
コンクリート用締固め装置
【課題】コンクリートの締固めを自動化ないし機械化するとともに、鉄筋を障害とせず、かつ狭空間であっても均一な締固めを可能としたコンクリート用締固め装置を提供する。
【解決手段】筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2内部に前記バイブレータ装置4及び推進手段3A、3Bの電源部を内設するとともに、推進制御装置15を設け、かつ前記筒体状ケーシング2内部に自己位置検出装置14を設けるとともに、前記推進制御装置15及び/又は自己位置検出装置14の情報を無線伝送する無線通信装置17を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置17との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータ21を備える。
【解決手段】筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2内部に前記バイブレータ装置4及び推進手段3A、3Bの電源部を内設するとともに、推進制御装置15を設け、かつ前記筒体状ケーシング2内部に自己位置検出装置14を設けるとともに、前記推進制御装置15及び/又は自己位置検出装置14の情報を無線伝送する無線通信装置17を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置17との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータ21を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動化ないし機械化したコンクリート用締固め装置に関する。
【背景技術】
【0002】
従来より、各種コンクリート構造物の構築に際しては、内部の気泡を無くして良質なコンクリート躯体を構築するために、打設したコンクリートに対して振動を与える締固めが行われている。締固め装置としては、後端に給電ケーブルが接続されるとともに、先端部分に振動部が設けられた棒状のバイブレーターを用い、これを作業員が手に持って人力により行っていた。
【0003】
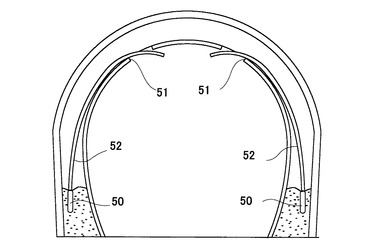
しかし、この方法の場合は、作業員が侵入できない狭空間内での締固めが十分に行われ難いなどの問題があった。例えば、トンネル覆工コンクリートの構築に当たっては、トンネルの内壁面より覆工コンクリート厚だけ離間した位置に型枠を組立て、トンネル内壁面と型枠との間の狭空間内にコンクリートを打設する。この場合のコンクリートの締固めは、図7に示されるように、バイブレータ50を検査窓51からコンクリート打設空間内に挿入し、打設したコンクリートの上部側に振動を与えるようにバイブレータ50を手作業で引上げ操作しながら振動を与えるようにしているが、前記検査窓51の位置が限定されているとともに、打設コンクリートの上部位置を視認することができず、勘に頼りながらバイブレータ50を引上げ操作しなければならない。更には、バイブレータ50のケーブル52部分の剛性が高い場合は、トンネル壁面に接触する位置に偏倚し、剛性が低い場合は型枠に接触する位置に偏倚するため、コンクリート打設空間の略中央に位置保持することができない等の理由から、コンクリート全体に均一に振動を与えることが困難であった。
【0004】
他方で近年は、コンクリートの締固めを自動化ないし機械化する試みが幾つか成されている。例えば、下記特許文献1では、型枠を使用してコンクリートを打設する工程において、型枠のコンクリート打設側面に、上下、左右方向に移動自在に配備させた走行機構に、振動部材を装着させた後、型枠とコンクリートを打設すべき壁面または別の型枠との間へコンクリートを打設し、振動部材を振動させると共に、走行機構を介して振動部材を型枠のコンクリート打設側面に沿わせて上下、左右方向に移動させ、コンクリートを締固めるようにしたコンクリート締固め装置が開示されている。
【0005】
また、下記特許文献2では、推進フロートを備え、その推進フロートの回転により、打設されたコンクリート上を移動する移動体に、コンクリート締固めバイブレータを、昇降及び傾動自在にしてかつ上記打設コンクリートに挿入した位置とそれより抜脱した位置とに保持するバイブレータ保持機構を搭載してなる自走式コンクリート締固め装置が開示されている。
