
コンバイン
【課題】正回転クラッチと逆回転クラッチとが共に入り状態に操作されることを防止しながら刈取り部を正逆転駆動できて、クラッチとクラッチ操作具との連係の面から構造簡単に得ることができるコンバインを提供する。
【解決手段】刈取り部に正回転駆動力を伝達する正回転クラッチと、刈取り部に逆回転駆動力を伝達する逆回転クラッチ41とを備えてある。正回転クラッチを切換え操作する正転クラッチ操作具52と、逆回転クラッチ41を切換え操作する逆転クラッチ操作具54とを別々に設けてある。正回転クラッチが入り状態にあると、逆回転クラッチ41の入り状態への切換え操作を牽制した作用状態に切り換わり、正回転クラッチが切り状態にあると、牽制を解除した解除状態に切り換わる牽制機構70を設けてある。
【解決手段】刈取り部に正回転駆動力を伝達する正回転クラッチと、刈取り部に逆回転駆動力を伝達する逆回転クラッチ41とを備えてある。正回転クラッチを切換え操作する正転クラッチ操作具52と、逆回転クラッチ41を切換え操作する逆転クラッチ操作具54とを別々に設けてある。正回転クラッチが入り状態にあると、逆回転クラッチ41の入り状態への切換え操作を牽制した作用状態に切り換わり、正回転クラッチが切り状態にあると、牽制を解除した解除状態に切り換わる牽制機構70を設けてある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインに関する。
【背景技術】
【0002】
上記したコンバインは、正回転クラッチを入り状態に切り換え操作することにより、刈取り部を正転駆動して作業する。刈取り部に穀稈詰まりが発生することがあっても、逆回転クラッチを入り状態に切り換え操作することにより、刈取り部を逆転駆動できて、詰まりを解消しやすいものである。
【0003】
この種のコンバインとして、従来、例えば特許文献1に記載されたものがあった。
特許文献1に記載されたコンバインは、エンジンの出力軸にドライブシャフトを介して入力軸が連結された脱穀側ミッションケースと、この脱穀側ミッションケースの出力軸にプーリとベルトと入力軸とを介して接続されたHSTを有した走行ミッションケースとを備えている。
前記脱穀側ミッションケースには、刈取出力軸が突設されている。この刈取出力軸は、ワンウエイクラッチ、出力プーリ、刈取正転クラッチ、正転プーリを介して刈取入力軸に動力伝達する。
前記走行ミッションケースから作業出力軸が突出している。この作業出力軸は、前記ワンウエイクラッチを介して前記出力プーリを取り付けるとともに逆転入力プーリを固設している。前記逆転入力プーリは、刈取入力軸に固設している逆転出力プーリとベルトを介して連結されている。このベルトには、刈取逆転クラッチが設けられている。
【0004】
特許文献1に記載されたコンバインでは、一つの刈取クラッチレバーを備えており、この刈取クラッチレバーが操作されることにより、刈取正転クラッチが入りになって正転の動力が刈取部に伝達されたり、刈取逆転クラッチが入りになって逆転の動力が刈取部に伝達されたりする。
すなわち、刈取クラッチレバーは、正転用リンク部材と逆転用リンク部材との間で左右回動及び前後回動自在に支持されている。刈取クラッチレバーをレバーガイドの連結用溝で正転側に倒して正転用リンク部材の溝に嵌合させ、レバーガイドの正転用溝で前方に摺動操作する。すると、正転用リンク部材が回動してこれの取付部が上方に移動し、この取付け部に連結している正転用クラッチワイヤが引張られ、刈取正転クラッチが入り操作される。
一方、刈取クラッチレバーをレバーガイドの連結用溝において逆転側に倒して逆転用リンク部材の溝に嵌合させ、レバーガイドの逆転用溝で前方に摺動操作する。すると、逆転用リンク部材が回動してこれの取付部が上方に移動し、この取付け部に連結している逆転用クラッチワイヤが引張られ、刈取逆転クラッチが入り操作される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−121123号公報(段落〔0028〕−〔0033〕、図6,7)
【発明の概要】
【発明が解決しようとする課題】
【0006】
正回転クラッチと逆回転クラッチの切り換え操作による刈取り部の正逆転駆動を可能にするのに上記した従来の技術を採用すると、クラッチ操作具を正回転クラッチに連係した状態と、逆回転クラッチに連係した状態とに切り換える連係切り換え機構を装備せねばならず、クラッチ操作具とクラッチとを連係させるのに複雑な構造の連係機構が必要になっていた。
【0007】
本発明の目的は、正回転クラッチと逆回転クラッチとが共に入り状態に操作されることを防止した状態で刈取り部を正逆転駆動できながら、クラッチとクラッチ操作具との連係の面から構造簡単に得ることができるコンバインを提供することにある。
【課題を解決するための手段】
【0008】
本第1発明は、刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインにおいて、
前記正回転クラッチを切換え操作する正転クラッチ操作具と、前記逆回転クラッチを切換え操作する逆転クラッチ操作具とを別々に設け、
前記正回転クラッチが入り状態にあると、前記逆回転クラッチの入り状態への切換え操作を牽制した作用状態に切り換わり、前記正回転クラッチが切り状態にあると、前記牽制を解除した解除状態に切り換わる牽制機構を設けてある。
【0009】
本第1発明の構成によると、正回転クラッチを入り状態にしたままで逆回転クラッチを入り状態に切り換えようとしても、牽制機構の作用によって逆回転クラッチが入り状態に切り換わらない。すると、正回転クラッチを切り換え操作する正転クラッチ操作具と、逆回転クラッチを切り換え操作する逆転クラッチ操作具とを別々に設けても、正回転クラッチを入り状態にしたままにして逆回転クラッチを入り状態にすることができない。これにより、正回転クラッチと、これの操作具としての正転クラッチ操作具とを常時連係した状態で連係させることができ、逆回転クラッチと、これの操作具としての逆転クラッチ操作具とを常時連係した状態で連係させることができる。
【0010】
従って、正回転クラッチを入り状態にしたたまで逆回転クラッチが入り状態に切り換えられることを防止しながら刈取り部を正逆転駆動できるものを、正回転クラッチにも逆回転クラッチにも操作具を連係させたままの構造簡単なものにして安価に得ることができる。
【0011】
本第2発明では、前記牽制機構は、前記正転クラッチ操作具と前記逆転クラッチ操作具との一方に一体揺動自在に支持させた牽制体と、前記正転クラッチ操作具と前記逆転クラッチ操作具との他方に設けた当たり部との当接によって前記逆転クラッチ操作具の入り位置への切り換わりを牽制することにより、逆回転クラッチの入り状態への切り換わりを牽制するよう構成されている。
【0012】
本第2発明の構成によると、正転クラッチ操作具と逆転クラッチ操作具との一方に牽制体を一体揺動自在に支持させ、正転クラッチ操作具と逆転クラッチ操作具との他方に当たり部を設けるだけの簡単な構造で牽制機構を得ることができる。
【0013】
従って、正回転クラッチを入り状態にしたたまで逆回転クラッチが入り状態に切り換えられることを防止しながら刈取り部を正逆転駆動できるものを、クラッチと操作具との連係の面のみならず、牽制機構の面でも構造簡単なものにして安価に得ることができる。
【図面の簡単な説明】
【0014】
【図1】コンバインの全体側面図である。
【図2】コンバインの全体平面図である。
【図3】伝動機構の線図である。
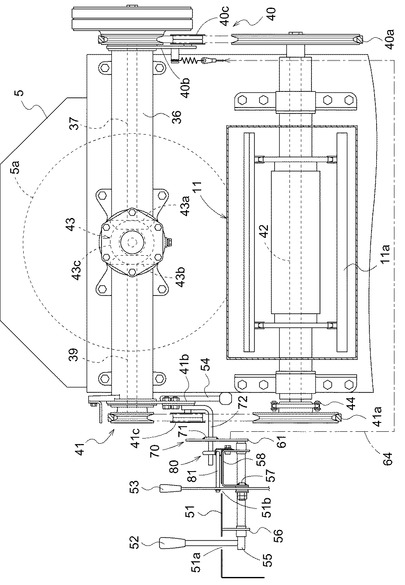
【図4】伝動ケース配設部と操作部の正面図である。
【図5】チェーン伝動機構の側面図である。
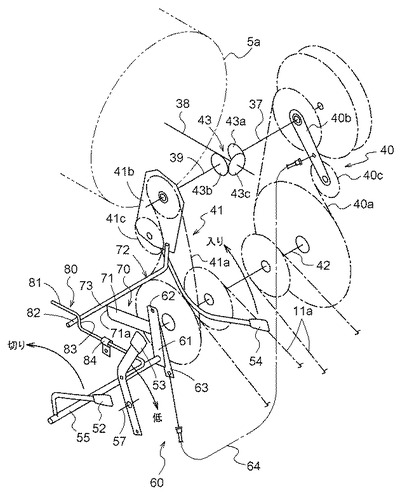
【図6】操作部の斜視図である。
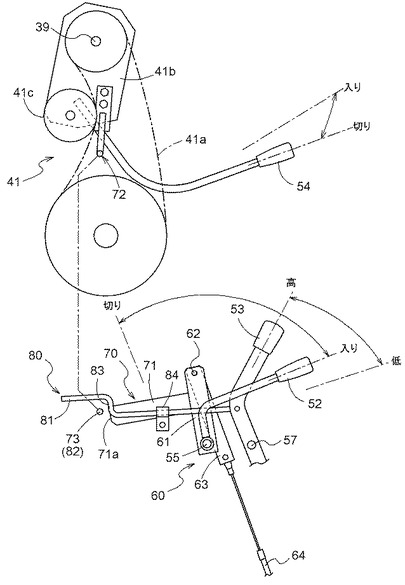
【図7】正転クラッチ操作具の入り位置への操作状態と、アクセル操作具の高速位置への操作状態と、逆転クラッチ操作具の切り位置への操作状態と、牽制機構および高速逆転牽制機構の作用状態とを示す側面図である。
【図8】正転クラッチ操作具の切り位置への操作状態と、アクセル操作具の低速位置への操作状態と、逆転クラッチ操作具の入り位置への操作状態と、牽制機構および高速逆転牽制機構の解除状態とを示す側面図である。
【図9】(イ)は、テンション輪体のチェーン緊張操作状態での側面図、(ロ)は、緊張規制体の作用状態を示す側面図である。
【図10】チェーン緊張機構の断面図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施例を図面に基づいて説明する。
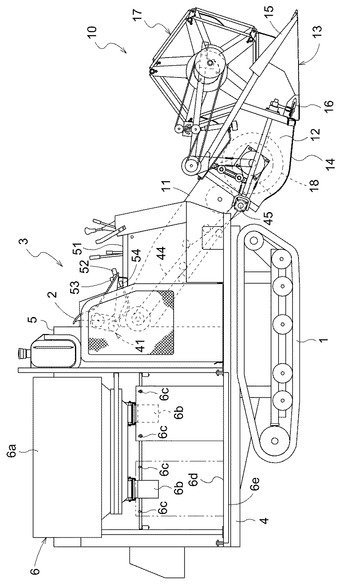
