
コード情報読取装置及び物品管理システム並びにプログラム
【課題】装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定できるコード情報読取装置を提供する。
【解決手段】CPU11は、イメージスキャナ16のオートフォーカス機能による距離情報、GPS部17による位置情報及び高度情報、地磁気センサ部18による方向情報を取得して、この距離情報、位置情報及び高度情報、方向情報に基づいて、読取対象(例えば、二次元コードや一次元コード)の位置情報を算出すると共に、算出したコード情報の位置情報に基づいて棚情報テーブルM3を検索することにより、該当する「棚アドレス」を棚情報テーブルM3から読み出す。
【解決手段】CPU11は、イメージスキャナ16のオートフォーカス機能による距離情報、GPS部17による位置情報及び高度情報、地磁気センサ部18による方向情報を取得して、この距離情報、位置情報及び高度情報、方向情報に基づいて、読取対象(例えば、二次元コードや一次元コード)の位置情報を算出すると共に、算出したコード情報の位置情報に基づいて棚情報テーブルM3を検索することにより、該当する「棚アドレス」を棚情報テーブルM3から読み出す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品に付されたコード情報を読み取るコード情報読取装置及び物品管理システム並びにプログラムに関する。
【背景技術】
【0002】
一般に、二次元コードや一次元コードなどのコード情報を光学的に読み取るコード読取装置(スキャナ装置)は、CCDやCMOSなどの画像センサー(イメージセンサ)により高解像度撮影した画像データを解析(デコード)することによりコード情報を読み取るようにしている。
ところで、従来では、スキャナ装置にGPS機能(全地球無線測位システム機能)を搭載することにより、バーコードを読み取った際のスキャナ本体の位置情報を取得して記録可能としたものが知られている。この場合、スキャナ本体とコード情報との距離が数センチメートル程度であれば、この方法によりコード情報の位置情報(コード情報の印刷面での位置情報)を取得することは可能となるが、数メートル離れてしまうと、コード情報の位置情報を正確に取得することが困難なものとなってしまう。
【0003】
また、従来においては、商品陳列棚の端部に複数の超音波センサと赤外線センサを設置しておき、商品コードを読み取る際にスキャナ部から赤外線及び超音波を出力し、超音波センサ及び赤外線センサによる検出結果に基づいて商品コードを読み取った棚アドレス(棚段、列)を特定するようにしたシステムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−258976号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した先行技術にあっては、商品陳列棚の端部に複数の超音波センサと赤外線センサを設置しておく必要があるほか、このようなセンサが設置されていない商品陳列棚には対応することができず、更には、スキャナ部とコード情報との距離が数メートル離れてしまうと、棚アドレスを正確に取得することが困難なものとなってしまう。
【0006】
本発明の課題は、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を適切に特定できるようにすることである。
【課題を解決するための手段】
【0007】
上述した課題を解決するために本発明の一つの態様は、
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置。
【0008】
上述した課題を解決するために本発明の他の態様は、
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【発明の効果】
【0009】
本発明によれば、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定することができ、利便性に富み、実用効果の高いものとなる。
【図面の簡単な説明】
【0010】
【図1】コード読取装置(スキャナ装置)1がネットワークを介して管理装置(サーバ装置)2に接続されている通信ネットワークシステムを示したブロック図。
【図2】スキャナ装置1の基本的な構成要素を示したブロック図。
【図3】レンズの焦点距離と被写体(コード情報)までの距離との関係を示した図。
【図4】地磁気センサ部18による検出範囲を説明するための図。
【図5】スキャナ装置1の概略を示した外観斜視図。
【図6】スキャナ装置1を使用して商品陳列棚上の物品(商品)からコード情報を読み取っている様子を示した図。
【図7】棚情報テーブルM3を説明するための図。
【図8】スキャナ装置1の全体動作のうち、本実施形態の特徴部分の動作概要(読取処理)を示したフローチャート。
【図9】コード情報読取及び距離取得処理(図8のステップA2)を詳述するためのフローチャート。
【図10】第2実施形態の在庫管理ネットワークシステムにおいてスキャナ装置1とサーバ装置2とにおける特徴的な動作を示したフローチャート。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
(第1実施形態)
先ず、図1〜図9を参照して本発明の第1実施形態を説明する。
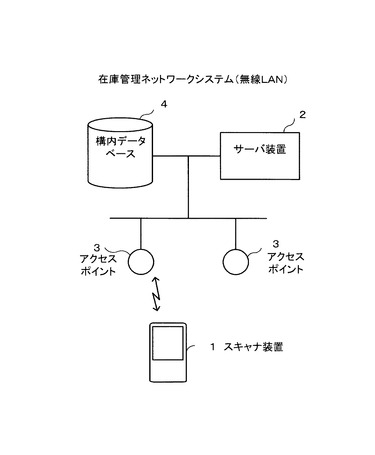
図1は、コード読取装置がネットワークを介して管理装置に接続されている通信ネットワークシステムを示したブロック図である。
この通信ネットワークシステムは、大型店舗などにおいて商品の在庫を管理する在庫管理ネットワークシステム(無線LAN)を示したもので、二次元コードや一次元コードを光学的に読み取るハンディタイプのコード読取装置(以下、スキャナ装置)1と店舗内の各商品の在庫を管理する管理装置(サーバ装置)2とが無線LAN(構内通信網)を構成するアクセスポイント3を介して接続されている。
【0012】
このスキャナ装置1とサーバ装置2との間では、無線LAN(構内通信網)を介してデータの送受信を行うようにしている。スキャナ装置1は、在庫管理業務時に商品に付されている二次元コードや一次元コードを読み取って収集管理すると共に、例えば、定期的あるいはユーザ操作に応じて収集データをサーバ装置2に対して一括して送信するようにしている。サーバ装置2は、スキャナ装置1からデータを受信処理して構内データベース4に記憶管理したり、構内データベース4内のデータを処理してスキャナ装置1に送信したりするようにしている。
【0013】
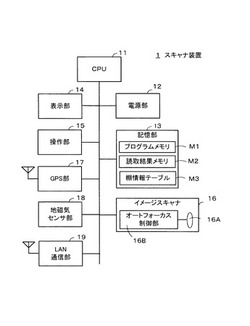
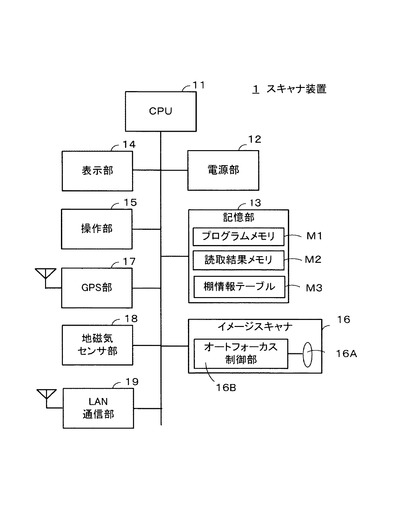
図2は、スキャナ装置1の基本的な構成要素を示したブロック図である。
スキャナ装置1は、二次元コードや一次元コード(以下、コード情報)を光学的に読み取るもので、CPU(中央演算処理装置)11を中核とする。CPU11は、電源部(二次電池)12からの電力供給によって動作し、記憶部13内の各種のプログラムに応じてこのスキャナ装置1の全体動作を制御する。記憶部13は、例えば、ROM、RAM、フラッシュメモリなどを有する構成で、後述する図8及び図9に示した動作手順に応じて本実施形態を実現するためのプログラムや各種のアプリケーションなどが格納されているプログラムメモリM1と、二次元コードや一次元コード(コード情報)を読み取った読取結果を記憶管理する読取結果メモリM2と、後述する棚情報テーブルM3を有するほか、このスキャナ装置1が動作するために必要となる各種の情報(例えば、フラグ、タイマなど)を一時的に記憶するワークメモリを有する構成となっている。
【0014】
CPU11には、その入出力周辺デバイスである表示部14、操作部15、イメージスキャナ16、GPS(全地球無線測位システム)部17、地磁気センサ部18、LAN通信部19が接続されている。表示部14は、高精細液晶ディスプレイ又は有機EL(Electro Luminescence)ディスプレイなどにより構成され、読み取ったコード情報を表示したり、各種のメッセージを表示したりする。なお、表示部14は、指などでタッチ操作された位置を検知してその座標データを入力するタッチスクリーンを構成するものであってもよい。操作部15は、押しボタン式の各種キー(読み取り動作の開始を指示するキーや読み取り動作の終了を指示するキーなど)を有し、操作キーに応じたデータやコマンドを入力する。
【0015】
