
コンベヤ組立体
一列の均等に離間された物品を集積および荷下ろしするためのコンベヤ組立体が提供される。コンベヤ組立体は、受け取りコンベヤと、荷下ろしコンベヤと、ベルト誘導運び台とを含む。受け取りコンベヤおよび荷下ろしコンベヤはそれぞれ、受け取りベルトが当該システムの受け取り端部上のわずかにより高い隆起部にあり、荷下ろしベルトが荷下ろし端部上のわずかにより高い隆起部にある状態で組み合わされる複数の丸ベルトを含む。両方の組のベルトは、受け取りベルトが運び台の受け取り端部上でより高位にあり、かつ、荷下ろしベルトが運び台の荷下ろし端部上でより高位にあるように、受け取りベルトを上方隆起部から下方隆起部に誘導し、かつ荷下ろしベルトを下方隆起部から上方隆起部に誘導する可動運び台を通過する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はコンベヤシステムに関する。
【背景技術】
【0002】
製造工程内の機械が適切に動作するために、こうした機械はそれらにやって来る製品の一定かつ制御された速度を必要とする。これを成し遂げる最も容易な方法の1つは、何らかの種類の開閉機構の後ろにあるコンベヤ上に製品を集積することである。しかしながら、製品を物理的開閉部の後ろに保持することによって、コンベヤが製品の未処理分の下で摺動することが可能になり、各製品はその前の製品により多くの圧力を創出する。いくつかの製品はこの圧力に耐えることができず、あるいは、いくつかの柔らかいか粘着する製品の場合、製品の接触に対するいかなる製品にも耐えることができない。
【0003】
物理的開閉機構および関連する未処理分の圧力の問題を解決する以前の試みは、移動中継点により接続された受け取りコンベヤおよび荷下ろしコンベヤから成るシステムを用いる。受け取りコンベヤは荷下ろしコンベヤより速く動作する。従って、受け取りコンベヤ上の製品は、荷下ろしコンベヤ上の製品に追い付くことになる。移動中継点は荷下ろしコンベヤ上の最後の製品の後ろに直接位置し、前方に動く際にこの製品の後に続く。受け取りコンベヤ上の製品が荷下ろしコンベヤ上の最後の製品に追い付いている際にちょうど、移動中継点は後退してこの製品のために荷下ろしコンベヤ上に空間を創出し、新たな最後の製品の後に続き始める。このシステムの不利点は、移動中継に加え、受け取りコンベヤおよび荷下ろしコンベヤのための移動支持と、中継点が動く際にベルトを巻き取りかつ解放するシステムが必要とされることである。これは、移動中継が加速度を変化させる度に慣性荷重を加える。
【発明の概要】
【0004】
本発明に従うシステムおよび方法は、コンベヤのための移動支持の必要性と、ベルトを巻き取りかつ解放するシステムの必要性とを解消する。受け取りコンベヤおよび荷下ろしコンベヤはそれぞれ1つ以上の丸ベルトを含む。受け取りコンベヤおよび荷下ろしコンベヤは、重なり合いかつ組み合わされるように位置する。受け取りベルトは当該システムの受け取り端部上でわずかにより高い隆起部にあり、荷下ろしベルトは荷下ろし端部上でわずかにより高い隆起部にある。両方の組のベルトは可動運び台を通過する。この運び台は、受け取りベルトが運び台の受け取り端部上にある上方隆起部にあり、かつ、荷下ろしベルトが運び台の荷下ろし端部上にある上方隆起部にあるように、受け取りベルトを上方隆起部から下方隆起部に誘導し、かつ荷下ろしベルトを下方隆起部から上方隆起部に誘導する。物品が上方荷下ろしベルトにより輸送され、その一方で下方受け取りコンベヤ上を通過する地点における運び台にそうした物品が到達するまで、このシステムを通じて移動する物品は受け取りコンベヤにより運搬され、その一方で下方荷下ろしベルト上を通過する。
【0005】
受け取りコンベヤ上の物品がより遅い荷下ろしコンベヤ上の物品に追い付くように、受け取りコンベヤは荷下ろしコンベヤより大きい速度で動作する。センサは受け取りコンベヤ上の物品の位置を検出する。物品が運び台に接近する際に、運び台は荷下ろしコンベヤ上の最後の物品に対して後退し、荷下ろしコンベヤ上の新たな物品のために空間を創出する。その後、運び台は前方に動き、次の物品のために後退する時間まで、荷下ろしコンベヤ上の最後の物品の後に続く。従って、受け取りコンベヤ上に無作為に送り込まれる物品は、全く接触を伴わないか非常に軽い接触を伴って集積され、均一の速度および間隔で荷下ろしされる。
【0006】
受け取りコンベヤは、駆動ローラにより駆動される複数の丸ベルトを含む。受け取りコンベヤを、追加のローラおよび滑車の周辺に走らせることができる。荷下ろしコンベヤも駆動ローラにより駆動され、追加のローラおよび滑車の上方に走らせることもできる。運び台は、受け取りベルトおよび荷下ろしベルトの進行方向または回転方向に対して平行に動く。運び台は、2つの平行なタイミングベルトにより、または、玉ネジ等の他の適切な機構により駆動される。運び台は、受け取りベルトおよび荷下ろしベルトが通過する高部ベルトガイドおよび低部ベルトガイドを有する、少なくとも1つおよび好ましくは2つの棒を含む。受け取りベルトは、荷下ろしベルトより高い隆起部にある運び台の受け取り側面に入る。ベルトガイドは、運び台の荷下ろし側面から出ていく際に下方経路を辿っているように、受け取りコンベヤベルトを下げて1つの側面に移動させる。ベルトガイドは、運び台の荷下ろし端部から出ていく際に上方経路を辿るように、荷下ろしベルトを上げて1つの側面に移動させる。運び台は溝床上に乗っている。上方隆起部にあるコンベヤベルトは床により支持され、その一方で、下方隆起部にあるベルトは溝床の溝内にある。
【0007】
受け取りコンベヤおよび荷下ろしコンベヤならびに運び台は全て、独立した駆動部および符号器を有する。受け取りセンサは受け取りコンベヤ上の製品を検出し、このデータを制御装置に送信する。その後、制御装置はこの製品を運び台位置に移動する際に追跡し、製品が荷下ろしコンベヤ上に非常にほとんどまたは全く接触を伴わずに堆積するように、適切な時間に後退するように運び台に指示する。
【0008】
1つの例示的な実施形態によれば、本発明は、第1端部と、第2端部と、第1端部から第2端部に延在する上面と、上面を通る第1平行溝および第2平行溝とを有する溝床を有するコンベヤ組立体を対象とする。第1コンベヤベルトは、第1端部にある溝床の上面に沿っており、かつ第2端部にある溝床内の第2溝を通る。第2コンベヤベルトは第1端部にある溝床内の第1溝を通り、かつ第2端部にある溝床の上面に沿っている。コンベヤ組立体は、溝床の第1端部と第2端部との間に遷移領域を含む。第1コンベヤベルトは上面から第2溝を通過し、第2コンベヤベルトは第2溝から遷移領域の上面を通過する。
【0009】
1つの実施形態では、第1コンベヤベルトおよび第2コンベヤベルトはそれぞれ、溝に対して垂直な方向の遷移領域内に側方屈曲を有する。1つの実施形態では、第1コンベヤベルトは、第1端部で上面の上方に第1距離まで延在し、第2端部で上面の上方に第2距離まで延在する。第1距離は第2距離より大きい。第2コンベヤベルトは、第1端部で上面の上方に第2距離まで延在し、第2端部で上面の上方に第1距離まで延在する。1つの実施形態では、コンベヤ組立体は、溝床の上面の上方に延在し、かつ、遷移領域の位置を画定するように、溝床の第1端部または第2端部の何れかに向かって可動な運び台も含む。第1コンベヤベルトおよび第2コンベヤベルトは運び台を通過する。1つの実施形態では、運び台は、第1棒と、第1棒から離間された第2棒とも含む。第1棒および第2棒は溝に対して垂直に延在し、第1棒は溝床の第1端部と第2棒との間に配置される。1つの実施形態では、第1棒は、高部ベルトガイドと、低部ベルトガイドとを含む。第1棒の低部ベルトガイドは第1溝の上方に配置される。第2棒は、高部ベルトガイドと、低部ベルトガイドとを含む。第2棒の低部ベルトガイドは第2溝の上方に配置される。第1棒の高部ベルトガイドおよび第2棒の高部ベルトガイドは、第1溝および第2溝に対して平行な軸に沿って整列される。
【0010】
1つの実施形態では、第1コンベヤベルトは第1棒の高部ベルトガイドおよび第2棒の低部ベルトガイドを通り、第2コンベヤベルトは第1棒の低部ベルトガイドおよび第2棒の高部ベルトガイドを通る。1つの実施形態では、溝床は複数の平行溝を有し、コンベヤ組立体は、第1端部で溝床の上面に沿いかつ第2端部で溝床内の溝を通る複数の第1コンベヤベルトと、第1端部で溝床内の溝を通りかつ第2端部で溝床の上面に沿う複数の第2コンベヤベルトとも含む。遷移領域において、第1コンベヤベルトは上面から溝へ通過し、第2コンベヤベルトは溝から上面へ通過する。1つの実施形態では、コンベヤ組立体は溝床の上面の上方に延在する運び台を有する。運び台は、遷移領域の位置を画定するように、溝床の第1端部または第2端部の何れかに向かって可動である。運び台は、複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第1棒を含む。第1棒の低部ベルトガイドは複数の溝の上方に配置される。運び台は、第1棒に対して平行な、かつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第2棒も含む。第2棒の低部ベルトガイドは複数の溝の上方に配置される。第1棒の高部ベルトガイドおよび第2棒の高部ベルトガイドは、複数の溝に対して平行な軸に沿って整列され、かつ、複数の溝に対して垂直な軸に沿って下方ベルトガイドから側方に偏る。
【0011】
1つの実施形態では、第1コンベヤベルトは第1棒の高部ベルトガイドおよび第2棒の低部ベルトガイドを通り、第2コンベヤベルトは第1棒の低部ベルトガイドおよび第2棒の高部ベルトガイドを通る。
【0012】
本発明は、第1滑車および第2滑車の周辺を回転する複数の第1ベルトと、第3滑車および第4滑車の周辺を回転する複数の第2ベルトとを有するコンベヤ組立体も対象とする。第3滑車が第1滑車と第2滑車との間に配置され、かつ第2滑車が第3滑車と第4滑車との間に配置されるように、滑車は一列に配列される。コンベヤ組立体は、第1の複数のベルトおよび第2の複数のベルトにわたって垂直に延在する2つの棒を有する運び台を含む。これらの2つの棒は、第3滑車と第2棒との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第1棒と、第1棒と第2滑車との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第2棒とを含む。第1コンベヤベルトのそれぞれは、第1棒の高部ベルトガイドのうち1つおよび第2棒の低部ベルトガイドのうち1つを通り、第2コンベヤベルトのそれぞれは、第1棒の低部ベルトガイドのうち1つおよび第2棒の高部ベルトガイドのうち1つを通る。
【0013】
1つの実施形態では、第1コンベヤベルトの一つ一つおよび第2コンベヤベルトの一つ一つは、第1棒と第2棒との間にある遷移領域内に側方屈曲を有する。この側方屈曲は、第1コンベヤベルトおよび第2コンベヤベルトの回転方向に対して垂直な方向に延在する。1つの実施形態では、第1の複数のコンベヤベルトおよび第2の複数のコンベヤベルトの一つ一つが上面を有する。第1滑車と第1棒との間にある第1コンベヤベルトの上面と、第2棒と第4滑車との間にある第2コンベヤベルトの上面とは第1平面内に配置され、第2棒と第2滑車との間にある第1コンベヤベルトの上面と、第3滑車と第1棒との間にある第2コンベヤベルトの上面とは第2平面内に配置される。第1平面は第1平面から離間される。1つの実施形態では、第1コンベヤベルトおよび第2コンベヤベルトの厚さ未満の距離まで、第1平面は第2平面から離間される。
