
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、機体本体と刈取部を作業終了姿勢に復帰制御可能としたコンバインに関する。
【背景技術】
【0002】
従来、コンバインの一形態として特許文献1に開示されたものがある。すなわち、特許文献1には、左右一対の走行部間に架設して前後方向の傾斜姿勢を制御するピッチング制御と左右方向の傾斜姿勢を制御するローリング制御を可能とした機体本体と、機体本体の前端部に昇降自在に取り付けて刈高さを制御する刈高さ制御を可能とした刈取部とを備えた構造が開示されている。かかるコンバインでは、圃場面に凹凸がある場合にも、凹凸上で走行部を走行させるとともに、機体本体は常時略水平姿勢を保つようにピッチング制御とローリング制御が適宜なされるようにしている。そして、機体本体がピッチング制御とローリング制御されている際も、刈取部の刈高さが一定に保持されるように刈高さ制御されるようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−95328
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前記したコンバインは、圃場における刈取作業等の作業が終了した場合には、機体本体に設けた作業部(脱穀部等)のクラッチを切断させる作業終了操作を行うが、かかる作業終了操作を行うと、路上における安定走行が確保できるように、機体本体は最下位置まで自動的に下降されるようにしている。この際、刈高さ制御はOFFの状態になっている。そのため、機体本体が最下位置まで下降した際に刈取部が圃場面に突っ込んで損傷等される虞がある場合には、オペレータが適宜刈取部を上昇させる手動操作をする必要性がある。
【0005】
しかしながら、作業終了操作を行う際における機体本体と刈取部の地上高(対地高さ)や姿勢から、刈取部が圃場面に突っ込む虞があるかないかの状況判断は、経験の少ないオペレータにとっては煩雑であり、刈取部を上昇操作する必要性があるにも拘わらず、その操作を失念することがあった。そのため、作業終了操作時の刈取部の上昇操作はオペレータにとって精神的負担となっていた。
【0006】
そこで、本発明は、作業終了操作がなされた際には自動的に刈取部を地上面に接地させないように地上高を制御する地上高制御がなされるコンバインを提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明は、次のような特徴を有する。
請求項1記載の発明に係るコンバインは、左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させたことを特徴とする。
【0008】
かかるコンバインでは、作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。そのため、刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避することができる。
【0009】
請求項2記載の発明に係るコンバインは、請求項1記載の発明に係るコンバインであって、前記地上高制御は、機体本体を設定位置まで下降させると刈取部が地上面に衝突する場合にのみ刈取部を上昇させて刈取部の地上高を制御するようにしたことを特徴とする。
【0010】
かかるコンバインでは、作業部のクラッチを切断させる作業終了操作を行うと、機体本体が設定位置まで下降される。この際、刈取部が地上面に衝突する場合には刈取部が上昇される制御がなされる。なお、機体本体を設定位置まで下降させた場合にも刈取部が地上面に衝突しない場合には、刈取部が上昇される不必要な制御はなされない。
【0011】
請求項3記載の発明に係るコンバインは、請求項1又は2記載の発明に係るコンバインであって、刈取部の上昇動作と機体本体の下降動作は同時進行で行われるようにしたことを特徴とする。
【0012】
かかるコンバインでは、刈取部が地上面に接地しない高さに上昇させながら、機体本体を設定位置まで下降させる下降復帰制御がなされるため、効率良く機体本体を下降復帰させることができて、後続の移動作業を行うことができる。
【発明の効果】
【0013】
本発明は次のような効果を奏する。すなわち、作業終了操作がなされた際には、自動的に刈取部の地上高が地上面(圃場面)よりも上方に保持されるように地上高制御がなされるため、オペレータの精神的負担が軽減される。具体的には、機体本体と刈取部の現状の地上高から、そのまま機体本体を下降させると刈取部が圃場面に突っ込む虞があるかないかの状況判断をオペレータ自身が行う必要性がない。そのため、特に、経験の少ないオペレータにとっては刈取部の昇降操作を手動操作で行う煩雑性やその昇降操作を失念する心配もなくなって操作性が向上する。
【図面の簡単な説明】
【0014】
【図1】本発明に係るコンバインの側面説明図。
【図2】運転部の説明図。
【図3】走行部の側面説明図。
【図4】走行部の平面説明図。
【図5】昇降機構の説明図。
【図6】油圧回路図。
【図7】制御ブロック図。
【図8】フローチャート。
【発明を実施するための形態】
【0015】
以下に、図面を参照しながら本発明の実施形態を説明する。
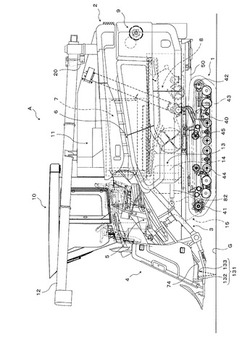
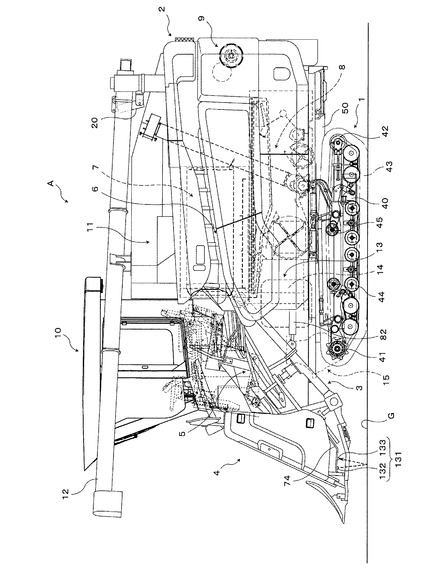
本発明の一実施例に係るコンバインAの全体構成について、図1を参照しながら説明する。すなわち、コンバインAは、左右一対のクローラ式の走行部1間に機体本体2を昇降自在に架設している。機体本体2の左側前部には、刈取フレーム3を介して刈取部4を昇降自在に取り付けている。刈取部4には搬送部5を設けている。機体本体2の左側部には、脱穀部7と選別部8を上下段に配設するとともに、機体本体2の後部には、排藁処理部9を配設している。6は脱穀部7の側方に配設した穀稈移送部である。一方、機体本体2の右側前部には、キャビン10を配設するとともに、機体本体2の右側中途部には、穀粒貯留部11を配設している。穀粒貯留部11は、穀粒般出用のオーガ12を有する。また、コンバインAは、機体本体2の前部に、駆動源としてのエンジン14を含む原動機部13を備える。原動機部13は、エンジン14の動力を各部の駆動部に供給する。そして、脱穀クラッチ(図示せず)を介してエンジン14から脱穀部7へ伝達される動力を接続・切断可能としている。また、刈取クラッチ(図示せず)を介してエンジン14から刈取部4へ伝達される動力を接続・切断可能としている。なお、脱穀クラッチと刈取クラッチは、それぞれ後述する刈取スイッチ31と作業クラッチスイッチ32を操作することで作業コントローラ100を介してアクチュエータにより接続・切断作動させるようにしている。
【0016】
原動機部13の前方には、ミッション部15を設けている。ミッション部15は、原動機部13が有するエンジン14の動力を走行部1や刈取部4等に伝達する前に調整(変速)する。
【0017】
以上のような構成を備えるコンバインAは、刈取部4により穀稈を刈り取り、刈り取った穀稈を搬送部5により後上方の穀稈移送部6まで搬送して、穀稈移送部6に穀稈を受け渡す。穀稈移送部6に受け渡された穀稈は、穀稈移送部6により株元を挟扼されるとともに穂先を脱穀部7内に挿入させた状態で後方へ移送される。
