
コンバインの刈り取り部の分草装置
【課題】コンバインの現在機は倒伏刈り時の倒伏桿の梳くい上げ性能が悪く、倒伏桿の梳くい残しが出る、そのために速度が充分に上げられない、更に梳くい上げ性能が悪いので、引き起こし部と搬送部に倒伏桿が詰まる、詰まるとメンテナンス性が悪く機体の掃除に多くの時間を要する。
【解決手段】引き起こし部のタイン爪を回動軸心を中心として該支持伝動ケース回りに角度調節固定自在に係支せしめる構造。
【解決手段】引き起こし部のタイン爪を回動軸心を中心として該支持伝動ケース回りに角度調節固定自在に係支せしめる構造。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンバインの刈り取り部に設けられる引き起こし装置の性能向上と構造の単純化、更に引き起こし装置部のメンテナンス向上と後方に位置する刈り取り搬送部のメンテナンス向上を図るコンバインの刈り取り部の分草装置に関するものである。
【背景技術】
【0002】
コンバインの刈り取り部に設けられる引き起こしの従来構造は、刈り取り部の前面側に位置する横方向のタイン爪横回し駆動型強制引き起こし装置と、該タイン爪横回し駆動型強制引き起こし装置の側方に位置する、縦方向のタイン爪縦回し駆動型強制分草装置で構成されている形態が見られる。通常は刈り取り対象の稲が田面に立ち姿勢の時は横回し駆動型強制引き起こし装置だけで使用される作業形態が多い。しかしながら、稲が田面に倒れた平伏姿勢の時は駆動型強制引き起こし装置の横回しタイン爪だけの作業時では田面に倒れている稲をタイン爪で全部梳くい上げる事が出来ないので梳くい漏れが出る傾向がある。そのために、田面に倒伏している全ての倒伏稲を梳くい上げようとして横回しタイン爪の回転下死点R部の先端速度を現状では約3m/sにも高速回動させている。それでもまだ梳くい漏れが出るのでコンバインの前進速度を低速にせざるを得なく充分な刈り取り速度が出ないこととなり作業効率が低下している。
【0003】
一方では例え、倒伏稲を刈り取り時に引き起こし装置で梳くい上げる事が出来たとしても水平タイン爪(引き起こし爪)構造でタイン爪の回転下死点R部の先端回動梳き上げ速度は約3m/s、直進部の梳き上げ速度で約0,7m/s、刈り取り稲桿が刈り取り部の刈り刃部に到着前の瞬間はまだ稲桿は田面の土に固着されている。そのために稲桿は土とタイン爪との間でかなりの引っ張り作用が起きている結果、稲桿は高速に回動する3m/sの梳き上げ速度には耐え切れないことになり、稲桿が切れたり、抜けたりする現象を誘発して稲桿は損傷が沢山出る状態を余儀なくされ、結果的にせり上がりが出る原因となる。稲桿のせり上がりを如何に少なくするかが重要な解決課題である。
【0004】
倒伏稲は特に稲桿が軟弱であり桿の抜けや切れが発生し易い。稲桿の抜けや切れが発生すると引き起こし装置の前に溜まりタイン爪の梳き上げ作用に過大な抵抗を付与することになり、その結果運転不能になる傾向が見られる。又切れた稲桿が引き起こし装置の後方の搬送部に送られると搬送部で詰まりが発生することがありその為に運転不能になることもある。運転不能になった時に稲桿切れ屑の詰まりを排除して元通りにするための時間が掛かるし、元通りにするための作業が非常にやりにくい。倒伏稲をコンバインで刈り取り作業する時にはこの様な現象が起こり易いことから、コンバイン作業運転の不慣れな人には充分使いこなせない問題がある。
【0005】
前記のタイン爪横回し駆動型強制引き起こし装置とタイン爪縦回し駆動型強制分草装置で構成されている縦横の2重タイン爪構造のものは、タイン爪の数が多くなりタイン爪によって稲籾が引っ掻き落とされて脱粒する所謂ヘッドロス現象を多く発生させる結果となる。脱粒性容易な性質を有するインデカ系の稲ではヘッドロスが非常に多く発生するので問題である。
更に縦横の2重タイン爪構造が複雑であり、又切られた桿が引き起こし装置の裏側に詰まると、詰まりを排除する掃除が出来ない。そこで、本発明においては構造が簡単にできる1重タイン爪構造であっても、前記の2重タイン爪構造より性能向上させた刈り取り機械を提供せんとするものである。
コンバインのユーザーである農協や農業法人、農家からはコンバインの性能を向上させてコストを低減させる要求が強く求められており、本発明はこれらの問題や要求に対して解決する必要がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実公平4−3533号公報
【特許文献2】実公昭50−3446号公報
【特許文献3】実公昭55−93233号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記のように、コンバインは通常の刈り取り作業はタイン爪横回し駆動型強制引き起こし装置だけで作業をしている、本案はタイン爪横回し駆動型強制引き起こし装置だけで倒伏稲であっても損傷なく完全に刈り取る事を目的とするものであり、コンバインの引き起こし装置と刈り取り部は倒伏した稲桿をタイン爪で梳くい上げながら稲桿下部を刈り取り切断して走行部は前進している。その瞬時に1株20〜25本の倒伏稲を完全に梳くい上げる事が現行機では出来ていない、機体の横方向に倒れた稲でも完全に梳くい上げる必要がある。稲もタイン爪も同方向であり、刈り取り速度は約0,6m/s程度で、この速度で刈り取りをする為に、現構造はタイン爪の回転下死点R部の先端速度は約3m/s、直進部で約0,7m/s、にしている、タイン爪の桿に接する速度を下げると、桿の損傷が減少する、更に100%梳くい上げる為にタイン爪に角度を持たせる構造にする。桿の梳くい上げが良くなればタイン爪の速度を下げる事が出来る。
【0008】
機体の横方向に倒れた稲でも、倒伏した桿は揃って同方向ではなく、倒れ角はあらゆる方向に倒れている、それ等を0,6m/sという速度でしかも瞬時に梳くい上げることが求められる、あらゆる方向に倒れている桿を100%梳くい上げる為に、タイン爪の現状の機械は引き起こしケ−スに平行で、しかも角度は固定である。
本発明はタイン爪に角度変更が出来る構造にして、一定の角度だけでは梳くい上げる事が出来ないので、速度が高くても、桿の倒伏角が広くばらついていても梳くい上げ可能なタイン爪が必要、広い性能の要求に応える機能を持つのが本発明である。
【0009】
倒伏稲は特に軟弱で桿の抜けや切れが発生し易い、その様な桿をタイン爪で引き起こす時、従来の機械はタイン爪が引き起こしケ−スに平行に構成されているので、タイン爪が倒伏桿を引き起こす時、タイン爪は倒伏桿の真上にも、株と株の間にも通過する、タイン爪が倒伏桿の真上に来ると、倒伏桿を叩く現象が出る、その時に倒伏桿は切られる、この桿が引き起こしケ−スでせり上がりとなり、引き起こしケ−スの詰まりが発生する、これを解消する必要ある、これを解消することが全体性能UPになる。
【0010】
タイン爪横回し駆動型強制引き起こし装置とタイン爪縦回し駆動型強制分草装置で構成されている縦横の2重タイン爪構造のものは、タイン爪の数が多く
ヘッドロスが多い、ヘッドロスを減少させる方法はタイン爪の回転数を最低限度に下げる事と、タイン爪の減数である。
【0011】
