
コンベヤと半導体処理ツール搭載ポートとの間のインタフェース装置
本発明は、容器輸送システム(160)と処理ツール(10)の間で容器を移送するためのツール搭載装置に関する。ツール搭載装置は、単一又は複数の搭載ポート(12)を使用する。ツール搭載装置は、処理ツール(10)の搭載ポート(12)と処理ツールを通る容器輸送システム(160)の部分との間に配置される。ツール搭載装置は、従来の搭載ポート(12)と、例えばコンベヤ(160)との間で容器を移動させる改良方法を提供する。別の実施形態では、ツール搭載装置は、搭載ポート(12)の前を通る容器輸送システム(160)に実質的に平行である経路に沿ってツール搭載装置を移動させるx方向駆動アセンブリに連結され、ツール搭載装置が複数の搭載ポート(12)を使用することを可能にする。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2005年5月16日に米国特許商標局に出願の「コンベヤと半導体処理ツール搭載ポートの間のインタフェース」という名称の米国特許仮出願出願番号第60/681、354号に対して35U.S.C.§119(e)に従って優先権を請求するものである。
【0002】
本発明は、一般的に、材料取扱システムと処理ツールとの間で容器を移送するための移送機構を含む。
【背景技術】
【0003】
「前開き統合ポッド(FOUP)」及び「標準機械的インタフェース(SMIF)」ポッドのような容器を半導体製造設備内の処理ツール及び搭載ポートまで配送することは高価である。処理ツール間でFOUP又は底開き容器を配送する1つの方法は、オーバーヘッド輸送(OHT)システムである。OHTシステムは、FOUPを製造設備の床から約900mmの高さレベルで搭載ポートの移動プレートの上に下降させる。OHTシステムは、FOUPを例えば処理ツールの搭載ポートまで配送する高性能の天井据え付けトラック及びケーブル巻き上げ車両を用いる。水平移動、ケーブル巻き上げ延長、及び一方向作動の組合せは、処理ツール間でFOUPを迅速に輸送するために調整する必要がある。輸送車両は、最良の効率を得るには、処理ツールを搭載するか又は取出す必要がある瞬間に利用可能であるべきである。
【0004】
OHTシステムは、多くの場合、設備天井の一部分上に装着され、従って、処理ツール及び搭載ポートの上方に配置される。処理ツールが典型的に床据え付け機器であるので、OHTシステムは、製造設備内の自由空間を利用する。天井据え付けOHTシステムは、OHTトラックと、単に一例として、搭載ポートとの間のかなりの距離で容器を上げたり又は下げたりする必要がある。OHTシステムは、トラックに沿ったFOUPの移動から生じるいかなる粒子も下に配置されるツールセクション上に落ちて潜在的にウェーハに損傷を与える場合があるので、好ましくは、非常に高い清浄度性能を有する。
【0005】
軌道搬送車(RGV)及び自動搬送車(AGV)は、多くの場合、容器を処理ツール間で設備の床に沿って移動させるために半導体製造設備で使用される。RGV及びAGVは、OHTシステムよりも保守目的でアクセスするのが容易であり、一般的に天井据え付けOHTシステムよりも費用がかからない。RGV又はAGVによって発生する粒子が搭載ポートの基準面の下に留まるので、粒子制御も簡素化される。しかし、RGV及びAGVは、半導体製造設備で非常に高価な価値のある床空間を占め、安全面の問題を呈する(例えば、ツールオペレータ及びRGVが、同じ空間で作業する)。
【0006】
半導体製造設備内の「自動材料取扱システム(AMHS)」コンベヤと処理ツールの間のインタフェースの例は、「Asyst Technologies、Inc.」に譲渡され「直接ツール搭載法」という名称の米国特許出願出願番号第11/064、880号に説明され、この米国特許出願を本明細書に援用する。例えば、「直接ツール搭載法」の発明の1つの実施形態は、半導体材料容器を処理ツールまで配送するコンベヤを含む。コンベヤは、好ましくは、搭載ポートの移動プレートの下に配置される。好ましい実施形態では、移動プレートは、実質的に垂直方向に移動して、容器をコンベヤと、処理ツールが容器に配置される材料にアクセスすることができる位置との間で移動する。
【発明の開示】
【発明が解決しようとする課題】
【0007】
全ての処理ツールが「直接搭載」ポートを用いることができるか、又はその使用を必要とすることになるとは限らない。実際に、単に一例として、「Asyst Technologies、Inc」に譲渡された「整列ピンなしFIMSインタフェース装置」という名称の米国特許第6、419、438号に開示された搭載ポートのような従来の搭載ポートに対して、床据え付けコンベヤをインタフェース装置で接続する必要性があることになる可能性が高く、この米国特許出願を本明細書に援用する。標準的な搭載ポートは、「SEMI BOLTS」インタフェース規格に適合することができるが、単体の前面据え付けプレートのような全てのBOLTS要件によっては制限されない。この説明で参照した標準的搭載ポートは、ポートドア、ドアリフト、又は移動プレートアセンブリに対して別々のモジュールを有することができると考えられる。重要な要件は、搭載ポートの移動プレートがSEMI規格によって説明した方法で容器を受け取ることができるということである。
【0008】
本明細書は、上述のコンベヤから処理ツール上の標準搭載ポートへの容器の搭載を容易にする本発明の説明である。コンベヤはまた、本発明では床の少し上方又は床の少し下方に据え付けることができると考えられる。
【課題を解決するための手段】
【0009】
本発明の1つの側面は、材料輸送システムと従来の搭載ポートの間に置くことができるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、床据え付けコンベヤと処理ツールの搭載ポートとの間に配置される。別の実施形態では、ツール搭載装置は、AGVの経路と処理ツールの搭載ポートとの間に配置される。別の実施形態では、ツール搭載装置は、RGVのレールと処理ツールの搭載ポートとの間に配置される。
【0010】
本発明の別の側面は、単一搭載ポート又は複数の搭載ポートを使用することができるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置の本体は、静止しており、単一の搭載ポートだけを使用できる。別の実施形態では、ツール搭載装置が複数の搭載ポート間を横方向に移動することができるように、ツール搭載装置の本体がx方向駆動アセンブリと連結される。
【0011】
本発明の更に別の側面は、容器を搭載ポートと材料輸送システムの間で効率的に移動させるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、実質的にz軸及びθ軸に沿った移動だけによって容器を搭載ポートとコンベヤの間で移送する単一剛性構造体を含む。別の実施形態では、ツール搭載装置は、垂直に調節可能なショルダ部に対して回転することによって、容器を搭載ポートと材料輸送システムとの間で移動させるアームを含む。
【0012】
本発明の更に別の側面は、既存の材料輸送システムと容易に統合するツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、材料輸送システムの部分を支持するx方向駆動アセンブリに連結され、ツール搭載装置の容易な設置を提供する。例えば、x方向駆動アセンブリは、x方向駆動アセンブリの上を移動する材料輸送システムを支持するハウジング内に包囲される。
【0013】
本発明の別の側面は、OHTシステム又は他の材料輸送システムが容器をツール搭載装置に配置/除去することを可能にするツール搭載装置を提供することである。例えば、ツール搭載装置は、容器の底面によって容器を支持することができ、それによってOHTシステムは、容器をツール搭載装置上の待機位置に置くことができる。
【発明を実施するための最良の形態】
【0014】
「半導体製造装置材料協会(SEMI)」は、半導体ウェーハ製造装置に対する規格を作成した(http://www.semi.org参照)。「SEMI規格」は、半導体製造装置に対する許容できる公差及びインタフェースを規定するものである。本明細書に説明する本発明は、FOUPを取り扱うための半導体製造装置に限定されない。
【0015】
単なる一例として、本発明の様々な実施形態はまた、SMIFポッド、レチクル容器、フラットパネルディスプレイ輸送装置、又は任意の他の前開き又は底開き容器又は処理ツールを処理するためのシステムに用いることができ、及び/又はそれに適応させすることができる。容器は、以下に制限されるものではないが、半導体基板を含む物品を支持するための任意の種類の構造体として定義される。単に一例として、容器は、物品にアクセス可能な開放容積を含む構造体(例えば、FPD輸送)、又は機械的に開放可能なドアを有する容器(例えば、底開きSMIFポッド及びFOUP)を含む。搭載ポートは、容器を取り扱うインタフェース機器として定義される。しかし、本発明を説明する目的のために、FOUP及び底開き容器を取り扱うための搭載ポートだけを本明細書で以下に参照する。
【0016】
図1〜図3は、容器を床据え付けコンベヤと処理ツールの搭載ポートとの間で移動させるための様々なシステムを概略的に示している。図1〜図3の各システムは、容器を4つの主な箇所、即ち、位置A、B、C、Dの間で移動させることを例示している。これらの箇所は、本発明の様々な実施形態を説明するために本出願を通じて用いられる。
【0017】
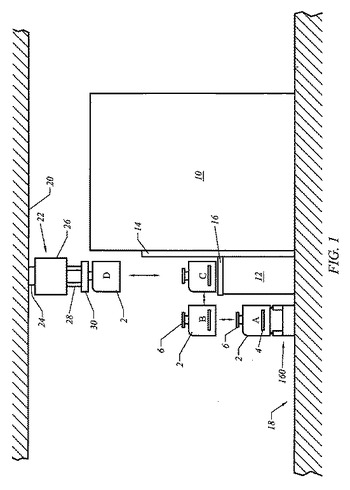
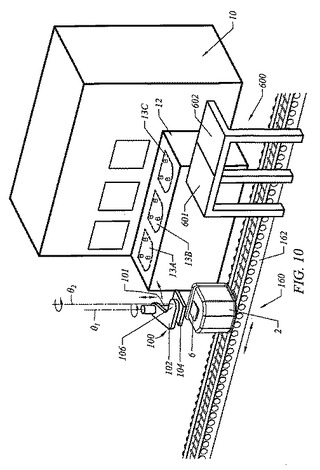
図1は、FOUP2を示し、FOUP2は、コンベヤ160の上に着座し(位置A)、搭載ポート12の移動プレート16の上に着座し(位置C)、オーバーヘッド輸送(OHT)車両22によって把持される(位置D)。位置Bは、コンベヤ160と搭載ポート12との間の中間移送段階、又は、FOUP格納箇所のいずれかを表す(図10参照)。後に説明する単一の容器移送装置、例えばロボットは、好ましくは、FOUP2を位置A、B及びCの間で移動させる(図4〜図7参照)。
【0018】
この実施形態では、処理ツール10及びコンベヤ160は各々、床ベース要素である。図1に示すコンベヤ160は、代表例に過ぎない。床ベースコンベヤは、一般的に、処理ツール10のための搭載高さレベルよりも低い高さレベルで容器を輸送する任意の容器輸送システム(例えば、コンベヤ、AGV、RGV)を表している。従来の搭載ポート12は、処理ツール10に取付けられている。また、これらの要素の各々は、設備内の他の位置に配置されてもよく、例えば、コンベヤ160は、設備の床18の下に配置されていてもよいし、床よりも上に上昇させられていてもよい。OHT車両22は、好ましくは、設備の天井20に固定された駆動レール24に沿って移動する。図1は、この実施形態のOHT駆動レール24がx方向、例えば、コンベヤ160と平行な方向に沿う向きに配置されていることを示す。OHT車両22は、FOUP2をその上部ハンドル6のところで保持するための把持機構30を有している。例えば、FOUPを、その側面ハンドル4又は下部フランジによって保持することも本発明の範囲内である。OHT車両22は、把持機構30を格納式懸架ケーブル18によって垂直方向に移動させる。本発明を説明する目的だけのために、格納式ケーブルは、ケーブル、ベルト、バンド、又はこれらの品目の任意の組合せを含むが、それに限定されるわけではない。
