
コンピュータプログラム、噴霧制御方法及び噴霧制御装置
【課題】複数のノズルを用いて異なる種類の溶液を精度良く噴霧することができ、厚さが均一な膜の生成を可能とするコンピュータプログラム、噴霧制御方法及び噴霧制御装置を提供する。
【解決手段】初期設定事項を受け付けて(S1)、各ノズルが移動すべき経路を作成して表示する(S2、S3)。どの溶液を噴霧するかを示すコマンド、ノズルの走査回数、溶液の吸着量のデータを受け付けて(S4)、それらを表示する(S5)。コマンドに対応するノズルに関わる間隔情報に基づいて、ノズル配置部が移動すべき補正経路を算出する(S6)。S4で受け付けたデータに基づき、S6で算出した補正経路にしたがって、噴霧部を動作させて、対応するノズルから溶液を噴霧する(S7)。
【解決手段】初期設定事項を受け付けて(S1)、各ノズルが移動すべき経路を作成して表示する(S2、S3)。どの溶液を噴霧するかを示すコマンド、ノズルの走査回数、溶液の吸着量のデータを受け付けて(S4)、それらを表示する(S5)。コマンドに対応するノズルに関わる間隔情報に基づいて、ノズル配置部が移動すべき補正経路を算出する(S6)。S4で受け付けたデータに基づき、S6で算出した補正経路にしたがって、噴霧部を動作させて、対応するノズルから溶液を噴霧する(S7)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交互吸着膜の成膜等に利用され、移動しながら夫々が異なる溶液または微粒子を噴霧する複数のノズルと洗浄を行う洗浄手段とを有する噴霧装置の動作を制御するためのコンピュータプログラム、噴霧制御方法及び噴霧制御装置に関する。
【背景技術】
【0002】
複合有機薄膜を作成する方法として、交互吸着(Layer-by-Layer Self-Assembly)を利用した方法が知られている(非特許文献1)。この方法では、初期表面電荷を与えた基板を正の電解質ポリマーや微粒子などのカチオンの水溶液及び負の電解質ポリマーや微粒子などのアニオンの水溶液に交互に浸す。基板の表面にカチオンがクーロン力により吸着されてカチオン層が形成され、カチオン層にアニオンがクーロン力により吸着されてアニオン層を形成されるという過程を経て、カチオン層とアニオン層とが交互に積層され、基板上に多層構造を有する交互吸着膜が成膜される。
【0003】
広範囲の基板の表面上に交互吸着膜を成膜する方法としては、正の電解質ポリマーであるカチオン水溶液を噴霧するスプレーと、負の電解質ポリマーであるアニオン水溶液を噴霧するスプレーとを吹き付ける方法が提案されている(非特許文献1及び2)。
【0004】
また、スプレーノズルの移動処理をコンピュータによって制御し、撥水剤である液体を噴霧する方法が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4302321号公報
【非特許文献】
【0006】
【非特許文献1】Decher.G, Hong.J.D. and J.Schmit: Thin Solid Films, 210/211, p.831(1992)
【非特許文献2】Anindarupa Chunder, Kenneth Etcheverry, Samuel Wadsworth, Glenn D.Boreman, Lei Zhai: Fabrication of anti-reflection coatings on plastics using the spraying layer-by-layer self-assembly technique, Journal of the SID, 17/4, p.389-395, 2009
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、非特許文献1及び2に記載の方法では、アニオン溶液及びカチオン溶液を均一に塗布することが難しく、また、表面に凝集物が形成され易いという問題があった。一方、特許文献1には、撥水剤コーティング装置における撥水剤を噴霧するスプレーノズルの具体的な移動制御は記載されていない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであり、複数のノズルを用いて異なる種類の溶液または微粒子を精度良く噴霧することができ、また、精度良く洗浄を行うことができ、結果として厚さが均一な膜の生成を可能とするコンピュータプログラム、噴霧制御方法及び噴霧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るコンピュータプログラムは、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を、コンピュータに制御させるためのコンピュータプログラムであって、前記コンピュータに、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップとを実行させることを特徴とする。
【0010】
本発明に係る噴霧制御方法は、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する方法であって、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップとを含むことを特徴とする。
【0011】
本発明に係る噴霧制御装置は、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する装置であって、前記第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付ける手段と、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する手段と、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御する手段とを備えることを特徴とする。
【0012】
本発明にあっては、第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付け、受け付けたデータに基づいて、第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する。そして、作成した移動すべき経路と、記憶している第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報とに基づいて、第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに洗浄手段が洗浄する際の配置部の移動を制御する。よって、移動しながら溶液または微粒子を噴霧する第1ノズル及び第2ノズル並びに洗浄を行う洗浄手段夫々を同一の経路にて簡単に移動させることができ、これらのノズル及び洗浄手段夫々の移動経路の制御を容易かつ精度良く行える。
【0013】
本発明に係るコンピュータプログラムは、前記コンピュータが表示部を有しており、前記コンピュータに、前記作成した移動すべき経路を前記表示部に表示するステップをさらに実行させることを特徴とする。
【0014】
本発明にあっては、第1ノズル、第2ノズル及び洗浄手段の作成した移動経路を表示部に表示する。よって、移動しながら溶液または微粒子を噴霧するこれらのノズル及び洗浄を行う洗浄手段の移動経路をユーザは容易に確認できる。
【0015】
本発明に係るコンピュータプログラムは、前記コンピュータに、受け付けた前記第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、前記第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、前記洗浄手段に移動経路に応じて洗浄させるための第3コマンドを、受け付けた順に前記表示部に表示するステップをさらに実行させることを特徴とする。
【0016】
本発明にあっては、第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、洗浄手段に移動経路に応じて洗浄させるための第3コマンドを受け付け、受け付けたこれらのコマンドを受け付けた順に表示部に表示する。よって、移動しながら溶液または微粒子を噴霧するこれらのノズルの噴霧動作及び洗浄を行う洗浄手段の洗浄動作の内容をユーザは容易に確認できる。
【0017】
本発明に係るコンピュータプログラムは、前記コンピュータに、受け付けた前記第1コマンドの実行回数、前記第2コマンドの実行回数、及び/または、前記第3コマンドの実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0018】
本発明にあっては、第1コマンド、第2コマンド、及び/または第3コマンド夫々の実行回数を受け付け、受け付けた実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて表示部に表示する。よって、ノズルの噴霧動作及び洗浄手段の洗浄動作の内容をユーザは容易に確認できる。
【0019】
本発明に係るコンピュータプログラムは、前記洗浄手段が、不要な物質を洗浄するリンス溶液または気体を前記対象物に噴霧する第3ノズルであり、前記コンピュータに、前記第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点を、前記作成した移動すべき経路に加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0020】
本発明にあっては、第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点も表示部に表示する。よって、移動しながら溶液、微粒子または気体を噴霧するこれらのノズルの空吹き位置をユーザは容易に確認できる。
【0021】
本発明に係るコンピュータプログラムは、前記コンピュータに、前記対象物の受け付けた形状を、前記作成した移動すべき経路及び空吹き点に加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0022】
本発明にあっては、対象物の形状を、作成したノズルの移動経路及び空吹き点に加えて表示部に表示する。よって、対象物の形状と移動経路及び空吹き点との位置関係がユーザにとって明瞭となり、ノズル夫々の移動動作の制御を簡単かつ精度良く行える。
【0023】
本発明に係るコンピュータプログラムは、前記コンピュータに、前記空吹き点が前記対象物の形状の範囲内に存在する場合に、警告を発するステップをさらに実行させることを特徴とする。
【0024】
本発明にあっては、空吹き点が対象物の形状の範囲内に存在する場合に、警告を発してユーザに知らせる。よって、不適切な空吹きを防止して、ノズル夫々の噴霧動作を精度良く行える。
【0025】
本発明に係るコンピュータプログラムは、前記間隔情報が、前記第1ノズル、第2ノズル及び洗浄手段間の距離、または、前記配置部における所定の位置から前記第1ノズル、第2ノズル及び洗浄手段夫々までの距離であることを特徴とする。
【0026】
本発明にあっては、間隔情報として、第1ノズル、第2ノズル及び洗浄手段間の距離、または、配置部における所定の位置から第1ノズル、第2ノズル及び洗浄手段夫々までの距離を用いる。よって、オフセット補正に必要である正確な間隔情報が得られる。
【発明の効果】
【0027】
本発明では、受け付けた初期設定事項のデータに基づいて、第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成し、作成した移動すべき経路と、記憶している第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報(オフセット量)とに基づいて、第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに洗浄手段が洗浄する際の配置部の移動を制御するようにしたので、移動しながら溶液または微粒子を噴霧する第1ノズル及び第2ノズル並びに洗浄を行う洗浄手段夫々を同一の経路にて簡単に移動させることができ、これらのノズル及び洗浄手段夫々の移動経路の制御を容易かつ精度良く行うことができる。そして、結果として、異なる材料からなる複数の層を積層させた交互吸着膜を、厚さが均一に短時間で生成することが可能である。
