
コンバイン
【課題】複数顧客の各コンバインのトラブルの発生を適正に予知でき、各コンバインのメンテナンス作業性等を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段75に前記各センサ61〜67の検出内容を送信する送信手段72を設けたものである。
【解決手段】エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段75に前記各センサ61〜67の検出内容を送信する送信手段72を設けたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圃場に植立した穀稈を刈取って穀粒を収集するコンバイン、又は飼料用穀稈を刈取って飼料として収集する飼料コンバイン等のコンバインに係り、より詳しくは、エンジン又は脱穀装置又は刈取装置の作動状況を検出するコンバインに関するものである。
【背景技術】
【0002】
従来、コンバインは、エンジンを搭載した走行機体を備え、走行機体に左右一対の走行クローラを装設し、左右一対の走行クローラを駆動制御して圃場等を移動するように構成している。また、コンバインは、圃場に植立した未刈り穀稈の株元を刈刃装置によって切断し、穀稈搬送手段としての穀稈搬送装置によって脱穀装置にその穀稈を搬送し、脱穀装置によってその穀稈を脱穀して、穀粒を収集するように構成している(例えば、特許文献1参照)。また、従来、コンバインの作動状態を検出して、地上の所定場所に設置されたホストコンピュータに前記作動状態を送信する技術もある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−14639号公報
【特許文献2】特開平5−158537号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記従来技術では、刈取作業制御又は回向制御又は籾排出クラッチ制御又は停止制御又は走行制御などの収穫作業動作を遠隔制御し、前記各制御が行われる毎に、エンジン回転数又は変速位置又は走行速度・走行距離又は収穫作業位置などの作動状態を検出し、ホストコンピュータに前記作動状態を送信するから、ホストコンピュータに前記作動状態を記録して監視できるが、ホストコンピュータが設置される販売店等の管理場所において、顧客のコンバインの作動状況を簡単に把握できない。収穫作業中に発生するエンジン又は脱穀装置又は刈取装置の動作不良に対して簡単に対処できない。エンジン又は脱穀装置又は刈取装置のトラブルの発生を簡単に予知できない等の問題がある。また、販売店等が管理するコンバイン数が多くなると、前記各制御が行われる毎にホストコンピュータに送信されるデータ量が膨大な量になり、管理場所に設置されたホストコンピュータのデータ監視を簡単に簡略化できない等の問題がある。
【0005】
そこで、本願発明は、これらの現状を検討して改善を施したコンバインを提供しようとするものである。
【課題を解決するための手段】
【0006】
前記目的を達成するため、請求項1に係る発明のコンバインは、エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたものである。
【0007】
請求項2に記載の発明は、請求項1に記載のコンバインにおいて、前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたものである。
【0008】
請求項3に記載の発明は、請求項1に記載のコンバインにおいて、前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたものである。
【0009】
請求項4に記載の発明は、請求項1に記載のコンバインにおいて、前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたものである。
【0010】
請求項5に記載の発明は、請求項1に記載のコンバインにおいて、前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したものである。
【発明の効果】
【0011】
請求項1に係る発明によれば、エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたものであるから、販売店等の管理場所において、販売店等の管理者によって複数顧客の各コンバインの作動状況を一括して個別にそれぞれ把握できる。収穫作業中に発生する複数顧客の各コンバインのエンジン又は脱穀装置又は刈取装置の動作不良に対して速やかに対処できる。複数顧客の各コンバインのエンジン又は脱穀装置又は刈取装置のトラブルの発生を適正に予知できる。複数顧客の各コンバインのメンテナンス作業性等を向上できる。
【0012】
請求項2に係る発明によれば、前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記エンジンを一括して個別にそれぞれ管理でき、複数顧客の各コンバインのエンジントラブルの発生を低減できる。
【0013】
請求項3に係る発明によれば、前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記ベルトの劣化を一括して個別にそれぞれ予知でき、複数顧客の各コンバインのベルトトラブルが発生するのを未然に防止できる。
【0014】
請求項4に係る発明によれば、前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたものであるから、販売店等の管理場所において、複数顧客の各コンバインの前記引起タインの損傷有無を、販売店等の管理者が一括して個別にそれぞれ把握できる。例えば多数の引起タインのうちいずれか1本の引起タインが欠落した状態で、複数顧客のいずれかの刈取作業が実行される等の刈取トラブルを低減できる。
【0015】
請求項5に係る発明によれば、前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したものであるから、例えば、緊急の対処が必要な異常入力を除く、通常データ量(前記送信手段から送信されるデータ量)を簡単に制限でき、管理場所に設置された前記受信手段のデータ監視を簡略化できる。販売店等の管理場所において、販売店等の管理者が管理する複数顧客のコンバインデータを限定して受信でき、複数顧客のコンバインデータの取扱い性を向上できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態の6条刈り用コンバインの側面図である。
【図2】同平面図である。
【図3】同コンバインの駆動系統図である。
【図4】同コンバインに搭載するエンジンの斜視図である。
【図5】遠隔監視制御のブロック回路図である。
【図6】本機側遠隔監視制御のフローチャートである。
【図7】管理側遠隔監視制御のフローチャートである。
【発明を実施するための形態】
【0017】
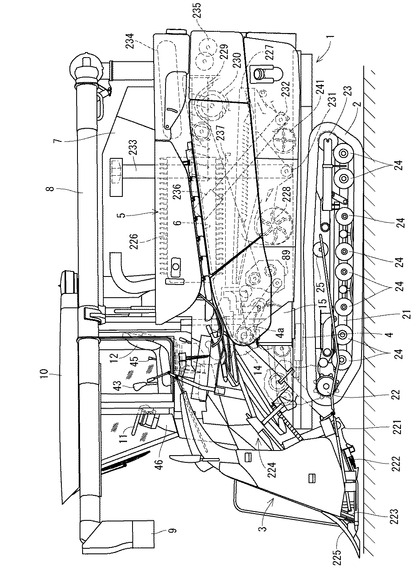
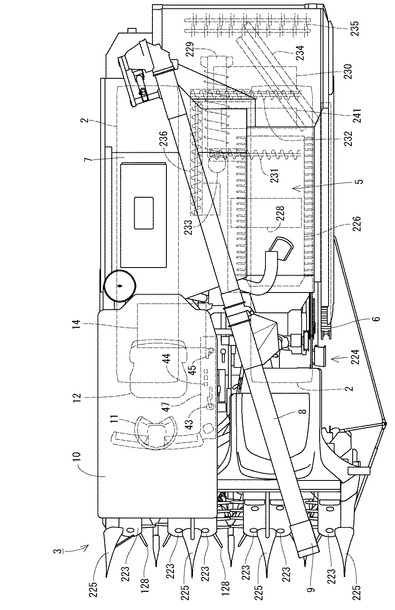
以下に、本発明を具体化した実施形態を図面に基づいて説明する。図1はコンバインの左側面図、図2はコンバインの平面図である。図1及び図2を参照して、コンバインの全体構造について説明する。なお、以下の説明では、走行機体1の前進方向に向かって左側を単に左側と称し、同じく前進方向に向かって右側を単に右側と称する。図1及び図2に示す如く、走行部としての左右一対の走行クローラ2にて支持された走行機体1を備える。走行機体1の前部には、穀稈を刈取りながら取込む6条刈り用の刈取装置3が、単動式の昇降用油圧シリンダ4によって刈取回動支点軸4a回りに昇降調節可能に装着される。走行機体1には、フィードチェン6を有する脱穀装置5と、該脱穀装置5から取出された穀粒を貯留する穀粒タンク7とが横並び状に搭載される。なお、脱穀装置5が走行機体1の前進方向左側に、穀粒タンク7が走行機体1の前進方向右側に配置される。走行機体1の後部に旋回可能な排出オーガ8が設けられ、穀粒タンク7の内部の穀粒が、排出オーガ8の籾投げ口9からトラックの荷台またはコンテナ等に排出されるように構成されている。刈取装置3の右側方で、穀粒タンク7の前側方には、運転キャビン10が設けられている。
【0018】
運転キャビン10内には、操縦ハンドル11と、運転座席12と、主変速レバー43と、副変速スイッチ44と、脱穀クラッチ及び刈取クラッチを入り切り操作する作業クラッチレバー45とを配置している。なお、運転キャビン10には、オペレータが搭乗するステップ(図示省略)と、操縦ハンドル11を設けたハンドルコラム46と、前記各レバー43,45及びスイッチ44等を設けたレバーコラム47とが配置されている。運転座席12の下方の走行機体1には、動力源としてのエンジン14が配置されている。
【0019】
