
コンベア装置
【課題】洗浄性及び発塵性を改善でき、かつメンテナンス性を向上可能なコンベア装置を提供する。
【解決手段】コンベア装置100は、外側側面に形成された開口部11Cと、外側側面に着脱可能に設けられて開口部11Cを閉止する閉止板11Dとを有するコンベアフレーム11と、コンベアフレーム11に回転可能に設けられる駆動回転体12及び従動回転体13と、駆動回転体12と従動回転体13とに巻き回されるとともに、搬送物1を載置可能な載置部14と、駆動回転体12を回転駆動して、載置部14を移動させる駆動源3と、中空状の枠部材によって形成され、コンベアフレーム11を支持する支持部20と、駆動源3の動作を制御する制御部60と、駆動源3の動作制御に利用される電装品3、61、62と、支持部20の内部に配設され、制御部60と電装品3、61、62とを接続する電気配線71〜73と、を備える。
【解決手段】コンベア装置100は、外側側面に形成された開口部11Cと、外側側面に着脱可能に設けられて開口部11Cを閉止する閉止板11Dとを有するコンベアフレーム11と、コンベアフレーム11に回転可能に設けられる駆動回転体12及び従動回転体13と、駆動回転体12と従動回転体13とに巻き回されるとともに、搬送物1を載置可能な載置部14と、駆動回転体12を回転駆動して、載置部14を移動させる駆動源3と、中空状の枠部材によって形成され、コンベアフレーム11を支持する支持部20と、駆動源3の動作を制御する制御部60と、駆動源3の動作制御に利用される電装品3、61、62と、支持部20の内部に配設され、制御部60と電装品3、61、62とを接続する電気配線71〜73と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送物を搬送するコンベア装置に関する。
【背景技術】
【0002】
特許文献1及び特許文献2には、コンベアフレームに設置される駆動スプロケット及び従動スプロケットと、これらスプロケットに巻き回されるチェーンと、駆動スプロケットを駆動する駆動モータとを備え、駆動モータによって駆動スプロケットを回転駆動することで、チェーン上に載置された搬送物を搬送するコンベア装置が開示されている。
【0003】
このようなコンベア装置を医薬品等の製造工程において使用する場合には、衛生上の観点から、定期的にコンベア装置の清掃を行う必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−128250号公報
【特許文献2】特開平11−263421号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のようなコンベア装置では、駆動モータ等の電装品に接続する電気配線は、一般的にコンベアフレームに沿って外部に配設される。そのため、コンベア装置を水洗浄する場合には、電気配線が濡れないようにコンベアフレームを一度分解する等の作業が必要となり、コンベア装置の水洗いがし難く、洗浄性が悪いという問題があった。また、電気配線上に溜まった埃や塵等は除去し難く、駆動モータ作動時に溜まった塵や埃等が舞い上がるおそれがある。このように上記したコンベア装置は発塵しやすい構造となっていた。
【0006】
特許文献2に記載のコンベア装置では、コンベアフレーム内に電気配線を配設しているが、コンベアフレームはローラを支持する側面板によってフレームカバーの内側側面を閉止する構成となっており、コンベアフレーム内の清掃にはコンベアフレームを分解する必要があり、コンベアフレームに設けられるローラ等のメンテナンス性が悪いという問題がある。
【0007】
そこで、本発明は、上記の問題点に鑑みてなされたものであり、洗浄性及び発塵性を改善でき、かつメンテナンス性を向上可能なコンベア装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、搬送物を搬送するコンベア装置において、外側側面に形成された開口部と、外側側面に着脱可能に設けられて開口部を閉止する閉止板とを有するコンベアフレームと、コンベアフレームに回転可能に設けられる駆動回転体及び従動回転体と、駆動回転体と従動回転体とに巻き回されるとともに、搬送物を載置可能な載置部と、駆動回転体を回転駆動して、載置部を移動させる駆動源と、中空状の枠部材によって形成され、コンベアフレームを支持する支持部と、駆動源の動作を制御する制御部と、駆動源の動作制御に利用される電装品と、支持部の内部に配設され、制御部と電装品とを接続する電気配線と、を備える。
【発明の効果】
【0009】
本発明によれば、電装品と接続する電気配線が支持部の内部に配設されるので、コンベア装置を水洗浄する場合であっても電気配線は濡れることがない。水洗浄時に電気配線を取り外す必要がないので、コンベア装置の水洗浄が実施しやすくなり、従来よりも洗浄作業工数を低減することができる。また、電気配線上に塵や埃等が堆積することがないので、塵や埃等が舞い上がることがない。さらに、コンベアフレーム内には電気配線は一切配設されていないため、閉止板を取り外すことで、コンベアフレームの内部まで水洗浄することができ、コンベアフレームに設けられる駆動回転体等のメンテナンスも容易に実施することができる。
【0010】
したがって、コンベア装置の洗浄性及び発塵性が改善するとともに、コンベア装置のメンテナンス性も向上する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態におけるコンベア装置の側面図である。
