
コンバータ制御装置
【課題】モータを駆動する駆動回路のコンバータにおいて発生する電圧サージを抑制する。
【解決手段】制御装置1が、リアクトル102に流れる電流値、コンバータ10の昇圧値、モータ109又は110のトルク、及びインバータ108の制御モードに基づいて、IGBT103がオンしている期間を長くする制御を行うことでシステム電圧VHに発生する電圧サージを抑制する。
【解決手段】制御装置1が、リアクトル102に流れる電流値、コンバータ10の昇圧値、モータ109又は110のトルク、及びインバータ108の制御モードに基づいて、IGBT103がオンしている期間を長くする制御を行うことでシステム電圧VHに発生する電圧サージを抑制する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータの駆動回路に含まれるコンバータの制御装置に関する。特に、コンバータで発生する電圧サージを抑制する技術に関する。
【背景技術】
【0002】
ハイブリッド車や電気自動車は、エンジンを駆動させて動力源とするとともに、バッテリからの直流電圧をインバータ回路により交流電圧に変換し、モータを回転させて動力源とする。バッテリの出力電圧だけでは、モータを駆動するための十分な電圧を供給することは困難であるため、バッテリの直流電圧をコンバータにより昇圧し、インバータ回路に供給してモータを駆動するのが一般的である。
【0003】
このようなモータの駆動回路においては、コンバータやインバータが有するスイッチング素子のオンオフ動作により、瞬間的な高電圧のノイズである電圧サージが発生する。電圧サージは、回路素子を破壊したりモータの挙動に影響を与えたりする等、様々な悪影響を及ぼす。従って、モータの駆動回路において、電圧サージを抑制することが課題となっている。
【0004】
例えば、特許文献1には、インバータのスイッチング素子を高速でオンオフさせた場合に発生する電圧サージを、コンバータのスイッチング素子を制御し、システム電圧を低減させることで電圧サージを抑制する制御装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−017716号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ハイブリッド車や電気自動車には、2つのモータを有するものが存在する。2つのモータを有するハイブリッド車や電気自動車においては、一方のモータが力行動作をしているときに、他方のモータで回生動作を行うことができる。ここで、力行とは直流電源側からモータ側に電力を供給することをいい、回生とはモータから直流電源側に電力を供給することをいう。
【0007】
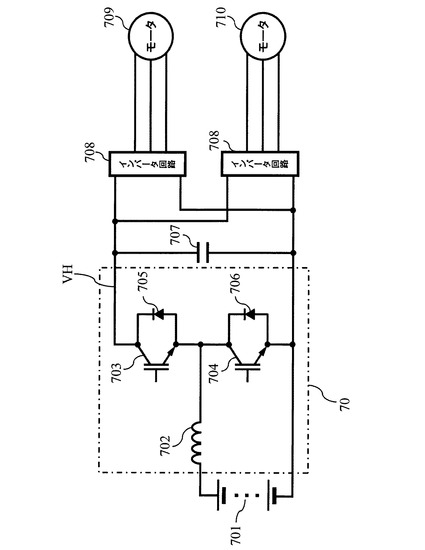
図7は、2つのモータを駆動する駆動回路の概略を示した図である。図7に示すように、コンバータ70は、直列に接続された2つのIGBT703及び704と、IGBT703に逆並列に接続されたダイオード705、IGBT704に逆並列に接続されたダイオード706、IGBT703とIGBT704との中点と直流電源701の正極との間に設けられるリアクトル702、を有する。また、コンバータ70の出力にコンデンサ707が接続され、コンバータ70の出力電圧であるシステム電圧VHは、2つのインバータ708で交流電圧に変換され、モータ709及び710に供給される。コンバータ70では、直流電源701の電圧を昇圧してモータ側へ供給することもできるし、モータの回生動作により出力される電圧を降圧して直流電源701に供給することもできる。コンバータ70のように、リアクトルを有するコンバータにおいては、リアクトルに流れる電流値が0近傍になると、以下に説明するように、コンバータの出力電圧であるシステム電圧VHに電圧サージが発生する。
【0008】
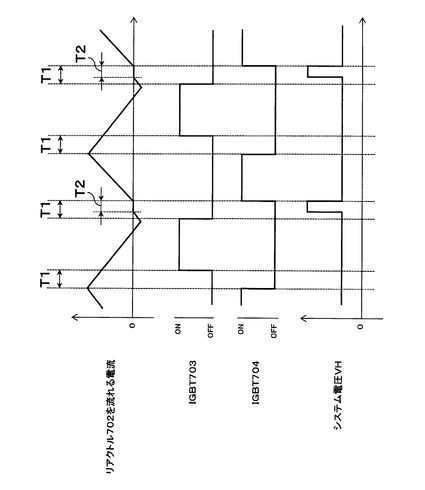
図8は、リアクトル702を流れる電流が0近傍のときの、リアクトル702を流れる電流値及びシステム電圧VHの変化の様子、並びにIGBT703、704のオンオフタイミングを例示する図である。リアクトル702を流れる電流の脈動は、IGBT703及びIGBT704のスイッチング動作に応じて生じるものである。リアクトル702を流れる電流が0近傍の間、この脈動の影響により電流の方向が連続して変わることになる。そして、IGBT703とIGBT704がいずれもオフである期間、すなわちデッドタイム(図8に示すT1の期間)において、リアクトル702を流れる電流が流れる方向を変えようとしても、IGBT703及びIGBT704が双方オフになっているため、電流の方向を変えることができず、リアクトル702を流れる電流は0に停滞してしまう(図8に示すT2の期間)。リアクトル702に電流が流れることができないため、リアクトル702の一端に電圧サージが発生し、システム電圧VHにも電圧サージが発生する。リアクトル702を流れる電流が0近傍のときは、上記の動作を繰り返し、電圧サージが連続して発生してしまう。
【0009】
システム電圧VHはインバータ708を介してモータ709及び710に供給される。システム電圧VHに電圧サージが発生することで、モータ709及び710に供給される電流値が変動する。モータのトルクは供給される電流値に比例するため、モータ709及び710に供給される電流値が変動するとトルクも変動してしまうことになる。
【0010】
2つのモータを有しているハイブリッド車や電気自動車においては、一方のモータが力行動作をしており、他方のモータが回生動作により、一方のモータが消費する電力と同程度の電力を発生しているときは、直流電源からモータ側に電力の供給は行われない。例えば、モータ709が力行動作を行っており、モータ710が回生動作をしており、モータ709の消費電力とモータ710の回生電力が同程度である場合、直流電源701からモータ側へ供給される電力は0近傍になる。このとき、リアクトル702を流れる電流値も0近傍になるため、システム電圧VHに電圧サージが発生し得る。
【0011】
システム電圧VHに電圧サージが発生すると、上述のように、力行動作をしている一方のモータのトルクが変動してしまう。一方のモータが力行動作をしているときは、バイブリッド車や電気自動車は走行中である場合があり、このときトルクの変動が発生すると、車両の振動等の問題を引き起こす虞がある。また、トルクの変動によりモータの回転数が変動し、回転数が共振帯(車両機構部と共振して車両の音振性能が悪化する回転数領域)に重なってしまうことで、車両の振動を引き起こす虞がある。
【0012】