引き起こしケ−ス部に詰まった桿、引き起こしケ−ス部の後方の搬送部に詰まった桿を除去するのに、引き起こしケ−スが開けば引き起こしケ−ス部があった場所に人が立ってワラを引き抜くが出来る、これが本発明である。
【課題を解決するための手段】
【0012】
本発明は、前述の課題解決のために、第一に、多条刈りコンバインの前部に配設される刈り取りフレームに固定されている縦方向の支持伝動ケースに対して、稲桿を引き起こしするタイン爪を上昇回転させる引き起こしケ−スを該伝動ケース回りに角度調節固定自在に止めるようにして、タイン爪をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするものである。
【0013】
これにより、本発明は多条刈りコンバインでも各引き起こしケ−ス全部が回動し、伝動ケース回りの回動軸心を中心としてそれぞれの引き起こしケ−スが角度調節固定自在に回動する。回動角は機体進行の直角方向位置から所望の任意位置に各自由に角度調節が可能で、タイン爪の形当する最大90度まで開く。倒伏刈り時は横姿勢引き起こし位置の0度から斜め姿勢引き起こし位置に相当する30度位いで使用することが可能である。
【0014】
倒伏刈り時において、従来機で刈り取りする時には、タイン爪の形状は桿に柔らかく接当させる為にタイン断面の両端面はR形成に構成されている、その為に引き起こし作用巾はタイン爪の1/2位しか作用しないものが一般的であった。その結果刈り取り速度が速いと桿の引き起こしが充分に出来ない恐れがあった。
本発明の場合は倒伏の状態が悪いと判断される倒伏刈り時において、引き起こしケ−スの引き起こし角度を斜め姿勢引き起こし位置に相当する30度に設定した場合、従来機に比較し、タイン爪の進行方向に対する引き起こし作用範囲が増大するために、引き起こし効果は3倍の作用巾が取れる様に設定が出来る。
【0015】
コンバインで刈り取りに難儀するのは倒伏刈りで、倒伏刈り時に引き起こしケ−ス部に詰まりが発生することがある。詰まりが出るのは色々な要因がある、詰まった時に本発明は引き起こしケ−スが縦姿勢引き起こし位置に相当する機体進行と同方向にまで開く構造で、引きおこしケ−スを回動軸心中心に廻すので、掃除が非常に容易である。
【0016】
インデカ系の稲は脱粒性がジャポニカ係に比較し1/10位低く、握っただけで脱粒する傾向がある。又ジャポニカ系の中でも脱粒強度の強い稲と弱い稲では3倍位の脱粒強度差がある。インデカ系の刈り取りではヘッドロスが全収穫量の3%程度出る場合があるが、ジャポニカ系でも1%程度のヘッドロスが出る時がある。ヘッドロスの出る原因はタイン爪の速度と数に起因し、引き起こしタイン爪の速度を30%程度下げると半減するという測定デ−タ−がある、本発明はタイン爪の作用巾が現状機より3倍あるので梳くい上げ性がよく、タイン爪の速度を30%下げることは可能である。
【0017】
さらに本発明は、第二に、引き起こしケ−スを対向させて左右一対の組に配設し、該左右一対の引き起こしケ−スにセットされたタイン爪の長さは引き起こしケ−スの横姿勢引き起こし位置において、対向する引き起こしケ−ス間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されていることを特徴とするものである。
【0018】
これにより、本発明はタイン爪の長さが重なるように構成されているので、引き起こしケ−スの引き起こし角度を斜め姿勢引き起こし位置の30度進行方向に前進させた状態に引き起こしケ−スをセットすると、両タイン爪の隙間が10mmに保持出来ることとなる。10mmあれば引き起こし桿の漏れはない。
この構成にすると引き起こしケ−ス角度を0度から30度にしてもタイン爪の取り替えの必要はない。
【発明の効果】
【0019】
本発明は機体に平行状態に倒伏している稲を完全に梳くい上げる為に、タイン爪の角度を機体に対して傾斜をさせる。
タイン爪の傾斜により、倒伏稲の梳くい上げ瞬間の喰い込み角度がよくなり、
梳くい上げ効率がよくなる、更に倒伏稲に対しての瞬間梳くい上げ接触時間が3倍に増加する為に拾い残しがゼロになる画期的効果が出る。
【0020】
梳くい上げ効率がよいのでタイン爪速度を30%位下げてもタイン爪による梳くい上げは充分保持出来る、タイン爪が30%も低下すれば、タイン爪による倒伏稲の瞬間梳くい上げ叩きが減少し、瞬間叩き加重も大巾に減少すればタイン爪によるせり上げも減少する、倒伏稲の損傷が50%位は低下する。
ワラ損傷減少により、引き起こし部や引き起こしケ−ス後の搬送トラブルがなくなり、ロス時間の減少で作業能率向上、機械の寿命も長くなる。
【0021】
本発明で引き起こしケ−スが90度開き機体進行と同方向にまで開くので、掃除性が非常によくなり、分解性もよくなる。
【0022】
倒伏性能がよくなるのでタイン爪縦回し駆動型強制分草装置が不要となりコストの低減、更にタイン爪速度が30%位下がればタイン爪によるヘッドロスの大巾な減少となる。
【0023】
本発明は基本構造がタイン爪の長さが重なるように構成されている、この構成により引き起こし角度を30度進行方向に前進させた状態、更に進行方向に平行状態でも使用が可能で、非常に便利である。
【図面の簡単な説明】
【0024】
【図1】従来構造の刈り取り部を示す正面図である。
【図2】従来構造の刈り取り部を示す側面図である。
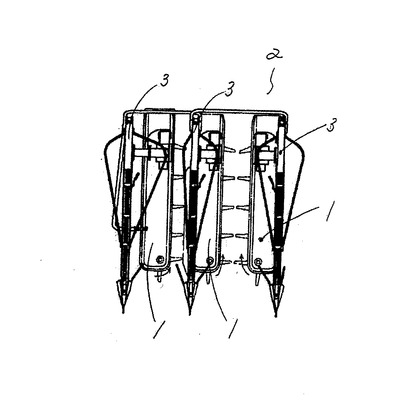
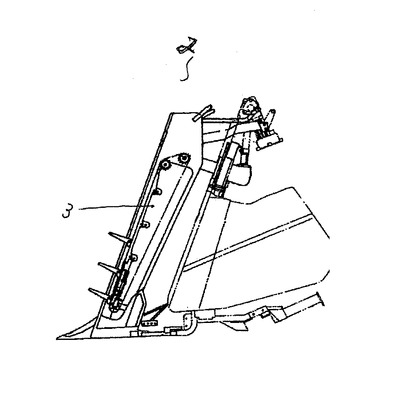
【図3】本発明の刈り取り部を示す側面図である。
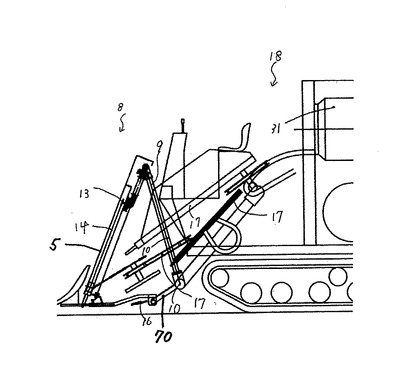
【図4】本発明の刈り取り部の要部を示す側面図である。
【図5】本発明の刈り取り部の引き起こし要部を示す側面図である。
【図6】本発明刈り取り部の引き起こし部上部の取り付けと伝動状態を示す要部側面図である。
【図7】本発明刈り取り部の引き起こし部上部の取り付けと伝動状態を示す要部正面図である。
【図8】本発明刈り取り部の引き起こし部上部の取り付け回動部を示す要部平面図である。
【図9】本発明刈り取り部の引き起こし部上部を分解して全体を示す分解正面図である。
【図10】本発明刈り取り部の引き起こし部上部を分解して示す要部分解正面図である。
【図11】本発明刈り取り部の引き起こし部下部の取り付け回動部を示す要部側面図である。
【図12】本発明刈り取り部の引き起こし部下部の取り付け回動部を示す要部平面図である。
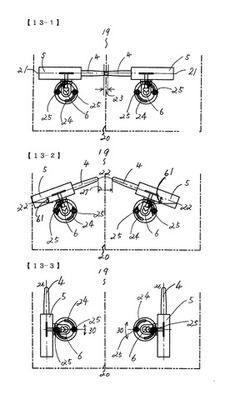
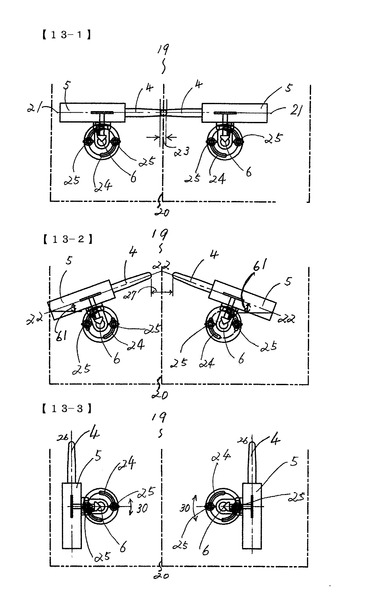
【図13】本発明刈り取り部の引き起こし部の取り付け回動状態を示し、図13−1は平行状態姿勢の要部の作用平面図、図13−2は斜め状態姿勢の要部の作用平面図、図13−3は開放状態姿勢の要部の作用平面図である。
【図14】本発明の作用を示す要部拡大作用図である。
【図15】本発明の作用を示す要部拡大作用図である。
