
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、サスペンションアッセンブリ取り付け方法に関する。詳しくは、サスペンションアッセンブリを車両に取り付けるため車両ボディに接近させていく過程で、起こり得るダンパと車両ボディ側との干渉を回避するサスペンションアッセンブリ取り付け方法に関する。
【背景技術】
【0002】
従来から、車両の製造ラインでは、サスペンションアッセンブリをボディに取り付けることが行われている。サスペンションアッセンブリは、フロント側あるいはリア側の左右一対のダンパの下端側をサブフレームで連結してアッセンブリ化したものである。この一対のダンパの上端側を、車両ボディに形成された左右一対のダンパ取付孔に取り付けることで、サスペンションアッセンブリが車両ボディに取り付けられる。
【0003】
サスペンションアッセンブリを車両ボディに取り付けるときには、サスペンションアッセンブリを車両ボディに接近させていく。この接近工程中、左右一対のダンパの姿勢を支持しながら、ダンパの上端側を車両ボディの左右一対のダンパ取付孔にそれぞれ位置合わせする装置が必要であり、従来からさまざまな方法が提案されている。
【0004】
例えば、引用文献1には、サスペンションアッセンブリを載置するパレット上に把持具を設置し、この把持具によりダンパをパレットに対して固定した位置に把持した状態で、ダンパ取付孔に取り付ける方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3904713号公報
【0006】
【特許文献2】特開2007−69826号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、引用文献1に記載の方法では、ダンパの位置はパレットに対して固定した状態に保たれるため、例えば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合は、この方法を採用することができないという課題がある。
【0008】
本発明は、上述の課題に鑑みてなされたものであり、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のサスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ(例えば、後述のサスペンションアッセンブリ20)を車両のボディ(例えば、後述のボディ10)に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット(例えば、後述のパレット3)の上昇と同期させて、ダンパ(例えば、後述のダンパ25L,25R)を支持する支持装置(例えば、後述のダンパ支持ロボット5L,5R)により当該ダンパの位置を必要に応じて変更することで、前記ボディに対する前記ダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、前記支持装置により前記ダンパを前記ボディの所定のダンパ取付孔(例えば、後述のダンパ取付孔13L,13R)に位置合わせする位置合わせ工程と、を含むことを特徴とする。
【0010】
この発明によれば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避することができ、サスペンションアッセンブリを車両に取り付けることができる。
【0011】
この場合、前記パレットは、前記ボディの所定位置にある位置決め孔(例えば、後述の位置決め孔15L,15R)と嵌合することにより位置決め可能な位置決めピン(例えば、後述の位置決めピン31L,31R)を有しており、前記位置合わせ工程は、前記位置決めピンが前記位置決め孔と嵌合したときの前記パレットの位置を測定し、測定した前記パレットの位置を前記支持装置に伝送し、伝送された前記パレットの位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることが好ましい。
【0012】
この発明によれば、上述の効果と同様の効果がある。また、位置決めピンが位置決め孔と嵌合したとき測定したパレットの位置に応じて、ダンパをダンパ取付孔に位置合わせすることができる。
【0013】
この場合、前記位置合わせ工程は、前記ダンパ取付孔の位置を測定し、測定した前記ダンパ取付孔の位置を前記支持装置に伝送し、伝送された前記ダンパ取付孔の位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることが好ましい。
【0014】
この発明によれば、上述の効果と同様の効果がある。また、測定したダンパ取付孔の位置に応じて、ダンパをダンパ取付孔に位置合わせすることができる。
【発明の効果】
【0015】
本発明によれば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避することができ、サスペンションアッセンブリを車両に取り付けることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図2】前記実施形態に係るボディおよびサスペンションアッセンブリの構成を示す正面から見た模式図である。
【図3】前記実施形態に係るアッセンブリ支持装置の構成を示す側面から見た模式図である。
【図4】前記実施形態に係る上昇工程を示す模式図である。
【図5】前記実施形態に係る干渉回避工程を示す模式図である。
【図6】前記実施形態に係る位置合わせ工程を示す模式図である。
【図7】前記実施形態に係る位置合わせ工程を示す拡大図である。
【図8】前記実施形態に係る取り付け工程を示す模式図である。
【図9】本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図10】前記実施形態に係る上昇工程を示す模式図である。
【図11】前記実施形態に係る干渉回避工程を示す模式図である。
【図12】前記実施形態に係る位置合わせ工程および取り付け工程を示す模式図である。
【図13】本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図14】前記実施形態に係る上昇工程を示す模式図である。
【図15】前記実施形態に係る干渉回避工程を示す模式図である。
【図16】前記実施形態に係る位置合わせ工程および取り付け工程を示す模式図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について、図面を参照しながら説明する。
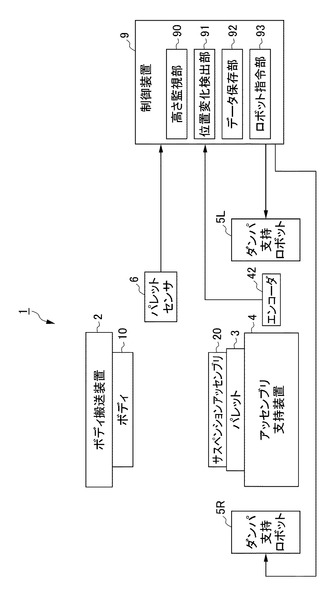
図1は、本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム1を示すブロック図である。本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム1を用いて実施される。
【0018】
マウントシステム1は、車両のボディ10の所定の位置に、サスペンションアッセンブリ20を取り付けるものであり、車両の製造ラインの一部に設けられる。マウントシステム1は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、支持装置としてのダンパ支持ロボット5、パレットセンサ6、および制御装置9で構成される。
【0019】
ボディ搬送装置2は、ボディ10を懸架して搬送する。パレット3は、サスペンションアッセンブリ20を搭載する。アッセンブリ支持装置4は、パレット3を載置してサスペンションアッセンブリ20を支持する。ダンパ支持ロボット5は、パレット3およびアッセンブリ支持装置4の外方に設置されてダンパを支持する。パレットセンサ6は、パレット3の位置(位置変化)を測定する。制御装置9は、これらを制御する。
なお、符号に付けるL,R,FR,RRの文字はそれぞれ、車両から見て左、右、前、後を表す。
【0020】
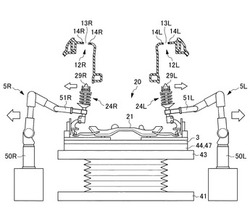
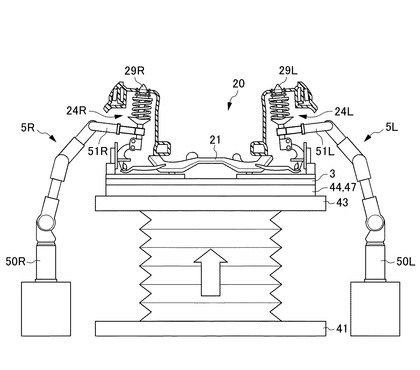
図2は、ボディ10およびサスペンションアッセンブリ20の構成を示す正面から見た模式図である。サスペンションアッセンブリ20は、車両の下回りを構成するものである。サスペンションアッセンブリ20は、左右の前輪が取り付けられるフロント側のサスペンションアッセンブリと、左右の後輪が取り付けられるリア側のサスペンションアッセンブリとで構成される。図2では、フロント側のサスペンションアッセンブリ20の構成のみを示す。
【0021】
サスペンションアッセンブリ20は、サブフレーム21をベースとして、複数の部品を概ね左右対称に組み合わせて構成される。サブフレーム21の左右両側には、左右一対のロアアーム22L,22R、ハブ23L,23R、およびダンパアッセンブリ24L,24Rが組み付けられる。サブフレーム21のほぼ中央には、図示しないエンジンが組み付けられる。ハブ23L,23Rには、後工程において図示しない一対の前輪が取り付けられる。
【0022】
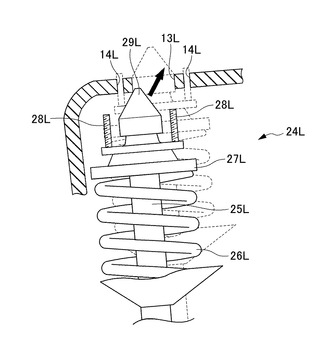
ダンパアッセンブリ24Lは、ほぼ棒状のダンパ25Lと、ダンパ25Lにほぼ同心状に設けられたスプリング26Lと、ダンパアッセンブリ24Lの上端側を構成するダンパマウント27Lとを備える。同様に、ダンパアッセンブリ24Rは、ほぼ棒状のダンパ25Rと、ダンパ25Rにほぼ同心状に設けられたスプリング26Rと、ダンパアッセンブリ24Rの上端側を構成するダンパマウント27Rとを備える。ダンパアッセンブリ24L,24Rの下端側は、ロアアーム22L,22Rをそれぞれ介してサブフレーム21の両端側に連結されている。
【0023】
ダンパマウント27Lには、ダンパ25Lとほぼ平行に延びる複数のボルト部28L,28Lが立設されている。同様に、ダンパマウント27Rには、ダンパ25Rとほぼ平行に延びる複数のボルト部28R,28Rが立設されている。
【0024】
ダンパマウント27L,27Rの中央には、ダンパキャップ29L,29Rがそれぞれ着脱自在に取り付けられている。ダンパキャップ29L,29Rは、いずれも円錐状に形成されており、後述するダンパ取付孔13L,13Rに挿入する際のガイド部材となっている。
