
サブジェクトの位置を決定する方法およびシステム
本発明の一形態によれば、サブジェクトの位置決定方法が提供される。方法は、複数の受信機のうち第1のセットの受信機でサブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、無線周波数識別タグには無線周波数識別タグIDが割り当てられており、複数の受信機のうち第2のセットの受信機で無線周波数識別タグから第2の信号を受信し、第2の信号は第1の信号とは異なり、第2のセットの受信機は第1のセットの受信機とは異なっており、第1の信号についての情報および第2の信号についての情報に基づいて位置スコアを演算し、第1の信号についての情報には第1の信号であることおよび第1のセットの受信機であることが含まれ、第2の信号についての情報には第2の信号であることおよび第2のセットの受信機であることが含まれており、位置スコアに基づいてサブジェクトの位置を決定する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般にサブジェクトの位置アイデンティティを決定する方法およびシステム、並びに無線周波数識別タグアセンブリに関する。
【背景技術】
【0002】
位置追跡システムは、例えば、病院や兵站ハブ等のエリア内の人や資産の位置を追跡するために使用される。位置追跡システムを実行するために用いられる現在の技術は、グローバル ポジショニング システム(GPS)等の信号タイミング分析の使用やビーコン信号を検出する受信機のネットワークを有するものを含む。
【0003】
GPSは、ビルの内部等のインドア環境におけるよりむしろオープンエリアにおける位置データを提供するために一般に用いられる。加えて、GPSの実行に要求されるハードウエアは比較的高コストのため実行費用の増加を招く場合がある。
【0004】
これに対し、インドア追跡環境では無線周波数(RF)受信機のネットワークによってカバーすることができる。人(員)や資産にビーコン信号を送信するモバイルRF送信機が装着される。このため、到着時間(Time of Arrival、TOA)や受信信号強度インディケータ(Received Signal Strength Indicator、RSSI)に基づいて三点測量や三角測量が追跡された人や資産の位置を得るために使用される。そのような方法は演算が多くなるため望ましくはない。
【0005】
RF受信機および送信機に代えて赤外受信機および送信機を使用することができる。赤外信号は壁を貫通できないため、赤外信号は部屋ベースでの位置確認には大変好ましい。しかしながら、赤外送信機は容易に不鮮明となるためビーコン信号の喪失を招く。
【発明の概要】
【発明が解決しようとする課題および課題を解決するための手段】
【0006】
従って、人や資産の追跡を維持するために必要なマンパワー、時間および資源を低減可能な改善された位置追跡システムおよび方法が未だに必要である。
【0007】
本発明の一態様により、サブジェクトの位置を決定する方法が提供される。その方法は、複数の受信機のうち第1のセットの受信機で前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、前記無線周波数識別タグには無線周波数識別タグIDが割り当てられており、複数の受信機のうち第2のセットの受信機で前記無線周波数識別タグから第2の信号を受信し、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なっており、前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算し、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれており、前記位置スコアに基づいて前記サブジェクトの位置を決定する、ことを含む。
【0008】
本発明の一態様により、サブジェクトの位置を決定するシステムが提供される。そのシステムは、前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信する複数の受信機のうちの第1のセットの受信機であって、前記無線周波数識別タグに無線周波数識別タグIDが割り当てられた第1のセットの受信機と、前記無線周波数識別タグから第2の信号を受信する複数の受信機のうちの第2のセットの受信機であって、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なった第2のセットの受信機と、前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算する演算ユニットであって、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれた演算ユニットと、前記位置スコアに基づいて前記サブジェクトの位置を決定する決定ユニットと、を含む。
【0009】
本発明の一態様により、無線周波数識別タグアセンブリが提供される。その無線周波数識別タグアセンブリは、第1のタグであって、第1のタグIDを有する第1のタグと、第2のタグであって、第2のタグIDおよび第2のタグ記憶部を有する第2のタグと、を含み、第1のタグIDおよび第2のタグIDが前記第2のタグの前記第2のタグ記憶部に格納されている。
【0010】
本発明の一態様により、無線周波数識別タグアセンブリが提供される。その無線周波数識別タグアセンブリは、無線周波数識別回路と、前記無線周波数識別回路に接続された通常時閉じたスイッチであって、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された通常時閉じたスイッチと、を含む。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態による、サブジェクトの位置IDを追跡するシステムのブロック図を示す。
【図2】本発明の一実施形態による無線周波数識別タグアセンブリのブロック図を示す。
【図3】本発明の一実施形態による無線周波数識別タグアセンブリの分解図を示す。
【図4】本発明の一実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。
【図5】本発明のさらなる実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。
【図6】本発明の一実施形態による、手術室(OT)複合体内での無線周波数識別タグアセンブリの実施例を示す。
【図7】本発明の一実施形態による、図6に示す手術室複合体内での無線周波数識別タグアセンブリの実施例のフローチャートを示す。
【図8】本発明の一実施形態による、粗い位置確認受信機および細かい位置確認受信機のそれぞれの呼び掛けゾーンを示す。
【図9】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のソフトウエア構成を示す。
【図10A−10G】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【図11】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のフローチャートを示す。
【図12A−12E】本発明の一実施形態による、各位置IDと予め設定されたグループの受信機との関連付けを含む、サブジェクトの位置IDを追跡する方法を示す。
【図13A−13B】本発明の一実施形態による、受信機の受信機タイプに基づく重み付けを含む、サブジェクトの位置IDを追跡する方法を示す。
【図14A−14B】本発明の一実施形態による、細かい位置確認受信機が使用され得る例を示す。
【図15A−15B】本発明の一実施形態による、位置確認上で弱および強信号データパケットを使用することの効果を示す。
【図16A−16C】本発明の一実施形態による、データタイプに基づく重み付けの割り当てを含む、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【発明を実施するための形態】
【0012】
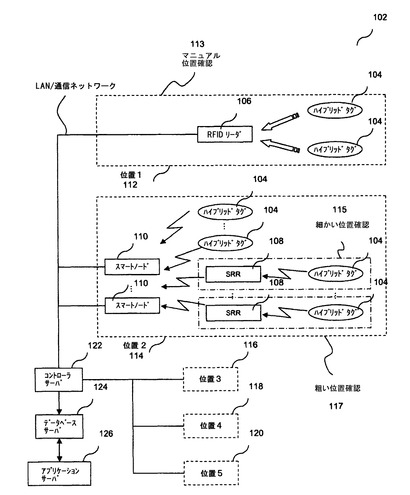
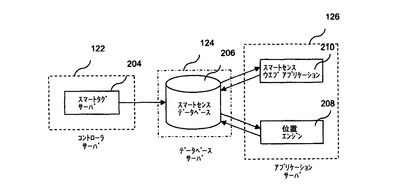
図面では、異なる視点でも参照符号は原則的に同じ部材を表している。図面は、発明の原理を描写することに重きを置き寸法にとらわれず強調した箇所もある。以下の説明では、発明の種々の実施形態が図面を参照することにより行われる。図1は、本発明の一実施形態による、サブジェクトの位置IDを追跡するシステムのブロック図を示す。システム102は、第1の位置112に位置付けられた2つの無線周波数識別(RFID)タグアセンブリ104とRFIDタグリーダ(読取機)106を含む。システム102は、さらに第2の位置114に位置付けられた複数のRFIDタグアセンブリ104、2つの細かい位置確認受信機(fine localization receivers)108および2つの粗い位置確認受信機(coarse localization receivers)を含んでいる。また、システム102は、コントローラサーバ122、データベースサーバ124およびアプリケーションサーバ126を含んでいる。さらに、システム102は、さらなる位置、第3の位置116、第4の位置118および第5の位置120も含んでいる。
【0013】
RFIDタグリーダ106は、第1の位置112においてマニュアル位置確認ゾーン(manual localization zone)113を提供する。マニュアル位置確認ゾーン113は、十分なカバレッジ(受信範囲)を提供するため第1の位置112全域に亘っており、このゾーンがRFIDタグアセンブリ104のマニュアル読み取りによるためそのように呼ばれる。細かい位置確認受信機108の各々は第2の位置114内において細かい位置確認ゾーン115を提供し、粗い位置確認受信機110の各々は第2の位置114において粗い位置確認ゾーン117を提供する。粗い位置確認ゾーン117は、十分なカバレッジを提供するため第2の位置114の全域に亘っていてもよい。システム102は、「スマートセンス位置追跡システム(SmartSense Location Tracking System)」と呼ばれる。
【0014】
RFIDタグアセンブリ104の各々は「ハイブリッドタグ」と呼ばれる。各ハイブリッドタグ104はパッシブRFIDタグおよび/またはアクティブRFIDタグを含んでいてもよい。各ハイブリッドタグ104は、例えば、人や物等のサブジェクトに装着される。各ハイブリッドタグ104は(システムや世界的に)ユニークなアイデンティティ(ID)を含み、このユニークなIDがタグ104が装着された人や物に関連付けられる。各ハイブリッドタグ104は、無線周波数(RF)手段を介して定期的にそのIDを送信する。
【0015】
「スマートノード(SmartNODE)」と呼ばれる粗い位置確認受信機110の各々は、比較的広い受信エリアすなわち位置確認ゾーンを有しており、各粗い位置確認受信機110はハイブリッドタグ104の粗い位置確認を提供するために用いられる。スマートノード110がハイブリッドタグ104のIDを受信すると、ハイブリッドタグ104は必ずスマートノード110の受信範囲内にあり、ハイブリッドタグ104が予め定められた粗い位置確認ゾーン内にあることを認識することができる。
【0016】
ハイブリッドタグ104のより特定した位置を提供するために、それぞれ「ショートレンジ受信機(Short Range receiver、SRR)と呼ばれる、少なくとも1つの細かい位置確認受信機108を用いることができる。SRR108はスマートノード110と同じ原理で作動する。各SRR108は各スマートノード110と比べてより狭い受信エリアを有しており、それ故、SRR108はハイブリッドタグ104のより細かい位置確認を提供する。
【0017】
スマートノード110およびSRR108は、受信機が表すその位置または位置IDに基づいて、一緒にグループ化され少なくとも1つの位置アイデンティティ(ID)と関連付けられる。一実施形態では、全位置が少なくとも1つのスマートノード110またはSRR108でカバーされる。ハイブリッドタグ104のIDがスマートノード110またはSRR108のいずれかで受信されれば、ハイブリッドタグ104はその位置内にある。
【0018】
上記RF追跡方法では位置誤差が許容されなければならない。ピンポイントの精度が必要なときには、ハイブリッドタグ104の位置が複数のRFIDタグリーダ106の1つを用いてマニュアルで更新される。これは、典型的にはパッシブRFIDリーダである、複数のRFIDタグリーダ106の1つを用いてIDを読むために、システムユーザが追跡された人や物と物理的にともに位置付けられる必要があることから、ピンポイントの精度と考えられる。
【0019】
スマートノード110およびRFIDタグリーダ106は、それぞれローカルエリアネットワーク(LAN)に接続されている。各スマートノード110およびRFIDタグリーダ106から受信されたデータはネットワークを介してコントローラサーバ122に送られてもよい。コントローラサーバ122は次にデータをデータサーバ124に格納する。アプリケーションサーバ126は、データベースサーバ124に格納されたデータを用い「スマートトラック(SmartTRAC)」アルゴリズムと呼ばれるソフトウエアを用いて各ハイブリッドタグ104の位置を算出(generate)する。
【0020】
一実施形態では、SRR108がRF手段を介して受信したデータを、コントローラサーバ122に送ることに代えて、スマートノード110に転送する。
【0021】