【0018】
これにより、穀稈は、脱穀部7によって脱穀される。脱穀により得られた穀粒は、選別部8により選別されて、精粒のみが穀粒貯留部11に搬送されて貯留され、必要に応じてオーガ12を介して搬出される。
【0019】
また、脱穀された穀稈は、排藁として排藁処理部9に搬送され、この排藁処理部9にて細断・排出処理される。
【0020】
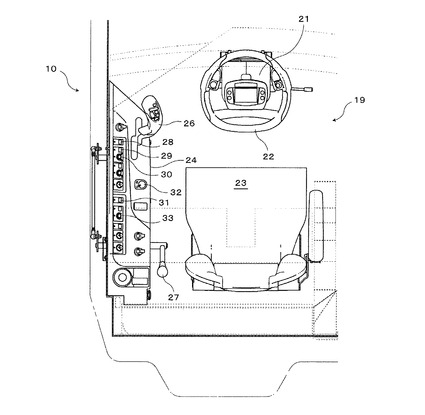
キャビン10は、全体として略四角形箱型に形成して、図2に示すように、内部に運転部19を設けている。運転部19にはステアリングケース21を設けて、ステアリングケース21の上端部に操向手段としてのステアリングホイール22を取り付けている。ステアリングホイール22の後方位置には運転席23を配置し、運転席23の前方から左側方にかけて、サイドコラム24を配設している。
【0021】
サイドコラム24の上面前部には、変速手段としての主変速レバー26を上方へ突出させて配置するとともに、サイドコラム24の内側面後部に副変速レバー27を上方へ突出させて配置している。サイドコラム24の上面部にはピッチング制御スイッチ28、ローリング制御スイッチ29、左右傾斜設定器30、刈取スイッチ31、作業クラッチスイッチ32及び刈高さ設定器33等を配設している。
【0022】
ピッチング制御スイッチ28とローリング制御スイッチ29と刈取スイッチ31はON・OFF式スイッチである。左右傾斜設定器30と刈高さ設定器33は手動ダイヤル切換式ポテンショメータ形の設定器である。左右傾斜設定器30は、中央部を基準に左側方(反時計廻り)ないしは右側方(時計廻り)へ回動操作して、機体本体2の左右方向の傾斜角度の基準値を初期設定するようにしている。左右傾斜設定器30は、基準となる中央部に設定すると、機体本体2を略水平姿勢に保持するようにローリング制御がなされ、また、左・右いずれかに回動させて傾斜角度を設定することで、機体本体2を設定傾斜姿勢に保持するようにローリング制御がなされるようにしている。刈取スイッチ31は刈取部4を作動ないしは作動停止させるためのスイッチである。作業クラッチスイッチ32は上下方向の軸線廻りに一定角度だけ回動操作可能とするとともに、下方へ押し下げ移動可能としている。作業クラッチスイッチ32を基準位置から一定角度回動操作すると、脱穀クラッチと刈取クラッチを接続させて脱穀部7と刈取部4を作動させることができる。そして、同状態にある作業クラッチスイッチ32を下方へ押し下げ操作すると、脱穀クラッチと刈取クラッチを切断させて脱穀部7と刈取部4を作動停止させることができる。また、脱穀部7と刈取部4を作動させている状態で、刈取スイッチ31をOFFにすると脱穀部7だけを作動させることができる。そして、刈取スイッチ31をONにすると刈取部4の作動が再開される。
【0023】
走行部1は、図1に示すように、前後方向に伸延する走行フレーム40と、ミッション部15に連動連結した駆動輪41と、テンション式の従動輪42と、両輪41,42間に巻回した履帯43と、履帯43の接地側を接地状態に保持する複数の下側転動輪44と、履帯43の非接地側を保持する上側転動輪45を具備している。
【0024】
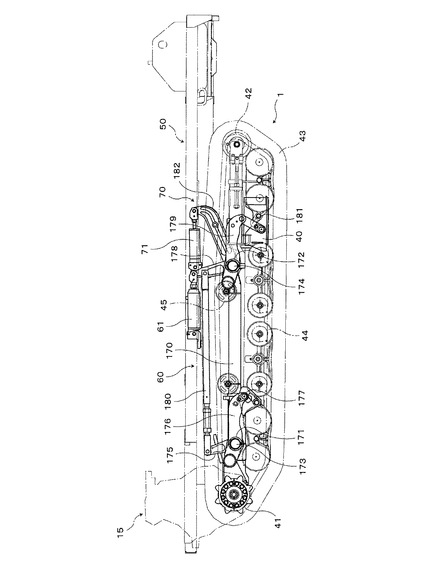
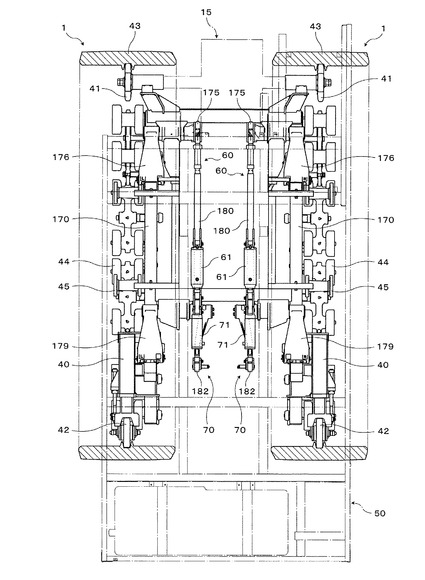
図3及び図4に示すように、機体本体2の下部を形成する機体フレーム50は平面視矩形枠状に形成して、左右一対の走行部1の直上方に配置している。そして、機体フレーム50と左右一対の走行フレーム40との間には、機体本体2の左右方向の傾斜角度を変更する左右一対のローリング機構60と、機体本体2の前後方向の傾斜角度を変更する左右一対のピッチング機構70を介設している。そして、ローリング機構60はローリングシリンダ61を有し、また、ピッチング機構70はピッチングシリンダ71を有している。両機構60,70は、ローリングシリンダ61とピッチングシリンダ71を適宜伸縮作動(協働)させることで、機体本体2を地面の形成に拘わらず略水平姿勢(対地傾斜角度を設定角度)に保持させることも、また同時に、略水平姿勢ないしは一定傾斜姿勢にて機体本体2を適宜昇降させることもできるようにしている。
【0025】
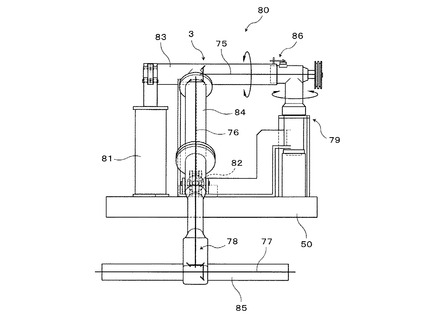
刈取部4は、図5に示すように、昇降機構80により機体本体2に昇降自在となしている。昇降機構80は、機体フレーム50上の前部に左右に対向させて設けた左・右側支持体79,81間に刈取フレーム3を上下回動自在に取り付けて、刈取フレーム3を昇降シリンダ82により上下回動作動させるようにしている。刈取フレーム3は、左右方向に伸延する円筒状の第1フレーム形成片83と、前後方向に伸延する円筒状の第2フレーム形成片84と、左右方向に伸延する円筒状の第3フレーム形成片85とから形成している。第1フレーム形成片83は、左右に対向する左・右側支持体79,81間に、第1フレーム形成片83をその軸線廻りに回動自在に横架している。第2フレーム形成片84は、第1フレーム形成片83の中途部に基端部を直交状態に連通連設し、先端部に第3フレーム形成片85の中途部を直交状態に連通連設している。そして、第1〜第3フレーム形成片83,84,85中にはそれぞれ第1・第2・第3伝動軸75,76,77を軸架するとともに相互に連動連結して刈取連動機構78を形成している。刈取連動機構78は搬送部5等の駆動部に動力を伝達するようにしている。昇降シリンダ82は、機体フレーム50の前端部と第2フレーム形成片84の中途部との間に介設している。左側支持体79の上半部は左側支持体79の軸線廻りに回動自在となして、刈取部4を左側外方へ回動移動可能となしている。
【0026】
また、左側支持体79の上端部と第1フレーム形成片83の左側端部との間には、回動ポテンショメータ式の昇降センサ86を介設して、機体本体2側である左側支持体79と刈取部4側である第1フレーム形成片83との同一軸線廻りの相対位置を検出することで、機体本体2と刈取部4との相対高さを検出するようにしている。
【0027】
図1に示すように、搬送部5の前側下部にはブラケット74を介して非接触式の刈高さセンサ131を設けて、刈取部4と地上面である圃場面Gとの対地高さを検出するようにしている。ここで、刈高さセンサ131には超音波センサを採用して、その発信器132の発信部と受信機133の受信部を圃場面Gに向けて配置している。
【0028】
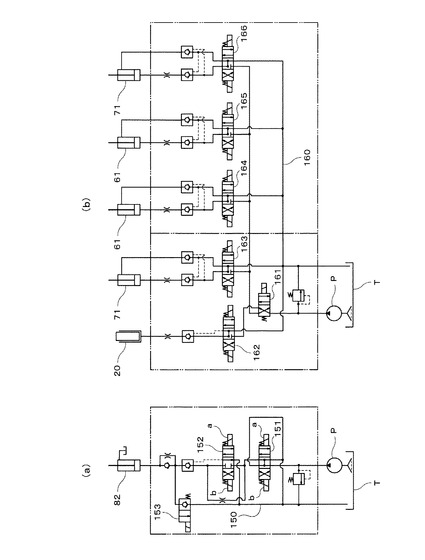
図6は油圧回路の説明図であり、図6(a)は刈取部4を昇降させる昇降シリンダ82の油圧回路図、図6(b)はその他の機能部シリンダ、すなわち、ローリングシリンダ61とピッチングシリンダ71とオーガ12を昇降させるオーガシリンダ20の油圧回路図である。
【0029】