イメージスキャナ16は、CCDやCMOSなどの画像センサ(イメージセンサ)によりコード情報を撮影するもので、イメージスキャナ16には、オートフォーカス機能が搭載されており、フォーカス調整用レンズ16A、オートフォーカス制御部16Bを有している。図3は、レンズの焦点距離と被写体(コード情報)までの距離(メートル)との関係を示した図で、レンズの焦点距離に応じてスキャナ本体から数センチメートルから数メートルまで離れているコード情報を読むことができるようになっている。CPU11は、イメージスキャナ16により撮影された画像データを解析することによってコード情報を読み取ると共に、オートフォーカス機能によって計測された読取対象(コード情報)までの距離情報を取得するようにしている。
【0016】
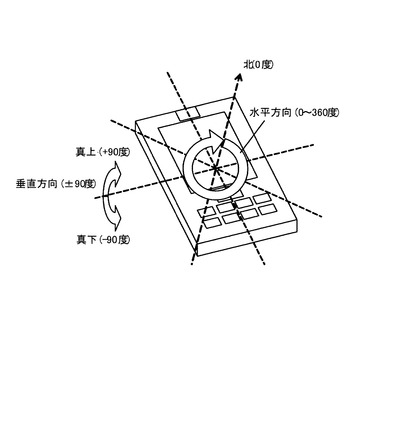
GPS部17は、GPS情報をスキャナ装置(装置本体)1の現在位置(経緯度情報)のほかに海抜高度を受信するもので、CPU11は、このGPS部17による受信結果をスキャナ装置1の位置情報及び高度情報を示す情報として取得する。地磁気センサ部18は、スキャナ装置1の姿勢を検出するための3軸タイプの地磁気センサで、スキャナ装置1の姿勢(向きと傾き)として水平方向の方向情報と共に垂直方向の方向情報を検出するもので、図4に示すように北を“0度”として水平方向の方向“0”〜“360度”を検出し、スキャナ装置1の上面部側(表示部14、操作部15の配設側)を“+90度”として垂直方向の方向情報を検出するようにしている。
【0017】
CPU11は、地磁気センサ部18により検出された方向情報(水平及び垂直方向の方向情報)をスキャナ装置1の現在の方向情報として取得する。なお、GPS部17、地磁気センサ部18は、一般的に用いられている技術であり、本実施形態ではその周知技術を利用するようにしているため、その具体的な説明については省略するものとする。LAN通信部19は、無線LAN(構内通信網)を介してサーバ装置2に接続されるもので、サーバ装置2との間ではデータの送受信を行うものである。
【0018】
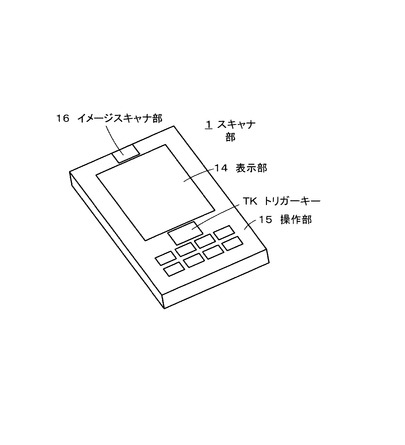
図5は、スキャナ装置1の概略を示した外観斜視図である。
スキャナ装置1を構成する装置本体(筐体)は、図5に示すように薄型の長方体を成し、装置本体の上面部には表示部14及び操作部15が配設され、また、装置本体の先端部にはイメージスキャナ16が配設されている。なお、図示省略したが、上述のGPS部17、地磁気センサ部18は、スキャナ装置1に内蔵されている。なお、図5に示した操作部15内のキーTKは、コード情報の読み取り開始を指示するトリガキーである。
【0019】
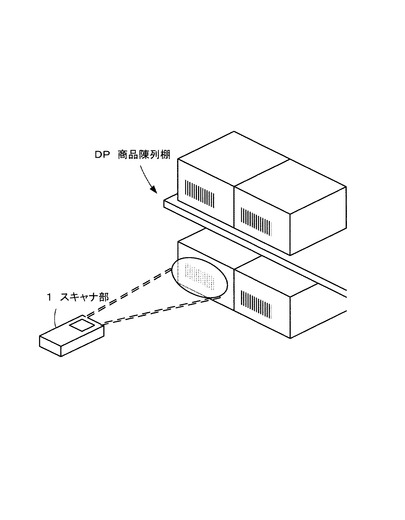
図6は、スキャナ装置1を使用して商品陳列棚上の物品(商品)からコード情報を読み取っている様子を示した図である。
商品陳列棚DPは、複数の段を有し、各段の列方向に複数の商品を並べて配置可能な構成で、どのような大きさの商品をどのような並び順で配置するかは任意であり、商品のサイズや配列の仕方を問わない構成となっている。すなわち、各段の列方向(図中、横方向)には仕切り板などを設けず、しかも、棚上では商品の配置位置も特定しないようにしているため、どのような大きさの商品をどのような並び順で配置するかは任意となっている。各商品の前面部には一次元コードが印刷又はバーコードラベルが貼り付けられており、この商品からコード情報を読み取る際にトリガキーTKが操作されると、イメージスキャナ16を駆動させてその商品からコード情報を読み取る動作を開始するようにしている。
【0020】
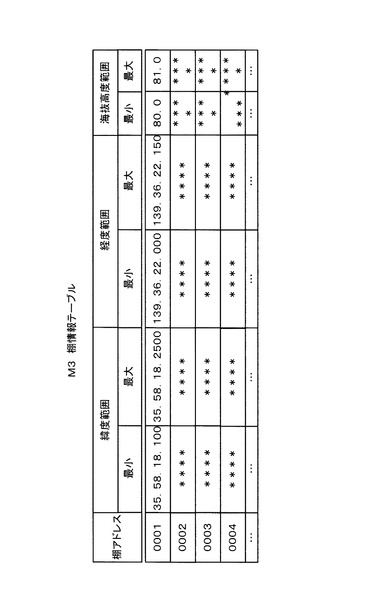
図7は、棚情報テーブルM3を説明するための図である。
棚情報テーブルM2は、棚に配置されている商品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶するテーブルであり、商品からコード情報を読み取る場合に、何段目の棚の何列目にその商品が配置されているかを示す棚アドレスを特定する際に、この棚情報テーブルM2が使用される。この棚情報テーブルM2の内容は、予め任意に設定可能なもので、例えば、商品を陳列した場合に、GPS部17によるスキャナ装置1の位置情報及び高度情報を取得しながら棚情報テーブルM3に設定する作業を行うようにしているが、その設定の仕方は任意である。棚情報テーブルM2は、「棚アドレス」毎に、商品の配置位置を示す棚位置情報として、「緯度範囲」、「経度範囲」、「海抜高度範囲」の項目を記憶する構成となっている。
【0021】
「棚アドレス」は、各商品が配置されている配置位置に順次割り当てられた棚番号“0001”、“0002”…を棚アドレスとするもので、例えば、棚番号“0001”は、1段目・1列目の位置を示し、“0002”は、1段目・2列目の位置を示している。なお、商品陳列棚DPが複数個存在している場合には、商品陳列棚DP毎にその棚識別情報(例えば、棚A、棚B…)を付加して記憶する構成であってもよい。例えば、棚Aで示される商品陳列棚DPに関する「棚アドレス」を“A0001”で表現し、また、棚Bで示される商品陳列棚DPに関する「棚アドレス」を“B0001”で表現するようにしてもよい。
【0022】
「緯度範囲」、「経度範囲」、「海抜高度範囲」は、商品陳列棚DPに配置されている各商品の配置位置を示す情報、つまり、その商品に付されているコード情報の位置(例えば、バーコード印刷面の位置)を示す情報で、水平方向の位置として緯度及び経度の最小値と最大値、また、垂直方向の位置として海抜高度の最小値と最大値が設定され、この緯度、経度、海抜高度により3次元の座標値を表すようにしている。CPU11は、コード情報を読み取る場合に、イメージスキャナ16のオートフォーカス機能による距離情報、GPS部17による位置情報及び高度情報、地磁気センサ部18による方向情報をそれぞれ取得し、この距離情報、位置情報及び高度情報、方向情報に基づいて、読取対象(コード情報)の位置情報(3次元座標系の位置)を所定の計算式に従って算出すると共に、算出したコード情報の位置情報に基づいて棚情報テーブルM2を検索することにより、該当する「棚アドレス」を棚情報テーブルM2から読み出すようにしている。すなわち、コード情報を読み取った商品が設置されている棚位置を示す「棚アドレス」を距離情報、位置情報及び高度情報、方向情報から特定するようにしている。
【0023】
次に、第1実施形態におけるスキャナ装置1の動作概念を図8及び図9に示すフローチャートを参照して説明する。ここで、これらのフローチャートに記述されている各機能は、読み取り可能なプログラムコードの形態で格納されており、このプログラムコードにしたがった動作が逐次実行される。また、ネットワークなどの伝送媒体を介して伝送されてきた上述のプログラムコードに従った動作を逐次実行することもできる。このことは後述する他の実施形態においても同様であり、記録媒体のほかに、伝送媒体を介して外部供給されたプログラム/データを利用して本実施形態特有の動作を実行することもできる。
【0024】
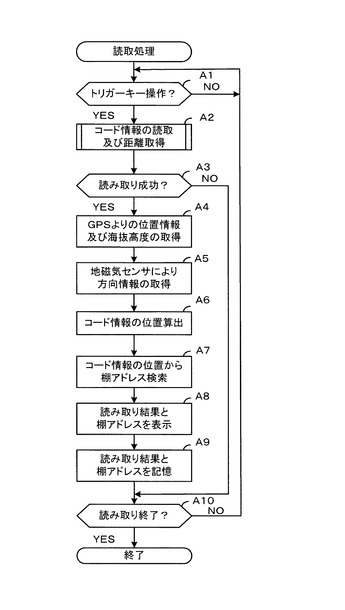
図8は、スキャナ装置1の全体動作のうち、第1実施形態の特徴部分の動作概要(読取処理)を示したフローチャートであり、この図8のフローから抜けた際には、全体動作のメインフロー(図示省略)に戻る。
先ず、CPU11は、コード情報の読み取り開始を指示する操作部15内のトリガキーTKが操作されるまでの入力待ち状態において、トリガキーTKが操作されると(ステップA1)、イメージスキャナ16を駆動させてコード情報の読み取り動作を開始すると共に、スキャナ装置1から読取対象のコード情報までの距離を取得する処理を行う(ステップA2)。
【0025】
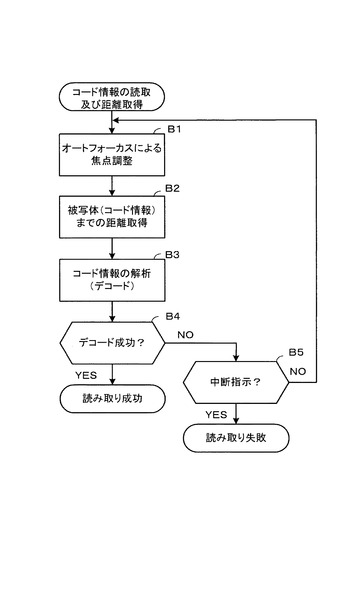
図9は、コード情報読取及び距離取得処理(図8のステップA2)を詳述するためのフローチャートである。
先ず、イメージスキャナ16を駆動させることによりそのオートフォーカス機能による焦点距離の調整処理が行われると(ステップB1)、その焦点距離に応じてスキャナ装置1から読取対象のコード情報までの距離を取得する(ステップB2)。そして、イメージスキャナ16により撮影された画像データを取得して画像解析(デコード)を行い(ステップB3)、正常にデコードが成功したかを調べる(ステップB4)。
【0026】
その結果、正常にデコードすることができたときには(ステップB4でYES)、読み取り成功と判断するが、正常にデコードすることができなかったときには(ステップB4でNO)、ユーザ操作による中断指示を受けたか否かを調べる(ステップB5)。ここで、操作部15内の中断指示キーが操作されなければ(ステップB5でNO)、上述のステップB1に戻って焦点距離の調整を行うが、中断指示キーが操作されたときには(ステップB5でYES)、読み取り失敗と判断する。
【0027】