【図16】本発明の作用を示す要部拡大作用図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態を添付した図面に基づいて説明する。
図1と図2は従来構造の刈り取り部を示すものであり、コンバインの刈り取り支持フレ−ム9に設けられた刈り取り部8の従来構造は、前面側に位置する横方向に多数のタイン爪4を有する引き起こしケ−ス5で構成された横方向のタイン爪横回し駆動型強制引き起こし装置1と、該タイン爪横回し駆動型強制引き起こし装置1の側方に位置する、縦方向に多数のタイン爪4を有する引き起こしケ−ス5で構成された縦方向のタイン爪縦回し駆動型強制分草装置3で引き起こし装置2を構成されている形態が見られる。
本発明の構成を説明するにあたって、図1と図2に従来型のコンバインの刈り取り部を例示する。符号1はタイン横回し駆動型強制引き起し装置を左右横方向に多条列配設下した引き起こし装置2であり、3はタイン横回し駆動型強制引き起し装置の側方に付設されているタイン縦回し駆動型強制分草装置である。
図3以降の図面は、本発明の実施態様を示すもので、上記の従来型よりタイン縦回し駆動型強制分草装置3を廃止して、タイン横回し駆動型強制引き起し装置1を平面視で回転移動固定自在に構成されていることを特徴とする。
【0026】
図3以降の図面は、本発明の実施態様を示すもので、上記の従来型よりタイン縦回し駆動型強制分草装置3を廃止して、タイン横回し駆動型強制引き起し装置1を平面視で回転移動固定自在に構成されていることを特徴とする。
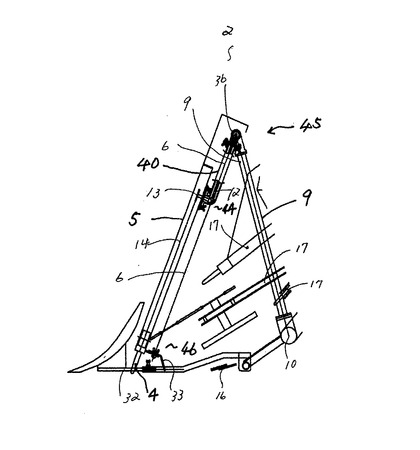
本発明の詳細について説明する。符号18はコンバイン本体18を示しており、前方位置の刈り取り部8において、引き起こし装置2で梳き起こして刈刃16で刈り取った穀桿を搬送部17で中継搬送して後方の脱穀部31に移送供給して脱穀処理するものである。
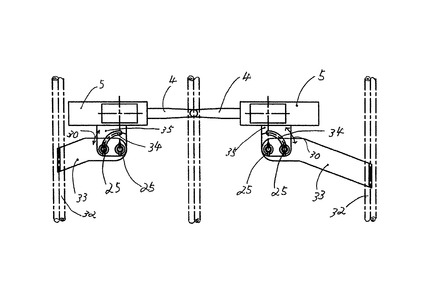
上記刈り取り部8の引き起こし装置2は、上下方向に周回するタイン爪4を配設する引き起こしケ−ス5を有し、引き起こしケ−ス5の下部46はデバイダ−32を延設する刈り取りフレーム70の前部の取り付け支持金具33で支持され、引き起こしケ−ス5の上部45は、刈り取りフレーム70から立設される刈り取り支持フレ−ム9に横梁状の支持伝動ケ−ス36を門型状に連接し、該横梁状の支持伝動ケ−ス36に複数の引き起こし伝動ケ−ス40を垂下させ、この引き起こし伝動ケ−ス40のエルボ下端部44に支持されているものである。
上下方向に周回するタイン爪4は、引き起こし駆動スプロケット13間に懸回される引き起こしチェン14に一定間隙で多数取り付けられており、引き起こし駆動スプロケット13の伝動軸69は、コンバイン本体18からの動力を受ける縦伝動軸10、横伝動軸11、引き起こし伝動軸12を連設して各々の接続端部分をベベルギヤ53、54、65、66、67、68の噛み合い伝動を介して動力接続して駆動されるものである。
図4、図5は刈り取り部8を示す、図3はコンバイン本体18の側面部の1部を示す。
図4、図5においてタイン爪4への動力伝達は、動力源を有するコンバイン本体18から縦伝動軸10に伝導され、縦伝動軸10から横伝動軸11に更に引き起こし伝動軸12に、同軸12から引き起こし駆動スプロケット13に伝導され、引き起こし駆動スプロケット13を介して桿を梳き上げ方向に回動する引き起こしチェン14にタイン爪4が装着されている。引き起こしチェン14の回動機構並びにタイン爪4の出没機構などは従来と同様に構成されているものである。
【0027】
図9に示されるように、引き起こしケ−ス5を対向させて左右一対の組に配設し、該左右一対の引き起こしケ−ス5にセットされたタイン爪4の長さは引き起こしケ−ス5の横姿勢引き起こし位置において、対向する引き起こしケ−ス5間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されているもので、タイン爪4の引き起こし爪の引き上げ回転半径28は引き起こしケ−ス5の前方19から見て通常位置では重覆範囲23となり、倒伏刈りでは左右引き起こし爪間の間隙27となる。タイン爪4は引き起こし移動方向への左右引き起こし爪の上下隙間29があるので衝突はしない。
【0028】
本発明は、多条刈りコンバインの前部に配設される刈り取りフレーム70に固定されている縦方向の支持伝動ケース36に対して、稲桿を引き起こしするタイン爪4を上昇回転させる引き起こしケ−ス5を該支持伝動ケース36回りに角度調節固定自在に止めるようにして、タイン爪4をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪4をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪4をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするコンバインの引き起こし装置にしたものであり、これの詳細を以下に説明する。
【0029】
図9の刈り取り部8の中で引き起こしケ−ス5が5条刈りでは5組ある、5組がそれぞれに回動して全開するとそれぞれが図13−3のような状態になる。
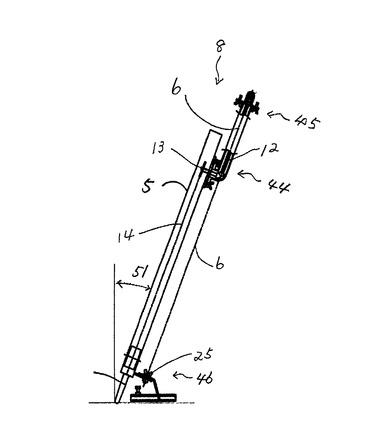
全開の方法は図5の引き起こしケ−ス5の引き起こし伝動ケ−ス40の上部45とエルボ下端部44が回動軸心6を中心にして回動する、回動すると図13−3の状態になる。
引き起こしケ−ス5の下部46もエルボ下端部44、引き起こしケ−ス5の上部45と同時に回動軸心6を中心にして回動すると図3−3の様な状態になる。
【0030】
引き起こしケ−ス5はそれぞれの引き起こしケ−ス5内に引き起こしチェン14とタイン爪4を内装し、タイン爪4は矢印15の方向にそれぞれが回動する、回動することにより立ち稲並びに倒伏稲などがタイン爪4により引き起こされて、梳き上げられた状態で刈刃16により株元が切断され引き起こしケ−ス5の後方にある搬送部17により搬送され脱穀部31に入る。
【0031】
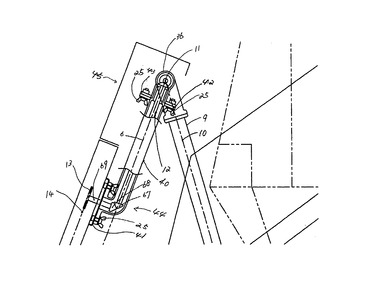
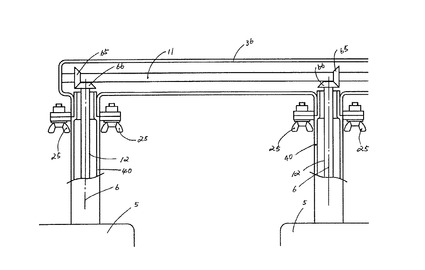
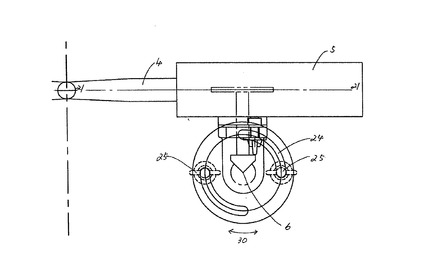
引き起こしケ−ス5の開き方は上部図7、図8、図9、図10の各喋ボルト25を緩め回動軸心6を中心に回動30をさせる。図8で上部の喋ボルト25は引き起こし伝導ケ−ス40に取り付け金具42と43がセットされ、エルボ下端部44は引き起こしケ−ス5に取り付け金具41にて固定される。
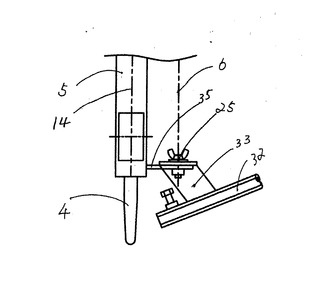
図9と図10で喋ボルト25を緩め、長孔24に沿って回動30させ、引き起こしケ−ス5を上部と同時に回動軸心6を中心に回動30をさせる。喋ボルト25の取り付け関係はデバイダ−32に引き起こしケ−ス下部の取り付け支持金具33を溶接し、取り付け連携金具35は引き起こしケ−ス5に溶接される。
【0032】