【0014】
1つの実施形態では、第1コンベヤベルトの上面は、第1棒から第2棒に移動する際に第1平面から第2平面に遷移し、第2コンベヤベルトの上面は、第1棒から第2棒に移動する際に第2平面から第1平面に遷移する。1つの実施形態では、コンベヤ組立体は、第3滑車と第2滑車との間で第1コンベヤベルトおよび第2コンベヤベルトに沿って第1棒および第2棒を移動させる、運び台と連動する駆動機構を含む。1つの実施形態では、駆動機構は、第1コンベヤベルトおよび第2コンベヤベルトの両側で運び台に取り付けられた2つのタイミングベルトを含む。
【0015】
本発明の例示的な実施形態は、コンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法も対象とする。本方法によれば、複数の平行な第1コンベヤベルトおよび複数の平行な第2コンベヤベルトが、例えば、滑車の周辺で回転される。第2コンベヤベルトは第1コンベヤベルトに対して平行であり、かつ所定の長さに沿って第1コンベヤベルトと分散配置されている。第1コンベヤベルトは、回転方向において所定の長さの範囲内で、所定の平面について第1高度から第2高度に遷移する。加えて、第2コンベヤベルトは、回転方向において所定の長さの範囲内で所定の平面について第3高度から第4高度に遷移する。1つの実施形態では、第3高度は第1高度より小さく、第2高度は第4高度より小さい。遷移領域は、分散配置された第1コンベヤベルトおよび第2コンベヤベルトの所定の長さの範囲内で画定され、そこで、第1コンベヤベルトおよび第2コンベヤベルトは、回転方向に対して垂直な方向で側方に偏移し、第1高度から第2高度へ、および第3高度から第4高度へそれぞれ遷移する。
【0016】
1つの実施形態では、遷移領域を画定することは、第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて第1コンベヤベルトを走らせることと、第1棒上の低部ベルトガイドおよび第2棒上の高部ベルトガイドを通じて第2コンベヤベルトを走らせることとをさらに含む。加えて、第1棒および第2棒は、遷移領域を移動させるように第1コンベヤベルトおよび第2コンベヤベルトに沿って移動される。1つの実施形態では、第1コンベヤベルトを遷移させることは、溝床の上面から溝床内の複数の平行溝のうち1つに各第1コンベヤベルトを移動させることを含む。加えて、第2コンベヤベルトを遷移させることは、平行溝のうち1つから上面に各第2コンベヤベルトを移動させることを含む。
【図面の簡単な説明】
【0017】
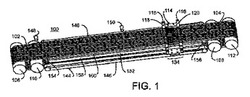
【図1】本発明に従うコンベヤ組立体の一実施形態の斜視図である。
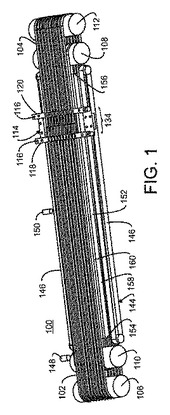
【図2】コンベヤ組立体の上面図である。
【図3】コンベヤ組立体の側面図である。
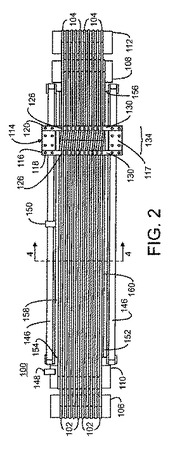
【図4】図2の線4‐4を通じる図である。
【図5】本発明の溝床および運び台の断面の図である。
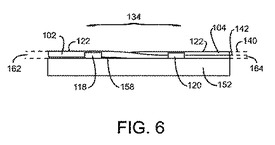
【図6】遷移領域内におけるコンベヤ組立体の部分断面の側面図である。
【図7】本発明に従う運び台の棒のガイドおよび溝床の一実施形態の実例である。
【発明を実施するための形態】
【0018】
初めに図1〜図3を参照すると、本発明の例示的実施形態はコンベヤ組立体100を対象としている。コンベヤ組立体は、製造設備内での工程または作業の合間に、製造製品、例えば、焼き物または焼き菓子を移動させる。工程または作業の合間に移動する製品に加え、コンベヤ組立体は2つの作業間における任意の速度差を補正し、当該システム内で緩衝器または集積器として機能する。コンベヤ組立体は、受け取りベルトと呼ばれる少なくとも1つの第1コンベヤベルト102と、荷下ろしベルトと呼ばれる少なくとも1つの第2コンベヤベルト104とを含む。本発明はちょうど2つのベルト、単一の第1コンベヤベルトおよび単一の第2コンベヤベルトを利用することができるが、好ましくは、コンベヤ組立体は、複数の第1コンベヤベルト102および複数の第2コンベヤベルト104を含む。コンベヤベルトにとって適切な種類および素材は、当該技術分野で知られかつ利用可能である。コンベヤベルトは、正方形または円形の横断面を有する場合がある。1つの実施形態では、各コンベヤベルトは鎖である。好ましくは、コンベヤベルトはゴム系化合物から構築され、かつ紐等の補強材を含む。
【0019】
複数の第1コンベヤベルト102は、少なくとも2つの滑車、第1滑車106および第2滑車108の周辺を回転する。複数の第2コンベヤベルト104も、少なくとも2つの滑車、第3滑車110および第4滑車112の周辺を回転する。第3滑車110が第1滑車106と第2滑車108との間に配置され、かつ第2滑車108が第3滑車110と第4滑車112との間に配置されるように、滑車は一列に配列される。1つの実施形態では、第1滑車および第4滑車が実質的に共平面であり、第3滑車および第2滑車が実質的に共平面である。滑車にとって適切な素材は、当該技術分野で知られかつ利用可能である。1つの実施形態では、各組の滑車における滑車のうち少なくとも1つは電源(図示せず)に取り付けられ、当業者には恐らく明らかなように、そうした滑車に取り付けられた滑車およびベルトを回転させる。追加の滑車を含めることができる可能性があるが、好ましくは、配列を簡素かつ小型にし、かつ既存の製造工程に容易に挿入または追加導入されるように、コンベヤ組立体はちょうど4つの滑車を含む。
【0020】
1つの実施形態では、複数の第1コンベヤベルトは平行であり、複数の第2コンベヤベルトも互いにかつ第1コンベヤベルトに対して平行である。第1コンベヤベルトおよび第2コンベヤベルトは所定の長さに沿って分散配置されることが好ましく、具体的には、第1コンベヤベルト、第2コンベヤベルト、第1コンベヤベルトなどの交互の様式で配列される。第1コンベヤベルトおよび第2コンベヤベルトは同じ方向に回転するが、第1コンベヤベルトおよび第2コンベヤベルトは異なる速度で回転することが好ましい。1つの実施形態では、第2コンベヤベルトは第1コンベヤベルトより遅い速度で回転する。
【0021】
第1コンベヤベルトおよび第2コンベヤベルトは、第3滑車110と第2滑車108との間に概して画定される領域内で分散配置されている。図4で最良に例解されているように、コンベヤベルトが重なり合うか分散配置されている領域内において、第1コンベヤベルト102および第2コンベヤベルト104の相対高度に差異が存在する。コンベヤ組立体100に沿って運ばれる製品124は、第1コンベヤベルトおよび第2コンベヤベルトの両方の上面122(図3)にのみ接する。従って、図4中における第1組のコンベヤベルトでのように、一方の組のベルトが他方の組のベルトより高い場合、製品124は第1コンベヤベルト102の上面122と接触するのみである。製品124は、従って、第1コンベヤベルトが動いている任意の速度で第1コンベヤベルト102により運搬され、第2コンベヤベルト104は製品124と接触することなく製品の下に沿って動く。2つの組のコンベヤベルトの間で製品を取り換えることは、第1コンベヤベルトおよび第2コンベヤベルトの相対高度を変更することにより達成される。
【0022】
本発明に従うコンベヤ組立体100の例示的な実施形態は、第1コンベヤベルト102と第2コンベヤベルト104との相対高度の変化を与える機構を含む。相対高度のこうした変化は、第1コンベヤベルトと第2コンベヤベルトとの間にあるコンベヤ組立体上を動く製品を遷移させる。1つの実施形態では、コンベヤ組立体は、第1および第2の複数のベルトにわたって垂直に延在する2つの棒116を含む運び台114を含む。これらの2つの棒は第1棒118および第2棒120を含む。第1棒118は第3滑車110と第2棒120との間に配置され、第2棒は第1棒118と第2滑車108との間に配置される。棒にとって適切な素材としては、プラスチック類、セラミック類、およびステンレス鋼等の金属類が挙げられる。1つの実施形態では、棒は約4インチから約6インチまで離間される。
【0023】
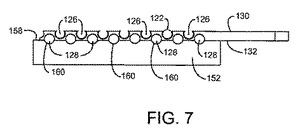
図7を参照すると、各棒は、複数の高部ベルトガイド126および複数の低部ベルトガイド128を含む。従って、第1棒118は、複数の第1棒の低部ベルトガイドおよび複数の第1棒の高部ベルトガイドを含み、第2棒は、複数の第2棒の低部ベルトガイドおよび複数の第2棒の高部ベルトガイドを含む。各ベルトガイドはコンベヤベルトの形状に対応する横断面形状を有し、固着することなくコンベヤベルトがガイドを通過することを可能にするのに十分に大きい大きさにされる。例解されているように、各ベルトガイドは概して円形の横断面を有する。各ガイドは、コンベヤベルトのガイドを通じる通過を容易にするために、Teflon(登録商標)の裏地および傾斜または面取りした縁等の潤滑材も含む場合がある。高部ベルトガイドは各コンベヤベルトの外周の周辺に延在する。好ましくは、高部ベルトガイドはコンベヤベルトの外周の半分より多くの周辺に延在し、従って、高部ベルトガイドはコンベヤベルトを適所に保持し、コンベヤベルトがガイドの外に浮き上がることを防ぐ。各ベルトの上面122は高部ベルトガイドの外に延在し、棒の上側面130の上方にある。1つの実施形態では、低部ベルトガイドは各コンベヤベルトの周辺にある外周の半分に延在する。好ましくは、各コンベヤベルトが各棒の下側面132を越えて延在するように、低部ベルトガイドは各コンベヤベルトの外周の半分より多くの周辺に延在する。
【0024】
2つの棒上にある運び台および特にベルトガイドは、コンベヤシステムに沿って第1コンベヤベルトから第2コンベヤベルトへ動かされる製品を遷移させるように、第1コンベヤベルトおよび第2コンベヤベルトの相対高度を変更するために用いられる。1つの実施形態では、第1コンベヤベルトの一つ一つは、第1棒の高部ベルトガイドのうち1つおよび第2棒の低部ベルトガイドのうち1つを通る。第2コンベヤベルトの一つ一つは、第1棒の低部ベルトガイドのうち1つおよび第2棒の高部ベルトガイドのうち1つを通る。従って、第1コンベヤベルトおよび第2コンベヤベルトの回転方向にある第1棒から第2棒に移動する際に、第1コンベヤベルトは比較的高い位置から比較的低い位置に遷移する。反対に、第1棒から第2棒に移動する際に、第2コンベヤベルトは比較的低い位置から比較的高い位置に遷移する。従って、運び台114はコンベヤ組立体100の遷移領域134内に配置され、かつこれを画定する。これは、約4インチから約6インチの長さを有する遷移領域を創出する。
【0025】
図5および図6を参照すると、1つの実施形態では、第1コンベヤベルト102の一つ一つおよび第2コンベヤベルト104の一つ一つは、第1棒と第2棒との間にある遷移領域134内に側方屈曲136を含む。側方屈曲136は、矢印Aにより示されているような第1コンベヤベルトおよび第2コンベヤベルトの回転方向に対して、垂直な方向に延在する。側方屈曲は、単一の第1コンベヤベルト102および単一の第2コンベヤベルト104に関して図5で例解されているが、側方屈曲は複数の第1コンベヤベルトおよび第2コンベヤベルトの全てに関して同じである。第1棒の高部ベルトガイド126および第2棒の高部ベルトガイド126は平行軸138に沿って整列され、かつ、コンベヤベルトの回転方向に対して垂直な軸に沿って下方ベルトガイドから側方に偏る。下方ベルトガイドも平行軸に沿って整列される。従って、所定のコンベヤベルトは、高部ベルトガイドから低部ベルトガイドに移動する際に、または低部ベルトガイドから後部ベルトガイドに移動する際に、偏った平行軸の間で側方に偏移する。全ての第1コンベヤベルトおよび第2コンベヤベルトは側方に偏移しかつ高部ベルトガイドと低部ベルトガイドとの間を移動し、それ故、重なり合うか交わることなく高相対位置および低相対位置が生じる。ベルトは偏移の領域内で平行のままである。
