
コンベア装置
【課題】ベルトコンベアの搬送面に付着した搬入物の除去性能を向上する。
【解決手段】本発明のコンベア装置100は、本体フレーム21に搭載され、外周の搬送面20Eに搬入物を載せて循環する無端ベルト状のベルトコンベア20と、ベルトコンベア20の幅方向に沿って本体フレーム21に固定され、ベルトコンベア20における搬入物の搬出位置20Fよりも下流にて搬送面20Eに当接するブラシ42とを備える。
【解決手段】本発明のコンベア装置100は、本体フレーム21に搭載され、外周の搬送面20Eに搬入物を載せて循環する無端ベルト状のベルトコンベア20と、ベルトコンベア20の幅方向に沿って本体フレーム21に固定され、ベルトコンベア20における搬入物の搬出位置20Fよりも下流にて搬送面20Eに当接するブラシ42とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬入物を載せて循環するベルトコンベアを有するコンベア装置に関するものである。
【背景技術】
【0002】
従来から、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアを有するコンベア装置が知られている。コンベア装置では、ベルトコンベアにおける上側の上側通路に搬入物を載せ、下側の下側通路との間における搬出位置にて搬入物を搬出している。
【0003】
特許文献1には、搬送ベルトに対して接触するスクレーパと、搬送ベルトに対して空気を噴射するエアブロー装置とを備え、搬送ベルトの残留付着物を除去するベルトコンベア装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−171824号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のベルトコンベア装置では、スクレーパは、板状のゴムによって形成され、ベルトコンベアの搬送面に直線状に当接するものである。このベルトコンベア装置では、スクレーパの幅が大きいため、スクレーパの全幅にわたって搬送面との当接状態を維持することは困難であった。よって、このような板状のスクレーパでは、紙などの薄い搬入物を搬送した場合に、搬送面に貼りついた搬入物を除去できないことがあった。また、エアブロー装置によって空気を噴射しても、搬送面に貼りついた紙などの薄い搬入物を除去することは困難であった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、ベルトコンベアの搬送面に付着した搬入物の除去性能を向上することを目的とする。
【課題を解決するための手段】
【0007】
本発明のコンベア装置は、本体フレームに搭載され、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアと、前記ベルトコンベアの幅方向に沿って前記本体フレームに固定され、前記ベルトコンベアにおける搬入物の搬出位置よりも下流にて前記搬送面に当接するブラシと、を備えることを特徴とする。これにより、搬入物の搬出位置よりも下流にてベルトコンベアの搬送面に当接するブラシを備えるため、搬送面に紙などの薄い搬入物が付着していても、ブラシによって掻き取ることが可能となる。
【発明の効果】
【0008】
本発明によれば、ベルトコンベアの搬送面に付着した搬入物の除去性能を向上することができる。
【図面の簡単な説明】
【0009】
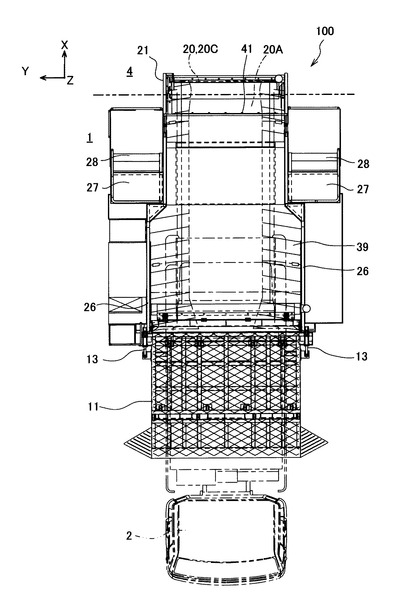
【図1】本発明の実施の形態によるコンベア装置の平面図である。
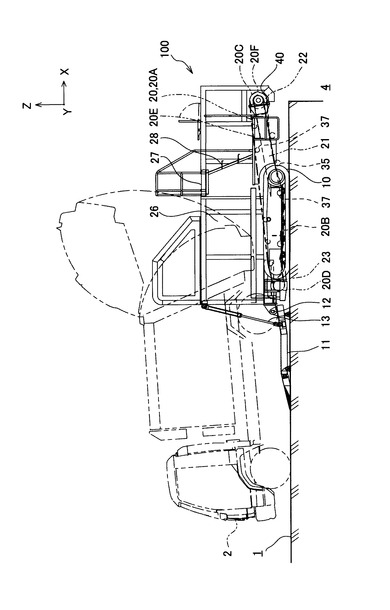
【図2】図1における側面図である。
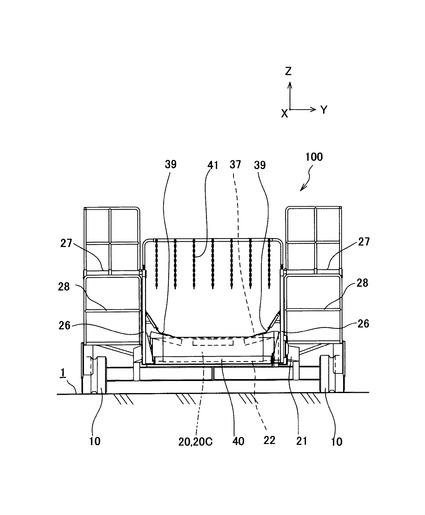
【図3】図1における正面図である。
【図4】図1おけるベルトコンベアの全端の折り返し部近傍の平面図である。
【図5】図4におけるA矢視図である。
【図6】図5におけるB矢視図である。
【図7】図5におけるC矢視図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施の形態に係るコンベア装置100について説明する。
【0011】
まず、図1から図3を参照して、コンベア装置100の全体構成について説明する。図1から図3では、互いに直交するX、Y、Zの三軸を設定し、X軸が略水平前後方向、Y軸が略水平左右方向、Z軸が略垂直方向に延びるものとする。
【0012】
コンベア装置100は、廃棄物等の搬入物を処理する処理工場において、プラットホーム1上に停車した搬入車両2から投下される搬入物を受け取り、処理ピット4へ投入する。コンベア装置100は、搬入車両2から投下された搬入物の検査作業を行うためのものである。この検査作業は、搬入物に含まれる例えば金属等の異物を検出するものである。
【0013】