【0025】
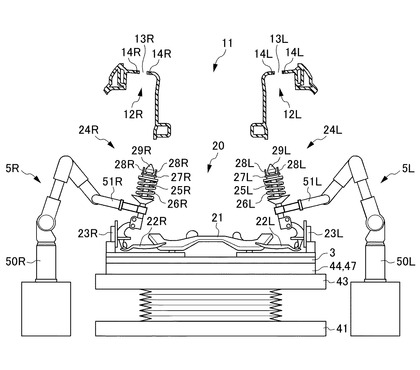
ボディ10は、車両を構成する基礎フレームであり、エンジンが収容されるエンジンルーム11を備えている。エンジンルーム11の左右両側には、左右一対のダンパハウジング12L,12Rが形成されている。ダンパハウジング12L,12Rには、ダンパアッセンブリ24L,24Rがそれぞれ収納される。
【0026】
ダンパハウジング12Lには、ダンパアッセンブリ24Lのダンパキャップ29Lが挿入されるダンパ取付孔13L、および、ボルト部28L,28Lがそれぞれ挿入されるボルト挿入孔14L,14Lが形成されている。同様に、ダンパハウジング12Rには、ダンパアッセンブリ24Rのダンパキャップ29Rが挿入されるダンパ取付孔13R、および、ボルト部28R,28Rがそれぞれ挿入されるボルト挿入孔14R,14Rが形成されている。ダンパ取付孔13L,13R、およびボルト挿入孔14L,14Rは、ボディ10の中心に対して左右対称に形成されている。特に、ダンパ取付孔13L,13Rは、ボディ10の姿勢の基準となる。
【0027】
ボディ10の所定位置には、後述する左右一対の位置決め孔15L,15R(図6参照)が形成されている。ボディ10は、ボディ搬送装置2の図示しないハンガーに懸架された状態で、サスペンションアッセンブリ20の上方に搬送される。
【0028】
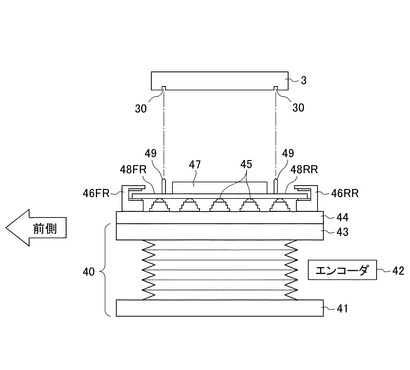
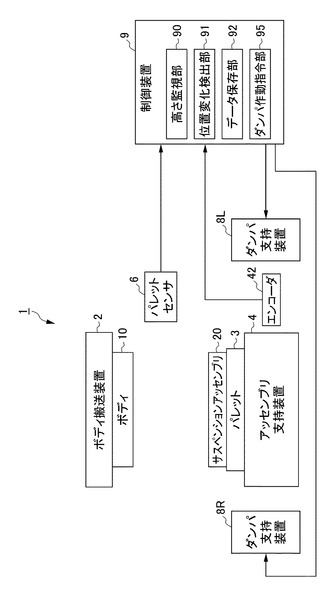
図3は、アッセンブリ支持装置4の構成を示す側面から見た模式図である。アッセンブリ支持装置4は、サスペンションアッセンブリ20を搭載するパレット3を載置して支持するものである。アッセンブリ支持装置4は、リフタ40と、パレット3を所定位置に載置して支持するスライドテーブル47とを備える。
【0029】
リフタ40は、床面に設置されるベース41に対して昇降可能な昇降台43を備え、図示しない駆動装置の作動により昇降台43を昇降させる。昇降台43の高さは、駆動装置と連動するエンコーダ42が測定する。昇降台43の高さデータを表すエンコーダ42の出力信号は、制御装置9の高さ監視部90に常時伝送される。
【0030】
昇降台43の上面には、フリーベア44が設置されている。フリーベア44は、同一平面上にある多数のボール45が支持体により回転自在に支持されたものである。フリーベア44は、前方側および後方側にエア駆動式のブレーキ46FR,46RRをそれぞれ備えている。ブレーキ46FR,46RRは、いずれも断面凹溝状のものであり、車幅方向に沿って互いに平行に延び、凹溝どうしを互いに対向させて配置されている。
【0031】
スライドテーブル47は、フリーベア44上に配置され、フリーベア44により下面を多数の点で支持される。スライドテーブル47は、車両の前方側および後方側にフランジ部48FR,48RRをそれぞれ備えている。フランジ部48FR,48RRは、フリーベア44のブレーキ46FR,46RRにそれぞれ対応する。
【0032】
スライドテーブル47のフランジ部48FR,48RRは、フリーベア44のブレーキ46FR,46RRの互いに対向する凹溝内に配置される。スライドテーブル47は、フリーベア44により、ブレーキ46FR,46RRと平行な車幅方向に沿って移動自在に支持される。
【0033】
スライドテーブル47の前方フランジ部48FRの前端縁から後方フランジ部48RRの後端縁までの長さは、フリーベア44の前方ブレーキ46FRの凹溝前端から後方ブレーキ46RRの凹溝後端までの長さに比べて、短く形成されている。スライドテーブル47は、フリーベア44により、この長さの差分だけ車両の前後方向に移動自在に支持される。
【0034】
ブレーキ46FR,46RRは、解放状態にあるとき、スライドテーブル47のフランジ部48FR,48RRに対して何ら作用を及ぼさない。この場合、スライドテーブル47は、フリーベア44上を車幅方向に自由に移動することができる。スライドテーブル47は、フリーベア44上を車両の前後方向にも所定の範囲で自由に移動することができる。したがって、スライドテーブル47は、フリーベア44上を所定の範囲で角度変更(回動)することもできる。
【0035】
ブレーキ46FR,46RRは、作動状態にあるとき、エア圧により、スライドテーブル47のフランジ部48FR,48RRに対して移動を阻止するブレーキ作用を及ぼす。この場合、スライドテーブル47は、フリーベア44上での移動がロックされ、リフタ40の昇降台43に対して固定される。
【0036】
スライドテーブル47は、パレット3の底面に形成した嵌合孔30と嵌合する固定ピン49を備えている。固定ピン49が嵌合孔30と嵌合することで、パレット3はスライドテーブル47上の所定位置に固定される。
【0037】
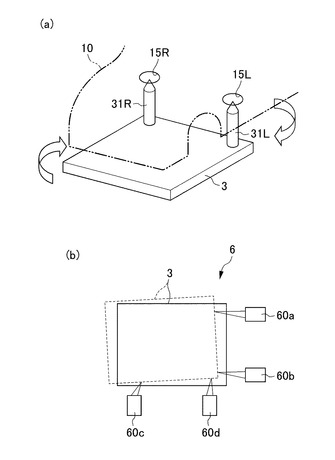
パレット3は、図6(a)に示すように、位置決めピン31L,31Rを備えている。位置決めピン31L,31Rは、ボディ10の位置決め孔15L,15Rと嵌合することにより、ボディ10に対してパレット3を位置決めする。位置決めピン31L,31Rは、サスペンションアッセンブリ20が上昇して所定の高さに到達したとき、ボディ10の位置決め孔15L,15Rと嵌合する。
【0038】
ダンパ支持ロボット5L,5Rは、いわゆる多関節ロボットであり、アッセンブリ支持装置4の左右両側において床面に設置されている。ダンパ支持ロボット5L,5Rは、ロボット本体50L,50Rから延びる多段のアームを備え、先端の腕部51L,51Rは、サスペンションアッセンブリ20に下端側が連結された左右一対のダンパアッセンブリ24L,24Rの姿勢を支える。
【0039】
パレットセンサ6は、図6に示すように、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合したときのパレット3の平面的な位置を測定する。すなわち、パレットセンサ6は、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前のパレット3の平面的な位置と、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合した後のパレット3の平面的な位置との変化を測定する。このように、パレット3の上昇にともなう平面的な位置変化を測定するパレットセンサ6は、例えば、パレット3の縦横両辺に配置した複数の測定器60a,60b,60c,60dで構成される。各測定器60は、パレット3に非接触で測定できるものであり、例えば、赤外線センサ、レーザ距離計等を用いることができる。
【0040】
パレットセンサ6が測定した、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前後のパレット3の位置変化は、位置変化データとして制御装置9の位置変化検出部91に伝送され、さらにダンパ支持ロボット5L,5Rに伝送される。ダンパ支持ロボット5L,5Rは、制御装置9から伝送されるパレット3の位置変化に応じて、ダンパアッセンブリ24L,24Rの位置を変更する。これについては後述する。
【0041】
制御装置9は、高さ監視部90と、位置変化検出部91と、データ保存部92と、ロボット指令部93とを備える。高さ監視部90は、リフタ40と連動するエンコーダ42からの出力信号により、昇降台43の高さデータを常時監視する。位置変化検出部91は、パレットセンサ6により測定される、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前後のパレット3の位置変化データを検出する。データ保存部92は、パレット3の上昇過程において、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さおよび方向、並びに、その干渉を回避するためにダンパアッセンブリ24L,24Rがとるべき姿勢について、あらかじめティーチングして取得したデータを保存する。
【0042】
ロボット指令部93は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら、データ保存部92のティーチングデータに基づいて、ダンパ支持ロボット5L,5Rに対して姿勢制御指令を出力する。また、ロボット指令部93は、位置変化検出部91が検出したパレット3の位置変化データをリアルタイムでダンパ支持ロボット5L,5Rに出力する。
【0043】
上記のようなマウントシステム1を用いて、本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0044】
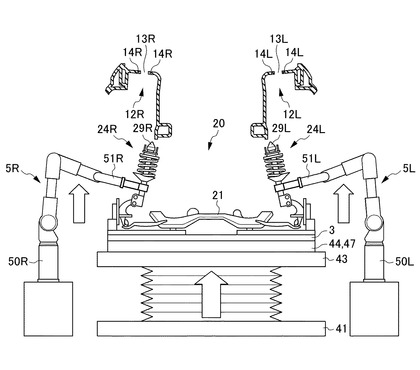
干渉回避工程は、パレット3の上昇と同期させて、ダンパ支持ロボット5L,5Rの腕部51L,51Rによりダンパアッセンブリ24L,24Rの位置(姿勢)を必要に応じて変更することで、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0045】
サスペンションアッセンブリ20はパレット3の所定位置に搭載され、パレット3はアッセンブリ支持装置4のスライドテーブル47上の所定位置に固定される。アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0046】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ロボット指令部93からダンパ支持ロボット5L,5Rに対して姿勢制御を指令する。ダンパ支持ロボット5L,5Rに対する姿勢制御指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0047】
この姿勢制御指令に基づいて、ダンパ支持ロボット5L,5Rは、パレット3の上昇と同期して腕部51L,51Rを上昇させる。
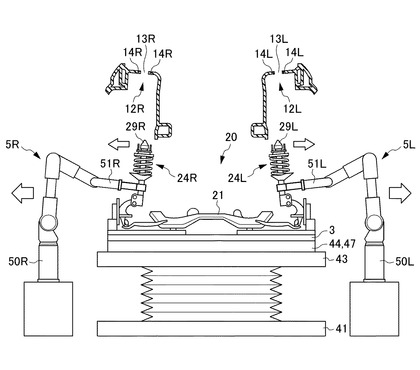
図4および図5に示すように、ダンパ支持ロボット5L,5Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、腕部51L,51Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0048】