図1は、本発明の実施例に係るコンバインの全体側面図である。図2は、本発明の実施例に係るコンバインの全体平面図である。これらの図に示すように、本発明の実施例に係るコンバインは、左右一対のクローラ走行装置1,1によって自走するよう構成し、かつ運転座席2が装備された運転部3を有した自走機体を備え、この自走機体の機体フレーム4の後部側に自走機体横方向に並べて設けた脱穀装置5と穀粒袋詰め部6とを備え、前記脱穀装置5の前部にフィーダ11が連結された刈取り部10を備えている。このコンバインは、稲、麦などの穀粒を収穫するものであり、次の如く構成してある。
【0016】
前記刈取り部10は、前記フィーダ11を備える他、このフィーダ11の前端部に前処理フレーム12が連結された前処理装置13を備えて構成してある。
【0017】
前記刈取り部10は、前記フィーダ11の脱穀装置5に対する上下揺動操作により、前処理フレーム12の下部に位置するプラットホーム14が地面付近に下降した下降作業状態と、前記プラットホーム14が地面から高く上昇した上昇非作業状態とに昇降する。刈取り部10を下降作業状態にして自走機体を走行させると、前記前処理装置13は、前処理フレーム12の前部に位置する左右一対のデバイダ15,15によって刈取り対象の植立穀稈と、非刈取り対象の植立穀稈とを分草し、刈取り対象の植立穀稈を刈取り装置16の上方に位置する回転リール17によって前処理フレーム12の後方側に掻き込みながらバリカン形の前記刈取り装置16によって刈取り処理し、刈取り穀稈を前記プラットホーム14の上面側に位置するオーガ18によってフィーダ11の前側に寄せ搬送し、フィーダ11の前側に位置した刈取り穀稈を前記オーガ18が一体回転自在に備えている掻き込み杆19によってフィーダ11の入り口(図示せず)に送り込む。フィーダ11は、これの内部に位置するフィーダコンベヤ11a(図3参照)によって前記掻き込み杆19からの刈取り穀稈をフィーダ11の後端部に搬送し、この後端部に位置する排出口(図示せず)から脱穀装置5の扱室(図示せず)に刈取り穀稈の株元から穂先までの全体を供給する。
【0018】
前記脱穀装置5は、扱室に供給された刈取り穀稈を走行機体前後向きの軸芯周りに回動する扱胴5a(図3参照)によって脱穀処理し、脱穀処理物を脱穀粒と排ワラとに選別処理し、脱穀粒を前記穀粒袋詰め部6の袋詰めタンク6aに供給する。
【0019】
図1,2に示すように、前記穀粒袋詰め部6は、前記袋詰めタンク6aを備える他、この袋詰めタンク6aの走行機体前後方向に並ぶ二つの穀粒吐出筒6bのそれぞれに対応させて袋詰めタンク6aの下方に設けた袋支持杆6cと、この袋支持杆6cの下方に配置して前記機体フレーム4に設けた袋受けデッキに兼用の作業デッキ6dと、前記機体フレーム4の横端部に支持された補助デッキ6eとを備えている。補助デッキ6eは、上下揺動自在に支持されており、機体フレーム4から走行機体横外側に水平に突出した下降使用姿勢と、この下降使用姿勢から上昇揺動して走行機体上下方向に沿った上昇格納姿勢とに切り換わる。
【0020】
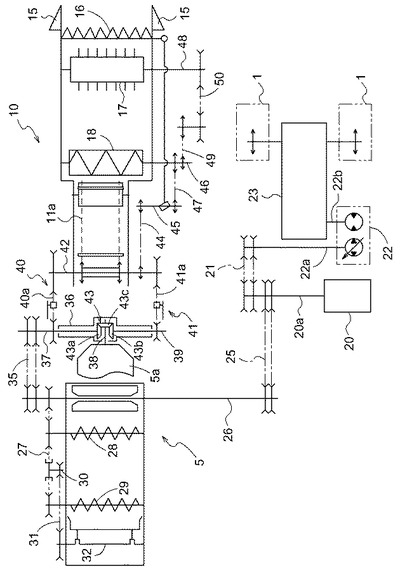
前記自走機体は、前記運転座席2の下方に設けたエンジン20を備えている。図3は、前記エンジン20の駆動力を前記走行装置1と前記脱穀装置5と前記刈取り部10とに伝達する伝動機構の線図である。この図に示すように、前記伝動機構の走行伝動部は、前記エンジン20の出力軸20aの駆動力を、ベルト伝動機構21を介して走行変速装置22の入力軸22aに伝達し、この走行変速装置22の出力軸22bの駆動力を、走行ミッション23に入力してこの走行ミッション23によって前記左右一対の走行装置1,1に伝達する。
【0021】
前記走行変速装置22は、前記走行ミッション23のケースに連設されている。この走行変速装置22は、前記入力軸22aをポンプ軸として備えた可変容量形でアキシャルプランジャ形の油圧ポンプと、この油圧ポンプからの圧油によって駆動されるアキシャルプランジャ形の油圧モータとを備えて構成されている。すなわち、走行変速装置22は、静油圧式無段変速装置になっている。
【0022】
前記伝動機構の作業伝動部は、前記エンジン20の出力軸20aをベルト伝動機構25を介して脱穀装置5の唐箕駆動軸26の一端側に連動させ、この唐箕駆動軸26の他端側をベルト伝動機構27を介して脱穀装置5の一番スクリューコンベヤ28と二番スクリューコンベヤ29とに連動させ、前記ベルト伝動機構27に設けた動力取り出し軸30をベルト伝動機構31を介して脱穀装置5の選別装置駆動軸32に連動させている。
【0023】
前記伝動機構の作業伝動部は、前記エンジン20の前記出力軸20aから出力される駆動力を、前記ベルト伝動機構25と前記唐箕駆動軸26とこの唐箕駆動軸26の他端側に設けたベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達し、このケース入力軸37の駆動力を伝動ケース36の脱穀出力軸38から扱胴5aに伝達し、前記ケース入力軸37の駆動力を、正回転クラッチ40を介して、あるいは、伝動ケース36の刈取り出力軸39と、逆回転クラッチ41とを介して刈取り部10の刈取り入力軸42に伝達する。この動力伝達についてさらに詳述すると、次の如く構成してある。
【0024】
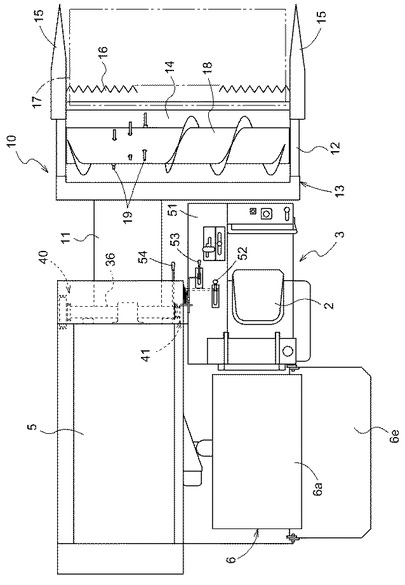
すなわち、図2,4に示すように、前記伝動ケース36は、脱穀装置5の走行機体前方側で、かつ前記フィーダ11の後端部の上方に、脱穀装置5の前壁部に支持させて設けてある。図3に示すように、前記伝動ケース36は、前記扱胴出力軸38を伝動ケース36の走行機体横方向での中央部に走行機体前後向きに配置して備えている。前記伝動ケース36は、前記ケース入力軸37と前記刈取り出力軸39とを伝動ケース36の走行機体横方向での一端側と他端側とに分散した配置にして、かつ前記扱胴出力軸38を挟んで走行機体横方向に並んだ配置にして、さらにケース入力軸37も刈取り出力軸39も走行機体横向きになった配置にして備えている。前記扱胴出力軸38は、扱胴5aの回転支軸に一体回転自在に連結されている。
【0025】
前記伝動ケース36は、前記ケース入力軸37の端部に一体回転自在に設けたベベルギヤ43aを備えたベベルギヤ機構43を収容している。このベベルギヤ機構43は、前記ベベルギヤ43aを備える他、前記刈取り出力軸39の端部に一体回転自在に設けたベベルギヤ43bと、前記ベベルギヤ43aと43bとに噛み合った状態で前記扱胴出力軸38に一体回転自在に設けたベベルギヤ43cとを備えて構成してある。つまり、ベベルギヤ機構43は、走行機体横向きのケース入力軸37と走行機体前後向きの脱穀出力軸38との連動を可能にし、かつケース入力軸37の回転方向と刈取り出力軸39の回転方向とが逆の回転方向になる状態でケース入力軸37と刈取り出力軸39とを連動させている。
【0026】
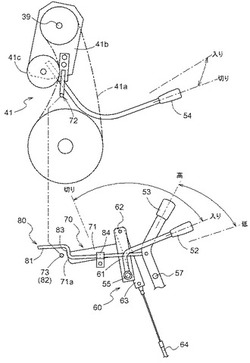
図3,4に示すように、前記正回転クラッチ40は、前記ケース入力軸37と前記刈取り入力軸42の一端側とに巻回された伝動ベルト40aがテンション部材40bのテンション輪体40cによって張り状態と緩み状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材40は、前記伝動ケース36の端部に揺動自在に支持されている。この正回転クラッチ40は、入り状態に切り換え操作されることにより、ケース入力軸37の駆動力を刈取り入力軸42に刈取り部10を正回転方向に駆動する駆動力として伝達する。
【0027】
図3,4に示すように、前記逆回転クラッチ41は、前記刈取り出力軸39と前記刈取り入力軸42の他端側とに巻回された伝動ベルト41aがテンション部材41bのテンション輪体41cによって緊張状態と弛緩状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材41bは、前記伝動ケース36の端部に揺動自在に支持されている。この逆回転クラッチ41は、入り状態に切り換え操作されることにより、刈取り出力軸39の駆動力を刈取り入力軸42に刈取り部10を逆回転方向に駆動する駆動力として伝達する。
【0028】
図3に示すように、前記刈取り入力軸42は、前記フィーダコンベヤ11aを駆動するコンベヤ駆動軸になっている。前記刈取り入力軸42は、伝動チェーン44を介して刈取り装置16の駆動軸45に連動されている。この駆動軸45と、前記オーガ18の駆動軸46とが伝動チェーン47によって連動されている。オーガ18の駆動軸46と、回転リール17の駆動軸48とが、伝動チェーン49と伝動ベルト50とを利用した連動機構によって連動されている。
【0029】
刈取り入力軸42は、正回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の前処理作業や搬送作業を行うよう正回転方向に駆動し、逆回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の作業用回転方向とは逆の回転方向に駆動する。
【0030】
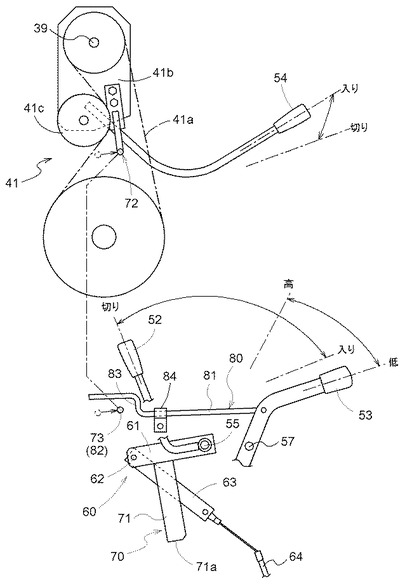