コンベア装置100は、搬入物の検査時などに搬入車両2から投下された搬入物を受けて搬送するものである。
【0014】
コンベア装置100は、図2に示すように、本体フレーム21と、本体フレーム21に搭載される循環可能な無端ベルト状のベルトコンベア20と、ベルトコンベア20を循環させる前後のローラ22,23とを備える。また、コンベア装置100は、本体フレーム21を移動可能とする走行装置としてのクローラ10(図2参照)と、折り畳み式のスロープ11とを備える。
【0015】
ベルトコンベア20は、外周の搬送面20Eに搬入物を載せて搬送するものである。ベルトコンベア20は、搬送面20Eに載せられた搬入物を搬送する搬送部20Aと、搬送部20Aの下方を循環する循環部20Bと、搬送部20Aと循環部20Bとの両端を各々連結する一対の折り返し部20C,20Dとを有する。ベルトコンベア20は、搬送部20A上に搬入された搬入物を搬送し、後端の折り返し部20Dに位置する搬出位置20Fにて搬出する。
【0016】
搬出位置20Fは、折り返し部20Dにおける最も前方に突出した位置である。搬送面20Eに載せられた搬入物は、搬送部20Aから折り返し部20Dに搬送されて搬出位置20Fに差し掛かると、重力によって処理ピット4に落下する。
【0017】
ローラ22,23は、中心軸まわりに回転可能なように本体フレーム21に支持される。前端のローラ22は、前端の折り返し部20Cにてベルトコンベア20の裏面に転接する。前端のローラ22は、油圧モータ(図示省略)によって回転駆動される。これにより、ベルトコンベア20が循環する。ローラ22は、ローラ23と比較して高い位置に設けられる。
【0018】
一方、後端のローラ23は、後端の折り返し部20Dにてベルトコンベア20の裏面に転接する。ローラ23は、プラットホーム1等に干渉しない範囲で、できるだけ低い位置に設けられる。
【0019】
搬送部20Aは、前端のローラ22と後端のローラ23とに渡って本体フレーム21の上方を循環する。一方、循環部20Bは、本体フレーム21の下方を循環する。即ち、ベルトコンベア20は、本体フレーム21の上下を通って循環する。これにより、ベルトコンベア20の上方のスペースが開放されるとともに、ベルトコンベア20の搬送経路が低く抑えられる。
【0020】
コンベア装置100には、エンジン(図示省略)によって駆動される油圧ユニット(図示省略)が搭載される。前端のローラ22を駆動する油圧モータは、油圧ユニットから供給される作動油圧によって回転作動する。
【0021】
コンベア装置100は、ベルトコンベア20の裏面に転接する複数のキャリアローラ34と、ベルトコンベア20の表面に転接する複数のキャリアローラ35とを備える。また、コンベア装置100は、ベルトコンベア20の左右端部に沿って立設される左右の壁部26と、ベルトコンベア20の裏面に摺接するガイドレール(図示省略)と、ベルトコンベア20の裏面に転接する複数のキャリアローラ37と、ベルトコンベア20の表面両側部に摺接する左右のサイドプレート39(図2参照)とを備える。
【0022】
キャリアローラ34とキャリアローラ35とは、本体フレーム21の下部に設けられる。キャリアローラ34とキャリアローラ35とは、ベルトコンベア20が本体フレーム21の下部やプラットホーム1などに干渉しないように案内する。
【0023】
ガイドレールとキャリアローラ37とは、本体フレームの上部に設けられる。左右のサイドプレート39は、その基端部が左右の壁部26に回動可能に連結され、キャリアローラ37との間にベルトコンベア20を挟むようにしてベルトコンベア20の表面に摺接する。これにより、ベルトコンベア20によって搬送される搬入物が左右に拡がらないように案内される。
【0024】
クローラ10は、本体フレーム21に取り付けられる。クローラ10は、図3に示すように、本体フレーム21の左右に各々設けられる。クローラ10に代えて、車輪などの他の走行装置を設けてもよい。
【0025】
スロープ11は、その基端部が本体フレーム21の後部に支持ピン12を介して回動可能に連結される。スロープ11は、一対の油圧シリンダ13によって駆動される。図2に示すように、スロープ11が展開されてプラットホーム1に接地した状態では、搬入車両2がスロープ11上に乗り上げ、搬入物をベルトコンベア20上に投下することが可能である。
【0026】
一方、スロープ11が収納された状態では、クローラ10の駆動によってコンベア装置100が移動可能である。
【0027】
コンベア装置100は、図3に示すように、左右の壁部26の外側に設けられる検査台27と、作業者が検査台に上るための階段28と、左右の壁部26に渡ってベルトコンベア20上の前側を囲む安全柵41とを備える。
【0028】
