
ゴニオメータ
【課題】測定ヘッド下の検出器以外、クレードル(円弧)又はその他の構造体がなく、測定距離は、ソフトウェアにより自由に選択可能であり、ほとんどの部品が購入できるくらいに簡易な設計のため、複雑、不正確、さらにコスト高な構造を避けることができるゴニオメータを提供する。
【解決の手段】ゴニオメータ(1)は、応力測定及び粒子の微細構造の特定を行い、フレーム(4)と、測定位置(31)において測定を実行するため、第1の線形移動装置(5)、第2の線形移動装置(6)及び傾動装置(16)により移動可能にフレーム(4)に設けられた測定ヘッド(7,8,9,10)とを備え、傾動装置(16)の回転軸(12)が測定位置(31)に一致せず、測定中に、前記移動装置(5,6,16)により、測定ヘッド(7,8,9,10)の円弧形(30)の移動を作り出す手段を備えることを特徴とする。
【解決の手段】ゴニオメータ(1)は、応力測定及び粒子の微細構造の特定を行い、フレーム(4)と、測定位置(31)において測定を実行するため、第1の線形移動装置(5)、第2の線形移動装置(6)及び傾動装置(16)により移動可能にフレーム(4)に設けられた測定ヘッド(7,8,9,10)とを備え、傾動装置(16)の回転軸(12)が測定位置(31)に一致せず、測定中に、前記移動装置(5,6,16)により、測定ヘッド(7,8,9,10)の円弧形(30)の移動を作り出す手段を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はゴニオメータに関する。
【背景技術】
【0002】
本発明は、応力測定及び微細構造の特定用の持ち移動式ゴニオメータ、又はいわゆる回折装置と呼ばれるものである。移動式とする主な目的は、クランクシャフト、パイプライン、橋などの大きな部品又は構造体の測定を可能にするためである。
【0003】
経済的、環境的な理由のため、生産における一般的な傾向として、より軽量な部品及び構造体へと向かっている。すべての種類の車が問題になっている現在、環境問題は特に重要である。更なる軽量化は、燃料消費の更なる低減となり、低公害化となる。より軽量な構造体の達成のため、材料強度を向上させ、かつ/又は安全マージンの低下が受け入れられる必要がある。高強度材料は、変形、溶着、機械加工などのような材料取扱に関する更なる高い需要を引き起こす。これらの要素すべのため、品質管理が大幅に増加する。従来の亀裂検出に比較すると、近年ますます頻繁に考慮されているものとして、残留応力の評価が新たな特性としてあげられる。残留応力は、部品又は構造体に負荷応力が加わっている場合、それらの耐久性を直線的に増加又は減少する。
【0004】
最も一般的な応力測定方法は、測定される原子間の距離である格子面間(d)におけるX線回折に基づいたものである。圧縮圧力は格子距離を減少し、それに対応して引張応力は増加する。通常の測定位置の表面に比較して、特定の格子面は多方向に測定される。サンプル表面に加わる応力のため、格子距離は傾斜角の関数として変化する。異なる傾斜角において格子面の測定を可能にするため、通常の測定表面に比較して、入射及び回折ビームの角度は、既知量で変化させなければならない。研究用の回折装置では、サンプルを傾斜させることでこれを行っている。移動式の回折装置では、X線チューブ及び検出器からなる測定ヘッドを備えたゴニオメータが傾斜される。位置敏感型検出器の場合、検出器はX線チューブと共に固定され、単一チャンネル検出器システムの場合では、X線チューブに比較して、検出器は可動である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
X線回折による残留応力測定において最も重要な2つの要素は、測定位置と検出器間の距離が一定に保たれていること、及びすべての傾斜角の位置において、入射ビームが正確に測定位置に当たっていることである。従来、一般的には、測定ヘッド下に設置されたクレードル(円弧)により、これが行われていた。この技術は、例えば米国特許第5,125,016号において説明されている。この種の設計は、多くの不利な点があげられる。
1)クレードル(円弧)の構造が複雑となり、
2)測定距離が固定され、
3)測定ヘッド下に設置されたクレードル(円弧)はサンプル上で不安定になることがあり、
4)測定ヘッドがクレードルの下の場合、円弧の大きさが大きくて嵩張るようになるので移動式に向かない。
【0006】