【図2】コンベア装置の平面図である。
【図3】搬送方向から見た時のコンベア装置の側面図である。
【図4】駆動モータ近傍の拡大図である。
【図5】他の態様におけるコンベア装置の側面図である。
【発明を実施するための形態】
【0012】
図1〜図4を参照して、本発明の実施形態によるコンベア装置100の構成について説明する。
【0013】
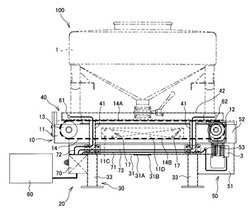
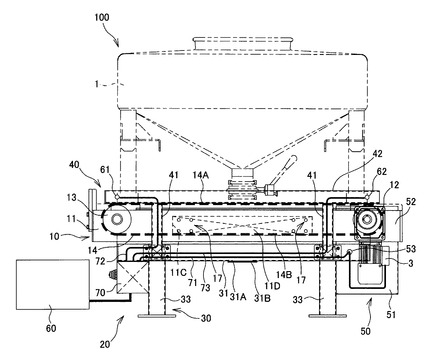
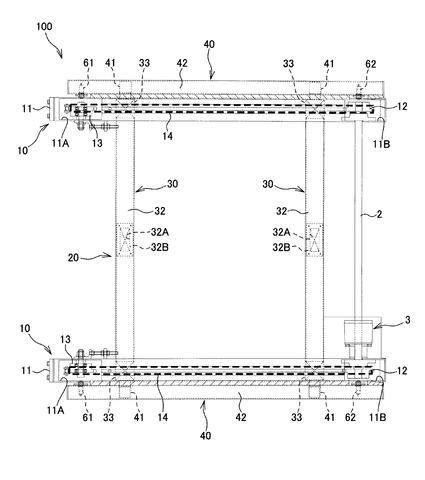
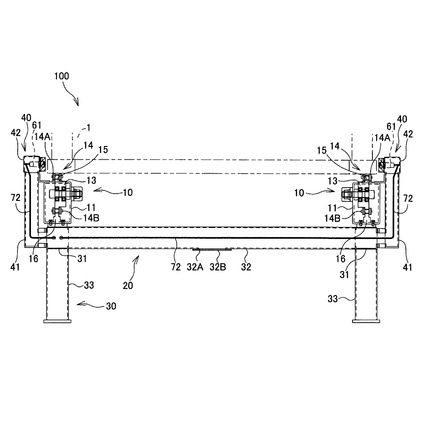
図1は、搬送方向に直交する方向から見た時のコンベア装置100の側面図である。図2は、コンベア装置100の平面図である。図3は、搬送方向から見た時のコンベア装置100の側面図である。図4は、駆動モータ3近傍の拡大図である。なお、図1において、左側がコンベア装置100の前方となり、左右方向がコンベア装置100の搬送方向となる。
【0014】
コンベア装置100は、薬剤製造装置によって製造された薬剤を貯蔵する受容器(搬送物)1を搬送する搬送装置である。
【0015】
図1に示すように、コンベア装置100は、受容器1を搬送する搬送部10と、搬送部10を水平に支持する支持部20と、を備える。
【0016】
搬送部10は、コンベアフレーム11と、コンベアフレーム11の後端部に設けられる駆動スプロケット(駆動回転体)12と、コンベアフレーム11の前端部に設けられる従動スプロケット(従動回転体)13と、駆動スプロケット12と従動スプロケット13とに巻き回されるとともに受容器1を載置可能なチェーン(載置部)14とを備える。
【0017】
図2に示すように、コンベアフレーム11は、搬送方向に延設された中空状の矩形枠部材によって形成されている。コンベアフレーム11は一対設けられ、これらコンベアフレーム11は平行に配置される。コンベアフレーム11の前端部及び後端部には上下方向に貫通する貫通孔11A、11Bが形成されている。
【0018】
また、図1に示すように、コンベアフレーム11の外側側面には、搬送方向に沿って矩形状の開口部11Cが形成されている。この開口部11Cは、閉止板11Dによって閉止される。閉止板11Dは、ローレットつまみを有する複数のネジ17を介して、コンベアフレーム11の側面に着脱可能に取り付けられる。ローレットつまみを有するネジ17を用いているので、工具を使用することなく閉止板11Dをコンベアフレーム11に着脱することができる。この閉止板11Dは、コンベアフレーム11内を水洗浄する場合や内部点検の際に取り外される。なお、コンベアフレーム11の内部を洗浄した水は、コンベアフレーム11の貫通孔11A、11Bを介して外部に排出される。
【0019】
図1及び図2に示すように、駆動スプロケット12は、貫通孔11Bが設けられる位置であって、コンベアフレーム11の内部に回転自在に設置される。駆動スプロケット12は、スプロケット上部がコンベアフレーム11の貫通孔11Bから上方に露出するように設けられる。各コンベアフレーム11に設けられる駆動スプロケット12は、一本の駆動軸2によって連結されている。駆動軸2は後述する駆動モータ3によって回転駆動され、一対の駆動スプロケット12は同期して回転する。
【0020】
図2及び図3に示すように、従動スプロケット13は、貫通孔11Aが設けられる位置であって、コンベアフレーム11の内部に回転自在に設置される。従動スプロケット13は、スプロケット上部がコンベアフレーム11の貫通孔11Aから上方に露出するように設けられる。この従動スプロケット13は、駆動スプロケット12の回転に伴って回転する。
【0021】
図3に示すように、駆動スプロケット12と従動スプロケット13とに巻き回されるチェーン14は、無端チェーンである。チェーン14の上部14Aは、コンベアフレーム11の上面に設置された樹脂製のガイド15を介して、コンベアフレーム11の上面に沿って移動可能に配設される。チェーン14の下部14Bは、コンベアフレーム11の内部底面に設置された樹脂製のガイド16を介して、コンベアフレーム11の内部底面に沿って移動可能に配設される。
【0022】
次に、搬送部10を支持する支持部20について説明する。
【0023】
図1及び図3に示すように、支持部20は、コンベアフレーム11を下側から支えるコンベア架台30と、コンベア架台30に設けられ、搬送される受容器1を誘導する誘導部40とを備える。
【0024】
図2及び図3に示すように、コンベア架台30は、中空状の矩形枠部材である角パイプによって形成されている。コンベア架台30は、搬送方向に延設された一対の直線桟31と、一対の直線桟31が平行となるように直線桟31同士を連結する一対の連結桟32と、直線桟31が水平となるように直線桟31の前端部及び後端部に設けられる脚部33とを備える。
【0025】
直線桟31と連結桟32の内部は接続部分を介して相互に連通しており、直線桟31と脚部33の内部は接続部分を介して相互に連通している。直線桟31の上面には、搬送部10のコンベアフレーム11が載置される。直線桟31には、搬送時の受容器1を誘導する誘導部40が設置される。