図1に示す如く、走行機体1の下面側に左右のトラックフレーム21を配置している。トラックフレーム21には、走行クローラ2にエンジン14の動力を伝える駆動スプロケット22と、走行クローラ2のテンションを維持するテンションローラ23と、走行クローラ2の接地側を接地状態に保持する複数のトラックローラ24と、走行クローラ2の非接地側を保持する中間ローラ25とを設けている。駆動スプロケット22によって走行クローラ2の前側を支持し、テンションローラ23によって走行クローラ2の後側を支持し、トラックローラ24によって走行クローラ2の接地側を支持し、中間ローラ25によって走行クローラ2の非接地側を支持する。
【0020】
図1、図2に示す如く、刈取装置3の刈取回動支点軸4aに連結した刈取フレーム221の下方には、圃場に植立した未刈り穀稈(穀稈)の株元を切断するバリカン式の刈刃装置222が設けられている。刈取フレーム221の前方には、圃場に植立した未刈り穀稈を引起す6条分の穀稈引起装置223が配置されている。穀稈引起装置223とフィードチェン6の前端部(送り始端側)との間には、刈刃装置222によって刈取られた刈取り穀稈を搬送する穀稈搬送装置224が配置される。なお、穀稈引起装置223の下部前方には、圃場に植立した未刈り穀稈を分草する6条分の分草体225が突設されている。エンジン14にて走行クローラ2を駆動して圃場内を移動しながら、刈取装置3によって圃場に植立した未刈り穀稈を連続的に刈取る。
【0021】
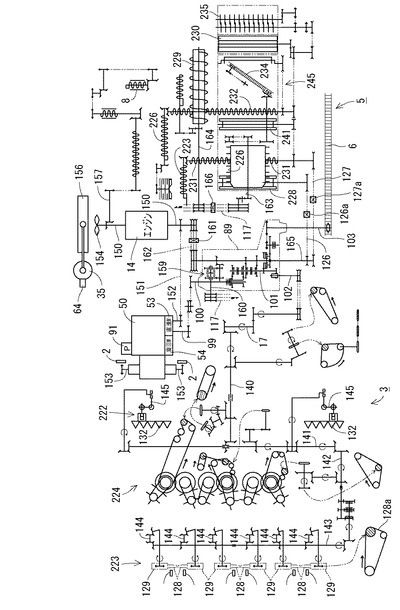
次に、図3を参照してコンバインの駆動構造を説明する。図3に示す如く、刈取り入力軸17に、縦伝動軸140及び横伝動軸141及び左搬送駆動軸142を介して引起横伝動軸143を連結する。引起横伝動軸143は、穀稈引起装置223に設けた6条分の各引起ケース129の引起タイン駆動軸144にそれぞれ連結している。分草体225の後方に引起ケース129が立設され、引起ケース129の上端側の背面から引起タイン駆動軸144を突出している。引起タイン駆動軸144及び引起横伝動軸143を介して、複数の引起タイン128を設けた引起タインチェン128aが駆動される。
【0022】
図3に示す如く、横伝動軸141に左右のクランク軸145を介して左右の刈刃132を連結する。横伝動軸141を介して左右の刈刃132を同期させて駆動するように構成している。なお、刈刃装置222は、6条分の刈幅の中央部で分割して左右の刈刃132を形成し、左右の刈刃132を相反する方向に往復移動させ、往復移動によって発生する左右の刈刃132の振動(慣性力)を相殺可能に構成している。
【0023】
また、刈取り入力軸17に刈取フレーム221内の縦伝動軸140の一端側を連結する。縦伝動軸140の他端側に横伝動軸141を連結する。縦伝動軸140及び横伝動軸141から穀稈搬送装置224の各駆動部に刈取り入力軸17の回転力を伝える。
【0024】
次に、図1及び図2を参照して、脱穀装置5の構造を説明する。図1及び図2に示す如く、脱穀装置5には、穀稈脱穀用の扱胴226と、扱胴226の下方に落下する脱粒物を選別する揺動選別盤227及び唐箕ファン228と、扱胴226の後部から取出される脱穀排出物を再処理する処理胴229と、揺動選別盤227の後部の排塵を排出する排塵ファン230を備えている。なお、扱胴226の回転軸芯線は、フィードチェン6による穀稈の搬送方向(換言すると走行機体1の進行方向)に沿って延びている。刈取装置3から穀稈搬送装置224によって搬送された穀稈の株元側は、フィードチェン6に受け継がれて挟持搬送される。そして、この穀稈の穂先側が脱穀装置5の扱室内に搬入されて扱胴226にて脱穀される。
【0025】
図1に示す如く、揺動選別盤227の下方側には、揺動選別盤227にて選別された穀粒(一番物)を取出す一番コンベヤ231と、枝梗付き穀粒等の二番物を取出す二番コンベヤ232とが設けられている。本実施形態の両コンベヤ231,232は、走行機体1の進行方向前側から一番コンベヤ231、二番コンベヤ232の順に横設されている。前記した揺動選別盤227と、唐箕ファン228と、一番コンベヤ231と、二番コンベヤ232と、排塵ファン230と、選別ファン241等によって、穀物選別機構245を構成している。
【0026】
扱胴226の下方に張設された受網237から漏下した脱穀物が、揺動選別盤227によって揺動選別(比重選別)されるように構成している。揺動選別盤227から落下した穀粒は、その穀粒中の粉塵が唐箕ファン228からの選別風によって除去され、一番コンベヤ231に落下する。一番コンベヤ231のうち脱穀装置5における穀粒タンク7寄りの一側壁(実施形態では右側壁)から外向きに突出した終端部には、上下方向に延びる揚穀コンベヤ233が連通接続されている。一番コンベヤ231から取出された穀粒は、揚穀コンベヤ233を介して穀粒タンク7に搬入され、穀粒タンク7に収集される。
【0027】
また、揺動選別盤227は、揺動選別(比重選別、唐箕風選別)によって枝梗付き穀粒等の二番物を二番コンベヤ232に落下させるように構成している。チャフシーブ239の下方に落下する二番物を風選する選別ファン241を備える。チャフシーブ239から落下した二番物は、その穀粒中の粉塵及び藁屑が選別ファン241からの選別風(唐箕風)によって除去され、二番コンベヤ232に落下する。二番コンベヤ232のうち脱穀装置5における穀粒タンク7寄りの一側壁から外向きに突出した終端部は、還元コンベヤ236を介して、揺動選別盤227の上面側の前部に連通接続され、二番物を揺動選別盤227の上面側に戻して再選別するように構成している。
【0028】
一方、図1及び図2に示す如く、フィードチェン6の後端側(送り終端側)には、排藁チェン234と排藁カッタ235が配置されている。フィードチェン6の後端側から排藁チェン234に受継がれた排藁(穀粒が脱粒された稈)は、長い状態で走行機体1の後方に排出されるか、又は脱穀装置5の後部に設けられた排藁カッタ235にて適宜長さに短く切断されたのち、走行機体1の後方下方に排出される。
【0029】
次に、図3を参照しながら、刈取装置3、脱穀装置5、フィードチェン6、排藁チェン234、排藁カッタ235等の駆動構造について説明する。図3に示す如く、エンジン14の左側にその出力軸150を突出する。エンジン14の出力軸150に走行駆動ベルト151を介してミッションケース50の走行入力軸152を連結し、エンジン14の回転駆動力が、前側の出力軸150からミッションケース50に伝達されて変速された後、左右の車軸153を介して左右の走行クローラ2に伝達され、左右の走行クローラ2がエンジン14の回転力によって駆動されるように構成している。
【0030】
図3に示す如く、エンジン14を冷却するためのラジエータ156用の冷却ファン154が、エンジン14の右側に突出した出力軸150に設けられている。また、エンジン14の右側の出力軸150に排出オーガ駆動軸157を連結し、エンジン14の回転駆動力によって排出オーガ駆動軸157を介して排出オーガ8が駆動され、穀粒タンク7内の穀粒がトラック荷台又はコンテナ等に排出されるように構成している。
【0031】
次に、図3を参照して、カウンタケース(ギヤケース)95等の動力伝達構造を説明する。図3に示す如く、脱穀装置5の各部にエンジン14の回転駆動力を伝える脱穀選別作業入力軸165と、扱胴226及び処理胴230に脱穀選別作業入力軸165の回転駆動力を伝える扱胴駆動軸160を備える。エンジン14の左側の出力軸150には、テンションローラ形脱穀クラッチ161及び脱穀駆動ベルト162を介して、脱穀選別作業入力軸165を連結する。扱胴駆動軸160上に、扱胴変速ギヤ機構159を配置する。脱穀選別作業入力軸165の回転力が、扱胴変速ギヤ機構159を介して扱胴駆動軸160に伝達される。
【0032】
また、図3に示す如く、扱胴駆動軸160には、扱胴駆動ベルト117及び扱胴ベルトテンションローラ166を介して、扱胴226を軸支した扱胴軸163と、処理胴229を軸支した処理胴軸164とを連結する。エンジン14の略一定回転数の回転力によって、扱胴226及び処理胴229が所定回転数(低速回転数又は高速回転数)で回転するように構成している。また、エンジン14の略一定回転数の回転力によって、脱穀選別作業入力軸165を介して、揺動選別盤227、唐箕ファン228、一番コンベヤ231、二番コンベヤ232、選別ファン241、排塵ファン230等の穀物選別機構245が略一定回転数で回転駆動されるように構成している。
【0033】
図1、図3に示す如く、エンジン14の左側方で、脱穀装置5の前側方の走行機体1上に、カウンタケース95を設けている。カウンタケース95には、上述した扱胴駆動軸160と、扱胴駆動軸160に連結する脱穀選別作業入力軸165と、PTO軸99に連結する車速同調軸100と、脱穀選別作業入力軸165又は車速同調軸100に変速ギヤを介して連結する刈取伝動軸101と、刈取り入力軸17に刈取伝動軸101を連結する刈取駆動軸102と、フィードチェン6を駆動するフィードチェン駆動軸103とを配置している。脱穀駆動ベルト162を介して、エンジン14の出力軸15が脱穀選別作業入力軸165に連結されている。刈取装置3及び脱穀装置5に脱穀選別作業入力軸165から一定回転数の刈取駆動力及び脱穀駆動力を伝達させる。ミッションケース50のPTO軸99が車速同調軸100に連結され、カウンタケース95にPTO軸99から車速同調駆動力を伝達させ、車速と同調して回転数が変更される刈取駆動力(車速同調駆動力)によって刈取装置3を駆動する。
