
コンベヤ装置
【課題】駆動速度の異なる2列のコンベヤ83,85に受け皿11を跨らせて横回転させながら搬送することによって、前記受け皿11の搬送姿勢を揃えるコンベヤ装置80において、姿勢揃え時の脱落の衝撃で、前記受け皿11上の農産物Aが落下するのを防止できるようにする。
【解決手段】前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなる。前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせる。前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させる。
【解決手段】前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなる。前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせる。前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、例えばマンゴー、ゴーヤ、桃、梨、柑橘類、リンゴ、メロンといった農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置に関するものである。
【背景技術】
【0002】
従来から、農産物を搬送するコンベヤ装置に用いられる受け皿としては、目的に応じた様々な形態のものが提案されている。例えばフリートレイ式の受け皿は、搬送、分岐、集積といった動作をし易いように平面視円形の形態になっている。しかし、この種の受け皿は、動作の自由度が大きい反面、例えば受け皿に載置された農産物の検査のために、受け皿を所定の姿勢に揃える(受け皿の向きを一定に揃える)のが難しい。この点を解消する装置としては、例えば特許文献1に開示されたコンベヤ装置がある。
【0003】
特許文献1のコンベヤ装置では、左右一対の第1コンベヤの間に、これら両第1コンベヤより一段低い第2コンベヤを配置し、左右の第1コンベヤの駆動速度に速度差を持たせて受け皿を水平回転させる。受け皿の底部には左右一対の凹み部が形成されている。凹み部がそれぞれ左右の第1コンベヤに重なるまで受け皿を水平回転させて、左右両第1コンベヤの上面からその間の第2コンベヤの上面に、受け皿全体を脱落させる。その結果、向きが揃った状態の受け皿が第2コンベヤにて搬送される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−290797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、前記特許文献1のコンベヤ装置では、受け皿の向きを揃えるのに、左右両第1コンベヤの上面から第2コンベヤの上面に受け皿全体を脱落させるため、左右両第1コンベヤの上面から第2コンベヤの上面までの落差(高低差)によっては、脱落の衝撃で農産物が受け皿から落下する可能性を否定できないのであった。本願発明は、前記先願の考え方を更に止揚・発展させ、より改善されたコンベヤ装置を提供することを技術的課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明は、農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させるというものである。
【0007】
請求項2の発明は、請求項1に記載したコンベヤ装置において、前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送されるというものである。
【0008】
請求項3の発明は、請求項2に記載したコンベヤ装置において、前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されているというものである。
【0009】
請求項4の発明は、請求項1〜3のうちいずれかに記載したコンベヤ装置において、前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されているというものである。
【発明の効果】
【0010】
請求項1の発明によると、農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させるから、前記受け皿の前記段差部と前記高位置コンベヤの前記角部との連係によって、前記受け皿を的確に整列させ、揃えられた搬送姿勢を維持しながら前記受け皿を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0011】
また、前記受け皿が前記一方向回転を停止する際は、前記受け皿のうち前記高位置コンベヤに乗り上げていた部分だけが落下することになるから、前記受け皿の姿勢揃え時の脱落距離(落差)が前記従来の構成に比べて小さくなる。このため、前記脱落の衝撃を小さくでき、前記姿勢揃え時に前記農産物が前記受け皿から落下するおそれを抑制できるという効果を奏する。
【0012】
請求項2の発明によると、請求項1に記載したコンベヤ装置において、前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送されるから、前記受け皿が前記一方向回転を停止する際は、前記受け皿のうち前記高位置コンベヤに乗り上げていた部分は落下するものの、前記低位置コンベヤに乗り上げていた部分は浮き上がって前記低位置コンベヤから離れる。つまり、前記受け皿の姿勢揃え時の脱落距離(落差)は前記従来の構成に比べて格段に小さくなる。このため、前記脱落の衝撃を大幅に小さくでき、前記姿勢揃え時に前記農産物が前記受け皿から落下するおそれを確実に抑制できるという効果を奏する。
【0013】
請求項3の発明によると、請求項2に記載したコンベヤ装置において、前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されているから、前記受け皿の前記段差部が前記高位置コンベヤの前記角部に被さって嵌ると、前記段差部が前記高位置コンベヤから離れて接触しなくなる。かかる状態の前記受け皿に前記高位置コンベヤの先送り作用が及ぶことはない。従って、前記一方向回転を停止した受け皿を搬送方向下流側に向けてスムーズに搬送できるという効果を奏する。
【0014】
請求項4の発明は、請求項1〜3のうちいずれかに記載したコンベヤ装置において、前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されているから、前記案内部材の存在が、前記受け皿の横回転に起因する曲がり移動(前記コンベヤ装置からの脱落)を防止できる。換言すると、前記案内部材によって、横回転時の前記受け皿の直進性を確実に担保できるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】受け皿の平面図である。
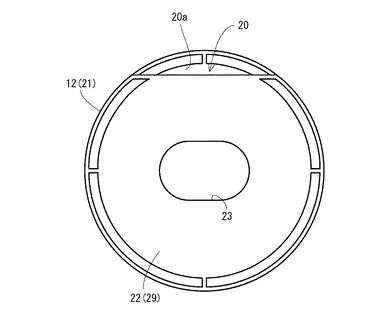
【図2】受け皿の底面図である。
【図3】受け皿を切り欠き部側から見た側面図である。
【図4】受け皿を側周壁側から見た側面図である。
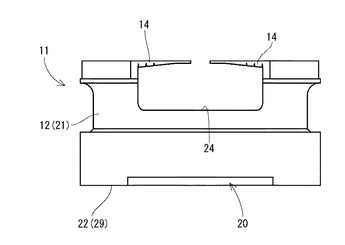
【図5】図1のV−V視側面断面図である。
【図6】整列コンベヤの概略正面図である。
【図7】整列コンベヤの概略平面図である。
【図8】整列コンベヤの要部拡大一部切り欠き平面図である。
【図9】整列コンベヤの動力伝達系統を示す正面断面図である。
【図10】整列コンベヤの動力伝達系統を示す背面断面図である。
【図11】図8のXI−XI視側面断面図である。
【図12】図8のXII−XII視側面断面図である。
【図13】図8のXIII−XIII視側面断面図である。
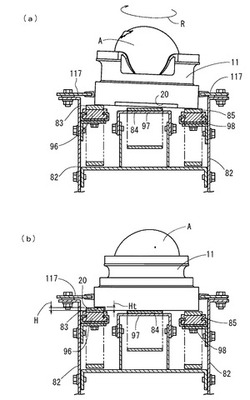
【図14】(a)は一方向回転時の整列コンベヤの側面断面図、(b)は一方向回転停止時の整列コンベヤの側面断面図である。
【図15】選別コンベヤの全体正面図である。
【図16】選別コンベヤの全体平面図である。
【図17】検査部の拡大側面断面図である。
【図18】選果部の拡大側面断面図である。
【発明を実施するための形態】
【0016】
以下に、本願発明を具体化した実施形態を図面に基づいて説明する。なお、本願において「農産物」とは、本願発明に係る受け皿に載置可能なあらゆる果実及び野菜を含む概念であり、例えばキウイ、ミカンといった小型のもの、桃、梨、リンゴ、マンゴー、ゴーヤといった中型のもの、メロン、スイカといった大型のもの等が挙げられる。
【0017】
(1).受け皿の構造
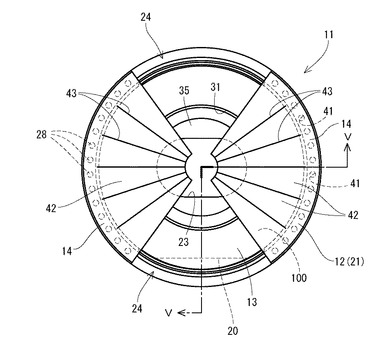
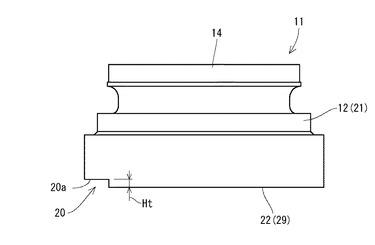
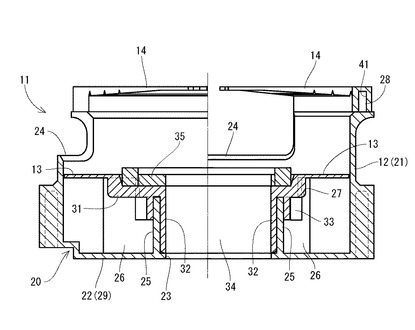
まず、図1〜図5を参照しながら、農産物Aを載せる受け皿11の構造について説明する。図1〜図5に示すように、実施形態の受け皿11は、側周壁21と底壁22とを有して上向きに開口した平面視円形の受け皿本体12と、受け皿本体12の内部側を上下に仕切る中底体13と、受け皿本体12における側周壁21の上縁部に取り付けられた一対の可撓性ヒレ片14とを備えている。
【0018】
受け皿本体12は比較的硬質な合成樹脂材製の射出成形品であり、上向きに開口した円筒状に形成されている。受け皿本体12における底壁22の中央部には、受け皿本体12内に収容される農産物Aの外径より小さい穴径で且つ上下方向に貫通する貫通穴23が形成されている。受け皿本体12の貫通穴23は、マンゴーやゴーヤといった長物農産物の内部品質検査にも対処し得るように、平面視で長径と短径とを有する開口形状に形成されている。実施形態の貫通穴23は平面視長円形状になっている(図1及び図2参照)。なお、貫通穴23の開口形状は平面視楕円形状や平面視矩形状でも差し支えない。平面視多角形状でもよい。要は、長物農産物に対する光の照射又は受光範囲を広く確保できる開口形状になっていれば足りる。
