る劣化調査システムを概示する側面図である。
【図2】本発明に係る劣化調査システムを概示する平面図である。
【図3】連続画像合成プログラムのフローチャートである。
【図4】静止画像作成処理の説明図である。
【図5】正対変換処理の説明図である。
【図6】切取処理の説明図である。
【図7】合成処理の説明図である。
【図8】合成静止熱画像の説明図である。
【図9】合成静止可視画像の説明図である。
【発明を実施するための形態】
【0018】
以下本発明を実施するための最良の形態を図1乃至図9に基づき説明する。
【0019】
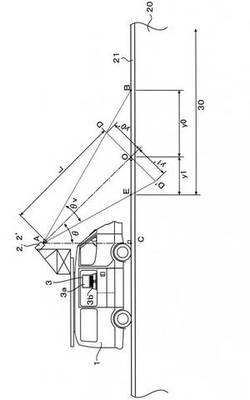
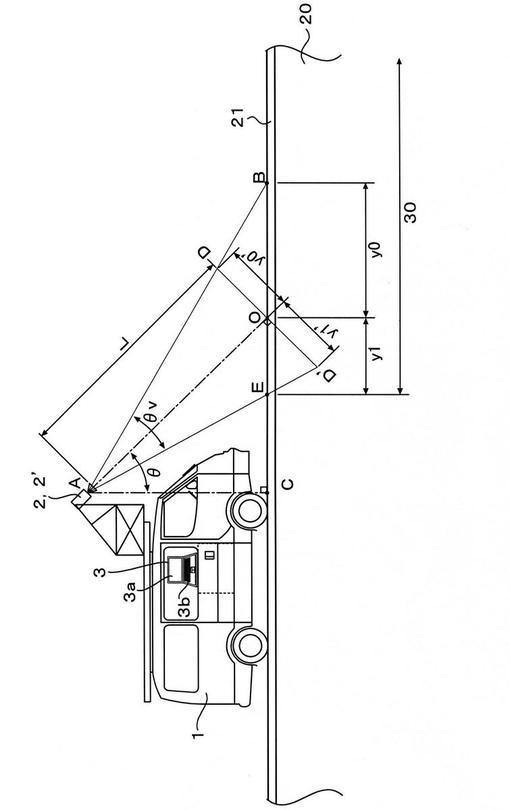
本発明は図1・図2に示す如く、例えば橋梁のコンクリート床版の如き舗装21で覆われたコンクリート版20の劣化状態を赤外線サーモグラフィにより調査するシステムであり、車両1に取り付けられて調査対象部分30の上記舗装21表面上の熱画像を撮影する赤外線カメラ(赤外線サーモグラフィ機器)2と該赤外線カメラ2で撮影した動画像を取り込むパソコン(コンピュータ)3とを備える。
【0020】
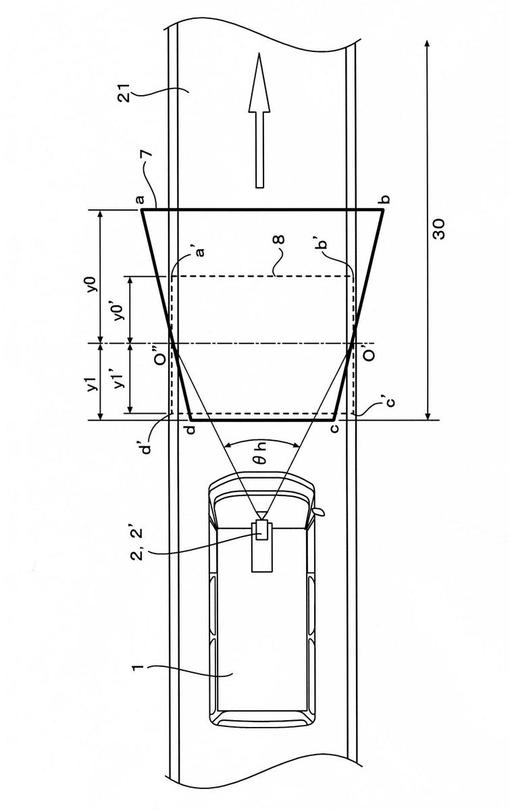
上記赤外線カメラ2は車両1の前端側上部に配置され、垂直方向(舗装21に正対する方向)に対して一定の角度θをもって取り付けられる。これにより、舗装21表面からの放射エネルギーの影響を軽減することができると共に、広範囲の撮影ができる。尚図中θvは赤外線カメラ2の垂直画角、即ち、カメラレンズの垂直方向の視野角を示し、同θhは赤外線カメラ2の水平画角、即ち、カメラレンズの水平方向の視野角を示している。
【0021】
而して、舗装21表面上を車両1で走行しながら赤外線カメラ2で調査対象部分30の上記舗装21表面の熱画像を撮影すれば、調査対象部分30における作業を終えることとなる。その為、交通規制が不要であると共に、調査対象部分30での作業を大幅に短縮することができる。
【0022】
上記のように撮影した動画像をパソコン3に取り込みハードディスクに保存する。そして、パソコン3にインストールされた既知の熱画像解析プログラムにより上記撮影動画像(熱画像)の温度分布を解析して温度ムラの強調等を行う。尚パソコン3への撮影動画像の取り込みに関しては、既知の有線形式又は無線形式のオンライン接続により赤外線カメラ2とパソコン3を接続し取り込むことができる。
【0023】
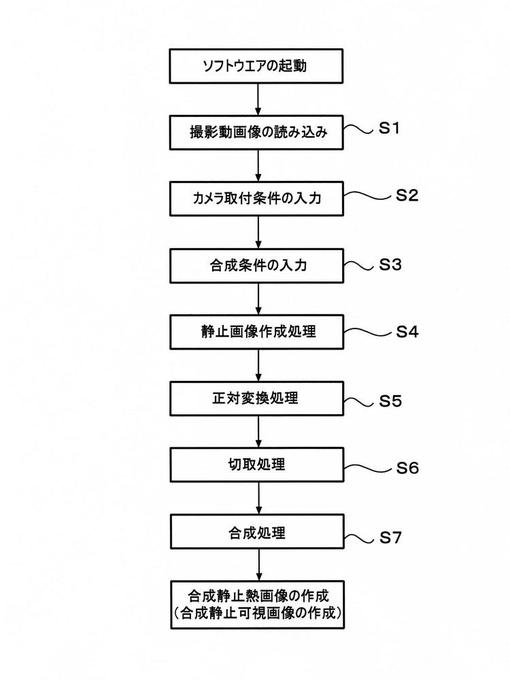
次に、上記撮影動画像から正対変換した合成静止熱画像6を作成する手順について図3のフローチャートと図4乃至図8の説明図を用いて説明する。
【0024】
まず、パソコン3にインストールされた「連続画像合成プログラム」を起動し、撮影動画像を読み込む(ステップ1)。
【0025】
続けて、パソコン3の入力部3bによりカメラ取付条件、即ち上記カメラ角度θ、垂直画角θv及び水平画角θh等を入力する(ステップ2)と共に、合成条件、即ち後述する切取幅5及び最終的に作成する合成静止熱画像6の合成範囲等の条件を入力する(ステップ3)。尚カメラレンズのアスペクト比は一定であるため、上記垂直画角θv又は水平画角θhのいずれかを入力すれば、対角の画角は確定する。
【0026】
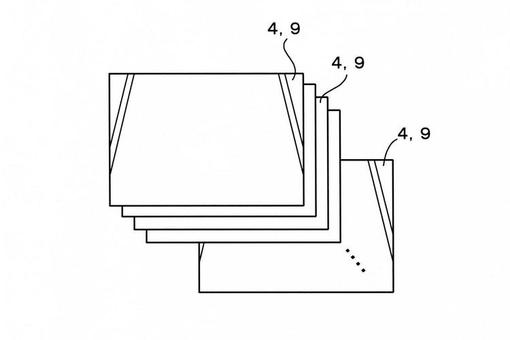
上記カメラ取付条件及び合成条件を入力すると撮影動画像を基にした合成静止熱画像6の作成が開始されるが、図4に示す如く、まず初めに上記読み込んだ撮影動画像を静止画像作成処理によりフレーム毎に静止画像に変換して連続した複数の静止画像4を作成する(ステップ4)。
【0027】
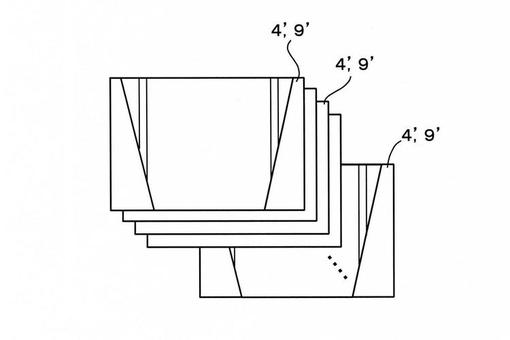
次いで、図5に示す如く、上記連続静止画像4の全てを正対変換処理し正対変換された静止画像4’を作成する(ステップ5)。ここで正対変換処理とは、一定の角度をもって撮影した実際の画像を正対して撮影したような画像へと変換する処理をいい、換言すると、図4に示す如く、斜め上方から撮影した画像はカメラに近い側は広く遠い側は狭くなっているが、これを図5に示す如く、正対して撮影(平面視)したような画像へ変換する処理をいう。
【0028】
ここで、正対変換処理の原理について図1・図2を用いて詳述する。図1中の原点Oは、赤外線カメラ2のカメラレンズ中心線と調査対象部分30の舗装21表面との交点を示し、Lは上記原点Oと赤外線カメラ2のカメラレンズとの距離を示している。又同図中の点Aは赤外線カメラ2のカメラレンズの位置、点Bは撮影範囲上限位置、点Eは同下限位置、点Cは赤外線カメラ2のカメラレンズからの垂直線と上記舗装表面21との交点、点D・D’は上記原点Oでカメラレンズ中心線と直交する線と垂直画角θvを示す線の交点を示している。
【0029】