【特許文献1】特開2004−156364号公報
【特許文献2】特開平7−180358号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に係る締固め装置の場合は、型枠内部に鉄筋が配置されている場合は、走行機構を型枠内面に沿って移動させることは実質的に困難であるとともに、走行機構の移動は、該走行機構の位置を把握してはじめて適正な方向、位置での移動制御が可能となるが、走行機構の位置検出手段が無いため、振動部材をコンクリート打設部位に合わせて、走行機構を正確に移動制御することは困難であるなどの問題があった。
【0007】
また、前記特許文献2に係る締固め装置の場合は、移動体が打設されたコンクリート上を移動するものであるため、締固めバイブレータをコンクリート内の適性深さ位置に設定し振動を与えることが可能となる。しかし、本特許文献2が対象としているのは、テトラポッドのような無筋のコンクリート構造体であり、鉄筋が配置されるコンクリート構造物の場合は、コンクリート打設空間内に配筋された鉄筋のために、移動体をコンクリート上に浮かべることすらできない。仮に、鉄筋の隙間に浮かべることが出来たとしても、鉄筋が邪魔をして自在に動き回ることができないなどの問題があった。
【0008】
そこで本発明の主たる課題は、コンクリートの締固めを自動化ないし機械化するとともに、鉄筋を障害とせず、かつ狭空間であっても均一な締固めを可能としたコンクリート用締固め装置を提供することにある。
【課題を解決するための手段】
【0009】
前記課題を解決するために請求項1に係る本発明として、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有することを特徴とするコンクリート用締固め装置が提供される。
【0010】
上記請求項1記載の発明は、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにしたものである。
【0011】
従って、本コンクリート用締固め装置を打設したコンクリートに浮かべ、推進手段を駆動させて自由に移動させることにより、コンクリート全体に亘って均一に振動を与えることができる。本締固め装置は、筒体状の外形を成しているため、鉄筋が存在しても、或いは狭空間であっても、自由に屈折しながら鉄筋の間を巡るように移動可能であるとともに、狭空間にも容易に進入可能であるため、コンクリートの隅々まで振動を与えることが可能となる。なお、本締固め装置は、1台のみの使用でも良いが複数台使用すれば、より均一にかつ短時間でコンクリートに振動を与えることができる。
【0012】
請求項2に係る本発明として、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設するとともに、推進制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えることを特徴とするコンクリート用締固め装置が提供される。
【0013】
上記請求項2記載の発明は、本締固め装置を移動制御することでより均一にコンクリートの締固めが行えるようにしたものである。すなわち、前記請求項1記載の発明に係る締固め装置に対して、推進手段の制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えるようにしたものである。
【0014】
従って、前記自己位置検出装置によって位置検出を行った情報を無線通信装置を介して外部のリモートコントローラ又は制御用コンピュータに送り、位置を把握した上で、移動制御信号を締固め装置に送り、推進手動の制御装置によって、前進、後進及び移動方向などを制御するようにする。
【0015】
また、この締固め装置によれば、前記リモートコントローラ又は制御管理用コンピュータに移動履歴データを保存することで、前記締固め装置の移動履歴を管理・確認することが可能となる。
【0016】
請求項3に係る本発明として、前記筒状体ケーシングにフロートを付設してある請求項1、2いずれかに記載のコンクリート用締固め装置が提供される。
【0017】
上記請求項3記載の発明は、本締固め装置にコンクリートに浮かぶ浮力を与えるためにフロートを付設するようにしたものである。
【発明の効果】
