
コンピュータ制御の液体処理ワークステーションにおける直接分注
インタフェース(1)に関するとともに、作業面(3)、少なくとも一つのピペット(6)を有する電動式分注ロボット(5)、及び、分注ロボット(5)が接続される制御コンピュータ(10)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御のためのインタフェースの使用に関する。制御コンピュータ(10)において作動する制御プログラム(11)は、分注ロボット(5)に対して、作業面(3)の特定位置(12、12’、12”)に少なくとも一つのピペット(6)を位置決め可能とし、その少なくとも一つのピペット(6)を用いてそこで特定の動作(13)を実行可能とする。インタフェース(1)は、入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)、及び電子メモリ(19)を備える。可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)で容器(4)が置かれた位置(12)、及びピペット(6)を用いて実行可能な特定動作(13)の選択を可視化することを実行する。本発明によれば、インタフェース(1)及びインタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)に少なくとも一つの指定された分注位置(12、12’、12”)を、アイコン(35)として可視化することを実行し、またさらに、特定位置(12、12’、12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12、12’、12”)に選択されたピペット(6)を位置決めするように、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を誘導することを実行する。あるいは、インタフェース(1)及びインタフェース・ソフトウェア(18)は、2次元又は3次元シミュレーションで、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を可視化するために、及び、特定位置(12、12’、12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12、12’、12”)に選択されたピペット(6)を実質的に位置決めするために実施されあるいは使用される。

【発明の詳細な説明】
【技術分野】
【0001】
関連特許出願
この国際特許出願は、2008年4月24日付けのスイス特許出願No.00644/08、及び2008年5月20日付けの米国仮出願No.61/054,668の優先権を主張する。これらの2つの優先出願の全内容は、すべての目的及び意図のため本願明細書に組み込まれる。
【0002】
発明の技術分野
本発明は、独立請求項1のプリアンブルの記載によるコンピュータ制御の液体処理ワークステーションのためのインタフェースに関する。この種の液体処理ワークステーションは、容器配置用の作業面、電動式分注ロボット、及び制御コンピュータを備える。この作業面は、本質的に水平に好ましくは配向される。分注ロボットは、液体試料を吸引及び分配するための少なくとも一つのピペットを好ましくは備える。一般的に、これらのピペットの各々は、個々のラインを介して、作動可能なポンプ、好ましくは電動ピストンポンプ、あるいはマイクロダイヤフラムポンプに流体的に接続される。通常、制御コンピュータは、分注ロボット及びそのポンプに電気的に接続される。この制御コンピュータにおいて起動された少なくとも制御プログラムの部分は、分注ロボットに対して、作業面の特定位置に少なくとも一つのピペットを位置決めし、少なくとも一つのピペットを用いてそこで特定の動作を実行することを可能にする。一般的に、そのような特定動作は、ピペット先端の受入れ、フラッシング、及び廃棄、並びに液体試料の吸引、混合、及び分配を備える動作群から選択される。
【背景技術】
【0003】
この種のコンピュータ制御の液体処理ワークステーションは、それ自身知られており、例えば、商品名FREEDOM EVOで、本願出願人によって構築され販売されている。そのような多かれ少なかれ複雑な液体処理ワークステーションは、制御コンピュータを備え、それは制御ソフトウェアを装備している。そのような制御ソフトウェアは、一般的に、試料調製又は試薬追加、希釈系列の製造、384のウェルを有するマイクロプレートの容量密度に96のウェルを有するマイクロプレートを高めること、及びさらに多くの可能な応用例の広いパレットをユーザーに提供する。制御ソフトウェアの構造に従って、ユーザーには、(好ましくは実行されたユーザー・ガイドの補助により)いわゆるスクリプトにおける連続する作業ステップの詳細な実施を確立することが期待される。この種のスクリプトは、制御コンピュータに格納可能であり、液体処理ワークステーションを用いて直ちにあるいは後で処理可能である。分注ロボットの制御は、制御コンピュータにおける制御プログラムで確立されるように、表形式において準備されたソフトウェア命令の形態におけるスクリプトに基づく。
【0004】
米国2006/0048846A1から、計測制御ソフトウェアは、液体処理装置を制御するために知られている。液体処理装置で実行される一連の作業ステップを規定するために、選択可能な手段が名称リスト(通常、プルダウンメニューとして)で表示される。このソフトウェアは、ユーザーに対して、比較的詳細なしかしむしろ複雑な方法で、コマンド(名称)のリストを組み立てることにより液体処理装置を制御可能にする。このソフトウェアによる作業は、ユニークな非検証モードによってさらに複雑になる。
【0005】
米国5,841,959から、自動液体処理装置をプログラムするためのロボットインタフェースが知られている。液体処理装置で実行される一連の作業ステップを規定するために、選択可能な手段(例えば、「吸引」、「分配」、Zドライブ上昇/下降」)が、アイコンの「文字列」を構成する一連のアイコンとして表示スクリーンに表示される。個々のアイコンは、実行されるプロセスの順序で整列される。それらの第1アイコン(装置の機能の視覚的表示を提供する)の少なくとも一つは、選択可能であり、第1アイコンの少なくとも一つでの機能、装置の副機能を表わす第2アイコンの少なくとも一つを備える第2アイコンを示すように拡張可能である。また、このロボットのインタフェースは、ユーザーに対して、アイコンの機能を編集することも含めて、比較的詳細なしかしむしろ複雑な方法で、コマンド(アイコン)のリストを組み立てることにより液体処理装置を制御可能にする。
【0006】
米国2008/0063570A1から、試料分析器は、試薬配列部、分析部、表示装置、入力装置、及び、試薬配列を表示し、特定の試薬に関する複数の試薬マークを示すための表示制御部を含むことが知られている。表示上の各試薬マークの配列は、試薬配列部での各試薬の配列に対応することにより、表示制御部は、表示装置上で入力装置によって選択された試薬マークに相当する試薬に関する詳細情報を表示する。複雑な情報及び動作(試料と試薬の供給、試料と試薬の混合、及びそれら混合物の分析)は、管理タッチスクリーンを介してモニター及び制御可能である。そのタッチスクリーンは、分析の開始及び終了を形成するスタート及びストップボタンをさらに供える。
【0007】
WO 00/70490 A2から、自動生物学的検定準備及び高分子精製を実行するための方法、装置、製品、及びユーザー・インタフェースが知られている。また、検定法及び高分子精製を準備するためのグラフィカル・ユーザー・インターフェース(GUI)が開示される。フローチャートにより論証されるように、ユーザーの特定方法パラメータ及びステップの異なる組が規定され互いに比較されており、ステップの組が交互に実行される。あるいは、ユーザーの特定方法パラメータの第1組が作成され、作業ステップの組を実行する前にインターン不適合に関してチェックされる。全ての組は、多様な検査及び/又は決定ステップを備える。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国2006/0048846A1
【特許文献2】米国5,841,959
【特許文献3】米国2008/0063570A1
【特許文献4】WO 00/70490 A2
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、コンピュータ制御の液体処理ワークステーションが、容易な液体処理動作を実行するためのプログラムスクリプトを準備することなく、遠隔的にリアルタイムで制御可能なことを用いた、インタフェース及び/又は方法を提案することである。
【課題を解決するための手段】
【0010】
この目的は、独立請求項1又は2のそれぞれの特徴による第1態様により達成され、これらは、コンピュータ制御の液体処理ワークステーション用の、インタフェースの2つの別の説明が提案されている。そのワークステーションは、
(a) 容器の配置のため本質的に水平に配向された作業面と;
(b) 液体試料を吸引及び分配するための少なくとも一つのピペットを有する電動式分注ロボットと;
(c) 分注ロボットが電気的に接続される制御コンピュータであって、この制御コンピュータで作動される少なくとも制御プログラム部分が作業面の特定位置に少なくとも一つのピペットを位置決めすること、及び少なくとも一つのピペットを用いてそこで特定動作を実行することを分注ロボットに対して可能にする制御コンピュータと、を備え、
インタフェースは、制御コンピュータに接続可能であり、又はその中に統合され、入力手段、可視化手段、インタフェース・ソフトウェア、及び電子メモリを備え、可視化手段は、アイコンの形態で、液体処理ワークステーションの作業面に容器が置かれた位置を、及び少なくとも一つのピペットを用いて実行可能な特定の動作の選択を、可視化することを少なくとも実行し、及び、それらのピペット及び位置に関する情報は、電子メモリに格納され、インタフェース・ソフトウェアを用いてそこから取り出し可能である。
【0011】
発明の第1及び好ましい別の形態によるコンュータ制御の液体処理ワークステーション用のインタフェースは、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、インタフェース及びインタフェース・ソフトウェアがアイコンとして可視化することを実行すること、並びに、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に位置決めするためにコンピュータ制御の液体処理ワークステーションの分注ロボットを誘導することをインタフェース及びインタフェース・ソフトウェアが実行すること、によって特徴付けられる。
【0012】
発明の別の第2によるコンピュータ制御の液体処理ワークステーション用のインタフェースは、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、インタフェース及びインタフェース・ソフトウェアがアイコンとして可視化することを実行すること、並びに、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に事実上位置決めするためにコンピュータ制御の液体処理ワークステーションの分注ロボットを2次元あるいは3次元シミュレーションでインタフェース及びインタフェース・ソフトウェアが可視化することを実行すること、によって特徴付けられる。
【0013】
この目的は、独立請求項11又は12のそれぞれの特徴による第2態様により達成され、そこでは、2つの別の説明がコンピュータ制御の液体処理ワークステーションの遠隔制御に関して提案されている。
【0014】
発明による方法は、コンピュータ制御の液体処理ワークステーション用のインタフェースの使用を規定し、そのワークステーションは、
(a) 容器の配置のための、本質的に水平に配向された作業面;
(b) 液体試料を吸引及び分配するための少なくとも一つのピペットを有する電動式分注ロボット;
(c) 分注ロボットに電気的に接続される制御コンピュータであって、この制御コンピュータで起動される少なくとも制御プログラム部分が、分注ロボットに対して、作業面の特定位置に少なくとも一つのピペットを位置決めすること、及び、少なくとも一つのピペットを用いてそこで特定の動作を実行することを可能にする制御コンピュータ、を備え、
インタフェースは、制御コンピュータに接続されるか、あるいはそこに統合され、また入力手段、可視化手段、インタフェース・ソフトウェア、及び電子メモリを備え、可視化手段は、液体処理ワークステーションの作業面で容器が置かれた位置を、及び、少なくとも一つのピペットを用いて実行可能な特定動作の選択を、アイコンの形態で可視化することを少なくとも実行し、並びに、それらのピペット及び位置に関する情報は、電子メモリに格納され、インタフェース・ソフトウェアを用いて、そこから取り出される。
【0015】