刈り取り部8は引き起こし装置2と刈り取り支持フレ−ム9で構成され、引き起こし装置2は引き起こしケ−ス5が5条刈りコンバインでは5セットあり、それぞれに引き起こしチェン14が内装されている。引き起こしチェン14にタイン爪4が複数個セットされている。
コンバイン本体18から縦伝動軸10に、更に横伝動軸11に動力伝達され、横伝動軸11には各ベベルギヤ−65が軸装され、ベベルギヤ−66は引き起こし伝動軸12に各軸装される、動力は引き起こし伝動軸12からベベルギヤ−67に、更にベベルギヤ−68に伝達され、伝動軸69に、伝動軸69に引き起こし駆動スプロケット13が軸装されて、回動し引き起こしチェン14が回転しタイン爪4が回動する。
【0033】
図10の引き起こし装置2の刈り取り支持フレ−ム9は支持伝動ケ−ス36と繋がり、支持伝動ケ−ス36は引き起こし伝動ケ−ス40にも繋がる、引き起こし伝動ケ−ス40は喋ボルト25を緩めると引き起こし伝動ケ−ス40が回動軸心6を中心に回動30する。
引き起こしチェン14,引き起こし駆動スプロケット13への伝動は縦伝動軸10からベベルギヤ−53に、更にベベルギヤ−54に、ベベルギヤ−54から横伝動軸11に、ベベルギヤ−65からベベルギヤ−66に伝達、引き起こし伝動軸12が回動し、ベベルギヤ−67からベベルギヤ−68に伝達、伝動軸69に引き起こし駆動スプロケット13に伝達され引き起こしチェン14が回動してタイン爪4が回動する。
他の引き起こしケ−ス5への回動と伝動は上記の構造と同一方法で、5条あれば同方法で回転される。
【0034】
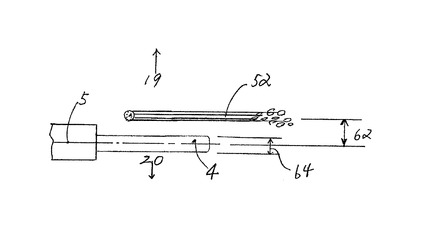
この従来構造の刈り取り部のものは、タイン爪縦回し駆動型強制分草装置3はタイン爪4が倒伏桿52に対し進行方向に交差する構成で、倒伏桿52をタイン爪4が交差する状態から引き起こす、倒伏桿52は軟弱で更に穂先が互いに絡んでいる状態を引き起こすので倒伏桿52が切れ易い。
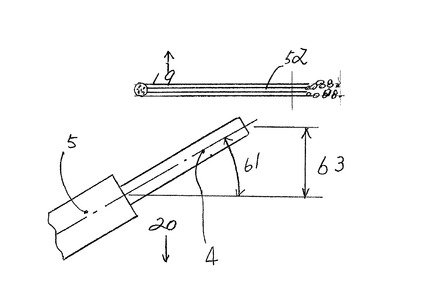
本発明は倒伏桿52に斜め30度からタイン爪4が引き起こすので柔らかく接当する、更に引き起こしケ−ス5は倒れ角51を持っているので、2重に柔らかく引き起こす。
現在機も倒れ角51は持っているが、それ以上に直交による打撃が大。
【0035】
本発明は機体に平行状態に倒伏している稲を完全に梳くい上げる為に、タイン爪4の角度を機体に対して傾斜させる。
タイン爪4の傾斜により、図13−2の様に倒伏桿52に対し斜めから梳くい上げる構造、斜めからタイン爪4が喰い込むので瞬間の喰い込みがよい、倒伏桿52に対して図13−2の様に梳くい上げ距離63の長さは54mmある、現在機のタイン爪巾64は18mmのみ、本発明は倒伏桿52に対し接触時間がタイン爪巾64の18mmに対し3倍の54mmもあるので拾い残しがゼロになる。
コンバインが前方19に進む時に倒伏桿52に対してタイン爪4が梳くい上げる構造になる、図13−2の引き起こし爪の傾斜角61は倒伏桿52の条件を見ながら0度から30度に設定する、引き起こし爪の傾斜角61は適宜選択が出来る。
【0036】
図13−1に示している様に、現在機はコンバイン刈り取り中タイン爪4と倒伏桿52は平行状態にある、倒伏桿52の 1株のコンバイン通過時間は刈り取り速度が0,6m/sで0,067secである、1株に倒伏桿52が25本とすると1本の倒伏桿の梳い上げ時間は0,067secの1/25になる、これでは100%の梳くい上げは困難。
本発明は梳くい上げ時間を3倍にすることにより、タイン爪4の速度を30%下げても梳くい上げ性能は低下せず、寧ろ梳くい上げ性能は大巾に向上する。
タイン爪4の速度が30%位下がればタイン爪4によるヘッドロスの減少、ヘッドロスはインデカ系の稲では非常に大きい問題で、ヘッドロスの減少効果は大である。
【0037】
図13−1は現在機の梳くい上げ時の状態を示すが倒伏桿52とタイン爪4はあくまでも平行。現在機はタイン爪4が倒伏桿52の真上に来た時にタイン爪4で叩く作用が働く、梳くい上げ作用は働かず、籾を叩き落とす。
本発明はタイン爪4の傾斜により、図13−2の様に倒伏桿52に対し斜めから梳くい上げる構造、斜めからタイン爪4が喰い込むので瞬間の喰い込みがよく、タイン爪4による脱粒はない。
【0038】
引き起こしケ−ス5を走行方向に全開構造にすると、刈り取り部8と刈り取り部8後方の掃除性、分解性を良くする。
掃除性、分解性の向上のために、図3−3の様に引き起こしケ−ス5が前方19即ち機体進行方向に向く、搬送部17の前方19に引き起こしケ−ス5がなく、その為に搬送部17に倒伏桿52が詰まっても引き出し易い、引き出す時によく怪我をした、怪我がなくなる。
図3−1は通常の刈り取り時の引き起こしケ−ス5の位置、図3−2は倒伏刈り時の引き起こしケ−ス5の位置を示す、図3−3はメンテナンスの時の引きおこしケ−ス5の位置を示す。
【0039】
現在機の引き起こしタイン爪4の長さは各回動軸心6間の中心よりそれぞれ5mm短く構成されている。本発明は基本構造即ち通常刈りの引き起こしケ−ス5の位置でタイン爪4の長さが重覆範囲23になるように構成されている、図3−2の様に引き起こしケ−ス5の角度を30度進行方向に前進させた状態で引き起こしケ−ス5をセットした場合に両タイン爪の開き27が10mmに保持出来る構造にする。
両タイン爪4の開き27が10mmに設定されるとタイン爪4からの引き起こし作用時に桿の漏れがない。
【0040】
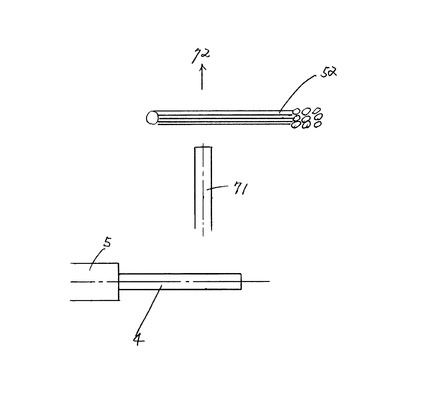
タイン縦回し駆動型強制分草装置3のタイン71の引き起こし作用を図16で説明する、倒伏桿52は通常15cm間隔の株間で耕作されている、倒伏方向は左か右に横倒れしているのが普通、倒伏材を刈り取りする時にコンバインは刈り取り方向72に進行する、タイン71は倒伏桿52を梳くい上げようとする、しかし倒伏桿52の真上にタイン71が来た場合、コンバインの速度が高いので真上から倒伏桿52をタイン71が叩く現象割合が高い、更に1株の梳くい上げる時間が短いので100%梳くい上げる事は出来ない、どうしても残りが発生する。これが問題。
本発明の優れた所は0007に説明をしているが、15cmの株間でもタイン爪4が傾斜角61を持っているために斜めから食い込んでいく時間が長く、その作用で倒伏桿52を真上から叩く割合が非常に低く、梳くい残しがない。
【産業上の利用可能性】
【0041】
中国はインデカ系の稲が多く生産されている、ヘッドロスが少なくなるので輸出が大いに期待出来る。
【符号の説明】
【0042】
1 タイン横回し駆動型強制引き起こし装置
3 タイン縦回し駆動型強制分草装置
4 タイン爪
5 引き起こしケ−ス
6 回動軸心
9 刈り取りフレ−ム
36 支持伝動ケ−ス
40 伝導ケ−ス
【技術分野】
【0001】
本発明は、コンバインの刈り取り部に設けられる引き起こし装置の性能向上と構造の単純化、更に引き起こし装置部のメンテナンス向上と後方に位置する刈り取り搬送部のメンテナンス向上を図るコンバインの刈り取り部の分草装置に関するものである。
【背景技術】
【0002】