【0034】
また、唐箕駆動用のベルト126及びテンションローラ126aを介して、脱穀選別作業入力軸165が唐箕ファン228に連結される。選別駆動用のベルト127及びテンションローラ127aを介して、脱穀選別作業入力軸165が一番コンベヤ231等に連結される。脱穀装置5の穀物選別機構245(唐箕ファン228等)の各部に脱穀選別作業入力軸165から穀物選別駆動力を伝達させる。また、脱穀選別作業入力軸165にフィードチェン駆動軸103を連結して、フィードチェン6を車速と同調させて作動するように構成している。
【0035】
さらに、図3に示す如く、ミッションケース50に、1対の直進用第1油圧ポンプ及び直進用第1油圧モータを有する直進(走行主変速)用の油圧式無段変速機構53と、1対の旋回用第2油圧ポンプ及び旋回用第2油圧モータを有する旋回用の油圧式無段変速機構54とを設ける。前記第1油圧ポンプ及び第2油圧ポンプの各ポンプ軸に、ミッションケース50の走行入力軸152をそれぞれ連結させて駆動するように構成している。走行入力軸152に走行駆動ベルト151を介してエンジン14の出力を伝達する。また、ミッションケース50にPTO軸99を配置し、PTO軸99に車速同調軸100を連結している。
【0036】
左右の車軸153には左右の駆動スプロケット22が取付けられている。従って、直進用の油圧式無段変速機構53の変速回転動力は、左右の車軸153から各駆動スプロケット22に同方向の同一回転数にて伝達され、左右の走行クローラ2を同方向の同一回転数にて駆動して、走行機体1を直進(前進、後退)移動させる。一方、旋回用油圧式無段変速機構54の回転動力は、左右の走行クローラ2の駆動スプロケット22のうち、一方が前進回転し、他方が後退回転し、走行機体1はその場で方向転換(信地旋回スピンターン)される。即ち、走行機体1は前進又は後退しながら信地旋回半径より大きい旋回半径で左又は右に旋回しながら、走行機体1を前進方向又は後退方向に移動させる。
【0037】
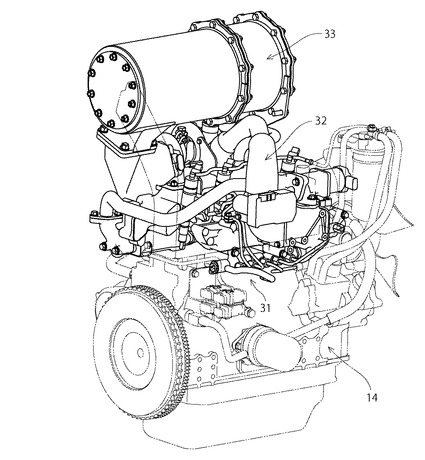
次に、図4を参照して、前記エンジン14の燃料噴射構造と、吸気及び排気構造について説明する。前記エンジン14は、ディーゼルエンジンにて構成されている。図4に示す如く、前記エンジン14には、コモンレール式燃料噴射機構31と、排気ガス再循環機構32と、排気ガス浄化機構33が付設されている。コモンレール式燃料噴射機構31は、高圧化した燃料を蓄え、エンジン14の各インジェクタにその燃料を供給するもので、電子制御によって燃料の噴射圧力、噴射時期、噴射期間(噴射量)を高精度でコントロールするように構成している。
【0038】
また、排気ガス再循環機構32は、燃焼後の排気ガスの一部を取出して吸気側に還流させるもので、排気ガス中の窒素酸化物を低減し、かつエンジンの燃費を向上するように構成している。また、排気ガス浄化機構33は、排気ガス中の粒子状物質を捕捉するフィルタと、排気ガス中の窒素酸化物をより二酸化窒素の多い状態にする酸化触媒を有し、二酸化窒素の酸化性能によって粒子状物質を燃焼する連続再生機能を有するもので、ディーゼルエンジン14から排出される排気ガス中の粒子状物質を減少させるように構成している。さらに、ラジエータ156には、エンジン14冷却用の冷却水を補給する冷却水タンクが付設されている。
【0039】
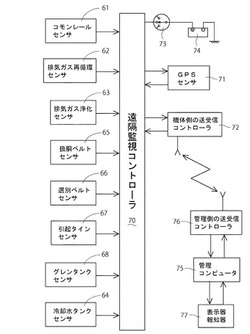
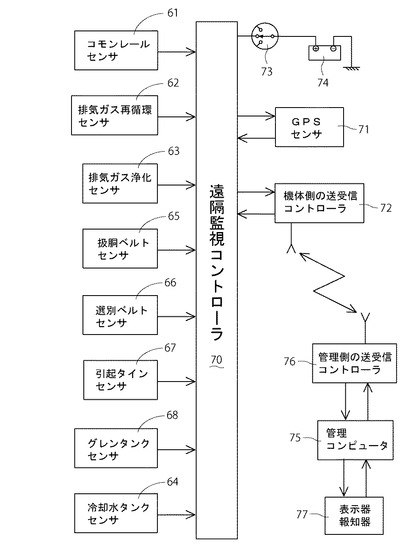
次に、図5、図6、図7を参照して、例えばメーカー単位又は販売店単位で販売管理する多数のコンバインの作動状況を一括して把握する遠隔監視制御回路及び制御態様を説明する。図5は、特定のコンバインの作動状況を、販売管理する販売店側で確認する制御回路であり、図5に示す如く、エンジン14の作動状況を検出するセンサとして、コモンレール式燃料噴射機構31の異常を検出するコモンレールセンサ61と、排気ガス再循環機構32の異常を検出する排気ガス再循環センサ62と、排気ガス浄化機構33の異常を検出する排気ガス浄化センサ63と、ラジエータ156に冷却水を補給する冷却水タンク35の残水量を検出する冷却水タンクセンサ64とを設ける。
【0040】
また、脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルト117の緊張力状態を検出する扱胴ベルトセンサ65と、選別駆動ベルト127の緊張力状態を検出する選別ベルトセンサ66を設ける。扱胴ベルトセンサ65と選別ベルトセンサ66は、唐箕駆動用のテンションローラ126a又は選別駆動用のテンションローラ127aの支持位置を検知するポテンショメータによって、扱胴駆動ベルト117又は選別駆動ベルト127の緊張力状態をそれぞれ検出するように構成している。
【0041】
また、刈取装置の作動状況を検出するセンサとして、引起タイン128の損傷有無状態を検出する引起タインセンサ67を設ける。引起タインセンサ67は、引起ケース129に引起タインチェン128aを介して設けられた複数の引起タイン128のうち、少なくとも1本が欠落したか否かを検知する接触式又は非接触式のスイッチによって、引起タイン128の損傷有無状態を検出するように構成している。
【0042】
図5に示す如く、前記コモンレールセンサ61と、排気ガス浄化センサ63と、冷却水タンクセンサ64と、扱胴ベルトセンサ65と、選別ベルトセンサ66と、引起タインセンサ67と、排出オーガ8によって排出されている穀粒の詰りを検出するグレンタンクセンサ68とを、マイクロコンピュータで形成する遠隔監視コントローラ70に入力接続する。コンバインの走行機体1に、遠隔監視コントローラ70と、コンバインの現在位置を検知するGPSセンサ(衛星測位システム)71と、遠隔監視コントローラ70の検知データ又はGPSセンサ(衛星測位システム)71の測位検知データを送信する機体側の送受信コントローラ72を搭載している。また、エンジン14を始動又は停止させるキースイッチ73を介して、遠隔監視コントローラ70にバッテリ74を接続している。
【0043】
また、図5に示す如く、販売店等の集中管理場所に設置する管理コンピュータ75を備える。機体側の送受信コントローラ72の送信データを受信する管理側の送受信コントローラ76と、表示器及び報知器を有するディスプレイシステム77を、管理コンピュータ75に接続している。販売店(メーカー)等の集中管理場所に設置された受信手段としての管理コンピュータ75に、前記各センサ61〜68の検出内容を送信する送信手段としての機体側の送受信コントローラ72を設けている。
【0044】
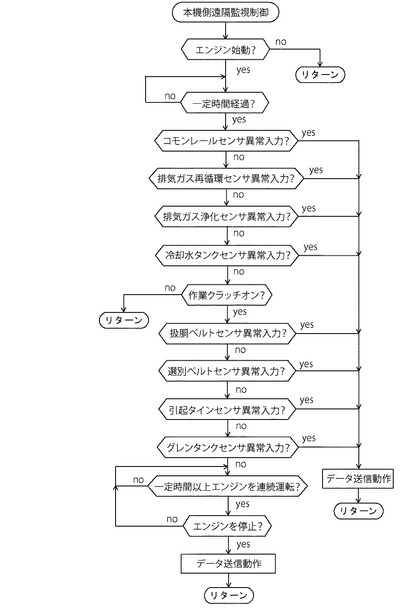
即ち、図6の本機側遠隔監視制御、図7の管理側遠隔監視制御のフローチャートに示す如く、遠隔監視制御が実行される。図6に示す如く、先ず、キースイッチ411がオン操作されてエンジン14が始動され、一定時間が経過したとき、前記コモンレールセンサ61値と、排気ガス浄化センサ63値と、冷却水タンクセンサ値64が、遠隔監視コントローラ70に読み込まれる。また、オペレータによって作業クラッチレバー45が入り操作されて、作業クラッチがオンのときに、扱胴ベルトセンサ65値と、選別ベルトセンサ66値と、引起タインセンサ67値と、グレンタンクセンサ68値とが、遠隔監視コントローラ70に読み込まれる。なお、エンジン14は、半固定状態のアクセルレバー(図示省略)の設定によって一定回転で定格運転され、刈取穀稈を脱穀する収穫作業が開始される。
【0045】
前記各センサ61〜68値のいずれかが異常入力のときには、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値のいずれかの異常入力が送信される。また、エンジン14が一定回転で定格運転されて収穫作業が実行され、一定時間以上に亘ってエンジン14を連続して運転した後、キースイッチ73の操作によってエンジン14を停止させたときに、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値の全てのデータが送信される。
【0046】
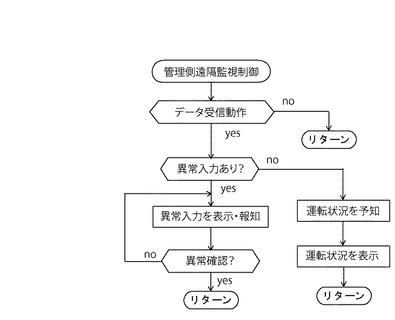