【0026】
誘導部40は、中空状の矩形枠部材である角パイプによって形成されている。誘導部40は、直線桟31の前端部及び後端部に形成されるアーム41と、これらアーム41の上部に設けられるとともに搬送方向に延設されるガイド42とを備える。
【0027】
アーム41は、直線桟31の外側側面からコンベアフレーム11の側方を通ってコンベアフレーム11よりも高い位置まで延設される。直線桟31とアーム41の内部は接続部分を介して相互に連通しており、アーム41とガイド42の内部は接続部分を介して相互に連通している。受容器1は、各直線桟31にそれぞれ設けられたガイド42の間のチェーン14に載置され、搬送時にはガイド42に案内されながら移動する。
【0028】
次に、図1及び図4を参照して、駆動スプロケット12を回転駆動する駆動モータ3について説明する。
【0029】
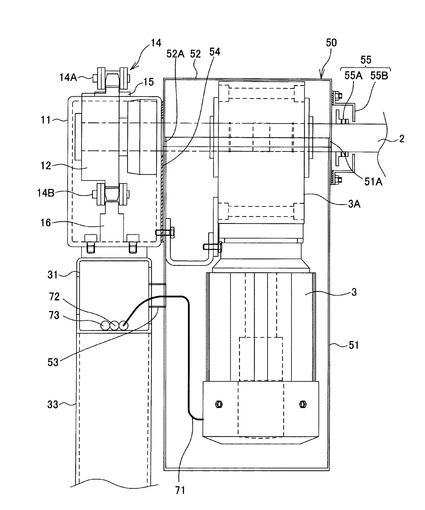
駆動モータ3は、収容箱50内に収容された状態で、一方のコンベアフレーム11の後端部に設置される。駆動モータ3は、減速機構3Aを有しており、この減速機構3Aを介して駆動軸2に連結する。
【0030】
収容箱50は、駆動モータ3の下部を収容可能に形成された収容部51と、収容部51の上部に設けられ、駆動モータ3の上部を収容する蓋部52とから構成されている。蓋部52は、蓋部52の下端内周部52Aが収容部51の上端外周部51Aに嵌合することで、収容部51に固定される。収容部51は、ボルトによって一方のコンベアフレーム11の内側側面に固定される。
【0031】
収容箱50の収容部51と収容箱50が設置された側の直線桟31との間には、連通管(連通部)53が配設される。この連通管53を介して、収容箱50と直線桟31の内部は連通している。
【0032】
駆動軸2は、蓋部52と収容部51との嵌合部分及びコンベアフレーム11の内側側面を貫通した状態で、一対の駆動スプロケット12に連結している。駆動軸2が貫通する部分には、シール部材54、55が設けられる。シール部材54は、コンベアフレーム11と収容箱50との間において、駆動軸2の周囲を取り囲むように設けられる。シール部材55は、駆動軸2に外嵌された円板フランジ55Aを収容箱50の蓋部52に設置されたカバー部55Bで覆うことで、内部にラビリンス構造を形成している。
【0033】
上記のように駆動モータ3は収容箱50内に収容されているので、コンベア装置100を水洗浄しても、駆動モータ3が水に濡れることがない。駆動モータ3の動作は、外部に配設されたコントローラ60によって制御される。
【0034】
図1に示すコントローラ60は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。
【0035】
コントローラ60は、一方の直線桟31の前端下部に設けられた端子ボックス70と電気的に接続している。コントローラ60と端子ボックス70が制御部を構成している。
【0036】
端子ボックス70は、駆動モータ3と電気的に接続する。端子ボックス70からの電気配線71は、図1に示すように直線桟31の内部を後方に向かって配設され、図4に示すように連通管53を通って収容箱50の内部に導かれて駆動モータ3に接続する。
【0037】
端子ボックス70は、誘導部40のガイド42の前端内部に設けられる第1位置検出センサ61及び誘導部40のガイド42の後端内部に設けられる第2位置検出センサ62と電気的に接続している。これら第1位置検出センサ61及び第2位置検出センサ62は、受容器1の位置を検出するセンサであって、シール部材(図示省略)を介して各ガイド42に設けられる。
【0038】
図1及び図3に示すように、端子ボックス70と各ガイド42にそれぞれ設けられる第1位置検出センサ61は、電気配線72によって接続される。端子ボックス70からの電気配線72は、直線桟31内を後方に向かって配設され、前側の連結桟32が連結する部分で2つに分岐する。分岐した一方の電気配線72はアーム41及びガイド42の内部を通って一方の第1位置検出センサ61に接続し、分岐した他方の電気配線72は前側の連結桟32、アーム41、及びガイド42の内部を通って他方の第1位置検出センサ61に接続する。
【0039】
同様に、端子ボックス70と各ガイド42にそれぞれ設けられる第2位置検出センサ62は、電気配線73によって接続されている。端子ボックス70からの電気配線73は、直線桟31内を後方に向かって配設され、後側の連結桟32が連結する部分で2つに分岐する。分岐した一方の電気配線73はアーム41及びガイド42の内部を通って一方の第2位置検出センサ62に接続し、分岐した他方の電気配線73は後側の連結桟32、アーム41、及びガイド42の内部を通って他方の第2位置検出センサ62に接続する。
【0040】
なお、電気配線71〜73は、図1及び図2に示すように、直線桟31及び連結桟32の下面に形成された点検口31A、32Aを介して配設される。これら点検口31A、32Aは通常、シール部材(図示省略)を介して閉止板31B、32Bによって閉止されている。
【0041】
コントローラ60は、第1位置検出センサ61及び第2位置検出センサ62からの信号等に基づいて、駆動モータ3の動作を制御する。
【0042】