本発明の第1及び好ましい別の態様による方法は、インタフェース及びインタフェース・ソフトウェアが、入力手段あるいはインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定の容器で少なくとも一つの指定された分注位置をアイコンとして可視化するために用いられること、並びに、インタフェース及びインタフェース・ソフトウェアが、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に位置決めするために、コンピュータ制御の液体処理ワークステーションの分注ロボットを誘導するのに用いられること、により特徴付けられる。
【0016】
本発明の別の第2による方法は、インタフェース及びインタフェース・ソフトウェアが、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、アイコンとして可視化することに用いられること、並びに、インタフェース及びインタフェース・ソフトウェアが、コンピュータ制御の液体処理ワークステーションの分注ロボットを2次元あるいは3次元シミュレーションで可視化することに用いられること、及び、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に事実上位置決めすることに用いられること、によって特徴付けられる。
【0017】
発明による追加の好ましい特徴は、特定の従属請求項に記載される。
【0018】
本発明の文脈において、用語「遠隔あるいは遠隔に」は、「液体処理ワークステーションの制御コンピュータを制御するためのヒトにより達成される入力手段」として理解されるべきである。そのような入力手段の例は、例えばキーボードとして既知である。
【0019】
用語「電気的に接続」は、分注ロボットと制御コンピュータとの間の接続を記述し、「電気的に伝導性のワイヤ、無線接続、電子接続により、あるいは電磁波を用いたいずれの有用な接続によって機能的に接続された」として理解されるべきである。
【0020】
用語「制御コンピュータ」は、例えば、ワークステーションに組み込まれたマイクロプロセッサー・チップ、パーソナルコンピュータに組み込まれたマイクロプロセッサー・チップ、あるいは他の内部又は外部のデジタル制御装置として実行される「いずれのデジタル制御装置」として理解されるべきである。
【0021】
用語「流体」は、「ガスあるいは液体、又はガス/液体の混合物のようないずれの非固体の物質」として理解されるべきである。従って、用語「流体的に接続」は、「流体が接続ラインを通過することができるような接続」として理解されるべきである。
【発明の効果】
【0022】
本発明は以下の利点を備える。
− 複合液体処理ワークステーションは、直観的な操作を可能にする単純なインタフェースを用いて遠隔制御可能である。特定のピペットが、指あるいは器具を用いてアイコンあるいは仮想スイッチに触れることによりタッチスクリーン上で選択可能であり、インタフェースが液体処理ワークステーションに直ちに作業を実行させることから、特定の動作がそれらのピペットに割り当てることができる。
【0023】
− インタフェースにおけるコマンド入力の迅速な実行は、液体処理ワークステーションでリアルタイムで視覚的に監視可能であり、その結果、ユーザーには、例えば指やコントロールペンを用いて液体処理ワークステーションの全体をコントロールしているという印象が生じる。
【0024】
− 2次元又は3次元のシミュレーションにおけるコンピュータ制御の液体処理ワークステーションの分注ロボットの可視化、及び特定位置を指定した直後に特定容器の指定された分注位置に選択されたピペットを事実上位置決めすることは、液体処理ワークステーションの現実のロボットを占有する必要無く、ユーザーに、特定動作及び一連の特定動作を構成することを可能にする。また、完全なオフライン作業、及び液体処理ワークステーションへの制限された、あるいはいずれの接続も無く、特定動作及び一連の特定動作の準備及び記憶が可能である。しかしながら、選択されたピペット、位置、及び動作の光学的制御のみが仮想である。
【0025】
− 双方向のエラー処理は、実行中あるいは誘発されるプロセスにおいて迅速な進行を可能にする。例えば、意図した液体量が選択された容器から吸引できない場合(例えばトラフが空であるので)、ユーザーは、適切な別のコマンドを入力することができる。例えば、そこから必要な液体量を吸引するために、ピペットを用いて、別のトラフが作動可能である。しかしながら、また、空のトラフへ補充を行うか、あるいは充填されたものと取り替えることができる。
【図面の簡単な説明】
【0026】
【図1】図1は、インタフェースを介在した液体処理ワークステーションに関してユーザーの状況の全体図を示す。
【図2】図2は、分注ロボットを有する液体処理ワークステーションの作業面の平面図を示し、様々な実験機器(容器)が作業面に設けられている。
【図3】図3は、好ましい実施形態による可視化手段(表示スクリーン)の、選択された実験機器(マイクロプレート)を有する第1スクリーンショットを示す図である。
【図4】図4は、任意の動作及び動作の任意のシーケンスを有する主な作業レベルのフローチャートを示す。
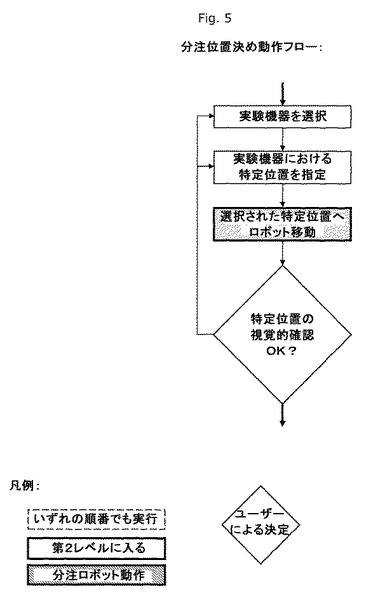
【図5】図5は、動作の固定シーケンスを有する第2作業レベルの第1フローチャートにおける分注位置の選択を示す。
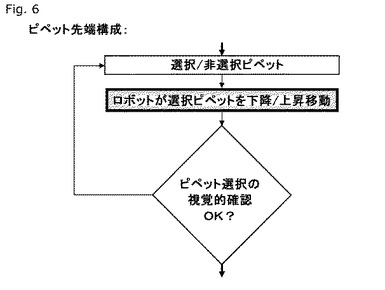
【図6】図6は、動作の固定シーケンスを有する第2作業レベルの第2フローチャートにおけるピペット先端の構成を示す。
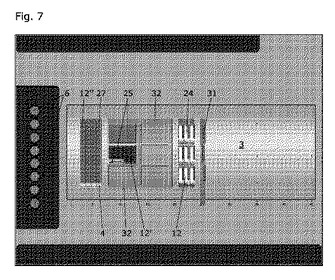
【図7】好ましい実施形態による可視化手段(表示スクリーン)の、液体処理ワークステーションの作業面のレイアウトを有する第2スクリーンショットを示す図である。
【発明を実施するための形態】
【0027】
本発明は、この出願に添付した図を用いて、より詳しく以下に説明される。これらの図は、発明の範囲を制限せずに、発明の好ましい実施形態を開示する。
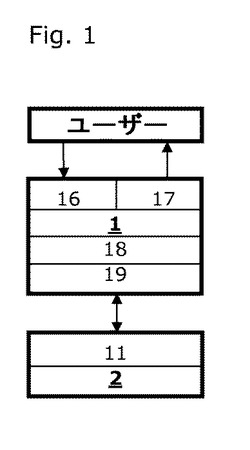
図1は、発明による、間に置かれたインタフェースを有する液体処理ワークステーションに関してユーザーの状況の全体図を示す。このインタフェース1は、コンピュータ制御の液体処理ワークステーション2の遠隔制御が可能である。
【0028】
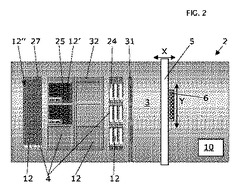
図2は、分注ロボット5を有する液体処理ワークステーション2の作業面の平面図を示し、様々な容器4が作業面3に設けられている。試料チューブ27のような好ましい容器4、それは好ましくは液体処理ワークステーション2の作業面3のいわゆる「ラック」に置かれる、の選択、又は、例えば24,96、384あるいは1536のウェルを有するマイクロプレート25が示されている。好ましい容器は、また、いわゆるトラフ24、及び少なくとも一時的に液体を蓄えるための更なる容器4’、4”を含んでいる。
【0029】
更に、ワークステーション2は、液体試料7を吸引及び分配するための少なくとも一つのピペット6を有する電動式分注ロボット5を備える。ここに示される分注ロボット5は、液体処理ワークステーション2の長手方向軸(X)に移動可能であり、8つのピペット6を有し、ピペットはそれぞれがピペット先端14を有し液体処理ワークステーション2の作業面3にわたり横方向に、X軸に垂直な方向(Y)に移動可能であり、この作業面3のいかなる任意の場所でも降下可能である。
【0030】
各ピペット6は、好ましくは、個々のライン8を介して動作可能なポンプ9に流体的に接続される。このことは、液体(例えばシステム液体)、ガス(例えば不活性ガス)あるいはこれらの両方(例えば空気隙間を有するシステム液体)の組み合わせがポンプの搬送エレメントとピペット6及び/又はそのピペット先端14との間に存在し、どちらかを用いて液体試料7が吸引され及び/又は分配されることを意味する。ポンプの搬送エレメントは、ポンプ・ピストン、ダイヤフラム、あるいはこれら両方の組み合わせであってもよい。ギヤーホイール・ポンプあるいは蠕動ポンプもまた液体を搬送(吸引及び/又は分配)するために使用可能であり、実際、コンピュータ制御の液体処理ワークステーション2に関する発明によるインタフェース1は、液体及び/又は流体を搬送するために用いられる特定のポンプ技術とは事実上無関係である。
【0031】
さらに、液体処理ワークステーション2は、制御コンピュータ10を備え、それには分注ロボット5(及び/又はそのドライブ、これはここには示されない)及びそのポンプ9(及び/又はそのドライブ、これもここには示されない)が電気的に接続される。この制御コンピュータ10にて作動する少なくとも制御プログラム11部分は、分注ロボット5に対して、少なくとも一つのピペット6を作業面3の特定位置12、12’、12”に位置決めし、少なくとも一つのピペット6を用いてそこで特定の動作13を実行することを可能にする。その特定動作は、液体処理の分野から当業者に知られており、ピペット先端14の受け入れ、フラッシング、及び/又は廃棄、及び、液体試料7の体積15の吸引、混合、及び/又は分配することを含む。選択された動作13あるいは選択された動作のシーケンスによって、制御プログラム10は、分注ロボット5に対してそれらを実行可能にする。そのような特定位置12、12’、12”は、トラフ24の内側12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0032】
発明によるインタフェース1は、制御コンピュータ10に好ましくは接続される。しかしながら、それはこの制御コンピュータ10に統合されたほうがよい。別個のインタフェースの利点は、その柔軟性及び動きやすさであり、必要とされ、所望の場合には一時的にのみに、このインタフェースを異なる液体処理ワークステーション2で使用されることを可能にする。特定の液体処理ワークステーション2の制御コンピュータ10に統合されたインタフェース1の利点は、例えば、インタフェース1が制御コンピュータ10及び既に設けられたその周辺機器のコンピュータの性能に参加可能であるということである。
【0033】
制御コンピュータ10は、好ましくはパーソナルコンピュータ(PC)あるいはワークステーション2に統合されたプロセッサである。従って、ワークステーション2(CPUを埋め込んだ)に統合されるか、単にそれに利用可能になるかにかかわらず、いかなる電子処理装置(CPU)も制御コンピュータ10として理解される。
【0034】
発明によるインタフェース1は、(図1に示されるように)、入力手段16、可視化手段17、インタフェース・ソフトウェア18、及び電子メモリ19を備える。
【0035】
コンピューター・マウス21あるいはタッチパッド22を備えたグループから選ばれる入力手段16が好ましい。これらの2つの別の入力手段は、表示スクリーン上で矢印あるいは別のインジケータを移動することができ、かつ仮想スイッチ28、28’、あるいはいわゆる「アイコン」35をその上でクリックすることができる。入力手段16(例えば指接触による)として、また、可視化手段17としても同時に使用されることから、センサ・表示スクリーン23の使用、つまり、いわゆる「タッチスクリーン」が特に好ましい。入力手段16のリストは、任意に延ばすことができる。よって、例えば、グラフィック・タブレットあるいはジョイスティックも、インタフェース1の可視化された操作エレメントの選択及び操作のため用いることができる。
【0036】
可視化手段17は、液体処理ワークステーション2の作業面3で容器4が置かれる位置12、12’、12”で利用可能なピペット6、及び、ピペット6を用いて実行可能な特定動作13の選択を可視化するために少なくとも実行される。実験機器アイテムの、それらのピペット6及び位置12、12’、12”に関する必要な情報がインタフェース1に蓄えられるために、それは、要求に応じてインタフェース・ソフトウェア18を用いてその情報が回復可能である電子メモリ19を備える。
【0037】
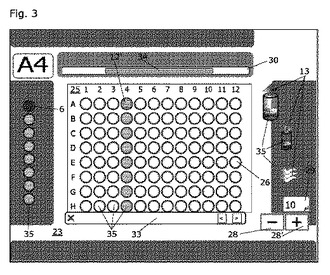
図3は、好ましい実施態様による好ましい可視化手段(センサ・表示スクリーン23)の第1スクリーンショットを示す。ここで選択された実験機器は、96のウェル26を有するマイクロプレート25である。
【0038】
コンピュータ制御の液体処理ワークステーション2の遠隔制御は、以下のように行なわれる。即ち、可視化手段17を用いてアイコン35として可視化された、少なくとも一つの利用可能なピペット6、一つの特定動作13、及び/又は特定の容器4あるいは実験機器の位置12、12’、12”を選択することにより、入力手段16を用いて、分注ロボット5が実験機器上で選択された位置12、12’、12”に少なくとも一つの選択されたピペット6を位置決めし、及び/又は、選択されたピペット6を用いて選択された特定動作13を実行するように、インタフェース・ソフトウェア18は、制御プログラム11を直接に動作する。そのような特定位置12、12’、12”は、トラフ24の内部12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0039】