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更をダンパ支持ロボット5L,5Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0049】
位置合わせ工程は、サスペンションアッセンブリ20が所定の高さに到達したとき、ダンパ支持ロボット5L,5Rによりダンパアッセンブリ24L,24Rの位置を調整して、ダンパ25L,25Rをボディ10のダンパ取付孔13L,13Rに位置合わせする。
【0050】
すなわち、パレット3が所定の高さからさらに上昇するのにともない、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合する。
図6(a)に示すように、パレット3の平面位置がボディ10の平面位置に対してずれていた場合、この嵌合の開始から完了までの間に、位置決めピン31L,31Rの先端テーパ部のはたらきにより、パレット3がボディ10の平面位置に一致するまで平面内で移動する。この移動は、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合を開始する高さでブレーキ46FR,46RRを解放することで、フリーベア44によりスムーズに行われる。
そして、嵌合を完了した高さでブレーキ46FR,46RRを作動させることで、パレット3は移動後の位置に固定される。
【0051】
図6(b)に示すように、このときのパレット3の移動方向および移動量(すなわち、位置変化)は、パレットセンサ6が測定して、制御装置9の位置変化検出部91を介して、リアルタイムでダンパ支持ロボット5L,5Rに伝送される。ダンパ支持ロボット5L,5Rは、位置変化検出部91からの位置変化データに基づいて、位置変化後のパレット3の正しい位置を基準とするダンパアッセンブリ24L,24Rの姿勢制御を行う。
【0052】
ダンパ支持ロボット5L,5Rによるこのダンパアッセンブリ24L,24Rの姿勢制御により、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに位置合わせされる。これと同時に、ダンパキャップ29L,29R周辺のボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに位置合わせされる。
【0053】
図8に示すように、パレット3の最後の上昇にともない、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに挿入される。このとき、図7に示すように、ダンパキャップ29L,29Rのテーパ部のはたらきにより、ダンパ取付孔13L,13Rに対して、ダンパ25L,25Rの位置が補正される。
【0054】
このダンパ25L,25Rの位置補正により、ボルト部28L,28Lおよびボルト部28R,28Rの位置も、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rの位置に対して正確に適合するように補正される。そして、この位置補正されたボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0055】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0056】
本実施形態によれば、以下のような効果がある。
(1)サスペンションアッセンブリ20を車両のボディ10に接近させていく過程でダンパ25L,25Rを含むダンパアッセンブリ24L,24Rがボディ10側と干渉する場合でも、ダンパ支持ロボット5L,5Rがダンパアッセンブリ24L,24Rの位置(姿勢)変更を行うことで、その干渉を回避することができる。
【0057】
(2)パレット3の位置決めピン31L,31Rがボディ10の位置決め孔15L,15Rと嵌合したとき測定したパレット3の位置(位置変化)に応じて、ダンパ25L,25Rを含むダンパアッセンブリ24L,24Rをダンパ取付孔13L,13Rに位置合わせすることができる。
【0058】
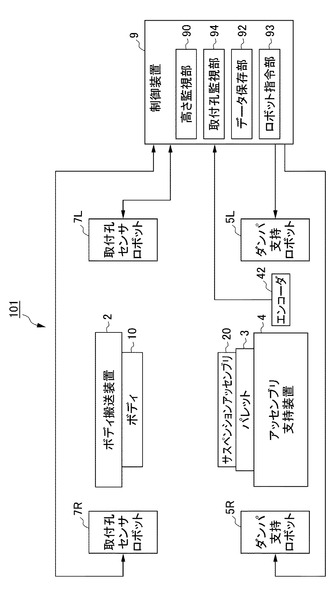
図9は、本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム101を示すブロック図である。本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム101を用いて実施される。なお、図1に示すマウントシステム1と同様の部分には、図1で用いた符号と同一の符号を付けて示し、重複する説明は省略する。
【0059】
マウントシステム101は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、支持装置としてのダンパ支持ロボット5、取付孔センサロボット7、および制御装置9で構成される。
【0060】
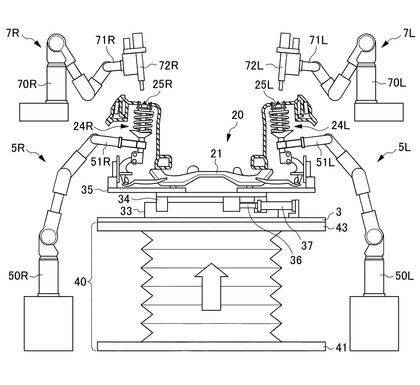
図10に示すように、取付孔センサロボット7L,7Rは、ボディ10のダンパ取付孔13L,13Rの位置を測定する。取付孔センサロボット7L,7Rは、いわゆる多関節ロボットであり、ダンパ支持ロボット5L,5Rの上方において適宜高さの設置面に設置されている。取付孔センサロボット7L,7Rと、ダンパ支持ロボット5L,5Rとは、互いに共通の空間座標を有している。取付孔センサロボット7L,7Rは、ロボット本体70L,70Rから延びる多段のアームを備え、先端の腕部71L,71Rには、センサユニット72L,72Rが取り付けられている。
【0061】
センサユニット72L,72Rは、いずれも、CCDセンサおよび距離センサを備えている。センサユニット72L,72RのCCDセンサは、ダンパ取付孔13L,13Rの2次元平面内における位置をそれぞれ検出する。また、センサユニット72L,72Rの距離センサは、それぞれ、レーザ光をダンパ取付孔13L,13Rに射出し、その反射光を検出することにより、各光源からダンパ取付孔13L,13Rまでの距離を計測する。これにより、センサユニット72L,72Rは、ボディ10のダンパ取付孔13L,13Rの3次元空間内における位置をそれぞれ測定する。センサユニット72L,72Rは、それぞれ測定したダンパ取付孔13L,13Rの位置データを、制御装置9の取付孔監視部94に出力する。
【0062】
アッセンブリ支持装置4は、フリーベア44およびスライドテーブル47を備えておらず、リフタ40の昇降台43の上面に直接パレット3が載置される。
【0063】
パレット3は、車幅方向に沿って延びるスライドレール33と、スライドレール33に沿って摺動するスライドガイド34が形成されたテーブル35とを備える。テーブル35には、サスペンションアッセンブリ20が搭載される。これにより、パレット3は、テーブル35をサスペンションアッセンブリ20とともに、車幅方向に沿って摺動させることが可能となっている。
【0064】
パレット3は、ピストンロッド36をスライドレール33に沿って進退させ、所定の位置で停止させるシリンダ37を備える。ピストンロッド36の先端部は、テーブル35に連結されている。これにより、テーブル35およびサスペンションアッセンブリ20の車幅方向に沿った位置は、制御されることが可能である。シリンダ37は、制御装置9に接続され、制御装置9からの制御信号に基づいて動作する。
【0065】
上記のようなマウントシステム101を用いて、本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0066】
取付孔センサロボット7L,7Rのセンサユニット72L,72Rは、ボディ10のダンパ取付孔13L,13Rの位置をそれぞれ測定する。センサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データは、制御装置9の取付孔監視部94に伝送される。
【0067】
サスペンションアッセンブリ20はテーブル35の所定位置に搭載され、テーブル35はパレット3上の所定位置に固定される。このテーブル35の位置は、シリンダ37により決定される。この場合、センサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データを用いて、テーブル35の位置を決定することができる。
【0068】
アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0069】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ロボット指令部93からダンパ支持ロボット5L,5Rに対して姿勢制御を指令する。ダンパ支持ロボット5L,5Rに対する姿勢制御指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0070】
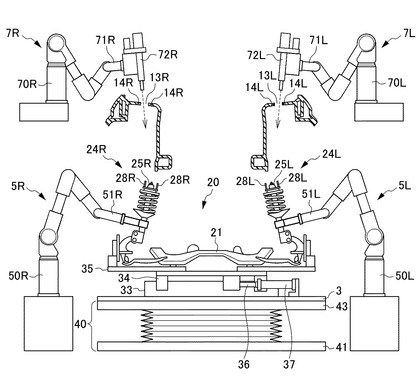
この姿勢制御指令に基づいて、ダンパ支持ロボット5L,5Rは、パレット3の上昇と同期して腕部51L,51Rを上昇させる。
図10および図11に示すように、ダンパ支持ロボット5L,5Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、腕部51L,51Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0071】
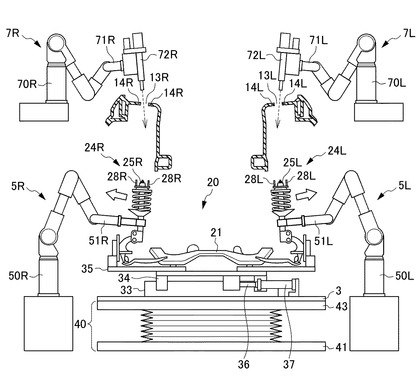
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更をダンパ支持ロボット5L,5Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0072】
その後、センサユニット72L,72Rが測定するダンパ取付孔13L,13Rの位置データに基づいて、ダンパアッセンブリ24L,24Rの位置を調整する。ダンパ取付孔13L,13Rの位置データを用いることで、ダンパ25L,25Rの先端をダンパ取付孔13L,13Rに正確に位置合わせすることができる。そのためこの場合、ダンパ25L,25R先端にダンパキャップ29L,29Rを取り付けることは不要である。また、ダンパ25L,25Rの先端周辺のボルト部28L,28Lおよびボルト部28R,28Rを、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに正確に位置合わせすることができる。