無人搬送台車(図示省略)等からの受容器1の受け入れ時に、第2位置検出センサ62によって受容器1が確認されると、コントローラ60は駆動モータ3を正転駆動させる。駆動モータ3が正転すると、駆動スプロケット12が図1において反時計回りに回転駆動され、チェーン14上に載置された受容器1はガイド42に沿って前方に移動する。第1位置検出センサ61によって受容器1が確認された時点で、コントローラ60は駆動モータ3の動作を停止させて受容器1の移動を止める。
【0043】
これに対して、無人搬送台車等への受容器1の払い出し時に、第1位置検出センサ61によって受容器1が確認されると、コントローラ60は駆動モータ3を逆転駆動させる。駆動モータ3が逆転すると、駆動スプロケット12が図1において時計回りに回転駆動され、チェーン14上に載置された受容器1はガイド42に沿って後方に移動する。受容器1が無人搬送台車等へ積み込まれ、第2位置検出センサ62によって受容器1が確認されなくなった時点で、コントローラ60は駆動モータ3の動作を停止させる。
【0044】
上記したコンベア装置100によれば、以下の効果を得ることができる。
【0045】
コンベア装置100では、搬送部10の動作制御に利用される駆動モータ3や第1位置検出センサ61、第2位置検出センサ62等の電装品とコントローラ60とを電気的に接続する電気配線71〜73が、直線桟31や連結桟32、アーム41、ガイド42の内部に配設される。また、コンベアフレーム11には、コンベアフレーム11の外側側面に形成された開口部11Cを閉止する閉止板11Dが着脱可能に設けられている。
【0046】
したがって、コンベア装置100を水洗浄する場合であっても電気配線71〜73が濡れることがなく、水洗浄時に電気配線71〜73を取り外す必要がないので、従来よりもコンベア装置100の水洗浄作業工数を低減することができる。また、電気配線71〜73上に塵や埃等が堆積することがなく、駆動モータ3が作動しても塵や埃等が舞い上がることがない。さらに、コンベアフレーム11内には電気配線71〜73等は一切配設されていないため、閉止板11Dを取り外すことで、コンベアフレーム11の内部まで容易に水洗浄することができ、コンベアフレーム11内に設けられる駆動スプロケット12や従動スプロケット13等のメンテナンスも容易に実施することができる。これにより、コンベア装置100の洗浄性及び発塵性が改善するとともに、コンベア装置100のメンテナンス性も向上する。
【0047】
駆動モータ3は収容箱50に収容されているため、コンベア装置100を水洗浄しても駆動モータ3が濡れることがない。したがって、駆動モータ3を設置した状態でコンベア装置100の水洗浄を実施でき、コンベア装置100の洗浄性をより改善することが可能となる。
【0048】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0049】
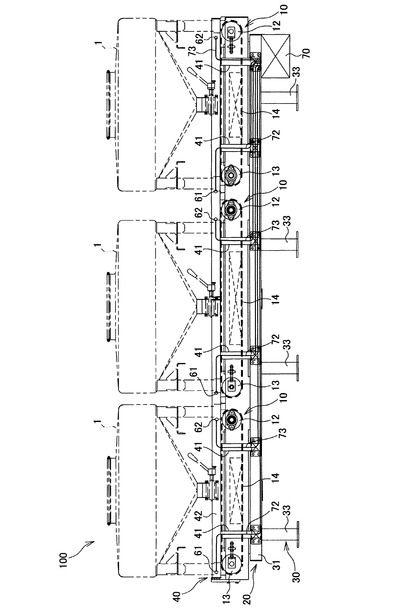
コンベア装置100は1つの搬送部10を1つの支持部20で支持するが、これに限定されるものではない。例えば、コンベア装置100は、図5に示すように、搬送方向に複数(図5において3つ)連設される搬送部10を1つの支持部20によって支持するように構成してもよい。
【0050】
コンベア装置100は、医薬品分野における薬剤を搬送する装置としたが、化学品や食料品等を搬送する装置としてもよい。
【0051】
また、コンベア装置100では、駆動スプロケット12及び従動スプロケット13に、チェーン14を巻き回しているが、チェーン14に変えてベルトを巻き回してもよい。
【0052】
さらに、コンベア装置100では、コントローラ60を外部に配置するようにしたが、端子ボックス70内に収容するようにしてもよい。
【産業上の利用可能性】
【0053】
本発明は、搬送物を搬送するチェーンコンベアやベルトコンベア等のコンベア装置に適用することが可能である。
【符号の説明】
【0054】
100 コンベア装置
1 受容器
3 駆動モータ
10 搬送部
11 コンベアフレーム
11C 開口部
11D 閉止板
12 駆動スプロケット
13 従動スプロケット
14 チェーン
20 支持部
30 コンベア架台
40 誘導部
50 収容箱
60 コントローラ
61 第1位置検出センサ
62 第2位置検出センサ
70 端子ボックス
71 電気配線
72 電気配線
73 電気配線
【技術分野】
【0001】
本発明は、搬送物を搬送するコンベア装置に関する。
【背景技術】
【0002】
特許文献1及び特許文献2には、コンベアフレームに設置される駆動スプロケット及び従動スプロケットと、これらスプロケットに巻き回されるチェーンと、駆動スプロケットを駆動する駆動モータとを備え、駆動モータによって駆動スプロケットを回転駆動することで、チェーン上に載置された搬送物を搬送するコンベア装置が開示されている。
【0003】
このようなコンベア装置を医薬品等の製造工程において使用する場合には、衛生上の観点から、定期的にコンベア装置の清掃を行う必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−128250号公報