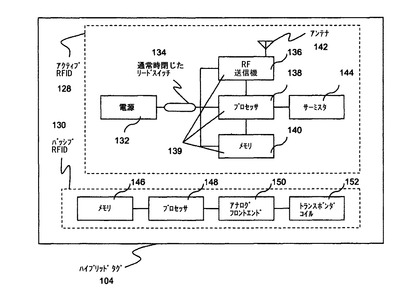
図2は、本発明の一実施形態による無線周波数識別タグアセンブリのブロック図を示す。RFIDタグアセンブリすなわちハイブリッドタグ104は、アクティブRFIDタグ部128およびパッシブRFIDタグ部130を含む。アクティブRFIDタグ部128は、電源ユニット132、通常時閉じた(NC)リードスイッチ134、RF送信機136、アクティブRFIDプロセッサ138、アクティブRFIDメモリ部140、アンテナ142およびサーミスタ144を含む。パッシブRFIDタグ部130は、パッシブRFIDメモリ部146、パッシブRFIDプロセッサ148、アナログフロントエンド(analog front end)150およびトランスポンダコイル152を含む。
【0022】
アクティブRFIDタグ部128に関して、電源ユニット132は電池素子で構成でき、アクティブRFIDタグ部128に電力を供給する。通常時閉じたリードスイッチ134は、通常状態においてスイッチが閉じられるように内蔵バイアスマグネット(inbuilt biasing magnet)を含んでいてもよい。磁界ではスイッチが閉じられるようにバイアスマグネットが作動する。通常時閉じたリードスイッチ134の一例としてはRREインディア社(RRE India limited)のR−5B−Sリードセンサが挙げられる。RF送信機136はアンテナ142を介してアクティブRFIDタグ部128からの情報を受信機に送信するために用いられる。アクティブRFIDプロセッサ138はアナログ−デジタルコンバータ(ADC)を有するマイクロコントローラを含んでいてもよい。アクティブRFIDプロセッサ138はアクティブRFIDタグ部128内でデータを処理するために使用される。アクティブRFIDタグ部128についての情報はアクティブRFIDメモリ部140に格納される。アクティブRFIDメモリ部140は、例えば、電気的に消去書き込み可能な読出し専用メモリ(EEPROM)等の不揮発性メモリを含んでいてもよい。サーミスタ144は無線の温度計としてハイブリッドタグ104の小型化を許容する。RF送信機136、アクティブRFIDプロセッサ138およびアクティブRFIDメモリ部140の組み合わせ(combination)はアクティブRFID回路139と呼ばれる。通常時閉じたリードスイッチ134はアクティブRFID回路139に接続されており、通常時閉じたリードスイッチ134は、磁界環境に置かれるとアクティブRFID回路139が電源ユニット132から電気的に切断され、磁界環境外に置かれるとアクティブRFID回路139が電源ユニット132に電気的に接続されるように構成されている。加えて、分圧回路を形成するサーミスタを用いて、サーミスタ144に掛かる電圧から温度が算出される。マイクロコントローラのADCはサーミスタ144に掛かる電圧を測定するために定期的にサーミスタ144を標本化(sample)し、マイクロコントローラは測定された電圧を用いて温度を算出する。算出された温度はRFデータパケットに繰り込まれる。
【0023】
パッシブRFIDタグ部130に関して、パッシブRFIDトランスポンダコイル152には、送信コイルおよび受信コイルを含む弱く結合した変圧器(weakly coupled transformer)を用いることができる。信号が電磁誘導により送信コイルから受信コイルに送信される。パッシブRFIDトランスポンダコイル152の目的の1つは電磁誘導手段によって信号を送受信することにある。アナログフロントエンド150は、パッシブRFIDトランスポンダコイル152で受信したアナログ信号をデジタルデータに変換し、デジタルデータをアナログ信号に変換するものである。パッシブRFIDプロセッサ148はパッシブRFIDタグ部130内でデータを処理するために用いられる。パッシブRFIDプロセッサ148は何時および何を送受信するかについて予め定められた論理を有している。パッシブRFIDタグ部130についての情報はパッシブRFIDメモリ部146に格納されている。アクティブRFIDメモリ部140と同様に、パッシブRFIDメモリ部146は例えばEEPROM等の不揮発性メモリを含んでいてもよい。
【0024】
一実施形態では、効果的なRFID位置追跡システムを実現するには、しばしば複数のRFIDタグアセンブリ104を含み、各RFIDタグアセンブリ104はアクティブRFIDタグ部128およびパッシブRFIDタグ部130を含む。アクティブRFIDタグ部128すなわちアクティブRFIDタグは電池を電源とし無線結合で動作する。情報は低周波(LF)、高周波(HF)または極高周波(UHF)を用いて送信される。パッシブRFIDタグ部130すなわちパッシブRFIDタグはRFIDタグリーダ106から電力の供給を受け電磁結合で動作する。情報はRFIDタグリーダ106からの搬送信号を変調することでRFIDタグリーダ106に返す。
【0025】
一実施形態では、例えば、EPCグローバル標準等の国際標準に適合する既製の(off-the-shelf)パッシブRFIDタグ130がアクティブRFIDタグ128とともに使用される。1つのパッシブRFIDタグ130と1つのアクティブRFIDタグ128が単一のケーシング内に配置されて単一のRFIDタグアセンブリ104を構成する。これも、「ハイブリッドタグ」104と呼ばれる。
【0026】
一実施形態では、ハイブリッドタグ104のパッシブRFIDタグ130およびアクティブRFIDタグ128のそれぞれがユニークなIDを有し、パッシブRFIDタグ130およびアクティブRFIDタグ128は電気的に接続されていない、すなわち電気的に絶縁されている。
【0027】
一実施形態では、ユーザにとっての煩雑さを低減するために、パッシブRFIDタグIDまたはアクティブRFIDタグIDのいずれかの、ただ1つのIDが用いられる。
【0028】
一実施形態では、アクティブRFIDタグ128のアクティブRFIDタグIDは、アクティブRIFDタグ128のアクティブRFIDメモリ部140に格納されており、パッシブRFIDタグ130のパッシブRFIDメモリ部146にも格納されている。アクティブRFIDタグIDのパッシブRFIDタグ130のパッシブRFIDメモリ部146への格納は製造中に行われる。パッシブRFIDタグリーダ106によりハイブリッドタグ104が読み取られたときに、アクティブRFIDタグ128およびパッシブRFIDタグ130のIDがパッシブRFIDリーダ106により取得される。そして、パッシブRFIDタグリーダ106は、パッシブRFIDリーダID、パッシブRFIDタグIDおよびアクティブRFIDタグIDをシステムネットワークを介してコントローラサーバ122に送信しデータベースサーバ124に格納される。アプリケーションサーバ126のソフトウエアはパッシブRFIDタグIDを無視してアクティブRFIDタグIDのみ利用する。ユーザからみれば、ハイブリッドタグ104はアクティブRFIDタグ128のIDであるただ1つのIDを表示する。加えて、パッシブRFIDリーダIDは少なくとも1つの位置IDと関連付けられる。
【0029】
一実施形態では、アクティブRFIDタグ128のアクティブRFIDメモリ部140は代わりにパッシブRFIDのIDを格納する。アクティブRFIDタグ128により送信されたデータパケットはアクティブRFIDタグIDおよびパッシブRFIDタグIDを含む。スマートノード110またはSRR108によりデータパケットが受信され次第、該データパケットはネットワークを介してコントローラサーバ122に送信されデータサーバ124に格納される。パッシブRFIDタグIDのみが使用され、このためユーザにとっては、パッシブRFIDタグIDのみが存在する。
【0030】
一実施形態では、アクティブRFIDタグ部128とともに、またはハイブリッドタグにおいて、通常時閉じたリードスイッチ134の使用方法が提供される。アクティブRFIDタグ部128とともに、またはハイブリッドタグにおいて、通常時閉じたリードスイッチ134の使用は利用可能な電力を保存するのに役立つ。ハイブリッドタグ104は磁界を有するガントリ(gantry)を通過するので、一例としてハイブリッドタグ104を使用することは、通常閉じたリードスイッチ134が開放されハイブリッドタグ104のアクティブRFID回路139が電源ユニット132から電気的に絶縁される。ハイブリッドタグ104がガントリを過ぎてしまい磁界外に位置すれば、通常時閉じたリードスイッチ134は通常時の閉じた状態に戻り電源ユニット132に電気的に接続される。電力が供給され次第、アクティブRFID部128のマイクロコントローラのパワーオンリセットビットがセットされる。これにより、アクティブRFIDタグ部128は所定時間内にガントリデータパケットを継続して送信しその後パワーオンリセットビットはクリアされる。
【0031】
上述したガントリデータパケットはハイブリッドタグIDを含み、ガントリデータパケットはハイブリッドタグ104がガントリを今通過したことを示すものとして定義される。スマートノード110およびSRR108がガントリデータパケットを受信すると、スマートノード110およびSRR108はデータパケットにそれらのIDを付加しコントローラサーバ122に送信する。次にシステムは、ハイブリッドタグIDと位置に関連付けられたSRRのIDまたはスマートノードIDとを関連付ける。位置が既知でありハイブリッドタグ104がガントリを通過した表示により、システムはその位置のガントリをハイブリッドタグ104が通過したことを示すことができる。
【0032】
一実施形態では、通常時閉じたリードスイッチ134が登録用に使用することもできる。ハイブリッドタグ104が磁界を有する保存ケース内に置かれていると、通常時閉じたリードスイッチ134は開放されておりアクティブRFID回路139は電源ユニット132から電気的に絶縁される。ハイブリッドタグ104が保存ケースから取り出されると、通常時閉じたリードスイッチ134は通常時の閉じた状態に戻りアクティブRFID回路139に電気的に接続される。電力が供給され次第、アクティブRFID部128のマイクロコンピュータのパワーオンリセットビットがセットされる。これにより、アクティブRFIDタグ部128は所定時間内にガントリデータパケットを継続して送信しその後パワーオンリセットビットはクリアされる。システムは、登録パケットを受け取り次第、上述したハイブリッドタグ104にスイッチが入ったことを表示する。
【0033】
一実施形態では、RFIDタグアセンブリ104はアクティブRFIDタグ部128のみを含む。アクティブRFIDタグ部128は、電源ユニット132、通常時閉じたリードスイッチ134、RF送信機136、アクティブRFIDプロセッサ138、アクティブRFIDメモリ部140、アンテナ142およびサーミスタ144を含む。上述したように、RF送信機136、アクティブRFIDプロセッサ138およびアクティブRFIDメモリ部140の組み合わせはアクティブRFID回路139と呼ばれる。通常時閉じたリードスイッチ134はアクティブRFID回路139に接続されており、通常時閉じたリードスイッチ134は、磁界環境に置かれるとアクティブRFID回路139が電源ユニット132から電気的に切断され、磁界環境外に置かれるとアクティブRFID回路139が電源ユニット132に電気的に接続されるように構成されている。
【0034】
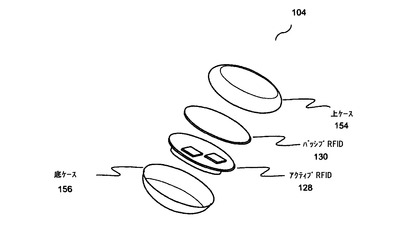
図3は、本発明の一実施形態による無線周波数識別タグアセンブリの分解図を示す。RFIDタグアセンブリ104は、上ケース154、パッシブRFIDタグ部130、アクティブRFIDタグ部128および底ケース156を含む。上ケース154および底ケース156は、例えばアクリロニトリルブタジエンスチレン(ABS)等の適正な部材で構成される。上ケース154および底ケース156はともに、パッシブRFIDタグ部130およびアクティブRFIDタグ部128を内蔵するために防水ケースを形成するようにしてもよい。パッシブRFIDタグ部130およびアクティブRFIDタグ部128は図2において上述したものである。
【0035】
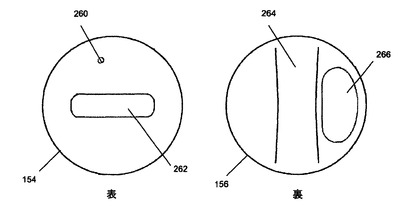
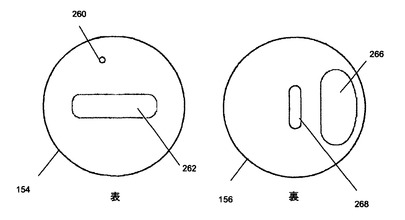
図4は、本発明の一実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。上すなわち正面ケース154は、LED窓260およびバーコードすなわちシリアルナンバーラベル用の窓262を含む。LED窓260はユーザにタグアセンブリがアクティブであることを示すものである。底すなわち背面ケース156は、時計のようにサブジェクトの手首に固定されるリスト(手首)ストラップを配置するためのスロット264および赤外(IR)窓266を含む。一実施形態では、RFIDタグアセンブリ104はIRトランシーバを有する。IR窓266はRFIDタグアセンブリ104がIR通信を許容するように構成される。
【0036】
図5は、本発明のさらなる実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。上すなわち正面ケース154は、LED窓260およびバーコードすなわちシリアルナンバーラベル用の窓262を含む。LED窓260はユーザにタグアセンブリがアクティブであることを示すものである。底すなわち背面ケース156は、サーミスタ用のメタルコンタクト268および赤外(IR)窓266を含む。一実施形態では、RFIDタグアセンブリ104はIRトランシーバを有する。IR窓266はRFIDタグアセンブリ104がIR通信を許容するように構成される。サーミスタはメタルコンタクト268と熱的に接触しており、メタルコンタクト268はサブジェクト(例えば、患者の皮膚)に熱的に接触している。サーミスタはメタルコンタクト268の温度を測定し、メタルコンタクト268は熱の良伝導体であるため、測定された温度は実質的に皮膚温度と同じである。
