
コンバイナ及びコンバイナによる容器の搬送方法
【課題】本発明は容器の転倒やジャミングを防止すると共に、容器が隣の大きな搬送速度のコンベヤに移ったときの容器の加速力を増して、容器の搬送能力が大きく、機長が短く設置スペースの小さい装置を提供する。
【解決手段】同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させる。
【解決手段】同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上流の入口コンベヤ上に横方向に隣接し直立して供給される瓶や缶等の複数列の容器を下流の出口コンベヤから1列に整列させて排出するコンバイナ及びコンバイナによる容器の搬送方法に関する。
【背景技術】
【0002】
コンバイナは、特許文献2に開示されているように、充填装置や、ラベラ装置や、検査装置などの壜や缶などの縦長の容器を扱う装置の上流に設置し、上流側から複数列のコンベヤによって前後左右を互いに接触しながら供給される容器を、間隔をあけて1列に並べて下流側に送出する搬送装置である。
【0003】
代表的な従来のコンバイナの構成を図5(特許文献1の第4図に相当する)及び図6によって説明する。
図5はその従来のコンバイナの平面図、図6は図5におけるII矢視図である。
両図において、1は駆動モータ6で駆動され、搬送速度が同じ複数列(図では4列)のスラットチェンコンベヤ(以下単にコンベヤと呼ぶ)で成る入口コンベヤ、2は駆動モータ7で駆動され、搬送速度がそれぞれ異なる複数列(図では6列)のコンベヤで成る速度差コンベヤ、また、3は駆動モータ8で駆動される1列のコンベヤの出口コンベヤである。これらのコンベヤは図6に示すように何れも水平に設置されている。
速度差コンベヤ2は入口コンベヤ1の隣に、出口コンベヤ3は速度差コンベヤ2の隣に、それぞれの一部を相手のコンベヤと搬送方向に併走させている。
速度差コンベヤ2の各列の速度は、スプロケットトレイン9によって増速され、入口コンベヤ1から出口コンベヤ3の方向に順次大きくなっていて、入口コンベヤ1の速度より大きく、出口コンベヤ3より小さくなっている。図5の右側に示す矢印は、コンベヤ速度の大きさを示している。
4及び5は、それぞれコンベヤの上側の適宜の高さで、容器の搬送方向の両側に設けられた主ガイド及び副ガイドで、両者は入口コンベヤ1の上流側及び出口コンベヤ3の下流側では搬送方向に平行に、その間では搬送方向に斜交していて両者の間隔は下流側が狭くなっている。10は容器で、図は缶の場合を示している。
【0004】
上記構成の従来のコンバイナの作用を説明する。
入口コンベヤ1から前後及び左右を互いに接触させて複数列で供給された容器10は、下流側に進んで鋭角で主ガイド4に当接し、主ガイド4の側面から受ける反力によって速度差コンベヤ2の方向に移動し、更に搬送速度の大きいコンベヤの方向に移動して速度を増す。このように速度を増した容器10は互いの間隔を広げて出口コンベヤ3では1列となって下流側に送出される。なお、副ガイド5は容器10が反対側に自由に広がるのを規制して、流れに淀みができたり容器10が転倒するのを防いでいる。
【0005】
【特許文献1】特開平3−143823号公報(第4図)
【特許文献2】特開昭62−42805号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0006】
コンバイナの下流に配設される充填装置や、ラベラ装置や、検査装置の能力向上に伴い、コンバイナもこれに対応して能力の向上が必要となっており、容器の搬送能力が大きく、機長が短く設置スペースの小さい装置の提供が望まれている。
しかし、上述の従来のコンバイナでは、搬送速度を大きくすると、容器がガイドと当接するときに受ける衝撃力によって、また搬送速度の大きいコンベヤに乗移るときにコンベヤから受ける摩擦力によって容器が転倒し易く、あるいは主ガイドと副ガイドの間に容器がブリッジ状に詰まり(ジャミング)を生じて運転を妨げるという問題がある。
本発明は容器の転倒やジャミングを防止すると共に、容器が隣の大きな搬送速度のコンベヤに移ったときの容器の加速力を増して、上述の問題点を解決したコンバイナ及びコンバイナによる容器の搬送方法の提供を目的としている。
【課題を解決するための手段】
【0007】
上記問題点に対し、本発明は以下の各手段により課題の解決を図る。
(1)第1の手段のコンバイナは、同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させたことを特徴とする。