【図面の簡単な説明】
【0028】
【図1】噴霧装置の前面側を示す斜視図である。
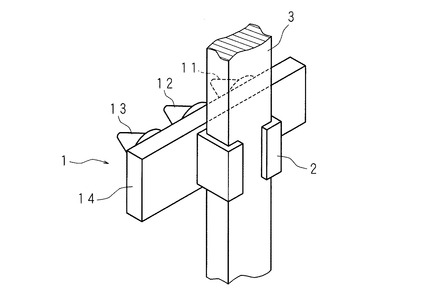
【図2】噴霧装置の後面側を示す斜視図である。
【図3】リンス用ノズル(第3ノズル)についての制御系を示した模式図である。
【図4】制御部の構成を示すブロック図である。
【図5】噴霧部の他の構成例を示す斜視図である。
【図6】噴霧部と噴霧される対象物との位置関係を示す模式図である。
【図7】経路を作成する表示画面の例示図である。
【図8】噴霧するノズルが移動する経路を示す表示画面の例示図である。
【図9】動作コマンドの例を示す図表である。
【図10】動作プログラムの表示画面の例示図である。
【図11】制御部の処理手順を示すフローチャートである。
【図12】制御部が噴霧部を動作させる処理(図11のステップS7)の手順を示すフローチャートである。
【図13】制御部が噴霧部を動作させる処理(図11のステップS7)の手順を示すフローチャートである。
【図14】噴霧装置の他の実施形態を示す模式図である。
【発明を実施するための形態】
【0029】
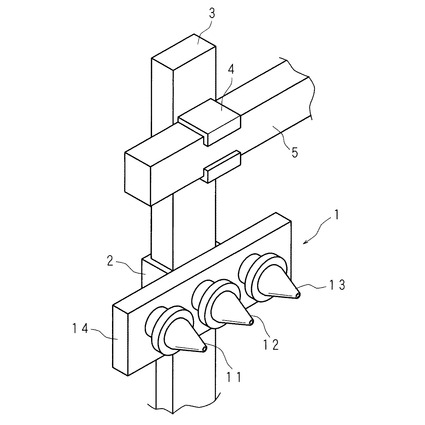
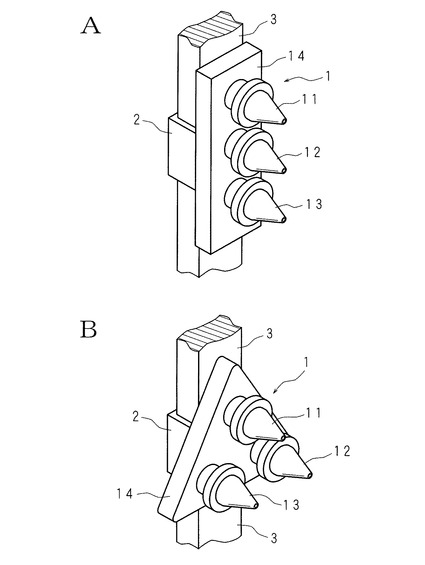
以下、本発明に係るコンピュータプログラム、噴霧制御方法及び噴霧制御装置について説明する。図1及び図2は、噴霧装置の前面側及び後面側を示す斜視図である。噴霧装置は複数種の溶液、微粒子または気体を噴霧口から噴霧する噴霧部1を備える。
【0030】
溶液の噴霧を行う噴霧部1は、カチオン溶液または微粒子を噴霧するカチオン用ノズル(第2ノズル)11、リンス溶液または気体を噴霧するリンス用ノズル(洗浄手段としての第3ノズル)12、及びアニオン溶液または微粒子を噴霧するアニオン用ノズル13(第1ノズル)を備える。カチオン溶液に用いられるカチオンとしては、正の電荷を有するイオン性ポリマーまたは正の電荷を有する微粒子等が挙げられ、アニオン溶液に用いられるアニオンとしては、負の電荷を有するイオン性ポリマーまたは負の電荷を有する微粒子等が挙げられる。
【0031】
リンス溶液には純水が用いられるが、イオン交換水、アルコール、またはアルコール及び水の混合液等であってもよい。リンス溶液を噴霧することにより、基板に静電的に吸着している量を超える量の電荷を有する物質、その他成膜に不要な物質を洗い流すので、一つの層における部分ごとの膜の厚さを均一にすることができる。また、アニオンとカチオンとが混合されることにより、物質が沈殿することがあるため、リンス溶液によって電荷を有する物質を洗い流す。
【0032】
適切なリンス時間は、用途、またはアニオン溶液、カチオン溶液の性質等に応じて異なるが、数秒以上から数十秒以下の程度であることが好ましく、リンス用ノズル12は連続して同じ経路を複数回噴霧しても良い。
【0033】
噴霧部1では、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の3つのノズルが同一の水平方向を向くように、ノズル配置部14に配置されている。ノズル配置部14は、カチオン用ノズル11とリンス用ノズル12との間隔、リンス用ノズル12とアニオン用ノズル13との間隔、及びアニオン用ノズル13とカチオン用ノズル11との間隔夫々が常に一定になるように各ノズルを配置する。ノズル配置部14が、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13を備えているので、異なる溶液を噴霧する度にノズルを取り換える必要は無く、迅速に噴霧を行うことができる。
【0034】
ノズル配置部14は、噴霧する方向と反対側に設けられた鉛直摺動部2に固定されている。鉛直摺動部2は、鉛直方向を長手方向とする四角柱状の移動柱3を幅方向に挟むようにコの字型の形状をなし、移動柱3と接触している。また、鉛直摺動部2は、接続された制御部6(図3参照)から送信される指示信号に基づいて移動柱3の長手方向に移動することができる。
【0035】
移動柱3の長手方向の上端部には水平摺動部4が固定されている。水平摺動部4は、水平方向を長手方向とする四角柱状の固定柱5を幅方向に挟むようにコの字型の形状をなし、固定柱5と接触している。また、水平摺動部4は、接続された制御部6(図3参照)から送信される指示信号に基づいて固定柱5の長手方向に移動することができる。
【0036】
こうした構成により、噴霧部1は鉛直方向及び水平方向に移動して広い範囲で噴霧を行うことができる。
【0037】
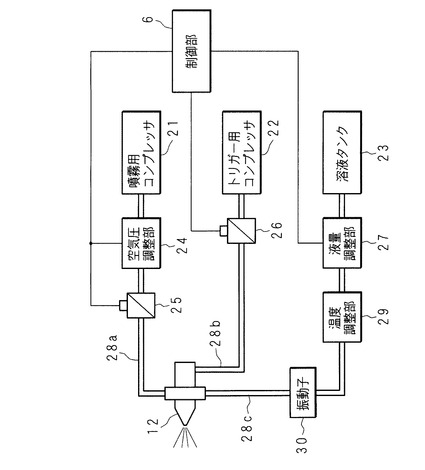
図3は、リンス用ノズル12についての制御系を示した模式図である。なお、カチオン用ノズル11及びアニオン用ノズル13についての制御系は、後述する振動子30を除いてリンス用ノズル12についての制御系と同様の構成であるので、それらの図示は省略する。
【0038】
カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の夫々のノズルには、噴霧する際の高圧な空気を供給するための噴霧用コンプレッサ21が、送気管28aを介して接続されており、また、溶液を夫々のノズルへ吸引するピストンを作動させるために高圧な空気を供給するトリガー用コンプレッサ22が、送気管28bを介して接続されており、さらに、溶液を供給するための溶液タンク23が、送液管28cを介して接続されている。
【0039】
噴霧用コンプレッサ21、トリガー用コンプレッサ22及び溶液タンク23の夫々は、他の溶液が混入しないように、アニオン用、カチオン用及びリンス用に分離されている。また、噴霧パターン調整用の管が設けられ、従って、噴霧部1では、夫々のノズルに4本の管が接続されており、全体として合計12本の管が設けられている。なお、噴霧用コンプレッサ21及びトリガー用コンプレッサ22は共用可能である。
【0040】
噴霧用コンプレッサ21と接続されている送気管28aの中途には、送気管28aを通る空気の圧力を調整する空気圧調整部24と、送気の作動及び停止を制御する2方電磁弁25とが、噴霧用コンプレッサ21側からこの順に設けられている。トリガー用コンプレッサ22と接続されている送気管28bの中途には、送気の作動、停止及び残圧を逃がすための排気を行う3方電磁弁26が設けられている。また、溶液タンク23と接続されている送液管28cの中途には、送液管28cを通る溶液の量を調整する液量調整部27が設けられている。
【0041】
制御部6は、空気圧調整部24、2方電磁弁25、3方電磁弁26及び液量調整部27を制御する。なお、噴霧の動作及び停止を円滑に行うべく、液量調整部27及び3方電磁弁26とは作動と停止とを同時に行うように構成してもよい。
【0042】
加えてリンス用ノズル12については、制御部6が2方電磁弁25を開けさせ、液量調整部27をリンス溶液が流れないように制御し、2方電磁弁25を開放して噴霧用コンプレッサ21から送気された空気をリンス用ノズル12から噴出させることにより、噴霧された溶液を乾燥させるための空気を噴出することができる。ブローの有無により得られる膜の特性及び膜厚が異なる場合があるため、膜の種類によっては乾燥が必要な場合がある。また、交互吸着膜の一部が乾燥していないことにより、不均一な部分が発生する場合が生じ得る。従って所望の成膜の性質によりブローを行う必要が生じる。
【0043】
送液管28cの中途の液量調整部27より下流側には、送液管28cを流れる溶液の温度を調整するヒータを備えた温度調整部29が設けられている。アニオンまたはカチオンに用いられる物質によっては、常温より高い温度で吸着させることにより膜厚が異なる場合があり、また、吸着の速度が異なる場合もある。従って温度を調整することにより所望の交互吸着膜を成膜することができる。また、リンス溶液についても温度を調整することで洗浄力を高めることができる。なお、温度調整部29は溶液タンク23に設けてもよく、各ノズルの内部に設けてもよい。
【0044】
さらに、リンス用ノズル12の送液管28cの中途の温度調整部29より下流側には、リンス溶液を振動させる振動子30が設けられている。振動子30によってリンス溶液を振動させることによってリンス溶液に気泡が生じる。これによりリンス溶液の洗浄効果を向上させることができる。また、リンス用ノズル12による噴霧圧、噴霧量を測定し、それらの測定値が所定値になるように、制御部6によってフィードバック制御をかけることができる。
【0045】
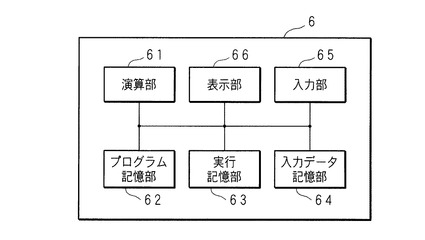
図4は、制御部6の構成を示すブロック図である。制御部6は、パーソナルコンピュータを用いて構成されており、本発明の噴霧制御装置をなす。制御部6は、演算部61と、プログラム記憶部62と、実行記憶部63と、入力データ記憶部64と、入力部65と、表示部66とを有している。
【0046】
演算部61は、CPU(Central Processing Unit)またはMPU(Micro Processing Unit)等である。プログラム記憶部62は、書き込み及び消去可能なEPROM(Erasable Programmable ROM)またはフラッシュメモリ等であり、噴霧装置が動作するために必要な種々の制御用のコンピュータプログラムを予め格納してある。演算部61は、プログラム記憶部62に記憶されている制御用のコンピュータプログラムを読み出して実行する。これにより、演算部61は、各ノズルからの溶液の噴霧を制御するためのソフトウェア的な各処理を実行する。また、演算部61は、相互に接続されたプログラム記憶部62、実行記憶部63、入力データ記憶部64、入力部65及び表示部66の動作を制御する。
【0047】
実行記憶部63は、SRAMまたはフラッシュメモリ等であり、プログラム記憶部62から読み出される制御用のコンピュータプログラムなど、制御部6(演算部61)による制御用のコンピュータプログラムの実行時に発生する種々のデータを一時的に記憶する。また、実行記憶部63は、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13間の間隔に関する間隔情報を記憶している。
【0048】
入力部65は、キーボード、タッチパネル等からなり、各種のデータ(後述する初期設定事項、コマンドなど)の入力をユーザから受け付ける。入力部65を介してデータが入力された場合、制御部6は、入力されたデータをRAMまたはフラッシュメモリ等で構成される入力データ記憶部64に記憶する。表示部66は、入力されたデータ、噴霧装置が動作する際の状態などを表示する。
【0049】
なお、噴霧部1の構成は上述した例(図1参照)に限られない。図5は、噴霧部1の他の構成例を示す斜視図である。図5Aに示す構成例では、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が、図1に示す例のように水平方向ではなく、四角柱状のノズル配置部14に夫々等間隔で鉛直方向に配置されている。また、図5Bに示す構成例では、各ノズルの中心が同一円周上に位置するように、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が、ノズル配置部14に夫々等間隔で配置されている。
【0050】
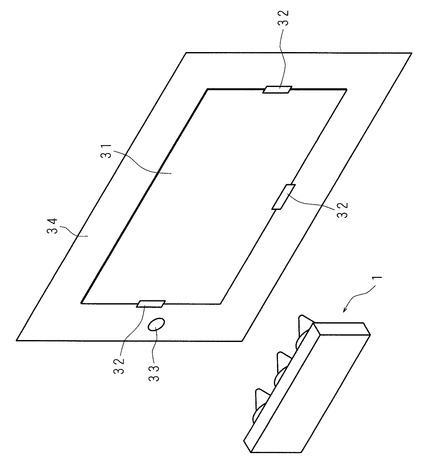
