
コンベア装置
【課題】コンベアベルトの蛇行を修正するための機構を簡素化し、コンベア装置の低コスト化と信頼性の向上とを実現する。
【解決手段】ベルト4の搬送始端に配置される始端プーリと、搬送終端に配置される終端プーリ2と、ベルト4の往路の内面に配置される支点プーリ7と、ベルト4の復路の内面に配置される駆動プーリ3と、支点プーリ7と終端プーリ2を回転自在に軸支するコンベアフレーム8と、コンベアフレーム8を支点プーリ7の中心軸の回りに上下に揺動操作するチルト機構9とを備えている。ベルト4の蛇行を修正する修正プーリ15が、コンベアフレーム8の全揺動角度範囲内において、ベルト4の復路を駆動プーリ3へ向かって変向案内できる位置に配置することにより、コンベアフレーム8の全揺動角度範囲内において、1個の修正プーリ15でベルト4の蛇行を修正できる。
【解決手段】ベルト4の搬送始端に配置される始端プーリと、搬送終端に配置される終端プーリ2と、ベルト4の往路の内面に配置される支点プーリ7と、ベルト4の復路の内面に配置される駆動プーリ3と、支点プーリ7と終端プーリ2を回転自在に軸支するコンベアフレーム8と、コンベアフレーム8を支点プーリ7の中心軸の回りに上下に揺動操作するチルト機構9とを備えている。ベルト4の蛇行を修正する修正プーリ15が、コンベアフレーム8の全揺動角度範囲内において、ベルト4の復路を駆動プーリ3へ向かって変向案内できる位置に配置することにより、コンベアフレーム8の全揺動角度範囲内において、1個の修正プーリ15でベルト4の蛇行を修正できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送面の全体を上下に揺動変位させて搬送対象の搬出先を変更できるコンベア装置に関する。
【背景技術】
【0002】
この種のコンベア装置は、例えば特許文献1に公知である。そこでは、コンベアベルトの搬送始端に配置される始端プーリと、コンベアベルトの搬送終端に配置される終端プーリと、コンベアベルトの内面に配置される支点プーリなどでコンベア装置を構成している。支点プーリと終端プーリは、左右一対のコンベアフレームで回転自在に軸支してある。コンベアフレームは、フレーム下部に設けた油圧シリンダで支点プーリの中心軸の回りに上下揺動操作でき、これにより搬送対象の搬出先を上下に変更できる。
【0003】
【特許文献1】特開平11−11629号公報
【0004】
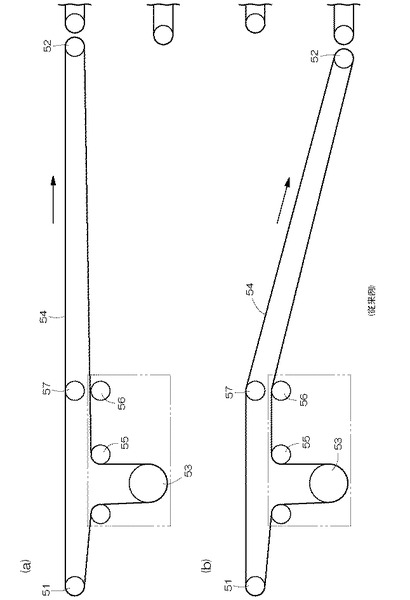
この種のコンベア装置においては、ベルト上に載置される搬送対象の偏りが原因となってベルトが幅方向へ蛇行することがあり、こうした蛇行を修正するために修正プーリを付加することがある。修正プーリを備えた従来のコンベア装置を図5に示す。そこでは、搬送始端に配置される始端プーリ51と、搬送終端に配置される終端プーリ52と、両プーリ51・52の中途部下方に配置される駆動プーリ53と、これら3個のプーリ51〜53に巻き掛けられるコンベアベルト54などでコンベア装置を構成している。搬送対象は矢印の向きに搬送される。終端プーリ52と駆動プーリ53の間の復路には、蛇行修正用の2個の修正プーリ55・56が配置してある。また、始端プーリ51と終端プーリ52の間の往路には、搬送面が下り傾斜するときにコンベアベルト54を受け止める支点プーリ57が配置してある。図示していないが、支点プーリ57と終端プーリ52とは一対のコンベアフレームで軸支してあり、支点プーリ57の中心軸の回りにコンベアフレームを上下に揺動操作して、搬送先を上下に変更できる。
【0005】
図5(a)に示すようにコンベアベルト54の搬送面が水平の場合には、支点プーリ57の下方に位置する修正プーリ56はベルト4に接触しておらず、駆動プーリ53に近い側の修正プーリ55でコンベアベルト54が変向案内されて屈曲するので、この修正プーリ55で蛇行修正を行う。図5(b)に示すようにコンベアベルト54の搬送面が下り傾斜する場合には、コンベアベルト54の復路が支点プーリ57の下方に位置する修正プーリ56で変向案内されるので、この修正プーリ56で蛇行修正を行う。
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記の従来装置では、コンベアベルト54の搬送面が水平な場合と下り傾斜する場合とで、異なる修正プーリ55・56によって蛇行を修正する。そのため駆動プーリ53の周辺構造が複雑になり、その分だけコンベア装置のコストが嵩む。また、搬送面が水平な場合と下り傾斜する場合とでコンベアベルト54の屈曲位置が異なるので、コンベアベルト54の張力のバランスが僅かに変化するのを避けられない。
【0007】
本発明は、コンベアベルトの蛇行を修正するための機構を簡素化し、コンベア装置の低コスト化と信頼性の向上とを実現することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係るコンベア装置は、コンベアベルトの搬送始端に配置される始端プーリと、コンベアベルトの搬送終端に配置される終端プーリと、コンベアベルトの往路の内面に配置される支点プーリと、コンベアベルトの復路の内面に配置されて、コンベアベルトを送り駆動する駆動プーリと、支点プーリと終端プーリを回転自在に軸支するコンベアフレームと、コンベアフレームを支点プーリの中心軸の回りに上下に揺動操作するチルト機構とを備えている。そして、コンベアベルトの蛇行を修正する修正プーリが、コンベアフレームの全揺動角度範囲内において、コンベアベルトの復路を駆動プーリへ向かって変向案内できる位置に配置されている。これによれば、コンベアフレームの全揺動角度範囲内において、1個の修正プーリでコンベアベルトの蛇行を修正できる。