【特許文献2】特開平11−263421号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のようなコンベア装置では、駆動モータ等の電装品に接続する電気配線は、一般的にコンベアフレームに沿って外部に配設される。そのため、コンベア装置を水洗浄する場合には、電気配線が濡れないようにコンベアフレームを一度分解する等の作業が必要となり、コンベア装置の水洗いがし難く、洗浄性が悪いという問題があった。また、電気配線上に溜まった埃や塵等は除去し難く、駆動モータ作動時に溜まった塵や埃等が舞い上がるおそれがある。このように上記したコンベア装置は発塵しやすい構造となっていた。
【0006】
特許文献2に記載のコンベア装置では、コンベアフレーム内に電気配線を配設しているが、コンベアフレームはローラを支持する側面板によってフレームカバーの内側側面を閉止する構成となっており、コンベアフレーム内の清掃にはコンベアフレームを分解する必要があり、コンベアフレームに設けられるローラ等のメンテナンス性が悪いという問題がある。
【0007】
そこで、本発明は、上記の問題点に鑑みてなされたものであり、洗浄性及び発塵性を改善でき、かつメンテナンス性を向上可能なコンベア装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、搬送物を搬送するコンベア装置において、外側側面に形成された開口部と、外側側面に着脱可能に設けられて開口部を閉止する閉止板とを有するコンベアフレームと、コンベアフレームに回転可能に設けられる駆動回転体及び従動回転体と、駆動回転体と従動回転体とに巻き回されるとともに、搬送物を載置可能な載置部と、駆動回転体を回転駆動して、載置部を移動させる駆動源と、中空状の枠部材によって形成され、コンベアフレームを支持する支持部と、駆動源の動作を制御する制御部と、駆動源の動作制御に利用される電装品と、支持部の内部に配設され、制御部と電装品とを接続する電気配線と、を備える。
【発明の効果】
【0009】
本発明によれば、電装品と接続する電気配線が支持部の内部に配設されるので、コンベア装置を水洗浄する場合であっても電気配線は濡れることがない。水洗浄時に電気配線を取り外す必要がないので、コンベア装置の水洗浄が実施しやすくなり、従来よりも洗浄作業工数を低減することができる。また、電気配線上に塵や埃等が堆積することがないので、塵や埃等が舞い上がることがない。さらに、コンベアフレーム内には電気配線は一切配設されていないため、閉止板を取り外すことで、コンベアフレームの内部まで水洗浄することができ、コンベアフレームに設けられる駆動回転体等のメンテナンスも容易に実施することができる。
【0010】
したがって、コンベア装置の洗浄性及び発塵性が改善するとともに、コンベア装置のメンテナンス性も向上する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態におけるコンベア装置の側面図である。
【図2】コンベア装置の平面図である。
【図3】搬送方向から見た時のコンベア装置の側面図である。
【図4】駆動モータ近傍の拡大図である。
【図5】他の態様におけるコンベア装置の側面図である。
【発明を実施するための形態】
【0012】
図1〜図4を参照して、本発明の実施形態によるコンベア装置100の構成について説明する。
【0013】
図1は、搬送方向に直交する方向から見た時のコンベア装置100の側面図である。図2は、コンベア装置100の平面図である。図3は、搬送方向から見た時のコンベア装置100の側面図である。図4は、駆動モータ3近傍の拡大図である。なお、図1において、左側がコンベア装置100の前方となり、左右方向がコンベア装置100の搬送方向となる。
【0014】
コンベア装置100は、薬剤製造装置によって製造された薬剤を貯蔵する受容器(搬送物)1を搬送する搬送装置である。
【0015】
図1に示すように、コンベア装置100は、受容器1を搬送する搬送部10と、搬送部10を水平に支持する支持部20と、を備える。
【0016】
搬送部10は、コンベアフレーム11と、コンベアフレーム11の後端部に設けられる駆動スプロケット(駆動回転体)12と、コンベアフレーム11の前端部に設けられる従動スプロケット(従動回転体)13と、駆動スプロケット12と従動スプロケット13とに巻き回されるとともに受容器1を載置可能なチェーン(載置部)14とを備える。
【0017】
図2に示すように、コンベアフレーム11は、搬送方向に延設された中空状の矩形枠部材によって形成されている。コンベアフレーム11は一対設けられ、これらコンベアフレーム11は平行に配置される。コンベアフレーム11の前端部及び後端部には上下方向に貫通する貫通孔11A、11Bが形成されている。
【0018】
また、図1に示すように、コンベアフレーム11の外側側面には、搬送方向に沿って矩形状の開口部11Cが形成されている。この開口部11Cは、閉止板11Dによって閉止される。閉止板11Dは、ローレットつまみを有する複数のネジ17を介して、コンベアフレーム11の側面に着脱可能に取り付けられる。ローレットつまみを有するネジ17を用いているので、工具を使用することなく閉止板11Dをコンベアフレーム11に着脱することができる。この閉止板11Dは、コンベアフレーム11内を水洗浄する場合や内部点検の際に取り外される。なお、コンベアフレーム11の内部を洗浄した水は、コンベアフレーム11の貫通孔11A、11Bを介して外部に排出される。
【0019】