図4は、前記正回転クラッチ40と前記逆回転クラッチ41との切り換え操作、および前記エンジン20の調速操作を行うよう前記運転部3に設けた操作部の正面視での構造を示している。図6は、前記操作部の斜視図である。これらの図と図2とに示すように、前記操作部は、前記運転座席2の横側方に設けた操作盤51と、この操作盤51に走行機体横方向に並べて設けたレバー形の正転クラッチ操作具52とレバー形のアクセル操作具53と、前記操作盤51の運転座席側とは反対側の横外側に設けたレバー形の逆転クラッチ操作具54とを備えている。
【0031】
前記正転クラッチ操作具52は、この操作具52の基部に一体回転自在に連結した回転支軸55を介して支持部材56に支持されており、前記回転支軸55の走行機体横向き軸芯のまわりに揺動する。前記支持部材56は、操作盤51の裏面側に取り付けられている。この正転クラッチ操作具52は、前記回転支軸55の正転クラッチ操作具52が連結している側とは反対側の端部に一体回転自在に設けた揺動アーム61を備えた連動機構60により、正回転クラッチ40のテンション部材40bに連動されている。
【0032】
図6,7に示すように、前記連動機構60は、前記揺動アーム61を備える他、この揺動アーム61の遊端部に連結ピン62を介して一端部が相対回転自在に連結された揺動リンク63と、この揺動リンク63の他端部を正回転クラッチ40のテンション部材40bにインナーケーブルによって連動させている操作ケーブル64とを備えて構成してある。
【0033】
図7は、正転クラッチ操作具52の入り位置「入り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を回転支軸55の走行機体横向きの軸芯まわりに操作盤51のガイド溝51a(図4参照)に沿わせて走行機体前後方向に揺動操作してガイド溝51aの前端側に位置させると、正転クラッチ操作具52が入り位置「入り」になる。すると、正転クラッチ操作具52は、揺動アーム61を上昇揺動操作して揺動リンク63を引き上げ操作する。これにより、操作ケーブル64のインナーケーブルが引っ張り操作されてテンション部材40bを伝動ベルト40aに押圧作用するよう揺動操作し、伝動ベルト40aが張り状態になって正回転クラッチ40が入り状態になる。
【0034】
図8は、正転クラッチ操作具52の切り位置「切り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を前記ガイド溝51aの後端側に位置させると、正転クラッチ操作具52が切り位置「切り」になる。すると、正転クラッチ操作具52は、揺動アーム61を下降揺動操作して揺動リンク63を下げ操作する。これにより、操作ケーブル64のインナーケーブルが緩め操作されてテンション部材40bを伝動ベルト40aの押圧を解除するよう揺動操作し、伝動ベルト40aが緩み状態になって正回転クラッチ40が切り状態になる。
【0035】
図4,6,7に示すように、前記逆転クラッチ操作具41は、逆回転クラッチ41のテンション部材41bに連結されており、このテンション部材41bを介して前記伝動ケース36の端部に揺動自在に支持されている。
【0036】
図8は、逆転クラッチ操作具41の入り位置「入り」への操作状態を示している。この図に示すように、逆転クラッチ操作具41を前記刈取り出力軸39の走行機体横向きの軸芯まわりに上昇揺動操作すると、逆転クラッチ操作具41が入り位置「入り」になる。すると、逆転クラッチ操作具41は、テンション部材41bを入り側に揺動操作する。これにより、テンションローラ41cが伝動ベルト41aを張り操作し、逆回転クラッチ41が入り状態になる。このとき、逆回転クラッチ41は、逆転クラッチ操作具41が入り位置「入り」に人為操作によって維持されることにより、入り状態を維持する。
【0037】
図7は、逆転クラッチ操作具54の切り位置「切り」への操作状態を示している。この図に示すように、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すると、逆転クラッチ操作具54が自然に下降揺動して切り位置「切り」になる。すると、逆転クラッチ操作具54は、テンション部材41bを切り側に揺動操作する。これにより、テンションローラ41eが伝動ベルト41aの張り操作を解除し、伝動ベルト41aが緩み状態になって逆回転クラッチ41が切り状態になる。
【0038】
図4に示すように、前記アクセル操作具53は、これの基端側を挿通した支軸57を介して支持部材58に支持されており、支軸57の走行機体横向きの軸芯まわりに揺動する。支持部材58は、操作盤51の裏面側に取り付けられている。このアクセル操作具53は、アクセル操作具53の基端部にインナーケーブルの一端側が連結された操作ケーブル(図示せず)によってエンジン20のアクセル装置(図示せず)に連動されている。
【0039】
図7は、アクセル操作具53の高速位置「高」への操作状態を示している。この図に示すように、アクセル操作具53を支軸57の走行機体横向き軸芯のまわりに操作盤51のガイド溝51b(図4参照)に沿わせて揺動操作してガイド溝51bの後端側に位置させる。すると、アクセル操作具53は、高速位置「高」になってアクセル装置を高速状態に操作する。これにより、エンジン20が作業用に設定した高回転数で回転する作業用高速状態になる。
【0040】
図8は、アクセル操作具53の低速位置「低」への操作状態を示している。この図に示すように、アクセル操作具53を前記ガイド溝51bの前端側に位置させる。すると、アクセル操作具53は、低速位置「低」になってアクセル装置を低速状態に操作する。これにより、エンジン20が刈取り部10の逆転駆動用に設定した低回転数で回転する非作業用低速状態になる。
【0041】
図4,6,7に示すように、前記操作部は、前記揺動アーム61に一端側が連結した帯板材によって構成された牽制体71を有した牽制機構70と、前記アクセル操作具53に連結した屈曲杆体によって構成された高速逆転牽制体81を有した高速逆転牽制機構80とを備えている。
【0042】
前記牽制機構70は、前記牽制体71を備える他、前記テンション部材41bから前記操作盤51の上面側に向かって延出した屈曲杆72によって構成した当たり部73を備えて構成してある。
【0043】
牽制体71は、前記揺動アーム61に連結した帯板材で構成してあることにより、揺動アーム61と回転支軸55とを介して正転クラッチ操作具52に支持されており、正転クラッチ操作具52と一体移動する。当たり部73は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。
【0044】
図7は、牽制機構70の作用状態での側面図である。この図に示すように、正転クラッチ操作具52が入り位置「入り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さと同じ配置高さに上昇操作される。すると、牽制体71は、帯板材の端部で成る牽制作用部71aが前記当たり部73の移動経路に入り込んだ作用位置になる。これにより、牽制体71は、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部71aと前記当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への移動を不能にする。
【0045】
つまり、牽制機構70は、正回転クラッチ40が入り状態にあると、牽制体71の牽制作用部71aと、逆転クラッチ操作具54が備える当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への切り換わりを牽制し、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
【0046】
図8は、牽制機構70の解除状態での側面図である。この図に示すように、正転クラッチ操作具52が切り位置「切り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さよりも低い位置に下げ操作される。すると、牽制体71は、前記当たり部73の移動経路からこれの外部に退避した解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の前記当たり部73と前記牽制作用部71aとの当接を回避する。
【0047】
つまり、牽制機構70は、正回転クラッチ40が切り状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
【0048】
前記高速逆転牽制機構80は、前記高速逆転牽制体81を備える他、前記屈曲杆72によって構成した当たり部82を備えて構成してある。
【0049】
高速逆転牽制体81は、アクセル操作具53に連結した屈曲杆で構成してあることにより、アクセル操作具53に支持されており、アクセル操作具53と一体移動する。当たり部82は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。高速逆転牽制体81は、これを構成する屈曲杆体の屈曲部で成る牽制作用部83を備えている。この高速逆転牽制体81は、アクセル操作具53に連結している部位と前記牽制作用部83との間に位置する部位で、前記操作盤51に支持されたホルダー84に移動自在に維持されている。ホルダ−84は、前記操作盤51に支持されている。