【0008】
前記コンバイナを形成する3つのコンベヤを、速度差コンベヤの上流側端から下流側端までの範囲で搬送方向上流側から下流側へ向けて下向き傾斜させることにより、傾斜によって生ずる容器にはたらく重力の搬送方向への分力と、コンベアから受ける摩擦力によって、容器を移送先のコンベアの搬送速度まで加速させることが可能となる。
【0009】
(2)搬送する容器の直径をd、容器の重心の高さをhとしたとき、前記3つのコンベヤの傾斜角度αを
α<arctan(d/2h)
の範囲で傾斜させることを特徴とする。
【0010】
傾斜角度αをα<arctan(d/h)の範囲とすることで、容器の重心位置が、コンベアとの接触面であり搬送方向先端位置よりも搬送方向上流側に位置するようになるため、容器が搬送方向側に転倒しなくなる。
【0011】
(3)前記入口コンベヤと前記速度差コンベヤ中の最低搬送速度のコンベヤとの速度差及び前記傾斜角度αを、前記容器が入口コンベヤ上から速度差コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする。
このことにより、容器が入口コンベヤから速度差コンベヤに移動した際に、容器の転倒を防止しつつ移動先の速度差コンベアの搬送速度まで加速させることが可能となる。
【0012】
(4)前記速度差コンベヤ中の最高搬送速度のコンベヤと前記出口コンベヤとの速度差及び前記傾斜角度αを、前記容器が速度差コンベヤ上から出口コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする。
このことにより、容器が速度差コンベヤから出口コンベヤに移動した際に、容器の転倒を防止しつつ移動先の出口コンベヤの搬送速度まで加速させることが可能となる。
【0013】
(5)第5の手段のコンバイナによる容器の搬送方法は、順次搬送速度が大きくなる複数列のコンベヤを隣接させ、該コンベヤ上に載置されて走行する容器をガイドによって順次速度の大きいコンベヤに移送させて増速させ、複数列で受け入れた容器を1列に整列させて排出するコンバイナによる容器の搬送方法において、水平方向に対して搬送方向に前下りにコンベヤの摩擦角より小さい傾斜角度で傾斜させ、傾斜によって生ずる容器にはたらく重力の搬送方向への分力とコンベヤから受ける摩擦力とによって、容器を移送先のコンベヤの搬送速度まで加速することを特徴とする。
【発明の効果】
【0014】
以上記載のごとく本発明によれば、コンバイナの流れ方向への前下がりの傾斜をつけることにより、コンベア自体の高摩擦係数化に伴う容器の転倒やジャミングといったリスクを増大させることなく、同傾斜によって生ずる容器にはたらく重力の搬送方向への分力と、コンベアから受ける摩擦力によって、容器を移送先のコンベアの搬送速度まで加速させることが可能となり、従来と同等の機長で、高速化、高能力化を実現できるとともに、従来と同等の能力をコンバイナの機長を短縮したもので達成可能となり、省スペース化を図ることができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【実施例1】
【0016】
本発明のコンバイナの実施の形態を図1〜図5によって説明する。図1はコンバイナの正面図、図2は容器に作用する外力と反力の関係を示す説明図、図3は容器を加速する搬送方向の力と、コンベアの傾斜角の関係を示すダイヤグラム、図4は容器が1つのコンベヤから隣接する搬送速度の速いコンベヤに移動する状態を示す部分平面図である。この実施の形態のコンバイナは前述の従来例と同様の構成であり、平面図は従来例の図5とほぼ同様なので、図5を流用することとし、本実施の形態を表す場合は従来例の番号に50を加えて表すこととする。
【0017】
このコンバイナは、複数列の同じ搬送速度のコンベヤ(スラットチエンコンベヤ)で成る入口コンベヤ51と、この入口コンベヤ51に隣接して一部が併走する順次に搬送速度を増す複数列のコンベヤで成る速度差コンベヤ52と、この速度差コンベヤ52に隣接し一部が併走する搬送速度が最大の1列のコンベヤの出口コンベヤ53と、これらのコンベヤの上部を斜めに走り、下流側が狭くなる主ガイド54及び副ガイド55で構成されたコンバイナであって、速度差コンベヤ52の上流側端Aから下流側端Bまでの間にあるこれらの3つのコンベヤを、水平面に対して下流側が下がる摩擦角θより小さい角度αの勾配をつける。従って入口コンベヤ51の下流側の一部、及び出口コンベヤ53の上流側の一部の併走部分も傾斜することになる。