図6は、噴霧部1と噴霧される対象物31との位置関係を示す模式図である。噴霧部1の移動によって、板状の対象物31に各種の溶液の噴霧が行われる。例えば基板からなる板状の対象物31は鉛直方向に立設して留め具32により壁34に配置されている。対象物31に対して噴霧が一様に行われるように、ノズルにおける図示しない噴霧孔の大きさ、間隔及び形状等を考慮し、噴霧部1が移動することができる面状の範囲と所定の間隔を置いて対象物31は配置される。また、対象物31(基板)には加熱用のヒータが設けられている。対象物31を移動する機構を設けて、対象物31がカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13に対して相対移動可能に構成することができる。
【0051】
また、対象物31の近傍には、成膜された交互吸着膜の厚さを測定する膜厚計33が、壁に固定して設けられている。膜厚計33として、例えばQCM(Quartz Crystal Microbalance)を用いる。QCMは、水晶振動子の電極表面に物質が付着し、質量が変化することにより、振動数が変化することを利用して質量変化を測定する測定装置である。下記(1)式に示されるように、振動数の変化から算出される質量変化Δmに基づいて振動数変化Δfを算出することができる。本実施の形態では、表面積を調整することにより振動数1Hzの変化が膜厚1nmに相当するように設定する。なお、QCMを用いる場合に限らず、赤外線、X線を利用した膜厚計33を用いるようにしても良い。
【0052】
【数1】

【0053】
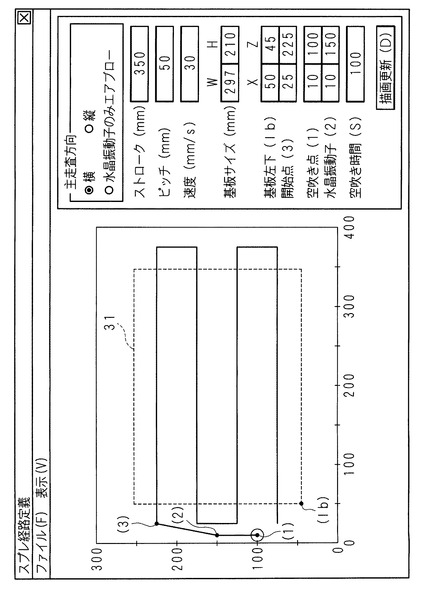
制御部6は、溶液を噴霧する際に、ノズル配置部14(噴霧する各ノズル)を移動させる移動経路をプログラムによって制御する。図7は、噴霧するノズルが移動する経路を示す表示画面の例示図である。このような表示画面は、表示部66(図4参照)に表示される。図中の太線は、長方形状の対象物31(破線にて図示)に対して噴霧部1の経路を水平方向に投影した線を表している。この線は噴霧口の位置と対応している。図7においてて、(1)は空吹き点(移動開始点)、(2)は膜厚計33(水晶振動子)の設置位置、(3)は走査開始点を夫々示している。
【0054】
まず、制御部6は、入力部65(図4参照)により入力された初期設定事項を示すデータを受け付ける。初期設定事項は水平摺動部4及び鉛直摺動部2の移動速度、対象物31の大きさや形状、その他後述する主走査方向、主走査方向の走査距離(ストローク)、走査間隔(ピッチ)等についてのデータである。
【0055】
制御部6は初期設定事項のうち、主走査方向、主走査方向の走査距離及び走査間隔に基づいて、噴霧部1の噴霧するノズルが移動する経路を作成する。図8は、噴霧するノズルが移動する経路を示す表示画面の例示図である。図8に示すように、制御部6は表示画面に対象物31(破線)及び噴霧するノズルが移動する経路(太実線)を表示させる。
【0056】
制御部6は、対象物31を噴霧するノズルを、主走査方向に走査距離だけ往復し、主走査方向の折り返し点で主走査方向と垂直な一つの方向にさらに走査間隔だけ走査させる。このように移動させることにより、対象物31の全体を噴霧する。なお、噴霧するノズルの経路は、例えば図8Aのように水平方向を主走査方向としてもよく、図8Bのように鉛直方向を主走査方向としてもよい。
【0057】
噴霧するノズルの経路は、対象物31の全ての部分で膜厚を均一にすべく、1回の経路移動中に噴霧されない範囲及び重複して噴霧される範囲が無いように定めることが望ましい。また、移動する方向の転換には時間を要するので、折り返す地点の付近では噴霧される溶液の量が多くなるため、主走査方向の移動は対象物31の主走査方向の幅よりも長い距離を移動し、折り返す地点の付近では対象物31に噴霧を行わないようにすることが望ましい。
【0058】
これらを考慮して、対象物31の大きさや形状のデータを受け付けた場合には制御部6が主走査方向の長さ、主走査方向間の距離等について演算処理を行い、経路を算出するようにしてもよい。
【0059】
アニオン層及びカチオン層の厚さはどの層も一定ではなく、層の数と膜厚とは非線形の関係にある。従って交互吸着膜を所望の厚さにしたい場合に、層の数から厚さを推定することは困難である。そこで膜厚計33で膜の厚さを測定しながら層を重ねることにより、所望の膜厚に成膜することができる。
【0060】
初期設定事項のデータを受け付けた後、噴霧するノズルが移動する経路を作成する。併せて噴霧するノズルの移動速度、移動開始点の噴霧するノズルの位置、対象物31に噴霧する前に移動開始点の位置で行われる空吹き時間等についてのデータを受け付けることにより、移動する経路を作成することができる。
【0061】
また、受け付けたデータに基づく移動開始点の噴霧部1の位置を、実行記憶部63に予め記憶されているノズル間の間隔に関する間隔情報(カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13のオフセット分)を補正して算出する。
【0062】
噴霧部1には、前述したように、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が並置されている。従って噴霧部1の位置を一定にして噴霧を行った場合、ノズルの位置の分だけオフセットが生じ、異なる位置を噴霧することになる。そこで、制御部6は、予めノズル間の間隔に関する間隔情報を実行記憶部63に記憶しておき、間隔情報により経路をオフセット量だけ補正し、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の夫々が設定された経路を移動しながら溶液を噴霧する場合には、全く同一の経路を辿るようにする。
【0063】
間隔情報は、カチオン用ノズル11及びリンス用ノズル12間の距離、リンス用ノズル12及びアニオン用ノズル13間の距離、アニオン用ノズル13及びカチオン用ノズル11間の距離でもよく、ノズル配置部14の所定の位置からカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13夫々までの距離でもよい。
【0064】
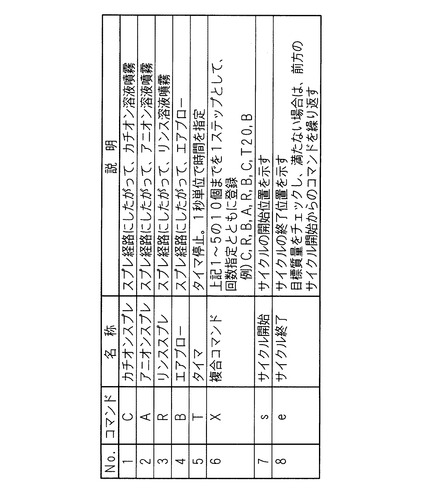
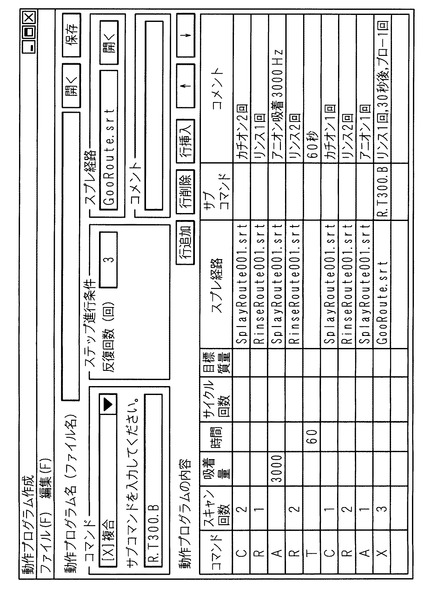
経路作成後に、制御部6は動作コマンドを入力部65から受け付ける。図9は、動作コマンドの例を示す図表であり、図10は、動作プログラムの表示画面の例示図である。このような動作プログラムの表示画面は、表示部66に表示される。コマンド「C」を受け付けることにより、カチオン溶液が噴霧される。より具体的には、コマンド「C」を受け付けた場合、制御部6は、受け付けたデータに基づく移動開始点の噴霧部1の位置から、カチオン用ノズル11のオフセットによって補正することにより算出した、補正後の移動開始点の位置にカチオン用ノズル11を配置させる。
【0065】
制御部6は、トリガー用コンプレッサ22と溶液タンク23とを作動させ、受け付けたデータに基づく所定時間だけカチオン用ノズル11に空吹きを行わせる。空吹きが終了した後、受け付けたデータに基づく噴霧圧及び移動速度に従って、カチオン用ノズル11にてカチオン溶液を継続して噴霧させながら経路を移動させる。経路の移動が終了した場合、カチオン用ノズル11は噴霧を終了する。
【0066】
また、制御部6は、コマンド「C」と併せて経路を通る回数の情報も受け付けることができる。例えば移動回数(スキャン回数)が3回であった場合、制御部6は、経路の開始点から終了点までの移動が3回に達するまで噴霧部1を移動させながら噴霧を継続させる。また、経路を同じ方向に辿るか往復するかを設定することもできる。
【0067】
同様にコマンド「A」を受け付けることによりアニオン溶液が噴霧され、コマンド「R」を受け付けることによりリンス溶液が噴霧されるように設定する。また、コマンド「B」を受け付けることによりブローが行われるように設定する。
【0068】
制御部6は、コマンド「C」及び「A」と併せて吸着された量を設定することができる。この場合、制御部6は、QCMの振動数のデータを受け付け、カチオン用ノズル11またはアニオン用ノズル13が経路を1回辿る毎にQCMの振動数が設定した吸着量に対応した振動数の変動値以上に変動したか否かを判定し、振動数の変動値が所定値以上になるまで再度経路を辿りながら噴霧を行わせ、所定値以上に達した場合に噴霧を停止させる。
【0069】
その他、コマンド「T」を受け付けることにより噴霧部1が動作を停止する。この場合、停止する時間のデータを併せて受け付ける。
【0070】
制御部6は、コマンド「C」「A」「R」「B」「T」のうち複数を組合せて予め設定したコマンド「X」を受け付けることができる。例えば「C,R,B,A,R,B,C,T20,B」という9つのコマンドをコマンド「X」として予め設定した場合、コマンド「X」を受け付けることにより、これら9つのコマンドに従った動作が行われるので、コマンドを入力する手順を簡略化することができる。また、これらのコマンドは、受け付けられた順にしたがって、表示部66に表示されるので、ユーザは各溶液の噴霧手順を容易に確認することができる。
【0071】
複数のコマンドを組み合わせた設定には、他にサイクルがある。サイクルを設定することにより、サイクルを開始するコマンド「s」及びサイクルを終了するコマンド「e」の間のコマンドを繰り返す。
【0072】
制御部6は例えば、5つのコマンドについてのサイクルを行うべく「s,C,R,A,R,B,e」を受け付け、併せて吸着量として「3000」を受け付けた場合、コマンド「C,R,A,R,B」に応じた処理を吸着量が3000nmに達するまで繰り返し行う。このサイクルのコマンドを受け付けることにより、例えば複数のアニオン層及びカチオン層が交互に積層された3000nmの交互吸着膜が自動的に作成される。
【0073】
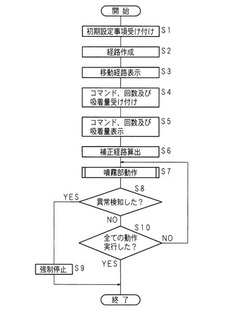
このサイクルのコマンド「s,C,R,A,R,B,e」を受け付けた場合の噴霧装置の動作を制御する制御部6の処理について説明する。図11は、制御部6の処理手順を示すフローチャートである。
【0074】
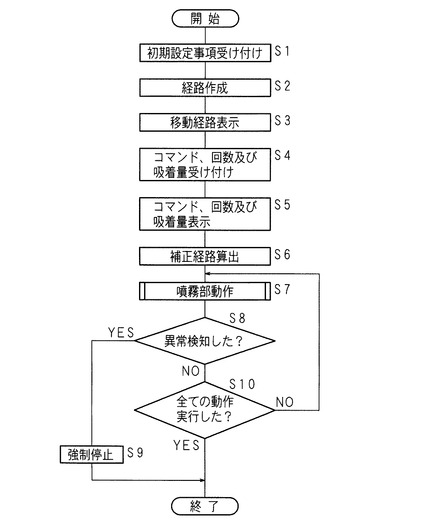
まず、制御部6は初期設定事項を示すデータを入力部65を介して受け付ける(ステップS1)。次いで、制御部6は、初期設定事項のうち、主走査方向、主走査方向の走査距離及び走査間隔等に基づいて噴霧部1の経路を作成する(ステップS2)。そして、制御部6は、作成した移動経路を、空吹き点及び走査開始点、並びに、対象物31の形状とともに表示部66に表示する(ステップS3:図7参照)。この際、対象物31の形状の領域内に空吹き点が設定されている場合には、不適切であるため、異常を知らせる旨を表示部66に表示して、ユーザに警告を発する。
【0075】
また、制御部6は、コマンドを受け付けるとともに、経路を移動する回数及び吸着量のデータを受け付ける(ステップS4)。そして、制御部6は、受け付けたコマンド、コマンドの実行回数及び吸着量のデータを表示部66に表示する(ステップS5:図10参照)。例えば、コマンドを「s,C,R,A,R,B,e」とし、カチオン溶液を噴霧する移動回数を3回、リンス溶液を噴霧する移動回数を2回、アニオン溶液を噴霧する移動回数を3回、ブロー処理を行う移動回数を1回とし、吸着量を3000nmとする。
【0076】
制御部6は、コマンドに対応するノズルに関わる間隔情報に基づいてノズル配置部14が移動する経路を補正した経路を算出する(ステップS6)。間隔情報は、例えばコマンドが「C」の場合はカチオン用ノズル11に関わる情報であり、カチオン用ノズル11とリンス用ノズル12との距離またはカチオン用ノズル11とアニオン用ノズル13との距離か、カチオン用ノズル11とノズル配置部14における所定の位置との距離かのいずれかである。補正した経路を算出した後、制御部6は噴霧部1を動作させる(ステップS7)。即ちコマンドに対応するノズルから対応する溶液を噴霧させながら、補正した経路に沿ってノズル配置部14(噴霧するノズル)を移動させる。