階段28と検査台27とが設けられることによって、作業者が検査台27に上り、検査台27上からベルトコンベア20によって搬送される搬入物を目視などによって検査することが可能である。また、安全柵41が設けられることによって、作業者が誤って処理ピット4へ転落することが防止される。
【0029】
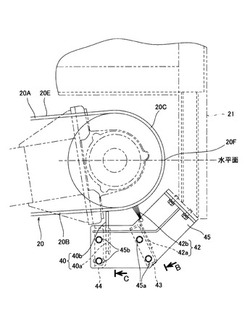
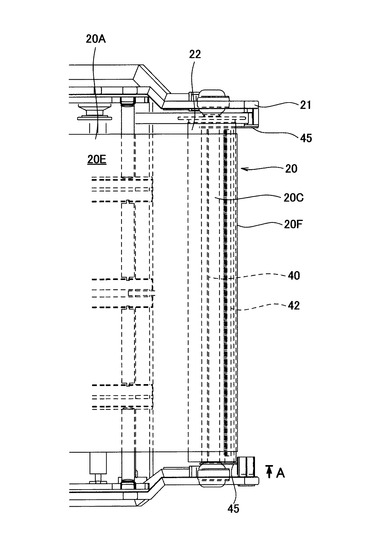
次に、図4から図7を参照して、コンベア装置100におけるベルトコンベア20の前端の折り返し部20C近傍について説明する。
【0030】
コンベア装置100は、ベルトコンベア20における搬入物の搬出位置20Fよりも下流にて搬送面20Eに当接するブラシ42と、ブラシ42よりも更に下流にてベルトコンベア20の幅方向に当接する板状のスクレーパ40とを備える。ブラシ42とスクレーパ40とは、一対の延長ブラケット45を介して本体フレーム21に取り付けられる。
【0031】
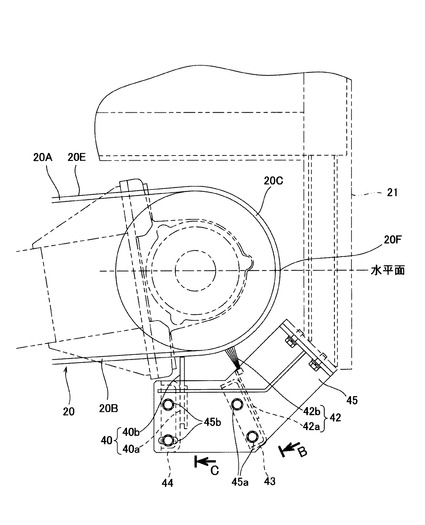
延長ブラケット45は、図5に示すように、その基端が本体フレーム21に固定される板材である。延長ブラケット45は、ベルトコンベア20における折り返し部20Cの形状に沿うようにL字状に形成される。
【0032】
延長ブラケット45は、ブラシ42を取り付けるための一対の孔45aと、スクレーパ40を取り付けるための一対の孔45bとを有する。一対の孔45bのうちの一方は、スクレーパ40の取り付け角度が変更可能なように、長穴状に形成される。
【0033】
ブラシ42は、搬送面20Eに貼り付いていて搬出位置20Fを越えても処理ピット4に落下しなかった搬送物を掻き取って除去するものである。ブラシ42は、図4に示すように、ベルトコンベア20の幅方向に沿って直線状に設けられる。ブラシ42は、図5に示すように、搬送面20Eに対して垂直に設けられる。
【0034】
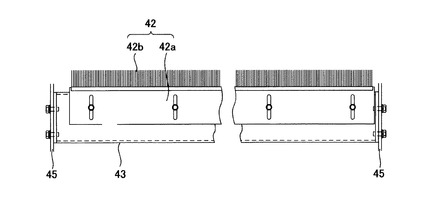
ブラシ42は、本実施の形態では、水平面に対して下方向に65度の角度で搬送面20Eに当接する。ブラシ42の取り付け角度は、65度に限らず、水平面に対して下方向に45度以上であればよい。ブラシ42は、本体部42aとブラシ部42bとを有する。
【0035】
本体部42aは、ブラシ部42bを支持して本体フレーム21に固定する矩形の板である。本体部42aは、ブラケット43及び延長ブラケット45を介して本体フレーム21に固定される。
【0036】
ブラシ部42bは、所定の大きさに束ねられた束が等ピッチ間隔で隙間なく並べられて直線状に形成される。ブラシ部42bの基端は、本体部42aに支持される。ブラシ部42bの先端は、搬出位置20Fが位置する折り返し部20Cにて搬送面20Eに当接する。
【0037】
ブラシ42は、搬送面20Eに対する突出量が調整可能に設けられる。これにより、ブラシ42は、ブラシ部42bの先端が搬送面20Eに押し付けられた状態に調整されて固定される。
【0038】
ブラケット43は、U字状の断面に形成されるアングル材である。ブラケット43は、ベルトコンベア20の幅方向に沿って長く形成される。ブラケット43の両端は、ボルトによって延長ブラケット45に締結される。
【0039】
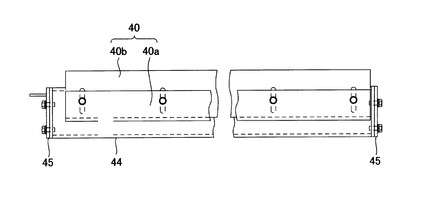
スクレーパ40は、ブラシ42によって除去しきれなかった搬入物や、ブラシ42との接触によって搬送面20Eから浮いた状態となった搬入物を掻き取るものである。スクレーパ40は、図4に示すように、ベルトコンベア20の幅方向に沿って直線状に設けられる。スクレーパ40は、本体部40aとスクレーパ部40bとを有する。
【0040】
本体部40aは、スクレーパ部40bを支持して本体フレーム21に固定する矩形の板である。本体部40aは、ブラケット44及び延長ブラケット45を介して本体フレーム21に固定される。
【0041】
スクレーパ部40bは、ゴムなどの樹脂によって形成される矩形の板である。スクレーパ部40bの基端は、本体部40aに支持される。スクレーパ部40bの先端は、折り返し部20Cと循環部20Bとの境界の近傍にて、搬送面20Eに当接する。スクレーパ部40bは、ベルトコンベア20の前端折り返し部20Cに摺接した状態で固定される。
【0042】
ブラケット44は、U字状断面に形成されるアングル材である。ブラケット44は、ベルトコンベア20の幅方向に長く形成される。ブラケット44の両端は、ボルトによって延長ブラケット45に締結される。
【0043】
ブラケット44は、延長ブラケット45に形成されるボルト締結用の一対の孔45bのうち一方が長穴であるため、ベルトコンベア20に対する取り付け角度が調整可能である。これにより、搬入物の種類によってスクレーパ40の取り付け角度を変更できるため、掻き取り性能を向上することが可能である。
【0044】