また、入口コンベヤ51、速度差コンベヤ52、及び出口コンベヤ53の容器10に対する摩擦角θは極力小さくする。なお、図1に示す速度差コンベヤ52の駆動モータ57は直交軸型駆動モータをコンベヤフレームに取付けた場合を示してあり、その他の駆動モータや変速用のスプロケットトレイン等は図示を省略してある。
【0018】
ここで、前記入口コンベヤ51を形成する各コンベアの搬送速度をv51、前記速度差コンベヤ52を形成するコンベヤの搬送速度を前記入口コンベヤと隣接するコンベヤから順にv521、v522、v523、v524、v525、v526、前記出口コンベヤの搬送速度をv53とすると、
v51<v521<v522<v523<v524<v525<v526<v53
が成立する。
なお、各コンベアの搬送速度の関係は、これに限定するものではないが、後述する理由により、本実施例のように容器10の移動に従って順次搬送速度を増すようにするとよい。
【0019】
また、前記速度差コンベヤを形成する1つのスラットコンベヤと該スラットコンベヤと隣接する搬送速度の速いスラットコンベヤとの速度差及び前記傾斜角度αは、前記容器が速度差コンベヤを形成する1つのスラットコンベヤ上から隣接する搬送速度の速いスラットコンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定する。
容器10が缶のようにコンベヤとの相対摩擦係数が低く容器搬送上安定している容器である場合には、例えば速度0のコンベヤから隣接する速度100m/minという非常に高速のコンベヤに移動する際にも、その極端な速度差を容器はガイドに沿いながら自転することでエネルギーを開放しながら徐々に高速側のコンベヤの速度に加速していく。従って、容器の移動に従って順次搬送速度を増すようにすると、その速度差の大きさが原因によって容器が転倒しにくい。
【0020】
上記構成のコンバイナの作用について説明する。
容器10が入口コンベヤ51の水平部分に載って移動しているときには、等速運動なので、図2(a)に示すように、容器に掛かる外力は重心に掛かる下向きの重力Wとコンベヤ51から上向きに掛かる垂直力の反力Wのみで、互いに打消して合力は0となり、搬送方向の摩擦力(反力)は発生しない。
【0021】
容器10が入口コンベヤ51の傾斜部に進むと、図2(b)に示すように、重力Wはコンベヤ51の搬送方向を向く分力Wsinαと、直角下方に向く分力Wcosαの2つの分力を持つ力として働き、コンベヤ51からこれらに対する反力として反搬送方向に向く摩擦反力Wsinαと搬送方向に直角上方に向く直角反力Wcosαを受けて合力は0となる。この摩擦反力Wsinαは容器10の底部が摩擦力の方向に回転する回転モーメントを生じるが、コンベヤ51は直角反力Wcosαの作用線の位置を容器10の底面の範囲内で移動させて抵抗モーメントを発生して回転モーメントを打消して容器10は回転せずに静止している。
なお、角度αは角度β=arctan(d/2h)より小さいものとする。(hは重心Wの高さ、dは容器10の直径)
【0022】
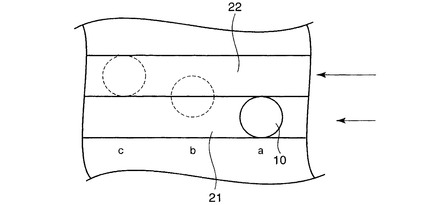
容器10がある搬送速度のコンベヤ21から隣接する搬送速度の大きいコンベヤ22に移動する時には、図4に示すように、容器10は容器全体がコンベヤ21上に位置する状態aから、容器の一部がコンベヤ21上であり残りの一部がコンベヤ22上に位置する状態bを経て、容器全体がコンベヤ22上に位置する状態cへと移動していく。状態aから状態cへの移動の過程で容器10にはたらく力は以下のように変化する。
【0023】
容器10がある搬送速度のコンベヤ(以下低速コンベヤと呼ぶ)から隣の搬送速度の大きいコンベヤ(以下高速コンベヤと呼ぶ)に乗移る時には、容器10はその底面に高速コンベヤから搬送方向に向く摩擦力を、低速コンベヤからはこれを打消す逆向きの摩擦力を受け、容器10の乗移りが進むに連れて逆向きの摩擦力は消滅し、搬送方向に向く摩擦力は増大して最大値のWcosαtanθに達する。最終の運動のみに着目すると、図2(c)に示すように、この最大摩擦力Wcosαtanθと重力の搬送方向の分力Wsinαとの合力が容器10を高速コンベヤの搬送速度まで加速する搬送方向の力(N)として作用する。この合力のうち搬送方向の分力Wsinαは質量力であって容器10の重心を通るので容器10の回転には関らず、容器10の底面に掛かる最大摩擦力Wcosαtanθのみが容器の底部を搬送方向に回転させるモーメントを発生する。コンベヤの直角反力Wcosαは着力点を移動させてこれを打消すが、不足する場合には容器10は転倒することになる。