特に、インバータ回路708が、応答性の良いPWM制御ではなく応答性の悪い過変調制御や矩形波制御されている場合、システム電圧VHに発生した電圧サージをインバータ回路708で吸収できずに、電圧サージの影響を大きく受けてしまう。
【0013】
そこで、本発明は、2つのモータを駆動する駆動回路のコンバータにおいて発生する電圧サージを抑制することができるコンバータ制御装置を提供することを目的とする。さらに、電圧サージを抑制することにより、モータに供給される電流値の変動及びモータのトルクの変動を抑え、車両の振動を低減することができるコンバータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
(1)本発明は、直流電源からの直流電圧を変換し、モータに交流電圧を供給するインバータに供給するコンバータを制御するコンバータ制御装置であって、前記コンバータは、一端が直流電源に接続されるリアクトル、前記リアクトルの他端とインバータの電源側との間に接続される第1スイッチング素子、及び前記リアクトルの他端と前記インバータのアース側との間に接続される第2スイッチング素子を有し、前記第1スイッチング素子及び前記第2スイッチング素子は、一方のスイッチング素子がオンするときに他方のスイッチング素子がオフするよう相補的に制御され、前記コンバータ制御装置は、前記リアクトルを流れる電流値を計測する電流計測手段と、前記コンバータの昇圧値を計測する電圧計測手段と、前記電流計測手段により計測された電流値がゼロ近傍の所定範囲内であり、かつ前記電圧計測手段により計測された昇圧値が所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御する制御手段と、を備えることを特徴とする。
【0015】
(2)上記(1)に記載のコンバータ制御装置であって、前記モータは、複数有し、前記コンバータ制御装置は、前記複数のモータのうち少なくとも1つのモータのトルクを計測するトルク計測手段をさらに有し、前記制御手段は、さらに、前記トルク計測手段により計測したトルクが所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御することが好ましい。
【0016】
(3)上記(1)又は(2)に記載のコンバータ制御装置であって、前記制御手段は、さらに、前記インバータが過変調制御又は矩形波制御されているときに、前記第1スイッチング素子のオン期間を増大制御することが好ましい。
【0017】
(4)上記(1)乃至(3)のいずれかに記載のコンバータ制御装置であって、前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフの周波数を低減させることが好ましい。
【0018】
(5)上記(1)乃至(3)のいずれかに記載のコンバータ制御装置であって、前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフのデューティ比を変更することが好ましい。
【発明の効果】
【0019】
本発明によれば、2つのモータを駆動する駆動回路のコンバータにおいて発生する電圧サージを抑制することができる。また、電圧サージを抑制することにより、モータに供給される電流値の変動及びモータのトルクの変動を抑え、車両の振動を低減することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施形態に係る制御装置及び周辺回路の概略構成を示す図である。
【図2】本発明の第1の実施形態のフローチャートを示す図である。
【図3】2つのスイッチング素子のオンオフデューティ比の変更前後のオンオフタイミングを表す図である。
【図4】2つのスイッチング素子のオンオフ周波数の低減前後のオンオフタイミングを表す図である。
【図5】本発明の第2の実施形態のフローチャートを示す図である。
【図6】本発明の第3の実施形態のフローチャートを示す図である。
【図7】2つのモータを駆動する駆動回路の概略を示した図である。
【図8】リアクトル702を流れる電流が0近傍のときの、リアクトル702を流れる電流値及びシステム電圧VHの変化の様子、並びにIGBT703及び704のオンオフタイミングを例示する図である。
【発明を実施するための形態】
【0021】
以下、図面に基づき本発明の好適な実施形態について説明する。
【0022】
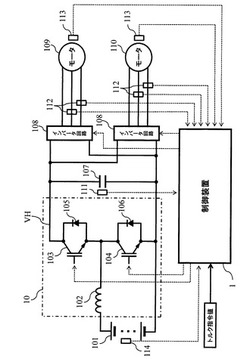
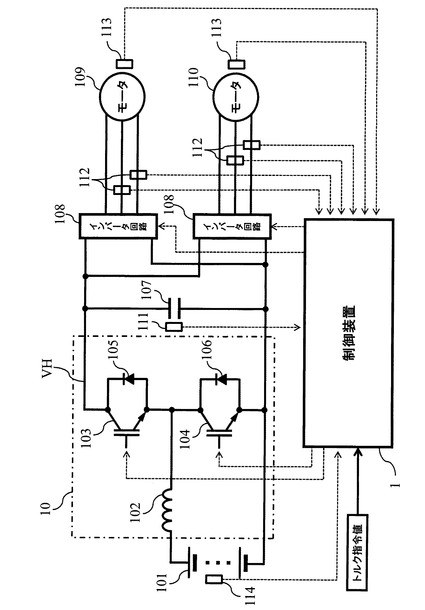
図1は、本発明の実施形態に係る制御装置及び周辺回路の概略構成を示す図である。本実施形態に係る制御装置及び周辺回路は、リチウムイオン電池等からなる直流電源101、リアクトル102、スイッチング素子であるIGBT103及び104、ダイオード105及び106、コンデンサ107、インバータ回路108、モータ109及び110、直流電源101の電圧であるバッテリ電圧を計測する電圧センサ114、システム電圧VHの電圧値を計測する電圧センサ111、インバータ回路108とモータ109及び110との間を流れる電流値を計測する電流センサ112、モータ109及び110の回転角を計測する回転角センサ113、並びにIGBT103及び104やインバータ回路108を制御する制御装置1を備える。
【0023】
IGBT103及び104は直列に接続され、ダイオード105はIGBT103に逆並列に接続され、ダイオード106はIGBT104に逆並列に接続される。リアクトル102は、IGBT103のエミッタ及びIGBT104のコレクタと、直流電源101の正極との間に接続される。リアクトル102、IGBT103及び104、並びにダイオード105及び106は、力行時においてはバッテリ電圧を昇圧してインバータ回路108に供給し、回生時においてはインバータ回路側から供給される電圧を降圧して直流電源101に供給するコンバータ10を構成している。
【0024】
インバータ回路108は、コンバータ10とモータ109及び110との間に接続される。インバータ回路108は、力行時においてはコンバータ10から供給される直流電圧を交流電圧に変換してモータ109及び110に供給し、回生時においてはモータ109及び110から供給される交流電圧を直流電圧に変換してコンバータ10に供給する。
【0025】
制御装置1は、IGBT103及び104、インバータ回路108、電圧センサ111及び114、電流センサ112、並びに回転角センサ113と接続される。
【0026】
以下、本実施形態の動作について説明する。図2は、本発明の第1の実施形態のフローチャートを示す図である。
【0027】
