
コンテナ脱着車両及びコンテナ脱着方法
【課題】 積載容積の異なる複数種のコンテナを、1種類のコンテナ脱着車両に入れ替えて積載させる。
【解決手段】 コンテナ脱着車両1は、積載容積が8m3のコンテナC4tと積載容積が4m3のコンテナC2tとを入れ替えて積載でき、コンテナ脱着車両1の主要諸元は4tのコンテナを積載し走行するように設計し、スライドシリンダ10がスライドアーム7を伸縮させ固縛・固縛解除し、フックシリンダ11がフックアーム8を複数段に伸縮し脱着動作を円滑にし、固縛装置12は左右一対の第1固縛部13と、左右一対の第2固縛部14があり、一方が固縛するとき、他方は非衝突位置に収納するように可動式に構成し、衝突を防止する。
【解決手段】 コンテナ脱着車両1は、積載容積が8m3のコンテナC4tと積載容積が4m3のコンテナC2tとを入れ替えて積載でき、コンテナ脱着車両1の主要諸元は4tのコンテナを積載し走行するように設計し、スライドシリンダ10がスライドアーム7を伸縮させ固縛・固縛解除し、フックシリンダ11がフックアーム8を複数段に伸縮し脱着動作を円滑にし、固縛装置12は左右一対の第1固縛部13と、左右一対の第2固縛部14があり、一方が固縛するとき、他方は非衝突位置に収納するように可動式に構成し、衝突を防止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車台上にメインフレームを備え、メインフレームに対して回動させるキャリア部を備え、該キャリア部上にコンテナを脱着するようにしたコンテナ脱着車両に関する。
【背景技術】
【0002】
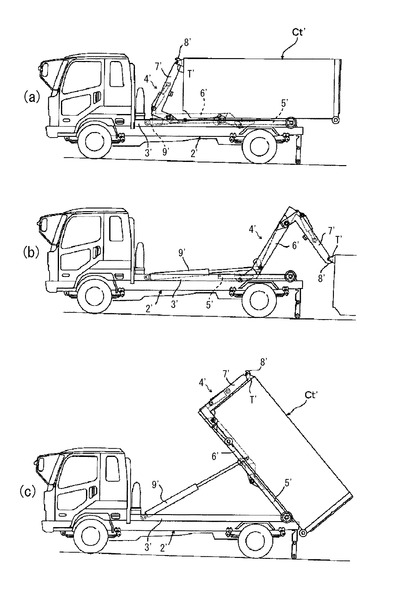
図43は特許文献1〜3のコンテナ脱着車両を説明する図であり、車体部2’上に取り付けられたメインフレーム3’を備え、該メインフレーム3’に設けられたキャリア部4上に積載する所定の積載容積のコンテナCtを脱着するようにした構成である。
図43(a)に示す如くキャリア部4’は、車体F’の車体長手方向(図43の左右方向)に延びる形状のダンプフレーム5’、該ダンプフレーム5’の前方に回動するように接続し車体長手方向に延びる形状の支持アーム6’、及び支持アーム6’の前方に接続し上下方向に延びるスライドアーム7’から構成する。
スライドアーム7’の上方には、コンテナCt’の前方上部に設けた掛止部T’と係合するようなフックアーム8’が備えられ、支持アーム6’には、該支持アーム6’を車体長手方向に起伏回動させるメインシリンダ7’が接続する。
【0003】
ダンプフレーム5’に対する支持アーム6’の回動する状態で、メインシリンダ9’を作動させると、図43(b)に示す如くダンプフレーム5’を回動させることなく支持アーム6’が起伏回動し、コンテナCtがキャリア部4’に対して脱着する。
【0004】
ダンプフレーム5’に対する支持アーム6’の回動を禁止した状態で、メインシリンダ9’を作動させると、図43(c)に示す如くダンプフレーム5’及び支持アーム6’が一体となって起伏回動し、キャリア部4上に積載した状態のコンテナCtがダンプ作動する。
【0005】
ここで、コンテナCtには、容量に応じて外形寸法の異なる種々のものがあり、それぞれに対応してコンテナ脱着車両を製造する。例えば、最大積載量が2トンのコンテナ脱着自動車は、コンテナC2t(積載容積が4m3)を専門に積載し、最大積載量が4トンのコンテナ脱着自動車は、コンテナC4t(積載容量が8m3)を専用で積載しており、それぞれに対応して車両緒元を設定した2t用コンテナ脱着車両と、4t用コンテナ脱着車両とをそれぞれ製造する。当然、4t用コンテナ脱着車両はコンテナC2tを積載不可能な構造である。
【0006】
特許文献3の固縛装置は、スイングフレームの後方部分9の側面には、コンテナ底面のロック手段となるフックに係合する位置とその係合が外れる位置との間で旋回するロックアームが取り付けられ、コンテナ搭載時の走行安定性を高めている。他の構造の固縛装置が特許文献4及び5に記載される。
【0007】
【特許文献1】特開平11−59257号公報
【特許文献2】特開2004−17926公報
【特許文献3】特開平6−305355号公報
【特許文献4】特開平9−267681号公報
【特許文献5】特開2001−334862公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、コンテナ及びコンテナ脱着車両には様々なメーカーがあり、メーカーごとにコンテナ及びコンテナ脱着車両の設計が大幅に異なっている。特許文献1〜3のコンテナ脱着車両では、フックアーム8’の長さは固定でありフックの位置を変更することができない。積載容積の異なる複数種のコンテナ、例えば、コンテナC2t,コンテナC4tの外形寸法は相違し、フックアーム8’と係合する掛止部T’の位置が変わってくるので、コンテナの積載量に応じてそれぞれ別のコンテナ脱着車両が製造する。特許文献3乃至5の通り、コンテナの固縛装置も1種類のコンテナの積載容積に対応して1種類の固縛装置が取り付けられており、複数種類の積載容積のコンテナに対応させて、それぞれに別仕様の固縛装置が取り付けられている。そのため、積載容積の相違するコンテナC4t,C2tを同一のコンテナ脱着車両に積載させることは不可能である。コンテナC4t,C2tの種類に合わせ、且つ、メーカー毎に異なる仕様のコンテナ脱着車両をそれぞれ製造し、使用せざるをえない。したがって、1つのメーカで製造した1種類のコンテナ脱着車両でさえ、相違する積載容積のコンテナを搭載できないこともあり、使用者にとっては、作業効率やコスト面で非常に不便であった。
【0009】
本発明は、上記点に鑑み、積載容積の異なる複数種類のコンテナの制限、或いは、メーカー毎の仕様の相違に制限を受けず、しかも、構造を複雑化させることなく、1種類のコンテナ脱着車両で複数種類の積載容積のコンテナを兼用して積載させ、コストを低減し、コンテナ脱着車両の用途を拡大することを目的とする。
【課題を解決するための手段】
【0010】
上記課題に鑑み、請求項1のコンテナ脱着車両1は、積載容積の相違する複数種類のコンテナC4t,C2tを積載する車体部2と、車体部2の車台に取り付けたメインフレーム3と、メインフレーム3に連結するダンプフレーム5と、ダンプフレーム5に対し車体長手方向に回動自在に結合し、コンテナC4t,C2tを車両後部から脱着するL型のキャリア部4と、キャリア部4を駆動する駆動部と、駆動部を制御する制御部19と、を備え、キャリア部4が、ダンプフレーム5に対して車体長手方向に回動自在に連結する支持アーム6と、支持アーム6の軸方向にスライドするスライドアーム7と、スライドアーム7の縦ケーシングの軸方向に沿ってスライドするとともに、コンテナC4t,C2tの掛止部Tと掛止するフック81を有するフックアーム8と、を備え、駆動部が、キャリア部4を回動するメイン駆動部9と、スライドアーム7をスライドするスライド駆動部10と、フックアーム8をスライドするフック駆動部11と、を備え、制御部19から駆動部に出力する信号を複数種類のコンテナC4t,C2tに対応させて設定し、該信号に応じて駆動部の駆動状態を相違させ、複数種類のコンテナC4t,C2tのいずれも脱着することを特徴とする。
【0011】
コンテナ脱着車両1は、最大積載量が4tのほか、増トン3.5t用のコンテナ脱着車両、増トン5.5tコンテナ脱着車両なども含む。増トンとは、中型クラスをベースとして、軸許容荷重やタイヤ許容荷重に余裕を持たせて、積載量に余裕を持たせたものである。
【0012】
請求項2のコンテナ脱着車両1は、複数種類のコンテナC4t,C2tの底面に形成する係合部P4t,P2tの種類に対応させてキャリア部4にそれぞれ相違する位置に配置する可動式の複数種類の固縛部13,14と、複数種類の固縛部13,14を駆動する固縛駆動部16と、を備える固縛装置12を設け、複数種類のコンテナC4t,C2tを脱着するときに種類に応じて制御部19から固縛駆動部16へ出力する信号を複数種類に設定し、複数の固縛部13,14のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、他方の固縛部を一方の係合部に衝突しないように移動させる。
【0013】
請求項3のコンテナ脱着車両1のキャリア部4は積載容積の相違する少なくとも2種類の第1コンテナC4tと、第2コンテナC2tと、を積載し、固縛装置12は、2種類のコンテナC4t,C2tの底面部にそれぞれ設けられた第1係合部P4t及び第2係合部P2tをそれぞれ固縛する第1固縛部13及び第2固縛部14を備え、第1固縛部13は第2固縛部14に対しダンプフレーム5に対して車体長手方向に相違する位置に配置し、スライドアーム7が車体長手方向にスライドすることにより、キャリア部4に水平に積載した状態のコンテナC4tの第1係合部P4tを第1固縛部13が固縛或いは固縛解除し、第2係合部P2tを第2固縛部14が固縛或いは固縛解除する。
【0014】
請求項4のコンテナ脱着車両1の制御部19は、フックアーム8を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させ、第1位置から第2位置にフックアーム8をスライドすることにより、積載容積の大きなコンテナC4tの固縛が解除し、フックアーム8を第3位置から第4位置にスライドすることにより、積載容積の小さなコンテナC2tの固縛が解除する。
【0015】
請求項4で規定する上記第2位置と第3位置とは異なる位置、或いは同一位置に設定してもよい。第1位置または第3位置では支持アームはダンプフレーム5に対する回動を禁止した状態になるとともに、第2位置または第4位置ではダンプフレーム5に対して回動する状態となるように構成してもよい。
【0016】
請求項5において、フックアーム8が第1位置または第3位置にて停止した状態で、制御部19は、操作部20のダンプ操作により、ダンプフレーム5を支持アーム6に自動的にロックし、支持アーム6のダンプフレーム5に対する回動を禁止する。
【0017】
請求項6のコンテナ脱着車両1の固縛部12は、昇降、回動、又は車体長手方向にスライドする。
【0018】
請求項7のコンテナ脱着車両1の固縛部はダンプフレーム5の軸方向に対し垂直方向への昇降動作を行なう構造を備え、車体長手方向の前方に配置する第1固縛部13と、第1固縛部13に対し車体長手方向の後方に配置する第2固縛部14とを備え、第1固縛部13と、第2固縛部14とを、シーソー機構を備える連結部15が連結し、一方の固縛部と他方の固縛部が逆方向に移動する。
【0019】
請求項8のコンテナ脱着車両1の固縛部は車体幅方向に回動動作を行なう第1固縛部313及び第2固縛部314を備え、一方の固縛部が起立すると、他方の固縛部が倒伏する。
【0020】
請求項9のコンテナ脱着車両1の固縛部は車体長手方向にスライドするスライド部215を備え、スライド部215がスライドすると、第1固縛部213及び第2固縛部214のいずれか一方を固縛し、他方の固縛部を固縛解除する。
【0021】
請求項10のコンテナ脱着車両1の制御部19は、フックアーム8を少なくとも3つの高さ位置に制御する回路を備え、積載容積が大きなコンテナC4tをキャリア部4に脱着するとき、フック駆動部11は伸長位置を維持し、積載容積が小さなコンテナC2tを脱着するときに、キャリア部4の回動位置が所定位置よりも車体後方である場合には、フックアーム8は伸長位置よりもさらに伸長させた最大伸長位置を維持し、回動位置が所定位置よりも車体前方である場合には、短縮位置を維持する。
【0022】
請求項11のコンテナ脱着車両1のスライド駆動部10は、1本の油圧駆動部と、油圧駆動部の原点を検出する原点センサと、油圧駆動部のロッドの位置を検出するエンコーダとを備え、制御部19はロッドの位置を数値制御する制御回路を備え、設定した目標位置にロッドが接近したとき、油圧駆動部の速度を減速する。
【0023】
請求項12のコンテナ脱着車両1の制御部19が操作部20を備え、操作部20は、2種類のコンテナC4t,C2tに対応する2個の脱着/ダンプ兼用スイッチ、2種類のコンテナC4t,C2tに対応する2個のダンプ/脱着切換スイッチを備え、スイッチに対応して制御部19に順次制御が設定する。
【0024】
請求項13のコンテナ脱着車両1のスライドアーム507は、枢動する2つのケーシング507aと507bとを備え、該ケーシング507aと507bとを傾動シリンダ511で駆動する。
【0025】
請求項14のコンテナ脱着車両1は、車体部と、該車体部の車台に取り付けたメインフレーム3と、前記メインフレーム3に連結するダンプフレーム5と、前記ダンプフレーム5に対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部4と、前記キャリア部4を駆動する駆動部と、前記駆動部を制御する制御部19と、を備え、前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて前記キャリア部4又はダンプフレーム5にそれぞれ相違する位置に配置する可動式の複数種類の固縛部13,14と、該複数種類の固縛部を駆動する固縛駆動部16と、を備える固縛装置を設け、前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部19から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部13,14のうちいずれか一方の固縛部が対応する一方の係合部P2t、P4tを固縛するときには、該他方の固縛部を前記一方の係合部P2t,P4tに衝突しないように移動させるものである。
【0026】
請求項15のコンテナ脱着方法は、車台上に取り付けたメインフレーム3にダンプフレーム5を備え、ダンプフレーム5に対してメイン駆動部9が、支持アーム6とスライドアーム7を供えるL型のキャリア部4を、車体長手方向に回動させ、スライド駆動部10がスライドアーム7を支持アーム6に対してスライドさせ、フックアーム8をスライドアーム7に対してスライドさせ、積載容積が大きな第1コンテナC4tと、第1コンテナC4tよりも積載容積が小さな第2コンテナC2tを含む、複数のコンテナC4t,C2tを車両後部から車体長手方向に移動させて脱着させ、コンテナC4t,C2tを積載した状態で走行する場合には固縛装置12がコンテナC4t,C2tを固縛するコンテナ脱着方法において、
(1)第1コンテナC4tを積み降す際、
a.車体長手方向の前方側の第1位置でフックアーム8を停止させ、フックアーム8を伸長位置で停止させ、固縛装置12がコンテナC4tを固縛した状態で走行可能状態に設定する積載ステップと、
b.第1位置から車体長手方向の後方側の第2位置にフックアーム7及びスライドアーム8を車体長手方向にスライドさせ、第1コンテナC4tと固縛装置12との固縛を解除する固縛解除ステップと、
c.キャリア部4をダンプフレーム5に対して車体長手方向の後方に回動させながら、案内部でコンテナ底部レールR4tを案内し、第1コンテナC4tの後部輪を着地させる回動ステップと、を備え、
(2)第2コンテナC2tを積み降す際、
a.(1)a.の第1位置よりも車体長手方向の後方側に設定した第3位置でフックアーム8を停止させ、フックアーム8をスライドアーム7に対して短縮位置で停止させ、固縛装置12が第2コンテナC2tを水平に固縛した状態でコンテナを走行可能状態に設定する積載ステップと、
b.第3位置よりも車体後方側に設定した第4位置にフックアーム8をスライドさせ、第2コンテナC2tと固縛装置12との固縛を解除する固縛解除ステップと、
c.キャリア部4をダンプフレーム5に対して後方に回動させ、案内部がコンテナ底部レールR2tを案内する第1案内ステップと、
d.コンテナ後部車輪Wが着地したときにキャリア部4を所定角度で停止させる停止ステップと、
e.停止中にフックアーム8をスライドアーム7から伸長させる伸長ステップと、
f.キャリア部4をダンプフレーム5に対して後方に回動させ、案内部の上空をコンテナ底部レールR2tが通過し、第2コンテナC2tの後部輪を着地させる第2案内ステップと、
を備えることを特徴とする。
【0027】
請求項16のコンテナ脱着方法は、車台上に取り付けたメインフレーム3にダンプフレーム5を備え、ダンプフレーム5に対してメイン駆動部9がキャリア部4を車体長手方向に回動させ、スライド駆動部10がスライドアーム7をスライドさせ、フック駆動部11がフックアーム8をスライドさせ、
積載容積が大きな第1コンテナC4tと、第1コンテナC4tよりも積載容積が小さな第2コンテナC2tを含む、複数のコンテナC4t,C2tを車両後部から車体長手方向に移動させて脱着させ、
コンテナC4t,C2tを積載した状態で走行する場合には固縛装置12がコンテナC4t,C2tを固縛するコンテナ脱着方法において、
(1)第1コンテナC4tを積み込む際、
a.伸長位置で停止させたフックアーム8を、水平に着地した第1コンテナC4tに掛止する掛止ステップと、
b.キャリア部4をダンプフレーム5に対して前方に回動させながら、第1コンテナC4tの前脚を地面から離脱させ、案内部でコンテナ底部レールR4tを案内しフックアーム8を第2位置に移動する回動ステップと、
c.第2位置から車体前方側の第1位置にフックアーム7及びスライドアーム8をスライドさせ、第1コンテナC4tを固縛装置12で固縛する固縛ステップと、
d.車体の前方側の第1位置でフックアーム8及びスライドアーム7を停止させ、コンテナを走行可能状態に設定する積載ステップと、を備え、
(2)第2コンテナC2tを積み込む際、
a.伸長位置で停止させたフックアーム8を、水平に着地した第2コンテナC2tに掛止する掛止ステップと、
b.キャリア部4をダンプフレーム5に対して車体長手方向の前方に回動させ、第2コンテナC2tの前脚を地面から離脱させ、コンテナ底部レールR2tが案内部36の上空を通過する第1案内ステップと、
c.コンテナ後部車輪Wが離陸するときにキャリア部4を停止させる停止ステップと、
d.停止中にフックアーム8をスライドアーム7に対して短縮させる短縮ステップと、
e.キャリア部4をメインフレーム3に対して前方に回動させながら、案内部36がフックアーム8が第4位置に至るまでコンテナ底部レールR2tを案内する第2案内ステップと、
f.第4位置よりも車体長手方向の前方であって且つ(1)c.の第1位置よりも車体長手方向の後方側に設定した第3位置にフックアーム8をスライドさせ、第2コンテナC2tを固縛装置12で固縛する固縛ステップと、
g.第3位置でフックアーム8及びスライドアーム7を停止させ、コンテナC2tを走行可能状態に設定する積載ステップと、
を備えることを特徴とする。
【発明の効果】
【0028】
請求項1〜16の発明によれば、フックアームをキャリア部に対して伸縮することにより、コンテナの掛止部の位置に合わせて、フックアームの位置を調節できるので、積載容積の異なる複数種のコンテナを1種類のコンテナ脱着車両に入れ替えて積載させることを容易に実現できる。従来、複数種類のコンテナ脱着車両を要していたところ、1種類のコンテナ脱着車両で対応できるので、コンテナ脱着車両の保険料、車検費用、人件費、駐車スペースを削減できる。1台のコンテナ脱着車両で兼用できるので、新たな用途が拡大する。
【0029】
フックアームをキャリア部に対して伸縮することで、フックアームに加わる衝撃を緩和できる等、コンテナの脱着の際に行うキャリア部の回動動作を円滑にできる。
【0030】
請求項2の発明によれば、コンテナの脱着に際し、固縛装置と、コンテナ或いはキャリア部との衝突を回避できる。
【0031】
請求項3の発明によれば、複数の積載容積のコンテナに対応させて、複数種類のコンテナの固定を確実にし、コンテナ脱着車両の走行中の安全性を高めることができる。
【0032】
請求項4の発明によれば、スライド駆動部を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させるよう構成するので、いずれのコンテナを適用させる場合であっても、スライドアームの動きを同一の動きにできるので、固縛或いは固縛解除の構成が簡素になる。車体の横揺れに対して強くなる。
【0033】
請求項5の発明によれば、自動的にフック装置が動作してダンプフレームに対するキャリア部のロック操作が容易になるとともに、安全性が高くなる。スライド駆動部と、ダンプロック駆動部の両機能を発揮できるので、構成を簡素にできるとともにコストダウンを図ることができる。