【0019】
図5に示すように、底壁22の上面側のうち貫通穴23の周囲には、貫通穴23を囲う角筒状の支えリブ25が立設されている。支えリブ25における4つのコーナ部と側周壁21の内面側とは、底壁22の中央部(実施形態では貫通穴23)を基準に放射方向に延びる補強リブ26にて連接されている。支えリブ25の上端面と、各補強リブ26における上端面の中央寄り部分とは、各補強リブ26における上端面の外寄り部分よりも一段下がった階段状の凹み天井部27になっている。当該一段下がった凹み天井部27に、中底体13において下向きに突出した環状段部31が嵌め込まれる。受け皿本体12の側周壁21には、貫通穴23の中心線を挟んだ両側に、相対向する一対の切り欠き部24が形成されている。各切り欠き部24の下端側は、受け皿本体12の内部側に配置された状態の中底体13よりも高い位置にあり、これら両切り欠き部24が直列に並ぶ側面視方向から見ても、中底体13が露出しないように設定されている。
【0020】
中底体13も、受け皿本体12と同様に、比較的硬質な合成樹脂材製の射出成形品であり、その直径は受け皿本体12の内径とほぼ同程度に設定されている。中底体13の中央部には、受け皿本体12の凹み天井部27に上方から嵌る環状段部31が下向きに突出形成されている。環状段部31における下面側の中央部分には、受け皿本体12における支えリブ25の内面側に密接して貫通穴23に連通した状態で上下に貫通する角筒ボス部32が一体形成されている。環状段部31の下面側のうち角筒ボス部32より半径外寄りの部分には、支えリブ25の上部外面側に密接する外側リブ33が一体形成されている。角筒ボス部32及び外側リブ33にて支えリブ25を挟むようにして、凹み天井部27に環状段部31を上方から嵌め込むことによって、中底体13が受け皿本体12内に配置される。
【0021】
受け皿本体12の内部側に中底体13を配置した状態では、受け皿本体12の側周壁21と中底体13と支えリブ25と各補強リブ26とによって、受け皿本体12の内部側が平面視扇形の4つの領域に仕切られることになる。これらの領域には、受け皿11の重量バランスをとるためのカウンタウェイト(図示省略)を収容可能である。なお、中底体13における環状段部31の上面側には、角筒ボス部32のボス穴34を囲うクッション体35が配置される。クッション体35は、受け皿11に載置された農産物Aの下部側に傷が付くのを防止するためのものであり、軟質ゴムやスポンジといった弾性を有する素材からなっている。
【0022】
一対の可撓性ヒレ片14は、農産物Aを収まりよく受けるためのものであり、可撓性を有する弾性材(例えばゴムのような軟質な合成樹脂)製で平面視扇形に形成されたものである。各可撓性ヒレ片14の基端側は、受け皿本体12における側周壁21の上縁部に着脱可能に取り付けられている。このため、各可撓性ヒレ片14は、受け皿本体12の中央に向けて延びる片持梁の姿勢で固定される。実施形態では、受け皿本体12における側周壁21の上縁部は、一対の切り欠き部24によって2つに分断されている。図1及び図5に示すように、それぞれの上縁部には、上向きに突出する挿入ピン28が周方向に沿った飛び飛びの間隔で立設されている。各可撓性ヒレ片14の基端側の下面には、各挿入ピン28にそれぞれ対応して嵌る嵌合穴41が形成されている。側周壁21における上縁部の各挿入ピン28に各可撓性ヒレ片14の嵌合穴41を上方から嵌め合わせることによって、各可撓性ヒレ片14が受け皿本体12に対して着脱可能に取り付けられている。
【0023】
図1及び図5に示すように、各可撓性ヒレ片14の先端は、貫通穴23の内面(実施形態では角筒ボス部32におけるボス穴34の内面)より受け皿本体12中央側に位置している。また、各可撓性ヒレ片14は、受け皿本体12の中央を基準に放射方向に延びるスリット43にて複数の切片部42に分割されている。
【0024】
受け皿本体12の外周下部には、円筒の外周角部を切り落として断面逆L字状に凹ませたような形態の段差部20が形成されている。詳細は後述するが、受け皿本体12の段差部20は、高位置コンベヤ83における中央コンベヤ84寄りの角部83aに被せて嵌ることによって搬送姿勢を決めるためのものである。段差部20は、受け皿本体12におけるいずれか一方の切り欠き部24の下方に位置していて、貫通穴23の平面視での長径方向に沿って延びる形状(前記長径方向と平行状に延びる形状)に形成されている。これは、選別コンベヤ50にて搬送される受け皿11上の農産物Aを内部品質検査する際に、両切り欠き部24が直列に並ぶ向きを幅方向一対の透過光センサ74が対峙し合う向きに一致させると共に、貫通穴23の平面視での長径方向を受け皿11の搬送方向に沿わせるためのものである(詳細は後述する)。
【0025】
受け皿11に農産物Aを載置すると、農産物Aの外形形状に倣って一対の可撓性ヒレ片14が下向きに撓み変形し、農産物Aを側方から支持することになる。農産物Aの下部側はクッション体35にて支持される。従って、搬送による農産物Aの横揺れを両可撓性ヒレ片14の弾性復原力にて抑制でき、受け皿11に載置された農産物Aを安定した搬送姿勢に保持できる。特に実施形態では、各可撓性ヒレ片14がスリット43にて複数の切片部42に分割されているから、個々の切片部42を農産物Aの外周に密着させ易い。このため、各可撓性ヒレ片14(各切片部42)との接触面積が広く取れ、受け皿11に載置された農産物Aの姿勢安定性がよい。
【0026】
(2).コンベヤ装置の構造
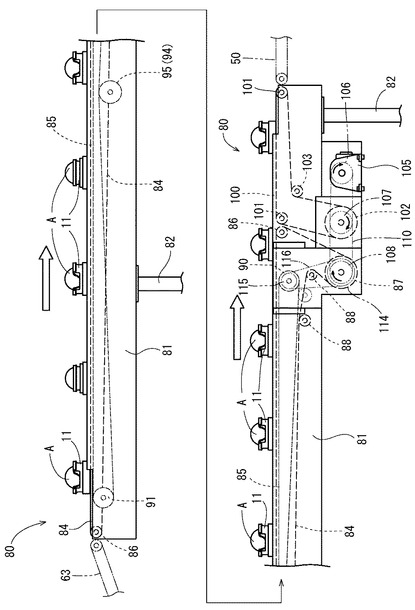
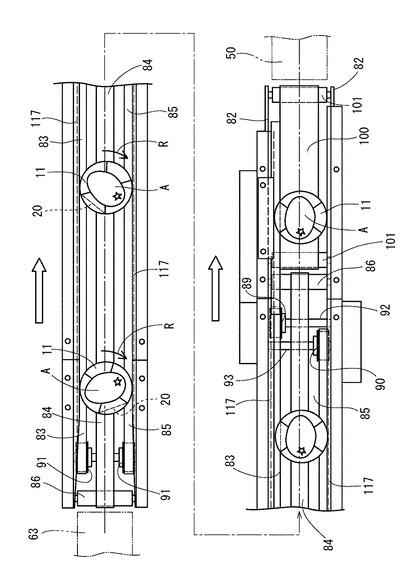
次に、図6〜図18を参照しながら、農産物Aを搬送しながら検査及び選別するコンベヤ装置の構造について説明する。コンベヤ装置は、農産物Aを載せた受け皿11を搬送しながら所定の姿勢に揃える整列コンベヤ80(図6〜図14参照)と、農産物Aを載せた受け皿11を検査し選別する選別コンベヤ50(図15〜図18参照)とを備えている。整列コンベヤ80の搬送方向下流側に、選別コンベヤ50が配置される。整列コンベヤ80の搬送方向上流側には、供給コンベヤ63が配置される。農産物Aを載せた受け皿11を、作業者が供給コンベア63上に直列状に並べて載せ、供給コンベヤ63の駆動にて、受け皿11が整列コンベヤ80に搬送される。実施形態において、各受け皿11に載せられた農産物Aはマンゴー等の長物農産物であり、その長手方向を貫通穴23の長径方向に沿わせた状態で載置される。なお、図示は省略するが、各受け皿11には識別用のIDチップが取り付けられている。
【0027】
コンベヤ装置としての整列コンベヤ80は、4本の脚81にて支持される2本の略平行なコンベヤフレーム82を備えている。両コンベヤフレーム82の間には、受け皿11が跨って載り得るように、ベルト式の3列のコンベヤ83,84,85が並列状に配置されている。これらコンベヤ83〜85群は、中央に位置する中央コンベヤ84と、中央コンベヤ84の幅方向一側(中央コンベヤ84を挟んで一側方)に位置する高位置コンベヤ83と、中央コンベヤ84の幅方向他側(中央コンベヤ84を挟んで他側方)に位置する低位置コンベヤ85とからなっている。
【0028】
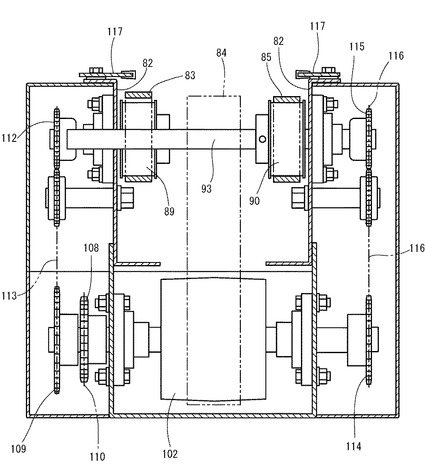
実施形態では、両コンベヤフレーム82の両端部間に、自由回転ローラ86が回転可能に軸支されている。搬送方向下流側の自由回転ローラ86の下方には、中央駆動プーリ87が回転可能に設けられている。中央コンベヤ84は、搬送方向上下一対(前後一対)の自由回転ローラ86と中央駆動プーリ87とに巻き掛けられている。また、搬送方向下流側の自由回転ローラ86と中央駆動プーリ87との間に位置する中央用テンションローラ88によって、中央コンベヤ84に張力が付与されている。
【0029】
両コンベヤフレーム82間には、高位置コンベヤ83や低位置コンベヤ85を掛け回すための駆動ローラ89,90及び従動ローラ91も回転可能に設けられている。搬送方向上流側の自由回転ローラ86の近傍にある各従動ローラ91は搬送方向上下(前後)に固定位置調節可能であり、各コンベヤ83,85に対するテンションローラとして機能している。搬送方向下流側の自由回転ローラ86の近傍にある高位置用駆動ローラ89と低位置用駆動ローラ90とは、搬送方向上下に並ぶ高位置用ローラ軸92と低位置用ローラ軸93とにそれぞれ固着されている。実施形態では、高位置用駆動ローラ89が搬送方向下流側に、低位置用駆動ローラ90が搬送方向上流側に位置している。高位置用駆動ローラ89及び従動ローラ91に高位置コンベヤ83が巻き掛けられ、低位置用駆動ローラ90及び従動ローラ91に低位置コンベヤ85が巻き掛けられている。高位置コンベヤ83には、幅方向一側のコンベヤフレーム82の搬送方向中途部に設けられた高位置用テンションローラ94でも、張力が付与されている。低位置コンベヤ85には、幅方向他側のコンベヤフレーム82の搬送方向中途部に設けられた低位置用テンションローラ95でも張力が付与されている。
【0030】
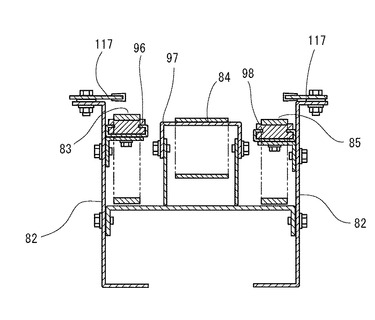
各コンベヤ83〜85の搬送面には高低差を持たせている。すなわち、高位置コンベヤ83の搬送面の高さ位置が最も高く、次に中央コンベヤ84の搬送面の高さ位置が来て、最後に低位置コンベヤ85の搬送面の高さ位置が最も低く設定されている(図12〜図14参照)。実施形態では、各コンベヤ83〜85の送り側の下面が、搬送方向に沿って延びる下ガイド板96〜98にて下方から支持されている。各コンベヤ83〜85に対する当接面の高さ位置に高低差を持たせて各下ガイド板96〜98を配置することによって、高位置コンベヤ83、中央コンベヤ84、低位置コンベヤ85の順に、搬送面の高さ位置が低くなっている。
