
コンピュータ断層撮影装置
【課題】アーチファクトを減少させた断面像を撮影するTR方式のコンピュータ断層撮影装置を提供する。
【解決手段】放射線源10と、被検体を透過した放射線を検出する放射線検出器11と、放射線のファン面に沿って、放射線と交差する方向に複数回の直線移動するように放射線源及び被検体21を相対的に制御するとともに、各直線移動と次の直線移動との間に、回転の停止位置が互いに180°を成す位置からずれるように予め設定して同一方向にステップ回転するように放射線源10及び被検体21を相対的に制御する機構部12と、それぞれの直線移動の移動中に放射線を検出した放射線検出器11が出力する被検体21の透過データを入力し、該透過データから被検体の断面像を生成するデータ処理部15とを有する。
【解決手段】放射線源10と、被検体を透過した放射線を検出する放射線検出器11と、放射線のファン面に沿って、放射線と交差する方向に複数回の直線移動するように放射線源及び被検体21を相対的に制御するとともに、各直線移動と次の直線移動との間に、回転の停止位置が互いに180°を成す位置からずれるように予め設定して同一方向にステップ回転するように放射線源10及び被検体21を相対的に制御する機構部12と、それぞれの直線移動の移動中に放射線を検出した放射線検出器11が出力する被検体21の透過データを入力し、該透過データから被検体の断面像を生成するデータ処理部15とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トランスレートと回転を組み合わせるTR方式のコンピュータ断層撮影装置に関する。
【背景技術】
【0002】
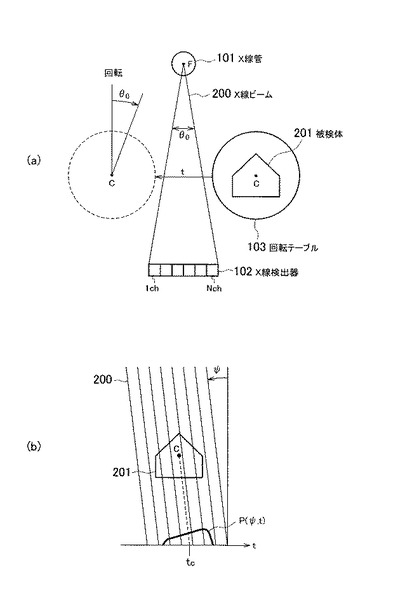
コンピュータ断層撮影装置(以下、適宜「CT」という)の一種として、TR(トランスレート・ローテート)方式のCTがよく知られている(例えば、非特許文献1参照)。TR方式のCTは、図8(a)に示すように、X線管101の放射線発生源Fから放射されてコリメータ(図示せず)でファン状に形成されたX線ビームの内のファン角(放射角)θ0分であるX線ビーム200を1ch〜NchのN個のチャンネルを有するX線検出器102で検出する。X検出器102の各チャンネルで検出されたX線ビーム200は透過データI(n)として出力されると、接続されるコンピュータ(図示せず)で処理されて断層像が形成される。
【0003】
図8(a)に示すCTでは、t移動機構(図示せず)が、被検体201が載置される回転テーブル103をt方向に移動させる(往路のトランスレート)。CTでは、この往路のトランスレート中に移動位置tの一定ピッチごとに各チャンネルnで透過データIn(t)を形成するX線ビームを検出する。往路のトランスレートが終了した時点では、回転テーブル103は、図8(a)に示す点線の位置にある。
【0004】
続いて、図8(a)に示すCTでは、回転機構(図示せず)が、回転中心Cを回転軸として、回転テーブル103をファン角θ0の回転角で回転させる。このように回転テーブル103が回転されることで、回転テーブル103に載置される被検体201がステップ回転される。
【0005】
その後、図8(a)に示すCTでは、t移動機構(図示せず)が、被検体201が載置される回転テーブル103をt方向の逆向きに移動させる(復路のトランスレート)。CTでは、この復路のトランスレート中に移動位置tの一定ピッチごとに各チャンネルnで被検体201の透過データIn(t)を形成するX線ビーム200を検出する。透過データIn(t)は、各チャンネルnそれぞれで検出された平行透過データである。
【0006】
このように、図8(a)に示すCTでは、往路のトランスレート、一定の向きのステップ回転及び復路のトランスレートを繰り返しながら、トランスレート番号をkとして、透過データIk,n(t)を取得することで、被検体201を基準にしたときのX線パスの方位(以下、「被検体基準の方位」という)ψ(k,n)に対し180°分の平行透過データIψ(t)をθ0/Nの角度ピッチで得ている。また、CTでは、K回(Kは、2以上の自然数)のトランスレートで得た平行透過データIψ(t)を用いて、フィルタ補正逆投影法等で被検体201の断層像を再構成している。ここで、ファン角θ0は、180°/Kにより求められる。
【0007】
従来のTR方式のCTにおける断面像の再構成では、図8(b)に示すように、まず、平行透過データIψ(t)を対数変換して平行透過データPψ(t)とし、平行透過データPψ(t)について方位ψごとにt方向に高域強調フィルタ掛けし、X線ビーム200(ψ方向)に沿って仮想格子点に逆投影して断面像を得ている。ここで、断面像を得るためには、平行透過データPψ(t)上の回転中心投影位置tcが回転中心Cに合うように逆投影する必要がある。
【0008】
TR方式のCTでは、逆投影の際、回転中心投影位置tcが一致しないと断層像にファン角θ0ごとの放射状アーチファクトが発生する。したがって、TR方式のCTは、断面像にアーチファクトが発生するのを防ぐため、回転中心投影位置tcが一致するようにトランスレート(t移動)の幾何位置を正確に設定しておくが、実際は誤差が生じ、多少の放射状アーチファクトが残存する場合が多い。これに対し、従来、K回のトランスレートよりなるスキャンを偶数回行って(多重スキャン)、各スキャンで得られる断面像を加算することで、このファン角θ0ごとの残存する放射状アーチファクトを打ち消しあわせ、良好な断面像を得る方法を利用するCTもあった(例えば、特許文献1参照)。
【特許文献1】特開平11−108857号公報
【非特許文献1】岩井喜典著「CTスキャナ」コロナ社、1979年2月20日初版、p.15−17
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載されるような従来のCTにおける多重スキャンでは、断面像に、ファン角θ0よりも細かな角度ピッチの放射状アーチファクトが残存することがあるという問題がある。従来のCTでアーチファクトが残存するのは、X線検出器102のチャンネル数Nが不足し、平行透過データの角度ピッチ(θ0/N)が大きいことによる。したがって、ハイカットフィルタで画像を平滑化するか、チャンネル数を増やすことで、断面像に残存するアーチファクトを防ぐことができる。
【0010】
一方、画像を平滑化すると分解能が低下するという問題が生じる。また、チャンネル数を増やした場合、検出器及びデータ収集システムが複雑になるほか、チャンネルピッチが小さくなることによって、例えば、チャンネル間に設置されている散乱線コリメータの長さや厚みや精度を確保することが困難になり、散乱線の影響が問題になる。
【0011】
そこで、本発明は、上記課題に鑑み、TR方式CTの断面像のアーチファクトを減少させて画質を向上させることを目的とする。
【課題を解決するための手段】
【0012】
上記の課題を達成するため、請求項1記載の発明は、2以上の自然数Kに対し、180°/Kの角度をθ0として、撮影面に沿ってθ0を覆うファン形状の放射線を放射する放射線源と、前記撮影面に沿って少なくともθ0の範囲の被検体を透過した前記放射線を検出する検出チャンネルを複数有する放射線検出器と、前記被検体が前記撮影面に沿って前記放射線と交差する方向に複数回の直線移動をするように前記放射線源及び前記被検体を相対的に制御するとともに、前記撮影面に垂直な回転軸を中心としてステップ回転するように前記放射線源及び前記被検体の位置関係を相対的に制御する機構部と、前記機構部に、前記直線移動をさせるとともに、各前記直線移動と次の前記直線移動との間に、同一向きに前記ステップ回転をさせて、2×K回の前記直線移動をさせる機構制御部であり、前記ステップ回転の複数の停止位置が互いに180°を成す位置にならないよう予めずらして設定してステップ回転させる機構制御部と、それぞれの前記直線移動の移動中に前記放射線を検出した前記放射線検出器が出力する前記被検体の透過データを入力し、該透過データから前記被検体の断面像を生成するデータ処理部とを有することを要旨とする。
【0013】
上記構成の本発明によれば、データ処理部は、被検体基準の方位ψの360°に亘る透過データから被検体の断面像を得るので、180°分の透過データとこれと逆向きの180°分の透過データが、互いに、ファン角θ0ごとに断面像に残存する放射状アーチファクトを打ち消し合わせ、アーチファクトの少ない断面像を得ることができる。また、180°分の被検体基準の方位ψとこれと逆向きの180°分の被検体基準の方位ψが、互いに重ならないようずれているので、透過データの方位ψの角度ピッチが補完されて断面像が再構成されるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0014】
請求項2記載の発明は、請求項1記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、前記ステップ回転の複数の停止位置を互いに180°を成す位置からΔθ/2ずらすようにステップ回転させることを要旨とする。
【0015】
上記構成の本発明によれば、透過データの方位ψの角度ピッチがΔθ/2の間隔で補完されて断面像が再構成されるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0016】
請求項3記載の発明は、請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0+Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを要旨とする。
【0017】
上記構成の本発明によれば、放射線パスの被検体基準の方位ψが360°に亘るようにでき、かつ、ステップ回転の停止位置を互いに180°を成す位置からΔθ/2ずらすことができる。
【0018】
請求項4記載の発明は、請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0−Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを要旨とする。
【0019】
上記構成の本発明によれば、放射線パスの被検体基準の方位ψが360°に亘るようにでき、かつ、ステップ回転の停止位置を互いに180°を成す位置からΔθ/2ずらすことができる。
【0020】
請求項5記載の発明は、請求項1乃至4記載のいずれかのコンピュータ断層撮影装置において、前記データ処理部は、それぞれの前記直線移動の移動中に取得した前記透過データを前記検出チャンネル毎に該検出チャンネルが検出する放射線パスの前記被検体を基準とする方位ψで360°に亘って逆投影して被検体の断面像を生成することを要旨とする。