【0034】
請求項6の発明によれば、固縛部は、昇降、回動、又は車体軸方向にスライドするので、固縛部とコンテナとの衝突を防止できる。
【0035】
請求項7の発明によれば、第1固縛部と、第2固縛部とを、シーソーを備える連結部が連結し、一方の固縛部と他方の固縛部が逆方向に移動するので、固縛駆動部の本数の低減でき、制御部の構成も簡素にできる。
【0036】
請求項8及び9の発明によれば、固縛駆動部の本数を低減でき、精密な退避動作が可能となる。
【0037】
請求項10の発明によれば、フックアームの位置をキャリア部に対して変更できるので、コンテナの脱着の際に、コンテナ荷重に起因する衝撃からフックアームを保護できる。
【0038】
請求項11の発明によれば、スライド駆動部を1本に限定し油圧回路を簡単な構造にし、ロッドの停止位置の精度を上げ、精密なスライドアームの位置制御が可能となる。
【0039】
請求項12の発明によれば、操作スイッチの数を低減し、脱着動作、ダンプ動作及び固縛動作の複雑な動きをワンタッチの切換によって簡単に操作することができるので、操作者の負担を軽減できる。
【0040】
請求項13の発明によれば、スライドアームの自由度を高め、作業範囲を拡大できる。
【0041】
請求項14の発明によれば、複数の積載容積のコンテナに対応させて、複数種類のコンテナの固定を確実にし、コンテナの脱着に際し、固縛装置と、コンテナ或いはキャリア部との衝突を回避でき、コンテナ脱着車両の走行中の安全性を高めることができる。
【発明を実施するための最良の形態】
【0042】
≪第1実施形態≫
以下に、本発明の好適な一実施形態であるコンテナ脱着車両1について図面を参照して説明する。コンテナ脱着車両1は最大積載量が4tである。コンテナ脱着車両1は積載容積が8m3のコンテナ(以下、コンテナC4tという)と積載容積が4m3のコンテナ(以下、コンテナC2tという)とを入れ替えて積載できるようにした構造を備える。コンテナ脱着車両1の主要諸元や制動力は、コンテナC4tを積載して走行するように設計し、車体構造をコンテナC2tも積載できるように設計してある。コンテナC4t積載時とコンテナC2t積載時とでは積載状態が相違する(図25参照)。
【0043】
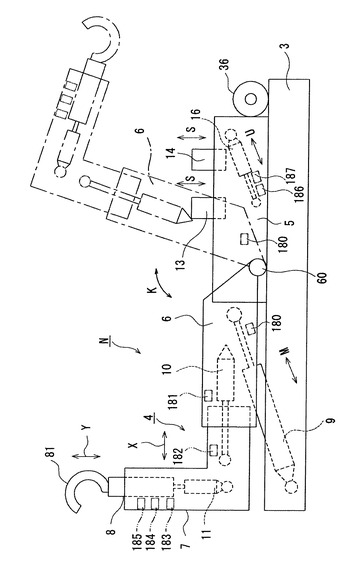
コンテナ脱着車両1は、図1に示す荷役フレームNを備える。荷役フレームNは、車体部2上に取り付けたメインフレーム3と、メインフレーム3に連結するとともに車体長手方向に回動し(図1の矢印K)、コンテナC2t及びC4tを脱着するキャリア部4と、を備える。メインフレーム3に車体長手方向に延びる形状のダンプフレーム5が連結する。キャリア部4は、ダンプフレーム5に対して回動するように接続して車体長手方向に延び出す支持アーム6と、支持アーム6に接続し車体長手方向に延び出すとともに支持アーム6の軸方向に沿ってスライドするスライドアーム7と、から構成する(図1参照)。スライドアーム7の上方に、スライドアーム7の軸方向に沿ってスライドする、コンテナC2t及びC4tの前方部と係合するためのフックアーム8が備えられている。荷役フレームNはさらに、支持アーム6を車体長手方向に起伏回動させるメインシリンダ9と、支持アーム6の軸方向に沿ってスライドアーム7をスライドさせるスライドシリンダ10と、スライドアーム7に対するフックアーム8のスライド量を制御するフックシリンダ11と、を備える。支持アーム6、スライドアーム7及びフックアーム8をメインシリンダ9、スライドシリンダ10,フックシリンダ11を使用して駆動することによりコンテナC2t及びC4tを脱着する構造である。
【0044】
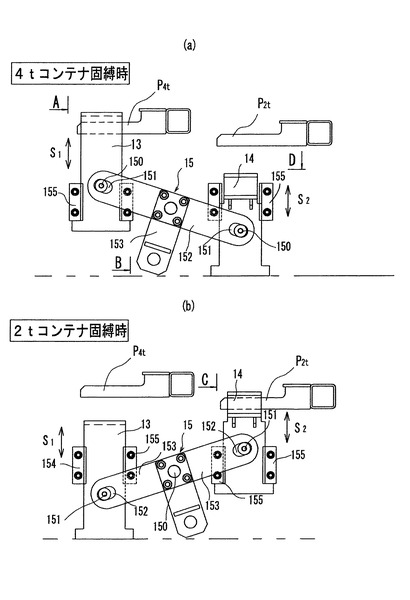
コンテナ脱着車両1にコンテナC2t又はC4tを積載し走行する際、車体の走行安定性を確保するため、図15〜図18に示す通り、ダンプフレーム5に固縛装置12を設けている。固縛装置12は、矢印Sの方向に昇降する可動式の第1固縛部13及び第2固縛部14と、それらを連結する連結部15と、連結部15を駆動する固縛シリンダ16(矢印U方向に伸縮)と、を備える。第1固縛部13はコンテナC2tの後方の底面に車体長手方向に突出するように形成した2tコンテナ用ピン(以下、ピンP2tという)を固縛する。同様に、第2固縛部14は4tコンテナ用ピン(以下、ピンP4tという)を固縛する。
【0045】
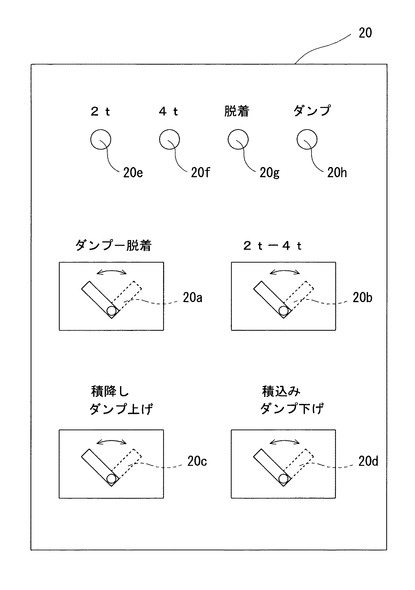
図19に示す各種シリンダメインシリンダ9,スライドシリンダ10,フックシリンダ11,固縛シリンダ16,ダンプ・ロックシリンダ54を作動制御する油圧装置17、各種センサ18、及び、図22及び図23に示す通りセンサ信号を入力し油圧回路を制御する制御装置19、図24に示す各種スイッチを備える操作部20と、を設けている。その他、アウトリガー22を備える。以下、コンテナ脱着車両1の詳細構造を説明する。
【0046】
メインフレーム3について図6及び図7を参照して説明する。メインフレーム3は、平面視にて枠状に形成し、左右一対の側フレーム30と、側フレーム30の前部を接続する前板31と、側フレーム30の中部を接続する中板32a,32b,32cと、側フレーム30の後部を接続する後板33を備える。後板33は左右一対の横軸支持部34を車体幅方向に間隔をおいて備えている。一対の横軸支持部34にはそれぞれ横軸35を横方向に水平に装着する。横軸35に後述するダンプ中心軸孔57を軸装し、横軸35の外側端部にローラ36を回転自在に軸架する。ローラ36はコンテナC2t又はC4tの底面に車体長手方向に延び出すように固定したレールR2t又はレールR4tを案内する。ローラ36の軸方向の断面は鼓型であり両端部にレール規制部36a及び36bを備える。前板31にメインシリンダ取付部37を形成する。中板32aに支持アーム受部38aを固定し、中板32cにダンプフレーム受部38b及びダンプフレーム受部38cを固定する。中板32bにダンプアーム反転防止ブラケット32eを取り付ける。
【0047】
図7(b)に示す通り、コンテナC2tとコンテナC4tのそれぞれの底壁面には、車体長手方向に延びる形状のレールR2t、レールR4tが左右に一対ずつ溶接等により取り付けられる。コンテナC4tとコンテナC2tとの外形寸法の違いに起因して、コンテナC2tにおける2本のレールR2tのスパン(レールゲージ)は、コンテナC4tのレールR4tのレールゲージよりも小さくなる。そして、本発明の実施にあたり、2t用レールR2tのレールゲージに合わせた側フレーム30と4t用レールR4tのレールゲージに合わせた側フレーム30とを別々に備えてもよいが、部品点数増及び構造の複雑化を招く。
【0048】
図6及び図7に示す通り、コンテナC2t,C4tのレールR2t、レールR4tに適した大きさの共通の側フレーム30を形成する。レールR4tの側フレーム30による左右方向の位置規制は、図5(c)に示す通りレールR4tの外側面とレール規制部39aの内側面との当接により規制する。レールR2tの側フレーム30による左右方向の位置規制は、図5(b)に示す通りレールR2tの外側面とレール規制部39bの外側面との当接により規制する。さらに、図7(b)に示す通り、レールR4tの位置は、レールR4tの外側面とレール規制部36aの内側面との当接によっても規制し、レールR2tの位置は、レールR2tの内側面とレール規制部36bの内側面との当接によっても規制する。
【0049】
レール規制部36a,36b,39a,39bでレールR2t、レールR4tの左右方向の動きを規制することにより、キャリア部4上のコンテナC4t,C2tの左右方向の位置ズレを防止する。レールR2tとレールR4tの案内経路を共用化するので、部品点数減及び構造の簡素化を図ることができる。
【0050】
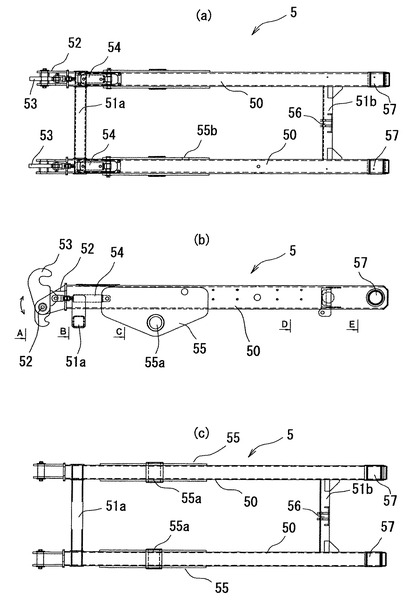
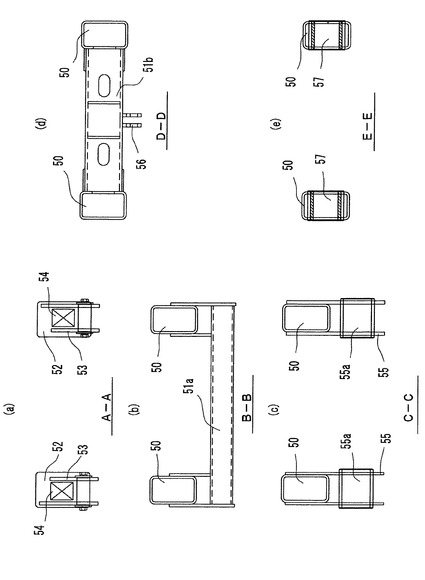
ダンプフレーム5について図8及び図9を参照して説明する。ダンプフレーム5はコンテナC2t又はC4tをダンプさせるのに使用されるものであり、メインフレーム3の後部領域に設け、左右一対の管状のフレーム支柱50と、フレーム支柱50を接続する車体横方向に延びるサポート51a及び51bと、フレーム支柱50の先端に形成するダンプ・アームヘッド52と、車体長手方向に回動するようにダンプ・アームヘッド52に軸着するフックプレート53と、フックプレート53を駆動するダンプ・ロックシリンダ54と、回動軸60を軸装する軸取付部55と、連結部15を軸着する固縛シリンダ取付孔56と、横軸35に軸着するダンプ中心軸孔57と、を備える。軸取付部55は、回動軸60を貫通させ保持するボス55aと、センサ取付部55bと、を備える。このダンプフレーム5は、横軸35の軸線の回りに車体長手方向に回動する。フックプレート53は、フック91にロックすると、ダンプフレーム5が支持アーム6とを一直線状に維持し、ダンプロックフレーム5のメインフレーム3へのロックを解除し、後に詳述するダンプ作動を行う。フックプレート53とフック91のロックを解除すると、ダンプロックフレーム5をメインフレーム3へロックし、コンテナCの脱着動作(積降動作、積込動作)を行う。
【0051】
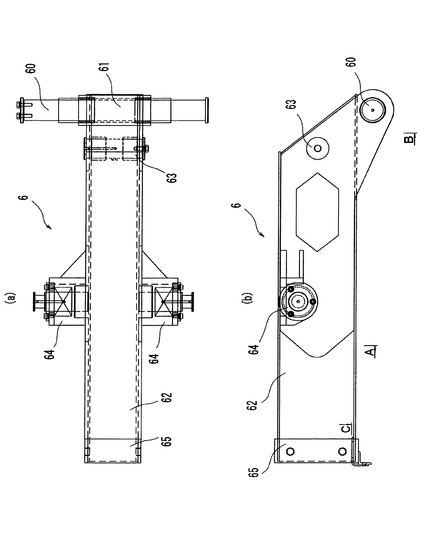
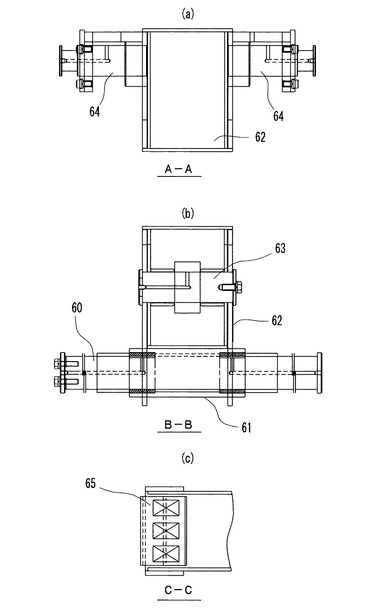
支持アーム6について図10及び図11を参照して説明する。支持アーム6は、両端部がフレーム支柱50に固定する回動軸60と、回動軸60を保持するボス61と、ボス61を端部に有する中空フレームのフレーム62と、スライドシリンダ10の基端部を軸着するシリンダ用取付部63と、左右一対のメインシリンダ9の先端部を組み付ける左右一対のシリンダ用ブラケット64と、スライドアーム7と接続する接続部65と、を備える。ダンプフレーム5の前端部寄りの中間部の左右には、支持アーム6の後端即ち基端を、回動軸60が、車体長手方向に起伏回動自在に軸支する。この支持アーム6は、ダンプフレーム5よりも幅狭の、前後に細長い方形状に形成し、その後部はダンプフレーム5の内側に納まるように車体長手方向に重なり合うが、その大部分はダンプフレーム5よりも前方に延長しており、その伏倒時には、支持アーム6の上面はダンプフレーム5よりも高い位置にある。
【0052】
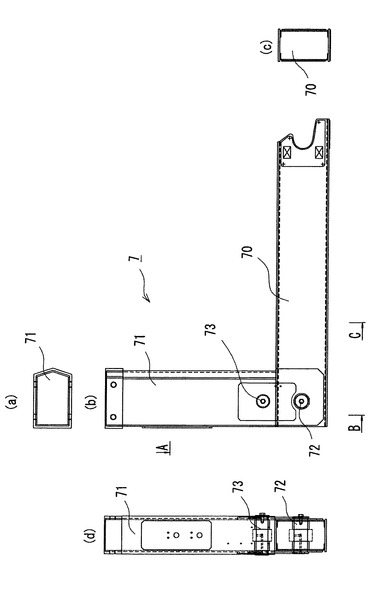
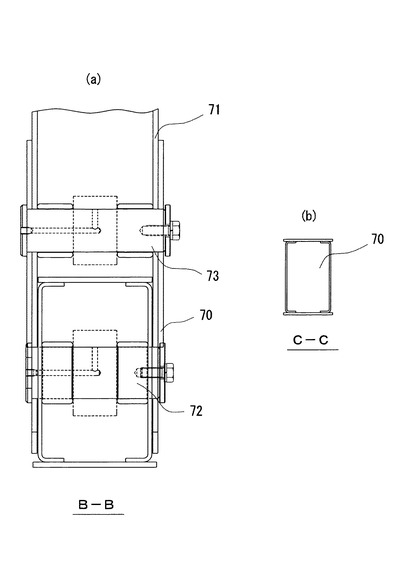
スライドアーム7について図12及び図13を参照して説明する。スライドアーム7は、側面視でL字形状に構成し、垂直方向に配置する横ケーシング70と、横ケーシング70と直交して接続するとともにフックシリンダ11を収容する縦ケーシング71と、横ケーシング70と縦ケーシング71とを連結する連結部72と、フックシリンダ11を取り付けるシリンダ取付部73と、から構成する。支持アーム6の前端部には、スライドアーム7が車体長手方向(図1中の矢印Xに示す方向)にスライド自在に連結する。スライドアーム7は、側面から見てL字状に形成する。
【0053】
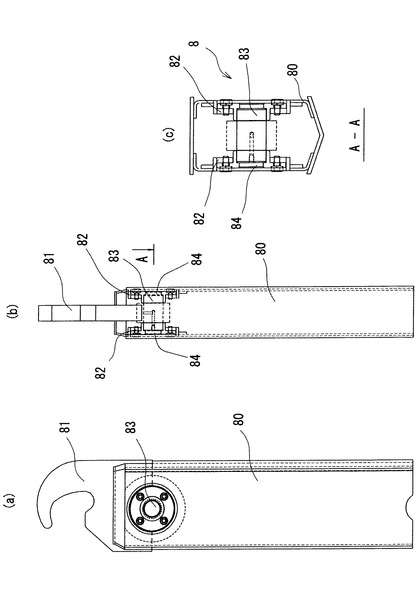
フックアーム8について図14を参照して説明する。フックアーム8は、スライドアーム・ケーシング71に収容するケーシング80と、ケーシング80の上端に固定したフック81と、フックシリンダ11の上端部を取り付けるボス82、ピン83及びニップル84と、を備えたものである。又、スライドアーム7の上端には、フックアーム8が上下方向(図1中の矢印Yに示す方向)にスライド自在に連結する。このフックアーム8は、コンテナC4t,C2tの前面上部に設けた掛止部Tに係脱自在である。
【0054】
コンテナ脱着車両1の車体部2上に搭載するコンテナC4t,C2tは上面開放の箱状に形成し、後面はリアゲートGが開閉し、その前壁上部には、フック81と係脱する掛止部Tが設けられ、底部の後端部にはキャスタよりなる複数の車輪Wが軸支する。コンテナC4t,C2tは上面が開放していないタイプでもよく、又、コンテナC4t,C2t内の内容物をプレスするプレス機構を備えたものでもよい。
【0055】
コンテナC4t,C2tに設けられてフック81と係脱する掛止部Tの位置は、コンテナC2tとコンテナC4tとで異なる位置となる。スライドシリンダ10の作動によりスライドアーム7を車体長手方向にスライド移動させることで、フックアーム8の位置を車体長手方向(図1中の矢印Xに示す方向)に可変とする。フックシリンダ11の作動によりフックアーム8の位置を上下方向(図1中の矢印Y方向)に可変とする。コンテナC4t,C2tの相違する掛止部Tの位置に合わせて、フックアーム8の位置を前後上下に移動調節するので、掛止部Tの位置が異なる複数種類のコンテナC4t,C2tを1種類のコンテナ脱着車両1に入れ替え積載する。
【0056】
メインシリンダ9について図1、図2を参照して説明する。メインシリンダ9は、左右一対が車体長手方向に延び出す油圧シリンダである。メインシリンダ9の先端は、支持アーム6の外側にある一対のブラケット64に軸着する。このメインシリンダ9の伸縮作動により(図1の矢印M)、キャリア部4をコンテナ脱着車両1の車体長手方向に起伏回動させる。
【0057】
スライドシリンダ10について図1、図2を参照して説明する。支持アーム6の前部の内部にスライドアーム7の後部が装入し、油圧シリンダよりなるスライドシリンダ10がスライドアーム7を駆動するよう連結する。スライドシリンダ10の伸縮作動により、スライドアーム7が支持アーム6に対して車体長手方向(図1中の矢印X方向)にスライドする。
【0058】
フックシリンダ11について図1、図2を参照して説明する。スライドアーム7の直立部の内部には、フックアーム8の高さを調整する油圧シリンダよりなるフックシリンダ11が配置する。フックシリンダ11の伸縮作動により、フックアーム8をスライドアーム7に対して上下方向(図1中の矢印Y方向)にスライド移動させる。
【0059】
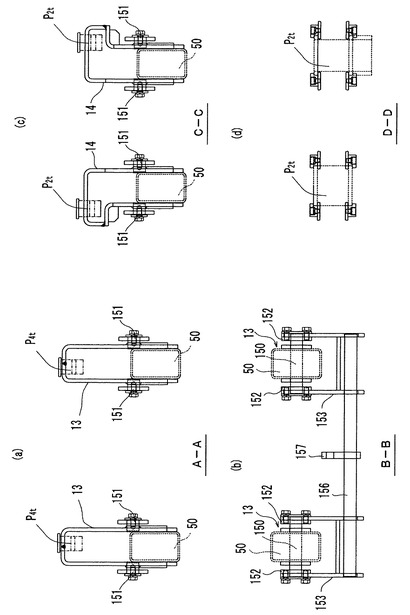
固縛装置12について図15〜図18を参照して説明する。固縛装置12は、コンテナC4tを固縛する左右一対の第1固縛部13と、コンテナC2tを固縛する左右一対の第2固縛部14と、第1固縛部13と第2固縛部14とを連結する連結部15と、連結部15を駆動し第1固縛部13と第2固縛部14とをシーソーのように昇降駆動する固縛シリンダ16と、を備え、固縛及び固縛解除を行ない、脱着動作時にコンテナC2t及びC4tと、第1固縛部13又は第2固縛部14との衝突を防止する。ピンP4tとピンP2tは、図16及び図17に示す通り、車体長手方向の位置、高さ、左右間隔のいずれも相違するからである。
【0060】
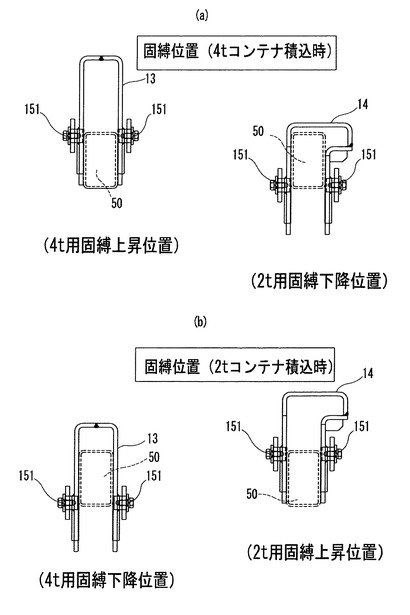
連結部15及び固縛シリンダ16の作動により、図16(a)、図17(a)及び図18(a)に示す通り、コンテナC4tを積載し固縛する場合には、第1固縛部13が上昇位置にあるときは、第2固縛部14が下降位置にあり、第1固縛部13がコンテナC2tの底壁に形成するピンP4tを固縛し、ピンP4tが第2固縛部14と衝突することを回避する。図16(b)、図17(b)及び図18(b)に示す通り、コンテナC2tを積載し固縛する場合には、第1固縛部13が下降位置にあるときは(矢印S1)、第2固縛部14が上昇位置にあり、第2固縛部14がコンテナC2tの底壁に形成するピンP2tを固縛し(矢印S2)、ピンP2tが第1固縛部13と衝突することを回避する。
【0061】
図16に示す通り、第1固縛部13がピンP4tを車体長手方向の前方位置で固縛し、ピンP2tは車体長手方向の後方位置で固縛する。図17及び図18に示す通り、第1固縛部13がピンP4tをフレーム支柱50の位置を基準として車体幅方向の内側位置で固縛し、ピンP2tはフレーム支柱50の位置を基準として車体幅方向の外側位置で固縛する。第1固縛部13と、第2固縛部14は、フレーム支柱50の車体長手方向に間隔をおいて配設し、第1固縛部13が第2固縛部14よりも前方にある。
【0062】
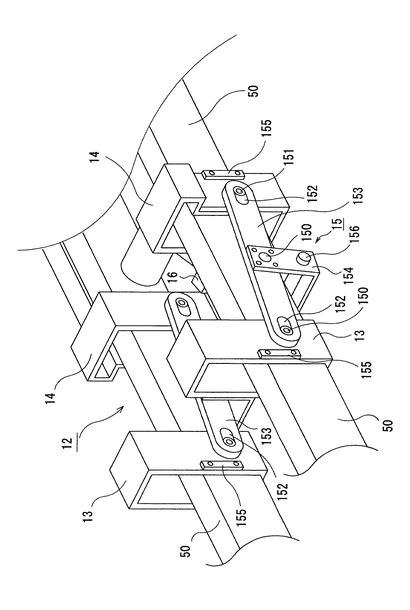
連結部15は、右側部分が車体長手方向に延び右側の第1固縛部13及び第2固縛部14を貫通する前後一対の横軸150と、第1固縛部13及び第2固縛部14の外面略中央部に設けた前後2対の突出部151と、突出部151を遊嵌する楕円孔152を両端部に備え車体幅方向に延びた前後一対のレバー153と、レバー153の中間部を連結するU型の連結板154と、第1固縛部13と第2固縛部14にそれぞれ形成する前後一対の昇降案内部155と、備える。横軸150はレバー153の中央部と、連結板154の上端部とに連結する。左側部分も右側部分と左右対称に形成し同様の構造とする。左右の連結板154を連結する連結棒156を車体幅方向に備える。連結棒156の中央部に固縛シリンダ16と連結する固定部157を備える。
【0063】
第1固縛部13又は第2固縛部14を固縛状態とすると、コンテナC4t,C2tは上下方向、左右方向、後方向への移動が規制する。コンテナ脱着車両1がコンテナC4t,C2tを積み込んで走行する最中に急ブレーキをかけた場合等であっても、走行コンテナC4t,C2tがキャリア部4に対する前方へのズレ、上下のズレ、左右のズレを規制する。
【0064】
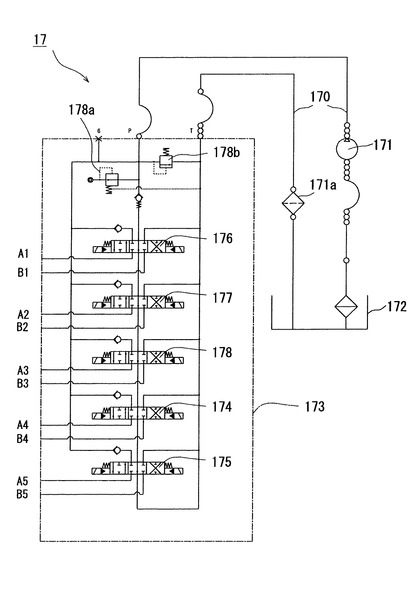
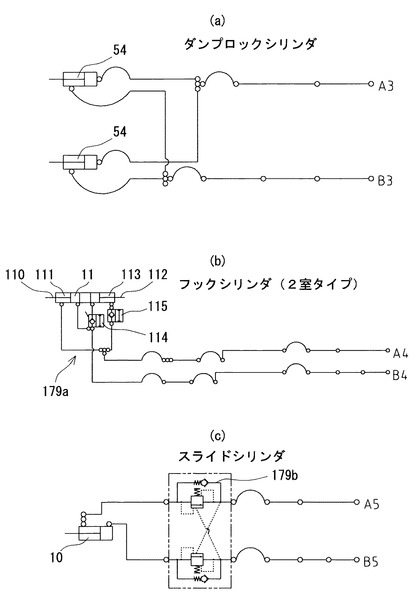
油圧装置17について図19〜図21を参照して説明する。油圧装置17は、コンテナ脱着車両1の走行用エンジンによりPTOを介して駆動する油圧ポンプ171と、ラインフィルタ171aと、油溜172と、作動油路170と、制御弁ユニット173と、を備える。制御弁ユニット173内には、いずれも3位置電磁切換弁よりなる、第1〜第5切換弁174、175、176、177及び178、弁178a、弁178b、が設けられ、第1切換弁174の入口ポートは作動油路170に接続し、又その出口ポートは、電磁式バルブ179aを介してフックシリンダ11に接続する。フックシリンダ11は、図21(b)に示す通り、第1ロッド110を有する第1シリンダ111と、第2ロッド112を有する第2シリンダ113とが隔壁を介して直列に接続し、第1ロッド110と第2ロッド112とが同一軸線上の外側に配置される。第1電磁チェック179aは、第1シャットオフ・バルブ114と、第2シャットオフ・バルブ115とを備える。コンテナC4tを脱着するとき、第1シャットオフ・バルブ114と、第2シャットオフ・バルブ115とは閉じる。第1ロッド110のみが伸長し、第2ロット112が短縮する。コンテナC2tを脱着するとき、フックアーム8の伸長前(図30(a)参照)は、第1シャットオフ・バルブ114と第2シャットオフ・バルブ115とが閉じ、第1ロッド110、第2ロット112ともに短縮し、フックアーム8の伸長後(図30(a)参照)は、第1シャットオフ・バルブ114と第2シャットオフ・バルブ115とが開き、第1ロッド110と第2ロット112はともに伸長する。ダブルロッド構造とシャットオフバルブにより、コンテナC4tの位置を確実に停止でき、停止位置が一層安定化する効果がある。る。
【0065】
フックシリンダ11は、コンテナC2tを脱着するときに短縮し、且つ、コンテナC2tを回動させる途中で最大に伸長する。コンテナC4tをキャリア部4に積載させるときに短縮から伸長に変化する。
【0066】
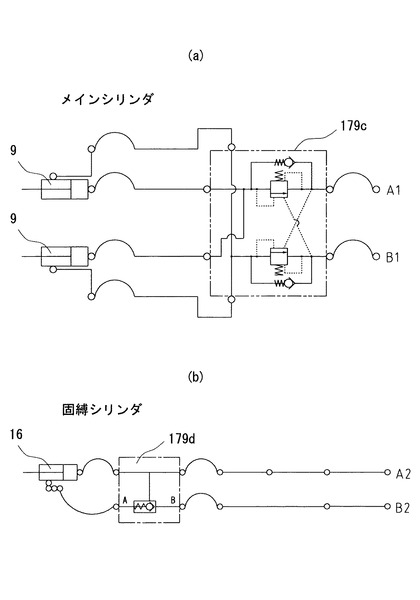
第2〜第5切換弁175〜178の入口ポートは作動油路170に並列に接続し、第2切換弁175の出口ポートは電磁式チェックバルブ179b(図21(c)参照)を介してスライドシリンダ10に接続し、第3切換弁176の出口ポートは電磁式チェックバルブ179c(図20(a)参照)を介してメインシリンダ9に接続し、パイロット・オペレート・チェック弁179dは固縛シリンダ16(図20(b)参照)に接続し、第5切換弁178の出口ポートはダンプ・ロックシリンダ54(図21(a)参照)に接続する。