又図2中の枠abcdで囲む範囲7は上記した条件で取付られた赤外線カメラ2で実際に撮影される範囲を平面視したものであり、正対変換処理後に得たい画像4’と一致する。他方、枠a'b'c'd'で囲む範囲8は仮に上記原点Oから距離Lを置いた位置で赤外線カメラ2で正対撮影した場合の仮撮影範囲を示している。尚直線O'O''は上記原点Oを含む水平方向の中心線を示している。
【0030】
従って、正対変換処理後に得たい画像4’と一致する上記撮影範囲7と上記仮撮影範囲8との変形率を得て、該変形率により正対変換処理を行う。
【0031】
詳述すると、上記両範囲7・8の上限と上記中心線O'O''との距離比率、同下限と上記中心線O'O''との距離比率と上記両範囲7・8の上限における水平方向の距離比率、同下限における水平方向の距離比率とを計算し、これらの比率により既知のアフィン変換を利用して仮撮影範囲8から撮影範囲7への変形率を得て上記正対変換処理を行う。
【0032】
上記両範囲7・8の上限と上記中心線O'O''との距離比率の計算から説明すると、上記撮影範囲7の上限と上記中心線O'O''との距離、即ち図中直線abと上記中心線O'O''との距離y0と上記仮撮影範囲8の上限と上記中心線O'O''との距離、即ち図中直線a'b'と中心線O'O''の距離y0'との比率を下記の各式(1)乃至(6)により計算する。
【0033】
図1の直角三角形ADOに着目し下記式(1)を得る。
【0034】
【数1】

【0035】
又同図の直角三角形ACOに着目し下記式(2)、(3)を得る。
【0036】
【数2】
【0037】
【数3】
【0038】
又同図の直角三角形ABCに着目し下記式(4)を得る。
【0039】
【数4】
【0040】
そして、上記式(4)に上記式(2)、(3)を代入して下記式(5)を得る。
【0041】
【数5】
【0042】
更に、上記式(5)に上記式(1)を代入して下記式(6)を得る。
【0043】
【数6】
【0044】
従って、上記式(6)によれば、赤外線カメラ2から原点Oまでの距離Lをパラメータとして必要とせず、上記ステップ2においてカメラ角度θ及び垂直画角θvを入力すれば、上記距離y0と距離y0'との比率を求めることができる。例えば、カメラ角度θ=40°、垂直画角θv=20°とした場合、y0=1.533・y0’となる。
【0045】
次に上記両範囲7・8の下限と上記中心線O'O''との距離比率の計算は、上記撮影範囲7の下限と上記中心線O'O''との距離、即ち図中直線cdと上記中心線O'O''との距離y1と上記仮撮影範囲8の下限と上記中心線O'O''との距離、即ち図中直線c'd'と中心線O'O''の距離y1'との比率を計算する。
【0046】
上記両範囲7・8の上限と上記中心線O'O''との距離比率の計算の場合と同様に、図1中の直角三角形AD'O、ACO、AECに着目し、下記式(6)'を得る。
【0047】
【数7】
【0048】
依って、この場合もカメラ角度θ及び垂直画角θvを入力すれば、上記距離y1と距離y1'との比率を求めることができる。例えば、カメラ角度θ=40°、垂直画角θv=20°とした場合、y1=1.139・y1’となる。
【0049】
上記両範囲7・8の上限における水平方向の距離比率に関しては、図2の水平画角θhを用いずとも、図1の直線AOと直線ABの距離比率がそのまま図2の直線abと直線a'b'の距離比率となる。又両範囲7・8の下限における水平方向の距離比率に関しては、図1の直線AOと直線AEの距離比率がそのまま図2の直線cdと直線c'd'の距離比率となる。
【0050】
上記の通り、枠abcd(撮影範囲7)と枠a'b'c'd'(仮撮影範囲8)との上限と中心線O'O''との距離比率、同下限と中心線O'O''との距離比率及び上限・下限における水平方向の距離比率から既知のアフィン変換を行い枠a'b'c'd'(仮撮影範囲8)から枠abcd(撮影範囲7)への変形率を得て、該変形率を利用して全静止画像4を正対変換処理し静止画像4’を得る。
【0051】
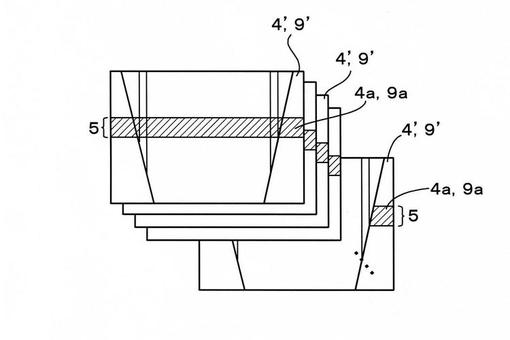
次に、正対変換後の各静止画像4’から一定位置の静止画像を切り取って切取静止画像4aを作成する切取処理(ステップ6)について説明すると、該切取処理を実行する前に切取位置が自動設定される。該切取位置は、原則的に正対変換時に定めた中心線O'O''付近に設定される。これは中心線O'O''に近い位置ほど正対変換の処理度が小さく、誤差が少ないためである。
【0052】
上記切取静止画像4aの切取幅5は車両1の速度に合わせて設定する。この設定は画像ライン数による直接入力(上記ステップ3による入力)による手動設定の他、カーナビゲーションシステムで使用されている車速パルスを利用する自動設定ができ、最初に設定を行うだけで正対変換後の全静止画像4’について自動的に処理することができる。
【0053】
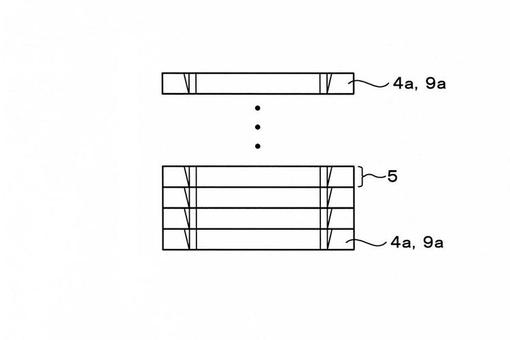