【0031】
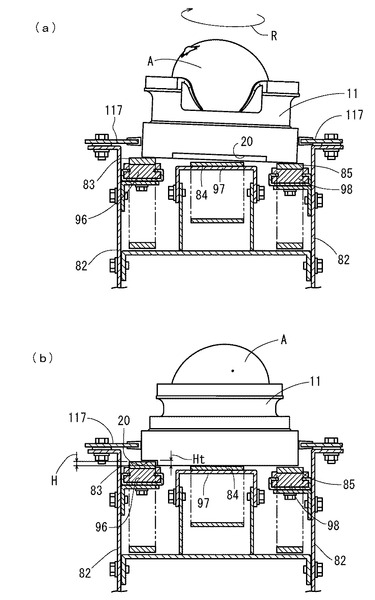
図11及び図14等に示すように、実施形態では、中央コンベヤ84の搬送面から高位置コンベヤ83の搬送面までの高さHよりも、各受け皿11における段差部20の上下凹み高さHtを高くしている。このため、図14(b)に示すように、受け皿11の段差部20を、高位置コンベヤ83における中央コンベヤ84寄りの角部83aに被せて嵌め合わせた状態では、段差部20の横平坦面20aと高位置コンベヤ83の搬送面とが接触しないことになる。また、このような状態では、受け皿11の平底面29が中央コンベヤ84の搬送面にのみ接触し、低位置コンベヤ85の搬送面にも接触しない。
【0032】
なお、図示は省略するが、高位置コンベヤ83の搬送面のうち供給コンベヤ63寄りの送り始端側は、搬送下流側に行くに従って高くなる傾斜案内面になっており、中継コンベヤ100寄りの搬送終端側は、搬送方向下流側に行くに従って低くなる傾斜案内面になっている。高位置コンベヤ83における送り始端側の傾斜案内面によって、供給コンベヤ63から送られてきた受け皿11がスムーズに高位置コンベヤ83に乗り上げできることになる。また、各コンベヤ83〜85の幅方向の寸法は、中央コンベヤ84が最も大きく(幅広であり)、高位置コンベヤ83及び低位置コンベヤ85は、中央コンベヤ84より幅狭だが同程度に設定されている。
【0033】
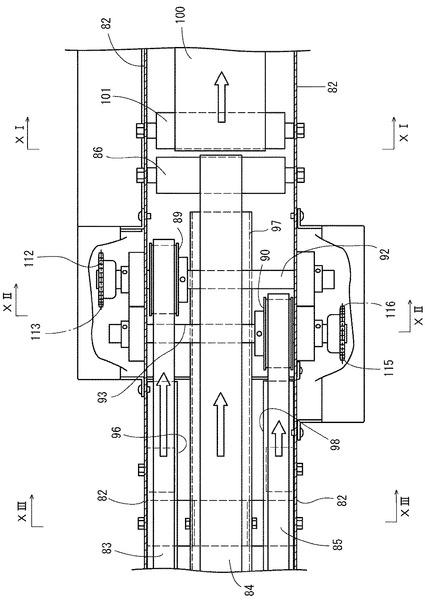
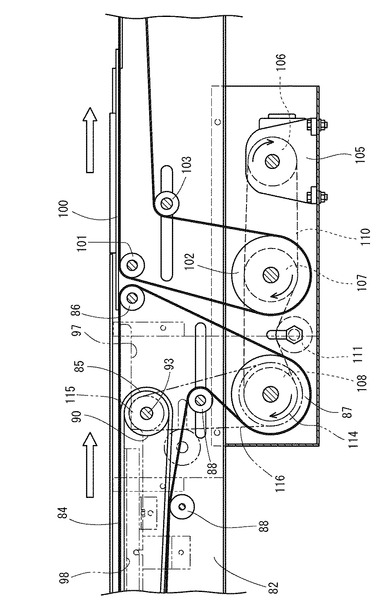
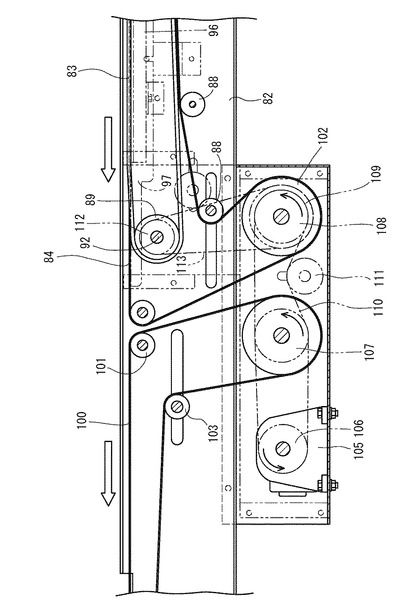
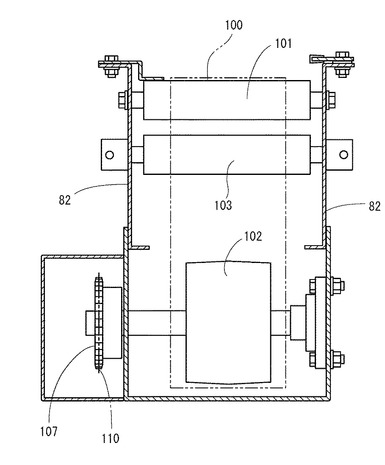
両コンベヤフレーム82間には、コンベヤ83〜85群よりも搬送方向下流側に、中央コンベヤ84より幅広の中継コンベヤ100が配置されている。この場合、両コンベヤフレーム82間のうちコンベヤ83〜85群よりも搬送方向下流側に、前後一対の回転ローラ101が回転可能に軸支されている。搬送方向上流側の回転ローラ101の下方には、中継駆動プーリ102が回転可能に設けられている。中継コンベヤ100は、搬送方向上下一対の回転ローラ101と中継駆動プーリ102とに巻き掛けられている。また、搬送方向下流側の回転ローラ101と中継駆動プーリ102との間に位置する中継用テンションローラ103によって、中継コンベヤ100に張力が付与されている。
【0034】
図6、図9及び図10に示すように、中継コンベヤ100の下方には、駆動源としての整列電動モータ105が配置されている。整列電動モータ105、中継駆動プーリ102及び中央駆動プーリ87は、搬送方向上下に並べて配置されている。整列電動モータ105のモータ軸に駆動スプロケット106が固着されている。中継駆動プーリ102におけるプーリ軸の一端側に中継スプロケット107が固着されている。中央駆動プーリ87におけるプーリ軸の一端側に、二連のスプロケット108,109が固着されている。駆動スプロケット106と、中継スプロケット107と、二連のスプロケット108,109のうち中央駆動プーリ87寄りの従動スプロケット108とに、動力伝達用の伝動チェン110が巻き掛けられている。なお、伝動チェン110は、中継スプロケット107と従動スプロケット108との間に位置するテンションプーリ111によって張力が付与されている(張り具合が調整されている)。
【0035】
二連のスプロケット108,109のうち外側にある高位置用下スプロケット109と、高位置用ローラ軸92の一端側に固着された高位置用上スプロケット112とには、高位置用分岐チェン113が巻き掛けられている。また、中央駆動プーリ87におけるプーリ軸の他端側には、低位置用下スプロケット114が固着されている。低位置用下スプロケット114と、低位置用ローラ軸93の他端側に固着された低位置用上スプロケット115とには、低位置用分岐チェン116が巻き掛けられている。整列電動モータ105からの回転動力は、スプロケット106〜109,112,114,115やチェン110,113,116といった動力伝達系を介して、各コンベヤ83,84,85,100にいずれも同一方向に回転するように伝達される。
【0036】
幅方向に並列状に並ぶ3列のコンベヤ83〜85の駆動速度には、各搬送面の高低差に対応した速度差を持たせている。すなわち、高位置コンベヤ83の駆動速度が最も速く、次に中央コンベヤ84の駆動速度が来て、最後に低位置コンベヤ85の駆動速度が最も遅く設定されている。そして、中継コンベヤ100の駆動速度が、中央コンベヤ84と低位置コンベヤ85との間の速度に設定されている。実施形態では、中央コンベヤ84の駆動速度を基準とすると、高位置コンベヤ83の駆動速度が中央コンベヤ84よりも約8m/minほど速く、低位置コンベヤ85の駆動速度が中央コンベヤ84よりも約10m/minほど遅い。中継コンベヤ100の駆動速度は中央コンベヤ84よりも約3m/minほど遅い。
【0037】
供給コンベヤ63から整列コンベヤ80に受け皿11を搬送する際は、高位置コンベヤ83と低位置コンベヤ85とに受け皿11が跨る。この状態では、受け皿11の平底面29が中央コンベヤ84の搬送面と接触しない(図14(a)参照)。受け皿11のうち駆動速度の速い高位置コンベヤ83側の半部が、駆動速度の遅い低位置コンベヤ85側の半部よりも先に搬送されることになる。このような先送り現象によって、整列コンベヤ80上の受け皿11は、高位置コンベヤ83から低位置コンベヤ84に向かう矢印R方向に横回転することになる。受け皿11の段差部20と高位置コンベヤ83との組合せが、貫通穴23の平面視での長径方向を整列コンベヤ80の搬送方向に沿わせる姿勢規制手段を構成している。従って、高位置コンベヤ83は、受け皿11の姿勢を揃えるための規制ガイド体の一例に相当する。
【0038】
両コンベヤフレーム82の上端側には、受け皿11(受け皿本体12)の側面に当接して受け皿11を搬送方向下流側に案内する案内部材としての案内レール117が、受け皿11の直径よりも若干大きめの間隔を空けて対峙するように設けられている。実施形態における一対の案内レール117は、整列コンベヤ80の搬送方向に沿って長く延びた形態になっている。これら案内レール117の存在が、受け皿11の横回転に起因する曲がり移動(整列コンベヤ80からの脱落)を防止している(受け皿11の直進性を担保している)。従って、高位置コンベヤ83及び低位置コンベヤ85の駆動速度差と、一対の案内レール117のガイド作用とによって、受け皿11は矢印R方向に横回転しながら中継コンベヤ100に向けて搬送されることになる。なお、案内レール117は一対なければならない訳ではなく、少なくとも駆動速度の遅い方のコンベヤ上(実施形態では低位置コンベヤ85上)にあれば足りる。
【0039】
受け皿11が矢印R方向への横回転をし続けて、高位置コンベヤ83の角部83aに段差部20が到達すると、高位置コンベヤ83に乗り上げていた受け皿11の平底面29が高位置コンベヤ83から落下して、中央コンベヤ84の搬送面に密着し支持される(図14(a)参照)。この状態では、受け皿11の段差部20と高位置コンベヤ83の角部83aとが上下方向でほぼ重なり合い、段差部20が角部83aに被さって嵌る。換言すると、受け皿11は中央コンベヤ84の搬送面にのみ接触し、高位置コンベヤ83及び低位置コンベヤ85の両搬送面に非接触になり、受け皿11の矢印R方向への横回転が停止する(図14(b)参照)。その結果、受け皿11が段差部20を高位置コンベヤ83の角部83aに被せて嵌めた姿勢に揃えられ、中央コンベヤ84から中継コンベヤ100、ひいては選別コンベヤ50に受け継がれる。選別コンベヤ50に受け継ぎ搬送される各受け皿11においては、両切り欠き部24の並び向きが透過光センサ74の対峙し合う向きに一致すると共に、貫通穴23の長径方向が受け皿11の搬送方向に沿うことになる。このため、受け皿11は整列コンベヤ80上で的確に整列させられるのである。
【0040】
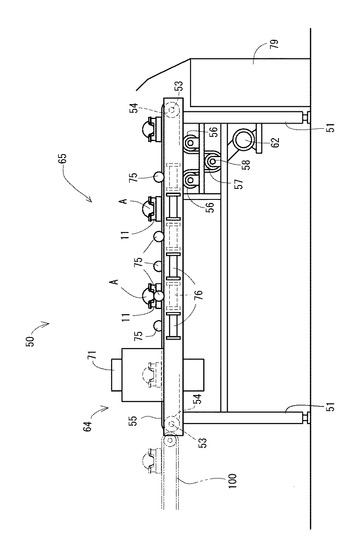
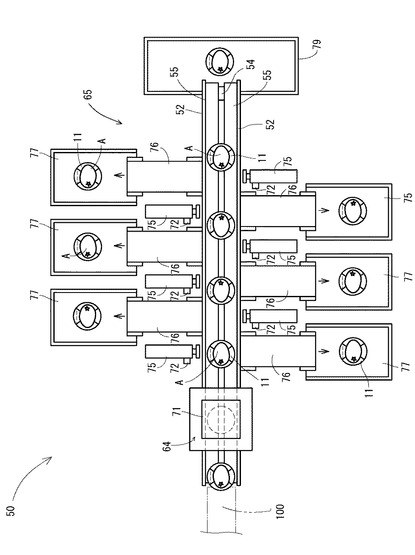
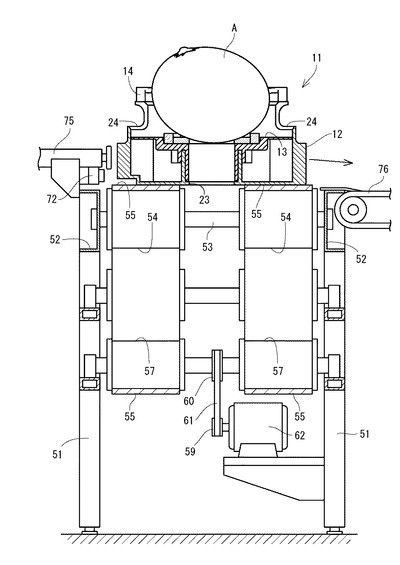
さて、農産物Aを載せた受け皿11を検査し選別する選別コンベヤ50は、4本の脚51にて支持される2本の略平行なコンベヤフレーム52を備えている(図15参照)。両コンベヤフレーム52の両端部間に、軸53を介して遊転ローラ54が回転自在に設けられている。両コンベヤフレーム52の間に、遊転ローラ54を介して2本の略平行なコンベヤベルト55が張設されている。コンベヤベルト55は、2つのテンションローラ56と駆動ローラ57とに掛け回されている。駆動ローラ57の軸58に、プーリ59,60及びベルト61を介して電動モータ62を連結させ、電動モータ62にて2本の略平行なコンベヤベルト55が同期して同一方向に回転する。選別コンベヤ50側の電動モータ62と整列コンベヤ80側の整列電動モータ105とは互いに同期して駆動する。なお、2本の略平行なコンベヤベルト55の設置間隔は、受け皿11における貫通穴23の短径方向よりも若干大きく設定されている。
【0041】
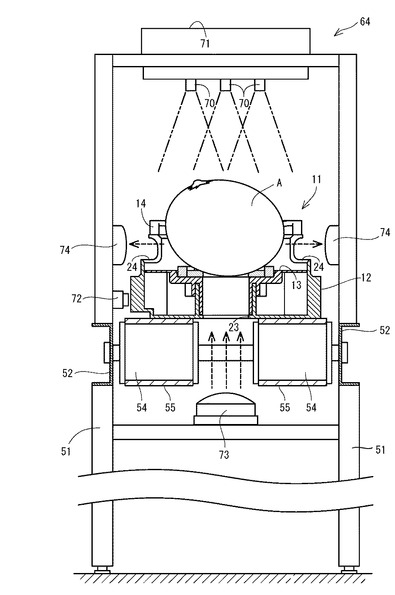