【0021】
上記構成の本発明によれば、フィルタ補正逆投影法で360°に亘って連続して逆投影して断面像が得られる。
【0022】
請求項6記載の発明は、請求項1乃至5記載のいずれかのコンピュータ断層撮影装置において、前記放射線検出器は、前記検出チャンネルを前記撮影面に平行な方向及び前記撮影面に直交する方向に複数列有することを要旨とする。
【0023】
上記構成の本発明によれば、ステップ回転を挟んだ2×K回の移動、すなわち、1回のスキャンで複数の断面像を得ることができる。
【発明の効果】
【0024】
TR方式のCTの断面像の画質を向上させることができる。
【発明を実施するための最良の形態】
【0025】
[第1の実施の形態]
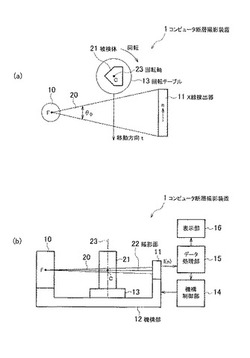
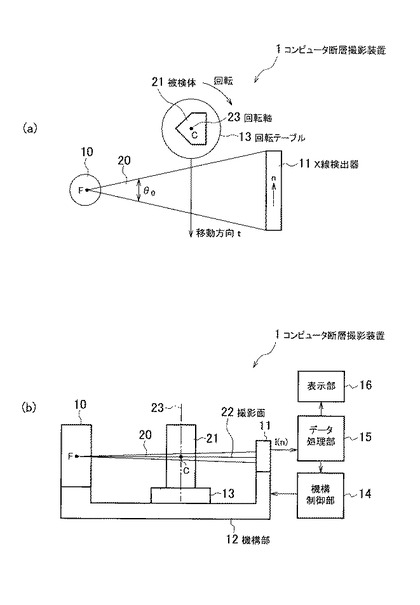
図1(a)は、本発明の第1の実施形態に係るコンピュータ断層撮影装置(CT)1の構成を上部から観察した平面図であって、図1(b)は、コンピュータ断層撮影装置1の構成を水平方向から観察した正面図である。
【0026】
コンピュータ断層撮影装置1は、図1に示すように、断面像を得る面として設定した水平な面である撮影面22に沿って、X線ビーム20を放射するX線管10と、撮影面22に沿って複数の検出チャンネルを有して各チャンネルで被検体21を透過したX線ビーム20を検出するX線検出器11とを有している。X線検出器11は、例えば、半導体光センサ及びシンチレータが組み合わせられており、放射線発生源Fから放射線が発生される。図1では、検出チャネルの数をNとし、X線検出器11の各チャンネルにおいてX線ビーム20を検出し、それぞれ透過データI(n)を出力するものとして説明する。
【0027】
X線管10とX線検出器11は、図1(b)に示すように、対向して機構部12によって支持されている。X線管10のX線ビーム20の焦点Fから発生したX線ビーム20は、コリメータ(図示せず)により、180°/K(Kは、2以上の自然数)で求められる角度θ0をファン角として、少なくともθ0を覆う角度のファン形状に成形され、図1(a)に示すように、X線検出器11に入射する。上述したように、Kに対し、θ0=180°/Kであるので、K=6とすると、ファン角θ0は30°である。X線検出器11は、撮影面22に沿って少なくともθ0を覆う角度範囲のX線ビーム20を検出し、この内θ0分の検出した透過データを使用する。以下θ0分のみを検出するものとして記載する。
【0028】
また、コンピュータ断層撮影装置1は、図1(b)に示すように、被検体21が載置される回転テーブル13を制御する機構部12を有している。具体的には、機構部12は、被検体21が撮影面22に沿ってX線ビーム20と交差する方向tに往路と復路を合わせてK×2回の往復の直線移動(以下、「トランスレート」又は「t移動」とする)をするように被検体21が載置される回転テーブル13の移動を制御する。また、機構部12は、各直線移動と次の直線移動との間に、撮影面22に垂直な回転中心Cを通る回転軸23を中心として同一向きに所定の角度のステップ回転をするように回転テーブル13の回転を制御する。
【0029】
所定の角度とは、ステップ回転の複数の停止位置(の任意の2つが)が互いに180°を成す位置にならないよう予めずらして設定することで、各検出チャンネルが検出する放射線パスの被検体を基準とする方位ψが180°を成す位置での逆向きの放射線パスの方位と重ならないようにステップ回転を行うステップ回転角度である。また、所定の角度とは、ステップ回転の複数の停止位置が検出チャンネルが検出する放射線パスの被検体を基準とする方位ψが抜けなく360°に亘るよう予め設定したステップ回転角度である。
【0030】
さらに、機構部12は、外部から入力する制御信号に従って、回転テーブル13を昇降させることで、回転テーブル13に載置される被検体21の撮影部位を撮影面22に合わせるように制御する。
【0031】
機構部12によって制御されるt移動及びステップ回転のシークエンスは、図1(b)に示す機構制御部14で記憶している。機構制御部14は、操作者によって断層撮影を開始するリクエストが入力されたデータ処理部15から開始指令を入力し、記憶されるシーケンスに従ってTRスキャンの処理を実行する制御信号を機構部12に出力する。また、操作者によって回転テーブル13の昇降を制御するリクエストを入力すると、回転テーブル13を昇降する制御信号を機構部12に出力する。
【0032】
図1(b)に示すように、コンピュータ断層撮影装置1は、データ処理部15を有し、2×K回の移動の移動中にそれぞれ多数の移動位置でX線検出器11が検出したX線ビーム20が変換された透過データI(n)を入力し、被検体21の撮影面22における断面像を再構成する。このデータ処理部15は、中央処理装置、記憶装置及びメモリ等を備える一般的なコンピュータで、断面像を再構成するソフトウェア等を記憶している。データ処理部15は、従来から一般的に用いられている「フィルタ補正逆投影法」を利用して、X線検出器11で検出した透過データから断面像を再構成する。また、データ処理部15は、操作者によって種々の操作するリクエストが入力される入力部を有している。
【0033】
コンピュータ断層撮影装置1の構成要素として、他に、データ処理部15に接続され、断層像等を表示する表示部16、X線管10を制御するX線制御部、X線が外部に漏れるのを防ぐX線遮蔽箱等がある(図示せず)。
【0034】
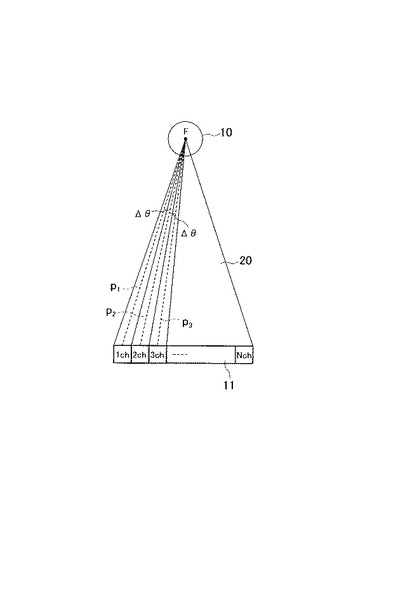
次に、図2を用いてX線ビーム20とX線検出器11の各チャンネルの関係について、説明する。図2及び以下の説明では、隣接する検出チャンネルそれぞれが検出するX線パス間の角度をΔθとする。ここで、隣接する各X線パスから成る角度Δθは略一定であるが、厳密には同一角度ではない。たとえば、X線検出器11が複数の検出器ユニットより成るユニット構造である場合、ユニットである各検出器の継ぎ目で不均質となる。また、検出チャンネルを直線的で等間隔の配置とすると、中央の2本のX線パスpから成る角度Δθと比べて端に存在する2本のX線パスから成る角度Δθが小さくなる。以下で説明する本発明の実施の形態において、Δθには、各隣接X線パス間の角度の平均の値を用いる。具体的には、X線検出器11がNチャンネル(1,2,…,N)あるとしたとき、ファン角θ0に対し、X線パス間の角度をΔθ=θ0/Nとする。したがって、放射線パスp1及びp2の成す角度は概略Δθであり、放射線パスp2及びp3の成す角度も概略Δθである。また、他の任意の隣接する放射線パスの成す角度も概略Δθである。
【0035】
《コンピュータ断層撮影装置におけるTRスキャンの処理》
コンピュータ断層撮影装置1では、被検体21が載置された回転テーブル13が昇降されて被検体21の撮影部位が回転中心Cに合わせられた後に、操作者によって入力されたTRスキャンの開始操作指令に従ってTRスキャンを開始する。データ処理部15は、操作者によって開始操作指令が入力されると、機構制御部14にスキャン開始指令を出力する。これにより、機構制御部14は、予め記憶されているシークエンスに従って、機構部12にTRスキャンを制御する制御信号を出力する。このとき機構制御部14は、機構部12に、θ0のステップ回転を挟んでK回のt移動を実行させ、次にθ0+Δθ/2(またはθ0−Δθ/2)のステップ回転を実行させ、その後にθ0のステップ回転を挟んでK回のt移動を実行させるように制御信号を出力する。
【0036】
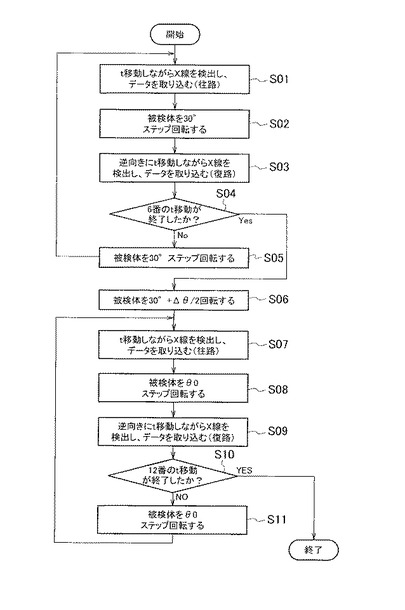
図3及び表1を参照して、コンピュータ断層撮影装置1においてTRスキャンを実行する処理について具体的に説明する。図3及び表1では、K=6、θ0=30°である場合について説明する。以下で説明する一連の処理が1回のTRスキャンであって、機構制御部14に記憶されるシークエンスによって実行される。
【表1】

【0037】
コンピュータ断層撮影装置1においてTRスキャンが開始されると、機構部12は、回転テーブル13をt移動させることで被検体21をX線ビーム20を横切るようにt移動(往路)させる(S01)。X線検出器11は、t移動の移動中に一定移動間隔(一定ピッチ)の多数の位置のそれぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0038】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13を30°ステップ回転させる(S02)。
【0039】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS01とは逆向きに移動させることで、被検体21をX線ビーム20を横切るようにt移動(復路)させる(S03)。X線検出器11は、t移動の移動中に一定移動間隔(一定ピッチ)の多数の位置それぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0040】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S05)。
【0041】
t移動番号6のt移動が終了するまで上述したステップS01〜S05の処理を繰り返し、t移動番号6のt移動が終了すると(S04でYES)、機構部12は、被検体21の載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°+Δθ/2ステップ回転させる(S06)。
【0042】
続いて、機構部12は、回転テーブル13をステップS01と同一方向に移動させることで、被検体21をX線ビーム20を横切るようにt移動(往路)させる(S07)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0043】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S08)。
【0044】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS07とは逆の向きに移動させることで被検体21をX線ビーム20を横切るようにt移動(復路)させる(S09)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0045】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S11)。その後、t移動番号12のt移動が終了するまでステップS07〜S11の処理を繰り返し、t移動番号12のt移動が終了すると(S10でYES)、機構部12はTRスキャンを終了する。