制御装置1は、まずリアクトル102に流れる電流値を計測する。リアクトル102に流れる電流値を計測する電流計測手段としては、リアクトル102と直列に電流計を接続して電流値を計測してもよいが、本実施形態においては、2つのモータの出力からリアクトル102に流れる電流値を計測する。モータの出力は、モータのトルクと回転数とに基づいて算出される。また、モータのトルクはモータを流れる電流値に基づいて算出され、モータの回転数は、モータの回転角に基づいて算出される。
【0028】
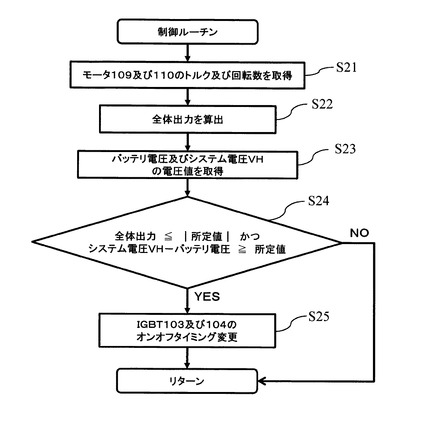
ステップS21において、制御装置1は、電流センサ112からモータ109及び110に流れる電流値を読み出し、その値に基づいてモータ109及び110のトルクを算出する。モータの各相を流れる電流値の和は0になるため、本実施形態においては、3相のうち2相にのみ電流センサが設けて電流値を計測し、残りの1相は計算により求めるようにしているが、3相全てに電流センサを設けて電流値を計測するようにしてもよい。さらに、制御装置1は、レゾルバ等の回転角センサ113からモータ109及び110の回転角を読み出し、その値基づいてモータ109及び110の回転数を算出する。
【0029】
ステップS22において、制御装置1は、ステップS21で算出したトルクと回転数からモータ109及び110の出力を算出する。そして、モータ109及び110の出力の和をとり、全体出力として算出する。なお、モータ109及び110の出力を算出するためのトルクは制御装置1に与えられるトルク指令値を用いてもよい。
【0030】
ステップS23において、制御装置1は、電圧センサ114からバッテリ電圧を、電圧センサ111からシステム電圧VHを、それぞれ読み出す。
【0031】
ステップS24において、制御装置1は、まずステップ22で算出した全体の出力の絶対値が所定値以下であるか否かを判断する。制御装置1は、全体の出力の絶対値が所定値以下、すなわち0近傍の所定範囲内である場合に、リアクトル102を流れる電流が0近傍の所定範囲内であると判断する。モータ109が力行動作を行い、モータ110が回生動作を行っている場合を例にとると、全体の出力であるモータ109及び110の和が0近傍の所定範囲内であるということは、モータ109で消費される電力と同等の電力をモータ110が回生動作により発生していることになる。このとき、直流電源101からモータ側へ供給される電力が0近傍になり、リアクトル102を流れる電流も0近傍となる。このように、本実施形態の電流検出手段は、モータ109及び110の出力に基づいて、リアクトル102を流れる電流値を計測する。具体的には、リアクトル102を流れる電流が0近傍の所定範囲内であることを検出する。
【0032】
次に、制御装置1はシステム電圧VHとバッテリ電圧との差、すなわちコンバータ10の昇圧値が所定値以上であるか否かを判断する。コンバータ10が昇圧していないとき、すなわちシステム電圧VHとバッテリ電圧との差が0近傍のときは、リアクトル102に電磁エネルギが蓄積されていない。そのため、リアクトル102に流れる電流値が0近傍になり、デッドタイム中に電流の向きが変わってもシステム電圧VHに電圧サージは発生しない。従って、コンバータ10が昇圧動作をしていない場合は、電圧サージを抑制する必要が無いため、制御装置1はシステム電圧VHが所定値以上であるか否かを判断する。
【0033】
ステップS24において上述の2つの要件を満たしたとき、ステップS25において、制御装置1は、IGBT103及び104のオンオフのタイミングを変更し、システム電圧VHの電圧サージを抑制する制御手段を行う。
【0034】
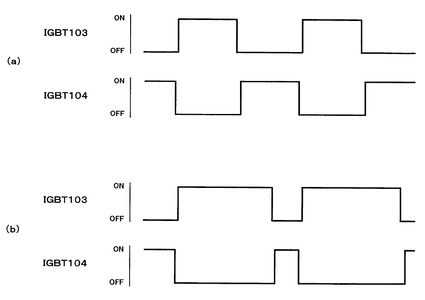
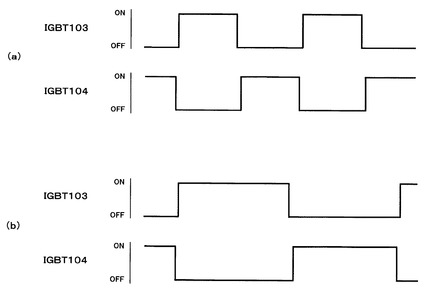
システム電圧VHに発生する電圧サージを抑制する第1の制御方法は、IGBT103及び104のオンオフのデューティ比を変更して、システム電圧VHを低減する方法である。図3は、2つのスイッチング素子のオンオフデューティ比の変更前後のオンオフタイミングを表す図である。図3(a)はオンオフデューティ比の変更前の2つのスイッチング素子のオンオフタイミングを表し、図3(b)はオンオフデューティ比の変更後の2つのスイッチング素子のオンオフタイミングを表す。図3(a)及び(b)に示すように、2つのスイッチング素子のオンオフの1周期において、IGBT103がオンしている期間をより多くしIGBT104がオンしている期間を短くすることで、システム電圧VHを低減することができる。システム電圧VHを低減することにより、電圧サージを直接抑制することができる。
【0035】
システム電圧VHに発生する電圧サージを抑制する第2の制御方法は、IGBT103及び104のオンオフの周波数を低減させる方法である。図4は、2つのスイッチング素子のオンオフ周波数の低減前後のオンオフタイミングを表す図である。図4(a)はオンオフの周波数を低減させる前の2つのスイッチング素子のオンオフタイミングを表し、図3(b)はオンオフの周波数を低減させた後の2つのスイッチング素子のオンオフタイミングを表す。第2の制御方法においては、図4(a)及び(b)に示すように、2つのスイッチング素子のオンオフのデューティ比は変えずに、オンオフの周波数を低減している。上述の通り、電圧サージは、デッドタイム中にリアクトル102を流れる電流の向きが変わるときに発生するものである。従って、単位時間当たりのデットタイムの期間を短くすれば、電圧サージが発生する機会を少なくすることができ、電圧サージを抑制することができる。そこで、第2の制御方法では、IGBT103及び104のオンオフの周波数を低減させることで、単位時間当たりのデッドタイムの期間を短くし、システム電圧VHに発生する電圧サージを抑制する。
【0036】
このように、リアクトル102を流れる電流値とコンバータ10の昇圧値に基づいて電圧サージを抑制する制御を行うことで、電圧サージが発生する部分のみを抽出して効果的な電圧サージの抑制を行うことができる。なお、ステップ24において上述の2つの要件を満たさないときは、IGBT103及び104のオンオフのタイミングの変更は行わない。
【0037】
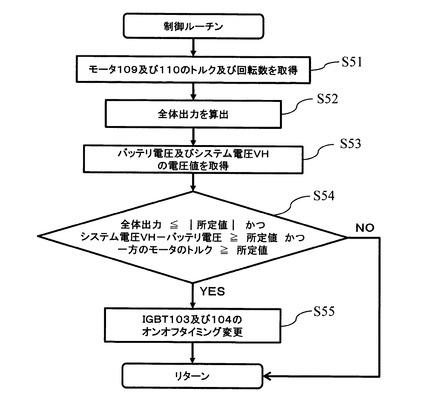
図5は、本発明の第2の実施形態のフローチャートを示す図である。第2の実施形態は、第1の実施形態と比べて、電圧サージを抑制する制御を行う条件に、少なくとも1つのモータのトルクを加えたものである。電圧サージを抑制する制御を行う条件以外については、第1の実施形態と同様であるので、重複する説明は省略する。
【0038】