両コンベヤベルト55の送り始端側に検査部64が設けられている。検査部64は、農産物Aの大きさを計測するサイズ計測手段と、農産物Aの内部品質を検査する内部品質検査手段と、各受け皿11のIDチップを認識する認識センサ72とを備える。農産物Aの大きさを計測するサイズ計測手段として、先端にレンズを有する複数本の光ファイバ20付きの撮像カメラ21を備える。農産物Aの内部品質を検査する内部品質検査手段として、農産物Aに測定光を照射するライト73と、該ライト73から農産物Aに照射した測定光のうち農産物Aを透過した透過光(検出光)を検出する透過光センサ74とを備える。そして、撮像カメラ71の撮像データと、透過光センサ74の透過光の検出データとに基づき、各農産物Aの内部品質を判定するように構成されている。実施形態の内部品質検査手段は、両コンベヤベルト55間の下方側に配置されたライト73と、両コンベヤベルト55を挟んで幅方向両側に配置された透過光センサ74とからなる下部照射・側部受光タイプのものである。
【0042】
更に、両コンベヤベルト55のうち検査部64よりも送り下流側に、選果部65を備えている。図18に示すように、選果部65は、所定の内部品質の農産物Aを認識して取り出す認識センサ72、選果シリンダ75、選果コンベヤ76及び選果台77の組合せを複数組備えている。選別コンベヤ50の送り終端部には、内部品質の選別範囲のいずれにも属さない不適切な検出が行われた農産物Aの受け皿11を投入するエラー回収ボックス79が設けられている。
【0043】
検査部64にて内部品質検査をする場合は、両コンベヤベルト55間の下方側に配置されたライト73から、受け皿11の貫通穴23を介して農産物Aの下面部に測定光を照射する。農産物Aの下面部に照射された測定光は農産物Aの内部で散乱し、農産物Aの露出部分から出た透過光が、受け皿11における一対の切り欠き部24を介して、両コンベヤベルト55を挟んで幅方向両側に配置された透過光センサ74にて検出される。なお、受け皿11上から農産物Aを取り出す際は、受け皿本体12の切り欠き部24に指を入れて農産物Aを引き上げればよいから、農産物Aの大きさに影響されることなく、受け皿11内から農産物Aを簡単に取り出せる。
【0044】
(3).まとめ
上記の記載並びに図6〜図14から明らかなように、農産物Aを載せた受け皿11を搬送しながら所定の姿勢に揃えるコンベヤ装置80であって、前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85を備えており、前記コンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなっており、前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿11を前記両コンベヤ83,85に跨らせて搬送することによって、前記受け皿11を一方向に回転させ、前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させるから、前記受け皿11の前記段差部20と前記高位置コンベヤ83の前記角部83aとの連係によって、前記受け皿11を的確に整列させ、揃えられた搬送姿勢を維持しながら前記受け皿11を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0045】
また、前記受け皿11が前記一方向回転を停止する際は、前記受け皿11のうち前記高位置コンベヤ83に乗り上げていた部分だけが落下することになるから、前記受け皿11の姿勢揃え時の脱落距離(落差)が前記従来の構成に比べて小さくなる。このため、前記脱落の衝撃を小さくでき、前記姿勢揃え時に前記農産物Aが前記受け皿11から落下するおそれを抑制できるという効果を奏する。
【0046】
上記の記載並びに図6〜図14から明らかなように、前記両コンベヤ83,85の間に中央コンベヤ84が配置されており、前記中央コンベヤ84の搬送面の高さ位置は、前記高位置コンベヤ83の搬送面よりも低く且つ前記低位置コンベヤ85の搬送面よりも高く設定されており、前記中央コンベヤ84の駆動速度は、前記高位置コンベヤ83よりも遅く且つ前記低位置コンベヤ85よりも速く設定されており、前記一方向回転中の受け皿11は前記中央コンベヤ84と非接触である一方、前記一方向回転を停止した受け皿11が前記中央コンベヤ84にて搬送されるから、前記受け皿11が前記一方向回転を停止する際は、前記受け皿11のうち前記高位置コンベヤ83に乗り上げていた部分は落下するものの、前記低位置コンベヤ85に乗り上げていた部分は浮き上がって前記低位置コンベヤ85から離れる。つまり、前記受け皿11の姿勢揃え時の脱落距離(落差)は前記従来の構成に比べて格段に小さくなる。このため、前記脱落の衝撃を大幅に小さくでき、前記姿勢揃え時に前記農産物Aが前記受け皿11から落下するおそれを確実に抑制できるという効果を奏する。
【0047】
上記の記載並びに図14(a)(b)から明らかなように、前記段差部20の上下凹み高さHtが、前記中央コンベヤ84の前記搬送面から前記高位置コンベヤ83の前記搬送面までの高さHよりも高く設定されているから、前記受け皿11の前記段差部20が前記高位置コンベヤ83の前記角部83aに被さって嵌ると、前記段差部20が前記高位置コンベヤ83から離れて接触しなくなる。かかる状態の前記受け皿11に前記高位置コンベヤ83の先送り作用が及ぶことはない。従って、前記一方向回転を停止した受け皿11を搬送方向下流側に向けてスムーズに搬送できるという効果を奏する。
【0048】
上記の記載並びに図6〜図14から明らかなように、前記高位置コンベヤ83及び前記低位置コンベヤ85のうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿11を搬送方向下流側に案内する案内部材117が配置されているから、前記案内部材117の存在が、前記受け皿11の横回転に起因する曲がり移動(前記コンベヤ装置80からの脱落)を防止できる。換言すると、前記案内部材117によって、横回転時の前記受け皿11の直進性を確実に担保できるという効果を奏する。
【0049】
上記の記載並びに図1〜図18から明らかなように、長物農産物Aを載せた受け皿11を搬送するコンベヤ装置50,80の搬送方向中途部に、前記長物農産物Aに測定光を照射する投光部73と、前記長物農産物Aからの検出光を検出する受光部74とを備えており、前記投光部73又は前記受光部74が前記コンベヤ装置50,80の下方側に配置されており、前記受光部74の検出結果に基づき前記長物農産物Aの内部品質を検査する品質検査装置であって、前記受け皿11には上下に貫通した貫通穴23が形成されており、前記貫通穴23は平面視で長径と短径とを有する開口形状になっているから、前記長物農産物Aの形状に対して前記投光部73の照射範囲又は前記受光部74の受光範囲を広く確保できる。このため、前記長物農産物Aにおける先端側や基端側の内部品質を検査することが可能になり、前記長物農産物Aに対する内部品質検査精度を格段に向上できるという効果を奏する。
【0050】
その上、前記コンベヤ装置50,80のうち前記投光部73及び前記受光部74よりも搬送方向上流側において、前記貫通穴23の平面視での長径方向を前記コンベヤ装置50,80の搬送方向に沿わせる姿勢規制手段20,83を備えているから、前記コンベヤ装置50,80の幅方向を拡大せずに、前記投光部73及び前記受光部74を配置でき、前記コンベヤ装置50,80全体をコンパクトに構成できるという効果を奏する。
【0051】
上記の記載並びに図6〜図14から明らかなように、前記受け皿11の外周下部には、前記貫通穴23の平面視での長径方向に沿って延びる段差部20が形成されている一方、前記コンベヤ装置50,80のうち前記投光部73及び前記受光部74よりも搬送方向上流側には、前記受け皿11の前記段差部20が被さって嵌る規制ガイド体83が、前記コンベヤ装置50,80の搬送方向に沿って延びるように配置されており、前記受け皿11の前記段差部20と前記規制ガイド体83とによって、前記姿勢規制手段が構成されているから、前記受け皿11の前記段差部20と前記規制ガイド体83とによって、前記受け皿11の搬送姿勢を的確に揃え、これを維持しながら、前記受け皿11を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0052】
本願発明は、前述の実施形態に限定するものではなく、様々な態様に具体化できる。例えば前述の実施形態では、投光部73から農産物Aに光を照射し、農産物Aを透過した透過光を受光部74で検出する構成を採用しているが、これに限らず、農産物Aを反射した反射光を受光部74で検出する構成を採用してもよい。この場合、反射光を受光可能な位置に受光部74を配置することになる。反射光を検出する構成であっても、前述の実施形態と同様の作用効果が得られるのは言うまでもない。従って、検出光とは、透過光と反射光との両方を含む概念である。
【0053】
また、前述の実施形態では、下部照射・側部受光タイプの内部品質検査手段を採用したが、側部照射・下部受光タイプでもよいし、上部照射・下部受光タイプ、又は下部照射・上部受光タイプであっても差し支えない。更に、本願発明における各部の構成は図示の実施形態に限られるものではなく、本願発明の趣旨を逸脱しない範囲で種々変更が可能である。
【符号の説明】
【0054】
11 受け皿
20 段差部
23 貫通穴
50 選別コンベヤ
73 ライト
74 透過光センサ
80 整列コンベヤ
83 高位置コンベヤ
83a 角部
84 中央コンベヤ
85 低位置コンベヤ
117 案内レール
【技術分野】
【0001】
本願発明は、例えばマンゴー、ゴーヤ、桃、梨、柑橘類、リンゴ、メロンといった農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置に関するものである。