最後に、上記手順で切り取った全切取静止画像4aを合成する合成処理(ステップ7)について説明すると、上記切取静止画像4aは、撮影時に得られたフレームの順番で生成される。該合成処理は、上記切取処理にて切り取った画像4aを、図7に示す如く、単純にフレームの順番通りに繋げていく処理である。これにより図8に示す如く、調査対象部分30を俯瞰した1枚の合成静止熱画像6を得ることができる。
【0054】
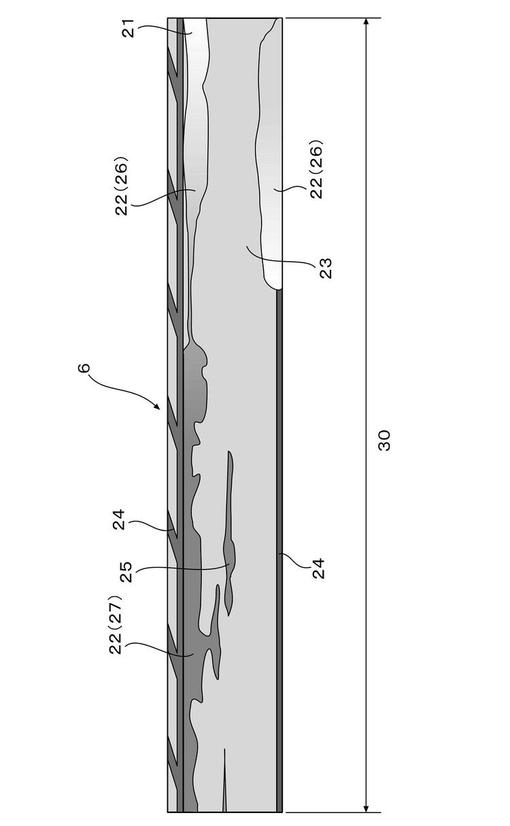
上記した「連続画像合成プログラム」により作成された上記合成静止熱画像6をパソコン3の表示部3aに表示し、又は出力することにより確認し温度ムラを検知して、コンクリート版20の劣化個所22を特定する。尚劣化個所22の内、空隙に雨水等が滞水していない個所26は、健全個所23よりも高い温度(図8では薄い色)で検出され、逆に空隙に雨水等が滞水している個所27は、健全個所23よりも低い温度(図8では濃い色)で検出される。又コンクリート版20が劣化していなくても、舗装21が劣化し亀裂等を有する場合には当該舗装21とコンクリート版20間に滞水個所が発生するが、このような滞水個所も上記27と同様に検出される。
【0055】
又上記温度ムラの検知に関しては、上記合成静止熱画像6を視認して行う他、健全個所23の温度帯域を設定し自動検知とすることも実施に応じ任意である。
【0056】
上記したように舗装21表面に赤外線カメラ2を正対して撮影しなくとも「連続画像合成プログラム」の正対変換手段により正対変換された上記合成静止熱画像6に基づいて正確な劣化個所22の特定ができる。
【0057】
更には、調査対象部分30が広範囲であっても、上記合成静止熱画像6で調査対象部分30全体を把握しながら劣化個所22を特定でき、調査対象部分30の現場に基づいた詳細な劣化個所22の特定ができる。
【0058】
又本発明にあっては、上記合成静止熱画像6の作成に加えて、ビデオカメラ2’による撮影動画像から同調査対象部分30の合成静止可視画像10を作成し、両者6、10を対比して確実な劣化個所22の特定ができる。
【0059】
即ち、ビデオカメラ2’を上記赤外線カメラ2と同様の条件で車両1の前端側上部に取り付けて、舗装21表面上を車両1で走行しながらビデオカメラ2’で調査対象部分30の上記舗装21表面の可視画像を撮影する。
【0060】
上記のように撮影した撮影動画像をパソコン3に取り込みハードディスクに保存する。尚パソコン3への撮影動画像の取り込みに関しては、既知の有線形式又は無線形式のオンライン接続によりビデオカメラ2’とパソコン3を接続し取り込むことができる。
【0061】
上記撮影動画像から正対変換した合成静止可視画像10を作成する手順については、上記した合成静止熱画像6を作成する手順と同様に図3のフローチャートと図4乃至図7の説明図に示す手順を介して行われ、まず、パソコン3にインストールされた「連続画像合成プログラム」を起動し、上記撮影動画像を読み込む(ステップ1)。
【0062】
続けて、パソコン3の入力部3bによりカメラ取付条件、即ち上記カメラ角度θ、垂直画角θv及び水平画角θh等を入力する(ステップ2)と共に、合成条件、即ち上記切取幅5及び最終的に作成する合成静止可視画像10の合成範囲等の条件を入力する(ステップ3)。尚上記合成静止熱画像6と合成静止可視画像10を対比するためには、上記合成条件は上記合成静止熱画像6作成時に入力した値と同一値を入力するのが好ましい。
【0063】
上記カメラ取付条件及び合成条件を入力すると撮影動画像を基にした合成静止可視画像10の作成が開始され、図4に示す如く、上記取り込んだ撮影動画像を静止画像作成処理によりフレーム毎に静止画像に変換して連続した複数の静止画像9を作成する(ステップ4)。
【0064】
次いで、図5に示す如く、上記連続静止画像9の全てを正対変換処理し正対変換された静止画像9’を作成する(ステップ5)。
【0065】
上記合成静止熱画像6作成時と同様に、正対変換処理後に得たい画像9’と一致する上記撮影範囲(枠abcdで囲む範囲)7と仮撮影範囲(枠a'b'c'd'で囲む範囲)8との変形率を得て、該変形率により正対変換処理を行う。
【0066】
次に、正対変換後の各静止画像9’から一定位置の静止画像を切り取って切取静止画像9aを作成する切取処理をし(ステップ6)、該切取処理により切り取った静止画像9aを、図7に示す如く、フレームの順番通りに繋げていく(ステップ7)。
【0067】
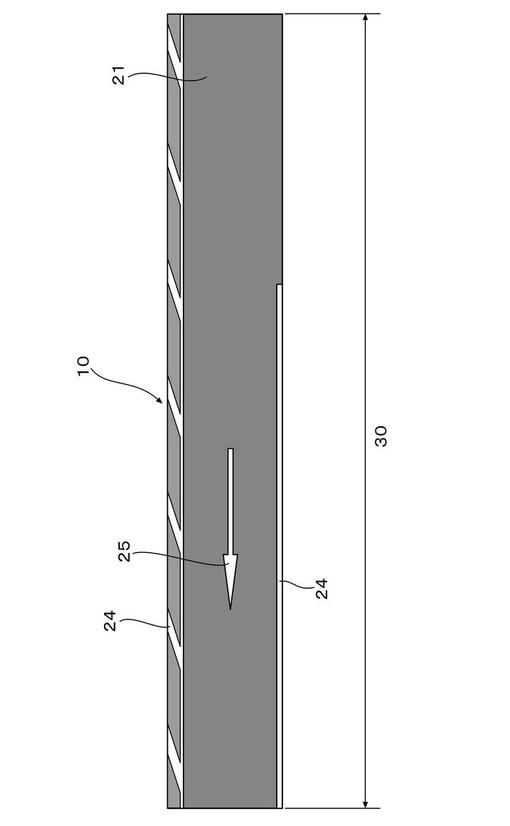
以上により図9に示す如く、調査対象部分30を俯瞰した1枚の合成静止可視画像10を得ることができる。
【0068】
従って、あとは上記合成静止熱画像6と合成静止可視画像10とを対比して劣化個所22の特定ができる。この対比により、特に、舗装表面21上の区画線24や道路標示25や汚れに起因する温度ムラを除外して誤特定を防止する。
【0069】
尚上記赤外線カメラ2、ビデオカメラ2’の取付位置は車両1の前端側上部に限られるものではなく、車両1の後端側上部でも良いが、前端側に取り付けた場合と後端側に取り付けた場合では撮影動画像の動きが逆となるので、「連続画像合成プログラム」における合成処理の合成順等を適宜調整する。