昇降シリンダ82は刈取部昇降油圧回路150を介して油圧ポンプP及びオイルタンクTに流体接続している。刈取部昇降油圧回路150には第1電磁弁151と第2電磁弁152と第3電磁弁153を設けている。そして、第1電磁弁151の一側部bを励磁することで、昇降シリンダ82を低速伸長作動可能としている。第1電磁弁151の一側部bを励磁するとともに、第2電磁弁152の他側部aを励磁することで、昇降シリンダ82を高速伸長作動可能としている。第3電磁弁153をONさせることで、昇降シリンダ82を低速短縮作動可能としている。第1電磁弁151の一側部bを励磁するとともに、第2電磁弁152の一側部bを励磁することで、昇降シリンダ82を高速短縮作動可能としている。
【0030】
機能部シリンダは機能部作動用油圧回路160を介して油圧ポンプP及びオイルタンクTに流体接続している。機能部作動用油圧回路160には第4〜第9電磁弁161〜166を設けている。そして、第4電磁弁161によりオーガシリンダ20とローリングシリンダ61及びピッチングシリンダ71への給油回路を切換可能として、第5〜9電磁弁162〜166によりオーガシリンダ20と左右ローリングシリンダ61と左右ピッチングシリンダ71への給油回路を切換可能としている。
【0031】
このように、昇降シリンダ82とその他の機能部シリンダはそれぞれ独立させて伸縮作動させることができる。したがって、昇降シリンダ82により刈取部4を昇降させるとともに、機体本体2を下降させる後述の下降復帰制御機能及び地上高制御機能を確保することができる。
【0032】
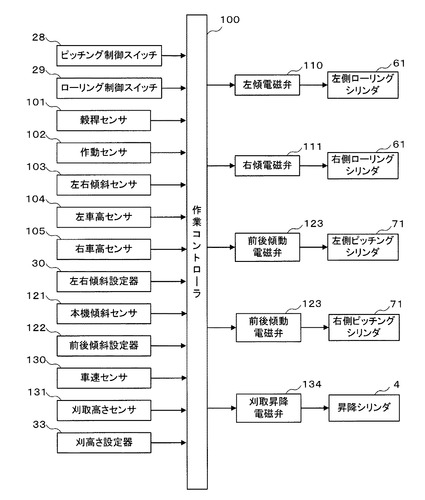
上記したローリング機構60とピッチング機構70と昇降機構80は、図7の機能ブロック図に示すように、マイクロコンピュータ等によって形成した作業コントローラ100により自動姿勢制御と刈高さ制御と下降復帰制御と地上高制御が行えるように構成している。作業コントローラ100は、各種演算処理や制御を実行するための中央処理装置(CPU)、制御プログラムを記憶させた読み出し専用メモリ(ROM)、各種検出値やデータ等を一時的に記憶させる随時読み書き可能メモリ(RAM)、作業コントローラ100の電源をOFFにしても記憶データを保持する不揮発性メモリ(フラッシュメモリ)、タイマー機能としてのクロック、インターフェイス、バス等を備えている。
【0033】
作業コントローラ100には、入力系の各種センサ及びスイッチ類を接続している。すなわち、作業コントローラ100には、ピッチング制御スイッチ28と、ローリング制御スイッチ29と、刈取部4によって刈り取った刈取穀稈を検出する穀稈センサ101と、刈取部4の作動を検出する作動センサ102と、機体本体2の左右方向の傾斜角度を検出する振り子式の左右傾斜センサ103と、機体本体2と左側の走行フレーム40との相対間隔(車高)を検出するポテンショメータ形の左車高センサ104と、機体本体2と右側の走行フレーム40との相対間隔(車高)を検出するポテンショメータ形の右車高センサ105と、左右傾斜設定器30を接続している。
【0034】
また、作業コントローラ100には、出力系の各種電磁油圧バルブを接続している。すなわち、作業コントローラ100には、左傾電磁弁110と右傾電磁弁111を接続している。このようにして、左右傾斜センサ103の検出値と左車高センサ104の検出値と右車高センサ105の検出値とに基づき、左傾電磁弁110又は右傾電磁弁111を切換えて、左車高を調節作動する左側ローリングシリンダ61又は右車高を調節作動する右側ローリングシリンダ61を伸縮作動させて、機体本体2の左右方向の傾斜を修正することで、機体本体2が略水平姿勢ないしは設定傾斜姿勢となるように自動姿勢制御する。
【0035】
そして、作業コントローラ100には、機体本体2の前後方向の傾斜角度を検出する振り子式の前後傾斜センサ120と、機体本体2の後部と走行フレーム40の後端側との相対間隔(走行フレーム40の前後方向の対本機傾斜角度)を検出するポテンショメータ形の本機傾斜センサ121と、機体本体2の前後方向の傾斜角度の基準値を初期設定する手動ダイヤル切換式ポテンショメータ形の前後傾斜設定器122を接続している。
【0036】
また、作業コントローラ100には、前後傾斜電磁弁123を接続している。このようにして、前後傾斜センサ120の検出値と本機傾斜センサ121の検出値と前後傾斜設定器122の設定値に基づき、前後傾斜電磁弁123を切換えて、機体本体2の前後傾斜を調節作動する左右側のピッチングシリンダ71を伸縮作動させて、機体本体2の前後方向の傾斜を修正することで、機体本体2が略水平姿勢となるように自動姿勢制御する。
【0037】
作業コントローラ100には、履帯43の回転速度(車速)を検出する車速センサ130と、刈取部4の対地高さを検出するポテンショメータ形の刈取高さセンサ131と、刈取部4の対地高さ基準値を初期設定する手動ダイヤル切換式ポテンショメータ形の刈高さ設定器33を接続している。
【0038】
また、作業コントローラ100には、刈取昇降電磁弁134を接続している。このようにして、車速センサ130の検出値と刈取高さセンサ131の検出値と刈高さ設定器33の設定値とに基づき、刈取昇降電磁弁134を切換えて、昇降シリンダ82を伸縮作動させることで、刈取部4の対地高さを修正して、刈取部4により穀稈刈取高さが略一定となるように刈高さ制御する。この際、刈高さセンサ131の発信器132には作業コントローラ100からの指令により発信駆動回路(図示せず)を介して適宜所定時間間隔にて超音波を発信し、圃場面等の非検出物に反射された反射波は受信器133で受信して、その検出信号は受信増幅回路(図示せず)を介して作業コントローラ100に入力される。前記昇降センサ86の検出信号もA/D変換器を介して上記所定時間間隔ごとに作業コントローラ100に入力される。刈高さ設定器33による設定値は、昇降センサ86の検出値における所定値に対応する。
【0039】
上記のように構成した本実施形態では、機体本体2と刈取部4の自動姿勢制御、刈高さ制御、下降復帰制御及び地上高制御が自動的になされる。
【0040】
自動姿勢制御では、機体本体2が所要の地上高にて略水平姿勢に保持されるように昇降制御とローリング制御とピッチング制御がなされ、刈高さ制御では、穀稈刈取高さが略一定となるように刈取部4の刈高さが制御され、作業終了操作がなされた際には自動姿勢制御及び刈高さ制御は終了となる。そして、自動的に機体本体2が略水平姿勢に復帰されながら設定位置まで下降復帰される下降復帰制御と、刈取部4の地上高が地上面(圃場面)よりも上方に保持される地上高制御が開始される。
【0041】
作業終了操作は、作業クラッチスイッチ32をOFFさせることで、脱穀クラッチが切断されて、エンジン14から脱穀部7へ伝達される動力が切断される操作である。その場合には、作業クラッチスイッチ32のOFF操作信号が作業コントローラ100に発信されることで、作業コントローラ100は作業終了操作なされたと判断して下降復帰制御と地上高制御を開始するようにプログラム制御している。
【0042】
下降復帰制御では、機体本体2が設定位置(本実施形態では最下降位置)まで略水平姿勢にて下降復帰されるように下降制御とローリング制御とピッチング制御がなされる。
【0043】