【0026】
図3および図6で例解されているように、第1コンベヤベルトおよび第2コンベヤベルトの上面122は、2つの異なる高度にある2つの平面の間で遷移する。第1コンベヤベルトおよび第2コンベヤベルトの一つ一つは、コンベヤ組立体100に沿って進行する製品と接触する上面122を含む。第1滑車106と第1棒118との間にある第1コンベヤベルトの上面122と、第2棒120と第4滑車112との間にある第2コンベヤベルトの上面122とは、第1平面140内に配置される。第2棒120と第2滑車108との間にある第1コンベヤベルトの上面122と、第3滑車110と第1棒118との間にある第2コンベヤベルトの上面122とは、第2平面142内に配置される。第1平面140は第2平面142から離間される。好ましくは、第1コンベヤベルトおよび第2コンベヤベルトの厚さ未満の距離まで、第1平面140は第2平面142から離間される。第1コンベヤベルトの上面122は、第1棒118から第2棒120に移動する際に第1平面140から第2平面142に遷移し、第2コンベヤベルトの上面122は、第1棒118から第2棒120に移動する際に第2平面142から第1平面140に遷移する。コンベヤ組立体により運ばれる製品は、第1平面140内に位置する上面122と接触する。
【0027】
遷移領域は、第1コンベヤベルトと第2コンベヤベルトとの間における製品の遷移を画定する。第2コンベヤベルトへ移される前に、第1コンベヤベルト上に集積する製品数の増加または減少に順応するように、この遷移領域を移動させることができる。遷移領域134の移動は、第3滑車110と第2滑車108との間で運び台114を動かすことにより達成される。1つの実施形態では、コンベヤ組立体100は、第3滑車110と第2滑車108との間で第1コンベヤベルトおよび第2コンベヤベルトに沿って第1棒および第2棒を移動させる、運び台114と連動する駆動機構144を含む。適切な駆動機構は、第1コンベヤベルトおよび第2コンベヤベルトの両側で運び台114に取り付けられた2つのタイミングベルト146を含む。タイミングベルトの回転がコンベヤベルトの長さに沿って運び台を動かすように、運び台は各タイミングベルトに固定して取り付けられる。1つの実施形態では、タイミングベルトは運び台に締めネジで固定される締め具により運び台に取り付けられる。締め具は、タイミングベルトの歯を整合させる溝を有する底板115(図3)と、底板に締めネジで固定する上板117(図2)とを含む。タイミングベルトは上板と底板との間に締め具で固定される。タイミングベルト、タイミングベルトの鎖歯車、溝を有する底板、および上板は、当該技術分野で知られかつ市販されている。1つの実施形態では、運び台はコンベヤベルトの両側に底板および上板を含み、棒は上板に締めネジで固定されかつそれらの間に延在する。
【0028】
タイミングベルトは、第1コンベヤベルトおよび第2コンベヤベルトに対して平行に走る。運び台114の運動および位置を制御するために、制御電子機器およびセンサが設けられる。1つの実施形態では、第1センサ148は第3滑車110に隣接して配置され、第2センサ150は第3滑車110と第2滑車108との間に設けられる。適切なセンサとしては、センサの位置におけるコンベヤベルト上の製品の存在または不在を検出することができる光学センサ、例えば赤外線センサが挙げられる。センサは、製品が第3滑車と第2滑車との間にある領域に入る時間と、センサ間を移動している製品の速度と、製品がコンベヤベルト上に集積しているかどうかと、ならびに製品の集積量とについての情報を提供する。センサから得られる情報を前提として、運び台はコンベヤベルトに沿って適切な方向に動かされる。適切な制御電子機器およびセンサは、当該技術分野で知られかつ利用可能である。1つの実施形態では、コンベヤシステムはプログラム可能論理制御装置(PLC)またはコンピュータにより制御される。受け取りコンベヤおよび運び台の駆動システムは符号器を装備している。受け取り光電セル148が新たな製品を検出する時、受け取りコンベアの符号器の読み込みデータは先入れ先出しスタック(FIFO)に入れられる。制御装置は、符号器のデータを用いて、当該技術分野で知られているように受け取りコンベヤの速度を計算する。制御装置は符号器の読み込みデータをFIFOから取り出し、当該技術分野で知られているようにこの製品(運び台に到達する次の製品)の位置を計算する。この製品の速度および位置から、制御装置は運び台が戻って製品のために空間を創出する時間および速度を計算する。製品が荷下ろしコンベア上にあった後に、制御装置はFIFOからの次の符号器の読み取りデータで当該工程を繰り返すことになる。
【0029】
1つの実施形態では、コンベヤ組立体は、第3滑車110と第2滑車108との間において、コンベヤベルトの下、またはコンベヤベルトの回転する輪の内側に延在する固定された溝床152も含む。溝床152にとって適切な素材としては、プラスチック類、セラミック類、およびステンレス鋼等の金属類が挙げられる。溝床152は、第1コンベヤベルトおよび第2コンベヤベルトの相対高度の遷移を容易にするように、運び台と連動して動作する。溝床は、コンベヤ組立体内のコンベヤベルトのための支持の全てを移動および供給しないことが好ましい。従って、コンベヤ組立体の全体の深さは、コンベヤベルトを有する第1滑車から第4滑車までの大きさにより画定される。溝床152は、第1端部154と、第1端部と反対側の第2端部156と、第1端部154から第2端部156に延在する上面158とを含む。1つの実施形態では、溝床は少なくとも2つの平行溝160、例えば、上面158を通る第1平行溝および第2平行溝を含む。好ましくは、溝床152は、第1端部と第2端部との間にある溝床を通る、複数の平行溝160を含む。平行溝160は、図5で例解されているように、上面158を複数の溝間平行部分に分割する。1つの実施形態では、平行溝160は第1コンベヤベルトおよび第2コンベヤベルトに対して平行に配列される。平行溝は、コンベヤベルトの形状に対して相補的である横断面形状を有する。代替的には、平行溝は、ベルト、例えば、正方形の溝または溝穴である溝における丸ベルトの横断面形状以外に成形される。
【0030】
図7で例解されているように、1つの実施形態では、複数の平行溝の一つ一つは、円形のコンベヤベルトを相補する半円形の横断面形状を有する。好ましくは、半円形の形状は、コンベヤベルトが溝の中および外へ自由に動くことができるように、コンベヤベルトの外周の半分以下である。図7は、溝床の上面158に沿って動く高部コンベヤベルトが、運び台114の領域内にある溝床の上面158の上に拾い上げられるか持ち上げられることを例解している。これは、運び台の領域内にある第1平面140のわずかに上に上方コンベヤベルトの上面を上昇させる。コンベヤベルトは、運び台の各棒における高部ベルトガイドの下にある棒の素材の量に対応して、約1/16インチのみ持ち上げられる。この素材および高部ベルトガイドの離間により、高部ベルトガイドおよび低部ベルトガイドが棒の長さに沿って重なり合う際に、誘導棒132を半分に切断する必要なく、単一の棒に高部ベルトガイドと低部ベルトガイドを配置することが容易になる。
【0031】
1つの実施形態では、第1コンベヤベルト102は、第1端部154で溝床152の上面158に沿い、第2端部156で溝床152内における複数の溝160を通る。第2コンベヤベルト104は、第1端部154で溝床152内における複数の溝160を通り、第2端部156で溝床152の上面158に沿う。第1コンベヤベルト102は、運び台114により画定された遷移領域134内で上面158から溝160を通過し、第2コンベヤベルト104は、当該遷移領域で溝160から上面158を通過する。運び台の第1棒と第2棒との間にある遷移領域内の第1コンベヤベルトおよび第2コンベヤベルトにおける側方屈曲136は、複数の溝に対して垂直な方向にある。従って、遷移領域内の各コンベヤベルトは、溝床の溝と上面との間で側方に偏移する。
【0032】
図6を参照すると、第1コンベヤベルト102は、第1端部から第1棒までにおいて上面158の上方に第1距離162まで、および、第2棒120から第2端部までにおいて上面158の上方に第2距離164まで延在している。第1距離162は第2距離164より大きい。第2コンベヤベルト104は、第1端部154から第1棒118までにおいて上面158の上方に第2距離164まで、および、第2棒120から第2端部156までにおいて上面158の上方に第1距離162まで延在している。運び台114は溝床の上面の上方に延在し、かつ、遷移領域の位置を画定する溝床の第1端部または第2端部の何れかに向かって可動である。以上で検討されたように、第1コンベヤベルトおよび第2コンベヤベルトは運び台を通過する。
【0033】
図2および図5で例解されているように、運び台の第1棒および第2棒は溝に対して垂直に延在している。第1棒118は、溝床の第1端部と第2棒120との間に配置される。第1棒および第2棒の高部ベルトガイドは、第1溝160および第2溝160に対して平行な軸138に沿って整列されるが、溝床152の上面158部分の上方に配置される。低部ベルトガイドは溝床内の溝160と整列され、かつ当該溝の上方に配置される。第1コンベヤベルト102は、遷移領域134を通じて動く際に、第1棒118内の高部ベルトガイド126から第2棒120内の低部ベルトガイド128に動き、そして低部ベルトガイドがその上方に位置する溝160の中へ動く。第2コンベヤベルト104は、遷移領域134を通じて動く際に、第1棒118内の低部ベルトガイド128から第1棒の低部ベルトガイドと整列される溝160の外に動き、そして第2棒120内の高部ベルトガイド126の中へ動く。これは、第1コンベヤベルトと第2コンベヤベルトとの間の相対高度を変化させ、かつ、第1コンベヤベルトから第2コンベヤベルトへの製品の交換を提供する。
【0034】
本発明の例示的な実施形態は、本発明のコンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法も対象とする。複数の平行な第1コンベヤベルトおよび複数の平行な第2コンベヤベルトは、対応する対の鎖歯車、駆動輪または滑車の周辺で回転される。第2コンベヤベルトは第1コンベヤベルトに対して平行であり、かつ、所定の長さに沿って第1コンベヤベルトと分散配置される。第1コンベヤベルトは、第2コンベヤベルトとの重複部分のその所定の長さの範囲内における回転方向にある所定の平面に関して、第1高度から第2高度に遷移される。加えて、第2コンベヤベルトは、当該所定の長さの範囲内における回転方向にある所定の平面に関して、第3高度から第4高度に遷移される。第3高度は第1高度より小さく、第2高度は第4高度より小さい。好ましくは、以上で検討されているように、第3高度および第2高度は同等であり、第1高度および第4高度は同等である。コンベヤベルト間に高度の相対変化を創出するように、その周辺でコンベヤベルトが回転する滑車を位置付けることができる。遷移領域は、分散配置された第1コンベヤベルトおよび第2コンベヤベルトの所定の長さの範囲内で画定される。この遷移領域内では、第1コンベヤベルトおよび第2コンベヤベルトは、それらの回転方向に対して垂直な方向で側方に偏移し、第1高度から第2高度へ、および第3高度から第4高度へそれぞれ遷移する。