図7に示す如く、機体側の送受信コントローラ72の送信データ(前記各センサ61〜68値)が、管理側の送受信コントローラ76に受信され、管理コンピュータ75に記録される。機体側の送受信コントローラ72から送信された前記各センサ61〜68値のいずれかの異常入力が、管理側の送受信コントローラ76に受信され、管理コンピュータ75に記録された場合、ディスプレイシステム77に表示されて、ブザーの鳴動等によって管理者に報知される。管理者が前記各センサ61〜68値の異常入力の受信を確認するまで、その異常入力の受信がディスプレイシステム77に表示されて、管理者に報知するブザーの鳴動等が継続される。
【0047】
また、管理者が前記各センサ61〜68値の異常入力の受信を確認したときに、GPSセンサ71の位置情報によって前記異常入力のコンバインの現在位置と使用機種名がディスプレイシステム77に表示される。したがって、前記使用者がコンバインの異常発生を認知して電話等によって管理者に知らせる前に、管理者側から電話等によって前記使用者に前記異常入力の発生を知らせ、前記異常入力に早期に対応して、前記異常入力の発生に伴う事故の発生又は損害を低減すると同時に、前記異常入力に応じて管理者が部品等を用意して、前記異常入力が発生したコンバインの所在位置に管理者が速やかに移動でき、前記コンバインの異常に対して適正に対処できる。例えば、従来のように、使用者からトラブル発生の連絡があったときに、使用者の現在位置に管理者が移動して、管理者がコンバインの異常を確認してから、管理者が販売店等に戻り、管理者が部品等を調達して使用者の現在位置に再び移動して、前記コンバインに対して対処する必要がない。即ち、販売店等とコンバインの所在位置とを管理者が往復移動して、部品等を調達する作業手間を不要にすることができる。その結果、前記異常入力の原因を早期に取除く処理ができ、収穫作業の中断時間(前記異常入力の原因を解除する時間)を短縮できる。
【0048】
さらに、キースイッチ73の操作によってエンジン14を停止させたときに、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値の全ての遠隔監視データが送信された場合、それらの遠隔監視データに基づき、コモンレール式燃料噴射機構31又は排気ガス再循環機構32又は排気ガス浄化機構33のメンテナンス時期、冷却水タンク35への冷却水の補給時期、扱胴駆動ベルト117又は選別駆動ベルト127の交換時期を演算にて推定する運転状況の予知制御が実行され、前記各時期の予測データ等の運転状況をディスプレイシステム77に表示する。
【0049】
即ち、前記各時期の予測データ等の運転状況を管理者が視認して、速やかに対処できるようにディスプレイシステム77に表示される。その結果、コモンレール式燃料噴射機構31又は排気ガス再循環機構32又は排気ガス浄化機構33のトラブル発生、冷却水タンク35の冷却水不足、扱胴駆動ベルト117又は選別駆動ベルト127の切断などを未然に阻止できる。また、キースイッチ73の操作によってエンジン14を停止させたときに、該当コンバインのデータが管理コンピュータ75に送信されるから、特定のコンバインから管理コンピュータ75に送信される遠隔監視データ量を簡単に制限でき、メーカー単位又は販売店単位で販売管理する多数のコンバインの作動状況を一括して把握する管理者の遠隔監視の作業性を向上できる。
【0050】
図1、図3、図5、図6、図7に示す如く、エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段としての管理コンピュータ75に前記各センサ61〜67の検出内容を送信する送信手段としての機体側の送受信コントローラ72を設けたものであるから、販売店等の管理場所において、販売店等の管理者によって複数顧客の各コンバインの作動状況を一括して個別にそれぞれ把握できる。即ち、収穫作業中に発生する複数顧客の各コンバインのエンジン14又は脱穀装置5又は刈取装置3の動作不良に対して速やかに対処できる。また、複数顧客の各コンバインのエンジン14又は脱穀装置5又は刈取装置3のトラブルの発生を適正に予知できる。したがって、複数顧客の各コンバインのメンテナンス作業性等を向上できる。
【0051】
なお、例えばGPSセンサ71の位置情報等を利用して、前記異常入力のコンバインの現在位置と使用機種名を判明させるように構成した場合、前記異常入力のコンバインの現在位置と使用機種名が販売店等の管理者によって簡単に確認できるから、前記異常入力に応じて管理者が部品等を用意して、前記異常入力が発生したコンバインの所在位置に管理者が速やかに移動でき、前記コンバインの異常に対して適正に対処できる。前記異常入力の原因を早期に解消でき、従来に比べて、前記コンバインの運転を中断する時間(例えば収穫作業の中断時間等)を短縮できる。
【0052】
図4、図5、図6、図7に示す如く、エンジン14の作動状況を検出するセンサとして、コモンレール式燃料噴射機構31の異常を検出するコモンレールセンサ61、又は排気ガス再循環機構32の異常を検出する排気ガス再循環センサ62、又は排気ガス浄化機構33の異常を検出する排気ガス浄化センサ63、又はラジエータ156に冷却水を補給する冷却水タンク35の残水量を検出する冷却水タンクセンサ64を設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインのエンジン14を一括して個別にそれぞれ管理でき、複数顧客の各コンバインのエンジントラブルの発生を低減できる。
【0053】
図3、図5、図6、図7に示す如く、脱穀装置5の作動状況を検出するセンサとして、扱胴駆動ベルト117の緊張力状態を検出する扱胴ベルトセンサ65、又は選別駆動ベルト127の緊張力状態を検出する選別ベルトセンサ66を設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記ベルト117,127の劣化を一括して個別にそれぞれ予知でき、複数顧客の各コンバインのベルトトラブルが発生するのを未然に防止できる。なお、前記ベルト117,127と同様に、走行駆動ベルト151又は脱穀駆動ベルト162の緊張力状態を検出して、各ベルト151,162の劣化を一括して個別にそれぞれ予知することも容易に行える。
【0054】
図3、図5、図6、図7に示す如く、刈取装置3の作動状況を検出するセンサとして、引起タイン128の損傷有無状態を検出する引起タインセンサ67を設けたものであるから、販売店等の管理場所において、複数顧客の各コンバインの引起タイン128の損傷有無を、販売店等の管理者が一括して個別にそれぞれ把握できる。例えば多数の引起タイン128のうちいずれか1本の引起タイン128が欠落した状態で、複数顧客のいずれかの刈取作業が実行される等の刈取トラブルを低減できる。なお、前記引起タイン128と同様に、穀稈搬送装置224の穂先搬送タインの損傷有無状態を検出して、前記穂先搬送タインの劣化を一括して個別にそれぞれ予知することも容易に行える。
【0055】
図3、図5、図6、図7に示す如く、エンジン14を一定時間以上に亘って連続して運転したときに、エンジン14を停止することによって、前記各センサ61〜67の検出内容を機体側の送受信コントローラ72から自動的に送信するように構成したものであるから、例えば、緊急の対処が必要な異常入力を除く、通常データ量(前記送信手段から送信されるデータ量)を簡単に制限でき、管理場所に設置された管理コンピュータ75のデータ監視を簡略化できる。販売店等の管理場所において、販売店等の管理者が管理する複数顧客のコンバインデータを限定して受信でき、複数顧客のコンバインデータの取扱い性を向上できる。なお、販売店等の管理者が管理コンピュータ75から指令を出すことによって、前記各センサ61〜67の検出内容を機体側の送受信コントローラ72から管理コンピュータ75に送信させることも容易に行える。
【符号の説明】
【0056】
1 走行機体
3 刈取装置
5 脱穀装置
14 エンジン
31 コモンレール式燃料噴射機構
32 排気ガス再循環機構
33 排気ガス浄化機構
35 冷却水タンク
61 コモンレールセンサ
62 排気ガス再循環センサ
63 排気ガス浄化センサ
64 冷却水タンクセンサ
65 扱胴ベルトセンサ
66 選別ベルトセンサ
67 引起タインセンサ
72 機体側の送受信コントローラ(送信手段)
75 管理コンピュータ(受信手段)
117 扱胴駆動ベルト
127 選別駆動ベルト
128 引起タイン
156 ラジエータ
226 扱胴
【技術分野】
【0001】
本発明は、圃場に植立した穀稈を刈取って穀粒を収集するコンバイン、又は飼料用穀稈を刈取って飼料として収集する飼料コンバイン等のコンバインに係り、より詳しくは、エンジン又は脱穀装置又は刈取装置の作動状況を検出するコンバインに関するものである。
【背景技術】
【0002】
従来、コンバインは、エンジンを搭載した走行機体を備え、走行機体に左右一対の走行クローラを装設し、左右一対の走行クローラを駆動制御して圃場等を移動するように構成している。また、コンバインは、圃場に植立した未刈り穀稈の株元を刈刃装置によって切断し、穀稈搬送手段としての穀稈搬送装置によって脱穀装置にその穀稈を搬送し、脱穀装置によってその穀稈を脱穀して、穀粒を収集するように構成している(例えば、特許文献1参照)。また、従来、コンバインの作動状態を検出して、地上の所定場所に設置されたホストコンピュータに前記作動状態を送信する技術もある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−14639号公報