地上高制御では、刈取部4が地上面に接地しないように刈取部4を所定の地上高(例えば、数cm)に保つように昇降制御される。この際、刈取部4の昇降シリンダ82による上昇動作と機体本体2のローリングシリンダ61とピッチングシリンダ71による下降動作は同時進行で行われるようにしている。また、地上高制御は、機体本体2を設定位置まで下降させると刈取部4が地上面に衝突する場合にのみ刈取部4を上昇させて刈取部4の地上高を制御するようにしている。
【0044】
ここで、機体本体2を略水平姿勢に復帰させるローリング制御とピッチング制御を行うためのローリングシリンダ61及びピッチングシリンダ71を制御するための機能部作動用油圧回路160と、刈取部4を昇降させる昇降シリンダ82を制御するための刈取部昇降油圧回路150は、前記したようにそれぞれ個別に形成している。そうすることで、ローリングシリンダ61及びピッチングシリンダ71と昇降シリンダ82を適宜独立させて同時に伸縮作動させることができるようにしている。
【0045】
したがって、本実施形態では、機体本体2を略水平姿勢に復帰させながら最下位置まで下降させる下降復帰制御がなされるため、機体本体2の下降復帰を迅速に行うことができる。そして、同時に刈取部4の地上高を確保する地上高制御も堅実に行うことができる。
【0046】
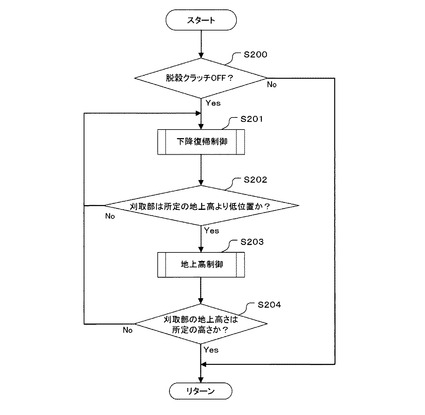
図8は、自動モードのフローチャートである。脱穀スイッチがOFFされて、脱穀クラッチがOFFされると(S200;Yes)、作業終了操作がなされたと作業コントローラ100が判断して、下降復帰制御(S201)がなされる。刈取部4が所定の地上高よりも低位置にある場合には(S202;Yes)、地上高制御(S203)がなされる。また、刈取部4が所定の地上高よりも高位置にある場合や(S202;No)、刈取部4の地上高が所定の高さにない場合には(S204;No)、下降復帰制御(S201)が再開される。
【0047】
また、下降復帰制御は、機体本体2を略水平姿勢に復帰させた後に、最下位置まで下降させるようにすることもできる。この場合、機体本体2を略水平姿勢に復帰させた後に、最下位置まで下降させる下降復帰制御がなされるため、下降復帰制御と地上高制御をそれぞれ堅実に行うことができる。
【0048】
機体本体2を昇降させ、ローリングさせ、そして、ピッチングさせる前記ローリング機構60とピッチング機構70の構成を、図3及び図4を参照しながら具体的に説明する。
【0049】
すなわち、機体フレーム50の下面側に前後方向に伸延する左右一対のリンク支持体170を取り付けている。各リンク支持体170の前部に前部軸受体171を設ける一方、後部に後部軸受体172を設けている。各前・後部軸受体171,172には左右方向に軸芯を向けた前・後部リンク支軸173,174を貫通させている。
【0050】
各前部リンク支軸173の一側端には上下方向に伸延する上側前部ローリングアーム175の基端部を取り付けている。各前部リンク支軸173の他側端には前後方向に伸延する下側前部ローリングアーム176の基端部を取り付けている。このようにして、前部リンク支軸173を介して上・下側前部ローリングアーム175,176を一体回動自在に軸支している。また、各下側前部ローリングアーム176の先端部は走行フレーム40の前部に連結軸177を介して連結している。
【0051】
各後部リンク支軸174の一側端には上下方向に伸延する上側後部ローリングアーム178の基端部を回動可能に嵌合させて取り付けている。各上側前部ローリングアーム175の先端部と各上側後部ローリングアーム178の先端部とを、前後方向に伸延する連結ロッド180を介して連結している。各上側後部ローリングアーム178の先端と走行フレーム40の中途部との間にローリングシリンダ61を介設している。各後部リンク支軸174の他側端には前後方向に伸延する左右一対の下側後部ローリングアーム179の基端部を取り付けている。また、各下側後部ローリングアーム179の先端部はリンク181を介して走行フレーム40の後部に連結している。
【0052】
各後部リンク支軸174の一側端には前後方向に伸延するピッチングアーム182の基端部を取り付けている。このようにして、ピッチングアーム182と下側後部ローリングアーム179は後部リンク支軸174を介して一体回動自在に軸支している。各上側後部ローリングアーム178の先端と各ピッチングアーム182の先端部との間にはピッチングシリンダ71を介設している。
【0053】
上記のように構成して、ローリング機構60は、上・下側前部ローリングアーム175,176、上・下側後部ローリングアーム178,179、連結ロッド180及びリンク181を具備して、ローリングシリンダ61が伸縮作動することで、上・下側前部ローリングアーム175,176が前部リンク支軸173を中心にして一体回動するとともに、上・下側後部ローリングアーム178,179とピッチングアーム182とローリングシリンダ61が後部リンク支軸174を中心にして一体回動するようにしている。そして、ローリングシリンダ61が伸縮作動した際には、走行フレーム40に対して機体フレーム50の前後方向の傾斜角度を維持しながら、機体フレーム50と走行フレーム40の相対間隔を変化させる。左右の履帯43の沈下量が変化して機体フレーム50(機体本体2)が左右に傾動した場合、又は、オペレータが機体フレーム50(機体本体2)を左右に傾動させたい場合、ローリングシリンダ61の自動制御又は手動操作によって機体フレーム50(機体本体2)の左右方向の傾斜角度を変化させて、機体フレーム50(機体本体2)の左右方向の対地傾斜角度を略水平姿勢に保持させることができる。
【0054】
ピッチング機構70は、下側後部ローリングアーム179、リンク181及びピッチングアーム182を具備して、ピッチングシリンダ71が伸縮作動することで、下側後部ローリングアーム179とピッチングアーム182が後部リンク支軸174を中心にして一体回動して、リンク181を介して前部リンク支軸173を中心にして走行フレーム40を回動させるようにしている。そして、ピッチングシリンダ71が伸縮作動した際には、機体フレーム50の左右方向の傾斜角度を維持しながら、走行フレーム40に対して機体フレーム50の前後方向の傾斜角度を変化させる。左右の履帯43を移動させる走行路面が上り傾斜又は下り傾斜の斜面の場合、又はオペレータが機体フレーム50(機体本体2)を傾斜させたい場合、ピッチングシリンダ71の自動制御又は手動操作によって機体フレーム50(機体本体2)の前後方向の傾斜角度を変化させて、機体フレーム50(機体本体2)の前後方向の対地傾斜角度を略水平姿勢に保持させることができる。
【符号の説明】
【0055】
A コンバイン
1 走行部
2 機体本体
3 刈取フレーム
4 刈取部
60 ローリング機構
70 ピッチング機構
80 昇降機構
【技術分野】
【0001】
本発明は、機体本体と刈取部を作業終了姿勢に復帰制御可能としたコンバインに関する。
【背景技術】
【0002】