コンバインの刈り取り部に設けられる引き起こしの従来構造は、刈り取り部の前面側に位置する横方向のタイン爪横回し駆動型強制引き起こし装置と、該タイン爪横回し駆動型強制引き起こし装置の側方に位置する、縦方向のタイン爪縦回し駆動型強制分草装置で構成されている形態が見られる。通常は刈り取り対象の稲が田面に立ち姿勢の時は横回し駆動型強制引き起こし装置だけで使用される作業形態が多い。しかしながら、稲が田面に倒れた平伏姿勢の時は駆動型強制引き起こし装置の横回しタイン爪だけの作業時では田面に倒れている稲をタイン爪で全部梳くい上げる事が出来ないので梳くい漏れが出る傾向がある。そのために、田面に倒伏している全ての倒伏稲を梳くい上げようとして横回しタイン爪の回転下死点R部の先端速度を現状では約3m/sにも高速回動させている。それでもまだ梳くい漏れが出るのでコンバインの前進速度を低速にせざるを得なく充分な刈り取り速度が出ないこととなり作業効率が低下している。
【0003】
一方では例え、倒伏稲を刈り取り時に引き起こし装置で梳くい上げる事が出来たとしても水平タイン爪(引き起こし爪)構造でタイン爪の回転下死点R部の先端回動梳き上げ速度は約3m/s、直進部の梳き上げ速度で約0,7m/s、刈り取り稲桿が刈り取り部の刈り刃部に到着前の瞬間はまだ稲桿は田面の土に固着されている。そのために稲桿は土とタイン爪との間でかなりの引っ張り作用が起きている結果、稲桿は高速に回動する3m/sの梳き上げ速度には耐え切れないことになり、稲桿が切れたり、抜けたりする現象を誘発して稲桿は損傷が沢山出る状態を余儀なくされ、結果的にせり上がりが出る原因となる。稲桿のせり上がりを如何に少なくするかが重要な解決課題である。
【0004】
倒伏稲は特に稲桿が軟弱であり桿の抜けや切れが発生し易い。稲桿の抜けや切れが発生すると引き起こし装置の前に溜まりタイン爪の梳き上げ作用に過大な抵抗を付与することになり、その結果運転不能になる傾向が見られる。又切れた稲桿が引き起こし装置の後方の搬送部に送られると搬送部で詰まりが発生することがありその為に運転不能になることもある。運転不能になった時に稲桿切れ屑の詰まりを排除して元通りにするための時間が掛かるし、元通りにするための作業が非常にやりにくい。倒伏稲をコンバインで刈り取り作業する時にはこの様な現象が起こり易いことから、コンバイン作業運転の不慣れな人には充分使いこなせない問題がある。
【0005】
前記のタイン爪横回し駆動型強制引き起こし装置とタイン爪縦回し駆動型強制分草装置で構成されている縦横の2重タイン爪構造のものは、タイン爪の数が多くなりタイン爪によって稲籾が引っ掻き落とされて脱粒する所謂ヘッドロス現象を多く発生させる結果となる。脱粒性容易な性質を有するインデカ系の稲ではヘッドロスが非常に多く発生するので問題である。
更に縦横の2重タイン爪構造が複雑であり、又切られた桿が引き起こし装置の裏側に詰まると、詰まりを排除する掃除が出来ない。そこで、本発明においては構造が簡単にできる1重タイン爪構造であっても、前記の2重タイン爪構造より性能向上させた刈り取り機械を提供せんとするものである。
コンバインのユーザーである農協や農業法人、農家からはコンバインの性能を向上させてコストを低減させる要求が強く求められており、本発明はこれらの問題や要求に対して解決する必要がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実公平4−3533号公報
【特許文献2】実公昭50−3446号公報
【特許文献3】実公昭55−93233号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記のように、コンバインは通常の刈り取り作業はタイン爪横回し駆動型強制引き起こし装置だけで作業をしている、本案はタイン爪横回し駆動型強制引き起こし装置だけで倒伏稲であっても損傷なく完全に刈り取る事を目的とするものであり、コンバインの引き起こし装置と刈り取り部は倒伏した稲桿をタイン爪で梳くい上げながら稲桿下部を刈り取り切断して走行部は前進している。その瞬時に1株20〜25本の倒伏稲を完全に梳くい上げる事が現行機では出来ていない、機体の横方向に倒れた稲でも完全に梳くい上げる必要がある。稲もタイン爪も同方向であり、刈り取り速度は約0,6m/s程度で、この速度で刈り取りをする為に、現構造はタイン爪の回転下死点R部の先端速度は約3m/s、直進部で約0,7m/s、にしている、タイン爪の桿に接する速度を下げると、桿の損傷が減少する、更に100%梳くい上げる為にタイン爪に角度を持たせる構造にする。桿の梳くい上げが良くなればタイン爪の速度を下げる事が出来る。
【0008】
機体の横方向に倒れた稲でも、倒伏した桿は揃って同方向ではなく、倒れ角はあらゆる方向に倒れている、それ等を0,6m/sという速度でしかも瞬時に梳くい上げることが求められる、あらゆる方向に倒れている桿を100%梳くい上げる為に、タイン爪の現状の機械は引き起こしケ−スに平行で、しかも角度は固定である。
本発明はタイン爪に角度変更が出来る構造にして、一定の角度だけでは梳くい上げる事が出来ないので、速度が高くても、桿の倒伏角が広くばらついていても梳くい上げ可能なタイン爪が必要、広い性能の要求に応える機能を持つのが本発明である。
【0009】
倒伏稲は特に軟弱で桿の抜けや切れが発生し易い、その様な桿をタイン爪で引き起こす時、従来の機械はタイン爪が引き起こしケ−スに平行に構成されているので、タイン爪が倒伏桿を引き起こす時、タイン爪は倒伏桿の真上にも、株と株の間にも通過する、タイン爪が倒伏桿の真上に来ると、倒伏桿を叩く現象が出る、その時に倒伏桿は切られる、この桿が引き起こしケ−スでせり上がりとなり、引き起こしケ−スの詰まりが発生する、これを解消する必要ある、これを解消することが全体性能UPになる。
【0010】
タイン爪横回し駆動型強制引き起こし装置とタイン爪縦回し駆動型強制分草装置で構成されている縦横の2重タイン爪構造のものは、タイン爪の数が多く
ヘッドロスが多い、ヘッドロスを減少させる方法はタイン爪の回転数を最低限度に下げる事と、タイン爪の減数である。
【0011】
引き起こしケ−ス部に詰まった桿、引き起こしケ−ス部の後方の搬送部に詰まった桿を除去するのに、引き起こしケ−スが開けば引き起こしケ−ス部があった場所に人が立ってワラを引き抜くが出来る、これが本発明である。
【課題を解決するための手段】
【0012】
本発明は、前述の課題解決のために、第一に、多条刈りコンバインの前部に配設される刈り取りフレームに固定されている縦方向の支持伝動ケースに対して、稲桿を引き起こしするタイン爪を上昇回転させる引き起こしケ−スを該伝動ケース回りに角度調節固定自在に止めるようにして、タイン爪をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするものである。
【0013】
これにより、本発明は多条刈りコンバインでも各引き起こしケ−ス全部が回動し、伝動ケース回りの回動軸心を中心としてそれぞれの引き起こしケ−スが角度調節固定自在に回動する。回動角は機体進行の直角方向位置から所望の任意位置に各自由に角度調節が可能で、タイン爪の形当する最大90度まで開く。倒伏刈り時は横姿勢引き起こし位置の0度から斜め姿勢引き起こし位置に相当する30度位いで使用することが可能である。