なお、本発明においてコンベアベルトの「往路」とは、搬送対象の搬送に供する始端プーリから終端プーリまでの部分を指し、「復路」とは、終端プーリから駆動プーリを経て始端プーリに戻るまでの部分を指す。
【0009】
詳しくは、修正プーリが支点プーリの近傍で下方に配置されており、コンベアフレームが上方揺動限界に位置する状態において、コンベアベルトの復路が支点プーリの周面下部の近傍を通過するように構成されている。
【0010】
具体的には、クラウンローラ状に形成される修正プーリのプーリ軸の一方が、駆動部フレームに形成した長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、蛇行調整機構が、他方のプーリ軸を受け止める調整ねじと、駆動部フレームに固定されて調整ねじがねじ込まれる雌ねじ体とを含むものとすることができる。
【0011】
より具体的には、駆動プーリで送り駆動されたコンベアベルトを始端プーリへ向かって変向案内するテンションプーリが、駆動プーリの近傍に配置されており、テンションプーリは、駆動部フレームに設けたテンション溝に沿ってスライド自在に支持されて、テンションばねでコンベアベルトを緊張する向きに移動付勢してある。
【発明の効果】
【0012】
本発明に係るコンベア装置では、コンベアフレームの全揺動角度範囲内において、1個の修正プーリでコンベアベルトの蛇行を修正できるようにした。これによれば、従来は2個必要であった修正プーリを1個に削減できるので、駆動プーリの周辺構造を簡素化してコンベア装置の低コスト化を実現することができる。更に、修正プーリを1個にしたことで、コンベアベルトの屈曲位置が統一されるので、搬送面の傾斜角度の変更によるコンベアベルトの張力のバランスが変化するのを防止して、コンベア装置の信頼性の向上を実現することができる。
【0013】
修正プーリの配置が下方寄りであると、コンベアフレームが上方揺動限界に位置する状態において、修正プーリとの接触部におけるコンベアベルトの屈折角度が180°に近くなる。この場合は、修正プーリとコンベアベルトの接触面積が小さくなって、修正プーリの機能を発揮させるのが困難になる。これに対し、本発明のように、修正プーリを支点プーリの近傍で下方に配置して、コンベアフレームが上方揺動限界に位置する状態において、コンベアベルトの復路が支点プーリの周面下部の近傍を通過するようにしていると、修正プーリとコンベアベルトの接触面積を充分に大きくとることができるので、修正プーリの機能を確実に発揮させることができる。
【0014】
修正プーリのプーリ軸の一方が長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、蛇行調整機構が、他方のプーリ軸を受け止める調整ねじと、調整ねじがねじ込まれる雌ねじ体とを含むものとしていると、コンベアベルトがいずれの側に蛇行しても、調整ねじを回転操作するだけで蛇行を修正できる。また、コンベアベルトが一方のプーリ軸側に蛇行した場合と、他方のプーリ軸側に蛇行した場合とでは、調整ねじの回転方向が異なるだけであり、同じ調整ねじを共通して使用できる。つまり、操作部分を1箇所に集中させたので、各プーリ軸にそれぞれ蛇行調整機構を設ける場合に比べて、修正プーリの周辺構造を大幅に簡素化できる。
【0015】
テンションプーリがテンション溝に沿ってスライド自在に支持されて、テンションばねでコンベアベルトを緊張する向きに移動付勢してあると、コンベアフレームの揺動変位によりコンベアベルトの緊張力が変化する場合に、テンションローラがスライド変位することで緊張力の変化分を吸収できるので、コンベアベルトの緊張力を常に一定に維持することができる。これにより、搬送対象を常に安定した状態で搬送することが可能となる。
【発明を実施するための最良の形態】
【0016】
図1から図4に、本発明に係るコンベア装置の実施形態を示す。このコンベア装置は、図2に示すように、搬送始端に配置される始端プーリ1と、搬送終端に配置される終端プーリ2と、両プーリ1・2の中途部下方に配置される駆動プーリ3と、これら3個のプーリ1〜3に巻き掛けられるコンベアベルト(以下、単にベルトと記す)4などで構成してある。駆動プーリ3は、モータ5からの動力を受けて回転駆動することで、ベルト4を送り駆動する。図2において搬送対象は左方から右方へ搬送されており、始端プーリ1側において隣接するコンベア装置70から搬送されてきた搬送対象は、ベルト4の上面に受け渡されて該ベルト4上を進み、終端プーリ2側において隣接する上下一対のコンベア装置80・90のいずれかに搬出される。
【0017】