従来、コンバインの一形態として特許文献1に開示されたものがある。すなわち、特許文献1には、左右一対の走行部間に架設して前後方向の傾斜姿勢を制御するピッチング制御と左右方向の傾斜姿勢を制御するローリング制御を可能とした機体本体と、機体本体の前端部に昇降自在に取り付けて刈高さを制御する刈高さ制御を可能とした刈取部とを備えた構造が開示されている。かかるコンバインでは、圃場面に凹凸がある場合にも、凹凸上で走行部を走行させるとともに、機体本体は常時略水平姿勢を保つようにピッチング制御とローリング制御が適宜なされるようにしている。そして、機体本体がピッチング制御とローリング制御されている際も、刈取部の刈高さが一定に保持されるように刈高さ制御されるようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−95328
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前記したコンバインは、圃場における刈取作業等の作業が終了した場合には、機体本体に設けた作業部(脱穀部等)のクラッチを切断させる作業終了操作を行うが、かかる作業終了操作を行うと、路上における安定走行が確保できるように、機体本体は最下位置まで自動的に下降されるようにしている。この際、刈高さ制御はOFFの状態になっている。そのため、機体本体が最下位置まで下降した際に刈取部が圃場面に突っ込んで損傷等される虞がある場合には、オペレータが適宜刈取部を上昇させる手動操作をする必要性がある。
【0005】
しかしながら、作業終了操作を行う際における機体本体と刈取部の地上高(対地高さ)や姿勢から、刈取部が圃場面に突っ込む虞があるかないかの状況判断は、経験の少ないオペレータにとっては煩雑であり、刈取部を上昇操作する必要性があるにも拘わらず、その操作を失念することがあった。そのため、作業終了操作時の刈取部の上昇操作はオペレータにとって精神的負担となっていた。
【0006】
そこで、本発明は、作業終了操作がなされた際には自動的に刈取部を地上面に接地させないように地上高を制御する地上高制御がなされるコンバインを提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明は、次のような特徴を有する。
請求項1記載の発明に係るコンバインは、左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させたことを特徴とする。
【0008】
かかるコンバインでは、作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。そのため、刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避することができる。
【0009】
請求項2記載の発明に係るコンバインは、請求項1記載の発明に係るコンバインであって、前記地上高制御は、機体本体を設定位置まで下降させると刈取部が地上面に衝突する場合にのみ刈取部を上昇させて刈取部の地上高を制御するようにしたことを特徴とする。
【0010】
かかるコンバインでは、作業部のクラッチを切断させる作業終了操作を行うと、機体本体が設定位置まで下降される。この際、刈取部が地上面に衝突する場合には刈取部が上昇される制御がなされる。なお、機体本体を設定位置まで下降させた場合にも刈取部が地上面に衝突しない場合には、刈取部が上昇される不必要な制御はなされない。
【0011】
請求項3記載の発明に係るコンバインは、請求項1又は2記載の発明に係るコンバインであって、刈取部の上昇動作と機体本体の下降動作は同時進行で行われるようにしたことを特徴とする。
【0012】
かかるコンバインでは、刈取部が地上面に接地しない高さに上昇させながら、機体本体を設定位置まで下降させる下降復帰制御がなされるため、効率良く機体本体を下降復帰させることができて、後続の移動作業を行うことができる。
【発明の効果】
【0013】
本発明は次のような効果を奏する。すなわち、作業終了操作がなされた際には、自動的に刈取部の地上高が地上面(圃場面)よりも上方に保持されるように地上高制御がなされるため、オペレータの精神的負担が軽減される。具体的には、機体本体と刈取部の現状の地上高から、そのまま機体本体を下降させると刈取部が圃場面に突っ込む虞があるかないかの状況判断をオペレータ自身が行う必要性がない。そのため、特に、経験の少ないオペレータにとっては刈取部の昇降操作を手動操作で行う煩雑性やその昇降操作を失念する心配もなくなって操作性が向上する。
【図面の簡単な説明】
【0014】
【図1】本発明に係るコンバインの側面説明図。
【図2】運転部の説明図。
【図3】走行部の側面説明図。
【図4】走行部の平面説明図。
【図5】昇降機構の説明図。
【図6】油圧回路図。
【図7】制御ブロック図。
【図8】フローチャート。
【発明を実施するための形態】
【0015】
以下に、図面を参照しながら本発明の実施形態を説明する。
本発明の一実施例に係るコンバインAの全体構成について、図1を参照しながら説明する。すなわち、コンバインAは、左右一対のクローラ式の走行部1間に機体本体2を昇降自在に架設している。機体本体2の左側前部には、刈取フレーム3を介して刈取部4を昇降自在に取り付けている。刈取部4には搬送部5を設けている。機体本体2の左側部には、脱穀部7と選別部8を上下段に配設するとともに、機体本体2の後部には、排藁処理部9を配設している。6は脱穀部7の側方に配設した穀稈移送部である。一方、機体本体2の右側前部には、キャビン10を配設するとともに、機体本体2の右側中途部には、穀粒貯留部11を配設している。穀粒貯留部11は、穀粒般出用のオーガ12を有する。また、コンバインAは、機体本体2の前部に、駆動源としてのエンジン14を含む原動機部13を備える。原動機部13は、エンジン14の動力を各部の駆動部に供給する。そして、脱穀クラッチ(図示せず)を介してエンジン14から脱穀部7へ伝達される動力を接続・切断可能としている。また、刈取クラッチ(図示せず)を介してエンジン14から刈取部4へ伝達される動力を接続・切断可能としている。なお、脱穀クラッチと刈取クラッチは、それぞれ後述する刈取スイッチ31と作業クラッチスイッチ32を操作することで作業コントローラ100を介してアクチュエータにより接続・切断作動させるようにしている。
【0016】
原動機部13の前方には、ミッション部15を設けている。ミッション部15は、原動機部13が有するエンジン14の動力を走行部1や刈取部4等に伝達する前に調整(変速)する。
【0017】
以上のような構成を備えるコンバインAは、刈取部4により穀稈を刈り取り、刈り取った穀稈を搬送部5により後上方の穀稈移送部6まで搬送して、穀稈移送部6に穀稈を受け渡す。穀稈移送部6に受け渡された穀稈は、穀稈移送部6により株元を挟扼されるとともに穂先を脱穀部7内に挿入させた状態で後方へ移送される。
【0018】
これにより、穀稈は、脱穀部7によって脱穀される。脱穀により得られた穀粒は、選別部8により選別されて、精粒のみが穀粒貯留部11に搬送されて貯留され、必要に応じてオーガ12を介して搬出される。
【0019】
また、脱穀された穀稈は、排藁として排藁処理部9に搬送され、この排藁処理部9にて細断・排出処理される。
【0020】
キャビン10は、全体として略四角形箱型に形成して、図2に示すように、内部に運転部19を設けている。運転部19にはステアリングケース21を設けて、ステアリングケース21の上端部に操向手段としてのステアリングホイール22を取り付けている。ステアリングホイール22の後方位置には運転席23を配置し、運転席23の前方から左側方にかけて、サイドコラム24を配設している。