このようにしてコード情報読取及び距離取得処理が終わると(図8のステップA2)、その判断結果は読み取り成功であるかを調べ(ステップA3)、読み取り失敗であれば(ステップA3でNO)、ステップA10に移って読み取り動作の終了がユーザ操作により指示されたかを調べる。また、読み取り成功であれば(ステップA3でYES)、GPS部17によりスキャナ装置1の現在位置(経緯度情報)及び海抜高度情報を取得する処理を行うと共に(ステップA4)、地磁気センサ部18によりスキャナ装置1の水平方向及び垂直方向の方向情報を取得する処理を行う(ステップA5)。
【0028】
これによって取得した距離情報、位置情報、海抜高度情報、方向情報に基づいて、今回読み取ったコード情報の位置情報(例えば、バーコード印刷面の位置情報)を次式に従って算出する処理を行う(ステップA6)。この場合の位置の算出には、以下のパラメータを使用するようにしている。
S=スキャナ装置1から読取対象であるコード情報までの距離
A=地磁気センサ18によって検出されたスキャナ装置1の垂直方向の角度
B=地磁気センサ18よって検出されたスキャナ装置1の水平方向の角度
H=GPS部17によるスキャナ装置1の海抜高度
La=GPS部17によるスキャナ装置1の緯度
Lo=GPS部17によるスキャナ装置1の経度
π=円周率
【0029】
スキャナ装置・コード情報間の高低差(E)=S×sinA
コード情報の海抜高度(Hb)=E+H
スキャナ装置・コード情報間の水平距離(T)=S×cosA
スキャナ装置・コード情報間の水平距離の東西方向成分(Tx)=T×sinB
スキャナ装置・コード情報間の水平距離の南北方向成分(Ty)=T×cosB
コード情報の緯度(Ma)=La+(Ty×360度)/(2×6370km×π)
コード情報の経度(Mo)=La+(Tx×360度)/(2×6370km×π)
【0030】
次に、上述のようにして算出したコード情報の位置情報(緯度、経度、海抜高度)に基づいて棚情報テーブルM3を検索し、この算出値に該当する「緯度範囲」、「経度範囲」、「海抜高度範囲」を特定して、それに対応する「棚アドレス」を棚情報テーブルM3から読み出する(ステップA7)。そして、この「棚アドレス」を読み取り結果(デコード結果)と共に表示部14に表示させると共に(ステップA8)、「棚アドレス」と読み取り結果(デコード結果)とを対応付けて(紐付けして)、読取結果メモリM2に記憶させた後(ステップA9)、操作部15内の終了指示キーが操作されたかを調べる(ステップA10)。ここで、終了指示キーが操作されなければ(ステップA10でNO)、最初のステップA1に戻ってトリガキーTKの操作待ち状態となり、以下、トリガキーTKが操作される毎に上述の動作を繰り返すが、終了指示キーが操作されたときには(ステップA10でYES)、図8のフローの終了となる。
【0031】
以上のように、第1実施形態においてCPU11は、コード情報を読み取る場合に、スキャナ装置1からコード情報までの距離情報、スキャナ装置1の位置情報、スキャナ装置1の方向情報を取得し、この距離情報、位置情報、方向情報に基づいて、読取対象(コード情報)の位置情報を算出するようにしたので、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定することができる。これによって従来のように超音波センサ及び赤外線センサを棚に配設しておかなくてもよく、どのような種類の棚であっても対応することができる。また、棚アドレスや棚位置を記録したラベルなどを棚の商品設置位置に貼り付けておかなくてもよく、しかも、そのラベルに記録されているコード情報を読み取る作業も不要となるなど、利便性に富み、実用効果の高いものとなる。
【0032】
CPU11は、算出したコード情報の位置情報に基づいて棚情報テーブルM3を検索し、その検索結果に基づいてコード情報の位置情報に該当する棚アドレスを読み出して特定するようにしたので、コード情報の位置情報から棚アドレスを容易に特定することができる。
【0033】
棚情報テーブルM3から検索した棚アドレスを表示するようにしたので、ユーザにあっては、コード情報の読み取り時に読取対象の商品がどこに配置されているかを知ることができる。
【0034】
算出したコード情報の位置情報と読み取ったコード情報とを対応付けて読取結果メモリM2に記憶管理するようにしたので、ユーザにあっては、その対応関係を何時でも自由に知ることができる。
【0035】
CPU11は、距離情報、位置情報、方向情報のほかにGPS部17による高度情報に基づいて3次元座標系におけるコード情報の位置情報を算出するようにしたので、何段目の何列目の棚位置に商品が配置されているかを特定することができる。
【0036】
イメージスキャナ16のオートフォーカス機能によりスキャナ装置1からコード情報までの距離情報を取得するようにしたので、その距離の取得が容易かつ適切なものとなる。
【0037】
地磁気センサ部18によりスキャナ装置1の水平方向の方向情報と共に垂直方向の方向情報を取得するようにしたので、スキャナ装置1がどのような姿勢であってもスキャナ装置1の向きを容易かつ適切に取得することができる。
【0038】
(第2実施形態)
以下、この発明の第2実施形態について図10を参照して説明する。
なお、上述した第1実施形態においては、スキャナ装置1自身がコード情報の位置情報を算出して記憶管理するようにしたが、この第2実施形態においては、スキャナ装置1にネットワーク接続されているサーバ装置2がコード情報の位置情報を算出して記憶管理するようにしたものである。また、第1実施形態では棚情報テーブルM3をスキャナ装置1側に設けたが、第2実施形態ではサーバ装置2側の構内データベース4に設けたものである。ここで、両実施形態において基本的あるいは名称的に同一のものは、同一符号を付して示し、その説明を省略すると共に、以下、第2実施形態の特徴部分を中心に説明するものとする。
【0039】
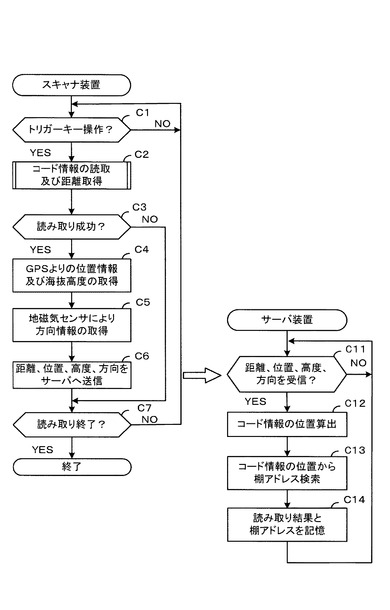
図10は、第2実施形態の在庫管理ネットワークシステムにおいてスキャナ装置1とサーバ装置2とにおける特徴的な動作を示したフローチャートである。
先ず、スキャナ装置1側では、トリガキーTKが操作されると(ステップC1)、イメージスキャナ16を駆動させてコード情報の読み取り動作を開始すると共に、スキャナ装置1から読取対象のコード情報までの距離を取得する処理を行う(ステップC2)。なお、このコード情報読取と距離取得処理は、上述した図9のフローチャートに従って実行される結果、その説明は省略するものとする。
【0040】
ここで、イメージスキャナ16により撮影された画像データを取得して画像解析(デコード)を行った結果、正常にデコードすることができなかったときには(ステップC3でNO)、読み取り失敗と判断して、ステップC7に移って読み取り動作の終了が指示されたかを調べる。また、読み取り成功であれば(ステップC3でYES)、GPS部17によりスキャナ装置1の現在位置(経緯度情報)及び海抜高度情報を取得すると共に(ステップC4)、地磁気センサ部18によりスキャナ装置1の水平方向及び垂直方向の方向情報を取得する(ステップC5)。これによって取得した距離情報、位置情報、海抜高度情報、方向情報をサーバ装置2に送信する(ステップC6)。以下、読み取り動作の終了を指示する終了キーが操作されるまで上述の動作を繰り返す。
【0041】
一方、サーバ装置2側では受信待ち状態においてスキャナ装置1から距離情報、位置情報、海抜高度情報、方向情報を受信すると(ステップC11でYES)、今回読み取ったコード情報の位置を第1実施形態で示した式に従って算出する処理を行う(ステップC12)。これによって算出したコード情報の位置情報(緯度、経度、海抜高度)に基づいて構内データベース4内の棚情報テーブルM3を検索して、この算出値に該当する「緯度範囲」、「経度範囲」、「海抜高度範囲」を特定し、それに対応する「棚アドレス」を棚情報テーブルM3から読み出す(ステップC13)。そして、この「棚アドレス」とコード情報のデコード結果とを対応付けて(紐付けして)、構内データベース4に記憶させた後(ステップC14)、上述のステップC11に戻って受信待ち状態となる。
【0042】
以上のように、第2実施形態においてスキャナ装置1は、コード情報を読み取る場合に、コード情報までの距離情報、スキャナ装置1の位置情報、スキャナ装置1の方向情報を取得してサーバ装置2に送信し、サーバ装置2は、スキャナ装置1から距離情報、位置情報、海抜高度情報、方向情報を受信すると、コード情報の位置情報を算出するようにしたので、その算出処理をサーバ装置2側に任せることができ、それだけスキャナ装置1の負担を軽減することができる。
【0043】
サーバ装置2は、算出したコード情報の位置情報に基づいて棚情報テーブルM2を検索することにより、該当する「棚アドレス」を特定するようにしたので、「棚アドレス」の特定をサーバ装置2側に任せることができ、それだけスキャナ装置1の負担を軽減することができる。
【0044】
なお、上述した各実施形態においては、商品の在庫を管理するシステムに適用した場合を示したが、商品に限らず、コード情報が付加されている物品であれば同様に適用可能である。