【0070】
又本実施例においては、車両1に設置したパソコン3で上記「連続画像合成プログラム」による処理を行っているが、本発明はこれに限定されるものではなく、車両1とは異なる場所、例えばオフィス等に設置した別のパソコンで上記「連続画像合成プログラム」による処理を行うことも実施に応じ任意である。尚このような場合には、車両1に設置されたパソコン3に保存された撮影動画像を上記別のパソコンにオフライン接続又は通信手段等によるオンライン接続で取り込むこととなる。
【0071】
以上の通り、調査対象部分30における劣化個所22を特定した後、該劣化個所22付近の舗装21を除去してコンクリート版20の実際の劣化状態を確認し、劣化状態に応じた補修を行うこととなる。
【符号の説明】
【0072】
1 車両
2 サーモグラフィ機器
2’ ビデオカメラ
3 パソコン
3a 表示部
3b 入力部
4 静止画像(熱画像)
4’ 正対変換処理後の静止画像(熱画像)
4a 切取静止画像(熱画像)
5 切取幅
6 合成静止熱画像
7 撮影範囲
8 仮撮影範囲
9 静止画像(可視画像)
9’ 正対変換処理後の静止画像(可視画像)
9a 切取静止画像(可視画像)
10 合成静止可視画像
20 コンクリート版
21 舗装
22 劣化個所
23 健全個所
24 区画線
25 道路標示
26 滞水していない劣化個所
27 滞水している劣化個所
30 調査対象部分
θ 赤外線カメラ(ビデオカメラ)取付角度
θv 垂直画角
θh 水平画角
O 原点
L 赤外線カメラ(ビデオカメラ)と原点との距離
【技術分野】
【0001】
本発明は橋梁、飛行場又は港湾等に打設されているコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムに関するものである。
【背景技術】
【0002】
上記コンクリート版は経年劣化の他、雨水や融雪・凍結防止目的の塩化カルシウム等により該コンクリート版内に埋設された鉄筋が腐食し膨張して、それに伴いコンクリートの浮きや剥離が生じ予期し難い部分に劣化個所を生起する。
【0003】
又上記劣化個所が車両走行に伴う繰り返し荷重を受けると当該劣化個所のコンクリートが砂利化し劣化状態を促進する。
【0004】
上記劣化個所を放置すると、延いてはコンクリート版表面の陥没やコンクリートの剥落が生じ、特に橋梁のコンクリート版(コンクリート床版)においては、最悪の場合にはコンクリートが抜け落ちて重大な事故を引き起こす恐れがある。
【0005】
従って、上記コンクリート版表面の陥没やコンクリートの剥落を未然に防ぐために既設のコンクリート版の劣化状態を継続して調査する必要があるが、通常、コンクリート版はアスファルト・煉瓦又は土石等の舗装により表面が覆われており、表面側から劣化個所を特定することが頗る困難である。
【0006】
その為、表面を舗装で覆われたコンクリート版の劣化調査においては、上記劣化個所がコンクリートの浮き・剥離や砂利化等によりコンクリート版と舗装間に空隙を画成することに注目して、調査対象部分の舗装表面を叩いた際の打音を聞き分けて上記空隙の存在を確認することにより劣化個所を特定する打音調査が広く行われている。
【0007】
しかし、上記した打音調査では、実際に調査対象部分の舗装表面を叩かなければならず、広範囲の調査が困難であると共に、交通規制を行う必要がある。又調査作業者の能力に左右されるため、定量的な調査ができない恐れもある。
【0008】
そこで、現在では調査対象部分の舗装表面を赤外線サーモグラフィ機器で撮影して、上記劣化個所の空隙に起因する温度ムラを検知して、上記舗装表面に対非接触で劣化個所を特定する調査が試みられている。
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記した赤外線サーモグラフィ調査では、調査対象部分が広範囲に亘る場合には、舗装表面の熱画像を静止画像撮影すると、大量の静止画を撮影しなければならず煩雑な作業を強いられるという問題点を有する。又舗装表面の熱画像を動画像撮影すると、今度は撮影した動画像で劣化個所を特定しなければならず、全体を把握した正確な特定が困難であるという問題点を有する。
【0010】
又赤外線サーモグラフィ機器により舗装表面を撮影する際に、通常は、舗装表面からの放射エネルギーを軽減するために該舗装表面に正対せず一定の角度をもって撮影することとなるが、このようにして正対せず撮影した画像による劣化個所の特定は距離感がつかめず、誤特定の原因となる恐れがある。又舗装表面に歪みがある場合にも、同様な恐れがある。
【課題を解決するための手段】
【0011】
本発明は斯かる実情に鑑み開発されたもので、請求項1記載の発明は、舗装で覆われたコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムであって、上記舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定することを特徴とする。