【0035】
1つの実施形態では、遷移領域を画定するために、第1コンベヤベルトは第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて走らされ、第2コンベヤベルトは第1棒上の低部ベルトガイドおよび第2棒上の高部ベルトガイドを通じて走らされる。これは、第1コンベヤベルトと第2コンベヤベルトとの間の相対高度を遷移させる。1つの実施形態では、互いに対して固定されるこれらの棒は、第1コンベヤベルトおよび第2コンベヤベルトに沿って動かされ、遷移領域を移動させる。1つの実施形態では、溝床は遷移領域内で用いられ、各第1コンベヤベルトは、溝床の上面から溝床内における複数の平行溝のうち1つに動かされる。加えて、各第2コンベヤベルトは平行溝のうち1つから上面に動かされる。1つの実施形態では、第1棒および第2棒は、溝床の溝と上面との間におけるコンベヤベルトの移動を支援するために用いられる。この溝床は第1コンベヤベルトおよび第2コンベヤベルトの下に位置し、かつ遷移領域全体にわたってコンベヤベルトのための支持を提供する。
【0036】
本明細書で開示されている発明の例解的な実施形態が本発明の目的を満たすことは明白であるものの、当業者が多数の修正および他の実施形態を考案することができることを十分に理解されたい。加えて、任意の実施形態からの1つまたは複数の特徴および/または1つまたは複数の要素を、単独に、または他の1つまたは複数の実施形態と組み合わせて用いることができ、本発明に従う方法からのステップまたは要素を、任意の適切な順序で実行または実施することができる。従って、添付の特許請求の範囲は全てのこのような修正および実施形態を含めることを目的とし、それらは本発明の趣旨および範囲の中に入ることになる可能性があることを理解されたい。
【技術分野】
【0001】
本発明はコンベヤシステムに関する。
【背景技術】
【0002】
製造工程内の機械が適切に動作するために、こうした機械はそれらにやって来る製品の一定かつ制御された速度を必要とする。これを成し遂げる最も容易な方法の1つは、何らかの種類の開閉機構の後ろにあるコンベヤ上に製品を集積することである。しかしながら、製品を物理的開閉部の後ろに保持することによって、コンベヤが製品の未処理分の下で摺動することが可能になり、各製品はその前の製品により多くの圧力を創出する。いくつかの製品はこの圧力に耐えることができず、あるいは、いくつかの柔らかいか粘着する製品の場合、製品の接触に対するいかなる製品にも耐えることができない。
【0003】
物理的開閉機構および関連する未処理分の圧力の問題を解決する以前の試みは、移動中継点により接続された受け取りコンベヤおよび荷下ろしコンベヤから成るシステムを用いる。受け取りコンベヤは荷下ろしコンベヤより速く動作する。従って、受け取りコンベヤ上の製品は、荷下ろしコンベヤ上の製品に追い付くことになる。移動中継点は荷下ろしコンベヤ上の最後の製品の後ろに直接位置し、前方に動く際にこの製品の後に続く。受け取りコンベヤ上の製品が荷下ろしコンベヤ上の最後の製品に追い付いている際にちょうど、移動中継点は後退してこの製品のために荷下ろしコンベヤ上に空間を創出し、新たな最後の製品の後に続き始める。このシステムの不利点は、移動中継に加え、受け取りコンベヤおよび荷下ろしコンベヤのための移動支持と、中継点が動く際にベルトを巻き取りかつ解放するシステムが必要とされることである。これは、移動中継が加速度を変化させる度に慣性荷重を加える。
【発明の概要】
【0004】
本発明に従うシステムおよび方法は、コンベヤのための移動支持の必要性と、ベルトを巻き取りかつ解放するシステムの必要性とを解消する。受け取りコンベヤおよび荷下ろしコンベヤはそれぞれ1つ以上の丸ベルトを含む。受け取りコンベヤおよび荷下ろしコンベヤは、重なり合いかつ組み合わされるように位置する。受け取りベルトは当該システムの受け取り端部上でわずかにより高い隆起部にあり、荷下ろしベルトは荷下ろし端部上でわずかにより高い隆起部にある。両方の組のベルトは可動運び台を通過する。この運び台は、受け取りベルトが運び台の受け取り端部上にある上方隆起部にあり、かつ、荷下ろしベルトが運び台の荷下ろし端部上にある上方隆起部にあるように、受け取りベルトを上方隆起部から下方隆起部に誘導し、かつ荷下ろしベルトを下方隆起部から上方隆起部に誘導する。物品が上方荷下ろしベルトにより輸送され、その一方で下方受け取りコンベヤ上を通過する地点における運び台にそうした物品が到達するまで、このシステムを通じて移動する物品は受け取りコンベヤにより運搬され、その一方で下方荷下ろしベルト上を通過する。
【0005】
受け取りコンベヤ上の物品がより遅い荷下ろしコンベヤ上の物品に追い付くように、受け取りコンベヤは荷下ろしコンベヤより大きい速度で動作する。センサは受け取りコンベヤ上の物品の位置を検出する。物品が運び台に接近する際に、運び台は荷下ろしコンベヤ上の最後の物品に対して後退し、荷下ろしコンベヤ上の新たな物品のために空間を創出する。その後、運び台は前方に動き、次の物品のために後退する時間まで、荷下ろしコンベヤ上の最後の物品の後に続く。従って、受け取りコンベヤ上に無作為に送り込まれる物品は、全く接触を伴わないか非常に軽い接触を伴って集積され、均一の速度および間隔で荷下ろしされる。
【0006】
受け取りコンベヤは、駆動ローラにより駆動される複数の丸ベルトを含む。受け取りコンベヤを、追加のローラおよび滑車の周辺に走らせることができる。荷下ろしコンベヤも駆動ローラにより駆動され、追加のローラおよび滑車の上方に走らせることもできる。運び台は、受け取りベルトおよび荷下ろしベルトの進行方向または回転方向に対して平行に動く。運び台は、2つの平行なタイミングベルトにより、または、玉ネジ等の他の適切な機構により駆動される。運び台は、受け取りベルトおよび荷下ろしベルトが通過する高部ベルトガイドおよび低部ベルトガイドを有する、少なくとも1つおよび好ましくは2つの棒を含む。受け取りベルトは、荷下ろしベルトより高い隆起部にある運び台の受け取り側面に入る。ベルトガイドは、運び台の荷下ろし側面から出ていく際に下方経路を辿っているように、受け取りコンベヤベルトを下げて1つの側面に移動させる。ベルトガイドは、運び台の荷下ろし端部から出ていく際に上方経路を辿るように、荷下ろしベルトを上げて1つの側面に移動させる。運び台は溝床上に乗っている。上方隆起部にあるコンベヤベルトは床により支持され、その一方で、下方隆起部にあるベルトは溝床の溝内にある。
【0007】
受け取りコンベヤおよび荷下ろしコンベヤならびに運び台は全て、独立した駆動部および符号器を有する。受け取りセンサは受け取りコンベヤ上の製品を検出し、このデータを制御装置に送信する。その後、制御装置はこの製品を運び台位置に移動する際に追跡し、製品が荷下ろしコンベヤ上に非常にほとんどまたは全く接触を伴わずに堆積するように、適切な時間に後退するように運び台に指示する。
【0008】
1つの例示的な実施形態によれば、本発明は、第1端部と、第2端部と、第1端部から第2端部に延在する上面と、上面を通る第1平行溝および第2平行溝とを有する溝床を有するコンベヤ組立体を対象とする。第1コンベヤベルトは、第1端部にある溝床の上面に沿っており、かつ第2端部にある溝床内の第2溝を通る。第2コンベヤベルトは第1端部にある溝床内の第1溝を通り、かつ第2端部にある溝床の上面に沿っている。コンベヤ組立体は、溝床の第1端部と第2端部との間に遷移領域を含む。第1コンベヤベルトは上面から第2溝を通過し、第2コンベヤベルトは第2溝から遷移領域の上面を通過する。
【0009】
1つの実施形態では、第1コンベヤベルトおよび第2コンベヤベルトはそれぞれ、溝に対して垂直な方向の遷移領域内に側方屈曲を有する。1つの実施形態では、第1コンベヤベルトは、第1端部で上面の上方に第1距離まで延在し、第2端部で上面の上方に第2距離まで延在する。第1距離は第2距離より大きい。第2コンベヤベルトは、第1端部で上面の上方に第2距離まで延在し、第2端部で上面の上方に第1距離まで延在する。1つの実施形態では、コンベヤ組立体は、溝床の上面の上方に延在し、かつ、遷移領域の位置を画定するように、溝床の第1端部または第2端部の何れかに向かって可動な運び台も含む。第1コンベヤベルトおよび第2コンベヤベルトは運び台を通過する。1つの実施形態では、運び台は、第1棒と、第1棒から離間された第2棒とも含む。第1棒および第2棒は溝に対して垂直に延在し、第1棒は溝床の第1端部と第2棒との間に配置される。1つの実施形態では、第1棒は、高部ベルトガイドと、低部ベルトガイドとを含む。第1棒の低部ベルトガイドは第1溝の上方に配置される。第2棒は、高部ベルトガイドと、低部ベルトガイドとを含む。第2棒の低部ベルトガイドは第2溝の上方に配置される。第1棒の高部ベルトガイドおよび第2棒の高部ベルトガイドは、第1溝および第2溝に対して平行な軸に沿って整列される。
【0010】
1つの実施形態では、第1コンベヤベルトは第1棒の高部ベルトガイドおよび第2棒の低部ベルトガイドを通り、第2コンベヤベルトは第1棒の低部ベルトガイドおよび第2棒の高部ベルトガイドを通る。1つの実施形態では、溝床は複数の平行溝を有し、コンベヤ組立体は、第1端部で溝床の上面に沿いかつ第2端部で溝床内の溝を通る複数の第1コンベヤベルトと、第1端部で溝床内の溝を通りかつ第2端部で溝床の上面に沿う複数の第2コンベヤベルトとも含む。遷移領域において、第1コンベヤベルトは上面から溝へ通過し、第2コンベヤベルトは溝から上面へ通過する。1つの実施形態では、コンベヤ組立体は溝床の上面の上方に延在する運び台を有する。運び台は、遷移領域の位置を画定するように、溝床の第1端部または第2端部の何れかに向かって可動である。運び台は、複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第1棒を含む。第1棒の低部ベルトガイドは複数の溝の上方に配置される。運び台は、第1棒に対して平行な、かつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第2棒も含む。第2棒の低部ベルトガイドは複数の溝の上方に配置される。第1棒の高部ベルトガイドおよび第2棒の高部ベルトガイドは、複数の溝に対して平行な軸に沿って整列され、かつ、複数の溝に対して垂直な軸に沿って下方ベルトガイドから側方に偏る。
【0011】
1つの実施形態では、第1コンベヤベルトは第1棒の高部ベルトガイドおよび第2棒の低部ベルトガイドを通り、第2コンベヤベルトは第1棒の低部ベルトガイドおよび第2棒の高部ベルトガイドを通る。
【0012】
本発明は、第1滑車および第2滑車の周辺を回転する複数の第1ベルトと、第3滑車および第4滑車の周辺を回転する複数の第2ベルトとを有するコンベヤ組立体も対象とする。第3滑車が第1滑車と第2滑車との間に配置され、かつ第2滑車が第3滑車と第4滑車との間に配置されるように、滑車は一列に配列される。コンベヤ組立体は、第1の複数のベルトおよび第2の複数のベルトにわたって垂直に延在する2つの棒を有する運び台を含む。これらの2つの棒は、第3滑車と第2棒との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第1棒と、第1棒と第2滑車との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを有する第2棒とを含む。第1コンベヤベルトのそれぞれは、第1棒の高部ベルトガイドのうち1つおよび第2棒の低部ベルトガイドのうち1つを通り、第2コンベヤベルトのそれぞれは、第1棒の低部ベルトガイドのうち1つおよび第2棒の高部ベルトガイドのうち1つを通る。