【0046】
表1に示すように、例えばt移動番号1のt移動が終わった時点では、初期位置からの回転角度φ(ステップ回転の積算)は、0°であり、t移動番号2のt移動が開始される前に30°ステップ回転されて回転角度が30°となる。また、t移動番号6のt移動が終わった時点では、回転角度は150°であり、t移動番号7のt移動が開始される前に30°+Δθ/2ステップ回転されて回転角度が180°+Δθ/2となる。さらに、t移動番号12のt移動が終わった時点では、回転角度は330°+Δθ/2となる。
【0047】
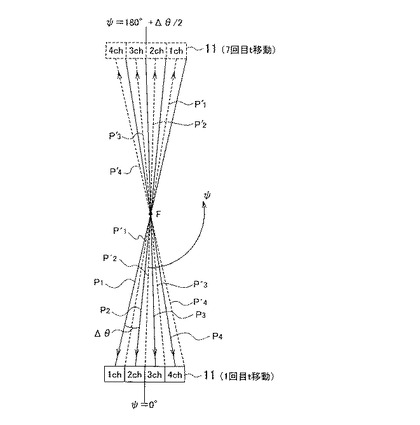
図4に、図3及び表1を用いて説明したTRスキャンがされた場合のステップ回転の互いに対向停止位置にあるt移動番号1(φ=0°)とt移動番号7(φ=180°+Δθ/2)についての被検体基準で表したX線パスpの方位ψの関係を示している。X線パスの被検体基準の方位ψは、t移動番号kでの回転角度φ(k)とチャンネルnが検出するX線パスpの撮影面22に沿ったX線検出器11の中央から測った角度であるセット角度θ(n)の和として、式(1)で表される。
【0048】
ψ(k,n)=φ(k)+θ(n) ・・・(1)
対向停止位置とは、回転角度φのある停止位置に対し、概略180°を成す停止位置のことをいう。
【0049】
X線検出器11の検出チャンネル数は、実際は100チャンネル以上であるが、図4において、便宜的に4チャンネル(1ch〜4ch)としている。図4に示す通り、t移動番号1及び7の回転位置は互いに180°からΔθ/2ずれ、検出するX線パスの角度ピッチを互いに補完する関係である。例えば、図4に示す例において、対向するX線パスp1及びp1’、X線パスp2及びp2’、X線パスp3及びp3’、X線パスp4及びp4’はそれぞれ互いに逆向きで方向はΔθ/2ずれている。また、図4に示していない他の互いに対向停止位置にある回転位置の組すべてについても表1で示すように、回転位置は、互いに180°からΔθ/2ずれている。これにより、逆向きパスで補完することで、360°に亘ってΔθ/2の間隔でX線パスができている。したがって、図3を用いて上述したt移動及びステップ回転を繰り返すTRスキャンにより、ψが360°に亘るよう、かつ、逆向きパスで互いに角度ピッチを補完するX線パスを成す透過データを取り込むことができる。
【0050】
t移動番号がk、X線検出器のチャンネル数がn、t移動位置がtであるとき、データ処理部15は、2×K回のt移動でそれぞれ取得した(ψ(k,n)で360°に亘る)透過データI(ψ,t)をフィルタ補正逆投影法により、検出チャンネル毎に該検出チャンネルが規定するX線パスの被検体基準の方位ψ(k,n)で360°に亘って逆投影して被検体の断面像を得る。
【0051】
上述した第1の実施形態に係るCT1によれば、透過データI(ψ,t)の方位ψの角度ピッチΔθ(Δθ=θ0/N)が補完され、Δθ/2の間隔で逆投影がなされるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0052】
また、上述した第1の実施形態に係るCT1によれば、逆投影するとき、検出チャンネルの不均質配置を考慮して式(1)で計算したψ(k,n)を用いることで、逆投影を正確にでき、残存する細かな角度ピッチの放射状アーチファクトをさらに低減した断面像を得ることができる。
【0053】
さらに、上述した第1の実施形態に係るCT1によれば、0°〜360°の透過データを逆投影することで、180°分の逆投影とこれと逆向きの180°分の逆投影とにより、ファン角θ0ごとに残像する放射状アーチファクトを打ち消し合わせることができ、良好な断面像を得ることができる。上述した特許文献1には、ステップ回転を挟んだK回のトランスレートよりなるスキャンを、同じ方向にステップ回転続けながら、2回行って(2重スキャン)、各スキャンで得られる断面像を互いに180°回転させて加算することで、このファン角θ0ごとの残存する放射状アーチファクトを打ち消し合わせる方法が記載されている。特許文献1で、180°回転させて加算する理由は、各スキャンで完全に同じ逆投影を行っているためである。すなわち、1回目のスキャンで0°〜180°の透過データを0°〜180°で逆投影して断面像を作り、2回目のスキャンで180°〜360°の透過データを0°〜180°で逆投影して断面像を作っている。ここで、2回目のスキャンで180°〜360°で逆投影すれば、断面像は逆にならず、2つの断面像をそのまま加算すれば、同じ断面像ができる。また、0°〜360°の透過データを連続して0°〜360°で逆投影しても同じ断面像ができる。
【0054】
なお、第1の実施形態では、図3のフローチャートのステップS06で、30°+Δθ/2回転しているが、Δθの符号を逆にして、30°−Δθ/2回転させても、方位ψについて360°に亘り、かつ、逆向きパスで互いに角度ピッチを補完するX線パスを成す透過データを取り込むことができ、同様の効果が得られることは容易に分かる。
【0055】
〈第2の実施形態〉
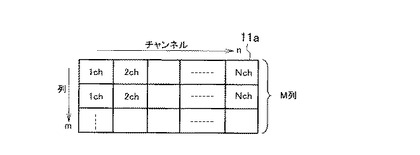
本発明の第2の実施形態に係るコンピュータ断層撮影装置は、本発明の第1の実施の形態に係るコンピュータ断層撮影装置1のX線検出器11に替えて、図5に示すX線検出器11aを有している。図5では、X線検出器11aをX線ビーム20が入射する側と逆の側からみた状態を表しているが、X線検出器11aは、撮影面22に平行するチャンネル方向及び撮影面22に直交する列方向に複数の検出チャンネルを有している。第2の実施形態に係るコンピュータ断層撮影装置の他の構成については、図1を用いて上述した第1の実施形態に係るコンピュータ断層撮影装置1と同一であるため、説明を省略する。
【0056】
また、第2の実施形態に係るコンピュータ断層撮影装置におけるTRスキャンの方法は、図2乃至図4を用いて上述した第1の実施形態に係るコンピュータ断層撮影装置1の場合と同様であるが、X線検出器11aが複数のチャンネル列を有しているので、第1の実施の形態に係るコンピュータ断層撮影装置と比較して、チャンネル列数分の透過データI(k,n,t)を得ることができる。そして、第2の実施形態に係るコンピュータ断層撮影装置は、I(k,n,t)それぞれについて第1の実施形態と同じ再構成を行う。したがって、第2の実施形態に係るコンピュータ断層撮影装置では、一回のTRスキャンで、チャンネル列の数分(枚数分)の断面像を得ることができる。
【0057】
しかしながら、列数が多くなった場合、上記の再構成では撮影面22からずれた列ほどX線パスの撮影面22からの傾斜が大きくなるため断面像が劣化する。この場合は公知のコーンビーム再構成方法を用いる。このコーンビーム再構成方法は、X線検出器11aの列番号をmとし、透過データをI(m,k,n,t)で表したとき、(m,t)面上の透過データI(m,t)を一組とし、方位ψ(k,n)は一定(平行)で、回転軸23方向は焦点に向けて傾斜させ、三次元仮想マトリクスに対し逆投影する。ここで、仮想マトリクスのピッチは任意に設定でき、回転軸とこれに直交する2軸で同じでも変えてもよい。また、マトリクスサイズも任意に設定でき、列数によらない任意枚数の複数の断面像が得られる。これは、例えば、特開2005−361747等に記載される周知の再構成方法で、ψ範囲を180°から360°に変更したものである。
【0058】
上述したように、列数Mが多い2次元の検出マトリクスを持つX線検出器11aを用いる場合、撮影面22からずれた位置での断面像の劣化を防ぐため、コーンビーム再構成を用いるのが好ましい。
【0059】
第2の実施形態に係るCTによれば、第1の実施形態に係るCTと同様に、透過データI(n)の方位ψの角度ピッチΔθ(=θ0/N)が補完され、Δθ/2の間隔で逆投影がなされるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。また、第2の実施形態に係るCTによれば、逆投影するとき、検出チャンネルの不均質配置を考慮して上述した式(1)で計算したψ(k,n)を用いることで、逆投影を正確にでき、残存する細かな角度ピッチの放射状アーチファクトをさらに低減した断面像を得ることができる。さらに、第2の実施形態に係るCTによれば、ファン角θ0ごとの残存する放射状アーチファクトを打ち消し合わせた断面像を得ることができる。また、第2の実施形態に係るCTによれば、1回のスキャンで複数枚の断面像を得ることができる。
【0060】
〈第1の変形例〉
続いて、第1及び第2の実施形態に係るコンピュータ断層撮影装置の第1の変形例について説明する。第1の変形例に係るコンピュータ断層撮影装置の構成は、図1を用いて上述したコンピュータ断層撮影装置1と同一であるが、図6及び表2を用いて第1の変形例に係る処理の流れを説明するように、機構制御部14で記憶しているシークエンスが異なる。
【表2】
【0061】
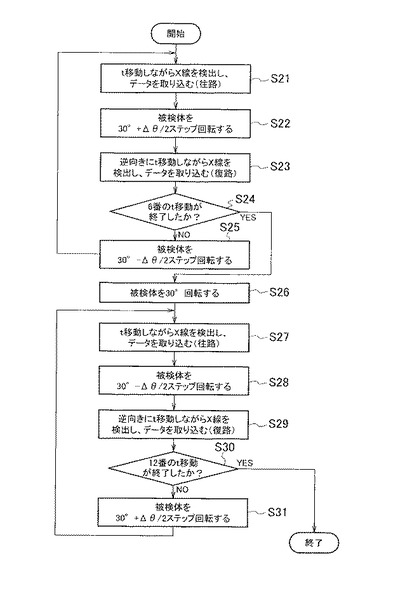
図6及び表2では、K=6、θ0=30°であるとして説明する。第1の変形例に係るコンピュータ断層撮影装置においてTRスキャンが開始されると、機構部12は、回転テーブル13を移動させることで被検体21をX線ビーム20を横切るようにt移動(往路)させる(S21)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置のそれぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0062】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13を30°+Δθ/2ステップ回転させる(S22)。
【0063】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS21とは逆向きに移動させることで、被検体21をX線ビーム20を横切るように逆向きにt移動(復路)させる(S23)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0064】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°−Δθ/2ステップ回転させる(S25)。
【0065】