【0018】
以上詳説のとおり本発明によれば、コンクリートの締固めを自動化ないし機械化するとともに、鉄筋を障害とせず、かつ狭空間であっても均一な締固めが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施の形態について図面を参照しながら詳述する。
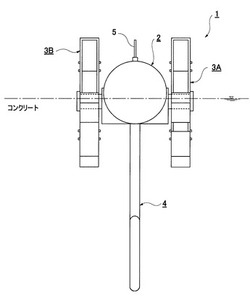
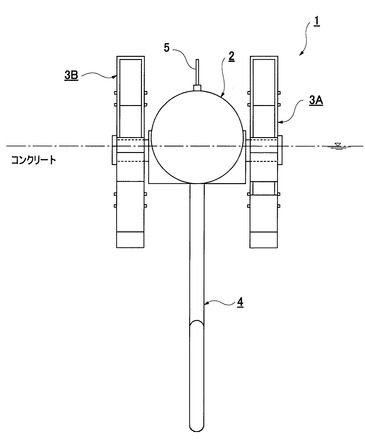
図1は本発明に係る締固め装置1の正面図であり、図2はその側面図である。
【0020】
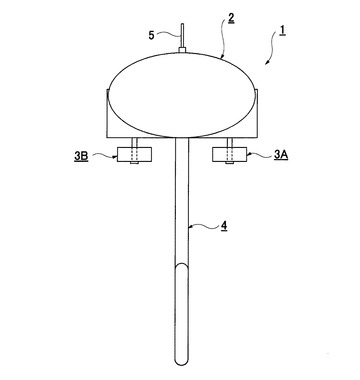
本締固め装置1は、筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2の内部に前記バイブレータ装置4及び推進手段3A、3Bのための電源部10を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するものである。
【0021】
より具体的には、筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2内部に前記バイブレータ装置4及び推進手段3A、3Bの電源部10を内設するとともに、推進制御装置15を設け、かつ前記筒体状ケーシング2の内部に自己位置検出装置14を設けるとともに、前記推進制御装置15及び/又は自己位置検出装置14の情報を無線伝送する無線通信装置17を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置17との間で相互通信可能とされるリモートコントローラ又は制御用コンピュータ21を備えるものである。
【0022】
前記筒体状ケーシング2は、例えば樹脂または薄鋼板からなる筒体状、図示例では胴部を円筒状とし、前部及び後部を半球体状に成形したケーシングであり、筒体状ケーシング2の側面にはそれぞれ推進手段3A、3Bが設けられている。
【0023】
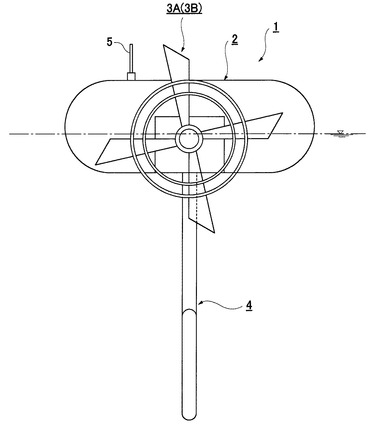
前記推進手段3A、3Bは、4枚の羽根車に補強リングを取り付けた構造を成すもので、前記羽根車は先端側のみに羽根板を取り付けた構造となっている。なお、前記推進手段3A、3Bとしては、上記以外に公知の種々の構造形式を採用することができる。
【0024】
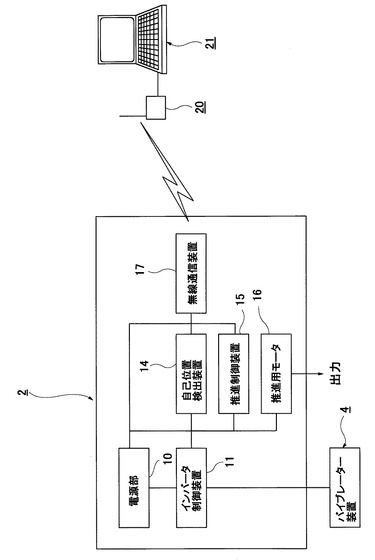
前記筒体状ケーシング2の内部には、図3に示されるように、前記バイブレータ装置4及び推進手段3A、3Bの電源部10が内設されている。前記バイブレータ装置4は、重心を偏心させた回転振動子を加振用モータによって高速回転させることにより振動を発生させる装置であり、インバータ制御装置11によって、回転数が可変制御されるようになっている。
【0025】
また、前記筒体状ケーシング2の内部には自己位置検出装置14が内蔵されている。この自己位置検出装置14としては、例えば地磁気センサと加速度センサとを用いた方式や、地磁気センサとロータリーエンコーダを用いた方式などを採用することができる。前者の方式は、地磁気センサで測定した重力成分を加速度センサから引き、締固め装置1自体の加速度を検出し、加速度を2回積分することにより位置を検出するものであり、後者の方式は微小時間毎に地磁気センサから方位を、ロータリーエンコーダから移動距離(推進手段の回転数から移動距離を算出)を同時に取得し、データ取得毎に和を取っていくことにより位置を検出するものである。
【0026】
前記推進手段3A、3Bを回転駆動させる推進用モータ16は、推進用制御装置15によって、回転数及び回転方向が制御されるようになっている。すなわち、本締固め装置1の推進速度と移動方向とが制御されるようになっている。
【0027】