【0037】
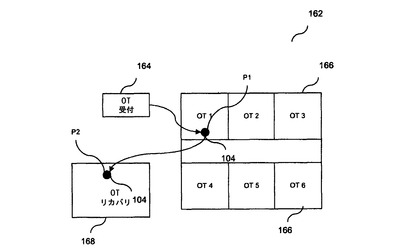
図6は、本発明の一実施形態による、手術室(OT)複合体内での無線周波数識別タグアセンブリの実施例を示す。OT複合体162は、OT受付164、複数のOT166およびOTリカバリ(回復室)168を含む。一実施形態では、OT複合体162のワークフローに組み込まれたハイブリッドタグ104のパッシブRFIDタグ部130は、患者のピンポイントの位置を提供することができる。まず患者がOT受付164に到着すると、個人的特殊性等の患者の詳細や予定の診療時間が確認される。患者が指定されたOT166内に、上記例ではOT1に運ばれると、患者のハイブリッドタグ104が第1のパッシブRFIDリーダP1でスキャンされる。RFIDリーダP1は、このハイブリッドタグIDを追跡するアクティブRFIDタグ部128を使用不能にするために、ハイブリッドタグID、RFIDリーダIDおよびコマンドを含むデータパケットを送信する。同時に、位置が、RFIDリーダP1に関連付けられた位置に更新される。
【0038】
ハイブリッドタグ104を追跡するアクティブRFIDタグ部128が使用不能となっている間、ハイブリッドタグ104の位置は最後に知られた位置に関連付けられ、その位置はハイブリッドタグ104を読み取るために用いられるパッシブRFIDリーダに関連付けられた位置である。
【0039】
手術の後、患者はOTリカバリ168に移される。患者のハイブリッドタグ104は第2のパッシブRFIDリーダP2で再度スキャンされる。ほぼこのとき、ハイブリッドタグ104を追跡するアクティブRFIDタグ部128を使用可能とするために、ハイブリッドタグID、RFIDリーダIDおよびコマンドが送信され、アクティブRFIDタグ部128による追跡が再度行われるようにスマートトラックアルゴリズムが使用される。無線周波数識別タグアセンブリの実施例は適正なビルや家屋敷内でも行われる。
【0040】
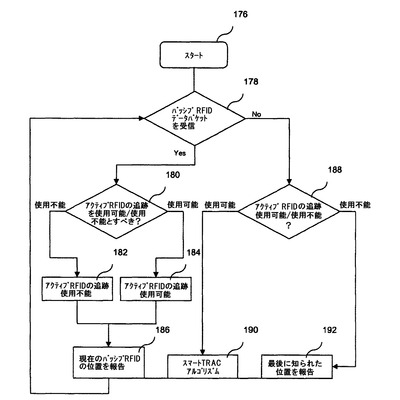
図7は、本発明の一実施形態による、図6に示す手術室複合体内での無線周波数識別タグアセンブリの実施例のフローチャートを示す。
【0041】
ステップ176で実行が開始される。ステップ176では、ハイブリッドタグ104が患者に発行され、患者の位置IDを追跡する方法が実行される。
【0042】
次のステップ178では、パッシブRFIDデータパケットを受信したかが判断される。パッシブRFIDリーダにより送信されたパッシブRFIDデータパケットには、ハイブリッドタグ104のパッシブID、アクティブIDおよび特定のハイブリッドタグ104を追跡するアクティブRFIDタグ部128を使用可能または使用不能とするかの情報をシステムに通知するためのコマンドを含む。ステップ178でパッシブRFIDデータパケットが受信されたと判断されると、処理はステップ180に進み、そこではアクティブRFIDタグ部128の追跡を使用可能または使用不能とするかが判断される。
【0043】
アクティブRFIDタグ部128の追跡を使用不能とすべきと判断されたときは、処理はステップ182に進み、そこではアクティブRFIDタグ部の追跡が使用不能とされる。アクティブRFIDタグ部128の追跡を使用可能とすべきと判断されたときは、処理はステップ184に進み、そこではアクティブRFIDタグ部の追跡が使用可能とされる。
【0044】
ステップ182、184に続き、処理はステップ186に進み、そこでは現在のパッシブRFIDタグ部130の位置が報告される。
【0045】
ステップ186に続き、処理はステップ178に戻り、そこではパッシブRFIDデータパケットを受信したかが再度判断される。ステップ178でパッシブRFIDデータパケットが受信されていないと判断されると、処理はステップ188に進み、そこではアクティブRFIDタグ部128の追跡が使用可能か使用不能かが判断される。
【0046】
アクティブRFIDタグ部128の追跡が使用可能と判断されると、処理はステップ190に進み、そこではスマートトラックアルゴリズムがアクティブ化される。アクティブタグ部128の追跡が使用不能と判断されると、処理はステップ192に進み、そこでは最後に知られた位置が報告される。
【0047】
ステップ190、192に続き、処理はステップ178に再度戻る。
【0048】
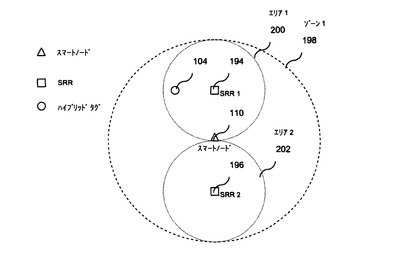
図8は、本発明の一実施形態による、粗い位置確認受信機および細かい位置確認受信機のそれぞれの呼び掛けゾーン(interrogation zones)を示す。粗い位置確認受信機すなわちスマートノード110は、比較的広い受信エリアすなわち位置確認ゾーン198を有し、各粗い位置確認受信機110はハイブリッドタグ104の粗い位置確認を提供するために使用される。細かい位置確認受信機すなわちSRR194、196は、スマートノード110と比較し、各々がより狭い受信エリアすなわち位置確認ゾーン200、202を有する。従って、各SRR194、196はハイブリッドタグ104の細かい位置確認を提供する。
【0049】
図8では、ハイブリッドタグ104はエリア1、200内に位置付けられている。スマートノード110の受信エリア(位置確認ゾーンとも呼ぶ)はSRR1、194、SRR2、196の各受信エリアと比較して大きいため、スマートノード110はハイブリッドタグ104の粗い位置確認を提供する。スマートノード110は、半径約10メートルのゾーン1、198の大きな受信エリアを有している。SRR194、196は、それぞれ半径約5メートルのエリア1、200およびエリア2、202の小さな受信エリアを有している。受信エリアが小さいので、SRR194、196はハイブリッドタグ104がSRR194、196の近くにある場合のみデータパケットを受信する。ハイブリッドタグ104からのデータパケットを受信し次第、SRR1、109は受信したデータパケットにそのIDを付加し修正したデータパケットを再送信する。再送信されたデータパケットはスマート110に宛てられる。スマートノード110は、再送信されたデータパケットを受け取り次第、それをコントローラサーバ122に送信する。次いでシステムはハイブリッドタグIDをエリア1、200に関連付けられたSRR1のIDと関連付ける。それにより、ハイブリッドタグ104の位置はエリア1、200内にあることが認識される。
【0050】
一実施形態では、スマートノード110は無線周波数(RF)受信機である。それはハイブリッドタグ104およびSRR194、196からのデータパケットを受信する役割を担う。受信されたデータはLANを介してコントローラサーバ122に伝達される。各スマートノード110は各自のユニークなIDを有する。
【0051】
一実施形態では、スマートノード110は、スマートセンス位置追跡システムが実行されるエリアに分散されている。システムはエリアのリストを持っており、各エリアには位置IDが与えられる。各スマートノード110には少なくとも1つの位置IDが割り当てられる。従って、スマートノード110の群は位置を表す。
【0052】
スマートノード110がハイブリッドタグ104からデータパケットを受信すると、スマートノード110はデータパケットにそのIDを付加しコントローラサーバ122に送信する。ハイブリッドタグIDとスマートノードIDとにより、システムはハイブリッドタグIDをスマートノードIDに割り当てられた位置IDに関連付けることができる。位置IDをハイブリッドタグIDに関連付けることにより、ハイブリッドタグ104の位置が認識される。
【0053】
SRR194、196は、ハイブリッドタグ104のより正確な位置を演算するためにスマートトラックアルゴリズム用の付加データを提供することによりスマートノード110を補完する。各SRR194、196はユニークなIDを有しており位置IDに関連付けられている。
【0054】
一実施形態では、各SRR194、196は、RF受信機、RF送信機およびマイクロコントローラで構成される。RF受信機はハイブリッドタグ104からのRFデータパケットを受信する役割を担い、マイクロコントローラはデータパケットにSRRのIDを付加しRF送信機を介してスマートノード110にデータパケットを再送信する。
【0055】
SRR受信機はスマートノード110に比べ小さな受信範囲すなわち受信エリアを有する。RF送信機はハイブリッドタグ104に比べより高い送信出力を有する。従って、SRR108は小さな受信範囲および高い送信範囲を有する。
【0056】
一実施形態では、各SRRの受信部の受信範囲は低い信号強度閾値と高い信号強度閾値とに変更することで調整可能である。低い信号強度閾値を下回る信号はSRRの受信範囲の外側にあるものとみなされる一方、高い信号強度閾値を上回る信号はSRRの受信範囲すなわち受信エリア内にあるものとみなされる。
【0057】
第1の実行例では、SRRは一般に信号強度表示を有する受信機を備えている。信号強度表示に基づいて、SRRは低い信号強度閾値および高い信号強度閾値に基づいてデータパケットを拒絶するか受け容れるかの選択が可能である。
【0058】
低い信号強度閾値および高い信号強度閾値は経験的方法により決定することができる。SRRは好ましい配置設定で配することができる。送信ハイブリッドタグはSRRから指定された距離離れて配置することができる。異なる距離での信号強度は各々決定される。例えば、SRRが基準位置に配置されハイブリッドタグはSRRから約2メートル離れて配置される。各データパケットの信号強度は約15分の間隔で記録される。約15分後、約2メートルでの平均信号強度が算出される。その後、距離を約4メートルに増加させ、各データパケットの信号強度が約15分の間隔で記録される。再度、約4メートルでの平均信号強度が算出される。このプロセスは例えば約10メートルの距離となるまで繰り返される。ハイブリッドタグの数が多ければ種々の距離での信号強度をより良好に推定可能である。
【0059】
ハイブリッドタグの信号強度は、ハイブリッドタグがSRRからどの程度離れているかを表すものである。SRR受信部の低い信号強度閾値および高い信号強度閾値は上述したように種々の値で設定可能である。SRRの配置がハイブリッドタグをピンポイントで特定する程の高精度が要求される場合には、高い信号強度閾値および低い信号強度閾値は高い値となり(例えば、2メートルの範囲内)、これによりSRRは近接した範囲内でハイブリッドタグを検出することができるようになる。SRRの数を最小とすることが求められ広い受信範囲で配置される場合には、その範囲は最小の低い信号強度閾値および高い信号強度閾値に設定すればよい。
【0060】
他の実行例では、受信部のSRR信号強度閾値はハードウエア構成で変更される。受信機の感度が低減されることによって低い信号強度閾値および高い信号強度閾値が増加される。
【0061】
一実施形態では、低い信号強度閾値および高い信号強度閾値を区別する必要はなく実質的に同じである。
【0062】
上述した実行例では、SRRのRF受信機は損失アンテナ(lossy antenna)で構成されていてもよい。損失アンテナは非共振値に対しパッシブインピーダンスが適合する部材を調整することで実行される。受信機のアンテナ設計も感度を下げるように変更することが可能である。例えば、アンテナサイズの変更、アンテナ長さの変更、アンテナ形状の変更を挙げることができる。信号レベルの閾値を増加させるため、RFアテニュエータ(減衰器)を受信機のアンテナに付加するようにしてもよい。損失アンテナ設計上でのRFアテニュエータ設計の利点は、その波形を容易に歪曲することなくRFアテニュエータが信号の増幅すなわちパワーを減少させることにある。
【0063】
図9は、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のソフトウエア構成を示す。スマートタグサーバアプリケーション204はコントローラサーバ122内に存在し、スマートノード110で受信されたデータパケットを収集しそのデータパケットをスマートセンスデータベース206に格納する役割を担う。スマートセンスデータベース206はデータベースサーバ124内に存在する。位置エンジン208はアプリケーションサーバ206内に存在し、スマートセンスデータベース206内に格納されたデータパケットを解釈、処理し演算した位置結果をスマートセンスデータベース206に返す役割を担う。位置エンジン208はスマートトラックアルゴリズムを用い位置結果を演算する。アプリケーションサーバ126内に存在するスマートセンスウエブサーバ210はユーザに位置結果を表示する。
【0064】
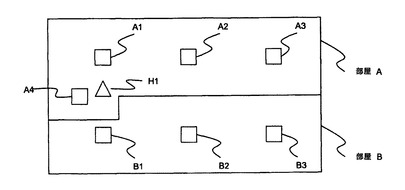
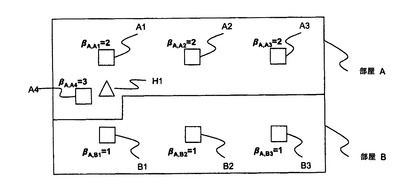
図10A〜図10Gは、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法の各シナリオを示す。図10Aは、スマートセンスシステムの簡略化した構成を示す。部屋Aには、3つのスマートノード、すなわち、A1、A2およびA3、並びに、SRR、すなわち、A4が取り付けられており、部屋Bには、3つのスマートノード、すなわち、B1、B2およびB3が取り付けられている。図10Aに示すように、ハイブリッドタグ(H1)を装着したサブジェクトすなわち人は部屋Aに位置している。