図1及び図2に示すように、駆動スプロケット12は、貫通孔11Bが設けられる位置であって、コンベアフレーム11の内部に回転自在に設置される。駆動スプロケット12は、スプロケット上部がコンベアフレーム11の貫通孔11Bから上方に露出するように設けられる。各コンベアフレーム11に設けられる駆動スプロケット12は、一本の駆動軸2によって連結されている。駆動軸2は後述する駆動モータ3によって回転駆動され、一対の駆動スプロケット12は同期して回転する。
【0020】
図2及び図3に示すように、従動スプロケット13は、貫通孔11Aが設けられる位置であって、コンベアフレーム11の内部に回転自在に設置される。従動スプロケット13は、スプロケット上部がコンベアフレーム11の貫通孔11Aから上方に露出するように設けられる。この従動スプロケット13は、駆動スプロケット12の回転に伴って回転する。
【0021】
図3に示すように、駆動スプロケット12と従動スプロケット13とに巻き回されるチェーン14は、無端チェーンである。チェーン14の上部14Aは、コンベアフレーム11の上面に設置された樹脂製のガイド15を介して、コンベアフレーム11の上面に沿って移動可能に配設される。チェーン14の下部14Bは、コンベアフレーム11の内部底面に設置された樹脂製のガイド16を介して、コンベアフレーム11の内部底面に沿って移動可能に配設される。
【0022】
次に、搬送部10を支持する支持部20について説明する。
【0023】
図1及び図3に示すように、支持部20は、コンベアフレーム11を下側から支えるコンベア架台30と、コンベア架台30に設けられ、搬送される受容器1を誘導する誘導部40とを備える。
【0024】
図2及び図3に示すように、コンベア架台30は、中空状の矩形枠部材である角パイプによって形成されている。コンベア架台30は、搬送方向に延設された一対の直線桟31と、一対の直線桟31が平行となるように直線桟31同士を連結する一対の連結桟32と、直線桟31が水平となるように直線桟31の前端部及び後端部に設けられる脚部33とを備える。
【0025】
直線桟31と連結桟32の内部は接続部分を介して相互に連通しており、直線桟31と脚部33の内部は接続部分を介して相互に連通している。直線桟31の上面には、搬送部10のコンベアフレーム11が載置される。直線桟31には、搬送時の受容器1を誘導する誘導部40が設置される。
【0026】
誘導部40は、中空状の矩形枠部材である角パイプによって形成されている。誘導部40は、直線桟31の前端部及び後端部に形成されるアーム41と、これらアーム41の上部に設けられるとともに搬送方向に延設されるガイド42とを備える。
【0027】
アーム41は、直線桟31の外側側面からコンベアフレーム11の側方を通ってコンベアフレーム11よりも高い位置まで延設される。直線桟31とアーム41の内部は接続部分を介して相互に連通しており、アーム41とガイド42の内部は接続部分を介して相互に連通している。受容器1は、各直線桟31にそれぞれ設けられたガイド42の間のチェーン14に載置され、搬送時にはガイド42に案内されながら移動する。
【0028】
次に、図1及び図4を参照して、駆動スプロケット12を回転駆動する駆動モータ3について説明する。
【0029】
駆動モータ3は、収容箱50内に収容された状態で、一方のコンベアフレーム11の後端部に設置される。駆動モータ3は、減速機構3Aを有しており、この減速機構3Aを介して駆動軸2に連結する。
【0030】
収容箱50は、駆動モータ3の下部を収容可能に形成された収容部51と、収容部51の上部に設けられ、駆動モータ3の上部を収容する蓋部52とから構成されている。蓋部52は、蓋部52の下端内周部52Aが収容部51の上端外周部51Aに嵌合することで、収容部51に固定される。収容部51は、ボルトによって一方のコンベアフレーム11の内側側面に固定される。
【0031】
収容箱50の収容部51と収容箱50が設置された側の直線桟31との間には、連通管(連通部)53が配設される。この連通管53を介して、収容箱50と直線桟31の内部は連通している。
【0032】
駆動軸2は、蓋部52と収容部51との嵌合部分及びコンベアフレーム11の内側側面を貫通した状態で、一対の駆動スプロケット12に連結している。駆動軸2が貫通する部分には、シール部材54、55が設けられる。シール部材54は、コンベアフレーム11と収容箱50との間において、駆動軸2の周囲を取り囲むように設けられる。シール部材55は、駆動軸2に外嵌された円板フランジ55Aを収容箱50の蓋部52に設置されたカバー部55Bで覆うことで、内部にラビリンス構造を形成している。
【0033】
上記のように駆動モータ3は収容箱50内に収容されているので、コンベア装置100を水洗浄しても、駆動モータ3が水に濡れることがない。駆動モータ3の動作は、外部に配設されたコントローラ60によって制御される。
【0034】
図1に示すコントローラ60は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。
【0035】
コントローラ60は、一方の直線桟31の前端下部に設けられた端子ボックス70と電気的に接続している。コントローラ60と端子ボックス70が制御部を構成している。
【0036】
端子ボックス70は、駆動モータ3と電気的に接続する。端子ボックス70からの電気配線71は、図1に示すように直線桟31の内部を後方に向かって配設され、図4に示すように連通管53を通って収容箱50の内部に導かれて駆動モータ3に接続する。