米国特許第6,064,717号により、X線チューブ及び検出器が2つの異なる回転するロボットアームに取り付けられた測定装置が知られている。この複雑な回転アームの構造は、複数の枢着部において避け難い緩みのため、X線回折測定装置に必要な十分な正確さで組み立てるのが非常に難しい。これらの問題を許容範囲内に最小化できたとしても、コストが非常に高くなってしまうだろう。この解決策(発明)は、ポータブル(移動式向き)でない。
【0007】
米国仮出願第2004/0165697号及び米国仮出願第2004/0184580号には、機械的なクレードルが回転動作に用いられる解決策(発明)が示されているが、いくつかの基本的な調整は、リニアモーターにより行われる。この解決策(発明)にも、他の機械的なクレードルと同様の不利な点が当てはまる。特に、米国仮出願第2004/0184580号では、測定位置は傾動装置の回転軸上でなければならず、これは、異なる測定物に関する装置の調整を制限する。
【課題を解決するための手段】
【0008】
本発明は、測定中において、実際の測定ヘッドの回転動作が合わさった2つの線形動作により、測定ヘッドの動作を行うことに基づいている。
【0009】
本発明の好適な一実施形態では、傾動装置の回転軸が測定中に移動可能であり、測定位置と一致しない。
【0010】
本発明の好適な一実施形態では、線形動作とは、基本的に水平移動と垂直移動である。
さらに具体的には、本発明は、請求項1の特徴部分に記載されたことにより特徴づけられる。
【0011】
本発明に係る方法は、請求項11の特徴の要部に記載されたことにより特徴づけられる。
【0012】
この新しい発明の最も重要な3つの利点は、
1)測定ヘッド下の検出器以外、クレードル(円弧)又はその他の構造体がなく、
2)測定距離は、ソフトウェアにより自由に選択可能であり、
3)ほとんどの部品が購入できるくらいに簡易な設計のため、複雑、不正確、さらにコスト高な米国特許第6,064,717号の構造を避けることができる。
【発明を実施するための最良の形態】
【0013】
以下において、添付の図に従い、本発明の実施例に基づいて、本発明を説明する。
【0014】
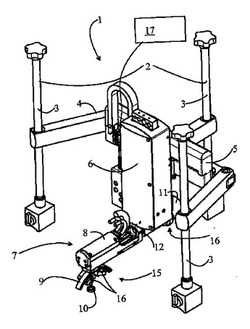
図1を参照すると、応力測定を行うゴニオメータ1は、三脚を形成する3つの可調節支持体3からなるフレーム4を備える。さらに、測定ヘッド下にある測定位置において、所望の距離で測定を行うために、この装置(ゴニオメータ1)は、第1の線形移動装置5、第2の線形移動装置6、及び傾動装置16によりフレーム4に移動可能に設置された測定ヘッド7を備える。測定中において、移動装置5、6、及び16により作られる測定ヘッド7の円弧形移動のため、傾動装置16の回転軸12は、クレードルによる解決策のように測定位置と一致しない。測定ヘッド7の円弧形移動に関して、この装置は移動装置5、6、及び16により円弧形移動を作り出す制御手段を有する。
【0015】
従って、中心のないゴニオメータには4つの主要な部品があり、そのうちの2つは、垂直移動及び水平移動の線形移動に関する装置である。3つ目は、垂直移動装置6の下端に設けられた測定ヘッド7である。測定ヘッド7は、その長手方向軸(縦軸)である角度可変軸12の周りに傾動装置16により傾斜できる。測定ヘッド7は、検出器円弧9(検出器用円弧状ガイド9)に設けられた検出器18と同様にX線チューブ筺体8も備える。特に、測定ヘッド7の傾斜角は、0.01度より正確な精度が必要とされる。回転軸12の一端に設けられた角度センサ11により、その角度が測定される。
【0016】
図2を参照すると、測定ヘッド7の内部は、検出器円弧9(検出器用円弧状ガイド9)、コリメータ10、及び検出器18がコリメータ装置15を形成する。
【0017】
測定ヘッド7が予め決められた測定位置周りの円形路を正確に沿うことで、本発明は機能する。傾動装置16と共に、線形の垂直移動装置6及び水平移動装置5とにより、この円形路が作られる。コリメータ10を経て測定位置に向けられるX線ビームは、上下又は水平方向に動いたとき、もしくは傾斜したときでさえ、常に正しい測定位置に正確に当たる。さらに、測定ヘッド7の正確な傾斜に加えて、測定位置と検出器との間の距離は、0.05mmより正確な精度で測定されなければならない。測定ヘッド7が常に円形路を移動しているため、3つのモーターすべてによる動作は、同期していなければならない。内部の制御装置(図示されていない)、又は各移動装置5、6、及び16のモーターを制御する適切な制御プログラムを備えた通常の卓上コンピュータなどの外部の制御装置17のどちらか一方により、同期と制御が実行される。もちろん、内部及び外部の制御装置を組み合わせて、制御の目的に供するものであってもよい。