【0021】
サイドコラム24の上面前部には、変速手段としての主変速レバー26を上方へ突出させて配置するとともに、サイドコラム24の内側面後部に副変速レバー27を上方へ突出させて配置している。サイドコラム24の上面部にはピッチング制御スイッチ28、ローリング制御スイッチ29、左右傾斜設定器30、刈取スイッチ31、作業クラッチスイッチ32及び刈高さ設定器33等を配設している。
【0022】
ピッチング制御スイッチ28とローリング制御スイッチ29と刈取スイッチ31はON・OFF式スイッチである。左右傾斜設定器30と刈高さ設定器33は手動ダイヤル切換式ポテンショメータ形の設定器である。左右傾斜設定器30は、中央部を基準に左側方(反時計廻り)ないしは右側方(時計廻り)へ回動操作して、機体本体2の左右方向の傾斜角度の基準値を初期設定するようにしている。左右傾斜設定器30は、基準となる中央部に設定すると、機体本体2を略水平姿勢に保持するようにローリング制御がなされ、また、左・右いずれかに回動させて傾斜角度を設定することで、機体本体2を設定傾斜姿勢に保持するようにローリング制御がなされるようにしている。刈取スイッチ31は刈取部4を作動ないしは作動停止させるためのスイッチである。作業クラッチスイッチ32は上下方向の軸線廻りに一定角度だけ回動操作可能とするとともに、下方へ押し下げ移動可能としている。作業クラッチスイッチ32を基準位置から一定角度回動操作すると、脱穀クラッチと刈取クラッチを接続させて脱穀部7と刈取部4を作動させることができる。そして、同状態にある作業クラッチスイッチ32を下方へ押し下げ操作すると、脱穀クラッチと刈取クラッチを切断させて脱穀部7と刈取部4を作動停止させることができる。また、脱穀部7と刈取部4を作動させている状態で、刈取スイッチ31をOFFにすると脱穀部7だけを作動させることができる。そして、刈取スイッチ31をONにすると刈取部4の作動が再開される。
【0023】
走行部1は、図1に示すように、前後方向に伸延する走行フレーム40と、ミッション部15に連動連結した駆動輪41と、テンション式の従動輪42と、両輪41,42間に巻回した履帯43と、履帯43の接地側を接地状態に保持する複数の下側転動輪44と、履帯43の非接地側を保持する上側転動輪45を具備している。
【0024】
図3及び図4に示すように、機体本体2の下部を形成する機体フレーム50は平面視矩形枠状に形成して、左右一対の走行部1の直上方に配置している。そして、機体フレーム50と左右一対の走行フレーム40との間には、機体本体2の左右方向の傾斜角度を変更する左右一対のローリング機構60と、機体本体2の前後方向の傾斜角度を変更する左右一対のピッチング機構70を介設している。そして、ローリング機構60はローリングシリンダ61を有し、また、ピッチング機構70はピッチングシリンダ71を有している。両機構60,70は、ローリングシリンダ61とピッチングシリンダ71を適宜伸縮作動(協働)させることで、機体本体2を地面の形成に拘わらず略水平姿勢(対地傾斜角度を設定角度)に保持させることも、また同時に、略水平姿勢ないしは一定傾斜姿勢にて機体本体2を適宜昇降させることもできるようにしている。
【0025】
刈取部4は、図5に示すように、昇降機構80により機体本体2に昇降自在となしている。昇降機構80は、機体フレーム50上の前部に左右に対向させて設けた左・右側支持体79,81間に刈取フレーム3を上下回動自在に取り付けて、刈取フレーム3を昇降シリンダ82により上下回動作動させるようにしている。刈取フレーム3は、左右方向に伸延する円筒状の第1フレーム形成片83と、前後方向に伸延する円筒状の第2フレーム形成片84と、左右方向に伸延する円筒状の第3フレーム形成片85とから形成している。第1フレーム形成片83は、左右に対向する左・右側支持体79,81間に、第1フレーム形成片83をその軸線廻りに回動自在に横架している。第2フレーム形成片84は、第1フレーム形成片83の中途部に基端部を直交状態に連通連設し、先端部に第3フレーム形成片85の中途部を直交状態に連通連設している。そして、第1〜第3フレーム形成片83,84,85中にはそれぞれ第1・第2・第3伝動軸75,76,77を軸架するとともに相互に連動連結して刈取連動機構78を形成している。刈取連動機構78は搬送部5等の駆動部に動力を伝達するようにしている。昇降シリンダ82は、機体フレーム50の前端部と第2フレーム形成片84の中途部との間に介設している。左側支持体79の上半部は左側支持体79の軸線廻りに回動自在となして、刈取部4を左側外方へ回動移動可能となしている。
【0026】
また、左側支持体79の上端部と第1フレーム形成片83の左側端部との間には、回動ポテンショメータ式の昇降センサ86を介設して、機体本体2側である左側支持体79と刈取部4側である第1フレーム形成片83との同一軸線廻りの相対位置を検出することで、機体本体2と刈取部4との相対高さを検出するようにしている。
【0027】
図1に示すように、搬送部5の前側下部にはブラケット74を介して非接触式の刈高さセンサ131を設けて、刈取部4と地上面である圃場面Gとの対地高さを検出するようにしている。ここで、刈高さセンサ131には超音波センサを採用して、その発信器132の発信部と受信機133の受信部を圃場面Gに向けて配置している。
【0028】
図6は油圧回路の説明図であり、図6(a)は刈取部4を昇降させる昇降シリンダ82の油圧回路図、図6(b)はその他の機能部シリンダ、すなわち、ローリングシリンダ61とピッチングシリンダ71とオーガ12を昇降させるオーガシリンダ20の油圧回路図である。
【0029】
昇降シリンダ82は刈取部昇降油圧回路150を介して油圧ポンプP及びオイルタンクTに流体接続している。刈取部昇降油圧回路150には第1電磁弁151と第2電磁弁152と第3電磁弁153を設けている。そして、第1電磁弁151の一側部bを励磁することで、昇降シリンダ82を低速伸長作動可能としている。第1電磁弁151の一側部bを励磁するとともに、第2電磁弁152の他側部aを励磁することで、昇降シリンダ82を高速伸長作動可能としている。第3電磁弁153をONさせることで、昇降シリンダ82を低速短縮作動可能としている。第1電磁弁151の一側部bを励磁するとともに、第2電磁弁152の一側部bを励磁することで、昇降シリンダ82を高速短縮作動可能としている。
【0030】
機能部シリンダは機能部作動用油圧回路160を介して油圧ポンプP及びオイルタンクTに流体接続している。機能部作動用油圧回路160には第4〜第9電磁弁161〜166を設けている。そして、第4電磁弁161によりオーガシリンダ20とローリングシリンダ61及びピッチングシリンダ71への給油回路を切換可能として、第5〜9電磁弁162〜166によりオーガシリンダ20と左右ローリングシリンダ61と左右ピッチングシリンダ71への給油回路を切換可能としている。
【0031】
このように、昇降シリンダ82とその他の機能部シリンダはそれぞれ独立させて伸縮作動させることができる。したがって、昇降シリンダ82により刈取部4を昇降させるとともに、機体本体2を下降させる後述の下降復帰制御機能及び地上高制御機能を確保することができる。