【0073】
図12に示すように、パレット3の最後の上昇にともない、ダンパ25L,25の先端はダンパ取付孔13L,13Rに挿入される。また、ボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0074】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0075】
本実施形態によれば、上記(1)の効果に加えて以下のような効果がある。
(3)取付孔センサロボット7L,7Rのセンサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データに基づいて、ダンパ25L,25Rをダンパ取付孔13L,13Rに位置合わせすることができる。ダンパ取付孔13L,13Rの実際の位置データに基づいてダンパ25L,25Rを直接位置合わせするため、正確な位置合わせが可能となる。
(4)ダンパ25L,25Rをダンパ取付孔13L,13Rに位置合わせしながら挿入する際に、ダンパ25L,25R先端に位置補正のためのダンパキャップ29L,29Rを取り付けることが不要である。
【0076】
図13は、本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム201を示すブロック図である。本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム201を用いて実施される。なお、図1に示すマウントシステム1と同様の部分には、図1で用いた符号と同一の符号を付けて示し、重複する説明は省略する。
【0077】
マウントシステム201は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、パレットセンサ6、支持装置としてのダンパ支持装置8、および制御装置9で構成される。
【0078】
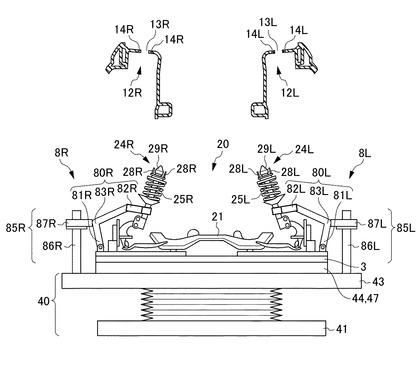
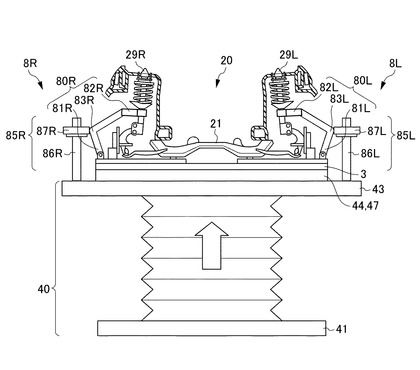
図14に示すように、ダンパ支持装置8L,8Rは、ダンパホルダ80L,80R、およびホルダ作動機構85L,85Rを備える。ダンパホルダ80L,80Rは、基部81L,81Rがパレット3に揺動可能に取り付けられている。ダンパホルダ80Lは、車両の前後方向と平行な軸を中心として揺動可能であり、しかも、図中右回りに揺動するように付勢されている。ダンパホルダ80Rも、車両の前後方向と平行な軸を中心として揺動可能であるが、図中左回りに揺動するように付勢されている。
【0079】
ダンパホルダ80L,80Rの先部82L,82Rは、ダンパアッセンブリ24L,24Rを支持する。ダンパホルダ80L,80Rは、ダンパアッセンブリ24L,24Rの位置(姿勢)を変更できるように、車両の前方から見て、先部82L,82Rが左右に揺動可能で、しかも、互いに間隔を拡げる方向に付勢した状態でパレット3に取り付けられている。また、ダンパホルダ80L,80Rは、基部81L,81Rと先部82L,82Rとの中間に、外方へ屈曲した屈曲部83L,83Rを備えている。
【0080】
ホルダ作動機構85L,85Rは、パレット3の左右外方でリフタ40の昇降台43に立設された支柱部材86L,86Rと、支柱部材86L,86Rの所定高さに取り付けられた作動部材87L,87Rとを備える。作動部材87L,87Rは、ダンパホルダ80L,80Rの揺動面内において屈曲部83L,83Rの高さに配置される。作動部材87L,87Rは、図示しない駆動装置の作動により車幅方向に沿って移動され、車幅方向に沿って任意の位置で停止できるように構成されている。
【0081】
作動部材87Lの先端部(図中左端部)は、ダンパホルダ80Lの屈曲部83Lに作用する。作動部材87Lを任意の位置に移動して停止させることで、ダンパホルダ80Lの先部82Lの位置を相応する位置に位置決めすることができる。これにより、ダンパアッセンブリ24Lの位置(姿勢)を、ダンパホルダ80Lの揺動面内において任意に変更できる。
【0082】
作動部材87Rの先端部(図中右端部)は、ダンパホルダ80Rの屈曲部83Rに作用する。作動部材87Rを任意の位置に移動して停止させることで、ダンパホルダ80Rの先部82Rの位置を相応する位置に位置決めすることができる。これにより、ダンパアッセンブリ24Rの位置(姿勢)を、ダンパホルダ80Rの揺動面内において任意に変更できる。
【0083】
上記のようなマウントシステム201を用いて、本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0084】
干渉回避工程は、パレット3の上昇と同期させて、ダンパ支持装置8L,8Rの作動部材87L,87Rによりダンパホルダ80L,80Rが支持するダンパアッセンブリ24L,24Rの位置を必要に応じて変更することで、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0085】
サスペンションアッセンブリ20はパレット3の所定位置に搭載され、パレット3はアッセンブリ支持装置4のスライドテーブル47上の所定位置に固定される。アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0086】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ダンパ作動指令部95からダンパ支持装置8L,8Rの作動部材87L,87Rに対して1軸作動を指令する。すなわち、車幅方向に沿って所定の位置に移動して停止させる作動を指令する。ダンパ支持装置8L,8Rの作動部材87L,87Rに対する1軸作動指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0087】
この1軸作動指令に基づいて、ダンパ支持装置8L,8Rは、パレット3の上昇と同期して作動部材87L,87Rを作動させる。
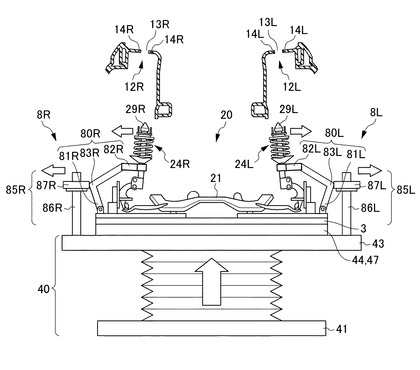
図14および図15に示すように、ダンパ支持装置8L,8Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、作動部材87L,87Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0088】
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更を、ダンパ支持装置8L,8Rの作動部材87L,87Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0089】
位置合わせ工程は、サスペンションアッセンブリ20が所定の高さに到達したとき、ダンパ支持装置8L,8Rの作動部材87L,87Rによりダンパアッセンブリ24L,24Rの位置を調整して、ダンパ25L,25Rをボディ10のダンパ取付孔13L,13Rに位置合わせする。
これは、データ保存部92のティーチングデータに基づいて行うことができる。また、第1実施形態に記載したように、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合するときのパレット3の位置変化を、パレットセンサ6が測定し、この位置変化に基づいて行うこともできる。
【0090】
図16に示すように、パレット3の最後の上昇にともない、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに挿入される。また、ボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0091】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0092】
本実施形態によれば、上記(1)の効果に加えて以下のような効果がある。
(5)ダンパ支持装置8L,8Rは、ダンパホルダ80L,80Rをその揺動面内で揺動させるだけの1軸作動のものである。そのため、ダンパ支持ロボット5L,5Rのような多関節ロボットに比べて、構成がシンプルであり、低コストで実現可能である。
【符号の説明】
【0093】
2…ボディ搬送装置
3…パレット
4…アッセンブリ支持装置
5L,5R…ダンパ支持ロボット(支持装置)
6…パレットセンサ
7L,7R…取付孔センサロボット
8L,8R…ダンパ支持装置(支持装置)
9…制御装置
10…ボディ
20…サスペンションアッセンブリ
13L,13R…ダンパ取付孔
15L,15R…位置決め孔
24L,24R…ダンパアッセンブリ
25L,25R…ダンパ
31L,31R…位置決めピン
【技術分野】
【0001】
本発明は、サスペンションアッセンブリ取り付け方法に関する。詳しくは、サスペンションアッセンブリを車両に取り付けるため車両ボディに接近させていく過程で、起こり得るダンパと車両ボディ側との干渉を回避するサスペンションアッセンブリ取り付け方法に関する。
【背景技術】
【0002】
従来から、車両の製造ラインでは、サスペンションアッセンブリをボディに取り付けることが行われている。サスペンションアッセンブリは、フロント側あるいはリア側の左右一対のダンパの下端側をサブフレームで連結してアッセンブリ化したものである。この一対のダンパの上端側を、車両ボディに形成された左右一対のダンパ取付孔に取り付けることで、サスペンションアッセンブリが車両ボディに取り付けられる。
【0003】
サスペンションアッセンブリを車両ボディに取り付けるときには、サスペンションアッセンブリを車両ボディに接近させていく。この接近工程中、左右一対のダンパの姿勢を支持しながら、ダンパの上端側を車両ボディの左右一対のダンパ取付孔にそれぞれ位置合わせする装置が必要であり、従来からさまざまな方法が提案されている。
【0004】
