
コーマ機のデタッチングローラ用の駆動装置
本発明は、コーマ機のデタッチングローラ(A1,A2)のための間断的な運動を形成する駆動装置であって、該デタッチングローラ(A1,A2)は、駆動手段(Z1,Z2,Z3)を介して、差動歯車装置(1)の駆動シャフト(9)と結合されており、該差動歯車装置(1)の、回動可能に支承された枠体(2)が、一定の回転数で駆動される少なくとも1つの駆動要素(20,Z)を介して駆動され、差動歯車装置(1)は、第2の伝動装置段(G2)を備えており、該第2の伝動装置段(G2)は、出力シャフト(9)に回動不能に取り付けられた太陽歯車(S2)と、前記枠体(2)内でシャフト(33,34,35)を介して回動可能に支承された遊星歯車(U4,U5,U6)とから形成されており、第1の伝動装置段(G1)が設けられており、該第1の伝動装置段(G1)は、遊星歯車(U1,U2,U3)を備えており、該遊星歯車(U1,U2,U3)は、それぞれ第2の伝動装置段(G2)の遊星歯車(U4,U5,U6)に対して同軸に配置されていて、前記シャフト(33,34,35)に回動不能に取り付けられていて、別の太陽歯車(S1)と駆動結合されており、該別の太陽歯車(S1)は、回動可能に支承された駆動シャフト(5)に回動不能に取り付けられており、該駆動シャフト(5)は、駆動ユニット(4,G3)により不均一の回動運動で駆動されるものに関する。及ぼされる回転モーメントを低減しつつデタッチングローラの運動曲線を最適化するために、駆動ユニットは、非円形の歯車(42,43)を備えた伝動装置段(G3)から形成されており、該伝動装置段(G3)は、主駆動装置(HA)の均一の回動運動を不均一の回動運動に変換する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の、コーマ機のデタッチングローラの間断的な運動を形成する駆動装置に関する。
【0002】
コーマ機におけるデタッチング工程およびピーシング工程(くしけずられたフリースの後端に新たなフリースの先端を押し付けて重ね合わせる工程)のために、デタッチングローラは、間断的な運動を行う。すなわち、後続のデタッチング工程のまえに、既に形成されたフリースが、所定量だけニッパ装置に向かって戻され、新たな繊維群がフリースの後端と結合される。デタッチングローラの間断的な運動(順方向に運動する間に周期的に逆方向に運動するような運動)を形成するために、特別な駆動装置が要求される。その際、新たな繊維群のデタッチング(引き抜き、引き離し)時点やデタッチングローラのデタッチング速度は、所望の重ね合わせ箇所もしくは質的に均一のフリースを得るために精確に、ニッパ運動およびコーマシリンダ運動に適合させる必要がある。
【0003】
ドイツ連邦共和国特許出願公開第1685575号明細書において、差動歯車装置を用いて運動を形成する1つの構成が記載されている。そこでは、差動歯車装置の枠体(枠体に太陽歯車が回動可能に支承されている)が、均一に駆動される歯車を介して駆動され、歯車は、枠体と結合された枠体用の車と駆動結合される。その際、歯車は、コーマシリンダの駆動シャフトに回動不能に被せ嵌められている。被駆動の枠体内で、複数の遊星歯車が回動可能に支承されており、遊星歯車は、それぞれ太陽歯車と噛み合っている。リンク式伝動装置と結合された偏心駆動装置を介して、差動歯車装置軸ひいては差動歯車軸と結合された第1の太陽歯車に、不均一の運動が伝達される。不均一の運動に、前述の均一の駆動運動が重畳され、デタッチングローラのための所望の間断的な運動が形成される。この伝動装置の構成は長年実証されてきたものであるが、生じる高い加速力を受容するために、煩雑で頑丈な構造が要求される。さらにリンク式伝動装置内の各ジョイント部に摩擦力が形成され、摩擦力に起因して、要求される出力を高める必要がある。コーマ動作数に関して常により高い要求が課せられるので、伝動装置のこのような構造は、いつかはその耐性において限界に達する。さらにデタッチングローラの運動曲線における自由度は、公知のリンク式伝動装置の使用により制限されている。
【0004】
既に、別の手段と伝動装置ユニットとを用いて間断的な運動を実現する別の提案も成されている。たとえばデタッチングローラを、直に単数または複数の電動モータを介して駆動することが提案されている。このような構成は、たとえば欧州特許公開第374723号明細書において看取される。さらに米国特許第3604063号明細書において、可変の伝動装置ユニットが公知であり、そこでは所望の間断的な運動を得るために、特別なカム伝動装置ユニットが用いられている。
【0005】
米国特許第1818555号明細書において、非円形の歯車を備えた差動歯車装置を使用して駆動軸の一定の回動運動を間断的な運動に変換する構成が開示されている。この間断的な運動は、太陽歯車と結合された出力シャフトと後続の伝動装置段とを介して、デタッチングローラに伝達される。
【0006】
さらに中国特許出願公開第200710022458号明細書において、前掲米国特許第1818555号明細書と同様に、非円形の歯車を備えた伝動装置段を有する差動歯車装置の使用を提案する装置が記載されている。米国特許第1818555号明細書との唯一の相違点によれば、枠体の駆動が外側の枠体用の車を介して行われる。これに対して米国特許第1818555号明細書の構成では、枠体の駆動は、中央のシャフトを介して行われる。
【0007】
米国特許第1818555号明細書および中国特許出願公開第200710022458号明細書の構成では、使用される、非円形の歯車を備えた伝動装置段に基づいて、相応の間断的な運動が達成されるが、このような構成は、機構的に2つ以上の遊星歯車を用いることができないので、高い出力ひいては高い回転モーメントの伝達に関して制限されたものである。さらにデタッチングローラの駆動運動の調整は、前掲米国特許第1818555号明細書における構成に対して制限されている。
【0008】
本発明の課題は、公知の構成を改善して、一方では従来必要とされた回転モーメント(出力)を低減し、同時にデタッチングローラの運動曲線の構成において自由度が高められた、デタッチングローラを駆動するための装置を提供することである。