【0012】
請求項2記載の発明は、請求項1を前提として、上記舗装表面上を走行しながら該舗装表面の可視画像を動画像撮影する第二撮影手段を備え、該撮影動画像を上記取込手段で取り込むと共に取り込んだ当該撮影動画像から上記静止画像作成手段・正対変換手段・切取手段及び合成手段により合成静止可視画像を作成して、該合成静止可視画像と上記合成静止熱画像とを対比して、コンクリート版の劣化箇所を特定することを特徴とする。
【発明の効果】
【0013】
依って、請求項1記載の発明にあっては、調査対象部分における作業としては、走行しながら第一撮影手段により調査対象部分の舗装表面の熱画像を動画像撮影するだけでよいので、調査対象部分に滞在する時間を大幅に短縮できると共に、特に交通規制を行う必要がない。
【0014】
又舗装表面に正対して撮影しなくとも正対変換手段により正対変換された合成静止熱画像に基づいて正確な劣化個所の特定ができる。
【0015】
更には、調査対象部分が広範囲であっても、合成静止熱画像で調査対象部分全体を把握して、調査対象部分の現場に即した劣化個所の特定ができる。
【0016】
請求項2記載の発明にあっては、合成静止熱画像と合成静止可視画像とを対比して劣化個所の特定ができ、特に、舗装表面上の区画線・道路標示や汚れに起因する温度ムラを除外して誤特定を防止する。
【図面の簡単な説明】
【0017】
【図1】本発明に係る劣化調査システムを概示する側面図である。
【図2】本発明に係る劣化調査システムを概示する平面図である。
【図3】連続画像合成プログラムのフローチャートである。
【図4】静止画像作成処理の説明図である。
【図5】正対変換処理の説明図である。
【図6】切取処理の説明図である。
【図7】合成処理の説明図である。
【図8】合成静止熱画像の説明図である。
【図9】合成静止可視画像の説明図である。
【発明を実施するための形態】
【0018】
以下本発明を実施するための最良の形態を図1乃至図9に基づき説明する。
【0019】
本発明は図1・図2に示す如く、例えば橋梁のコンクリート床版の如き舗装21で覆われたコンクリート版20の劣化状態を赤外線サーモグラフィにより調査するシステムであり、車両1に取り付けられて調査対象部分30の上記舗装21表面上の熱画像を撮影する赤外線カメラ(赤外線サーモグラフィ機器)2と該赤外線カメラ2で撮影した動画像を取り込むパソコン(コンピュータ)3とを備える。
【0020】
上記赤外線カメラ2は車両1の前端側上部に配置され、垂直方向(舗装21に正対する方向)に対して一定の角度θをもって取り付けられる。これにより、舗装21表面からの放射エネルギーの影響を軽減することができると共に、広範囲の撮影ができる。尚図中θvは赤外線カメラ2の垂直画角、即ち、カメラレンズの垂直方向の視野角を示し、同θhは赤外線カメラ2の水平画角、即ち、カメラレンズの水平方向の視野角を示している。
【0021】
而して、舗装21表面上を車両1で走行しながら赤外線カメラ2で調査対象部分30の上記舗装21表面の熱画像を撮影すれば、調査対象部分30における作業を終えることとなる。その為、交通規制が不要であると共に、調査対象部分30での作業を大幅に短縮することができる。
【0022】
上記のように撮影した動画像をパソコン3に取り込みハードディスクに保存する。そして、パソコン3にインストールされた既知の熱画像解析プログラムにより上記撮影動画像(熱画像)の温度分布を解析して温度ムラの強調等を行う。尚パソコン3への撮影動画像の取り込みに関しては、既知の有線形式又は無線形式のオンライン接続により赤外線カメラ2とパソコン3を接続し取り込むことができる。
【0023】
次に、上記撮影動画像から正対変換した合成静止熱画像6を作成する手順について図3のフローチャートと図4乃至図8の説明図を用いて説明する。
【0024】
まず、パソコン3にインストールされた「連続画像合成プログラム」を起動し、撮影動画像を読み込む(ステップ1)。
【0025】
続けて、パソコン3の入力部3bによりカメラ取付条件、即ち上記カメラ角度θ、垂直画角θv及び水平画角θh等を入力する(ステップ2)と共に、合成条件、即ち後述する切取幅5及び最終的に作成する合成静止熱画像6の合成範囲等の条件を入力する(ステップ3)。尚カメラレンズのアスペクト比は一定であるため、上記垂直画角θv又は水平画角θhのいずれかを入力すれば、対角の画角は確定する。
【0026】
上記カメラ取付条件及び合成条件を入力すると撮影動画像を基にした合成静止熱画像6の作成が開始されるが、図4に示す如く、まず初めに上記読み込んだ撮影動画像を静止画像作成処理によりフレーム毎に静止画像に変換して連続した複数の静止画像4を作成する(ステップ4)。
【0027】
次いで、図5に示す如く、上記連続静止画像4の全てを正対変換処理し正対変換された静止画像4’を作成する(ステップ5)。ここで正対変換処理とは、一定の角度をもって撮影した実際の画像を正対して撮影したような画像へと変換する処理をいい、換言すると、図4に示す如く、斜め上方から撮影した画像はカメラに近い側は広く遠い側は狭くなっているが、これを図5に示す如く、正対して撮影(平面視)したような画像へ変換する処理をいう。