【0019】
従来の搭載ポート12は、しばしば、移動プレート16を含み、移動プレート16は、その上にFOUPを整列させる移動ピンを有している。これらの移動ピンは、移動プレート16から上方に延びている。FOUPの底面は、FOUP2が移動プレート16上に位置決めされた時に移動ピンを受入れる3つの整列用受け部を有している。従って、FOUP2が移動プレート16上に位置決めされる前に、FOUP2を移動ピンとほぼ整列させる必要がある。FOUP2を移動ピンのところに配置したり、FOUP2を移動ピンから取外したりするために、FOUP移送装置は、位置Cに配置されたFOUP2を垂直方向に移動させるように構成されている。
【0020】
各FOUP移送装置はまた、FOUP2を任意の数の移動経路に沿って位置Bと位置Cの間を移動させる。例えば、移動経路は、非直線弧(図5参照)であってもよいし、実質的に直線の経路(図6参照)に沿っていてもよい。いずれにせよ、FOUP移送装置は、FOUP2を、単なる例示としては、FOUPの上部ハンドル6、側面ブラケット22、FOUPの下部プレートの側縁、又はFOUPの下部を、例えば移動ピン支持体の領域の外側の側縁に隣接して保持するのがよい。FOUP2を保持する各方法は、好ましくは、FOUPをコンベヤ160から搭載ポート12の移動プレート16まで直接移送することができるように、FOUPの底面の整列形態を妨げず、FOUPは、その底面で支持された状態で静止している。
【0021】
容器移送装置はまた、待機位置、例えば位置Bを有し、待機位置において、容器移送装置はFOUPなしに待機し、例えば、容器移送装置は、容器を位置A、B、Cの間で移動させない。この待機位置は、オペレータ又は配送車両が、FOUPをコンベヤの上方の便利な箇所にある移送装置の上に配送することを可能にする。例えば、FOUPを搭載ポート12上に配置するために、オペレータは、コンベヤ10上に手を伸ばす必要はない。その代わりに、オペレータは、FOUPを、コンベヤ160の真上に配置された格納棚又は容器搭載装置の上に配置する。
【0022】
OHTシステム22は、FOUPを処理ツール10の搭載ポート12に配送する追加の方法を提供し、この方法は、設備の処理量を増大させる。図1は、処理ツールの搭載ポート12と実質的に垂直方向に整列したOHT車両26を示している。OHTシステム22は、設備天井20に固定されたレール24と、レール24に沿って移動するOHT車両26と、ケーブル28によって上げ下げされる把持器30とを有している。OHTシステム22を搭載ポート12と整列させることにより、OHTシステム22が、FOUP2を移動プレート16上に直接下降させ且つ/又はFOUP2を移動プレート16から取出すことを可能にする。
【0023】
処理ツールが、「Asyst Technologies、Inc.」に譲渡された「直接搭載ツール」という名称の米国特許出願出願番号第11/064、880号に開示された搭載ポートと類似の搭載ポートを含むことも本発明の範囲内であり、かかる米国特許を本明細書に援用する。「直接搭載ツール」が用いられる場合、OHTシステム22が、「直接搭載ツール」のFOUP前進プレートを使用してもよい。
【0024】
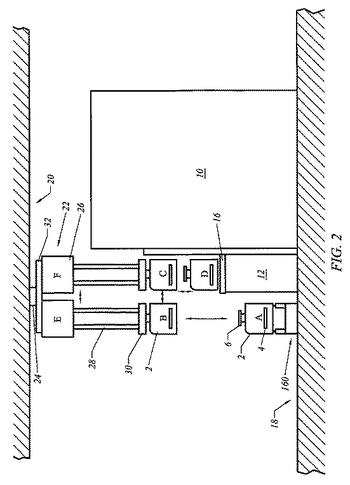
図2は、本発明で作動させることができるOHTシステム22の別の実施形態を示している。この実施形態では、OHTシステム22は、OHT車両26を位置Eと位置Fの間で移動させるY軸方向駆動装置32を有している。OHTシステム22は、OHT車両26が位置Eに配置されている間、コンベヤ160上のFOUP2を取出したりFOUP2をコンベヤ160の上に配置したりするように位置決めされる。OHTシステム22は、OHT車両26が位置Fに配置されている間、搭載ポート12上のFOUP2を取出したりFOUP2を搭載ポート12の上に配置したりするように位置決めされる。
【0025】
作動時、OHTシステム22は、位置AのFOUP2を持上げ、それを位置Bまで更に持上げ、次いでFOUP2を位置Cまで水平方向に移動させ、最後にFOUP2を搭載ポート12(位置D)の上に下降させることによって、FOUP2をコンベヤ160と処理ツール10との間で移動させる。これらの位置A〜Dは、代表的なものに過ぎない。実際の位置A〜Dは、変更されてもよく、例えば、最初に容器をコンベヤから図2に示す高さレベルよりも高い高さレベルの位置Bまで上昇させてもよい。逆の移動シーケンス(例えば、位置Dから位置C及び位置Bを通って位置Aまで)により、FOUP2を搭載ポート12からコンベヤ160まで移送して戻す。これらの位置の間の経路は、当業技術で知られている任意の方法で達成される。例えば、移動経路のいくつか又は全てが重なってもよいし、位置Aから位置Dまでの湾曲した移動経路を構成してもよい。各移動経路は、異なる別々の経路である必要はない。実際、上記位置の間の移動経路を重ねることにより、搭載ポート12とコンベヤ160との間の全体の移送時間を短縮させる。
【0026】
図2は、好ましい実施形態において、位置B又は位置Cのいずれかに配置されるFOUP2の底面が、位置Dに配置されるFOUP2の上部ハンドル6よりも高い高さレベルに配置されることを示している。しかしながら、この特徴は、FOUP2を搭載ポート12とコンベヤ160との間で移送させるのに必要ない。実際、FOUP2を位置Cから位置Dまで移動させる間、FOUPの底面の高さレベルは、移動プレート上の任意の障害物、例えば移動ピン(図示せず)又はその他の整列要素の上を通過するのに十分な高さレベルが必要であるに過ぎない。
【0027】
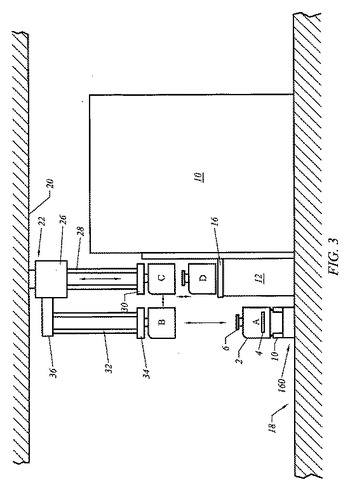
図3は、OHT車両26が、格納式ケーブル32を支持するための片持ち機構36を有していることを示す。片持ち機構36は、OHT車両26に取付けられ、y軸に沿った移動に制限される。このOHTシステム22は、例えば、天井に取付けられた容器格納棚にアクセスするのに、又は、搭載ポートにおける整列のための僅かな調節を行うのに用いられる。従来のOHT巻上げ機は、OHT巻上げ機を専用のx方向駆動機構に取付けること、又は、それをベイ又は半導体製造設備(fab)幅のOHTシステムの一部として取付けることのいずれかによって構成される。従来のOHT車両の多くは、FOUPをコンベヤと搭載ポートとの間で移送させる目的には必要ない追加の特徴及び複雑性を含むy方向駆動機構を有している。これらの特徴は、費用を増大させて信頼性を低下させる可能性があるが、暫定的搭載方法として受入れられる。
【0028】
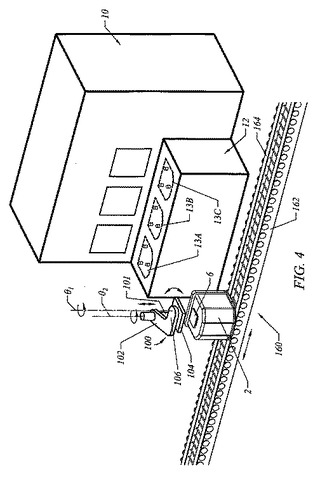
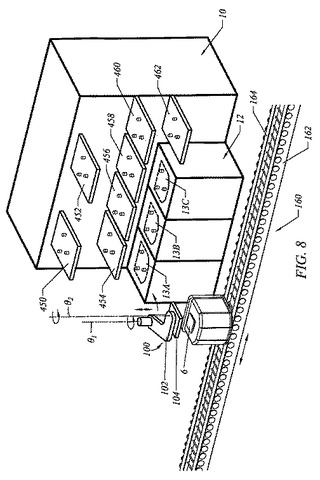
図4、図5、図6及び図7は、FOUP2をコンベヤ160と搭載ポート12との間で輸送するための容器移送装置100のいくつかの実施形態を示している。図4は、容器移送装置100の第1の実施形態を示している。容器移送装置100は、とりわけ、本体101と、アーム102と、把持器104とを有している。アーム102の近位端部は、本体101に回転可能に取付けられ、θ2軸を中心に回転する。把持器104は、アーム102の遠位端部に回転可能に取付けられ、θ1軸を中心に回転する。容器移送装置100は、アーム102のz軸に沿う垂直方向移動と、θ1軸及びθ2軸を中心とする回転移動とを協動させることにより、FOUP2をコンベヤ160と搭載ポート12の間で移動させる。
【0029】
説明目的だけのために、容器移送装置100の実施形態は、FOUPを処理ツール10とコンベヤ160との間で移動させる。当業技術で知られているその他の輸送システム(例えば、RGV、AGV等)によって、FOUPを設備全体に輸送することも本発明の範囲内である。図4は、第1のレール162及び第2のレール164を有するコンベヤ160を示している。限定するわけではないが、ベルトコンベヤ等のその他の種類のコンベヤを用いることも本発明の範囲内である。いずれにせよ、コンベヤは、図4の矢印によって指示するように、FOUP2を上流方向及び下流方向の両方向に移動させることが好ましい。
【0030】
FOUP移送装置100は、コンベヤ160に沿い且つ取出し及び配置のための装置を必要とする任意の箇所に配置され、例えば、貯蔵器、測定ツール、格納棚、その他に隣接して配置される。本体101は、好ましくは、搭載ポート12とコンベヤ160との間に配置される。1つの実施形態では、FOUP移送装置100の本体101は、3つの移動プレート13A〜13Cの全てを使用するために、x軸に沿って(例えば、コンベヤ160と平行に)コンベヤ160と搭載ポート12との間を上流方向と下流方向の両方向に移動するのがよい。本体101はまた、設備の床に取付けられ、単一の移動プレート13を使用するだけの移送装置を構成してもよい。容器移送装置100はまた、レール162に隣接してコンベヤ160の両側に配置されてもよい。容器移送装置100がコンベヤ160と搭載ポート12との間に配置される場合、容器移送装置100は、搭載ポート12をコンベヤ160から離して位置決めする距離を最小にするために、できるだけ小型であることが好ましい。
【0031】
図4に示すアーム102は、単一の剛性構造体で構成される。しかしながら、アーム102はまた、2つ以上の要素を有していてもよく、これらの要素は、均一な高さレベルを有していてもよいし、有していなくてもよい。好ましい実施形態では、把持器104は、アーム102の遠位端部106に回転可能に取付けられる。把持器104は、アーム102の他の部分に固定されてもよい。移送装置100がFOUP2をコンベヤ160と搭載ポート12との間で移動させるときに、把持器104を回転させることにより、移送装置100がFOUPのドアを処理ツールの前面と実質的に平行に維持することを可能にする。回転式の把持器はまた、FOUP2を移動プレート13の上に下降させて位置決めする前、移送装置100により、FOUP2を移動ピンと整列させることを可能にする。例えば、FOUP2は、移動方向に面するFOUPのドアと共にコンベヤ160に沿って移動する。この場合、移送装置100がFOUP2を搭載ポート12の上に位置決めする前にFOUPドアがポートドアに面するように、FOUP移送装置100は、FOUPを90°回転させなければならない。
【0032】
FOUP2は、例えば、x軸方向移動、z軸方向移動、並びにθ1及びθ2軸を中心とする回転を協動させることによって、例えば、各箇所の間(例えば、位置Aから位置Bを通って位置Cまで)の流体弧(例えば、非直線経路)又は直線移動に沿ってコンベヤ160と搭載ポート12の間を移動する。容器移送装置100は、単一の搭載ポートだけを使用してもよいし、複数の搭載ポートを使用してもよい。多数の搭載ポートを使用するために、容器移送装置100は、x軸方向駆動装置(図示せず)に取付けられ、その結果、本体100が搭載ポートとコンベヤとの間に位置する空間内をコンベヤと実質的に平行に移動する。容器移送装置100がこのようなx軸方向駆動装置に取付けられている場合、容器移送装置100は、FOUP2をコンベヤ160と任意の移動プレート13A、13B、13Cとの間で移動させてもよい。容器移送装置100はまた、限定するわけではないが、RGV、AGV、PGV等のその他の輸送装置にFOUPを搭載したりそれから取出したりしてもよい。