【0013】
1つの実施形態では、第1コンベヤベルトの一つ一つおよび第2コンベヤベルトの一つ一つは、第1棒と第2棒との間にある遷移領域内に側方屈曲を有する。この側方屈曲は、第1コンベヤベルトおよび第2コンベヤベルトの回転方向に対して垂直な方向に延在する。1つの実施形態では、第1の複数のコンベヤベルトおよび第2の複数のコンベヤベルトの一つ一つが上面を有する。第1滑車と第1棒との間にある第1コンベヤベルトの上面と、第2棒と第4滑車との間にある第2コンベヤベルトの上面とは第1平面内に配置され、第2棒と第2滑車との間にある第1コンベヤベルトの上面と、第3滑車と第1棒との間にある第2コンベヤベルトの上面とは第2平面内に配置される。第1平面は第1平面から離間される。1つの実施形態では、第1コンベヤベルトおよび第2コンベヤベルトの厚さ未満の距離まで、第1平面は第2平面から離間される。
【0014】
1つの実施形態では、第1コンベヤベルトの上面は、第1棒から第2棒に移動する際に第1平面から第2平面に遷移し、第2コンベヤベルトの上面は、第1棒から第2棒に移動する際に第2平面から第1平面に遷移する。1つの実施形態では、コンベヤ組立体は、第3滑車と第2滑車との間で第1コンベヤベルトおよび第2コンベヤベルトに沿って第1棒および第2棒を移動させる、運び台と連動する駆動機構を含む。1つの実施形態では、駆動機構は、第1コンベヤベルトおよび第2コンベヤベルトの両側で運び台に取り付けられた2つのタイミングベルトを含む。
【0015】
本発明の例示的な実施形態は、コンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法も対象とする。本方法によれば、複数の平行な第1コンベヤベルトおよび複数の平行な第2コンベヤベルトが、例えば、滑車の周辺で回転される。第2コンベヤベルトは第1コンベヤベルトに対して平行であり、かつ所定の長さに沿って第1コンベヤベルトと分散配置されている。第1コンベヤベルトは、回転方向において所定の長さの範囲内で、所定の平面について第1高度から第2高度に遷移する。加えて、第2コンベヤベルトは、回転方向において所定の長さの範囲内で所定の平面について第3高度から第4高度に遷移する。1つの実施形態では、第3高度は第1高度より小さく、第2高度は第4高度より小さい。遷移領域は、分散配置された第1コンベヤベルトおよび第2コンベヤベルトの所定の長さの範囲内で画定され、そこで、第1コンベヤベルトおよび第2コンベヤベルトは、回転方向に対して垂直な方向で側方に偏移し、第1高度から第2高度へ、および第3高度から第4高度へそれぞれ遷移する。
【0016】
1つの実施形態では、遷移領域を画定することは、第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて第1コンベヤベルトを走らせることと、第1棒上の低部ベルトガイドおよび第2棒上の高部ベルトガイドを通じて第2コンベヤベルトを走らせることとをさらに含む。加えて、第1棒および第2棒は、遷移領域を移動させるように第1コンベヤベルトおよび第2コンベヤベルトに沿って移動される。1つの実施形態では、第1コンベヤベルトを遷移させることは、溝床の上面から溝床内の複数の平行溝のうち1つに各第1コンベヤベルトを移動させることを含む。加えて、第2コンベヤベルトを遷移させることは、平行溝のうち1つから上面に各第2コンベヤベルトを移動させることを含む。
【図面の簡単な説明】
【0017】
【図1】本発明に従うコンベヤ組立体の一実施形態の斜視図である。
【図2】コンベヤ組立体の上面図である。
【図3】コンベヤ組立体の側面図である。
【図4】図2の線4‐4を通じる図である。
【図5】本発明の溝床および運び台の断面の図である。
【図6】遷移領域内におけるコンベヤ組立体の部分断面の側面図である。
【図7】本発明に従う運び台の棒のガイドおよび溝床の一実施形態の実例である。
【発明を実施するための形態】
【0018】
初めに図1〜図3を参照すると、本発明の例示的実施形態はコンベヤ組立体100を対象としている。コンベヤ組立体は、製造設備内での工程または作業の合間に、製造製品、例えば、焼き物または焼き菓子を移動させる。工程または作業の合間に移動する製品に加え、コンベヤ組立体は2つの作業間における任意の速度差を補正し、当該システム内で緩衝器または集積器として機能する。コンベヤ組立体は、受け取りベルトと呼ばれる少なくとも1つの第1コンベヤベルト102と、荷下ろしベルトと呼ばれる少なくとも1つの第2コンベヤベルト104とを含む。本発明はちょうど2つのベルト、単一の第1コンベヤベルトおよび単一の第2コンベヤベルトを利用することができるが、好ましくは、コンベヤ組立体は、複数の第1コンベヤベルト102および複数の第2コンベヤベルト104を含む。コンベヤベルトにとって適切な種類および素材は、当該技術分野で知られかつ利用可能である。コンベヤベルトは、正方形または円形の横断面を有する場合がある。1つの実施形態では、各コンベヤベルトは鎖である。好ましくは、コンベヤベルトはゴム系化合物から構築され、かつ紐等の補強材を含む。
【0019】
複数の第1コンベヤベルト102は、少なくとも2つの滑車、第1滑車106および第2滑車108の周辺を回転する。複数の第2コンベヤベルト104も、少なくとも2つの滑車、第3滑車110および第4滑車112の周辺を回転する。第3滑車110が第1滑車106と第2滑車108との間に配置され、かつ第2滑車108が第3滑車110と第4滑車112との間に配置されるように、滑車は一列に配列される。1つの実施形態では、第1滑車および第4滑車が実質的に共平面であり、第3滑車および第2滑車が実質的に共平面である。滑車にとって適切な素材は、当該技術分野で知られかつ利用可能である。1つの実施形態では、各組の滑車における滑車のうち少なくとも1つは電源(図示せず)に取り付けられ、当業者には恐らく明らかなように、そうした滑車に取り付けられた滑車およびベルトを回転させる。追加の滑車を含めることができる可能性があるが、好ましくは、配列を簡素かつ小型にし、かつ既存の製造工程に容易に挿入または追加導入されるように、コンベヤ組立体はちょうど4つの滑車を含む。
【0020】
1つの実施形態では、複数の第1コンベヤベルトは平行であり、複数の第2コンベヤベルトも互いにかつ第1コンベヤベルトに対して平行である。第1コンベヤベルトおよび第2コンベヤベルトは所定の長さに沿って分散配置されることが好ましく、具体的には、第1コンベヤベルト、第2コンベヤベルト、第1コンベヤベルトなどの交互の様式で配列される。第1コンベヤベルトおよび第2コンベヤベルトは同じ方向に回転するが、第1コンベヤベルトおよび第2コンベヤベルトは異なる速度で回転することが好ましい。1つの実施形態では、第2コンベヤベルトは第1コンベヤベルトより遅い速度で回転する。
【0021】
第1コンベヤベルトおよび第2コンベヤベルトは、第3滑車110と第2滑車108との間に概して画定される領域内で分散配置されている。図4で最良に例解されているように、コンベヤベルトが重なり合うか分散配置されている領域内において、第1コンベヤベルト102および第2コンベヤベルト104の相対高度に差異が存在する。コンベヤ組立体100に沿って運ばれる製品124は、第1コンベヤベルトおよび第2コンベヤベルトの両方の上面122(図3)にのみ接する。従って、図4中における第1組のコンベヤベルトでのように、一方の組のベルトが他方の組のベルトより高い場合、製品124は第1コンベヤベルト102の上面122と接触するのみである。製品124は、従って、第1コンベヤベルトが動いている任意の速度で第1コンベヤベルト102により運搬され、第2コンベヤベルト104は製品124と接触することなく製品の下に沿って動く。2つの組のコンベヤベルトの間で製品を取り換えることは、第1コンベヤベルトおよび第2コンベヤベルトの相対高度を変更することにより達成される。
【0022】
本発明に従うコンベヤ組立体100の例示的な実施形態は、第1コンベヤベルト102と第2コンベヤベルト104との相対高度の変化を与える機構を含む。相対高度のこうした変化は、第1コンベヤベルトと第2コンベヤベルトとの間にあるコンベヤ組立体上を動く製品を遷移させる。1つの実施形態では、コンベヤ組立体は、第1および第2の複数のベルトにわたって垂直に延在する2つの棒116を含む運び台114を含む。これらの2つの棒は第1棒118および第2棒120を含む。第1棒118は第3滑車110と第2棒120との間に配置され、第2棒は第1棒118と第2滑車108との間に配置される。棒にとって適切な素材としては、プラスチック類、セラミック類、およびステンレス鋼等の金属類が挙げられる。1つの実施形態では、棒は約4インチから約6インチまで離間される。
【0023】
図7を参照すると、各棒は、複数の高部ベルトガイド126および複数の低部ベルトガイド128を含む。従って、第1棒118は、複数の第1棒の低部ベルトガイドおよび複数の第1棒の高部ベルトガイドを含み、第2棒は、複数の第2棒の低部ベルトガイドおよび複数の第2棒の高部ベルトガイドを含む。各ベルトガイドはコンベヤベルトの形状に対応する横断面形状を有し、固着することなくコンベヤベルトがガイドを通過することを可能にするのに十分に大きい大きさにされる。例解されているように、各ベルトガイドは概して円形の横断面を有する。各ガイドは、コンベヤベルトのガイドを通じる通過を容易にするために、Teflon(登録商標)の裏地および傾斜または面取りした縁等の潤滑材も含む場合がある。高部ベルトガイドは各コンベヤベルトの外周の周辺に延在する。好ましくは、高部ベルトガイドはコンベヤベルトの外周の半分より多くの周辺に延在し、従って、高部ベルトガイドはコンベヤベルトを適所に保持し、コンベヤベルトがガイドの外に浮き上がることを防ぐ。各ベルトの上面122は高部ベルトガイドの外に延在し、棒の上側面130の上方にある。1つの実施形態では、低部ベルトガイドは各コンベヤベルトの周辺にある外周の半分に延在する。好ましくは、各コンベヤベルトが各棒の下側面132を越えて延在するように、低部ベルトガイドは各コンベヤベルトの外周の半分より多くの周辺に延在する。
【0024】
2つの棒上にある運び台および特にベルトガイドは、コンベヤシステムに沿って第1コンベヤベルトから第2コンベヤベルトへ動かされる製品を遷移させるように、第1コンベヤベルトおよび第2コンベヤベルトの相対高度を変更するために用いられる。1つの実施形態では、第1コンベヤベルトの一つ一つは、第1棒の高部ベルトガイドのうち1つおよび第2棒の低部ベルトガイドのうち1つを通る。第2コンベヤベルトの一つ一つは、第1棒の低部ベルトガイドのうち1つおよび第2棒の高部ベルトガイドのうち1つを通る。従って、第1コンベヤベルトおよび第2コンベヤベルトの回転方向にある第1棒から第2棒に移動する際に、第1コンベヤベルトは比較的高い位置から比較的低い位置に遷移する。反対に、第1棒から第2棒に移動する際に、第2コンベヤベルトは比較的低い位置から比較的高い位置に遷移する。従って、運び台114はコンベヤ組立体100の遷移領域134内に配置され、かつこれを画定する。これは、約4インチから約6インチの長さを有する遷移領域を創出する。