【特許文献2】特開平5−158537号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記従来技術では、刈取作業制御又は回向制御又は籾排出クラッチ制御又は停止制御又は走行制御などの収穫作業動作を遠隔制御し、前記各制御が行われる毎に、エンジン回転数又は変速位置又は走行速度・走行距離又は収穫作業位置などの作動状態を検出し、ホストコンピュータに前記作動状態を送信するから、ホストコンピュータに前記作動状態を記録して監視できるが、ホストコンピュータが設置される販売店等の管理場所において、顧客のコンバインの作動状況を簡単に把握できない。収穫作業中に発生するエンジン又は脱穀装置又は刈取装置の動作不良に対して簡単に対処できない。エンジン又は脱穀装置又は刈取装置のトラブルの発生を簡単に予知できない等の問題がある。また、販売店等が管理するコンバイン数が多くなると、前記各制御が行われる毎にホストコンピュータに送信されるデータ量が膨大な量になり、管理場所に設置されたホストコンピュータのデータ監視を簡単に簡略化できない等の問題がある。
【0005】
そこで、本願発明は、これらの現状を検討して改善を施したコンバインを提供しようとするものである。
【課題を解決するための手段】
【0006】
前記目的を達成するため、請求項1に係る発明のコンバインは、エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたものである。
【0007】
請求項2に記載の発明は、請求項1に記載のコンバインにおいて、前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたものである。
【0008】
請求項3に記載の発明は、請求項1に記載のコンバインにおいて、前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたものである。
【0009】
請求項4に記載の発明は、請求項1に記載のコンバインにおいて、前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたものである。
【0010】
請求項5に記載の発明は、請求項1に記載のコンバインにおいて、前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したものである。
【発明の効果】
【0011】
請求項1に係る発明によれば、エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたものであるから、販売店等の管理場所において、販売店等の管理者によって複数顧客の各コンバインの作動状況を一括して個別にそれぞれ把握できる。収穫作業中に発生する複数顧客の各コンバインのエンジン又は脱穀装置又は刈取装置の動作不良に対して速やかに対処できる。複数顧客の各コンバインのエンジン又は脱穀装置又は刈取装置のトラブルの発生を適正に予知できる。複数顧客の各コンバインのメンテナンス作業性等を向上できる。
【0012】
請求項2に係る発明によれば、前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記エンジンを一括して個別にそれぞれ管理でき、複数顧客の各コンバインのエンジントラブルの発生を低減できる。
【0013】
請求項3に係る発明によれば、前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記ベルトの劣化を一括して個別にそれぞれ予知でき、複数顧客の各コンバインのベルトトラブルが発生するのを未然に防止できる。
【0014】
請求項4に係る発明によれば、前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたものであるから、販売店等の管理場所において、複数顧客の各コンバインの前記引起タインの損傷有無を、販売店等の管理者が一括して個別にそれぞれ把握できる。例えば多数の引起タインのうちいずれか1本の引起タインが欠落した状態で、複数顧客のいずれかの刈取作業が実行される等の刈取トラブルを低減できる。
【0015】
請求項5に係る発明によれば、前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したものであるから、例えば、緊急の対処が必要な異常入力を除く、通常データ量(前記送信手段から送信されるデータ量)を簡単に制限でき、管理場所に設置された前記受信手段のデータ監視を簡略化できる。販売店等の管理場所において、販売店等の管理者が管理する複数顧客のコンバインデータを限定して受信でき、複数顧客のコンバインデータの取扱い性を向上できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態の6条刈り用コンバインの側面図である。
【図2】同平面図である。
【図3】同コンバインの駆動系統図である。
【図4】同コンバインに搭載するエンジンの斜視図である。
【図5】遠隔監視制御のブロック回路図である。
【図6】本機側遠隔監視制御のフローチャートである。
【図7】管理側遠隔監視制御のフローチャートである。
【発明を実施するための形態】
【0017】
以下に、本発明を具体化した実施形態を図面に基づいて説明する。図1はコンバインの左側面図、図2はコンバインの平面図である。図1及び図2を参照して、コンバインの全体構造について説明する。なお、以下の説明では、走行機体1の前進方向に向かって左側を単に左側と称し、同じく前進方向に向かって右側を単に右側と称する。図1及び図2に示す如く、走行部としての左右一対の走行クローラ2にて支持された走行機体1を備える。走行機体1の前部には、穀稈を刈取りながら取込む6条刈り用の刈取装置3が、単動式の昇降用油圧シリンダ4によって刈取回動支点軸4a回りに昇降調節可能に装着される。走行機体1には、フィードチェン6を有する脱穀装置5と、該脱穀装置5から取出された穀粒を貯留する穀粒タンク7とが横並び状に搭載される。なお、脱穀装置5が走行機体1の前進方向左側に、穀粒タンク7が走行機体1の前進方向右側に配置される。走行機体1の後部に旋回可能な排出オーガ8が設けられ、穀粒タンク7の内部の穀粒が、排出オーガ8の籾投げ口9からトラックの荷台またはコンテナ等に排出されるように構成されている。刈取装置3の右側方で、穀粒タンク7の前側方には、運転キャビン10が設けられている。
【0018】
運転キャビン10内には、操縦ハンドル11と、運転座席12と、主変速レバー43と、副変速スイッチ44と、脱穀クラッチ及び刈取クラッチを入り切り操作する作業クラッチレバー45とを配置している。なお、運転キャビン10には、オペレータが搭乗するステップ(図示省略)と、操縦ハンドル11を設けたハンドルコラム46と、前記各レバー43,45及びスイッチ44等を設けたレバーコラム47とが配置されている。運転座席12の下方の走行機体1には、動力源としてのエンジン14が配置されている。
【0019】
図1に示す如く、走行機体1の下面側に左右のトラックフレーム21を配置している。トラックフレーム21には、走行クローラ2にエンジン14の動力を伝える駆動スプロケット22と、走行クローラ2のテンションを維持するテンションローラ23と、走行クローラ2の接地側を接地状態に保持する複数のトラックローラ24と、走行クローラ2の非接地側を保持する中間ローラ25とを設けている。駆動スプロケット22によって走行クローラ2の前側を支持し、テンションローラ23によって走行クローラ2の後側を支持し、トラックローラ24によって走行クローラ2の接地側を支持し、中間ローラ25によって走行クローラ2の非接地側を支持する。
【0020】
図1、図2に示す如く、刈取装置3の刈取回動支点軸4aに連結した刈取フレーム221の下方には、圃場に植立した未刈り穀稈(穀稈)の株元を切断するバリカン式の刈刃装置222が設けられている。刈取フレーム221の前方には、圃場に植立した未刈り穀稈を引起す6条分の穀稈引起装置223が配置されている。穀稈引起装置223とフィードチェン6の前端部(送り始端側)との間には、刈刃装置222によって刈取られた刈取り穀稈を搬送する穀稈搬送装置224が配置される。なお、穀稈引起装置223の下部前方には、圃場に植立した未刈り穀稈を分草する6条分の分草体225が突設されている。エンジン14にて走行クローラ2を駆動して圃場内を移動しながら、刈取装置3によって圃場に植立した未刈り穀稈を連続的に刈取る。
【0021】