詳しくは、この種の遠隔制御された液体処理作業は、以下のように実行される。例えば、
1. 最上部のピペット6(液体処理ワークステーション2の作業面3で最後のもの)が図3のスクリーンショットで選択されている(図3の左側を参照)。ここでは、これは、指又はツール(操作スタイラス)、そのようなツールはグラフィック・ユーザー・インタフェース(いわゆる「GUI」)での作業から既知であるように、を用いてピペット6をタッピングすることにより実行される。あるいは、このピペット6は、マウスを用いたクリック、あるいはタッチパッドを用いた選択により選択可能である。示されるように、表示スクリーン上の対応部分は、好ましくは色を変更する。さらに、クリックの直後に、選択されたピペット(複数可)は、作業者にピペット6のその選択を光学的に確認可能とするため、しばらくの時間と距離で分注ロボット5によって下方へ移動される。
【0040】
2. 特定の動作13として、ユーザーは「吸引」を選択していると、それに際して対応するアイコン35は、より大きく示され、灰色のオプション・フィールド(図3の右側を参照)から少なくとも部分的に前に移動される。
【0041】
3. 仮想スイッチ28、28’を作動することにより、ユーザーは、ボリューム表示装置29で可視であるように、10μlまでの所望の容積をセットする。
【0042】
4. そしてユーザーは、また、目標動作を決定する。つまり、分注ロボット5がマイクロプレート25のウェルA/4(ここでは波線の正方形により強調される)の上方に最後のピペット6を直ちに位置決めするウェルA/4をタッピングにより決定する。ピペット6に関して選択された位置(例えば表示スクリーン上で左上)は、同時に表示される。さらに、オプション(ここで選択されなかった)は、液体試料7(容器内へ向けられた矢印を有するアイコン35)を分配すること、及びピペット先端を洗浄すること(3つの波によって識別されるアイコン35)を備える。
【0043】
5. 分注あるいは分配プロセスを開始するために、ユーザーは、選択したプロセスの表示又は容器(ここではウェルA/4)の選択上で、ある時間、指、ツール又は別の表示及び/又は入力装置を保持しなければならない。このことは、意図して起動するプロセスのみが実行され、例えば、意図していないアイコン35のタッピングは、プロセスを起動できないという利点を有する。さらに、追加の動作ボタンが必要なく、コマンドを認識するためのビープ信号(それは同僚を悩ますことがある)も無くて済ますことができる。
【0044】
約5〜10秒のドウェル時間又は作動時間が好ましい。しかしながら、この時間はまた延長又は短縮することができる。状態表示30は、好ましくは、第1機能を有するステータスバー34を備える。つまりドウェル時間又は作動時間の経過が表示され、その結果、この状態表示30のステータスバー34は、ドウェル時間又は作動時間の経過にともない完全に満たされる。特定動作13が良好に終了したときは、ステータスバー34にて再び表示され、それは、好ましくは、肯定的な結果の場合には緑色を取り、否定的な結果の場合には赤色を取る。
【0045】
好ましくは、液体試料7の体積15を増加あるいは減少するための少なくとも1個の仮想スイッチ28、28’は、可視化手段17を用いて可視化される。現在選択された体積15は、好ましくはボリューム表示装置29に目で見えるようにする。可視化手段17を用いて、実験機器選択表示部33もまた好ましくは目に見えるようになる。このような好ましい実験機器選択表示部33は、可視化された図を切り換えるための仮想Xボタンを備える。例えば、そのXボタンをクリックあるいはタッピングすることにより、図4の表示スクリーンに切り換えられる。種々の使い捨てのピペット先端、いわゆる「使い捨て先端」(図示せず)の選択のような、追加の表示スクリーンの表示もまた選択可能である。そのような好ましい実験機器選択表示部33も、また、好ましくは前進ボタン(>)及び後進ボタン(<)を備え、その結果、液体処理ワークステーション2の作業面3に存在し、電子メモリ19に蓄えられる容器4又は「実験機器」の個々のタイプは、スクロールを用いて選択可能である。
【0046】
簡単に記述された作業ステップをより詳しく説明し、発明によるインタフェースによる作業の容易さ及び柔軟さを実例で明らかにするために、フローチャートが出願に加えられている。
【0047】
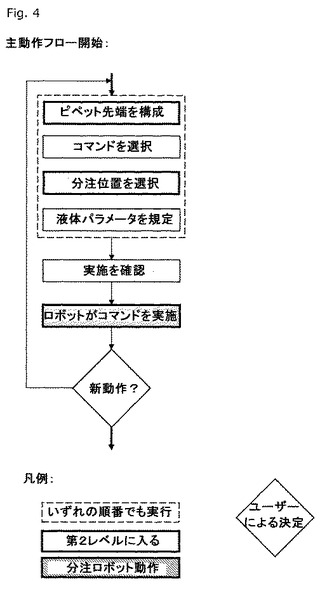
図4は、任意の動作及び動作の任意のシーケンスとともに主たる作業レベルのフローチャートを示す。この主動作フローチャートは、第1レベル動作の4つを示しており、これは以下からなる(示されるようなシーケンスにおいて):
【0048】
ピペット構成
これは、意図する特定動作(詳細は図6を参照)を実行するために選択された一もしくは複数のピペット6を規定するための任意の動作である。規定直後、一若しくは複数のピペット6は、操作者にピペット構成を光学的に確認可能とするため、ある時間及び距離で、分注ロボット5により下へ移動される。あるいは、インタフェース1は、要求された特定動作又は特定動作のシーケンスによる、及び規定された特定位置12、12’、12”の数による、ピペット構成を自動的に規定する。
【0049】
コマンドの選択
これは、例えば吸引、分配、混合から特定の動作を選択するための必須の動作である。
【0050】
分注位置の選択
これは、特定動作が実行されねばならない(図5参照)特定の位置12、12’、12”を規定するための必須の動作である。
【0051】
液体パラメータの規定
これは任意の動作である。なぜならば、要求された液体パラメータは、既に規定可能である(もしそうでない場合、ユーザーは、既に示されたように、体積、分注される試料の液体クラス、等を規定することができる)。
【0052】
ソフトウェアが要求された動作の作動を自動的に集めるように、それら4つの動作を選択する実際のシーケンスは重要ではないことを指摘することは重要である。よって、ユーザーは、ユーザーが最も好む順番でそれらの動作を実行することができる。いずれの場合でも、ある動作を実行ためにユーザーが要求するところで液体処理装置は指示されねばならないので、操作者は、分注位置を選択しなければならない。
【0053】
図5は、動作の固定シーケンスとともに第2作業レベルのフローチャートにおける分注位置の選択を示す:
1. 実験機器(例えば、24、96あるいは384のウェルを有するマイクロプレート25)が選択されている。この選択は、所望の液体処理プロセスによる単一の実験機器あるいは多くの実験機器に対処することができる。
【0054】
2. 選択された実験機器に関して動作が実行されねばならない特定位置12、12’、12”(ウェル26)が指定されるべきである。この指定は、所望の液体処理プロセスによる及び選択されたピペット構成による、単一のウェル又は複数のウェルに対処することができる。そのような特定位置12、12’、12”は、トラフ24の内部12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0055】
3. 実験機器が選択され、その実験機器における位置が指定されるとすぐに、液体処理あるいは分注ロボット5は、即座に選択されたピペット先端14を実験機器の指定された特定位置12、12’、12”に移動する。このことは、液体処理ロボット5が正しい場所で要求された動作を有効に実行するか否かをユーザーに直ちに及び光学的に制御することを可能にする。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0056】
正しいピペット、動作、及びパラメータを選択した後に、ユーザーは、意図しない操作(上記5項参照)を実行することを避けるために、選択されたプロセスの表示、あるドウェル時間又は作動時間に関する選択された容器4(あるいは追加の確認キー)を動作させねばならない。よってユーザーは、必須の動作(図4を参照)として次のステップ「実施を確認」を行っている。その後(ドウェル時間又は作動時間の完了直後)、液体処理あるいは分注ロボット5は、コマンドを実行する(図4の最後のステップを参照)。コマンドの完了後、同一のあるいは類似のスキームにより、新しい動作が選択可能である。
【0057】
図6は、固定の動作シーケンスを有する第2作業レベルの第2のフローチャートにおけるピペット6の構成を示す。即ち、
【0058】
1. 一つ以上のピペット6が入力手段16を用いることにより所望の液体処理プロセスに従い選択される。あるいは、インタフェース1は、要求された特定動作又は特定動作のシーケンスにより、及び規定された特定位置12、12’、12”の数により、ピペット選択を自動的に規定する。
【0059】
2. ピペット構成を規定する際、選択された一又は複数のピペット6は、操作者のピペット構成を操作者に対して光学的に確認可能とするため、直ちに分注ロボット5によってしばらくの時間及び距離で下降及び上昇される。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0060】
液体処理ロボット5のピペット6にピペット先端14が装着されていない場合、ピペット先端14を取り上げるための空コーンを有する選択されたピペット6が、代わりに、実験機器の指定の位置12、12’、12”に移動される。その後、ユーザーは、ピペット先端14が取り付けられることになる(又は、液体処理あるいは分注ロボット5が誤ったピペット先端14を運んでいる場合に交換されることになる)ことを認識するだろう。選択は、既に装着されたピペット先端14を先に廃棄することを備えることができる。ピペット先端14が選択されるとすぐに、液体処理ロボット5は、即座にそのそれぞれのピペット・コーンを選択されたピペット先端14に移動する。このことは、ユーザーに対して、液体処理あるいは分注ロボット5が要求されたピペット先端を有効に拾い上げるか否かを、直ちに光学的に制御することを可能にする。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0061】
正しい動作、パラメータ、及びピペット先端を選択した後に、ユーザーは、意図しない操作(上記5項参照)を実行することを避けるために、選択されたプロセスの表示、あるドウェル時間又は作動時間に関する選択された容器4(あるいは追加の確認キー)を動作させねばならない。よってユーザーは、必須の動作(図4を参照)として次のステップ「実施を確認」を行っている。その後(ドウェル時間又は作動時間の完了直後)、液体処理ロボット5は、コマンドを実行する(図4の最後のステップを参照)。コマンドの完了後、同一のあるいは類似のスキームにより、新しい動作が選択可能である。
【0062】
図7は、液体処理ワークステーションの作業面のレイアウトを有する、好ましい実施形態による可視化手段17(表示スクリーン)の第2スクリーンショットを示す。既に述べたように、可視化手段17は、利用可能なピペット6、液体処理ワークステーション2の作業面3に容器4が置かれる位置12、及びピペット6を用いて実行可能な特定動作13の選択がアイコン35として図で表示され、及び入力手段16を用いて選択可能である、グラフィック・ユーザー・インタフェース(GUI)、画像投射装置、あるいは表示スクリーン20であることができる。コンピュータの表示スクリーン、テレビの表示スクリーン、及び他のモニターのような、全てのタイプの表示スクリーンが考慮される。いわゆる「ビデオ・プロジェクター」あるいはプロジェクターが画像投影装置として使用可能である。可視化のための画像は、壁、スクリーン、あるいはまた観察者の網膜(例えばプロジェクター光景)上あるいは内に投影される。2つの搬送器具32、ここではそれらは3つのマイクロプレートを運ぶことを実行する、も示されている。さらに、洗浄ステーション31が示されており、これは一つ又は複数の洗浄液を用いてピペット先端をフラッシングすることができる。
【0063】
入力手段16は、特に好ましくは、利用可能なピペット6、液体処理ワークステーション2の作業面3に容器4が置かれる位置12、及びピペット6を用いて実行可能な特定動作13の選択がアイコン35として図で表示され及び指接触により選択可能である、表示スクリーン23である。
【0064】
図3に示されるように、少なくとも一つの容器4は、可視化手段17を用いて可視化可能であり、その容器は、少なくとも一つのトラフ24、多くのウェル26を有する少なくとも一つのマイクロプレート25、あるいは少なくとも一つの試料チューブ27を備えた一群の容器から選択される。可視化手段17を用いて目に見えるようになった容器4をタッピングするかクリックすることは、その選択、及び同時に図3によるディスプレイへの切り換えをもたらす。好ましくは、少なくとも一つの状態表示30は、可視化手段17を用いて可視化され、待機及び/又は作動時間の経過、あるいは特定動作13の現在実行されている作業の質を表示する。