【0033】
図5は、容器移送装置200を示している。この実施形態では、容器移送装置200は、1対の垂直支持体206と、1対のアーム202と、把持器204とを有し、各アーム202は、垂直支持体206に回転可能に取付けられている。この実施形態では、把持器204は、各アーム202の遠位端部208に回転可能に取付けられ、θ3軸を中心に回転する。各アーム202は、垂直支持体206に対してθ4軸212を中心に回転する。アーム202は、単なる一例としてリードネジによって、垂直支持体206を垂直方向に上下移動させる。把持器204を上昇及び下降させるその他の機構も本発明の範囲内である。回転アーム及び垂直支持体の数は、変更することができ、図5に示す実施形態に制限されない。
【0034】
把持器204によって保持されたFOUP2は、弧214(点線によって示す)に沿ってコンベヤ160と搭載ポート12との間で移送される。z軸に沿った協動移動及びθ軸を中心とする回転移動により、コンベヤと搭載ポートの間の移動の任意の数の弧又は経路を構成することができる。この移動は、アーム202の垂直方向移動と、θ3軸及びθ4軸を中心として回転する回転支持体202及び把持器204との組合せによって達成される。単一のモータ機構がθ3軸及びθ4軸を中心とする移動を制御すること、即ち、θ3軸及びθ4軸を制御する単一モータを有することも本発明の範囲内である。
【0035】
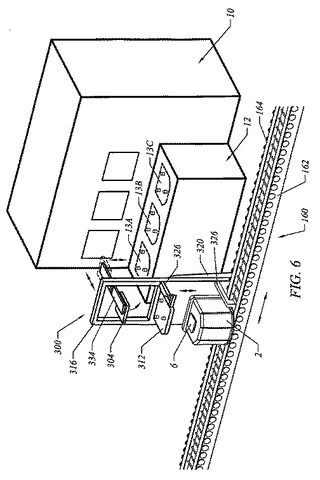
図6は、容器移送装置300を示している。この実施形態では、移送機構334は、「Asyst Technologies、Inc.」に譲渡された「直接搭載ツール」という名称の米国特許出願出願番号第11/064、880号に開示された搭載ポートの実施形態に組み込まれ、かかる米国特許出願を本明細書に援用する。容器移送装置300は、「直接搭載ツール」搭載ポートの多くの特徴を有し、かかる特徴は、移動プレート312と、それをコンベヤ160とプレート316内の開口314との間で垂直方向に移動させるための駆動アセンブリ320である。摺動機構334が、単なる例示として、把持器304を移動させるためのリードネジ、プーリ、ベルト駆動装置等を有している。
【0036】
直接搭載ツールと同様、プレート316は、実質的に、コンベヤ160と搭載ポート12の間の垂直平面内に配置されている。移動プレート312は、それが図6に示すように下降位置まで移動させられているとき、コンベヤレール162とコンベヤレール164との間に入る。図6に示す実施形態は、片持ちアーム326を有し、この片持ちアーム326は、コンベヤ160に沿って移動するFOUPが容器移送装置300によって妨げられずに通ることを防止する。しかしながら、アーム326が、コンベヤ160に沿って移動するFOUP2が移動プレート312の上を妨げられずに通過することを可能にする構成(例えば、アーム326が、コンベヤ160のレール164を貫くように通る)を有することができることも本発明の範囲内である。
【0037】
移送機構334は、開口314を貫いて延びるプレート316に取付けられている。移送機構334は、とりわけ、移動プレート312と移動プレート13との間のトラック又は軌道336に沿って摺動する把持器304を有している。把持器304は、FOUP2をその上部ハンドル6のところで保持する。FOUP2はまた、FOUPの側面ハンドル4又は底面を含むその他のFOUPの構成のところで把持器304によって保持されてもよい。把持器304はまた、FOUPを垂直方向に上昇させたりそれを移動プレートの上に下降させたりしてもよい。
【0038】
作動時、駆動アセンブリ320は、最初、移動プレート312をコンベヤ160まで下降させる。FOUPを移動プレート312の上に載せたら、駆動アセンブリ320は、移動プレート312を上昇させ、移動プレート312は、FOUP2をコンベヤ160から引離すように開口314まで持上げる。次に、把持器304は、僅かに下方へ移動し、FOUPの上部ハンドル6を把持する。次に、把持器304は、上方へ移動してFOUP2を移動プレート312から引離すように持上げる。次に、把持器332は、FOUPを移動プレート13の上の位置まで水平方向に移動させ、FOUPを移動プレートの上に下降させる。
【0039】
プレート316は、3つの移動プレート13A、13B、13Cの全てを使用するために、FOUP移送装置300全体をx軸に沿って(例えば、コンベヤと平行に)移動させる機構に取付けられるのがよい。又は、プレート316は、単一の移動プレート13を使用するだけの静止構造体を有していてもよい。
【0040】
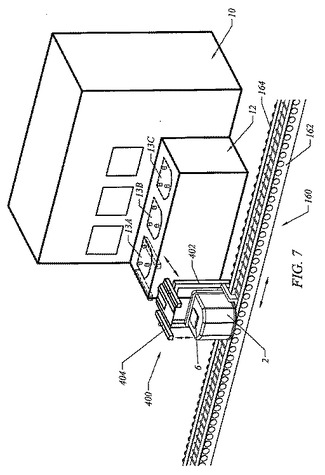
図7は、FOUP移送装置400を示している。この実施形態では、FOUP移送装置400は、z軸方向摺動機構402と、y軸方向摺動機構(図示せず)と、FOUP支持体404を有している。この実施形態では、各FOUP支持体404は、FOUP支持体404がFOUP2をコンベヤ160から引離して持上げるときにFOUP2の底面に係合する位置決めピンを有している。z軸方向摺動機構402は、FOUP支持体404を、FOUP支持体404がコンベヤ160に収容される位置と上昇高さレベルとの間で移動させる。y軸方向摺動機構は、FOUP2を搭載ポート12に搭載し及び/又はそれから取出すことができるように、FOUP支持体404を上昇位置と搭載ポートとの間で移動させる。
【0041】
作動時、z軸方向摺動機構402は、FOUP支持体404を下降位置まで移動させ、それにより、コンベヤ160上を移動するFOUP2は、FOUP支持体404の上を妨害なしに通過する。1つの実施形態では、コンベヤレール164は、それを通過させるように各FOUP支持体404を収容する切欠きを含む。FOUP2がFOUP支持体404上で停止した後、z駆動機構は、FOUP支持体404を上昇させ、FOUP2をコンベヤ160から第1の高さレベルまで垂直方向に持上げる。上昇位置は、好ましくは、FOUPを移動プレート13の真上の箇所まで移動させたときにFOUP2の底部が移動ピン18と接触しない位置である。次に、y軸方向摺動機構は、FOUP2を処理ツール10に向かって水平方向に移動させ、FOUP2を移動プレート13の真上に配置する。FOUP支持体404は、FOUP2を移動プレート13の上に搭載した後にy軸方向摺動機構404が容易に引っ込むことができるように、好ましくは、移動プレート13よりも広く離間している。図7に示すインタフェース機構400はまた、コンベヤ160と平行にインタフェース機構400全体を移動させ、複数の搭載ポート及び/又は単一搭載ポートの複数の移動プレートを使用するようにx軸方向駆動機構に取付けられていてもよい。
【0042】
図8、図9及び図10は、容器移送装置によってアクセス可能な格納棚の様々な配置を示している。説明目的のために、図4に示す容器移送装置100だけを説明する。しかし、本出願に開示されたその他の移送機構又はそれらと同等の機構を用いることも本発明の範囲内である。図8〜図10は、格納棚が、移動ピンを有する移動プレートと同様であることを示している。しかしながら、格納棚は、容器を支持する任意の形態を有していてもよい。
【0043】
図8は、格納棚450〜462を示し、格納棚450〜462の各々は、処理ツール10の正面に取付けられている。格納棚450〜460は、処理ツール10の開口の上方及び移動プレート13A、13B、13Cの上方に配置されている。格納棚462は、移動プレート13Cと隣接して配置されている。容器移送機構100は、FOUP2をコンベヤ160から取出してそれを任意の格納棚450〜462の上に配置するように、好ましくは、x方向及びz方向の移動範囲を有している。処理ツール10は、任意の数の格納棚を有する。更に、格納棚は、この処理ツール又は設備内の任意その他の処理ツールに用いられるFOUPを受入れる。
【0044】
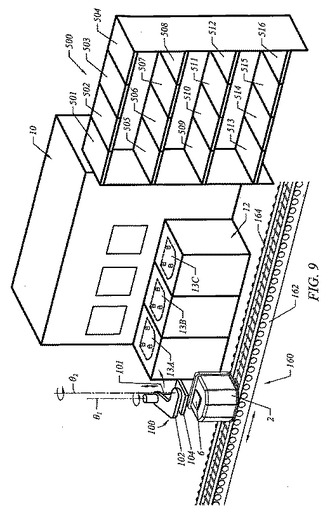
図9は、FOUP移送装置100が、処理ツール10に隣接して配置された格納棚501〜516にアクセス可能なことを示している。格納棚501〜516は、処理ツール10に特に関連した容器格納のために又は一般の格納に用いられる。容器移送機構100はが、格納棚の任意の1つに格納されたFOUP2にアクセスすることができてもよいし、別々の移送機構が、FOUPSを格納棚に入れたりそれから出したりするように専用化されていてもよい。専用搭載機構は、独立の格納システムとして、FOUPをコンベヤ160と格納棚501〜516の任意の1つとの間を移送するに過ぎない。
【0045】
図10は、格納棚601及び602がコンベヤ160の真上に配置されていることを示している。これらの格納棚601、602は、FOUPを手作業で搭載するオペレータ、又は、FOUPを搭載するOHTシステムのいずれかのための搭載ステーション、且つ/又は、緩衝及び格納のための搭載ステーションを提供する。格納棚601、602は、搭載ポート12の直ぐ前に配置されるのがよい。しかしながら、コンベヤ160から搭載ポート12へのアクセスのいくつかの組合せは、制限される場合がある。例えば、処理ツール10は、例えば格納棚601、602と類似の3つの手動搭載ステーションを有し、各手動搭載ステーションは、移動プレート13A、13B、13C等の移動プレートの前に配置される。この場合、移動プレート又は搭載ステーションのいずれかの上に配置されるFOUPの上に別のFOUPを持上げることができない移送装置100は、FOUPが第1の移動プレート13A及び最後の移動プレート13Cの上に配置され且つ第1の搭載ステーション601及び最後の搭載ステーション603の上に配置されると、中間の搭載ステーションにアクセスすることはできない。しかしながら、このことは決して起こり得ない。と言うのは、搭載ステーションの前に配置され且つFOUPに対応する移動プレートが空いているときにだけ、FOUPが手動搭載ステーションの上にしばしば配置されるからである。
【0046】
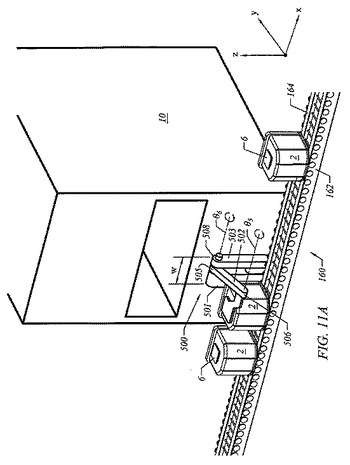
図11A〜図11Cの各々は、ツール搭載装置500を示している。ツール搭載装置500は、とりわけ、ハウジング501に包囲されたz駆動アセンブリと、ショルダ部503と、アーム502と、把持器504とを有している。この実施形態では、ショルダ部503は、細長い構造体であり、z方向駆動アセンブリと連結された基部510と、遠位端部512とを有している。z方向駆動機構は、単なる例示として、リードネジ、ラック及びピニオン装置、又はベルト駆動装置を有している。ショルダ部503は、ハウジング501の基部516と遠位端部518との間を実質的に垂直方向に移動する。
【0047】
アーム502の近位端部505は、ショルダ部503の遠位端部512と回転可能に連結され、θ6軸を中心に回転する。ショルダ部503は、例えば、アーム502の回転移動を制御するためのハーモニック駆動装置又はギヤ駆動装置を有している。アーム502の近位端部505をショルダ部503の遠位端部508に取付けることにより、ショルダ部503が図11Aに示す最も低い下降位置に配置されるとき、θ6軸(又は手首継手)を所定の高さレベルに予め位置決めする。かくして、ツール搭載装置500は、例えば搭載ポート棚の900mmの高さレベルよりも低い、高さレベルを低くしたハウジング501を有する。ショルダ部503の基部510は、ショルダ部503の遠位端部512よりも広く、それにより、アーム502の近位端部505がショルダ部503とハウジング501との間で回転する。この特徴は、ツール搭載装置500の幅Wができるだけ小型になることを可能にする。アーム502はまた、ショルダ部503の外側(図11A〜図11Cに示した側の反対側)に回転可能に取付けられてもよい。