【0077】
噴霧部1の動作中、制御部6は、装置の扉が開いている、温度または圧力が異常な値を示している、噴霧部1の動作を停止させるための強制停止信号を受け付けた等の異常を検知したか否かを判断する(ステップS8)。異常を検知した場合(ステップS8でYES)、制御部6は、噴霧部1の動作を強制停止させて(ステップS9)、処理を終了する。
【0078】
一方、異常を検知しない場合に(ステップS8でNO)、制御部6は、コマンドに従って全ての動作を実行したか否かを判断する(ステップS10)。実行されていない場合(ステップS10でNO)、制御部6は、処理をステップS7に戻す。実行された場合(ステップS10でYES)、制御部6は、処理を終了する。
【0079】
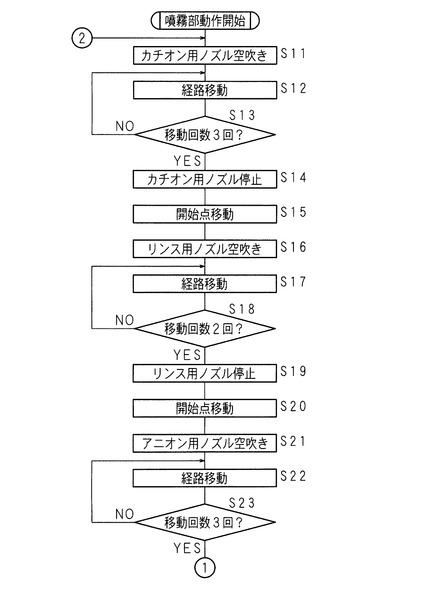
次に、制御部6が、ステップS5で受け付けたコマンド、移動回数及び吸着量のデータに従って噴霧部1を動作させる処理手順であるステップS7について詳述する。図12、図13は、制御部6が噴霧部1を動作させる処理の手順を示すフローチャートである。
【0080】
制御部6は、コマンド「C」に従い噴霧部1を動作させて、所定時間だけカチオン用ノズル11に空吹きを行わせる(ステップS11)。所定時間が経過した後、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってカチオン用ノズル11にカチオン溶液を噴霧させながら、カチオン用ノズル11の位置に基づいて補正された経路を移動させる(ステップS12)。
【0081】
制御部6は、設定されている3回分の経路の移動が終了したか否かを判断し(ステップS13)、終了していない場合(ステップS13でNO)、処理をステップS12に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS13でYES)、制御部6は、カチオン用ノズル11によるカチオン溶液の噴霧を停止させる(ステップS14)。
【0082】
停止後、制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させる(ステップS15)。制御部6は、所定時間だけリンス用ノズル12に空吹きを行わせる(ステップS16)。空吹きが終了すると、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってリンス用ノズル12に純水を噴霧させながら、リンス用ノズル12の位置に基づいて補正された経路を移動させる(ステップS17)。
【0083】
制御部6は、設定されている2回分の経路の移動が終了したか否かを判断し(ステップS18)、終了していない場合(ステップS18でNO)、処理をステップS17に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS18でYES)、制御部6は、リンス用ノズル12によるリンス溶液の噴霧を停止させる(ステップS19)。
【0084】
停止後、制御部6は、移動開始点の位置にアニオン用ノズル13が配置されるように、ノズル配置部14を移動させる(ステップS20)。制御部6は、所定時間だけアニオン用ノズル13に空吹きを行わせる(ステップS21)。所定時間が経過した後、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってアニオン用ノズル13にアニオン溶液を噴霧させながら、アニオン用ノズル13の位置に基づいて補正された経路を移動させる(ステップS22)。
【0085】
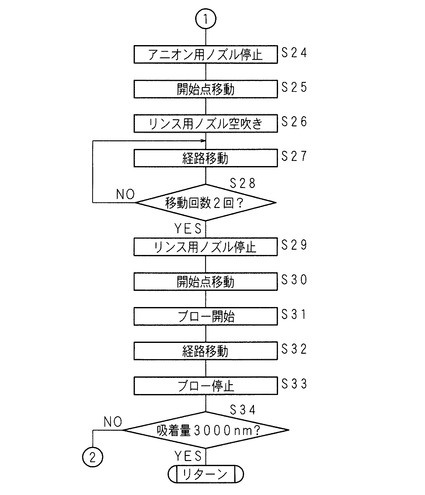
制御部6は、設定されている3回分の経路の移動が終了したか否かを判断し(ステップS23)、終了していない場合(ステップS23でNO)、処理をステップS22に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS23でYES)、制御部6は、アニオン用ノズル13によるアニオン溶液の噴霧を停止させる(ステップS24)。
【0086】
停止後、制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させる(ステップS25)。その後、制御部6は、リンス溶液の噴霧について、前述したステップS16〜ステップS19と同様の処理を行う(ステップS26〜ステップS29)。
【0087】
制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させた後(ステップS30)、リンス用ノズル12からエアーを噴出させるブローを開始する(ステップS31)。受け付けたデータに基づく所定の圧力及び移動速度に従ってエアーを噴出させながら、リンス用ノズル12の位置に基づいて補正された経路を移動させる(ステップS32)。エアーを噴出させながらの1回分の移動が終了すると、制御部6は、噴霧用コンプレッサ21を停止してブロー処理を停止させる(ステップS33)。
【0088】
制御部6は、膜厚計33で計測された吸着量が3000nmに達したか否かを判断し(ステップS34)、達している場合は(ステップS34でYES)、処理を終了する。一方、達していない場合には(ステップS34でNO)、制御部6は、処理をステップS11に戻す。
【0089】
以上のような処理により、交互吸着膜を成膜させる。本実施の形態の噴霧装置によれば、厚さが均一な交互吸着膜を成膜するための制御を適切に行うことができる。
【0090】
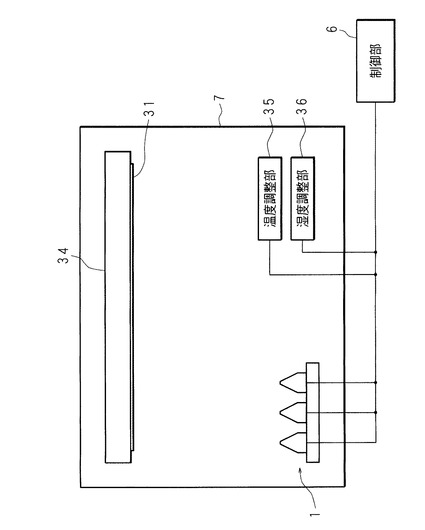
図14は、噴霧装置の他の実施形態を示す模式図である。図14に示す噴霧装置では、噴霧部1及び対象物31をチャンバ7の内部に設けている。この例で溶液の飛散を防止することができる。この例の噴霧装置では、チャンバ7内の温度を調整する温度調整部35と、チャンバ7内の湿度を調整する湿度調整部36とを備えて、制御部6によってチャンバ7内の温度及び湿度を調整するようにしている。
【0091】
また、温度調整部35を壁34の背面に配置して、壁34の温度を調整するようにしてもよい。対象物31の温度により、アニオン溶液及びカチオン溶液の吸着量、吸着速度等が異なる場合があるので、温度調整部35により温度を調整することにより、これらを調整することができる。
【0092】
なお、噴霧部1に備えられるノズルは3つに限らず4つ以上であってもよい。この場合4つ目のノズルとしては、膜を硬化する物質を噴霧する硬化用ノズル、または、対象物31に表面電荷を与えるための表面電荷溶液用ノズルを使用することが可能である。また、溶液噴霧用に3本のノズルを設け、洗浄用に1本のノズルを設けるような構成も可能である。
【0093】
また、移動する経路として、前述したようにカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が同一の経路を辿ってもよいし、異なる経路を辿ってもよい。例えば、カチオン用ノズル11及びアニオン用ノズル13は主走査方向を水平方向とする同一の経路を辿り、リンス用ノズル12は主走査方向を鉛直方向とする経路を辿るようにしてもよい。
【0094】
また、対象物31を洗浄する洗浄手段として、リンス溶液または気体を噴霧するノズル(リンス用ノズル12)を用いる場合について説明したが、洗浄手段は、ノズルに限らず、振動、音波、光、超音波などを利用して対象物31を洗浄するようなものでも良い。
【0095】
また、膜厚計33は、QCMを用いる場合について説明したが、レーザ膜厚計、エリプソメータまたは光学測定器等を用いてもよい。
【0096】
また、上述した実施の形態では、噴霧装置が動作するために必要な種々の制御用のコンピュータプログラムをプログラム記憶部62に予め格納しておく場合について説明したが、これとは異なり、DVD、CD−ROM、フレキシブルディスク等の可搬型記録媒体から、このような制御用のコンピュータプログラムを制御部6に読み出して使用するようにしてもよい。
【0097】
今回開示された実施の形態はすべての点で例示であって、制限的なものでは無いと考えられるべきである。本発明の範囲は、前述した意味では無く、特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0098】
1 噴霧部
6 制御部
11 カチオン用ノズル(第2ノズル)
12 リンス用ノズル(第3ノズル:洗浄手段)
13 アニオン用ノズル(第1ノズル)
14 ノズル配置部(配置部)
31 対象物
33 膜厚計
61 演算部
62 プログラム記憶部
63 実行記憶部
64 入力データ記憶部
65 入力部
66 表示部
【技術分野】
【0001】
本発明は、交互吸着膜の成膜等に利用され、移動しながら夫々が異なる溶液または微粒子を噴霧する複数のノズルと洗浄を行う洗浄手段とを有する噴霧装置の動作を制御するためのコンピュータプログラム、噴霧制御方法及び噴霧制御装置に関する。
【背景技術】
【0002】
複合有機薄膜を作成する方法として、交互吸着(Layer-by-Layer Self-Assembly)を利用した方法が知られている(非特許文献1)。この方法では、初期表面電荷を与えた基板を正の電解質ポリマーや微粒子などのカチオンの水溶液及び負の電解質ポリマーや微粒子などのアニオンの水溶液に交互に浸す。基板の表面にカチオンがクーロン力により吸着されてカチオン層が形成され、カチオン層にアニオンがクーロン力により吸着されてアニオン層を形成されるという過程を経て、カチオン層とアニオン層とが交互に積層され、基板上に多層構造を有する交互吸着膜が成膜される。
【0003】
広範囲の基板の表面上に交互吸着膜を成膜する方法としては、正の電解質ポリマーであるカチオン水溶液を噴霧するスプレーと、負の電解質ポリマーであるアニオン水溶液を噴霧するスプレーとを吹き付ける方法が提案されている(非特許文献1及び2)。
【0004】
また、スプレーノズルの移動処理をコンピュータによって制御し、撥水剤である液体を噴霧する方法が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4302321号公報
【非特許文献】
【0006】
【非特許文献1】Decher.G, Hong.J.D. and J.Schmit: Thin Solid Films, 210/211, p.831(1992)
【非特許文献2】Anindarupa Chunder, Kenneth Etcheverry, Samuel Wadsworth, Glenn D.Boreman, Lei Zhai: Fabrication of anti-reflection coatings on plastics using the spraying layer-by-layer self-assembly technique, Journal of the SID, 17/4, p.389-395, 2009
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、非特許文献1及び2に記載の方法では、アニオン溶液及びカチオン溶液を均一に塗布することが難しく、また、表面に凝集物が形成され易いという問題があった。一方、特許文献1には、撥水剤コーティング装置における撥水剤を噴霧するスプレーノズルの具体的な移動制御は記載されていない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであり、複数のノズルを用いて異なる種類の溶液または微粒子を精度良く噴霧することができ、また、精度良く洗浄を行うことができ、結果として厚さが均一な膜の生成を可能とするコンピュータプログラム、噴霧制御方法及び噴霧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るコンピュータプログラムは、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を、コンピュータに制御させるためのコンピュータプログラムであって、前記コンピュータに、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップとを実行させることを特徴とする。