例えば、引用文献1には、サスペンションアッセンブリを載置するパレット上に把持具を設置し、この把持具によりダンパをパレットに対して固定した位置に把持した状態で、ダンパ取付孔に取り付ける方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3904713号公報
【0006】
【特許文献2】特開2007−69826号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、引用文献1に記載の方法では、ダンパの位置はパレットに対して固定した状態に保たれるため、例えば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合は、この方法を採用することができないという課題がある。
【0008】
本発明は、上述の課題に鑑みてなされたものであり、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のサスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ(例えば、後述のサスペンションアッセンブリ20)を車両のボディ(例えば、後述のボディ10)に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット(例えば、後述のパレット3)の上昇と同期させて、ダンパ(例えば、後述のダンパ25L,25R)を支持する支持装置(例えば、後述のダンパ支持ロボット5L,5R)により当該ダンパの位置を必要に応じて変更することで、前記ボディに対する前記ダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、前記支持装置により前記ダンパを前記ボディの所定のダンパ取付孔(例えば、後述のダンパ取付孔13L,13R)に位置合わせする位置合わせ工程と、を含むことを特徴とする。
【0010】
この発明によれば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避することができ、サスペンションアッセンブリを車両に取り付けることができる。
【0011】
この場合、前記パレットは、前記ボディの所定位置にある位置決め孔(例えば、後述の位置決め孔15L,15R)と嵌合することにより位置決め可能な位置決めピン(例えば、後述の位置決めピン31L,31R)を有しており、前記位置合わせ工程は、前記位置決めピンが前記位置決め孔と嵌合したときの前記パレットの位置を測定し、測定した前記パレットの位置を前記支持装置に伝送し、伝送された前記パレットの位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることが好ましい。
【0012】
この発明によれば、上述の効果と同様の効果がある。また、位置決めピンが位置決め孔と嵌合したとき測定したパレットの位置に応じて、ダンパをダンパ取付孔に位置合わせすることができる。
【0013】
この場合、前記位置合わせ工程は、前記ダンパ取付孔の位置を測定し、測定した前記ダンパ取付孔の位置を前記支持装置に伝送し、伝送された前記ダンパ取付孔の位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることが好ましい。
【0014】
この発明によれば、上述の効果と同様の効果がある。また、測定したダンパ取付孔の位置に応じて、ダンパをダンパ取付孔に位置合わせすることができる。
【発明の効果】
【0015】
本発明によれば、サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避することができ、サスペンションアッセンブリを車両に取り付けることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図2】前記実施形態に係るボディおよびサスペンションアッセンブリの構成を示す正面から見た模式図である。
【図3】前記実施形態に係るアッセンブリ支持装置の構成を示す側面から見た模式図である。
【図4】前記実施形態に係る上昇工程を示す模式図である。
【図5】前記実施形態に係る干渉回避工程を示す模式図である。
【図6】前記実施形態に係る位置合わせ工程を示す模式図である。
【図7】前記実施形態に係る位置合わせ工程を示す拡大図である。
【図8】前記実施形態に係る取り付け工程を示す模式図である。
【図9】本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図10】前記実施形態に係る上昇工程を示す模式図である。
【図11】前記実施形態に係る干渉回避工程を示す模式図である。
【図12】前記実施形態に係る位置合わせ工程および取り付け工程を示す模式図である。
【図13】本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステムを示すブロック図である。
【図14】前記実施形態に係る上昇工程を示す模式図である。
【図15】前記実施形態に係る干渉回避工程を示す模式図である。
【図16】前記実施形態に係る位置合わせ工程および取り付け工程を示す模式図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について、図面を参照しながら説明する。
図1は、本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム1を示すブロック図である。本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム1を用いて実施される。
【0018】
マウントシステム1は、車両のボディ10の所定の位置に、サスペンションアッセンブリ20を取り付けるものであり、車両の製造ラインの一部に設けられる。マウントシステム1は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、支持装置としてのダンパ支持ロボット5、パレットセンサ6、および制御装置9で構成される。
【0019】
ボディ搬送装置2は、ボディ10を懸架して搬送する。パレット3は、サスペンションアッセンブリ20を搭載する。アッセンブリ支持装置4は、パレット3を載置してサスペンションアッセンブリ20を支持する。ダンパ支持ロボット5は、パレット3およびアッセンブリ支持装置4の外方に設置されてダンパを支持する。パレットセンサ6は、パレット3の位置(位置変化)を測定する。制御装置9は、これらを制御する。
なお、符号に付けるL,R,FR,RRの文字はそれぞれ、車両から見て左、右、前、後を表す。
【0020】
図2は、ボディ10およびサスペンションアッセンブリ20の構成を示す正面から見た模式図である。サスペンションアッセンブリ20は、車両の下回りを構成するものである。サスペンションアッセンブリ20は、左右の前輪が取り付けられるフロント側のサスペンションアッセンブリと、左右の後輪が取り付けられるリア側のサスペンションアッセンブリとで構成される。図2では、フロント側のサスペンションアッセンブリ20の構成のみを示す。
【0021】
サスペンションアッセンブリ20は、サブフレーム21をベースとして、複数の部品を概ね左右対称に組み合わせて構成される。サブフレーム21の左右両側には、左右一対のロアアーム22L,22R、ハブ23L,23R、およびダンパアッセンブリ24L,24Rが組み付けられる。サブフレーム21のほぼ中央には、図示しないエンジンが組み付けられる。ハブ23L,23Rには、後工程において図示しない一対の前輪が取り付けられる。
【0022】
ダンパアッセンブリ24Lは、ほぼ棒状のダンパ25Lと、ダンパ25Lにほぼ同心状に設けられたスプリング26Lと、ダンパアッセンブリ24Lの上端側を構成するダンパマウント27Lとを備える。同様に、ダンパアッセンブリ24Rは、ほぼ棒状のダンパ25Rと、ダンパ25Rにほぼ同心状に設けられたスプリング26Rと、ダンパアッセンブリ24Rの上端側を構成するダンパマウント27Rとを備える。ダンパアッセンブリ24L,24Rの下端側は、ロアアーム22L,22Rをそれぞれ介してサブフレーム21の両端側に連結されている。
【0023】
ダンパマウント27Lには、ダンパ25Lとほぼ平行に延びる複数のボルト部28L,28Lが立設されている。同様に、ダンパマウント27Rには、ダンパ25Rとほぼ平行に延びる複数のボルト部28R,28Rが立設されている。
【0024】
ダンパマウント27L,27Rの中央には、ダンパキャップ29L,29Rがそれぞれ着脱自在に取り付けられている。ダンパキャップ29L,29Rは、いずれも円錐状に形成されており、後述するダンパ取付孔13L,13Rに挿入する際のガイド部材となっている。
【0025】
ボディ10は、車両を構成する基礎フレームであり、エンジンが収容されるエンジンルーム11を備えている。エンジンルーム11の左右両側には、左右一対のダンパハウジング12L,12Rが形成されている。ダンパハウジング12L,12Rには、ダンパアッセンブリ24L,24Rがそれぞれ収納される。
【0026】
ダンパハウジング12Lには、ダンパアッセンブリ24Lのダンパキャップ29Lが挿入されるダンパ取付孔13L、および、ボルト部28L,28Lがそれぞれ挿入されるボルト挿入孔14L,14Lが形成されている。同様に、ダンパハウジング12Rには、ダンパアッセンブリ24Rのダンパキャップ29Rが挿入されるダンパ取付孔13R、および、ボルト部28R,28Rがそれぞれ挿入されるボルト挿入孔14R,14Rが形成されている。ダンパ取付孔13L,13R、およびボルト挿入孔14L,14Rは、ボディ10の中心に対して左右対称に形成されている。特に、ダンパ取付孔13L,13Rは、ボディ10の姿勢の基準となる。
【0027】
ボディ10の所定位置には、後述する左右一対の位置決め孔15L,15R(図6参照)が形成されている。ボディ10は、ボディ搬送装置2の図示しないハンガーに懸架された状態で、サスペンションアッセンブリ20の上方に搬送される。
【0028】
図3は、アッセンブリ支持装置4の構成を示す側面から見た模式図である。アッセンブリ支持装置4は、サスペンションアッセンブリ20を搭載するパレット3を載置して支持するものである。アッセンブリ支持装置4は、リフタ40と、パレット3を所定位置に載置して支持するスライドテーブル47とを備える。
【0029】