【背景技術】
【0002】
従来から、農産物を搬送するコンベヤ装置に用いられる受け皿としては、目的に応じた様々な形態のものが提案されている。例えばフリートレイ式の受け皿は、搬送、分岐、集積といった動作をし易いように平面視円形の形態になっている。しかし、この種の受け皿は、動作の自由度が大きい反面、例えば受け皿に載置された農産物の検査のために、受け皿を所定の姿勢に揃える(受け皿の向きを一定に揃える)のが難しい。この点を解消する装置としては、例えば特許文献1に開示されたコンベヤ装置がある。
【0003】
特許文献1のコンベヤ装置では、左右一対の第1コンベヤの間に、これら両第1コンベヤより一段低い第2コンベヤを配置し、左右の第1コンベヤの駆動速度に速度差を持たせて受け皿を水平回転させる。受け皿の底部には左右一対の凹み部が形成されている。凹み部がそれぞれ左右の第1コンベヤに重なるまで受け皿を水平回転させて、左右両第1コンベヤの上面からその間の第2コンベヤの上面に、受け皿全体を脱落させる。その結果、向きが揃った状態の受け皿が第2コンベヤにて搬送される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−290797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、前記特許文献1のコンベヤ装置では、受け皿の向きを揃えるのに、左右両第1コンベヤの上面から第2コンベヤの上面に受け皿全体を脱落させるため、左右両第1コンベヤの上面から第2コンベヤの上面までの落差(高低差)によっては、脱落の衝撃で農産物が受け皿から落下する可能性を否定できないのであった。本願発明は、前記先願の考え方を更に止揚・発展させ、より改善されたコンベヤ装置を提供することを技術的課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明は、農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させるというものである。
【0007】
請求項2の発明は、請求項1に記載したコンベヤ装置において、前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送されるというものである。
【0008】
請求項3の発明は、請求項2に記載したコンベヤ装置において、前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されているというものである。
【0009】
請求項4の発明は、請求項1〜3のうちいずれかに記載したコンベヤ装置において、前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されているというものである。
【発明の効果】
【0010】
請求項1の発明によると、農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させるから、前記受け皿の前記段差部と前記高位置コンベヤの前記角部との連係によって、前記受け皿を的確に整列させ、揃えられた搬送姿勢を維持しながら前記受け皿を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0011】
また、前記受け皿が前記一方向回転を停止する際は、前記受け皿のうち前記高位置コンベヤに乗り上げていた部分だけが落下することになるから、前記受け皿の姿勢揃え時の脱落距離(落差)が前記従来の構成に比べて小さくなる。このため、前記脱落の衝撃を小さくでき、前記姿勢揃え時に前記農産物が前記受け皿から落下するおそれを抑制できるという効果を奏する。
【0012】
請求項2の発明によると、請求項1に記載したコンベヤ装置において、前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送されるから、前記受け皿が前記一方向回転を停止する際は、前記受け皿のうち前記高位置コンベヤに乗り上げていた部分は落下するものの、前記低位置コンベヤに乗り上げていた部分は浮き上がって前記低位置コンベヤから離れる。つまり、前記受け皿の姿勢揃え時の脱落距離(落差)は前記従来の構成に比べて格段に小さくなる。このため、前記脱落の衝撃を大幅に小さくでき、前記姿勢揃え時に前記農産物が前記受け皿から落下するおそれを確実に抑制できるという効果を奏する。
【0013】
請求項3の発明によると、請求項2に記載したコンベヤ装置において、前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されているから、前記受け皿の前記段差部が前記高位置コンベヤの前記角部に被さって嵌ると、前記段差部が前記高位置コンベヤから離れて接触しなくなる。かかる状態の前記受け皿に前記高位置コンベヤの先送り作用が及ぶことはない。従って、前記一方向回転を停止した受け皿を搬送方向下流側に向けてスムーズに搬送できるという効果を奏する。
【0014】
請求項4の発明は、請求項1〜3のうちいずれかに記載したコンベヤ装置において、前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されているから、前記案内部材の存在が、前記受け皿の横回転に起因する曲がり移動(前記コンベヤ装置からの脱落)を防止できる。換言すると、前記案内部材によって、横回転時の前記受け皿の直進性を確実に担保できるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】受け皿の平面図である。
【図2】受け皿の底面図である。
【図3】受け皿を切り欠き部側から見た側面図である。
【図4】受け皿を側周壁側から見た側面図である。
【図5】図1のV−V視側面断面図である。
【図6】整列コンベヤの概略正面図である。
【図7】整列コンベヤの概略平面図である。
【図8】整列コンベヤの要部拡大一部切り欠き平面図である。
【図9】整列コンベヤの動力伝達系統を示す正面断面図である。
【図10】整列コンベヤの動力伝達系統を示す背面断面図である。
【図11】図8のXI−XI視側面断面図である。
【図12】図8のXII−XII視側面断面図である。
【図13】図8のXIII−XIII視側面断面図である。
【図14】(a)は一方向回転時の整列コンベヤの側面断面図、(b)は一方向回転停止時の整列コンベヤの側面断面図である。
【図15】選別コンベヤの全体正面図である。
【図16】選別コンベヤの全体平面図である。
【図17】検査部の拡大側面断面図である。
【図18】選果部の拡大側面断面図である。
【発明を実施するための形態】
【0016】
以下に、本願発明を具体化した実施形態を図面に基づいて説明する。なお、本願において「農産物」とは、本願発明に係る受け皿に載置可能なあらゆる果実及び野菜を含む概念であり、例えばキウイ、ミカンといった小型のもの、桃、梨、リンゴ、マンゴー、ゴーヤといった中型のもの、メロン、スイカといった大型のもの等が挙げられる。
【0017】
(1).受け皿の構造
まず、図1〜図5を参照しながら、農産物Aを載せる受け皿11の構造について説明する。図1〜図5に示すように、実施形態の受け皿11は、側周壁21と底壁22とを有して上向きに開口した平面視円形の受け皿本体12と、受け皿本体12の内部側を上下に仕切る中底体13と、受け皿本体12における側周壁21の上縁部に取り付けられた一対の可撓性ヒレ片14とを備えている。
【0018】
受け皿本体12は比較的硬質な合成樹脂材製の射出成形品であり、上向きに開口した円筒状に形成されている。受け皿本体12における底壁22の中央部には、受け皿本体12内に収容される農産物Aの外径より小さい穴径で且つ上下方向に貫通する貫通穴23が形成されている。受け皿本体12の貫通穴23は、マンゴーやゴーヤといった長物農産物の内部品質検査にも対処し得るように、平面視で長径と短径とを有する開口形状に形成されている。実施形態の貫通穴23は平面視長円形状になっている(図1及び図2参照)。なお、貫通穴23の開口形状は平面視楕円形状や平面視矩形状でも差し支えない。平面視多角形状でもよい。要は、長物農産物に対する光の照射又は受光範囲を広く確保できる開口形状になっていれば足りる。
【0019】
図5に示すように、底壁22の上面側のうち貫通穴23の周囲には、貫通穴23を囲う角筒状の支えリブ25が立設されている。支えリブ25における4つのコーナ部と側周壁21の内面側とは、底壁22の中央部(実施形態では貫通穴23)を基準に放射方向に延びる補強リブ26にて連接されている。支えリブ25の上端面と、各補強リブ26における上端面の中央寄り部分とは、各補強リブ26における上端面の外寄り部分よりも一段下がった階段状の凹み天井部27になっている。当該一段下がった凹み天井部27に、中底体13において下向きに突出した環状段部31が嵌め込まれる。受け皿本体12の側周壁21には、貫通穴23の中心線を挟んだ両側に、相対向する一対の切り欠き部24が形成されている。各切り欠き部24の下端側は、受け皿本体12の内部側に配置された状態の中底体13よりも高い位置にあり、これら両切り欠き部24が直列に並ぶ側面視方向から見ても、中底体13が露出しないように設定されている。
【0020】
中底体13も、受け皿本体12と同様に、比較的硬質な合成樹脂材製の射出成形品であり、その直径は受け皿本体12の内径とほぼ同程度に設定されている。中底体13の中央部には、受け皿本体12の凹み天井部27に上方から嵌る環状段部31が下向きに突出形成されている。環状段部31における下面側の中央部分には、受け皿本体12における支えリブ25の内面側に密接して貫通穴23に連通した状態で上下に貫通する角筒ボス部32が一体形成されている。環状段部31の下面側のうち角筒ボス部32より半径外寄りの部分には、支えリブ25の上部外面側に密接する外側リブ33が一体形成されている。角筒ボス部32及び外側リブ33にて支えリブ25を挟むようにして、凹み天井部27に環状段部31を上方から嵌め込むことによって、中底体13が受け皿本体12内に配置される。