【0048】
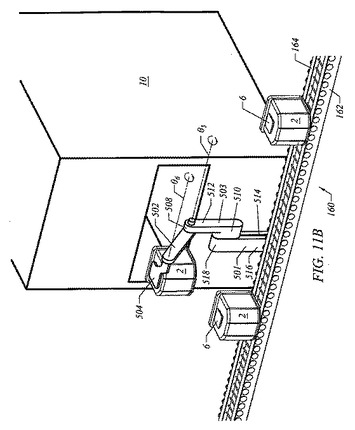
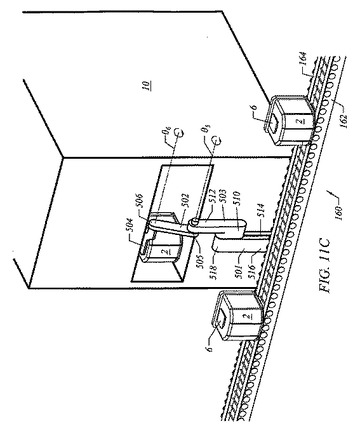
アーム502の移動範囲は、好ましくは、図11Aに示す位置(FOUP2をコンベヤ160に対して搭載し/取出す)と、図11Cに示す位置(FOUP2を処理ツール10に対して搭載/取出しする)との間でアーム502を少なくとも移動させるのに十分大きい。1つの実施形態では、アーム502の好ましい移動範囲は、45°〜190°であり、ここで、0°は、アーム502の遠位端部506を処理ツールに直接向けることであり、例えば、アーム502は、実質的に水平である。
【0049】
把持器504は、アーム502の遠位端部506に回転可能に取付けられ、θ5軸を中心に回転する「肘」形継手を構成する。1つの実施形態では、θ5軸は、独立した軸ではなく、アーム502に直接関連して回転する把持器504を構成する。把持器504の回転は、例えば、アーム502の中を通って移動するベルト、チェーン又はバンドを介してアーム502の回転に直接リンクされるのがよい。把持器504はまた、アーム502を独立に回転させてもよい。いずれにせよ、θ5軸及びθ6軸を中心とする回転は、好ましくは、FOUP2内に格納されたウェーハが常に水平を維持することを保証するように調整される。
【0050】
作動時、アーム502は、好ましくは、コンベヤ160の上を移動するFOUP2がツール搭載装置500によって妨げられずに通ることを可能にするアイドリング位置等の任意の位置に静止する。FOUP2がツール搭載装置500の正面のコンベヤ160上で停止した後、アーム502を、下向きに回転させ、把持器504を、コンベヤ160上に着座したFOUP2の上部ハンドル6と接触させる(図11A参照)。この実施形態では、次に、把持器504は、FOUP2の上部ハンドル6を把持する。把持器504は、限定するわけではないが、FOUP2の側面ハンドル又は底面等のFOOUP2のその他の部分を把持することも本発明の範囲内である。ショルダ部503による垂直方向移動とアーム502の回転との組合せにより、ツール搭載装置500は、FOUP2をコンベヤ160から引離すようにそれを移動させ始める(図11B参照)。上述したように、この協働移動は、ウェーハの損傷を防止するために、好ましくは、FOUP内に配置されたウェーハを実質的に水平の向きに維持して、ウェーハの損傷を防止する。図11Cは、FOUP2を搭載ポート又は処理ツール棚の上に配置するツール搭載装置500を示している。ツール搭載装置500は、FOUP2をコンベヤ160とハウジング501の遠位端部518の上方の処理ツール10との間で移動させる。ツール搭載装置500はまた、FOUP2をRGV、AGV、PGV等のその他の輸送システムに搭載したりそれから取出したりするように構成されてもよい。
【0051】
ツール搭載装置500のハウジング501及びショルダ部503は、好ましくは、コンベヤ160と処理ツール10との間に配置される。この配置であれば、ツール搭載装置500は、x軸に沿って、即ち、コンベヤ160と平行に移動するように構成されるのがよい。x軸方向駆動機構(図12〜図13参照)は、限定するわけではないが、ラック及びピニオンシステム又はプラスチックタイヤ摩擦駆動装置等の当業技術で既知の任意の機構を有しているのがよい。
【0052】
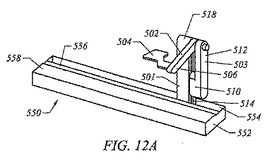
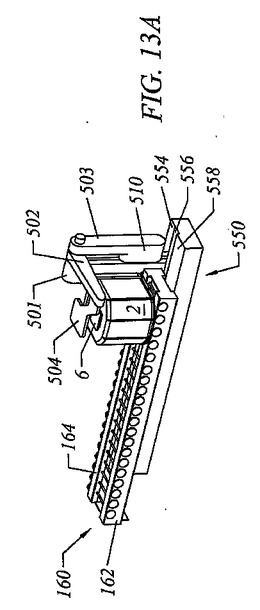
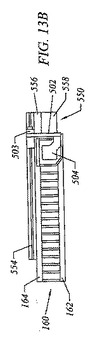
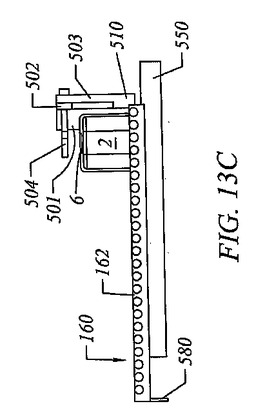
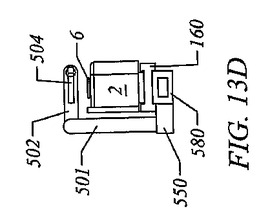
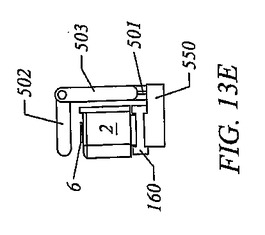
図12〜図13は、x方向駆動アセンブリ550を示すと共に、x方向駆動アセンブリ550とコンベヤ160との間の関係を示している。x方向駆動アセンブリ550は、ハウジング552を有し、このハウジング552は、ツール搭載装置トラック554、様々なコンベヤ支持体及び/又は位置合わせ部556及び558を有している。ツール搭載装置500が、例えば単一の搭載ポートを使用するだけの固定装置である場合、この実施形態では、搭載ポートを通るコンベヤ160の部分は、コンベヤ支持ブラケット580によって支持される(図13C及び図13D参照)。コンベヤ支持ブラケット580は、コンベヤ160を設備の床から離すように上昇させている。ツール搭載装置500が複数の搭載ポートを使用する場合、x方向駆動アセンブリ550は、これらの搭載ポートの各々を通り過ぎるコンベヤ160の部分の下に配置される。x方向駆動アセンブリ550の長さは、変更してもよく、ツール搭載装置がx方向に移動しなければならない距離によって決定される。x方向駆動アセンブリ550のハウジング552は、コンベヤの部分を支持し、コンベヤ160のこの特定の部分をコンベヤ支持ブラケット580に置換する。
【0053】
x方向駆動アセンブリ550のハウジング552は、コンベヤ160をチャンネル556及び支持面558等の適所に保持する位置合わせ部を含んでいる。ハウジング552の特定の形態は、変更することができ、特定の種類のコンベヤ160に依存する。この実施形態では、コンベヤ160は、ハウジング552上に着座し、その結果、ツール搭載装置500のハウジング552及びx方向駆動アセンブリ550のハウジング501がコンベヤ160に隣接してスロット又はチャンネル554内をx方向に移動する。ツール搭載装置500のハウジング501は、x方向駆動アセンブリ550のハウジング552内に収容されたリードネジ等の駆動システムと連結される。限定するわけではないが、ベルト駆動又はラック及びピニオン歯車システム等の当該技術で既知のその他の機構も本発明の範囲内である。
【0054】
以上の説明の全ては、床ベースコンベヤについて説明したものである。しかしながら、コンベヤ160を、軌道搬送車(シャトル)に置換してもよいと考えられる。コンベヤと搭載ポートとの間のFOUP輸送のための上述した機構及び処理は、説明目的だけのものであり、本発明は、それによって限定されないことを認識すべきである。HOUP輸送のための方法及びシステムの好ましい実施形態を説明したが、当業者には、システムに一定の利点が達成されることが明らかなはずである。様々な修正例、適応例、及びその変形実施形態を、本発明の範囲及び精神の範囲内で実施することができることも認識すべきである。例えば、コンベヤの使用は、半導体製造設備内で示されたが、上述した本発明の概念の多くは、他の非半導体製造用途の使用に対して等しく適用可能であると考えられることは明らかである。
【図面の簡単な説明】
【0055】
【図1】本発明の実施形態の概略図である。
【図2】Y軸方向に移動する巻上げ機を示す本発明の別の実施形態の概略図である。
【図3】片持ち式の第2の巻上げ機構を有する巻上げ機を示す本発明の更に別の実施形態の概略図である。
【図4】移送アーム機構の実施形態を示す本発明の実施形態の斜視図である。
【図5】移送アーム機構の別の実施形態を示す本発明の実施形態の斜視図である。
【図6】移送アーム機構の更に別の実施形態を示す本発明の実施形態の斜視図である。
【図7】移送アーム機構の更に別の実施形態を示す本発明の実施形態の斜視図である。
【図8】追加の格納棚を備えた処理ツールを有する図5に示す実施形態の斜視図である。
【図9】処理ツールに隣接した追加の格納箇所を有する図5に示す実施形態の斜視図である。
【図10】実質的にコンベヤの上に配置された追加の格納棚を有する図5に示す実施形態の斜視図である。
【図11A】本発明の別の実施形態の斜視図である。
【図11B】本発明の別の実施形態の斜視図である。
【図11C】本発明の別の実施形態の斜視図である。
【図12A】x軸方向駆動アセンブリを示す本発明の別の実施形態の斜視図である。
【図12B】x軸方向駆動アセンブリを示す本発明の別の実施形態の斜視図である。
【図13A】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13B】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13C】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13D】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13E】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【技術分野】
【0001】
本出願は、2005年5月16日に米国特許商標局に出願の「コンベヤと半導体処理ツール搭載ポートの間のインタフェース」という名称の米国特許仮出願出願番号第60/681、354号に対して35U.S.C.§119(e)に従って優先権を請求するものである。
【0002】
本発明は、一般的に、材料取扱システムと処理ツールとの間で容器を移送するための移送機構を含む。
【背景技術】
【0003】
「前開き統合ポッド(FOUP)」及び「標準機械的インタフェース(SMIF)」ポッドのような容器を半導体製造設備内の処理ツール及び搭載ポートまで配送することは高価である。処理ツール間でFOUP又は底開き容器を配送する1つの方法は、オーバーヘッド輸送(OHT)システムである。OHTシステムは、FOUPを製造設備の床から約900mmの高さレベルで搭載ポートの移動プレートの上に下降させる。OHTシステムは、FOUPを例えば処理ツールの搭載ポートまで配送する高性能の天井据え付けトラック及びケーブル巻き上げ車両を用いる。水平移動、ケーブル巻き上げ延長、及び一方向作動の組合せは、処理ツール間でFOUPを迅速に輸送するために調整する必要がある。輸送車両は、最良の効率を得るには、処理ツールを搭載するか又は取出す必要がある瞬間に利用可能であるべきである。
【0004】
OHTシステムは、多くの場合、設備天井の一部分上に装着され、従って、処理ツール及び搭載ポートの上方に配置される。処理ツールが典型的に床据え付け機器であるので、OHTシステムは、製造設備内の自由空間を利用する。天井据え付けOHTシステムは、OHTトラックと、単に一例として、搭載ポートとの間のかなりの距離で容器を上げたり又は下げたりする必要がある。OHTシステムは、トラックに沿ったFOUPの移動から生じるいかなる粒子も下に配置されるツールセクション上に落ちて潜在的にウェーハに損傷を与える場合があるので、好ましくは、非常に高い清浄度性能を有する。
【0005】
軌道搬送車(RGV)及び自動搬送車(AGV)は、多くの場合、容器を処理ツール間で設備の床に沿って移動させるために半導体製造設備で使用される。RGV及びAGVは、OHTシステムよりも保守目的でアクセスするのが容易であり、一般的に天井据え付けOHTシステムよりも費用がかからない。RGV又はAGVによって発生する粒子が搭載ポートの基準面の下に留まるので、粒子制御も簡素化される。しかし、RGV及びAGVは、半導体製造設備で非常に高価な価値のある床空間を占め、安全面の問題を呈する(例えば、ツールオペレータ及びRGVが、同じ空間で作業する)。