【0010】
本発明に係る噴霧制御方法は、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する方法であって、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップとを含むことを特徴とする。
【0011】
本発明に係る噴霧制御装置は、配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する装置であって、前記第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付ける手段と、受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する手段と、作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御する手段とを備えることを特徴とする。
【0012】
本発明にあっては、第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付け、受け付けたデータに基づいて、第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する。そして、作成した移動すべき経路と、記憶している第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報とに基づいて、第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに洗浄手段が洗浄する際の配置部の移動を制御する。よって、移動しながら溶液または微粒子を噴霧する第1ノズル及び第2ノズル並びに洗浄を行う洗浄手段夫々を同一の経路にて簡単に移動させることができ、これらのノズル及び洗浄手段夫々の移動経路の制御を容易かつ精度良く行える。
【0013】
本発明に係るコンピュータプログラムは、前記コンピュータが表示部を有しており、前記コンピュータに、前記作成した移動すべき経路を前記表示部に表示するステップをさらに実行させることを特徴とする。
【0014】
本発明にあっては、第1ノズル、第2ノズル及び洗浄手段の作成した移動経路を表示部に表示する。よって、移動しながら溶液または微粒子を噴霧するこれらのノズル及び洗浄を行う洗浄手段の移動経路をユーザは容易に確認できる。
【0015】
本発明に係るコンピュータプログラムは、前記コンピュータに、受け付けた前記第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、前記第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、前記洗浄手段に移動経路に応じて洗浄させるための第3コマンドを、受け付けた順に前記表示部に表示するステップをさらに実行させることを特徴とする。
【0016】
本発明にあっては、第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、洗浄手段に移動経路に応じて洗浄させるための第3コマンドを受け付け、受け付けたこれらのコマンドを受け付けた順に表示部に表示する。よって、移動しながら溶液または微粒子を噴霧するこれらのノズルの噴霧動作及び洗浄を行う洗浄手段の洗浄動作の内容をユーザは容易に確認できる。
【0017】
本発明に係るコンピュータプログラムは、前記コンピュータに、受け付けた前記第1コマンドの実行回数、前記第2コマンドの実行回数、及び/または、前記第3コマンドの実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0018】
本発明にあっては、第1コマンド、第2コマンド、及び/または第3コマンド夫々の実行回数を受け付け、受け付けた実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて表示部に表示する。よって、ノズルの噴霧動作及び洗浄手段の洗浄動作の内容をユーザは容易に確認できる。
【0019】
本発明に係るコンピュータプログラムは、前記洗浄手段が、不要な物質を洗浄するリンス溶液または気体を前記対象物に噴霧する第3ノズルであり、前記コンピュータに、前記第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点を、前記作成した移動すべき経路に加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0020】
本発明にあっては、第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点も表示部に表示する。よって、移動しながら溶液、微粒子または気体を噴霧するこれらのノズルの空吹き位置をユーザは容易に確認できる。
【0021】
本発明に係るコンピュータプログラムは、前記コンピュータに、前記対象物の受け付けた形状を、前記作成した移動すべき経路及び空吹き点に加えて前記表示部に表示するステップをさらに実行させることを特徴とする。
【0022】
本発明にあっては、対象物の形状を、作成したノズルの移動経路及び空吹き点に加えて表示部に表示する。よって、対象物の形状と移動経路及び空吹き点との位置関係がユーザにとって明瞭となり、ノズル夫々の移動動作の制御を簡単かつ精度良く行える。
【0023】
本発明に係るコンピュータプログラムは、前記コンピュータに、前記空吹き点が前記対象物の形状の範囲内に存在する場合に、警告を発するステップをさらに実行させることを特徴とする。
【0024】
本発明にあっては、空吹き点が対象物の形状の範囲内に存在する場合に、警告を発してユーザに知らせる。よって、不適切な空吹きを防止して、ノズル夫々の噴霧動作を精度良く行える。
【0025】
本発明に係るコンピュータプログラムは、前記間隔情報が、前記第1ノズル、第2ノズル及び洗浄手段間の距離、または、前記配置部における所定の位置から前記第1ノズル、第2ノズル及び洗浄手段夫々までの距離であることを特徴とする。
【0026】
本発明にあっては、間隔情報として、第1ノズル、第2ノズル及び洗浄手段間の距離、または、配置部における所定の位置から第1ノズル、第2ノズル及び洗浄手段夫々までの距離を用いる。よって、オフセット補正に必要である正確な間隔情報が得られる。
【発明の効果】
【0027】
本発明では、受け付けた初期設定事項のデータに基づいて、第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成し、作成した移動すべき経路と、記憶している第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報(オフセット量)とに基づいて、第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに洗浄手段が洗浄する際の配置部の移動を制御するようにしたので、移動しながら溶液または微粒子を噴霧する第1ノズル及び第2ノズル並びに洗浄を行う洗浄手段夫々を同一の経路にて簡単に移動させることができ、これらのノズル及び洗浄手段夫々の移動経路の制御を容易かつ精度良く行うことができる。そして、結果として、異なる材料からなる複数の層を積層させた交互吸着膜を、厚さが均一に短時間で生成することが可能である。
【図面の簡単な説明】
【0028】
【図1】噴霧装置の前面側を示す斜視図である。
【図2】噴霧装置の後面側を示す斜視図である。
【図3】リンス用ノズル(第3ノズル)についての制御系を示した模式図である。
【図4】制御部の構成を示すブロック図である。
【図5】噴霧部の他の構成例を示す斜視図である。
【図6】噴霧部と噴霧される対象物との位置関係を示す模式図である。
【図7】経路を作成する表示画面の例示図である。
【図8】噴霧するノズルが移動する経路を示す表示画面の例示図である。
【図9】動作コマンドの例を示す図表である。
【図10】動作プログラムの表示画面の例示図である。
【図11】制御部の処理手順を示すフローチャートである。
【図12】制御部が噴霧部を動作させる処理(図11のステップS7)の手順を示すフローチャートである。
【図13】制御部が噴霧部を動作させる処理(図11のステップS7)の手順を示すフローチャートである。
【図14】噴霧装置の他の実施形態を示す模式図である。
【発明を実施するための形態】
【0029】
以下、本発明に係るコンピュータプログラム、噴霧制御方法及び噴霧制御装置について説明する。図1及び図2は、噴霧装置の前面側及び後面側を示す斜視図である。噴霧装置は複数種の溶液、微粒子または気体を噴霧口から噴霧する噴霧部1を備える。
【0030】
溶液の噴霧を行う噴霧部1は、カチオン溶液または微粒子を噴霧するカチオン用ノズル(第2ノズル)11、リンス溶液または気体を噴霧するリンス用ノズル(洗浄手段としての第3ノズル)12、及びアニオン溶液または微粒子を噴霧するアニオン用ノズル13(第1ノズル)を備える。カチオン溶液に用いられるカチオンとしては、正の電荷を有するイオン性ポリマーまたは正の電荷を有する微粒子等が挙げられ、アニオン溶液に用いられるアニオンとしては、負の電荷を有するイオン性ポリマーまたは負の電荷を有する微粒子等が挙げられる。
【0031】
リンス溶液には純水が用いられるが、イオン交換水、アルコール、またはアルコール及び水の混合液等であってもよい。リンス溶液を噴霧することにより、基板に静電的に吸着している量を超える量の電荷を有する物質、その他成膜に不要な物質を洗い流すので、一つの層における部分ごとの膜の厚さを均一にすることができる。また、アニオンとカチオンとが混合されることにより、物質が沈殿することがあるため、リンス溶液によって電荷を有する物質を洗い流す。
【0032】
適切なリンス時間は、用途、またはアニオン溶液、カチオン溶液の性質等に応じて異なるが、数秒以上から数十秒以下の程度であることが好ましく、リンス用ノズル12は連続して同じ経路を複数回噴霧しても良い。
【0033】
噴霧部1では、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の3つのノズルが同一の水平方向を向くように、ノズル配置部14に配置されている。ノズル配置部14は、カチオン用ノズル11とリンス用ノズル12との間隔、リンス用ノズル12とアニオン用ノズル13との間隔、及びアニオン用ノズル13とカチオン用ノズル11との間隔夫々が常に一定になるように各ノズルを配置する。ノズル配置部14が、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13を備えているので、異なる溶液を噴霧する度にノズルを取り換える必要は無く、迅速に噴霧を行うことができる。
【0034】
ノズル配置部14は、噴霧する方向と反対側に設けられた鉛直摺動部2に固定されている。鉛直摺動部2は、鉛直方向を長手方向とする四角柱状の移動柱3を幅方向に挟むようにコの字型の形状をなし、移動柱3と接触している。また、鉛直摺動部2は、接続された制御部6(図3参照)から送信される指示信号に基づいて移動柱3の長手方向に移動することができる。
【0035】
移動柱3の長手方向の上端部には水平摺動部4が固定されている。水平摺動部4は、水平方向を長手方向とする四角柱状の固定柱5を幅方向に挟むようにコの字型の形状をなし、固定柱5と接触している。また、水平摺動部4は、接続された制御部6(図3参照)から送信される指示信号に基づいて固定柱5の長手方向に移動することができる。
【0036】
こうした構成により、噴霧部1は鉛直方向及び水平方向に移動して広い範囲で噴霧を行うことができる。
【0037】