【0018】
本発明の核心部分は、線形移動装置5及び6の長さの範囲において、ソフトウェアによりゴニオメータの半径が自由に変更可能である点である。
【0019】
本発明に係る中心のないゴニオメータは、好適な一実施形態において、レーザーポインタ、距離計測用のばね負荷コリメータ10、及びオプションのレーザー距離測定システムも備えてもよい。実施上、ばね負荷コリメータは、今のところは、測定ヘッドを下げることにより、コリメータが測定位置に触れ、その接触が記録され、それに応じた測定位置とその接触との間の距離が、例えば、位置センサ又は制御データにより判定される、単に測定位置までの距離測定に用いられている。各測定の初めに距離測定を行うことが利点となっている。距離測定システムは、測定ヘッド7と関係する測定位置の場所を探すために用いられる。レーザービームは、コリメータ10を経て鏡により導かれる。ゴニオメータは、標準的なシャッター構造及び安全機能も備えてもよい。
【0020】
図4及び5は、垂直及び線形移動装置の近接図を示す。
【0021】
以下に、本発明において実装するいくつかの重要な機能をあげる。
機械的機構
1)図3を参照すると、傾斜角制御は、傾動軸12に直接接続された絶対角度位置センサ11を必要とする。角度位置センサのパルス量が少なすぎるため、傾斜移動は符号器により制御される。ねじ歯車14は、できる限り少ない緩みとすべきである。
2)システムは、例えばシリアル番号などにより、自動的にX線チューブを検出できるプログラム可能な回路を備えてもよい。これにより、チューブ制御パラメータに影響する稼働時間及びチューブ型も、自動的に記録されることが可能となり、質の向上と人的ミスの低減できる。同回路は、チューブの温度制御も備えてもよい。
3)システムは、測定距離を正確に制御するためにフォトマイクロセンサ(提示されていない)も備える。この正確性は、0.01mmより精度が高くなければならない。センサは、例えば、X線チューブ筺体8の底部に位置されてもよい。
4)システムは、測定位置を指示するレーザーダイオード及び鏡を、シャッターに備えてもよい。シャッターは、X線チューブ筺体8の内部に位置する。レーザー光線は、シャッターの鏡によりコリメータ10を経て導かれる。シャッターが閉まると、レーザービームはコリメータ10から照射される。シャッターは丸型の棒に孔が設けられたものである。シャッターは、歯車モーターにより開閉される。
5)コリメータの滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、好適にはダイアモンドが塗膜される。
6)システムは、手動移動用に手動式操作装置(ジョイスティック)を備えてもよい。
制御電子回路
1)本発明に係る好適な一実施例において、ゴニオメータには、必要な補助機能すべてを有するモーター制御基板及びマイクロプロセッサ基盤の2つの電子基盤を備える。
2)モーター制御基板は、例えばモーターの種類を柔軟に変更可能となるプログラム可能なFGBA部品に基づいて組み立てられる。
3)マイクロプロセッサ基盤は、システムの位置を制御し、モーター制御基板に必要な命令を与える。イーサーネットリンクを介して、基盤は他のシステム部品17に接続されている。基盤は、検出器接続及び他の補助接続も備える。
ビーム中心位置や潜在的な機械的不正確性のような多くの調整誤差をソフトウェアの機能により修正することが、機械設計により可能となる。
ゴニオメータの機能は、図6a〜6cに関連して更に詳細に説明される。測定ヘッド7の円弧経路30は、測定中の測定ヘッド7の経路を示す。測定ヘッドは、測定中常に測定位置31に向いている。図6aは最左端における測定ヘッド7での位置、図6bは中央での位置、図6cは最右端での位置を示す。1回の測定が終了するまでに、少なくともこれら3つの位置が必要である。測定ヘッドの傾斜は傾動装置16により行われ、円弧移動は、水平移動装置5と水平移動装置6と共に行われる。
【図面の簡単な説明】
【0022】
図1は、本発明に係るゴニオメータの斜視図を示す。
【0023】
図2は、本発明に係るX線チューブの筺体の斜視図を示す。
【0024】
図3は、本発明に係る傾動装置の斜視図を示す。
【0025】
図4は、本発明に係る垂直移動装置の斜視図を示す。
【0026】
図5は、本発明に係る水平移動装置の斜視図を示す。
【0027】