前記自己位置検出装置14によって検出された位置情報および前記推進制御装置15への制御信号は、筒体状ケーシング2に内蔵された無線通信装置17によって、外部のリモートコントローラ又は制御管理用コンピュータ21との間で相互に伝送可能となっている。図示された制御管理用コンピュータ21は、無線機20が接続され、前記無線通信装置17と相互に情報通信が可能とされ、前記自己位置検出装置14によって検出された位置情報が記憶されるとともに、操作者は締固め装置1の位置を把握した上で、推進速度と移動方向とを制御する制御信号を無線通信装置17に送り、この制御信号に基づいて推進制御装置15が制御されるようになっている。外部のリモートコントローラ又は制御管理用コンピュータ21に対する伝送情報は、締固め装置1の位置情報(移動履歴)の他に、電源の充電残量、バイブレータ装置4の稼働状況、推進用モータ16の回転数等の情報を伝送することができる。なお、図1中、符合5は前記無線通信装置17のためのアンテナである。
【0028】
前記無線通信装置17は、バイブレータ装置4の振動によって故障や破損が生じないように、振動緩衝機構によって振動を減衰したり、振動が伝達し難い部材で囲んだりした構造とするのが望ましい。
【0029】
前記締固め装置1は、装置全体として打設したコンクリートに浮かぶ浮力を有するようにする。内蔵される機器等の重量が嵩み浮力を確保できない場合は、筒体状ケーシング2にフロートを付設してコンクリートに浮かぶ浮力を確保するようにしてもよい。この場合、前記フロートは、筒体状ケーシング2の側面位置に付設する他、上部側又は下面側に設けるようにしてもよい。
【0030】
以上詳述した締固め装置1により、例えばトンネル覆工コンクリートの締固めを行う要領について図4及び図5に基づいて詳述する。
【0031】
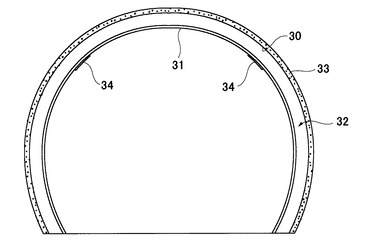
図示されたトンネル施工では、地盤掘削の後、トンネル内壁面に1次覆工として、吹付コンクリート33が形成されており、この吹付コンクリート33の内壁面の内側に覆工コンクリートの厚み分の空間を空けた状態で型枠31が設けられる。なお、この型枠31はセントルと呼ばれる移動型枠であり、型枠自体は鋼板であるため、電波が通らない。従って、コンクリート打設空間内にアンテナを延ばした通信中継器22を型枠外面に設置するようにしている。また、コンクリート打設空間内には鉄筋が配置される場合と無筋の場合とがある。
【0032】
前記型枠31の長手方向には所定の間隔で検査窓34,34が設けられており、この検査窓34からコンクリート圧送ホースを挿入してコンクリート打設が行われる。
【0033】
本締固め装置1を打設空間内に打設したコンクリートに浮かべ、制御管理用コンピュータ21からの指令によって、バイブレータ装置4を駆動させるとともに、推進手段3A、3Bを駆動させて締固め装置1を移動させながら、コンクリートの打設を継続し、コンクリートの締固めを行う。以後は、コンクリートを打設する度毎に本締固め装置1を稼働させてコンクリートの締固めを行う。
【0034】
〔他の形態例〕
(1)上記形態例では、推進手段3A、3Bを筒体状ケーシング2の側面に設けるようにしたが、図6に示されるように、筒体状ケーシング2の下面側に設けるようにしてもよい。この場合は、回転軸を傾けたり、回転方向の抵抗差によって前進方向の推力が得られるようにする。
(2)前記筒体状ケーシング2の先端面に接触センサを溶接付け等により堅固に付設し、仮に鉄筋や型枠等に衝突した場合は、強制的に進行方向を変えたり、反転方向に移動させるようにして鉄筋に対する引掛かりを防止したり、コンクリート打設空間内で端部〜端部間を往復させるようにすることも可能である。
(3)上記形態例では、トンネル覆工コンクリートの締固め例を示したが、本締固め装置1は対象を限定せず、コンクリートの締固め一般に適用が可能である。
【図面の簡単な説明】
【0035】
【図1】本発明に係る締固め装置1の正面図である。
【図2】その側面図である。
【図3】筒体状ケーシング2の内部構造を示すブロック図である。
【図4】トンネル覆工コンクリートの締固め要領を説明するための型枠設置状態を示すトンネル断面図である。
【図5】コンクリート締固め要領の説明図である。
【図6】締固め装置1の変形例を示す側面図である。
【図7】従来のコンクリート締固め要領を示すトンネル断面図である。
【符号の説明】
【0036】
1…締固め装置、2…筒体状ケーシング、3A・3B…推進手段、4…バイブレータ装置、5…アンテナ、10…電源部、11…インバータ制御装置、12…バイブレータ装置用モータ、14…自己位置検出装置、15…推進制御装置、16…推進用モータ、17…無線通信装置
【技術分野】
【0001】
本発明は、自動化ないし機械化したコンクリート用締固め装置に関する。