【0006】
半導体製造設備内の「自動材料取扱システム(AMHS)」コンベヤと処理ツールの間のインタフェースの例は、「Asyst Technologies、Inc.」に譲渡され「直接ツール搭載法」という名称の米国特許出願出願番号第11/064、880号に説明され、この米国特許出願を本明細書に援用する。例えば、「直接ツール搭載法」の発明の1つの実施形態は、半導体材料容器を処理ツールまで配送するコンベヤを含む。コンベヤは、好ましくは、搭載ポートの移動プレートの下に配置される。好ましい実施形態では、移動プレートは、実質的に垂直方向に移動して、容器をコンベヤと、処理ツールが容器に配置される材料にアクセスすることができる位置との間で移動する。
【発明の開示】
【発明が解決しようとする課題】
【0007】
全ての処理ツールが「直接搭載」ポートを用いることができるか、又はその使用を必要とすることになるとは限らない。実際に、単に一例として、「Asyst Technologies、Inc」に譲渡された「整列ピンなしFIMSインタフェース装置」という名称の米国特許第6、419、438号に開示された搭載ポートのような従来の搭載ポートに対して、床据え付けコンベヤをインタフェース装置で接続する必要性があることになる可能性が高く、この米国特許出願を本明細書に援用する。標準的な搭載ポートは、「SEMI BOLTS」インタフェース規格に適合することができるが、単体の前面据え付けプレートのような全てのBOLTS要件によっては制限されない。この説明で参照した標準的搭載ポートは、ポートドア、ドアリフト、又は移動プレートアセンブリに対して別々のモジュールを有することができると考えられる。重要な要件は、搭載ポートの移動プレートがSEMI規格によって説明した方法で容器を受け取ることができるということである。
【0008】
本明細書は、上述のコンベヤから処理ツール上の標準搭載ポートへの容器の搭載を容易にする本発明の説明である。コンベヤはまた、本発明では床の少し上方又は床の少し下方に据え付けることができると考えられる。
【課題を解決するための手段】
【0009】
本発明の1つの側面は、材料輸送システムと従来の搭載ポートの間に置くことができるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、床据え付けコンベヤと処理ツールの搭載ポートとの間に配置される。別の実施形態では、ツール搭載装置は、AGVの経路と処理ツールの搭載ポートとの間に配置される。別の実施形態では、ツール搭載装置は、RGVのレールと処理ツールの搭載ポートとの間に配置される。
【0010】
本発明の別の側面は、単一搭載ポート又は複数の搭載ポートを使用することができるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置の本体は、静止しており、単一の搭載ポートだけを使用できる。別の実施形態では、ツール搭載装置が複数の搭載ポート間を横方向に移動することができるように、ツール搭載装置の本体がx方向駆動アセンブリと連結される。
【0011】
本発明の更に別の側面は、容器を搭載ポートと材料輸送システムの間で効率的に移動させるツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、実質的にz軸及びθ軸に沿った移動だけによって容器を搭載ポートとコンベヤの間で移送する単一剛性構造体を含む。別の実施形態では、ツール搭載装置は、垂直に調節可能なショルダ部に対して回転することによって、容器を搭載ポートと材料輸送システムとの間で移動させるアームを含む。
【0012】
本発明の更に別の側面は、既存の材料輸送システムと容易に統合するツール搭載装置を提供することである。1つの実施形態では、ツール搭載装置は、材料輸送システムの部分を支持するx方向駆動アセンブリに連結され、ツール搭載装置の容易な設置を提供する。例えば、x方向駆動アセンブリは、x方向駆動アセンブリの上を移動する材料輸送システムを支持するハウジング内に包囲される。
【0013】
本発明の別の側面は、OHTシステム又は他の材料輸送システムが容器をツール搭載装置に配置/除去することを可能にするツール搭載装置を提供することである。例えば、ツール搭載装置は、容器の底面によって容器を支持することができ、それによってOHTシステムは、容器をツール搭載装置上の待機位置に置くことができる。
【発明を実施するための最良の形態】
【0014】
「半導体製造装置材料協会(SEMI)」は、半導体ウェーハ製造装置に対する規格を作成した(http://www.semi.org参照)。「SEMI規格」は、半導体製造装置に対する許容できる公差及びインタフェースを規定するものである。本明細書に説明する本発明は、FOUPを取り扱うための半導体製造装置に限定されない。
【0015】
単なる一例として、本発明の様々な実施形態はまた、SMIFポッド、レチクル容器、フラットパネルディスプレイ輸送装置、又は任意の他の前開き又は底開き容器又は処理ツールを処理するためのシステムに用いることができ、及び/又はそれに適応させすることができる。容器は、以下に制限されるものではないが、半導体基板を含む物品を支持するための任意の種類の構造体として定義される。単に一例として、容器は、物品にアクセス可能な開放容積を含む構造体(例えば、FPD輸送)、又は機械的に開放可能なドアを有する容器(例えば、底開きSMIFポッド及びFOUP)を含む。搭載ポートは、容器を取り扱うインタフェース機器として定義される。しかし、本発明を説明する目的のために、FOUP及び底開き容器を取り扱うための搭載ポートだけを本明細書で以下に参照する。
【0016】
図1〜図3は、容器を床据え付けコンベヤと処理ツールの搭載ポートとの間で移動させるための様々なシステムを概略的に示している。図1〜図3の各システムは、容器を4つの主な箇所、即ち、位置A、B、C、Dの間で移動させることを例示している。これらの箇所は、本発明の様々な実施形態を説明するために本出願を通じて用いられる。
【0017】
図1は、FOUP2を示し、FOUP2は、コンベヤ160の上に着座し(位置A)、搭載ポート12の移動プレート16の上に着座し(位置C)、オーバーヘッド輸送(OHT)車両22によって把持される(位置D)。位置Bは、コンベヤ160と搭載ポート12との間の中間移送段階、又は、FOUP格納箇所のいずれかを表す(図10参照)。後に説明する単一の容器移送装置、例えばロボットは、好ましくは、FOUP2を位置A、B及びCの間で移動させる(図4〜図7参照)。
【0018】
この実施形態では、処理ツール10及びコンベヤ160は各々、床ベース要素である。図1に示すコンベヤ160は、代表例に過ぎない。床ベースコンベヤは、一般的に、処理ツール10のための搭載高さレベルよりも低い高さレベルで容器を輸送する任意の容器輸送システム(例えば、コンベヤ、AGV、RGV)を表している。従来の搭載ポート12は、処理ツール10に取付けられている。また、これらの要素の各々は、設備内の他の位置に配置されてもよく、例えば、コンベヤ160は、設備の床18の下に配置されていてもよいし、床よりも上に上昇させられていてもよい。OHT車両22は、好ましくは、設備の天井20に固定された駆動レール24に沿って移動する。図1は、この実施形態のOHT駆動レール24がx方向、例えば、コンベヤ160と平行な方向に沿う向きに配置されていることを示す。OHT車両22は、FOUP2をその上部ハンドル6のところで保持するための把持機構30を有している。例えば、FOUPを、その側面ハンドル4又は下部フランジによって保持することも本発明の範囲内である。OHT車両22は、把持機構30を格納式懸架ケーブル18によって垂直方向に移動させる。本発明を説明する目的だけのために、格納式ケーブルは、ケーブル、ベルト、バンド、又はこれらの品目の任意の組合せを含むが、それに限定されるわけではない。
【0019】
従来の搭載ポート12は、しばしば、移動プレート16を含み、移動プレート16は、その上にFOUPを整列させる移動ピンを有している。これらの移動ピンは、移動プレート16から上方に延びている。FOUPの底面は、FOUP2が移動プレート16上に位置決めされた時に移動ピンを受入れる3つの整列用受け部を有している。従って、FOUP2が移動プレート16上に位置決めされる前に、FOUP2を移動ピンとほぼ整列させる必要がある。FOUP2を移動ピンのところに配置したり、FOUP2を移動ピンから取外したりするために、FOUP移送装置は、位置Cに配置されたFOUP2を垂直方向に移動させるように構成されている。
【0020】
各FOUP移送装置はまた、FOUP2を任意の数の移動経路に沿って位置Bと位置Cの間を移動させる。例えば、移動経路は、非直線弧(図5参照)であってもよいし、実質的に直線の経路(図6参照)に沿っていてもよい。いずれにせよ、FOUP移送装置は、FOUP2を、単なる例示としては、FOUPの上部ハンドル6、側面ブラケット22、FOUPの下部プレートの側縁、又はFOUPの下部を、例えば移動ピン支持体の領域の外側の側縁に隣接して保持するのがよい。FOUP2を保持する各方法は、好ましくは、FOUPをコンベヤ160から搭載ポート12の移動プレート16まで直接移送することができるように、FOUPの底面の整列形態を妨げず、FOUPは、その底面で支持された状態で静止している。
【0021】
容器移送装置はまた、待機位置、例えば位置Bを有し、待機位置において、容器移送装置はFOUPなしに待機し、例えば、容器移送装置は、容器を位置A、B、Cの間で移動させない。この待機位置は、オペレータ又は配送車両が、FOUPをコンベヤの上方の便利な箇所にある移送装置の上に配送することを可能にする。例えば、FOUPを搭載ポート12上に配置するために、オペレータは、コンベヤ10上に手を伸ばす必要はない。その代わりに、オペレータは、FOUPを、コンベヤ160の真上に配置された格納棚又は容器搭載装置の上に配置する。
【0022】
OHTシステム22は、FOUPを処理ツール10の搭載ポート12に配送する追加の方法を提供し、この方法は、設備の処理量を増大させる。図1は、処理ツールの搭載ポート12と実質的に垂直方向に整列したOHT車両26を示している。OHTシステム22は、設備天井20に固定されたレール24と、レール24に沿って移動するOHT車両26と、ケーブル28によって上げ下げされる把持器30とを有している。OHTシステム22を搭載ポート12と整列させることにより、OHTシステム22が、FOUP2を移動プレート16上に直接下降させ且つ/又はFOUP2を移動プレート16から取出すことを可能にする。
【0023】
処理ツールが、「Asyst Technologies、Inc.」に譲渡された「直接搭載ツール」という名称の米国特許出願出願番号第11/064、880号に開示された搭載ポートと類似の搭載ポートを含むことも本発明の範囲内であり、かかる米国特許を本明細書に援用する。「直接搭載ツール」が用いられる場合、OHTシステム22が、「直接搭載ツール」のFOUP前進プレートを使用してもよい。
【0024】