【0024】
図3は、摩擦係数tanθを0.2(θ=11.3°)、容器にはたらく重力Wを3.43N(容器重量0.35kg)としたときの、傾斜角α(0〜11.3°)に対する容器10を加速する加速力(搬送力)の大きさの関係を示してある。
【0025】
以上述べたように、容器10が高速コンベヤの方に方向を変えて移動したり、高速の搬送速度に増速したりする加速運動をする場合には、コンベヤから最大値の摩擦力Wcosαtanθを受け、この摩擦力は容器10を底部が摩擦力の方向に回る回転モーメントを生じて転倒の原因となるので、本発明のコンバイナのコンベヤの摩擦角θ(摩擦係数tanθ)は極力小さいものとする。この摩擦角θの低減は複数の容器10が主ガイドと副ガイドの間に詰まるブリッジ現象を防止するのにも役立つ。容器10を高速コンベヤの搬送速度まで増速する力として、コンベヤから受ける搬送方向に向いた最大値摩擦力(表面力)と、コンベヤを傾斜させて生ずる同方向を向く重力の搬送方向の分力(質量力)とを用いる。この分力は容器10を回転させるモーメントを伴わない利点がある。この容器10の搬送力は、図3に示すようにコンベヤの傾斜角αをコンベヤの摩擦角θに近づければ最大摩擦力の2倍近くとすることが出来、容器10を高速コンベヤの搬送速度まで加速する時間と距離を短縮することができ、コンバイナの機長の短縮に寄与することができる。
【産業上の利用可能性】
【0026】
容器の搬送能力が大きく、設置スペースの小さい容器の整列装置として利用することができる。
【図面の簡単な説明】
【0027】
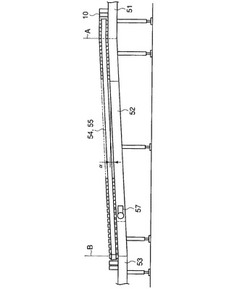
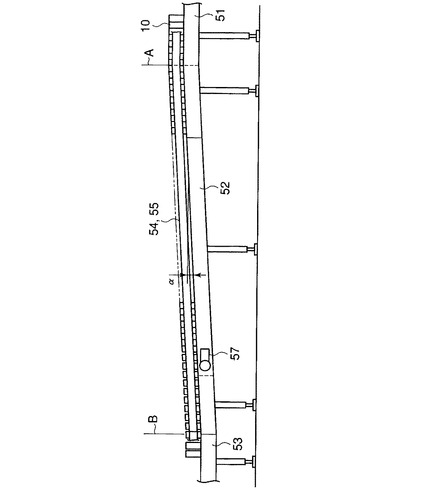
【図1】本発明の実施の形態に係るコンバイナの正面図である。
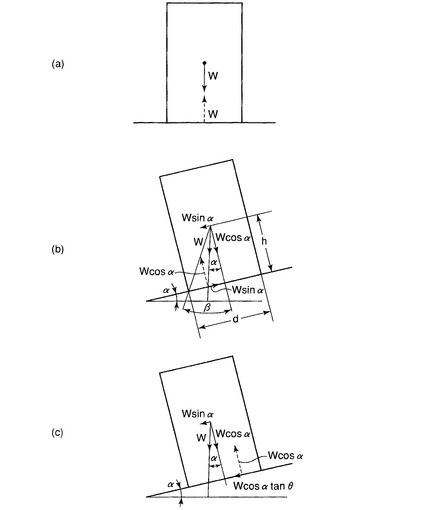
【図2】容器に作用する外力と反力の関係を示す説明図である。
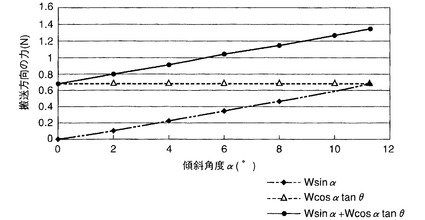
【図3】容器を加速する搬送方向の力とコンベヤの傾斜角の関係を示すダイヤグラムである。
【図4】容器が1つのコンベヤから隣接する搬送速度の速いコンベヤに移動する状態を示す部分平面図である。
【図5】従来のコンバイナの平面図である。本図は図1の平面図としても流用する。
【図6】図5のII矢視図である。
【符号の説明】
【0028】
10 容器
51 入口コンベヤ
52 速度差コンベヤ
53 出口コンベヤ
54 主ガイド
55 副ガイド
57 駆動モータ
α 角度(傾斜角度)
θ 摩擦角
【技術分野】
【0001】
本発明は、上流の入口コンベヤ上に横方向に隣接し直立して供給される瓶や缶等の複数列の容器を下流の出口コンベヤから1列に整列させて排出するコンバイナ及びコンバイナによる容器の搬送方法に関する。
【背景技術】
【0002】
コンバイナは、特許文献2に開示されているように、充填装置や、ラベラ装置や、検査装置などの壜や缶などの縦長の容器を扱う装置の上流に設置し、上流側から複数列のコンベヤによって前後左右を互いに接触しながら供給される容器を、間隔をあけて1列に並べて下流側に送出する搬送装置である。
【0003】
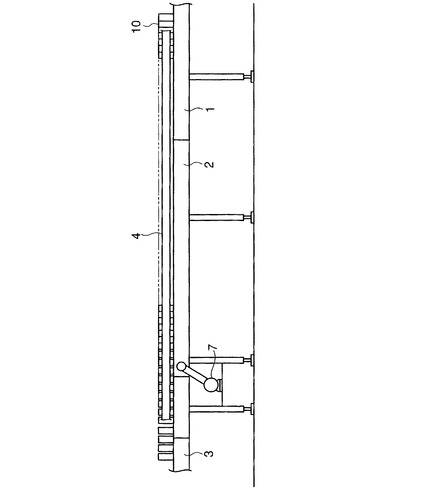
代表的な従来のコンバイナの構成を図5(特許文献1の第4図に相当する)及び図6によって説明する。
図5はその従来のコンバイナの平面図、図6は図5におけるII矢視図である。
両図において、1は駆動モータ6で駆動され、搬送速度が同じ複数列(図では4列)のスラットチェンコンベヤ(以下単にコンベヤと呼ぶ)で成る入口コンベヤ、2は駆動モータ7で駆動され、搬送速度がそれぞれ異なる複数列(図では6列)のコンベヤで成る速度差コンベヤ、また、3は駆動モータ8で駆動される1列のコンベヤの出口コンベヤである。これらのコンベヤは図6に示すように何れも水平に設置されている。
速度差コンベヤ2は入口コンベヤ1の隣に、出口コンベヤ3は速度差コンベヤ2の隣に、それぞれの一部を相手のコンベヤと搬送方向に併走させている。
速度差コンベヤ2の各列の速度は、スプロケットトレイン9によって増速され、入口コンベヤ1から出口コンベヤ3の方向に順次大きくなっていて、入口コンベヤ1の速度より大きく、出口コンベヤ3より小さくなっている。図5の右側に示す矢印は、コンベヤ速度の大きさを示している。