【背景技術】
【0002】
従来より、各種コンクリート構造物の構築に際しては、内部の気泡を無くして良質なコンクリート躯体を構築するために、打設したコンクリートに対して振動を与える締固めが行われている。締固め装置としては、後端に給電ケーブルが接続されるとともに、先端部分に振動部が設けられた棒状のバイブレーターを用い、これを作業員が手に持って人力により行っていた。
【0003】
しかし、この方法の場合は、作業員が侵入できない狭空間内での締固めが十分に行われ難いなどの問題があった。例えば、トンネル覆工コンクリートの構築に当たっては、トンネルの内壁面より覆工コンクリート厚だけ離間した位置に型枠を組立て、トンネル内壁面と型枠との間の狭空間内にコンクリートを打設する。この場合のコンクリートの締固めは、図7に示されるように、バイブレータ50を検査窓51からコンクリート打設空間内に挿入し、打設したコンクリートの上部側に振動を与えるようにバイブレータ50を手作業で引上げ操作しながら振動を与えるようにしているが、前記検査窓51の位置が限定されているとともに、打設コンクリートの上部位置を視認することができず、勘に頼りながらバイブレータ50を引上げ操作しなければならない。更には、バイブレータ50のケーブル52部分の剛性が高い場合は、トンネル壁面に接触する位置に偏倚し、剛性が低い場合は型枠に接触する位置に偏倚するため、コンクリート打設空間の略中央に位置保持することができない等の理由から、コンクリート全体に均一に振動を与えることが困難であった。
【0004】
他方で近年は、コンクリートの締固めを自動化ないし機械化する試みが幾つか成されている。例えば、下記特許文献1では、型枠を使用してコンクリートを打設する工程において、型枠のコンクリート打設側面に、上下、左右方向に移動自在に配備させた走行機構に、振動部材を装着させた後、型枠とコンクリートを打設すべき壁面または別の型枠との間へコンクリートを打設し、振動部材を振動させると共に、走行機構を介して振動部材を型枠のコンクリート打設側面に沿わせて上下、左右方向に移動させ、コンクリートを締固めるようにしたコンクリート締固め装置が開示されている。
【0005】
また、下記特許文献2では、推進フロートを備え、その推進フロートの回転により、打設されたコンクリート上を移動する移動体に、コンクリート締固めバイブレータを、昇降及び傾動自在にしてかつ上記打設コンクリートに挿入した位置とそれより抜脱した位置とに保持するバイブレータ保持機構を搭載してなる自走式コンクリート締固め装置が開示されている。
【特許文献1】特開2004−156364号公報
【特許文献2】特開平7−180358号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に係る締固め装置の場合は、型枠内部に鉄筋が配置されている場合は、走行機構を型枠内面に沿って移動させることは実質的に困難であるとともに、走行機構の移動は、該走行機構の位置を把握してはじめて適正な方向、位置での移動制御が可能となるが、走行機構の位置検出手段が無いため、振動部材をコンクリート打設部位に合わせて、走行機構を正確に移動制御することは困難であるなどの問題があった。
【0007】
また、前記特許文献2に係る締固め装置の場合は、移動体が打設されたコンクリート上を移動するものであるため、締固めバイブレータをコンクリート内の適性深さ位置に設定し振動を与えることが可能となる。しかし、本特許文献2が対象としているのは、テトラポッドのような無筋のコンクリート構造体であり、鉄筋が配置されるコンクリート構造物の場合は、コンクリート打設空間内に配筋された鉄筋のために、移動体をコンクリート上に浮かべることすらできない。仮に、鉄筋の隙間に浮かべることが出来たとしても、鉄筋が邪魔をして自在に動き回ることができないなどの問題があった。
【0008】
そこで本発明の主たる課題は、コンクリートの締固めを自動化ないし機械化するとともに、鉄筋を障害とせず、かつ狭空間であっても均一な締固めを可能としたコンクリート用締固め装置を提供することにある。
【課題を解決するための手段】
【0009】
前記課題を解決するために請求項1に係る本発明として、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有することを特徴とするコンクリート用締固め装置が提供される。
【0010】