【0028】
ここで、正対変換処理の原理について図1・図2を用いて詳述する。図1中の原点Oは、赤外線カメラ2のカメラレンズ中心線と調査対象部分30の舗装21表面との交点を示し、Lは上記原点Oと赤外線カメラ2のカメラレンズとの距離を示している。又同図中の点Aは赤外線カメラ2のカメラレンズの位置、点Bは撮影範囲上限位置、点Eは同下限位置、点Cは赤外線カメラ2のカメラレンズからの垂直線と上記舗装表面21との交点、点D・D’は上記原点Oでカメラレンズ中心線と直交する線と垂直画角θvを示す線の交点を示している。
【0029】
又図2中の枠abcdで囲む範囲7は上記した条件で取付られた赤外線カメラ2で実際に撮影される範囲を平面視したものであり、正対変換処理後に得たい画像4’と一致する。他方、枠a'b'c'd'で囲む範囲8は仮に上記原点Oから距離Lを置いた位置で赤外線カメラ2で正対撮影した場合の仮撮影範囲を示している。尚直線O'O''は上記原点Oを含む水平方向の中心線を示している。
【0030】
従って、正対変換処理後に得たい画像4’と一致する上記撮影範囲7と上記仮撮影範囲8との変形率を得て、該変形率により正対変換処理を行う。
【0031】
詳述すると、上記両範囲7・8の上限と上記中心線O'O''との距離比率、同下限と上記中心線O'O''との距離比率と上記両範囲7・8の上限における水平方向の距離比率、同下限における水平方向の距離比率とを計算し、これらの比率により既知のアフィン変換を利用して仮撮影範囲8から撮影範囲7への変形率を得て上記正対変換処理を行う。
【0032】
上記両範囲7・8の上限と上記中心線O'O''との距離比率の計算から説明すると、上記撮影範囲7の上限と上記中心線O'O''との距離、即ち図中直線abと上記中心線O'O''との距離y0と上記仮撮影範囲8の上限と上記中心線O'O''との距離、即ち図中直線a'b'と中心線O'O''の距離y0'との比率を下記の各式(1)乃至(6)により計算する。
【0033】
図1の直角三角形ADOに着目し下記式(1)を得る。
【0034】
【数1】
【0035】
又同図の直角三角形ACOに着目し下記式(2)、(3)を得る。
【0036】
【数2】
【0037】
【数3】
【0038】
又同図の直角三角形ABCに着目し下記式(4)を得る。
【0039】
【数4】
【0040】
そして、上記式(4)に上記式(2)、(3)を代入して下記式(5)を得る。
【0041】
【数5】
【0042】
更に、上記式(5)に上記式(1)を代入して下記式(6)を得る。
【0043】
【数6】
【0044】
従って、上記式(6)によれば、赤外線カメラ2から原点Oまでの距離Lをパラメータとして必要とせず、上記ステップ2においてカメラ角度θ及び垂直画角θvを入力すれば、上記距離y0と距離y0'との比率を求めることができる。例えば、カメラ角度θ=40°、垂直画角θv=20°とした場合、y0=1.533・y0’となる。
【0045】
次に上記両範囲7・8の下限と上記中心線O'O''との距離比率の計算は、上記撮影範囲7の下限と上記中心線O'O''との距離、即ち図中直線cdと上記中心線O'O''との距離y1と上記仮撮影範囲8の下限と上記中心線O'O''との距離、即ち図中直線c'd'と中心線O'O''の距離y1'との比率を計算する。
【0046】
上記両範囲7・8の上限と上記中心線O'O''との距離比率の計算の場合と同様に、図1中の直角三角形AD'O、ACO、AECに着目し、下記式(6)'を得る。
【0047】
【数7】
【0048】
依って、この場合もカメラ角度θ及び垂直画角θvを入力すれば、上記距離y1と距離y1'との比率を求めることができる。例えば、カメラ角度θ=40°、垂直画角θv=20°とした場合、y1=1.139・y1’となる。
【0049】
上記両範囲7・8の上限における水平方向の距離比率に関しては、図2の水平画角θhを用いずとも、図1の直線AOと直線ABの距離比率がそのまま図2の直線abと直線a'b'の距離比率となる。又両範囲7・8の下限における水平方向の距離比率に関しては、図1の直線AOと直線AEの距離比率がそのまま図2の直線cdと直線c'd'の距離比率となる。
【0050】
上記の通り、枠abcd(撮影範囲7)と枠a'b'c'd'(仮撮影範囲8)との上限と中心線O'O''との距離比率、同下限と中心線O'O''との距離比率及び上限・下限における水平方向の距離比率から既知のアフィン変換を行い枠a'b'c'd'(仮撮影範囲8)から枠abcd(撮影範囲7)への変形率を得て、該変形率を利用して全静止画像4を正対変換処理し静止画像4’を得る。
【0051】
次に、正対変換後の各静止画像4’から一定位置の静止画像を切り取って切取静止画像4aを作成する切取処理(ステップ6)について説明すると、該切取処理を実行する前に切取位置が自動設定される。該切取位置は、原則的に正対変換時に定めた中心線O'O''付近に設定される。これは中心線O'O''に近い位置ほど正対変換の処理度が小さく、誤差が少ないためである。