【0045】
また、上述した各実施形態においては、スキャナ装置1とサーバ装置2とを無線LAN(構内通信網)を介して接続する構成する通信システムに適用した場合を例示したが、これに限らず、インターネットなどの広域通信網を介して接続する広域通信システムに適用してもよい。
【0046】
また、上述した各実施形態においては、読取対象として、一次元コード、二次元コードを示したが、例えば、ロゴ、OCR文字、シンボルマークなどであってもよい。
【0047】
また、上述した各実施形態においては、スキャナ装置1に適用した場合を示したが、スキャナ付のハンディターミナル・PDA・デジタルカメラ・音楽プレイヤーなどであってもよい。
【0048】
また、上述した各実施形態において示した“装置”や“部”とは、機能別に複数の筐体に分離されていてもよく、単一の筐体に限らない。また、上述したフローチャートに記述した各ステップは、時系列的な処理に限らず、複数のステップを並列的に処理したり、別個独立して処理したりするようにしてもよい。
【0049】
以上、この発明のいくつかの実施形態について説明したが、この発明は、これに限定されるものではなく、特許請求の範囲に記載された発明とその均等の範囲を含むものである。
以下、本願出願の特許請求の範囲に記載された発明を付記する。
【0050】
(付記)
請求項1に記載の発明は、
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置である。
【0051】
請求項2に記載の発明は、請求項1に記載のコード情報読取装置において、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とするコード情報読取装置である。
【0052】
請求項3に記載の発明は、請求項2に記載のコード情報読取装置において、
前記検索手段により検索された棚アドレスを表示する表示手段を更に備える、
ようにしたことを特徴とするコード情報読取装置である。
【0053】
請求項4に記載の発明は、請求項2に記載のコード情報読取装置において、
前記検索手段により検索された棚アドレスと前記読み取ったコード情報とを対応付けて記憶管理する読取結果記憶手段を更に備える、
ようにしたことを特徴とするコード情報読取装置である。
【0054】
請求項5に記載の発明は、請求項1記載のコード情報読取装置において、
当該装置本体の高度情報を取得する高度取得手段を更に備え、
前記算出手段は、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報のほか、前記高度取得手段により取得した高度情報に基づいて3次元座標系における前記コード情報の位置情報を算出する、
ようにしたことを特徴とするコード情報読取装置である。
【0055】
請求項6に記載の発明は、請求項5記載のコード情報読取装置において、
前記位置取得手段は、当該装置本体の位置情報として経緯度情報と共にその海抜高度情報を取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0056】
請求項7に記載の発明は、請求項1記載のコード情報読取装置において、
前記距離取得手段は、コード情報を読み取るイメージセンサに備えられているオートフォーカス機能によって計測された前記コード情報までの距離情報を取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0057】
請求項8に記載の発明は、請求項1記載のコード情報読取装置において、
前記方向取得手段は、当該装置本体の方向として水平方向の方向と共に垂直方向の方向を検出して取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0058】
請求項9に記載の発明は、
物品に付されたコード情報を読み取るコード情報読取装置と、各種物品に関する情報を記憶管理する管理装置とが通信接続されている物品管理システムであって、
前記コード情報読取装置を構成する装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
前記装置本体の位置情報を取得する位置取得手段と、
前記装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取った際に前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とする物品管理システムである。
【0059】
請求項10に記載の発明は、請求項9記載の物品管理システムにおいて、
前記コード情報読取装置は、前記距離取得手段、前記位置取得手段、前記方向取得手段のほか、前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報を前記管理装置に送信する送信手段を備え、
前記管理装置は、
前記算出手段のほかに、前記コード情報読取装置から前記距離情報、位置情報、方向情報を受信する受信手段を備える、
ようにしたことを特徴とする物品管理システムである。
【0060】
請求項11に記載の発明は、請求項9記載の物品管理システムにおいて、
前記管理装置は、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする物品管理システムである。
【0061】
請求項12に記載の発明は、
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【符号の説明】
【0062】
1 コード読取装置(スキャナ装置)
2 管理装置(サーバ装置)
4 構内データベース
11 CPU
13 記憶部
14 表示部
15 操作部
16 イメージスキャナ
17 GPS部
18 地磁気センサ部
19 LAN通信部
M1 プログラムメモリ
M2 読取結果メモリ
M3 棚情報テーブル
【技術分野】
【0001】
本発明は、物品に付されたコード情報を読み取るコード情報読取装置及び物品管理システム並びにプログラムに関する。
【背景技術】
【0002】
一般に、二次元コードや一次元コードなどのコード情報を光学的に読み取るコード読取装置(スキャナ装置)は、CCDやCMOSなどの画像センサー(イメージセンサ)により高解像度撮影した画像データを解析(デコード)することによりコード情報を読み取るようにしている。
ところで、従来では、スキャナ装置にGPS機能(全地球無線測位システム機能)を搭載することにより、バーコードを読み取った際のスキャナ本体の位置情報を取得して記録可能としたものが知られている。この場合、スキャナ本体とコード情報との距離が数センチメートル程度であれば、この方法によりコード情報の位置情報(コード情報の印刷面での位置情報)を取得することは可能となるが、数メートル離れてしまうと、コード情報の位置情報を正確に取得することが困難なものとなってしまう。
【0003】
また、従来においては、商品陳列棚の端部に複数の超音波センサと赤外線センサを設置しておき、商品コードを読み取る際にスキャナ部から赤外線及び超音波を出力し、超音波センサ及び赤外線センサによる検出結果に基づいて商品コードを読み取った棚アドレス(棚段、列)を特定するようにしたシステムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−258976号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した先行技術にあっては、商品陳列棚の端部に複数の超音波センサと赤外線センサを設置しておく必要があるほか、このようなセンサが設置されていない商品陳列棚には対応することができず、更には、スキャナ部とコード情報との距離が数メートル離れてしまうと、棚アドレスを正確に取得することが困難なものとなってしまう。
【0006】
本発明の課題は、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を適切に特定できるようにすることである。
【課題を解決するための手段】
【0007】
上述した課題を解決するために本発明の一つの態様は、
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置。
【0008】
上述した課題を解決するために本発明の他の態様は、
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【発明の効果】
【0009】
本発明によれば、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定することができ、利便性に富み、実用効果の高いものとなる。
【図面の簡単な説明】
【0010】
【図1】コード読取装置(スキャナ装置)1がネットワークを介して管理装置(サーバ装置)2に接続されている通信ネットワークシステムを示したブロック図。