【0067】
フックシリンダ11の伸縮制御は第1切換弁174の切換制御が行い、スライドシリンダ10の伸縮制御は第2切換弁175の切換制御が行い、メインシリンダ9の伸縮制御は第3切換弁176の切換制御が行い、固縛シリンダ16の伸縮制御は第4切換弁177の切換制御が行い、ダンプ・ロックシリンダ54の伸縮制御は第5切換弁178の切換制御が行なう。
【0068】
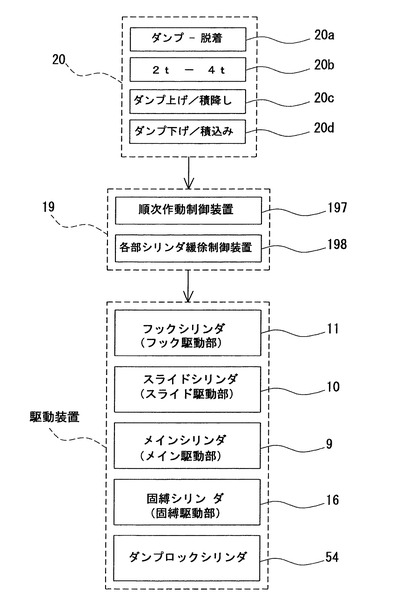
図23に示す通り、コンテナ脱着車両1による荷役作業の作動制御のブロック図が示し、荷役操作スイッチ20a〜20dと、スイッチの選択的ON作動信号により第1〜第5切換弁174〜178の作動を制御する制御装置197,198とを備える。制御装置197,198が制御する第1〜第5切換弁174〜178の作動により、駆動装置としての各種シリンダが伸縮作動する。
【0069】
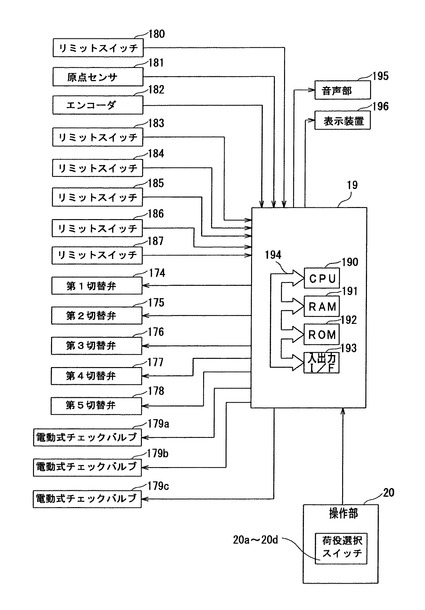
各種センサ18は、メインシリンダ9の停止位置を検出するリミットスイッチ180、スライドアーム7の原点を検出する原点センサ181、スライドアーム7のロッドの位置を検出するエンコーダ182、フックシリンダ11の複数の位置を検出するリミットスイッチ183〜185、固縛シリンダ16の昇降位置を検出するリミットスイッチ186〜187を備える。
【0070】
制御装置19について図22を参照して説明する。制御装置19は、CPU190、RAM191、ROM192、入出力インタフェース193がバス194により相互に接続し、コンテナ脱着車両1の油圧制御、モータ制御等を司る。各種センサ18の各種検出信号が入出力インタフェース193を介して入力する。操作部20の各種スイッチ20a〜20dの押し下げに応答して各種の信号が入出力インタフェース193を介して入力する。制御装置19からの制御信号を入出力インタフェース193を介して、第1切換弁174〜第5切換弁178、電磁式チェックバルブ179a〜179cに出力する。制御装置19は音声部195と、表示装置196に接続される。音声部195により、「2tモード」、「4tモード」、「脱着」、「ダンプ」等のメッセージにより操作者に切換を喚起する。
【0071】
順次作動制御装置197は、スライドアーム7のロッドの位置検出方式につきエンコーダ182(例えばワイヤ式エンコーダ)を用い、その位置を数値制御する回路を備え、リミットスイッチ(図示略)は確認用とする。スライドアーム7のスロー動作を追加し、目標位置に接近したとき、速度を落とし、精度を上げて停止させる。エンコーダ制御に代えて、エンコーダ制御と同様の効果がある機械的ストッパ(図示略)でもよい。コンテナC2tの待機位置に機械的ストッパを設ける。ロードはスプリングにてリターンする。動作は、スライドアーム7がコンテナC2tの位置に下がると爪がロードを押しストッパが下がり、位置固定金具に差し込まれ固定する。
【0072】
操作部20には、ダンプ−脱着切換スイッチ20a、2t−4t切換スイッチ20b、積降し/ダンプ上げ切換スイッチ20c、積込み/ダンプ下げ切換スイッチ20d、LED20e〜20h等がある。スイッチ20aに対応し、切換え時に自動的にフックプレート53とフック91とのロック、ロック解除を切り替えるように設定し、ダンプ信号、信号を出力する。スイッチ20bに対応し、2t−4tの動作を切り替えるように設定してある。操作部20から制御装置19に切換え信号を送信し、制御装置19は、油圧装置17に、2t脱着信号、4t脱着信号、2tダンプ信号、4tダンプ信号を出力する。
【0073】
制御装置19は、順次作動制御装置197と、各部シリンダ緩除制御装置198とがあり、プログラマブル・コントローラ等により構成する。順次作動制御装置197は、前述したコンテナC4tにおける一連の積降方法、又は、コンテナC2tにおける一連の積降方法となるように、各種シリンダ(メインシリンダ9、スライドシリンダ10、フックシリンダ11、固縛シリンダ16、ダンプ・ロックシリンダ54)が順次作動するように制御する。各部シリンダ緩除制御装置198は、主にメインシリンダ9への作動油の流入量を減少させ、コンテナC4t,C2tの積み降ろしの際における、コンテナC4t,C2tの接地衝撃等を緩和させるよう制御する。
【0074】
アウトリガー22は、コンテナC4t,C2tを積降あるいはダンプさせるとき、伸縮作動し、地面Jからの反力を受けることでコンテナ脱着車両1の姿勢を安定させる。
【0075】
〔本実施形態の動作〕
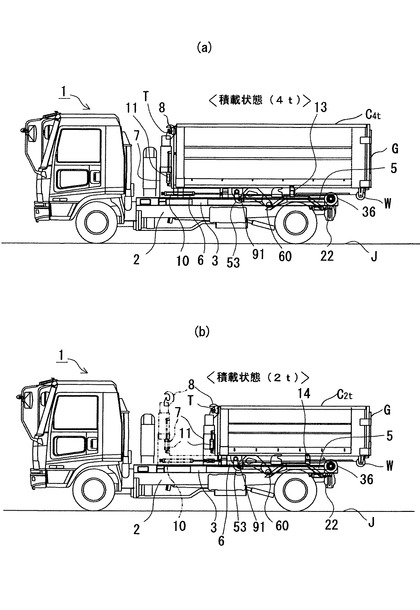
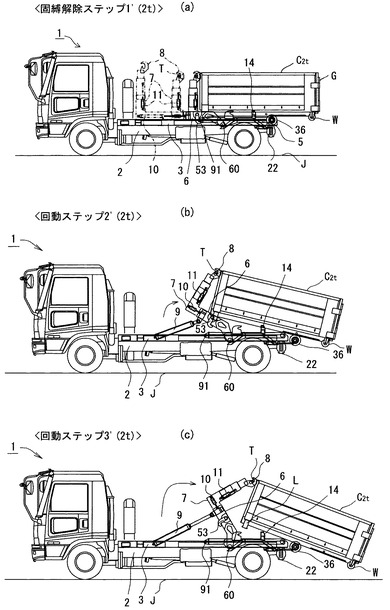
次に本実施形態のコンテナ脱着車両1の動作を説明する。図25(a)は、コンテナC4tのピンP4tを第1固縛部13が固縛し走行可能な状態(以下、積載状態という)を示し、図25(b)は、同様にコンテナC2tの積載状態を示す。なお、コンテナ脱着車両1の各部の形状は若干異なる。
【0076】
<積載状態(4t)について>
図25(a)に示すコンテナC4tの積載状態では、スライドシリンダ10が伸長することによりスライドアーム7が最前方位置(図28の第1位置)にあり、第1固縛部13がピンP4tを固縛し、フックアーム8の位置がコンテナC4tの掛止部Tの高さと合うように高さを調整され、フックアーム8は掛止部Tと係合する。
【0077】
<積載状態(2t)について>
図25(b)の実線及び図38の二点鎖線に示すコンテナC2tの積載状態では、スライドシリンダ10の収縮によりスライドアーム7が中間位置(第3位置)にある。第2固縛部14がピンP2tと係合するとともに、フックプレート53がフック91と係合し、フックアーム8の位置がコンテナC2tの掛止部Tの高さと合うように位置調整し、フックアーム8は掛止部Tと係合する。フックアーム8の位置調整は、フックシリンダ11を収縮させてフックアーム8を最下方位置にすることによって行う。
【0078】
積載状態からダンプするときはフックプレート53とフック91とがロックする。積載状態から脱着するときは、フックプレート53とフック91とがロック解除する。
【0079】
2tと4tではフックアーム8の位置が相違するため、フックアーム8の位置を調整する必要がある。前記2つの積載状態に対応させるため、リミットスイッチ183、184をそれぞれ設けてある。リミットスイッチ183はコンテナC2tに、リミットスイッチ184はコンテナC4tにそれぞれ対応する(図1参照)。リミットスイッチ185を設ける理由は、2tコンテナの脱着時に、フックシリンダ11が短縮しフックアーム8が下方に退避したままの状態であると、コンテナの脚部が車体と衝突するなどのおそれがあり、脱着動作の途中の位置でフックシリンダ11の長さを調整する必要があるためである。
【0080】
上述した本実施形態の構造によれば、スライドシリンダ10の作動によりスライドアーム7を支持アーム6に対して車体長手方向にスライドすることで、フックアーム8の位置を車体長手方向(図1中の矢印Xに示す方向)に移動調節する。フックシリンダ11の作動によりフックアーム8の位置をスライドアーム7に対して上下方向にスライド移動させることで、フックアーム8の位置を上下方向(図1中の矢印Yに示す方向)に移動調節できる。フックアーム8と係合する掛止部Tの位置が異なる複数種類のコンテナC4t,C2tを、1種類のコンテナ脱着車両1に入れ替えて積載する。
【0081】
図26〜図33を参照して、コンテナ脱着車両1と地面Jとの間でコンテナC4t,C2tに関する脱着方法を説明する。脱着方法にはコンテナC4t,C2tの積降方法と積込方法とがあるが、積降方法を説明する。積込方法は積降方法とは逆のステップとなるので説明は援用する。なお、コンテナC4tの積み降ろしが完了するまでは、フックアーム8と掛止部Tとが掛止したままの状態である。
【0082】
<積降方法(4t)について>
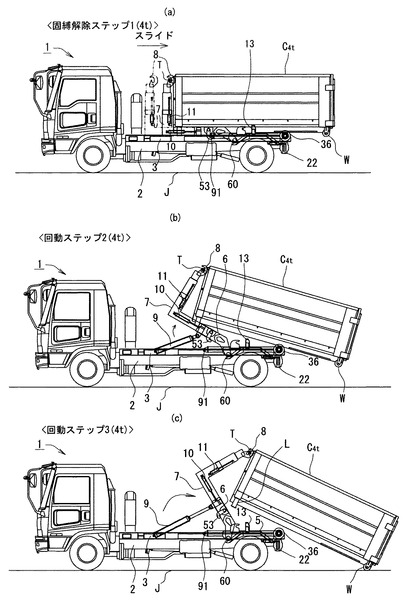
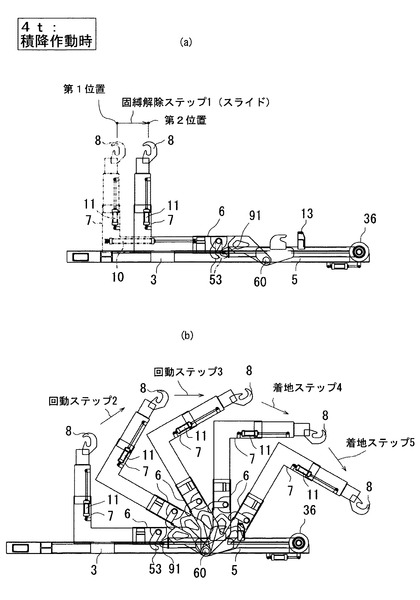
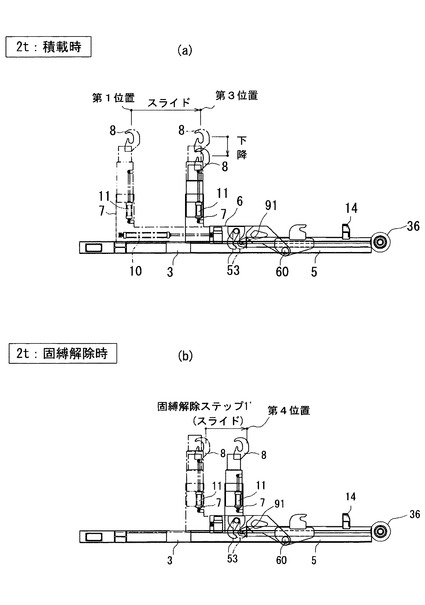
コンテナC4tの積降方法を図26乃至図28(a)(b)を用いて説明すると、先ず、図26(a)の二点鎖線に示す積載状態において、スライドシリンダ10を短縮作動させることにより、スライドアーム7とフックアーム8とを図26(a)の実線位置まで後方移動させる。図28(a)で第1位置から第2位置にスライドさせることに対応する(以下、固縛解除ステップ1という)。図28(a)中の二点鎖線は第1位置にあるスライドアーム7及びフックアーム8を示し、図28(a)中の実線は第2位置にあるスライドアーム7及びフックアーム8を示す。固縛解除ステップ1の間、コンテナC4tのレールR4tは側フレーム30上を車体後方に水平方向にスライドする。固縛解除ステップ1により、第1固縛部13に対しピンP2tが車体後方に移動し、固縛を解除する。
【0083】
コンテナC4t,C2tがキャリア部4上に引上げられてスライドシリンダ10により前進位置(例えばコンテナC4tの場合には、図26(a)に二点鎖線で示す位置)に位置付けられたときにピンP4t,P2tが第1固縛部13、第2固縛部14に係合する。一方、コンテナC4t,C2tがキャリア部4上においてスライドシリンダ10により後退位置(例えば4t用コンテナの場合には、図26(a)に実線で示す位置)に位置付けられたときにピンP4t,P2tが第1固縛部13、第2固縛部14から離脱するように構成する。
【0084】
次に、図26(b)に示す通りメインシリンダ9を伸長作動させることにより、ダンプフレーム5を回動させることなくキャリア部4が車体後方に起立回動する(図28(b)参照)。コンテナC4tのレールR4tはローラ36上をスライドして後方に移動する(以下、回動ステップ2という)。さらにメインシリンダ9を伸長作動させることにより、図26(c)に示す通り、コンテナC4tが車体部2から浮き上がるとともに、コンテナC4tの車輪Wが地面Jに着地する(以下、回動ステップ3という)。
【0085】
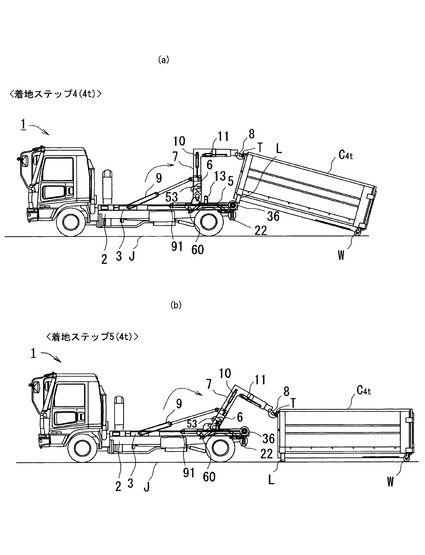
さらにメインシリンダ9を伸長作動させることにより、図27(a)及び図28(b)に示す通り、コンテナC4tはフックアーム8が支持しながら、後方に走行移動する(以下、着地ステップ4という)。このとき、ブラケット64が第1固縛部13に衝突しないように、第1固縛部13を下降させ、第2固縛部14を上昇させて安全性を高める。このとき支持アーム6の水平からの角度は120〜140°が好ましい。メインシリンダ9を伸長作動させることにより、図27(b)及び図28(b)に示す通り、コンテナC4tの車輪W及び脚部Lが地面Jに着地する(以下、着地ステップ5という)。コンテナC4tのコンテナ脱着車両1からの積降方法が完了する。地面JのコンテナC4tをコンテナ脱着車両1上に積載するには、前記ステップ1〜5を逆に行う。
【0086】
<積降方法(2t)について>
コンテナC2tの積降方法を図29〜図33を用いて説明する。積み降ろしが完了するまでフックアーム8と掛止部Tとが係合したままの状態である。図25(b)及び図32(a)の積載状態に示す通り、スライドアーム7及びフックアーム8の位置は第1位置から第3位置に変更する。この第3位置は、第1位置、第2位置よりも後方に位置が設定する。(図3参照)。フックシリンダ11を収縮する作動をさせ、フックアーム8を下降させ、点線位置から実線位置に下降させ、掛止部Tの高さに合致するように高さも調整する。第3位置ではコンテナC2tが積載状態となっている。第3位置を始点として積降方法(2t)を行う。
【0087】
図29(a)に示す通り、第3位置からスライドシリンダ10を収縮作動させることにより、スライドアーム7とフックアーム8を後退させて、スライドシリンダ10を収縮作動させ、スライドアーム7とフックアーム8を第3位置から第4位置まで後退させる(図32(b)参照)。コンテナC2tのレールR2tは側フレーム30及びローラ36上をスライドして後方に水平移動する。固縛解除ステップ1’により、第2固縛部14とピンP2tとの固縛を解除する。
【0088】
次に図29(b)(c)に示す通りメインシリンダ9を伸長作動させ、支持アーム6、スライドアーム7及びフックアーム8が軸60を中心に車体長手方向に回動する(回動ステップ2’、回動ステップ3’)。コンテナC2tは側フレーム30及びローラ36上を後方に移動する。車輪Wは地面Jから浮いた状態で、フックアーム8とローラ36でコンテナC2tを支持する。
【0089】
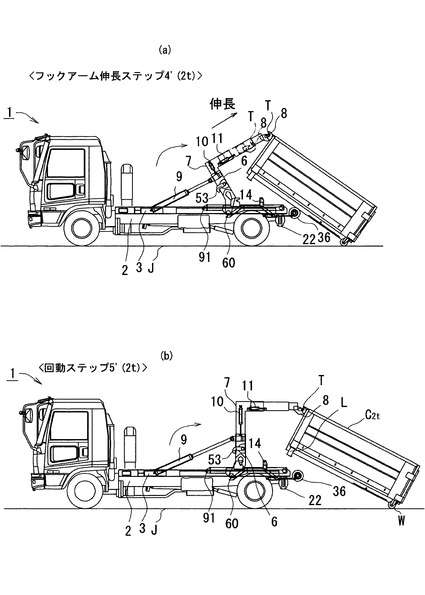
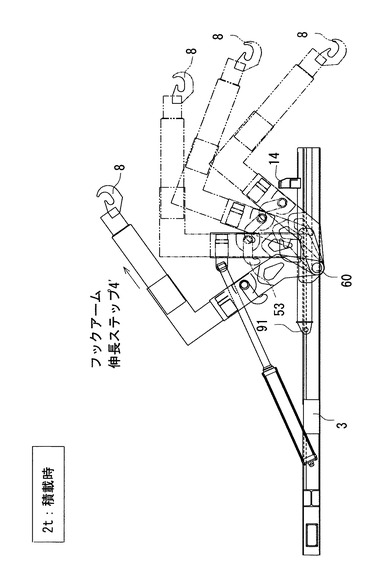
図29(c)から図30(a)に示す位置までメインシリンダ9を伸長作動させメインシリンダ9を停止する。このときの支持アーム6の角度は水平から60°〜70°(図面は65°)が好ましい。この角度位置は後輪Lが接地し始める位置に設定してある。この位置から、フックアーム8を短縮させたままメインシリンダ9を伸長させると、コンテナC2tの前脚Lがローラ36と衝突する、フックアーム8に負荷がかかる等の種々の不都合がある。そこで、フックシリンダ11を伸長作動させ、フックアーム8を図30(a)の二点鎖線位置まで斜め上方に向けてスライドさせ、その後の旋回半径を大きくする(フックアーム伸長ステップ4’)。フックシリンダ11の伸長動作に代えて、又は、これに加えてスライドシリンダ10の伸長作動でもよい。
【0090】
図30(b)の位置からメインシリンダ9を伸長作動させると、コンテナC4tがローラ36から浮き上がり、コンテナC4tの車輪Wが地面Jに着地する(以下、回動ステップ5’という)。
【0091】
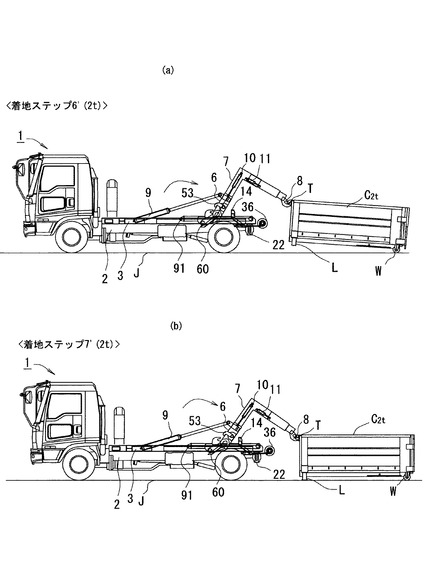
図30(b)の位置からメインシリンダ9を伸長作動させると、車輪Wが転がりながらコンテナC2tが後方に移動する(着地ステップ6’)。
【0092】
図31(a)の位置からメインシリンダ9を伸長作動させることにより、図31(b)に示す通り、コンテナC2tの車輪W及び脚部Lが地面Jに着地する(着地ステップ7’)。コンテナC2tのコンテナ脱着車両1からの積み降ろし作動が完了する。地面JのコンテナC2tをコンテナ脱着車両1上に積載するには、前記ステップ1’〜7’を逆に行なう。
【0093】
<ダンプ作動(4t、2t)について>
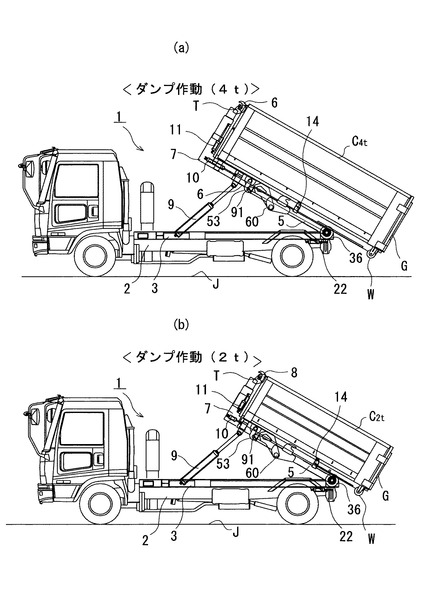
コンテナC4t,C2tに関しコンテナ脱着車両1のダンプ動作を説明すると、図25(a)(b)に示す積載状態において、ダンプ・ロックシリンダ54を伸長させると、フックプレート53がフック91と係合し、ダンプフレーム5と支持アーム6を一直線上にロックする。図34(a)(b)に示す通り、メインシリンダ9を伸長させると、キャリア部4は一体となって横軸35を中心として後方に回動し、コンテナC4t,C2tをダンプ上げし、コンテナC4t,C2t内の収容物を外部に排出する。又、メインシリンダ9を収縮させれば、コンテナC4t,C2tをダンプ下げして車体部2上にキャリア部4を降ろす。ダンプ作動時には固縛装置12はピンP2t又はP4tを固縛する。
【0094】
<実施形態の効果>
フックアーム8をスライドアーム7に対して伸縮することにより、コンテナの掛止部Tの位置に合わせて、フックアーム8の位置を調節できるので、1種類のコンテナ脱着車両1に入れ替えて積載できる。1種類のコンテナ脱着車両1で様々なニーズに対応できるので、利便性が高くなり、保険料、車検費用、人件費等のコスト削減、駐車スペースの削減ができる。
【0095】
1種類のコンテナ脱着車両で兼用できるので、新たな用途が拡大する。例えば、コンテナ脱着車両1にコンテナC2tを積載し、コンテナC2tを地面においたコンテナC4tの中に積み降ろし、コンテナC4tを反対側から積載して客先まで運搬することで、1種類のコンテナ脱着車両1で2輌のコンテナC2tを一度に運搬できる。
【0096】
コンテナC4t,C2tの脱着の際、フックアーム8をスライドアーム7に対して伸縮することで、コンテナコンテナC4t,C2t等からフックアーム8に加わる衝撃からフックアーム8を保護し、コンテナの脱着の際に行うキャリア部4の回動動作を円滑にできる。
【0097】
固縛装置12の作動により、コンテナC4t,C2tの脱着に際し、固縛装置12と、コンテナC4t,C2t或いはキャリア部4との衝突を回避できる。コンテナC4t,C2tの固定を確実にし、コンテナ脱着車両1の走行中の安全性を高める。
【0098】
スライドシリンダ10を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させるので、いずれのコンテナC4t,C2tを適用させる場合であっても、スライドシリンダ10の動きを同一の動きにできるので、固縛或いは固縛解除の構成が簡素になる。車体の横揺れに対して強くなる。
【0099】
操作部20の操作により、自動的にフックプレート53のフックのロック、ロック解除動作を行うので、操作が容易になり、安全性が高くなる。
【0100】
第1固縛部13と第2固縛部14とを、シーソー構造を備える連結部15が連結し、一方の固縛部と他方の固縛部が逆方向に移動するので、固縛シリンダ16の本数を低減でき、制御装置19の構成も簡素にでき、精密な退避動作が可能となる。
【0101】
リミットスイッチ180及び原点センサ181を備えるので、スライドシリンダ10を1本に限定し油圧回路を簡単な構造にし、センサの個数を低減しつつ精密なスライドシリンダ10の位置制御が可能となる。
【0102】
操作部20の操作スイッチの数を低減し、脱着動作、ダンプ動作及び固縛動作の複雑な動きをワンタッチの切換によって簡単に操作することができるので、操作者の負担を軽減できる。
【0103】
≪第2実施形態≫
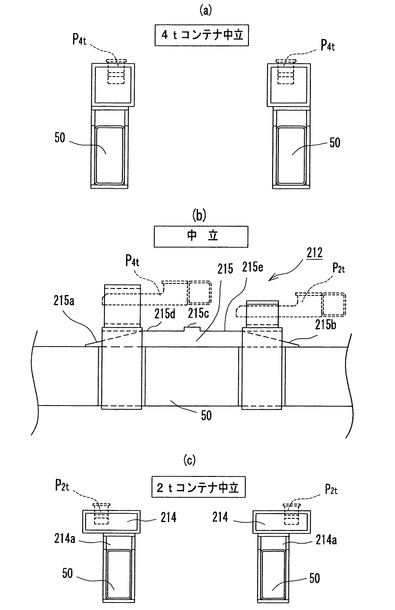
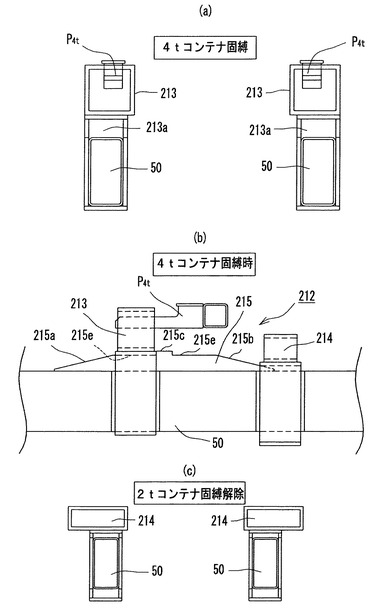
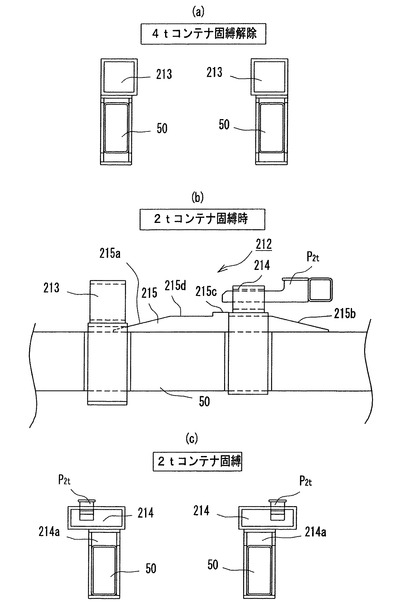
第2実施形態のコンテナ脱着車両1の固縛装置212について図35〜図37を参照して説明する。この固縛装置212は、車体長手方向にスライドすることで固縛又は固縛解除する構造である。固縛装置212は、ピンP4tを固縛する筒状の第1固縛部213と、ピンP2tを固縛する筒状の第2固縛部214と、フレーム支柱50上を車体長手方向に移動することで、ピンP4tとピンP2tとを交互に固縛をする固縛スライダ215と、固縛スライダ215を駆動する固縛シリンダ(図示略)と、を備える。第1固縛部213、第2固縛部214は自由に昇降できるように保持部材(図示略)が保持する。固縛スライダ215は、車体長手方向の前方に前方に傾斜する傾斜面215aと、車体長手方向の後方に後方に傾斜する傾斜面215bと、上面に上方に突出する突部215cとを備える。傾斜面215aと突部215cの間に平坦部215d、突部215cと傾斜面215bとの間に平坦部215eを備える。第1固縛部213の下部には隙間213aが形成する。第2固縛部214の下部には隙間214aが形成する。図35は固縛スライダ215が中立位置(固縛解除状態)にあるとき、突部215cが第1固縛部213と第2固縛部214の中間に位置する。対応するピンの位置は点線で示す。図36はコンテナC4tの固縛時であり、固縛スライダ215が車体長手方向の前方にスライドし、固縛スライダ215の前方部が隙間213aに差し込まれて、第1固縛部213がロックする。このとき第2固縛部214は自重で降下する。図37はコンテナC2tの固縛時であり、固縛スライダ215が車体長手方向の後方にスライドし、固縛スライダ215の後方部が隙間214aに差し込まれて、第2固縛部214がロックする。このとき第1固縛部213は自重で降下する。なお、第2実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0104】