【0065】
コンピュータ制御の液体処理ワークステーション2の遠隔制御のための好ましい方法は、利用可能なピペット6及び液体処理ワークステーション2の作業面3上の容器4の位置12に関する情報が、ユーザーによって視覚的に得られ、手動で電子メモリ19に格納されるという点で特徴づけられる。
【0066】
コンピュータ制御の液体処理ワークステーション2の遠隔制御のための特に好ましい方法は、利用可能なピペット6及び液体処理ワークステーション2の作業面3上の容器4の位置12に関する情報が、制御コンピュータ10によって自動的に認識され、インタフェース1の電子メモリ19に格納されるという点で特徴づけられる。利用可能なピペット6の、特に、鋼あるいはプラスチックの針、種々の備品(例えばフィルタ)及び/又は容積を有する使い捨てのピペット先端のような使用されるピペット先端の、自動認識は、例えば、分注ロボット5に取り付けられた液位検出によって、好ましくはインタフェース1に使用可能になり、また例えば、インタフェース1の電子メモリ19に容易に伝送されてもよい。容器4の位置12、及び液体処理ワークステーション2の作業面3でのそれらのタイプ(試料チューブ27、マイクロプレート25、トラフ24などのような)の自動認識は、RFID(無線自動識別)方法の助けにより好ましくは実施され、各容器4には、好ましくは、いわゆるRFIDラベルあるいは「RFIDタグ」が装着される。バーコードの適用もまた、容器のタイプの識別、及びそれらの位置の確定を可能にする。容器のタイプ、ピペットのタイプ、及びそれらの位置を単に視覚的に得る別のものとして、カメラ(例えばビデオカメラ)もまた、この目的に用いられてもよい。そのデータは、適当なソフトウェアを介して処理用のコンピューターに供給される。
【0067】
ちょうど実行された特定動作13のシーケンスは、電子メモリ19に好ましくは蓄えられ、その結果、このシーケンスは、特定動作13の同一のシーケンスとして、後に、このメモリ19から検索可能であり、一度あるいはまた複数回、自動的に実行可能である。
【0068】
発明によるインタフェース1は、コマンド、容器、及び個々の動作の直感的な双方向の選択を可能にする。個々の動作は、一連の動作シーケンスに繰り返して組み立てられることができ、その結果、例えば、再分注、希釈系列の製造、及び384のウェルを有するマイクロプレートへの96のウェルを有するマイクロプレートの容量密度の間に必要とされるように、複雑な処理シーケンスが実行可能である。単一動作用の、また全処理シーケンス用の選択された制御コマンドは、好ましくは電子メモリに蓄えられ、必要なときに検索可能であり、結果として、一度又は複数回処理される(好ましくは自動的に)。
【0069】
図における参照符号の各々は、それぞれの場合において詳細に記述されていなくても、同一の構成部分を示す。
【符号の説明】
【0070】
1 インタフェース、2 液体処理ワークステーション、3 作業面、
4、4’、4” 容器、5 分注ロボット、6 ピペット、7 液体試料、
8 個々のライン、9 動作可能ポンプ、10 制御コンピュータ、
11 制御プログラム、12、12’、12” 位置、13 特定動作、
14 ピペット先端、15 体積、16 入力手段、17 可視化手段、
18 インタフェース・ソフトウェア、19 電子メモリ、20 表示スクリーン、
21 コンピューター・マウス、22タッチパッド、23 センサ・表示スクリーン、
24 トラフ、25 マイクロプレート、26 ウェル、27 試料チューブ、
28、28’ 仮想スイッチ、29 ボリューム表示装置、30 状態表示、
31 洗浄ステーション、32 搬送器具、33 実験機器選択ディスプレイ、
34 ステータスバー、35 アイコン。
【技術分野】
【0001】
関連特許出願
この国際特許出願は、2008年4月24日付けのスイス特許出願No.00644/08、及び2008年5月20日付けの米国仮出願No.61/054,668の優先権を主張する。これらの2つの優先出願の全内容は、すべての目的及び意図のため本願明細書に組み込まれる。
【0002】
発明の技術分野
本発明は、独立請求項1のプリアンブルの記載によるコンピュータ制御の液体処理ワークステーションのためのインタフェースに関する。この種の液体処理ワークステーションは、容器配置用の作業面、電動式分注ロボット、及び制御コンピュータを備える。この作業面は、本質的に水平に好ましくは配向される。分注ロボットは、液体試料を吸引及び分配するための少なくとも一つのピペットを好ましくは備える。一般的に、これらのピペットの各々は、個々のラインを介して、作動可能なポンプ、好ましくは電動ピストンポンプ、あるいはマイクロダイヤフラムポンプに流体的に接続される。通常、制御コンピュータは、分注ロボット及びそのポンプに電気的に接続される。この制御コンピュータにおいて起動された少なくとも制御プログラムの部分は、分注ロボットに対して、作業面の特定位置に少なくとも一つのピペットを位置決めし、少なくとも一つのピペットを用いてそこで特定の動作を実行することを可能にする。一般的に、そのような特定動作は、ピペット先端の受入れ、フラッシング、及び廃棄、並びに液体試料の吸引、混合、及び分配を備える動作群から選択される。
【背景技術】
【0003】
この種のコンピュータ制御の液体処理ワークステーションは、それ自身知られており、例えば、商品名FREEDOM EVOで、本願出願人によって構築され販売されている。そのような多かれ少なかれ複雑な液体処理ワークステーションは、制御コンピュータを備え、それは制御ソフトウェアを装備している。そのような制御ソフトウェアは、一般的に、試料調製又は試薬追加、希釈系列の製造、384のウェルを有するマイクロプレートの容量密度に96のウェルを有するマイクロプレートを高めること、及びさらに多くの可能な応用例の広いパレットをユーザーに提供する。制御ソフトウェアの構造に従って、ユーザーには、(好ましくは実行されたユーザー・ガイドの補助により)いわゆるスクリプトにおける連続する作業ステップの詳細な実施を確立することが期待される。この種のスクリプトは、制御コンピュータに格納可能であり、液体処理ワークステーションを用いて直ちにあるいは後で処理可能である。分注ロボットの制御は、制御コンピュータにおける制御プログラムで確立されるように、表形式において準備されたソフトウェア命令の形態におけるスクリプトに基づく。
【0004】
米国2006/0048846A1から、計測制御ソフトウェアは、液体処理装置を制御するために知られている。液体処理装置で実行される一連の作業ステップを規定するために、選択可能な手段が名称リスト(通常、プルダウンメニューとして)で表示される。このソフトウェアは、ユーザーに対して、比較的詳細なしかしむしろ複雑な方法で、コマンド(名称)のリストを組み立てることにより液体処理装置を制御可能にする。このソフトウェアによる作業は、ユニークな非検証モードによってさらに複雑になる。
【0005】
米国5,841,959から、自動液体処理装置をプログラムするためのロボットインタフェースが知られている。液体処理装置で実行される一連の作業ステップを規定するために、選択可能な手段(例えば、「吸引」、「分配」、Zドライブ上昇/下降」)が、アイコンの「文字列」を構成する一連のアイコンとして表示スクリーンに表示される。個々のアイコンは、実行されるプロセスの順序で整列される。それらの第1アイコン(装置の機能の視覚的表示を提供する)の少なくとも一つは、選択可能であり、第1アイコンの少なくとも一つでの機能、装置の副機能を表わす第2アイコンの少なくとも一つを備える第2アイコンを示すように拡張可能である。また、このロボットのインタフェースは、ユーザーに対して、アイコンの機能を編集することも含めて、比較的詳細なしかしむしろ複雑な方法で、コマンド(アイコン)のリストを組み立てることにより液体処理装置を制御可能にする。
【0006】
米国2008/0063570A1から、試料分析器は、試薬配列部、分析部、表示装置、入力装置、及び、試薬配列を表示し、特定の試薬に関する複数の試薬マークを示すための表示制御部を含むことが知られている。表示上の各試薬マークの配列は、試薬配列部での各試薬の配列に対応することにより、表示制御部は、表示装置上で入力装置によって選択された試薬マークに相当する試薬に関する詳細情報を表示する。複雑な情報及び動作(試料と試薬の供給、試料と試薬の混合、及びそれら混合物の分析)は、管理タッチスクリーンを介してモニター及び制御可能である。そのタッチスクリーンは、分析の開始及び終了を形成するスタート及びストップボタンをさらに供える。
【0007】
WO 00/70490 A2から、自動生物学的検定準備及び高分子精製を実行するための方法、装置、製品、及びユーザー・インタフェースが知られている。また、検定法及び高分子精製を準備するためのグラフィカル・ユーザー・インターフェース(GUI)が開示される。フローチャートにより論証されるように、ユーザーの特定方法パラメータ及びステップの異なる組が規定され互いに比較されており、ステップの組が交互に実行される。あるいは、ユーザーの特定方法パラメータの第1組が作成され、作業ステップの組を実行する前にインターン不適合に関してチェックされる。全ての組は、多様な検査及び/又は決定ステップを備える。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国2006/0048846A1
【特許文献2】米国5,841,959
【特許文献3】米国2008/0063570A1
【特許文献4】WO 00/70490 A2
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、コンピュータ制御の液体処理ワークステーションが、容易な液体処理動作を実行するためのプログラムスクリプトを準備することなく、遠隔的にリアルタイムで制御可能なことを用いた、インタフェース及び/又は方法を提案することである。
【課題を解決するための手段】
【0010】
この目的は、独立請求項1又は2のそれぞれの特徴による第1態様により達成され、これらは、コンピュータ制御の液体処理ワークステーション用の、インタフェースの2つの別の説明が提案されている。そのワークステーションは、
(a) 容器の配置のため本質的に水平に配向された作業面と;
(b) 液体試料を吸引及び分配するための少なくとも一つのピペットを有する電動式分注ロボットと;
(c) 分注ロボットが電気的に接続される制御コンピュータであって、この制御コンピュータで作動される少なくとも制御プログラム部分が作業面の特定位置に少なくとも一つのピペットを位置決めすること、及び少なくとも一つのピペットを用いてそこで特定動作を実行することを分注ロボットに対して可能にする制御コンピュータと、を備え、
インタフェースは、制御コンピュータに接続可能であり、又はその中に統合され、入力手段、可視化手段、インタフェース・ソフトウェア、及び電子メモリを備え、可視化手段は、アイコンの形態で、液体処理ワークステーションの作業面に容器が置かれた位置を、及び少なくとも一つのピペットを用いて実行可能な特定の動作の選択を、可視化することを少なくとも実行し、及び、それらのピペット及び位置に関する情報は、電子メモリに格納され、インタフェース・ソフトウェアを用いてそこから取り出し可能である。
【0011】
発明の第1及び好ましい別の形態によるコンュータ制御の液体処理ワークステーション用のインタフェースは、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、インタフェース及びインタフェース・ソフトウェアがアイコンとして可視化することを実行すること、並びに、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に位置決めするためにコンピュータ制御の液体処理ワークステーションの分注ロボットを誘導することをインタフェース及びインタフェース・ソフトウェアが実行すること、によって特徴付けられる。
【0012】
発明の別の第2によるコンピュータ制御の液体処理ワークステーション用のインタフェースは、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、インタフェース及びインタフェース・ソフトウェアがアイコンとして可視化することを実行すること、並びに、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に事実上位置決めするためにコンピュータ制御の液体処理ワークステーションの分注ロボットを2次元あるいは3次元シミュレーションでインタフェース及びインタフェース・ソフトウェアが可視化することを実行すること、によって特徴付けられる。
【0013】
この目的は、独立請求項11又は12のそれぞれの特徴による第2態様により達成され、そこでは、2つの別の説明がコンピュータ制御の液体処理ワークステーションの遠隔制御に関して提案されている。