4及び5は、それぞれコンベヤの上側の適宜の高さで、容器の搬送方向の両側に設けられた主ガイド及び副ガイドで、両者は入口コンベヤ1の上流側及び出口コンベヤ3の下流側では搬送方向に平行に、その間では搬送方向に斜交していて両者の間隔は下流側が狭くなっている。10は容器で、図は缶の場合を示している。
【0004】
上記構成の従来のコンバイナの作用を説明する。
入口コンベヤ1から前後及び左右を互いに接触させて複数列で供給された容器10は、下流側に進んで鋭角で主ガイド4に当接し、主ガイド4の側面から受ける反力によって速度差コンベヤ2の方向に移動し、更に搬送速度の大きいコンベヤの方向に移動して速度を増す。このように速度を増した容器10は互いの間隔を広げて出口コンベヤ3では1列となって下流側に送出される。なお、副ガイド5は容器10が反対側に自由に広がるのを規制して、流れに淀みができたり容器10が転倒するのを防いでいる。
【0005】
【特許文献1】特開平3−143823号公報(第4図)
【特許文献2】特開昭62−42805号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0006】
コンバイナの下流に配設される充填装置や、ラベラ装置や、検査装置の能力向上に伴い、コンバイナもこれに対応して能力の向上が必要となっており、容器の搬送能力が大きく、機長が短く設置スペースの小さい装置の提供が望まれている。
しかし、上述の従来のコンバイナでは、搬送速度を大きくすると、容器がガイドと当接するときに受ける衝撃力によって、また搬送速度の大きいコンベヤに乗移るときにコンベヤから受ける摩擦力によって容器が転倒し易く、あるいは主ガイドと副ガイドの間に容器がブリッジ状に詰まり(ジャミング)を生じて運転を妨げるという問題がある。
本発明は容器の転倒やジャミングを防止すると共に、容器が隣の大きな搬送速度のコンベヤに移ったときの容器の加速力を増して、上述の問題点を解決したコンバイナ及びコンバイナによる容器の搬送方法の提供を目的としている。
【課題を解決するための手段】
【0007】
上記問題点に対し、本発明は以下の各手段により課題の解決を図る。
(1)第1の手段のコンバイナは、同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させたことを特徴とする。
【0008】
前記コンバイナを形成する3つのコンベヤを、速度差コンベヤの上流側端から下流側端までの範囲で搬送方向上流側から下流側へ向けて下向き傾斜させることにより、傾斜によって生ずる容器にはたらく重力の搬送方向への分力と、コンベアから受ける摩擦力によって、容器を移送先のコンベアの搬送速度まで加速させることが可能となる。
【0009】
(2)搬送する容器の直径をd、容器の重心の高さをhとしたとき、前記3つのコンベヤの傾斜角度αを
α<arctan(d/2h)
の範囲で傾斜させることを特徴とする。
【0010】
傾斜角度αをα<arctan(d/h)の範囲とすることで、容器の重心位置が、コンベアとの接触面であり搬送方向先端位置よりも搬送方向上流側に位置するようになるため、容器が搬送方向側に転倒しなくなる。
【0011】
(3)前記入口コンベヤと前記速度差コンベヤ中の最低搬送速度のコンベヤとの速度差及び前記傾斜角度αを、前記容器が入口コンベヤ上から速度差コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする。
このことにより、容器が入口コンベヤから速度差コンベヤに移動した際に、容器の転倒を防止しつつ移動先の速度差コンベアの搬送速度まで加速させることが可能となる。
【0012】
(4)前記速度差コンベヤ中の最高搬送速度のコンベヤと前記出口コンベヤとの速度差及び前記傾斜角度αを、前記容器が速度差コンベヤ上から出口コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする。
このことにより、容器が速度差コンベヤから出口コンベヤに移動した際に、容器の転倒を防止しつつ移動先の出口コンベヤの搬送速度まで加速させることが可能となる。
【0013】
(5)第5の手段のコンバイナによる容器の搬送方法は、順次搬送速度が大きくなる複数列のコンベヤを隣接させ、該コンベヤ上に載置されて走行する容器をガイドによって順次速度の大きいコンベヤに移送させて増速させ、複数列で受け入れた容器を1列に整列させて排出するコンバイナによる容器の搬送方法において、水平方向に対して搬送方向に前下りにコンベヤの摩擦角より小さい傾斜角度で傾斜させ、傾斜によって生ずる容器にはたらく重力の搬送方向への分力とコンベヤから受ける摩擦力とによって、容器を移送先のコンベヤの搬送速度まで加速することを特徴とする。