ステップS54において、制御装置1は、第1の実施形態と同様に、全体の出力の絶対値が所定値以下であるか否か、及びコンバータ10の昇圧値が所定値以上であるか否かを判断する。第2の実施形態では、さらに、少なくとも一方のモータのトルクが所定値以上であるか否かを判断する。例えば、モータ109が力行動作を行っており、モータ110が回生動作を行っている場合、一方のモータとは、力行動作を行っているモータ109である。力行動作を行っているモータ109のトルクが所定値以上である場合、電圧サージによるトルクの変動の影響を受けやすく、車両の振動をより引き起こしやすくなる。第2の実施形態は、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制するものである。
【0039】
上述のように、電圧サージを低減させる第1の制御方法は、システム電圧VHを低減させるものであるが、システム電圧VHを低減させるとシステム全体の容量の低下を招いてしまう。また、電圧サージを低減させる第2の制御方法は、IGBT103及び104のオンオフの周波数を低減させるものであるが、IGBT103及び104のオンオフの周波数を低減させるとシステム電圧VHのリプルが大きくなり、リアクトルの損失や騒音が大きくなってしまう。このように、IGBT103及び104のオンオフタイミングを変更することで電圧サージを低減することができるが、一方でデメリットが発生するため、電圧サージを抑制する制御を行う条件は必要最低限に抑えるのが好ましい。
【0040】
第2の実施形態においては、リアクトル102に流れる電流値が所定値以下であり、コンバータ10の昇圧値が所定値以上であって、かつ少なくとも一方のモータのトルクが所定値であるときに電圧サージを抑制する制御を行う。すなわち、一方のモータのトルクが大きいため、電圧サージの影響によるトルクの変動が大きく、車両の振動をより起こしやすいときにのみIGBT103及び104のオンオフタイミングを変更してシステム電圧VHに発生した電圧サージを低減する。このように、電圧サージが発生してもモータのトルクに与える影響が小さい場合は電圧サージを抑制する制御を行わず、モータのトルクに与える影響が大きい場合にのみ電圧サージを抑制する制御を行うことで、電圧サージによる車両の振動を抑えつつ、電圧サージを抑制することによるデメリットも抑えることができる。
【0041】
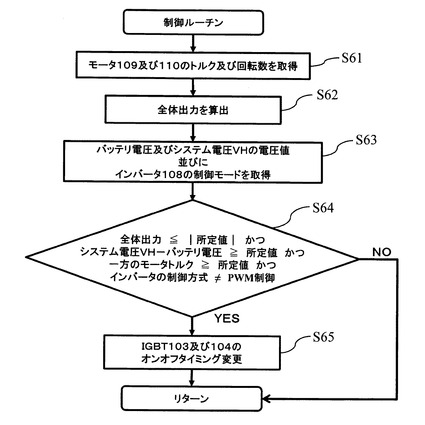
図6は、本発明の第3の実施形態のフローチャートを示す図である。第3の実施形態は、第2の実施形態と比べて、さらに、電圧サージを抑制する制御を行う条件にインバータ回路108の制御モードを加えたものである。電圧サージを抑制する制御を行う条件以外については、第1及び第2の実施形態と同様であるので、重複する説明は省略する。
【0042】
ステップS64において、制御装置1は、第2の実施形態と同様に、全体の出力の絶対値が所定値以下であるか否か、コンバータ10の昇圧値が所定値以上であるか否か、及び一方のモータのトルクが所定値以上であるか否かを判断する。第3の実施形態では、さらに、インバータ回路108の制御モードが、PWM制御でないか否か、すなわち、過変調制御又は矩形波制御であるか否かを判断する。上述の通り、PWM制御に比べて、過変調制御及び矩形波制御は応答性が悪く、システム電圧VHに発生した電圧サージの影響を受けやすい。そのため、モータ109が力行動作を行っており、モータ110が回生動作を行っている場合を例にとると、電圧サージにより、モータ109に供給する電流が変動しやすく、すなわちモータ109のトルクが変動しやすく、車両の変動をより引き起こしやすくなる。第3の実施形態は、第2の実施形態同様、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制するものである。
【0043】
第3の実施形態においては、IGBT103及び104のオンオフタイミングを変更する条件として、全体の出力の絶対値が所定値以下であり、かつシステム電圧VHが所定値以上であり、かつ一方のモータのトルクが所定値以上であり、かつインバータ回路108の制御モードが過変調制御又は矩形波制御であることとしたが、モータのトルクが所定値以上であるか否かを判断せず、全体の出力の絶対値が所定値以下であり、かつシステム電圧VHが所定値以上であり、かつインバータ回路108の制御モードが過変調制御又は矩形波制御であるときにIGBT103及び104のオンオフタイミングを変更して電圧サージを抑制するようにしてもよい。このようにしても、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制することができる。
【符号の説明】
【0044】
1 制御装置、10 コンバータ、101,701 直流電源、102,702 リアクトル、103,104,703,704 IGBT、105,106,705,706 ダイオード、107,707 コンデンサ、108,708 インバータ回路、109,110,709,710 モータ、111,114 電圧センサ、112 電流センサ、113 回転角センサ。
【技術分野】
【0001】
本発明は、モータの駆動回路に含まれるコンバータの制御装置に関する。特に、コンバータで発生する電圧サージを抑制する技術に関する。
【背景技術】
【0002】
ハイブリッド車や電気自動車は、エンジンを駆動させて動力源とするとともに、バッテリからの直流電圧をインバータ回路により交流電圧に変換し、モータを回転させて動力源とする。バッテリの出力電圧だけでは、モータを駆動するための十分な電圧を供給することは困難であるため、バッテリの直流電圧をコンバータにより昇圧し、インバータ回路に供給してモータを駆動するのが一般的である。
【0003】
このようなモータの駆動回路においては、コンバータやインバータが有するスイッチング素子のオンオフ動作により、瞬間的な高電圧のノイズである電圧サージが発生する。電圧サージは、回路素子を破壊したりモータの挙動に影響を与えたりする等、様々な悪影響を及ぼす。従って、モータの駆動回路において、電圧サージを抑制することが課題となっている。
【0004】
例えば、特許文献1には、インバータのスイッチング素子を高速でオンオフさせた場合に発生する電圧サージを、コンバータのスイッチング素子を制御し、システム電圧を低減させることで電圧サージを抑制する制御装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−017716号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ハイブリッド車や電気自動車には、2つのモータを有するものが存在する。2つのモータを有するハイブリッド車や電気自動車においては、一方のモータが力行動作をしているときに、他方のモータで回生動作を行うことができる。ここで、力行とは直流電源側からモータ側に電力を供給することをいい、回生とはモータから直流電源側に電力を供給することをいう。