ブラシ42とスクレーパ40とは、図6及び図7に示すように、長手方向に直線状に形成されるが、これを長手方向に複数に分割してもよい。ブラシ42とスクレーパ40とを複数に分割することで、搬送面20Eへの押し付け力などの当接状態を調整しやすくできる。
【0045】
次に、コンベア装置100における搬入物の検査作業について説明する。
【0046】
まず、コンベア装置100をクローラ10の駆動によって処理ピット4の手前に移動し、ベルトコンベア20の折り返し部20Cを処理ピット4に臨ませる。そして、コンベア装置100の後部のスロープ11を展開して接地させ、搬入車両2を後向きでスロープ11に乗り上げた位置で停車させる。これにより、搬入車両2の排出部が、コンベア装置100のベルトコンベア20上に臨むこととなる。
【0047】
次に、搬入物を搬入車両2の排出部からベルトコンベア20の搬送部20Aに投下し、搬送面20E上にて搬入物の検査作業が行われる。検査作業を終えたら、ベルトコンベア20を循環させ、ベルトコンベア20上の搬入物を処理ピット4へと搬出する。このとき、ベルトコンベア20上の搬入物は、前端の折り返し部20Cの搬出位置20Fから処理ピット4へと搬出される。
【0048】
ここで、例えば紙などの薄い搬入物を搬送する場合には、搬入物が搬送面20Eに貼り付いて、搬出位置20Fを越えても処理ピット4に落下しないことがある。
【0049】
これに対して、搬入物の搬出位置20Fよりも下流にてベルトコンベア20の搬送面20Eに当接するブラシ42が設けられる。そのため、搬送面20Eに紙などの薄い搬入物が付着していても、ブラシ42によって掻き取ることが可能となる。したがって、ベルトコンベア20の搬送面20Eに付着した搬入物の除去性能を向上することができる。
【0050】
また、ブラシ42は、水平面に対して下方向に45度以上の角度で搬送面20Eに当接するように取り付けられる。そのため、搬入物は、重力によって搬送面20Eから剥がれ落ちようとする力が作用する位置にて、ブラシ部42bによって掻き取られる。ブラシ部42bによって掻き取られた搬送物は、重力によって処理ピット4に落下することとなる。
【0051】
更に、ブラシ42の下流にスクレーパ40が設けられるため、ブラシ42によって除去しきれなかった搬入物や、ブラシ42によって搬送面20Eから浮いた状態となった搬送物を掻き取ることができる。
【0052】
上記検査作業が終了したら、展開していたスロープ11を格納し、コンベア装置100をクローラ10の駆動によって自走させて撤去する。これにより、搬入車両2が処理ピット4の直前まで乗り入れて、搬入車両2の排出部から搬入物を処理ピット4に直接投下する通常の搬入作業が可能となる。この結果、廃棄物処理工場における処理ピット4の稼働率を高めることができる。
【0053】
以上の実施の形態によれば、以下に示す効果を奏する。
【0054】
搬入物の搬出位置20Fよりも下流にてベルトコンベア20の搬送面20Eに当接するブラシ42を備えるため、搬送面20Eに紙などの薄い搬入物が付着していても、ブラシ42によって掻き取ることが可能となる。したがって、ベルトコンベア20の搬送面20Eに付着した搬入物の除去性能を向上することができる。
【0055】
本発明は上記の実施の形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【符号の説明】
【0056】
100 コンベア装置
4 処理ピット
10 クローラ(走行装置)
11 スロープ
20 ベルトコンベア
20A 搬送部
20B 循環部
20C 折り返し部
20D 折り返し部
20E 搬送面
20F 搬出位置
21 本体フレーム
27 検査台
28 階段
40 スクレーパ
42 ブラシ
【技術分野】
【0001】
本発明は、搬入物を載せて循環するベルトコンベアを有するコンベア装置に関するものである。
【背景技術】
【0002】
従来から、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアを有するコンベア装置が知られている。コンベア装置では、ベルトコンベアにおける上側の上側通路に搬入物を載せ、下側の下側通路との間における搬出位置にて搬入物を搬出している。
【0003】
特許文献1には、搬送ベルトに対して接触するスクレーパと、搬送ベルトに対して空気を噴射するエアブロー装置とを備え、搬送ベルトの残留付着物を除去するベルトコンベア装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−171824号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のベルトコンベア装置では、スクレーパは、板状のゴムによって形成され、ベルトコンベアの搬送面に直線状に当接するものである。このベルトコンベア装置では、スクレーパの幅が大きいため、スクレーパの全幅にわたって搬送面との当接状態を維持することは困難であった。よって、このような板状のスクレーパでは、紙などの薄い搬入物を搬送した場合に、搬送面に貼りついた搬入物を除去できないことがあった。また、エアブロー装置によって空気を噴射しても、搬送面に貼りついた紙などの薄い搬入物を除去することは困難であった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、ベルトコンベアの搬送面に付着した搬入物の除去性能を向上することを目的とする。