【0065】
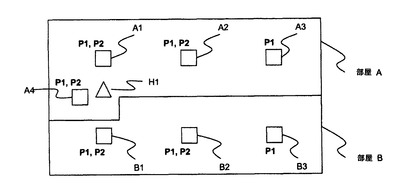
図10Bは、各スマートノードおよびSRRにより受信されたデータパケットを示す。まず、H1は強い信号データパケット(P1)を送信し、データパケットはA1、A2、A3、A4、B1、B2およびB3で受信される。次に、H1は弱い信号データパケット(P2)を送信し、そのデータパケットはA1、A2、A4、B1およびB2により受信される。A1、A2、A4、B1、B2は強い信号データパケットP1および弱い信号データパケットP2を受信する。A3およびB3は強い信号データパケットP1のみ受信する。
【0066】
データパケットの各タイプは異なった重み付けを有していてもよい。例えば、強い信号データは低い重み付けを有しており、弱い信号データは高い重み付けを有していてもよい。P1は強い信号データパケットでλ=1の重みを有しており、P2は弱い信号データパケットでλ=2の重みを有するものとすることができる。
【0067】
各スマートノードまたはSRRについて、これらが受信したデータパケットに基づいてスコアNが演算される。
【数1】
【0068】
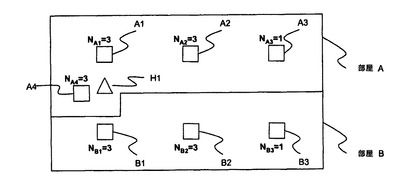
図10Cは、各スマートノードおよびSRRのスコアを示したものである。A1はP1およびP2の両者を受信したため、A1のスコアNは3である。A2、A4、B1およびB2は、これらがA1と同じくP1およびP2を受信したため、同じスコアとなる。
【数2】
【0069】
A3およびB3はP1のみ受信しており、A3およびB3各々のスコアNは1である。
【数3】
【0070】
各スマートノードおよびSRRは各位置について係数βを有する。βは、追跡されたサブジェクトの予定位置や、スマートノードおよびSRRが所定位置で追跡されたサブジェクトから受信するデータパケットのプロファイルを考慮して決定される。
【0071】
一実施形態では、係数βは人や物の位置履歴に基づいて予定の動きも考慮して決定される。予定の動きには、動きの方向、動きのスピードおよび人や物が存在するエリアのレイアウト等のファクタを考慮してもよい。これらのファクタの1つ以上を用いることで、人や物が次にどこに位置するかを予測することができ、このため予定された位置でスマートノードおよびSRRにより大きな重みを割り当てることができる。
【0072】
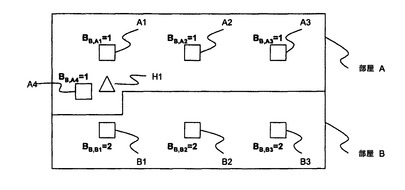
図10Dは、部屋Aにおける全てのスマートノードおよびSRRの係数βを示すものである。それぞれ、A1、A2およびA3の係数βは2、A4の係数βは3、B1、B2およびB3の係数βは1である。
【0073】
図10Eは、部屋Bにおける全てのスマートノードおよびSRRの係数βを示すものである。それぞれ、A1、A2、A3およびA4の係数βは1、B1、B2およびB3の係数βは2である。
【0074】
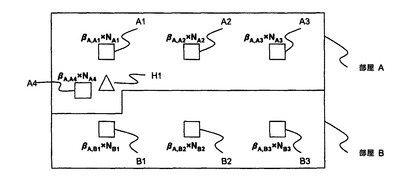
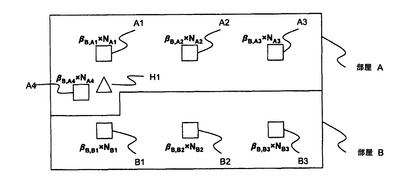
全てのスマートノードおよびSRRの各Nおよびβが演算された後、各位置でのスコアLが演算される。各位置でのLはNとβとの積を合算することで求めることができる。
【数4】
【0075】
図10Fは、部屋AにおけるスコアLの演算を示したものである。
【数5】
【0076】
図10Gは、部屋BにおけるスコアLの演算を示したものである。
【数6】
【0077】
Lについて最も高いスコアを有する位置がハイブリッドタグの位置である。上記の例では、部屋Aが30の高いスコアを有しているため、ハイブリッドタグは部屋Aに存在する。
【0078】
仮に、2つ以上の位置で最も高いスコアが同じ場合には、そのすべての位置が可能性のある位置と考えられ、ハイブリッドタグの位置デーブルにおいて前の位置を見直すことで決定される。前の位置が可能性のある位置のリストに存在すれば、現在の位置はハイブリッドタグのテーブルにおける前の位置であると認識される。前の位置が可能性のある位置のリストにない場合には、ハイブリッドタグのテーブルにおいて可能性のある位置のリストにおける最初の位置が更新される。
【0079】
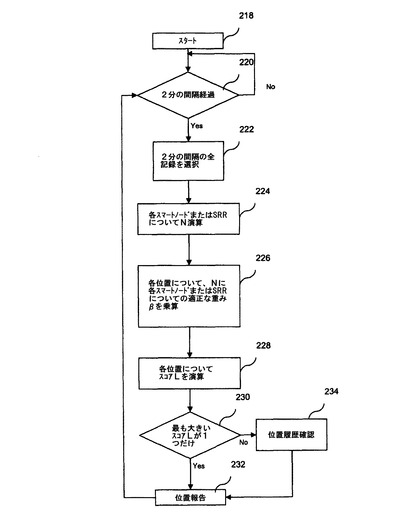
図11は、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のフローチャートを示す。位置IDを追跡する方法は「スマートトラック」(SmartTRAC)アルゴリズムと呼ばれる。位置IDを追跡する方法はステップ218で開始される。
【0080】
次にステップ220において、予め設定された時間間隔が経過したか否かが判断される。本形態では、時間間隔は2分に設定されているがこれに限るものではない。2分の時間間隔が経過したと判断されると、処理はステップ222に進み、そこでは2分の時間間隔内での全ての記録が選択される。一方、2分の時間間隔が経過していないと判断されたときには、処理は引き続き2分の時間間隔が経過したかを確認する。
【0081】
ステップ222の後、処理はステップ224に進み、そこでは各スマートノードまたはSRRについてスコアNが演算される。これに続きステップ226では、各位置について、Nと各スマートノードまたはSRRについての適正な重みβとが乗算される。
【0082】
次にステップ228では、各位置についてスマートノードおよび/またはSRRの総数に基づいてスコアLが演算される。
【0083】
次いでステップ230では、最も高いスコアLが1つだけか否かが判断される。特定の位置における最も高いスコアLが1つだけの場合には、処理はステップ232に進み、そこでは位置が報告される。しかしながら、最も高いスコアLが1つだけではないと判断されると、処理はステップ234に進み、そこではハイブリッドタグの位置履歴が確認される。
【0084】
そして、処理はステップ232に進み、そこでは位置が報告される。
【0085】
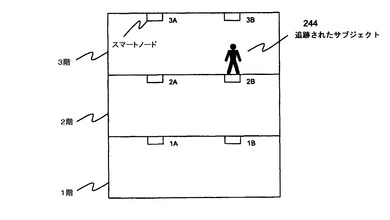
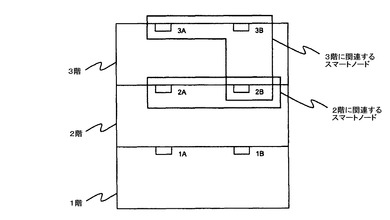
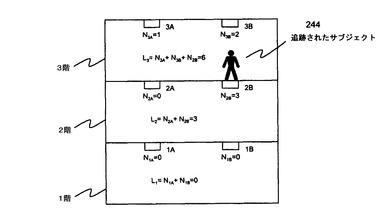
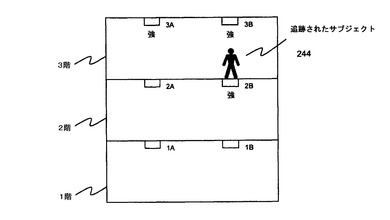
図12A〜図12Eは、本発明の一実施形態による、各位置IDと予め設定されたグループの受信機との関連付けを含む、サブジェクトの位置IDを追跡する方法を示す。図12Aは、各階に2つのスマートノードが取り付けられた3階建てのビルの例を示すものである。スマートノード3Aおよび3Bは3階に取り付けられており、スマートノード2Aおよび2Bは2階に取り付けられており、スマートノード1Aおよび1Bは1階に取り付けられている。追跡されたサブジェクト244は3階のスマートノード3Bの近くに位置している。
【0086】
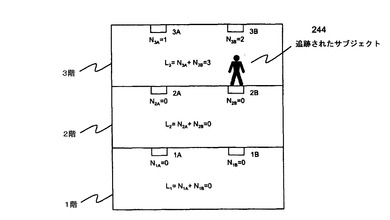
図12Bでは、各スマートノードがその階内でのみデータパケットを受信すると想定している。従って、アルゴリズムはどのスマートノードがデータパケットを受信しスマートノードに関連する位置を認識することを含む。図12Bでは、3階でスマートノードN3AおよびN3Bが追跡されたサブジェクト(被追跡者)244からデータパケットを受信する。N3Aは1でありN3Bは2である。3階のスコアL3はN3AとN3Bとの合計であり、それは3である。2階では、N2AおよびN2Bはそれぞれ0である。従って、2階のスコアL2はN2AとN2Bとの合計であり、それは0である。同様に1階では、N1AおよびN1Bはそれぞれ0である。従って、1階のスコアL1はN1AとN1Bとの合計であり、それも0である。これら3つの階におけるスコアLを比較することで、L3は3の最も高いスコアを有する。従って、追跡されたサブジェクト244は3階にいると認識できる。
【0087】
図12Bは理想的な状態の例を示したものである。しかしながら、実際に実行する場合には、データパケットは他の階でも受信される。このことはスマートノードが高い天井に取り付けられた場合、すなわち、ハイブリッドタグと下の階のスマートノードとの距離がハイブリッドタグと同じ階のスマートノードとの距離より短い場合に発生する。しばしば、下の階のスマートノードがより多くデータパケットを受信する場合がある。
【0088】
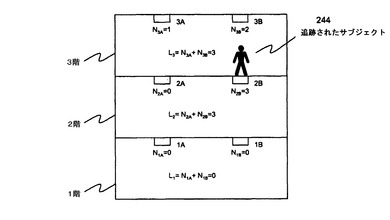
図12Cは、スマートノード3Aおよび3Bがそれぞれ1つおよび2つのデータパケットを受信する同じ構成を考慮した例であるが、この例ではスマートノード2Bが3つのデータパケットを受信する。3階のL3は3であり、2階のL2は3であり、1階のL1は0である。これに関し、3階のトータルスコアLのL3と2階の全スコアLのL2とが同じなため、各階で受信されたデータパケットの総数を合算することは無益である。上述したアルゴリズムを採用すれば、2つの階でのトータルスコアLが同じなため、サブジェクトは3階または2階にいると決定される。
【0089】
従って、図12Dでは、スマートノードの物理的グループ化に代えて論理的グループ化が導入されている。現場調査から、前に示したようにサブジェクトが上記の位置にいるときには、スマートノード2Bはデータパケットを受信し続ける。従って、2階に関連するスマートノードは2Aおよび2Bであるが、3階に関連するスマートノードは3A、3Bおよび2Bということになる。
【0090】
このような関連を構築することで、図12Eでは、各位置について各スマートノードで受信されたデータパケットの数を合算するアルゴリズムを含んでいる。最も高いスコアLの位置は追跡されたサブジェクト244の位置である。図12Eから、3階は6のスコアL3を有し、2階は3のスコアL2を有し、1階は0のスコアL1を有している。従って、サブジェクトは3階に位置している。
【0091】
図13A〜図13Bは、本発明の一実施形態による、受信機の受信機タイプに基づく重み付けを含む、サブジェクトの位置IDを追跡する方法を示す。上述したアルゴリズムは、各位置における各スマートノードに対する重み付けを導入することにより、より一般化することができる。スマートノードに重み付けを導入することの利点を、図13Aと図13Bとを対照して説明する。
【0092】
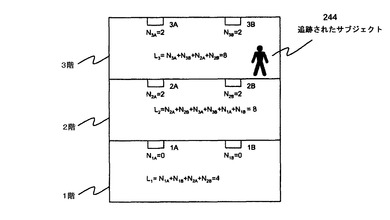
図13Aおよび図13Bは、それぞれ各階に取り付けられた2つのスマートノードを有する3階建てのビルの例を示すものである。スマートノード3Aおよび3Bは3階に取り付けられており、スマートノード2Aおよび2Bは2階に取り付けられており、スマートノード1Aおよび1Bは1階に取り付けられている。追跡されたサブジェクト244は3階のスマートノード3Bの近くに位置している。
【0093】
図13Aにおいて、3階におけるN3AおよびN3Bはそれぞれ2である。2階におけるN2AおよびN2Bもそれぞれ2である。1階におけるN1AおよびN1Bはそれぞれ0である。3階におけるスコアL3はN3A、N3B、N2AおよびN2Bの合計であり、それは8である。2階におけるスコアL2はN3A、N3B、N2A、N2B、N1AおよびN1Bの合計であり、それも8である。1階におけるスコアL1はN2A、N2B、N1AおよびN1Bの合計であり、それは4である。3つの階におけるスコアLを比較することで、L3とL2とは8の同じスコアを有する。従って、図13Aではサブジェクトを認識することは難しい。
【0094】
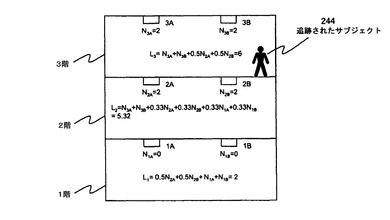
図13Bでは、受信機の受信機タイプに基づいて重み付けが割り当てられている。3階におけるN3AおよびN3Bはそれぞれ2である。2階におけるN2AおよびN2Bもそれぞれ2である。1階におけるN1AおよびN1Bはそれぞれ0である。3階におけるスコアL3はN3A、N3B、0.5N2Aおよび0.5N2Bの合計であり、それは6である。2階におけるスコアL2はN3A、N3B、0.33N2A、0.33N2B、0.33N1Aおよび0.33N1Bの合計であり、それは5.32である。1階におけるスコアL1は0.5N2A、0.5N2B、N1AおよびN1Bの合計であり、それは2である。3つの階におけるスコアLを比較することで、L3は6の最も高いスコアを有する。従って、図13Bにおいてサブジェクトを認識することが可能となる。
【0095】
図14A〜図14Bは、本発明の一実施形態による、細かい位置確認受信機が使用され得る例を示す。細かい位置確認受信機すなわちSRRを使用することは、サブジェクトの位置をより高い精度で提供することである。これはSRRが非常に狭い受信範囲を有するという事実によるものであり、従って他の階から送信されたデータパケットはSRRにより受信されない。
【0096】
図14Aは、3階に2つのスマートノード3Aおよび3Bと1つのSRR3Cが取り付けられ、2階に2つのスマートノード2Aおよび2Bが取り付けられ、1階に2つのスマートノード1Aおよび1Bが取り付けられていることを示す。
【0097】
3階における各スマートノードまたはSRRが受信したデータパケットの数に基づいて、スコアNは、それぞれN3A=1、N3B=2、N3C=3である。2階における各スマートノードが受信したデータパケットの数に基づいて、スコアNは、それぞれN2A=0、N2B=3である。1階における各スマートノードが受信したデータパケットの数に基づいて、スコアNは、それぞれN1A=0、N1B=0である。