図6a〜6cは、図1のゴニオメータの作動状態を示す正面図
【符号の説明】
【0028】
以下の本発明の詳細な説明において、以下の用語が使用される。
1 ゴニオメータ
2 三脚
3 可調節支持体
4 支持フレーム
5 水平移動装置
6 垂直移動装置
7 測定ヘッド
8 X線チューブ筺体
9 検出器用円弧
10 コリメータ
11 角度センサ
12 傾動軸
13 角度可変モーター
14 ねじ歯車
15 コリメータ装置
16 傾動装置
17 制御装置
18 検出器
30 測定ヘッド7の経路
31 測定位置
【図1】

【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図6c】
【技術分野】
【0001】
本発明はゴニオメータに関する。
【背景技術】
【0002】
本発明は、応力測定及び微細構造の特定用の持ち移動式ゴニオメータ、又はいわゆる回折装置と呼ばれるものである。移動式とする主な目的は、クランクシャフト、パイプライン、橋などの大きな部品又は構造体の測定を可能にするためである。
【0003】
経済的、環境的な理由のため、生産における一般的な傾向として、より軽量な部品及び構造体へと向かっている。すべての種類の車が問題になっている現在、環境問題は特に重要である。更なる軽量化は、燃料消費の更なる低減となり、低公害化となる。より軽量な構造体の達成のため、材料強度を向上させ、かつ/又は安全マージンの低下が受け入れられる必要がある。高強度材料は、変形、溶着、機械加工などのような材料取扱に関する更なる高い需要を引き起こす。これらの要素すべのため、品質管理が大幅に増加する。従来の亀裂検出に比較すると、近年ますます頻繁に考慮されているものとして、残留応力の評価が新たな特性としてあげられる。残留応力は、部品又は構造体に負荷応力が加わっている場合、それらの耐久性を直線的に増加又は減少する。
【0004】
最も一般的な応力測定方法は、測定される原子間の距離である格子面間(d)におけるX線回折に基づいたものである。圧縮圧力は格子距離を減少し、それに対応して引張応力は増加する。通常の測定位置の表面に比較して、特定の格子面は多方向に測定される。サンプル表面に加わる応力のため、格子距離は傾斜角の関数として変化する。異なる傾斜角において格子面の測定を可能にするため、通常の測定表面に比較して、入射及び回折ビームの角度は、既知量で変化させなければならない。研究用の回折装置では、サンプルを傾斜させることでこれを行っている。移動式の回折装置では、X線チューブ及び検出器からなる測定ヘッドを備えたゴニオメータが傾斜される。位置敏感型検出器の場合、検出器はX線チューブと共に固定され、単一チャンネル検出器システムの場合では、X線チューブに比較して、検出器は可動である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
X線回折による残留応力測定において最も重要な2つの要素は、測定位置と検出器間の距離が一定に保たれていること、及びすべての傾斜角の位置において、入射ビームが正確に測定位置に当たっていることである。従来、一般的には、測定ヘッド下に設置されたクレードル(円弧)により、これが行われていた。この技術は、例えば米国特許第5,125,016号において説明されている。この種の設計は、多くの不利な点があげられる。
1)クレードル(円弧)の構造が複雑となり、
2)測定距離が固定され、
3)測定ヘッド下に設置されたクレードル(円弧)はサンプル上で不安定になることがあり、
4)測定ヘッドがクレードルの下の場合、円弧の大きさが大きくて嵩張るようになるので移動式に向かない。
【0006】
米国特許第6,064,717号により、X線チューブ及び検出器が2つの異なる回転するロボットアームに取り付けられた測定装置が知られている。この複雑な回転アームの構造は、複数の枢着部において避け難い緩みのため、X線回折測定装置に必要な十分な正確さで組み立てるのが非常に難しい。これらの問題を許容範囲内に最小化できたとしても、コストが非常に高くなってしまうだろう。この解決策(発明)は、ポータブル(移動式向き)でない。
【0007】
米国仮出願第2004/0165697号及び米国仮出願第2004/0184580号には、機械的なクレードルが回転動作に用いられる解決策(発明)が示されているが、いくつかの基本的な調整は、リニアモーターにより行われる。この解決策(発明)にも、他の機械的なクレードルと同様の不利な点が当てはまる。特に、米国仮出願第2004/0184580号では、測定位置は傾動装置の回転軸上でなければならず、これは、異なる測定物に関する装置の調整を制限する。