【0009】
すなわち、回転モーメントによる負荷を低減しつつ、デタッチングローラの最適な運動曲線が得られるようにすることである。
【0010】
この課題を解決するために、本発明によれば、差動歯車装置の第1の伝動装置段の太陽歯車用の駆動ユニットが、非円形の歯車を備えた伝動装置段から形成されており、伝動装置段は、主駆動装置の均一の回動運動を不均一の回動運動に変換する。公知の、偏心駆動装置と結合されたリンク式伝動装置の使用の代わりに、提案された、非円形の歯車を備えた伝動装置段を有する伝動装置の使用により、従来の実証された駆動構造を維持することができる。同時に非円形の歯車を備えた伝動装置段の提案された使用により、駆動に係る負荷の低減ならびにデタッチングローラの運動曲線の適合に関して、公知ではない最適化を実現することができる。さらに枠体のための駆動要素が、駆動シャフトから形成されており、駆動シャフトに、歯車が、回動不能に取り付けられており、歯車は、差動歯車装置の枠体の枠体用の車と、直接または間接に駆動結合されている。「間接」という表現には、たとえば要求される回転方向を枠体に伝達するために、駆動シャフトに取り付けられた歯車と枠体用の車との間に介在された中間車が含まれる。
【0011】
別の態様によれば、駆動シャフトが、別の駆動車を備えており、駆動車は、主駆動装置の駆動要素と駆動結合されており、駆動要素は、同時に、非円形の歯車を備えた伝動装置段と駆動結合されている。これにより、両方の駆動経路が、別の駆動要素を介在することなく、主駆動装置の同じ駆動要素により受容されるので、両方の駆動経路の同期化が保証される。
【0012】
さらに別の態様によれば、主駆動装置の駆動要素が、機械フレームに回動可能に支承された歯車から形成されており、歯車は、別の手段を介して、中央の駆動モータ(主駆動装置)により駆動され、歯車の回動軸が、非円形の歯車を備えた伝動装置段の入力シャフトに対して同軸に延在しており、駆動シャフトの別の駆動車が、歯車として形成されており、歯車は、主駆動装置の歯車と駆動結合されている。さらにまた主駆動装置の歯車が直に非円形の歯車を備えた伝動装置段の入力シャフトに取り付けられた態様も考えられる。
【0013】
調節性を得るため、特にニッパ運動に対するデタッチングローラのデタッチング時点を調節するために、伝動装置段の入力シャフトは、着脱可能な取付手段を介して、主駆動装置の歯車と回動不能に結合されている。その際、取付手段はガイドを備えており、ガイドは、取付手段が緩んだ状態で、入力シャフトと主駆動装置の歯車との間の回動角度の調節を許容する。したがってデタッチングローラの運動サイクルをニッパ運動に対して変位させることができる。ニッパの駆動装置も同様に主駆動装置と連結されている。
【0014】
選択的に、歯車が、取付手段を介して、駆動シャフトに着脱可能に取り付けられており、駆動シャフトと歯車との間の角度位置が手段を介して調節可能である構成により、デタッチングローラの運動サイクルの変位が得られる。
【0015】
デタッチングローラの運動サイクルを調節するために、選択的に別の態様を用いてもよく、そこでは、枠体用の車が、差動歯車装置の枠体に、手段を介して着脱可能に取り付けられていて、枠体の周方向にみて、調節手段を介して、枠体に対する角度位置で調節可能である。
【0016】
本発明の別の利点は、以下の、発明を実施するための形態の説明から判る。
【図面の簡単な説明】
【0017】
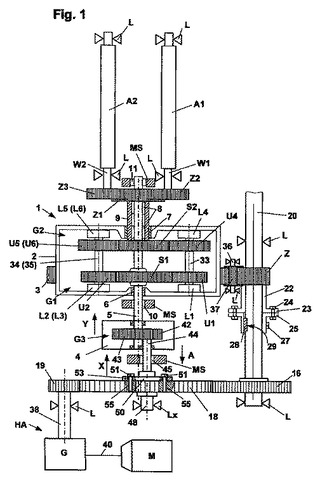
【図1】本発明に従って形成された駆動装置の概略断面図である。
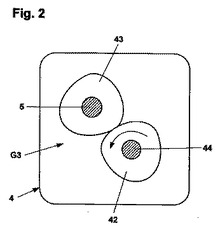
【図2】図1のX方向にみた、非円形の歯車を備えた伝動装置を示す側面図である。
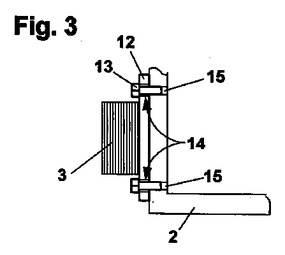
【図3】差動歯車装置の枠体用の車を固定しかつ調節するための1つの実施の形態を示す、図1の拡大部分図である。
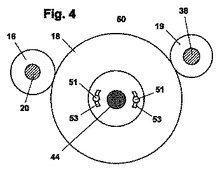
【図4】図1のA方向にみた駆動歯車18を示す図である。
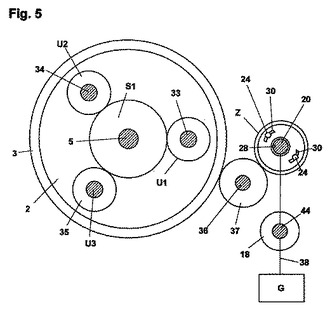
【図5】図1のY方向にみた差動歯車装置を示す図である。
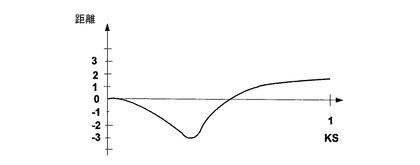
【図6】コーマ動作中のデタッチングローラ運動の曲線経過を示す線図である。
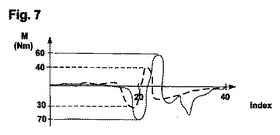
【図7】コーマ動作中のデタッチングローラ用の駆動装置の回転モーメントの大きさを示す線図である。
【0018】
図1には、回転する枠体(Steg)2を備えた差動歯車装置1を示す。枠体2は、片側で軸受6に回動可能に支承されている。軸受6は、中央のシャフト5に支持されており、シャフト5は、本実施の形態では、軸受10,11を介して機械フレームMSに回動可能に支承されている。別の片側で、枠体2は、軸受7に回動可能に支承されている。軸受7は、中空シャフト9に支持されており、中空シャフト9は、概略的に示す軸受8を介して前述のシャフト5に支持されている。もちろんこれに関して多くの異形の軸受構成も考えられる。回転する枠体2は、枠体用の車3を備えており、枠体用の車3は、枠体と固く結合されている。図3の拡大図において別の態様を示しており、そこでは枠体用の車3は、突出する基本体12を備えている。基本体12の、枠体用の車から突出する部分に、両側で、縦長のスリット14が設けられており、スリット14の長手延伸部は、枠体2の周方向に延びている。スリット14を通って、単数または複数のねじ13が突出しており、ねじ13は、枠体2のねじ山付孔15に取り付けられている。ねじ13の緊締により、枠体用の車3は、枠体2に対して固定される。ねじ13(複数のねじ13が枠体2の周に沿って分配して設けられている)を緩めると、枠体用の車3は、枠体2に対して所定の値だけ周方向に回動することができ、これにより枠体に対する角度位置が変化する。これによりニッパ装置(図示していない)に対するデタッチングローラのデタッチング位置の姿勢に関する調節が形成される。これについてはあとで詳しく説明する。