【0052】
上記切取静止画像4aの切取幅5は車両1の速度に合わせて設定する。この設定は画像ライン数による直接入力(上記ステップ3による入力)による手動設定の他、カーナビゲーションシステムで使用されている車速パルスを利用する自動設定ができ、最初に設定を行うだけで正対変換後の全静止画像4’について自動的に処理することができる。
【0053】
最後に、上記手順で切り取った全切取静止画像4aを合成する合成処理(ステップ7)について説明すると、上記切取静止画像4aは、撮影時に得られたフレームの順番で生成される。該合成処理は、上記切取処理にて切り取った画像4aを、図7に示す如く、単純にフレームの順番通りに繋げていく処理である。これにより図8に示す如く、調査対象部分30を俯瞰した1枚の合成静止熱画像6を得ることができる。
【0054】
上記した「連続画像合成プログラム」により作成された上記合成静止熱画像6をパソコン3の表示部3aに表示し、又は出力することにより確認し温度ムラを検知して、コンクリート版20の劣化個所22を特定する。尚劣化個所22の内、空隙に雨水等が滞水していない個所26は、健全個所23よりも高い温度(図8では薄い色)で検出され、逆に空隙に雨水等が滞水している個所27は、健全個所23よりも低い温度(図8では濃い色)で検出される。又コンクリート版20が劣化していなくても、舗装21が劣化し亀裂等を有する場合には当該舗装21とコンクリート版20間に滞水個所が発生するが、このような滞水個所も上記27と同様に検出される。
【0055】
又上記温度ムラの検知に関しては、上記合成静止熱画像6を視認して行う他、健全個所23の温度帯域を設定し自動検知とすることも実施に応じ任意である。
【0056】
上記したように舗装21表面に赤外線カメラ2を正対して撮影しなくとも「連続画像合成プログラム」の正対変換手段により正対変換された上記合成静止熱画像6に基づいて正確な劣化個所22の特定ができる。
【0057】
更には、調査対象部分30が広範囲であっても、上記合成静止熱画像6で調査対象部分30全体を把握しながら劣化個所22を特定でき、調査対象部分30の現場に基づいた詳細な劣化個所22の特定ができる。
【0058】
又本発明にあっては、上記合成静止熱画像6の作成に加えて、ビデオカメラ2’による撮影動画像から同調査対象部分30の合成静止可視画像10を作成し、両者6、10を対比して確実な劣化個所22の特定ができる。
【0059】
即ち、ビデオカメラ2’を上記赤外線カメラ2と同様の条件で車両1の前端側上部に取り付けて、舗装21表面上を車両1で走行しながらビデオカメラ2’で調査対象部分30の上記舗装21表面の可視画像を撮影する。
【0060】
上記のように撮影した撮影動画像をパソコン3に取り込みハードディスクに保存する。尚パソコン3への撮影動画像の取り込みに関しては、既知の有線形式又は無線形式のオンライン接続によりビデオカメラ2’とパソコン3を接続し取り込むことができる。
【0061】
上記撮影動画像から正対変換した合成静止可視画像10を作成する手順については、上記した合成静止熱画像6を作成する手順と同様に図3のフローチャートと図4乃至図7の説明図に示す手順を介して行われ、まず、パソコン3にインストールされた「連続画像合成プログラム」を起動し、上記撮影動画像を読み込む(ステップ1)。
【0062】
続けて、パソコン3の入力部3bによりカメラ取付条件、即ち上記カメラ角度θ、垂直画角θv及び水平画角θh等を入力する(ステップ2)と共に、合成条件、即ち上記切取幅5及び最終的に作成する合成静止可視画像10の合成範囲等の条件を入力する(ステップ3)。尚上記合成静止熱画像6と合成静止可視画像10を対比するためには、上記合成条件は上記合成静止熱画像6作成時に入力した値と同一値を入力するのが好ましい。
【0063】
上記カメラ取付条件及び合成条件を入力すると撮影動画像を基にした合成静止可視画像10の作成が開始され、図4に示す如く、上記取り込んだ撮影動画像を静止画像作成処理によりフレーム毎に静止画像に変換して連続した複数の静止画像9を作成する(ステップ4)。
【0064】
次いで、図5に示す如く、上記連続静止画像9の全てを正対変換処理し正対変換された静止画像9’を作成する(ステップ5)。
【0065】
上記合成静止熱画像6作成時と同様に、正対変換処理後に得たい画像9’と一致する上記撮影範囲(枠abcdで囲む範囲)7と仮撮影範囲(枠a'b'c'd'で囲む範囲)8との変形率を得て、該変形率により正対変換処理を行う。
【0066】
次に、正対変換後の各静止画像9’から一定位置の静止画像を切り取って切取静止画像9aを作成する切取処理をし(ステップ6)、該切取処理により切り取った静止画像9aを、図7に示す如く、フレームの順番通りに繋げていく(ステップ7)。
【0067】
以上により図9に示す如く、調査対象部分30を俯瞰した1枚の合成静止可視画像10を得ることができる。