t移動番号6のt移動が終了するまで上述したステップS21〜S25の処理を繰り返し、t移動番号6のt移動が終了すると(S24でYES)、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°ステップ回転させる(S26)。
【0066】
続いて、機構部12は、回転テーブル13をステップS21と同一方向に移動させることで、被検体21をX線ビーム20を横切るようにt移動(往路)させる(S27)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0067】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°−Δθ/2ステップ回転させる(S28)。
【0068】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS27とは逆の向きに移動させることで被検体21をX線ビーム20を横切るように逆向きにt移動(復路)させる(S29)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0069】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°+Δθ/2ステップ回転させる(S31)。その後、t移動番号12のt移動が終了するまでS27〜S31の処理を繰り返す。
【0070】
表2に示すように、例えばt移動番号1のt移動が終わった時点では、初期位置からの回転角度(ステップ回転の積算)は、0°であり、t移動番号2のt移動が開始される前に30°+Δθ/2ステップ回転されて回転角度が30°+Δθ/2となる。また、t移動番号6のt移動が終わった時点では、回転角度は150°+Δθ/2であり、t移動番号7のt移動が開始される前に30°ステップ回転されて回転角度が180°+Δθ/2となる。さらに、t移動番号12のt移動が終わった時点では、回転角度は330°となる。
【0071】
上述したように、機構制御部14は、機構部12に表2に示すようなステップ回転をさせるように制御すれば、ステップ回転の対向停止位置は180°からΔθ/2ずれ、X線パスの被検体基準の方位ψが360°に亘り、かつ、方位ψが逆向きパスで互いに重ならないようにすることができる。
【0072】
〈第2の変形例〉
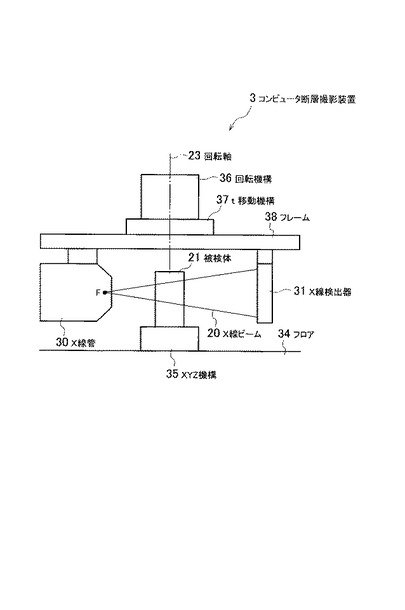
第2の変形例に係るコンピュータ断層撮影装置3は、図7に示すように、X線管30から照射され、被検体21を透過したX線ビーム20を2次元のチャンネルマトリックスを持つX線検出器31で検出して画像を構成する点では第2の実施形態と同一の構成であるが、t移動及び回転についての機構が異なる。すなわち、図1を用いて上述した第1及び第2の実施形態に係るコンピュータ断層撮影装置では、被検体21をトランスレート(t移動)及び回転させている。しかし、第2の変形例に係るコンピュータ断層撮影装置は、被検体21を固定し、X線管30とX線検出器31を一体でトランスレート(t移動)及び回転させるものである。このように移動制御することで、相対的には、X線管30及びX線検出器31と被検体21との関係は、上述したように被検体21を移動制御する場合と等価なものとなる。
【0073】
具体的には、第2の変形例に係るコンピュータ断層撮影装置3では、フロア34に支持されるXYZ機構35上に被検体21が載置されている。被検体21は、XYZ機構35により、X線ビーム20に対し、X,Y,Z方向の3方向に移動させることができるが、スキャンの際には移動された位置で固定されている。
【0074】
コンピュータ断層撮影装置3では、回転機構36がフロア34により支持され、回転機構36はt移動機構37を支持し、t移動機構37全体をt移動方向とともに回転させる。またt移動機構37はフレーム38を支持し、t移動機構37はフレーム38をt移動方向に移動させることができる。X線管30とX線検出器31は対向してフレーム38によって固定されている。コンピュータ断層撮影装置3において、t移動の方向は、図7に示す回転の位置においては紙面に垂直な方向であるが、回転に伴い、フレーム38とt移動機構37と共に回転する。
【0075】
その他、図示を省略するが、図7に示すコンピュータ断層撮影装置3においても、図1に示したコンピュータ断層撮影装置1と同一の構成を有している。そのため、コンピュータ断層撮影装置3においても、機構制御部に記憶されるシークエンスによってt移動機構37を制御してX線管30及びX線検出器31を固定するフレーム38をt移動するとともに回転機構36によって回転軸23を中心に回転させ、被検体21の断面像を撮影する。
【0076】
このように、図7に示すコンピュータ断層撮影装置3においても、相対的に等価なTRスキャンをすることができる。
【0077】
第2の変形例で上述したように、機構動作は相対的に等価であれば、他の機構方式に対しても同様である。
【0078】
〈他の変形例〉
上述した第1及び第2の実施形態では、X線ビーム20のファン角θ0の範囲を検出しているが、θ0を超えて検出するようにしてもよい。この場合、隣り合うt移動で重複した方位ψで透過データが取得されるが、例えば、特開2005−361741等に記載されるようにこの重複したψで透過データがウエイト付きで平均されるように再構成することができる。
【0079】
上述した第1及び第2の実施形態では、データ処理部15は、被検体基準の方位ψで360°に亘る透過データをψで360°に亘って逆投影して被検体の断面像を得ているが、透過データをψで複数に分割し、それぞれで逆投影して未完の断面像(部分画像)を再構成し、それぞれの部分画像を加算することで断面像を作成しても数学的に等価である。例えば、最初の180°と次の180°で部分画像を作成して加算し、平均するようにしてもよい。
【0080】
上述した第1の実施形態及び第1の変形例では、互いに対向停止位置にある2つの回転停止位置の組は、すべて、互いに180°からΔθ/2ずらしている。このずれは、Δθ/2には限られない。例えば、iを整数として、一般に±(Δθ/2+i・Δθ)だけずらしてもよい。さらに、iは各組ごとに異なる数であっても良い。ここで、ずらし量の絶対値がΔθ/2を超える場合においては、隣接するt移動がカバーする方位ψに抜けが生じないようにするため、θ0を超えて検出するようにする。そして、ψに抜けや重複が生じないように使用チャンネル範囲をt移動ごとに調整する。
【0081】
上述した第1及び第2の実施形態では、断層像を再構成する方法は、フィルタ補正逆投影法には限られず、フーリエ変換法やART(Algebraic Reconstruction Technique)のような公知のアルゴリズムを用いてもよい。
【0082】
上述した第1及び第2の実施形態では、放射線としてX線を用いて説明しているが、透過性の放射線であれば、γ線、中性子線、マイクロ波等他の放射線であっても同様である。また、被検体が透明物体である場合、可視光線であっても同様である。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施形態に係るコンピュータ断層撮影装置の概念図である。
【図2】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるX線パスの間隔について説明する図である。
【図3】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるTRスキャンの処理を説明するフローチャートである。
【図4】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるX線の対向パスについて説明する図である。
【図5】本発明の第2の実施形態に係るコンピュータ断層撮影装置のX線検出器を説明する図である。
【図6】本発明の第1の変形例に係るコンピュータ断層撮影装置におけるTRスキャンの処理を説明するフローチャートである。
【図7】本発明の第2の変形例に係るコンピュータ断層撮影装置の概念図である。
【図8】従来のコンピュータ断層撮影装置のTRスキャンを説明する図。
【符号の説明】
【0084】
1…コンピュータ断層撮影装置
10…X線管(放射線源)
11…X線検出器(放射線検出器)
12…機構部
13…回転テーブル
14…機構制御部
15…データ処理部
16…表示部
20…X線ビーム(放射線)
21…被検体
22…撮影面
23…回転軸
【技術分野】
【0001】
本発明は、トランスレートと回転を組み合わせるTR方式のコンピュータ断層撮影装置に関する。
【背景技術】
【0002】
コンピュータ断層撮影装置(以下、適宜「CT」という)の一種として、TR(トランスレート・ローテート)方式のCTがよく知られている(例えば、非特許文献1参照)。TR方式のCTは、図8(a)に示すように、X線管101の放射線発生源Fから放射されてコリメータ(図示せず)でファン状に形成されたX線ビームの内のファン角(放射角)θ0分であるX線ビーム200を1ch〜NchのN個のチャンネルを有するX線検出器102で検出する。X検出器102の各チャンネルで検出されたX線ビーム200は透過データI(n)として出力されると、接続されるコンピュータ(図示せず)で処理されて断層像が形成される。
【0003】
図8(a)に示すCTでは、t移動機構(図示せず)が、被検体201が載置される回転テーブル103をt方向に移動させる(往路のトランスレート)。CTでは、この往路のトランスレート中に移動位置tの一定ピッチごとに各チャンネルnで透過データIn(t)を形成するX線ビームを検出する。往路のトランスレートが終了した時点では、回転テーブル103は、図8(a)に示す点線の位置にある。
【0004】
続いて、図8(a)に示すCTでは、回転機構(図示せず)が、回転中心Cを回転軸として、回転テーブル103をファン角θ0の回転角で回転させる。このように回転テーブル103が回転されることで、回転テーブル103に載置される被検体201がステップ回転される。
【0005】
その後、図8(a)に示すCTでは、t移動機構(図示せず)が、被検体201が載置される回転テーブル103をt方向の逆向きに移動させる(復路のトランスレート)。CTでは、この復路のトランスレート中に移動位置tの一定ピッチごとに各チャンネルnで被検体201の透過データIn(t)を形成するX線ビーム200を検出する。透過データIn(t)は、各チャンネルnそれぞれで検出された平行透過データである。
【0006】