【0014】
倒伏刈り時において、従来機で刈り取りする時には、タイン爪の形状は桿に柔らかく接当させる為にタイン断面の両端面はR形成に構成されている、その為に引き起こし作用巾はタイン爪の1/2位しか作用しないものが一般的であった。その結果刈り取り速度が速いと桿の引き起こしが充分に出来ない恐れがあった。
本発明の場合は倒伏の状態が悪いと判断される倒伏刈り時において、引き起こしケ−スの引き起こし角度を斜め姿勢引き起こし位置に相当する30度に設定した場合、従来機に比較し、タイン爪の進行方向に対する引き起こし作用範囲が増大するために、引き起こし効果は3倍の作用巾が取れる様に設定が出来る。
【0015】
コンバインで刈り取りに難儀するのは倒伏刈りで、倒伏刈り時に引き起こしケ−ス部に詰まりが発生することがある。詰まりが出るのは色々な要因がある、詰まった時に本発明は引き起こしケ−スが縦姿勢引き起こし位置に相当する機体進行と同方向にまで開く構造で、引きおこしケ−スを回動軸心中心に廻すので、掃除が非常に容易である。
【0016】
インデカ系の稲は脱粒性がジャポニカ係に比較し1/10位低く、握っただけで脱粒する傾向がある。又ジャポニカ系の中でも脱粒強度の強い稲と弱い稲では3倍位の脱粒強度差がある。インデカ系の刈り取りではヘッドロスが全収穫量の3%程度出る場合があるが、ジャポニカ系でも1%程度のヘッドロスが出る時がある。ヘッドロスの出る原因はタイン爪の速度と数に起因し、引き起こしタイン爪の速度を30%程度下げると半減するという測定デ−タ−がある、本発明はタイン爪の作用巾が現状機より3倍あるので梳くい上げ性がよく、タイン爪の速度を30%下げることは可能である。
【0017】
さらに本発明は、第二に、引き起こしケ−スを対向させて左右一対の組に配設し、該左右一対の引き起こしケ−スにセットされたタイン爪の長さは引き起こしケ−スの横姿勢引き起こし位置において、対向する引き起こしケ−ス間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されていることを特徴とするものである。
【0018】
これにより、本発明はタイン爪の長さが重なるように構成されているので、引き起こしケ−スの引き起こし角度を斜め姿勢引き起こし位置の30度進行方向に前進させた状態に引き起こしケ−スをセットすると、両タイン爪の隙間が10mmに保持出来ることとなる。10mmあれば引き起こし桿の漏れはない。
この構成にすると引き起こしケ−ス角度を0度から30度にしてもタイン爪の取り替えの必要はない。
【発明の効果】
【0019】
本発明は機体に平行状態に倒伏している稲を完全に梳くい上げる為に、タイン爪の角度を機体に対して傾斜をさせる。
タイン爪の傾斜により、倒伏稲の梳くい上げ瞬間の喰い込み角度がよくなり、
梳くい上げ効率がよくなる、更に倒伏稲に対しての瞬間梳くい上げ接触時間が3倍に増加する為に拾い残しがゼロになる画期的効果が出る。
【0020】
梳くい上げ効率がよいのでタイン爪速度を30%位下げてもタイン爪による梳くい上げは充分保持出来る、タイン爪が30%も低下すれば、タイン爪による倒伏稲の瞬間梳くい上げ叩きが減少し、瞬間叩き加重も大巾に減少すればタイン爪によるせり上げも減少する、倒伏稲の損傷が50%位は低下する。
ワラ損傷減少により、引き起こし部や引き起こしケ−ス後の搬送トラブルがなくなり、ロス時間の減少で作業能率向上、機械の寿命も長くなる。
【0021】
本発明で引き起こしケ−スが90度開き機体進行と同方向にまで開くので、掃除性が非常によくなり、分解性もよくなる。
【0022】
倒伏性能がよくなるのでタイン爪縦回し駆動型強制分草装置が不要となりコストの低減、更にタイン爪速度が30%位下がればタイン爪によるヘッドロスの大巾な減少となる。
【0023】
本発明は基本構造がタイン爪の長さが重なるように構成されている、この構成により引き起こし角度を30度進行方向に前進させた状態、更に進行方向に平行状態でも使用が可能で、非常に便利である。
【図面の簡単な説明】
【0024】
【図1】従来構造の刈り取り部を示す正面図である。
【図2】従来構造の刈り取り部を示す側面図である。
【図3】本発明の刈り取り部を示す側面図である。
【図4】本発明の刈り取り部の要部を示す側面図である。
【図5】本発明の刈り取り部の引き起こし要部を示す側面図である。
【図6】本発明刈り取り部の引き起こし部上部の取り付けと伝動状態を示す要部側面図である。
【図7】本発明刈り取り部の引き起こし部上部の取り付けと伝動状態を示す要部正面図である。
【図8】本発明刈り取り部の引き起こし部上部の取り付け回動部を示す要部平面図である。
【図9】本発明刈り取り部の引き起こし部上部を分解して全体を示す分解正面図である。
【図10】本発明刈り取り部の引き起こし部上部を分解して示す要部分解正面図である。
【図11】本発明刈り取り部の引き起こし部下部の取り付け回動部を示す要部側面図である。
【図12】本発明刈り取り部の引き起こし部下部の取り付け回動部を示す要部平面図である。
【図13】本発明刈り取り部の引き起こし部の取り付け回動状態を示し、図13−1は平行状態姿勢の要部の作用平面図、図13−2は斜め状態姿勢の要部の作用平面図、図13−3は開放状態姿勢の要部の作用平面図である。
【図14】本発明の作用を示す要部拡大作用図である。
【図15】本発明の作用を示す要部拡大作用図である。
【図16】本発明の作用を示す要部拡大作用図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態を添付した図面に基づいて説明する。
図1と図2は従来構造の刈り取り部を示すものであり、コンバインの刈り取り支持フレ−ム9に設けられた刈り取り部8の従来構造は、前面側に位置する横方向に多数のタイン爪4を有する引き起こしケ−ス5で構成された横方向のタイン爪横回し駆動型強制引き起こし装置1と、該タイン爪横回し駆動型強制引き起こし装置1の側方に位置する、縦方向に多数のタイン爪4を有する引き起こしケ−ス5で構成された縦方向のタイン爪縦回し駆動型強制分草装置3で引き起こし装置2を構成されている形態が見られる。
本発明の構成を説明するにあたって、図1と図2に従来型のコンバインの刈り取り部を例示する。符号1はタイン横回し駆動型強制引き起し装置を左右横方向に多条列配設下した引き起こし装置2であり、3はタイン横回し駆動型強制引き起し装置の側方に付設されているタイン縦回し駆動型強制分草装置である。
図3以降の図面は、本発明の実施態様を示すもので、上記の従来型よりタイン縦回し駆動型強制分草装置3を廃止して、タイン横回し駆動型強制引き起し装置1を平面視で回転移動固定自在に構成されていることを特徴とする。
【0026】
図3以降の図面は、本発明の実施態様を示すもので、上記の従来型よりタイン縦回し駆動型強制分草装置3を廃止して、タイン横回し駆動型強制引き起し装置1を平面視で回転移動固定自在に構成されていることを特徴とする。