【0007】
図7は、2つのモータを駆動する駆動回路の概略を示した図である。図7に示すように、コンバータ70は、直列に接続された2つのIGBT703及び704と、IGBT703に逆並列に接続されたダイオード705、IGBT704に逆並列に接続されたダイオード706、IGBT703とIGBT704との中点と直流電源701の正極との間に設けられるリアクトル702、を有する。また、コンバータ70の出力にコンデンサ707が接続され、コンバータ70の出力電圧であるシステム電圧VHは、2つのインバータ708で交流電圧に変換され、モータ709及び710に供給される。コンバータ70では、直流電源701の電圧を昇圧してモータ側へ供給することもできるし、モータの回生動作により出力される電圧を降圧して直流電源701に供給することもできる。コンバータ70のように、リアクトルを有するコンバータにおいては、リアクトルに流れる電流値が0近傍になると、以下に説明するように、コンバータの出力電圧であるシステム電圧VHに電圧サージが発生する。
【0008】
図8は、リアクトル702を流れる電流が0近傍のときの、リアクトル702を流れる電流値及びシステム電圧VHの変化の様子、並びにIGBT703、704のオンオフタイミングを例示する図である。リアクトル702を流れる電流の脈動は、IGBT703及びIGBT704のスイッチング動作に応じて生じるものである。リアクトル702を流れる電流が0近傍の間、この脈動の影響により電流の方向が連続して変わることになる。そして、IGBT703とIGBT704がいずれもオフである期間、すなわちデッドタイム(図8に示すT1の期間)において、リアクトル702を流れる電流が流れる方向を変えようとしても、IGBT703及びIGBT704が双方オフになっているため、電流の方向を変えることができず、リアクトル702を流れる電流は0に停滞してしまう(図8に示すT2の期間)。リアクトル702に電流が流れることができないため、リアクトル702の一端に電圧サージが発生し、システム電圧VHにも電圧サージが発生する。リアクトル702を流れる電流が0近傍のときは、上記の動作を繰り返し、電圧サージが連続して発生してしまう。
【0009】
システム電圧VHはインバータ708を介してモータ709及び710に供給される。システム電圧VHに電圧サージが発生することで、モータ709及び710に供給される電流値が変動する。モータのトルクは供給される電流値に比例するため、モータ709及び710に供給される電流値が変動するとトルクも変動してしまうことになる。
【0010】
2つのモータを有しているハイブリッド車や電気自動車においては、一方のモータが力行動作をしており、他方のモータが回生動作により、一方のモータが消費する電力と同程度の電力を発生しているときは、直流電源からモータ側に電力の供給は行われない。例えば、モータ709が力行動作を行っており、モータ710が回生動作をしており、モータ709の消費電力とモータ710の回生電力が同程度である場合、直流電源701からモータ側へ供給される電力は0近傍になる。このとき、リアクトル702を流れる電流値も0近傍になるため、システム電圧VHに電圧サージが発生し得る。
【0011】
システム電圧VHに電圧サージが発生すると、上述のように、力行動作をしている一方のモータのトルクが変動してしまう。一方のモータが力行動作をしているときは、バイブリッド車や電気自動車は走行中である場合があり、このときトルクの変動が発生すると、車両の振動等の問題を引き起こす虞がある。また、トルクの変動によりモータの回転数が変動し、回転数が共振帯(車両機構部と共振して車両の音振性能が悪化する回転数領域)に重なってしまうことで、車両の振動を引き起こす虞がある。
【0012】
特に、インバータ回路708が、応答性の良いPWM制御ではなく応答性の悪い過変調制御や矩形波制御されている場合、システム電圧VHに発生した電圧サージをインバータ回路708で吸収できずに、電圧サージの影響を大きく受けてしまう。
【0013】
そこで、本発明は、2つのモータを駆動する駆動回路のコンバータにおいて発生する電圧サージを抑制することができるコンバータ制御装置を提供することを目的とする。さらに、電圧サージを抑制することにより、モータに供給される電流値の変動及びモータのトルクの変動を抑え、車両の振動を低減することができるコンバータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
(1)本発明は、直流電源からの直流電圧を変換し、モータに交流電圧を供給するインバータに供給するコンバータを制御するコンバータ制御装置であって、前記コンバータは、一端が直流電源に接続されるリアクトル、前記リアクトルの他端とインバータの電源側との間に接続される第1スイッチング素子、及び前記リアクトルの他端と前記インバータのアース側との間に接続される第2スイッチング素子を有し、前記第1スイッチング素子及び前記第2スイッチング素子は、一方のスイッチング素子がオンするときに他方のスイッチング素子がオフするよう相補的に制御され、前記コンバータ制御装置は、前記リアクトルを流れる電流値を計測する電流計測手段と、前記コンバータの昇圧値を計測する電圧計測手段と、前記電流計測手段により計測された電流値がゼロ近傍の所定範囲内であり、かつ前記電圧計測手段により計測された昇圧値が所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御する制御手段と、を備えることを特徴とする。
【0015】
(2)上記(1)に記載のコンバータ制御装置であって、前記モータは、複数有し、前記コンバータ制御装置は、前記複数のモータのうち少なくとも1つのモータのトルクを計測するトルク計測手段をさらに有し、前記制御手段は、さらに、前記トルク計測手段により計測したトルクが所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御することが好ましい。
【0016】
(3)上記(1)又は(2)に記載のコンバータ制御装置であって、前記制御手段は、さらに、前記インバータが過変調制御又は矩形波制御されているときに、前記第1スイッチング素子のオン期間を増大制御することが好ましい。
【0017】
(4)上記(1)乃至(3)のいずれかに記載のコンバータ制御装置であって、前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフの周波数を低減させることが好ましい。
【0018】