【図2】スキャナ装置1の基本的な構成要素を示したブロック図。
【図3】レンズの焦点距離と被写体(コード情報)までの距離との関係を示した図。
【図4】地磁気センサ部18による検出範囲を説明するための図。
【図5】スキャナ装置1の概略を示した外観斜視図。
【図6】スキャナ装置1を使用して商品陳列棚上の物品(商品)からコード情報を読み取っている様子を示した図。
【図7】棚情報テーブルM3を説明するための図。
【図8】スキャナ装置1の全体動作のうち、本実施形態の特徴部分の動作概要(読取処理)を示したフローチャート。
【図9】コード情報読取及び距離取得処理(図8のステップA2)を詳述するためのフローチャート。
【図10】第2実施形態の在庫管理ネットワークシステムにおいてスキャナ装置1とサーバ装置2とにおける特徴的な動作を示したフローチャート。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
(第1実施形態)
先ず、図1〜図9を参照して本発明の第1実施形態を説明する。
図1は、コード読取装置がネットワークを介して管理装置に接続されている通信ネットワークシステムを示したブロック図である。
この通信ネットワークシステムは、大型店舗などにおいて商品の在庫を管理する在庫管理ネットワークシステム(無線LAN)を示したもので、二次元コードや一次元コードを光学的に読み取るハンディタイプのコード読取装置(以下、スキャナ装置)1と店舗内の各商品の在庫を管理する管理装置(サーバ装置)2とが無線LAN(構内通信網)を構成するアクセスポイント3を介して接続されている。
【0012】
このスキャナ装置1とサーバ装置2との間では、無線LAN(構内通信網)を介してデータの送受信を行うようにしている。スキャナ装置1は、在庫管理業務時に商品に付されている二次元コードや一次元コードを読み取って収集管理すると共に、例えば、定期的あるいはユーザ操作に応じて収集データをサーバ装置2に対して一括して送信するようにしている。サーバ装置2は、スキャナ装置1からデータを受信処理して構内データベース4に記憶管理したり、構内データベース4内のデータを処理してスキャナ装置1に送信したりするようにしている。
【0013】
図2は、スキャナ装置1の基本的な構成要素を示したブロック図である。
スキャナ装置1は、二次元コードや一次元コード(以下、コード情報)を光学的に読み取るもので、CPU(中央演算処理装置)11を中核とする。CPU11は、電源部(二次電池)12からの電力供給によって動作し、記憶部13内の各種のプログラムに応じてこのスキャナ装置1の全体動作を制御する。記憶部13は、例えば、ROM、RAM、フラッシュメモリなどを有する構成で、後述する図8及び図9に示した動作手順に応じて本実施形態を実現するためのプログラムや各種のアプリケーションなどが格納されているプログラムメモリM1と、二次元コードや一次元コード(コード情報)を読み取った読取結果を記憶管理する読取結果メモリM2と、後述する棚情報テーブルM3を有するほか、このスキャナ装置1が動作するために必要となる各種の情報(例えば、フラグ、タイマなど)を一時的に記憶するワークメモリを有する構成となっている。
【0014】
CPU11には、その入出力周辺デバイスである表示部14、操作部15、イメージスキャナ16、GPS(全地球無線測位システム)部17、地磁気センサ部18、LAN通信部19が接続されている。表示部14は、高精細液晶ディスプレイ又は有機EL(Electro Luminescence)ディスプレイなどにより構成され、読み取ったコード情報を表示したり、各種のメッセージを表示したりする。なお、表示部14は、指などでタッチ操作された位置を検知してその座標データを入力するタッチスクリーンを構成するものであってもよい。操作部15は、押しボタン式の各種キー(読み取り動作の開始を指示するキーや読み取り動作の終了を指示するキーなど)を有し、操作キーに応じたデータやコマンドを入力する。
【0015】
イメージスキャナ16は、CCDやCMOSなどの画像センサ(イメージセンサ)によりコード情報を撮影するもので、イメージスキャナ16には、オートフォーカス機能が搭載されており、フォーカス調整用レンズ16A、オートフォーカス制御部16Bを有している。図3は、レンズの焦点距離と被写体(コード情報)までの距離(メートル)との関係を示した図で、レンズの焦点距離に応じてスキャナ本体から数センチメートルから数メートルまで離れているコード情報を読むことができるようになっている。CPU11は、イメージスキャナ16により撮影された画像データを解析することによってコード情報を読み取ると共に、オートフォーカス機能によって計測された読取対象(コード情報)までの距離情報を取得するようにしている。
【0016】
GPS部17は、GPS情報をスキャナ装置(装置本体)1の現在位置(経緯度情報)のほかに海抜高度を受信するもので、CPU11は、このGPS部17による受信結果をスキャナ装置1の位置情報及び高度情報を示す情報として取得する。地磁気センサ部18は、スキャナ装置1の姿勢を検出するための3軸タイプの地磁気センサで、スキャナ装置1の姿勢(向きと傾き)として水平方向の方向情報と共に垂直方向の方向情報を検出するもので、図4に示すように北を“0度”として水平方向の方向“0”〜“360度”を検出し、スキャナ装置1の上面部側(表示部14、操作部15の配設側)を“+90度”として垂直方向の方向情報を検出するようにしている。
【0017】
CPU11は、地磁気センサ部18により検出された方向情報(水平及び垂直方向の方向情報)をスキャナ装置1の現在の方向情報として取得する。なお、GPS部17、地磁気センサ部18は、一般的に用いられている技術であり、本実施形態ではその周知技術を利用するようにしているため、その具体的な説明については省略するものとする。LAN通信部19は、無線LAN(構内通信網)を介してサーバ装置2に接続されるもので、サーバ装置2との間ではデータの送受信を行うものである。
【0018】
図5は、スキャナ装置1の概略を示した外観斜視図である。
スキャナ装置1を構成する装置本体(筐体)は、図5に示すように薄型の長方体を成し、装置本体の上面部には表示部14及び操作部15が配設され、また、装置本体の先端部にはイメージスキャナ16が配設されている。なお、図示省略したが、上述のGPS部17、地磁気センサ部18は、スキャナ装置1に内蔵されている。なお、図5に示した操作部15内のキーTKは、コード情報の読み取り開始を指示するトリガキーである。
【0019】
図6は、スキャナ装置1を使用して商品陳列棚上の物品(商品)からコード情報を読み取っている様子を示した図である。
商品陳列棚DPは、複数の段を有し、各段の列方向に複数の商品を並べて配置可能な構成で、どのような大きさの商品をどのような並び順で配置するかは任意であり、商品のサイズや配列の仕方を問わない構成となっている。すなわち、各段の列方向(図中、横方向)には仕切り板などを設けず、しかも、棚上では商品の配置位置も特定しないようにしているため、どのような大きさの商品をどのような並び順で配置するかは任意となっている。各商品の前面部には一次元コードが印刷又はバーコードラベルが貼り付けられており、この商品からコード情報を読み取る際にトリガキーTKが操作されると、イメージスキャナ16を駆動させてその商品からコード情報を読み取る動作を開始するようにしている。
【0020】
図7は、棚情報テーブルM3を説明するための図である。
棚情報テーブルM2は、棚に配置されている商品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶するテーブルであり、商品からコード情報を読み取る場合に、何段目の棚の何列目にその商品が配置されているかを示す棚アドレスを特定する際に、この棚情報テーブルM2が使用される。この棚情報テーブルM2の内容は、予め任意に設定可能なもので、例えば、商品を陳列した場合に、GPS部17によるスキャナ装置1の位置情報及び高度情報を取得しながら棚情報テーブルM3に設定する作業を行うようにしているが、その設定の仕方は任意である。棚情報テーブルM2は、「棚アドレス」毎に、商品の配置位置を示す棚位置情報として、「緯度範囲」、「経度範囲」、「海抜高度範囲」の項目を記憶する構成となっている。
【0021】
「棚アドレス」は、各商品が配置されている配置位置に順次割り当てられた棚番号“0001”、“0002”…を棚アドレスとするもので、例えば、棚番号“0001”は、1段目・1列目の位置を示し、“0002”は、1段目・2列目の位置を示している。なお、商品陳列棚DPが複数個存在している場合には、商品陳列棚DP毎にその棚識別情報(例えば、棚A、棚B…)を付加して記憶する構成であってもよい。例えば、棚Aで示される商品陳列棚DPに関する「棚アドレス」を“A0001”で表現し、また、棚Bで示される商品陳列棚DPに関する「棚アドレス」を“B0001”で表現するようにしてもよい。