本発明の詳細について説明する。符号18はコンバイン本体18を示しており、前方位置の刈り取り部8において、引き起こし装置2で梳き起こして刈刃16で刈り取った穀桿を搬送部17で中継搬送して後方の脱穀部31に移送供給して脱穀処理するものである。
上記刈り取り部8の引き起こし装置2は、上下方向に周回するタイン爪4を配設する引き起こしケ−ス5を有し、引き起こしケ−ス5の下部46はデバイダ−32を延設する刈り取りフレーム70の前部の取り付け支持金具33で支持され、引き起こしケ−ス5の上部45は、刈り取りフレーム70から立設される刈り取り支持フレ−ム9に横梁状の支持伝動ケ−ス36を門型状に連接し、該横梁状の支持伝動ケ−ス36に複数の引き起こし伝動ケ−ス40を垂下させ、この引き起こし伝動ケ−ス40のエルボ下端部44に支持されているものである。
上下方向に周回するタイン爪4は、引き起こし駆動スプロケット13間に懸回される引き起こしチェン14に一定間隙で多数取り付けられており、引き起こし駆動スプロケット13の伝動軸69は、コンバイン本体18からの動力を受ける縦伝動軸10、横伝動軸11、引き起こし伝動軸12を連設して各々の接続端部分をベベルギヤ53、54、65、66、67、68の噛み合い伝動を介して動力接続して駆動されるものである。
図4、図5は刈り取り部8を示す、図3はコンバイン本体18の側面部の1部を示す。
図4、図5においてタイン爪4への動力伝達は、動力源を有するコンバイン本体18から縦伝動軸10に伝導され、縦伝動軸10から横伝動軸11に更に引き起こし伝動軸12に、同軸12から引き起こし駆動スプロケット13に伝導され、引き起こし駆動スプロケット13を介して桿を梳き上げ方向に回動する引き起こしチェン14にタイン爪4が装着されている。引き起こしチェン14の回動機構並びにタイン爪4の出没機構などは従来と同様に構成されているものである。
【0027】
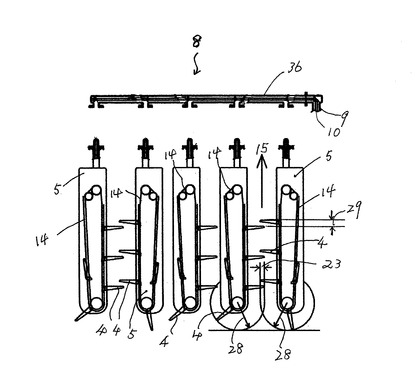
図9に示されるように、引き起こしケ−ス5を対向させて左右一対の組に配設し、該左右一対の引き起こしケ−ス5にセットされたタイン爪4の長さは引き起こしケ−ス5の横姿勢引き起こし位置において、対向する引き起こしケ−ス5間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されているもので、タイン爪4の引き起こし爪の引き上げ回転半径28は引き起こしケ−ス5の前方19から見て通常位置では重覆範囲23となり、倒伏刈りでは左右引き起こし爪間の間隙27となる。タイン爪4は引き起こし移動方向への左右引き起こし爪の上下隙間29があるので衝突はしない。
【0028】
本発明は、多条刈りコンバインの前部に配設される刈り取りフレーム70に固定されている縦方向の支持伝動ケース36に対して、稲桿を引き起こしするタイン爪4を上昇回転させる引き起こしケ−ス5を該支持伝動ケース36回りに角度調節固定自在に止めるようにして、タイン爪4をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪4をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪4をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするコンバインの引き起こし装置にしたものであり、これの詳細を以下に説明する。
【0029】
図9の刈り取り部8の中で引き起こしケ−ス5が5条刈りでは5組ある、5組がそれぞれに回動して全開するとそれぞれが図13−3のような状態になる。
全開の方法は図5の引き起こしケ−ス5の引き起こし伝動ケ−ス40の上部45とエルボ下端部44が回動軸心6を中心にして回動する、回動すると図13−3の状態になる。
引き起こしケ−ス5の下部46もエルボ下端部44、引き起こしケ−ス5の上部45と同時に回動軸心6を中心にして回動すると図3−3の様な状態になる。
【0030】
引き起こしケ−ス5はそれぞれの引き起こしケ−ス5内に引き起こしチェン14とタイン爪4を内装し、タイン爪4は矢印15の方向にそれぞれが回動する、回動することにより立ち稲並びに倒伏稲などがタイン爪4により引き起こされて、梳き上げられた状態で刈刃16により株元が切断され引き起こしケ−ス5の後方にある搬送部17により搬送され脱穀部31に入る。
【0031】
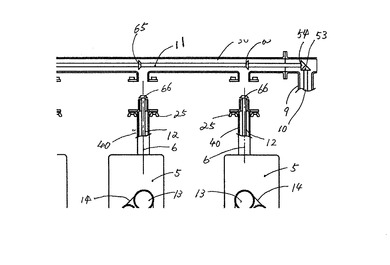
引き起こしケ−ス5の開き方は上部図7、図8、図9、図10の各喋ボルト25を緩め回動軸心6を中心に回動30をさせる。図8で上部の喋ボルト25は引き起こし伝導ケ−ス40に取り付け金具42と43がセットされ、エルボ下端部44は引き起こしケ−ス5に取り付け金具41にて固定される。
図9と図10で喋ボルト25を緩め、長孔24に沿って回動30させ、引き起こしケ−ス5を上部と同時に回動軸心6を中心に回動30をさせる。喋ボルト25の取り付け関係はデバイダ−32に引き起こしケ−ス下部の取り付け支持金具33を溶接し、取り付け連携金具35は引き起こしケ−ス5に溶接される。
【0032】
刈り取り部8は引き起こし装置2と刈り取り支持フレ−ム9で構成され、引き起こし装置2は引き起こしケ−ス5が5条刈りコンバインでは5セットあり、それぞれに引き起こしチェン14が内装されている。引き起こしチェン14にタイン爪4が複数個セットされている。
コンバイン本体18から縦伝動軸10に、更に横伝動軸11に動力伝達され、横伝動軸11には各ベベルギヤ−65が軸装され、ベベルギヤ−66は引き起こし伝動軸12に各軸装される、動力は引き起こし伝動軸12からベベルギヤ−67に、更にベベルギヤ−68に伝達され、伝動軸69に、伝動軸69に引き起こし駆動スプロケット13が軸装されて、回動し引き起こしチェン14が回転しタイン爪4が回動する。
【0033】
図10の引き起こし装置2の刈り取り支持フレ−ム9は支持伝動ケ−ス36と繋がり、支持伝動ケ−ス36は引き起こし伝動ケ−ス40にも繋がる、引き起こし伝動ケ−ス40は喋ボルト25を緩めると引き起こし伝動ケ−ス40が回動軸心6を中心に回動30する。
引き起こしチェン14,引き起こし駆動スプロケット13への伝動は縦伝動軸10からベベルギヤ−53に、更にベベルギヤ−54に、ベベルギヤ−54から横伝動軸11に、ベベルギヤ−65からベベルギヤ−66に伝達、引き起こし伝動軸12が回動し、ベベルギヤ−67からベベルギヤ−68に伝達、伝動軸69に引き起こし駆動スプロケット13に伝達され引き起こしチェン14が回動してタイン爪4が回動する。
他の引き起こしケ−ス5への回動と伝動は上記の構造と同一方法で、5条あれば同方法で回転される。
【0034】
この従来構造の刈り取り部のものは、タイン爪縦回し駆動型強制分草装置3はタイン爪4が倒伏桿52に対し進行方向に交差する構成で、倒伏桿52をタイン爪4が交差する状態から引き起こす、倒伏桿52は軟弱で更に穂先が互いに絡んでいる状態を引き起こすので倒伏桿52が切れ易い。
本発明は倒伏桿52に斜め30度からタイン爪4が引き起こすので柔らかく接当する、更に引き起こしケ−ス5は倒れ角51を持っているので、2重に柔らかく引き起こす。