【0021】
受け皿本体12の内部側に中底体13を配置した状態では、受け皿本体12の側周壁21と中底体13と支えリブ25と各補強リブ26とによって、受け皿本体12の内部側が平面視扇形の4つの領域に仕切られることになる。これらの領域には、受け皿11の重量バランスをとるためのカウンタウェイト(図示省略)を収容可能である。なお、中底体13における環状段部31の上面側には、角筒ボス部32のボス穴34を囲うクッション体35が配置される。クッション体35は、受け皿11に載置された農産物Aの下部側に傷が付くのを防止するためのものであり、軟質ゴムやスポンジといった弾性を有する素材からなっている。
【0022】
一対の可撓性ヒレ片14は、農産物Aを収まりよく受けるためのものであり、可撓性を有する弾性材(例えばゴムのような軟質な合成樹脂)製で平面視扇形に形成されたものである。各可撓性ヒレ片14の基端側は、受け皿本体12における側周壁21の上縁部に着脱可能に取り付けられている。このため、各可撓性ヒレ片14は、受け皿本体12の中央に向けて延びる片持梁の姿勢で固定される。実施形態では、受け皿本体12における側周壁21の上縁部は、一対の切り欠き部24によって2つに分断されている。図1及び図5に示すように、それぞれの上縁部には、上向きに突出する挿入ピン28が周方向に沿った飛び飛びの間隔で立設されている。各可撓性ヒレ片14の基端側の下面には、各挿入ピン28にそれぞれ対応して嵌る嵌合穴41が形成されている。側周壁21における上縁部の各挿入ピン28に各可撓性ヒレ片14の嵌合穴41を上方から嵌め合わせることによって、各可撓性ヒレ片14が受け皿本体12に対して着脱可能に取り付けられている。
【0023】
図1及び図5に示すように、各可撓性ヒレ片14の先端は、貫通穴23の内面(実施形態では角筒ボス部32におけるボス穴34の内面)より受け皿本体12中央側に位置している。また、各可撓性ヒレ片14は、受け皿本体12の中央を基準に放射方向に延びるスリット43にて複数の切片部42に分割されている。
【0024】
受け皿本体12の外周下部には、円筒の外周角部を切り落として断面逆L字状に凹ませたような形態の段差部20が形成されている。詳細は後述するが、受け皿本体12の段差部20は、高位置コンベヤ83における中央コンベヤ84寄りの角部83aに被せて嵌ることによって搬送姿勢を決めるためのものである。段差部20は、受け皿本体12におけるいずれか一方の切り欠き部24の下方に位置していて、貫通穴23の平面視での長径方向に沿って延びる形状(前記長径方向と平行状に延びる形状)に形成されている。これは、選別コンベヤ50にて搬送される受け皿11上の農産物Aを内部品質検査する際に、両切り欠き部24が直列に並ぶ向きを幅方向一対の透過光センサ74が対峙し合う向きに一致させると共に、貫通穴23の平面視での長径方向を受け皿11の搬送方向に沿わせるためのものである(詳細は後述する)。
【0025】
受け皿11に農産物Aを載置すると、農産物Aの外形形状に倣って一対の可撓性ヒレ片14が下向きに撓み変形し、農産物Aを側方から支持することになる。農産物Aの下部側はクッション体35にて支持される。従って、搬送による農産物Aの横揺れを両可撓性ヒレ片14の弾性復原力にて抑制でき、受け皿11に載置された農産物Aを安定した搬送姿勢に保持できる。特に実施形態では、各可撓性ヒレ片14がスリット43にて複数の切片部42に分割されているから、個々の切片部42を農産物Aの外周に密着させ易い。このため、各可撓性ヒレ片14(各切片部42)との接触面積が広く取れ、受け皿11に載置された農産物Aの姿勢安定性がよい。
【0026】
(2).コンベヤ装置の構造
次に、図6〜図18を参照しながら、農産物Aを搬送しながら検査及び選別するコンベヤ装置の構造について説明する。コンベヤ装置は、農産物Aを載せた受け皿11を搬送しながら所定の姿勢に揃える整列コンベヤ80(図6〜図14参照)と、農産物Aを載せた受け皿11を検査し選別する選別コンベヤ50(図15〜図18参照)とを備えている。整列コンベヤ80の搬送方向下流側に、選別コンベヤ50が配置される。整列コンベヤ80の搬送方向上流側には、供給コンベヤ63が配置される。農産物Aを載せた受け皿11を、作業者が供給コンベア63上に直列状に並べて載せ、供給コンベヤ63の駆動にて、受け皿11が整列コンベヤ80に搬送される。実施形態において、各受け皿11に載せられた農産物Aはマンゴー等の長物農産物であり、その長手方向を貫通穴23の長径方向に沿わせた状態で載置される。なお、図示は省略するが、各受け皿11には識別用のIDチップが取り付けられている。
【0027】
コンベヤ装置としての整列コンベヤ80は、4本の脚81にて支持される2本の略平行なコンベヤフレーム82を備えている。両コンベヤフレーム82の間には、受け皿11が跨って載り得るように、ベルト式の3列のコンベヤ83,84,85が並列状に配置されている。これらコンベヤ83〜85群は、中央に位置する中央コンベヤ84と、中央コンベヤ84の幅方向一側(中央コンベヤ84を挟んで一側方)に位置する高位置コンベヤ83と、中央コンベヤ84の幅方向他側(中央コンベヤ84を挟んで他側方)に位置する低位置コンベヤ85とからなっている。
【0028】
実施形態では、両コンベヤフレーム82の両端部間に、自由回転ローラ86が回転可能に軸支されている。搬送方向下流側の自由回転ローラ86の下方には、中央駆動プーリ87が回転可能に設けられている。中央コンベヤ84は、搬送方向上下一対(前後一対)の自由回転ローラ86と中央駆動プーリ87とに巻き掛けられている。また、搬送方向下流側の自由回転ローラ86と中央駆動プーリ87との間に位置する中央用テンションローラ88によって、中央コンベヤ84に張力が付与されている。
【0029】
両コンベヤフレーム82間には、高位置コンベヤ83や低位置コンベヤ85を掛け回すための駆動ローラ89,90及び従動ローラ91も回転可能に設けられている。搬送方向上流側の自由回転ローラ86の近傍にある各従動ローラ91は搬送方向上下(前後)に固定位置調節可能であり、各コンベヤ83,85に対するテンションローラとして機能している。搬送方向下流側の自由回転ローラ86の近傍にある高位置用駆動ローラ89と低位置用駆動ローラ90とは、搬送方向上下に並ぶ高位置用ローラ軸92と低位置用ローラ軸93とにそれぞれ固着されている。実施形態では、高位置用駆動ローラ89が搬送方向下流側に、低位置用駆動ローラ90が搬送方向上流側に位置している。高位置用駆動ローラ89及び従動ローラ91に高位置コンベヤ83が巻き掛けられ、低位置用駆動ローラ90及び従動ローラ91に低位置コンベヤ85が巻き掛けられている。高位置コンベヤ83には、幅方向一側のコンベヤフレーム82の搬送方向中途部に設けられた高位置用テンションローラ94でも、張力が付与されている。低位置コンベヤ85には、幅方向他側のコンベヤフレーム82の搬送方向中途部に設けられた低位置用テンションローラ95でも張力が付与されている。
【0030】
各コンベヤ83〜85の搬送面には高低差を持たせている。すなわち、高位置コンベヤ83の搬送面の高さ位置が最も高く、次に中央コンベヤ84の搬送面の高さ位置が来て、最後に低位置コンベヤ85の搬送面の高さ位置が最も低く設定されている(図12〜図14参照)。実施形態では、各コンベヤ83〜85の送り側の下面が、搬送方向に沿って延びる下ガイド板96〜98にて下方から支持されている。各コンベヤ83〜85に対する当接面の高さ位置に高低差を持たせて各下ガイド板96〜98を配置することによって、高位置コンベヤ83、中央コンベヤ84、低位置コンベヤ85の順に、搬送面の高さ位置が低くなっている。
【0031】
図11及び図14等に示すように、実施形態では、中央コンベヤ84の搬送面から高位置コンベヤ83の搬送面までの高さHよりも、各受け皿11における段差部20の上下凹み高さHtを高くしている。このため、図14(b)に示すように、受け皿11の段差部20を、高位置コンベヤ83における中央コンベヤ84寄りの角部83aに被せて嵌め合わせた状態では、段差部20の横平坦面20aと高位置コンベヤ83の搬送面とが接触しないことになる。また、このような状態では、受け皿11の平底面29が中央コンベヤ84の搬送面にのみ接触し、低位置コンベヤ85の搬送面にも接触しない。
【0032】
なお、図示は省略するが、高位置コンベヤ83の搬送面のうち供給コンベヤ63寄りの送り始端側は、搬送下流側に行くに従って高くなる傾斜案内面になっており、中継コンベヤ100寄りの搬送終端側は、搬送方向下流側に行くに従って低くなる傾斜案内面になっている。高位置コンベヤ83における送り始端側の傾斜案内面によって、供給コンベヤ63から送られてきた受け皿11がスムーズに高位置コンベヤ83に乗り上げできることになる。また、各コンベヤ83〜85の幅方向の寸法は、中央コンベヤ84が最も大きく(幅広であり)、高位置コンベヤ83及び低位置コンベヤ85は、中央コンベヤ84より幅狭だが同程度に設定されている。
【0033】
両コンベヤフレーム82間には、コンベヤ83〜85群よりも搬送方向下流側に、中央コンベヤ84より幅広の中継コンベヤ100が配置されている。この場合、両コンベヤフレーム82間のうちコンベヤ83〜85群よりも搬送方向下流側に、前後一対の回転ローラ101が回転可能に軸支されている。搬送方向上流側の回転ローラ101の下方には、中継駆動プーリ102が回転可能に設けられている。中継コンベヤ100は、搬送方向上下一対の回転ローラ101と中継駆動プーリ102とに巻き掛けられている。また、搬送方向下流側の回転ローラ101と中継駆動プーリ102との間に位置する中継用テンションローラ103によって、中継コンベヤ100に張力が付与されている。