【0019】
中間車37を介して、枠体用の車3と歯車Zが噛み合い、駆動結合されている。概略的に示すように、中間車37は、軸36を介して、軸受Lにおいて回動可能に機械フレームに支承されている。歯車Zは、支承箇所Lを介して機械フレームに支承された駆動シャフト20に回動不能に(駆動シャフト20に対して回動不能に、つまり一緒に回動するように)取り付けられている。歯車Zに対して間隔を置いて、別の歯車16が、駆動シャフト20に取り付けられており、別の歯車16は、主駆動装置HAの歯車18と駆動結合されている。その際、軸48を介して支承部Lxにおいて機械フレームに支承された歯車18は、歯車19により駆動され、歯車19は、シャフト38を介して中央の伝動装置ユニットGと駆動結合されている。伝動装置ユニットGの駆動は、モータMから出発して、概略的に示す駆動結合部40を介して行われる。もちろんこのような構成は、駆動装置の多数の態様の1つに過ぎない。たとえば図示の歯車対の代わりにベルト式駆動装置を設けることも考えられる。
【0020】
図3に示す調節に対して選択的に、図1に示すような調節装置を設けてもよい。その際、歯車Zは中空シャフト22と結合されており、中空シャフト22は、フランジ23を備えていて、駆動シャフト20に対して同軸的に延びている。フランジ23に、フランジ25が対向しており、フランジ25も同様に、シャフト20に対して同軸に延びていて、ばね28(ばね28はシャフト20の溝29に突入する)を介してシャフト20と回動不能に結合されている。フランジ25の軸方向の摺動を防止するために、フランジは、概略的に示すねじ27により固定されている。概略的に示すねじ結合部24を介して、両方のフランジ23,25は相互に固定されている。したがって歯車Zは、シャフト20に回動不能に固定されている。図5(図1のY方向にみた図である)から看取されるように、ねじ結合部24の付近に長孔30が設けられており、長孔30を介して、ねじ結合部24を緩めると、歯車Zとシャフト20との間の角度位置を変化させることができる。このような装置により、ニッパ装置の位置に関するデタッチングローラのデタッチング時点の変位が実現される。
【0021】
デタッチングローラA1,A2の駆動は、一方では、均一に駆動される歯車Zを介して行われ、歯車Zは、中間車37を介して枠体2の枠体用の車3を回動させる。この回動により、枠体2と結合された軸受収容部L1〜L6も運動させられ、軸受収容部L1〜L6に、シャフト33,34,35を介して遊星歯車U1〜U6が回動可能に支承されている。ここでは、遊星歯車U1〜U3(図1参照)は、太陽歯車S1と駆動結合されており、太陽歯車S1は、シャフト5に回動不能に取り付けられている。
【0022】
差動歯車装置1の第2の伝動装置段G2の太陽歯車S2は、回動可能に支承された中空シャフト9と固く結合されており、中空シャフト9は、前述のように、軸受8を介して、回動可能に支承されたシャフト5に支持されている。太陽歯車S2と、周に沿って分配され枠体2に支承された遊星歯車U4〜U6が駆動結合されている。遊星歯車U4〜U6は、シャフト33,34,35を介して、遊星歯車U1〜U3と結合されている。
【0023】
中空シャフト9の反対側の端部に、歯車Z1が固定されており、歯車Z1は、歯車Z2,Z3と駆動結合されている。歯車Z2,Z3は、シャフトW1,W2を介してデタッチングローラA1,A2と結合されている。デタッチングローラA1,A2もしくはシャフトW1,W2は、概略的に示す軸受Lを介して機械フレームMSに支承されている。
【0024】
シャフト5に太陽歯車S1が取り付けられており、シャフト5は、同時に、差動歯車機構1の手前に設けられた、非円形の歯車42,43を備えた伝動装置段G3の出力シャフトであり、歯車42,43は、ハウジング4の内側で相互に噛み合っている。非円形の歯車43は、シャフト5に回動不能に取り付けられている。非円形の歯車42は、シャフト44に回動不能に取り付けられており、シャフト44の別の端部にフランジ50が取り付けられており、フランジ50を介して、シャフト44は、ねじ51を用いて主駆動装置HAの歯車18と固く結合されている。シャフト44は、概略的に示すように、軸受45を介して機械フレームMSに回動可能に支承されている。もちろん別の支承箇所を設けてもよい。さらにシャフト5およびシャフト44用の支承箇所をハウジング4の内側に設けてもよく、これについては図1に概略的に示す。
【0025】
ねじ51は、フランジ50の長孔53(図1の方向Aにみた図4参照)を通って突出していて、歯車18に設けられたねじ山付孔55に収容されている。歯車18は、軸48を介して軸受Lxにおいて機械フレームに回動可能に支承されている。その際、シャフト44の回動軸線と軸48とは、相互に軸平行に延びている。歯車18の均一の駆動は、前述のように、歯車19を介して行われ、歯車19は、シャフト38を介して伝動装置Gと結合されており、伝動装置Gは、駆動モータMにより均一の回転数で駆動される。
【0026】
図3および図5に示す調節装置の代わりに、図4に示すような、デタッチングローラの運動曲線を調節するための調節装置を設けてもよい。ねじ51を緩めると、フランジ50は、長孔53に沿って、規定の回動角度で回動することができ、次いで新たな姿勢で再びねじ51の締付により固定することができる。フランジと歯車18との間にマーク(図示していない)を設けてもよく、マークを介して、相応に調節を規定することができる。このような調節により、作業シリンダの運動曲線は、同様に主駆動装置HAにより駆動されるニッパ装置の運動曲線に対して変位させることができる。図6に、そのような作業ローラの運動曲線を例示しており、作業ローラの運動曲線は、コーマ動作(タフトのコーミングおよび引き抜き)KSの変化を示している。第1の範囲では、作業ローラは、後退運動を行い、これにより既に形成されたフリースは、ニッパ装置に向かって後退搬送される。次いで逆転運動が行われ、作業ローラは、作業過程を行うために前進運動する。ゼロラインを超える値は、実際のフリースの搬送値を表している。