【課題を解決するための手段】
【0007】
本発明のコンベア装置は、本体フレームに搭載され、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアと、前記ベルトコンベアの幅方向に沿って前記本体フレームに固定され、前記ベルトコンベアにおける搬入物の搬出位置よりも下流にて前記搬送面に当接するブラシと、を備えることを特徴とする。これにより、搬入物の搬出位置よりも下流にてベルトコンベアの搬送面に当接するブラシを備えるため、搬送面に紙などの薄い搬入物が付着していても、ブラシによって掻き取ることが可能となる。
【発明の効果】
【0008】
本発明によれば、ベルトコンベアの搬送面に付着した搬入物の除去性能を向上することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態によるコンベア装置の平面図である。
【図2】図1における側面図である。
【図3】図1における正面図である。
【図4】図1おけるベルトコンベアの全端の折り返し部近傍の平面図である。
【図5】図4におけるA矢視図である。
【図6】図5におけるB矢視図である。
【図7】図5におけるC矢視図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施の形態に係るコンベア装置100について説明する。
【0011】
まず、図1から図3を参照して、コンベア装置100の全体構成について説明する。図1から図3では、互いに直交するX、Y、Zの三軸を設定し、X軸が略水平前後方向、Y軸が略水平左右方向、Z軸が略垂直方向に延びるものとする。
【0012】
コンベア装置100は、廃棄物等の搬入物を処理する処理工場において、プラットホーム1上に停車した搬入車両2から投下される搬入物を受け取り、処理ピット4へ投入する。コンベア装置100は、搬入車両2から投下された搬入物の検査作業を行うためのものである。この検査作業は、搬入物に含まれる例えば金属等の異物を検出するものである。
【0013】
コンベア装置100は、搬入物の検査時などに搬入車両2から投下された搬入物を受けて搬送するものである。
【0014】
コンベア装置100は、図2に示すように、本体フレーム21と、本体フレーム21に搭載される循環可能な無端ベルト状のベルトコンベア20と、ベルトコンベア20を循環させる前後のローラ22,23とを備える。また、コンベア装置100は、本体フレーム21を移動可能とする走行装置としてのクローラ10(図2参照)と、折り畳み式のスロープ11とを備える。
【0015】
ベルトコンベア20は、外周の搬送面20Eに搬入物を載せて搬送するものである。ベルトコンベア20は、搬送面20Eに載せられた搬入物を搬送する搬送部20Aと、搬送部20Aの下方を循環する循環部20Bと、搬送部20Aと循環部20Bとの両端を各々連結する一対の折り返し部20C,20Dとを有する。ベルトコンベア20は、搬送部20A上に搬入された搬入物を搬送し、後端の折り返し部20Dに位置する搬出位置20Fにて搬出する。
【0016】
搬出位置20Fは、折り返し部20Dにおける最も前方に突出した位置である。搬送面20Eに載せられた搬入物は、搬送部20Aから折り返し部20Dに搬送されて搬出位置20Fに差し掛かると、重力によって処理ピット4に落下する。
【0017】
ローラ22,23は、中心軸まわりに回転可能なように本体フレーム21に支持される。前端のローラ22は、前端の折り返し部20Cにてベルトコンベア20の裏面に転接する。前端のローラ22は、油圧モータ(図示省略)によって回転駆動される。これにより、ベルトコンベア20が循環する。ローラ22は、ローラ23と比較して高い位置に設けられる。
【0018】
一方、後端のローラ23は、後端の折り返し部20Dにてベルトコンベア20の裏面に転接する。ローラ23は、プラットホーム1等に干渉しない範囲で、できるだけ低い位置に設けられる。
【0019】
搬送部20Aは、前端のローラ22と後端のローラ23とに渡って本体フレーム21の上方を循環する。一方、循環部20Bは、本体フレーム21の下方を循環する。即ち、ベルトコンベア20は、本体フレーム21の上下を通って循環する。これにより、ベルトコンベア20の上方のスペースが開放されるとともに、ベルトコンベア20の搬送経路が低く抑えられる。
【0020】