次に、図3を参照してコンバインの駆動構造を説明する。図3に示す如く、刈取り入力軸17に、縦伝動軸140及び横伝動軸141及び左搬送駆動軸142を介して引起横伝動軸143を連結する。引起横伝動軸143は、穀稈引起装置223に設けた6条分の各引起ケース129の引起タイン駆動軸144にそれぞれ連結している。分草体225の後方に引起ケース129が立設され、引起ケース129の上端側の背面から引起タイン駆動軸144を突出している。引起タイン駆動軸144及び引起横伝動軸143を介して、複数の引起タイン128を設けた引起タインチェン128aが駆動される。
【0022】
図3に示す如く、横伝動軸141に左右のクランク軸145を介して左右の刈刃132を連結する。横伝動軸141を介して左右の刈刃132を同期させて駆動するように構成している。なお、刈刃装置222は、6条分の刈幅の中央部で分割して左右の刈刃132を形成し、左右の刈刃132を相反する方向に往復移動させ、往復移動によって発生する左右の刈刃132の振動(慣性力)を相殺可能に構成している。
【0023】
また、刈取り入力軸17に刈取フレーム221内の縦伝動軸140の一端側を連結する。縦伝動軸140の他端側に横伝動軸141を連結する。縦伝動軸140及び横伝動軸141から穀稈搬送装置224の各駆動部に刈取り入力軸17の回転力を伝える。
【0024】
次に、図1及び図2を参照して、脱穀装置5の構造を説明する。図1及び図2に示す如く、脱穀装置5には、穀稈脱穀用の扱胴226と、扱胴226の下方に落下する脱粒物を選別する揺動選別盤227及び唐箕ファン228と、扱胴226の後部から取出される脱穀排出物を再処理する処理胴229と、揺動選別盤227の後部の排塵を排出する排塵ファン230を備えている。なお、扱胴226の回転軸芯線は、フィードチェン6による穀稈の搬送方向(換言すると走行機体1の進行方向)に沿って延びている。刈取装置3から穀稈搬送装置224によって搬送された穀稈の株元側は、フィードチェン6に受け継がれて挟持搬送される。そして、この穀稈の穂先側が脱穀装置5の扱室内に搬入されて扱胴226にて脱穀される。
【0025】
図1に示す如く、揺動選別盤227の下方側には、揺動選別盤227にて選別された穀粒(一番物)を取出す一番コンベヤ231と、枝梗付き穀粒等の二番物を取出す二番コンベヤ232とが設けられている。本実施形態の両コンベヤ231,232は、走行機体1の進行方向前側から一番コンベヤ231、二番コンベヤ232の順に横設されている。前記した揺動選別盤227と、唐箕ファン228と、一番コンベヤ231と、二番コンベヤ232と、排塵ファン230と、選別ファン241等によって、穀物選別機構245を構成している。
【0026】
扱胴226の下方に張設された受網237から漏下した脱穀物が、揺動選別盤227によって揺動選別(比重選別)されるように構成している。揺動選別盤227から落下した穀粒は、その穀粒中の粉塵が唐箕ファン228からの選別風によって除去され、一番コンベヤ231に落下する。一番コンベヤ231のうち脱穀装置5における穀粒タンク7寄りの一側壁(実施形態では右側壁)から外向きに突出した終端部には、上下方向に延びる揚穀コンベヤ233が連通接続されている。一番コンベヤ231から取出された穀粒は、揚穀コンベヤ233を介して穀粒タンク7に搬入され、穀粒タンク7に収集される。
【0027】
また、揺動選別盤227は、揺動選別(比重選別、唐箕風選別)によって枝梗付き穀粒等の二番物を二番コンベヤ232に落下させるように構成している。チャフシーブ239の下方に落下する二番物を風選する選別ファン241を備える。チャフシーブ239から落下した二番物は、その穀粒中の粉塵及び藁屑が選別ファン241からの選別風(唐箕風)によって除去され、二番コンベヤ232に落下する。二番コンベヤ232のうち脱穀装置5における穀粒タンク7寄りの一側壁から外向きに突出した終端部は、還元コンベヤ236を介して、揺動選別盤227の上面側の前部に連通接続され、二番物を揺動選別盤227の上面側に戻して再選別するように構成している。
【0028】
一方、図1及び図2に示す如く、フィードチェン6の後端側(送り終端側)には、排藁チェン234と排藁カッタ235が配置されている。フィードチェン6の後端側から排藁チェン234に受継がれた排藁(穀粒が脱粒された稈)は、長い状態で走行機体1の後方に排出されるか、又は脱穀装置5の後部に設けられた排藁カッタ235にて適宜長さに短く切断されたのち、走行機体1の後方下方に排出される。
【0029】
次に、図3を参照しながら、刈取装置3、脱穀装置5、フィードチェン6、排藁チェン234、排藁カッタ235等の駆動構造について説明する。図3に示す如く、エンジン14の左側にその出力軸150を突出する。エンジン14の出力軸150に走行駆動ベルト151を介してミッションケース50の走行入力軸152を連結し、エンジン14の回転駆動力が、前側の出力軸150からミッションケース50に伝達されて変速された後、左右の車軸153を介して左右の走行クローラ2に伝達され、左右の走行クローラ2がエンジン14の回転力によって駆動されるように構成している。
【0030】
図3に示す如く、エンジン14を冷却するためのラジエータ156用の冷却ファン154が、エンジン14の右側に突出した出力軸150に設けられている。また、エンジン14の右側の出力軸150に排出オーガ駆動軸157を連結し、エンジン14の回転駆動力によって排出オーガ駆動軸157を介して排出オーガ8が駆動され、穀粒タンク7内の穀粒がトラック荷台又はコンテナ等に排出されるように構成している。
【0031】
次に、図3を参照して、カウンタケース(ギヤケース)95等の動力伝達構造を説明する。図3に示す如く、脱穀装置5の各部にエンジン14の回転駆動力を伝える脱穀選別作業入力軸165と、扱胴226及び処理胴230に脱穀選別作業入力軸165の回転駆動力を伝える扱胴駆動軸160を備える。エンジン14の左側の出力軸150には、テンションローラ形脱穀クラッチ161及び脱穀駆動ベルト162を介して、脱穀選別作業入力軸165を連結する。扱胴駆動軸160上に、扱胴変速ギヤ機構159を配置する。脱穀選別作業入力軸165の回転力が、扱胴変速ギヤ機構159を介して扱胴駆動軸160に伝達される。
【0032】
また、図3に示す如く、扱胴駆動軸160には、扱胴駆動ベルト117及び扱胴ベルトテンションローラ166を介して、扱胴226を軸支した扱胴軸163と、処理胴229を軸支した処理胴軸164とを連結する。エンジン14の略一定回転数の回転力によって、扱胴226及び処理胴229が所定回転数(低速回転数又は高速回転数)で回転するように構成している。また、エンジン14の略一定回転数の回転力によって、脱穀選別作業入力軸165を介して、揺動選別盤227、唐箕ファン228、一番コンベヤ231、二番コンベヤ232、選別ファン241、排塵ファン230等の穀物選別機構245が略一定回転数で回転駆動されるように構成している。
【0033】
図1、図3に示す如く、エンジン14の左側方で、脱穀装置5の前側方の走行機体1上に、カウンタケース95を設けている。カウンタケース95には、上述した扱胴駆動軸160と、扱胴駆動軸160に連結する脱穀選別作業入力軸165と、PTO軸99に連結する車速同調軸100と、脱穀選別作業入力軸165又は車速同調軸100に変速ギヤを介して連結する刈取伝動軸101と、刈取り入力軸17に刈取伝動軸101を連結する刈取駆動軸102と、フィードチェン6を駆動するフィードチェン駆動軸103とを配置している。脱穀駆動ベルト162を介して、エンジン14の出力軸15が脱穀選別作業入力軸165に連結されている。刈取装置3及び脱穀装置5に脱穀選別作業入力軸165から一定回転数の刈取駆動力及び脱穀駆動力を伝達させる。ミッションケース50のPTO軸99が車速同調軸100に連結され、カウンタケース95にPTO軸99から車速同調駆動力を伝達させ、車速と同調して回転数が変更される刈取駆動力(車速同調駆動力)によって刈取装置3を駆動する。
【0034】
また、唐箕駆動用のベルト126及びテンションローラ126aを介して、脱穀選別作業入力軸165が唐箕ファン228に連結される。選別駆動用のベルト127及びテンションローラ127aを介して、脱穀選別作業入力軸165が一番コンベヤ231等に連結される。脱穀装置5の穀物選別機構245(唐箕ファン228等)の各部に脱穀選別作業入力軸165から穀物選別駆動力を伝達させる。また、脱穀選別作業入力軸165にフィードチェン駆動軸103を連結して、フィードチェン6を車速と同調させて作動するように構成している。
【0035】
さらに、図3に示す如く、ミッションケース50に、1対の直進用第1油圧ポンプ及び直進用第1油圧モータを有する直進(走行主変速)用の油圧式無段変速機構53と、1対の旋回用第2油圧ポンプ及び旋回用第2油圧モータを有する旋回用の油圧式無段変速機構54とを設ける。前記第1油圧ポンプ及び第2油圧ポンプの各ポンプ軸に、ミッションケース50の走行入力軸152をそれぞれ連結させて駆動するように構成している。走行入力軸152に走行駆動ベルト151を介してエンジン14の出力を伝達する。また、ミッションケース50にPTO軸99を配置し、PTO軸99に車速同調軸100を連結している。
【0036】