【0027】
このような調節により、特に作業ローラA1,A2のデタッチング時点が変化される。非円形の歯車42,43を備えた伝動装置段G3を介して、歯車18からシャフト44を介して受け取られる均一の回動運動は、非円形の歯車42に伝達される。この均一の回動運動は、係合する非円形の歯車43と協働して、伝動装置段G3において、不均一の回動運動に変換され、不均一の回動運動は、シャフト5を介して太陽歯車S1に伝達される。同時に、歯車18から、均一の回動運動が、歯車16を介してシャフト20に伝達され、したがって歯車Zに伝達される。歯車Zは、均一の回動運動を、中間車37と枠体用の車3とを介して、差動歯車装置1の枠体2に伝達し、これにより遊星歯車U1〜U3は、太陽歯車S1の周りを運動する。その際、結果として遊星歯車U1〜U3の不均一の回動運動が形成され、この不均一の回動運動は、遊星歯車U1〜U3により、該遊星歯車U1〜U3と結合された遊星歯車U4〜U6に伝達される。遊星歯車U4〜U6は、そのようにして形成される不均一の運動(間断的な運動)を太陽歯車S2に伝達し、太陽歯車S2は、この不均一の運動を、シャフト9と歯車Z1とを介して、デタッチングローラの歯車Z2,Z3に伝達する。
【0028】
伝動装置段G3の非円形の歯車42,43の適切な構成により、デタッチングローラの運動曲線(図6)の経過を最適化することができるので、駆動に係る負荷もしくは及ぼされる回転モーメントを、図7の線図に示すように、大幅に低減することができる。そこでは回転モーメントM(Nm)の変化は、40の指数(Index)に分割したコーマ動作に関して示す。実線で示す曲線は、従来の駆動構造において存在する回転モーメントの経過を示している。破線で示す曲線は、本発明による、非円形の歯車を備えた駆動ユニットを使用して得られた回転モーメントの経過を示している。これにより回転モーメントによる負荷は、正側でも負側でも大幅に低減することができる。結果として駆動要素の負荷が僅かになり、機械要素の過負荷なくコーマ動作数を高くすることができる。
【0029】
差動伝動装置の第1の太陽歯車を不均一に駆動するための、非円形の歯車を備えたこのような伝動装置段を使用することにより、この伝動装置段の自由な構造に基づいて、前述の利点を得るために、最適な駆動基準を実現することができる。
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の、コーマ機のデタッチングローラの間断的な運動を形成する駆動装置に関する。
【0002】
コーマ機におけるデタッチング工程およびピーシング工程(くしけずられたフリースの後端に新たなフリースの先端を押し付けて重ね合わせる工程)のために、デタッチングローラは、間断的な運動を行う。すなわち、後続のデタッチング工程のまえに、既に形成されたフリースが、所定量だけニッパ装置に向かって戻され、新たな繊維群がフリースの後端と結合される。デタッチングローラの間断的な運動(順方向に運動する間に周期的に逆方向に運動するような運動)を形成するために、特別な駆動装置が要求される。その際、新たな繊維群のデタッチング(引き抜き、引き離し)時点やデタッチングローラのデタッチング速度は、所望の重ね合わせ箇所もしくは質的に均一のフリースを得るために精確に、ニッパ運動およびコーマシリンダ運動に適合させる必要がある。
【0003】
ドイツ連邦共和国特許出願公開第1685575号明細書において、差動歯車装置を用いて運動を形成する1つの構成が記載されている。そこでは、差動歯車装置の枠体(枠体に太陽歯車が回動可能に支承されている)が、均一に駆動される歯車を介して駆動され、歯車は、枠体と結合された枠体用の車と駆動結合される。その際、歯車は、コーマシリンダの駆動シャフトに回動不能に被せ嵌められている。被駆動の枠体内で、複数の遊星歯車が回動可能に支承されており、遊星歯車は、それぞれ太陽歯車と噛み合っている。リンク式伝動装置と結合された偏心駆動装置を介して、差動歯車装置軸ひいては差動歯車軸と結合された第1の太陽歯車に、不均一の運動が伝達される。不均一の運動に、前述の均一の駆動運動が重畳され、デタッチングローラのための所望の間断的な運動が形成される。この伝動装置の構成は長年実証されてきたものであるが、生じる高い加速力を受容するために、煩雑で頑丈な構造が要求される。さらにリンク式伝動装置内の各ジョイント部に摩擦力が形成され、摩擦力に起因して、要求される出力を高める必要がある。コーマ動作数に関して常により高い要求が課せられるので、伝動装置のこのような構造は、いつかはその耐性において限界に達する。さらにデタッチングローラの運動曲線における自由度は、公知のリンク式伝動装置の使用により制限されている。
【0004】
既に、別の手段と伝動装置ユニットとを用いて間断的な運動を実現する別の提案も成されている。たとえばデタッチングローラを、直に単数または複数の電動モータを介して駆動することが提案されている。このような構成は、たとえば欧州特許公開第374723号明細書において看取される。さらに米国特許第3604063号明細書において、可変の伝動装置ユニットが公知であり、そこでは所望の間断的な運動を得るために、特別なカム伝動装置ユニットが用いられている。
【0005】
米国特許第1818555号明細書において、非円形の歯車を備えた差動歯車装置を使用して駆動軸の一定の回動運動を間断的な運動に変換する構成が開示されている。この間断的な運動は、太陽歯車と結合された出力シャフトと後続の伝動装置段とを介して、デタッチングローラに伝達される。
【0006】
さらに中国特許出願公開第200710022458号明細書において、前掲米国特許第1818555号明細書と同様に、非円形の歯車を備えた伝動装置段を有する差動歯車装置の使用を提案する装置が記載されている。米国特許第1818555号明細書との唯一の相違点によれば、枠体の駆動が外側の枠体用の車を介して行われる。これに対して米国特許第1818555号明細書の構成では、枠体の駆動は、中央のシャフトを介して行われる。