【0098】
SRRは非常に狭い受信範囲を有するため、他の階から送信されたデータパケットはSRRによって受信されない。従って、スマートノードに比べ高い重み付けがSRRに割り当てられる。スマートノード3Aおよび3Bの1の重み付けに対し、SRR3Cは2のより高い重み付けを有している。従って、3階におけるスコアL3は9である。スマートノード2A、2Bはそれぞれ1の重み付けを有する。従って、2階におけるスコアL2は3である。スマートノード1Aおよび1Bはそれぞれ1の重み付けを有する。従って、1階におけるスコアL1は0である。L3は最も高いスコアを有しており、サブジェクト244は3階にいる。
【0099】
SRRの他の使用はエリアをさらに分割することにある。図14Bに示すように、一実施形態では、3階はパーティションで2つの部屋、すなわち、部屋Aおよび部屋Bに分割することができる。第1のSRR3Aは部屋Aに配置でき、第2のSRR3Bは部屋Bに配置できる。スマートノード3Cは部屋Aと部屋Bとの間に配置できる。SRR3Aおよび3Bは狭い受信範囲を有するため、SRR3Aおよび3Bはそれらの各部屋のみカバーする。スマートノード3CはSRR3Aおよび3Bのデータパケットをコントローラサーバにアップロードすることが求められる。サブジェクト244は部屋Bに位置しているため、SRR3Bだけがサブジェクトのハイブリッドタグからのデータパケットを受信可能である。
【0100】
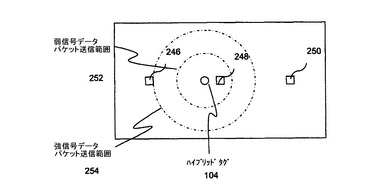
図15Aおよび図15Bは、本発明の一実施形態による、位置確認上で弱および強信号データパケット(weak and strong signal data packets)を使用することの効果を示す。弱および強信号データパケットは、受信範囲を犠牲にすることなく、スマートセンスシステムが良好な位置確認を達成することを可能にする。図15Aおよび図15Bは弱および強信号データパケットがどのように互いに補完するかを示すものである。弱信号データパケットのみが用いられるとすると、信号がどのスマートノードにも到達しない状況が起こり得る。ブラインドスポットをなくすため、受信範囲を確保するためのより多くのスマートノードが必要となる。一方、強信号データパケットは階を越えての送信をもたらす。
【0101】
図15Aおよび図15Bは、互いに離れて位置付けられた複数のスマートノード246、248および250を示す。図15Aは、スマートノード246およびスマートノード248間で、スマートノード246およびスマートノード248からそれぞれ等距離に位置付けられたハイブリッドタグ104を示す。ハイブリッドタグ104は、小さな円252の参照符号が付された弱信号データパケット送信範囲および大きな円254の参照符号が付された強信号データパケット送信範囲を有する。図15Aは、弱信号データパケットのみが送信された場合、信号がスマートノード246およびスマートノード248のいずれにも到達しないことを示している。そして強信号データパケットが送信されると、スマートノード246およびスマートノード248は信号を受信し、それによって階を跨るまたはエリアを跨る送信となる。
【0102】
図15Bは、スマートノード246およびスマートノード248の間で、スマートノード248の近くに位置付けられたハイブリッドタグを示す。図15Aと同様に、ハイブリッドタグ104は、小さな円252の参照符号が付された弱信号データパケット送信範囲および大きな円254の参照符号が付された強信号データパケット送信範囲を有する。図15Aとは異なり、図15Bは、弱信号データパケットのみが送信された場合、信号がスマートノード248に到達する。そして強信号データパケットが送信されると、スマートノード248はこの信号も受信する。これは、ハイブリッドタグ104がスマートノード248の近くに位置付けられているため、図15Aの状況とは異なっている。従って、信号がどのスマートノードにも到達しないという状況や、階を跨るまたはエリアを跨る送信を避けるために、よい受信範囲を提供するため多くのスマートノードが採用される。
【0103】
図16A〜図16Cは、本発明の一実施形態による、データタイプに基づく重み付けの割り当てを含む、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【0104】
図16Aは、各階に2つのスマートノードが取り付けられた3階建てのビルを示す。スマートノード3Aおよび3Bは3階に取り付けられ、スマートノード2Aおよび2Bは2階に取り付けられ、スマートノード1Aおよび1Bは1階に取り付けられている。ハイブリッドタグを装着した追跡されたサブジェクト244は3階でスマートノード3Bの近くに位置付けられている。
【0105】
追跡されたサブジェクト244からのハイブリッドタグはまず強信号データパケットを送信する。図16Aに示すように、スマートノード3A、3Bおよび2Bは強信号データパケットを受信する。
【0106】
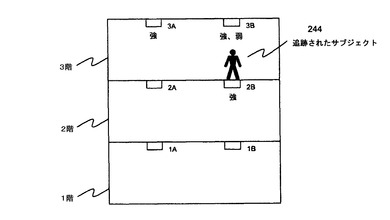
強信号データパケットを送信した後、ハイブリッドタグは弱信号データパケットを送信する。図16Bに示すように、弱信号データパケットはスマートノード3Bのみに受信される。
【0107】
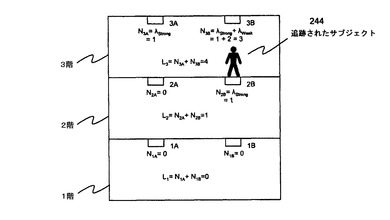
弱信号データパケットを受信するスマートノードの呼び掛けゾーンにハイブリッドタグがある可能性は、強信号データパケットを受信する他のスマートゾーンの他の呼び掛けゾーンにハイブリッドタグがある可能性よりも高いため、高い重み付けが弱信号データパケットに与えられ、低い重み付けが強信号データパケットに与えられる。
【0108】
図16Cに示すように、λstongは1であり、λweakは2である。各スマートノードのスコアNは受信されたデータパケットの全ての重みを合計することで演算される。3階では、スマートノード3AについてのN3Aはλstongであり、それは1である。スマートノード3BについてのN3Bはλstongとλweakの合計であり、それは3である。2階では、スマートノード2AについてのN2Aは0であり、スマートノード2BについてのN2Bはλstongであり、それは1である。1階では、スマートノード1AについてのN1Aは0であり、スマートノード1BについてのN1Bは0である。
【0109】
次いで、各階のスコアNを合計することで各階のスコアLが演算され、Lについての最も高いスコアを有する階が追跡されたサブジェクト244の位置とされる。図16Cでは、3階のスコアL3はN3AとN3Bの合計であり、それは4である。2階のスコアL2はN2AとN2Bの合計であり、それは1である。1階のスコアL1はN1AとN1Bの合計であり、それは0である。従って、L3が4の最も高いスコアを有するため、追跡されたサブジェクト244は3階にいる。
【0110】
以下では、本発明のさらなる実施形態が説明される。
【0111】
本発明の一実施形態によれば、位置スコアがユニークかを決定することを含む位置スコアに基づいてサブジェクトの位置を決定する。
【0112】
本発明の一実施形態によれば、ユニークな位置スコアがない場合に無線周波数識別タグの位置履歴を確認する方法をさらに含む。
【0113】
本発明の一実施形態によれば、複数の受信機のうち第1の受信機のセットで無線周波数識別タグから第2の信号を受信する方法をさらに含む。
【0114】
本発明の一実施形態によれば、複数の受信機のうち第2の受信機のセットで無線周波数識別タグから第1の信号を受信する方法をさらに含む。
【0115】
本発明の一実施形態によれば、第1の受信機のセットの各々が第1の呼び掛けゾーンを含み、第2の受信機のセットの各々が第2の呼び掛けゾーンを含む。
【0116】
本発明の一実施形態によれば、第1の呼び掛けゾーンは第2の呼び掛けゾーンより小さい。
【0117】
本発明の一実施形態によれば、予め定められた時間間隔内で、第2の受信機のセットで受信したコントローラサーバ内の第1の信号および/または第2の信号を収集する方法をさらに含む。
【0118】
本発明の一実施形態によれば、データベースサーバに受信した信号を格納する方法をさらに含む。
【0119】
本発明の一実施形態によれば、格納した信号をアプリケーションサーバで処理し該処理した信号をデータベースサーバに保存する方法をさらに含む。
【0120】
本発明の一実施形態によれば、各位置を複数の受信機のうち予め定められたセットの受信機に関連付ける方法をさらに含む。
【0121】
本発明の一実施形態によれば、位置スコアを演算することには、さらにサブジェクトの予定された動き(projected movement)に基づいて位置スコアを演算することを含む。
【0122】
本発明の一実施形態によれば、サブジェクトの予定された動きは、サブジェクトの位置履歴、動きの方向、動きのスピードおよび位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する。
【0123】
本発明の一実施形態によれば、第1の信号は第1の予め設定された閾値を越える信号を含む。
【0124】
本発明の一実施形態によれば、第2の信号は第2の予め設定された閾値未満の信号を含む。
【0125】
本発明の一実施形態によれば、第2の予め設定された閾値は第1の予め設定された閾値より低い。
【0126】
本発明の一実施形態によれば、第2の予め設定された閾値は少なくとも実質的に第1の予め設定された閾値と同じである。
【0127】
本発明の一実施形態によれば、決定ユニットは、さらに位置スコアがユニークかを決定するように構成されている。
【0128】
本発明の一実施形態によれば、ユニークな位置スコアがない場合に無線周波数識別タグの位置履歴を確認する確認ユニットをさらに備えたシステムを含む。
【0129】
本発明の一実施形態によれば、複数の受信機のうちの第1のセットの受信機が無線周波数識別タグから第2の信号をさらに受信する。
【0130】
本発明の一実施形態によれば、複数の受信機のうちの第2のセットの受信機が無線周波数識別タグから第1の信号をさらに受信する。
【0131】
本発明の一実施形態によれば、第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、2のセットの受信機の各々が第2の呼び掛けゾーンを含む。
【0132】
本発明の一実施形態によれば、第1の呼び掛けゾーンが第2の呼び掛けゾーンより小さい。
【0133】
本発明の一実施形態によれば、システムは、第2のセットの受信機に接続されたコントローラサーバであって、予め定められた時間間隔内に第2のセットの受信機で受信した第1の信号および/または第2の信号を収集するコントローラサーバをさらに備える。
【0134】
本発明の一実施形態によれば、システムは、コントローラサーバに接続されたデータベースサーバであって、受信した信号を格納するデータベースサーバをさらに備える。
【0135】
本発明の一実施形態によれば、システムは、データベースサーバに接続されたアプリケーションサーバであって、格納した信号を処理するアプリケーションサーバをさらに備える。
【0136】
本発明の一実施形態によれば、システムは、各位置を複数の受信機のうちの予め定められたセットの受信機に関連付ける関連付けユニットをさらに備える。
【0137】
本発明の一実施形態によれば、演算ユニットは、さらにサブジェクトの予定された動きに基づいて位置スコアを演算するように構成されている。
【0138】
本発明の一実施形態によれば、サブジェクトの予定された動きは、サブジェクトの位置履歴、動きの方向、動きのスピードおよび位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する。
【0139】
本発明の一実施形態によれば、第1の信号は第1の予め設定された閾値を越える信号を含む。
【0140】
本発明の一実施形態によれば、第2の信号は第2の予め設定された閾値未満の信号を含む。
【0141】
本発明の一実施形態によれば、第2の予め設定された閾値は第1の予め設定された閾値より低い。
【0142】
本発明の一実施形態によれば、第2の予め設定された閾値は少なくとも実質的に第1の予め設定された閾値と同じである。
【0143】
本発明の一実施形態によれば、第1のセットの受信機は、無線周波数手段を介して第2のセットの受信機と通信する。
【0144】
本発明の一実施形態によれば、第2のセットの受信機は、通信ネットワークを介してコントローラサーバと通信する。
【0145】
本発明の一実施形態によれば、第1のタグが第1のタグ記憶部をさらに備える。
【0146】
本発明の一実施形態によれば、第1のタグIDが第1のタグ記憶部に格納される。
【0147】
本発明の一実施形態によれば、第1のタグおよび第2のタグが互いに電気的に絶縁される。
【0148】
本発明の一実施形態によれば、第2のタグの第2のタグ記憶部が不揮発性メモリである。
【0149】
本発明の一実施形態によれば、第1のタグの第1のタグ記憶部が不揮発性メモリである。
【0150】
本発明の一実施形態によれば、第1のタグがアクティブ無線周波数識別タグであり、第2のタグがパッシブ無線周波数識別タグである。
【0151】
本発明の一実施形態によれば、第1のタグがパッシブ無線周波数識別タグであり、第2のタグがアクティブ無線周波数識別タグである。
【0152】
本発明の一実施形態によれば、アクティブ無線周波数識別タグがサーミスタをさらに備える。
【0153】