≪第3実施形態≫
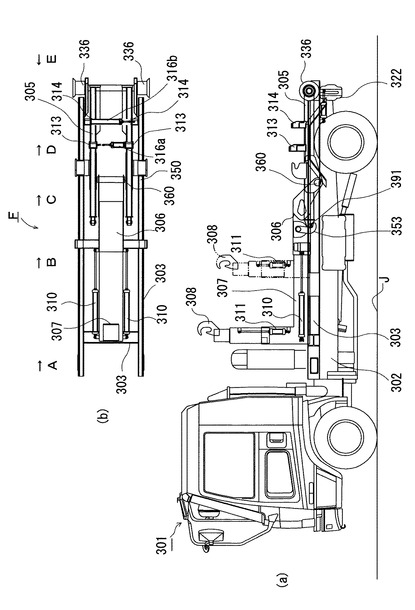
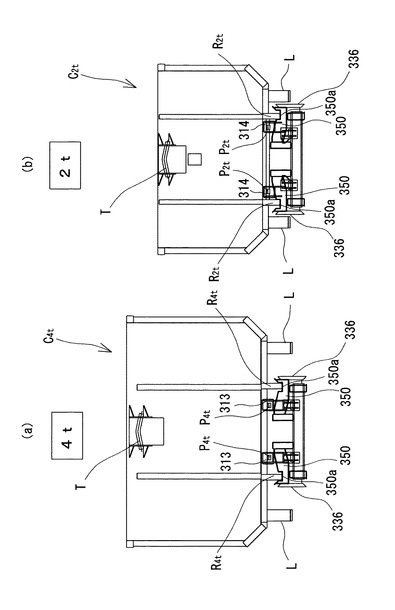
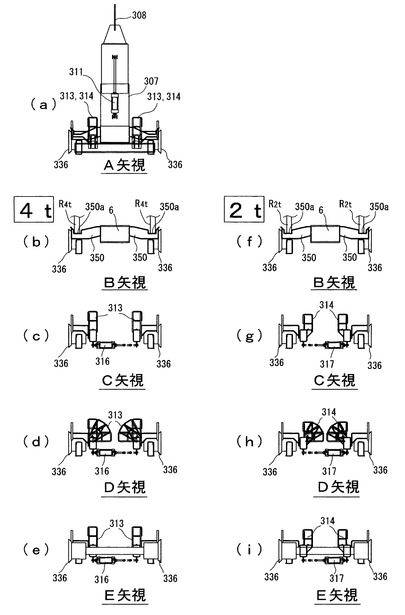
第3実施形態のコンテナ脱着車両1の回動式の固縛装置312を図38〜図40を参照して説明する。固縛装置312は、車体幅方向に回動しピンP4tを固縛する第1固縛部313と、車体幅方向に回動しピンP2tを固縛する第2固縛部314と、車体幅方向に設置し第1固縛部313を駆動する第1固縛シリンダ316と、車体幅方向に設置し第2固縛部314を駆動する第2固縛シリンダ317と、を備える。中立位置で第1固縛部313と第2固縛部314とは直立する。ピンP4tを固縛する場合には、第2固縛シリンダ317が伸長し第2固縛部314が倒伏状態にシフトし、第1固縛シリンダ316が短縮し第1固縛部313が起立状態にシフトし第1固縛部313がピンP4tを固縛する。ピンP2tを固縛する場合には、第1固縛シリンダ316が伸長し第1固縛部313が倒伏状態にシフトし、第2固縛シリンダ317が短縮し第2固縛部314が起立状態にシフトし第2固縛部314がピンP4tを固縛する。固縛装置312は固縛装置12と同様の機能を備える。
【0105】
図39に示す通り、フレーム支柱50に代えて車体長手方向に延びる断面凹状の溝350aを備えるレール受部350を形成し、レールR2t、レールR4tがレール受部350に設けた溝350a内に嵌まる状態で、コンテナC4t,C2tがその上を前後にスライドする。第3実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0106】
≪第4実施形態≫
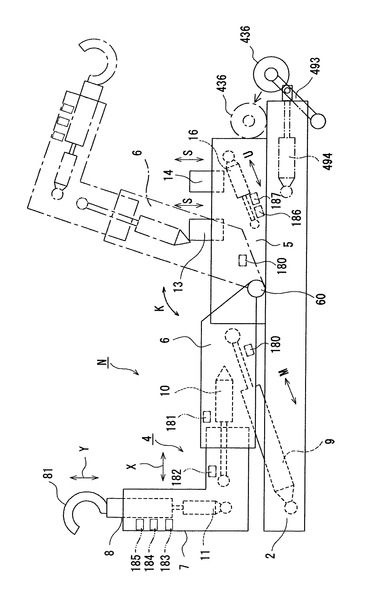
第4実施形態のコンテナ脱着車両1の可動式のローラ436を図41を参照して説明する。ローラ436はサポート493が支持しローラシリンダ494がサポート493を車体長手方向に回動する構成である。油圧装置17にローラシリンダ494用の切換弁(図示略)を追加し、その出口ポートはローラシリンダ494に接続する。ローラシリンダ494は順次作動制御部197、各部シリンダ緩除装置198が制御し伸縮作動する。図41に示すローラシリンダ494を伸長作動させ、ローラ436を二点鎖線位置から実線位置に移動させる。ローラ436の位置が図41の二点鎖線位置のままであると、コンテナC2tがローラ436上を傾斜しながらスライドする際に、コンテナC2tの傾きが大きくなる。これを防止するため、ローラシリンダ494を伸長作動させ、ローラ436を実線位置に移動させる。車体長手方向長さが短いコンテナC2tであっても、大きく傾けることなく脱着作動を行える。ローラシリンダ494にリミットスイッチ(図示略)を設けて伸縮を制御する。なお、第4実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。ローラ436の回動に代えて水平方向へのスライドしてもよい。
【0107】
≪第5実施形態≫
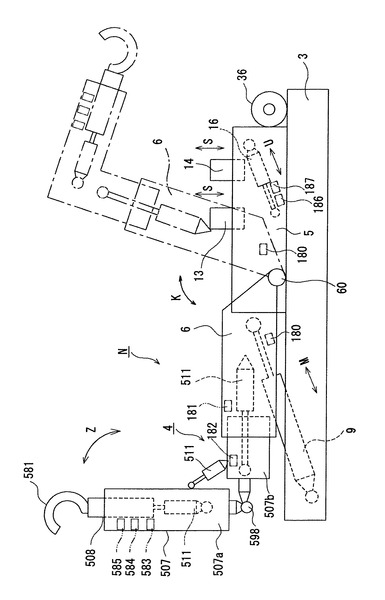
第5実施形態のコンテナ脱着車両1の傾動式のスライドアーム507を図42を参照して説明する。スライドアーム507は、枢動する2つのケーシング507aと507bとを備え、ケーシング507aを傾動シリンダ511で駆動する。傾動シリンダ511の伸縮によってスライドアーム507aが矢印Zに示す通り傾動する。スライドアーム507aを湾曲形状にしてもよい。なお、第5実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0108】
本発明の実施の形態は、上記の実施形態に何ら限定するものではなく、本発明の技術的思想を逸脱しない範囲において、改変等を加えることができ、それらの改変、均等物等も本発明の技術的範囲に含まれ、該技術的範囲に属する限り種々の形態を採り得る。
【0109】
例えば、ダンプフレーム5に対する支持アーム6の回動を許容するようとした状態でメイン駆動部9を作動させると、ダンプフレーム5を回動させることなく支持アーム6が起伏回動し、コンテナがキャリア部に対して脱着する。支持アーム6とダンプフレーム5とをロックするロック機構を備え、このロックが支持アーム6のダンプフレーム5に対する回動を禁止するように構成する。そして、前後移動するスライドアーム7がロック機構を動かすように構成し、ロック状態とロック解除状態とを切り替える。
【図面の簡単な説明】
【0110】
【図1】第1実施形態のコンテナ脱着車両の荷役フレームを模式的に示した右側面図である。
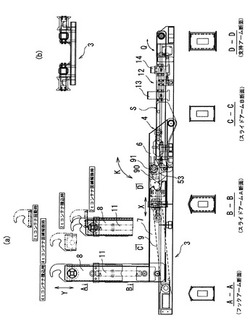
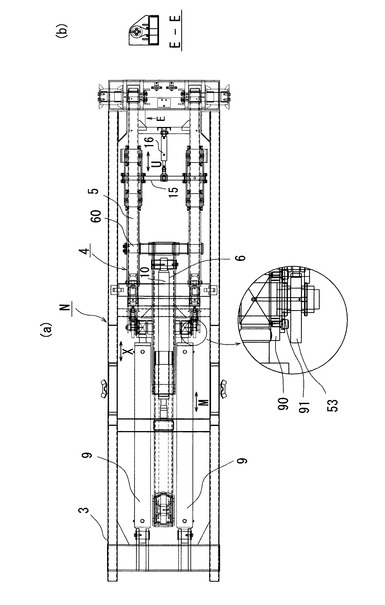
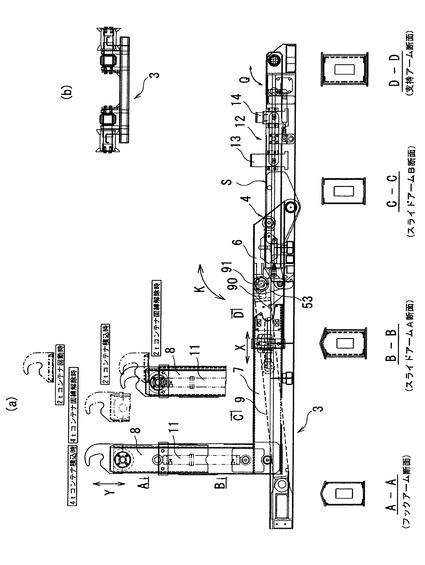
【図2】(a)は荷役フレームの平面図、(b)はE矢視図である。
【図3】(a)は荷役フレームの右側面図、(b)は同背面図である。
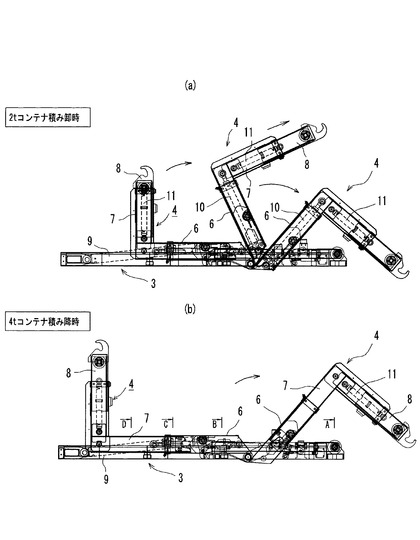
【図4】(a)はコンテナC2t積降時の荷役フレームNの動作図、(b)はコンテナC4t積降時の荷役フレームNの動作図である。
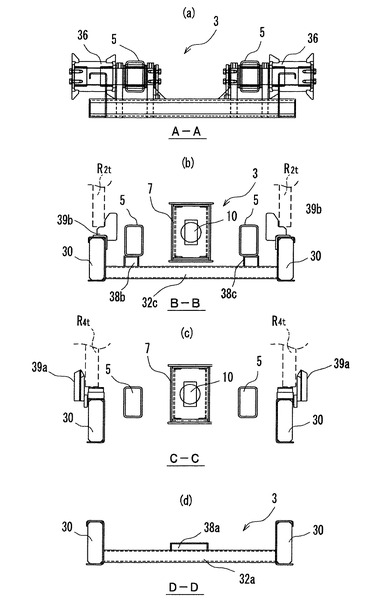
【図5】(a)は図4(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図、(d)はD矢視図である。
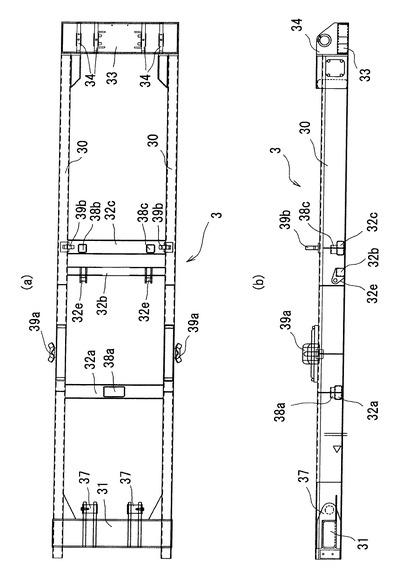
【図6】(a)はメインフレームの平面図、(b)は同側面図である。
【図7】(a)はメインフレームの背面図(ローラを取り外した状態)、(b)は同背面図である。
【図8】(a)はダンプフレームの平面図、(b)は同右側面図、(c)は同裏面図である。
【図9】(a)は図8(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図、(d)はD矢視図、(e)はE矢視図である。
【図10】(a)は支持アームの平面図、(b)は同右側面図である。
【図11】(a)は図10(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図である。
【図12】(a)は(b)のA矢視図、(b)は同右側面図、(c)は同背面端面図、(d)は同正面図である。
【図13】(a)は図12(b)のB矢視図、(b)は同C矢視図である。
【図14】(a)はフックアームの右側面図、(b)は同正面図、(c)は(b)のA矢視図である。
【図15】固縛装置の斜視図である。
【図16】(a)(b)は固縛装置の動作図である。
【図17】(a)は図16(a)のA矢視図、(b)は図16(a)のB矢視図、(c)は図16(b)のC矢視図、(d)は図16(a)のD矢視図である。
【図18】(a)(b)は固縛装置の昇降位置説明図である。
【図19】各シリンダを作動させるための油圧回路図である。
【図20】(a)はメインシリンダの油圧回路図、(b)は固縛シリンダの油圧回路図である。
【図21】(a)はダンプロックシリンダの油圧回路図、(b)はフックシリンダの油圧回路図、(c)はスライドシリンダの油圧回路図である。
【図22】制御装置の電気回路のブロック図である。
【図23】荷役作業の作動制御を示すブロック図である。
【図24】操作部の正面図である。
【図25】本発明の一実施形態に係るコンテナ脱着車両の側面図であり、コンテナの車体部2搭載が終了した時(走行時)の状態を示す図であって、(a)は4tコンテナ搭載時、(b)は2tコンテナ搭載時を示す側面図である。
【図26】コンテナC4tの場合における積降方法を示す側面図であり、(a)は固縛解除ステップ1が終了した時点の状態を示し、(b)は回動ステップ2が終了した時点の状態を示し、(c)は回動ステップ3が終了した時点の状態を示す。
【図27】コンテナC4tの場合における積降方法を示す側面図であり、(a)は着地ステップ4が終了した時点の状態を示し、(b)は着地ステップ5が終了した時点の状態を示す。
【図28】コンテナC4tの場合における脱着アームの動きを示す側面図であり、(a)(b)は積降方法を示す。
【図29】コンテナC2tの場合における積降方法を示す側面図であり、(a)は固縛解除ステップ1’の開始から終了までの状態を示し、(b)は回動ステップ2’が終了した時点の状態を示し、(c)は回動ステップ3’が終了した時点の状態を示す。
【図30】コンテナC2tの場合における積降方法を示す側面図であり、(a)はフックアーム伸長ステップ4’が開始する状態を示し、(b)は回動ステップ5’の作動途中の状態を示す。
【図31】コンテナC2tの場合における積降方法を示す側面図であり、(a)は着地ステップ6’が終了した時点の状態を示し、(b)は着地ステップ7’が終了した時点の状態を示す。
【図32】コンテナC2tの場合における脱着アームの動きを示す側面図であり、(a)は4tから2tへの切換作動、(b)は固縛解除動作を示す。
【図33】コンテナC2tの場合における脱着アームの動きを示す側面図である。
【図34】(a)はコンテナC4tの場合におけるダンプ作動を示す側面図、(b)はコンテナC2tの場合におけるダンプ作動を示す側面図である。
【図35】(a)〜(c)は第2実施形態のコンテナ脱着車両の固縛装置の中立時の説明図である。
【図36】(a)〜(c)は同固縛装置のコンテナC4t固縛時の説明図である。
【図37】(a)〜(c)は同固縛装置のコンテナC2t固縛時の説明図である。
【図38】(a)(b)は第3実施形態のコンテナ脱着車両を示し、(a)は、コンテナ脱着車両の右側面図、(b)は同荷役フレームの平面図である。
【図39】(a)はコンテナC4tを荷役フレームに積込した状態の背面図、(b)はコンテナC2tを荷役フレームに積込した状態の背面図である。
【図40】(a)は図38(b)のA矢視図、図40(b)(f)はB矢視図、図40(c)(g)はC矢視図、図40(d)(h)はD矢視図、図40(e)(i)はE矢視図、又、(a)〜(e)はコンテナC4tを積み込んだ状態の矢視図、(a)及び(f)〜(i)はコンテナC2tを積み込んだ状態の矢視図である。
【図41】第4実施形態のコンテナ脱着車両の荷役フレームの模式図である。
【図42】第5実施形態のコンテナ脱着車両の荷役フレームの模式図である。
【図43】従来のコンテナ脱着車両の説明図である。
【符号の説明】
【0111】
1・・・コンテナ脱着車両 2・・・車体部 3・・・メインフレーム
4・・・キャリア部 5・・・ダンプフレーム 6・・・支持アーム
7・・・スライドアーム 8・・・フックアーム 9・・・メインシリンダ
10・・・スライドシリンダ 11・・・フックシリンダ
12,212・・・固縛装置 13,213,313・・・第1固縛部
14,214,314・・・第2固縛部 15・・・連結部
16,316a,316b・・・固縛シリンダ 17・・・油圧装置
18・・・各種センサ 19・・・電子制御装置 36・・・ローラ
215・・・固縛スライダ
C2t,C4t・・・コンテナ P2t,P4t・・・ピン T・・・掛止部
W・・・車輪 L・・・脚部 R2t,R4t・・・レール
【技術分野】
【0001】
本発明は、車台上にメインフレームを備え、メインフレームに対して回動させるキャリア部を備え、該キャリア部上にコンテナを脱着するようにしたコンテナ脱着車両に関する。
【背景技術】
【0002】
図43は特許文献1〜3のコンテナ脱着車両を説明する図であり、車体部2’上に取り付けられたメインフレーム3’を備え、該メインフレーム3’に設けられたキャリア部4上に積載する所定の積載容積のコンテナCtを脱着するようにした構成である。
図43(a)に示す如くキャリア部4’は、車体F’の車体長手方向(図43の左右方向)に延びる形状のダンプフレーム5’、該ダンプフレーム5’の前方に回動するように接続し車体長手方向に延びる形状の支持アーム6’、及び支持アーム6’の前方に接続し上下方向に延びるスライドアーム7’から構成する。
スライドアーム7’の上方には、コンテナCt’の前方上部に設けた掛止部T’と係合するようなフックアーム8’が備えられ、支持アーム6’には、該支持アーム6’を車体長手方向に起伏回動させるメインシリンダ7’が接続する。
【0003】
ダンプフレーム5’に対する支持アーム6’の回動する状態で、メインシリンダ9’を作動させると、図43(b)に示す如くダンプフレーム5’を回動させることなく支持アーム6’が起伏回動し、コンテナCtがキャリア部4’に対して脱着する。
【0004】
ダンプフレーム5’に対する支持アーム6’の回動を禁止した状態で、メインシリンダ9’を作動させると、図43(c)に示す如くダンプフレーム5’及び支持アーム6’が一体となって起伏回動し、キャリア部4上に積載した状態のコンテナCtがダンプ作動する。
【0005】
ここで、コンテナCtには、容量に応じて外形寸法の異なる種々のものがあり、それぞれに対応してコンテナ脱着車両を製造する。例えば、最大積載量が2トンのコンテナ脱着自動車は、コンテナC2t(積載容積が4m3)を専門に積載し、最大積載量が4トンのコンテナ脱着自動車は、コンテナC4t(積載容量が8m3)を専用で積載しており、それぞれに対応して車両緒元を設定した2t用コンテナ脱着車両と、4t用コンテナ脱着車両とをそれぞれ製造する。当然、4t用コンテナ脱着車両はコンテナC2tを積載不可能な構造である。
【0006】
特許文献3の固縛装置は、スイングフレームの後方部分9の側面には、コンテナ底面のロック手段となるフックに係合する位置とその係合が外れる位置との間で旋回するロックアームが取り付けられ、コンテナ搭載時の走行安定性を高めている。他の構造の固縛装置が特許文献4及び5に記載される。
【0007】
【特許文献1】特開平11−59257号公報
【特許文献2】特開2004−17926公報
【特許文献3】特開平6−305355号公報
【特許文献4】特開平9−267681号公報
【特許文献5】特開2001−334862公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、コンテナ及びコンテナ脱着車両には様々なメーカーがあり、メーカーごとにコンテナ及びコンテナ脱着車両の設計が大幅に異なっている。特許文献1〜3のコンテナ脱着車両では、フックアーム8’の長さは固定でありフックの位置を変更することができない。積載容積の異なる複数種のコンテナ、例えば、コンテナC2t,コンテナC4tの外形寸法は相違し、フックアーム8’と係合する掛止部T’の位置が変わってくるので、コンテナの積載量に応じてそれぞれ別のコンテナ脱着車両が製造する。特許文献3乃至5の通り、コンテナの固縛装置も1種類のコンテナの積載容積に対応して1種類の固縛装置が取り付けられており、複数種類の積載容積のコンテナに対応させて、それぞれに別仕様の固縛装置が取り付けられている。そのため、積載容積の相違するコンテナC4t,C2tを同一のコンテナ脱着車両に積載させることは不可能である。コンテナC4t,C2tの種類に合わせ、且つ、メーカー毎に異なる仕様のコンテナ脱着車両をそれぞれ製造し、使用せざるをえない。したがって、1つのメーカで製造した1種類のコンテナ脱着車両でさえ、相違する積載容積のコンテナを搭載できないこともあり、使用者にとっては、作業効率やコスト面で非常に不便であった。
【0009】
本発明は、上記点に鑑み、積載容積の異なる複数種類のコンテナの制限、或いは、メーカー毎の仕様の相違に制限を受けず、しかも、構造を複雑化させることなく、1種類のコンテナ脱着車両で複数種類の積載容積のコンテナを兼用して積載させ、コストを低減し、コンテナ脱着車両の用途を拡大することを目的とする。
【課題を解決するための手段】
【0010】
上記課題に鑑み、請求項1のコンテナ脱着車両1は、積載容積の相違する複数種類のコンテナC4t,C2tを積載する車体部2と、車体部2の車台に取り付けたメインフレーム3と、メインフレーム3に連結するダンプフレーム5と、ダンプフレーム5に対し車体長手方向に回動自在に結合し、コンテナC4t,C2tを車両後部から脱着するL型のキャリア部4と、キャリア部4を駆動する駆動部と、駆動部を制御する制御部19と、を備え、キャリア部4が、ダンプフレーム5に対して車体長手方向に回動自在に連結する支持アーム6と、支持アーム6の軸方向にスライドするスライドアーム7と、スライドアーム7の縦ケーシングの軸方向に沿ってスライドするとともに、コンテナC4t,C2tの掛止部Tと掛止するフック81を有するフックアーム8と、を備え、駆動部が、キャリア部4を回動するメイン駆動部9と、スライドアーム7をスライドするスライド駆動部10と、フックアーム8をスライドするフック駆動部11と、を備え、制御部19から駆動部に出力する信号を複数種類のコンテナC4t,C2tに対応させて設定し、該信号に応じて駆動部の駆動状態を相違させ、複数種類のコンテナC4t,C2tのいずれも脱着することを特徴とする。
【0011】
コンテナ脱着車両1は、最大積載量が4tのほか、増トン3.5t用のコンテナ脱着車両、増トン5.5tコンテナ脱着車両なども含む。増トンとは、中型クラスをベースとして、軸許容荷重やタイヤ許容荷重に余裕を持たせて、積載量に余裕を持たせたものである。
【0012】
請求項2のコンテナ脱着車両1は、複数種類のコンテナC4t,C2tの底面に形成する係合部P4t,P2tの種類に対応させてキャリア部4にそれぞれ相違する位置に配置する可動式の複数種類の固縛部13,14と、複数種類の固縛部13,14を駆動する固縛駆動部16と、を備える固縛装置12を設け、複数種類のコンテナC4t,C2tを脱着するときに種類に応じて制御部19から固縛駆動部16へ出力する信号を複数種類に設定し、複数の固縛部13,14のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、他方の固縛部を一方の係合部に衝突しないように移動させる。
【0013】
請求項3のコンテナ脱着車両1のキャリア部4は積載容積の相違する少なくとも2種類の第1コンテナC4tと、第2コンテナC2tと、を積載し、固縛装置12は、2種類のコンテナC4t,C2tの底面部にそれぞれ設けられた第1係合部P4t及び第2係合部P2tをそれぞれ固縛する第1固縛部13及び第2固縛部14を備え、第1固縛部13は第2固縛部14に対しダンプフレーム5に対して車体長手方向に相違する位置に配置し、スライドアーム7が車体長手方向にスライドすることにより、キャリア部4に水平に積載した状態のコンテナC4tの第1係合部P4tを第1固縛部13が固縛或いは固縛解除し、第2係合部P2tを第2固縛部14が固縛或いは固縛解除する。
【0014】
請求項4のコンテナ脱着車両1の制御部19は、フックアーム8を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させ、第1位置から第2位置にフックアーム8をスライドすることにより、積載容積の大きなコンテナC4tの固縛が解除し、フックアーム8を第3位置から第4位置にスライドすることにより、積載容積の小さなコンテナC2tの固縛が解除する。
【0015】
請求項4で規定する上記第2位置と第3位置とは異なる位置、或いは同一位置に設定してもよい。第1位置または第3位置では支持アームはダンプフレーム5に対する回動を禁止した状態になるとともに、第2位置または第4位置ではダンプフレーム5に対して回動する状態となるように構成してもよい。
【0016】
請求項5において、フックアーム8が第1位置または第3位置にて停止した状態で、制御部19は、操作部20のダンプ操作により、ダンプフレーム5を支持アーム6に自動的にロックし、支持アーム6のダンプフレーム5に対する回動を禁止する。
【0017】
請求項6のコンテナ脱着車両1の固縛部12は、昇降、回動、又は車体長手方向にスライドする。
【0018】
請求項7のコンテナ脱着車両1の固縛部はダンプフレーム5の軸方向に対し垂直方向への昇降動作を行なう構造を備え、車体長手方向の前方に配置する第1固縛部13と、第1固縛部13に対し車体長手方向の後方に配置する第2固縛部14とを備え、第1固縛部13と、第2固縛部14とを、シーソー機構を備える連結部15が連結し、一方の固縛部と他方の固縛部が逆方向に移動する。