【0007】
米国特許第1818555号明細書および中国特許出願公開第200710022458号明細書の構成では、使用される、非円形の歯車を備えた伝動装置段に基づいて、相応の間断的な運動が達成されるが、このような構成は、機構的に2つ以上の遊星歯車を用いることができないので、高い出力ひいては高い回転モーメントの伝達に関して制限されたものである。さらにデタッチングローラの駆動運動の調整は、前掲米国特許第1818555号明細書における構成に対して制限されている。
【0008】
本発明の課題は、公知の構成を改善して、一方では従来必要とされた回転モーメント(出力)を低減し、同時にデタッチングローラの運動曲線の構成において自由度が高められた、デタッチングローラを駆動するための装置を提供することである。
【0009】
すなわち、回転モーメントによる負荷を低減しつつ、デタッチングローラの最適な運動曲線が得られるようにすることである。
【0010】
この課題を解決するために、本発明によれば、差動歯車装置の第1の伝動装置段の太陽歯車用の駆動ユニットが、非円形の歯車を備えた伝動装置段から形成されており、伝動装置段は、主駆動装置の均一の回動運動を不均一の回動運動に変換する。公知の、偏心駆動装置と結合されたリンク式伝動装置の使用の代わりに、提案された、非円形の歯車を備えた伝動装置段を有する伝動装置の使用により、従来の実証された駆動構造を維持することができる。同時に非円形の歯車を備えた伝動装置段の提案された使用により、駆動に係る負荷の低減ならびにデタッチングローラの運動曲線の適合に関して、公知ではない最適化を実現することができる。さらに枠体のための駆動要素が、駆動シャフトから形成されており、駆動シャフトに、歯車が、回動不能に取り付けられており、歯車は、差動歯車装置の枠体の枠体用の車と、直接または間接に駆動結合されている。「間接」という表現には、たとえば要求される回転方向を枠体に伝達するために、駆動シャフトに取り付けられた歯車と枠体用の車との間に介在された中間車が含まれる。
【0011】
別の態様によれば、駆動シャフトが、別の駆動車を備えており、駆動車は、主駆動装置の駆動要素と駆動結合されており、駆動要素は、同時に、非円形の歯車を備えた伝動装置段と駆動結合されている。これにより、両方の駆動経路が、別の駆動要素を介在することなく、主駆動装置の同じ駆動要素により受容されるので、両方の駆動経路の同期化が保証される。
【0012】
さらに別の態様によれば、主駆動装置の駆動要素が、機械フレームに回動可能に支承された歯車から形成されており、歯車は、別の手段を介して、中央の駆動モータ(主駆動装置)により駆動され、歯車の回動軸が、非円形の歯車を備えた伝動装置段の入力シャフトに対して同軸に延在しており、駆動シャフトの別の駆動車が、歯車として形成されており、歯車は、主駆動装置の歯車と駆動結合されている。さらにまた主駆動装置の歯車が直に非円形の歯車を備えた伝動装置段の入力シャフトに取り付けられた態様も考えられる。
【0013】
調節性を得るため、特にニッパ運動に対するデタッチングローラのデタッチング時点を調節するために、伝動装置段の入力シャフトは、着脱可能な取付手段を介して、主駆動装置の歯車と回動不能に結合されている。その際、取付手段はガイドを備えており、ガイドは、取付手段が緩んだ状態で、入力シャフトと主駆動装置の歯車との間の回動角度の調節を許容する。したがってデタッチングローラの運動サイクルをニッパ運動に対して変位させることができる。ニッパの駆動装置も同様に主駆動装置と連結されている。
【0014】
選択的に、歯車が、取付手段を介して、駆動シャフトに着脱可能に取り付けられており、駆動シャフトと歯車との間の角度位置が手段を介して調節可能である構成により、デタッチングローラの運動サイクルの変位が得られる。
【0015】
デタッチングローラの運動サイクルを調節するために、選択的に別の態様を用いてもよく、そこでは、枠体用の車が、差動歯車装置の枠体に、手段を介して着脱可能に取り付けられていて、枠体の周方向にみて、調節手段を介して、枠体に対する角度位置で調節可能である。
【0016】
本発明の別の利点は、以下の、発明を実施するための形態の説明から判る。
【図面の簡単な説明】
【0017】
【図1】本発明に従って形成された駆動装置の概略断面図である。
【図2】図1のX方向にみた、非円形の歯車を備えた伝動装置を示す側面図である。
【図3】差動歯車装置の枠体用の車を固定しかつ調節するための1つの実施の形態を示す、図1の拡大部分図である。
【図4】図1のA方向にみた駆動歯車18を示す図である。
【図5】図1のY方向にみた差動歯車装置を示す図である。
【図6】コーマ動作中のデタッチングローラ運動の曲線経過を示す線図である。
【図7】コーマ動作中のデタッチングローラ用の駆動装置の回転モーメントの大きさを示す線図である。
【0018】
図1には、回転する枠体(Steg)2を備えた差動歯車装置1を示す。枠体2は、片側で軸受6に回動可能に支承されている。軸受6は、中央のシャフト5に支持されており、シャフト5は、本実施の形態では、軸受10,11を介して機械フレームMSに回動可能に支承されている。別の片側で、枠体2は、軸受7に回動可能に支承されている。軸受7は、中空シャフト9に支持されており、中空シャフト9は、概略的に示す軸受8を介して前述のシャフト5に支持されている。もちろんこれに関して多くの異形の軸受構成も考えられる。回転する枠体2は、枠体用の車3を備えており、枠体用の車3は、枠体と固く結合されている。図3の拡大図において別の態様を示しており、そこでは枠体用の車3は、突出する基本体12を備えている。基本体12の、枠体用の車から突出する部分に、両側で、縦長のスリット14が設けられており、スリット14の長手延伸部は、枠体2の周方向に延びている。スリット14を通って、単数または複数のねじ13が突出しており、ねじ13は、枠体2のねじ山付孔15に取り付けられている。ねじ13の緊締により、枠体用の車3は、枠体2に対して固定される。ねじ13(複数のねじ13が枠体2の周に沿って分配して設けられている)を緩めると、枠体用の車3は、枠体2に対して所定の値だけ周方向に回動することができ、これにより枠体に対する角度位置が変化する。これによりニッパ装置(図示していない)に対するデタッチングローラのデタッチング位置の姿勢に関する調節が形成される。これについてはあとで詳しく説明する。