【0050】
図7は、高速逆転牽制機構80の作用状態での側面図である。この図に示すように、アクセル操作具53が高速位置「高」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体後方側に移動操作される。すると、高速逆転牽制体81は、作用位置になり、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部83と前記当たり部82との当接によって逆転クラッチ操作具54の入り位置「入り」への移動に抵抗を付与する。
【0051】
つまり、高速逆転牽制機構80は、エンジン20が作業用高速状態にあると、高速逆転牽制体81の牽制作用部83と、逆転クラッチ操作具54が備える当たり部82との当接によって逆転クラッチ操作具54を入り位置「入り」に移動しにくくし、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
【0052】
図8は、高速逆転牽制機構80の解除状態での側面図である。この図に示すように、アクセル操作具53が低速位置「低」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体前方側に移動操作される。すると、高速逆転牽制体81は、解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の高速逆転牽制体81の牽制作用部83と逆転クラッチ操作具54の当たり部82との当接を回避する。
【0053】
つまり、高速逆転牽制機構80は、エンジン20が非作業用低速状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
【0054】
つまり、作業を行う場合、アクセル操作具53を高速位置「高」に操作し、逆転クラッチ操作具54を切り位置「切り」に操作し、正転クラッチ操作具52を入り位置「入り」に操作する。すると、エンジン20が作業用高速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達されてこのケース入力軸37が駆動され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されてこの刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が入り状態になってケース入力軸37の駆動力が正回転クラッチ40によって刈取り入力軸42に伝達され、逆回転クラッチ41が切り状態になって刈取り出力軸39の駆動力が刈取り入力軸42に伝達されず、刈取り入力軸42が正回転方向に作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が正回転方向に作業に適切な回転速度で駆動される。
【0055】
刈取り部10に穀稈詰まりが発生した場合、アクセル操作具53を低速位置「低」に切り換え操作し、正転クラッチ操作具52を切り位置「切り」に切り換え操作し、逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。このとき、アクセル操作具53の低速位置「低」への切り換え操作を行って高速逆転牽制機構80による逆転クラッチ41の切り換え牽制を解除し、かつ正転クラッチ操作具52の切り位置「切り」への切り換え操作を行って牽制機構70による逆回転クラッチ41の切り換え牽制を解除した後に逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。
【0056】
すると、エンジン20が非作業用低速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されて、この刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が切り状態になってケース入力軸37の駆動力が刈取り入力軸42に伝達されず、逆回転クラッチ41が入り状態になって刈取り出力軸39の駆動力が逆回転クラッチ41によって刈取り入力軸42に伝達され、刈取り入力軸42が逆回転方向に非作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が逆回転方向に詰まり解消に適切な回転速度で駆動され、穀稈詰まりの解消が容易となる。このとき、逆転クラッチ操作具54を入り位置「入り」に人為的に維持操作している間だけ、逆回転クラッチ41が入り状態になって刈取り部10が逆転駆動され、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すれば、逆転クラッチ操作具54が自然に切り位置「切り」に切り換わり、逆回転クラッチ41が切り状態になって刈取り部10の逆転駆動が停止する。
【0057】
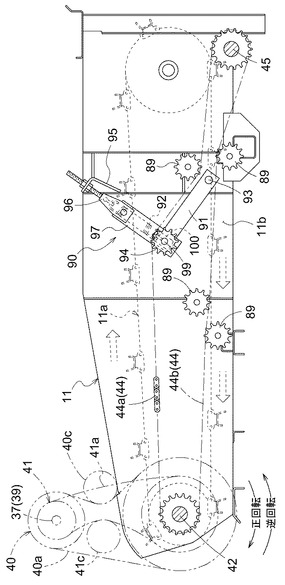
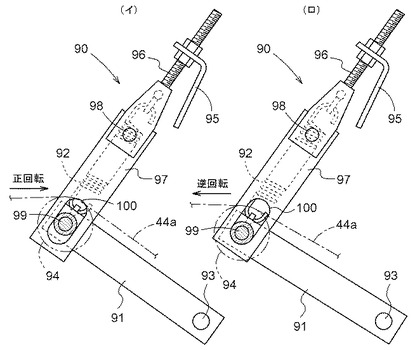
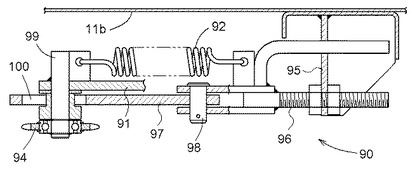
図5は、前記伝動チェーン44を有したチェーン伝動機構の側面図である。この図に示すように、前記チェーン伝動機構は、前記伝動チェーン44が案内されるよう巻回されたガイド輪体89を備え、前記フィーダ11の横側壁部11bに支持されたテンションアーム91を有したチェーン緊張機構90を備えている。
【0058】
図5,10に示すように、前記チェーン緊張機構90は、前記テンションアーム91を備える他、このテンションアーム91に連結されたスプリング92を備えて構成してあり、前記スプリング92によってテンションアーム91を支軸93のまわりに揺動付勢し、これによってテンションアーム91が備える遊転自在なテンション輪体94を伝動チェーン44に押圧付勢することにより、伝動チェーン44に緊張力を付与している。
【0059】
前記スプリング92のテンションアーム91に連結している側とは反対側は、前記フィーダ11の横側壁部11bにブラケット95を介して支持されたスプリング支持杆96に連結されている。前記テンション輪体94は、前記伝動チェーン44のうち、刈取り部10の正転駆動時に緩み側となる部位44aに作用している。前記テンションアーム91は、このテンションアーム91と前記スプリング支持杆96とにわたって取り付けた緊張規制体97を備えている。
【0060】
図9,10に示すように、前記緊張規制体97と前記スプリング支持杆96とは、連結ピン98を介して相対回動自在に連結している。前記緊張規制体97と前記テンションアーム91とは、前記テンション輪体94を遊転自在に支持する支軸99によって連結している。前記支軸99は、緊張規制体97に設けた規制長孔100を摺動自在に挿通している。
【0061】
図9(イ)は、刈取り部10が正転駆動された場合でのテンション輪体94のチェーン緊張操作状態を示す。この図に示すように、刈取り部10が正転駆動された場合、伝動チェーン44のテンション輪体94が作用する部位44aが緩み側になる。すると、テンション輪体94は、スプリング92による引っ張り操作によってチェーン部位44aを張り操作する。
【0062】
図9(ロ)は、刈取り部10が逆転駆動された場合の緊張規制体97の作用状態を示す。この図に示すように、刈取り部10が逆転駆動された場合、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制する。これにより、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bがガイド林体9から外れにくくなる。
【0063】
つまり、伝動チェーン44のテンション輪体94が作用する部位44aが張り側となると、この張り力のためにテンション輪体94がスプリング92に抗して移動操作される。すると、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制するよう支軸99を介してテンション輪体94を支持する。この結果、緊張規制体97は、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bにガイド輪体89から外れるような大幅な緩みが発生しないようこの部位44bの緩み代を抑制する。
【0064】
〔別実施例〕
上記した実施例の牽制機構70に替え、牽制体71を逆転クラッチ操作具54に設け、正転クラッチ操作具52に当たり部を設けた構成の牽制機構を採用して実施してもよい。この場合も、本発明の目的を達成することができる。
【符号の説明】
【0065】
10 刈取り部
40 正回転クラッチ
41 逆回転クラッチ
52 正転クラッチ操作具
54 逆転クラッチ操作具
70 牽制機構
71 牽制体
73 当たり部
【技術分野】
【0001】