図2は、本発明で作動させることができるOHTシステム22の別の実施形態を示している。この実施形態では、OHTシステム22は、OHT車両26を位置Eと位置Fの間で移動させるY軸方向駆動装置32を有している。OHTシステム22は、OHT車両26が位置Eに配置されている間、コンベヤ160上のFOUP2を取出したりFOUP2をコンベヤ160の上に配置したりするように位置決めされる。OHTシステム22は、OHT車両26が位置Fに配置されている間、搭載ポート12上のFOUP2を取出したりFOUP2を搭載ポート12の上に配置したりするように位置決めされる。
【0025】
作動時、OHTシステム22は、位置AのFOUP2を持上げ、それを位置Bまで更に持上げ、次いでFOUP2を位置Cまで水平方向に移動させ、最後にFOUP2を搭載ポート12(位置D)の上に下降させることによって、FOUP2をコンベヤ160と処理ツール10との間で移動させる。これらの位置A〜Dは、代表的なものに過ぎない。実際の位置A〜Dは、変更されてもよく、例えば、最初に容器をコンベヤから図2に示す高さレベルよりも高い高さレベルの位置Bまで上昇させてもよい。逆の移動シーケンス(例えば、位置Dから位置C及び位置Bを通って位置Aまで)により、FOUP2を搭載ポート12からコンベヤ160まで移送して戻す。これらの位置の間の経路は、当業技術で知られている任意の方法で達成される。例えば、移動経路のいくつか又は全てが重なってもよいし、位置Aから位置Dまでの湾曲した移動経路を構成してもよい。各移動経路は、異なる別々の経路である必要はない。実際、上記位置の間の移動経路を重ねることにより、搭載ポート12とコンベヤ160との間の全体の移送時間を短縮させる。
【0026】
図2は、好ましい実施形態において、位置B又は位置Cのいずれかに配置されるFOUP2の底面が、位置Dに配置されるFOUP2の上部ハンドル6よりも高い高さレベルに配置されることを示している。しかしながら、この特徴は、FOUP2を搭載ポート12とコンベヤ160との間で移送させるのに必要ない。実際、FOUP2を位置Cから位置Dまで移動させる間、FOUPの底面の高さレベルは、移動プレート上の任意の障害物、例えば移動ピン(図示せず)又はその他の整列要素の上を通過するのに十分な高さレベルが必要であるに過ぎない。
【0027】
図3は、OHT車両26が、格納式ケーブル32を支持するための片持ち機構36を有していることを示す。片持ち機構36は、OHT車両26に取付けられ、y軸に沿った移動に制限される。このOHTシステム22は、例えば、天井に取付けられた容器格納棚にアクセスするのに、又は、搭載ポートにおける整列のための僅かな調節を行うのに用いられる。従来のOHT巻上げ機は、OHT巻上げ機を専用のx方向駆動機構に取付けること、又は、それをベイ又は半導体製造設備(fab)幅のOHTシステムの一部として取付けることのいずれかによって構成される。従来のOHT車両の多くは、FOUPをコンベヤと搭載ポートとの間で移送させる目的には必要ない追加の特徴及び複雑性を含むy方向駆動機構を有している。これらの特徴は、費用を増大させて信頼性を低下させる可能性があるが、暫定的搭載方法として受入れられる。
【0028】
図4、図5、図6及び図7は、FOUP2をコンベヤ160と搭載ポート12との間で輸送するための容器移送装置100のいくつかの実施形態を示している。図4は、容器移送装置100の第1の実施形態を示している。容器移送装置100は、とりわけ、本体101と、アーム102と、把持器104とを有している。アーム102の近位端部は、本体101に回転可能に取付けられ、θ2軸を中心に回転する。把持器104は、アーム102の遠位端部に回転可能に取付けられ、θ1軸を中心に回転する。容器移送装置100は、アーム102のz軸に沿う垂直方向移動と、θ1軸及びθ2軸を中心とする回転移動とを協動させることにより、FOUP2をコンベヤ160と搭載ポート12の間で移動させる。
【0029】
説明目的だけのために、容器移送装置100の実施形態は、FOUPを処理ツール10とコンベヤ160との間で移動させる。当業技術で知られているその他の輸送システム(例えば、RGV、AGV等)によって、FOUPを設備全体に輸送することも本発明の範囲内である。図4は、第1のレール162及び第2のレール164を有するコンベヤ160を示している。限定するわけではないが、ベルトコンベヤ等のその他の種類のコンベヤを用いることも本発明の範囲内である。いずれにせよ、コンベヤは、図4の矢印によって指示するように、FOUP2を上流方向及び下流方向の両方向に移動させることが好ましい。
【0030】
FOUP移送装置100は、コンベヤ160に沿い且つ取出し及び配置のための装置を必要とする任意の箇所に配置され、例えば、貯蔵器、測定ツール、格納棚、その他に隣接して配置される。本体101は、好ましくは、搭載ポート12とコンベヤ160との間に配置される。1つの実施形態では、FOUP移送装置100の本体101は、3つの移動プレート13A〜13Cの全てを使用するために、x軸に沿って(例えば、コンベヤ160と平行に)コンベヤ160と搭載ポート12との間を上流方向と下流方向の両方向に移動するのがよい。本体101はまた、設備の床に取付けられ、単一の移動プレート13を使用するだけの移送装置を構成してもよい。容器移送装置100はまた、レール162に隣接してコンベヤ160の両側に配置されてもよい。容器移送装置100がコンベヤ160と搭載ポート12との間に配置される場合、容器移送装置100は、搭載ポート12をコンベヤ160から離して位置決めする距離を最小にするために、できるだけ小型であることが好ましい。
【0031】
図4に示すアーム102は、単一の剛性構造体で構成される。しかしながら、アーム102はまた、2つ以上の要素を有していてもよく、これらの要素は、均一な高さレベルを有していてもよいし、有していなくてもよい。好ましい実施形態では、把持器104は、アーム102の遠位端部106に回転可能に取付けられる。把持器104は、アーム102の他の部分に固定されてもよい。移送装置100がFOUP2をコンベヤ160と搭載ポート12との間で移動させるときに、把持器104を回転させることにより、移送装置100がFOUPのドアを処理ツールの前面と実質的に平行に維持することを可能にする。回転式の把持器はまた、FOUP2を移動プレート13の上に下降させて位置決めする前、移送装置100により、FOUP2を移動ピンと整列させることを可能にする。例えば、FOUP2は、移動方向に面するFOUPのドアと共にコンベヤ160に沿って移動する。この場合、移送装置100がFOUP2を搭載ポート12の上に位置決めする前にFOUPドアがポートドアに面するように、FOUP移送装置100は、FOUPを90°回転させなければならない。
【0032】
FOUP2は、例えば、x軸方向移動、z軸方向移動、並びにθ1及びθ2軸を中心とする回転を協動させることによって、例えば、各箇所の間(例えば、位置Aから位置Bを通って位置Cまで)の流体弧(例えば、非直線経路)又は直線移動に沿ってコンベヤ160と搭載ポート12の間を移動する。容器移送装置100は、単一の搭載ポートだけを使用してもよいし、複数の搭載ポートを使用してもよい。多数の搭載ポートを使用するために、容器移送装置100は、x軸方向駆動装置(図示せず)に取付けられ、その結果、本体100が搭載ポートとコンベヤとの間に位置する空間内をコンベヤと実質的に平行に移動する。容器移送装置100がこのようなx軸方向駆動装置に取付けられている場合、容器移送装置100は、FOUP2をコンベヤ160と任意の移動プレート13A、13B、13Cとの間で移動させてもよい。容器移送装置100はまた、限定するわけではないが、RGV、AGV、PGV等のその他の輸送装置にFOUPを搭載したりそれから取出したりしてもよい。
【0033】
図5は、容器移送装置200を示している。この実施形態では、容器移送装置200は、1対の垂直支持体206と、1対のアーム202と、把持器204とを有し、各アーム202は、垂直支持体206に回転可能に取付けられている。この実施形態では、把持器204は、各アーム202の遠位端部208に回転可能に取付けられ、θ3軸を中心に回転する。各アーム202は、垂直支持体206に対してθ4軸212を中心に回転する。アーム202は、単なる一例としてリードネジによって、垂直支持体206を垂直方向に上下移動させる。把持器204を上昇及び下降させるその他の機構も本発明の範囲内である。回転アーム及び垂直支持体の数は、変更することができ、図5に示す実施形態に制限されない。
【0034】
把持器204によって保持されたFOUP2は、弧214(点線によって示す)に沿ってコンベヤ160と搭載ポート12との間で移送される。z軸に沿った協動移動及びθ軸を中心とする回転移動により、コンベヤと搭載ポートの間の移動の任意の数の弧又は経路を構成することができる。この移動は、アーム202の垂直方向移動と、θ3軸及びθ4軸を中心として回転する回転支持体202及び把持器204との組合せによって達成される。単一のモータ機構がθ3軸及びθ4軸を中心とする移動を制御すること、即ち、θ3軸及びθ4軸を制御する単一モータを有することも本発明の範囲内である。
【0035】
図6は、容器移送装置300を示している。この実施形態では、移送機構334は、「Asyst Technologies、Inc.」に譲渡された「直接搭載ツール」という名称の米国特許出願出願番号第11/064、880号に開示された搭載ポートの実施形態に組み込まれ、かかる米国特許出願を本明細書に援用する。容器移送装置300は、「直接搭載ツール」搭載ポートの多くの特徴を有し、かかる特徴は、移動プレート312と、それをコンベヤ160とプレート316内の開口314との間で垂直方向に移動させるための駆動アセンブリ320である。摺動機構334が、単なる例示として、把持器304を移動させるためのリードネジ、プーリ、ベルト駆動装置等を有している。
【0036】
直接搭載ツールと同様、プレート316は、実質的に、コンベヤ160と搭載ポート12の間の垂直平面内に配置されている。移動プレート312は、それが図6に示すように下降位置まで移動させられているとき、コンベヤレール162とコンベヤレール164との間に入る。図6に示す実施形態は、片持ちアーム326を有し、この片持ちアーム326は、コンベヤ160に沿って移動するFOUPが容器移送装置300によって妨げられずに通ることを防止する。しかしながら、アーム326が、コンベヤ160に沿って移動するFOUP2が移動プレート312の上を妨げられずに通過することを可能にする構成(例えば、アーム326が、コンベヤ160のレール164を貫くように通る)を有することができることも本発明の範囲内である。
【0037】
移送機構334は、開口314を貫いて延びるプレート316に取付けられている。移送機構334は、とりわけ、移動プレート312と移動プレート13との間のトラック又は軌道336に沿って摺動する把持器304を有している。把持器304は、FOUP2をその上部ハンドル6のところで保持する。FOUP2はまた、FOUPの側面ハンドル4又は底面を含むその他のFOUPの構成のところで把持器304によって保持されてもよい。把持器304はまた、FOUPを垂直方向に上昇させたりそれを移動プレートの上に下降させたりしてもよい。
【0038】