【0014】
発明による方法は、コンピュータ制御の液体処理ワークステーション用のインタフェースの使用を規定し、そのワークステーションは、
(a) 容器の配置のための、本質的に水平に配向された作業面;
(b) 液体試料を吸引及び分配するための少なくとも一つのピペットを有する電動式分注ロボット;
(c) 分注ロボットに電気的に接続される制御コンピュータであって、この制御コンピュータで起動される少なくとも制御プログラム部分が、分注ロボットに対して、作業面の特定位置に少なくとも一つのピペットを位置決めすること、及び、少なくとも一つのピペットを用いてそこで特定の動作を実行することを可能にする制御コンピュータ、を備え、
インタフェースは、制御コンピュータに接続されるか、あるいはそこに統合され、また入力手段、可視化手段、インタフェース・ソフトウェア、及び電子メモリを備え、可視化手段は、液体処理ワークステーションの作業面で容器が置かれた位置を、及び、少なくとも一つのピペットを用いて実行可能な特定動作の選択を、アイコンの形態で可視化することを少なくとも実行し、並びに、それらのピペット及び位置に関する情報は、電子メモリに格納され、インタフェース・ソフトウェアを用いて、そこから取り出される。
【0015】
本発明の第1及び好ましい別の態様による方法は、インタフェース及びインタフェース・ソフトウェアが、入力手段あるいはインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定の容器で少なくとも一つの指定された分注位置をアイコンとして可視化するために用いられること、並びに、インタフェース及びインタフェース・ソフトウェアが、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に位置決めするために、コンピュータ制御の液体処理ワークステーションの分注ロボットを誘導するのに用いられること、により特徴付けられる。
【0016】
本発明の別の第2による方法は、インタフェース及びインタフェース・ソフトウェアが、入力手段又はインタフェースにより任意に選択された少なくとも一つのピペットを、及び、特定容器の少なくとも一つの指定された分注位置を、アイコンとして可視化することに用いられること、並びに、インタフェース及びインタフェース・ソフトウェアが、コンピュータ制御の液体処理ワークステーションの分注ロボットを2次元あるいは3次元シミュレーションで可視化することに用いられること、及び、特定位置を指定した直後で選択された特定動作を実行する前に、選択されたピペットを特定容器の指定された分注位置に事実上位置決めすることに用いられること、によって特徴付けられる。
【0017】
発明による追加の好ましい特徴は、特定の従属請求項に記載される。
【0018】
本発明の文脈において、用語「遠隔あるいは遠隔に」は、「液体処理ワークステーションの制御コンピュータを制御するためのヒトにより達成される入力手段」として理解されるべきである。そのような入力手段の例は、例えばキーボードとして既知である。
【0019】
用語「電気的に接続」は、分注ロボットと制御コンピュータとの間の接続を記述し、「電気的に伝導性のワイヤ、無線接続、電子接続により、あるいは電磁波を用いたいずれの有用な接続によって機能的に接続された」として理解されるべきである。
【0020】
用語「制御コンピュータ」は、例えば、ワークステーションに組み込まれたマイクロプロセッサー・チップ、パーソナルコンピュータに組み込まれたマイクロプロセッサー・チップ、あるいは他の内部又は外部のデジタル制御装置として実行される「いずれのデジタル制御装置」として理解されるべきである。
【0021】
用語「流体」は、「ガスあるいは液体、又はガス/液体の混合物のようないずれの非固体の物質」として理解されるべきである。従って、用語「流体的に接続」は、「流体が接続ラインを通過することができるような接続」として理解されるべきである。
【発明の効果】
【0022】
本発明は以下の利点を備える。
− 複合液体処理ワークステーションは、直観的な操作を可能にする単純なインタフェースを用いて遠隔制御可能である。特定のピペットが、指あるいは器具を用いてアイコンあるいは仮想スイッチに触れることによりタッチスクリーン上で選択可能であり、インタフェースが液体処理ワークステーションに直ちに作業を実行させることから、特定の動作がそれらのピペットに割り当てることができる。
【0023】
− インタフェースにおけるコマンド入力の迅速な実行は、液体処理ワークステーションでリアルタイムで視覚的に監視可能であり、その結果、ユーザーには、例えば指やコントロールペンを用いて液体処理ワークステーションの全体をコントロールしているという印象が生じる。
【0024】
− 2次元又は3次元のシミュレーションにおけるコンピュータ制御の液体処理ワークステーションの分注ロボットの可視化、及び特定位置を指定した直後に特定容器の指定された分注位置に選択されたピペットを事実上位置決めすることは、液体処理ワークステーションの現実のロボットを占有する必要無く、ユーザーに、特定動作及び一連の特定動作を構成することを可能にする。また、完全なオフライン作業、及び液体処理ワークステーションへの制限された、あるいはいずれの接続も無く、特定動作及び一連の特定動作の準備及び記憶が可能である。しかしながら、選択されたピペット、位置、及び動作の光学的制御のみが仮想である。
【0025】
− 双方向のエラー処理は、実行中あるいは誘発されるプロセスにおいて迅速な進行を可能にする。例えば、意図した液体量が選択された容器から吸引できない場合(例えばトラフが空であるので)、ユーザーは、適切な別のコマンドを入力することができる。例えば、そこから必要な液体量を吸引するために、ピペットを用いて、別のトラフが作動可能である。しかしながら、また、空のトラフへ補充を行うか、あるいは充填されたものと取り替えることができる。
【図面の簡単な説明】
【0026】
【図1】図1は、インタフェースを介在した液体処理ワークステーションに関してユーザーの状況の全体図を示す。
【図2】図2は、分注ロボットを有する液体処理ワークステーションの作業面の平面図を示し、様々な実験機器(容器)が作業面に設けられている。
【図3】図3は、好ましい実施形態による可視化手段(表示スクリーン)の、選択された実験機器(マイクロプレート)を有する第1スクリーンショットを示す図である。
【図4】図4は、任意の動作及び動作の任意のシーケンスを有する主な作業レベルのフローチャートを示す。
【図5】図5は、動作の固定シーケンスを有する第2作業レベルの第1フローチャートにおける分注位置の選択を示す。
【図6】図6は、動作の固定シーケンスを有する第2作業レベルの第2フローチャートにおけるピペット先端の構成を示す。
【図7】好ましい実施形態による可視化手段(表示スクリーン)の、液体処理ワークステーションの作業面のレイアウトを有する第2スクリーンショットを示す図である。
【発明を実施するための形態】
【0027】
本発明は、この出願に添付した図を用いて、より詳しく以下に説明される。これらの図は、発明の範囲を制限せずに、発明の好ましい実施形態を開示する。
図1は、発明による、間に置かれたインタフェースを有する液体処理ワークステーションに関してユーザーの状況の全体図を示す。このインタフェース1は、コンピュータ制御の液体処理ワークステーション2の遠隔制御が可能である。
【0028】
図2は、分注ロボット5を有する液体処理ワークステーション2の作業面の平面図を示し、様々な容器4が作業面3に設けられている。試料チューブ27のような好ましい容器4、それは好ましくは液体処理ワークステーション2の作業面3のいわゆる「ラック」に置かれる、の選択、又は、例えば24,96、384あるいは1536のウェルを有するマイクロプレート25が示されている。好ましい容器は、また、いわゆるトラフ24、及び少なくとも一時的に液体を蓄えるための更なる容器4’、4”を含んでいる。
【0029】
更に、ワークステーション2は、液体試料7を吸引及び分配するための少なくとも一つのピペット6を有する電動式分注ロボット5を備える。ここに示される分注ロボット5は、液体処理ワークステーション2の長手方向軸(X)に移動可能であり、8つのピペット6を有し、ピペットはそれぞれがピペット先端14を有し液体処理ワークステーション2の作業面3にわたり横方向に、X軸に垂直な方向(Y)に移動可能であり、この作業面3のいかなる任意の場所でも降下可能である。
【0030】
各ピペット6は、好ましくは、個々のライン8を介して動作可能なポンプ9に流体的に接続される。このことは、液体(例えばシステム液体)、ガス(例えば不活性ガス)あるいはこれらの両方(例えば空気隙間を有するシステム液体)の組み合わせがポンプの搬送エレメントとピペット6及び/又はそのピペット先端14との間に存在し、どちらかを用いて液体試料7が吸引され及び/又は分配されることを意味する。ポンプの搬送エレメントは、ポンプ・ピストン、ダイヤフラム、あるいはこれら両方の組み合わせであってもよい。ギヤーホイール・ポンプあるいは蠕動ポンプもまた液体を搬送(吸引及び/又は分配)するために使用可能であり、実際、コンピュータ制御の液体処理ワークステーション2に関する発明によるインタフェース1は、液体及び/又は流体を搬送するために用いられる特定のポンプ技術とは事実上無関係である。
【0031】
さらに、液体処理ワークステーション2は、制御コンピュータ10を備え、それには分注ロボット5(及び/又はそのドライブ、これはここには示されない)及びそのポンプ9(及び/又はそのドライブ、これもここには示されない)が電気的に接続される。この制御コンピュータ10にて作動する少なくとも制御プログラム11部分は、分注ロボット5に対して、少なくとも一つのピペット6を作業面3の特定位置12、12’、12”に位置決めし、少なくとも一つのピペット6を用いてそこで特定の動作13を実行することを可能にする。その特定動作は、液体処理の分野から当業者に知られており、ピペット先端14の受け入れ、フラッシング、及び/又は廃棄、及び、液体試料7の体積15の吸引、混合、及び/又は分配することを含む。選択された動作13あるいは選択された動作のシーケンスによって、制御プログラム10は、分注ロボット5に対してそれらを実行可能にする。そのような特定位置12、12’、12”は、トラフ24の内側12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0032】
発明によるインタフェース1は、制御コンピュータ10に好ましくは接続される。しかしながら、それはこの制御コンピュータ10に統合されたほうがよい。別個のインタフェースの利点は、その柔軟性及び動きやすさであり、必要とされ、所望の場合には一時的にのみに、このインタフェースを異なる液体処理ワークステーション2で使用されることを可能にする。特定の液体処理ワークステーション2の制御コンピュータ10に統合されたインタフェース1の利点は、例えば、インタフェース1が制御コンピュータ10及び既に設けられたその周辺機器のコンピュータの性能に参加可能であるということである。
【0033】
制御コンピュータ10は、好ましくはパーソナルコンピュータ(PC)あるいはワークステーション2に統合されたプロセッサである。従って、ワークステーション2(CPUを埋め込んだ)に統合されるか、単にそれに利用可能になるかにかかわらず、いかなる電子処理装置(CPU)も制御コンピュータ10として理解される。
【0034】
発明によるインタフェース1は、(図1に示されるように)、入力手段16、可視化手段17、インタフェース・ソフトウェア18、及び電子メモリ19を備える。
【0035】
コンピューター・マウス21あるいはタッチパッド22を備えたグループから選ばれる入力手段16が好ましい。これらの2つの別の入力手段は、表示スクリーン上で矢印あるいは別のインジケータを移動することができ、かつ仮想スイッチ28、28’、あるいはいわゆる「アイコン」35をその上でクリックすることができる。入力手段16(例えば指接触による)として、また、可視化手段17としても同時に使用されることから、センサ・表示スクリーン23の使用、つまり、いわゆる「タッチスクリーン」が特に好ましい。入力手段16のリストは、任意に延ばすことができる。よって、例えば、グラフィック・タブレットあるいはジョイスティックも、インタフェース1の可視化された操作エレメントの選択及び操作のため用いることができる。
【0036】
可視化手段17は、液体処理ワークステーション2の作業面3で容器4が置かれる位置12、12’、12”で利用可能なピペット6、及び、ピペット6を用いて実行可能な特定動作13の選択を可視化するために少なくとも実行される。実験機器アイテムの、それらのピペット6及び位置12、12’、12”に関する必要な情報がインタフェース1に蓄えられるために、それは、要求に応じてインタフェース・ソフトウェア18を用いてその情報が回復可能である電子メモリ19を備える。
【0037】