【0037】
端子ボックス70は、誘導部40のガイド42の前端内部に設けられる第1位置検出センサ61及び誘導部40のガイド42の後端内部に設けられる第2位置検出センサ62と電気的に接続している。これら第1位置検出センサ61及び第2位置検出センサ62は、受容器1の位置を検出するセンサであって、シール部材(図示省略)を介して各ガイド42に設けられる。
【0038】
図1及び図3に示すように、端子ボックス70と各ガイド42にそれぞれ設けられる第1位置検出センサ61は、電気配線72によって接続される。端子ボックス70からの電気配線72は、直線桟31内を後方に向かって配設され、前側の連結桟32が連結する部分で2つに分岐する。分岐した一方の電気配線72はアーム41及びガイド42の内部を通って一方の第1位置検出センサ61に接続し、分岐した他方の電気配線72は前側の連結桟32、アーム41、及びガイド42の内部を通って他方の第1位置検出センサ61に接続する。
【0039】
同様に、端子ボックス70と各ガイド42にそれぞれ設けられる第2位置検出センサ62は、電気配線73によって接続されている。端子ボックス70からの電気配線73は、直線桟31内を後方に向かって配設され、後側の連結桟32が連結する部分で2つに分岐する。分岐した一方の電気配線73はアーム41及びガイド42の内部を通って一方の第2位置検出センサ62に接続し、分岐した他方の電気配線73は後側の連結桟32、アーム41、及びガイド42の内部を通って他方の第2位置検出センサ62に接続する。
【0040】
なお、電気配線71〜73は、図1及び図2に示すように、直線桟31及び連結桟32の下面に形成された点検口31A、32Aを介して配設される。これら点検口31A、32Aは通常、シール部材(図示省略)を介して閉止板31B、32Bによって閉止されている。
【0041】
コントローラ60は、第1位置検出センサ61及び第2位置検出センサ62からの信号等に基づいて、駆動モータ3の動作を制御する。
【0042】
無人搬送台車(図示省略)等からの受容器1の受け入れ時に、第2位置検出センサ62によって受容器1が確認されると、コントローラ60は駆動モータ3を正転駆動させる。駆動モータ3が正転すると、駆動スプロケット12が図1において反時計回りに回転駆動され、チェーン14上に載置された受容器1はガイド42に沿って前方に移動する。第1位置検出センサ61によって受容器1が確認された時点で、コントローラ60は駆動モータ3の動作を停止させて受容器1の移動を止める。
【0043】
これに対して、無人搬送台車等への受容器1の払い出し時に、第1位置検出センサ61によって受容器1が確認されると、コントローラ60は駆動モータ3を逆転駆動させる。駆動モータ3が逆転すると、駆動スプロケット12が図1において時計回りに回転駆動され、チェーン14上に載置された受容器1はガイド42に沿って後方に移動する。受容器1が無人搬送台車等へ積み込まれ、第2位置検出センサ62によって受容器1が確認されなくなった時点で、コントローラ60は駆動モータ3の動作を停止させる。
【0044】
上記したコンベア装置100によれば、以下の効果を得ることができる。
【0045】
コンベア装置100では、搬送部10の動作制御に利用される駆動モータ3や第1位置検出センサ61、第2位置検出センサ62等の電装品とコントローラ60とを電気的に接続する電気配線71〜73が、直線桟31や連結桟32、アーム41、ガイド42の内部に配設される。また、コンベアフレーム11には、コンベアフレーム11の外側側面に形成された開口部11Cを閉止する閉止板11Dが着脱可能に設けられている。
【0046】
したがって、コンベア装置100を水洗浄する場合であっても電気配線71〜73が濡れることがなく、水洗浄時に電気配線71〜73を取り外す必要がないので、従来よりもコンベア装置100の水洗浄作業工数を低減することができる。また、電気配線71〜73上に塵や埃等が堆積することがなく、駆動モータ3が作動しても塵や埃等が舞い上がることがない。さらに、コンベアフレーム11内には電気配線71〜73等は一切配設されていないため、閉止板11Dを取り外すことで、コンベアフレーム11の内部まで容易に水洗浄することができ、コンベアフレーム11内に設けられる駆動スプロケット12や従動スプロケット13等のメンテナンスも容易に実施することができる。これにより、コンベア装置100の洗浄性及び発塵性が改善するとともに、コンベア装置100のメンテナンス性も向上する。
【0047】
駆動モータ3は収容箱50に収容されているため、コンベア装置100を水洗浄しても駆動モータ3が濡れることがない。したがって、駆動モータ3を設置した状態でコンベア装置100の水洗浄を実施でき、コンベア装置100の洗浄性をより改善することが可能となる。
【0048】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0049】
コンベア装置100は1つの搬送部10を1つの支持部20で支持するが、これに限定されるものではない。例えば、コンベア装置100は、図5に示すように、搬送方向に複数(図5において3つ)連設される搬送部10を1つの支持部20によって支持するように構成してもよい。
【0050】
コンベア装置100は、医薬品分野における薬剤を搬送する装置としたが、化学品や食料品等を搬送する装置としてもよい。