【課題を解決するための手段】
【0008】
本発明は、測定中において、実際の測定ヘッドの回転動作が合わさった2つの線形動作により、測定ヘッドの動作を行うことに基づいている。
【0009】
本発明の好適な一実施形態では、傾動装置の回転軸が測定中に移動可能であり、測定位置と一致しない。
【0010】
本発明の好適な一実施形態では、線形動作とは、基本的に水平移動と垂直移動である。
さらに具体的には、本発明は、請求項1の特徴部分に記載されたことにより特徴づけられる。
【0011】
本発明に係る方法は、請求項11の特徴の要部に記載されたことにより特徴づけられる。
【0012】
この新しい発明の最も重要な3つの利点は、
1)測定ヘッド下の検出器以外、クレードル(円弧)又はその他の構造体がなく、
2)測定距離は、ソフトウェアにより自由に選択可能であり、
3)ほとんどの部品が購入できるくらいに簡易な設計のため、複雑、不正確、さらにコスト高な米国特許第6,064,717号の構造を避けることができる。
【発明を実施するための最良の形態】
【0013】
以下において、添付の図に従い、本発明の実施例に基づいて、本発明を説明する。
【0014】
図1を参照すると、応力測定を行うゴニオメータ1は、三脚を形成する3つの可調節支持体3からなるフレーム4を備える。さらに、測定ヘッド下にある測定位置において、所望の距離で測定を行うために、この装置(ゴニオメータ1)は、第1の線形移動装置5、第2の線形移動装置6、及び傾動装置16によりフレーム4に移動可能に設置された測定ヘッド7を備える。測定中において、移動装置5、6、及び16により作られる測定ヘッド7の円弧形移動のため、傾動装置16の回転軸12は、クレードルによる解決策のように測定位置と一致しない。測定ヘッド7の円弧形移動に関して、この装置は移動装置5、6、及び16により円弧形移動を作り出す制御手段を有する。
【0015】
従って、中心のないゴニオメータには4つの主要な部品があり、そのうちの2つは、垂直移動及び水平移動の線形移動に関する装置である。3つ目は、垂直移動装置6の下端に設けられた測定ヘッド7である。測定ヘッド7は、その長手方向軸(縦軸)である角度可変軸12の周りに傾動装置16により傾斜できる。測定ヘッド7は、検出器円弧9(検出器用円弧状ガイド9)に設けられた検出器18と同様にX線チューブ筺体8も備える。特に、測定ヘッド7の傾斜角は、0.01度より正確な精度が必要とされる。回転軸12の一端に設けられた角度センサ11により、その角度が測定される。
【0016】
図2を参照すると、測定ヘッド7の内部は、検出器円弧9(検出器用円弧状ガイド9)、コリメータ10、及び検出器18がコリメータ装置15を形成する。
【0017】
測定ヘッド7が予め決められた測定位置周りの円形路を正確に沿うことで、本発明は機能する。傾動装置16と共に、線形の垂直移動装置6及び水平移動装置5とにより、この円形路が作られる。コリメータ10を経て測定位置に向けられるX線ビームは、上下又は水平方向に動いたとき、もしくは傾斜したときでさえ、常に正しい測定位置に正確に当たる。さらに、測定ヘッド7の正確な傾斜に加えて、測定位置と検出器との間の距離は、0.05mmより正確な精度で測定されなければならない。測定ヘッド7が常に円形路を移動しているため、3つのモーターすべてによる動作は、同期していなければならない。内部の制御装置(図示されていない)、又は各移動装置5、6、及び16のモーターを制御する適切な制御プログラムを備えた通常の卓上コンピュータなどの外部の制御装置17のどちらか一方により、同期と制御が実行される。もちろん、内部及び外部の制御装置を組み合わせて、制御の目的に供するものであってもよい。
【0018】
本発明の核心部分は、線形移動装置5及び6の長さの範囲において、ソフトウェアによりゴニオメータの半径が自由に変更可能である点である。
【0019】
本発明に係る中心のないゴニオメータは、好適な一実施形態において、レーザーポインタ、距離計測用のばね負荷コリメータ10、及びオプションのレーザー距離測定システムも備えてもよい。実施上、ばね負荷コリメータは、今のところは、測定ヘッドを下げることにより、コリメータが測定位置に触れ、その接触が記録され、それに応じた測定位置とその接触との間の距離が、例えば、位置センサ又は制御データにより判定される、単に測定位置までの距離測定に用いられている。各測定の初めに距離測定を行うことが利点となっている。距離測定システムは、測定ヘッド7と関係する測定位置の場所を探すために用いられる。レーザービームは、コリメータ10を経て鏡により導かれる。ゴニオメータは、標準的なシャッター構造及び安全機能も備えてもよい。