本発明は、刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインに関する。
【背景技術】
【0002】
上記したコンバインは、正回転クラッチを入り状態に切り換え操作することにより、刈取り部を正転駆動して作業する。刈取り部に穀稈詰まりが発生することがあっても、逆回転クラッチを入り状態に切り換え操作することにより、刈取り部を逆転駆動できて、詰まりを解消しやすいものである。
【0003】
この種のコンバインとして、従来、例えば特許文献1に記載されたものがあった。
特許文献1に記載されたコンバインは、エンジンの出力軸にドライブシャフトを介して入力軸が連結された脱穀側ミッションケースと、この脱穀側ミッションケースの出力軸にプーリとベルトと入力軸とを介して接続されたHSTを有した走行ミッションケースとを備えている。
前記脱穀側ミッションケースには、刈取出力軸が突設されている。この刈取出力軸は、ワンウエイクラッチ、出力プーリ、刈取正転クラッチ、正転プーリを介して刈取入力軸に動力伝達する。
前記走行ミッションケースから作業出力軸が突出している。この作業出力軸は、前記ワンウエイクラッチを介して前記出力プーリを取り付けるとともに逆転入力プーリを固設している。前記逆転入力プーリは、刈取入力軸に固設している逆転出力プーリとベルトを介して連結されている。このベルトには、刈取逆転クラッチが設けられている。
【0004】
特許文献1に記載されたコンバインでは、一つの刈取クラッチレバーを備えており、この刈取クラッチレバーが操作されることにより、刈取正転クラッチが入りになって正転の動力が刈取部に伝達されたり、刈取逆転クラッチが入りになって逆転の動力が刈取部に伝達されたりする。
すなわち、刈取クラッチレバーは、正転用リンク部材と逆転用リンク部材との間で左右回動及び前後回動自在に支持されている。刈取クラッチレバーをレバーガイドの連結用溝で正転側に倒して正転用リンク部材の溝に嵌合させ、レバーガイドの正転用溝で前方に摺動操作する。すると、正転用リンク部材が回動してこれの取付部が上方に移動し、この取付け部に連結している正転用クラッチワイヤが引張られ、刈取正転クラッチが入り操作される。
一方、刈取クラッチレバーをレバーガイドの連結用溝において逆転側に倒して逆転用リンク部材の溝に嵌合させ、レバーガイドの逆転用溝で前方に摺動操作する。すると、逆転用リンク部材が回動してこれの取付部が上方に移動し、この取付け部に連結している逆転用クラッチワイヤが引張られ、刈取逆転クラッチが入り操作される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−121123号公報(段落〔0028〕−〔0033〕、図6,7)
【発明の概要】
【発明が解決しようとする課題】
【0006】
正回転クラッチと逆回転クラッチの切り換え操作による刈取り部の正逆転駆動を可能にするのに上記した従来の技術を採用すると、クラッチ操作具を正回転クラッチに連係した状態と、逆回転クラッチに連係した状態とに切り換える連係切り換え機構を装備せねばならず、クラッチ操作具とクラッチとを連係させるのに複雑な構造の連係機構が必要になっていた。
【0007】
本発明の目的は、正回転クラッチと逆回転クラッチとが共に入り状態に操作されることを防止した状態で刈取り部を正逆転駆動できながら、クラッチとクラッチ操作具との連係の面から構造簡単に得ることができるコンバインを提供することにある。
【課題を解決するための手段】
【0008】
本第1発明は、刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインにおいて、
前記正回転クラッチを切換え操作する正転クラッチ操作具と、前記逆回転クラッチを切換え操作する逆転クラッチ操作具とを別々に設け、
前記正回転クラッチが入り状態にあると、前記逆回転クラッチの入り状態への切換え操作を牽制した作用状態に切り換わり、前記正回転クラッチが切り状態にあると、前記牽制を解除した解除状態に切り換わる牽制機構を設けてある。
【0009】
本第1発明の構成によると、正回転クラッチを入り状態にしたままで逆回転クラッチを入り状態に切り換えようとしても、牽制機構の作用によって逆回転クラッチが入り状態に切り換わらない。すると、正回転クラッチを切り換え操作する正転クラッチ操作具と、逆回転クラッチを切り換え操作する逆転クラッチ操作具とを別々に設けても、正回転クラッチを入り状態にしたままにして逆回転クラッチを入り状態にすることができない。これにより、正回転クラッチと、これの操作具としての正転クラッチ操作具とを常時連係した状態で連係させることができ、逆回転クラッチと、これの操作具としての逆転クラッチ操作具とを常時連係した状態で連係させることができる。
【0010】
従って、正回転クラッチを入り状態にしたたまで逆回転クラッチが入り状態に切り換えられることを防止しながら刈取り部を正逆転駆動できるものを、正回転クラッチにも逆回転クラッチにも操作具を連係させたままの構造簡単なものにして安価に得ることができる。
【0011】
本第2発明では、前記牽制機構は、前記正転クラッチ操作具と前記逆転クラッチ操作具との一方に一体揺動自在に支持させた牽制体と、前記正転クラッチ操作具と前記逆転クラッチ操作具との他方に設けた当たり部との当接によって前記逆転クラッチ操作具の入り位置への切り換わりを牽制することにより、逆回転クラッチの入り状態への切り換わりを牽制するよう構成されている。
【0012】
本第2発明の構成によると、正転クラッチ操作具と逆転クラッチ操作具との一方に牽制体を一体揺動自在に支持させ、正転クラッチ操作具と逆転クラッチ操作具との他方に当たり部を設けるだけの簡単な構造で牽制機構を得ることができる。
【0013】
従って、正回転クラッチを入り状態にしたたまで逆回転クラッチが入り状態に切り換えられることを防止しながら刈取り部を正逆転駆動できるものを、クラッチと操作具との連係の面のみならず、牽制機構の面でも構造簡単なものにして安価に得ることができる。
【図面の簡単な説明】
【0014】
【図1】コンバインの全体側面図である。
【図2】コンバインの全体平面図である。
【図3】伝動機構の線図である。
【図4】伝動ケース配設部と操作部の正面図である。
【図5】チェーン伝動機構の側面図である。
【図6】操作部の斜視図である。
【図7】正転クラッチ操作具の入り位置への操作状態と、アクセル操作具の高速位置への操作状態と、逆転クラッチ操作具の切り位置への操作状態と、牽制機構および高速逆転牽制機構の作用状態とを示す側面図である。
【図8】正転クラッチ操作具の切り位置への操作状態と、アクセル操作具の低速位置への操作状態と、逆転クラッチ操作具の入り位置への操作状態と、牽制機構および高速逆転牽制機構の解除状態とを示す側面図である。
【図9】(イ)は、テンション輪体のチェーン緊張操作状態での側面図、(ロ)は、緊張規制体の作用状態を示す側面図である。
【図10】チェーン緊張機構の断面図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施例を図面に基づいて説明する。
図1は、本発明の実施例に係るコンバインの全体側面図である。図2は、本発明の実施例に係るコンバインの全体平面図である。これらの図に示すように、本発明の実施例に係るコンバインは、左右一対のクローラ走行装置1,1によって自走するよう構成し、かつ運転座席2が装備された運転部3を有した自走機体を備え、この自走機体の機体フレーム4の後部側に自走機体横方向に並べて設けた脱穀装置5と穀粒袋詰め部6とを備え、前記脱穀装置5の前部にフィーダ11が連結された刈取り部10を備えている。このコンバインは、稲、麦などの穀粒を収穫するものであり、次の如く構成してある。
【0016】
前記刈取り部10は、前記フィーダ11を備える他、このフィーダ11の前端部に前処理フレーム12が連結された前処理装置13を備えて構成してある。
【0017】
前記刈取り部10は、前記フィーダ11の脱穀装置5に対する上下揺動操作により、前処理フレーム12の下部に位置するプラットホーム14が地面付近に下降した下降作業状態と、前記プラットホーム14が地面から高く上昇した上昇非作業状態とに昇降する。刈取り部10を下降作業状態にして自走機体を走行させると、前記前処理装置13は、前処理フレーム12の前部に位置する左右一対のデバイダ15,15によって刈取り対象の植立穀稈と、非刈取り対象の植立穀稈とを分草し、刈取り対象の植立穀稈を刈取り装置16の上方に位置する回転リール17によって前処理フレーム12の後方側に掻き込みながらバリカン形の前記刈取り装置16によって刈取り処理し、刈取り穀稈を前記プラットホーム14の上面側に位置するオーガ18によってフィーダ11の前側に寄せ搬送し、フィーダ11の前側に位置した刈取り穀稈を前記オーガ18が一体回転自在に備えている掻き込み杆19によってフィーダ11の入り口(図示せず)に送り込む。フィーダ11は、これの内部に位置するフィーダコンベヤ11a(図3参照)によって前記掻き込み杆19からの刈取り穀稈をフィーダ11の後端部に搬送し、この後端部に位置する排出口(図示せず)から脱穀装置5の扱室(図示せず)に刈取り穀稈の株元から穂先までの全体を供給する。