始端プーリ1と終端プーリ2の間の往路の内面には、支点プーリ7が配置してある。この支点プーリ7は、駆動プーリ3よりも搬送方向終端寄りに位置しており、搬送面が下り傾斜するときにベルト4を受け止めることができる(図1(b)参照)。支点プーリ7と終端プーリ2は一対のコンベアフレーム8・8で軸支してあり、コンベアフレーム8は操作シリンダ(チルト機構)9により支持してある。操作シリンダ9はシリンダバレル10およびピストンロッド11を備えており、シリンダバレル10の下端部が、床面に固定したベース12に対して揺動変位可能に連結されるとともに、ピストンロッド11の上端部が、コンベアフレーム8に対して揺動変位可能に連結されている。
【0018】
ピストンロッド11を出退操作すると、図1に示すように、コンベアフレーム8が支点プーリ7の中心軸の回りに上下に揺動する。図1(a)は、コンベアフレーム8の上方揺動限界を示しており、このときベルト4の往路は水平になる。終端プーリ2は上段のコンベア装置80に指向しており、ベルト4の往路上を搬送される搬送対象は該コンベア装置80に受け渡される。
【0019】
コンベアフレーム8が上方揺動限界に位置する状態からピストンロッド11を退入操作すると、コンベアフレーム8は下方に揺動して、図1(b)に示す下方揺動限界に至る。このときベルト4の往路は、支点プーリ7から終端プーリ2にわたって下り傾斜している。終端プーリ2は下段のコンベア装置90に指向しており、ベルト4の往路上を搬送される搬送対象は該コンベア装置90に受け渡される。このように本実施形態では、操作シリンダ9によりコンベアフレーム8を上下に揺動操作して、ベルト4の往路の傾斜角度を変化させることで、搬送対象の搬出先となるコンベア装置を上下に変更できる。
【0020】
図1に示すように、駆動プーリ3の近傍には、ベルト4の蛇行を修正する1個の修正プーリ15と、ベルト4を緊張させるテンションプーリ16とが配置してあり、これら3つのプーリ3・15・16とモータ5などでベルト4の駆動部17を構成してある。また、修正プーリ15およびテンションプーリ16は一対の駆動部フレーム18・18で軸支してある。
【0021】
テンションプーリ16は、図3に示すように、駆動プーリ3で送り駆動されたベルト4を始端プーリ1へ向かって変向案内している。テンションプーリ16は、駆動部フレーム18・18に設けたテンション溝19・19に沿ってスライド自在に支持してあり、更にベルト4が緊張する向きにテンションばね20で移動付勢してある。このように構成したテンションプーリ16によれば、コンベアフレーム8の揺動変位によりベルト4の緊張力が変化する場合に、テンションローラ16がスライド変位することで緊張力の変化分を吸収できるので、ベルト4の緊張力を常に一定に維持することができる。
【0022】
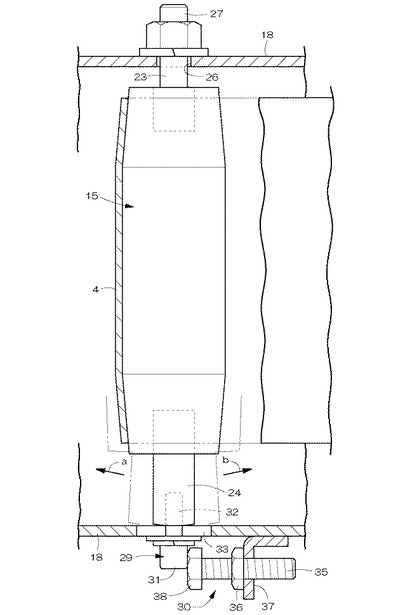
修正プーリ15は、図3および図4に示すように、径寸法が均一の中央部および先窄まり状の両端部を備えるクラウンローラ状に形成してあり、両端部のそれぞれにプーリ軸23・24が固定してある。このうち一方のプーリ軸23は、一方の駆動部フレーム18に開設された長穴26を貫通した状態で外側からナット27をねじ込まれることで、該駆動部フレーム18に対して固定してある。したがってプーリ軸23は、ナット27との螺合部を中心として、長穴26の長さの範囲内において僅かに傾動することができる。
【0023】
他方のプーリ軸24は、先端部にビス29が固定してあり、該ビス29が蛇行調整機構30で受け止められている。ビス29は頭部31および軸部32を備えており、軸部32の先端半部がプーリ軸24内に埋没されている。軸部32のプーリ軸24からの突出部分が、他方の駆動部フレーム18に開設された長穴33を貫通しており、頭部31は該駆動部フレーム18の外側に露出している。なお、プーリ軸24用の長穴33は、プーリ軸23用の長穴26よりも長くなるように形成してある。したがってプーリ軸24は、図4に想像線で示すように、プーリ軸23よりも大きな幅で傾動することができる。
【0024】
蛇行調整機構30は、ビス29を介してプーリ軸24を受け止める調整ねじ35と、調整ねじ35がねじ込まれるナット(雌ねじ体)36とを備えており、ナット36はブラケット37を介して駆動部フレーム18の外面に固定してある。調整ねじ35を回転操作することで、ナット36から調整ねじ35の頭部38までの距離を大小に変更できる。
【0025】
上記の修正プーリ15を用いたベルト4の蛇行修正操作について説明する。ベルト4が修正プーリ15の傾動先端側(プーリ軸24側)に蛇行した場合には、頭部38がナット36から離れる方向に調整ねじ35を回転操作する。これにより、プーリ軸24に固定したビス29が調整ねじ35の頭部38に押されて、修正プーリ15が図4の矢印a方向に揺動変位する。この修正プーリ15の揺動変位により、ベルト4と修正プーリ15の接触部分において、傾動先端側におけるベルト4の張力が、傾動中心側(プーリ軸23側)における張力よりも大きくなることから、ベルト4の傾動中心側への移動が促されて、ベルト4の蛇行が修正される。
【0026】
逆に、ベルト4が修正プーリ15の傾動中心側(プーリ軸23側)に蛇行した場合には、頭部38がナット36に近付く方向に調整ねじ35を回転操作する。修正プーリ15は、ベルト4に圧接することで、ベルト4から離れる方向に力を受けているので、頭部38がナット36に近付けば、修正プーリ15はその分だけ矢印b方向に傾動変位する。この修正プーリ15の揺動変位により、ベルト4と修正プーリ15の接触部分において、傾動先端側(プーリ軸24側)におけるベルト4の張力が、傾動中心側における張力よりも小さくなることから、ベルト4の傾動先端側への移動が促されて、ベルト4の蛇行が修正される。