【0019】
請求項8のコンテナ脱着車両1の固縛部は車体幅方向に回動動作を行なう第1固縛部313及び第2固縛部314を備え、一方の固縛部が起立すると、他方の固縛部が倒伏する。
【0020】
請求項9のコンテナ脱着車両1の固縛部は車体長手方向にスライドするスライド部215を備え、スライド部215がスライドすると、第1固縛部213及び第2固縛部214のいずれか一方を固縛し、他方の固縛部を固縛解除する。
【0021】
請求項10のコンテナ脱着車両1の制御部19は、フックアーム8を少なくとも3つの高さ位置に制御する回路を備え、積載容積が大きなコンテナC4tをキャリア部4に脱着するとき、フック駆動部11は伸長位置を維持し、積載容積が小さなコンテナC2tを脱着するときに、キャリア部4の回動位置が所定位置よりも車体後方である場合には、フックアーム8は伸長位置よりもさらに伸長させた最大伸長位置を維持し、回動位置が所定位置よりも車体前方である場合には、短縮位置を維持する。
【0022】
請求項11のコンテナ脱着車両1のスライド駆動部10は、1本の油圧駆動部と、油圧駆動部の原点を検出する原点センサと、油圧駆動部のロッドの位置を検出するエンコーダとを備え、制御部19はロッドの位置を数値制御する制御回路を備え、設定した目標位置にロッドが接近したとき、油圧駆動部の速度を減速する。
【0023】
請求項12のコンテナ脱着車両1の制御部19が操作部20を備え、操作部20は、2種類のコンテナC4t,C2tに対応する2個の脱着/ダンプ兼用スイッチ、2種類のコンテナC4t,C2tに対応する2個のダンプ/脱着切換スイッチを備え、スイッチに対応して制御部19に順次制御が設定する。
【0024】
請求項13のコンテナ脱着車両1のスライドアーム507は、枢動する2つのケーシング507aと507bとを備え、該ケーシング507aと507bとを傾動シリンダ511で駆動する。
【0025】
請求項14のコンテナ脱着車両1は、車体部と、該車体部の車台に取り付けたメインフレーム3と、前記メインフレーム3に連結するダンプフレーム5と、前記ダンプフレーム5に対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部4と、前記キャリア部4を駆動する駆動部と、前記駆動部を制御する制御部19と、を備え、前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて前記キャリア部4又はダンプフレーム5にそれぞれ相違する位置に配置する可動式の複数種類の固縛部13,14と、該複数種類の固縛部を駆動する固縛駆動部16と、を備える固縛装置を設け、前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部19から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部13,14のうちいずれか一方の固縛部が対応する一方の係合部P2t、P4tを固縛するときには、該他方の固縛部を前記一方の係合部P2t,P4tに衝突しないように移動させるものである。
【0026】
請求項15のコンテナ脱着方法は、車台上に取り付けたメインフレーム3にダンプフレーム5を備え、ダンプフレーム5に対してメイン駆動部9が、支持アーム6とスライドアーム7を供えるL型のキャリア部4を、車体長手方向に回動させ、スライド駆動部10がスライドアーム7を支持アーム6に対してスライドさせ、フックアーム8をスライドアーム7に対してスライドさせ、積載容積が大きな第1コンテナC4tと、第1コンテナC4tよりも積載容積が小さな第2コンテナC2tを含む、複数のコンテナC4t,C2tを車両後部から車体長手方向に移動させて脱着させ、コンテナC4t,C2tを積載した状態で走行する場合には固縛装置12がコンテナC4t,C2tを固縛するコンテナ脱着方法において、
(1)第1コンテナC4tを積み降す際、
a.車体長手方向の前方側の第1位置でフックアーム8を停止させ、フックアーム8を伸長位置で停止させ、固縛装置12がコンテナC4tを固縛した状態で走行可能状態に設定する積載ステップと、
b.第1位置から車体長手方向の後方側の第2位置にフックアーム7及びスライドアーム8を車体長手方向にスライドさせ、第1コンテナC4tと固縛装置12との固縛を解除する固縛解除ステップと、
c.キャリア部4をダンプフレーム5に対して車体長手方向の後方に回動させながら、案内部でコンテナ底部レールR4tを案内し、第1コンテナC4tの後部輪を着地させる回動ステップと、を備え、
(2)第2コンテナC2tを積み降す際、
a.(1)a.の第1位置よりも車体長手方向の後方側に設定した第3位置でフックアーム8を停止させ、フックアーム8をスライドアーム7に対して短縮位置で停止させ、固縛装置12が第2コンテナC2tを水平に固縛した状態でコンテナを走行可能状態に設定する積載ステップと、
b.第3位置よりも車体後方側に設定した第4位置にフックアーム8をスライドさせ、第2コンテナC2tと固縛装置12との固縛を解除する固縛解除ステップと、
c.キャリア部4をダンプフレーム5に対して後方に回動させ、案内部がコンテナ底部レールR2tを案内する第1案内ステップと、
d.コンテナ後部車輪Wが着地したときにキャリア部4を所定角度で停止させる停止ステップと、
e.停止中にフックアーム8をスライドアーム7から伸長させる伸長ステップと、
f.キャリア部4をダンプフレーム5に対して後方に回動させ、案内部の上空をコンテナ底部レールR2tが通過し、第2コンテナC2tの後部輪を着地させる第2案内ステップと、
を備えることを特徴とする。
【0027】
請求項16のコンテナ脱着方法は、車台上に取り付けたメインフレーム3にダンプフレーム5を備え、ダンプフレーム5に対してメイン駆動部9がキャリア部4を車体長手方向に回動させ、スライド駆動部10がスライドアーム7をスライドさせ、フック駆動部11がフックアーム8をスライドさせ、
積載容積が大きな第1コンテナC4tと、第1コンテナC4tよりも積載容積が小さな第2コンテナC2tを含む、複数のコンテナC4t,C2tを車両後部から車体長手方向に移動させて脱着させ、
コンテナC4t,C2tを積載した状態で走行する場合には固縛装置12がコンテナC4t,C2tを固縛するコンテナ脱着方法において、
(1)第1コンテナC4tを積み込む際、
a.伸長位置で停止させたフックアーム8を、水平に着地した第1コンテナC4tに掛止する掛止ステップと、
b.キャリア部4をダンプフレーム5に対して前方に回動させながら、第1コンテナC4tの前脚を地面から離脱させ、案内部でコンテナ底部レールR4tを案内しフックアーム8を第2位置に移動する回動ステップと、
c.第2位置から車体前方側の第1位置にフックアーム7及びスライドアーム8をスライドさせ、第1コンテナC4tを固縛装置12で固縛する固縛ステップと、
d.車体の前方側の第1位置でフックアーム8及びスライドアーム7を停止させ、コンテナを走行可能状態に設定する積載ステップと、を備え、
(2)第2コンテナC2tを積み込む際、
a.伸長位置で停止させたフックアーム8を、水平に着地した第2コンテナC2tに掛止する掛止ステップと、
b.キャリア部4をダンプフレーム5に対して車体長手方向の前方に回動させ、第2コンテナC2tの前脚を地面から離脱させ、コンテナ底部レールR2tが案内部36の上空を通過する第1案内ステップと、
c.コンテナ後部車輪Wが離陸するときにキャリア部4を停止させる停止ステップと、
d.停止中にフックアーム8をスライドアーム7に対して短縮させる短縮ステップと、
e.キャリア部4をメインフレーム3に対して前方に回動させながら、案内部36がフックアーム8が第4位置に至るまでコンテナ底部レールR2tを案内する第2案内ステップと、
f.第4位置よりも車体長手方向の前方であって且つ(1)c.の第1位置よりも車体長手方向の後方側に設定した第3位置にフックアーム8をスライドさせ、第2コンテナC2tを固縛装置12で固縛する固縛ステップと、
g.第3位置でフックアーム8及びスライドアーム7を停止させ、コンテナC2tを走行可能状態に設定する積載ステップと、
を備えることを特徴とする。
【発明の効果】
【0028】
請求項1〜16の発明によれば、フックアームをキャリア部に対して伸縮することにより、コンテナの掛止部の位置に合わせて、フックアームの位置を調節できるので、積載容積の異なる複数種のコンテナを1種類のコンテナ脱着車両に入れ替えて積載させることを容易に実現できる。従来、複数種類のコンテナ脱着車両を要していたところ、1種類のコンテナ脱着車両で対応できるので、コンテナ脱着車両の保険料、車検費用、人件費、駐車スペースを削減できる。1台のコンテナ脱着車両で兼用できるので、新たな用途が拡大する。
【0029】
フックアームをキャリア部に対して伸縮することで、フックアームに加わる衝撃を緩和できる等、コンテナの脱着の際に行うキャリア部の回動動作を円滑にできる。
【0030】
請求項2の発明によれば、コンテナの脱着に際し、固縛装置と、コンテナ或いはキャリア部との衝突を回避できる。
【0031】
請求項3の発明によれば、複数の積載容積のコンテナに対応させて、複数種類のコンテナの固定を確実にし、コンテナ脱着車両の走行中の安全性を高めることができる。
【0032】
請求項4の発明によれば、スライド駆動部を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させるよう構成するので、いずれのコンテナを適用させる場合であっても、スライドアームの動きを同一の動きにできるので、固縛或いは固縛解除の構成が簡素になる。車体の横揺れに対して強くなる。
【0033】
請求項5の発明によれば、自動的にフック装置が動作してダンプフレームに対するキャリア部のロック操作が容易になるとともに、安全性が高くなる。スライド駆動部と、ダンプロック駆動部の両機能を発揮できるので、構成を簡素にできるとともにコストダウンを図ることができる。
【0034】
請求項6の発明によれば、固縛部は、昇降、回動、又は車体軸方向にスライドするので、固縛部とコンテナとの衝突を防止できる。
【0035】
請求項7の発明によれば、第1固縛部と、第2固縛部とを、シーソーを備える連結部が連結し、一方の固縛部と他方の固縛部が逆方向に移動するので、固縛駆動部の本数の低減でき、制御部の構成も簡素にできる。
【0036】
請求項8及び9の発明によれば、固縛駆動部の本数を低減でき、精密な退避動作が可能となる。
【0037】
請求項10の発明によれば、フックアームの位置をキャリア部に対して変更できるので、コンテナの脱着の際に、コンテナ荷重に起因する衝撃からフックアームを保護できる。
【0038】
請求項11の発明によれば、スライド駆動部を1本に限定し油圧回路を簡単な構造にし、ロッドの停止位置の精度を上げ、精密なスライドアームの位置制御が可能となる。
【0039】
請求項12の発明によれば、操作スイッチの数を低減し、脱着動作、ダンプ動作及び固縛動作の複雑な動きをワンタッチの切換によって簡単に操作することができるので、操作者の負担を軽減できる。
【0040】
請求項13の発明によれば、スライドアームの自由度を高め、作業範囲を拡大できる。
【0041】
請求項14の発明によれば、複数の積載容積のコンテナに対応させて、複数種類のコンテナの固定を確実にし、コンテナの脱着に際し、固縛装置と、コンテナ或いはキャリア部との衝突を回避でき、コンテナ脱着車両の走行中の安全性を高めることができる。
【発明を実施するための最良の形態】
【0042】
≪第1実施形態≫
以下に、本発明の好適な一実施形態であるコンテナ脱着車両1について図面を参照して説明する。コンテナ脱着車両1は最大積載量が4tである。コンテナ脱着車両1は積載容積が8m3のコンテナ(以下、コンテナC4tという)と積載容積が4m3のコンテナ(以下、コンテナC2tという)とを入れ替えて積載できるようにした構造を備える。コンテナ脱着車両1の主要諸元や制動力は、コンテナC4tを積載して走行するように設計し、車体構造をコンテナC2tも積載できるように設計してある。コンテナC4t積載時とコンテナC2t積載時とでは積載状態が相違する(図25参照)。
【0043】
コンテナ脱着車両1は、図1に示す荷役フレームNを備える。荷役フレームNは、車体部2上に取り付けたメインフレーム3と、メインフレーム3に連結するとともに車体長手方向に回動し(図1の矢印K)、コンテナC2t及びC4tを脱着するキャリア部4と、を備える。メインフレーム3に車体長手方向に延びる形状のダンプフレーム5が連結する。キャリア部4は、ダンプフレーム5に対して回動するように接続して車体長手方向に延び出す支持アーム6と、支持アーム6に接続し車体長手方向に延び出すとともに支持アーム6の軸方向に沿ってスライドするスライドアーム7と、から構成する(図1参照)。スライドアーム7の上方に、スライドアーム7の軸方向に沿ってスライドする、コンテナC2t及びC4tの前方部と係合するためのフックアーム8が備えられている。荷役フレームNはさらに、支持アーム6を車体長手方向に起伏回動させるメインシリンダ9と、支持アーム6の軸方向に沿ってスライドアーム7をスライドさせるスライドシリンダ10と、スライドアーム7に対するフックアーム8のスライド量を制御するフックシリンダ11と、を備える。支持アーム6、スライドアーム7及びフックアーム8をメインシリンダ9、スライドシリンダ10,フックシリンダ11を使用して駆動することによりコンテナC2t及びC4tを脱着する構造である。
【0044】
コンテナ脱着車両1にコンテナC2t又はC4tを積載し走行する際、車体の走行安定性を確保するため、図15〜図18に示す通り、ダンプフレーム5に固縛装置12を設けている。固縛装置12は、矢印Sの方向に昇降する可動式の第1固縛部13及び第2固縛部14と、それらを連結する連結部15と、連結部15を駆動する固縛シリンダ16(矢印U方向に伸縮)と、を備える。第1固縛部13はコンテナC2tの後方の底面に車体長手方向に突出するように形成した2tコンテナ用ピン(以下、ピンP2tという)を固縛する。同様に、第2固縛部14は4tコンテナ用ピン(以下、ピンP4tという)を固縛する。
【0045】
図19に示す各種シリンダメインシリンダ9,スライドシリンダ10,フックシリンダ11,固縛シリンダ16,ダンプ・ロックシリンダ54を作動制御する油圧装置17、各種センサ18、及び、図22及び図23に示す通りセンサ信号を入力し油圧回路を制御する制御装置19、図24に示す各種スイッチを備える操作部20と、を設けている。その他、アウトリガー22を備える。以下、コンテナ脱着車両1の詳細構造を説明する。
【0046】
メインフレーム3について図6及び図7を参照して説明する。メインフレーム3は、平面視にて枠状に形成し、左右一対の側フレーム30と、側フレーム30の前部を接続する前板31と、側フレーム30の中部を接続する中板32a,32b,32cと、側フレーム30の後部を接続する後板33を備える。後板33は左右一対の横軸支持部34を車体幅方向に間隔をおいて備えている。一対の横軸支持部34にはそれぞれ横軸35を横方向に水平に装着する。横軸35に後述するダンプ中心軸孔57を軸装し、横軸35の外側端部にローラ36を回転自在に軸架する。ローラ36はコンテナC2t又はC4tの底面に車体長手方向に延び出すように固定したレールR2t又はレールR4tを案内する。ローラ36の軸方向の断面は鼓型であり両端部にレール規制部36a及び36bを備える。前板31にメインシリンダ取付部37を形成する。中板32aに支持アーム受部38aを固定し、中板32cにダンプフレーム受部38b及びダンプフレーム受部38cを固定する。中板32bにダンプアーム反転防止ブラケット32eを取り付ける。
【0047】
図7(b)に示す通り、コンテナC2tとコンテナC4tのそれぞれの底壁面には、車体長手方向に延びる形状のレールR2t、レールR4tが左右に一対ずつ溶接等により取り付けられる。コンテナC4tとコンテナC2tとの外形寸法の違いに起因して、コンテナC2tにおける2本のレールR2tのスパン(レールゲージ)は、コンテナC4tのレールR4tのレールゲージよりも小さくなる。そして、本発明の実施にあたり、2t用レールR2tのレールゲージに合わせた側フレーム30と4t用レールR4tのレールゲージに合わせた側フレーム30とを別々に備えてもよいが、部品点数増及び構造の複雑化を招く。
【0048】
図6及び図7に示す通り、コンテナC2t,C4tのレールR2t、レールR4tに適した大きさの共通の側フレーム30を形成する。レールR4tの側フレーム30による左右方向の位置規制は、図5(c)に示す通りレールR4tの外側面とレール規制部39aの内側面との当接により規制する。レールR2tの側フレーム30による左右方向の位置規制は、図5(b)に示す通りレールR2tの外側面とレール規制部39bの外側面との当接により規制する。さらに、図7(b)に示す通り、レールR4tの位置は、レールR4tの外側面とレール規制部36aの内側面との当接によっても規制し、レールR2tの位置は、レールR2tの内側面とレール規制部36bの内側面との当接によっても規制する。
【0049】
レール規制部36a,36b,39a,39bでレールR2t、レールR4tの左右方向の動きを規制することにより、キャリア部4上のコンテナC4t,C2tの左右方向の位置ズレを防止する。レールR2tとレールR4tの案内経路を共用化するので、部品点数減及び構造の簡素化を図ることができる。
【0050】
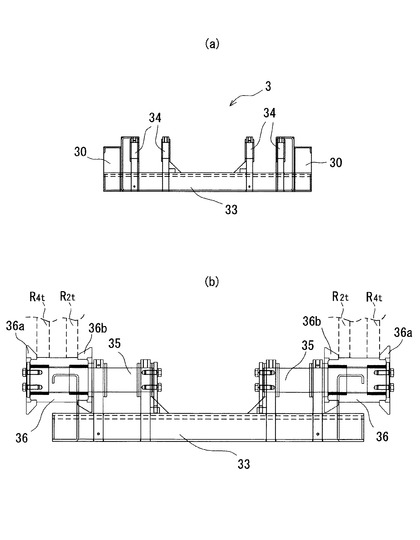
ダンプフレーム5について図8及び図9を参照して説明する。ダンプフレーム5はコンテナC2t又はC4tをダンプさせるのに使用されるものであり、メインフレーム3の後部領域に設け、左右一対の管状のフレーム支柱50と、フレーム支柱50を接続する車体横方向に延びるサポート51a及び51bと、フレーム支柱50の先端に形成するダンプ・アームヘッド52と、車体長手方向に回動するようにダンプ・アームヘッド52に軸着するフックプレート53と、フックプレート53を駆動するダンプ・ロックシリンダ54と、回動軸60を軸装する軸取付部55と、連結部15を軸着する固縛シリンダ取付孔56と、横軸35に軸着するダンプ中心軸孔57と、を備える。軸取付部55は、回動軸60を貫通させ保持するボス55aと、センサ取付部55bと、を備える。このダンプフレーム5は、横軸35の軸線の回りに車体長手方向に回動する。フックプレート53は、フック91にロックすると、ダンプフレーム5が支持アーム6とを一直線状に維持し、ダンプロックフレーム5のメインフレーム3へのロックを解除し、後に詳述するダンプ作動を行う。フックプレート53とフック91のロックを解除すると、ダンプロックフレーム5をメインフレーム3へロックし、コンテナCの脱着動作(積降動作、積込動作)を行う。
【0051】
支持アーム6について図10及び図11を参照して説明する。支持アーム6は、両端部がフレーム支柱50に固定する回動軸60と、回動軸60を保持するボス61と、ボス61を端部に有する中空フレームのフレーム62と、スライドシリンダ10の基端部を軸着するシリンダ用取付部63と、左右一対のメインシリンダ9の先端部を組み付ける左右一対のシリンダ用ブラケット64と、スライドアーム7と接続する接続部65と、を備える。ダンプフレーム5の前端部寄りの中間部の左右には、支持アーム6の後端即ち基端を、回動軸60が、車体長手方向に起伏回動自在に軸支する。この支持アーム6は、ダンプフレーム5よりも幅狭の、前後に細長い方形状に形成し、その後部はダンプフレーム5の内側に納まるように車体長手方向に重なり合うが、その大部分はダンプフレーム5よりも前方に延長しており、その伏倒時には、支持アーム6の上面はダンプフレーム5よりも高い位置にある。
【0052】
スライドアーム7について図12及び図13を参照して説明する。スライドアーム7は、側面視でL字形状に構成し、垂直方向に配置する横ケーシング70と、横ケーシング70と直交して接続するとともにフックシリンダ11を収容する縦ケーシング71と、横ケーシング70と縦ケーシング71とを連結する連結部72と、フックシリンダ11を取り付けるシリンダ取付部73と、から構成する。支持アーム6の前端部には、スライドアーム7が車体長手方向(図1中の矢印Xに示す方向)にスライド自在に連結する。スライドアーム7は、側面から見てL字状に形成する。