【0019】
中間車37を介して、枠体用の車3と歯車Zが噛み合い、駆動結合されている。概略的に示すように、中間車37は、軸36を介して、軸受Lにおいて回動可能に機械フレームに支承されている。歯車Zは、支承箇所Lを介して機械フレームに支承された駆動シャフト20に回動不能に(駆動シャフト20に対して回動不能に、つまり一緒に回動するように)取り付けられている。歯車Zに対して間隔を置いて、別の歯車16が、駆動シャフト20に取り付けられており、別の歯車16は、主駆動装置HAの歯車18と駆動結合されている。その際、軸48を介して支承部Lxにおいて機械フレームに支承された歯車18は、歯車19により駆動され、歯車19は、シャフト38を介して中央の伝動装置ユニットGと駆動結合されている。伝動装置ユニットGの駆動は、モータMから出発して、概略的に示す駆動結合部40を介して行われる。もちろんこのような構成は、駆動装置の多数の態様の1つに過ぎない。たとえば図示の歯車対の代わりにベルト式駆動装置を設けることも考えられる。
【0020】
図3に示す調節に対して選択的に、図1に示すような調節装置を設けてもよい。その際、歯車Zは中空シャフト22と結合されており、中空シャフト22は、フランジ23を備えていて、駆動シャフト20に対して同軸的に延びている。フランジ23に、フランジ25が対向しており、フランジ25も同様に、シャフト20に対して同軸に延びていて、ばね28(ばね28はシャフト20の溝29に突入する)を介してシャフト20と回動不能に結合されている。フランジ25の軸方向の摺動を防止するために、フランジは、概略的に示すねじ27により固定されている。概略的に示すねじ結合部24を介して、両方のフランジ23,25は相互に固定されている。したがって歯車Zは、シャフト20に回動不能に固定されている。図5(図1のY方向にみた図である)から看取されるように、ねじ結合部24の付近に長孔30が設けられており、長孔30を介して、ねじ結合部24を緩めると、歯車Zとシャフト20との間の角度位置を変化させることができる。このような装置により、ニッパ装置の位置に関するデタッチングローラのデタッチング時点の変位が実現される。
【0021】
デタッチングローラA1,A2の駆動は、一方では、均一に駆動される歯車Zを介して行われ、歯車Zは、中間車37を介して枠体2の枠体用の車3を回動させる。この回動により、枠体2と結合された軸受収容部L1〜L6も運動させられ、軸受収容部L1〜L6に、シャフト33,34,35を介して遊星歯車U1〜U6が回動可能に支承されている。ここでは、遊星歯車U1〜U3(図1参照)は、太陽歯車S1と駆動結合されており、太陽歯車S1は、シャフト5に回動不能に取り付けられている。
【0022】
差動歯車装置1の第2の伝動装置段G2の太陽歯車S2は、回動可能に支承された中空シャフト9と固く結合されており、中空シャフト9は、前述のように、軸受8を介して、回動可能に支承されたシャフト5に支持されている。太陽歯車S2と、周に沿って分配され枠体2に支承された遊星歯車U4〜U6が駆動結合されている。遊星歯車U4〜U6は、シャフト33,34,35を介して、遊星歯車U1〜U3と結合されている。
【0023】
中空シャフト9の反対側の端部に、歯車Z1が固定されており、歯車Z1は、歯車Z2,Z3と駆動結合されている。歯車Z2,Z3は、シャフトW1,W2を介してデタッチングローラA1,A2と結合されている。デタッチングローラA1,A2もしくはシャフトW1,W2は、概略的に示す軸受Lを介して機械フレームMSに支承されている。
【0024】
シャフト5に太陽歯車S1が取り付けられており、シャフト5は、同時に、差動歯車機構1の手前に設けられた、非円形の歯車42,43を備えた伝動装置段G3の出力シャフトであり、歯車42,43は、ハウジング4の内側で相互に噛み合っている。非円形の歯車43は、シャフト5に回動不能に取り付けられている。非円形の歯車42は、シャフト44に回動不能に取り付けられており、シャフト44の別の端部にフランジ50が取り付けられており、フランジ50を介して、シャフト44は、ねじ51を用いて主駆動装置HAの歯車18と固く結合されている。シャフト44は、概略的に示すように、軸受45を介して機械フレームMSに回動可能に支承されている。もちろん別の支承箇所を設けてもよい。さらにシャフト5およびシャフト44用の支承箇所をハウジング4の内側に設けてもよく、これについては図1に概略的に示す。
【0025】
ねじ51は、フランジ50の長孔53(図1の方向Aにみた図4参照)を通って突出していて、歯車18に設けられたねじ山付孔55に収容されている。歯車18は、軸48を介して軸受Lxにおいて機械フレームに回動可能に支承されている。その際、シャフト44の回動軸線と軸48とは、相互に軸平行に延びている。歯車18の均一の駆動は、前述のように、歯車19を介して行われ、歯車19は、シャフト38を介して伝動装置Gと結合されており、伝動装置Gは、駆動モータMにより均一の回転数で駆動される。
【0026】
図3および図5に示す調節装置の代わりに、図4に示すような、デタッチングローラの運動曲線を調節するための調節装置を設けてもよい。ねじ51を緩めると、フランジ50は、長孔53に沿って、規定の回動角度で回動することができ、次いで新たな姿勢で再びねじ51の締付により固定することができる。フランジと歯車18との間にマーク(図示していない)を設けてもよく、マークを介して、相応に調節を規定することができる。このような調節により、作業シリンダの運動曲線は、同様に主駆動装置HAにより駆動されるニッパ装置の運動曲線に対して変位させることができる。図6に、そのような作業ローラの運動曲線を例示しており、作業ローラの運動曲線は、コーマ動作(タフトのコーミングおよび引き抜き)KSの変化を示している。第1の範囲では、作業ローラは、後退運動を行い、これにより既に形成されたフリースは、ニッパ装置に向かって後退搬送される。次いで逆転運動が行われ、作業ローラは、作業過程を行うために前進運動する。ゼロラインを超える値は、実際のフリースの搬送値を表している。