【0025】
図5および図6を参照すると、1つの実施形態では、第1コンベヤベルト102の一つ一つおよび第2コンベヤベルト104の一つ一つは、第1棒と第2棒との間にある遷移領域134内に側方屈曲136を含む。側方屈曲136は、矢印Aにより示されているような第1コンベヤベルトおよび第2コンベヤベルトの回転方向に対して、垂直な方向に延在する。側方屈曲は、単一の第1コンベヤベルト102および単一の第2コンベヤベルト104に関して図5で例解されているが、側方屈曲は複数の第1コンベヤベルトおよび第2コンベヤベルトの全てに関して同じである。第1棒の高部ベルトガイド126および第2棒の高部ベルトガイド126は平行軸138に沿って整列され、かつ、コンベヤベルトの回転方向に対して垂直な軸に沿って下方ベルトガイドから側方に偏る。下方ベルトガイドも平行軸に沿って整列される。従って、所定のコンベヤベルトは、高部ベルトガイドから低部ベルトガイドに移動する際に、または低部ベルトガイドから後部ベルトガイドに移動する際に、偏った平行軸の間で側方に偏移する。全ての第1コンベヤベルトおよび第2コンベヤベルトは側方に偏移しかつ高部ベルトガイドと低部ベルトガイドとの間を移動し、それ故、重なり合うか交わることなく高相対位置および低相対位置が生じる。ベルトは偏移の領域内で平行のままである。
【0026】
図3および図6で例解されているように、第1コンベヤベルトおよび第2コンベヤベルトの上面122は、2つの異なる高度にある2つの平面の間で遷移する。第1コンベヤベルトおよび第2コンベヤベルトの一つ一つは、コンベヤ組立体100に沿って進行する製品と接触する上面122を含む。第1滑車106と第1棒118との間にある第1コンベヤベルトの上面122と、第2棒120と第4滑車112との間にある第2コンベヤベルトの上面122とは、第1平面140内に配置される。第2棒120と第2滑車108との間にある第1コンベヤベルトの上面122と、第3滑車110と第1棒118との間にある第2コンベヤベルトの上面122とは、第2平面142内に配置される。第1平面140は第2平面142から離間される。好ましくは、第1コンベヤベルトおよび第2コンベヤベルトの厚さ未満の距離まで、第1平面140は第2平面142から離間される。第1コンベヤベルトの上面122は、第1棒118から第2棒120に移動する際に第1平面140から第2平面142に遷移し、第2コンベヤベルトの上面122は、第1棒118から第2棒120に移動する際に第2平面142から第1平面140に遷移する。コンベヤ組立体により運ばれる製品は、第1平面140内に位置する上面122と接触する。
【0027】
遷移領域は、第1コンベヤベルトと第2コンベヤベルトとの間における製品の遷移を画定する。第2コンベヤベルトへ移される前に、第1コンベヤベルト上に集積する製品数の増加または減少に順応するように、この遷移領域を移動させることができる。遷移領域134の移動は、第3滑車110と第2滑車108との間で運び台114を動かすことにより達成される。1つの実施形態では、コンベヤ組立体100は、第3滑車110と第2滑車108との間で第1コンベヤベルトおよび第2コンベヤベルトに沿って第1棒および第2棒を移動させる、運び台114と連動する駆動機構144を含む。適切な駆動機構は、第1コンベヤベルトおよび第2コンベヤベルトの両側で運び台114に取り付けられた2つのタイミングベルト146を含む。タイミングベルトの回転がコンベヤベルトの長さに沿って運び台を動かすように、運び台は各タイミングベルトに固定して取り付けられる。1つの実施形態では、タイミングベルトは運び台に締めネジで固定される締め具により運び台に取り付けられる。締め具は、タイミングベルトの歯を整合させる溝を有する底板115(図3)と、底板に締めネジで固定する上板117(図2)とを含む。タイミングベルトは上板と底板との間に締め具で固定される。タイミングベルト、タイミングベルトの鎖歯車、溝を有する底板、および上板は、当該技術分野で知られかつ市販されている。1つの実施形態では、運び台はコンベヤベルトの両側に底板および上板を含み、棒は上板に締めネジで固定されかつそれらの間に延在する。
【0028】
タイミングベルトは、第1コンベヤベルトおよび第2コンベヤベルトに対して平行に走る。運び台114の運動および位置を制御するために、制御電子機器およびセンサが設けられる。1つの実施形態では、第1センサ148は第3滑車110に隣接して配置され、第2センサ150は第3滑車110と第2滑車108との間に設けられる。適切なセンサとしては、センサの位置におけるコンベヤベルト上の製品の存在または不在を検出することができる光学センサ、例えば赤外線センサが挙げられる。センサは、製品が第3滑車と第2滑車との間にある領域に入る時間と、センサ間を移動している製品の速度と、製品がコンベヤベルト上に集積しているかどうかと、ならびに製品の集積量とについての情報を提供する。センサから得られる情報を前提として、運び台はコンベヤベルトに沿って適切な方向に動かされる。適切な制御電子機器およびセンサは、当該技術分野で知られかつ利用可能である。1つの実施形態では、コンベヤシステムはプログラム可能論理制御装置(PLC)またはコンピュータにより制御される。受け取りコンベヤおよび運び台の駆動システムは符号器を装備している。受け取り光電セル148が新たな製品を検出する時、受け取りコンベアの符号器の読み込みデータは先入れ先出しスタック(FIFO)に入れられる。制御装置は、符号器のデータを用いて、当該技術分野で知られているように受け取りコンベヤの速度を計算する。制御装置は符号器の読み込みデータをFIFOから取り出し、当該技術分野で知られているようにこの製品(運び台に到達する次の製品)の位置を計算する。この製品の速度および位置から、制御装置は運び台が戻って製品のために空間を創出する時間および速度を計算する。製品が荷下ろしコンベア上にあった後に、制御装置はFIFOからの次の符号器の読み取りデータで当該工程を繰り返すことになる。
【0029】
1つの実施形態では、コンベヤ組立体は、第3滑車110と第2滑車108との間において、コンベヤベルトの下、またはコンベヤベルトの回転する輪の内側に延在する固定された溝床152も含む。溝床152にとって適切な素材としては、プラスチック類、セラミック類、およびステンレス鋼等の金属類が挙げられる。溝床152は、第1コンベヤベルトおよび第2コンベヤベルトの相対高度の遷移を容易にするように、運び台と連動して動作する。溝床は、コンベヤ組立体内のコンベヤベルトのための支持の全てを移動および供給しないことが好ましい。従って、コンベヤ組立体の全体の深さは、コンベヤベルトを有する第1滑車から第4滑車までの大きさにより画定される。溝床152は、第1端部154と、第1端部と反対側の第2端部156と、第1端部154から第2端部156に延在する上面158とを含む。1つの実施形態では、溝床は少なくとも2つの平行溝160、例えば、上面158を通る第1平行溝および第2平行溝を含む。好ましくは、溝床152は、第1端部と第2端部との間にある溝床を通る、複数の平行溝160を含む。平行溝160は、図5で例解されているように、上面158を複数の溝間平行部分に分割する。1つの実施形態では、平行溝160は第1コンベヤベルトおよび第2コンベヤベルトに対して平行に配列される。平行溝は、コンベヤベルトの形状に対して相補的である横断面形状を有する。代替的には、平行溝は、ベルト、例えば、正方形の溝または溝穴である溝における丸ベルトの横断面形状以外に成形される。
【0030】
図7で例解されているように、1つの実施形態では、複数の平行溝の一つ一つは、円形のコンベヤベルトを相補する半円形の横断面形状を有する。好ましくは、半円形の形状は、コンベヤベルトが溝の中および外へ自由に動くことができるように、コンベヤベルトの外周の半分以下である。図7は、溝床の上面158に沿って動く高部コンベヤベルトが、運び台114の領域内にある溝床の上面158の上に拾い上げられるか持ち上げられることを例解している。これは、運び台の領域内にある第1平面140のわずかに上に上方コンベヤベルトの上面を上昇させる。コンベヤベルトは、運び台の各棒における高部ベルトガイドの下にある棒の素材の量に対応して、約1/16インチのみ持ち上げられる。この素材および高部ベルトガイドの離間により、高部ベルトガイドおよび低部ベルトガイドが棒の長さに沿って重なり合う際に、誘導棒132を半分に切断する必要なく、単一の棒に高部ベルトガイドと低部ベルトガイドを配置することが容易になる。
【0031】
1つの実施形態では、第1コンベヤベルト102は、第1端部154で溝床152の上面158に沿い、第2端部156で溝床152内における複数の溝160を通る。第2コンベヤベルト104は、第1端部154で溝床152内における複数の溝160を通り、第2端部156で溝床152の上面158に沿う。第1コンベヤベルト102は、運び台114により画定された遷移領域134内で上面158から溝160を通過し、第2コンベヤベルト104は、当該遷移領域で溝160から上面158を通過する。運び台の第1棒と第2棒との間にある遷移領域内の第1コンベヤベルトおよび第2コンベヤベルトにおける側方屈曲136は、複数の溝に対して垂直な方向にある。従って、遷移領域内の各コンベヤベルトは、溝床の溝と上面との間で側方に偏移する。
【0032】
図6を参照すると、第1コンベヤベルト102は、第1端部から第1棒までにおいて上面158の上方に第1距離162まで、および、第2棒120から第2端部までにおいて上面158の上方に第2距離164まで延在している。第1距離162は第2距離164より大きい。第2コンベヤベルト104は、第1端部154から第1棒118までにおいて上面158の上方に第2距離164まで、および、第2棒120から第2端部156までにおいて上面158の上方に第1距離162まで延在している。運び台114は溝床の上面の上方に延在し、かつ、遷移領域の位置を画定する溝床の第1端部または第2端部の何れかに向かって可動である。以上で検討されたように、第1コンベヤベルトおよび第2コンベヤベルトは運び台を通過する。
【0033】
図2および図5で例解されているように、運び台の第1棒および第2棒は溝に対して垂直に延在している。第1棒118は、溝床の第1端部と第2棒120との間に配置される。第1棒および第2棒の高部ベルトガイドは、第1溝160および第2溝160に対して平行な軸138に沿って整列されるが、溝床152の上面158部分の上方に配置される。低部ベルトガイドは溝床内の溝160と整列され、かつ当該溝の上方に配置される。第1コンベヤベルト102は、遷移領域134を通じて動く際に、第1棒118内の高部ベルトガイド126から第2棒120内の低部ベルトガイド128に動き、そして低部ベルトガイドがその上方に位置する溝160の中へ動く。第2コンベヤベルト104は、遷移領域134を通じて動く際に、第1棒118内の低部ベルトガイド128から第1棒の低部ベルトガイドと整列される溝160の外に動き、そして第2棒120内の高部ベルトガイド126の中へ動く。これは、第1コンベヤベルトと第2コンベヤベルトとの間の相対高度を変化させ、かつ、第1コンベヤベルトから第2コンベヤベルトへの製品の交換を提供する。
【0034】