作動時、駆動アセンブリ320は、最初、移動プレート312をコンベヤ160まで下降させる。FOUPを移動プレート312の上に載せたら、駆動アセンブリ320は、移動プレート312を上昇させ、移動プレート312は、FOUP2をコンベヤ160から引離すように開口314まで持上げる。次に、把持器304は、僅かに下方へ移動し、FOUPの上部ハンドル6を把持する。次に、把持器304は、上方へ移動してFOUP2を移動プレート312から引離すように持上げる。次に、把持器332は、FOUPを移動プレート13の上の位置まで水平方向に移動させ、FOUPを移動プレートの上に下降させる。
【0039】
プレート316は、3つの移動プレート13A、13B、13Cの全てを使用するために、FOUP移送装置300全体をx軸に沿って(例えば、コンベヤと平行に)移動させる機構に取付けられるのがよい。又は、プレート316は、単一の移動プレート13を使用するだけの静止構造体を有していてもよい。
【0040】
図7は、FOUP移送装置400を示している。この実施形態では、FOUP移送装置400は、z軸方向摺動機構402と、y軸方向摺動機構(図示せず)と、FOUP支持体404を有している。この実施形態では、各FOUP支持体404は、FOUP支持体404がFOUP2をコンベヤ160から引離して持上げるときにFOUP2の底面に係合する位置決めピンを有している。z軸方向摺動機構402は、FOUP支持体404を、FOUP支持体404がコンベヤ160に収容される位置と上昇高さレベルとの間で移動させる。y軸方向摺動機構は、FOUP2を搭載ポート12に搭載し及び/又はそれから取出すことができるように、FOUP支持体404を上昇位置と搭載ポートとの間で移動させる。
【0041】
作動時、z軸方向摺動機構402は、FOUP支持体404を下降位置まで移動させ、それにより、コンベヤ160上を移動するFOUP2は、FOUP支持体404の上を妨害なしに通過する。1つの実施形態では、コンベヤレール164は、それを通過させるように各FOUP支持体404を収容する切欠きを含む。FOUP2がFOUP支持体404上で停止した後、z駆動機構は、FOUP支持体404を上昇させ、FOUP2をコンベヤ160から第1の高さレベルまで垂直方向に持上げる。上昇位置は、好ましくは、FOUPを移動プレート13の真上の箇所まで移動させたときにFOUP2の底部が移動ピン18と接触しない位置である。次に、y軸方向摺動機構は、FOUP2を処理ツール10に向かって水平方向に移動させ、FOUP2を移動プレート13の真上に配置する。FOUP支持体404は、FOUP2を移動プレート13の上に搭載した後にy軸方向摺動機構404が容易に引っ込むことができるように、好ましくは、移動プレート13よりも広く離間している。図7に示すインタフェース機構400はまた、コンベヤ160と平行にインタフェース機構400全体を移動させ、複数の搭載ポート及び/又は単一搭載ポートの複数の移動プレートを使用するようにx軸方向駆動機構に取付けられていてもよい。
【0042】
図8、図9及び図10は、容器移送装置によってアクセス可能な格納棚の様々な配置を示している。説明目的のために、図4に示す容器移送装置100だけを説明する。しかし、本出願に開示されたその他の移送機構又はそれらと同等の機構を用いることも本発明の範囲内である。図8〜図10は、格納棚が、移動ピンを有する移動プレートと同様であることを示している。しかしながら、格納棚は、容器を支持する任意の形態を有していてもよい。
【0043】
図8は、格納棚450〜462を示し、格納棚450〜462の各々は、処理ツール10の正面に取付けられている。格納棚450〜460は、処理ツール10の開口の上方及び移動プレート13A、13B、13Cの上方に配置されている。格納棚462は、移動プレート13Cと隣接して配置されている。容器移送機構100は、FOUP2をコンベヤ160から取出してそれを任意の格納棚450〜462の上に配置するように、好ましくは、x方向及びz方向の移動範囲を有している。処理ツール10は、任意の数の格納棚を有する。更に、格納棚は、この処理ツール又は設備内の任意その他の処理ツールに用いられるFOUPを受入れる。
【0044】
図9は、FOUP移送装置100が、処理ツール10に隣接して配置された格納棚501〜516にアクセス可能なことを示している。格納棚501〜516は、処理ツール10に特に関連した容器格納のために又は一般の格納に用いられる。容器移送機構100はが、格納棚の任意の1つに格納されたFOUP2にアクセスすることができてもよいし、別々の移送機構が、FOUPSを格納棚に入れたりそれから出したりするように専用化されていてもよい。専用搭載機構は、独立の格納システムとして、FOUPをコンベヤ160と格納棚501〜516の任意の1つとの間を移送するに過ぎない。
【0045】
図10は、格納棚601及び602がコンベヤ160の真上に配置されていることを示している。これらの格納棚601、602は、FOUPを手作業で搭載するオペレータ、又は、FOUPを搭載するOHTシステムのいずれかのための搭載ステーション、且つ/又は、緩衝及び格納のための搭載ステーションを提供する。格納棚601、602は、搭載ポート12の直ぐ前に配置されるのがよい。しかしながら、コンベヤ160から搭載ポート12へのアクセスのいくつかの組合せは、制限される場合がある。例えば、処理ツール10は、例えば格納棚601、602と類似の3つの手動搭載ステーションを有し、各手動搭載ステーションは、移動プレート13A、13B、13C等の移動プレートの前に配置される。この場合、移動プレート又は搭載ステーションのいずれかの上に配置されるFOUPの上に別のFOUPを持上げることができない移送装置100は、FOUPが第1の移動プレート13A及び最後の移動プレート13Cの上に配置され且つ第1の搭載ステーション601及び最後の搭載ステーション603の上に配置されると、中間の搭載ステーションにアクセスすることはできない。しかしながら、このことは決して起こり得ない。と言うのは、搭載ステーションの前に配置され且つFOUPに対応する移動プレートが空いているときにだけ、FOUPが手動搭載ステーションの上にしばしば配置されるからである。
【0046】
図11A〜図11Cの各々は、ツール搭載装置500を示している。ツール搭載装置500は、とりわけ、ハウジング501に包囲されたz駆動アセンブリと、ショルダ部503と、アーム502と、把持器504とを有している。この実施形態では、ショルダ部503は、細長い構造体であり、z方向駆動アセンブリと連結された基部510と、遠位端部512とを有している。z方向駆動機構は、単なる例示として、リードネジ、ラック及びピニオン装置、又はベルト駆動装置を有している。ショルダ部503は、ハウジング501の基部516と遠位端部518との間を実質的に垂直方向に移動する。
【0047】
アーム502の近位端部505は、ショルダ部503の遠位端部512と回転可能に連結され、θ6軸を中心に回転する。ショルダ部503は、例えば、アーム502の回転移動を制御するためのハーモニック駆動装置又はギヤ駆動装置を有している。アーム502の近位端部505をショルダ部503の遠位端部508に取付けることにより、ショルダ部503が図11Aに示す最も低い下降位置に配置されるとき、θ6軸(又は手首継手)を所定の高さレベルに予め位置決めする。かくして、ツール搭載装置500は、例えば搭載ポート棚の900mmの高さレベルよりも低い、高さレベルを低くしたハウジング501を有する。ショルダ部503の基部510は、ショルダ部503の遠位端部512よりも広く、それにより、アーム502の近位端部505がショルダ部503とハウジング501との間で回転する。この特徴は、ツール搭載装置500の幅Wができるだけ小型になることを可能にする。アーム502はまた、ショルダ部503の外側(図11A〜図11Cに示した側の反対側)に回転可能に取付けられてもよい。
【0048】
アーム502の移動範囲は、好ましくは、図11Aに示す位置(FOUP2をコンベヤ160に対して搭載し/取出す)と、図11Cに示す位置(FOUP2を処理ツール10に対して搭載/取出しする)との間でアーム502を少なくとも移動させるのに十分大きい。1つの実施形態では、アーム502の好ましい移動範囲は、45°〜190°であり、ここで、0°は、アーム502の遠位端部506を処理ツールに直接向けることであり、例えば、アーム502は、実質的に水平である。
【0049】
把持器504は、アーム502の遠位端部506に回転可能に取付けられ、θ5軸を中心に回転する「肘」形継手を構成する。1つの実施形態では、θ5軸は、独立した軸ではなく、アーム502に直接関連して回転する把持器504を構成する。把持器504の回転は、例えば、アーム502の中を通って移動するベルト、チェーン又はバンドを介してアーム502の回転に直接リンクされるのがよい。把持器504はまた、アーム502を独立に回転させてもよい。いずれにせよ、θ5軸及びθ6軸を中心とする回転は、好ましくは、FOUP2内に格納されたウェーハが常に水平を維持することを保証するように調整される。
【0050】
作動時、アーム502は、好ましくは、コンベヤ160の上を移動するFOUP2がツール搭載装置500によって妨げられずに通ることを可能にするアイドリング位置等の任意の位置に静止する。FOUP2がツール搭載装置500の正面のコンベヤ160上で停止した後、アーム502を、下向きに回転させ、把持器504を、コンベヤ160上に着座したFOUP2の上部ハンドル6と接触させる(図11A参照)。この実施形態では、次に、把持器504は、FOUP2の上部ハンドル6を把持する。把持器504は、限定するわけではないが、FOUP2の側面ハンドル又は底面等のFOOUP2のその他の部分を把持することも本発明の範囲内である。ショルダ部503による垂直方向移動とアーム502の回転との組合せにより、ツール搭載装置500は、FOUP2をコンベヤ160から引離すようにそれを移動させ始める(図11B参照)。上述したように、この協働移動は、ウェーハの損傷を防止するために、好ましくは、FOUP内に配置されたウェーハを実質的に水平の向きに維持して、ウェーハの損傷を防止する。図11Cは、FOUP2を搭載ポート又は処理ツール棚の上に配置するツール搭載装置500を示している。ツール搭載装置500は、FOUP2をコンベヤ160とハウジング501の遠位端部518の上方の処理ツール10との間で移動させる。ツール搭載装置500はまた、FOUP2をRGV、AGV、PGV等のその他の輸送システムに搭載したりそれから取出したりするように構成されてもよい。
【0051】
ツール搭載装置500のハウジング501及びショルダ部503は、好ましくは、コンベヤ160と処理ツール10との間に配置される。この配置であれば、ツール搭載装置500は、x軸に沿って、即ち、コンベヤ160と平行に移動するように構成されるのがよい。x軸方向駆動機構(図12〜図13参照)は、限定するわけではないが、ラック及びピニオンシステム又はプラスチックタイヤ摩擦駆動装置等の当業技術で既知の任意の機構を有しているのがよい。
【0052】