【0027】
本実施形態に係る修正プーリ15は、その配置に特徴を有する。すなわち、修正プーリ15は、コンベアフレーム8の全揺動角度範囲内において、ベルト4の復路を駆動プーリ3へ向かって変向案内できる位置に配置されている。具体的には、コンベアフレーム8が上方揺動限界に位置する図1(a)の状態において、修正プーリ15の外周面の少なくとも一部が、終端プーリ2の断面と駆動プーリ3の断面との共通外接線40より上側に位置するように、修正プーリ15を配置する。この共通外接線40は、両プーリ2・3の断面の間に引くことができる2本の共通外接線のうち下側のものであり、図1(a)に一点鎖線で示した。このように、コンベアフレーム8が上方揺動限界に位置するときに修正プーリ15がベルト4を変向案内できるようにすることで、コンベアフレーム8の全揺動角度範囲内において修正プーリ15がベルト4を変向案内できる。このように配置した修正プーリ15は、コンベアフレーム8の姿勢に関係なく常にベルト4の蛇行を修正することができる。
【0028】
図1に示すように、コンベアフレーム8が上方揺動限界に位置する(a)の状態と、下方揺動限界に位置する(b)の状態とでは、前者の方が修正プーリ15とベルト4の接触面積が小さくなる。この接触面積が不足すると、修正プーリ15の機能が充分に発揮されなくなるおそれがある。そこで本実施形態では、修正プーリ15を支点プーリ7の近傍下方に配置して、コンベアフレーム8が上方揺動限界に位置するときにベルト4の復路が支点プーリ7の周面下部の近傍を通過するようにした。これにより、修正プーリ15とベルト4の接触面積を充分に大きくとることができるので、修正プーリ15の機能を確実に発揮させることができる。なお、ベルト4が支点プーリ7に接触してしまうと、修正プーリ15がその機能を充分に発揮することができず、本発明の目的を達成することはできなくなる。
【0029】
以上のように、本実施形態に係るコンベア装置においては、コンベアフレーム8の姿勢に関係なく常に1個の修正プーリ15でベルト4の蛇行を修正できるようにした。この構成によれば、従来は2個必要であった修正プーリを1個に削減できるので、駆動プーリ3の周辺構造を簡素化して、コンベア装置の低コスト化を実現することができる。更に、修正プーリを1個にしたことで、ベルト4の屈曲位置が統一されるので、搬送面の傾斜角度の変更によるベルト4の張力のバランスが変化するのを防止して、コンベア装置の信頼性の向上を実現することができる。
【0030】
上記以外に、修正ローラ15は、太鼓型のクラウンローラ状などに形成してあってもよく、その形状は特に限定されるものではない。コンベアフレーム8のチルト機構は操作シリンダ9に限られない。
【図面の簡単な説明】
【0031】
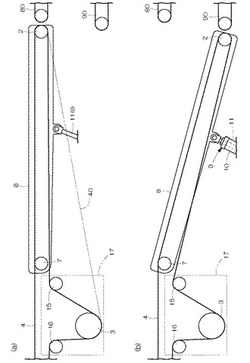
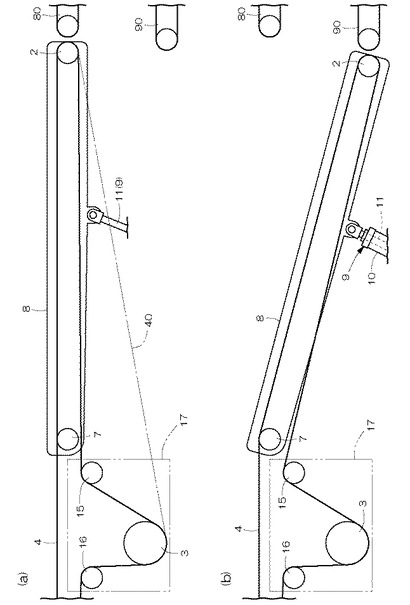
【図1】(a)・(b)は、コンベアベルトの姿勢変位を説明する図である。
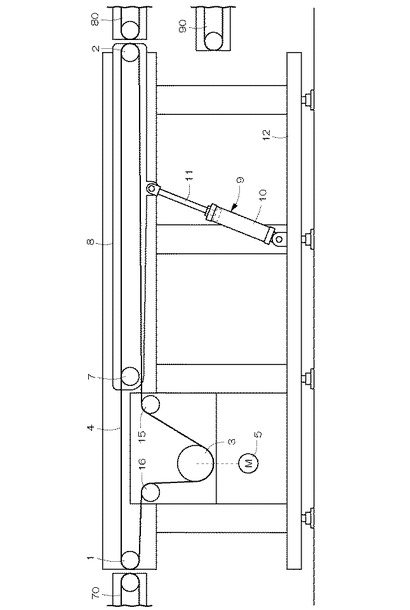
【図2】コンベア装置の全体構成を示す正面図である。
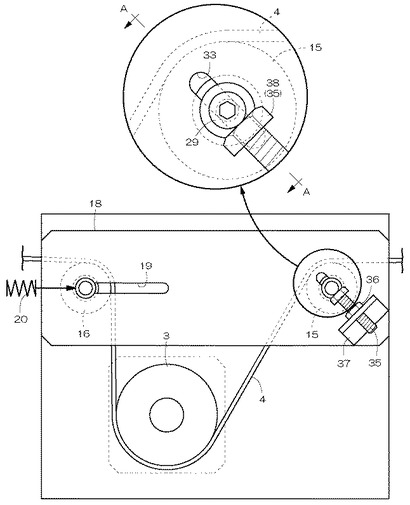
【図3】コンベア装置の要部の正面図である。
【図4】修正プーリの構成を示す、図3のA−A線断面図である。
【図5】従来のコンベア装置におけるベルトの姿勢変位を説明する図である。
【符号の説明】
【0032】
1 始端プーリ
2 終端プーリ
3 駆動プーリ
4 コンベアベルト
7 支点プーリ
8 コンベアフレーム
9 操作シリンダ(チルト機構)
15 修正プーリ
16 テンションプーリ
19 テンション溝
20 テンションばね
23 プーリ軸
24 プーリ軸
30 蛇行調整機構
35 調整ねじ
36 ナット(雌ねじ体)
【技術分野】
【0001】
本発明は、搬送面の全体を上下に揺動変位させて搬送対象の搬出先を変更できるコンベア装置に関する。
【背景技術】
【0002】
この種のコンベア装置は、例えば特許文献1に公知である。そこでは、コンベアベルトの搬送始端に配置される始端プーリと、コンベアベルトの搬送終端に配置される終端プーリと、コンベアベルトの内面に配置される支点プーリなどでコンベア装置を構成している。支点プーリと終端プーリは、左右一対のコンベアフレームで回転自在に軸支してある。コンベアフレームは、フレーム下部に設けた油圧シリンダで支点プーリの中心軸の回りに上下揺動操作でき、これにより搬送対象の搬出先を上下に変更できる。
【0003】
【特許文献1】特開平11−11629号公報
【0004】