図3は、好ましい実施態様による好ましい可視化手段(センサ・表示スクリーン23)の第1スクリーンショットを示す。ここで選択された実験機器は、96のウェル26を有するマイクロプレート25である。
【0038】
コンピュータ制御の液体処理ワークステーション2の遠隔制御は、以下のように行なわれる。即ち、可視化手段17を用いてアイコン35として可視化された、少なくとも一つの利用可能なピペット6、一つの特定動作13、及び/又は特定の容器4あるいは実験機器の位置12、12’、12”を選択することにより、入力手段16を用いて、分注ロボット5が実験機器上で選択された位置12、12’、12”に少なくとも一つの選択されたピペット6を位置決めし、及び/又は、選択されたピペット6を用いて選択された特定動作13を実行するように、インタフェース・ソフトウェア18は、制御プログラム11を直接に動作する。そのような特定位置12、12’、12”は、トラフ24の内部12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0039】
詳しくは、この種の遠隔制御された液体処理作業は、以下のように実行される。例えば、
1. 最上部のピペット6(液体処理ワークステーション2の作業面3で最後のもの)が図3のスクリーンショットで選択されている(図3の左側を参照)。ここでは、これは、指又はツール(操作スタイラス)、そのようなツールはグラフィック・ユーザー・インタフェース(いわゆる「GUI」)での作業から既知であるように、を用いてピペット6をタッピングすることにより実行される。あるいは、このピペット6は、マウスを用いたクリック、あるいはタッチパッドを用いた選択により選択可能である。示されるように、表示スクリーン上の対応部分は、好ましくは色を変更する。さらに、クリックの直後に、選択されたピペット(複数可)は、作業者にピペット6のその選択を光学的に確認可能とするため、しばらくの時間と距離で分注ロボット5によって下方へ移動される。
【0040】
2. 特定の動作13として、ユーザーは「吸引」を選択していると、それに際して対応するアイコン35は、より大きく示され、灰色のオプション・フィールド(図3の右側を参照)から少なくとも部分的に前に移動される。
【0041】
3. 仮想スイッチ28、28’を作動することにより、ユーザーは、ボリューム表示装置29で可視であるように、10μlまでの所望の容積をセットする。
【0042】
4. そしてユーザーは、また、目標動作を決定する。つまり、分注ロボット5がマイクロプレート25のウェルA/4(ここでは波線の正方形により強調される)の上方に最後のピペット6を直ちに位置決めするウェルA/4をタッピングにより決定する。ピペット6に関して選択された位置(例えば表示スクリーン上で左上)は、同時に表示される。さらに、オプション(ここで選択されなかった)は、液体試料7(容器内へ向けられた矢印を有するアイコン35)を分配すること、及びピペット先端を洗浄すること(3つの波によって識別されるアイコン35)を備える。
【0043】
5. 分注あるいは分配プロセスを開始するために、ユーザーは、選択したプロセスの表示又は容器(ここではウェルA/4)の選択上で、ある時間、指、ツール又は別の表示及び/又は入力装置を保持しなければならない。このことは、意図して起動するプロセスのみが実行され、例えば、意図していないアイコン35のタッピングは、プロセスを起動できないという利点を有する。さらに、追加の動作ボタンが必要なく、コマンドを認識するためのビープ信号(それは同僚を悩ますことがある)も無くて済ますことができる。
【0044】
約5〜10秒のドウェル時間又は作動時間が好ましい。しかしながら、この時間はまた延長又は短縮することができる。状態表示30は、好ましくは、第1機能を有するステータスバー34を備える。つまりドウェル時間又は作動時間の経過が表示され、その結果、この状態表示30のステータスバー34は、ドウェル時間又は作動時間の経過にともない完全に満たされる。特定動作13が良好に終了したときは、ステータスバー34にて再び表示され、それは、好ましくは、肯定的な結果の場合には緑色を取り、否定的な結果の場合には赤色を取る。
【0045】
好ましくは、液体試料7の体積15を増加あるいは減少するための少なくとも1個の仮想スイッチ28、28’は、可視化手段17を用いて可視化される。現在選択された体積15は、好ましくはボリューム表示装置29に目で見えるようにする。可視化手段17を用いて、実験機器選択表示部33もまた好ましくは目に見えるようになる。このような好ましい実験機器選択表示部33は、可視化された図を切り換えるための仮想Xボタンを備える。例えば、そのXボタンをクリックあるいはタッピングすることにより、図4の表示スクリーンに切り換えられる。種々の使い捨てのピペット先端、いわゆる「使い捨て先端」(図示せず)の選択のような、追加の表示スクリーンの表示もまた選択可能である。そのような好ましい実験機器選択表示部33も、また、好ましくは前進ボタン(>)及び後進ボタン(<)を備え、その結果、液体処理ワークステーション2の作業面3に存在し、電子メモリ19に蓄えられる容器4又は「実験機器」の個々のタイプは、スクロールを用いて選択可能である。
【0046】
簡単に記述された作業ステップをより詳しく説明し、発明によるインタフェースによる作業の容易さ及び柔軟さを実例で明らかにするために、フローチャートが出願に加えられている。
【0047】
図4は、任意の動作及び動作の任意のシーケンスとともに主たる作業レベルのフローチャートを示す。この主動作フローチャートは、第1レベル動作の4つを示しており、これは以下からなる(示されるようなシーケンスにおいて):
【0048】
ピペット構成
これは、意図する特定動作(詳細は図6を参照)を実行するために選択された一もしくは複数のピペット6を規定するための任意の動作である。規定直後、一若しくは複数のピペット6は、操作者にピペット構成を光学的に確認可能とするため、ある時間及び距離で、分注ロボット5により下へ移動される。あるいは、インタフェース1は、要求された特定動作又は特定動作のシーケンスによる、及び規定された特定位置12、12’、12”の数による、ピペット構成を自動的に規定する。
【0049】
コマンドの選択
これは、例えば吸引、分配、混合から特定の動作を選択するための必須の動作である。
【0050】
分注位置の選択
これは、特定動作が実行されねばならない(図5参照)特定の位置12、12’、12”を規定するための必須の動作である。
【0051】
液体パラメータの規定
これは任意の動作である。なぜならば、要求された液体パラメータは、既に規定可能である(もしそうでない場合、ユーザーは、既に示されたように、体積、分注される試料の液体クラス、等を規定することができる)。
【0052】
ソフトウェアが要求された動作の作動を自動的に集めるように、それら4つの動作を選択する実際のシーケンスは重要ではないことを指摘することは重要である。よって、ユーザーは、ユーザーが最も好む順番でそれらの動作を実行することができる。いずれの場合でも、ある動作を実行ためにユーザーが要求するところで液体処理装置は指示されねばならないので、操作者は、分注位置を選択しなければならない。
【0053】
図5は、動作の固定シーケンスとともに第2作業レベルのフローチャートにおける分注位置の選択を示す:
1. 実験機器(例えば、24、96あるいは384のウェルを有するマイクロプレート25)が選択されている。この選択は、所望の液体処理プロセスによる単一の実験機器あるいは多くの実験機器に対処することができる。
【0054】
2. 選択された実験機器に関して動作が実行されねばならない特定位置12、12’、12”(ウェル26)が指定されるべきである。この指定は、所望の液体処理プロセスによる及び選択されたピペット構成による、単一のウェル又は複数のウェルに対処することができる。そのような特定位置12、12’、12”は、トラフ24の内部12、マイクロプレート25のウェル12’、及び試料チューブの内部12”から選択される。
【0055】
3. 実験機器が選択され、その実験機器における位置が指定されるとすぐに、液体処理あるいは分注ロボット5は、即座に選択されたピペット先端14を実験機器の指定された特定位置12、12’、12”に移動する。このことは、液体処理ロボット5が正しい場所で要求された動作を有効に実行するか否かをユーザーに直ちに及び光学的に制御することを可能にする。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0056】
正しいピペット、動作、及びパラメータを選択した後に、ユーザーは、意図しない操作(上記5項参照)を実行することを避けるために、選択されたプロセスの表示、あるドウェル時間又は作動時間に関する選択された容器4(あるいは追加の確認キー)を動作させねばならない。よってユーザーは、必須の動作(図4を参照)として次のステップ「実施を確認」を行っている。その後(ドウェル時間又は作動時間の完了直後)、液体処理あるいは分注ロボット5は、コマンドを実行する(図4の最後のステップを参照)。コマンドの完了後、同一のあるいは類似のスキームにより、新しい動作が選択可能である。
【0057】
図6は、固定の動作シーケンスを有する第2作業レベルの第2のフローチャートにおけるピペット6の構成を示す。即ち、
【0058】
1. 一つ以上のピペット6が入力手段16を用いることにより所望の液体処理プロセスに従い選択される。あるいは、インタフェース1は、要求された特定動作又は特定動作のシーケンスにより、及び規定された特定位置12、12’、12”の数により、ピペット選択を自動的に規定する。
【0059】
2. ピペット構成を規定する際、選択された一又は複数のピペット6は、操作者のピペット構成を操作者に対して光学的に確認可能とするため、直ちに分注ロボット5によってしばらくの時間及び距離で下降及び上昇される。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0060】
液体処理ロボット5のピペット6にピペット先端14が装着されていない場合、ピペット先端14を取り上げるための空コーンを有する選択されたピペット6が、代わりに、実験機器の指定の位置12、12’、12”に移動される。その後、ユーザーは、ピペット先端14が取り付けられることになる(又は、液体処理あるいは分注ロボット5が誤ったピペット先端14を運んでいる場合に交換されることになる)ことを認識するだろう。選択は、既に装着されたピペット先端14を先に廃棄することを備えることができる。ピペット先端14が選択されるとすぐに、液体処理ロボット5は、即座にそのそれぞれのピペット・コーンを選択されたピペット先端14に移動する。このことは、ユーザーに対して、液体処理あるいは分注ロボット5が要求されたピペット先端を有効に拾い上げるか否かを、直ちに光学的に制御することを可能にする。このユニークな特徴は、ユーザーが液体処理ロボットを、例えばユーザーの指先の移動で命令するという印象をユーザーに与える。
【0061】
正しい動作、パラメータ、及びピペット先端を選択した後に、ユーザーは、意図しない操作(上記5項参照)を実行することを避けるために、選択されたプロセスの表示、あるドウェル時間又は作動時間に関する選択された容器4(あるいは追加の確認キー)を動作させねばならない。よってユーザーは、必須の動作(図4を参照)として次のステップ「実施を確認」を行っている。その後(ドウェル時間又は作動時間の完了直後)、液体処理ロボット5は、コマンドを実行する(図4の最後のステップを参照)。コマンドの完了後、同一のあるいは類似のスキームにより、新しい動作が選択可能である。
【0062】
図7は、液体処理ワークステーションの作業面のレイアウトを有する、好ましい実施形態による可視化手段17(表示スクリーン)の第2スクリーンショットを示す。既に述べたように、可視化手段17は、利用可能なピペット6、液体処理ワークステーション2の作業面3に容器4が置かれる位置12、及びピペット6を用いて実行可能な特定動作13の選択がアイコン35として図で表示され、及び入力手段16を用いて選択可能である、グラフィック・ユーザー・インタフェース(GUI)、画像投射装置、あるいは表示スクリーン20であることができる。コンピュータの表示スクリーン、テレビの表示スクリーン、及び他のモニターのような、全てのタイプの表示スクリーンが考慮される。いわゆる「ビデオ・プロジェクター」あるいはプロジェクターが画像投影装置として使用可能である。可視化のための画像は、壁、スクリーン、あるいはまた観察者の網膜(例えばプロジェクター光景)上あるいは内に投影される。2つの搬送器具32、ここではそれらは3つのマイクロプレートを運ぶことを実行する、も示されている。さらに、洗浄ステーション31が示されており、これは一つ又は複数の洗浄液を用いてピペット先端をフラッシングすることができる。
【0063】