【0032】
上記したローリング機構60とピッチング機構70と昇降機構80は、図7の機能ブロック図に示すように、マイクロコンピュータ等によって形成した作業コントローラ100により自動姿勢制御と刈高さ制御と下降復帰制御と地上高制御が行えるように構成している。作業コントローラ100は、各種演算処理や制御を実行するための中央処理装置(CPU)、制御プログラムを記憶させた読み出し専用メモリ(ROM)、各種検出値やデータ等を一時的に記憶させる随時読み書き可能メモリ(RAM)、作業コントローラ100の電源をOFFにしても記憶データを保持する不揮発性メモリ(フラッシュメモリ)、タイマー機能としてのクロック、インターフェイス、バス等を備えている。
【0033】
作業コントローラ100には、入力系の各種センサ及びスイッチ類を接続している。すなわち、作業コントローラ100には、ピッチング制御スイッチ28と、ローリング制御スイッチ29と、刈取部4によって刈り取った刈取穀稈を検出する穀稈センサ101と、刈取部4の作動を検出する作動センサ102と、機体本体2の左右方向の傾斜角度を検出する振り子式の左右傾斜センサ103と、機体本体2と左側の走行フレーム40との相対間隔(車高)を検出するポテンショメータ形の左車高センサ104と、機体本体2と右側の走行フレーム40との相対間隔(車高)を検出するポテンショメータ形の右車高センサ105と、左右傾斜設定器30を接続している。
【0034】
また、作業コントローラ100には、出力系の各種電磁油圧バルブを接続している。すなわち、作業コントローラ100には、左傾電磁弁110と右傾電磁弁111を接続している。このようにして、左右傾斜センサ103の検出値と左車高センサ104の検出値と右車高センサ105の検出値とに基づき、左傾電磁弁110又は右傾電磁弁111を切換えて、左車高を調節作動する左側ローリングシリンダ61又は右車高を調節作動する右側ローリングシリンダ61を伸縮作動させて、機体本体2の左右方向の傾斜を修正することで、機体本体2が略水平姿勢ないしは設定傾斜姿勢となるように自動姿勢制御する。
【0035】
そして、作業コントローラ100には、機体本体2の前後方向の傾斜角度を検出する振り子式の前後傾斜センサ120と、機体本体2の後部と走行フレーム40の後端側との相対間隔(走行フレーム40の前後方向の対本機傾斜角度)を検出するポテンショメータ形の本機傾斜センサ121と、機体本体2の前後方向の傾斜角度の基準値を初期設定する手動ダイヤル切換式ポテンショメータ形の前後傾斜設定器122を接続している。
【0036】
また、作業コントローラ100には、前後傾斜電磁弁123を接続している。このようにして、前後傾斜センサ120の検出値と本機傾斜センサ121の検出値と前後傾斜設定器122の設定値に基づき、前後傾斜電磁弁123を切換えて、機体本体2の前後傾斜を調節作動する左右側のピッチングシリンダ71を伸縮作動させて、機体本体2の前後方向の傾斜を修正することで、機体本体2が略水平姿勢となるように自動姿勢制御する。
【0037】
作業コントローラ100には、履帯43の回転速度(車速)を検出する車速センサ130と、刈取部4の対地高さを検出するポテンショメータ形の刈取高さセンサ131と、刈取部4の対地高さ基準値を初期設定する手動ダイヤル切換式ポテンショメータ形の刈高さ設定器33を接続している。
【0038】
また、作業コントローラ100には、刈取昇降電磁弁134を接続している。このようにして、車速センサ130の検出値と刈取高さセンサ131の検出値と刈高さ設定器33の設定値とに基づき、刈取昇降電磁弁134を切換えて、昇降シリンダ82を伸縮作動させることで、刈取部4の対地高さを修正して、刈取部4により穀稈刈取高さが略一定となるように刈高さ制御する。この際、刈高さセンサ131の発信器132には作業コントローラ100からの指令により発信駆動回路(図示せず)を介して適宜所定時間間隔にて超音波を発信し、圃場面等の非検出物に反射された反射波は受信器133で受信して、その検出信号は受信増幅回路(図示せず)を介して作業コントローラ100に入力される。前記昇降センサ86の検出信号もA/D変換器を介して上記所定時間間隔ごとに作業コントローラ100に入力される。刈高さ設定器33による設定値は、昇降センサ86の検出値における所定値に対応する。
【0039】
上記のように構成した本実施形態では、機体本体2と刈取部4の自動姿勢制御、刈高さ制御、下降復帰制御及び地上高制御が自動的になされる。
【0040】
自動姿勢制御では、機体本体2が所要の地上高にて略水平姿勢に保持されるように昇降制御とローリング制御とピッチング制御がなされ、刈高さ制御では、穀稈刈取高さが略一定となるように刈取部4の刈高さが制御され、作業終了操作がなされた際には自動姿勢制御及び刈高さ制御は終了となる。そして、自動的に機体本体2が略水平姿勢に復帰されながら設定位置まで下降復帰される下降復帰制御と、刈取部4の地上高が地上面(圃場面)よりも上方に保持される地上高制御が開始される。
【0041】
作業終了操作は、作業クラッチスイッチ32をOFFさせることで、脱穀クラッチが切断されて、エンジン14から脱穀部7へ伝達される動力が切断される操作である。その場合には、作業クラッチスイッチ32のOFF操作信号が作業コントローラ100に発信されることで、作業コントローラ100は作業終了操作なされたと判断して下降復帰制御と地上高制御を開始するようにプログラム制御している。
【0042】
下降復帰制御では、機体本体2が設定位置(本実施形態では最下降位置)まで略水平姿勢にて下降復帰されるように下降制御とローリング制御とピッチング制御がなされる。
【0043】
地上高制御では、刈取部4が地上面に接地しないように刈取部4を所定の地上高(例えば、数cm)に保つように昇降制御される。この際、刈取部4の昇降シリンダ82による上昇動作と機体本体2のローリングシリンダ61とピッチングシリンダ71による下降動作は同時進行で行われるようにしている。また、地上高制御は、機体本体2を設定位置まで下降させると刈取部4が地上面に衝突する場合にのみ刈取部4を上昇させて刈取部4の地上高を制御するようにしている。
【0044】
ここで、機体本体2を略水平姿勢に復帰させるローリング制御とピッチング制御を行うためのローリングシリンダ61及びピッチングシリンダ71を制御するための機能部作動用油圧回路160と、刈取部4を昇降させる昇降シリンダ82を制御するための刈取部昇降油圧回路150は、前記したようにそれぞれ個別に形成している。そうすることで、ローリングシリンダ61及びピッチングシリンダ71と昇降シリンダ82を適宜独立させて同時に伸縮作動させることができるようにしている。
【0045】
したがって、本実施形態では、機体本体2を略水平姿勢に復帰させながら最下位置まで下降させる下降復帰制御がなされるため、機体本体2の下降復帰を迅速に行うことができる。そして、同時に刈取部4の地上高を確保する地上高制御も堅実に行うことができる。
【0046】