本発明の一実施形態によれば、アクティブ無線周波数識別タグは、無線周波数識別回路と、無線周波数識別回路に接続され通常時閉じたスイッチと、を備え、通常時閉じたスイッチは、磁界環境下において無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において無線周波数識別回路が電源と電気的に接続されるように構成される。
【0154】
本発明を特定の実施形態を参照して具体的に説明してきたが、以下の請求の範囲で定義される発明の趣旨および範囲を越えることなく、当業者によって形態の種々の変更がなされ詳細はそれにより決定されることが理解される。このように発明の範囲は以下の請求の範囲に示され、請求の範囲と同等の意味および範囲内に入るすべての変形が包含される。
【技術分野】
【0001】
本発明は、一般にサブジェクトの位置アイデンティティを決定する方法およびシステム、並びに無線周波数識別タグアセンブリに関する。
【背景技術】
【0002】
位置追跡システムは、例えば、病院や兵站ハブ等のエリア内の人や資産の位置を追跡するために使用される。位置追跡システムを実行するために用いられる現在の技術は、グローバル ポジショニング システム(GPS)等の信号タイミング分析の使用やビーコン信号を検出する受信機のネットワークを有するものを含む。
【0003】
GPSは、ビルの内部等のインドア環境におけるよりむしろオープンエリアにおける位置データを提供するために一般に用いられる。加えて、GPSの実行に要求されるハードウエアは比較的高コストのため実行費用の増加を招く場合がある。
【0004】
これに対し、インドア追跡環境では無線周波数(RF)受信機のネットワークによってカバーすることができる。人(員)や資産にビーコン信号を送信するモバイルRF送信機が装着される。このため、到着時間(Time of Arrival、TOA)や受信信号強度インディケータ(Received Signal Strength Indicator、RSSI)に基づいて三点測量や三角測量が追跡された人や資産の位置を得るために使用される。そのような方法は演算が多くなるため望ましくはない。
【0005】
RF受信機および送信機に代えて赤外受信機および送信機を使用することができる。赤外信号は壁を貫通できないため、赤外信号は部屋ベースでの位置確認には大変好ましい。しかしながら、赤外送信機は容易に不鮮明となるためビーコン信号の喪失を招く。
【発明の概要】
【発明が解決しようとする課題および課題を解決するための手段】
【0006】
従って、人や資産の追跡を維持するために必要なマンパワー、時間および資源を低減可能な改善された位置追跡システムおよび方法が未だに必要である。
【0007】
本発明の一態様により、サブジェクトの位置を決定する方法が提供される。その方法は、複数の受信機のうち第1のセットの受信機で前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、前記無線周波数識別タグには無線周波数識別タグIDが割り当てられており、複数の受信機のうち第2のセットの受信機で前記無線周波数識別タグから第2の信号を受信し、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なっており、前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算し、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれており、前記位置スコアに基づいて前記サブジェクトの位置を決定する、ことを含む。
【0008】
本発明の一態様により、サブジェクトの位置を決定するシステムが提供される。そのシステムは、前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信する複数の受信機のうちの第1のセットの受信機であって、前記無線周波数識別タグに無線周波数識別タグIDが割り当てられた第1のセットの受信機と、前記無線周波数識別タグから第2の信号を受信する複数の受信機のうちの第2のセットの受信機であって、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なった第2のセットの受信機と、前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算する演算ユニットであって、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれた演算ユニットと、前記位置スコアに基づいて前記サブジェクトの位置を決定する決定ユニットと、を含む。
【0009】
本発明の一態様により、無線周波数識別タグアセンブリが提供される。その無線周波数識別タグアセンブリは、第1のタグであって、第1のタグIDを有する第1のタグと、第2のタグであって、第2のタグIDおよび第2のタグ記憶部を有する第2のタグと、を含み、第1のタグIDおよび第2のタグIDが前記第2のタグの前記第2のタグ記憶部に格納されている。
【0010】
本発明の一態様により、無線周波数識別タグアセンブリが提供される。その無線周波数識別タグアセンブリは、無線周波数識別回路と、前記無線周波数識別回路に接続された通常時閉じたスイッチであって、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された通常時閉じたスイッチと、を含む。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態による、サブジェクトの位置IDを追跡するシステムのブロック図を示す。
【図2】本発明の一実施形態による無線周波数識別タグアセンブリのブロック図を示す。
【図3】本発明の一実施形態による無線周波数識別タグアセンブリの分解図を示す。
【図4】本発明の一実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。
【図5】本発明のさらなる実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。
【図6】本発明の一実施形態による、手術室(OT)複合体内での無線周波数識別タグアセンブリの実施例を示す。
【図7】本発明の一実施形態による、図6に示す手術室複合体内での無線周波数識別タグアセンブリの実施例のフローチャートを示す。
【図8】本発明の一実施形態による、粗い位置確認受信機および細かい位置確認受信機のそれぞれの呼び掛けゾーンを示す。
【図9】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のソフトウエア構成を示す。
【図10A−10G】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【図11】本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のフローチャートを示す。
【図12A−12E】本発明の一実施形態による、各位置IDと予め設定されたグループの受信機との関連付けを含む、サブジェクトの位置IDを追跡する方法を示す。
【図13A−13B】本発明の一実施形態による、受信機の受信機タイプに基づく重み付けを含む、サブジェクトの位置IDを追跡する方法を示す。
【図14A−14B】本発明の一実施形態による、細かい位置確認受信機が使用され得る例を示す。
【図15A−15B】本発明の一実施形態による、位置確認上で弱および強信号データパケットを使用することの効果を示す。
【図16A−16C】本発明の一実施形態による、データタイプに基づく重み付けの割り当てを含む、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【発明を実施するための形態】
【0012】
図面では、異なる視点でも参照符号は原則的に同じ部材を表している。図面は、発明の原理を描写することに重きを置き寸法にとらわれず強調した箇所もある。以下の説明では、発明の種々の実施形態が図面を参照することにより行われる。図1は、本発明の一実施形態による、サブジェクトの位置IDを追跡するシステムのブロック図を示す。システム102は、第1の位置112に位置付けられた2つの無線周波数識別(RFID)タグアセンブリ104とRFIDタグリーダ(読取機)106を含む。システム102は、さらに第2の位置114に位置付けられた複数のRFIDタグアセンブリ104、2つの細かい位置確認受信機(fine localization receivers)108および2つの粗い位置確認受信機(coarse localization receivers)を含んでいる。また、システム102は、コントローラサーバ122、データベースサーバ124およびアプリケーションサーバ126を含んでいる。さらに、システム102は、さらなる位置、第3の位置116、第4の位置118および第5の位置120も含んでいる。
【0013】
RFIDタグリーダ106は、第1の位置112においてマニュアル位置確認ゾーン(manual localization zone)113を提供する。マニュアル位置確認ゾーン113は、十分なカバレッジ(受信範囲)を提供するため第1の位置112全域に亘っており、このゾーンがRFIDタグアセンブリ104のマニュアル読み取りによるためそのように呼ばれる。細かい位置確認受信機108の各々は第2の位置114内において細かい位置確認ゾーン115を提供し、粗い位置確認受信機110の各々は第2の位置114において粗い位置確認ゾーン117を提供する。粗い位置確認ゾーン117は、十分なカバレッジを提供するため第2の位置114の全域に亘っていてもよい。システム102は、「スマートセンス位置追跡システム(SmartSense Location Tracking System)」と呼ばれる。
【0014】
RFIDタグアセンブリ104の各々は「ハイブリッドタグ」と呼ばれる。各ハイブリッドタグ104はパッシブRFIDタグおよび/またはアクティブRFIDタグを含んでいてもよい。各ハイブリッドタグ104は、例えば、人や物等のサブジェクトに装着される。各ハイブリッドタグ104は(システムや世界的に)ユニークなアイデンティティ(ID)を含み、このユニークなIDがタグ104が装着された人や物に関連付けられる。各ハイブリッドタグ104は、無線周波数(RF)手段を介して定期的にそのIDを送信する。
【0015】
「スマートノード(SmartNODE)」と呼ばれる粗い位置確認受信機110の各々は、比較的広い受信エリアすなわち位置確認ゾーンを有しており、各粗い位置確認受信機110はハイブリッドタグ104の粗い位置確認を提供するために用いられる。スマートノード110がハイブリッドタグ104のIDを受信すると、ハイブリッドタグ104は必ずスマートノード110の受信範囲内にあり、ハイブリッドタグ104が予め定められた粗い位置確認ゾーン内にあることを認識することができる。
【0016】
ハイブリッドタグ104のより特定した位置を提供するために、それぞれ「ショートレンジ受信機(Short Range receiver、SRR)と呼ばれる、少なくとも1つの細かい位置確認受信機108を用いることができる。SRR108はスマートノード110と同じ原理で作動する。各SRR108は各スマートノード110と比べてより狭い受信エリアを有しており、それ故、SRR108はハイブリッドタグ104のより細かい位置確認を提供する。
【0017】
スマートノード110およびSRR108は、受信機が表すその位置または位置IDに基づいて、一緒にグループ化され少なくとも1つの位置アイデンティティ(ID)と関連付けられる。一実施形態では、全位置が少なくとも1つのスマートノード110またはSRR108でカバーされる。ハイブリッドタグ104のIDがスマートノード110またはSRR108のいずれかで受信されれば、ハイブリッドタグ104はその位置内にある。
【0018】
上記RF追跡方法では位置誤差が許容されなければならない。ピンポイントの精度が必要なときには、ハイブリッドタグ104の位置が複数のRFIDタグリーダ106の1つを用いてマニュアルで更新される。これは、典型的にはパッシブRFIDリーダである、複数のRFIDタグリーダ106の1つを用いてIDを読むために、システムユーザが追跡された人や物と物理的にともに位置付けられる必要があることから、ピンポイントの精度と考えられる。
【0019】
スマートノード110およびRFIDタグリーダ106は、それぞれローカルエリアネットワーク(LAN)に接続されている。各スマートノード110およびRFIDタグリーダ106から受信されたデータはネットワークを介してコントローラサーバ122に送られてもよい。コントローラサーバ122は次にデータをデータサーバ124に格納する。アプリケーションサーバ126は、データベースサーバ124に格納されたデータを用い「スマートトラック(SmartTRAC)」アルゴリズムと呼ばれるソフトウエアを用いて各ハイブリッドタグ104の位置を算出(generate)する。
【0020】
一実施形態では、SRR108がRF手段を介して受信したデータを、コントローラサーバ122に送ることに代えて、スマートノード110に転送する。
【0021】
図2は、本発明の一実施形態による無線周波数識別タグアセンブリのブロック図を示す。RFIDタグアセンブリすなわちハイブリッドタグ104は、アクティブRFIDタグ部128およびパッシブRFIDタグ部130を含む。アクティブRFIDタグ部128は、電源ユニット132、通常時閉じた(NC)リードスイッチ134、RF送信機136、アクティブRFIDプロセッサ138、アクティブRFIDメモリ部140、アンテナ142およびサーミスタ144を含む。パッシブRFIDタグ部130は、パッシブRFIDメモリ部146、パッシブRFIDプロセッサ148、アナログフロントエンド(analog front end)150およびトランスポンダコイル152を含む。