図3は、リンス用ノズル12についての制御系を示した模式図である。なお、カチオン用ノズル11及びアニオン用ノズル13についての制御系は、後述する振動子30を除いてリンス用ノズル12についての制御系と同様の構成であるので、それらの図示は省略する。
【0038】
カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の夫々のノズルには、噴霧する際の高圧な空気を供給するための噴霧用コンプレッサ21が、送気管28aを介して接続されており、また、溶液を夫々のノズルへ吸引するピストンを作動させるために高圧な空気を供給するトリガー用コンプレッサ22が、送気管28bを介して接続されており、さらに、溶液を供給するための溶液タンク23が、送液管28cを介して接続されている。
【0039】
噴霧用コンプレッサ21、トリガー用コンプレッサ22及び溶液タンク23の夫々は、他の溶液が混入しないように、アニオン用、カチオン用及びリンス用に分離されている。また、噴霧パターン調整用の管が設けられ、従って、噴霧部1では、夫々のノズルに4本の管が接続されており、全体として合計12本の管が設けられている。なお、噴霧用コンプレッサ21及びトリガー用コンプレッサ22は共用可能である。
【0040】
噴霧用コンプレッサ21と接続されている送気管28aの中途には、送気管28aを通る空気の圧力を調整する空気圧調整部24と、送気の作動及び停止を制御する2方電磁弁25とが、噴霧用コンプレッサ21側からこの順に設けられている。トリガー用コンプレッサ22と接続されている送気管28bの中途には、送気の作動、停止及び残圧を逃がすための排気を行う3方電磁弁26が設けられている。また、溶液タンク23と接続されている送液管28cの中途には、送液管28cを通る溶液の量を調整する液量調整部27が設けられている。
【0041】
制御部6は、空気圧調整部24、2方電磁弁25、3方電磁弁26及び液量調整部27を制御する。なお、噴霧の動作及び停止を円滑に行うべく、液量調整部27及び3方電磁弁26とは作動と停止とを同時に行うように構成してもよい。
【0042】
加えてリンス用ノズル12については、制御部6が2方電磁弁25を開けさせ、液量調整部27をリンス溶液が流れないように制御し、2方電磁弁25を開放して噴霧用コンプレッサ21から送気された空気をリンス用ノズル12から噴出させることにより、噴霧された溶液を乾燥させるための空気を噴出することができる。ブローの有無により得られる膜の特性及び膜厚が異なる場合があるため、膜の種類によっては乾燥が必要な場合がある。また、交互吸着膜の一部が乾燥していないことにより、不均一な部分が発生する場合が生じ得る。従って所望の成膜の性質によりブローを行う必要が生じる。
【0043】
送液管28cの中途の液量調整部27より下流側には、送液管28cを流れる溶液の温度を調整するヒータを備えた温度調整部29が設けられている。アニオンまたはカチオンに用いられる物質によっては、常温より高い温度で吸着させることにより膜厚が異なる場合があり、また、吸着の速度が異なる場合もある。従って温度を調整することにより所望の交互吸着膜を成膜することができる。また、リンス溶液についても温度を調整することで洗浄力を高めることができる。なお、温度調整部29は溶液タンク23に設けてもよく、各ノズルの内部に設けてもよい。
【0044】
さらに、リンス用ノズル12の送液管28cの中途の温度調整部29より下流側には、リンス溶液を振動させる振動子30が設けられている。振動子30によってリンス溶液を振動させることによってリンス溶液に気泡が生じる。これによりリンス溶液の洗浄効果を向上させることができる。また、リンス用ノズル12による噴霧圧、噴霧量を測定し、それらの測定値が所定値になるように、制御部6によってフィードバック制御をかけることができる。
【0045】
図4は、制御部6の構成を示すブロック図である。制御部6は、パーソナルコンピュータを用いて構成されており、本発明の噴霧制御装置をなす。制御部6は、演算部61と、プログラム記憶部62と、実行記憶部63と、入力データ記憶部64と、入力部65と、表示部66とを有している。
【0046】
演算部61は、CPU(Central Processing Unit)またはMPU(Micro Processing Unit)等である。プログラム記憶部62は、書き込み及び消去可能なEPROM(Erasable Programmable ROM)またはフラッシュメモリ等であり、噴霧装置が動作するために必要な種々の制御用のコンピュータプログラムを予め格納してある。演算部61は、プログラム記憶部62に記憶されている制御用のコンピュータプログラムを読み出して実行する。これにより、演算部61は、各ノズルからの溶液の噴霧を制御するためのソフトウェア的な各処理を実行する。また、演算部61は、相互に接続されたプログラム記憶部62、実行記憶部63、入力データ記憶部64、入力部65及び表示部66の動作を制御する。
【0047】
実行記憶部63は、SRAMまたはフラッシュメモリ等であり、プログラム記憶部62から読み出される制御用のコンピュータプログラムなど、制御部6(演算部61)による制御用のコンピュータプログラムの実行時に発生する種々のデータを一時的に記憶する。また、実行記憶部63は、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13間の間隔に関する間隔情報を記憶している。
【0048】
入力部65は、キーボード、タッチパネル等からなり、各種のデータ(後述する初期設定事項、コマンドなど)の入力をユーザから受け付ける。入力部65を介してデータが入力された場合、制御部6は、入力されたデータをRAMまたはフラッシュメモリ等で構成される入力データ記憶部64に記憶する。表示部66は、入力されたデータ、噴霧装置が動作する際の状態などを表示する。
【0049】
なお、噴霧部1の構成は上述した例(図1参照)に限られない。図5は、噴霧部1の他の構成例を示す斜視図である。図5Aに示す構成例では、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が、図1に示す例のように水平方向ではなく、四角柱状のノズル配置部14に夫々等間隔で鉛直方向に配置されている。また、図5Bに示す構成例では、各ノズルの中心が同一円周上に位置するように、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が、ノズル配置部14に夫々等間隔で配置されている。
【0050】
図6は、噴霧部1と噴霧される対象物31との位置関係を示す模式図である。噴霧部1の移動によって、板状の対象物31に各種の溶液の噴霧が行われる。例えば基板からなる板状の対象物31は鉛直方向に立設して留め具32により壁34に配置されている。対象物31に対して噴霧が一様に行われるように、ノズルにおける図示しない噴霧孔の大きさ、間隔及び形状等を考慮し、噴霧部1が移動することができる面状の範囲と所定の間隔を置いて対象物31は配置される。また、対象物31(基板)には加熱用のヒータが設けられている。対象物31を移動する機構を設けて、対象物31がカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13に対して相対移動可能に構成することができる。
【0051】
また、対象物31の近傍には、成膜された交互吸着膜の厚さを測定する膜厚計33が、壁に固定して設けられている。膜厚計33として、例えばQCM(Quartz Crystal Microbalance)を用いる。QCMは、水晶振動子の電極表面に物質が付着し、質量が変化することにより、振動数が変化することを利用して質量変化を測定する測定装置である。下記(1)式に示されるように、振動数の変化から算出される質量変化Δmに基づいて振動数変化Δfを算出することができる。本実施の形態では、表面積を調整することにより振動数1Hzの変化が膜厚1nmに相当するように設定する。なお、QCMを用いる場合に限らず、赤外線、X線を利用した膜厚計33を用いるようにしても良い。
【0052】
【数1】
【0053】
制御部6は、溶液を噴霧する際に、ノズル配置部14(噴霧する各ノズル)を移動させる移動経路をプログラムによって制御する。図7は、噴霧するノズルが移動する経路を示す表示画面の例示図である。このような表示画面は、表示部66(図4参照)に表示される。図中の太線は、長方形状の対象物31(破線にて図示)に対して噴霧部1の経路を水平方向に投影した線を表している。この線は噴霧口の位置と対応している。図7においてて、(1)は空吹き点(移動開始点)、(2)は膜厚計33(水晶振動子)の設置位置、(3)は走査開始点を夫々示している。
【0054】
まず、制御部6は、入力部65(図4参照)により入力された初期設定事項を示すデータを受け付ける。初期設定事項は水平摺動部4及び鉛直摺動部2の移動速度、対象物31の大きさや形状、その他後述する主走査方向、主走査方向の走査距離(ストローク)、走査間隔(ピッチ)等についてのデータである。
【0055】
制御部6は初期設定事項のうち、主走査方向、主走査方向の走査距離及び走査間隔に基づいて、噴霧部1の噴霧するノズルが移動する経路を作成する。図8は、噴霧するノズルが移動する経路を示す表示画面の例示図である。図8に示すように、制御部6は表示画面に対象物31(破線)及び噴霧するノズルが移動する経路(太実線)を表示させる。
【0056】
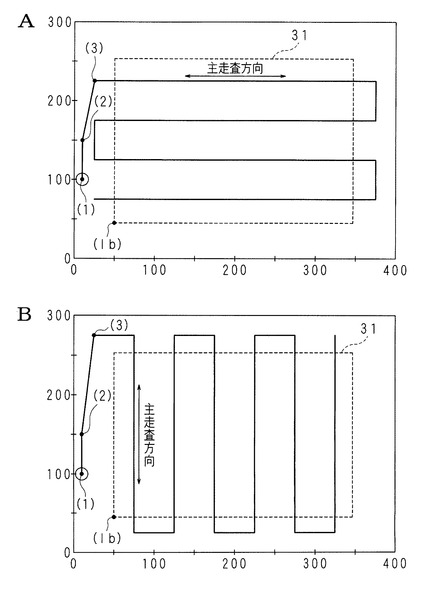
制御部6は、対象物31を噴霧するノズルを、主走査方向に走査距離だけ往復し、主走査方向の折り返し点で主走査方向と垂直な一つの方向にさらに走査間隔だけ走査させる。このように移動させることにより、対象物31の全体を噴霧する。なお、噴霧するノズルの経路は、例えば図8Aのように水平方向を主走査方向としてもよく、図8Bのように鉛直方向を主走査方向としてもよい。
【0057】
噴霧するノズルの経路は、対象物31の全ての部分で膜厚を均一にすべく、1回の経路移動中に噴霧されない範囲及び重複して噴霧される範囲が無いように定めることが望ましい。また、移動する方向の転換には時間を要するので、折り返す地点の付近では噴霧される溶液の量が多くなるため、主走査方向の移動は対象物31の主走査方向の幅よりも長い距離を移動し、折り返す地点の付近では対象物31に噴霧を行わないようにすることが望ましい。
【0058】
これらを考慮して、対象物31の大きさや形状のデータを受け付けた場合には制御部6が主走査方向の長さ、主走査方向間の距離等について演算処理を行い、経路を算出するようにしてもよい。
【0059】
アニオン層及びカチオン層の厚さはどの層も一定ではなく、層の数と膜厚とは非線形の関係にある。従って交互吸着膜を所望の厚さにしたい場合に、層の数から厚さを推定することは困難である。そこで膜厚計33で膜の厚さを測定しながら層を重ねることにより、所望の膜厚に成膜することができる。
【0060】
初期設定事項のデータを受け付けた後、噴霧するノズルが移動する経路を作成する。併せて噴霧するノズルの移動速度、移動開始点の噴霧するノズルの位置、対象物31に噴霧する前に移動開始点の位置で行われる空吹き時間等についてのデータを受け付けることにより、移動する経路を作成することができる。
【0061】
また、受け付けたデータに基づく移動開始点の噴霧部1の位置を、実行記憶部63に予め記憶されているノズル間の間隔に関する間隔情報(カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13のオフセット分)を補正して算出する。
【0062】
噴霧部1には、前述したように、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が並置されている。従って噴霧部1の位置を一定にして噴霧を行った場合、ノズルの位置の分だけオフセットが生じ、異なる位置を噴霧することになる。そこで、制御部6は、予めノズル間の間隔に関する間隔情報を実行記憶部63に記憶しておき、間隔情報により経路をオフセット量だけ補正し、カチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13の夫々が設定された経路を移動しながら溶液を噴霧する場合には、全く同一の経路を辿るようにする。