現在機も倒れ角51は持っているが、それ以上に直交による打撃が大。
【0035】
本発明は機体に平行状態に倒伏している稲を完全に梳くい上げる為に、タイン爪4の角度を機体に対して傾斜させる。
タイン爪4の傾斜により、図13−2の様に倒伏桿52に対し斜めから梳くい上げる構造、斜めからタイン爪4が喰い込むので瞬間の喰い込みがよい、倒伏桿52に対して図13−2の様に梳くい上げ距離63の長さは54mmある、現在機のタイン爪巾64は18mmのみ、本発明は倒伏桿52に対し接触時間がタイン爪巾64の18mmに対し3倍の54mmもあるので拾い残しがゼロになる。
コンバインが前方19に進む時に倒伏桿52に対してタイン爪4が梳くい上げる構造になる、図13−2の引き起こし爪の傾斜角61は倒伏桿52の条件を見ながら0度から30度に設定する、引き起こし爪の傾斜角61は適宜選択が出来る。
【0036】
図13−1に示している様に、現在機はコンバイン刈り取り中タイン爪4と倒伏桿52は平行状態にある、倒伏桿52の 1株のコンバイン通過時間は刈り取り速度が0,6m/sで0,067secである、1株に倒伏桿52が25本とすると1本の倒伏桿の梳い上げ時間は0,067secの1/25になる、これでは100%の梳くい上げは困難。
本発明は梳くい上げ時間を3倍にすることにより、タイン爪4の速度を30%下げても梳くい上げ性能は低下せず、寧ろ梳くい上げ性能は大巾に向上する。
タイン爪4の速度が30%位下がればタイン爪4によるヘッドロスの減少、ヘッドロスはインデカ系の稲では非常に大きい問題で、ヘッドロスの減少効果は大である。
【0037】
図13−1は現在機の梳くい上げ時の状態を示すが倒伏桿52とタイン爪4はあくまでも平行。現在機はタイン爪4が倒伏桿52の真上に来た時にタイン爪4で叩く作用が働く、梳くい上げ作用は働かず、籾を叩き落とす。
本発明はタイン爪4の傾斜により、図13−2の様に倒伏桿52に対し斜めから梳くい上げる構造、斜めからタイン爪4が喰い込むので瞬間の喰い込みがよく、タイン爪4による脱粒はない。
【0038】
引き起こしケ−ス5を走行方向に全開構造にすると、刈り取り部8と刈り取り部8後方の掃除性、分解性を良くする。
掃除性、分解性の向上のために、図3−3の様に引き起こしケ−ス5が前方19即ち機体進行方向に向く、搬送部17の前方19に引き起こしケ−ス5がなく、その為に搬送部17に倒伏桿52が詰まっても引き出し易い、引き出す時によく怪我をした、怪我がなくなる。
図3−1は通常の刈り取り時の引き起こしケ−ス5の位置、図3−2は倒伏刈り時の引き起こしケ−ス5の位置を示す、図3−3はメンテナンスの時の引きおこしケ−ス5の位置を示す。
【0039】
現在機の引き起こしタイン爪4の長さは各回動軸心6間の中心よりそれぞれ5mm短く構成されている。本発明は基本構造即ち通常刈りの引き起こしケ−ス5の位置でタイン爪4の長さが重覆範囲23になるように構成されている、図3−2の様に引き起こしケ−ス5の角度を30度進行方向に前進させた状態で引き起こしケ−ス5をセットした場合に両タイン爪の開き27が10mmに保持出来る構造にする。
両タイン爪4の開き27が10mmに設定されるとタイン爪4からの引き起こし作用時に桿の漏れがない。
【0040】
タイン縦回し駆動型強制分草装置3のタイン71の引き起こし作用を図16で説明する、倒伏桿52は通常15cm間隔の株間で耕作されている、倒伏方向は左か右に横倒れしているのが普通、倒伏材を刈り取りする時にコンバインは刈り取り方向72に進行する、タイン71は倒伏桿52を梳くい上げようとする、しかし倒伏桿52の真上にタイン71が来た場合、コンバインの速度が高いので真上から倒伏桿52をタイン71が叩く現象割合が高い、更に1株の梳くい上げる時間が短いので100%梳くい上げる事は出来ない、どうしても残りが発生する。これが問題。
本発明の優れた所は0007に説明をしているが、15cmの株間でもタイン爪4が傾斜角61を持っているために斜めから食い込んでいく時間が長く、その作用で倒伏桿52を真上から叩く割合が非常に低く、梳くい残しがない。
【産業上の利用可能性】
【0041】
中国はインデカ系の稲が多く生産されている、ヘッドロスが少なくなるので輸出が大いに期待出来る。
【符号の説明】
【0042】
1 タイン横回し駆動型強制引き起こし装置
3 タイン縦回し駆動型強制分草装置
4 タイン爪
5 引き起こしケ−ス
6 回動軸心
9 刈り取りフレ−ム
36 支持伝動ケ−ス
40 伝導ケ−ス
【特許請求の範囲】
【請求項1】
多条刈りコンバインの前部に配設される刈り取りフレームに固定されている縦方向の支持伝動ケースに対して、稲桿を引き起こしするタイン爪を上昇回転させる引き起こしケ−スを該伝動ケース回りに角度調節固定自在に止めるようにして、タイン爪をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするコンバインの引き起こし装置。
【請求項2】
引き起こしケ−スを対向させて左右一対の組に配設し、該左右一対の引き起こしケ−スにセットされたタイン爪の長さは引き起こしケ−スの横姿勢引き起こし位置において、対向する引き起こしケ−ス間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されていることを特徴とする請求項1に記載のコンバインの引き起こし装置。
【請求項1】
多条刈りコンバインの前部に配設される刈り取りフレームに固定されている縦方向の支持伝動ケースに対して、稲桿を引き起こしするタイン爪を上昇回転させる引き起こしケ−スを該伝動ケース回りに角度調節固定自在に止めるようにして、タイン爪をコンバインの進行方向に対して横向きにする横姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して斜め向きにする斜め姿勢引き起こし位置と、タイン爪をコンバインの進行方向に対して沿わせる縦向きにする縦姿勢引き起こし位置とに、姿勢変更することを特徴とするコンバインの引き起こし装置。
【請求項2】
引き起こしケ−スを対向させて左右一対の組に配設し、該左右一対の引き起こしケ−スにセットされたタイン爪の長さは引き起こしケ−スの横姿勢引き起こし位置において、対向する引き起こしケ−ス間の芯間の1/2より長く構成されて、左右から突出するタイン爪の先端が重複配置されていることを特徴とする請求項1に記載のコンバインの引き起こし装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−143199(P2012−143199A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−4727(P2011−4727)
【出願日】平成23年1月13日(2011.1.13)
【出願人】(711000391)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月13日(2011.1.13)
【出願人】(711000391)
【Fターム(参考)】
[ Back to top ]