この種のコンベア装置においては、ベルト上に載置される搬送対象の偏りが原因となってベルトが幅方向へ蛇行することがあり、こうした蛇行を修正するために修正プーリを付加することがある。修正プーリを備えた従来のコンベア装置を図5に示す。そこでは、搬送始端に配置される始端プーリ51と、搬送終端に配置される終端プーリ52と、両プーリ51・52の中途部下方に配置される駆動プーリ53と、これら3個のプーリ51〜53に巻き掛けられるコンベアベルト54などでコンベア装置を構成している。搬送対象は矢印の向きに搬送される。終端プーリ52と駆動プーリ53の間の復路には、蛇行修正用の2個の修正プーリ55・56が配置してある。また、始端プーリ51と終端プーリ52の間の往路には、搬送面が下り傾斜するときにコンベアベルト54を受け止める支点プーリ57が配置してある。図示していないが、支点プーリ57と終端プーリ52とは一対のコンベアフレームで軸支してあり、支点プーリ57の中心軸の回りにコンベアフレームを上下に揺動操作して、搬送先を上下に変更できる。
【0005】
図5(a)に示すようにコンベアベルト54の搬送面が水平の場合には、支点プーリ57の下方に位置する修正プーリ56はベルト4に接触しておらず、駆動プーリ53に近い側の修正プーリ55でコンベアベルト54が変向案内されて屈曲するので、この修正プーリ55で蛇行修正を行う。図5(b)に示すようにコンベアベルト54の搬送面が下り傾斜する場合には、コンベアベルト54の復路が支点プーリ57の下方に位置する修正プーリ56で変向案内されるので、この修正プーリ56で蛇行修正を行う。
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記の従来装置では、コンベアベルト54の搬送面が水平な場合と下り傾斜する場合とで、異なる修正プーリ55・56によって蛇行を修正する。そのため駆動プーリ53の周辺構造が複雑になり、その分だけコンベア装置のコストが嵩む。また、搬送面が水平な場合と下り傾斜する場合とでコンベアベルト54の屈曲位置が異なるので、コンベアベルト54の張力のバランスが僅かに変化するのを避けられない。
【0007】
本発明は、コンベアベルトの蛇行を修正するための機構を簡素化し、コンベア装置の低コスト化と信頼性の向上とを実現することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係るコンベア装置は、コンベアベルトの搬送始端に配置される始端プーリと、コンベアベルトの搬送終端に配置される終端プーリと、コンベアベルトの往路の内面に配置される支点プーリと、コンベアベルトの復路の内面に配置されて、コンベアベルトを送り駆動する駆動プーリと、支点プーリと終端プーリを回転自在に軸支するコンベアフレームと、コンベアフレームを支点プーリの中心軸の回りに上下に揺動操作するチルト機構とを備えている。そして、コンベアベルトの蛇行を修正する修正プーリが、コンベアフレームの全揺動角度範囲内において、コンベアベルトの復路を駆動プーリへ向かって変向案内できる位置に配置されている。これによれば、コンベアフレームの全揺動角度範囲内において、1個の修正プーリでコンベアベルトの蛇行を修正できる。
なお、本発明においてコンベアベルトの「往路」とは、搬送対象の搬送に供する始端プーリから終端プーリまでの部分を指し、「復路」とは、終端プーリから駆動プーリを経て始端プーリに戻るまでの部分を指す。
【0009】
詳しくは、修正プーリが支点プーリの近傍で下方に配置されており、コンベアフレームが上方揺動限界に位置する状態において、コンベアベルトの復路が支点プーリの周面下部の近傍を通過するように構成されている。
【0010】
具体的には、クラウンローラ状に形成される修正プーリのプーリ軸の一方が、駆動部フレームに形成した長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、蛇行調整機構が、他方のプーリ軸を受け止める調整ねじと、駆動部フレームに固定されて調整ねじがねじ込まれる雌ねじ体とを含むものとすることができる。
【0011】
より具体的には、駆動プーリで送り駆動されたコンベアベルトを始端プーリへ向かって変向案内するテンションプーリが、駆動プーリの近傍に配置されており、テンションプーリは、駆動部フレームに設けたテンション溝に沿ってスライド自在に支持されて、テンションばねでコンベアベルトを緊張する向きに移動付勢してある。
【発明の効果】
【0012】
本発明に係るコンベア装置では、コンベアフレームの全揺動角度範囲内において、1個の修正プーリでコンベアベルトの蛇行を修正できるようにした。これによれば、従来は2個必要であった修正プーリを1個に削減できるので、駆動プーリの周辺構造を簡素化してコンベア装置の低コスト化を実現することができる。更に、修正プーリを1個にしたことで、コンベアベルトの屈曲位置が統一されるので、搬送面の傾斜角度の変更によるコンベアベルトの張力のバランスが変化するのを防止して、コンベア装置の信頼性の向上を実現することができる。
【0013】
修正プーリの配置が下方寄りであると、コンベアフレームが上方揺動限界に位置する状態において、修正プーリとの接触部におけるコンベアベルトの屈折角度が180°に近くなる。この場合は、修正プーリとコンベアベルトの接触面積が小さくなって、修正プーリの機能を発揮させるのが困難になる。これに対し、本発明のように、修正プーリを支点プーリの近傍で下方に配置して、コンベアフレームが上方揺動限界に位置する状態において、コンベアベルトの復路が支点プーリの周面下部の近傍を通過するようにしていると、修正プーリとコンベアベルトの接触面積を充分に大きくとることができるので、修正プーリの機能を確実に発揮させることができる。