【0027】
このような調節により、特に作業ローラA1,A2のデタッチング時点が変化される。非円形の歯車42,43を備えた伝動装置段G3を介して、歯車18からシャフト44を介して受け取られる均一の回動運動は、非円形の歯車42に伝達される。この均一の回動運動は、係合する非円形の歯車43と協働して、伝動装置段G3において、不均一の回動運動に変換され、不均一の回動運動は、シャフト5を介して太陽歯車S1に伝達される。同時に、歯車18から、均一の回動運動が、歯車16を介してシャフト20に伝達され、したがって歯車Zに伝達される。歯車Zは、均一の回動運動を、中間車37と枠体用の車3とを介して、差動歯車装置1の枠体2に伝達し、これにより遊星歯車U1〜U3は、太陽歯車S1の周りを運動する。その際、結果として遊星歯車U1〜U3の不均一の回動運動が形成され、この不均一の回動運動は、遊星歯車U1〜U3により、該遊星歯車U1〜U3と結合された遊星歯車U4〜U6に伝達される。遊星歯車U4〜U6は、そのようにして形成される不均一の運動(間断的な運動)を太陽歯車S2に伝達し、太陽歯車S2は、この不均一の運動を、シャフト9と歯車Z1とを介して、デタッチングローラの歯車Z2,Z3に伝達する。
【0028】
伝動装置段G3の非円形の歯車42,43の適切な構成により、デタッチングローラの運動曲線(図6)の経過を最適化することができるので、駆動に係る負荷もしくは及ぼされる回転モーメントを、図7の線図に示すように、大幅に低減することができる。そこでは回転モーメントM(Nm)の変化は、40の指数(Index)に分割したコーマ動作に関して示す。実線で示す曲線は、従来の駆動構造において存在する回転モーメントの経過を示している。破線で示す曲線は、本発明による、非円形の歯車を備えた駆動ユニットを使用して得られた回転モーメントの経過を示している。これにより回転モーメントによる負荷は、正側でも負側でも大幅に低減することができる。結果として駆動要素の負荷が僅かになり、機械要素の過負荷なくコーマ動作数を高くすることができる。
【0029】
差動伝動装置の第1の太陽歯車を不均一に駆動するための、非円形の歯車を備えたこのような伝動装置段を使用することにより、この伝動装置段の自由な構造に基づいて、前述の利点を得るために、最適な駆動基準を実現することができる。
【特許請求の範囲】
【請求項1】
コーマ機のデタッチングローラ(A1,A2)のための間断的な運動を形成する駆動装置であって、
該デタッチングローラ(A1,A2)は、駆動手段(Z1,Z2,Z3)を介して、差動歯車装置(1)の駆動シャフト(9)と結合されており、該差動歯車装置(1)の、回動可能に支承された枠体(2)が、一定の回転数で駆動される少なくとも1つの駆動要素(20,Z)を介して駆動され、差動歯車装置(1)は、第2の伝動装置段(G2)を備えており、該第2の伝動装置段(G2)は、出力シャフト(9)に回動不能に取り付けられた太陽歯車(S2)と、前記枠体(2)内でシャフト(33,34,35)を介して回動可能に支承された遊星歯車(U4,U5,U6)とから形成されており、第1の伝動装置段(G1)が設けられており、該第1の伝動装置段(G1)は、遊星歯車(U1,U2,U3)を備えており、該遊星歯車(U1,U2,U3)は、それぞれ第2の伝動装置段(G2)の遊星歯車(U4,U5,U6)に対して同軸に配置されていて、前記シャフト(33,34,35)に回動不能に取り付けられていて、別の太陽歯車(S1)と駆動結合されており、該別の太陽歯車(S1)は、回動可能に支承された駆動シャフト(5)に回動不能に取り付けられており、該駆動シャフト(5)は、駆動ユニット(4,G3)により不均一の回動運動で駆動されるものにおいて、
駆動ユニットは、非円形の歯車(42,43)を備えた伝動装置段(G3)から形成されており、該伝動装置段(G3)は、主駆動装置(HA)の均一の回動運動を不均一の回動運動に変換することを特徴とする、コーマ機のデタッチングローラのための間断的な運動を形成する駆動装置。
【請求項2】
枠体(2)のための駆動要素が、駆動シャフト(20)から形成されており、該駆動シャフト(20)に、歯車(Z)が、回動不能に取り付けられており、該歯車(Z)は、差動歯車装置(1)の枠体(2)の枠体用の車(3)と、直接または間接に駆動結合されている、請求項1記載の駆動装置。
【請求項3】
前記駆動シャフト(20)は、別の駆動車(16)を備えており、該駆動車(16)は、主駆動装置(HA)の駆動要素(18)と駆動結合されており、該駆動要素(18)は、同時に、非円形の歯車(42,43)を備えた伝動装置段(G3)と駆動結合されている、請求項2記載の駆動装置。
【請求項4】
主駆動装置(HA)の前記駆動要素は、機械フレーム(MS)に回動可能に支承された歯車(18)から形成されており、該歯車(18)は、別の手段(19,38,G,40)を介して、中央の駆動モータ(M)により駆動され、前記歯車(18)の回動軸(48)が、非円形の歯車(42,43)を備えた伝動装置段(G3)の入力シャフト(44)に対して同軸に延在しており、駆動シャフト(20)の別の駆動車が、歯車(16)として形成されており、該歯車(16)は、主駆動装置(HA)の前記歯車(18)と駆動結合されている、請求項3記載の駆動装置。
【請求項5】
非円形の歯車(42,43)を備えた伝動装置段(G3)の入力シャフト(44)は、着脱可能な取付手段(24)を介して、主駆動装置(HA)の前記歯車(18)と回動不能に結合されている、請求項4記載の駆動装置。
【請求項6】