【0020】
図4及び5は、垂直及び線形移動装置の近接図を示す。
【0021】
以下に、本発明において実装するいくつかの重要な機能をあげる。
機械的機構
1)図3を参照すると、傾斜角制御は、傾動軸12に直接接続された絶対角度位置センサ11を必要とする。角度位置センサのパルス量が少なすぎるため、傾斜移動は符号器により制御される。ねじ歯車14は、できる限り少ない緩みとすべきである。
2)システムは、例えばシリアル番号などにより、自動的にX線チューブを検出できるプログラム可能な回路を備えてもよい。これにより、チューブ制御パラメータに影響する稼働時間及びチューブ型も、自動的に記録されることが可能となり、質の向上と人的ミスの低減できる。同回路は、チューブの温度制御も備えてもよい。
3)システムは、測定距離を正確に制御するためにフォトマイクロセンサ(提示されていない)も備える。この正確性は、0.01mmより精度が高くなければならない。センサは、例えば、X線チューブ筺体8の底部に位置されてもよい。
4)システムは、測定位置を指示するレーザーダイオード及び鏡を、シャッターに備えてもよい。シャッターは、X線チューブ筺体8の内部に位置する。レーザー光線は、シャッターの鏡によりコリメータ10を経て導かれる。シャッターが閉まると、レーザービームはコリメータ10から照射される。シャッターは丸型の棒に孔が設けられたものである。シャッターは、歯車モーターにより開閉される。
5)コリメータの滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、好適にはダイアモンドが塗膜される。
6)システムは、手動移動用に手動式操作装置(ジョイスティック)を備えてもよい。
制御電子回路
1)本発明に係る好適な一実施例において、ゴニオメータには、必要な補助機能すべてを有するモーター制御基板及びマイクロプロセッサ基盤の2つの電子基盤を備える。
2)モーター制御基板は、例えばモーターの種類を柔軟に変更可能となるプログラム可能なFGBA部品に基づいて組み立てられる。
3)マイクロプロセッサ基盤は、システムの位置を制御し、モーター制御基板に必要な命令を与える。イーサーネットリンクを介して、基盤は他のシステム部品17に接続されている。基盤は、検出器接続及び他の補助接続も備える。
ビーム中心位置や潜在的な機械的不正確性のような多くの調整誤差をソフトウェアの機能により修正することが、機械設計により可能となる。
ゴニオメータの機能は、図6a〜6cに関連して更に詳細に説明される。測定ヘッド7の円弧経路30は、測定中の測定ヘッド7の経路を示す。測定ヘッドは、測定中常に測定位置31に向いている。図6aは最左端における測定ヘッド7での位置、図6bは中央での位置、図6cは最右端での位置を示す。1回の測定が終了するまでに、少なくともこれら3つの位置が必要である。測定ヘッドの傾斜は傾動装置16により行われ、円弧移動は、水平移動装置5と水平移動装置6と共に行われる。
【図面の簡単な説明】
【0022】
図1は、本発明に係るゴニオメータの斜視図を示す。
【0023】
図2は、本発明に係るX線チューブの筺体の斜視図を示す。
【0024】
図3は、本発明に係る傾動装置の斜視図を示す。
【0025】
図4は、本発明に係る垂直移動装置の斜視図を示す。
【0026】
図5は、本発明に係る水平移動装置の斜視図を示す。
【0027】
図6a〜6cは、図1のゴニオメータの作動状態を示す正面図
【符号の説明】
【0028】
以下の本発明の詳細な説明において、以下の用語が使用される。
1 ゴニオメータ
2 三脚
3 可調節支持体
4 支持フレーム
5 水平移動装置
6 垂直移動装置
7 測定ヘッド
8 X線チューブ筺体
9 検出器用円弧
10 コリメータ
11 角度センサ
12 傾動軸
13 角度可変モーター
14 ねじ歯車
15 コリメータ装置
16 傾動装置
17 制御装置
18 検出器
30 測定ヘッド7の経路
31 測定位置
【図1】
【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図6c】
【特許請求の範囲】
【請求項1】
応力測定及び粒子の微細構造の特定を行い、
フレーム(4)と、