【0018】
前記脱穀装置5は、扱室に供給された刈取り穀稈を走行機体前後向きの軸芯周りに回動する扱胴5a(図3参照)によって脱穀処理し、脱穀処理物を脱穀粒と排ワラとに選別処理し、脱穀粒を前記穀粒袋詰め部6の袋詰めタンク6aに供給する。
【0019】
図1,2に示すように、前記穀粒袋詰め部6は、前記袋詰めタンク6aを備える他、この袋詰めタンク6aの走行機体前後方向に並ぶ二つの穀粒吐出筒6bのそれぞれに対応させて袋詰めタンク6aの下方に設けた袋支持杆6cと、この袋支持杆6cの下方に配置して前記機体フレーム4に設けた袋受けデッキに兼用の作業デッキ6dと、前記機体フレーム4の横端部に支持された補助デッキ6eとを備えている。補助デッキ6eは、上下揺動自在に支持されており、機体フレーム4から走行機体横外側に水平に突出した下降使用姿勢と、この下降使用姿勢から上昇揺動して走行機体上下方向に沿った上昇格納姿勢とに切り換わる。
【0020】
前記自走機体は、前記運転座席2の下方に設けたエンジン20を備えている。図3は、前記エンジン20の駆動力を前記走行装置1と前記脱穀装置5と前記刈取り部10とに伝達する伝動機構の線図である。この図に示すように、前記伝動機構の走行伝動部は、前記エンジン20の出力軸20aの駆動力を、ベルト伝動機構21を介して走行変速装置22の入力軸22aに伝達し、この走行変速装置22の出力軸22bの駆動力を、走行ミッション23に入力してこの走行ミッション23によって前記左右一対の走行装置1,1に伝達する。
【0021】
前記走行変速装置22は、前記走行ミッション23のケースに連設されている。この走行変速装置22は、前記入力軸22aをポンプ軸として備えた可変容量形でアキシャルプランジャ形の油圧ポンプと、この油圧ポンプからの圧油によって駆動されるアキシャルプランジャ形の油圧モータとを備えて構成されている。すなわち、走行変速装置22は、静油圧式無段変速装置になっている。
【0022】
前記伝動機構の作業伝動部は、前記エンジン20の出力軸20aをベルト伝動機構25を介して脱穀装置5の唐箕駆動軸26の一端側に連動させ、この唐箕駆動軸26の他端側をベルト伝動機構27を介して脱穀装置5の一番スクリューコンベヤ28と二番スクリューコンベヤ29とに連動させ、前記ベルト伝動機構27に設けた動力取り出し軸30をベルト伝動機構31を介して脱穀装置5の選別装置駆動軸32に連動させている。
【0023】
前記伝動機構の作業伝動部は、前記エンジン20の前記出力軸20aから出力される駆動力を、前記ベルト伝動機構25と前記唐箕駆動軸26とこの唐箕駆動軸26の他端側に設けたベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達し、このケース入力軸37の駆動力を伝動ケース36の脱穀出力軸38から扱胴5aに伝達し、前記ケース入力軸37の駆動力を、正回転クラッチ40を介して、あるいは、伝動ケース36の刈取り出力軸39と、逆回転クラッチ41とを介して刈取り部10の刈取り入力軸42に伝達する。この動力伝達についてさらに詳述すると、次の如く構成してある。
【0024】
すなわち、図2,4に示すように、前記伝動ケース36は、脱穀装置5の走行機体前方側で、かつ前記フィーダ11の後端部の上方に、脱穀装置5の前壁部に支持させて設けてある。図3に示すように、前記伝動ケース36は、前記扱胴出力軸38を伝動ケース36の走行機体横方向での中央部に走行機体前後向きに配置して備えている。前記伝動ケース36は、前記ケース入力軸37と前記刈取り出力軸39とを伝動ケース36の走行機体横方向での一端側と他端側とに分散した配置にして、かつ前記扱胴出力軸38を挟んで走行機体横方向に並んだ配置にして、さらにケース入力軸37も刈取り出力軸39も走行機体横向きになった配置にして備えている。前記扱胴出力軸38は、扱胴5aの回転支軸に一体回転自在に連結されている。
【0025】
前記伝動ケース36は、前記ケース入力軸37の端部に一体回転自在に設けたベベルギヤ43aを備えたベベルギヤ機構43を収容している。このベベルギヤ機構43は、前記ベベルギヤ43aを備える他、前記刈取り出力軸39の端部に一体回転自在に設けたベベルギヤ43bと、前記ベベルギヤ43aと43bとに噛み合った状態で前記扱胴出力軸38に一体回転自在に設けたベベルギヤ43cとを備えて構成してある。つまり、ベベルギヤ機構43は、走行機体横向きのケース入力軸37と走行機体前後向きの脱穀出力軸38との連動を可能にし、かつケース入力軸37の回転方向と刈取り出力軸39の回転方向とが逆の回転方向になる状態でケース入力軸37と刈取り出力軸39とを連動させている。
【0026】
図3,4に示すように、前記正回転クラッチ40は、前記ケース入力軸37と前記刈取り入力軸42の一端側とに巻回された伝動ベルト40aがテンション部材40bのテンション輪体40cによって張り状態と緩み状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材40は、前記伝動ケース36の端部に揺動自在に支持されている。この正回転クラッチ40は、入り状態に切り換え操作されることにより、ケース入力軸37の駆動力を刈取り入力軸42に刈取り部10を正回転方向に駆動する駆動力として伝達する。
【0027】
図3,4に示すように、前記逆回転クラッチ41は、前記刈取り出力軸39と前記刈取り入力軸42の他端側とに巻回された伝動ベルト41aがテンション部材41bのテンション輪体41cによって緊張状態と弛緩状態とに切り換え操作されることで入り状態と切り状態とに切り換わるようベルトテンションクラッチになっている。テンション部材41bは、前記伝動ケース36の端部に揺動自在に支持されている。この逆回転クラッチ41は、入り状態に切り換え操作されることにより、刈取り出力軸39の駆動力を刈取り入力軸42に刈取り部10を逆回転方向に駆動する駆動力として伝達する。
【0028】
図3に示すように、前記刈取り入力軸42は、前記フィーダコンベヤ11aを駆動するコンベヤ駆動軸になっている。前記刈取り入力軸42は、伝動チェーン44を介して刈取り装置16の駆動軸45に連動されている。この駆動軸45と、前記オーガ18の駆動軸46とが伝動チェーン47によって連動されている。オーガ18の駆動軸46と、回転リール17の駆動軸48とが、伝動チェーン49と伝動ベルト50とを利用した連動機構によって連動されている。
【0029】
刈取り入力軸42は、正回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の前処理作業や搬送作業を行うよう正回転方向に駆動し、逆回転方向の駆動力が伝達されると、刈取り部10のフィーダコンベア11aとオーガ18と刈取り装置16と回転リール17とを通常の作業用回転方向とは逆の回転方向に駆動する。
【0030】
図4は、前記正回転クラッチ40と前記逆回転クラッチ41との切り換え操作、および前記エンジン20の調速操作を行うよう前記運転部3に設けた操作部の正面視での構造を示している。図6は、前記操作部の斜視図である。これらの図と図2とに示すように、前記操作部は、前記運転座席2の横側方に設けた操作盤51と、この操作盤51に走行機体横方向に並べて設けたレバー形の正転クラッチ操作具52とレバー形のアクセル操作具53と、前記操作盤51の運転座席側とは反対側の横外側に設けたレバー形の逆転クラッチ操作具54とを備えている。
【0031】
前記正転クラッチ操作具52は、この操作具52の基部に一体回転自在に連結した回転支軸55を介して支持部材56に支持されており、前記回転支軸55の走行機体横向き軸芯のまわりに揺動する。前記支持部材56は、操作盤51の裏面側に取り付けられている。この正転クラッチ操作具52は、前記回転支軸55の正転クラッチ操作具52が連結している側とは反対側の端部に一体回転自在に設けた揺動アーム61を備えた連動機構60により、正回転クラッチ40のテンション部材40bに連動されている。
【0032】
図6,7に示すように、前記連動機構60は、前記揺動アーム61を備える他、この揺動アーム61の遊端部に連結ピン62を介して一端部が相対回転自在に連結された揺動リンク63と、この揺動リンク63の他端部を正回転クラッチ40のテンション部材40bにインナーケーブルによって連動させている操作ケーブル64とを備えて構成してある。
【0033】
図7は、正転クラッチ操作具52の入り位置「入り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を回転支軸55の走行機体横向きの軸芯まわりに操作盤51のガイド溝51a(図4参照)に沿わせて走行機体前後方向に揺動操作してガイド溝51aの前端側に位置させると、正転クラッチ操作具52が入り位置「入り」になる。すると、正転クラッチ操作具52は、揺動アーム61を上昇揺動操作して揺動リンク63を引き上げ操作する。これにより、操作ケーブル64のインナーケーブルが引っ張り操作されてテンション部材40bを伝動ベルト40aに押圧作用するよう揺動操作し、伝動ベルト40aが張り状態になって正回転クラッチ40が入り状態になる。