【0022】
「緯度範囲」、「経度範囲」、「海抜高度範囲」は、商品陳列棚DPに配置されている各商品の配置位置を示す情報、つまり、その商品に付されているコード情報の位置(例えば、バーコード印刷面の位置)を示す情報で、水平方向の位置として緯度及び経度の最小値と最大値、また、垂直方向の位置として海抜高度の最小値と最大値が設定され、この緯度、経度、海抜高度により3次元の座標値を表すようにしている。CPU11は、コード情報を読み取る場合に、イメージスキャナ16のオートフォーカス機能による距離情報、GPS部17による位置情報及び高度情報、地磁気センサ部18による方向情報をそれぞれ取得し、この距離情報、位置情報及び高度情報、方向情報に基づいて、読取対象(コード情報)の位置情報(3次元座標系の位置)を所定の計算式に従って算出すると共に、算出したコード情報の位置情報に基づいて棚情報テーブルM2を検索することにより、該当する「棚アドレス」を棚情報テーブルM2から読み出すようにしている。すなわち、コード情報を読み取った商品が設置されている棚位置を示す「棚アドレス」を距離情報、位置情報及び高度情報、方向情報から特定するようにしている。
【0023】
次に、第1実施形態におけるスキャナ装置1の動作概念を図8及び図9に示すフローチャートを参照して説明する。ここで、これらのフローチャートに記述されている各機能は、読み取り可能なプログラムコードの形態で格納されており、このプログラムコードにしたがった動作が逐次実行される。また、ネットワークなどの伝送媒体を介して伝送されてきた上述のプログラムコードに従った動作を逐次実行することもできる。このことは後述する他の実施形態においても同様であり、記録媒体のほかに、伝送媒体を介して外部供給されたプログラム/データを利用して本実施形態特有の動作を実行することもできる。
【0024】
図8は、スキャナ装置1の全体動作のうち、第1実施形態の特徴部分の動作概要(読取処理)を示したフローチャートであり、この図8のフローから抜けた際には、全体動作のメインフロー(図示省略)に戻る。
先ず、CPU11は、コード情報の読み取り開始を指示する操作部15内のトリガキーTKが操作されるまでの入力待ち状態において、トリガキーTKが操作されると(ステップA1)、イメージスキャナ16を駆動させてコード情報の読み取り動作を開始すると共に、スキャナ装置1から読取対象のコード情報までの距離を取得する処理を行う(ステップA2)。
【0025】
図9は、コード情報読取及び距離取得処理(図8のステップA2)を詳述するためのフローチャートである。
先ず、イメージスキャナ16を駆動させることによりそのオートフォーカス機能による焦点距離の調整処理が行われると(ステップB1)、その焦点距離に応じてスキャナ装置1から読取対象のコード情報までの距離を取得する(ステップB2)。そして、イメージスキャナ16により撮影された画像データを取得して画像解析(デコード)を行い(ステップB3)、正常にデコードが成功したかを調べる(ステップB4)。
【0026】
その結果、正常にデコードすることができたときには(ステップB4でYES)、読み取り成功と判断するが、正常にデコードすることができなかったときには(ステップB4でNO)、ユーザ操作による中断指示を受けたか否かを調べる(ステップB5)。ここで、操作部15内の中断指示キーが操作されなければ(ステップB5でNO)、上述のステップB1に戻って焦点距離の調整を行うが、中断指示キーが操作されたときには(ステップB5でYES)、読み取り失敗と判断する。
【0027】
このようにしてコード情報読取及び距離取得処理が終わると(図8のステップA2)、その判断結果は読み取り成功であるかを調べ(ステップA3)、読み取り失敗であれば(ステップA3でNO)、ステップA10に移って読み取り動作の終了がユーザ操作により指示されたかを調べる。また、読み取り成功であれば(ステップA3でYES)、GPS部17によりスキャナ装置1の現在位置(経緯度情報)及び海抜高度情報を取得する処理を行うと共に(ステップA4)、地磁気センサ部18によりスキャナ装置1の水平方向及び垂直方向の方向情報を取得する処理を行う(ステップA5)。
【0028】
これによって取得した距離情報、位置情報、海抜高度情報、方向情報に基づいて、今回読み取ったコード情報の位置情報(例えば、バーコード印刷面の位置情報)を次式に従って算出する処理を行う(ステップA6)。この場合の位置の算出には、以下のパラメータを使用するようにしている。
S=スキャナ装置1から読取対象であるコード情報までの距離
A=地磁気センサ18によって検出されたスキャナ装置1の垂直方向の角度
B=地磁気センサ18よって検出されたスキャナ装置1の水平方向の角度
H=GPS部17によるスキャナ装置1の海抜高度
La=GPS部17によるスキャナ装置1の緯度
Lo=GPS部17によるスキャナ装置1の経度
π=円周率
【0029】
スキャナ装置・コード情報間の高低差(E)=S×sinA
コード情報の海抜高度(Hb)=E+H
スキャナ装置・コード情報間の水平距離(T)=S×cosA
スキャナ装置・コード情報間の水平距離の東西方向成分(Tx)=T×sinB
スキャナ装置・コード情報間の水平距離の南北方向成分(Ty)=T×cosB
コード情報の緯度(Ma)=La+(Ty×360度)/(2×6370km×π)
コード情報の経度(Mo)=La+(Tx×360度)/(2×6370km×π)
【0030】
次に、上述のようにして算出したコード情報の位置情報(緯度、経度、海抜高度)に基づいて棚情報テーブルM3を検索し、この算出値に該当する「緯度範囲」、「経度範囲」、「海抜高度範囲」を特定して、それに対応する「棚アドレス」を棚情報テーブルM3から読み出する(ステップA7)。そして、この「棚アドレス」を読み取り結果(デコード結果)と共に表示部14に表示させると共に(ステップA8)、「棚アドレス」と読み取り結果(デコード結果)とを対応付けて(紐付けして)、読取結果メモリM2に記憶させた後(ステップA9)、操作部15内の終了指示キーが操作されたかを調べる(ステップA10)。ここで、終了指示キーが操作されなければ(ステップA10でNO)、最初のステップA1に戻ってトリガキーTKの操作待ち状態となり、以下、トリガキーTKが操作される毎に上述の動作を繰り返すが、終了指示キーが操作されたときには(ステップA10でYES)、図8のフローの終了となる。
【0031】
以上のように、第1実施形態においてCPU11は、コード情報を読み取る場合に、スキャナ装置1からコード情報までの距離情報、スキャナ装置1の位置情報、スキャナ装置1の方向情報を取得し、この距離情報、位置情報、方向情報に基づいて、読取対象(コード情報)の位置情報を算出するようにしたので、装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定することができる。これによって従来のように超音波センサ及び赤外線センサを棚に配設しておかなくてもよく、どのような種類の棚であっても対応することができる。また、棚アドレスや棚位置を記録したラベルなどを棚の商品設置位置に貼り付けておかなくてもよく、しかも、そのラベルに記録されているコード情報を読み取る作業も不要となるなど、利便性に富み、実用効果の高いものとなる。
【0032】
CPU11は、算出したコード情報の位置情報に基づいて棚情報テーブルM3を検索し、その検索結果に基づいてコード情報の位置情報に該当する棚アドレスを読み出して特定するようにしたので、コード情報の位置情報から棚アドレスを容易に特定することができる。
【0033】
棚情報テーブルM3から検索した棚アドレスを表示するようにしたので、ユーザにあっては、コード情報の読み取り時に読取対象の商品がどこに配置されているかを知ることができる。
【0034】
算出したコード情報の位置情報と読み取ったコード情報とを対応付けて読取結果メモリM2に記憶管理するようにしたので、ユーザにあっては、その対応関係を何時でも自由に知ることができる。
【0035】
CPU11は、距離情報、位置情報、方向情報のほかにGPS部17による高度情報に基づいて3次元座標系におけるコード情報の位置情報を算出するようにしたので、何段目の何列目の棚位置に商品が配置されているかを特定することができる。
【0036】
イメージスキャナ16のオートフォーカス機能によりスキャナ装置1からコード情報までの距離情報を取得するようにしたので、その距離の取得が容易かつ適切なものとなる。
【0037】
地磁気センサ部18によりスキャナ装置1の水平方向の方向情報と共に垂直方向の方向情報を取得するようにしたので、スキャナ装置1がどのような姿勢であってもスキャナ装置1の向きを容易かつ適切に取得することができる。
【0038】
(第2実施形態)
以下、この発明の第2実施形態について図10を参照して説明する。