【0014】
修正プーリのプーリ軸の一方が長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、蛇行調整機構が、他方のプーリ軸を受け止める調整ねじと、調整ねじがねじ込まれる雌ねじ体とを含むものとしていると、コンベアベルトがいずれの側に蛇行しても、調整ねじを回転操作するだけで蛇行を修正できる。また、コンベアベルトが一方のプーリ軸側に蛇行した場合と、他方のプーリ軸側に蛇行した場合とでは、調整ねじの回転方向が異なるだけであり、同じ調整ねじを共通して使用できる。つまり、操作部分を1箇所に集中させたので、各プーリ軸にそれぞれ蛇行調整機構を設ける場合に比べて、修正プーリの周辺構造を大幅に簡素化できる。
【0015】
テンションプーリがテンション溝に沿ってスライド自在に支持されて、テンションばねでコンベアベルトを緊張する向きに移動付勢してあると、コンベアフレームの揺動変位によりコンベアベルトの緊張力が変化する場合に、テンションローラがスライド変位することで緊張力の変化分を吸収できるので、コンベアベルトの緊張力を常に一定に維持することができる。これにより、搬送対象を常に安定した状態で搬送することが可能となる。
【発明を実施するための最良の形態】
【0016】
図1から図4に、本発明に係るコンベア装置の実施形態を示す。このコンベア装置は、図2に示すように、搬送始端に配置される始端プーリ1と、搬送終端に配置される終端プーリ2と、両プーリ1・2の中途部下方に配置される駆動プーリ3と、これら3個のプーリ1〜3に巻き掛けられるコンベアベルト(以下、単にベルトと記す)4などで構成してある。駆動プーリ3は、モータ5からの動力を受けて回転駆動することで、ベルト4を送り駆動する。図2において搬送対象は左方から右方へ搬送されており、始端プーリ1側において隣接するコンベア装置70から搬送されてきた搬送対象は、ベルト4の上面に受け渡されて該ベルト4上を進み、終端プーリ2側において隣接する上下一対のコンベア装置80・90のいずれかに搬出される。
【0017】
始端プーリ1と終端プーリ2の間の往路の内面には、支点プーリ7が配置してある。この支点プーリ7は、駆動プーリ3よりも搬送方向終端寄りに位置しており、搬送面が下り傾斜するときにベルト4を受け止めることができる(図1(b)参照)。支点プーリ7と終端プーリ2は一対のコンベアフレーム8・8で軸支してあり、コンベアフレーム8は操作シリンダ(チルト機構)9により支持してある。操作シリンダ9はシリンダバレル10およびピストンロッド11を備えており、シリンダバレル10の下端部が、床面に固定したベース12に対して揺動変位可能に連結されるとともに、ピストンロッド11の上端部が、コンベアフレーム8に対して揺動変位可能に連結されている。
【0018】
ピストンロッド11を出退操作すると、図1に示すように、コンベアフレーム8が支点プーリ7の中心軸の回りに上下に揺動する。図1(a)は、コンベアフレーム8の上方揺動限界を示しており、このときベルト4の往路は水平になる。終端プーリ2は上段のコンベア装置80に指向しており、ベルト4の往路上を搬送される搬送対象は該コンベア装置80に受け渡される。
【0019】
コンベアフレーム8が上方揺動限界に位置する状態からピストンロッド11を退入操作すると、コンベアフレーム8は下方に揺動して、図1(b)に示す下方揺動限界に至る。このときベルト4の往路は、支点プーリ7から終端プーリ2にわたって下り傾斜している。終端プーリ2は下段のコンベア装置90に指向しており、ベルト4の往路上を搬送される搬送対象は該コンベア装置90に受け渡される。このように本実施形態では、操作シリンダ9によりコンベアフレーム8を上下に揺動操作して、ベルト4の往路の傾斜角度を変化させることで、搬送対象の搬出先となるコンベア装置を上下に変更できる。
【0020】
図1に示すように、駆動プーリ3の近傍には、ベルト4の蛇行を修正する1個の修正プーリ15と、ベルト4を緊張させるテンションプーリ16とが配置してあり、これら3つのプーリ3・15・16とモータ5などでベルト4の駆動部17を構成してある。また、修正プーリ15およびテンションプーリ16は一対の駆動部フレーム18・18で軸支してある。
【0021】
テンションプーリ16は、図3に示すように、駆動プーリ3で送り駆動されたベルト4を始端プーリ1へ向かって変向案内している。テンションプーリ16は、駆動部フレーム18・18に設けたテンション溝19・19に沿ってスライド自在に支持してあり、更にベルト4が緊張する向きにテンションばね20で移動付勢してある。このように構成したテンションプーリ16によれば、コンベアフレーム8の揺動変位によりベルト4の緊張力が変化する場合に、テンションローラ16がスライド変位することで緊張力の変化分を吸収できるので、ベルト4の緊張力を常に一定に維持することができる。
【0022】
修正プーリ15は、図3および図4に示すように、径寸法が均一の中央部および先窄まり状の両端部を備えるクラウンローラ状に形成してあり、両端部のそれぞれにプーリ軸23・24が固定してある。このうち一方のプーリ軸23は、一方の駆動部フレーム18に開設された長穴26を貫通した状態で外側からナット27をねじ込まれることで、該駆動部フレーム18に対して固定してある。したがってプーリ軸23は、ナット27との螺合部を中心として、長穴26の長さの範囲内において僅かに傾動することができる。