【0034】
図6、図9及び図10に示すように、中継コンベヤ100の下方には、駆動源としての整列電動モータ105が配置されている。整列電動モータ105、中継駆動プーリ102及び中央駆動プーリ87は、搬送方向上下に並べて配置されている。整列電動モータ105のモータ軸に駆動スプロケット106が固着されている。中継駆動プーリ102におけるプーリ軸の一端側に中継スプロケット107が固着されている。中央駆動プーリ87におけるプーリ軸の一端側に、二連のスプロケット108,109が固着されている。駆動スプロケット106と、中継スプロケット107と、二連のスプロケット108,109のうち中央駆動プーリ87寄りの従動スプロケット108とに、動力伝達用の伝動チェン110が巻き掛けられている。なお、伝動チェン110は、中継スプロケット107と従動スプロケット108との間に位置するテンションプーリ111によって張力が付与されている(張り具合が調整されている)。
【0035】
二連のスプロケット108,109のうち外側にある高位置用下スプロケット109と、高位置用ローラ軸92の一端側に固着された高位置用上スプロケット112とには、高位置用分岐チェン113が巻き掛けられている。また、中央駆動プーリ87におけるプーリ軸の他端側には、低位置用下スプロケット114が固着されている。低位置用下スプロケット114と、低位置用ローラ軸93の他端側に固着された低位置用上スプロケット115とには、低位置用分岐チェン116が巻き掛けられている。整列電動モータ105からの回転動力は、スプロケット106〜109,112,114,115やチェン110,113,116といった動力伝達系を介して、各コンベヤ83,84,85,100にいずれも同一方向に回転するように伝達される。
【0036】
幅方向に並列状に並ぶ3列のコンベヤ83〜85の駆動速度には、各搬送面の高低差に対応した速度差を持たせている。すなわち、高位置コンベヤ83の駆動速度が最も速く、次に中央コンベヤ84の駆動速度が来て、最後に低位置コンベヤ85の駆動速度が最も遅く設定されている。そして、中継コンベヤ100の駆動速度が、中央コンベヤ84と低位置コンベヤ85との間の速度に設定されている。実施形態では、中央コンベヤ84の駆動速度を基準とすると、高位置コンベヤ83の駆動速度が中央コンベヤ84よりも約8m/minほど速く、低位置コンベヤ85の駆動速度が中央コンベヤ84よりも約10m/minほど遅い。中継コンベヤ100の駆動速度は中央コンベヤ84よりも約3m/minほど遅い。
【0037】
供給コンベヤ63から整列コンベヤ80に受け皿11を搬送する際は、高位置コンベヤ83と低位置コンベヤ85とに受け皿11が跨る。この状態では、受け皿11の平底面29が中央コンベヤ84の搬送面と接触しない(図14(a)参照)。受け皿11のうち駆動速度の速い高位置コンベヤ83側の半部が、駆動速度の遅い低位置コンベヤ85側の半部よりも先に搬送されることになる。このような先送り現象によって、整列コンベヤ80上の受け皿11は、高位置コンベヤ83から低位置コンベヤ84に向かう矢印R方向に横回転することになる。受け皿11の段差部20と高位置コンベヤ83との組合せが、貫通穴23の平面視での長径方向を整列コンベヤ80の搬送方向に沿わせる姿勢規制手段を構成している。従って、高位置コンベヤ83は、受け皿11の姿勢を揃えるための規制ガイド体の一例に相当する。
【0038】
両コンベヤフレーム82の上端側には、受け皿11(受け皿本体12)の側面に当接して受け皿11を搬送方向下流側に案内する案内部材としての案内レール117が、受け皿11の直径よりも若干大きめの間隔を空けて対峙するように設けられている。実施形態における一対の案内レール117は、整列コンベヤ80の搬送方向に沿って長く延びた形態になっている。これら案内レール117の存在が、受け皿11の横回転に起因する曲がり移動(整列コンベヤ80からの脱落)を防止している(受け皿11の直進性を担保している)。従って、高位置コンベヤ83及び低位置コンベヤ85の駆動速度差と、一対の案内レール117のガイド作用とによって、受け皿11は矢印R方向に横回転しながら中継コンベヤ100に向けて搬送されることになる。なお、案内レール117は一対なければならない訳ではなく、少なくとも駆動速度の遅い方のコンベヤ上(実施形態では低位置コンベヤ85上)にあれば足りる。
【0039】
受け皿11が矢印R方向への横回転をし続けて、高位置コンベヤ83の角部83aに段差部20が到達すると、高位置コンベヤ83に乗り上げていた受け皿11の平底面29が高位置コンベヤ83から落下して、中央コンベヤ84の搬送面に密着し支持される(図14(a)参照)。この状態では、受け皿11の段差部20と高位置コンベヤ83の角部83aとが上下方向でほぼ重なり合い、段差部20が角部83aに被さって嵌る。換言すると、受け皿11は中央コンベヤ84の搬送面にのみ接触し、高位置コンベヤ83及び低位置コンベヤ85の両搬送面に非接触になり、受け皿11の矢印R方向への横回転が停止する(図14(b)参照)。その結果、受け皿11が段差部20を高位置コンベヤ83の角部83aに被せて嵌めた姿勢に揃えられ、中央コンベヤ84から中継コンベヤ100、ひいては選別コンベヤ50に受け継がれる。選別コンベヤ50に受け継ぎ搬送される各受け皿11においては、両切り欠き部24の並び向きが透過光センサ74の対峙し合う向きに一致すると共に、貫通穴23の長径方向が受け皿11の搬送方向に沿うことになる。このため、受け皿11は整列コンベヤ80上で的確に整列させられるのである。
【0040】
さて、農産物Aを載せた受け皿11を検査し選別する選別コンベヤ50は、4本の脚51にて支持される2本の略平行なコンベヤフレーム52を備えている(図15参照)。両コンベヤフレーム52の両端部間に、軸53を介して遊転ローラ54が回転自在に設けられている。両コンベヤフレーム52の間に、遊転ローラ54を介して2本の略平行なコンベヤベルト55が張設されている。コンベヤベルト55は、2つのテンションローラ56と駆動ローラ57とに掛け回されている。駆動ローラ57の軸58に、プーリ59,60及びベルト61を介して電動モータ62を連結させ、電動モータ62にて2本の略平行なコンベヤベルト55が同期して同一方向に回転する。選別コンベヤ50側の電動モータ62と整列コンベヤ80側の整列電動モータ105とは互いに同期して駆動する。なお、2本の略平行なコンベヤベルト55の設置間隔は、受け皿11における貫通穴23の短径方向よりも若干大きく設定されている。
【0041】
両コンベヤベルト55の送り始端側に検査部64が設けられている。検査部64は、農産物Aの大きさを計測するサイズ計測手段と、農産物Aの内部品質を検査する内部品質検査手段と、各受け皿11のIDチップを認識する認識センサ72とを備える。農産物Aの大きさを計測するサイズ計測手段として、先端にレンズを有する複数本の光ファイバ20付きの撮像カメラ21を備える。農産物Aの内部品質を検査する内部品質検査手段として、農産物Aに測定光を照射するライト73と、該ライト73から農産物Aに照射した測定光のうち農産物Aを透過した透過光(検出光)を検出する透過光センサ74とを備える。そして、撮像カメラ71の撮像データと、透過光センサ74の透過光の検出データとに基づき、各農産物Aの内部品質を判定するように構成されている。実施形態の内部品質検査手段は、両コンベヤベルト55間の下方側に配置されたライト73と、両コンベヤベルト55を挟んで幅方向両側に配置された透過光センサ74とからなる下部照射・側部受光タイプのものである。
【0042】
更に、両コンベヤベルト55のうち検査部64よりも送り下流側に、選果部65を備えている。図18に示すように、選果部65は、所定の内部品質の農産物Aを認識して取り出す認識センサ72、選果シリンダ75、選果コンベヤ76及び選果台77の組合せを複数組備えている。選別コンベヤ50の送り終端部には、内部品質の選別範囲のいずれにも属さない不適切な検出が行われた農産物Aの受け皿11を投入するエラー回収ボックス79が設けられている。
【0043】
検査部64にて内部品質検査をする場合は、両コンベヤベルト55間の下方側に配置されたライト73から、受け皿11の貫通穴23を介して農産物Aの下面部に測定光を照射する。農産物Aの下面部に照射された測定光は農産物Aの内部で散乱し、農産物Aの露出部分から出た透過光が、受け皿11における一対の切り欠き部24を介して、両コンベヤベルト55を挟んで幅方向両側に配置された透過光センサ74にて検出される。なお、受け皿11上から農産物Aを取り出す際は、受け皿本体12の切り欠き部24に指を入れて農産物Aを引き上げればよいから、農産物Aの大きさに影響されることなく、受け皿11内から農産物Aを簡単に取り出せる。
【0044】
(3).まとめ
上記の記載並びに図6〜図14から明らかなように、農産物Aを載せた受け皿11を搬送しながら所定の姿勢に揃えるコンベヤ装置80であって、前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85を備えており、前記コンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなっており、前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、前記受け皿11を前記両コンベヤ83,85に跨らせて搬送することによって、前記受け皿11を一方向に回転させ、前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させるから、前記受け皿11の前記段差部20と前記高位置コンベヤ83の前記角部83aとの連係によって、前記受け皿11を的確に整列させ、揃えられた搬送姿勢を維持しながら前記受け皿11を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0045】