【0051】
また、コンベア装置100では、駆動スプロケット12及び従動スプロケット13に、チェーン14を巻き回しているが、チェーン14に変えてベルトを巻き回してもよい。
【0052】
さらに、コンベア装置100では、コントローラ60を外部に配置するようにしたが、端子ボックス70内に収容するようにしてもよい。
【産業上の利用可能性】
【0053】
本発明は、搬送物を搬送するチェーンコンベアやベルトコンベア等のコンベア装置に適用することが可能である。
【符号の説明】
【0054】
100 コンベア装置
1 受容器
3 駆動モータ
10 搬送部
11 コンベアフレーム
11C 開口部
11D 閉止板
12 駆動スプロケット
13 従動スプロケット
14 チェーン
20 支持部
30 コンベア架台
40 誘導部
50 収容箱
60 コントローラ
61 第1位置検出センサ
62 第2位置検出センサ
70 端子ボックス
71 電気配線
72 電気配線
73 電気配線
【特許請求の範囲】
【請求項1】
搬送物を搬送するコンベア装置において、
外側側面に形成された開口部と、外側側面に着脱可能に設けられて前記開口部を閉止する閉止板とを有するコンベアフレームと、
前記コンベアフレームに回転可能に設けられる駆動回転体及び従動回転体と、
前記駆動回転体と前記従動回転体とに巻き回されるとともに、前記搬送物を載置可能な載置部と、
前記駆動回転体を回転駆動して、前記載置部を移動させる駆動源と、
中空状の枠部材によって形成され、前記コンベアフレームを支持する支持部と、
前記駆動源の動作を制御する制御部と、
前記駆動源の動作制御に利用される電装品と、
前記支持部の内部に配設され、前記制御部と前記電装品とを接続する電気配線と、
を備えるコンベア装置。
【請求項2】
前記支持部は、
前記コンベアフレームを下側から支えるコンベア架台と、
前記コンベア架台に設けられ、搬送される前記搬送物を誘導する誘導部と、
を備えることを特徴とする請求項1に記載のコンベア装置。
【請求項3】
前記駆動源を収容する収容箱と、
前記コンベア架台と前記収容箱の内部を連通する連通部と、をさらに備え、
前記電装品は、前記駆動源であって、
前記制御部からの前記電気配線は、前記コンベア架台及び前記連通路の内部を通じて前記収容箱内に導かれ、前記駆動源と接続することを特徴する請求項2に記載のコンベア装置。
【請求項4】
前記電装品は、前記誘導部に設けられて前記搬送物の位置を検出する位置検出センサであって、
前記制御部からの前記電気配線は、前記コンベア架台及び前記誘導部の内部を通じて、前記位置検出センサと接続することを特徴する請求項2に記載のコンベア装置。
【請求項5】
前記支持部は、連設される複数の前記搬送部を支持することを特徴とする請求項1から請求項4のいずれか1つに記載のコンベア装置。
【請求項1】
搬送物を搬送するコンベア装置において、
外側側面に形成された開口部と、外側側面に着脱可能に設けられて前記開口部を閉止する閉止板とを有するコンベアフレームと、
前記コンベアフレームに回転可能に設けられる駆動回転体及び従動回転体と、
前記駆動回転体と前記従動回転体とに巻き回されるとともに、前記搬送物を載置可能な載置部と、
前記駆動回転体を回転駆動して、前記載置部を移動させる駆動源と、
中空状の枠部材によって形成され、前記コンベアフレームを支持する支持部と、
前記駆動源の動作を制御する制御部と、
前記駆動源の動作制御に利用される電装品と、
前記支持部の内部に配設され、前記制御部と前記電装品とを接続する電気配線と、
を備えるコンベア装置。
【請求項2】
前記支持部は、
前記コンベアフレームを下側から支えるコンベア架台と、
前記コンベア架台に設けられ、搬送される前記搬送物を誘導する誘導部と、
を備えることを特徴とする請求項1に記載のコンベア装置。
【請求項3】
前記駆動源を収容する収容箱と、
前記コンベア架台と前記収容箱の内部を連通する連通部と、をさらに備え、
前記電装品は、前記駆動源であって、
前記制御部からの前記電気配線は、前記コンベア架台及び前記連通路の内部を通じて前記収容箱内に導かれ、前記駆動源と接続することを特徴する請求項2に記載のコンベア装置。
【請求項4】
前記電装品は、前記誘導部に設けられて前記搬送物の位置を検出する位置検出センサであって、
前記制御部からの前記電気配線は、前記コンベア架台及び前記誘導部の内部を通じて、前記位置検出センサと接続することを特徴する請求項2に記載のコンベア装置。
【請求項5】
前記支持部は、連設される複数の前記搬送部を支持することを特徴とする請求項1から請求項4のいずれか1つに記載のコンベア装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−230884(P2011−230884A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−102073(P2010−102073)
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(510118031)株式会社ティエーエンジニアリング (1)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(510118031)株式会社ティエーエンジニアリング (1)
【Fターム(参考)】
[ Back to top ]