【発明の効果】
【0014】
以上記載のごとく本発明によれば、コンバイナの流れ方向への前下がりの傾斜をつけることにより、コンベア自体の高摩擦係数化に伴う容器の転倒やジャミングといったリスクを増大させることなく、同傾斜によって生ずる容器にはたらく重力の搬送方向への分力と、コンベアから受ける摩擦力によって、容器を移送先のコンベアの搬送速度まで加速させることが可能となり、従来と同等の機長で、高速化、高能力化を実現できるとともに、従来と同等の能力をコンバイナの機長を短縮したもので達成可能となり、省スペース化を図ることができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【実施例1】
【0016】
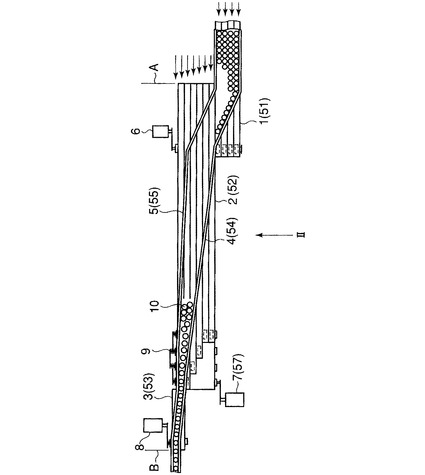
本発明のコンバイナの実施の形態を図1〜図5によって説明する。図1はコンバイナの正面図、図2は容器に作用する外力と反力の関係を示す説明図、図3は容器を加速する搬送方向の力と、コンベアの傾斜角の関係を示すダイヤグラム、図4は容器が1つのコンベヤから隣接する搬送速度の速いコンベヤに移動する状態を示す部分平面図である。この実施の形態のコンバイナは前述の従来例と同様の構成であり、平面図は従来例の図5とほぼ同様なので、図5を流用することとし、本実施の形態を表す場合は従来例の番号に50を加えて表すこととする。
【0017】
このコンバイナは、複数列の同じ搬送速度のコンベヤ(スラットチエンコンベヤ)で成る入口コンベヤ51と、この入口コンベヤ51に隣接して一部が併走する順次に搬送速度を増す複数列のコンベヤで成る速度差コンベヤ52と、この速度差コンベヤ52に隣接し一部が併走する搬送速度が最大の1列のコンベヤの出口コンベヤ53と、これらのコンベヤの上部を斜めに走り、下流側が狭くなる主ガイド54及び副ガイド55で構成されたコンバイナであって、速度差コンベヤ52の上流側端Aから下流側端Bまでの間にあるこれらの3つのコンベヤを、水平面に対して下流側が下がる摩擦角θより小さい角度αの勾配をつける。従って入口コンベヤ51の下流側の一部、及び出口コンベヤ53の上流側の一部の併走部分も傾斜することになる。
また、入口コンベヤ51、速度差コンベヤ52、及び出口コンベヤ53の容器10に対する摩擦角θは極力小さくする。なお、図1に示す速度差コンベヤ52の駆動モータ57は直交軸型駆動モータをコンベヤフレームに取付けた場合を示してあり、その他の駆動モータや変速用のスプロケットトレイン等は図示を省略してある。
【0018】
ここで、前記入口コンベヤ51を形成する各コンベアの搬送速度をv51、前記速度差コンベヤ52を形成するコンベヤの搬送速度を前記入口コンベヤと隣接するコンベヤから順にv521、v522、v523、v524、v525、v526、前記出口コンベヤの搬送速度をv53とすると、
v51<v521<v522<v523<v524<v525<v526<v53
が成立する。
なお、各コンベアの搬送速度の関係は、これに限定するものではないが、後述する理由により、本実施例のように容器10の移動に従って順次搬送速度を増すようにするとよい。
【0019】
また、前記速度差コンベヤを形成する1つのスラットコンベヤと該スラットコンベヤと隣接する搬送速度の速いスラットコンベヤとの速度差及び前記傾斜角度αは、前記容器が速度差コンベヤを形成する1つのスラットコンベヤ上から隣接する搬送速度の速いスラットコンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定する。
容器10が缶のようにコンベヤとの相対摩擦係数が低く容器搬送上安定している容器である場合には、例えば速度0のコンベヤから隣接する速度100m/minという非常に高速のコンベヤに移動する際にも、その極端な速度差を容器はガイドに沿いながら自転することでエネルギーを開放しながら徐々に高速側のコンベヤの速度に加速していく。従って、容器の移動に従って順次搬送速度を増すようにすると、その速度差の大きさが原因によって容器が転倒しにくい。
【0020】
上記構成のコンバイナの作用について説明する。
容器10が入口コンベヤ51の水平部分に載って移動しているときには、等速運動なので、図2(a)に示すように、容器に掛かる外力は重心に掛かる下向きの重力Wとコンベヤ51から上向きに掛かる垂直力の反力Wのみで、互いに打消して合力は0となり、搬送方向の摩擦力(反力)は発生しない。