このように、図8(a)に示すCTでは、往路のトランスレート、一定の向きのステップ回転及び復路のトランスレートを繰り返しながら、トランスレート番号をkとして、透過データIk,n(t)を取得することで、被検体201を基準にしたときのX線パスの方位(以下、「被検体基準の方位」という)ψ(k,n)に対し180°分の平行透過データIψ(t)をθ0/Nの角度ピッチで得ている。また、CTでは、K回(Kは、2以上の自然数)のトランスレートで得た平行透過データIψ(t)を用いて、フィルタ補正逆投影法等で被検体201の断層像を再構成している。ここで、ファン角θ0は、180°/Kにより求められる。
【0007】
従来のTR方式のCTにおける断面像の再構成では、図8(b)に示すように、まず、平行透過データIψ(t)を対数変換して平行透過データPψ(t)とし、平行透過データPψ(t)について方位ψごとにt方向に高域強調フィルタ掛けし、X線ビーム200(ψ方向)に沿って仮想格子点に逆投影して断面像を得ている。ここで、断面像を得るためには、平行透過データPψ(t)上の回転中心投影位置tcが回転中心Cに合うように逆投影する必要がある。
【0008】
TR方式のCTでは、逆投影の際、回転中心投影位置tcが一致しないと断層像にファン角θ0ごとの放射状アーチファクトが発生する。したがって、TR方式のCTは、断面像にアーチファクトが発生するのを防ぐため、回転中心投影位置tcが一致するようにトランスレート(t移動)の幾何位置を正確に設定しておくが、実際は誤差が生じ、多少の放射状アーチファクトが残存する場合が多い。これに対し、従来、K回のトランスレートよりなるスキャンを偶数回行って(多重スキャン)、各スキャンで得られる断面像を加算することで、このファン角θ0ごとの残存する放射状アーチファクトを打ち消しあわせ、良好な断面像を得る方法を利用するCTもあった(例えば、特許文献1参照)。
【特許文献1】特開平11−108857号公報
【非特許文献1】岩井喜典著「CTスキャナ」コロナ社、1979年2月20日初版、p.15−17
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載されるような従来のCTにおける多重スキャンでは、断面像に、ファン角θ0よりも細かな角度ピッチの放射状アーチファクトが残存することがあるという問題がある。従来のCTでアーチファクトが残存するのは、X線検出器102のチャンネル数Nが不足し、平行透過データの角度ピッチ(θ0/N)が大きいことによる。したがって、ハイカットフィルタで画像を平滑化するか、チャンネル数を増やすことで、断面像に残存するアーチファクトを防ぐことができる。
【0010】
一方、画像を平滑化すると分解能が低下するという問題が生じる。また、チャンネル数を増やした場合、検出器及びデータ収集システムが複雑になるほか、チャンネルピッチが小さくなることによって、例えば、チャンネル間に設置されている散乱線コリメータの長さや厚みや精度を確保することが困難になり、散乱線の影響が問題になる。
【0011】
そこで、本発明は、上記課題に鑑み、TR方式CTの断面像のアーチファクトを減少させて画質を向上させることを目的とする。
【課題を解決するための手段】
【0012】
上記の課題を達成するため、請求項1記載の発明は、2以上の自然数Kに対し、180°/Kの角度をθ0として、撮影面に沿ってθ0を覆うファン形状の放射線を放射する放射線源と、前記撮影面に沿って少なくともθ0の範囲の被検体を透過した前記放射線を検出する検出チャンネルを複数有する放射線検出器と、前記被検体が前記撮影面に沿って前記放射線と交差する方向に複数回の直線移動をするように前記放射線源及び前記被検体を相対的に制御するとともに、前記撮影面に垂直な回転軸を中心としてステップ回転するように前記放射線源及び前記被検体の位置関係を相対的に制御する機構部と、前記機構部に、前記直線移動をさせるとともに、各前記直線移動と次の前記直線移動との間に、同一向きに前記ステップ回転をさせて、2×K回の前記直線移動をさせる機構制御部であり、前記ステップ回転の複数の停止位置が互いに180°を成す位置にならないよう予めずらして設定してステップ回転させる機構制御部と、それぞれの前記直線移動の移動中に前記放射線を検出した前記放射線検出器が出力する前記被検体の透過データを入力し、該透過データから前記被検体の断面像を生成するデータ処理部とを有することを要旨とする。
【0013】
上記構成の本発明によれば、データ処理部は、被検体基準の方位ψの360°に亘る透過データから被検体の断面像を得るので、180°分の透過データとこれと逆向きの180°分の透過データが、互いに、ファン角θ0ごとに断面像に残存する放射状アーチファクトを打ち消し合わせ、アーチファクトの少ない断面像を得ることができる。また、180°分の被検体基準の方位ψとこれと逆向きの180°分の被検体基準の方位ψが、互いに重ならないようずれているので、透過データの方位ψの角度ピッチが補完されて断面像が再構成されるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0014】
請求項2記載の発明は、請求項1記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、前記ステップ回転の複数の停止位置を互いに180°を成す位置からΔθ/2ずらすようにステップ回転させることを要旨とする。
【0015】
上記構成の本発明によれば、透過データの方位ψの角度ピッチがΔθ/2の間隔で補完されて断面像が再構成されるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0016】
請求項3記載の発明は、請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0+Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを要旨とする。
【0017】
上記構成の本発明によれば、放射線パスの被検体基準の方位ψが360°に亘るようにでき、かつ、ステップ回転の停止位置を互いに180°を成す位置からΔθ/2ずらすことができる。
【0018】
請求項4記載の発明は、請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0−Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを要旨とする。
【0019】
上記構成の本発明によれば、放射線パスの被検体基準の方位ψが360°に亘るようにでき、かつ、ステップ回転の停止位置を互いに180°を成す位置からΔθ/2ずらすことができる。
【0020】
請求項5記載の発明は、請求項1乃至4記載のいずれかのコンピュータ断層撮影装置において、前記データ処理部は、それぞれの前記直線移動の移動中に取得した前記透過データを前記検出チャンネル毎に該検出チャンネルが検出する放射線パスの前記被検体を基準とする方位ψで360°に亘って逆投影して被検体の断面像を生成することを要旨とする。
【0021】
上記構成の本発明によれば、フィルタ補正逆投影法で360°に亘って連続して逆投影して断面像が得られる。
【0022】
請求項6記載の発明は、請求項1乃至5記載のいずれかのコンピュータ断層撮影装置において、前記放射線検出器は、前記検出チャンネルを前記撮影面に平行な方向及び前記撮影面に直交する方向に複数列有することを要旨とする。
【0023】
上記構成の本発明によれば、ステップ回転を挟んだ2×K回の移動、すなわち、1回のスキャンで複数の断面像を得ることができる。
【発明の効果】
【0024】
TR方式のCTの断面像の画質を向上させることができる。
【発明を実施するための最良の形態】
【0025】
[第1の実施の形態]
図1(a)は、本発明の第1の実施形態に係るコンピュータ断層撮影装置(CT)1の構成を上部から観察した平面図であって、図1(b)は、コンピュータ断層撮影装置1の構成を水平方向から観察した正面図である。
【0026】
コンピュータ断層撮影装置1は、図1に示すように、断面像を得る面として設定した水平な面である撮影面22に沿って、X線ビーム20を放射するX線管10と、撮影面22に沿って複数の検出チャンネルを有して各チャンネルで被検体21を透過したX線ビーム20を検出するX線検出器11とを有している。X線検出器11は、例えば、半導体光センサ及びシンチレータが組み合わせられており、放射線発生源Fから放射線が発生される。図1では、検出チャネルの数をNとし、X線検出器11の各チャンネルにおいてX線ビーム20を検出し、それぞれ透過データI(n)を出力するものとして説明する。
【0027】
X線管10とX線検出器11は、図1(b)に示すように、対向して機構部12によって支持されている。X線管10のX線ビーム20の焦点Fから発生したX線ビーム20は、コリメータ(図示せず)により、180°/K(Kは、2以上の自然数)で求められる角度θ0をファン角として、少なくともθ0を覆う角度のファン形状に成形され、図1(a)に示すように、X線検出器11に入射する。上述したように、Kに対し、θ0=180°/Kであるので、K=6とすると、ファン角θ0は30°である。X線検出器11は、撮影面22に沿って少なくともθ0を覆う角度範囲のX線ビーム20を検出し、この内θ0分の検出した透過データを使用する。以下θ0分のみを検出するものとして記載する。
【0028】
また、コンピュータ断層撮影装置1は、図1(b)に示すように、被検体21が載置される回転テーブル13を制御する機構部12を有している。具体的には、機構部12は、被検体21が撮影面22に沿ってX線ビーム20と交差する方向tに往路と復路を合わせてK×2回の往復の直線移動(以下、「トランスレート」又は「t移動」とする)をするように被検体21が載置される回転テーブル13の移動を制御する。また、機構部12は、各直線移動と次の直線移動との間に、撮影面22に垂直な回転中心Cを通る回転軸23を中心として同一向きに所定の角度のステップ回転をするように回転テーブル13の回転を制御する。
【0029】
所定の角度とは、ステップ回転の複数の停止位置(の任意の2つが)が互いに180°を成す位置にならないよう予めずらして設定することで、各検出チャンネルが検出する放射線パスの被検体を基準とする方位ψが180°を成す位置での逆向きの放射線パスの方位と重ならないようにステップ回転を行うステップ回転角度である。また、所定の角度とは、ステップ回転の複数の停止位置が検出チャンネルが検出する放射線パスの被検体を基準とする方位ψが抜けなく360°に亘るよう予め設定したステップ回転角度である。
【0030】