測定位置(31)において測定を実行するため、第1の線形移動装置(5)、第2の線形移動装置(6)及び傾動装置(16)により移動可能にフレーム(4)に設けられた測定ヘッド(7,8,9,10)とから成り、
前記傾動装置(16)の回転軸(12)が前記測定位置(31)に一致せず、
測定中に、前記移動装置(5,6,16)により、測定ヘッド(7,8,9,10)の円弧形(30)の移動を作り出す手段を備えることを特徴とするゴニオメータ(1)。
【請求項2】
請求項1に記載の装置は、傾斜角測定用の符号器を備えることを特徴とするゴニオメータ。
【請求項3】
請求項1又は2に記載の装置は、傾動装置(16)の歯車(14)が最小の緩みを有していることを特徴とするゴニオメータ。
【請求項4】
請求項1〜3のいずれかに記載の装置は、連続番号などによりX線チューブを自動的に認識する手段を備えることを特徴とするゴニオメータ。
【請求項5】
請求項1〜4のいずれかに記載の装置は、X線チューブ用の温度制御手段を備えることを特徴とするゴニオメータ。
【請求項6】
請求項1〜5のいずれかに記載の装置は、0.01mmより確かな精度で測定距離を正確に制御するフォトマイクロセンサを備えることを特徴とするゴニオメータ。
【請求項7】
請求項1〜6のいずれかに記載の装置は、測定位置を示すレーザーダイオード及び鏡をシャッターに備えることを特徴とするゴニオメータ。
【請求項8】
請求項1〜7のいずれかに記載の装置は、コリメータ滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、ダイアモンドが塗膜形成されることを特徴とするゴニオメータ。
【請求項9】
請求項1〜8のいずれかに記載の装置は、手動移動用に手動式操作装置を備えることを特徴とするゴニオメータ。
【請求項10】
請求項1〜9のいずれかに記載の装置は、実際の装置内に制御電子回路を備えることを特徴とするゴニオメータ。
【請求項11】
応力測定及び粒子の微細構造の特定を行うゴニオメータ(1)において、
測定ヘッド(7,8,9,10)が、測定位置(31)の周りを円弧軌道(30)に沿って動かされ、
1つの傾動装置(16)と共に2つの第1線形移動装置(5,6)の組み合わせにより、移動(30)が行われることを特徴とするゴニオメータ制御方法。
【請求項12】
請求項11に記載された装置は、傾動装置(16)の回転軸(12)が測定位置(31)と一致しないように、傾斜移動が行われることを特徴とするゴニオメータ制御方法。
【請求項13】
請求項11又は12に記載された方法は、符号器が傾斜角測定に用いられることを特徴とするゴニオメータ制御方法。
【請求項14】
請求項11〜13のいずれかに記載された方法は、連続番号などによりX線チューブが自動的に検出されることを特徴とするゴニオメータ制御方法。
【請求項15】
請求項11〜14のいずれかに記載された方法は、X線チューブの温度制御を行うことを特徴とするゴニオメータ制御方法。
【請求項16】
請求項11〜15のいずれかに記載された方法は、0.01mmより確かな精度で測定距離を正確に制御するために、フォトマイクロセンサを用いることを特徴とするゴニオメータ制御方法。
【請求項17】
請求項11〜16のいずれかに記載された方法は、測定位置を指示するために、レーザーダイオード及び鏡をシャッターに用いることを特徴とするゴニオメータ制御方法。
【請求項18】
請求項11〜17のいずれかに記載された方法は、コリメータ滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、ダイアモンドが塗膜形成されることを特徴とするゴニオメータ制御方法。
【請求項19】
請求項11〜18のいずれかに記載された方法は、手動移動に手動式操作装置(ジョイスティック)を用いることを特徴とするゴニオメータ制御方法。
【請求項20】
請求項11〜19のいずれかに記載された方法は、制御電子回路は、実際の装置内に位置することを特徴とするゴニオメータ制御方法。
【請求項1】
応力測定及び粒子の微細構造の特定を行い、
フレーム(4)と、
測定位置(31)において測定を実行するため、第1の線形移動装置(5)、第2の線形移動装置(6)及び傾動装置(16)により移動可能にフレーム(4)に設けられた測定ヘッド(7,8,9,10)とから成り、
前記傾動装置(16)の回転軸(12)が前記測定位置(31)に一致せず、
測定中に、前記移動装置(5,6,16)により、測定ヘッド(7,8,9,10)の円弧形(30)の移動を作り出す手段を備えることを特徴とするゴニオメータ(1)。