本発明の例示的な実施形態は、本発明のコンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法も対象とする。複数の平行な第1コンベヤベルトおよび複数の平行な第2コンベヤベルトは、対応する対の鎖歯車、駆動輪または滑車の周辺で回転される。第2コンベヤベルトは第1コンベヤベルトに対して平行であり、かつ、所定の長さに沿って第1コンベヤベルトと分散配置される。第1コンベヤベルトは、第2コンベヤベルトとの重複部分のその所定の長さの範囲内における回転方向にある所定の平面に関して、第1高度から第2高度に遷移される。加えて、第2コンベヤベルトは、当該所定の長さの範囲内における回転方向にある所定の平面に関して、第3高度から第4高度に遷移される。第3高度は第1高度より小さく、第2高度は第4高度より小さい。好ましくは、以上で検討されているように、第3高度および第2高度は同等であり、第1高度および第4高度は同等である。コンベヤベルト間に高度の相対変化を創出するように、その周辺でコンベヤベルトが回転する滑車を位置付けることができる。遷移領域は、分散配置された第1コンベヤベルトおよび第2コンベヤベルトの所定の長さの範囲内で画定される。この遷移領域内では、第1コンベヤベルトおよび第2コンベヤベルトは、それらの回転方向に対して垂直な方向で側方に偏移し、第1高度から第2高度へ、および第3高度から第4高度へそれぞれ遷移する。
【0035】
1つの実施形態では、遷移領域を画定するために、第1コンベヤベルトは第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて走らされ、第2コンベヤベルトは第1棒上の低部ベルトガイドおよび第2棒上の高部ベルトガイドを通じて走らされる。これは、第1コンベヤベルトと第2コンベヤベルトとの間の相対高度を遷移させる。1つの実施形態では、互いに対して固定されるこれらの棒は、第1コンベヤベルトおよび第2コンベヤベルトに沿って動かされ、遷移領域を移動させる。1つの実施形態では、溝床は遷移領域内で用いられ、各第1コンベヤベルトは、溝床の上面から溝床内における複数の平行溝のうち1つに動かされる。加えて、各第2コンベヤベルトは平行溝のうち1つから上面に動かされる。1つの実施形態では、第1棒および第2棒は、溝床の溝と上面との間におけるコンベヤベルトの移動を支援するために用いられる。この溝床は第1コンベヤベルトおよび第2コンベヤベルトの下に位置し、かつ遷移領域全体にわたってコンベヤベルトのための支持を提供する。
【0036】
本明細書で開示されている発明の例解的な実施形態が本発明の目的を満たすことは明白であるものの、当業者が多数の修正および他の実施形態を考案することができることを十分に理解されたい。加えて、任意の実施形態からの1つまたは複数の特徴および/または1つまたは複数の要素を、単独に、または他の1つまたは複数の実施形態と組み合わせて用いることができ、本発明に従う方法からのステップまたは要素を、任意の適切な順序で実行または実施することができる。従って、添付の特許請求の範囲は全てのこのような修正および実施形態を含めることを目的とし、それらは本発明の趣旨および範囲の中に入ることになる可能性があることを理解されたい。
【特許請求の範囲】
【請求項1】
第1端部と、第2端部と、前記第1端部から前記第2端部に延在する上面と、前記上面を通る第1平行溝および第2平行溝とを備える溝床と、
前記第1端部にある前記溝床の前記上面に沿っており、かつ前記第2端部にある前記溝床内の前記第2溝を通る第1コンベヤベルトと、
前記第1端部にある前記溝床内の前記第1溝を通り、かつ前記第2端部にある前記溝床の前記上面に沿っている第2コンベヤベルトと、
前記溝床の前記第1端部と前記第2端部との間にある遷移領域であって、前記第1コンベヤベルトは前記上面から前記第2溝を通過し、前記第2コンベヤベルトは前記第2溝から前記遷移領域の前記上面を通過する、遷移領域と、
を備える、コンベヤ組立体。
【請求項2】
前記第1コンベヤベルトおよび前記第2コンベヤベルトがそれぞれ、前記溝に対して垂直な方向にある前記遷移領域内に側方屈曲を含む、請求項1に記載のコンベヤ組立体。
【請求項3】
前記第1コンベヤベルトが、前記第1端部で前記上面より上の第1距離まで延在し、前記第2端部で前記上面より上の第2距離まで延在し、前記第1距離は前記第2距離より大きく、
前記第2コンベヤベルトが、前記第1端部で前記上面より上の前記第2距離まで延在し、前記第2端部で前記上面より上の前記第1距離まで延在する、
請求項1に記載のコンベヤ組立体。
【請求項4】
前記溝床の前記上面の上方に延在し、かつ、前記遷移領域の位置を画定する前記溝床の前記第1端部または前記第2端部の何れかに向かって可動な運び台をさらに備え、前記第1コンベヤベルトおよび前記第2コンベヤベルトは前記運び台を通過する、請求項1に記載のコンベヤ組立体。
【請求項5】
前記運び台が、第1棒と、前記第1棒から離間された第2棒とを備え、前記第1棒および前記第2棒は前記溝に対して垂直に延在し、前記第1棒は前記溝床の前記第1端部と前記第2棒との間に配置される、請求項4に記載のコンベヤ組立体。
【請求項6】
前記第1棒が高部ベルトガイドおよび低部ベルトガイドを備え、前記第1棒の低部ベルトガイドは前記第1溝の上方に配置され、
前記第2棒が高部ベルトガイドおよび低部ベルトガイドを備え、前記第2棒の低部ベルトガイドは前記第2溝の上方に配置され、
前記第1棒の高部ベルトガイドおよび前記第2棒の高部ベルトガイドが、前記第1溝および前記第2溝に対して平行な軸に沿って整列される、
請求項5に記載のコンベヤ組立体。
【請求項7】
前記第1コンベヤベルトが前記第1棒の高部ベルトガイドおよび前記第2棒の低部ベルトガイドを通り、前記第2コンベヤベルトが前記第1棒の低部ベルトガイドおよび前記第2棒の高部ベルトガイドを通る、請求項6に記載のコンベヤ組立体。
【請求項8】
前記溝床が複数の平行溝を備え、前記組立体は、
前記第1端部で前記溝床の前記上面に沿いかつ前記第2端部で前記溝床内の前記溝を通る複数の第1コンベヤベルトと、
前記第1端部で前記溝床内の前記溝を通りかつ前記第2端部で前記溝床の前記上面に沿う複数の第2コンベヤベルトと、
をさらに備え、
前記遷移領域において、前記第1コンベヤベルトは前記上面から前記溝へ通過し、前記第2コンベヤベルトは前記溝から前記上面へ通過する、
請求項1に記載のコンベヤ組立体。
【請求項9】
前記溝床の前記上面の上方に延在し、かつ、前記遷移領域の位置を画定する前記溝床の前記第1端部または前記第2端部の何れかに向かって可動な運び台をさらに備え、前記運び台は、
複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第1棒であって、前記第1棒の低部ベルトガイドは前記複数の溝の上方に配置される、第1棒と、
前記第1棒に対して平行な、かつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第2棒であって、前記第2棒の低部ベルトガイドは前記複数の溝の上方に配置される、第2棒と、
を備え、
前記第1棒の高部ベルトガイドおよび前記第2棒の高部ベルトガイドは、前記複数の溝に対して平行な軸に沿って整列され、かつ、前記複数の溝に対して垂直な軸に沿って下方ベルトガイドから側方に偏る、
請求項8に記載のコンベヤ組立体。
【請求項10】
前記第1コンベヤベルトが前記第1棒の高部ベルトガイドおよび前記第2棒の低部ベルトガイドを通り、前記第2コンベヤベルトが前記第1棒の低部ベルトガイドおよび前記第2棒の高部ベルトガイドを通る、請求項9に記載のコンベヤ組立体。
【請求項11】
第1滑車および第2滑車の周辺を回転する複数の第1ベルトと、
第3滑車および第4滑車の周辺を回転する複数の第2ベルトであって、前記滑車は、前記第3滑車が前記第1滑車と前記第2滑車との間に配置され、かつ前記第2滑車が前記第3滑車と前記第4滑車との間に配置されるように一列に配列される、複数の第2ベルトと、
前記複数の第1ベルトおよび前記複数の第2ベルトにわたって垂直に延在する2つの棒を備える運び台であって、前記2つの棒は、
前記第3滑車と前記第2棒との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第1棒と、
前記第1棒と前記第2滑車との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第2棒と、
を備える、運び台と、
を備え、
第1コンベヤベルトの一つ一つは、前記第1棒の高部ベルトガイドのうち1つおよび前記第2棒の低部ベルトガイドのうち1つを通り、第2コンベヤベルトの一つ一つは、前記第1棒の低部ベルトガイドのうち1つおよび前記第2棒の高部ベルトガイドのうち1つを通る、コンベヤ組立体。
【請求項12】
前記第1コンベヤベルトの一つ一つおよび前記第2コンベヤベルトの一つ一つが前記第1棒と前記第2棒との間にある遷移領域内に側方屈曲を含み、前記側方屈曲は前記第1コンベヤベルトおよび前記第2コンベヤベルトの回転方向に対して垂直な方向に延在する、請求項11に記載のコンベヤ組立体。
【請求項13】
前記複数の第1コンベヤベルトおよび前記複数の第2コンベヤベルトの一つ一つが上面を備え、前記第1滑車と前記第1棒との間にある前記第1コンベヤベルトの上面と、前記第2棒と前記第4滑車との間にある前記第2コンベヤベルトの上面とは第1平面内に配置され、前記第2棒と前記第2滑車との間にある前記第1コンベヤベルトの上面と、前記第3滑車と前記第1棒との間にある前記第2コンベヤベルトの上面とは第2平面内に配置され、前記第1平面は前記第1平面から離間される、請求項11に記載のコンベヤ組立体。
【請求項14】
前記第1平面が、前記第1コンベヤベルトおよび前記第2コンベヤベルトの厚さ未満の距離まで前記第2平面から離間される、請求項13に記載のコンベヤ組立体。
【請求項15】
前記第1コンベヤベルトの上面が、前記第1棒から前記第2棒に移動する際に前記第1平面から前記第2平面に遷移し、前記第2コンベヤベルトの上面が、前記第1棒から前記第2棒に移動する際に前記第2平面から前記第1平面に遷移する、請求項13に記載のコンベヤ組立体。
【請求項16】
前記第3滑車と前記第2滑車との間で前記第1コンベヤベルトおよび前記第2コンベヤベルトに沿って前記第1棒および前記第2棒を移動させる、前記運び台と連動する駆動機構をさらに備える、請求項11に記載のコンベヤ組立体。
【請求項17】
前記駆動機構が、前記第1コンベヤベルトおよび前記第2コンベヤベルトの両側で前記運び台に取り付けられた2つのタイミングベルトを備える、請求項11に記載のコンベヤ組立体。
【請求項18】
コンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法であって、前記方法は、
複数の平行な第1コンベヤベルトを回転させることと、
複数の平行な第2コンベヤベルトを回転させることであって、前記第2コンベヤベルトは前記第1コンベヤベルトに対して平行であり、かつ所定の長さに沿って前記第1コンベヤベルトと分散配置されることと、
前記所定の長さの範囲内における回転方向で所定の平面について第1高度から第2高度に前記第1コンベヤベルトを遷移させることと、
前記所定の長さの範囲内における回転方向で所定の平面について第3高度から第4高度に前記第2コンベヤベルトを遷移させることであって、前記第3高度は前記第1高度より小さく、前記第2高度は前記第4高度より小さいことと、
分散配置された第1コンベヤベルトおよび第2コンベヤベルトの前記所定の長さの範囲内で遷移領域を画定することであって、そこで、前記第1コンベヤベルトおよび前記第2コンベヤベルトは、前記回転方向に対して垂直な方向で側方に偏移し、前記第1高度から前記第2高度へ、および前記第3高度から前記第4高度へそれぞれ遷移することと、