リフタ40は、床面に設置されるベース41に対して昇降可能な昇降台43を備え、図示しない駆動装置の作動により昇降台43を昇降させる。昇降台43の高さは、駆動装置と連動するエンコーダ42が測定する。昇降台43の高さデータを表すエンコーダ42の出力信号は、制御装置9の高さ監視部90に常時伝送される。
【0030】
昇降台43の上面には、フリーベア44が設置されている。フリーベア44は、同一平面上にある多数のボール45が支持体により回転自在に支持されたものである。フリーベア44は、前方側および後方側にエア駆動式のブレーキ46FR,46RRをそれぞれ備えている。ブレーキ46FR,46RRは、いずれも断面凹溝状のものであり、車幅方向に沿って互いに平行に延び、凹溝どうしを互いに対向させて配置されている。
【0031】
スライドテーブル47は、フリーベア44上に配置され、フリーベア44により下面を多数の点で支持される。スライドテーブル47は、車両の前方側および後方側にフランジ部48FR,48RRをそれぞれ備えている。フランジ部48FR,48RRは、フリーベア44のブレーキ46FR,46RRにそれぞれ対応する。
【0032】
スライドテーブル47のフランジ部48FR,48RRは、フリーベア44のブレーキ46FR,46RRの互いに対向する凹溝内に配置される。スライドテーブル47は、フリーベア44により、ブレーキ46FR,46RRと平行な車幅方向に沿って移動自在に支持される。
【0033】
スライドテーブル47の前方フランジ部48FRの前端縁から後方フランジ部48RRの後端縁までの長さは、フリーベア44の前方ブレーキ46FRの凹溝前端から後方ブレーキ46RRの凹溝後端までの長さに比べて、短く形成されている。スライドテーブル47は、フリーベア44により、この長さの差分だけ車両の前後方向に移動自在に支持される。
【0034】
ブレーキ46FR,46RRは、解放状態にあるとき、スライドテーブル47のフランジ部48FR,48RRに対して何ら作用を及ぼさない。この場合、スライドテーブル47は、フリーベア44上を車幅方向に自由に移動することができる。スライドテーブル47は、フリーベア44上を車両の前後方向にも所定の範囲で自由に移動することができる。したがって、スライドテーブル47は、フリーベア44上を所定の範囲で角度変更(回動)することもできる。
【0035】
ブレーキ46FR,46RRは、作動状態にあるとき、エア圧により、スライドテーブル47のフランジ部48FR,48RRに対して移動を阻止するブレーキ作用を及ぼす。この場合、スライドテーブル47は、フリーベア44上での移動がロックされ、リフタ40の昇降台43に対して固定される。
【0036】
スライドテーブル47は、パレット3の底面に形成した嵌合孔30と嵌合する固定ピン49を備えている。固定ピン49が嵌合孔30と嵌合することで、パレット3はスライドテーブル47上の所定位置に固定される。
【0037】
パレット3は、図6(a)に示すように、位置決めピン31L,31Rを備えている。位置決めピン31L,31Rは、ボディ10の位置決め孔15L,15Rと嵌合することにより、ボディ10に対してパレット3を位置決めする。位置決めピン31L,31Rは、サスペンションアッセンブリ20が上昇して所定の高さに到達したとき、ボディ10の位置決め孔15L,15Rと嵌合する。
【0038】
ダンパ支持ロボット5L,5Rは、いわゆる多関節ロボットであり、アッセンブリ支持装置4の左右両側において床面に設置されている。ダンパ支持ロボット5L,5Rは、ロボット本体50L,50Rから延びる多段のアームを備え、先端の腕部51L,51Rは、サスペンションアッセンブリ20に下端側が連結された左右一対のダンパアッセンブリ24L,24Rの姿勢を支える。
【0039】
パレットセンサ6は、図6に示すように、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合したときのパレット3の平面的な位置を測定する。すなわち、パレットセンサ6は、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前のパレット3の平面的な位置と、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合した後のパレット3の平面的な位置との変化を測定する。このように、パレット3の上昇にともなう平面的な位置変化を測定するパレットセンサ6は、例えば、パレット3の縦横両辺に配置した複数の測定器60a,60b,60c,60dで構成される。各測定器60は、パレット3に非接触で測定できるものであり、例えば、赤外線センサ、レーザ距離計等を用いることができる。
【0040】
パレットセンサ6が測定した、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前後のパレット3の位置変化は、位置変化データとして制御装置9の位置変化検出部91に伝送され、さらにダンパ支持ロボット5L,5Rに伝送される。ダンパ支持ロボット5L,5Rは、制御装置9から伝送されるパレット3の位置変化に応じて、ダンパアッセンブリ24L,24Rの位置を変更する。これについては後述する。
【0041】
制御装置9は、高さ監視部90と、位置変化検出部91と、データ保存部92と、ロボット指令部93とを備える。高さ監視部90は、リフタ40と連動するエンコーダ42からの出力信号により、昇降台43の高さデータを常時監視する。位置変化検出部91は、パレットセンサ6により測定される、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合する前後のパレット3の位置変化データを検出する。データ保存部92は、パレット3の上昇過程において、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さおよび方向、並びに、その干渉を回避するためにダンパアッセンブリ24L,24Rがとるべき姿勢について、あらかじめティーチングして取得したデータを保存する。
【0042】
ロボット指令部93は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら、データ保存部92のティーチングデータに基づいて、ダンパ支持ロボット5L,5Rに対して姿勢制御指令を出力する。また、ロボット指令部93は、位置変化検出部91が検出したパレット3の位置変化データをリアルタイムでダンパ支持ロボット5L,5Rに出力する。
【0043】
上記のようなマウントシステム1を用いて、本発明の第1実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0044】
干渉回避工程は、パレット3の上昇と同期させて、ダンパ支持ロボット5L,5Rの腕部51L,51Rによりダンパアッセンブリ24L,24Rの位置(姿勢)を必要に応じて変更することで、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0045】
サスペンションアッセンブリ20はパレット3の所定位置に搭載され、パレット3はアッセンブリ支持装置4のスライドテーブル47上の所定位置に固定される。アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0046】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ロボット指令部93からダンパ支持ロボット5L,5Rに対して姿勢制御を指令する。ダンパ支持ロボット5L,5Rに対する姿勢制御指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0047】
この姿勢制御指令に基づいて、ダンパ支持ロボット5L,5Rは、パレット3の上昇と同期して腕部51L,51Rを上昇させる。
図4および図5に示すように、ダンパ支持ロボット5L,5Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、腕部51L,51Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0048】
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更をダンパ支持ロボット5L,5Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0049】
位置合わせ工程は、サスペンションアッセンブリ20が所定の高さに到達したとき、ダンパ支持ロボット5L,5Rによりダンパアッセンブリ24L,24Rの位置を調整して、ダンパ25L,25Rをボディ10のダンパ取付孔13L,13Rに位置合わせする。
【0050】
すなわち、パレット3が所定の高さからさらに上昇するのにともない、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合する。
図6(a)に示すように、パレット3の平面位置がボディ10の平面位置に対してずれていた場合、この嵌合の開始から完了までの間に、位置決めピン31L,31Rの先端テーパ部のはたらきにより、パレット3がボディ10の平面位置に一致するまで平面内で移動する。この移動は、位置決めピン31L,31Rが位置決め孔15L,15Rと嵌合を開始する高さでブレーキ46FR,46RRを解放することで、フリーベア44によりスムーズに行われる。
そして、嵌合を完了した高さでブレーキ46FR,46RRを作動させることで、パレット3は移動後の位置に固定される。
【0051】
図6(b)に示すように、このときのパレット3の移動方向および移動量(すなわち、位置変化)は、パレットセンサ6が測定して、制御装置9の位置変化検出部91を介して、リアルタイムでダンパ支持ロボット5L,5Rに伝送される。ダンパ支持ロボット5L,5Rは、位置変化検出部91からの位置変化データに基づいて、位置変化後のパレット3の正しい位置を基準とするダンパアッセンブリ24L,24Rの姿勢制御を行う。
【0052】
ダンパ支持ロボット5L,5Rによるこのダンパアッセンブリ24L,24Rの姿勢制御により、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに位置合わせされる。これと同時に、ダンパキャップ29L,29R周辺のボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに位置合わせされる。