入力手段16は、特に好ましくは、利用可能なピペット6、液体処理ワークステーション2の作業面3に容器4が置かれる位置12、及びピペット6を用いて実行可能な特定動作13の選択がアイコン35として図で表示され及び指接触により選択可能である、表示スクリーン23である。
【0064】
図3に示されるように、少なくとも一つの容器4は、可視化手段17を用いて可視化可能であり、その容器は、少なくとも一つのトラフ24、多くのウェル26を有する少なくとも一つのマイクロプレート25、あるいは少なくとも一つの試料チューブ27を備えた一群の容器から選択される。可視化手段17を用いて目に見えるようになった容器4をタッピングするかクリックすることは、その選択、及び同時に図3によるディスプレイへの切り換えをもたらす。好ましくは、少なくとも一つの状態表示30は、可視化手段17を用いて可視化され、待機及び/又は作動時間の経過、あるいは特定動作13の現在実行されている作業の質を表示する。
【0065】
コンピュータ制御の液体処理ワークステーション2の遠隔制御のための好ましい方法は、利用可能なピペット6及び液体処理ワークステーション2の作業面3上の容器4の位置12に関する情報が、ユーザーによって視覚的に得られ、手動で電子メモリ19に格納されるという点で特徴づけられる。
【0066】
コンピュータ制御の液体処理ワークステーション2の遠隔制御のための特に好ましい方法は、利用可能なピペット6及び液体処理ワークステーション2の作業面3上の容器4の位置12に関する情報が、制御コンピュータ10によって自動的に認識され、インタフェース1の電子メモリ19に格納されるという点で特徴づけられる。利用可能なピペット6の、特に、鋼あるいはプラスチックの針、種々の備品(例えばフィルタ)及び/又は容積を有する使い捨てのピペット先端のような使用されるピペット先端の、自動認識は、例えば、分注ロボット5に取り付けられた液位検出によって、好ましくはインタフェース1に使用可能になり、また例えば、インタフェース1の電子メモリ19に容易に伝送されてもよい。容器4の位置12、及び液体処理ワークステーション2の作業面3でのそれらのタイプ(試料チューブ27、マイクロプレート25、トラフ24などのような)の自動認識は、RFID(無線自動識別)方法の助けにより好ましくは実施され、各容器4には、好ましくは、いわゆるRFIDラベルあるいは「RFIDタグ」が装着される。バーコードの適用もまた、容器のタイプの識別、及びそれらの位置の確定を可能にする。容器のタイプ、ピペットのタイプ、及びそれらの位置を単に視覚的に得る別のものとして、カメラ(例えばビデオカメラ)もまた、この目的に用いられてもよい。そのデータは、適当なソフトウェアを介して処理用のコンピューターに供給される。
【0067】
ちょうど実行された特定動作13のシーケンスは、電子メモリ19に好ましくは蓄えられ、その結果、このシーケンスは、特定動作13の同一のシーケンスとして、後に、このメモリ19から検索可能であり、一度あるいはまた複数回、自動的に実行可能である。
【0068】
発明によるインタフェース1は、コマンド、容器、及び個々の動作の直感的な双方向の選択を可能にする。個々の動作は、一連の動作シーケンスに繰り返して組み立てられることができ、その結果、例えば、再分注、希釈系列の製造、及び384のウェルを有するマイクロプレートへの96のウェルを有するマイクロプレートの容量密度の間に必要とされるように、複雑な処理シーケンスが実行可能である。単一動作用の、また全処理シーケンス用の選択された制御コマンドは、好ましくは電子メモリに蓄えられ、必要なときに検索可能であり、結果として、一度又は複数回処理される(好ましくは自動的に)。
【0069】
図における参照符号の各々は、それぞれの場合において詳細に記述されていなくても、同一の構成部分を示す。
【符号の説明】
【0070】
1 インタフェース、2 液体処理ワークステーション、3 作業面、
4、4’、4” 容器、5 分注ロボット、6 ピペット、7 液体試料、
8 個々のライン、9 動作可能ポンプ、10 制御コンピュータ、
11 制御プログラム、12、12’、12” 位置、13 特定動作、
14 ピペット先端、15 体積、16 入力手段、17 可視化手段、
18 インタフェース・ソフトウェア、19 電子メモリ、20 表示スクリーン、
21 コンピューター・マウス、22タッチパッド、23 センサ・表示スクリーン、
24 トラフ、25 マイクロプレート、26 ウェル、27 試料チューブ、
28、28’ 仮想スイッチ、29 ボリューム表示装置、30 状態表示、
31 洗浄ステーション、32 搬送器具、33 実験機器選択ディスプレイ、
34 ステータスバー、35 アイコン。
【特許請求の範囲】
【請求項1】
コンピュータ制御の液体処理ワークステーション(2)用のインタフェース(1)であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続可能あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択、をアイコン(35)の形で可視化することを少なくとも実行し、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納可能であり、インタフェース・ソフトウェア(18)を用いてそこから検索可能であり、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)をアイコン(35)として可視化することを実行し、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を位置決めするために、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を移動することを実行する、
ことを特徴とするインタフェース。
【請求項2】
コンピュータ制御の液体処理ワークステーション(2)用のインタフェース(1)であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続可能あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することを少なくとも実行し、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納可能であり、インタフェース・ソフトウェア(18)を用いてそこから検索可能であり、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することを実行し、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置を指定した直後で、選択された特定動作を実行する前に、特定の容器の指定された分注位置に選択されたピペットを事実上位置決めするために、コンピュータ制御の液体処理ワークステーションの分注ロボットを、2次元又は3次元シミュレーションにおいて可視化することを実行する、
ことを特徴とするインタフェース。
【請求項3】
可視化手段(17)は、グラフィック・ユーザー・インタフェース(GUI)、画像投影装置、又は表示スクリーン(20)であることを特徴とする、請求項1又は2に記載のインタフェース。
【請求項4】
入力手段(16)は、コンピューター・マウス(21)、タッチパッド(22)、グラフィック・タブレット、ジョイスティック、及びセンサ・表示スクリーン(23)を備えた群から選択されることを特徴とする、請求項1から3のいずれかに記載のインタフェース。
【請求項5】
入力手段(16)は、利用可能なピペット(6)、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)、及びピペット(6)を用いて実行可能な特定動作(13)の選択が触れること又はクリックすることにより選択可能であるセンサ・表示スクリーン(23)であることを特徴とする、請求項1から4のいずれかに記載のインタフェース。
【請求項6】
少なくとも一つの容器(4)は、少なくとも一つのトラフ(24)、複数のウェル(26)を有する少なくとも一つのマイクロプレート(25)、及び少なくとも一つの試料チューブ(27)あるいはこれらのいずれかの組み合わせを備えた一群の容器から選択されることを特徴とする、請求項1から5のいずれかに記載のインタフェース。
【請求項7】
液体試料(7)の体積(15)を増加又は減少するための少なくとも一つの仮想スイッチ(28、28’)は、可視化手段(17)を用いて可視化可能であり、現在選択された体積(15)は、ボリューム表示装置(29)において目に見えることを特徴とする、請求項1から6のいずれかに記載のインタフェース。
【請求項8】
少なくとも一つの状態表示(30)は、ドウェル時間又は作動時間の経過、及び実施された特定動作(13)の質を表示する可視化手段(17)を用いて可視化可能であることを特徴とする、請求項1から7のいずれかに記載のインタフェース。
【請求項9】
各ピペット(6)は、個々のライン(8)を介して動作可能なポンプ(9)に流体的に接続されることを特徴とする、請求項1から8のいずれかに記載のインタフェース。
【請求項10】
特定動作(13)は、ピペット先端(14)の受入れ、フラッシング及び廃棄と、液体試料(7)の体積(15)の吸引、混合、及び分配を備えた一群の動作から選択可能であることを特徴とする、請求項1から9のいずれかに記載のインタフェース。
【請求項11】
インタフェース(1)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御用の方法であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することに使用され、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納され、インタフェース・ソフトウェア(18)を用いてそこから検索され、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することに使用され、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を位置決めするために、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を移動することに使用される、
ことを特徴とする方法。
【請求項12】
インタフェース(1)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御用の方法であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することに使用され、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納され、インタフェース・ソフトウェア(18)を用いてそこから検索され、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することに使用され、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を、2次元又は3次元シミュレーションにおいて可視化することに、及び特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を事実上位置決めすることに、使用される、
ことを特徴とする方法。
【請求項13】
ユーザーは、液体処理ロボット(5)が有効に所望位置(12、12’、12”)に移動したか否かを光学的に制御することを特徴とする、請求項11に記載の方法。
【請求項14】
利用可能なピペット(6)、及び液体処理ワークステーション(2)の作業面(3)での容器(4)の位置(12)に関する情報は、ユーザーによって視覚的に得られ、電子メモリ(19)に手動で格納されることを特徴とする、請求項11又は13に記載の方法。
【請求項15】
利用可能なピペット(6)、及び液体処理ワークステーション(2)の作業面(3)での容器(4)の位置(12)に関する情報は、制御コンピュータ(10)によって自動的に認識され、インタフェース(1)の電子メモリ(19)に格納されることを特徴とする、請求項11から13のいずれかに記載の方法。
【請求項16】
特定動作(13)の実行されたシーケンスは、電子メモリ(19)に格納され、後に、特定動作(13)の同一のシーケンスとしてこのメモリ(19)から検索され自動的に実行されることを特徴とする、請求項11から15のいずれかに記載の方法。
【請求項17】
直接に選択されたあるいは以前に格納された特定動作(13)を、又は特定動作(13)のシーケンスを実行している間、既存のエラーを改善するために、双方向の介在がそれらの動作の一つにおいて行われることを特徴とする、請求項11から16のいずれかに記載の方法。
【請求項18】
特定動作(13)は、ピペット先端(14)の受入れ、フラッシング及び廃棄と、液体試料(7)の体積(15)の吸引、混合、及び分配とを備えた一群の動作から選択されることを特徴とする、請求項11から17のいずれかに記載の方法。