【0021】
容器10が入口コンベヤ51の傾斜部に進むと、図2(b)に示すように、重力Wはコンベヤ51の搬送方向を向く分力Wsinαと、直角下方に向く分力Wcosαの2つの分力を持つ力として働き、コンベヤ51からこれらに対する反力として反搬送方向に向く摩擦反力Wsinαと搬送方向に直角上方に向く直角反力Wcosαを受けて合力は0となる。この摩擦反力Wsinαは容器10の底部が摩擦力の方向に回転する回転モーメントを生じるが、コンベヤ51は直角反力Wcosαの作用線の位置を容器10の底面の範囲内で移動させて抵抗モーメントを発生して回転モーメントを打消して容器10は回転せずに静止している。
なお、角度αは角度β=arctan(d/2h)より小さいものとする。(hは重心Wの高さ、dは容器10の直径)
【0022】
容器10がある搬送速度のコンベヤ21から隣接する搬送速度の大きいコンベヤ22に移動する時には、図4に示すように、容器10は容器全体がコンベヤ21上に位置する状態aから、容器の一部がコンベヤ21上であり残りの一部がコンベヤ22上に位置する状態bを経て、容器全体がコンベヤ22上に位置する状態cへと移動していく。状態aから状態cへの移動の過程で容器10にはたらく力は以下のように変化する。
【0023】
容器10がある搬送速度のコンベヤ(以下低速コンベヤと呼ぶ)から隣の搬送速度の大きいコンベヤ(以下高速コンベヤと呼ぶ)に乗移る時には、容器10はその底面に高速コンベヤから搬送方向に向く摩擦力を、低速コンベヤからはこれを打消す逆向きの摩擦力を受け、容器10の乗移りが進むに連れて逆向きの摩擦力は消滅し、搬送方向に向く摩擦力は増大して最大値のWcosαtanθに達する。最終の運動のみに着目すると、図2(c)に示すように、この最大摩擦力Wcosαtanθと重力の搬送方向の分力Wsinαとの合力が容器10を高速コンベヤの搬送速度まで加速する搬送方向の力(N)として作用する。この合力のうち搬送方向の分力Wsinαは質量力であって容器10の重心を通るので容器10の回転には関らず、容器10の底面に掛かる最大摩擦力Wcosαtanθのみが容器の底部を搬送方向に回転させるモーメントを発生する。コンベヤの直角反力Wcosαは着力点を移動させてこれを打消すが、不足する場合には容器10は転倒することになる。
【0024】
図3は、摩擦係数tanθを0.2(θ=11.3°)、容器にはたらく重力Wを3.43N(容器重量0.35kg)としたときの、傾斜角α(0〜11.3°)に対する容器10を加速する加速力(搬送力)の大きさの関係を示してある。
【0025】
以上述べたように、容器10が高速コンベヤの方に方向を変えて移動したり、高速の搬送速度に増速したりする加速運動をする場合には、コンベヤから最大値の摩擦力Wcosαtanθを受け、この摩擦力は容器10を底部が摩擦力の方向に回る回転モーメントを生じて転倒の原因となるので、本発明のコンバイナのコンベヤの摩擦角θ(摩擦係数tanθ)は極力小さいものとする。この摩擦角θの低減は複数の容器10が主ガイドと副ガイドの間に詰まるブリッジ現象を防止するのにも役立つ。容器10を高速コンベヤの搬送速度まで増速する力として、コンベヤから受ける搬送方向に向いた最大値摩擦力(表面力)と、コンベヤを傾斜させて生ずる同方向を向く重力の搬送方向の分力(質量力)とを用いる。この分力は容器10を回転させるモーメントを伴わない利点がある。この容器10の搬送力は、図3に示すようにコンベヤの傾斜角αをコンベヤの摩擦角θに近づければ最大摩擦力の2倍近くとすることが出来、容器10を高速コンベヤの搬送速度まで加速する時間と距離を短縮することができ、コンバイナの機長の短縮に寄与することができる。
【産業上の利用可能性】
【0026】
容器の搬送能力が大きく、設置スペースの小さい容器の整列装置として利用することができる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の形態に係るコンバイナの正面図である。
【図2】容器に作用する外力と反力の関係を示す説明図である。
【図3】容器を加速する搬送方向の力とコンベヤの傾斜角の関係を示すダイヤグラムである。
【図4】容器が1つのコンベヤから隣接する搬送速度の速いコンベヤに移動する状態を示す部分平面図である。
【図5】従来のコンバイナの平面図である。本図は図1の平面図としても流用する。
【図6】図5のII矢視図である。