コンベア装置100には、エンジン(図示省略)によって駆動される油圧ユニット(図示省略)が搭載される。前端のローラ22を駆動する油圧モータは、油圧ユニットから供給される作動油圧によって回転作動する。
【0021】
コンベア装置100は、ベルトコンベア20の裏面に転接する複数のキャリアローラ34と、ベルトコンベア20の表面に転接する複数のキャリアローラ35とを備える。また、コンベア装置100は、ベルトコンベア20の左右端部に沿って立設される左右の壁部26と、ベルトコンベア20の裏面に摺接するガイドレール(図示省略)と、ベルトコンベア20の裏面に転接する複数のキャリアローラ37と、ベルトコンベア20の表面両側部に摺接する左右のサイドプレート39(図2参照)とを備える。
【0022】
キャリアローラ34とキャリアローラ35とは、本体フレーム21の下部に設けられる。キャリアローラ34とキャリアローラ35とは、ベルトコンベア20が本体フレーム21の下部やプラットホーム1などに干渉しないように案内する。
【0023】
ガイドレールとキャリアローラ37とは、本体フレームの上部に設けられる。左右のサイドプレート39は、その基端部が左右の壁部26に回動可能に連結され、キャリアローラ37との間にベルトコンベア20を挟むようにしてベルトコンベア20の表面に摺接する。これにより、ベルトコンベア20によって搬送される搬入物が左右に拡がらないように案内される。
【0024】
クローラ10は、本体フレーム21に取り付けられる。クローラ10は、図3に示すように、本体フレーム21の左右に各々設けられる。クローラ10に代えて、車輪などの他の走行装置を設けてもよい。
【0025】
スロープ11は、その基端部が本体フレーム21の後部に支持ピン12を介して回動可能に連結される。スロープ11は、一対の油圧シリンダ13によって駆動される。図2に示すように、スロープ11が展開されてプラットホーム1に接地した状態では、搬入車両2がスロープ11上に乗り上げ、搬入物をベルトコンベア20上に投下することが可能である。
【0026】
一方、スロープ11が収納された状態では、クローラ10の駆動によってコンベア装置100が移動可能である。
【0027】
コンベア装置100は、図3に示すように、左右の壁部26の外側に設けられる検査台27と、作業者が検査台に上るための階段28と、左右の壁部26に渡ってベルトコンベア20上の前側を囲む安全柵41とを備える。
【0028】
階段28と検査台27とが設けられることによって、作業者が検査台27に上り、検査台27上からベルトコンベア20によって搬送される搬入物を目視などによって検査することが可能である。また、安全柵41が設けられることによって、作業者が誤って処理ピット4へ転落することが防止される。
【0029】
次に、図4から図7を参照して、コンベア装置100におけるベルトコンベア20の前端の折り返し部20C近傍について説明する。
【0030】
コンベア装置100は、ベルトコンベア20における搬入物の搬出位置20Fよりも下流にて搬送面20Eに当接するブラシ42と、ブラシ42よりも更に下流にてベルトコンベア20の幅方向に当接する板状のスクレーパ40とを備える。ブラシ42とスクレーパ40とは、一対の延長ブラケット45を介して本体フレーム21に取り付けられる。
【0031】
延長ブラケット45は、図5に示すように、その基端が本体フレーム21に固定される板材である。延長ブラケット45は、ベルトコンベア20における折り返し部20Cの形状に沿うようにL字状に形成される。
【0032】
延長ブラケット45は、ブラシ42を取り付けるための一対の孔45aと、スクレーパ40を取り付けるための一対の孔45bとを有する。一対の孔45bのうちの一方は、スクレーパ40の取り付け角度が変更可能なように、長穴状に形成される。
【0033】
ブラシ42は、搬送面20Eに貼り付いていて搬出位置20Fを越えても処理ピット4に落下しなかった搬送物を掻き取って除去するものである。ブラシ42は、図4に示すように、ベルトコンベア20の幅方向に沿って直線状に設けられる。ブラシ42は、図5に示すように、搬送面20Eに対して垂直に設けられる。
【0034】
ブラシ42は、本実施の形態では、水平面に対して下方向に65度の角度で搬送面20Eに当接する。ブラシ42の取り付け角度は、65度に限らず、水平面に対して下方向に45度以上であればよい。ブラシ42は、本体部42aとブラシ部42bとを有する。
【0035】
本体部42aは、ブラシ部42bを支持して本体フレーム21に固定する矩形の板である。本体部42aは、ブラケット43及び延長ブラケット45を介して本体フレーム21に固定される。
【0036】
ブラシ部42bは、所定の大きさに束ねられた束が等ピッチ間隔で隙間なく並べられて直線状に形成される。ブラシ部42bの基端は、本体部42aに支持される。ブラシ部42bの先端は、搬出位置20Fが位置する折り返し部20Cにて搬送面20Eに当接する。