【0034】
図8は、正転クラッチ操作具52の切り位置「切り」への操作状態を示している。この図に示すように、正転クラッチ操作具52を前記ガイド溝51aの後端側に位置させると、正転クラッチ操作具52が切り位置「切り」になる。すると、正転クラッチ操作具52は、揺動アーム61を下降揺動操作して揺動リンク63を下げ操作する。これにより、操作ケーブル64のインナーケーブルが緩め操作されてテンション部材40bを伝動ベルト40aの押圧を解除するよう揺動操作し、伝動ベルト40aが緩み状態になって正回転クラッチ40が切り状態になる。
【0035】
図4,6,7に示すように、前記逆転クラッチ操作具41は、逆回転クラッチ41のテンション部材41bに連結されており、このテンション部材41bを介して前記伝動ケース36の端部に揺動自在に支持されている。
【0036】
図8は、逆転クラッチ操作具41の入り位置「入り」への操作状態を示している。この図に示すように、逆転クラッチ操作具41を前記刈取り出力軸39の走行機体横向きの軸芯まわりに上昇揺動操作すると、逆転クラッチ操作具41が入り位置「入り」になる。すると、逆転クラッチ操作具41は、テンション部材41bを入り側に揺動操作する。これにより、テンションローラ41cが伝動ベルト41aを張り操作し、逆回転クラッチ41が入り状態になる。このとき、逆回転クラッチ41は、逆転クラッチ操作具41が入り位置「入り」に人為操作によって維持されることにより、入り状態を維持する。
【0037】
図7は、逆転クラッチ操作具54の切り位置「切り」への操作状態を示している。この図に示すように、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すると、逆転クラッチ操作具54が自然に下降揺動して切り位置「切り」になる。すると、逆転クラッチ操作具54は、テンション部材41bを切り側に揺動操作する。これにより、テンションローラ41eが伝動ベルト41aの張り操作を解除し、伝動ベルト41aが緩み状態になって逆回転クラッチ41が切り状態になる。
【0038】
図4に示すように、前記アクセル操作具53は、これの基端側を挿通した支軸57を介して支持部材58に支持されており、支軸57の走行機体横向きの軸芯まわりに揺動する。支持部材58は、操作盤51の裏面側に取り付けられている。このアクセル操作具53は、アクセル操作具53の基端部にインナーケーブルの一端側が連結された操作ケーブル(図示せず)によってエンジン20のアクセル装置(図示せず)に連動されている。
【0039】
図7は、アクセル操作具53の高速位置「高」への操作状態を示している。この図に示すように、アクセル操作具53を支軸57の走行機体横向き軸芯のまわりに操作盤51のガイド溝51b(図4参照)に沿わせて揺動操作してガイド溝51bの後端側に位置させる。すると、アクセル操作具53は、高速位置「高」になってアクセル装置を高速状態に操作する。これにより、エンジン20が作業用に設定した高回転数で回転する作業用高速状態になる。
【0040】
図8は、アクセル操作具53の低速位置「低」への操作状態を示している。この図に示すように、アクセル操作具53を前記ガイド溝51bの前端側に位置させる。すると、アクセル操作具53は、低速位置「低」になってアクセル装置を低速状態に操作する。これにより、エンジン20が刈取り部10の逆転駆動用に設定した低回転数で回転する非作業用低速状態になる。
【0041】
図4,6,7に示すように、前記操作部は、前記揺動アーム61に一端側が連結した帯板材によって構成された牽制体71を有した牽制機構70と、前記アクセル操作具53に連結した屈曲杆体によって構成された高速逆転牽制体81を有した高速逆転牽制機構80とを備えている。
【0042】
前記牽制機構70は、前記牽制体71を備える他、前記テンション部材41bから前記操作盤51の上面側に向かって延出した屈曲杆72によって構成した当たり部73を備えて構成してある。
【0043】
牽制体71は、前記揺動アーム61に連結した帯板材で構成してあることにより、揺動アーム61と回転支軸55とを介して正転クラッチ操作具52に支持されており、正転クラッチ操作具52と一体移動する。当たり部73は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。
【0044】
図7は、牽制機構70の作用状態での側面図である。この図に示すように、正転クラッチ操作具52が入り位置「入り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さと同じ配置高さに上昇操作される。すると、牽制体71は、帯板材の端部で成る牽制作用部71aが前記当たり部73の移動経路に入り込んだ作用位置になる。これにより、牽制体71は、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部71aと前記当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への移動を不能にする。
【0045】
つまり、牽制機構70は、正回転クラッチ40が入り状態にあると、牽制体71の牽制作用部71aと、逆転クラッチ操作具54が備える当たり部73との当接によって逆転クラッチ操作具54の入り位置「入り」への切り換わりを牽制し、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
【0046】
図8は、牽制機構70の解除状態での側面図である。この図に示すように、正転クラッチ操作具52が切り位置「切り」に操作されると、牽制体71が揺動アーム61によって操作盤51の配置高さよりも低い位置に下げ操作される。すると、牽制体71は、前記当たり部73の移動経路からこれの外部に退避した解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の前記当たり部73と前記牽制作用部71aとの当接を回避する。
【0047】
つまり、牽制機構70は、正回転クラッチ40が切り状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
【0048】
前記高速逆転牽制機構80は、前記高速逆転牽制体81を備える他、前記屈曲杆72によって構成した当たり部82を備えて構成してある。
【0049】
高速逆転牽制体81は、アクセル操作具53に連結した屈曲杆で構成してあることにより、アクセル操作具53に支持されており、アクセル操作具53と一体移動する。当たり部82は、逆転クラッチ操作具54が連結しているテンション部材41bから延出した屈曲杆72によって構成してあることにより、逆転クラッチ操作具54と一体移動するよう逆転クラッチ操作具54に設けた状態になっている。高速逆転牽制体81は、これを構成する屈曲杆体の屈曲部で成る牽制作用部83を備えている。この高速逆転牽制体81は、アクセル操作具53に連結している部位と前記牽制作用部83との間に位置する部位で、前記操作盤51に支持されたホルダー84に移動自在に維持されている。ホルダ−84は、前記操作盤51に支持されている。
【0050】
図7は、高速逆転牽制機構80の作用状態での側面図である。この図に示すように、アクセル操作具53が高速位置「高」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体後方側に移動操作される。すると、高速逆転牽制体81は、作用位置になり、逆転クラッチ操作具54を切り位置「切り」から入り位置「入り」に切り換え操作しようとすると、前記牽制作用部83と前記当たり部82との当接によって逆転クラッチ操作具54の入り位置「入り」への移動に抵抗を付与する。
【0051】
つまり、高速逆転牽制機構80は、エンジン20が作業用高速状態にあると、高速逆転牽制体81の牽制作用部83と、逆転クラッチ操作具54が備える当たり部82との当接によって逆転クラッチ操作具54を入り位置「入り」に移動しにくくし、これによって逆回転クラッチ41の入り状態への切り換わりを牽制するよう作用状態になる。
【0052】
図8は、高速逆転牽制機構80の解除状態での側面図である。この図に示すように、アクセル操作具53が低速位置「低」に操作されると、高速逆転牽制体81がアクセル操作具53によって走行機体前方側に移動操作される。すると、高速逆転牽制体81は、解除位置になり、逆転クラッチ操作具54が切り位置「切り」から入り位置「入り」に切り換え操作される際の高速逆転牽制体81の牽制作用部83と逆転クラッチ操作具54の当たり部82との当接を回避する。
【0053】
つまり、高速逆転牽制機構80は、エンジン20が非作業用低速状態にあると、逆転クラッチ操作具54の入り位置「入り」への切り換え牽制を解除し、これによって逆回転クラッチ41の入り状態への切り換わり牽制を解除するよう解除状態になる。
【0054】