【0068】
従って、あとは上記合成静止熱画像6と合成静止可視画像10とを対比して劣化個所22の特定ができる。この対比により、特に、舗装表面21上の区画線24や道路標示25や汚れに起因する温度ムラを除外して誤特定を防止する。
【0069】
尚上記赤外線カメラ2、ビデオカメラ2’の取付位置は車両1の前端側上部に限られるものではなく、車両1の後端側上部でも良いが、前端側に取り付けた場合と後端側に取り付けた場合では撮影動画像の動きが逆となるので、「連続画像合成プログラム」における合成処理の合成順等を適宜調整する。
【0070】
又本実施例においては、車両1に設置したパソコン3で上記「連続画像合成プログラム」による処理を行っているが、本発明はこれに限定されるものではなく、車両1とは異なる場所、例えばオフィス等に設置した別のパソコンで上記「連続画像合成プログラム」による処理を行うことも実施に応じ任意である。尚このような場合には、車両1に設置されたパソコン3に保存された撮影動画像を上記別のパソコンにオフライン接続又は通信手段等によるオンライン接続で取り込むこととなる。
【0071】
以上の通り、調査対象部分30における劣化個所22を特定した後、該劣化個所22付近の舗装21を除去してコンクリート版20の実際の劣化状態を確認し、劣化状態に応じた補修を行うこととなる。
【符号の説明】
【0072】
1 車両
2 サーモグラフィ機器
2’ ビデオカメラ
3 パソコン
3a 表示部
3b 入力部
4 静止画像(熱画像)
4’ 正対変換処理後の静止画像(熱画像)
4a 切取静止画像(熱画像)
5 切取幅
6 合成静止熱画像
7 撮影範囲
8 仮撮影範囲
9 静止画像(可視画像)
9’ 正対変換処理後の静止画像(可視画像)
9a 切取静止画像(可視画像)
10 合成静止可視画像
20 コンクリート版
21 舗装
22 劣化個所
23 健全個所
24 区画線
25 道路標示
26 滞水していない劣化個所
27 滞水している劣化個所
30 調査対象部分
θ 赤外線カメラ(ビデオカメラ)取付角度
θv 垂直画角
θh 水平画角
O 原点
L 赤外線カメラ(ビデオカメラ)と原点との距離
【特許請求の範囲】
【請求項1】
舗装で覆われたコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムであって、上記舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定することを特徴とするコンクリート版の劣化調査システム。
【請求項2】
上記舗装表面上を走行しながら該舗装表面の可視画像を動画像撮影する第二撮影手段を備え、該撮影動画像を上記取込手段で取り込むと共に取り込んだ当該撮影動画像から上記静止画像作成手段・正対変換手段・切取手段及び合成手段により合成静止可視画像を作成して、該合成静止可視画像と上記合成静止熱画像とを対比して、コンクリート版の劣化箇所を特定することを特徴とする請求項1記載のコンクリート版の劣化調査システム。
【請求項1】
舗装で覆われたコンクリート版の劣化状態を赤外線サーモグラフィにより調査するシステムであって、上記舗装表面上を走行しながら該舗装表面の熱画像を動画像撮影する第一撮影手段と、該撮影動画像をコンピュータに取り込む取込手段と、取り込んだ上記撮影動画像から連続する複数の静止画像を作成する静止画像作成手段と、該静止画像作成手段で作成された各連続静止画像を正対変換する正対変換手段と、正対変換後の上記連続静止画像の全てから一定位置の静止画像を切り取る切取手段と、該切取静止画像を連続合成する合成手段とを備え、上記全手段により作成された合成静止熱画像の温度ムラを検知して、コンクリート版の劣化個所を特定することを特徴とするコンクリート版の劣化調査システム。
【請求項2】
上記舗装表面上を走行しながら該舗装表面の可視画像を動画像撮影する第二撮影手段を備え、該撮影動画像を上記取込手段で取り込むと共に取り込んだ当該撮影動画像から上記静止画像作成手段・正対変換手段・切取手段及び合成手段により合成静止可視画像を作成して、該合成静止可視画像と上記合成静止熱画像とを対比して、コンクリート版の劣化箇所を特定することを特徴とする請求項1記載のコンクリート版の劣化調査システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−237283(P2011−237283A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−109076(P2010−109076)
【出願日】平成22年5月11日(2010.5.11)
【出願人】(507000660)株式会社補修技術設計 (2)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月11日(2010.5.11)
【出願人】(507000660)株式会社補修技術設計 (2)
【Fターム(参考)】
[ Back to top ]