【0053】
フックアーム8について図14を参照して説明する。フックアーム8は、スライドアーム・ケーシング71に収容するケーシング80と、ケーシング80の上端に固定したフック81と、フックシリンダ11の上端部を取り付けるボス82、ピン83及びニップル84と、を備えたものである。又、スライドアーム7の上端には、フックアーム8が上下方向(図1中の矢印Yに示す方向)にスライド自在に連結する。このフックアーム8は、コンテナC4t,C2tの前面上部に設けた掛止部Tに係脱自在である。
【0054】
コンテナ脱着車両1の車体部2上に搭載するコンテナC4t,C2tは上面開放の箱状に形成し、後面はリアゲートGが開閉し、その前壁上部には、フック81と係脱する掛止部Tが設けられ、底部の後端部にはキャスタよりなる複数の車輪Wが軸支する。コンテナC4t,C2tは上面が開放していないタイプでもよく、又、コンテナC4t,C2t内の内容物をプレスするプレス機構を備えたものでもよい。
【0055】
コンテナC4t,C2tに設けられてフック81と係脱する掛止部Tの位置は、コンテナC2tとコンテナC4tとで異なる位置となる。スライドシリンダ10の作動によりスライドアーム7を車体長手方向にスライド移動させることで、フックアーム8の位置を車体長手方向(図1中の矢印Xに示す方向)に可変とする。フックシリンダ11の作動によりフックアーム8の位置を上下方向(図1中の矢印Y方向)に可変とする。コンテナC4t,C2tの相違する掛止部Tの位置に合わせて、フックアーム8の位置を前後上下に移動調節するので、掛止部Tの位置が異なる複数種類のコンテナC4t,C2tを1種類のコンテナ脱着車両1に入れ替え積載する。
【0056】
メインシリンダ9について図1、図2を参照して説明する。メインシリンダ9は、左右一対が車体長手方向に延び出す油圧シリンダである。メインシリンダ9の先端は、支持アーム6の外側にある一対のブラケット64に軸着する。このメインシリンダ9の伸縮作動により(図1の矢印M)、キャリア部4をコンテナ脱着車両1の車体長手方向に起伏回動させる。
【0057】
スライドシリンダ10について図1、図2を参照して説明する。支持アーム6の前部の内部にスライドアーム7の後部が装入し、油圧シリンダよりなるスライドシリンダ10がスライドアーム7を駆動するよう連結する。スライドシリンダ10の伸縮作動により、スライドアーム7が支持アーム6に対して車体長手方向(図1中の矢印X方向)にスライドする。
【0058】
フックシリンダ11について図1、図2を参照して説明する。スライドアーム7の直立部の内部には、フックアーム8の高さを調整する油圧シリンダよりなるフックシリンダ11が配置する。フックシリンダ11の伸縮作動により、フックアーム8をスライドアーム7に対して上下方向(図1中の矢印Y方向)にスライド移動させる。
【0059】
固縛装置12について図15〜図18を参照して説明する。固縛装置12は、コンテナC4tを固縛する左右一対の第1固縛部13と、コンテナC2tを固縛する左右一対の第2固縛部14と、第1固縛部13と第2固縛部14とを連結する連結部15と、連結部15を駆動し第1固縛部13と第2固縛部14とをシーソーのように昇降駆動する固縛シリンダ16と、を備え、固縛及び固縛解除を行ない、脱着動作時にコンテナC2t及びC4tと、第1固縛部13又は第2固縛部14との衝突を防止する。ピンP4tとピンP2tは、図16及び図17に示す通り、車体長手方向の位置、高さ、左右間隔のいずれも相違するからである。
【0060】
連結部15及び固縛シリンダ16の作動により、図16(a)、図17(a)及び図18(a)に示す通り、コンテナC4tを積載し固縛する場合には、第1固縛部13が上昇位置にあるときは、第2固縛部14が下降位置にあり、第1固縛部13がコンテナC2tの底壁に形成するピンP4tを固縛し、ピンP4tが第2固縛部14と衝突することを回避する。図16(b)、図17(b)及び図18(b)に示す通り、コンテナC2tを積載し固縛する場合には、第1固縛部13が下降位置にあるときは(矢印S1)、第2固縛部14が上昇位置にあり、第2固縛部14がコンテナC2tの底壁に形成するピンP2tを固縛し(矢印S2)、ピンP2tが第1固縛部13と衝突することを回避する。
【0061】
図16に示す通り、第1固縛部13がピンP4tを車体長手方向の前方位置で固縛し、ピンP2tは車体長手方向の後方位置で固縛する。図17及び図18に示す通り、第1固縛部13がピンP4tをフレーム支柱50の位置を基準として車体幅方向の内側位置で固縛し、ピンP2tはフレーム支柱50の位置を基準として車体幅方向の外側位置で固縛する。第1固縛部13と、第2固縛部14は、フレーム支柱50の車体長手方向に間隔をおいて配設し、第1固縛部13が第2固縛部14よりも前方にある。
【0062】
連結部15は、右側部分が車体長手方向に延び右側の第1固縛部13及び第2固縛部14を貫通する前後一対の横軸150と、第1固縛部13及び第2固縛部14の外面略中央部に設けた前後2対の突出部151と、突出部151を遊嵌する楕円孔152を両端部に備え車体幅方向に延びた前後一対のレバー153と、レバー153の中間部を連結するU型の連結板154と、第1固縛部13と第2固縛部14にそれぞれ形成する前後一対の昇降案内部155と、備える。横軸150はレバー153の中央部と、連結板154の上端部とに連結する。左側部分も右側部分と左右対称に形成し同様の構造とする。左右の連結板154を連結する連結棒156を車体幅方向に備える。連結棒156の中央部に固縛シリンダ16と連結する固定部157を備える。
【0063】
第1固縛部13又は第2固縛部14を固縛状態とすると、コンテナC4t,C2tは上下方向、左右方向、後方向への移動が規制する。コンテナ脱着車両1がコンテナC4t,C2tを積み込んで走行する最中に急ブレーキをかけた場合等であっても、走行コンテナC4t,C2tがキャリア部4に対する前方へのズレ、上下のズレ、左右のズレを規制する。
【0064】
油圧装置17について図19〜図21を参照して説明する。油圧装置17は、コンテナ脱着車両1の走行用エンジンによりPTOを介して駆動する油圧ポンプ171と、ラインフィルタ171aと、油溜172と、作動油路170と、制御弁ユニット173と、を備える。制御弁ユニット173内には、いずれも3位置電磁切換弁よりなる、第1〜第5切換弁174、175、176、177及び178、弁178a、弁178b、が設けられ、第1切換弁174の入口ポートは作動油路170に接続し、又その出口ポートは、電磁式バルブ179aを介してフックシリンダ11に接続する。フックシリンダ11は、図21(b)に示す通り、第1ロッド110を有する第1シリンダ111と、第2ロッド112を有する第2シリンダ113とが隔壁を介して直列に接続し、第1ロッド110と第2ロッド112とが同一軸線上の外側に配置される。第1電磁チェック179aは、第1シャットオフ・バルブ114と、第2シャットオフ・バルブ115とを備える。コンテナC4tを脱着するとき、第1シャットオフ・バルブ114と、第2シャットオフ・バルブ115とは閉じる。第1ロッド110のみが伸長し、第2ロット112が短縮する。コンテナC2tを脱着するとき、フックアーム8の伸長前(図30(a)参照)は、第1シャットオフ・バルブ114と第2シャットオフ・バルブ115とが閉じ、第1ロッド110、第2ロット112ともに短縮し、フックアーム8の伸長後(図30(a)参照)は、第1シャットオフ・バルブ114と第2シャットオフ・バルブ115とが開き、第1ロッド110と第2ロット112はともに伸長する。ダブルロッド構造とシャットオフバルブにより、コンテナC4tの位置を確実に停止でき、停止位置が一層安定化する効果がある。る。
【0065】
フックシリンダ11は、コンテナC2tを脱着するときに短縮し、且つ、コンテナC2tを回動させる途中で最大に伸長する。コンテナC4tをキャリア部4に積載させるときに短縮から伸長に変化する。
【0066】
第2〜第5切換弁175〜178の入口ポートは作動油路170に並列に接続し、第2切換弁175の出口ポートは電磁式チェックバルブ179b(図21(c)参照)を介してスライドシリンダ10に接続し、第3切換弁176の出口ポートは電磁式チェックバルブ179c(図20(a)参照)を介してメインシリンダ9に接続し、パイロット・オペレート・チェック弁179dは固縛シリンダ16(図20(b)参照)に接続し、第5切換弁178の出口ポートはダンプ・ロックシリンダ54(図21(a)参照)に接続する。
【0067】
フックシリンダ11の伸縮制御は第1切換弁174の切換制御が行い、スライドシリンダ10の伸縮制御は第2切換弁175の切換制御が行い、メインシリンダ9の伸縮制御は第3切換弁176の切換制御が行い、固縛シリンダ16の伸縮制御は第4切換弁177の切換制御が行い、ダンプ・ロックシリンダ54の伸縮制御は第5切換弁178の切換制御が行なう。
【0068】
図23に示す通り、コンテナ脱着車両1による荷役作業の作動制御のブロック図が示し、荷役操作スイッチ20a〜20dと、スイッチの選択的ON作動信号により第1〜第5切換弁174〜178の作動を制御する制御装置197,198とを備える。制御装置197,198が制御する第1〜第5切換弁174〜178の作動により、駆動装置としての各種シリンダが伸縮作動する。
【0069】
各種センサ18は、メインシリンダ9の停止位置を検出するリミットスイッチ180、スライドアーム7の原点を検出する原点センサ181、スライドアーム7のロッドの位置を検出するエンコーダ182、フックシリンダ11の複数の位置を検出するリミットスイッチ183〜185、固縛シリンダ16の昇降位置を検出するリミットスイッチ186〜187を備える。
【0070】
制御装置19について図22を参照して説明する。制御装置19は、CPU190、RAM191、ROM192、入出力インタフェース193がバス194により相互に接続し、コンテナ脱着車両1の油圧制御、モータ制御等を司る。各種センサ18の各種検出信号が入出力インタフェース193を介して入力する。操作部20の各種スイッチ20a〜20dの押し下げに応答して各種の信号が入出力インタフェース193を介して入力する。制御装置19からの制御信号を入出力インタフェース193を介して、第1切換弁174〜第5切換弁178、電磁式チェックバルブ179a〜179cに出力する。制御装置19は音声部195と、表示装置196に接続される。音声部195により、「2tモード」、「4tモード」、「脱着」、「ダンプ」等のメッセージにより操作者に切換を喚起する。
【0071】
順次作動制御装置197は、スライドアーム7のロッドの位置検出方式につきエンコーダ182(例えばワイヤ式エンコーダ)を用い、その位置を数値制御する回路を備え、リミットスイッチ(図示略)は確認用とする。スライドアーム7のスロー動作を追加し、目標位置に接近したとき、速度を落とし、精度を上げて停止させる。エンコーダ制御に代えて、エンコーダ制御と同様の効果がある機械的ストッパ(図示略)でもよい。コンテナC2tの待機位置に機械的ストッパを設ける。ロードはスプリングにてリターンする。動作は、スライドアーム7がコンテナC2tの位置に下がると爪がロードを押しストッパが下がり、位置固定金具に差し込まれ固定する。
【0072】
操作部20には、ダンプ−脱着切換スイッチ20a、2t−4t切換スイッチ20b、積降し/ダンプ上げ切換スイッチ20c、積込み/ダンプ下げ切換スイッチ20d、LED20e〜20h等がある。スイッチ20aに対応し、切換え時に自動的にフックプレート53とフック91とのロック、ロック解除を切り替えるように設定し、ダンプ信号、信号を出力する。スイッチ20bに対応し、2t−4tの動作を切り替えるように設定してある。操作部20から制御装置19に切換え信号を送信し、制御装置19は、油圧装置17に、2t脱着信号、4t脱着信号、2tダンプ信号、4tダンプ信号を出力する。
【0073】
制御装置19は、順次作動制御装置197と、各部シリンダ緩除制御装置198とがあり、プログラマブル・コントローラ等により構成する。順次作動制御装置197は、前述したコンテナC4tにおける一連の積降方法、又は、コンテナC2tにおける一連の積降方法となるように、各種シリンダ(メインシリンダ9、スライドシリンダ10、フックシリンダ11、固縛シリンダ16、ダンプ・ロックシリンダ54)が順次作動するように制御する。各部シリンダ緩除制御装置198は、主にメインシリンダ9への作動油の流入量を減少させ、コンテナC4t,C2tの積み降ろしの際における、コンテナC4t,C2tの接地衝撃等を緩和させるよう制御する。
【0074】
アウトリガー22は、コンテナC4t,C2tを積降あるいはダンプさせるとき、伸縮作動し、地面Jからの反力を受けることでコンテナ脱着車両1の姿勢を安定させる。
【0075】
〔本実施形態の動作〕
次に本実施形態のコンテナ脱着車両1の動作を説明する。図25(a)は、コンテナC4tのピンP4tを第1固縛部13が固縛し走行可能な状態(以下、積載状態という)を示し、図25(b)は、同様にコンテナC2tの積載状態を示す。なお、コンテナ脱着車両1の各部の形状は若干異なる。
【0076】
<積載状態(4t)について>
図25(a)に示すコンテナC4tの積載状態では、スライドシリンダ10が伸長することによりスライドアーム7が最前方位置(図28の第1位置)にあり、第1固縛部13がピンP4tを固縛し、フックアーム8の位置がコンテナC4tの掛止部Tの高さと合うように高さを調整され、フックアーム8は掛止部Tと係合する。
【0077】
<積載状態(2t)について>
図25(b)の実線及び図38の二点鎖線に示すコンテナC2tの積載状態では、スライドシリンダ10の収縮によりスライドアーム7が中間位置(第3位置)にある。第2固縛部14がピンP2tと係合するとともに、フックプレート53がフック91と係合し、フックアーム8の位置がコンテナC2tの掛止部Tの高さと合うように位置調整し、フックアーム8は掛止部Tと係合する。フックアーム8の位置調整は、フックシリンダ11を収縮させてフックアーム8を最下方位置にすることによって行う。
【0078】
積載状態からダンプするときはフックプレート53とフック91とがロックする。積載状態から脱着するときは、フックプレート53とフック91とがロック解除する。
【0079】
2tと4tではフックアーム8の位置が相違するため、フックアーム8の位置を調整する必要がある。前記2つの積載状態に対応させるため、リミットスイッチ183、184をそれぞれ設けてある。リミットスイッチ183はコンテナC2tに、リミットスイッチ184はコンテナC4tにそれぞれ対応する(図1参照)。リミットスイッチ185を設ける理由は、2tコンテナの脱着時に、フックシリンダ11が短縮しフックアーム8が下方に退避したままの状態であると、コンテナの脚部が車体と衝突するなどのおそれがあり、脱着動作の途中の位置でフックシリンダ11の長さを調整する必要があるためである。
【0080】
上述した本実施形態の構造によれば、スライドシリンダ10の作動によりスライドアーム7を支持アーム6に対して車体長手方向にスライドすることで、フックアーム8の位置を車体長手方向(図1中の矢印Xに示す方向)に移動調節する。フックシリンダ11の作動によりフックアーム8の位置をスライドアーム7に対して上下方向にスライド移動させることで、フックアーム8の位置を上下方向(図1中の矢印Yに示す方向)に移動調節できる。フックアーム8と係合する掛止部Tの位置が異なる複数種類のコンテナC4t,C2tを、1種類のコンテナ脱着車両1に入れ替えて積載する。
【0081】
図26〜図33を参照して、コンテナ脱着車両1と地面Jとの間でコンテナC4t,C2tに関する脱着方法を説明する。脱着方法にはコンテナC4t,C2tの積降方法と積込方法とがあるが、積降方法を説明する。積込方法は積降方法とは逆のステップとなるので説明は援用する。なお、コンテナC4tの積み降ろしが完了するまでは、フックアーム8と掛止部Tとが掛止したままの状態である。
【0082】
<積降方法(4t)について>
コンテナC4tの積降方法を図26乃至図28(a)(b)を用いて説明すると、先ず、図26(a)の二点鎖線に示す積載状態において、スライドシリンダ10を短縮作動させることにより、スライドアーム7とフックアーム8とを図26(a)の実線位置まで後方移動させる。図28(a)で第1位置から第2位置にスライドさせることに対応する(以下、固縛解除ステップ1という)。図28(a)中の二点鎖線は第1位置にあるスライドアーム7及びフックアーム8を示し、図28(a)中の実線は第2位置にあるスライドアーム7及びフックアーム8を示す。固縛解除ステップ1の間、コンテナC4tのレールR4tは側フレーム30上を車体後方に水平方向にスライドする。固縛解除ステップ1により、第1固縛部13に対しピンP2tが車体後方に移動し、固縛を解除する。
【0083】
コンテナC4t,C2tがキャリア部4上に引上げられてスライドシリンダ10により前進位置(例えばコンテナC4tの場合には、図26(a)に二点鎖線で示す位置)に位置付けられたときにピンP4t,P2tが第1固縛部13、第2固縛部14に係合する。一方、コンテナC4t,C2tがキャリア部4上においてスライドシリンダ10により後退位置(例えば4t用コンテナの場合には、図26(a)に実線で示す位置)に位置付けられたときにピンP4t,P2tが第1固縛部13、第2固縛部14から離脱するように構成する。
【0084】
次に、図26(b)に示す通りメインシリンダ9を伸長作動させることにより、ダンプフレーム5を回動させることなくキャリア部4が車体後方に起立回動する(図28(b)参照)。コンテナC4tのレールR4tはローラ36上をスライドして後方に移動する(以下、回動ステップ2という)。さらにメインシリンダ9を伸長作動させることにより、図26(c)に示す通り、コンテナC4tが車体部2から浮き上がるとともに、コンテナC4tの車輪Wが地面Jに着地する(以下、回動ステップ3という)。
【0085】
さらにメインシリンダ9を伸長作動させることにより、図27(a)及び図28(b)に示す通り、コンテナC4tはフックアーム8が支持しながら、後方に走行移動する(以下、着地ステップ4という)。このとき、ブラケット64が第1固縛部13に衝突しないように、第1固縛部13を下降させ、第2固縛部14を上昇させて安全性を高める。このとき支持アーム6の水平からの角度は120〜140°が好ましい。メインシリンダ9を伸長作動させることにより、図27(b)及び図28(b)に示す通り、コンテナC4tの車輪W及び脚部Lが地面Jに着地する(以下、着地ステップ5という)。コンテナC4tのコンテナ脱着車両1からの積降方法が完了する。地面JのコンテナC4tをコンテナ脱着車両1上に積載するには、前記ステップ1〜5を逆に行う。
【0086】
<積降方法(2t)について>
コンテナC2tの積降方法を図29〜図33を用いて説明する。積み降ろしが完了するまでフックアーム8と掛止部Tとが係合したままの状態である。図25(b)及び図32(a)の積載状態に示す通り、スライドアーム7及びフックアーム8の位置は第1位置から第3位置に変更する。この第3位置は、第1位置、第2位置よりも後方に位置が設定する。(図3参照)。フックシリンダ11を収縮する作動をさせ、フックアーム8を下降させ、点線位置から実線位置に下降させ、掛止部Tの高さに合致するように高さも調整する。第3位置ではコンテナC2tが積載状態となっている。第3位置を始点として積降方法(2t)を行う。
【0087】
図29(a)に示す通り、第3位置からスライドシリンダ10を収縮作動させることにより、スライドアーム7とフックアーム8を後退させて、スライドシリンダ10を収縮作動させ、スライドアーム7とフックアーム8を第3位置から第4位置まで後退させる(図32(b)参照)。コンテナC2tのレールR2tは側フレーム30及びローラ36上をスライドして後方に水平移動する。固縛解除ステップ1’により、第2固縛部14とピンP2tとの固縛を解除する。
【0088】