【0022】
アクティブRFIDタグ部128に関して、電源ユニット132は電池素子で構成でき、アクティブRFIDタグ部128に電力を供給する。通常時閉じたリードスイッチ134は、通常状態においてスイッチが閉じられるように内蔵バイアスマグネット(inbuilt biasing magnet)を含んでいてもよい。磁界ではスイッチが閉じられるようにバイアスマグネットが作動する。通常時閉じたリードスイッチ134の一例としてはRREインディア社(RRE India limited)のR−5B−Sリードセンサが挙げられる。RF送信機136はアンテナ142を介してアクティブRFIDタグ部128からの情報を受信機に送信するために用いられる。アクティブRFIDプロセッサ138はアナログ−デジタルコンバータ(ADC)を有するマイクロコントローラを含んでいてもよい。アクティブRFIDプロセッサ138はアクティブRFIDタグ部128内でデータを処理するために使用される。アクティブRFIDタグ部128についての情報はアクティブRFIDメモリ部140に格納される。アクティブRFIDメモリ部140は、例えば、電気的に消去書き込み可能な読出し専用メモリ(EEPROM)等の不揮発性メモリを含んでいてもよい。サーミスタ144は無線の温度計としてハイブリッドタグ104の小型化を許容する。RF送信機136、アクティブRFIDプロセッサ138およびアクティブRFIDメモリ部140の組み合わせ(combination)はアクティブRFID回路139と呼ばれる。通常時閉じたリードスイッチ134はアクティブRFID回路139に接続されており、通常時閉じたリードスイッチ134は、磁界環境に置かれるとアクティブRFID回路139が電源ユニット132から電気的に切断され、磁界環境外に置かれるとアクティブRFID回路139が電源ユニット132に電気的に接続されるように構成されている。加えて、分圧回路を形成するサーミスタを用いて、サーミスタ144に掛かる電圧から温度が算出される。マイクロコントローラのADCはサーミスタ144に掛かる電圧を測定するために定期的にサーミスタ144を標本化(sample)し、マイクロコントローラは測定された電圧を用いて温度を算出する。算出された温度はRFデータパケットに繰り込まれる。
【0023】
パッシブRFIDタグ部130に関して、パッシブRFIDトランスポンダコイル152には、送信コイルおよび受信コイルを含む弱く結合した変圧器(weakly coupled transformer)を用いることができる。信号が電磁誘導により送信コイルから受信コイルに送信される。パッシブRFIDトランスポンダコイル152の目的の1つは電磁誘導手段によって信号を送受信することにある。アナログフロントエンド150は、パッシブRFIDトランスポンダコイル152で受信したアナログ信号をデジタルデータに変換し、デジタルデータをアナログ信号に変換するものである。パッシブRFIDプロセッサ148はパッシブRFIDタグ部130内でデータを処理するために用いられる。パッシブRFIDプロセッサ148は何時および何を送受信するかについて予め定められた論理を有している。パッシブRFIDタグ部130についての情報はパッシブRFIDメモリ部146に格納されている。アクティブRFIDメモリ部140と同様に、パッシブRFIDメモリ部146は例えばEEPROM等の不揮発性メモリを含んでいてもよい。
【0024】
一実施形態では、効果的なRFID位置追跡システムを実現するには、しばしば複数のRFIDタグアセンブリ104を含み、各RFIDタグアセンブリ104はアクティブRFIDタグ部128およびパッシブRFIDタグ部130を含む。アクティブRFIDタグ部128すなわちアクティブRFIDタグは電池を電源とし無線結合で動作する。情報は低周波(LF)、高周波(HF)または極高周波(UHF)を用いて送信される。パッシブRFIDタグ部130すなわちパッシブRFIDタグはRFIDタグリーダ106から電力の供給を受け電磁結合で動作する。情報はRFIDタグリーダ106からの搬送信号を変調することでRFIDタグリーダ106に返す。
【0025】
一実施形態では、例えば、EPCグローバル標準等の国際標準に適合する既製の(off-the-shelf)パッシブRFIDタグ130がアクティブRFIDタグ128とともに使用される。1つのパッシブRFIDタグ130と1つのアクティブRFIDタグ128が単一のケーシング内に配置されて単一のRFIDタグアセンブリ104を構成する。これも、「ハイブリッドタグ」104と呼ばれる。
【0026】
一実施形態では、ハイブリッドタグ104のパッシブRFIDタグ130およびアクティブRFIDタグ128のそれぞれがユニークなIDを有し、パッシブRFIDタグ130およびアクティブRFIDタグ128は電気的に接続されていない、すなわち電気的に絶縁されている。
【0027】
一実施形態では、ユーザにとっての煩雑さを低減するために、パッシブRFIDタグIDまたはアクティブRFIDタグIDのいずれかの、ただ1つのIDが用いられる。
【0028】
一実施形態では、アクティブRFIDタグ128のアクティブRFIDタグIDは、アクティブRIFDタグ128のアクティブRFIDメモリ部140に格納されており、パッシブRFIDタグ130のパッシブRFIDメモリ部146にも格納されている。アクティブRFIDタグIDのパッシブRFIDタグ130のパッシブRFIDメモリ部146への格納は製造中に行われる。パッシブRFIDタグリーダ106によりハイブリッドタグ104が読み取られたときに、アクティブRFIDタグ128およびパッシブRFIDタグ130のIDがパッシブRFIDリーダ106により取得される。そして、パッシブRFIDタグリーダ106は、パッシブRFIDリーダID、パッシブRFIDタグIDおよびアクティブRFIDタグIDをシステムネットワークを介してコントローラサーバ122に送信しデータベースサーバ124に格納される。アプリケーションサーバ126のソフトウエアはパッシブRFIDタグIDを無視してアクティブRFIDタグIDのみ利用する。ユーザからみれば、ハイブリッドタグ104はアクティブRFIDタグ128のIDであるただ1つのIDを表示する。加えて、パッシブRFIDリーダIDは少なくとも1つの位置IDと関連付けられる。
【0029】
一実施形態では、アクティブRFIDタグ128のアクティブRFIDメモリ部140は代わりにパッシブRFIDのIDを格納する。アクティブRFIDタグ128により送信されたデータパケットはアクティブRFIDタグIDおよびパッシブRFIDタグIDを含む。スマートノード110またはSRR108によりデータパケットが受信され次第、該データパケットはネットワークを介してコントローラサーバ122に送信されデータサーバ124に格納される。パッシブRFIDタグIDのみが使用され、このためユーザにとっては、パッシブRFIDタグIDのみが存在する。
【0030】
一実施形態では、アクティブRFIDタグ部128とともに、またはハイブリッドタグにおいて、通常時閉じたリードスイッチ134の使用方法が提供される。アクティブRFIDタグ部128とともに、またはハイブリッドタグにおいて、通常時閉じたリードスイッチ134の使用は利用可能な電力を保存するのに役立つ。ハイブリッドタグ104は磁界を有するガントリ(gantry)を通過するので、一例としてハイブリッドタグ104を使用することは、通常閉じたリードスイッチ134が開放されハイブリッドタグ104のアクティブRFID回路139が電源ユニット132から電気的に絶縁される。ハイブリッドタグ104がガントリを過ぎてしまい磁界外に位置すれば、通常時閉じたリードスイッチ134は通常時の閉じた状態に戻り電源ユニット132に電気的に接続される。電力が供給され次第、アクティブRFID部128のマイクロコントローラのパワーオンリセットビットがセットされる。これにより、アクティブRFIDタグ部128は所定時間内にガントリデータパケットを継続して送信しその後パワーオンリセットビットはクリアされる。
【0031】
上述したガントリデータパケットはハイブリッドタグIDを含み、ガントリデータパケットはハイブリッドタグ104がガントリを今通過したことを示すものとして定義される。スマートノード110およびSRR108がガントリデータパケットを受信すると、スマートノード110およびSRR108はデータパケットにそれらのIDを付加しコントローラサーバ122に送信する。次にシステムは、ハイブリッドタグIDと位置に関連付けられたSRRのIDまたはスマートノードIDとを関連付ける。位置が既知でありハイブリッドタグ104がガントリを通過した表示により、システムはその位置のガントリをハイブリッドタグ104が通過したことを示すことができる。
【0032】
一実施形態では、通常時閉じたリードスイッチ134が登録用に使用することもできる。ハイブリッドタグ104が磁界を有する保存ケース内に置かれていると、通常時閉じたリードスイッチ134は開放されておりアクティブRFID回路139は電源ユニット132から電気的に絶縁される。ハイブリッドタグ104が保存ケースから取り出されると、通常時閉じたリードスイッチ134は通常時の閉じた状態に戻りアクティブRFID回路139に電気的に接続される。電力が供給され次第、アクティブRFID部128のマイクロコンピュータのパワーオンリセットビットがセットされる。これにより、アクティブRFIDタグ部128は所定時間内にガントリデータパケットを継続して送信しその後パワーオンリセットビットはクリアされる。システムは、登録パケットを受け取り次第、上述したハイブリッドタグ104にスイッチが入ったことを表示する。
【0033】
一実施形態では、RFIDタグアセンブリ104はアクティブRFIDタグ部128のみを含む。アクティブRFIDタグ部128は、電源ユニット132、通常時閉じたリードスイッチ134、RF送信機136、アクティブRFIDプロセッサ138、アクティブRFIDメモリ部140、アンテナ142およびサーミスタ144を含む。上述したように、RF送信機136、アクティブRFIDプロセッサ138およびアクティブRFIDメモリ部140の組み合わせはアクティブRFID回路139と呼ばれる。通常時閉じたリードスイッチ134はアクティブRFID回路139に接続されており、通常時閉じたリードスイッチ134は、磁界環境に置かれるとアクティブRFID回路139が電源ユニット132から電気的に切断され、磁界環境外に置かれるとアクティブRFID回路139が電源ユニット132に電気的に接続されるように構成されている。
【0034】
図3は、本発明の一実施形態による無線周波数識別タグアセンブリの分解図を示す。RFIDタグアセンブリ104は、上ケース154、パッシブRFIDタグ部130、アクティブRFIDタグ部128および底ケース156を含む。上ケース154および底ケース156は、例えばアクリロニトリルブタジエンスチレン(ABS)等の適正な部材で構成される。上ケース154および底ケース156はともに、パッシブRFIDタグ部130およびアクティブRFIDタグ部128を内蔵するために防水ケースを形成するようにしてもよい。パッシブRFIDタグ部130およびアクティブRFIDタグ部128は図2において上述したものである。
【0035】
図4は、本発明の一実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。上すなわち正面ケース154は、LED窓260およびバーコードすなわちシリアルナンバーラベル用の窓262を含む。LED窓260はユーザにタグアセンブリがアクティブであることを示すものである。底すなわち背面ケース156は、時計のようにサブジェクトの手首に固定されるリスト(手首)ストラップを配置するためのスロット264および赤外(IR)窓266を含む。一実施形態では、RFIDタグアセンブリ104はIRトランシーバを有する。IR窓266はRFIDタグアセンブリ104がIR通信を許容するように構成される。
【0036】
図5は、本発明のさらなる実施形態による無線周波数識別タグアセンブリのそれぞれの平面および背面図を示す。上すなわち正面ケース154は、LED窓260およびバーコードすなわちシリアルナンバーラベル用の窓262を含む。LED窓260はユーザにタグアセンブリがアクティブであることを示すものである。底すなわち背面ケース156は、サーミスタ用のメタルコンタクト268および赤外(IR)窓266を含む。一実施形態では、RFIDタグアセンブリ104はIRトランシーバを有する。IR窓266はRFIDタグアセンブリ104がIR通信を許容するように構成される。サーミスタはメタルコンタクト268と熱的に接触しており、メタルコンタクト268はサブジェクト(例えば、患者の皮膚)に熱的に接触している。サーミスタはメタルコンタクト268の温度を測定し、メタルコンタクト268は熱の良伝導体であるため、測定された温度は実質的に皮膚温度と同じである。
【0037】
図6は、本発明の一実施形態による、手術室(OT)複合体内での無線周波数識別タグアセンブリの実施例を示す。OT複合体162は、OT受付164、複数のOT166およびOTリカバリ(回復室)168を含む。一実施形態では、OT複合体162のワークフローに組み込まれたハイブリッドタグ104のパッシブRFIDタグ部130は、患者のピンポイントの位置を提供することができる。まず患者がOT受付164に到着すると、個人的特殊性等の患者の詳細や予定の診療時間が確認される。患者が指定されたOT166内に、上記例ではOT1に運ばれると、患者のハイブリッドタグ104が第1のパッシブRFIDリーダP1でスキャンされる。RFIDリーダP1は、このハイブリッドタグIDを追跡するアクティブRFIDタグ部128を使用不能にするために、ハイブリッドタグID、RFIDリーダIDおよびコマンドを含むデータパケットを送信する。同時に、位置が、RFIDリーダP1に関連付けられた位置に更新される。