【0053】
図8に示すように、パレット3の最後の上昇にともない、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに挿入される。このとき、図7に示すように、ダンパキャップ29L,29Rのテーパ部のはたらきにより、ダンパ取付孔13L,13Rに対して、ダンパ25L,25Rの位置が補正される。
【0054】
このダンパ25L,25Rの位置補正により、ボルト部28L,28Lおよびボルト部28R,28Rの位置も、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rの位置に対して正確に適合するように補正される。そして、この位置補正されたボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0055】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0056】
本実施形態によれば、以下のような効果がある。
(1)サスペンションアッセンブリ20を車両のボディ10に接近させていく過程でダンパ25L,25Rを含むダンパアッセンブリ24L,24Rがボディ10側と干渉する場合でも、ダンパ支持ロボット5L,5Rがダンパアッセンブリ24L,24Rの位置(姿勢)変更を行うことで、その干渉を回避することができる。
【0057】
(2)パレット3の位置決めピン31L,31Rがボディ10の位置決め孔15L,15Rと嵌合したとき測定したパレット3の位置(位置変化)に応じて、ダンパ25L,25Rを含むダンパアッセンブリ24L,24Rをダンパ取付孔13L,13Rに位置合わせすることができる。
【0058】
図9は、本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム101を示すブロック図である。本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム101を用いて実施される。なお、図1に示すマウントシステム1と同様の部分には、図1で用いた符号と同一の符号を付けて示し、重複する説明は省略する。
【0059】
マウントシステム101は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、支持装置としてのダンパ支持ロボット5、取付孔センサロボット7、および制御装置9で構成される。
【0060】
図10に示すように、取付孔センサロボット7L,7Rは、ボディ10のダンパ取付孔13L,13Rの位置を測定する。取付孔センサロボット7L,7Rは、いわゆる多関節ロボットであり、ダンパ支持ロボット5L,5Rの上方において適宜高さの設置面に設置されている。取付孔センサロボット7L,7Rと、ダンパ支持ロボット5L,5Rとは、互いに共通の空間座標を有している。取付孔センサロボット7L,7Rは、ロボット本体70L,70Rから延びる多段のアームを備え、先端の腕部71L,71Rには、センサユニット72L,72Rが取り付けられている。
【0061】
センサユニット72L,72Rは、いずれも、CCDセンサおよび距離センサを備えている。センサユニット72L,72RのCCDセンサは、ダンパ取付孔13L,13Rの2次元平面内における位置をそれぞれ検出する。また、センサユニット72L,72Rの距離センサは、それぞれ、レーザ光をダンパ取付孔13L,13Rに射出し、その反射光を検出することにより、各光源からダンパ取付孔13L,13Rまでの距離を計測する。これにより、センサユニット72L,72Rは、ボディ10のダンパ取付孔13L,13Rの3次元空間内における位置をそれぞれ測定する。センサユニット72L,72Rは、それぞれ測定したダンパ取付孔13L,13Rの位置データを、制御装置9の取付孔監視部94に出力する。
【0062】
アッセンブリ支持装置4は、フリーベア44およびスライドテーブル47を備えておらず、リフタ40の昇降台43の上面に直接パレット3が載置される。
【0063】
パレット3は、車幅方向に沿って延びるスライドレール33と、スライドレール33に沿って摺動するスライドガイド34が形成されたテーブル35とを備える。テーブル35には、サスペンションアッセンブリ20が搭載される。これにより、パレット3は、テーブル35をサスペンションアッセンブリ20とともに、車幅方向に沿って摺動させることが可能となっている。
【0064】
パレット3は、ピストンロッド36をスライドレール33に沿って進退させ、所定の位置で停止させるシリンダ37を備える。ピストンロッド36の先端部は、テーブル35に連結されている。これにより、テーブル35およびサスペンションアッセンブリ20の車幅方向に沿った位置は、制御されることが可能である。シリンダ37は、制御装置9に接続され、制御装置9からの制御信号に基づいて動作する。
【0065】
上記のようなマウントシステム101を用いて、本発明の第2実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0066】
取付孔センサロボット7L,7Rのセンサユニット72L,72Rは、ボディ10のダンパ取付孔13L,13Rの位置をそれぞれ測定する。センサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データは、制御装置9の取付孔監視部94に伝送される。
【0067】
サスペンションアッセンブリ20はテーブル35の所定位置に搭載され、テーブル35はパレット3上の所定位置に固定される。このテーブル35の位置は、シリンダ37により決定される。この場合、センサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データを用いて、テーブル35の位置を決定することができる。
【0068】
アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0069】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ロボット指令部93からダンパ支持ロボット5L,5Rに対して姿勢制御を指令する。ダンパ支持ロボット5L,5Rに対する姿勢制御指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0070】
この姿勢制御指令に基づいて、ダンパ支持ロボット5L,5Rは、パレット3の上昇と同期して腕部51L,51Rを上昇させる。
図10および図11に示すように、ダンパ支持ロボット5L,5Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、腕部51L,51Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0071】
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更をダンパ支持ロボット5L,5Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0072】
その後、センサユニット72L,72Rが測定するダンパ取付孔13L,13Rの位置データに基づいて、ダンパアッセンブリ24L,24Rの位置を調整する。ダンパ取付孔13L,13Rの位置データを用いることで、ダンパ25L,25Rの先端をダンパ取付孔13L,13Rに正確に位置合わせすることができる。そのためこの場合、ダンパ25L,25R先端にダンパキャップ29L,29Rを取り付けることは不要である。また、ダンパ25L,25Rの先端周辺のボルト部28L,28Lおよびボルト部28R,28Rを、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに正確に位置合わせすることができる。
【0073】
図12に示すように、パレット3の最後の上昇にともない、ダンパ25L,25の先端はダンパ取付孔13L,13Rに挿入される。また、ボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0074】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0075】
本実施形態によれば、上記(1)の効果に加えて以下のような効果がある。
(3)取付孔センサロボット7L,7Rのセンサユニット72L,72Rが測定したダンパ取付孔13L,13Rの位置データに基づいて、ダンパ25L,25Rをダンパ取付孔13L,13Rに位置合わせすることができる。ダンパ取付孔13L,13Rの実際の位置データに基づいてダンパ25L,25Rを直接位置合わせするため、正確な位置合わせが可能となる。
(4)ダンパ25L,25Rをダンパ取付孔13L,13Rに位置合わせしながら挿入する際に、ダンパ25L,25R先端に位置補正のためのダンパキャップ29L,29Rを取り付けることが不要である。
【0076】
図13は、本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施するためのサスペンションアッセンブリのマウントシステム201を示すブロック図である。本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法は、このマウントシステム201を用いて実施される。なお、図1に示すマウントシステム1と同様の部分には、図1で用いた符号と同一の符号を付けて示し、重複する説明は省略する。
【0077】
マウントシステム201は、ボディ搬送装置2、パレット3、アッセンブリ支持装置4、パレットセンサ6、支持装置としてのダンパ支持装置8、および制御装置9で構成される。
【0078】
図14に示すように、ダンパ支持装置8L,8Rは、ダンパホルダ80L,80R、およびホルダ作動機構85L,85Rを備える。ダンパホルダ80L,80Rは、基部81L,81Rがパレット3に揺動可能に取り付けられている。ダンパホルダ80Lは、車両の前後方向と平行な軸を中心として揺動可能であり、しかも、図中右回りに揺動するように付勢されている。ダンパホルダ80Rも、車両の前後方向と平行な軸を中心として揺動可能であるが、図中左回りに揺動するように付勢されている。