つまり、作業を行う場合、アクセル操作具53を高速位置「高」に操作し、逆転クラッチ操作具54を切り位置「切り」に操作し、正転クラッチ操作具52を入り位置「入り」に操作する。すると、エンジン20が作業用高速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達されてこのケース入力軸37が駆動され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されてこの刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が入り状態になってケース入力軸37の駆動力が正回転クラッチ40によって刈取り入力軸42に伝達され、逆回転クラッチ41が切り状態になって刈取り出力軸39の駆動力が刈取り入力軸42に伝達されず、刈取り入力軸42が正回転方向に作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が正回転方向に作業に適切な回転速度で駆動される。
【0055】
刈取り部10に穀稈詰まりが発生した場合、アクセル操作具53を低速位置「低」に切り換え操作し、正転クラッチ操作具52を切り位置「切り」に切り換え操作し、逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。このとき、アクセル操作具53の低速位置「低」への切り換え操作を行って高速逆転牽制機構80による逆転クラッチ41の切り換え牽制を解除し、かつ正転クラッチ操作具52の切り位置「切り」への切り換え操作を行って牽制機構70による逆回転クラッチ41の切り換え牽制を解除した後に逆転クラッチ操作具54を入り位置「入り」に切り換え操作する。
【0056】
すると、エンジン20が非作業用低速状態で回転し、エンジン20の出力軸20aからの駆動力がベルト伝動機構25と唐箕駆動軸26とベルト伝動機構35とを介して伝動ケース36のケース入力軸37に伝達され、このケース入力軸37の駆動力がベベルギヤ機構43を介して刈取り出力軸39に伝達されて、この刈取り出力軸39がケース入力軸37の回転方向とは逆の回転方向に駆動される。正回転クラッチ40が切り状態になってケース入力軸37の駆動力が刈取り入力軸42に伝達されず、逆回転クラッチ41が入り状態になって刈取り出力軸39の駆動力が逆回転クラッチ41によって刈取り入力軸42に伝達され、刈取り入力軸42が逆回転方向に非作業用回転速度で駆動される。この刈取り入力軸42の駆動力がフィーダコンベヤ11の搬送終端側に直接に、伝動チェーン44を介して刈り取り装置16の駆動軸45に、伝動チェーン44と伝動チェーン47とを介してオーガ18の駆動軸46に、伝動チェーン44と伝動チェーン47と伝動ベルト50とを介して回転リール17の駆動軸48にそれぞれ伝達され、フィーダコンベヤ11a、オーガ18、刈取り装置16、回転リール17が逆回転方向に詰まり解消に適切な回転速度で駆動され、穀稈詰まりの解消が容易となる。このとき、逆転クラッチ操作具54を入り位置「入り」に人為的に維持操作している間だけ、逆回転クラッチ41が入り状態になって刈取り部10が逆転駆動され、逆転クラッチ操作具54の入り位置「入り」への維持操作を解除すれば、逆転クラッチ操作具54が自然に切り位置「切り」に切り換わり、逆回転クラッチ41が切り状態になって刈取り部10の逆転駆動が停止する。
【0057】
図5は、前記伝動チェーン44を有したチェーン伝動機構の側面図である。この図に示すように、前記チェーン伝動機構は、前記伝動チェーン44が案内されるよう巻回されたガイド輪体89を備え、前記フィーダ11の横側壁部11bに支持されたテンションアーム91を有したチェーン緊張機構90を備えている。
【0058】
図5,10に示すように、前記チェーン緊張機構90は、前記テンションアーム91を備える他、このテンションアーム91に連結されたスプリング92を備えて構成してあり、前記スプリング92によってテンションアーム91を支軸93のまわりに揺動付勢し、これによってテンションアーム91が備える遊転自在なテンション輪体94を伝動チェーン44に押圧付勢することにより、伝動チェーン44に緊張力を付与している。
【0059】
前記スプリング92のテンションアーム91に連結している側とは反対側は、前記フィーダ11の横側壁部11bにブラケット95を介して支持されたスプリング支持杆96に連結されている。前記テンション輪体94は、前記伝動チェーン44のうち、刈取り部10の正転駆動時に緩み側となる部位44aに作用している。前記テンションアーム91は、このテンションアーム91と前記スプリング支持杆96とにわたって取り付けた緊張規制体97を備えている。
【0060】
図9,10に示すように、前記緊張規制体97と前記スプリング支持杆96とは、連結ピン98を介して相対回動自在に連結している。前記緊張規制体97と前記テンションアーム91とは、前記テンション輪体94を遊転自在に支持する支軸99によって連結している。前記支軸99は、緊張規制体97に設けた規制長孔100を摺動自在に挿通している。
【0061】
図9(イ)は、刈取り部10が正転駆動された場合でのテンション輪体94のチェーン緊張操作状態を示す。この図に示すように、刈取り部10が正転駆動された場合、伝動チェーン44のテンション輪体94が作用する部位44aが緩み側になる。すると、テンション輪体94は、スプリング92による引っ張り操作によってチェーン部位44aを張り操作する。
【0062】
図9(ロ)は、刈取り部10が逆転駆動された場合の緊張規制体97の作用状態を示す。この図に示すように、刈取り部10が逆転駆動された場合、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制する。これにより、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bがガイド林体9から外れにくくなる。
【0063】
つまり、伝動チェーン44のテンション輪体94が作用する部位44aが張り側となると、この張り力のためにテンション輪体94がスプリング92に抗して移動操作される。すると、緊張規制体97は、テンション輪体94のスプリング92に抗して移動を規制するよう支軸99を介してテンション輪体94を支持する。この結果、緊張規制体97は、刈取り部10の逆転駆動のために伝動チェーン44の緩み側となる部位44bにガイド輪体89から外れるような大幅な緩みが発生しないようこの部位44bの緩み代を抑制する。
【0064】
〔別実施例〕
上記した実施例の牽制機構70に替え、牽制体71を逆転クラッチ操作具54に設け、正転クラッチ操作具52に当たり部を設けた構成の牽制機構を採用して実施してもよい。この場合も、本発明の目的を達成することができる。
【符号の説明】
【0065】
10 刈取り部
40 正回転クラッチ
41 逆回転クラッチ
52 正転クラッチ操作具
54 逆転クラッチ操作具
70 牽制機構
71 牽制体
73 当たり部
【特許請求の範囲】
【請求項1】
刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインであって、
前記正回転クラッチを切換え操作する正転クラッチ操作具と、前記逆回転クラッチを切換え操作する逆転クラッチ操作具とを別々に設け、
前記正回転クラッチが入り状態にあると、前記逆回転クラッチの入り状態への切換え操作を牽制した作用状態に切り換わり、前記正回転クラッチが切り状態にあると、前記牽制を解除した解除状態に切り換わる牽制機構を設けてあるコンバイン。
【請求項1】
刈取り部に正回転駆動力を伝達する正回転クラッチと、前記刈取り部に逆回転駆動力を伝達する逆回転クラッチとを備えたコンバインであって、
前記正回転クラッチを切換え操作する正転クラッチ操作具と、前記逆回転クラッチを切換え操作する逆転クラッチ操作具とを別々に設け、
前記正回転クラッチが入り状態にあると、前記逆回転クラッチの入り状態への切換え操作を牽制した作用状態に切り換わり、前記正回転クラッチが切り状態にあると、前記牽制を解除した解除状態に切り換わる牽制機構を設けてあるコンバイン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−99354(P2013−99354A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−16045(P2013−16045)
【出願日】平成25年1月30日(2013.1.30)
【分割の表示】特願2012−3927(P2012−3927)の分割
【原出願日】平成19年4月20日(2007.4.20)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年1月30日(2013.1.30)
【分割の表示】特願2012−3927(P2012−3927)の分割
【原出願日】平成19年4月20日(2007.4.20)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]