【請求項2】
請求項1に記載の装置は、傾斜角測定用の符号器を備えることを特徴とするゴニオメータ。
【請求項3】
請求項1又は2に記載の装置は、傾動装置(16)の歯車(14)が最小の緩みを有していることを特徴とするゴニオメータ。
【請求項4】
請求項1〜3のいずれかに記載の装置は、連続番号などによりX線チューブを自動的に認識する手段を備えることを特徴とするゴニオメータ。
【請求項5】
請求項1〜4のいずれかに記載の装置は、X線チューブ用の温度制御手段を備えることを特徴とするゴニオメータ。
【請求項6】
請求項1〜5のいずれかに記載の装置は、0.01mmより確かな精度で測定距離を正確に制御するフォトマイクロセンサを備えることを特徴とするゴニオメータ。
【請求項7】
請求項1〜6のいずれかに記載の装置は、測定位置を示すレーザーダイオード及び鏡をシャッターに備えることを特徴とするゴニオメータ。
【請求項8】
請求項1〜7のいずれかに記載の装置は、コリメータ滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、ダイアモンドが塗膜形成されることを特徴とするゴニオメータ。
【請求項9】
請求項1〜8のいずれかに記載の装置は、手動移動用に手動式操作装置を備えることを特徴とするゴニオメータ。
【請求項10】
請求項1〜9のいずれかに記載の装置は、実際の装置内に制御電子回路を備えることを特徴とするゴニオメータ。
【請求項11】
応力測定及び粒子の微細構造の特定を行うゴニオメータ(1)において、
測定ヘッド(7,8,9,10)が、測定位置(31)の周りを円弧軌道(30)に沿って動かされ、
1つの傾動装置(16)と共に2つの第1線形移動装置(5,6)の組み合わせにより、移動(30)が行われることを特徴とするゴニオメータ制御方法。
【請求項12】
請求項11に記載された装置は、傾動装置(16)の回転軸(12)が測定位置(31)と一致しないように、傾斜移動が行われることを特徴とするゴニオメータ制御方法。
【請求項13】
請求項11又は12に記載された方法は、符号器が傾斜角測定に用いられることを特徴とするゴニオメータ制御方法。
【請求項14】
請求項11〜13のいずれかに記載された方法は、連続番号などによりX線チューブが自動的に検出されることを特徴とするゴニオメータ制御方法。
【請求項15】
請求項11〜14のいずれかに記載された方法は、X線チューブの温度制御を行うことを特徴とするゴニオメータ制御方法。
【請求項16】
請求項11〜15のいずれかに記載された方法は、0.01mmより確かな精度で測定距離を正確に制御するために、フォトマイクロセンサを用いることを特徴とするゴニオメータ制御方法。
【請求項17】
請求項11〜16のいずれかに記載された方法は、測定位置を指示するために、レーザーダイオード及び鏡をシャッターに用いることを特徴とするゴニオメータ制御方法。
【請求項18】
請求項11〜17のいずれかに記載された方法は、コリメータ滑りチューブは、摩擦が低減し、それにより測定距離の精度が向上するように、ダイアモンドが塗膜形成されることを特徴とするゴニオメータ制御方法。
【請求項19】
請求項11〜18のいずれかに記載された方法は、手動移動に手動式操作装置(ジョイスティック)を用いることを特徴とするゴニオメータ制御方法。
【請求項20】
請求項11〜19のいずれかに記載された方法は、制御電子回路は、実際の装置内に位置することを特徴とするゴニオメータ制御方法。
【公表番号】特表2008−522142(P2008−522142A)
【公表日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2007−542019(P2007−542019)
【出願日】平成17年11月24日(2005.11.24)
【国際出願番号】PCT/FI2005/000505
【国際公開番号】WO2006/056647
【国際公開日】平成18年6月1日(2006.6.1)
【出願人】(507169462)
【Fターム(参考)】
【公表日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成17年11月24日(2005.11.24)
【国際出願番号】PCT/FI2005/000505
【国際公開番号】WO2006/056647
【国際公開日】平成18年6月1日(2006.6.1)
【出願人】(507169462)
【Fターム(参考)】
[ Back to top ]