(5)上記(1)乃至(3)のいずれかに記載のコンバータ制御装置であって、前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフのデューティ比を変更することが好ましい。
【発明の効果】
【0019】
本発明によれば、2つのモータを駆動する駆動回路のコンバータにおいて発生する電圧サージを抑制することができる。また、電圧サージを抑制することにより、モータに供給される電流値の変動及びモータのトルクの変動を抑え、車両の振動を低減することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施形態に係る制御装置及び周辺回路の概略構成を示す図である。
【図2】本発明の第1の実施形態のフローチャートを示す図である。
【図3】2つのスイッチング素子のオンオフデューティ比の変更前後のオンオフタイミングを表す図である。
【図4】2つのスイッチング素子のオンオフ周波数の低減前後のオンオフタイミングを表す図である。
【図5】本発明の第2の実施形態のフローチャートを示す図である。
【図6】本発明の第3の実施形態のフローチャートを示す図である。
【図7】2つのモータを駆動する駆動回路の概略を示した図である。
【図8】リアクトル702を流れる電流が0近傍のときの、リアクトル702を流れる電流値及びシステム電圧VHの変化の様子、並びにIGBT703及び704のオンオフタイミングを例示する図である。
【発明を実施するための形態】
【0021】
以下、図面に基づき本発明の好適な実施形態について説明する。
【0022】
図1は、本発明の実施形態に係る制御装置及び周辺回路の概略構成を示す図である。本実施形態に係る制御装置及び周辺回路は、リチウムイオン電池等からなる直流電源101、リアクトル102、スイッチング素子であるIGBT103及び104、ダイオード105及び106、コンデンサ107、インバータ回路108、モータ109及び110、直流電源101の電圧であるバッテリ電圧を計測する電圧センサ114、システム電圧VHの電圧値を計測する電圧センサ111、インバータ回路108とモータ109及び110との間を流れる電流値を計測する電流センサ112、モータ109及び110の回転角を計測する回転角センサ113、並びにIGBT103及び104やインバータ回路108を制御する制御装置1を備える。
【0023】
IGBT103及び104は直列に接続され、ダイオード105はIGBT103に逆並列に接続され、ダイオード106はIGBT104に逆並列に接続される。リアクトル102は、IGBT103のエミッタ及びIGBT104のコレクタと、直流電源101の正極との間に接続される。リアクトル102、IGBT103及び104、並びにダイオード105及び106は、力行時においてはバッテリ電圧を昇圧してインバータ回路108に供給し、回生時においてはインバータ回路側から供給される電圧を降圧して直流電源101に供給するコンバータ10を構成している。
【0024】
インバータ回路108は、コンバータ10とモータ109及び110との間に接続される。インバータ回路108は、力行時においてはコンバータ10から供給される直流電圧を交流電圧に変換してモータ109及び110に供給し、回生時においてはモータ109及び110から供給される交流電圧を直流電圧に変換してコンバータ10に供給する。
【0025】
制御装置1は、IGBT103及び104、インバータ回路108、電圧センサ111及び114、電流センサ112、並びに回転角センサ113と接続される。
【0026】
以下、本実施形態の動作について説明する。図2は、本発明の第1の実施形態のフローチャートを示す図である。
【0027】
制御装置1は、まずリアクトル102に流れる電流値を計測する。リアクトル102に流れる電流値を計測する電流計測手段としては、リアクトル102と直列に電流計を接続して電流値を計測してもよいが、本実施形態においては、2つのモータの出力からリアクトル102に流れる電流値を計測する。モータの出力は、モータのトルクと回転数とに基づいて算出される。また、モータのトルクはモータを流れる電流値に基づいて算出され、モータの回転数は、モータの回転角に基づいて算出される。
【0028】
ステップS21において、制御装置1は、電流センサ112からモータ109及び110に流れる電流値を読み出し、その値に基づいてモータ109及び110のトルクを算出する。モータの各相を流れる電流値の和は0になるため、本実施形態においては、3相のうち2相にのみ電流センサが設けて電流値を計測し、残りの1相は計算により求めるようにしているが、3相全てに電流センサを設けて電流値を計測するようにしてもよい。さらに、制御装置1は、レゾルバ等の回転角センサ113からモータ109及び110の回転角を読み出し、その値基づいてモータ109及び110の回転数を算出する。
【0029】
ステップS22において、制御装置1は、ステップS21で算出したトルクと回転数からモータ109及び110の出力を算出する。そして、モータ109及び110の出力の和をとり、全体出力として算出する。なお、モータ109及び110の出力を算出するためのトルクは制御装置1に与えられるトルク指令値を用いてもよい。
【0030】
ステップS23において、制御装置1は、電圧センサ114からバッテリ電圧を、電圧センサ111からシステム電圧VHを、それぞれ読み出す。
【0031】
ステップS24において、制御装置1は、まずステップ22で算出した全体の出力の絶対値が所定値以下であるか否かを判断する。制御装置1は、全体の出力の絶対値が所定値以下、すなわち0近傍の所定範囲内である場合に、リアクトル102を流れる電流が0近傍の所定範囲内であると判断する。モータ109が力行動作を行い、モータ110が回生動作を行っている場合を例にとると、全体の出力であるモータ109及び110の和が0近傍の所定範囲内であるということは、モータ109で消費される電力と同等の電力をモータ110が回生動作により発生していることになる。このとき、直流電源101からモータ側へ供給される電力が0近傍になり、リアクトル102を流れる電流も0近傍となる。このように、本実施形態の電流検出手段は、モータ109及び110の出力に基づいて、リアクトル102を流れる電流値を計測する。具体的には、リアクトル102を流れる電流が0近傍の所定範囲内であることを検出する。
【0032】
次に、制御装置1はシステム電圧VHとバッテリ電圧との差、すなわちコンバータ10の昇圧値が所定値以上であるか否かを判断する。コンバータ10が昇圧していないとき、すなわちシステム電圧VHとバッテリ電圧との差が0近傍のときは、リアクトル102に電磁エネルギが蓄積されていない。そのため、リアクトル102に流れる電流値が0近傍になり、デッドタイム中に電流の向きが変わってもシステム電圧VHに電圧サージは発生しない。従って、コンバータ10が昇圧動作をしていない場合は、電圧サージを抑制する必要が無いため、制御装置1はシステム電圧VHが所定値以上であるか否かを判断する。