【符号の説明】
【0028】
10 容器
51 入口コンベヤ
52 速度差コンベヤ
53 出口コンベヤ
54 主ガイド
55 副ガイド
57 駆動モータ
α 角度(傾斜角度)
θ 摩擦角
【特許請求の範囲】
【請求項1】
同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させたことを特徴とするコンバイナ。
【請求項2】
搬送する容器の直径をd、容器の重心の高さをhとしたとき、前記3つのコンベヤの傾斜角度αを
α<arctan(d/2h)
の範囲で傾斜させることを特徴とする請求項1記載のコンバイナ。
【請求項3】
前記入口コンベヤと前記速度差コンベヤ中の最低搬送速度のスラットコンベヤとの速度差及び前記傾斜角度αを、前記容器が入口コンベヤ上から速度差コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする請求項1記載のコンバイナ。
【請求項4】
前記速度差コンベヤ中の最高搬送速度のコンベヤと前記出口コンベヤとの速度差及び前記傾斜角度αを、前記容器が速度差コンベヤ上から出口コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする請求項1記載のコンバイナ。
【請求項5】
順次搬送速度が大きくなる複数列のコンベヤを隣接させ、該コンベヤ上に載置されて走行する容器をガイドによって順次速度の大きいコンベヤに移送させて増速させ、複数列で受け入れた容器を1列に整列させて排出するコンバイナによる容器の搬送方法において、水平方向に対して搬送方向に前下りにコンベヤの摩擦角より小さい傾斜角度で傾斜させ、傾斜によって生ずる容器にはたらく重力の搬送方向への分力とコンベヤから受ける摩擦力とによって、容器を移送先のコンベヤの搬送速度まで加速することを特徴とするコンバイナによる容器の搬送方法。
【請求項1】
同じ搬送速度の複数列のスラットコンベヤで成る入口コンベヤと、この入口コンベヤに一部が併走するように隣接する順次搬送速度が大きくなる複数列のスラットコンベヤで成る速度差コンベヤと、この速度差コンベヤに一部が併走するように隣接する搬送速度が速度差コンベヤより大きい1列のスラットコンベヤで成る出口コンベヤと、これらのコンベヤの上側に配設され搬送方向に斜めに走り入口コンベヤの巾から出口コンベヤの巾に狭まる2本のガイドとより構成されるコンバイナであって、速度差コンベヤの上流側端から下流側端までの範囲の前記3つのコンベヤの傾斜角度を、水平面に対して前下がりにコンベヤの摩擦角より小さい角度で傾斜させたことを特徴とするコンバイナ。
【請求項2】
搬送する容器の直径をd、容器の重心の高さをhとしたとき、前記3つのコンベヤの傾斜角度αを
α<arctan(d/2h)
の範囲で傾斜させることを特徴とする請求項1記載のコンバイナ。
【請求項3】
前記入口コンベヤと前記速度差コンベヤ中の最低搬送速度のスラットコンベヤとの速度差及び前記傾斜角度αを、前記容器が入口コンベヤ上から速度差コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする請求項1記載のコンバイナ。
【請求項4】
前記速度差コンベヤ中の最高搬送速度のコンベヤと前記出口コンベヤとの速度差及び前記傾斜角度αを、前記容器が速度差コンベヤ上から出口コンベヤ上に移動する際に搬送上流側に転倒しない組み合わせに設定することを特徴とする請求項1記載のコンバイナ。
【請求項5】
順次搬送速度が大きくなる複数列のコンベヤを隣接させ、該コンベヤ上に載置されて走行する容器をガイドによって順次速度の大きいコンベヤに移送させて増速させ、複数列で受け入れた容器を1列に整列させて排出するコンバイナによる容器の搬送方法において、水平方向に対して搬送方向に前下りにコンベヤの摩擦角より小さい傾斜角度で傾斜させ、傾斜によって生ずる容器にはたらく重力の搬送方向への分力とコンベヤから受ける摩擦力とによって、容器を移送先のコンベヤの搬送速度まで加速することを特徴とするコンバイナによる容器の搬送方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−83968(P2009−83968A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−253834(P2007−253834)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
[ Back to top ]