【0023】
他方のプーリ軸24は、先端部にビス29が固定してあり、該ビス29が蛇行調整機構30で受け止められている。ビス29は頭部31および軸部32を備えており、軸部32の先端半部がプーリ軸24内に埋没されている。軸部32のプーリ軸24からの突出部分が、他方の駆動部フレーム18に開設された長穴33を貫通しており、頭部31は該駆動部フレーム18の外側に露出している。なお、プーリ軸24用の長穴33は、プーリ軸23用の長穴26よりも長くなるように形成してある。したがってプーリ軸24は、図4に想像線で示すように、プーリ軸23よりも大きな幅で傾動することができる。
【0024】
蛇行調整機構30は、ビス29を介してプーリ軸24を受け止める調整ねじ35と、調整ねじ35がねじ込まれるナット(雌ねじ体)36とを備えており、ナット36はブラケット37を介して駆動部フレーム18の外面に固定してある。調整ねじ35を回転操作することで、ナット36から調整ねじ35の頭部38までの距離を大小に変更できる。
【0025】
上記の修正プーリ15を用いたベルト4の蛇行修正操作について説明する。ベルト4が修正プーリ15の傾動先端側(プーリ軸24側)に蛇行した場合には、頭部38がナット36から離れる方向に調整ねじ35を回転操作する。これにより、プーリ軸24に固定したビス29が調整ねじ35の頭部38に押されて、修正プーリ15が図4の矢印a方向に揺動変位する。この修正プーリ15の揺動変位により、ベルト4と修正プーリ15の接触部分において、傾動先端側におけるベルト4の張力が、傾動中心側(プーリ軸23側)における張力よりも大きくなることから、ベルト4の傾動中心側への移動が促されて、ベルト4の蛇行が修正される。
【0026】
逆に、ベルト4が修正プーリ15の傾動中心側(プーリ軸23側)に蛇行した場合には、頭部38がナット36に近付く方向に調整ねじ35を回転操作する。修正プーリ15は、ベルト4に圧接することで、ベルト4から離れる方向に力を受けているので、頭部38がナット36に近付けば、修正プーリ15はその分だけ矢印b方向に傾動変位する。この修正プーリ15の揺動変位により、ベルト4と修正プーリ15の接触部分において、傾動先端側(プーリ軸24側)におけるベルト4の張力が、傾動中心側における張力よりも小さくなることから、ベルト4の傾動先端側への移動が促されて、ベルト4の蛇行が修正される。
【0027】
本実施形態に係る修正プーリ15は、その配置に特徴を有する。すなわち、修正プーリ15は、コンベアフレーム8の全揺動角度範囲内において、ベルト4の復路を駆動プーリ3へ向かって変向案内できる位置に配置されている。具体的には、コンベアフレーム8が上方揺動限界に位置する図1(a)の状態において、修正プーリ15の外周面の少なくとも一部が、終端プーリ2の断面と駆動プーリ3の断面との共通外接線40より上側に位置するように、修正プーリ15を配置する。この共通外接線40は、両プーリ2・3の断面の間に引くことができる2本の共通外接線のうち下側のものであり、図1(a)に一点鎖線で示した。このように、コンベアフレーム8が上方揺動限界に位置するときに修正プーリ15がベルト4を変向案内できるようにすることで、コンベアフレーム8の全揺動角度範囲内において修正プーリ15がベルト4を変向案内できる。このように配置した修正プーリ15は、コンベアフレーム8の姿勢に関係なく常にベルト4の蛇行を修正することができる。
【0028】
図1に示すように、コンベアフレーム8が上方揺動限界に位置する(a)の状態と、下方揺動限界に位置する(b)の状態とでは、前者の方が修正プーリ15とベルト4の接触面積が小さくなる。この接触面積が不足すると、修正プーリ15の機能が充分に発揮されなくなるおそれがある。そこで本実施形態では、修正プーリ15を支点プーリ7の近傍下方に配置して、コンベアフレーム8が上方揺動限界に位置するときにベルト4の復路が支点プーリ7の周面下部の近傍を通過するようにした。これにより、修正プーリ15とベルト4の接触面積を充分に大きくとることができるので、修正プーリ15の機能を確実に発揮させることができる。なお、ベルト4が支点プーリ7に接触してしまうと、修正プーリ15がその機能を充分に発揮することができず、本発明の目的を達成することはできなくなる。
【0029】
以上のように、本実施形態に係るコンベア装置においては、コンベアフレーム8の姿勢に関係なく常に1個の修正プーリ15でベルト4の蛇行を修正できるようにした。この構成によれば、従来は2個必要であった修正プーリを1個に削減できるので、駆動プーリ3の周辺構造を簡素化して、コンベア装置の低コスト化を実現することができる。更に、修正プーリを1個にしたことで、ベルト4の屈曲位置が統一されるので、搬送面の傾斜角度の変更によるベルト4の張力のバランスが変化するのを防止して、コンベア装置の信頼性の向上を実現することができる。
【0030】
上記以外に、修正ローラ15は、太鼓型のクラウンローラ状などに形成してあってもよく、その形状は特に限定されるものではない。コンベアフレーム8のチルト機構は操作シリンダ9に限られない。
【図面の簡単な説明】
【0031】
【図1】(a)・(b)は、コンベアベルトの姿勢変位を説明する図である。