【0063】
間隔情報は、カチオン用ノズル11及びリンス用ノズル12間の距離、リンス用ノズル12及びアニオン用ノズル13間の距離、アニオン用ノズル13及びカチオン用ノズル11間の距離でもよく、ノズル配置部14の所定の位置からカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13夫々までの距離でもよい。
【0064】
経路作成後に、制御部6は動作コマンドを入力部65から受け付ける。図9は、動作コマンドの例を示す図表であり、図10は、動作プログラムの表示画面の例示図である。このような動作プログラムの表示画面は、表示部66に表示される。コマンド「C」を受け付けることにより、カチオン溶液が噴霧される。より具体的には、コマンド「C」を受け付けた場合、制御部6は、受け付けたデータに基づく移動開始点の噴霧部1の位置から、カチオン用ノズル11のオフセットによって補正することにより算出した、補正後の移動開始点の位置にカチオン用ノズル11を配置させる。
【0065】
制御部6は、トリガー用コンプレッサ22と溶液タンク23とを作動させ、受け付けたデータに基づく所定時間だけカチオン用ノズル11に空吹きを行わせる。空吹きが終了した後、受け付けたデータに基づく噴霧圧及び移動速度に従って、カチオン用ノズル11にてカチオン溶液を継続して噴霧させながら経路を移動させる。経路の移動が終了した場合、カチオン用ノズル11は噴霧を終了する。
【0066】
また、制御部6は、コマンド「C」と併せて経路を通る回数の情報も受け付けることができる。例えば移動回数(スキャン回数)が3回であった場合、制御部6は、経路の開始点から終了点までの移動が3回に達するまで噴霧部1を移動させながら噴霧を継続させる。また、経路を同じ方向に辿るか往復するかを設定することもできる。
【0067】
同様にコマンド「A」を受け付けることによりアニオン溶液が噴霧され、コマンド「R」を受け付けることによりリンス溶液が噴霧されるように設定する。また、コマンド「B」を受け付けることによりブローが行われるように設定する。
【0068】
制御部6は、コマンド「C」及び「A」と併せて吸着された量を設定することができる。この場合、制御部6は、QCMの振動数のデータを受け付け、カチオン用ノズル11またはアニオン用ノズル13が経路を1回辿る毎にQCMの振動数が設定した吸着量に対応した振動数の変動値以上に変動したか否かを判定し、振動数の変動値が所定値以上になるまで再度経路を辿りながら噴霧を行わせ、所定値以上に達した場合に噴霧を停止させる。
【0069】
その他、コマンド「T」を受け付けることにより噴霧部1が動作を停止する。この場合、停止する時間のデータを併せて受け付ける。
【0070】
制御部6は、コマンド「C」「A」「R」「B」「T」のうち複数を組合せて予め設定したコマンド「X」を受け付けることができる。例えば「C,R,B,A,R,B,C,T20,B」という9つのコマンドをコマンド「X」として予め設定した場合、コマンド「X」を受け付けることにより、これら9つのコマンドに従った動作が行われるので、コマンドを入力する手順を簡略化することができる。また、これらのコマンドは、受け付けられた順にしたがって、表示部66に表示されるので、ユーザは各溶液の噴霧手順を容易に確認することができる。
【0071】
複数のコマンドを組み合わせた設定には、他にサイクルがある。サイクルを設定することにより、サイクルを開始するコマンド「s」及びサイクルを終了するコマンド「e」の間のコマンドを繰り返す。
【0072】
制御部6は例えば、5つのコマンドについてのサイクルを行うべく「s,C,R,A,R,B,e」を受け付け、併せて吸着量として「3000」を受け付けた場合、コマンド「C,R,A,R,B」に応じた処理を吸着量が3000nmに達するまで繰り返し行う。このサイクルのコマンドを受け付けることにより、例えば複数のアニオン層及びカチオン層が交互に積層された3000nmの交互吸着膜が自動的に作成される。
【0073】
このサイクルのコマンド「s,C,R,A,R,B,e」を受け付けた場合の噴霧装置の動作を制御する制御部6の処理について説明する。図11は、制御部6の処理手順を示すフローチャートである。
【0074】
まず、制御部6は初期設定事項を示すデータを入力部65を介して受け付ける(ステップS1)。次いで、制御部6は、初期設定事項のうち、主走査方向、主走査方向の走査距離及び走査間隔等に基づいて噴霧部1の経路を作成する(ステップS2)。そして、制御部6は、作成した移動経路を、空吹き点及び走査開始点、並びに、対象物31の形状とともに表示部66に表示する(ステップS3:図7参照)。この際、対象物31の形状の領域内に空吹き点が設定されている場合には、不適切であるため、異常を知らせる旨を表示部66に表示して、ユーザに警告を発する。
【0075】
また、制御部6は、コマンドを受け付けるとともに、経路を移動する回数及び吸着量のデータを受け付ける(ステップS4)。そして、制御部6は、受け付けたコマンド、コマンドの実行回数及び吸着量のデータを表示部66に表示する(ステップS5:図10参照)。例えば、コマンドを「s,C,R,A,R,B,e」とし、カチオン溶液を噴霧する移動回数を3回、リンス溶液を噴霧する移動回数を2回、アニオン溶液を噴霧する移動回数を3回、ブロー処理を行う移動回数を1回とし、吸着量を3000nmとする。
【0076】
制御部6は、コマンドに対応するノズルに関わる間隔情報に基づいてノズル配置部14が移動する経路を補正した経路を算出する(ステップS6)。間隔情報は、例えばコマンドが「C」の場合はカチオン用ノズル11に関わる情報であり、カチオン用ノズル11とリンス用ノズル12との距離またはカチオン用ノズル11とアニオン用ノズル13との距離か、カチオン用ノズル11とノズル配置部14における所定の位置との距離かのいずれかである。補正した経路を算出した後、制御部6は噴霧部1を動作させる(ステップS7)。即ちコマンドに対応するノズルから対応する溶液を噴霧させながら、補正した経路に沿ってノズル配置部14(噴霧するノズル)を移動させる。
【0077】
噴霧部1の動作中、制御部6は、装置の扉が開いている、温度または圧力が異常な値を示している、噴霧部1の動作を停止させるための強制停止信号を受け付けた等の異常を検知したか否かを判断する(ステップS8)。異常を検知した場合(ステップS8でYES)、制御部6は、噴霧部1の動作を強制停止させて(ステップS9)、処理を終了する。
【0078】
一方、異常を検知しない場合に(ステップS8でNO)、制御部6は、コマンドに従って全ての動作を実行したか否かを判断する(ステップS10)。実行されていない場合(ステップS10でNO)、制御部6は、処理をステップS7に戻す。実行された場合(ステップS10でYES)、制御部6は、処理を終了する。
【0079】
次に、制御部6が、ステップS5で受け付けたコマンド、移動回数及び吸着量のデータに従って噴霧部1を動作させる処理手順であるステップS7について詳述する。図12、図13は、制御部6が噴霧部1を動作させる処理の手順を示すフローチャートである。
【0080】
制御部6は、コマンド「C」に従い噴霧部1を動作させて、所定時間だけカチオン用ノズル11に空吹きを行わせる(ステップS11)。所定時間が経過した後、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってカチオン用ノズル11にカチオン溶液を噴霧させながら、カチオン用ノズル11の位置に基づいて補正された経路を移動させる(ステップS12)。
【0081】
制御部6は、設定されている3回分の経路の移動が終了したか否かを判断し(ステップS13)、終了していない場合(ステップS13でNO)、処理をステップS12に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS13でYES)、制御部6は、カチオン用ノズル11によるカチオン溶液の噴霧を停止させる(ステップS14)。
【0082】
停止後、制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させる(ステップS15)。制御部6は、所定時間だけリンス用ノズル12に空吹きを行わせる(ステップS16)。空吹きが終了すると、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってリンス用ノズル12に純水を噴霧させながら、リンス用ノズル12の位置に基づいて補正された経路を移動させる(ステップS17)。
【0083】
制御部6は、設定されている2回分の経路の移動が終了したか否かを判断し(ステップS18)、終了していない場合(ステップS18でNO)、処理をステップS17に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS18でYES)、制御部6は、リンス用ノズル12によるリンス溶液の噴霧を停止させる(ステップS19)。
【0084】
停止後、制御部6は、移動開始点の位置にアニオン用ノズル13が配置されるように、ノズル配置部14を移動させる(ステップS20)。制御部6は、所定時間だけアニオン用ノズル13に空吹きを行わせる(ステップS21)。所定時間が経過した後、受け付けたデータに基づく所定の噴霧圧及び移動速度に従ってアニオン用ノズル13にアニオン溶液を噴霧させながら、アニオン用ノズル13の位置に基づいて補正された経路を移動させる(ステップS22)。
【0085】
制御部6は、設定されている3回分の経路の移動が終了したか否かを判断し(ステップS23)、終了していない場合(ステップS23でNO)、処理をステップS22に戻して次の分の移動を継続させる。一方、終了した場合には(ステップS23でYES)、制御部6は、アニオン用ノズル13によるアニオン溶液の噴霧を停止させる(ステップS24)。
【0086】
停止後、制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させる(ステップS25)。その後、制御部6は、リンス溶液の噴霧について、前述したステップS16〜ステップS19と同様の処理を行う(ステップS26〜ステップS29)。
【0087】
制御部6は、移動開始点の位置にリンス用ノズル12が配置されるように、ノズル配置部14を移動させた後(ステップS30)、リンス用ノズル12からエアーを噴出させるブローを開始する(ステップS31)。受け付けたデータに基づく所定の圧力及び移動速度に従ってエアーを噴出させながら、リンス用ノズル12の位置に基づいて補正された経路を移動させる(ステップS32)。エアーを噴出させながらの1回分の移動が終了すると、制御部6は、噴霧用コンプレッサ21を停止してブロー処理を停止させる(ステップS33)。
【0088】
制御部6は、膜厚計33で計測された吸着量が3000nmに達したか否かを判断し(ステップS34)、達している場合は(ステップS34でYES)、処理を終了する。一方、達していない場合には(ステップS34でNO)、制御部6は、処理をステップS11に戻す。
【0089】
以上のような処理により、交互吸着膜を成膜させる。本実施の形態の噴霧装置によれば、厚さが均一な交互吸着膜を成膜するための制御を適切に行うことができる。
【0090】
図14は、噴霧装置の他の実施形態を示す模式図である。図14に示す噴霧装置では、噴霧部1及び対象物31をチャンバ7の内部に設けている。この例で溶液の飛散を防止することができる。この例の噴霧装置では、チャンバ7内の温度を調整する温度調整部35と、チャンバ7内の湿度を調整する湿度調整部36とを備えて、制御部6によってチャンバ7内の温度及び湿度を調整するようにしている。
【0091】