次に図29(b)(c)に示す通りメインシリンダ9を伸長作動させ、支持アーム6、スライドアーム7及びフックアーム8が軸60を中心に車体長手方向に回動する(回動ステップ2’、回動ステップ3’)。コンテナC2tは側フレーム30及びローラ36上を後方に移動する。車輪Wは地面Jから浮いた状態で、フックアーム8とローラ36でコンテナC2tを支持する。
【0089】
図29(c)から図30(a)に示す位置までメインシリンダ9を伸長作動させメインシリンダ9を停止する。このときの支持アーム6の角度は水平から60°〜70°(図面は65°)が好ましい。この角度位置は後輪Lが接地し始める位置に設定してある。この位置から、フックアーム8を短縮させたままメインシリンダ9を伸長させると、コンテナC2tの前脚Lがローラ36と衝突する、フックアーム8に負荷がかかる等の種々の不都合がある。そこで、フックシリンダ11を伸長作動させ、フックアーム8を図30(a)の二点鎖線位置まで斜め上方に向けてスライドさせ、その後の旋回半径を大きくする(フックアーム伸長ステップ4’)。フックシリンダ11の伸長動作に代えて、又は、これに加えてスライドシリンダ10の伸長作動でもよい。
【0090】
図30(b)の位置からメインシリンダ9を伸長作動させると、コンテナC4tがローラ36から浮き上がり、コンテナC4tの車輪Wが地面Jに着地する(以下、回動ステップ5’という)。
【0091】
図30(b)の位置からメインシリンダ9を伸長作動させると、車輪Wが転がりながらコンテナC2tが後方に移動する(着地ステップ6’)。
【0092】
図31(a)の位置からメインシリンダ9を伸長作動させることにより、図31(b)に示す通り、コンテナC2tの車輪W及び脚部Lが地面Jに着地する(着地ステップ7’)。コンテナC2tのコンテナ脱着車両1からの積み降ろし作動が完了する。地面JのコンテナC2tをコンテナ脱着車両1上に積載するには、前記ステップ1’〜7’を逆に行なう。
【0093】
<ダンプ作動(4t、2t)について>
コンテナC4t,C2tに関しコンテナ脱着車両1のダンプ動作を説明すると、図25(a)(b)に示す積載状態において、ダンプ・ロックシリンダ54を伸長させると、フックプレート53がフック91と係合し、ダンプフレーム5と支持アーム6を一直線上にロックする。図34(a)(b)に示す通り、メインシリンダ9を伸長させると、キャリア部4は一体となって横軸35を中心として後方に回動し、コンテナC4t,C2tをダンプ上げし、コンテナC4t,C2t内の収容物を外部に排出する。又、メインシリンダ9を収縮させれば、コンテナC4t,C2tをダンプ下げして車体部2上にキャリア部4を降ろす。ダンプ作動時には固縛装置12はピンP2t又はP4tを固縛する。
【0094】
<実施形態の効果>
フックアーム8をスライドアーム7に対して伸縮することにより、コンテナの掛止部Tの位置に合わせて、フックアーム8の位置を調節できるので、1種類のコンテナ脱着車両1に入れ替えて積載できる。1種類のコンテナ脱着車両1で様々なニーズに対応できるので、利便性が高くなり、保険料、車検費用、人件費等のコスト削減、駐車スペースの削減ができる。
【0095】
1種類のコンテナ脱着車両で兼用できるので、新たな用途が拡大する。例えば、コンテナ脱着車両1にコンテナC2tを積載し、コンテナC2tを地面においたコンテナC4tの中に積み降ろし、コンテナC4tを反対側から積載して客先まで運搬することで、1種類のコンテナ脱着車両1で2輌のコンテナC2tを一度に運搬できる。
【0096】
コンテナC4t,C2tの脱着の際、フックアーム8をスライドアーム7に対して伸縮することで、コンテナコンテナC4t,C2t等からフックアーム8に加わる衝撃からフックアーム8を保護し、コンテナの脱着の際に行うキャリア部4の回動動作を円滑にできる。
【0097】
固縛装置12の作動により、コンテナC4t,C2tの脱着に際し、固縛装置12と、コンテナC4t,C2t或いはキャリア部4との衝突を回避できる。コンテナC4t,C2tの固定を確実にし、コンテナ脱着車両1の走行中の安全性を高める。
【0098】
スライドシリンダ10を、車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させるので、いずれのコンテナC4t,C2tを適用させる場合であっても、スライドシリンダ10の動きを同一の動きにできるので、固縛或いは固縛解除の構成が簡素になる。車体の横揺れに対して強くなる。
【0099】
操作部20の操作により、自動的にフックプレート53のフックのロック、ロック解除動作を行うので、操作が容易になり、安全性が高くなる。
【0100】
第1固縛部13と第2固縛部14とを、シーソー構造を備える連結部15が連結し、一方の固縛部と他方の固縛部が逆方向に移動するので、固縛シリンダ16の本数を低減でき、制御装置19の構成も簡素にでき、精密な退避動作が可能となる。
【0101】
リミットスイッチ180及び原点センサ181を備えるので、スライドシリンダ10を1本に限定し油圧回路を簡単な構造にし、センサの個数を低減しつつ精密なスライドシリンダ10の位置制御が可能となる。
【0102】
操作部20の操作スイッチの数を低減し、脱着動作、ダンプ動作及び固縛動作の複雑な動きをワンタッチの切換によって簡単に操作することができるので、操作者の負担を軽減できる。
【0103】
≪第2実施形態≫
第2実施形態のコンテナ脱着車両1の固縛装置212について図35〜図37を参照して説明する。この固縛装置212は、車体長手方向にスライドすることで固縛又は固縛解除する構造である。固縛装置212は、ピンP4tを固縛する筒状の第1固縛部213と、ピンP2tを固縛する筒状の第2固縛部214と、フレーム支柱50上を車体長手方向に移動することで、ピンP4tとピンP2tとを交互に固縛をする固縛スライダ215と、固縛スライダ215を駆動する固縛シリンダ(図示略)と、を備える。第1固縛部213、第2固縛部214は自由に昇降できるように保持部材(図示略)が保持する。固縛スライダ215は、車体長手方向の前方に前方に傾斜する傾斜面215aと、車体長手方向の後方に後方に傾斜する傾斜面215bと、上面に上方に突出する突部215cとを備える。傾斜面215aと突部215cの間に平坦部215d、突部215cと傾斜面215bとの間に平坦部215eを備える。第1固縛部213の下部には隙間213aが形成する。第2固縛部214の下部には隙間214aが形成する。図35は固縛スライダ215が中立位置(固縛解除状態)にあるとき、突部215cが第1固縛部213と第2固縛部214の中間に位置する。対応するピンの位置は点線で示す。図36はコンテナC4tの固縛時であり、固縛スライダ215が車体長手方向の前方にスライドし、固縛スライダ215の前方部が隙間213aに差し込まれて、第1固縛部213がロックする。このとき第2固縛部214は自重で降下する。図37はコンテナC2tの固縛時であり、固縛スライダ215が車体長手方向の後方にスライドし、固縛スライダ215の後方部が隙間214aに差し込まれて、第2固縛部214がロックする。このとき第1固縛部213は自重で降下する。なお、第2実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0104】
≪第3実施形態≫
第3実施形態のコンテナ脱着車両1の回動式の固縛装置312を図38〜図40を参照して説明する。固縛装置312は、車体幅方向に回動しピンP4tを固縛する第1固縛部313と、車体幅方向に回動しピンP2tを固縛する第2固縛部314と、車体幅方向に設置し第1固縛部313を駆動する第1固縛シリンダ316と、車体幅方向に設置し第2固縛部314を駆動する第2固縛シリンダ317と、を備える。中立位置で第1固縛部313と第2固縛部314とは直立する。ピンP4tを固縛する場合には、第2固縛シリンダ317が伸長し第2固縛部314が倒伏状態にシフトし、第1固縛シリンダ316が短縮し第1固縛部313が起立状態にシフトし第1固縛部313がピンP4tを固縛する。ピンP2tを固縛する場合には、第1固縛シリンダ316が伸長し第1固縛部313が倒伏状態にシフトし、第2固縛シリンダ317が短縮し第2固縛部314が起立状態にシフトし第2固縛部314がピンP4tを固縛する。固縛装置312は固縛装置12と同様の機能を備える。
【0105】
図39に示す通り、フレーム支柱50に代えて車体長手方向に延びる断面凹状の溝350aを備えるレール受部350を形成し、レールR2t、レールR4tがレール受部350に設けた溝350a内に嵌まる状態で、コンテナC4t,C2tがその上を前後にスライドする。第3実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0106】
≪第4実施形態≫
第4実施形態のコンテナ脱着車両1の可動式のローラ436を図41を参照して説明する。ローラ436はサポート493が支持しローラシリンダ494がサポート493を車体長手方向に回動する構成である。油圧装置17にローラシリンダ494用の切換弁(図示略)を追加し、その出口ポートはローラシリンダ494に接続する。ローラシリンダ494は順次作動制御部197、各部シリンダ緩除装置198が制御し伸縮作動する。図41に示すローラシリンダ494を伸長作動させ、ローラ436を二点鎖線位置から実線位置に移動させる。ローラ436の位置が図41の二点鎖線位置のままであると、コンテナC2tがローラ436上を傾斜しながらスライドする際に、コンテナC2tの傾きが大きくなる。これを防止するため、ローラシリンダ494を伸長作動させ、ローラ436を実線位置に移動させる。車体長手方向長さが短いコンテナC2tであっても、大きく傾けることなく脱着作動を行える。ローラシリンダ494にリミットスイッチ(図示略)を設けて伸縮を制御する。なお、第4実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。ローラ436の回動に代えて水平方向へのスライドしてもよい。
【0107】
≪第5実施形態≫
第5実施形態のコンテナ脱着車両1の傾動式のスライドアーム507を図42を参照して説明する。スライドアーム507は、枢動する2つのケーシング507aと507bとを備え、ケーシング507aを傾動シリンダ511で駆動する。傾動シリンダ511の伸縮によってスライドアーム507aが矢印Zに示す通り傾動する。スライドアーム507aを湾曲形状にしてもよい。なお、第5実施形態の他の構成は第1実施形態と共通するので、説明及び図示は援用する。
【0108】
本発明の実施の形態は、上記の実施形態に何ら限定するものではなく、本発明の技術的思想を逸脱しない範囲において、改変等を加えることができ、それらの改変、均等物等も本発明の技術的範囲に含まれ、該技術的範囲に属する限り種々の形態を採り得る。
【0109】
例えば、ダンプフレーム5に対する支持アーム6の回動を許容するようとした状態でメイン駆動部9を作動させると、ダンプフレーム5を回動させることなく支持アーム6が起伏回動し、コンテナがキャリア部に対して脱着する。支持アーム6とダンプフレーム5とをロックするロック機構を備え、このロックが支持アーム6のダンプフレーム5に対する回動を禁止するように構成する。そして、前後移動するスライドアーム7がロック機構を動かすように構成し、ロック状態とロック解除状態とを切り替える。
【図面の簡単な説明】
【0110】
【図1】第1実施形態のコンテナ脱着車両の荷役フレームを模式的に示した右側面図である。
【図2】(a)は荷役フレームの平面図、(b)はE矢視図である。
【図3】(a)は荷役フレームの右側面図、(b)は同背面図である。
【図4】(a)はコンテナC2t積降時の荷役フレームNの動作図、(b)はコンテナC4t積降時の荷役フレームNの動作図である。
【図5】(a)は図4(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図、(d)はD矢視図である。
【図6】(a)はメインフレームの平面図、(b)は同側面図である。
【図7】(a)はメインフレームの背面図(ローラを取り外した状態)、(b)は同背面図である。
【図8】(a)はダンプフレームの平面図、(b)は同右側面図、(c)は同裏面図である。
【図9】(a)は図8(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図、(d)はD矢視図、(e)はE矢視図である。
【図10】(a)は支持アームの平面図、(b)は同右側面図である。
【図11】(a)は図10(b)のA矢視図、(b)は同B矢視図、(c)は同C矢視図である。
【図12】(a)は(b)のA矢視図、(b)は同右側面図、(c)は同背面端面図、(d)は同正面図である。
【図13】(a)は図12(b)のB矢視図、(b)は同C矢視図である。
【図14】(a)はフックアームの右側面図、(b)は同正面図、(c)は(b)のA矢視図である。
【図15】固縛装置の斜視図である。
【図16】(a)(b)は固縛装置の動作図である。
【図17】(a)は図16(a)のA矢視図、(b)は図16(a)のB矢視図、(c)は図16(b)のC矢視図、(d)は図16(a)のD矢視図である。
【図18】(a)(b)は固縛装置の昇降位置説明図である。
【図19】各シリンダを作動させるための油圧回路図である。
【図20】(a)はメインシリンダの油圧回路図、(b)は固縛シリンダの油圧回路図である。
【図21】(a)はダンプロックシリンダの油圧回路図、(b)はフックシリンダの油圧回路図、(c)はスライドシリンダの油圧回路図である。
【図22】制御装置の電気回路のブロック図である。
【図23】荷役作業の作動制御を示すブロック図である。
【図24】操作部の正面図である。
【図25】本発明の一実施形態に係るコンテナ脱着車両の側面図であり、コンテナの車体部2搭載が終了した時(走行時)の状態を示す図であって、(a)は4tコンテナ搭載時、(b)は2tコンテナ搭載時を示す側面図である。
【図26】コンテナC4tの場合における積降方法を示す側面図であり、(a)は固縛解除ステップ1が終了した時点の状態を示し、(b)は回動ステップ2が終了した時点の状態を示し、(c)は回動ステップ3が終了した時点の状態を示す。
【図27】コンテナC4tの場合における積降方法を示す側面図であり、(a)は着地ステップ4が終了した時点の状態を示し、(b)は着地ステップ5が終了した時点の状態を示す。
【図28】コンテナC4tの場合における脱着アームの動きを示す側面図であり、(a)(b)は積降方法を示す。
【図29】コンテナC2tの場合における積降方法を示す側面図であり、(a)は固縛解除ステップ1’の開始から終了までの状態を示し、(b)は回動ステップ2’が終了した時点の状態を示し、(c)は回動ステップ3’が終了した時点の状態を示す。
【図30】コンテナC2tの場合における積降方法を示す側面図であり、(a)はフックアーム伸長ステップ4’が開始する状態を示し、(b)は回動ステップ5’の作動途中の状態を示す。
【図31】コンテナC2tの場合における積降方法を示す側面図であり、(a)は着地ステップ6’が終了した時点の状態を示し、(b)は着地ステップ7’が終了した時点の状態を示す。
【図32】コンテナC2tの場合における脱着アームの動きを示す側面図であり、(a)は4tから2tへの切換作動、(b)は固縛解除動作を示す。
【図33】コンテナC2tの場合における脱着アームの動きを示す側面図である。
【図34】(a)はコンテナC4tの場合におけるダンプ作動を示す側面図、(b)はコンテナC2tの場合におけるダンプ作動を示す側面図である。
【図35】(a)〜(c)は第2実施形態のコンテナ脱着車両の固縛装置の中立時の説明図である。
【図36】(a)〜(c)は同固縛装置のコンテナC4t固縛時の説明図である。
【図37】(a)〜(c)は同固縛装置のコンテナC2t固縛時の説明図である。
【図38】(a)(b)は第3実施形態のコンテナ脱着車両を示し、(a)は、コンテナ脱着車両の右側面図、(b)は同荷役フレームの平面図である。
【図39】(a)はコンテナC4tを荷役フレームに積込した状態の背面図、(b)はコンテナC2tを荷役フレームに積込した状態の背面図である。
【図40】(a)は図38(b)のA矢視図、図40(b)(f)はB矢視図、図40(c)(g)はC矢視図、図40(d)(h)はD矢視図、図40(e)(i)はE矢視図、又、(a)〜(e)はコンテナC4tを積み込んだ状態の矢視図、(a)及び(f)〜(i)はコンテナC2tを積み込んだ状態の矢視図である。
【図41】第4実施形態のコンテナ脱着車両の荷役フレームの模式図である。
【図42】第5実施形態のコンテナ脱着車両の荷役フレームの模式図である。
【図43】従来のコンテナ脱着車両の説明図である。
【符号の説明】
【0111】
1・・・コンテナ脱着車両 2・・・車体部 3・・・メインフレーム
4・・・キャリア部 5・・・ダンプフレーム 6・・・支持アーム
7・・・スライドアーム 8・・・フックアーム 9・・・メインシリンダ
10・・・スライドシリンダ 11・・・フックシリンダ
12,212・・・固縛装置 13,213,313・・・第1固縛部
14,214,314・・・第2固縛部 15・・・連結部
16,316a,316b・・・固縛シリンダ 17・・・油圧装置
18・・・各種センサ 19・・・電子制御装置 36・・・ローラ
215・・・固縛スライダ
C2t,C4t・・・コンテナ P2t,P4t・・・ピン T・・・掛止部
W・・・車輪 L・・・脚部 R2t,R4t・・・レール
【特許請求の範囲】
【請求項1】
車体部と、
該車体部の車台に取り付けたメインフレームと、
前記メインフレームに連結するダンプフレームと、
前記ダンプフレームに対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部と、
前記キャリア部を駆動する駆動部と、
前記駆動部を制御する制御部と、を備え、
前記キャリア部が、
該ダンプフレームに車体長手方向に回動自在に連結する支持アームと、
該支持アームの軸方向にスライドするスライドアームと、
前記スライドアームの縦ケーシングの軸方向に沿ってスライドするとともに前記コンテナの掛止部と掛止するフックを有するフックアームと、を備え、
前記駆動部が、
前記キャリア部を回動するメイン駆動部と、
前記スライドアームをスライドするスライド駆動部と、
前記フックアームをスライドするフック駆動部と、を備え、
前記制御部から前記駆動部に出力する信号を前記複数種類のコンテナに対応させて設定し、該信号に応じて前記駆動部の駆動状態を相違させ、前記複数種類のコンテナのいずれも脱着することを特徴とするコンテナ脱着車両。
【請求項2】
前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて、前記キャリア部又は前記ダンプフレームにそれぞれ相違する位置に配置する可動式の複数種類の固縛部と、該複数種類の固縛部を駆動する固縛駆動部と、を備える固縛装置を設け、
前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、該他方の固縛部を前記一方の係合部に衝突しないように移動させる請求項1のコンテナ脱着車両。
【請求項3】
前記キャリア部は積載容積の相違する少なくとも2種類の第1コンテナと、第2コンテナと、を積載し、
前記固縛部は、前記2種類のコンテナの底面部にそれぞれ設けられた第1係合部及び第2係合部をそれぞれ固縛する第1固縛部及び第2固縛部を備え、
前記第1固縛部は前記第2固縛部に対し前記ダンプフレームに対して車体長手方向に相違する位置に配置し、
前記スライドアームが前記車体長手方向にスライドすることにより、前記キャリア部に水平に積載した状態の前記コンテナの前記第1係合部を前記第1固縛部が固縛或いは固縛解除し、前記第2係合部を前記第2固縛部が固縛或いは固縛解除する請求項2のコンテナ脱着車両。
【請求項4】
前記制御部は、前記フックアームを、前記車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させ、前記第1位置から第2位置に前記フックアームをスライドすることにより、積載容積の大きなコンテナの固縛を解除し、前記フックアームを前記第3位置から第4位置にスライドすることにより、積載容積の小さなコンテナの固縛を解除する請求項2又は3のコンテナ脱着車両。
【請求項5】