図12〜図13は、x方向駆動アセンブリ550を示すと共に、x方向駆動アセンブリ550とコンベヤ160との間の関係を示している。x方向駆動アセンブリ550は、ハウジング552を有し、このハウジング552は、ツール搭載装置トラック554、様々なコンベヤ支持体及び/又は位置合わせ部556及び558を有している。ツール搭載装置500が、例えば単一の搭載ポートを使用するだけの固定装置である場合、この実施形態では、搭載ポートを通るコンベヤ160の部分は、コンベヤ支持ブラケット580によって支持される(図13C及び図13D参照)。コンベヤ支持ブラケット580は、コンベヤ160を設備の床から離すように上昇させている。ツール搭載装置500が複数の搭載ポートを使用する場合、x方向駆動アセンブリ550は、これらの搭載ポートの各々を通り過ぎるコンベヤ160の部分の下に配置される。x方向駆動アセンブリ550の長さは、変更してもよく、ツール搭載装置がx方向に移動しなければならない距離によって決定される。x方向駆動アセンブリ550のハウジング552は、コンベヤの部分を支持し、コンベヤ160のこの特定の部分をコンベヤ支持ブラケット580に置換する。
【0053】
x方向駆動アセンブリ550のハウジング552は、コンベヤ160をチャンネル556及び支持面558等の適所に保持する位置合わせ部を含んでいる。ハウジング552の特定の形態は、変更することができ、特定の種類のコンベヤ160に依存する。この実施形態では、コンベヤ160は、ハウジング552上に着座し、その結果、ツール搭載装置500のハウジング552及びx方向駆動アセンブリ550のハウジング501がコンベヤ160に隣接してスロット又はチャンネル554内をx方向に移動する。ツール搭載装置500のハウジング501は、x方向駆動アセンブリ550のハウジング552内に収容されたリードネジ等の駆動システムと連結される。限定するわけではないが、ベルト駆動又はラック及びピニオン歯車システム等の当該技術で既知のその他の機構も本発明の範囲内である。
【0054】
以上の説明の全ては、床ベースコンベヤについて説明したものである。しかしながら、コンベヤ160を、軌道搬送車(シャトル)に置換してもよいと考えられる。コンベヤと搭載ポートとの間のFOUP輸送のための上述した機構及び処理は、説明目的だけのものであり、本発明は、それによって限定されないことを認識すべきである。HOUP輸送のための方法及びシステムの好ましい実施形態を説明したが、当業者には、システムに一定の利点が達成されることが明らかなはずである。様々な修正例、適応例、及びその変形実施形態を、本発明の範囲及び精神の範囲内で実施することができることも認識すべきである。例えば、コンベヤの使用は、半導体製造設備内で示されたが、上述した本発明の概念の多くは、他の非半導体製造用途の使用に対して等しく適用可能であると考えられることは明らかである。
【図面の簡単な説明】
【0055】
【図1】本発明の実施形態の概略図である。
【図2】Y軸方向に移動する巻上げ機を示す本発明の別の実施形態の概略図である。
【図3】片持ち式の第2の巻上げ機構を有する巻上げ機を示す本発明の更に別の実施形態の概略図である。
【図4】移送アーム機構の実施形態を示す本発明の実施形態の斜視図である。
【図5】移送アーム機構の別の実施形態を示す本発明の実施形態の斜視図である。
【図6】移送アーム機構の更に別の実施形態を示す本発明の実施形態の斜視図である。
【図7】移送アーム機構の更に別の実施形態を示す本発明の実施形態の斜視図である。
【図8】追加の格納棚を備えた処理ツールを有する図5に示す実施形態の斜視図である。
【図9】処理ツールに隣接した追加の格納箇所を有する図5に示す実施形態の斜視図である。
【図10】実質的にコンベヤの上に配置された追加の格納棚を有する図5に示す実施形態の斜視図である。
【図11A】本発明の別の実施形態の斜視図である。
【図11B】本発明の別の実施形態の斜視図である。
【図11C】本発明の別の実施形態の斜視図である。
【図12A】x軸方向駆動アセンブリを示す本発明の別の実施形態の斜視図である。
【図12B】x軸方向駆動アセンブリを示す本発明の別の実施形態の斜視図である。
【図13A】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13B】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13C】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13D】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【図13E】x軸方向駆動アセンブリと容器輸送システムとの間の関係を示す、図12A及び図12Bに示す本発明の様々な図の1つである。
【特許請求の範囲】
【請求項1】
容器を容器移送システムと処理ツールの間で移送するための装置であって、
第1の端部及び第2の端部を有し、前記第1の端部と前記第2の端部の間を実質的に垂直方向に移動するように構成された駆動機構を実質的に包囲するハウジングと、
第1の幅を有する基部と、前記基部の第2の幅よりも小さい第2の幅を有する遠位端部とを有し、前記駆動機構に連結されたアーム支持体と、
前記アーム支持体の遠位端部に回転可能に連結された近位端部と、遠位端部とを有するアームと、
前記アームの遠位端部と回転可能に連結された把持器と、を有する装置。
【請求項2】
前記アームの近位端部は、前記アーム支持体の遠位端部と前記ハウジングの間に配置される、請求項1に記載の装置。
【請求項3】
前記アーム支持体の基部は、前記駆動機構と連結される、請求項1に記載の装置。
【請求項4】
前記駆動機構は、リードネジを有する、請求項1に記載の装置。
【請求項5】
前記把持器は、容器を前記容器の上部ハンドルのところで保持する、請求項1に記載の装置。
【請求項6】
前記容器移送システムは、前記処理ツールの前に配置され且つx方向を定める、請求項1に記載の装置。
【請求項7】
更に、前記ハウジングを実質的に前記x方向に沿って移動させるためのx方向駆動アセンブリを有する、請求項6に記載の装置。
【請求項8】
前記x方向駆動アセンブリは、前記ハウジングを前記容器移送システムと前記処理ツールの間でx方向に移動させる、請求項7に記載の装置。
【請求項9】
処理ツールを通る部分を有する容器輸送システムを含む設備における、容器を容器輸送システムと処理ツールの間で移動させるためのツール搭載装置であって、
駆動アセンブリを包囲する本体と、
前記本体に関して垂直方向に移動することができるように前記駆動アセンブリと連結されたショルダ部と、
前記ショルダ部に回転可能に連結された近位端と、遠位端とを有するアームと、
前記アームの前記遠位端に回転可能に連結された把持器と、
を含み、
前記本体及び前記ショルダ部は、処理ツールとそれを通る容器輸送システムの部分との間に配置される、装置。
【請求項10】
ウェーハ輸送システムであって、
搭載ポートを有する処理ツールと、
前記搭載ポートを通る部分を有する材料輸送システムと、
前記搭載ポートと前記材料輸送システムとの間に配置され、容器を前記搭載ポートと前記材料輸送システムの間で移送するためのツール搭載装置と、を有するウェーハ輸送システム。
【請求項11】
前記材料輸送システムは、コンベヤを有する、請求項10に記載のウェーハ輸送システム。
【請求項12】
前記コンベヤは、前記搭載ポートの搭載高さレベルよりも下に配置される、請求項11に記載のウェーハ輸送システム。
【請求項1】
容器を容器移送システムと処理ツールの間で移送するための装置であって、
第1の端部及び第2の端部を有し、前記第1の端部と前記第2の端部の間を実質的に垂直方向に移動するように構成された駆動機構を実質的に包囲するハウジングと、
第1の幅を有する基部と、前記基部の第2の幅よりも小さい第2の幅を有する遠位端部とを有し、前記駆動機構に連結されたアーム支持体と、
前記アーム支持体の遠位端部に回転可能に連結された近位端部と、遠位端部とを有するアームと、
前記アームの遠位端部と回転可能に連結された把持器と、を有する装置。
【請求項2】
前記アームの近位端部は、前記アーム支持体の遠位端部と前記ハウジングの間に配置される、請求項1に記載の装置。
【請求項3】
前記アーム支持体の基部は、前記駆動機構と連結される、請求項1に記載の装置。
【請求項4】
前記駆動機構は、リードネジを有する、請求項1に記載の装置。
【請求項5】
前記把持器は、容器を前記容器の上部ハンドルのところで保持する、請求項1に記載の装置。
【請求項6】
前記容器移送システムは、前記処理ツールの前に配置され且つx方向を定める、請求項1に記載の装置。
【請求項7】
更に、前記ハウジングを実質的に前記x方向に沿って移動させるためのx方向駆動アセンブリを有する、請求項6に記載の装置。
【請求項8】
前記x方向駆動アセンブリは、前記ハウジングを前記容器移送システムと前記処理ツールの間でx方向に移動させる、請求項7に記載の装置。
【請求項9】
処理ツールを通る部分を有する容器輸送システムを含む設備における、容器を容器輸送システムと処理ツールの間で移動させるためのツール搭載装置であって、
駆動アセンブリを包囲する本体と、
前記本体に関して垂直方向に移動することができるように前記駆動アセンブリと連結されたショルダ部と、
前記ショルダ部に回転可能に連結された近位端と、遠位端とを有するアームと、
前記アームの前記遠位端に回転可能に連結された把持器と、
を含み、
前記本体及び前記ショルダ部は、処理ツールとそれを通る容器輸送システムの部分との間に配置される、装置。
【請求項10】
ウェーハ輸送システムであって、
搭載ポートを有する処理ツールと、
前記搭載ポートを通る部分を有する材料輸送システムと、
前記搭載ポートと前記材料輸送システムとの間に配置され、容器を前記搭載ポートと前記材料輸送システムの間で移送するためのツール搭載装置と、を有するウェーハ輸送システム。
【請求項11】
前記材料輸送システムは、コンベヤを有する、請求項10に記載のウェーハ輸送システム。
【請求項12】
前記コンベヤは、前記搭載ポートの搭載高さレベルよりも下に配置される、請求項11に記載のウェーハ輸送システム。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】

【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【公表番号】特表2008−546180(P2008−546180A)
【公表日】平成20年12月18日(2008.12.18)
【国際特許分類】
【出願番号】特願2008−512464(P2008−512464)
【出願日】平成18年5月16日(2006.5.16)
【国際出願番号】PCT/US2006/019056
【国際公開番号】WO2006/124982
【国際公開日】平成18年11月23日(2006.11.23)
【出願人】(306029419)アシスト テクノロジーズ インコーポレイテッド (12)
【氏名又は名称原語表記】Asyst Technologies,Inc.
【住所又は居所原語表記】46897 Bayside Parkway,Fremont,California 94538,U.S.A.
【Fターム(参考)】
【公表日】平成20年12月18日(2008.12.18)
【国際特許分類】
【出願日】平成18年5月16日(2006.5.16)
【国際出願番号】PCT/US2006/019056
【国際公開番号】WO2006/124982
【国際公開日】平成18年11月23日(2006.11.23)
【出願人】(306029419)アシスト テクノロジーズ インコーポレイテッド (12)
【氏名又は名称原語表記】Asyst Technologies,Inc.
【住所又は居所原語表記】46897 Bayside Parkway,Fremont,California 94538,U.S.A.
【Fターム(参考)】
[ Back to top ]