なお、上述した第1実施形態においては、スキャナ装置1自身がコード情報の位置情報を算出して記憶管理するようにしたが、この第2実施形態においては、スキャナ装置1にネットワーク接続されているサーバ装置2がコード情報の位置情報を算出して記憶管理するようにしたものである。また、第1実施形態では棚情報テーブルM3をスキャナ装置1側に設けたが、第2実施形態ではサーバ装置2側の構内データベース4に設けたものである。ここで、両実施形態において基本的あるいは名称的に同一のものは、同一符号を付して示し、その説明を省略すると共に、以下、第2実施形態の特徴部分を中心に説明するものとする。
【0039】
図10は、第2実施形態の在庫管理ネットワークシステムにおいてスキャナ装置1とサーバ装置2とにおける特徴的な動作を示したフローチャートである。
先ず、スキャナ装置1側では、トリガキーTKが操作されると(ステップC1)、イメージスキャナ16を駆動させてコード情報の読み取り動作を開始すると共に、スキャナ装置1から読取対象のコード情報までの距離を取得する処理を行う(ステップC2)。なお、このコード情報読取と距離取得処理は、上述した図9のフローチャートに従って実行される結果、その説明は省略するものとする。
【0040】
ここで、イメージスキャナ16により撮影された画像データを取得して画像解析(デコード)を行った結果、正常にデコードすることができなかったときには(ステップC3でNO)、読み取り失敗と判断して、ステップC7に移って読み取り動作の終了が指示されたかを調べる。また、読み取り成功であれば(ステップC3でYES)、GPS部17によりスキャナ装置1の現在位置(経緯度情報)及び海抜高度情報を取得すると共に(ステップC4)、地磁気センサ部18によりスキャナ装置1の水平方向及び垂直方向の方向情報を取得する(ステップC5)。これによって取得した距離情報、位置情報、海抜高度情報、方向情報をサーバ装置2に送信する(ステップC6)。以下、読み取り動作の終了を指示する終了キーが操作されるまで上述の動作を繰り返す。
【0041】
一方、サーバ装置2側では受信待ち状態においてスキャナ装置1から距離情報、位置情報、海抜高度情報、方向情報を受信すると(ステップC11でYES)、今回読み取ったコード情報の位置を第1実施形態で示した式に従って算出する処理を行う(ステップC12)。これによって算出したコード情報の位置情報(緯度、経度、海抜高度)に基づいて構内データベース4内の棚情報テーブルM3を検索して、この算出値に該当する「緯度範囲」、「経度範囲」、「海抜高度範囲」を特定し、それに対応する「棚アドレス」を棚情報テーブルM3から読み出す(ステップC13)。そして、この「棚アドレス」とコード情報のデコード結果とを対応付けて(紐付けして)、構内データベース4に記憶させた後(ステップC14)、上述のステップC11に戻って受信待ち状態となる。
【0042】
以上のように、第2実施形態においてスキャナ装置1は、コード情報を読み取る場合に、コード情報までの距離情報、スキャナ装置1の位置情報、スキャナ装置1の方向情報を取得してサーバ装置2に送信し、サーバ装置2は、スキャナ装置1から距離情報、位置情報、海抜高度情報、方向情報を受信すると、コード情報の位置情報を算出するようにしたので、その算出処理をサーバ装置2側に任せることができ、それだけスキャナ装置1の負担を軽減することができる。
【0043】
サーバ装置2は、算出したコード情報の位置情報に基づいて棚情報テーブルM2を検索することにより、該当する「棚アドレス」を特定するようにしたので、「棚アドレス」の特定をサーバ装置2側に任せることができ、それだけスキャナ装置1の負担を軽減することができる。
【0044】
なお、上述した各実施形態においては、商品の在庫を管理するシステムに適用した場合を示したが、商品に限らず、コード情報が付加されている物品であれば同様に適用可能である。
【0045】
また、上述した各実施形態においては、スキャナ装置1とサーバ装置2とを無線LAN(構内通信網)を介して接続する構成する通信システムに適用した場合を例示したが、これに限らず、インターネットなどの広域通信網を介して接続する広域通信システムに適用してもよい。
【0046】
また、上述した各実施形態においては、読取対象として、一次元コード、二次元コードを示したが、例えば、ロゴ、OCR文字、シンボルマークなどであってもよい。
【0047】
また、上述した各実施形態においては、スキャナ装置1に適用した場合を示したが、スキャナ付のハンディターミナル・PDA・デジタルカメラ・音楽プレイヤーなどであってもよい。
【0048】
また、上述した各実施形態において示した“装置”や“部”とは、機能別に複数の筐体に分離されていてもよく、単一の筐体に限らない。また、上述したフローチャートに記述した各ステップは、時系列的な処理に限らず、複数のステップを並列的に処理したり、別個独立して処理したりするようにしてもよい。
【0049】
以上、この発明のいくつかの実施形態について説明したが、この発明は、これに限定されるものではなく、特許請求の範囲に記載された発明とその均等の範囲を含むものである。
以下、本願出願の特許請求の範囲に記載された発明を付記する。
【0050】
(付記)
請求項1に記載の発明は、
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置である。
【0051】
請求項2に記載の発明は、請求項1に記載のコード情報読取装置において、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とするコード情報読取装置である。
【0052】
請求項3に記載の発明は、請求項2に記載のコード情報読取装置において、
前記検索手段により検索された棚アドレスを表示する表示手段を更に備える、
ようにしたことを特徴とするコード情報読取装置である。
【0053】
請求項4に記載の発明は、請求項2に記載のコード情報読取装置において、
前記検索手段により検索された棚アドレスと前記読み取ったコード情報とを対応付けて記憶管理する読取結果記憶手段を更に備える、
ようにしたことを特徴とするコード情報読取装置である。
【0054】
請求項5に記載の発明は、請求項1記載のコード情報読取装置において、
当該装置本体の高度情報を取得する高度取得手段を更に備え、
前記算出手段は、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報のほか、前記高度取得手段により取得した高度情報に基づいて3次元座標系における前記コード情報の位置情報を算出する、
ようにしたことを特徴とするコード情報読取装置である。
【0055】
請求項6に記載の発明は、請求項5記載のコード情報読取装置において、
前記位置取得手段は、当該装置本体の位置情報として経緯度情報と共にその海抜高度情報を取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0056】
請求項7に記載の発明は、請求項1記載のコード情報読取装置において、
前記距離取得手段は、コード情報を読み取るイメージセンサに備えられているオートフォーカス機能によって計測された前記コード情報までの距離情報を取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0057】
請求項8に記載の発明は、請求項1記載のコード情報読取装置において、
前記方向取得手段は、当該装置本体の方向として水平方向の方向と共に垂直方向の方向を検出して取得する、
ようにしたことを特徴とするコード情報読取装置である。
【0058】
請求項9に記載の発明は、
物品に付されたコード情報を読み取るコード情報読取装置と、各種物品に関する情報を記憶管理する管理装置とが通信接続されている物品管理システムであって、
前記コード情報読取装置を構成する装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
前記装置本体の位置情報を取得する位置取得手段と、
前記装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取った際に前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とする物品管理システムである。
【0059】
請求項10に記載の発明は、請求項9記載の物品管理システムにおいて、
前記コード情報読取装置は、前記距離取得手段、前記位置取得手段、前記方向取得手段のほか、前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報を前記管理装置に送信する送信手段を備え、
前記管理装置は、
前記算出手段のほかに、前記コード情報読取装置から前記距離情報、位置情報、方向情報を受信する受信手段を備える、
ようにしたことを特徴とする物品管理システムである。
【0060】
請求項11に記載の発明は、請求項9記載の物品管理システムにおいて、