左右の車軸153には左右の駆動スプロケット22が取付けられている。従って、直進用の油圧式無段変速機構53の変速回転動力は、左右の車軸153から各駆動スプロケット22に同方向の同一回転数にて伝達され、左右の走行クローラ2を同方向の同一回転数にて駆動して、走行機体1を直進(前進、後退)移動させる。一方、旋回用油圧式無段変速機構54の回転動力は、左右の走行クローラ2の駆動スプロケット22のうち、一方が前進回転し、他方が後退回転し、走行機体1はその場で方向転換(信地旋回スピンターン)される。即ち、走行機体1は前進又は後退しながら信地旋回半径より大きい旋回半径で左又は右に旋回しながら、走行機体1を前進方向又は後退方向に移動させる。
【0037】
次に、図4を参照して、前記エンジン14の燃料噴射構造と、吸気及び排気構造について説明する。前記エンジン14は、ディーゼルエンジンにて構成されている。図4に示す如く、前記エンジン14には、コモンレール式燃料噴射機構31と、排気ガス再循環機構32と、排気ガス浄化機構33が付設されている。コモンレール式燃料噴射機構31は、高圧化した燃料を蓄え、エンジン14の各インジェクタにその燃料を供給するもので、電子制御によって燃料の噴射圧力、噴射時期、噴射期間(噴射量)を高精度でコントロールするように構成している。
【0038】
また、排気ガス再循環機構32は、燃焼後の排気ガスの一部を取出して吸気側に還流させるもので、排気ガス中の窒素酸化物を低減し、かつエンジンの燃費を向上するように構成している。また、排気ガス浄化機構33は、排気ガス中の粒子状物質を捕捉するフィルタと、排気ガス中の窒素酸化物をより二酸化窒素の多い状態にする酸化触媒を有し、二酸化窒素の酸化性能によって粒子状物質を燃焼する連続再生機能を有するもので、ディーゼルエンジン14から排出される排気ガス中の粒子状物質を減少させるように構成している。さらに、ラジエータ156には、エンジン14冷却用の冷却水を補給する冷却水タンクが付設されている。
【0039】
次に、図5、図6、図7を参照して、例えばメーカー単位又は販売店単位で販売管理する多数のコンバインの作動状況を一括して把握する遠隔監視制御回路及び制御態様を説明する。図5は、特定のコンバインの作動状況を、販売管理する販売店側で確認する制御回路であり、図5に示す如く、エンジン14の作動状況を検出するセンサとして、コモンレール式燃料噴射機構31の異常を検出するコモンレールセンサ61と、排気ガス再循環機構32の異常を検出する排気ガス再循環センサ62と、排気ガス浄化機構33の異常を検出する排気ガス浄化センサ63と、ラジエータ156に冷却水を補給する冷却水タンク35の残水量を検出する冷却水タンクセンサ64とを設ける。
【0040】
また、脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルト117の緊張力状態を検出する扱胴ベルトセンサ65と、選別駆動ベルト127の緊張力状態を検出する選別ベルトセンサ66を設ける。扱胴ベルトセンサ65と選別ベルトセンサ66は、唐箕駆動用のテンションローラ126a又は選別駆動用のテンションローラ127aの支持位置を検知するポテンショメータによって、扱胴駆動ベルト117又は選別駆動ベルト127の緊張力状態をそれぞれ検出するように構成している。
【0041】
また、刈取装置の作動状況を検出するセンサとして、引起タイン128の損傷有無状態を検出する引起タインセンサ67を設ける。引起タインセンサ67は、引起ケース129に引起タインチェン128aを介して設けられた複数の引起タイン128のうち、少なくとも1本が欠落したか否かを検知する接触式又は非接触式のスイッチによって、引起タイン128の損傷有無状態を検出するように構成している。
【0042】
図5に示す如く、前記コモンレールセンサ61と、排気ガス浄化センサ63と、冷却水タンクセンサ64と、扱胴ベルトセンサ65と、選別ベルトセンサ66と、引起タインセンサ67と、排出オーガ8によって排出されている穀粒の詰りを検出するグレンタンクセンサ68とを、マイクロコンピュータで形成する遠隔監視コントローラ70に入力接続する。コンバインの走行機体1に、遠隔監視コントローラ70と、コンバインの現在位置を検知するGPSセンサ(衛星測位システム)71と、遠隔監視コントローラ70の検知データ又はGPSセンサ(衛星測位システム)71の測位検知データを送信する機体側の送受信コントローラ72を搭載している。また、エンジン14を始動又は停止させるキースイッチ73を介して、遠隔監視コントローラ70にバッテリ74を接続している。
【0043】
また、図5に示す如く、販売店等の集中管理場所に設置する管理コンピュータ75を備える。機体側の送受信コントローラ72の送信データを受信する管理側の送受信コントローラ76と、表示器及び報知器を有するディスプレイシステム77を、管理コンピュータ75に接続している。販売店(メーカー)等の集中管理場所に設置された受信手段としての管理コンピュータ75に、前記各センサ61〜68の検出内容を送信する送信手段としての機体側の送受信コントローラ72を設けている。
【0044】
即ち、図6の本機側遠隔監視制御、図7の管理側遠隔監視制御のフローチャートに示す如く、遠隔監視制御が実行される。図6に示す如く、先ず、キースイッチ411がオン操作されてエンジン14が始動され、一定時間が経過したとき、前記コモンレールセンサ61値と、排気ガス浄化センサ63値と、冷却水タンクセンサ値64が、遠隔監視コントローラ70に読み込まれる。また、オペレータによって作業クラッチレバー45が入り操作されて、作業クラッチがオンのときに、扱胴ベルトセンサ65値と、選別ベルトセンサ66値と、引起タインセンサ67値と、グレンタンクセンサ68値とが、遠隔監視コントローラ70に読み込まれる。なお、エンジン14は、半固定状態のアクセルレバー(図示省略)の設定によって一定回転で定格運転され、刈取穀稈を脱穀する収穫作業が開始される。
【0045】
前記各センサ61〜68値のいずれかが異常入力のときには、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値のいずれかの異常入力が送信される。また、エンジン14が一定回転で定格運転されて収穫作業が実行され、一定時間以上に亘ってエンジン14を連続して運転した後、キースイッチ73の操作によってエンジン14を停止させたときに、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値の全てのデータが送信される。
【0046】
図7に示す如く、機体側の送受信コントローラ72の送信データ(前記各センサ61〜68値)が、管理側の送受信コントローラ76に受信され、管理コンピュータ75に記録される。機体側の送受信コントローラ72から送信された前記各センサ61〜68値のいずれかの異常入力が、管理側の送受信コントローラ76に受信され、管理コンピュータ75に記録された場合、ディスプレイシステム77に表示されて、ブザーの鳴動等によって管理者に報知される。管理者が前記各センサ61〜68値の異常入力の受信を確認するまで、その異常入力の受信がディスプレイシステム77に表示されて、管理者に報知するブザーの鳴動等が継続される。
【0047】
また、管理者が前記各センサ61〜68値の異常入力の受信を確認したときに、GPSセンサ71の位置情報によって前記異常入力のコンバインの現在位置と使用機種名がディスプレイシステム77に表示される。したがって、前記使用者がコンバインの異常発生を認知して電話等によって管理者に知らせる前に、管理者側から電話等によって前記使用者に前記異常入力の発生を知らせ、前記異常入力に早期に対応して、前記異常入力の発生に伴う事故の発生又は損害を低減すると同時に、前記異常入力に応じて管理者が部品等を用意して、前記異常入力が発生したコンバインの所在位置に管理者が速やかに移動でき、前記コンバインの異常に対して適正に対処できる。例えば、従来のように、使用者からトラブル発生の連絡があったときに、使用者の現在位置に管理者が移動して、管理者がコンバインの異常を確認してから、管理者が販売店等に戻り、管理者が部品等を調達して使用者の現在位置に再び移動して、前記コンバインに対して対処する必要がない。即ち、販売店等とコンバインの所在位置とを管理者が往復移動して、部品等を調達する作業手間を不要にすることができる。その結果、前記異常入力の原因を早期に取除く処理ができ、収穫作業の中断時間(前記異常入力の原因を解除する時間)を短縮できる。
【0048】
さらに、キースイッチ73の操作によってエンジン14を停止させたときに、管理側の送受信コントローラ76に向けて機体側の送受信コントローラ72から前記各センサ61〜68値の全ての遠隔監視データが送信された場合、それらの遠隔監視データに基づき、コモンレール式燃料噴射機構31又は排気ガス再循環機構32又は排気ガス浄化機構33のメンテナンス時期、冷却水タンク35への冷却水の補給時期、扱胴駆動ベルト117又は選別駆動ベルト127の交換時期を演算にて推定する運転状況の予知制御が実行され、前記各時期の予測データ等の運転状況をディスプレイシステム77に表示する。