また、前記受け皿11が前記一方向回転を停止する際は、前記受け皿11のうち前記高位置コンベヤ83に乗り上げていた部分だけが落下することになるから、前記受け皿11の姿勢揃え時の脱落距離(落差)が前記従来の構成に比べて小さくなる。このため、前記脱落の衝撃を小さくでき、前記姿勢揃え時に前記農産物Aが前記受け皿11から落下するおそれを抑制できるという効果を奏する。
【0046】
上記の記載並びに図6〜図14から明らかなように、前記両コンベヤ83,85の間に中央コンベヤ84が配置されており、前記中央コンベヤ84の搬送面の高さ位置は、前記高位置コンベヤ83の搬送面よりも低く且つ前記低位置コンベヤ85の搬送面よりも高く設定されており、前記中央コンベヤ84の駆動速度は、前記高位置コンベヤ83よりも遅く且つ前記低位置コンベヤ85よりも速く設定されており、前記一方向回転中の受け皿11は前記中央コンベヤ84と非接触である一方、前記一方向回転を停止した受け皿11が前記中央コンベヤ84にて搬送されるから、前記受け皿11が前記一方向回転を停止する際は、前記受け皿11のうち前記高位置コンベヤ83に乗り上げていた部分は落下するものの、前記低位置コンベヤ85に乗り上げていた部分は浮き上がって前記低位置コンベヤ85から離れる。つまり、前記受け皿11の姿勢揃え時の脱落距離(落差)は前記従来の構成に比べて格段に小さくなる。このため、前記脱落の衝撃を大幅に小さくでき、前記姿勢揃え時に前記農産物Aが前記受け皿11から落下するおそれを確実に抑制できるという効果を奏する。
【0047】
上記の記載並びに図14(a)(b)から明らかなように、前記段差部20の上下凹み高さHtが、前記中央コンベヤ84の前記搬送面から前記高位置コンベヤ83の前記搬送面までの高さHよりも高く設定されているから、前記受け皿11の前記段差部20が前記高位置コンベヤ83の前記角部83aに被さって嵌ると、前記段差部20が前記高位置コンベヤ83から離れて接触しなくなる。かかる状態の前記受け皿11に前記高位置コンベヤ83の先送り作用が及ぶことはない。従って、前記一方向回転を停止した受け皿11を搬送方向下流側に向けてスムーズに搬送できるという効果を奏する。
【0048】
上記の記載並びに図6〜図14から明らかなように、前記高位置コンベヤ83及び前記低位置コンベヤ85のうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿11を搬送方向下流側に案内する案内部材117が配置されているから、前記案内部材117の存在が、前記受け皿11の横回転に起因する曲がり移動(前記コンベヤ装置80からの脱落)を防止できる。換言すると、前記案内部材117によって、横回転時の前記受け皿11の直進性を確実に担保できるという効果を奏する。
【0049】
上記の記載並びに図1〜図18から明らかなように、長物農産物Aを載せた受け皿11を搬送するコンベヤ装置50,80の搬送方向中途部に、前記長物農産物Aに測定光を照射する投光部73と、前記長物農産物Aからの検出光を検出する受光部74とを備えており、前記投光部73又は前記受光部74が前記コンベヤ装置50,80の下方側に配置されており、前記受光部74の検出結果に基づき前記長物農産物Aの内部品質を検査する品質検査装置であって、前記受け皿11には上下に貫通した貫通穴23が形成されており、前記貫通穴23は平面視で長径と短径とを有する開口形状になっているから、前記長物農産物Aの形状に対して前記投光部73の照射範囲又は前記受光部74の受光範囲を広く確保できる。このため、前記長物農産物Aにおける先端側や基端側の内部品質を検査することが可能になり、前記長物農産物Aに対する内部品質検査精度を格段に向上できるという効果を奏する。
【0050】
その上、前記コンベヤ装置50,80のうち前記投光部73及び前記受光部74よりも搬送方向上流側において、前記貫通穴23の平面視での長径方向を前記コンベヤ装置50,80の搬送方向に沿わせる姿勢規制手段20,83を備えているから、前記コンベヤ装置50,80の幅方向を拡大せずに、前記投光部73及び前記受光部74を配置でき、前記コンベヤ装置50,80全体をコンパクトに構成できるという効果を奏する。
【0051】
上記の記載並びに図6〜図14から明らかなように、前記受け皿11の外周下部には、前記貫通穴23の平面視での長径方向に沿って延びる段差部20が形成されている一方、前記コンベヤ装置50,80のうち前記投光部73及び前記受光部74よりも搬送方向上流側には、前記受け皿11の前記段差部20が被さって嵌る規制ガイド体83が、前記コンベヤ装置50,80の搬送方向に沿って延びるように配置されており、前記受け皿11の前記段差部20と前記規制ガイド体83とによって、前記姿勢規制手段が構成されているから、前記受け皿11の前記段差部20と前記規制ガイド体83とによって、前記受け皿11の搬送姿勢を的確に揃え、これを維持しながら、前記受け皿11を搬送方向下流側にスムーズに搬送できるという効果を奏する。
【0052】
本願発明は、前述の実施形態に限定するものではなく、様々な態様に具体化できる。例えば前述の実施形態では、投光部73から農産物Aに光を照射し、農産物Aを透過した透過光を受光部74で検出する構成を採用しているが、これに限らず、農産物Aを反射した反射光を受光部74で検出する構成を採用してもよい。この場合、反射光を受光可能な位置に受光部74を配置することになる。反射光を検出する構成であっても、前述の実施形態と同様の作用効果が得られるのは言うまでもない。従って、検出光とは、透過光と反射光との両方を含む概念である。
【0053】
また、前述の実施形態では、下部照射・側部受光タイプの内部品質検査手段を採用したが、側部照射・下部受光タイプでもよいし、上部照射・下部受光タイプ、又は下部照射・上部受光タイプであっても差し支えない。更に、本願発明における各部の構成は図示の実施形態に限られるものではなく、本願発明の趣旨を逸脱しない範囲で種々変更が可能である。
【符号の説明】
【0054】
11 受け皿
20 段差部
23 貫通穴
50 選別コンベヤ
73 ライト
74 透過光センサ
80 整列コンベヤ
83 高位置コンベヤ
83a 角部
84 中央コンベヤ
85 低位置コンベヤ
117 案内レール
【特許請求の範囲】
【請求項1】
農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、
前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、
前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させる、
コンベヤ装置。
【請求項2】
前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、
前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送される、
請求項1に記載したコンベヤ装置。
【請求項3】
前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されている、
請求項2に記載したコンベヤ装置。
【請求項4】
前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されている、
請求項1〜3のうちいずれかに記載したコンベヤ装置。
【請求項1】
農産物を載せた受け皿を搬送しながら所定の姿勢に揃えるコンベヤ装置であって、
前記受け皿が跨って載るように並列状に配置された2列のコンベヤを備えており、前記コンベヤ群は、搬送面の高さ位置が高い方である高位置コンベヤと、低い方である低位置コンベヤとからなっており、前記各コンベヤの駆動速度には前記各搬送面の高低差に対応した速度差を持たせており、
前記受け皿を前記両コンベヤに跨らせて搬送することによって、前記受け皿を一方向に回転させ、前記受け皿の外周下部に形成された段差部が前記高位置コンベヤにおける前記低位置コンベヤ寄りの角部に被さって嵌ることによって、前記受け皿の一方向回転を停止させる、
コンベヤ装置。
【請求項2】
前記両コンベヤの間に中央コンベヤが配置されており、前記中央コンベヤの搬送面の高さ位置は、前記高位置コンベヤの搬送面よりも低く且つ前記低位置コンベヤの搬送面よりも高く設定されており、前記中央コンベヤの駆動速度は、前記高位置コンベヤよりも遅く且つ前記低位置コンベヤよりも速く設定されており、
前記一方向回転中の受け皿は前記中央コンベヤと非接触である一方、前記一方向回転を停止した受け皿が前記中央コンベヤにて搬送される、
請求項1に記載したコンベヤ装置。
【請求項3】
前記段差部の上下凹み高さが、前記中央コンベヤの前記搬送面から前記高位置コンベヤの前記搬送面までの高さよりも高く設定されている、
請求項2に記載したコンベヤ装置。
【請求項4】
前記高位置コンベヤ及び前記低位置コンベヤのうち少なくとも駆動速度の遅い方に、前記一方向回転中の受け皿を搬送方向下流側に案内する案内部材が配置されている、
請求項1〜3のうちいずれかに記載したコンベヤ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−126490(P2012−126490A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278419(P2010−278419)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]