さらに、機構部12は、外部から入力する制御信号に従って、回転テーブル13を昇降させることで、回転テーブル13に載置される被検体21の撮影部位を撮影面22に合わせるように制御する。
【0031】
機構部12によって制御されるt移動及びステップ回転のシークエンスは、図1(b)に示す機構制御部14で記憶している。機構制御部14は、操作者によって断層撮影を開始するリクエストが入力されたデータ処理部15から開始指令を入力し、記憶されるシーケンスに従ってTRスキャンの処理を実行する制御信号を機構部12に出力する。また、操作者によって回転テーブル13の昇降を制御するリクエストを入力すると、回転テーブル13を昇降する制御信号を機構部12に出力する。
【0032】
図1(b)に示すように、コンピュータ断層撮影装置1は、データ処理部15を有し、2×K回の移動の移動中にそれぞれ多数の移動位置でX線検出器11が検出したX線ビーム20が変換された透過データI(n)を入力し、被検体21の撮影面22における断面像を再構成する。このデータ処理部15は、中央処理装置、記憶装置及びメモリ等を備える一般的なコンピュータで、断面像を再構成するソフトウェア等を記憶している。データ処理部15は、従来から一般的に用いられている「フィルタ補正逆投影法」を利用して、X線検出器11で検出した透過データから断面像を再構成する。また、データ処理部15は、操作者によって種々の操作するリクエストが入力される入力部を有している。
【0033】
コンピュータ断層撮影装置1の構成要素として、他に、データ処理部15に接続され、断層像等を表示する表示部16、X線管10を制御するX線制御部、X線が外部に漏れるのを防ぐX線遮蔽箱等がある(図示せず)。
【0034】
次に、図2を用いてX線ビーム20とX線検出器11の各チャンネルの関係について、説明する。図2及び以下の説明では、隣接する検出チャンネルそれぞれが検出するX線パス間の角度をΔθとする。ここで、隣接する各X線パスから成る角度Δθは略一定であるが、厳密には同一角度ではない。たとえば、X線検出器11が複数の検出器ユニットより成るユニット構造である場合、ユニットである各検出器の継ぎ目で不均質となる。また、検出チャンネルを直線的で等間隔の配置とすると、中央の2本のX線パスpから成る角度Δθと比べて端に存在する2本のX線パスから成る角度Δθが小さくなる。以下で説明する本発明の実施の形態において、Δθには、各隣接X線パス間の角度の平均の値を用いる。具体的には、X線検出器11がNチャンネル(1,2,…,N)あるとしたとき、ファン角θ0に対し、X線パス間の角度をΔθ=θ0/Nとする。したがって、放射線パスp1及びp2の成す角度は概略Δθであり、放射線パスp2及びp3の成す角度も概略Δθである。また、他の任意の隣接する放射線パスの成す角度も概略Δθである。
【0035】
《コンピュータ断層撮影装置におけるTRスキャンの処理》
コンピュータ断層撮影装置1では、被検体21が載置された回転テーブル13が昇降されて被検体21の撮影部位が回転中心Cに合わせられた後に、操作者によって入力されたTRスキャンの開始操作指令に従ってTRスキャンを開始する。データ処理部15は、操作者によって開始操作指令が入力されると、機構制御部14にスキャン開始指令を出力する。これにより、機構制御部14は、予め記憶されているシークエンスに従って、機構部12にTRスキャンを制御する制御信号を出力する。このとき機構制御部14は、機構部12に、θ0のステップ回転を挟んでK回のt移動を実行させ、次にθ0+Δθ/2(またはθ0−Δθ/2)のステップ回転を実行させ、その後にθ0のステップ回転を挟んでK回のt移動を実行させるように制御信号を出力する。
【0036】
図3及び表1を参照して、コンピュータ断層撮影装置1においてTRスキャンを実行する処理について具体的に説明する。図3及び表1では、K=6、θ0=30°である場合について説明する。以下で説明する一連の処理が1回のTRスキャンであって、機構制御部14に記憶されるシークエンスによって実行される。
【表1】
【0037】
コンピュータ断層撮影装置1においてTRスキャンが開始されると、機構部12は、回転テーブル13をt移動させることで被検体21をX線ビーム20を横切るようにt移動(往路)させる(S01)。X線検出器11は、t移動の移動中に一定移動間隔(一定ピッチ)の多数の位置のそれぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0038】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13を30°ステップ回転させる(S02)。
【0039】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS01とは逆向きに移動させることで、被検体21をX線ビーム20を横切るようにt移動(復路)させる(S03)。X線検出器11は、t移動の移動中に一定移動間隔(一定ピッチ)の多数の位置それぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0040】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S05)。
【0041】
t移動番号6のt移動が終了するまで上述したステップS01〜S05の処理を繰り返し、t移動番号6のt移動が終了すると(S04でYES)、機構部12は、被検体21の載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°+Δθ/2ステップ回転させる(S06)。
【0042】
続いて、機構部12は、回転テーブル13をステップS01と同一方向に移動させることで、被検体21をX線ビーム20を横切るようにt移動(往路)させる(S07)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0043】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S08)。
【0044】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS07とは逆の向きに移動させることで被検体21をX線ビーム20を横切るようにt移動(復路)させる(S09)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0045】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS02で回転させた向きと同一向きに30°ステップ回転させる(S11)。その後、t移動番号12のt移動が終了するまでステップS07〜S11の処理を繰り返し、t移動番号12のt移動が終了すると(S10でYES)、機構部12はTRスキャンを終了する。
【0046】
表1に示すように、例えばt移動番号1のt移動が終わった時点では、初期位置からの回転角度φ(ステップ回転の積算)は、0°であり、t移動番号2のt移動が開始される前に30°ステップ回転されて回転角度が30°となる。また、t移動番号6のt移動が終わった時点では、回転角度は150°であり、t移動番号7のt移動が開始される前に30°+Δθ/2ステップ回転されて回転角度が180°+Δθ/2となる。さらに、t移動番号12のt移動が終わった時点では、回転角度は330°+Δθ/2となる。
【0047】
図4に、図3及び表1を用いて説明したTRスキャンがされた場合のステップ回転の互いに対向停止位置にあるt移動番号1(φ=0°)とt移動番号7(φ=180°+Δθ/2)についての被検体基準で表したX線パスpの方位ψの関係を示している。X線パスの被検体基準の方位ψは、t移動番号kでの回転角度φ(k)とチャンネルnが検出するX線パスpの撮影面22に沿ったX線検出器11の中央から測った角度であるセット角度θ(n)の和として、式(1)で表される。
【0048】
ψ(k,n)=φ(k)+θ(n) ・・・(1)
対向停止位置とは、回転角度φのある停止位置に対し、概略180°を成す停止位置のことをいう。
【0049】
X線検出器11の検出チャンネル数は、実際は100チャンネル以上であるが、図4において、便宜的に4チャンネル(1ch〜4ch)としている。図4に示す通り、t移動番号1及び7の回転位置は互いに180°からΔθ/2ずれ、検出するX線パスの角度ピッチを互いに補完する関係である。例えば、図4に示す例において、対向するX線パスp1及びp1’、X線パスp2及びp2’、X線パスp3及びp3’、X線パスp4及びp4’はそれぞれ互いに逆向きで方向はΔθ/2ずれている。また、図4に示していない他の互いに対向停止位置にある回転位置の組すべてについても表1で示すように、回転位置は、互いに180°からΔθ/2ずれている。これにより、逆向きパスで補完することで、360°に亘ってΔθ/2の間隔でX線パスができている。したがって、図3を用いて上述したt移動及びステップ回転を繰り返すTRスキャンにより、ψが360°に亘るよう、かつ、逆向きパスで互いに角度ピッチを補完するX線パスを成す透過データを取り込むことができる。
【0050】
t移動番号がk、X線検出器のチャンネル数がn、t移動位置がtであるとき、データ処理部15は、2×K回のt移動でそれぞれ取得した(ψ(k,n)で360°に亘る)透過データI(ψ,t)をフィルタ補正逆投影法により、検出チャンネル毎に該検出チャンネルが規定するX線パスの被検体基準の方位ψ(k,n)で360°に亘って逆投影して被検体の断面像を得る。
【0051】
上述した第1の実施形態に係るCT1によれば、透過データI(ψ,t)の方位ψの角度ピッチΔθ(Δθ=θ0/N)が補完され、Δθ/2の間隔で逆投影がなされるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。
【0052】
また、上述した第1の実施形態に係るCT1によれば、逆投影するとき、検出チャンネルの不均質配置を考慮して式(1)で計算したψ(k,n)を用いることで、逆投影を正確にでき、残存する細かな角度ピッチの放射状アーチファクトをさらに低減した断面像を得ることができる。
【0053】