前記管理装置は、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする物品管理システムである。
【0061】
請求項12に記載の発明は、
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【符号の説明】
【0062】
1 コード読取装置(スキャナ装置)
2 管理装置(サーバ装置)
4 構内データベース
11 CPU
13 記憶部
14 表示部
15 操作部
16 イメージスキャナ
17 GPS部
18 地磁気センサ部
19 LAN通信部
M1 プログラムメモリ
M2 読取結果メモリ
M3 棚情報テーブル
【特許請求の範囲】
【請求項1】
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置。
【請求項2】
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項3】
前記検索手段により検索された棚アドレスを表示する表示手段を更に備える、
ようにしたことを特徴とする請求項2記載のコード情報読取装置。
【請求項4】
前記検索手段により検索された棚アドレスと前記読み取ったコード情報とを対応付けて記憶管理する読取結果記憶手段を更に備える、
ようにしたことを特徴とする請求項2記載のコード情報読取装置。
【請求項5】
当該装置本体の高度情報を取得する高度取得手段を更に備え、
前記算出手段は、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報のほか、前記高度取得手段により取得した高度情報に基づいて3次元座標系における前記コード情報の位置情報を算出する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項6】
前記位置取得手段は、当該装置本体の位置情報として経緯度情報と共にその海抜高度情報を取得する、
ようにしたことを特徴とする請求項5記載のコード情報読取装置。
【請求項7】
前記距離取得手段は、コード情報を読み取るイメージセンサに備えられているオートフォーカス機能によって計測された前記コード情報までの距離情報を取得する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項8】
前記方向取得手段は、当該装置本体の方向として水平方向の方向と共に垂直方向の方向を検出して取得する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項9】
物品に付されたコード情報を読み取るコード情報読取装置と、各種物品に関する情報を記憶管理する管理装置とが通信接続されている物品管理システムであって、
前記コード情報読取装置を構成する装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
前記装置本体の位置情報を取得する位置取得手段と、
前記装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取った際に前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とする物品管理システム。
【請求項10】
前記コード情報読取装置は、前記距離取得手段、前記位置取得手段、前記方向取得手段のほか、前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報を前記管理装置に送信する送信手段を備え、
前記管理装置は、
前記算出手段のほかに、前記コード情報読取装置から前記距離情報、位置情報、方向情報を受信する受信手段を備える、
ようにしたことを特徴とする請求項9記載の物品管理システム。
【請求項11】
前記管理装置は、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする請求項9記載の物品管理システム。
【請求項12】
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【請求項1】
物品に付されたコード情報を読み取るコード情報読取装置であって、
当該装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
当該装置本体の位置情報を取得する位置取得手段と、
当該装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とするコード情報読取装置。
【請求項2】
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項3】
前記検索手段により検索された棚アドレスを表示する表示手段を更に備える、
ようにしたことを特徴とする請求項2記載のコード情報読取装置。
【請求項4】
前記検索手段により検索された棚アドレスと前記読み取ったコード情報とを対応付けて記憶管理する読取結果記憶手段を更に備える、
ようにしたことを特徴とする請求項2記載のコード情報読取装置。
【請求項5】
当該装置本体の高度情報を取得する高度取得手段を更に備え、
前記算出手段は、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報のほか、前記高度取得手段により取得した高度情報に基づいて3次元座標系における前記コード情報の位置情報を算出する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項6】
前記位置取得手段は、当該装置本体の位置情報として経緯度情報と共にその海抜高度情報を取得する、
ようにしたことを特徴とする請求項5記載のコード情報読取装置。
【請求項7】
前記距離取得手段は、コード情報を読み取るイメージセンサに備えられているオートフォーカス機能によって計測された前記コード情報までの距離情報を取得する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項8】
前記方向取得手段は、当該装置本体の方向として水平方向の方向と共に垂直方向の方向を検出して取得する、
ようにしたことを特徴とする請求項1記載のコード情報読取装置。
【請求項9】
物品に付されたコード情報を読み取るコード情報読取装置と、各種物品に関する情報を記憶管理する管理装置とが通信接続されている物品管理システムであって、
前記コード情報読取装置を構成する装置本体から読取対象である前記コード情報までの距離情報を取得する距離取得手段と、
前記装置本体の位置情報を取得する位置取得手段と、
前記装置本体の方向情報を取得する方向取得手段と、
前記コード情報を読み取った際に前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報に基づいて前記コード情報の位置情報を算出する算出手段と、
を備えるようにしたことを特徴とする物品管理システム。
【請求項10】
前記コード情報読取装置は、前記距離取得手段、前記位置取得手段、前記方向取得手段のほか、前記コード情報を読み取る場合に、前記距離取得手段から取得した距離情報、前記位置取得手段により取得した位置情報、前記方向取得手段により取得した方向情報を前記管理装置に送信する送信手段を備え、
前記管理装置は、
前記算出手段のほかに、前記コード情報読取装置から前記距離情報、位置情報、方向情報を受信する受信手段を備える、
ようにしたことを特徴とする請求項9記載の物品管理システム。
【請求項11】
前記管理装置は、
棚に配置されている物品の配置位置を示す棚位置情報とその配置位置に割り当てられている棚アドレスとを対応付けて記憶する棚情報記憶手段と、
前記算出手段により算出された前記コード情報の位置情報に基づいて前記棚情報記憶手段を検索する検索手段と、
を更に備え、
前記検索手段により前記コード情報の位置情報に該当する棚アドレスを特定する、
ようにしたことを特徴とする請求項9記載の物品管理システム。
【請求項12】
コンピュータに対して、
物品に付されたコード情報を読み取る機能と、
装置本体から読取対象である前記コード情報までの距離情報を取得する機能と、
前記装置本体の位置情報を取得する機能と、
前記装置本体の方向情報を取得する機能と、
前記コード情報を読み取る場合に、前記取得した距離情報、前記取得した位置情報、前記取得した方向情報に基づいて前記コード情報の位置情報を算出する機能と、
を実現させるためのプログラム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−162341(P2012−162341A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−22527(P2011−22527)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]