【0037】
ブラシ42は、搬送面20Eに対する突出量が調整可能に設けられる。これにより、ブラシ42は、ブラシ部42bの先端が搬送面20Eに押し付けられた状態に調整されて固定される。
【0038】
ブラケット43は、U字状の断面に形成されるアングル材である。ブラケット43は、ベルトコンベア20の幅方向に沿って長く形成される。ブラケット43の両端は、ボルトによって延長ブラケット45に締結される。
【0039】
スクレーパ40は、ブラシ42によって除去しきれなかった搬入物や、ブラシ42との接触によって搬送面20Eから浮いた状態となった搬入物を掻き取るものである。スクレーパ40は、図4に示すように、ベルトコンベア20の幅方向に沿って直線状に設けられる。スクレーパ40は、本体部40aとスクレーパ部40bとを有する。
【0040】
本体部40aは、スクレーパ部40bを支持して本体フレーム21に固定する矩形の板である。本体部40aは、ブラケット44及び延長ブラケット45を介して本体フレーム21に固定される。
【0041】
スクレーパ部40bは、ゴムなどの樹脂によって形成される矩形の板である。スクレーパ部40bの基端は、本体部40aに支持される。スクレーパ部40bの先端は、折り返し部20Cと循環部20Bとの境界の近傍にて、搬送面20Eに当接する。スクレーパ部40bは、ベルトコンベア20の前端折り返し部20Cに摺接した状態で固定される。
【0042】
ブラケット44は、U字状断面に形成されるアングル材である。ブラケット44は、ベルトコンベア20の幅方向に長く形成される。ブラケット44の両端は、ボルトによって延長ブラケット45に締結される。
【0043】
ブラケット44は、延長ブラケット45に形成されるボルト締結用の一対の孔45bのうち一方が長穴であるため、ベルトコンベア20に対する取り付け角度が調整可能である。これにより、搬入物の種類によってスクレーパ40の取り付け角度を変更できるため、掻き取り性能を向上することが可能である。
【0044】
ブラシ42とスクレーパ40とは、図6及び図7に示すように、長手方向に直線状に形成されるが、これを長手方向に複数に分割してもよい。ブラシ42とスクレーパ40とを複数に分割することで、搬送面20Eへの押し付け力などの当接状態を調整しやすくできる。
【0045】
次に、コンベア装置100における搬入物の検査作業について説明する。
【0046】
まず、コンベア装置100をクローラ10の駆動によって処理ピット4の手前に移動し、ベルトコンベア20の折り返し部20Cを処理ピット4に臨ませる。そして、コンベア装置100の後部のスロープ11を展開して接地させ、搬入車両2を後向きでスロープ11に乗り上げた位置で停車させる。これにより、搬入車両2の排出部が、コンベア装置100のベルトコンベア20上に臨むこととなる。
【0047】
次に、搬入物を搬入車両2の排出部からベルトコンベア20の搬送部20Aに投下し、搬送面20E上にて搬入物の検査作業が行われる。検査作業を終えたら、ベルトコンベア20を循環させ、ベルトコンベア20上の搬入物を処理ピット4へと搬出する。このとき、ベルトコンベア20上の搬入物は、前端の折り返し部20Cの搬出位置20Fから処理ピット4へと搬出される。
【0048】
ここで、例えば紙などの薄い搬入物を搬送する場合には、搬入物が搬送面20Eに貼り付いて、搬出位置20Fを越えても処理ピット4に落下しないことがある。
【0049】
これに対して、搬入物の搬出位置20Fよりも下流にてベルトコンベア20の搬送面20Eに当接するブラシ42が設けられる。そのため、搬送面20Eに紙などの薄い搬入物が付着していても、ブラシ42によって掻き取ることが可能となる。したがって、ベルトコンベア20の搬送面20Eに付着した搬入物の除去性能を向上することができる。
【0050】
また、ブラシ42は、水平面に対して下方向に45度以上の角度で搬送面20Eに当接するように取り付けられる。そのため、搬入物は、重力によって搬送面20Eから剥がれ落ちようとする力が作用する位置にて、ブラシ部42bによって掻き取られる。ブラシ部42bによって掻き取られた搬送物は、重力によって処理ピット4に落下することとなる。
【0051】
更に、ブラシ42の下流にスクレーパ40が設けられるため、ブラシ42によって除去しきれなかった搬入物や、ブラシ42によって搬送面20Eから浮いた状態となった搬送物を掻き取ることができる。
【0052】
上記検査作業が終了したら、展開していたスロープ11を格納し、コンベア装置100をクローラ10の駆動によって自走させて撤去する。これにより、搬入車両2が処理ピット4の直前まで乗り入れて、搬入車両2の排出部から搬入物を処理ピット4に直接投下する通常の搬入作業が可能となる。この結果、廃棄物処理工場における処理ピット4の稼働率を高めることができる。
【0053】
以上の実施の形態によれば、以下に示す効果を奏する。
【0054】