さらに、上述した第1の実施形態に係るCT1によれば、0°〜360°の透過データを逆投影することで、180°分の逆投影とこれと逆向きの180°分の逆投影とにより、ファン角θ0ごとに残像する放射状アーチファクトを打ち消し合わせることができ、良好な断面像を得ることができる。上述した特許文献1には、ステップ回転を挟んだK回のトランスレートよりなるスキャンを、同じ方向にステップ回転続けながら、2回行って(2重スキャン)、各スキャンで得られる断面像を互いに180°回転させて加算することで、このファン角θ0ごとの残存する放射状アーチファクトを打ち消し合わせる方法が記載されている。特許文献1で、180°回転させて加算する理由は、各スキャンで完全に同じ逆投影を行っているためである。すなわち、1回目のスキャンで0°〜180°の透過データを0°〜180°で逆投影して断面像を作り、2回目のスキャンで180°〜360°の透過データを0°〜180°で逆投影して断面像を作っている。ここで、2回目のスキャンで180°〜360°で逆投影すれば、断面像は逆にならず、2つの断面像をそのまま加算すれば、同じ断面像ができる。また、0°〜360°の透過データを連続して0°〜360°で逆投影しても同じ断面像ができる。
【0054】
なお、第1の実施形態では、図3のフローチャートのステップS06で、30°+Δθ/2回転しているが、Δθの符号を逆にして、30°−Δθ/2回転させても、方位ψについて360°に亘り、かつ、逆向きパスで互いに角度ピッチを補完するX線パスを成す透過データを取り込むことができ、同様の効果が得られることは容易に分かる。
【0055】
〈第2の実施形態〉
本発明の第2の実施形態に係るコンピュータ断層撮影装置は、本発明の第1の実施の形態に係るコンピュータ断層撮影装置1のX線検出器11に替えて、図5に示すX線検出器11aを有している。図5では、X線検出器11aをX線ビーム20が入射する側と逆の側からみた状態を表しているが、X線検出器11aは、撮影面22に平行するチャンネル方向及び撮影面22に直交する列方向に複数の検出チャンネルを有している。第2の実施形態に係るコンピュータ断層撮影装置の他の構成については、図1を用いて上述した第1の実施形態に係るコンピュータ断層撮影装置1と同一であるため、説明を省略する。
【0056】
また、第2の実施形態に係るコンピュータ断層撮影装置におけるTRスキャンの方法は、図2乃至図4を用いて上述した第1の実施形態に係るコンピュータ断層撮影装置1の場合と同様であるが、X線検出器11aが複数のチャンネル列を有しているので、第1の実施の形態に係るコンピュータ断層撮影装置と比較して、チャンネル列数分の透過データI(k,n,t)を得ることができる。そして、第2の実施形態に係るコンピュータ断層撮影装置は、I(k,n,t)それぞれについて第1の実施形態と同じ再構成を行う。したがって、第2の実施形態に係るコンピュータ断層撮影装置では、一回のTRスキャンで、チャンネル列の数分(枚数分)の断面像を得ることができる。
【0057】
しかしながら、列数が多くなった場合、上記の再構成では撮影面22からずれた列ほどX線パスの撮影面22からの傾斜が大きくなるため断面像が劣化する。この場合は公知のコーンビーム再構成方法を用いる。このコーンビーム再構成方法は、X線検出器11aの列番号をmとし、透過データをI(m,k,n,t)で表したとき、(m,t)面上の透過データI(m,t)を一組とし、方位ψ(k,n)は一定(平行)で、回転軸23方向は焦点に向けて傾斜させ、三次元仮想マトリクスに対し逆投影する。ここで、仮想マトリクスのピッチは任意に設定でき、回転軸とこれに直交する2軸で同じでも変えてもよい。また、マトリクスサイズも任意に設定でき、列数によらない任意枚数の複数の断面像が得られる。これは、例えば、特開2005−361747等に記載される周知の再構成方法で、ψ範囲を180°から360°に変更したものである。
【0058】
上述したように、列数Mが多い2次元の検出マトリクスを持つX線検出器11aを用いる場合、撮影面22からずれた位置での断面像の劣化を防ぐため、コーンビーム再構成を用いるのが好ましい。
【0059】
第2の実施形態に係るCTによれば、第1の実施形態に係るCTと同様に、透過データI(n)の方位ψの角度ピッチΔθ(=θ0/N)が補完され、Δθ/2の間隔で逆投影がなされるので、残存する細かな角度ピッチの放射状アーチファクトを低減した断面像を得ることができる。また、第2の実施形態に係るCTによれば、逆投影するとき、検出チャンネルの不均質配置を考慮して上述した式(1)で計算したψ(k,n)を用いることで、逆投影を正確にでき、残存する細かな角度ピッチの放射状アーチファクトをさらに低減した断面像を得ることができる。さらに、第2の実施形態に係るCTによれば、ファン角θ0ごとの残存する放射状アーチファクトを打ち消し合わせた断面像を得ることができる。また、第2の実施形態に係るCTによれば、1回のスキャンで複数枚の断面像を得ることができる。
【0060】
〈第1の変形例〉
続いて、第1及び第2の実施形態に係るコンピュータ断層撮影装置の第1の変形例について説明する。第1の変形例に係るコンピュータ断層撮影装置の構成は、図1を用いて上述したコンピュータ断層撮影装置1と同一であるが、図6及び表2を用いて第1の変形例に係る処理の流れを説明するように、機構制御部14で記憶しているシークエンスが異なる。
【表2】
【0061】
図6及び表2では、K=6、θ0=30°であるとして説明する。第1の変形例に係るコンピュータ断層撮影装置においてTRスキャンが開始されると、機構部12は、回転テーブル13を移動させることで被検体21をX線ビーム20を横切るようにt移動(往路)させる(S21)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置のそれぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0062】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13を30°+Δθ/2ステップ回転させる(S22)。
【0063】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS21とは逆向きに移動させることで、被検体21をX線ビーム20を横切るように逆向きにt移動(復路)させる(S23)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれで、X線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0064】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°−Δθ/2ステップ回転させる(S25)。
【0065】
t移動番号6のt移動が終了するまで上述したステップS21〜S25の処理を繰り返し、t移動番号6のt移動が終了すると(S24でYES)、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°ステップ回転させる(S26)。
【0066】
続いて、機構部12は、回転テーブル13をステップS21と同一方向に移動させることで、被検体21をX線ビーム20を横切るようにt移動(往路)させる(S27)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0067】
t移動(往路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°−Δθ/2ステップ回転させる(S28)。
【0068】
ステップ回転が終了すると、機構部12は、回転テーブル13をステップS27とは逆の向きに移動させることで被検体21をX線ビーム20を横切るように逆向きにt移動(復路)させる(S29)。X線検出器11は、t移動の移動中に、一定移動間隔(一定ピッチ)の多数の位置それぞれでX線ビーム20を検出し、透過データI(n)としてデータ処理部15に出力する。
【0069】
t移動(復路)が終了すると、機構部12は、被検体21が載置される回転テーブル13をステップS22で回転させた向きと同一向きに30°+Δθ/2ステップ回転させる(S31)。その後、t移動番号12のt移動が終了するまでS27〜S31の処理を繰り返す。
【0070】
表2に示すように、例えばt移動番号1のt移動が終わった時点では、初期位置からの回転角度(ステップ回転の積算)は、0°であり、t移動番号2のt移動が開始される前に30°+Δθ/2ステップ回転されて回転角度が30°+Δθ/2となる。また、t移動番号6のt移動が終わった時点では、回転角度は150°+Δθ/2であり、t移動番号7のt移動が開始される前に30°ステップ回転されて回転角度が180°+Δθ/2となる。さらに、t移動番号12のt移動が終わった時点では、回転角度は330°となる。
【0071】
上述したように、機構制御部14は、機構部12に表2に示すようなステップ回転をさせるように制御すれば、ステップ回転の対向停止位置は180°からΔθ/2ずれ、X線パスの被検体基準の方位ψが360°に亘り、かつ、方位ψが逆向きパスで互いに重ならないようにすることができる。
【0072】
〈第2の変形例〉
第2の変形例に係るコンピュータ断層撮影装置3は、図7に示すように、X線管30から照射され、被検体21を透過したX線ビーム20を2次元のチャンネルマトリックスを持つX線検出器31で検出して画像を構成する点では第2の実施形態と同一の構成であるが、t移動及び回転についての機構が異なる。すなわち、図1を用いて上述した第1及び第2の実施形態に係るコンピュータ断層撮影装置では、被検体21をトランスレート(t移動)及び回転させている。しかし、第2の変形例に係るコンピュータ断層撮影装置は、被検体21を固定し、X線管30とX線検出器31を一体でトランスレート(t移動)及び回転させるものである。このように移動制御することで、相対的には、X線管30及びX線検出器31と被検体21との関係は、上述したように被検体21を移動制御する場合と等価なものとなる。
【0073】
具体的には、第2の変形例に係るコンピュータ断層撮影装置3では、フロア34に支持されるXYZ機構35上に被検体21が載置されている。被検体21は、XYZ機構35により、X線ビーム20に対し、X,Y,Z方向の3方向に移動させることができるが、スキャンの際には移動された位置で固定されている。
【0074】
コンピュータ断層撮影装置3では、回転機構36がフロア34により支持され、回転機構36はt移動機構37を支持し、t移動機構37全体をt移動方向とともに回転させる。またt移動機構37はフレーム38を支持し、t移動機構37はフレーム38をt移動方向に移動させることができる。X線管30とX線検出器31は対向してフレーム38によって固定されている。コンピュータ断層撮影装置3において、t移動の方向は、図7に示す回転の位置においては紙面に垂直な方向であるが、回転に伴い、フレーム38とt移動機構37と共に回転する。