前記取付手段(24)の付近にガイド(30)が設けられており、該ガイド(30)は、前記取付手段(24)が緩んだ状態で、前記入力シャフト(44)と前記主駆動装置(HA)の前記歯車(18)との間の回動角度の調節を許容する、請求項5記載の駆動装置。
【請求項7】
前記歯車(Z)は、取付手段(22,23,24)を介して、前記駆動シャフト(20)に着脱可能に取り付けられており、該駆動シャフト(20)と前記歯車(Z)との間の角度位置が、手段(30,24)を介して調節可能である、請求項2記載の駆動装置。
【請求項8】
前記枠体用の車(3)は、前記差動歯車装置(1)の前記枠体(2)に、手段(13)を介して着脱可能に取り付けられていて、該枠体(2)の周方向にみて、調節手段(12,14)を介して、該枠体(2)に対する角度位置で調節可能である、請求項2記載の駆動装置。
【請求項1】
コーマ機のデタッチングローラ(A1,A2)のための間断的な運動を形成する駆動装置であって、
該デタッチングローラ(A1,A2)は、駆動手段(Z1,Z2,Z3)を介して、差動歯車装置(1)の駆動シャフト(9)と結合されており、該差動歯車装置(1)の、回動可能に支承された枠体(2)が、一定の回転数で駆動される少なくとも1つの駆動要素(20,Z)を介して駆動され、差動歯車装置(1)は、第2の伝動装置段(G2)を備えており、該第2の伝動装置段(G2)は、出力シャフト(9)に回動不能に取り付けられた太陽歯車(S2)と、前記枠体(2)内でシャフト(33,34,35)を介して回動可能に支承された遊星歯車(U4,U5,U6)とから形成されており、第1の伝動装置段(G1)が設けられており、該第1の伝動装置段(G1)は、遊星歯車(U1,U2,U3)を備えており、該遊星歯車(U1,U2,U3)は、それぞれ第2の伝動装置段(G2)の遊星歯車(U4,U5,U6)に対して同軸に配置されていて、前記シャフト(33,34,35)に回動不能に取り付けられていて、別の太陽歯車(S1)と駆動結合されており、該別の太陽歯車(S1)は、回動可能に支承された駆動シャフト(5)に回動不能に取り付けられており、該駆動シャフト(5)は、駆動ユニット(4,G3)により不均一の回動運動で駆動されるものにおいて、
駆動ユニットは、非円形の歯車(42,43)を備えた伝動装置段(G3)から形成されており、該伝動装置段(G3)は、主駆動装置(HA)の均一の回動運動を不均一の回動運動に変換することを特徴とする、コーマ機のデタッチングローラのための間断的な運動を形成する駆動装置。
【請求項2】
枠体(2)のための駆動要素が、駆動シャフト(20)から形成されており、該駆動シャフト(20)に、歯車(Z)が、回動不能に取り付けられており、該歯車(Z)は、差動歯車装置(1)の枠体(2)の枠体用の車(3)と、直接または間接に駆動結合されている、請求項1記載の駆動装置。
【請求項3】
前記駆動シャフト(20)は、別の駆動車(16)を備えており、該駆動車(16)は、主駆動装置(HA)の駆動要素(18)と駆動結合されており、該駆動要素(18)は、同時に、非円形の歯車(42,43)を備えた伝動装置段(G3)と駆動結合されている、請求項2記載の駆動装置。
【請求項4】
主駆動装置(HA)の前記駆動要素は、機械フレーム(MS)に回動可能に支承された歯車(18)から形成されており、該歯車(18)は、別の手段(19,38,G,40)を介して、中央の駆動モータ(M)により駆動され、前記歯車(18)の回動軸(48)が、非円形の歯車(42,43)を備えた伝動装置段(G3)の入力シャフト(44)に対して同軸に延在しており、駆動シャフト(20)の別の駆動車が、歯車(16)として形成されており、該歯車(16)は、主駆動装置(HA)の前記歯車(18)と駆動結合されている、請求項3記載の駆動装置。
【請求項5】
非円形の歯車(42,43)を備えた伝動装置段(G3)の入力シャフト(44)は、着脱可能な取付手段(24)を介して、主駆動装置(HA)の前記歯車(18)と回動不能に結合されている、請求項4記載の駆動装置。
【請求項6】
前記取付手段(24)の付近にガイド(30)が設けられており、該ガイド(30)は、前記取付手段(24)が緩んだ状態で、前記入力シャフト(44)と前記主駆動装置(HA)の前記歯車(18)との間の回動角度の調節を許容する、請求項5記載の駆動装置。
【請求項7】
前記歯車(Z)は、取付手段(22,23,24)を介して、前記駆動シャフト(20)に着脱可能に取り付けられており、該駆動シャフト(20)と前記歯車(Z)との間の角度位置が、手段(30,24)を介して調節可能である、請求項2記載の駆動装置。
【請求項8】
前記枠体用の車(3)は、前記差動歯車装置(1)の前記枠体(2)に、手段(13)を介して着脱可能に取り付けられていて、該枠体(2)の周方向にみて、調節手段(12,14)を介して、該枠体(2)に対する角度位置で調節可能である、請求項2記載の駆動装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−515851(P2012−515851A)
【公表日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2011−546560(P2011−546560)
【出願日】平成22年1月15日(2010.1.15)
【国際出願番号】PCT/CH2010/000011
【国際公開番号】WO2010/083618
【国際公開日】平成22年7月29日(2010.7.29)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
【公表日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年1月15日(2010.1.15)
【国際出願番号】PCT/CH2010/000011
【国際公開番号】WO2010/083618
【国際公開日】平成22年7月29日(2010.7.29)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
[ Back to top ]