【0033】
ステップS24において上述の2つの要件を満たしたとき、ステップS25において、制御装置1は、IGBT103及び104のオンオフのタイミングを変更し、システム電圧VHの電圧サージを抑制する制御手段を行う。
【0034】
システム電圧VHに発生する電圧サージを抑制する第1の制御方法は、IGBT103及び104のオンオフのデューティ比を変更して、システム電圧VHを低減する方法である。図3は、2つのスイッチング素子のオンオフデューティ比の変更前後のオンオフタイミングを表す図である。図3(a)はオンオフデューティ比の変更前の2つのスイッチング素子のオンオフタイミングを表し、図3(b)はオンオフデューティ比の変更後の2つのスイッチング素子のオンオフタイミングを表す。図3(a)及び(b)に示すように、2つのスイッチング素子のオンオフの1周期において、IGBT103がオンしている期間をより多くしIGBT104がオンしている期間を短くすることで、システム電圧VHを低減することができる。システム電圧VHを低減することにより、電圧サージを直接抑制することができる。
【0035】
システム電圧VHに発生する電圧サージを抑制する第2の制御方法は、IGBT103及び104のオンオフの周波数を低減させる方法である。図4は、2つのスイッチング素子のオンオフ周波数の低減前後のオンオフタイミングを表す図である。図4(a)はオンオフの周波数を低減させる前の2つのスイッチング素子のオンオフタイミングを表し、図3(b)はオンオフの周波数を低減させた後の2つのスイッチング素子のオンオフタイミングを表す。第2の制御方法においては、図4(a)及び(b)に示すように、2つのスイッチング素子のオンオフのデューティ比は変えずに、オンオフの周波数を低減している。上述の通り、電圧サージは、デッドタイム中にリアクトル102を流れる電流の向きが変わるときに発生するものである。従って、単位時間当たりのデットタイムの期間を短くすれば、電圧サージが発生する機会を少なくすることができ、電圧サージを抑制することができる。そこで、第2の制御方法では、IGBT103及び104のオンオフの周波数を低減させることで、単位時間当たりのデッドタイムの期間を短くし、システム電圧VHに発生する電圧サージを抑制する。
【0036】
このように、リアクトル102を流れる電流値とコンバータ10の昇圧値に基づいて電圧サージを抑制する制御を行うことで、電圧サージが発生する部分のみを抽出して効果的な電圧サージの抑制を行うことができる。なお、ステップ24において上述の2つの要件を満たさないときは、IGBT103及び104のオンオフのタイミングの変更は行わない。
【0037】
図5は、本発明の第2の実施形態のフローチャートを示す図である。第2の実施形態は、第1の実施形態と比べて、電圧サージを抑制する制御を行う条件に、少なくとも1つのモータのトルクを加えたものである。電圧サージを抑制する制御を行う条件以外については、第1の実施形態と同様であるので、重複する説明は省略する。
【0038】
ステップS54において、制御装置1は、第1の実施形態と同様に、全体の出力の絶対値が所定値以下であるか否か、及びコンバータ10の昇圧値が所定値以上であるか否かを判断する。第2の実施形態では、さらに、少なくとも一方のモータのトルクが所定値以上であるか否かを判断する。例えば、モータ109が力行動作を行っており、モータ110が回生動作を行っている場合、一方のモータとは、力行動作を行っているモータ109である。力行動作を行っているモータ109のトルクが所定値以上である場合、電圧サージによるトルクの変動の影響を受けやすく、車両の振動をより引き起こしやすくなる。第2の実施形態は、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制するものである。
【0039】
上述のように、電圧サージを低減させる第1の制御方法は、システム電圧VHを低減させるものであるが、システム電圧VHを低減させるとシステム全体の容量の低下を招いてしまう。また、電圧サージを低減させる第2の制御方法は、IGBT103及び104のオンオフの周波数を低減させるものであるが、IGBT103及び104のオンオフの周波数を低減させるとシステム電圧VHのリプルが大きくなり、リアクトルの損失や騒音が大きくなってしまう。このように、IGBT103及び104のオンオフタイミングを変更することで電圧サージを低減することができるが、一方でデメリットが発生するため、電圧サージを抑制する制御を行う条件は必要最低限に抑えるのが好ましい。
【0040】
第2の実施形態においては、リアクトル102に流れる電流値が所定値以下であり、コンバータ10の昇圧値が所定値以上であって、かつ少なくとも一方のモータのトルクが所定値であるときに電圧サージを抑制する制御を行う。すなわち、一方のモータのトルクが大きいため、電圧サージの影響によるトルクの変動が大きく、車両の振動をより起こしやすいときにのみIGBT103及び104のオンオフタイミングを変更してシステム電圧VHに発生した電圧サージを低減する。このように、電圧サージが発生してもモータのトルクに与える影響が小さい場合は電圧サージを抑制する制御を行わず、モータのトルクに与える影響が大きい場合にのみ電圧サージを抑制する制御を行うことで、電圧サージによる車両の振動を抑えつつ、電圧サージを抑制することによるデメリットも抑えることができる。
【0041】
図6は、本発明の第3の実施形態のフローチャートを示す図である。第3の実施形態は、第2の実施形態と比べて、さらに、電圧サージを抑制する制御を行う条件にインバータ回路108の制御モードを加えたものである。電圧サージを抑制する制御を行う条件以外については、第1及び第2の実施形態と同様であるので、重複する説明は省略する。
【0042】
ステップS64において、制御装置1は、第2の実施形態と同様に、全体の出力の絶対値が所定値以下であるか否か、コンバータ10の昇圧値が所定値以上であるか否か、及び一方のモータのトルクが所定値以上であるか否かを判断する。第3の実施形態では、さらに、インバータ回路108の制御モードが、PWM制御でないか否か、すなわち、過変調制御又は矩形波制御であるか否かを判断する。上述の通り、PWM制御に比べて、過変調制御及び矩形波制御は応答性が悪く、システム電圧VHに発生した電圧サージの影響を受けやすい。そのため、モータ109が力行動作を行っており、モータ110が回生動作を行っている場合を例にとると、電圧サージにより、モータ109に供給する電流が変動しやすく、すなわちモータ109のトルクが変動しやすく、車両の変動をより引き起こしやすくなる。第3の実施形態は、第2の実施形態同様、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制するものである。