【0049】
即ち、前記各時期の予測データ等の運転状況を管理者が視認して、速やかに対処できるようにディスプレイシステム77に表示される。その結果、コモンレール式燃料噴射機構31又は排気ガス再循環機構32又は排気ガス浄化機構33のトラブル発生、冷却水タンク35の冷却水不足、扱胴駆動ベルト117又は選別駆動ベルト127の切断などを未然に阻止できる。また、キースイッチ73の操作によってエンジン14を停止させたときに、該当コンバインのデータが管理コンピュータ75に送信されるから、特定のコンバインから管理コンピュータ75に送信される遠隔監視データ量を簡単に制限でき、メーカー単位又は販売店単位で販売管理する多数のコンバインの作動状況を一括して把握する管理者の遠隔監視の作業性を向上できる。
【0050】
図1、図3、図5、図6、図7に示す如く、エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段としての管理コンピュータ75に前記各センサ61〜67の検出内容を送信する送信手段としての機体側の送受信コントローラ72を設けたものであるから、販売店等の管理場所において、販売店等の管理者によって複数顧客の各コンバインの作動状況を一括して個別にそれぞれ把握できる。即ち、収穫作業中に発生する複数顧客の各コンバインのエンジン14又は脱穀装置5又は刈取装置3の動作不良に対して速やかに対処できる。また、複数顧客の各コンバインのエンジン14又は脱穀装置5又は刈取装置3のトラブルの発生を適正に予知できる。したがって、複数顧客の各コンバインのメンテナンス作業性等を向上できる。
【0051】
なお、例えばGPSセンサ71の位置情報等を利用して、前記異常入力のコンバインの現在位置と使用機種名を判明させるように構成した場合、前記異常入力のコンバインの現在位置と使用機種名が販売店等の管理者によって簡単に確認できるから、前記異常入力に応じて管理者が部品等を用意して、前記異常入力が発生したコンバインの所在位置に管理者が速やかに移動でき、前記コンバインの異常に対して適正に対処できる。前記異常入力の原因を早期に解消でき、従来に比べて、前記コンバインの運転を中断する時間(例えば収穫作業の中断時間等)を短縮できる。
【0052】
図4、図5、図6、図7に示す如く、エンジン14の作動状況を検出するセンサとして、コモンレール式燃料噴射機構31の異常を検出するコモンレールセンサ61、又は排気ガス再循環機構32の異常を検出する排気ガス再循環センサ62、又は排気ガス浄化機構33の異常を検出する排気ガス浄化センサ63、又はラジエータ156に冷却水を補給する冷却水タンク35の残水量を検出する冷却水タンクセンサ64を設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインのエンジン14を一括して個別にそれぞれ管理でき、複数顧客の各コンバインのエンジントラブルの発生を低減できる。
【0053】
図3、図5、図6、図7に示す如く、脱穀装置5の作動状況を検出するセンサとして、扱胴駆動ベルト117の緊張力状態を検出する扱胴ベルトセンサ65、又は選別駆動ベルト127の緊張力状態を検出する選別ベルトセンサ66を設けたものであるから、販売店等の管理場所において、販売店等の管理者が複数顧客の各コンバインの前記ベルト117,127の劣化を一括して個別にそれぞれ予知でき、複数顧客の各コンバインのベルトトラブルが発生するのを未然に防止できる。なお、前記ベルト117,127と同様に、走行駆動ベルト151又は脱穀駆動ベルト162の緊張力状態を検出して、各ベルト151,162の劣化を一括して個別にそれぞれ予知することも容易に行える。
【0054】
図3、図5、図6、図7に示す如く、刈取装置3の作動状況を検出するセンサとして、引起タイン128の損傷有無状態を検出する引起タインセンサ67を設けたものであるから、販売店等の管理場所において、複数顧客の各コンバインの引起タイン128の損傷有無を、販売店等の管理者が一括して個別にそれぞれ把握できる。例えば多数の引起タイン128のうちいずれか1本の引起タイン128が欠落した状態で、複数顧客のいずれかの刈取作業が実行される等の刈取トラブルを低減できる。なお、前記引起タイン128と同様に、穀稈搬送装置224の穂先搬送タインの損傷有無状態を検出して、前記穂先搬送タインの劣化を一括して個別にそれぞれ予知することも容易に行える。
【0055】
図3、図5、図6、図7に示す如く、エンジン14を一定時間以上に亘って連続して運転したときに、エンジン14を停止することによって、前記各センサ61〜67の検出内容を機体側の送受信コントローラ72から自動的に送信するように構成したものであるから、例えば、緊急の対処が必要な異常入力を除く、通常データ量(前記送信手段から送信されるデータ量)を簡単に制限でき、管理場所に設置された管理コンピュータ75のデータ監視を簡略化できる。販売店等の管理場所において、販売店等の管理者が管理する複数顧客のコンバインデータを限定して受信でき、複数顧客のコンバインデータの取扱い性を向上できる。なお、販売店等の管理者が管理コンピュータ75から指令を出すことによって、前記各センサ61〜67の検出内容を機体側の送受信コントローラ72から管理コンピュータ75に送信させることも容易に行える。
【符号の説明】
【0056】
1 走行機体
3 刈取装置
5 脱穀装置
14 エンジン
31 コモンレール式燃料噴射機構
32 排気ガス再循環機構
33 排気ガス浄化機構
35 冷却水タンク
61 コモンレールセンサ
62 排気ガス再循環センサ
63 排気ガス浄化センサ
64 冷却水タンクセンサ
65 扱胴ベルトセンサ
66 選別ベルトセンサ
67 引起タインセンサ
72 機体側の送受信コントローラ(送信手段)
75 管理コンピュータ(受信手段)
117 扱胴駆動ベルト
127 選別駆動ベルト
128 引起タイン
156 ラジエータ
226 扱胴
【特許請求の範囲】
【請求項1】
エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、
前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたことを特徴とするコンバイン。
【請求項2】
前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項3】
前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項4】
前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項5】
前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したことを特徴とする請求項1に記載のコンバイン。
【請求項1】
エンジンを搭載した走行機体と、扱胴を有する脱穀装置と、前記扱胴に刈取穀稈を供給する刈取装置を備えたコンバインにおいて、
前記エンジンの作動状況を検出するセンサと、前記脱穀装置の作動状況を検出するセンサと、前記刈取装置の作動状況を検出するセンサと、管理場所に設置された受信手段に前記各センサの検出内容を送信する送信手段を設けたことを特徴とするコンバイン。
【請求項2】
前記エンジンの作動状況を検出するセンサとして、コモンレール式燃料噴射機構の異常を検出するコモンレールセンサ、又は排気ガス再循環機構の異常を検出する排気ガス再循環センサ、又は排気ガス浄化機構の異常を検出する排気ガス浄化センサ、又はラジエータに冷却水を補給する冷却水タンクの残水量を検出する冷却水タンクセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項3】
前記脱穀装置の作動状況を検出するセンサとして、扱胴駆動ベルトの緊張力状態を検出する扱胴ベルトセンサ、又は選別駆動ベルトの緊張力状態を検出する選別ベルトセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項4】
前記刈取装置の作動状況を検出するセンサとして、引起タインの損傷有無状態を検出する引起タインセンサを設けたことを特徴とする請求項1に記載のコンバイン。
【請求項5】
前記エンジンを一定時間以上に亘って連続して運転したときに、前記エンジンを停止することによって、前記センサの検出内容を前記送信手段から自動的に送信するように構成したことを特徴とする請求項1に記載のコンバイン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−44942(P2012−44942A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−191271(P2010−191271)
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]