上記請求項1記載の発明は、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにしたものである。
【0011】
従って、本コンクリート用締固め装置を打設したコンクリートに浮かべ、推進手段を駆動させて自由に移動させることにより、コンクリート全体に亘って均一に振動を与えることができる。本締固め装置は、筒体状の外形を成しているため、鉄筋が存在しても、或いは狭空間であっても、自由に屈折しながら鉄筋の間を巡るように移動可能であるとともに、狭空間にも容易に進入可能であるため、コンクリートの隅々まで振動を与えることが可能となる。なお、本締固め装置は、1台のみの使用でも良いが複数台使用すれば、より均一にかつ短時間でコンクリートに振動を与えることができる。
【0012】
請求項2に係る本発明として、筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設するとともに、推進制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えることを特徴とするコンクリート用締固め装置が提供される。
【0013】
上記請求項2記載の発明は、本締固め装置を移動制御することでより均一にコンクリートの締固めが行えるようにしたものである。すなわち、前記請求項1記載の発明に係る締固め装置に対して、推進手段の制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えるようにしたものである。
【0014】
従って、前記自己位置検出装置によって位置検出を行った情報を無線通信装置を介して外部のリモートコントローラ又は制御用コンピュータに送り、位置を把握した上で、移動制御信号を締固め装置に送り、推進手動の制御装置によって、前進、後進及び移動方向などを制御するようにする。
【0015】
また、この締固め装置によれば、前記リモートコントローラ又は制御管理用コンピュータに移動履歴データを保存することで、前記締固め装置の移動履歴を管理・確認することが可能となる。
【0016】
請求項3に係る本発明として、前記筒状体ケーシングにフロートを付設してある請求項1、2いずれかに記載のコンクリート用締固め装置が提供される。
【0017】
上記請求項3記載の発明は、本締固め装置にコンクリートに浮かぶ浮力を与えるためにフロートを付設するようにしたものである。
【発明の効果】
【0018】
以上詳説のとおり本発明によれば、コンクリートの締固めを自動化ないし機械化するとともに、鉄筋を障害とせず、かつ狭空間であっても均一な締固めが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施の形態について図面を参照しながら詳述する。
図1は本発明に係る締固め装置1の正面図であり、図2はその側面図である。
【0020】
本締固め装置1は、筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2の内部に前記バイブレータ装置4及び推進手段3A、3Bのための電源部10を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するものである。
【0021】
より具体的には、筒体状ケーシング2に棒状又は板状のバイブレータ装置4を垂設するとともに、推進手段3A、3Bを取付け、前記筒体状ケーシング2内部に前記バイブレータ装置4及び推進手段3A、3Bの電源部10を内設するとともに、推進制御装置15を設け、かつ前記筒体状ケーシング2の内部に自己位置検出装置14を設けるとともに、前記推進制御装置15及び/又は自己位置検出装置14の情報を無線伝送する無線通信装置17を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置17との間で相互通信可能とされるリモートコントローラ又は制御用コンピュータ21を備えるものである。
【0022】
前記筒体状ケーシング2は、例えば樹脂または薄鋼板からなる筒体状、図示例では胴部を円筒状とし、前部及び後部を半球体状に成形したケーシングであり、筒体状ケーシング2の側面にはそれぞれ推進手段3A、3Bが設けられている。
【0023】