【0043】
第3の実施形態においては、IGBT103及び104のオンオフタイミングを変更する条件として、全体の出力の絶対値が所定値以下であり、かつシステム電圧VHが所定値以上であり、かつ一方のモータのトルクが所定値以上であり、かつインバータ回路108の制御モードが過変調制御又は矩形波制御であることとしたが、モータのトルクが所定値以上であるか否かを判断せず、全体の出力の絶対値が所定値以下であり、かつシステム電圧VHが所定値以上であり、かつインバータ回路108の制御モードが過変調制御又は矩形波制御であるときにIGBT103及び104のオンオフタイミングを変更して電圧サージを抑制するようにしてもよい。このようにしても、電圧サージの影響により車両の振動をより引き起こしやすい場合にのみIGBT103及び104を制御し、電圧サージを抑制することができる。
【符号の説明】
【0044】
1 制御装置、10 コンバータ、101,701 直流電源、102,702 リアクトル、103,104,703,704 IGBT、105,106,705,706 ダイオード、107,707 コンデンサ、108,708 インバータ回路、109,110,709,710 モータ、111,114 電圧センサ、112 電流センサ、113 回転角センサ。
【特許請求の範囲】
【請求項1】
直流電源からの直流電圧を変換し、モータに交流電圧を供給するインバータに供給するコンバータを制御するコンバータ制御装置であって、前記コンバータは、一端が直流電源に接続されるリアクトル、前記リアクトルの他端とインバータの電源側との間に接続される第1スイッチング素子、及び前記リアクトルの他端と前記インバータのアース側との間に接続される第2スイッチング素子を有し、前記第1スイッチング素子及び前記第2スイッチング素子は、一方のスイッチング素子がオンするときに他方のスイッチング素子がオフするよう相補的に制御され、
前記コンバータ制御装置は、
前記リアクトルを流れる電流値を計測する電流計測手段と、
前記コンバータの昇圧値を計測する電圧計測手段と、
前記電流計測手段により計測された電流値がゼロ近傍の所定範囲内であり、かつ前記電圧計測手段により計測された昇圧値が所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御する制御手段と、
を備えることを特徴とするコンバータ制御装置。
【請求項2】
請求項1に記載のコンバータ制御装置であって、
前記モータは、複数設けられ、
前記コンバータ制御装置は、前記複数のモータのうち少なくとも1つのモータのトルクを計測するトルク計測手段をさらに有し、
前記制御手段は、さらに、前記トルク計測手段により計測したトルクが所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御することを特徴とするコンバータ制御装置。
【請求項3】
請求項1又は2に記載のコンバータ制御装置であって、
前記制御手段は、さらに、前記インバータが過変調制御又は矩形波制御されているときに、前記第1スイッチング素子のオン期間を増大制御することを特徴とするコンバータ制御装置。
【請求項4】
請求項1乃至3のいずれかに記載のコンバータ制御装置であって、
前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフの周波数を低減させることを特徴とするコンバータ制御装置。
【請求項5】
請求項1乃至3のいずれかに記載のコンバータ制御装置であって、
前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフのデューティ比を変更することを特徴とするコンバータ制御装置。
【請求項1】
直流電源からの直流電圧を変換し、モータに交流電圧を供給するインバータに供給するコンバータを制御するコンバータ制御装置であって、前記コンバータは、一端が直流電源に接続されるリアクトル、前記リアクトルの他端とインバータの電源側との間に接続される第1スイッチング素子、及び前記リアクトルの他端と前記インバータのアース側との間に接続される第2スイッチング素子を有し、前記第1スイッチング素子及び前記第2スイッチング素子は、一方のスイッチング素子がオンするときに他方のスイッチング素子がオフするよう相補的に制御され、
前記コンバータ制御装置は、
前記リアクトルを流れる電流値を計測する電流計測手段と、
前記コンバータの昇圧値を計測する電圧計測手段と、
前記電流計測手段により計測された電流値がゼロ近傍の所定範囲内であり、かつ前記電圧計測手段により計測された昇圧値が所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御する制御手段と、
を備えることを特徴とするコンバータ制御装置。
【請求項2】
請求項1に記載のコンバータ制御装置であって、
前記モータは、複数設けられ、
前記コンバータ制御装置は、前記複数のモータのうち少なくとも1つのモータのトルクを計測するトルク計測手段をさらに有し、
前記制御手段は、さらに、前記トルク計測手段により計測したトルクが所定値以上であるときに、前記第1スイッチング素子のオン期間を増大制御することを特徴とするコンバータ制御装置。
【請求項3】
請求項1又は2に記載のコンバータ制御装置であって、
前記制御手段は、さらに、前記インバータが過変調制御又は矩形波制御されているときに、前記第1スイッチング素子のオン期間を増大制御することを特徴とするコンバータ制御装置。
【請求項4】
請求項1乃至3のいずれかに記載のコンバータ制御装置であって、
前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフの周波数を低減させることを特徴とするコンバータ制御装置。
【請求項5】
請求項1乃至3のいずれかに記載のコンバータ制御装置であって、
前記制御手段は、前記第1スイッチング素子及び前記第2スイッチング素子のオンオフのデューティ比を変更することを特徴とするコンバータ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−110850(P2013−110850A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253906(P2011−253906)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]