前記フックアームが前記第1位置または前記第3位置にて停止した状態で、前記制御部は、操作部のダンプ操作により、前記ダンプフレームを前記支持アームに自動的にロックし、前記支持アームの前記ダンプフレームに対する回動を禁止する請求項4のコンテナ脱着車両。
【請求項6】
前記固縛部は、昇降、回動、又は車体長手方向にスライドする請求項2乃至4いずれかのコンテナ脱着車両。
【請求項7】
前記固縛部は前記ダンプフレームの軸方向に対し垂直方向への昇降動作を行なう構造を備え、車体長手方向の前方に配置する第1固縛部と、該第1固縛部に対し車体長手方向の後方に配置する第2固縛部とを備え、該第1固縛部と、第2固縛部とを、シーソー機構を備える連結部が連結し、一方の固縛部と他方の固縛部が逆方向に移動する請求項6のコンテナ脱着車両。
【請求項8】
前記固縛部は車体幅方向に回動動作を行なう第1固縛部及び第2固縛部を備え、一方の固縛部が起立すると、他方の固縛部が倒伏する請求項6のコンテナ脱着車両。
【請求項9】
前記固縛部は車体長手方向にスライドするスライド部を備え、該スライド部がスライドすると、第1固縛部及び第2固縛部のいずれか一方を固縛し、他方の固縛部を固縛解除する請求項6のコンテナ脱着車両。
【請求項10】
前記制御部は、前記フックアームを少なくとも3つの高さ位置に制御する回路を備え、
積載容積が大きなコンテナを前記キャリア部に脱着するとき、前記フック駆動部は伸長位置を維持し、
積載容積が小さなコンテナを脱着するときに、前記キャリア部の回動位置が所定位置よりも車体後方である場合には、前記フックアームは前記伸長位置よりもさらに伸長させた最大伸長位置を維持し、前記回動位置が所定位置よりも車体前方である場合には、短縮位置を維持する請求項1のコンテナ脱着車両。
【請求項11】
前記スライド駆動部は、1本の油圧駆動部と、該油圧駆動部の原点を検出する原点センサと、前記油圧駆動部のロッドの位置を検出するエンコーダとを備え、前記制御部は前記ロッドの位置を数値制御する制御回路を備え、設定する目標位置に前記ロッドが接近したとき、前記油圧駆動部の速度を減速する請求項1のコンテナ脱着車両。
【請求項12】
前記制御部が操作部を備え、該操作部は、2種類のコンテナに対応する2個の脱着/ダンプ兼用スイッチ、2種類のコンテナに対応する2個のダンプ/脱着切換スイッチを備え、該スイッチに対応して前記制御部に順次制御を設定する請求項1乃至10いずれかのコンテナ脱着車両。
【請求項13】
前記スライドアームは、枢動する2つのケーシングを備え、該ケーシングを傾動シリンダで駆動する請求項1のコンテナ脱着車両。
【請求項14】
車体部と、
該車体部の車台に取り付けたメインフレームと、
前記メインフレームに連結するダンプフレームと、
前記ダンプフレームに対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部と、
前記キャリア部を駆動する駆動部と、
前記駆動部を制御する制御部と、を備え、
前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて前記キャリア部又はダンプフレームにそれぞれ相違する位置に配置する可動式の複数種類の固縛部と、該複数種類の固縛部を駆動する固縛駆動部と、を備える固縛装置を設け、
前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、該他方の固縛部を前記一方の係合部に衝突しないように移動させるコンテナ脱着車両。
【請求項15】
車台上に取り付けたメインフレームにダンプフレームを備え、該ダンプフレームに対してメイン駆動部が、支持アームとスライドアームを供えるL型のキャリア部を、車体長手方向に回動させ、スライド駆動部が前記スライドアームを前記支持アームに対してスライドさせ、前記フックアームを前記スライドアームに対してスライドさせ、
積載容積が大きな第1コンテナと、該第1コンテナよりも積載容積が小さな第2コンテナを含む、複数のコンテナを車両後部から車体長手方向に移動させて脱着させ、
前記コンテナを積載した状態で走行する場合には固縛装置が前記コンテナを固縛するコンテナ脱着方法において、
(1)第1コンテナを積み降す際、
a.車体長手方向の前方側の第1位置で前記フックアームを停止させ、前記フックアームを伸長位置で停止させ、前記固縛装置がコンテナを水平に固縛した状態で走行可能状態に設定する積載ステップと、
b.前記第1位置から車体長手方向の後方側の第2位置に前記フックアーム及びスライドアームを車体長手方向にスライドさせ、前記第1コンテナと前記固縛装置との固縛を解除する固縛解除ステップと、
c.前記キャリア部を前記ダンプフレームに対して車体長手方向の後方に回動させながら、案内部でコンテナ底部レールを案内し、前記第1コンテナの後部輪を着地させる回動ステップと、を備え、
(2)第2コンテナを積み降す際、
a.前記(1)a.の前記第1位置よりも車体長手方向の後方側に設定した第3位置で前記フックアームを停止させ、該フックアームを前記スライドアームに対して短縮位置で停止させ、前記固縛装置がコンテナを水平に固縛した状態で走行可能状態に設定する積載ステップと、
b.前記第3位置よりも車体後方側に設定した第4位置に前記フックアームをスライドさせ、前記第2コンテナと固縛装置との固縛を解除する固縛解除ステップと、
c.前記キャリア部を前記ダンプフレームに対して後方に回動させ、前記案内部が前記コンテナ底部レールを案内する第1案内ステップと、
d.コンテナ後部車輪が着地したときに前記キャリア部を所定角度で停止させる停止ステップと、
e.前記停止中に前記フックアームを前記スライドアームから伸長させる伸長ステップと、
f.前記キャリア部を前記ダンプフレームに対して後方に回動させ、前記案内部の上空を前記コンテナ底部レールが通過し、前記第2コンテナの後部輪を着地させる第2案内ステップと、
を備えることを特徴とするコンテナ脱着方法。
【請求項16】
車台上に取り付けたメインフレームにダンプフレームを備え、該ダンプフレームに対してメイン駆動部がキャリア部を車体長手方向に回動させ、スライド駆動部がスライドアームをスライドさせ、フック駆動部がフックアームをスライドさせ、
積載容積が大きな第1コンテナと、該第1コンテナよりも積載容積が小さな第2コンテナを含む、複数のコンテナを車両後部から車体長手方向に移動させて脱着させ、
前記コンテナを積載した状態で走行する場合には固縛装置が前記コンテナを固縛するコンテナ脱着方法において、
(1)第1コンテナを積み込む際、
a.伸長位置で停止させた前記フックアームを、水平に着地した前記第1コンテナに掛止する掛止ステップと、
b.前記キャリア部を前記ダンプフレームに対して前方に回動させながら、前記第1コンテナの前脚を地面から離脱させ、案内部でコンテナ底部レールを案内し前記フックアームを第2位置に移動する回動ステップと、
c.前記第2位置から車体前方側の第1位置に前記フックアーム及びスライドアームをスライドさせ、前記第1コンテナを固縛装置で固縛する固縛ステップと、
d.前記車体の前方側の第1位置で前記キャリア部を停止させ、前記コンテナを走行可能状態に設定する積載ステップと、を備え、
(2)第2コンテナを積み込む際、
a.伸長位置で停止させた前記フックアームを、水平に着地した前記第2コンテナに掛止する掛止ステップと、
b.前記キャリア部を前記ダンプフレームに対して車体長手方向の前方に回動させ、前記コンテナの前脚を地面から離脱させ、前記コンテナ底部レールが前記案内部の上空を通過する第1案内ステップと、
c.コンテナ後部車輪が離陸するときに前記キャリア部を停止させる停止ステップと、
d.前記停止中に前記フックアームを前記スライドアームに対して短縮させる短縮ステップと、
e.前記キャリア部を前記メインフレームに対して前方に回動させながら、案内部によりフックアームが第4位置に至るまで前記コンテナ底部レールを案内する第2案内ステップと、
f.前記第4位置よりも車体長手方向の前方であって且つ前記(1)c.の前記第1位置よりも車体長手方向の後方側に設定した第3位置に前記フックアーム及びスライドアームをスライドさせ、前記第2コンテナを固縛装置で固縛する固縛ステップと、
g.前記第3位置で前記フックアーム及びスライドアームを停止させ、前記コンテナを走行可能状態に設定する積載ステップと、
を備えることを特徴とするコンテナ脱着方法。
【請求項1】
車体部と、
該車体部の車台に取り付けたメインフレームと、
前記メインフレームに連結するダンプフレームと、
前記ダンプフレームに対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部と、
前記キャリア部を駆動する駆動部と、
前記駆動部を制御する制御部と、を備え、
前記キャリア部が、
該ダンプフレームに車体長手方向に回動自在に連結する支持アームと、
該支持アームの軸方向にスライドするスライドアームと、
前記スライドアームの縦ケーシングの軸方向に沿ってスライドするとともに前記コンテナの掛止部と掛止するフックを有するフックアームと、を備え、
前記駆動部が、
前記キャリア部を回動するメイン駆動部と、
前記スライドアームをスライドするスライド駆動部と、
前記フックアームをスライドするフック駆動部と、を備え、
前記制御部から前記駆動部に出力する信号を前記複数種類のコンテナに対応させて設定し、該信号に応じて前記駆動部の駆動状態を相違させ、前記複数種類のコンテナのいずれも脱着することを特徴とするコンテナ脱着車両。
【請求項2】
前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて、前記キャリア部又は前記ダンプフレームにそれぞれ相違する位置に配置する可動式の複数種類の固縛部と、該複数種類の固縛部を駆動する固縛駆動部と、を備える固縛装置を設け、
前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、該他方の固縛部を前記一方の係合部に衝突しないように移動させる請求項1のコンテナ脱着車両。
【請求項3】
前記キャリア部は積載容積の相違する少なくとも2種類の第1コンテナと、第2コンテナと、を積載し、
前記固縛部は、前記2種類のコンテナの底面部にそれぞれ設けられた第1係合部及び第2係合部をそれぞれ固縛する第1固縛部及び第2固縛部を備え、
前記第1固縛部は前記第2固縛部に対し前記ダンプフレームに対して車体長手方向に相違する位置に配置し、
前記スライドアームが前記車体長手方向にスライドすることにより、前記キャリア部に水平に積載した状態の前記コンテナの前記第1係合部を前記第1固縛部が固縛或いは固縛解除し、前記第2係合部を前記第2固縛部が固縛或いは固縛解除する請求項2のコンテナ脱着車両。
【請求項4】
前記制御部は、前記フックアームを、前記車体の前方側から順に、第1位置、第2位置、第3位置、第4位置にて停止させ、前記第1位置から第2位置に前記フックアームをスライドすることにより、積載容積の大きなコンテナの固縛を解除し、前記フックアームを前記第3位置から第4位置にスライドすることにより、積載容積の小さなコンテナの固縛を解除する請求項2又は3のコンテナ脱着車両。
【請求項5】
前記フックアームが前記第1位置または前記第3位置にて停止した状態で、前記制御部は、操作部のダンプ操作により、前記ダンプフレームを前記支持アームに自動的にロックし、前記支持アームの前記ダンプフレームに対する回動を禁止する請求項4のコンテナ脱着車両。
【請求項6】
前記固縛部は、昇降、回動、又は車体長手方向にスライドする請求項2乃至4いずれかのコンテナ脱着車両。
【請求項7】
前記固縛部は前記ダンプフレームの軸方向に対し垂直方向への昇降動作を行なう構造を備え、車体長手方向の前方に配置する第1固縛部と、該第1固縛部に対し車体長手方向の後方に配置する第2固縛部とを備え、該第1固縛部と、第2固縛部とを、シーソー機構を備える連結部が連結し、一方の固縛部と他方の固縛部が逆方向に移動する請求項6のコンテナ脱着車両。
【請求項8】
前記固縛部は車体幅方向に回動動作を行なう第1固縛部及び第2固縛部を備え、一方の固縛部が起立すると、他方の固縛部が倒伏する請求項6のコンテナ脱着車両。
【請求項9】
前記固縛部は車体長手方向にスライドするスライド部を備え、該スライド部がスライドすると、第1固縛部及び第2固縛部のいずれか一方を固縛し、他方の固縛部を固縛解除する請求項6のコンテナ脱着車両。
【請求項10】
前記制御部は、前記フックアームを少なくとも3つの高さ位置に制御する回路を備え、
積載容積が大きなコンテナを前記キャリア部に脱着するとき、前記フック駆動部は伸長位置を維持し、
積載容積が小さなコンテナを脱着するときに、前記キャリア部の回動位置が所定位置よりも車体後方である場合には、前記フックアームは前記伸長位置よりもさらに伸長させた最大伸長位置を維持し、前記回動位置が所定位置よりも車体前方である場合には、短縮位置を維持する請求項1のコンテナ脱着車両。
【請求項11】
前記スライド駆動部は、1本の油圧駆動部と、該油圧駆動部の原点を検出する原点センサと、前記油圧駆動部のロッドの位置を検出するエンコーダとを備え、前記制御部は前記ロッドの位置を数値制御する制御回路を備え、設定する目標位置に前記ロッドが接近したとき、前記油圧駆動部の速度を減速する請求項1のコンテナ脱着車両。
【請求項12】
前記制御部が操作部を備え、該操作部は、2種類のコンテナに対応する2個の脱着/ダンプ兼用スイッチ、2種類のコンテナに対応する2個のダンプ/脱着切換スイッチを備え、該スイッチに対応して前記制御部に順次制御を設定する請求項1乃至10いずれかのコンテナ脱着車両。
【請求項13】
前記スライドアームは、枢動する2つのケーシングを備え、該ケーシングを傾動シリンダで駆動する請求項1のコンテナ脱着車両。
【請求項14】
車体部と、
該車体部の車台に取り付けたメインフレームと、
前記メインフレームに連結するダンプフレームと、
前記ダンプフレームに対し車体長手方向に回動自在に結合し、積載容積の相違する複数種類のコンテナを車両後部から脱着するL型のキャリア部と、
前記キャリア部を駆動する駆動部と、
前記駆動部を制御する制御部と、を備え、
前記前記複数種類のコンテナの底面に形成する係合部の種類に対応させて前記キャリア部又はダンプフレームにそれぞれ相違する位置に配置する可動式の複数種類の固縛部と、該複数種類の固縛部を駆動する固縛駆動部と、を備える固縛装置を設け、
前記複数種類のコンテナを脱着するときに前記種類に応じて前記制御部から前記固縛駆動部へ出力する信号を複数種類に設定し、前記複数の固縛部のうちいずれか一方の固縛部が対応する一方の係合部を固縛するときには、該他方の固縛部を前記一方の係合部に衝突しないように移動させるコンテナ脱着車両。
【請求項15】
車台上に取り付けたメインフレームにダンプフレームを備え、該ダンプフレームに対してメイン駆動部が、支持アームとスライドアームを供えるL型のキャリア部を、車体長手方向に回動させ、スライド駆動部が前記スライドアームを前記支持アームに対してスライドさせ、前記フックアームを前記スライドアームに対してスライドさせ、
積載容積が大きな第1コンテナと、該第1コンテナよりも積載容積が小さな第2コンテナを含む、複数のコンテナを車両後部から車体長手方向に移動させて脱着させ、
前記コンテナを積載した状態で走行する場合には固縛装置が前記コンテナを固縛するコンテナ脱着方法において、
(1)第1コンテナを積み降す際、
a.車体長手方向の前方側の第1位置で前記フックアームを停止させ、前記フックアームを伸長位置で停止させ、前記固縛装置がコンテナを水平に固縛した状態で走行可能状態に設定する積載ステップと、
b.前記第1位置から車体長手方向の後方側の第2位置に前記フックアーム及びスライドアームを車体長手方向にスライドさせ、前記第1コンテナと前記固縛装置との固縛を解除する固縛解除ステップと、
c.前記キャリア部を前記ダンプフレームに対して車体長手方向の後方に回動させながら、案内部でコンテナ底部レールを案内し、前記第1コンテナの後部輪を着地させる回動ステップと、を備え、
(2)第2コンテナを積み降す際、
a.前記(1)a.の前記第1位置よりも車体長手方向の後方側に設定した第3位置で前記フックアームを停止させ、該フックアームを前記スライドアームに対して短縮位置で停止させ、前記固縛装置がコンテナを水平に固縛した状態で走行可能状態に設定する積載ステップと、
b.前記第3位置よりも車体後方側に設定した第4位置に前記フックアームをスライドさせ、前記第2コンテナと固縛装置との固縛を解除する固縛解除ステップと、
c.前記キャリア部を前記ダンプフレームに対して後方に回動させ、前記案内部が前記コンテナ底部レールを案内する第1案内ステップと、
d.コンテナ後部車輪が着地したときに前記キャリア部を所定角度で停止させる停止ステップと、
e.前記停止中に前記フックアームを前記スライドアームから伸長させる伸長ステップと、
f.前記キャリア部を前記ダンプフレームに対して後方に回動させ、前記案内部の上空を前記コンテナ底部レールが通過し、前記第2コンテナの後部輪を着地させる第2案内ステップと、
を備えることを特徴とするコンテナ脱着方法。
【請求項16】
車台上に取り付けたメインフレームにダンプフレームを備え、該ダンプフレームに対してメイン駆動部がキャリア部を車体長手方向に回動させ、スライド駆動部がスライドアームをスライドさせ、フック駆動部がフックアームをスライドさせ、
積載容積が大きな第1コンテナと、該第1コンテナよりも積載容積が小さな第2コンテナを含む、複数のコンテナを車両後部から車体長手方向に移動させて脱着させ、
前記コンテナを積載した状態で走行する場合には固縛装置が前記コンテナを固縛するコンテナ脱着方法において、
(1)第1コンテナを積み込む際、
a.伸長位置で停止させた前記フックアームを、水平に着地した前記第1コンテナに掛止する掛止ステップと、
b.前記キャリア部を前記ダンプフレームに対して前方に回動させながら、前記第1コンテナの前脚を地面から離脱させ、案内部でコンテナ底部レールを案内し前記フックアームを第2位置に移動する回動ステップと、
c.前記第2位置から車体前方側の第1位置に前記フックアーム及びスライドアームをスライドさせ、前記第1コンテナを固縛装置で固縛する固縛ステップと、
d.前記車体の前方側の第1位置で前記キャリア部を停止させ、前記コンテナを走行可能状態に設定する積載ステップと、を備え、
(2)第2コンテナを積み込む際、
a.伸長位置で停止させた前記フックアームを、水平に着地した前記第2コンテナに掛止する掛止ステップと、
b.前記キャリア部を前記ダンプフレームに対して車体長手方向の前方に回動させ、前記コンテナの前脚を地面から離脱させ、前記コンテナ底部レールが前記案内部の上空を通過する第1案内ステップと、
c.コンテナ後部車輪が離陸するときに前記キャリア部を停止させる停止ステップと、
d.前記停止中に前記フックアームを前記スライドアームに対して短縮させる短縮ステップと、
e.前記キャリア部を前記メインフレームに対して前方に回動させながら、案内部によりフックアームが第4位置に至るまで前記コンテナ底部レールを案内する第2案内ステップと、
f.前記第4位置よりも車体長手方向の前方であって且つ前記(1)c.の前記第1位置よりも車体長手方向の後方側に設定した第3位置に前記フックアーム及びスライドアームをスライドさせ、前記第2コンテナを固縛装置で固縛する固縛ステップと、
g.前記第3位置で前記フックアーム及びスライドアームを停止させ、前記コンテナを走行可能状態に設定する積載ステップと、
を備えることを特徴とするコンテナ脱着方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【公開番号】特開2007−223367(P2007−223367A)
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願番号】特願2006−44071(P2006−44071)
【出願日】平成18年2月21日(2006.2.21)
【出願人】(399016695)株式会社瑞穂 (13)
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願日】平成18年2月21日(2006.2.21)
【出願人】(399016695)株式会社瑞穂 (13)
[ Back to top ]