を含む、方法。
【請求項19】
前記遷移領域を画定するステップが、第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて前記第1コンベヤベルトを走らせることと、前記第1棒上の低部ベルトガイドおよび前記第2棒上の高部ベルトガイドを通じて前記第2コンベヤベルトを走らせることとをさらに含み、前記方法は、前記遷移領域を移動させるように、前記第1コンベヤベルトおよび前記第2コンベアベルトに沿って前記第1棒および前記第2棒を移動させることをさらに含む、請求項18に記載の方法。
【請求項20】
前記第1コンベヤベルトを遷移させるステップが、溝床の上面から前記溝床内の複数の平行溝のうち1つに各第1コンベヤベルトを移動させることをさらに含み、
前記第2コンベヤベルトを遷移させるステップが、前記平行溝のうち1つから前記上面に各第2コンベヤベルトを移動させることを含む、請求項18に記載の方法。
【請求項1】
第1端部と、第2端部と、前記第1端部から前記第2端部に延在する上面と、前記上面を通る第1平行溝および第2平行溝とを備える溝床と、
前記第1端部にある前記溝床の前記上面に沿っており、かつ前記第2端部にある前記溝床内の前記第2溝を通る第1コンベヤベルトと、
前記第1端部にある前記溝床内の前記第1溝を通り、かつ前記第2端部にある前記溝床の前記上面に沿っている第2コンベヤベルトと、
前記溝床の前記第1端部と前記第2端部との間にある遷移領域であって、前記第1コンベヤベルトは前記上面から前記第2溝を通過し、前記第2コンベヤベルトは前記第2溝から前記遷移領域の前記上面を通過する、遷移領域と、
を備える、コンベヤ組立体。
【請求項2】
前記第1コンベヤベルトおよび前記第2コンベヤベルトがそれぞれ、前記溝に対して垂直な方向にある前記遷移領域内に側方屈曲を含む、請求項1に記載のコンベヤ組立体。
【請求項3】
前記第1コンベヤベルトが、前記第1端部で前記上面より上の第1距離まで延在し、前記第2端部で前記上面より上の第2距離まで延在し、前記第1距離は前記第2距離より大きく、
前記第2コンベヤベルトが、前記第1端部で前記上面より上の前記第2距離まで延在し、前記第2端部で前記上面より上の前記第1距離まで延在する、
請求項1に記載のコンベヤ組立体。
【請求項4】
前記溝床の前記上面の上方に延在し、かつ、前記遷移領域の位置を画定する前記溝床の前記第1端部または前記第2端部の何れかに向かって可動な運び台をさらに備え、前記第1コンベヤベルトおよび前記第2コンベヤベルトは前記運び台を通過する、請求項1に記載のコンベヤ組立体。
【請求項5】
前記運び台が、第1棒と、前記第1棒から離間された第2棒とを備え、前記第1棒および前記第2棒は前記溝に対して垂直に延在し、前記第1棒は前記溝床の前記第1端部と前記第2棒との間に配置される、請求項4に記載のコンベヤ組立体。
【請求項6】
前記第1棒が高部ベルトガイドおよび低部ベルトガイドを備え、前記第1棒の低部ベルトガイドは前記第1溝の上方に配置され、
前記第2棒が高部ベルトガイドおよび低部ベルトガイドを備え、前記第2棒の低部ベルトガイドは前記第2溝の上方に配置され、
前記第1棒の高部ベルトガイドおよび前記第2棒の高部ベルトガイドが、前記第1溝および前記第2溝に対して平行な軸に沿って整列される、
請求項5に記載のコンベヤ組立体。
【請求項7】
前記第1コンベヤベルトが前記第1棒の高部ベルトガイドおよび前記第2棒の低部ベルトガイドを通り、前記第2コンベヤベルトが前記第1棒の低部ベルトガイドおよび前記第2棒の高部ベルトガイドを通る、請求項6に記載のコンベヤ組立体。
【請求項8】
前記溝床が複数の平行溝を備え、前記組立体は、
前記第1端部で前記溝床の前記上面に沿いかつ前記第2端部で前記溝床内の前記溝を通る複数の第1コンベヤベルトと、
前記第1端部で前記溝床内の前記溝を通りかつ前記第2端部で前記溝床の前記上面に沿う複数の第2コンベヤベルトと、
をさらに備え、
前記遷移領域において、前記第1コンベヤベルトは前記上面から前記溝へ通過し、前記第2コンベヤベルトは前記溝から前記上面へ通過する、
請求項1に記載のコンベヤ組立体。
【請求項9】
前記溝床の前記上面の上方に延在し、かつ、前記遷移領域の位置を画定する前記溝床の前記第1端部または前記第2端部の何れかに向かって可動な運び台をさらに備え、前記運び台は、
複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第1棒であって、前記第1棒の低部ベルトガイドは前記複数の溝の上方に配置される、第1棒と、
前記第1棒に対して平行な、かつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第2棒であって、前記第2棒の低部ベルトガイドは前記複数の溝の上方に配置される、第2棒と、
を備え、
前記第1棒の高部ベルトガイドおよび前記第2棒の高部ベルトガイドは、前記複数の溝に対して平行な軸に沿って整列され、かつ、前記複数の溝に対して垂直な軸に沿って下方ベルトガイドから側方に偏る、
請求項8に記載のコンベヤ組立体。
【請求項10】
前記第1コンベヤベルトが前記第1棒の高部ベルトガイドおよび前記第2棒の低部ベルトガイドを通り、前記第2コンベヤベルトが前記第1棒の低部ベルトガイドおよび前記第2棒の高部ベルトガイドを通る、請求項9に記載のコンベヤ組立体。
【請求項11】
第1滑車および第2滑車の周辺を回転する複数の第1ベルトと、
第3滑車および第4滑車の周辺を回転する複数の第2ベルトであって、前記滑車は、前記第3滑車が前記第1滑車と前記第2滑車との間に配置され、かつ前記第2滑車が前記第3滑車と前記第4滑車との間に配置されるように一列に配列される、複数の第2ベルトと、
前記複数の第1ベルトおよび前記複数の第2ベルトにわたって垂直に延在する2つの棒を備える運び台であって、前記2つの棒は、
前記第3滑車と前記第2棒との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第1棒と、
前記第1棒と前記第2滑車との間に配置されかつ複数の高部ベルトガイドおよび複数の低部ベルトガイドを備える第2棒と、
を備える、運び台と、
を備え、
第1コンベヤベルトの一つ一つは、前記第1棒の高部ベルトガイドのうち1つおよび前記第2棒の低部ベルトガイドのうち1つを通り、第2コンベヤベルトの一つ一つは、前記第1棒の低部ベルトガイドのうち1つおよび前記第2棒の高部ベルトガイドのうち1つを通る、コンベヤ組立体。
【請求項12】
前記第1コンベヤベルトの一つ一つおよび前記第2コンベヤベルトの一つ一つが前記第1棒と前記第2棒との間にある遷移領域内に側方屈曲を含み、前記側方屈曲は前記第1コンベヤベルトおよび前記第2コンベヤベルトの回転方向に対して垂直な方向に延在する、請求項11に記載のコンベヤ組立体。
【請求項13】
前記複数の第1コンベヤベルトおよび前記複数の第2コンベヤベルトの一つ一つが上面を備え、前記第1滑車と前記第1棒との間にある前記第1コンベヤベルトの上面と、前記第2棒と前記第4滑車との間にある前記第2コンベヤベルトの上面とは第1平面内に配置され、前記第2棒と前記第2滑車との間にある前記第1コンベヤベルトの上面と、前記第3滑車と前記第1棒との間にある前記第2コンベヤベルトの上面とは第2平面内に配置され、前記第1平面は前記第1平面から離間される、請求項11に記載のコンベヤ組立体。
【請求項14】
前記第1平面が、前記第1コンベヤベルトおよび前記第2コンベヤベルトの厚さ未満の距離まで前記第2平面から離間される、請求項13に記載のコンベヤ組立体。
【請求項15】
前記第1コンベヤベルトの上面が、前記第1棒から前記第2棒に移動する際に前記第1平面から前記第2平面に遷移し、前記第2コンベヤベルトの上面が、前記第1棒から前記第2棒に移動する際に前記第2平面から前記第1平面に遷移する、請求項13に記載のコンベヤ組立体。
【請求項16】
前記第3滑車と前記第2滑車との間で前記第1コンベヤベルトおよび前記第2コンベヤベルトに沿って前記第1棒および前記第2棒を移動させる、前記運び台と連動する駆動機構をさらに備える、請求項11に記載のコンベヤ組立体。
【請求項17】
前記駆動機構が、前記第1コンベヤベルトおよび前記第2コンベヤベルトの両側で前記運び台に取り付けられた2つのタイミングベルトを備える、請求項11に記載のコンベヤ組立体。
【請求項18】
コンベヤ組立体上にある一列の均等に離間された物品を集積および荷下ろしするための方法であって、前記方法は、
複数の平行な第1コンベヤベルトを回転させることと、
複数の平行な第2コンベヤベルトを回転させることであって、前記第2コンベヤベルトは前記第1コンベヤベルトに対して平行であり、かつ所定の長さに沿って前記第1コンベヤベルトと分散配置されることと、
前記所定の長さの範囲内における回転方向で所定の平面について第1高度から第2高度に前記第1コンベヤベルトを遷移させることと、
前記所定の長さの範囲内における回転方向で所定の平面について第3高度から第4高度に前記第2コンベヤベルトを遷移させることであって、前記第3高度は前記第1高度より小さく、前記第2高度は前記第4高度より小さいことと、
分散配置された第1コンベヤベルトおよび第2コンベヤベルトの前記所定の長さの範囲内で遷移領域を画定することであって、そこで、前記第1コンベヤベルトおよび前記第2コンベヤベルトは、前記回転方向に対して垂直な方向で側方に偏移し、前記第1高度から前記第2高度へ、および前記第3高度から前記第4高度へそれぞれ遷移することと、
を含む、方法。
【請求項19】
前記遷移領域を画定するステップが、第1棒上の高部ベルトガイドおよび第2棒上の低部ベルトガイドを通じて前記第1コンベヤベルトを走らせることと、前記第1棒上の低部ベルトガイドおよび前記第2棒上の高部ベルトガイドを通じて前記第2コンベヤベルトを走らせることとをさらに含み、前記方法は、前記遷移領域を移動させるように、前記第1コンベヤベルトおよび前記第2コンベアベルトに沿って前記第1棒および前記第2棒を移動させることをさらに含む、請求項18に記載の方法。
【請求項20】
前記第1コンベヤベルトを遷移させるステップが、溝床の上面から前記溝床内の複数の平行溝のうち1つに各第1コンベヤベルトを移動させることをさらに含み、
前記第2コンベヤベルトを遷移させるステップが、前記平行溝のうち1つから前記上面に各第2コンベヤベルトを移動させることを含む、請求項18に記載の方法。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2011−530466(P2011−530466A)
【公表日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2011−523017(P2011−523017)
【出願日】平成21年6月28日(2009.6.28)
【国際出願番号】PCT/US2009/048981
【国際公開番号】WO2010/019321
【国際公開日】平成22年2月18日(2010.2.18)
【出願人】(511034572)
【Fターム(参考)】
【公表日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成21年6月28日(2009.6.28)
【国際出願番号】PCT/US2009/048981
【国際公開番号】WO2010/019321
【国際公開日】平成22年2月18日(2010.2.18)
【出願人】(511034572)
【Fターム(参考)】
[ Back to top ]