【0075】
その他、図示を省略するが、図7に示すコンピュータ断層撮影装置3においても、図1に示したコンピュータ断層撮影装置1と同一の構成を有している。そのため、コンピュータ断層撮影装置3においても、機構制御部に記憶されるシークエンスによってt移動機構37を制御してX線管30及びX線検出器31を固定するフレーム38をt移動するとともに回転機構36によって回転軸23を中心に回転させ、被検体21の断面像を撮影する。
【0076】
このように、図7に示すコンピュータ断層撮影装置3においても、相対的に等価なTRスキャンをすることができる。
【0077】
第2の変形例で上述したように、機構動作は相対的に等価であれば、他の機構方式に対しても同様である。
【0078】
〈他の変形例〉
上述した第1及び第2の実施形態では、X線ビーム20のファン角θ0の範囲を検出しているが、θ0を超えて検出するようにしてもよい。この場合、隣り合うt移動で重複した方位ψで透過データが取得されるが、例えば、特開2005−361741等に記載されるようにこの重複したψで透過データがウエイト付きで平均されるように再構成することができる。
【0079】
上述した第1及び第2の実施形態では、データ処理部15は、被検体基準の方位ψで360°に亘る透過データをψで360°に亘って逆投影して被検体の断面像を得ているが、透過データをψで複数に分割し、それぞれで逆投影して未完の断面像(部分画像)を再構成し、それぞれの部分画像を加算することで断面像を作成しても数学的に等価である。例えば、最初の180°と次の180°で部分画像を作成して加算し、平均するようにしてもよい。
【0080】
上述した第1の実施形態及び第1の変形例では、互いに対向停止位置にある2つの回転停止位置の組は、すべて、互いに180°からΔθ/2ずらしている。このずれは、Δθ/2には限られない。例えば、iを整数として、一般に±(Δθ/2+i・Δθ)だけずらしてもよい。さらに、iは各組ごとに異なる数であっても良い。ここで、ずらし量の絶対値がΔθ/2を超える場合においては、隣接するt移動がカバーする方位ψに抜けが生じないようにするため、θ0を超えて検出するようにする。そして、ψに抜けや重複が生じないように使用チャンネル範囲をt移動ごとに調整する。
【0081】
上述した第1及び第2の実施形態では、断層像を再構成する方法は、フィルタ補正逆投影法には限られず、フーリエ変換法やART(Algebraic Reconstruction Technique)のような公知のアルゴリズムを用いてもよい。
【0082】
上述した第1及び第2の実施形態では、放射線としてX線を用いて説明しているが、透過性の放射線であれば、γ線、中性子線、マイクロ波等他の放射線であっても同様である。また、被検体が透明物体である場合、可視光線であっても同様である。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施形態に係るコンピュータ断層撮影装置の概念図である。
【図2】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるX線パスの間隔について説明する図である。
【図3】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるTRスキャンの処理を説明するフローチャートである。
【図4】本発明の第1の実施形態に係るコンピュータ断層撮影装置におけるX線の対向パスについて説明する図である。
【図5】本発明の第2の実施形態に係るコンピュータ断層撮影装置のX線検出器を説明する図である。
【図6】本発明の第1の変形例に係るコンピュータ断層撮影装置におけるTRスキャンの処理を説明するフローチャートである。
【図7】本発明の第2の変形例に係るコンピュータ断層撮影装置の概念図である。
【図8】従来のコンピュータ断層撮影装置のTRスキャンを説明する図。
【符号の説明】
【0084】
1…コンピュータ断層撮影装置
10…X線管(放射線源)
11…X線検出器(放射線検出器)
12…機構部
13…回転テーブル
14…機構制御部
15…データ処理部
16…表示部
20…X線ビーム(放射線)
21…被検体
22…撮影面
23…回転軸
【特許請求の範囲】
【請求項1】
2以上の自然数Kに対し、180°/Kの角度をθ0として、
撮影面に沿ってθ0を覆うファン形状の放射線を放射する放射線源と、
前記撮影面に沿って少なくともθ0の範囲の被検体を透過した前記放射線を検出する検出チャンネルを複数有する放射線検出器と、
前記被検体が前記撮影面に沿って前記放射線と交差する方向に複数回の直線移動をするように前記放射線源及び前記被検体を相対的に制御するとともに、前記撮影面に垂直な回転軸を中心としてステップ回転するように前記放射線源及び前記被検体の位置関係を相対的に制御する機構部と、
前記機構部に、前記直線移動をさせるとともに、各前記直線移動と次の前記直線移動との間に、同一向きに前記ステップ回転をさせて、2×K回の前記直線移動をさせる機構制御部であり、前記ステップ回転の複数の停止位置が互いに180°を成す位置にならないよう予めずらして設定してステップ回転させる機構制御部と、
それぞれの前記直線移動の移動中に前記放射線を検出した前記放射線検出器が出力する前記被検体の透過データを入力し、該透過データから前記被検体の断面像を生成するデータ処理部と、
を有することを特徴とするコンピュータ断層撮影装置。
【請求項2】
請求項1記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、前記ステップ回転の複数の停止位置を互いに180°を成す位置からΔθ/2ずらすようにステップ回転させることを特徴とするコンピュータ断層撮影装置。
【請求項3】
請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0+Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを特徴とするコンピュータ断層撮影装置。
【請求項4】
請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0−Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを特徴とするコンピュータ断層撮影装置。
【請求項5】
請求項1乃至4のうちいずれか1記載のコンピュータ断層撮影装置において、
前記データ処理部は、それぞれの前記直線移動の移動中に取得した前記透過データを前記検出チャンネル毎に該検出チャンネルが検出する放射線パスの前記被検体を基準とする方位ψで360°に亘って逆投影して被検体の断面像を生成することを特徴とするコンピュータ断層撮影装置。
【請求項6】
請求項1乃至5のうちいずれか1記載のコンピュータ断層撮影装置において、
前記放射線検出器は、前記検出チャンネルを前記撮影面に平行な方向及び前記撮影面に直交する方向に複数列有することを特徴とするコンピュータ断層撮影装置。
【請求項1】
2以上の自然数Kに対し、180°/Kの角度をθ0として、
撮影面に沿ってθ0を覆うファン形状の放射線を放射する放射線源と、
前記撮影面に沿って少なくともθ0の範囲の被検体を透過した前記放射線を検出する検出チャンネルを複数有する放射線検出器と、
前記被検体が前記撮影面に沿って前記放射線と交差する方向に複数回の直線移動をするように前記放射線源及び前記被検体を相対的に制御するとともに、前記撮影面に垂直な回転軸を中心としてステップ回転するように前記放射線源及び前記被検体の位置関係を相対的に制御する機構部と、
前記機構部に、前記直線移動をさせるとともに、各前記直線移動と次の前記直線移動との間に、同一向きに前記ステップ回転をさせて、2×K回の前記直線移動をさせる機構制御部であり、前記ステップ回転の複数の停止位置が互いに180°を成す位置にならないよう予めずらして設定してステップ回転させる機構制御部と、
それぞれの前記直線移動の移動中に前記放射線を検出した前記放射線検出器が出力する前記被検体の透過データを入力し、該透過データから前記被検体の断面像を生成するデータ処理部と、
を有することを特徴とするコンピュータ断層撮影装置。
【請求項2】
請求項1記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、前記ステップ回転の複数の停止位置を互いに180°を成す位置からΔθ/2ずらすようにステップ回転させることを特徴とするコンピュータ断層撮影装置。
【請求項3】
請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0+Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを特徴とするコンピュータ断層撮影装置。
【請求項4】
請求項1又は2記載のコンピュータ断層撮影装置において、隣接する前記検出チャンネルそれぞれが検出する放射線パス間の角度をΔθとしたとき、
前記機構制御部は、前記機構部に、θ0のステップ回転を挟んだ前記直線移動をK回実行させ、次にθ0−Δθ/2のステップ回転を1回実行させ、次にθ0のステップ回転を挟んだ前記直線移動をK回実行させることを特徴とするコンピュータ断層撮影装置。
【請求項5】
請求項1乃至4のうちいずれか1記載のコンピュータ断層撮影装置において、
前記データ処理部は、それぞれの前記直線移動の移動中に取得した前記透過データを前記検出チャンネル毎に該検出チャンネルが検出する放射線パスの前記被検体を基準とする方位ψで360°に亘って逆投影して被検体の断面像を生成することを特徴とするコンピュータ断層撮影装置。
【請求項6】
請求項1乃至5のうちいずれか1記載のコンピュータ断層撮影装置において、
前記放射線検出器は、前記検出チャンネルを前記撮影面に平行な方向及び前記撮影面に直交する方向に複数列有することを特徴とするコンピュータ断層撮影装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−51548(P2008−51548A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−225601(P2006−225601)
【出願日】平成18年8月22日(2006.8.22)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月22日(2006.8.22)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]