前記推進手段3A、3Bは、4枚の羽根車に補強リングを取り付けた構造を成すもので、前記羽根車は先端側のみに羽根板を取り付けた構造となっている。なお、前記推進手段3A、3Bとしては、上記以外に公知の種々の構造形式を採用することができる。
【0024】
前記筒体状ケーシング2の内部には、図3に示されるように、前記バイブレータ装置4及び推進手段3A、3Bの電源部10が内設されている。前記バイブレータ装置4は、重心を偏心させた回転振動子を加振用モータによって高速回転させることにより振動を発生させる装置であり、インバータ制御装置11によって、回転数が可変制御されるようになっている。
【0025】
また、前記筒体状ケーシング2の内部には自己位置検出装置14が内蔵されている。この自己位置検出装置14としては、例えば地磁気センサと加速度センサとを用いた方式や、地磁気センサとロータリーエンコーダを用いた方式などを採用することができる。前者の方式は、地磁気センサで測定した重力成分を加速度センサから引き、締固め装置1自体の加速度を検出し、加速度を2回積分することにより位置を検出するものであり、後者の方式は微小時間毎に地磁気センサから方位を、ロータリーエンコーダから移動距離(推進手段の回転数から移動距離を算出)を同時に取得し、データ取得毎に和を取っていくことにより位置を検出するものである。
【0026】
前記推進手段3A、3Bを回転駆動させる推進用モータ16は、推進用制御装置15によって、回転数及び回転方向が制御されるようになっている。すなわち、本締固め装置1の推進速度と移動方向とが制御されるようになっている。
【0027】
前記自己位置検出装置14によって検出された位置情報および前記推進制御装置15への制御信号は、筒体状ケーシング2に内蔵された無線通信装置17によって、外部のリモートコントローラ又は制御管理用コンピュータ21との間で相互に伝送可能となっている。図示された制御管理用コンピュータ21は、無線機20が接続され、前記無線通信装置17と相互に情報通信が可能とされ、前記自己位置検出装置14によって検出された位置情報が記憶されるとともに、操作者は締固め装置1の位置を把握した上で、推進速度と移動方向とを制御する制御信号を無線通信装置17に送り、この制御信号に基づいて推進制御装置15が制御されるようになっている。外部のリモートコントローラ又は制御管理用コンピュータ21に対する伝送情報は、締固め装置1の位置情報(移動履歴)の他に、電源の充電残量、バイブレータ装置4の稼働状況、推進用モータ16の回転数等の情報を伝送することができる。なお、図1中、符合5は前記無線通信装置17のためのアンテナである。
【0028】
前記無線通信装置17は、バイブレータ装置4の振動によって故障や破損が生じないように、振動緩衝機構によって振動を減衰したり、振動が伝達し難い部材で囲んだりした構造とするのが望ましい。
【0029】
前記締固め装置1は、装置全体として打設したコンクリートに浮かぶ浮力を有するようにする。内蔵される機器等の重量が嵩み浮力を確保できない場合は、筒体状ケーシング2にフロートを付設してコンクリートに浮かぶ浮力を確保するようにしてもよい。この場合、前記フロートは、筒体状ケーシング2の側面位置に付設する他、上部側又は下面側に設けるようにしてもよい。
【0030】
以上詳述した締固め装置1により、例えばトンネル覆工コンクリートの締固めを行う要領について図4及び図5に基づいて詳述する。
【0031】
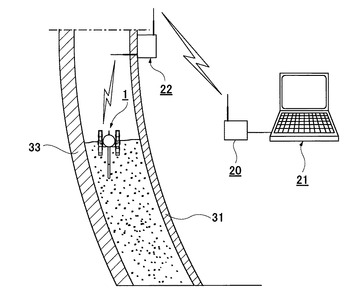
図示されたトンネル施工では、地盤掘削の後、トンネル内壁面に1次覆工として、吹付コンクリート33が形成されており、この吹付コンクリート33の内壁面の内側に覆工コンクリートの厚み分の空間を空けた状態で型枠31が設けられる。なお、この型枠31はセントルと呼ばれる移動型枠であり、型枠自体は鋼板であるため、電波が通らない。従って、コンクリート打設空間内にアンテナを延ばした通信中継器22を型枠外面に設置するようにしている。また、コンクリート打設空間内には鉄筋が配置される場合と無筋の場合とがある。
【0032】
前記型枠31の長手方向には所定の間隔で検査窓34,34が設けられており、この検査窓34からコンクリート圧送ホースを挿入してコンクリート打設が行われる。
【0033】