【請求項19】
少なくとも一つの利用可能なピペット(6)及び少なくとも一つの特定動作(13)及び特定の容器(4)の特定位置(12、12’、12”)は、入力手段(16)を用いて選択され、この入力手段は、分注ロボット(5)が少なくとも一つの選択されたピペット(6)を選択された位置(12、12’、12”)に直接に位置決めするように、制御プログラム(11)がインタフェース・ソフトウェア(18)を介して直接に起動される、ことを特徴とする、請求項11、又は13から18のいずれかに記載の方法。
【請求項20】
分注ロボット(5)が少なくとも一つの選択されたピペット(6)を用いて特定位置(12、12’、12”)で選択された特定動作(13)を実施するとすぐ、ユーザーは、ドウェル時間又は作動時間を活性化し経過させることを特徴とする、請求項11から19のいずれかに記載の方法。
【請求項1】
コンピュータ制御の液体処理ワークステーション(2)用のインタフェース(1)であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続可能あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択、をアイコン(35)の形で可視化することを少なくとも実行し、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納可能であり、インタフェース・ソフトウェア(18)を用いてそこから検索可能であり、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)をアイコン(35)として可視化することを実行し、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を位置決めするために、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を移動することを実行する、
ことを特徴とするインタフェース。
【請求項2】
コンピュータ制御の液体処理ワークステーション(2)用のインタフェース(1)であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続可能あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することを少なくとも実行し、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納可能であり、インタフェース・ソフトウェア(18)を用いてそこから検索可能であり、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することを実行し、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置を指定した直後で、選択された特定動作を実行する前に、特定の容器の指定された分注位置に選択されたピペットを事実上位置決めするために、コンピュータ制御の液体処理ワークステーションの分注ロボットを、2次元又は3次元シミュレーションにおいて可視化することを実行する、
ことを特徴とするインタフェース。
【請求項3】
可視化手段(17)は、グラフィック・ユーザー・インタフェース(GUI)、画像投影装置、又は表示スクリーン(20)であることを特徴とする、請求項1又は2に記載のインタフェース。
【請求項4】
入力手段(16)は、コンピューター・マウス(21)、タッチパッド(22)、グラフィック・タブレット、ジョイスティック、及びセンサ・表示スクリーン(23)を備えた群から選択されることを特徴とする、請求項1から3のいずれかに記載のインタフェース。
【請求項5】
入力手段(16)は、利用可能なピペット(6)、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)、及びピペット(6)を用いて実行可能な特定動作(13)の選択が触れること又はクリックすることにより選択可能であるセンサ・表示スクリーン(23)であることを特徴とする、請求項1から4のいずれかに記載のインタフェース。
【請求項6】
少なくとも一つの容器(4)は、少なくとも一つのトラフ(24)、複数のウェル(26)を有する少なくとも一つのマイクロプレート(25)、及び少なくとも一つの試料チューブ(27)あるいはこれらのいずれかの組み合わせを備えた一群の容器から選択されることを特徴とする、請求項1から5のいずれかに記載のインタフェース。
【請求項7】
液体試料(7)の体積(15)を増加又は減少するための少なくとも一つの仮想スイッチ(28、28’)は、可視化手段(17)を用いて可視化可能であり、現在選択された体積(15)は、ボリューム表示装置(29)において目に見えることを特徴とする、請求項1から6のいずれかに記載のインタフェース。
【請求項8】
少なくとも一つの状態表示(30)は、ドウェル時間又は作動時間の経過、及び実施された特定動作(13)の質を表示する可視化手段(17)を用いて可視化可能であることを特徴とする、請求項1から7のいずれかに記載のインタフェース。
【請求項9】
各ピペット(6)は、個々のライン(8)を介して動作可能なポンプ(9)に流体的に接続されることを特徴とする、請求項1から8のいずれかに記載のインタフェース。
【請求項10】
特定動作(13)は、ピペット先端(14)の受入れ、フラッシング及び廃棄と、液体試料(7)の体積(15)の吸引、混合、及び分配を備えた一群の動作から選択可能であることを特徴とする、請求項1から9のいずれかに記載のインタフェース。
【請求項11】
インタフェース(1)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御用の方法であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することに使用され、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納され、インタフェース・ソフトウェア(18)を用いてそこから検索され、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することに使用され、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を位置決めするために、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を移動することに使用される、
ことを特徴とする方法。
【請求項12】
インタフェース(1)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御用の方法であって、ワークステーション(2)は、
(a) 容器(4)配置用の本質的に水平に配向された作業面(3)と、
(b) 液体試料(7)を吸引及び分配する少なくとも一つのピペット(6)を有する電動式分注ロボット(5)と、
(c) 制御コンピュータ(10)であって、分注ロボット(5)が電気的に接続され、この制御コンピュータ(10)において起動された少なくとも制御プログラム(11)部分が分注ロボット(5)に対して、作業面(3)の特定位置(12, 12’, 12”)に少なくとも一つのピペット(6)を位置決めすることを可能にし、かつ少なくとも一つのピペット(6)を用いてそこで特定動作(13)を実行可能にする制御コンピュータ(10)と、を備え、
インタフェース(1)は、制御コンピュータ(10)に接続あるいはその中に統合され、かつ入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)及び電子メモリ(19)を備え、可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)に容器(4)が置かれた位置(12)を、及び少なくとも一つのピペット(6)を用いて実行可能な特定動作(13)の選択を、アイコン(35)の形で可視化することに使用され、ここで、それらのピペット(6)及び位置(12)に関する情報は、電子メモリ(19)に格納され、インタフェース・ソフトウェア(18)を用いてそこから検索され、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)での少なくとも一つの指定された分注位置(12, 12’, 12”)を、アイコン(35)として可視化することに使用され、かつ、
上記インタフェース(1)及び上記インタフェース・ソフトウェア(18)は、特定位置(12, 12’, 12”)を指定した直後で、選択された特定動作(13)を実行する前に、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を、2次元又は3次元シミュレーションにおいて可視化することに、及び特定の容器(4)の指定された分注位置(12, 12’, 12”)に選択されたピペット(6)を事実上位置決めすることに、使用される、
ことを特徴とする方法。
【請求項13】
ユーザーは、液体処理ロボット(5)が有効に所望位置(12、12’、12”)に移動したか否かを光学的に制御することを特徴とする、請求項11に記載の方法。
【請求項14】
利用可能なピペット(6)、及び液体処理ワークステーション(2)の作業面(3)での容器(4)の位置(12)に関する情報は、ユーザーによって視覚的に得られ、電子メモリ(19)に手動で格納されることを特徴とする、請求項11又は13に記載の方法。
【請求項15】
利用可能なピペット(6)、及び液体処理ワークステーション(2)の作業面(3)での容器(4)の位置(12)に関する情報は、制御コンピュータ(10)によって自動的に認識され、インタフェース(1)の電子メモリ(19)に格納されることを特徴とする、請求項11から13のいずれかに記載の方法。
【請求項16】
特定動作(13)の実行されたシーケンスは、電子メモリ(19)に格納され、後に、特定動作(13)の同一のシーケンスとしてこのメモリ(19)から検索され自動的に実行されることを特徴とする、請求項11から15のいずれかに記載の方法。
【請求項17】
直接に選択されたあるいは以前に格納された特定動作(13)を、又は特定動作(13)のシーケンスを実行している間、既存のエラーを改善するために、双方向の介在がそれらの動作の一つにおいて行われることを特徴とする、請求項11から16のいずれかに記載の方法。
【請求項18】
特定動作(13)は、ピペット先端(14)の受入れ、フラッシング及び廃棄と、液体試料(7)の体積(15)の吸引、混合、及び分配とを備えた一群の動作から選択されることを特徴とする、請求項11から17のいずれかに記載の方法。
【請求項19】
少なくとも一つの利用可能なピペット(6)及び少なくとも一つの特定動作(13)及び特定の容器(4)の特定位置(12、12’、12”)は、入力手段(16)を用いて選択され、この入力手段は、分注ロボット(5)が少なくとも一つの選択されたピペット(6)を選択された位置(12、12’、12”)に直接に位置決めするように、制御プログラム(11)がインタフェース・ソフトウェア(18)を介して直接に起動される、ことを特徴とする、請求項11、又は13から18のいずれかに記載の方法。
【請求項20】
分注ロボット(5)が少なくとも一つの選択されたピペット(6)を用いて特定位置(12、12’、12”)で選択された特定動作(13)を実施するとすぐ、ユーザーは、ドウェル時間又は作動時間を活性化し経過させることを特徴とする、請求項11から19のいずれかに記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2011−519029(P2011−519029A)
【公表日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2011−505527(P2011−505527)
【出願日】平成21年4月24日(2009.4.24)
【国際出願番号】PCT/EP2009/054988
【国際公開番号】WO2009/130318
【国際公開日】平成21年10月29日(2009.10.29)
【出願人】(501442699)テカン・トレーディング・アクチェンゲゼルシャフト (26)
【氏名又は名称原語表記】TECAN Trading AG
【Fターム(参考)】
【公表日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年4月24日(2009.4.24)
【国際出願番号】PCT/EP2009/054988
【国際公開番号】WO2009/130318
【国際公開日】平成21年10月29日(2009.10.29)
【出願人】(501442699)テカン・トレーディング・アクチェンゲゼルシャフト (26)
【氏名又は名称原語表記】TECAN Trading AG
【Fターム(参考)】
[ Back to top ]