【0079】
ダンパホルダ80L,80Rの先部82L,82Rは、ダンパアッセンブリ24L,24Rを支持する。ダンパホルダ80L,80Rは、ダンパアッセンブリ24L,24Rの位置(姿勢)を変更できるように、車両の前方から見て、先部82L,82Rが左右に揺動可能で、しかも、互いに間隔を拡げる方向に付勢した状態でパレット3に取り付けられている。また、ダンパホルダ80L,80Rは、基部81L,81Rと先部82L,82Rとの中間に、外方へ屈曲した屈曲部83L,83Rを備えている。
【0080】
ホルダ作動機構85L,85Rは、パレット3の左右外方でリフタ40の昇降台43に立設された支柱部材86L,86Rと、支柱部材86L,86Rの所定高さに取り付けられた作動部材87L,87Rとを備える。作動部材87L,87Rは、ダンパホルダ80L,80Rの揺動面内において屈曲部83L,83Rの高さに配置される。作動部材87L,87Rは、図示しない駆動装置の作動により車幅方向に沿って移動され、車幅方向に沿って任意の位置で停止できるように構成されている。
【0081】
作動部材87Lの先端部(図中左端部)は、ダンパホルダ80Lの屈曲部83Lに作用する。作動部材87Lを任意の位置に移動して停止させることで、ダンパホルダ80Lの先部82Lの位置を相応する位置に位置決めすることができる。これにより、ダンパアッセンブリ24Lの位置(姿勢)を、ダンパホルダ80Lの揺動面内において任意に変更できる。
【0082】
作動部材87Rの先端部(図中右端部)は、ダンパホルダ80Rの屈曲部83Rに作用する。作動部材87Rを任意の位置に移動して停止させることで、ダンパホルダ80Rの先部82Rの位置を相応する位置に位置決めすることができる。これにより、ダンパアッセンブリ24Rの位置(姿勢)を、ダンパホルダ80Rの揺動面内において任意に変更できる。
【0083】
上記のようなマウントシステム201を用いて、本発明の第3実施形態に係るサスペンションアッセンブリ取り付け方法を実施する手順について説明する。サスペンションアッセンブリ20を車両のボディ10に取り付ける手順は、干渉回避工程と、位置合わせ工程とを含む。
【0084】
干渉回避工程は、パレット3の上昇と同期させて、ダンパ支持装置8L,8Rの作動部材87L,87Rによりダンパホルダ80L,80Rが支持するダンパアッセンブリ24L,24Rの位置を必要に応じて変更することで、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0085】
サスペンションアッセンブリ20はパレット3の所定位置に搭載され、パレット3はアッセンブリ支持装置4のスライドテーブル47上の所定位置に固定される。アッセンブリ支持装置4のリフタ40を作動させることで、昇降台43を昇降させる。昇降台43の高さデータは、エンコーダ42からの出力信号により、制御装置9の高さ監視部90に常時伝送される。
【0086】
パレット3の上昇過程が開始すると、制御装置9は、データ保存部92のティーチングデータに基づいて、ダンパ作動指令部95からダンパ支持装置8L,8Rの作動部材87L,87Rに対して1軸作動を指令する。すなわち、車幅方向に沿って所定の位置に移動して停止させる作動を指令する。ダンパ支持装置8L,8Rの作動部材87L,87Rに対する1軸作動指令は、高さ監視部90の高さデータに基づいてパレット3の上昇と同期させながら実行される。
【0087】
この1軸作動指令に基づいて、ダンパ支持装置8L,8Rは、パレット3の上昇と同期して作動部材87L,87Rを作動させる。
図14および図15に示すように、ダンパ支持装置8L,8Rは、ダンパアッセンブリ24L,24Rがボディ10と干渉する高さに到達する前に、作動部材87L,87Rを動かしてダンパアッセンブリ24L,24Rの位置(姿勢)を変更する。これにより、ボディ10に対するダンパアッセンブリ24L,24Rの干渉を回避する。
【0088】
この干渉回避のためのダンパアッセンブリ24L,24Rの位置(姿勢)変更を、ダンパ支持装置8L,8Rの作動部材87L,87Rにより必要回数行うことで、ダンパアッセンブリ24L,24Rは、それ以上は干渉回避のための位置(姿勢)変更が不要な所定の高さまで上昇する。
【0089】
位置合わせ工程は、サスペンションアッセンブリ20が所定の高さに到達したとき、ダンパ支持装置8L,8Rの作動部材87L,87Rによりダンパアッセンブリ24L,24Rの位置を調整して、ダンパ25L,25Rをボディ10のダンパ取付孔13L,13Rに位置合わせする。
これは、データ保存部92のティーチングデータに基づいて行うことができる。また、第1実施形態に記載したように、パレット3の位置決めピン31L,31Rが、ボディ10の位置決め孔15L,15Rと嵌合するときのパレット3の位置変化を、パレットセンサ6が測定し、この位置変化に基づいて行うこともできる。
【0090】
図16に示すように、パレット3の最後の上昇にともない、ダンパ25L,25R先端のダンパキャップ29L,29Rはダンパ取付孔13L,13Rに挿入される。また、ボルト部28L,28Lおよびボルト部28R,28Rは、ボルト挿入孔14L,14Lおよびボルト挿入孔14R,14Rに挿入される。
【0091】
ボルト挿入孔14L,14Lに挿入されたボルト部28L,28L、およびボルト挿入孔14R,14Rに挿入されたボルト部28R,28Rを図示しないナットでボディ10に固定することで、サスペンションアッセンブリ20はボディ10に取り付けられる。
【0092】
本実施形態によれば、上記(1)の効果に加えて以下のような効果がある。
(5)ダンパ支持装置8L,8Rは、ダンパホルダ80L,80Rをその揺動面内で揺動させるだけの1軸作動のものである。そのため、ダンパ支持ロボット5L,5Rのような多関節ロボットに比べて、構成がシンプルであり、低コストで実現可能である。
【符号の説明】
【0093】
2…ボディ搬送装置
3…パレット
4…アッセンブリ支持装置
5L,5R…ダンパ支持ロボット(支持装置)
6…パレットセンサ
7L,7R…取付孔センサロボット
8L,8R…ダンパ支持装置(支持装置)
9…制御装置
10…ボディ
20…サスペンションアッセンブリ
13L,13R…ダンパ取付孔
15L,15R…位置決め孔
24L,24R…ダンパアッセンブリ
25L,25R…ダンパ
31L,31R…位置決めピン
【特許請求の範囲】
【請求項1】
サスペンションアッセンブリを車両のボディに取り付ける方法であって、
サスペンションアッセンブリを搭載した昇降可能なパレットの上昇と同期させて、ダンパを支持する支持装置により当該ダンパの位置を必要に応じて変更することで、前記ボディに対する前記ダンパの干渉を回避する干渉回避工程と、
サスペンションアッセンブリが所定の高さに到達したとき、前記支持装置により前記ダンパを前記ボディの所定のダンパ取付孔に位置合わせする位置合わせ工程と、
を含むことを特徴とするサスペンションアッセンブリ取り付け方法。
【請求項2】
請求項1に記載のサスペンションアッセンブリ取り付け方法において、
前記パレットは、前記ボディの所定位置にある位置決め孔と嵌合することにより位置決め可能な位置決めピンを有しており、
前記位置合わせ工程は、
前記位置決めピンが前記位置決め孔と嵌合したときの前記パレットの位置を測定し、測定した前記パレットの位置を前記支持装置に伝送し、伝送された前記パレットの位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることを特徴とするサスペンションアッセンブリ取り付け方法。
【請求項3】
請求項1に記載のサスペンションアッセンブリ取り付け方法において、
前記位置合わせ工程は、
前記ダンパ取付孔の位置を測定し、測定した前記ダンパ取付孔の位置を前記支持装置に伝送し、伝送された前記ダンパ取付孔の位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることを特徴とするサスペンションアッセンブリ取り付け方法。
【請求項1】
サスペンションアッセンブリを車両のボディに取り付ける方法であって、
サスペンションアッセンブリを搭載した昇降可能なパレットの上昇と同期させて、ダンパを支持する支持装置により当該ダンパの位置を必要に応じて変更することで、前記ボディに対する前記ダンパの干渉を回避する干渉回避工程と、
サスペンションアッセンブリが所定の高さに到達したとき、前記支持装置により前記ダンパを前記ボディの所定のダンパ取付孔に位置合わせする位置合わせ工程と、
を含むことを特徴とするサスペンションアッセンブリ取り付け方法。
【請求項2】
請求項1に記載のサスペンションアッセンブリ取り付け方法において、
前記パレットは、前記ボディの所定位置にある位置決め孔と嵌合することにより位置決め可能な位置決めピンを有しており、
前記位置合わせ工程は、
前記位置決めピンが前記位置決め孔と嵌合したときの前記パレットの位置を測定し、測定した前記パレットの位置を前記支持装置に伝送し、伝送された前記パレットの位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることを特徴とするサスペンションアッセンブリ取り付け方法。
【請求項3】
請求項1に記載のサスペンションアッセンブリ取り付け方法において、
前記位置合わせ工程は、
前記ダンパ取付孔の位置を測定し、測定した前記ダンパ取付孔の位置を前記支持装置に伝送し、伝送された前記ダンパ取付孔の位置に応じて前記支持装置が前記ダンパを前記ダンパ取付孔に位置合わせすることを特徴とするサスペンションアッセンブリ取り付け方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−20600(P2011−20600A)
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2009−168432(P2009−168432)
【出願日】平成21年7月17日(2009.7.17)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成21年7月17日(2009.7.17)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]