本締固め装置1を打設空間内に打設したコンクリートに浮かべ、制御管理用コンピュータ21からの指令によって、バイブレータ装置4を駆動させるとともに、推進手段3A、3Bを駆動させて締固め装置1を移動させながら、コンクリートの打設を継続し、コンクリートの締固めを行う。以後は、コンクリートを打設する度毎に本締固め装置1を稼働させてコンクリートの締固めを行う。
【0034】
〔他の形態例〕
(1)上記形態例では、推進手段3A、3Bを筒体状ケーシング2の側面に設けるようにしたが、図6に示されるように、筒体状ケーシング2の下面側に設けるようにしてもよい。この場合は、回転軸を傾けたり、回転方向の抵抗差によって前進方向の推力が得られるようにする。
(2)前記筒体状ケーシング2の先端面に接触センサを溶接付け等により堅固に付設し、仮に鉄筋や型枠等に衝突した場合は、強制的に進行方向を変えたり、反転方向に移動させるようにして鉄筋に対する引掛かりを防止したり、コンクリート打設空間内で端部〜端部間を往復させるようにすることも可能である。
(3)上記形態例では、トンネル覆工コンクリートの締固め例を示したが、本締固め装置1は対象を限定せず、コンクリートの締固め一般に適用が可能である。
【図面の簡単な説明】
【0035】
【図1】本発明に係る締固め装置1の正面図である。
【図2】その側面図である。
【図3】筒体状ケーシング2の内部構造を示すブロック図である。
【図4】トンネル覆工コンクリートの締固め要領を説明するための型枠設置状態を示すトンネル断面図である。
【図5】コンクリート締固め要領の説明図である。
【図6】締固め装置1の変形例を示す側面図である。
【図7】従来のコンクリート締固め要領を示すトンネル断面図である。
【符号の説明】
【0036】
1…締固め装置、2…筒体状ケーシング、3A・3B…推進手段、4…バイブレータ装置、5…アンテナ、10…電源部、11…インバータ制御装置、12…バイブレータ装置用モータ、14…自己位置検出装置、15…推進制御装置、16…推進用モータ、17…無線通信装置
【特許請求の範囲】
【請求項1】
筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有することを特徴とするコンクリート用締固め装置。
【請求項2】
筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設するとともに、推進制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えることを特徴とするコンクリート用締固め装置。
【請求項3】
前記筒状体ケーシングにフロートを付設してある請求項1、2いずれかに記載のコンクリート用締固め装置。
【請求項1】
筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有することを特徴とするコンクリート用締固め装置。
【請求項2】
筒体状ケーシングに棒状又は板状のバイブレータ装置を垂設するとともに、推進手段を取付け、前記筒体状ケーシング内部に前記バイブレータ装置及び推進手段の電源部を内設するとともに、推進制御装置を設け、かつ前記筒体状ケーシング内部に自己位置検出装置を設けるとともに、前記推進制御装置及び/又は自己位置検出装置の情報を無線伝送する無線通信装置を内設し、装置全体として打設したコンクリートに浮かぶ浮力を有するようにし、外部に前記無線通信装置との間で相互通信可能とされるリモートコントローラ又は制御管理用コンピュータを備えることを特徴とするコンクリート用締固め装置。
【請求項3】
前記筒状体ケーシングにフロートを付設してある請求項1、2いずれかに記載のコンクリート用締固め装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−287209(P2009−287209A)
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願番号】特願2008−138467(P2008−138467)
【出願日】平成20年5月27日(2008.5.27)
【出願人】(591284601)株式会社演算工房 (22)
【Fターム(参考)】
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願日】平成20年5月27日(2008.5.27)
【出願人】(591284601)株式会社演算工房 (22)
【Fターム(参考)】
[ Back to top ]