搬入物の搬出位置20Fよりも下流にてベルトコンベア20の搬送面20Eに当接するブラシ42を備えるため、搬送面20Eに紙などの薄い搬入物が付着していても、ブラシ42によって掻き取ることが可能となる。したがって、ベルトコンベア20の搬送面20Eに付着した搬入物の除去性能を向上することができる。
【0055】
本発明は上記の実施の形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【符号の説明】
【0056】
100 コンベア装置
4 処理ピット
10 クローラ(走行装置)
11 スロープ
20 ベルトコンベア
20A 搬送部
20B 循環部
20C 折り返し部
20D 折り返し部
20E 搬送面
20F 搬出位置
21 本体フレーム
27 検査台
28 階段
40 スクレーパ
42 ブラシ
【特許請求の範囲】
【請求項1】
本体フレームに搭載され、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアと、
前記ベルトコンベアの幅方向に沿って前記本体フレームに固定され、前記ベルトコンベアにおける搬入物の搬出位置よりも下流にて前記搬送面に当接するブラシと、を備えることを特徴とするコンベア装置。
【請求項2】
前記ベルトコンベアは、前記搬送面に載せられた搬入物を搬送する搬送部と、前記搬送部の下方を循環する循環部と、前記搬送部と前記循環部との両端を各々連結する一対の折り返し部と、を有し、
前記ブラシは、前記搬出位置が位置する前記折り返し部にて前記搬送面に当接することを特徴とする請求項1に記載のコンベア装置。
【請求項3】
前記ブラシは、前記搬送面に対して垂直に設けられ、水平面に対して下方向の前記搬送面に当接することを特徴とする請求項2に記載のコンベア装置。
【請求項4】
前記ブラシは、前記搬送面に対する突出量が調整可能に設けられることを特徴とする請求項1から3のいずれか一つに記載のコンベア装置。
【請求項5】
前記本体フレームに固定され、前記ブラシよりも下流にて前記ベルトコンベアの幅方向に当接する板状のスクレーパを更に備えることを特徴とする請求項1から4のいずれか一つに記載のコンベア装置。
【請求項6】
前記スクレーパは、前記ベルトコンベアに対する取り付け角度が調整可能であることを特徴とする請求項5に記載のコンベア装置。
【請求項7】
前記本体フレームに取り付けられ、当該本体フレームを移動可能とする走行装置を更に備えることを特徴とする請求項1から6のいずれか一つに記載のコンベア装置。
【請求項1】
本体フレームに搭載され、外周の搬送面に搬入物を載せて循環する無端ベルト状のベルトコンベアと、
前記ベルトコンベアの幅方向に沿って前記本体フレームに固定され、前記ベルトコンベアにおける搬入物の搬出位置よりも下流にて前記搬送面に当接するブラシと、を備えることを特徴とするコンベア装置。
【請求項2】
前記ベルトコンベアは、前記搬送面に載せられた搬入物を搬送する搬送部と、前記搬送部の下方を循環する循環部と、前記搬送部と前記循環部との両端を各々連結する一対の折り返し部と、を有し、
前記ブラシは、前記搬出位置が位置する前記折り返し部にて前記搬送面に当接することを特徴とする請求項1に記載のコンベア装置。
【請求項3】
前記ブラシは、前記搬送面に対して垂直に設けられ、水平面に対して下方向の前記搬送面に当接することを特徴とする請求項2に記載のコンベア装置。
【請求項4】
前記ブラシは、前記搬送面に対する突出量が調整可能に設けられることを特徴とする請求項1から3のいずれか一つに記載のコンベア装置。
【請求項5】
前記本体フレームに固定され、前記ブラシよりも下流にて前記ベルトコンベアの幅方向に当接する板状のスクレーパを更に備えることを特徴とする請求項1から4のいずれか一つに記載のコンベア装置。
【請求項6】
前記スクレーパは、前記ベルトコンベアに対する取り付け角度が調整可能であることを特徴とする請求項5に記載のコンベア装置。
【請求項7】
前記本体フレームに取り付けられ、当該本体フレームを移動可能とする走行装置を更に備えることを特徴とする請求項1から6のいずれか一つに記載のコンベア装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−86960(P2013−86960A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231856(P2011−231856)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(304039065)カヤバ システム マシナリー株式会社 (185)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(304039065)カヤバ システム マシナリー株式会社 (185)
[ Back to top ]