【図2】コンベア装置の全体構成を示す正面図である。
【図3】コンベア装置の要部の正面図である。
【図4】修正プーリの構成を示す、図3のA−A線断面図である。
【図5】従来のコンベア装置におけるベルトの姿勢変位を説明する図である。
【符号の説明】
【0032】
1 始端プーリ
2 終端プーリ
3 駆動プーリ
4 コンベアベルト
7 支点プーリ
8 コンベアフレーム
9 操作シリンダ(チルト機構)
15 修正プーリ
16 テンションプーリ
19 テンション溝
20 テンションばね
23 プーリ軸
24 プーリ軸
30 蛇行調整機構
35 調整ねじ
36 ナット(雌ねじ体)
【特許請求の範囲】
【請求項1】
コンベアベルトの搬送始端に配置される始端プーリと、
前記コンベアベルトの搬送終端に配置される終端プーリと、
前記コンベアベルトの往路の内面に配置される支点プーリと、
前記コンベアベルトの復路の内面に配置されて、前記コンベアベルトを送り駆動する駆動プーリと、
前記支点プーリと前記終端プーリを回転自在に軸支するコンベアフレームと、
前記コンベアフレームを、前記支点プーリの中心軸の回りに上下に揺動操作するチルト機構とを備えており、
前記コンベアベルトの蛇行を修正する修正プーリが、前記コンベアフレームの全揺動角度範囲内において、前記コンベアベルトの復路を前記駆動プーリへ向かって変向案内できる位置に配置されており、
前記コンベアフレームの全揺動角度範囲内において、前記1個の修正プーリで前記コンベアベルトの蛇行を修正できることを特徴とするコンベア装置。
【請求項2】
前記修正プーリが前記支点プーリの近傍で下方に配置されており、
前記コンベアフレームが上方揺動限界に位置する状態において、前記コンベアベルトの復路が前記支点プーリの周面下部の近傍を通過する請求項1記載のコンベア装置。
【請求項3】
クラウンローラ状に形成される前記修正プーリのプーリ軸の一方が、駆動部フレームに形成した長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、
前記蛇行調整機構が、前記他方のプーリ軸を受け止める調整ねじと、前記駆動部フレームに固定されて前記調整ねじがねじ込まれる雌ねじ体とを含む請求項1または2記載のコンベア装置。
【請求項4】
前記駆動プーリで送り駆動された前記コンベアベルトを前記始端プーリへ向かって変向案内するテンションプーリが、前記駆動プーリの近傍に配置されており、
前記テンションプーリは、前記駆動部フレームに設けたテンション溝に沿ってスライド自在に支持されて、テンションばねで前記コンベアベルトを緊張する向きに移動付勢してある請求項3記載のコンベア装置。
【請求項1】
コンベアベルトの搬送始端に配置される始端プーリと、
前記コンベアベルトの搬送終端に配置される終端プーリと、
前記コンベアベルトの往路の内面に配置される支点プーリと、
前記コンベアベルトの復路の内面に配置されて、前記コンベアベルトを送り駆動する駆動プーリと、
前記支点プーリと前記終端プーリを回転自在に軸支するコンベアフレームと、
前記コンベアフレームを、前記支点プーリの中心軸の回りに上下に揺動操作するチルト機構とを備えており、
前記コンベアベルトの蛇行を修正する修正プーリが、前記コンベアフレームの全揺動角度範囲内において、前記コンベアベルトの復路を前記駆動プーリへ向かって変向案内できる位置に配置されており、
前記コンベアフレームの全揺動角度範囲内において、前記1個の修正プーリで前記コンベアベルトの蛇行を修正できることを特徴とするコンベア装置。
【請求項2】
前記修正プーリが前記支点プーリの近傍で下方に配置されており、
前記コンベアフレームが上方揺動限界に位置する状態において、前記コンベアベルトの復路が前記支点プーリの周面下部の近傍を通過する請求項1記載のコンベア装置。
【請求項3】
クラウンローラ状に形成される前記修正プーリのプーリ軸の一方が、駆動部フレームに形成した長穴で傾動可能に軸支され、他方のプーリ軸が蛇行調整機構で受け止められており、
前記蛇行調整機構が、前記他方のプーリ軸を受け止める調整ねじと、前記駆動部フレームに固定されて前記調整ねじがねじ込まれる雌ねじ体とを含む請求項1または2記載のコンベア装置。
【請求項4】
前記駆動プーリで送り駆動された前記コンベアベルトを前記始端プーリへ向かって変向案内するテンションプーリが、前記駆動プーリの近傍に配置されており、
前記テンションプーリは、前記駆動部フレームに設けたテンション溝に沿ってスライド自在に支持されて、テンションばねで前記コンベアベルトを緊張する向きに移動付勢してある請求項3記載のコンベア装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−249137(P2009−249137A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−100875(P2008−100875)
【出願日】平成20年4月8日(2008.4.8)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月8日(2008.4.8)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]