また、温度調整部35を壁34の背面に配置して、壁34の温度を調整するようにしてもよい。対象物31の温度により、アニオン溶液及びカチオン溶液の吸着量、吸着速度等が異なる場合があるので、温度調整部35により温度を調整することにより、これらを調整することができる。
【0092】
なお、噴霧部1に備えられるノズルは3つに限らず4つ以上であってもよい。この場合4つ目のノズルとしては、膜を硬化する物質を噴霧する硬化用ノズル、または、対象物31に表面電荷を与えるための表面電荷溶液用ノズルを使用することが可能である。また、溶液噴霧用に3本のノズルを設け、洗浄用に1本のノズルを設けるような構成も可能である。
【0093】
また、移動する経路として、前述したようにカチオン用ノズル11、リンス用ノズル12及びアニオン用ノズル13が同一の経路を辿ってもよいし、異なる経路を辿ってもよい。例えば、カチオン用ノズル11及びアニオン用ノズル13は主走査方向を水平方向とする同一の経路を辿り、リンス用ノズル12は主走査方向を鉛直方向とする経路を辿るようにしてもよい。
【0094】
また、対象物31を洗浄する洗浄手段として、リンス溶液または気体を噴霧するノズル(リンス用ノズル12)を用いる場合について説明したが、洗浄手段は、ノズルに限らず、振動、音波、光、超音波などを利用して対象物31を洗浄するようなものでも良い。
【0095】
また、膜厚計33は、QCMを用いる場合について説明したが、レーザ膜厚計、エリプソメータまたは光学測定器等を用いてもよい。
【0096】
また、上述した実施の形態では、噴霧装置が動作するために必要な種々の制御用のコンピュータプログラムをプログラム記憶部62に予め格納しておく場合について説明したが、これとは異なり、DVD、CD−ROM、フレキシブルディスク等の可搬型記録媒体から、このような制御用のコンピュータプログラムを制御部6に読み出して使用するようにしてもよい。
【0097】
今回開示された実施の形態はすべての点で例示であって、制限的なものでは無いと考えられるべきである。本発明の範囲は、前述した意味では無く、特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0098】
1 噴霧部
6 制御部
11 カチオン用ノズル(第2ノズル)
12 リンス用ノズル(第3ノズル:洗浄手段)
13 アニオン用ノズル(第1ノズル)
14 ノズル配置部(配置部)
31 対象物
33 膜厚計
61 演算部
62 プログラム記憶部
63 実行記憶部
64 入力データ記憶部
65 入力部
66 表示部
【特許請求の範囲】
【請求項1】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を、コンピュータに制御させるためのコンピュータプログラムであって、
前記コンピュータに、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップと
を実行させることを特徴とするコンピュータプログラム。
【請求項2】
前記コンピュータは表示部を有しており、
前記コンピュータに、
前記作成した移動すべき経路を前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項1記載のコンピュータプログラム。
【請求項3】
前記コンピュータに、
受け付けた前記第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、前記第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、前記洗浄手段に移動経路に応じて洗浄させるための第3コマンドを、受け付けた順に前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項2に記載のコンピュータプログラム。
【請求項4】
前記コンピュータに、
受け付けた前記第1コマンドの実行回数、前記第2コマンドの実行回数、及び/または、前記第3コマンドの実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項3記載のコンピュータプログラム。
【請求項5】
前記洗浄手段は、不要な物質を洗浄するリンス溶液または気体を前記対象物に噴霧する第3ノズルであり、
前記コンピュータに、
前記第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点を、前記作成した移動すべき経路に加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項2から4までの何れかに一つに記載のコンピュータプログラム。
【請求項6】
前記コンピュータに、
前記対象物の受け付けた形状を、前記作成した移動すべき経路及び空吹き点に加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項5に記載のコンピュータプログラム。
【請求項7】
前記コンピュータに、
前記空吹き点が前記対象物の形状の範囲内に存在する場合に、警告を発するステップ
をさらに実行させることを特徴とする請求項6に記載のコンピュータプログラム。
【請求項8】
前記間隔情報は、前記第1ノズル、第2ノズル及び洗浄手段間の距離、または、前記配置部における所定の位置から前記第1ノズル、第2ノズル及び洗浄手段夫々までの距離である
ことを特徴とする請求項1から7までのいずれか一つに記載のコンピュータプログラム。
【請求項9】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する方法であって、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップと
を含むことを特徴とする噴霧制御方法。
【請求項10】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する装置であって、
前記第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付ける手段と、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する手段と、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御する手段と
を備えることを特徴とする噴霧制御装置。
【請求項1】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を、コンピュータに制御させるためのコンピュータプログラムであって、
前記コンピュータに、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップと
を実行させることを特徴とするコンピュータプログラム。
【請求項2】
前記コンピュータは表示部を有しており、
前記コンピュータに、
前記作成した移動すべき経路を前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項1記載のコンピュータプログラム。
【請求項3】
前記コンピュータに、
受け付けた前記第1ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第1コマンド、前記第2ノズルに溶液または微粒子の噴霧を移動経路に応じて動作させるための第2コマンド、及び/または、前記洗浄手段に移動経路に応じて洗浄させるための第3コマンドを、受け付けた順に前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項2に記載のコンピュータプログラム。
【請求項4】
前記コンピュータに、
受け付けた前記第1コマンドの実行回数、前記第2コマンドの実行回数、及び/または、前記第3コマンドの実行回数を、対応する第1コマンド、第2コマンド、及び/または、第3コマンドに加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項3記載のコンピュータプログラム。
【請求項5】
前記洗浄手段は、不要な物質を洗浄するリンス溶液または気体を前記対象物に噴霧する第3ノズルであり、
前記コンピュータに、
前記第1ノズル、第2ノズル及び第3ノズル夫々にて溶液、微粒子または気体を空吹きする位置を示す空吹き点を、前記作成した移動すべき経路に加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項2から4までの何れかに一つに記載のコンピュータプログラム。
【請求項6】
前記コンピュータに、
前記対象物の受け付けた形状を、前記作成した移動すべき経路及び空吹き点に加えて前記表示部に表示するステップ
をさらに実行させることを特徴とする請求項5に記載のコンピュータプログラム。
【請求項7】
前記コンピュータに、
前記空吹き点が前記対象物の形状の範囲内に存在する場合に、警告を発するステップ
をさらに実行させることを特徴とする請求項6に記載のコンピュータプログラム。
【請求項8】
前記間隔情報は、前記第1ノズル、第2ノズル及び洗浄手段間の距離、または、前記配置部における所定の位置から前記第1ノズル、第2ノズル及び洗浄手段夫々までの距離である
ことを特徴とする請求項1から7までのいずれか一つに記載のコンピュータプログラム。
【請求項9】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する方法であって、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成するステップと、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御するステップと
を含むことを特徴とする噴霧制御方法。
【請求項10】
配置部に所定の間隔で配置されており、該配置部の移動に応じて夫々が互いに異なる溶液または微粒子を対象物に噴霧する第1ノズル及び第2ノズル並びに前記対象物を洗浄する洗浄手段を有する噴霧装置の動作を制御する装置であって、
前記第1ノズル、第2ノズル及び洗浄手段の移動に関する初期設定事項のデータを受け付ける手段と、
受け付けたデータに基づいて、前記第1ノズル、第2ノズル及び洗浄手段が移動すべき経路を作成する手段と、
作成した移動すべき経路、及び、記憶してある前記第1ノズル、第2ノズル及び洗浄手段間の間隔に関する間隔情報に基づき、前記第1ノズル及び第2ノズル夫々が溶液または微粒子を噴霧する際並びに前記洗浄手段が洗浄する際の前記配置部の移動を制御する手段と
を備えることを特徴とする噴霧制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−34934(P2013−34934A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−172329(P2011−172329)
【出願日】平成23年8月5日(2011.8.5)
【新規性喪失の例外の表示】特許法第30条第3項適用申請有り 平成23年2月16日から平成23年2月18日に、nano tech実行委員会主催の「nano tech 2011 第10回国際ナノテクノロジー総合展・技術会議」にて発表
【出願人】(000003355)株式会社椿本チエイン (861)
【出願人】(502435454)株式会社SNT (33)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月5日(2011.8.5)
【新規性喪失の例外の表示】特許法第30条第3項適用申請有り 平成23年2月16日から平成23年2月18日に、nano tech実行委員会主催の「nano tech 2011 第10回国際ナノテクノロジー総合展・技術会議」にて発表
【出願人】(000003355)株式会社椿本チエイン (861)
【出願人】(502435454)株式会社SNT (33)
【Fターム(参考)】
[ Back to top ]