図8は、自動モードのフローチャートである。脱穀スイッチがOFFされて、脱穀クラッチがOFFされると(S200;Yes)、作業終了操作がなされたと作業コントローラ100が判断して、下降復帰制御(S201)がなされる。刈取部4が所定の地上高よりも低位置にある場合には(S202;Yes)、地上高制御(S203)がなされる。また、刈取部4が所定の地上高よりも高位置にある場合や(S202;No)、刈取部4の地上高が所定の高さにない場合には(S204;No)、下降復帰制御(S201)が再開される。
【0047】
また、下降復帰制御は、機体本体2を略水平姿勢に復帰させた後に、最下位置まで下降させるようにすることもできる。この場合、機体本体2を略水平姿勢に復帰させた後に、最下位置まで下降させる下降復帰制御がなされるため、下降復帰制御と地上高制御をそれぞれ堅実に行うことができる。
【0048】
機体本体2を昇降させ、ローリングさせ、そして、ピッチングさせる前記ローリング機構60とピッチング機構70の構成を、図3及び図4を参照しながら具体的に説明する。
【0049】
すなわち、機体フレーム50の下面側に前後方向に伸延する左右一対のリンク支持体170を取り付けている。各リンク支持体170の前部に前部軸受体171を設ける一方、後部に後部軸受体172を設けている。各前・後部軸受体171,172には左右方向に軸芯を向けた前・後部リンク支軸173,174を貫通させている。
【0050】
各前部リンク支軸173の一側端には上下方向に伸延する上側前部ローリングアーム175の基端部を取り付けている。各前部リンク支軸173の他側端には前後方向に伸延する下側前部ローリングアーム176の基端部を取り付けている。このようにして、前部リンク支軸173を介して上・下側前部ローリングアーム175,176を一体回動自在に軸支している。また、各下側前部ローリングアーム176の先端部は走行フレーム40の前部に連結軸177を介して連結している。
【0051】
各後部リンク支軸174の一側端には上下方向に伸延する上側後部ローリングアーム178の基端部を回動可能に嵌合させて取り付けている。各上側前部ローリングアーム175の先端部と各上側後部ローリングアーム178の先端部とを、前後方向に伸延する連結ロッド180を介して連結している。各上側後部ローリングアーム178の先端と走行フレーム40の中途部との間にローリングシリンダ61を介設している。各後部リンク支軸174の他側端には前後方向に伸延する左右一対の下側後部ローリングアーム179の基端部を取り付けている。また、各下側後部ローリングアーム179の先端部はリンク181を介して走行フレーム40の後部に連結している。
【0052】
各後部リンク支軸174の一側端には前後方向に伸延するピッチングアーム182の基端部を取り付けている。このようにして、ピッチングアーム182と下側後部ローリングアーム179は後部リンク支軸174を介して一体回動自在に軸支している。各上側後部ローリングアーム178の先端と各ピッチングアーム182の先端部との間にはピッチングシリンダ71を介設している。
【0053】
上記のように構成して、ローリング機構60は、上・下側前部ローリングアーム175,176、上・下側後部ローリングアーム178,179、連結ロッド180及びリンク181を具備して、ローリングシリンダ61が伸縮作動することで、上・下側前部ローリングアーム175,176が前部リンク支軸173を中心にして一体回動するとともに、上・下側後部ローリングアーム178,179とピッチングアーム182とローリングシリンダ61が後部リンク支軸174を中心にして一体回動するようにしている。そして、ローリングシリンダ61が伸縮作動した際には、走行フレーム40に対して機体フレーム50の前後方向の傾斜角度を維持しながら、機体フレーム50と走行フレーム40の相対間隔を変化させる。左右の履帯43の沈下量が変化して機体フレーム50(機体本体2)が左右に傾動した場合、又は、オペレータが機体フレーム50(機体本体2)を左右に傾動させたい場合、ローリングシリンダ61の自動制御又は手動操作によって機体フレーム50(機体本体2)の左右方向の傾斜角度を変化させて、機体フレーム50(機体本体2)の左右方向の対地傾斜角度を略水平姿勢に保持させることができる。
【0054】
ピッチング機構70は、下側後部ローリングアーム179、リンク181及びピッチングアーム182を具備して、ピッチングシリンダ71が伸縮作動することで、下側後部ローリングアーム179とピッチングアーム182が後部リンク支軸174を中心にして一体回動して、リンク181を介して前部リンク支軸173を中心にして走行フレーム40を回動させるようにしている。そして、ピッチングシリンダ71が伸縮作動した際には、機体フレーム50の左右方向の傾斜角度を維持しながら、走行フレーム40に対して機体フレーム50の前後方向の傾斜角度を変化させる。左右の履帯43を移動させる走行路面が上り傾斜又は下り傾斜の斜面の場合、又はオペレータが機体フレーム50(機体本体2)を傾斜させたい場合、ピッチングシリンダ71の自動制御又は手動操作によって機体フレーム50(機体本体2)の前後方向の傾斜角度を変化させて、機体フレーム50(機体本体2)の前後方向の対地傾斜角度を略水平姿勢に保持させることができる。
【符号の説明】
【0055】
A コンバイン
1 走行部
2 機体本体
3 刈取フレーム
4 刈取部
60 ローリング機構
70 ピッチング機構
80 昇降機構
【特許請求の範囲】
【請求項1】
左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、
機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させたことを特徴とするコンバイン。
【請求項2】
前記地上高制御は、機体本体を設定位置まで下降させると刈取部が地上面に衝突する場合にのみ刈取部を上昇させて刈取部の地上高を制御するようにしたことを特徴とする請求項1記載のコンバイン。
【請求項3】
刈取部の上昇動作と機体本体の下降動作は同時進行で行われるようにしたことを特徴とする請求項1又は2記載のコンバイン。
【請求項1】
左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、
機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させたことを特徴とするコンバイン。
【請求項2】
前記地上高制御は、機体本体を設定位置まで下降させると刈取部が地上面に衝突する場合にのみ刈取部を上昇させて刈取部の地上高を制御するようにしたことを特徴とする請求項1記載のコンバイン。
【請求項3】
刈取部の上昇動作と機体本体の下降動作は同時進行で行われるようにしたことを特徴とする請求項1又は2記載のコンバイン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−10680(P2012−10680A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−153124(P2010−153124)
【出願日】平成22年7月5日(2010.7.5)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年7月5日(2010.7.5)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]