【0038】
ハイブリッドタグ104を追跡するアクティブRFIDタグ部128が使用不能となっている間、ハイブリッドタグ104の位置は最後に知られた位置に関連付けられ、その位置はハイブリッドタグ104を読み取るために用いられるパッシブRFIDリーダに関連付けられた位置である。
【0039】
手術の後、患者はOTリカバリ168に移される。患者のハイブリッドタグ104は第2のパッシブRFIDリーダP2で再度スキャンされる。ほぼこのとき、ハイブリッドタグ104を追跡するアクティブRFIDタグ部128を使用可能とするために、ハイブリッドタグID、RFIDリーダIDおよびコマンドが送信され、アクティブRFIDタグ部128による追跡が再度行われるようにスマートトラックアルゴリズムが使用される。無線周波数識別タグアセンブリの実施例は適正なビルや家屋敷内でも行われる。
【0040】
図7は、本発明の一実施形態による、図6に示す手術室複合体内での無線周波数識別タグアセンブリの実施例のフローチャートを示す。
【0041】
ステップ176で実行が開始される。ステップ176では、ハイブリッドタグ104が患者に発行され、患者の位置IDを追跡する方法が実行される。
【0042】
次のステップ178では、パッシブRFIDデータパケットを受信したかが判断される。パッシブRFIDリーダにより送信されたパッシブRFIDデータパケットには、ハイブリッドタグ104のパッシブID、アクティブIDおよび特定のハイブリッドタグ104を追跡するアクティブRFIDタグ部128を使用可能または使用不能とするかの情報をシステムに通知するためのコマンドを含む。ステップ178でパッシブRFIDデータパケットが受信されたと判断されると、処理はステップ180に進み、そこではアクティブRFIDタグ部128の追跡を使用可能または使用不能とするかが判断される。
【0043】
アクティブRFIDタグ部128の追跡を使用不能とすべきと判断されたときは、処理はステップ182に進み、そこではアクティブRFIDタグ部の追跡が使用不能とされる。アクティブRFIDタグ部128の追跡を使用可能とすべきと判断されたときは、処理はステップ184に進み、そこではアクティブRFIDタグ部の追跡が使用可能とされる。
【0044】
ステップ182、184に続き、処理はステップ186に進み、そこでは現在のパッシブRFIDタグ部130の位置が報告される。
【0045】
ステップ186に続き、処理はステップ178に戻り、そこではパッシブRFIDデータパケットを受信したかが再度判断される。ステップ178でパッシブRFIDデータパケットが受信されていないと判断されると、処理はステップ188に進み、そこではアクティブRFIDタグ部128の追跡が使用可能か使用不能かが判断される。
【0046】
アクティブRFIDタグ部128の追跡が使用可能と判断されると、処理はステップ190に進み、そこではスマートトラックアルゴリズムがアクティブ化される。アクティブタグ部128の追跡が使用不能と判断されると、処理はステップ192に進み、そこでは最後に知られた位置が報告される。
【0047】
ステップ190、192に続き、処理はステップ178に再度戻る。
【0048】
図8は、本発明の一実施形態による、粗い位置確認受信機および細かい位置確認受信機のそれぞれの呼び掛けゾーン(interrogation zones)を示す。粗い位置確認受信機すなわちスマートノード110は、比較的広い受信エリアすなわち位置確認ゾーン198を有し、各粗い位置確認受信機110はハイブリッドタグ104の粗い位置確認を提供するために使用される。細かい位置確認受信機すなわちSRR194、196は、スマートノード110と比較し、各々がより狭い受信エリアすなわち位置確認ゾーン200、202を有する。従って、各SRR194、196はハイブリッドタグ104の細かい位置確認を提供する。
【0049】
図8では、ハイブリッドタグ104はエリア1、200内に位置付けられている。スマートノード110の受信エリア(位置確認ゾーンとも呼ぶ)はSRR1、194、SRR2、196の各受信エリアと比較して大きいため、スマートノード110はハイブリッドタグ104の粗い位置確認を提供する。スマートノード110は、半径約10メートルのゾーン1、198の大きな受信エリアを有している。SRR194、196は、それぞれ半径約5メートルのエリア1、200およびエリア2、202の小さな受信エリアを有している。受信エリアが小さいので、SRR194、196はハイブリッドタグ104がSRR194、196の近くにある場合のみデータパケットを受信する。ハイブリッドタグ104からのデータパケットを受信し次第、SRR1、109は受信したデータパケットにそのIDを付加し修正したデータパケットを再送信する。再送信されたデータパケットはスマート110に宛てられる。スマートノード110は、再送信されたデータパケットを受け取り次第、それをコントローラサーバ122に送信する。次いでシステムはハイブリッドタグIDをエリア1、200に関連付けられたSRR1のIDと関連付ける。それにより、ハイブリッドタグ104の位置はエリア1、200内にあることが認識される。
【0050】
一実施形態では、スマートノード110は無線周波数(RF)受信機である。それはハイブリッドタグ104およびSRR194、196からのデータパケットを受信する役割を担う。受信されたデータはLANを介してコントローラサーバ122に伝達される。各スマートノード110は各自のユニークなIDを有する。
【0051】
一実施形態では、スマートノード110は、スマートセンス位置追跡システムが実行されるエリアに分散されている。システムはエリアのリストを持っており、各エリアには位置IDが与えられる。各スマートノード110には少なくとも1つの位置IDが割り当てられる。従って、スマートノード110の群は位置を表す。
【0052】
スマートノード110がハイブリッドタグ104からデータパケットを受信すると、スマートノード110はデータパケットにそのIDを付加しコントローラサーバ122に送信する。ハイブリッドタグIDとスマートノードIDとにより、システムはハイブリッドタグIDをスマートノードIDに割り当てられた位置IDに関連付けることができる。位置IDをハイブリッドタグIDに関連付けることにより、ハイブリッドタグ104の位置が認識される。
【0053】
SRR194、196は、ハイブリッドタグ104のより正確な位置を演算するためにスマートトラックアルゴリズム用の付加データを提供することによりスマートノード110を補完する。各SRR194、196はユニークなIDを有しており位置IDに関連付けられている。
【0054】
一実施形態では、各SRR194、196は、RF受信機、RF送信機およびマイクロコントローラで構成される。RF受信機はハイブリッドタグ104からのRFデータパケットを受信する役割を担い、マイクロコントローラはデータパケットにSRRのIDを付加しRF送信機を介してスマートノード110にデータパケットを再送信する。
【0055】
SRR受信機はスマートノード110に比べ小さな受信範囲すなわち受信エリアを有する。RF送信機はハイブリッドタグ104に比べより高い送信出力を有する。従って、SRR108は小さな受信範囲および高い送信範囲を有する。
【0056】
一実施形態では、各SRRの受信部の受信範囲は低い信号強度閾値と高い信号強度閾値とに変更することで調整可能である。低い信号強度閾値を下回る信号はSRRの受信範囲の外側にあるものとみなされる一方、高い信号強度閾値を上回る信号はSRRの受信範囲すなわち受信エリア内にあるものとみなされる。
【0057】
第1の実行例では、SRRは一般に信号強度表示を有する受信機を備えている。信号強度表示に基づいて、SRRは低い信号強度閾値および高い信号強度閾値に基づいてデータパケットを拒絶するか受け容れるかの選択が可能である。
【0058】
低い信号強度閾値および高い信号強度閾値は経験的方法により決定することができる。SRRは好ましい配置設定で配することができる。送信ハイブリッドタグはSRRから指定された距離離れて配置することができる。異なる距離での信号強度は各々決定される。例えば、SRRが基準位置に配置されハイブリッドタグはSRRから約2メートル離れて配置される。各データパケットの信号強度は約15分の間隔で記録される。約15分後、約2メートルでの平均信号強度が算出される。その後、距離を約4メートルに増加させ、各データパケットの信号強度が約15分の間隔で記録される。再度、約4メートルでの平均信号強度が算出される。このプロセスは例えば約10メートルの距離となるまで繰り返される。ハイブリッドタグの数が多ければ種々の距離での信号強度をより良好に推定可能である。
【0059】
ハイブリッドタグの信号強度は、ハイブリッドタグがSRRからどの程度離れているかを表すものである。SRR受信部の低い信号強度閾値および高い信号強度閾値は上述したように種々の値で設定可能である。SRRの配置がハイブリッドタグをピンポイントで特定する程の高精度が要求される場合には、高い信号強度閾値および低い信号強度閾値は高い値となり(例えば、2メートルの範囲内)、これによりSRRは近接した範囲内でハイブリッドタグを検出することができるようになる。SRRの数を最小とすることが求められ広い受信範囲で配置される場合には、その範囲は最小の低い信号強度閾値および高い信号強度閾値に設定すればよい。
【0060】
他の実行例では、受信部のSRR信号強度閾値はハードウエア構成で変更される。受信機の感度が低減されることによって低い信号強度閾値および高い信号強度閾値が増加される。
【0061】
一実施形態では、低い信号強度閾値および高い信号強度閾値を区別する必要はなく実質的に同じである。
【0062】
上述した実行例では、SRRのRF受信機は損失アンテナ(lossy antenna)で構成されていてもよい。損失アンテナは非共振値に対しパッシブインピーダンスが適合する部材を調整することで実行される。受信機のアンテナ設計も感度を下げるように変更することが可能である。例えば、アンテナサイズの変更、アンテナ長さの変更、アンテナ形状の変更を挙げることができる。信号レベルの閾値を増加させるため、RFアテニュエータ(減衰器)を受信機のアンテナに付加するようにしてもよい。損失アンテナ設計上でのRFアテニュエータ設計の利点は、その波形を容易に歪曲することなくRFアテニュエータが信号の増幅すなわちパワーを減少させることにある。
【0063】
図9は、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のソフトウエア構成を示す。スマートタグサーバアプリケーション204はコントローラサーバ122内に存在し、スマートノード110で受信されたデータパケットを収集しそのデータパケットをスマートセンスデータベース206に格納する役割を担う。スマートセンスデータベース206はデータベースサーバ124内に存在する。位置エンジン208はアプリケーションサーバ206内に存在し、スマートセンスデータベース206内に格納されたデータパケットを解釈、処理し演算した位置結果をスマートセンスデータベース206に返す役割を担う。位置エンジン208はスマートトラックアルゴリズムを用い位置結果を演算する。アプリケーションサーバ126内に存在するスマートセンスウエブサーバ210はユーザに位置結果を表示する。
【0064】
図10A〜図10Gは、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法の各シナリオを示す。図10Aは、スマートセンスシステムの簡略化した構成を示す。部屋Aには、3つのスマートノード、すなわち、A1、A2およびA3、並びに、SRR、すなわち、A4が取り付けられており、部屋Bには、3つのスマートノード、すなわち、B1、B2およびB3が取り付けられている。図10Aに示すように、ハイブリッドタグ(H1)を装着したサブジェクトすなわち人は部屋Aに位置している。
【0065】
図10Bは、各スマートノードおよびSRRにより受信されたデータパケットを示す。まず、H1は強い信号データパケット(P1)を送信し、データパケットはA1、A2、A3、A4、B1、B2およびB3で受信される。次に、H1は弱い信号データパケット(P2)を送信し、そのデータパケットはA1、A2、A4、B1およびB2により受信される。A1、A2、A4、B1、B2は強い信号データパケットP1および弱い信号データパケットP2を受信する。A3およびB3は強い信号データパケットP1のみ受信する。
【0066】
データパケットの各タイプは異なった重み付けを有していてもよい。例えば、強い信号データは低い重み付けを有しており、弱い信号データは高い重み付けを有していてもよい。P1は強い信号データパケットでλ=1の重みを有しており、P2は弱い信号データパケットでλ=2の重みを有するものとすることができる。
【0067】
各スマートノードまたはSRRについて、これらが受信したデータパケットに基づいてスコアNが演算される。
【数1】
【0068】
図10Cは、各スマートノードおよびSRRのスコアを示したものである。A1はP1およびP2の両者を受信したため、A1のスコアNは3である。A2、A4、B1およびB2は、これらがA1と同じくP1およびP2を受信したため、同じスコアとなる。
【数2】
【0069】
A3およびB3はP1のみ受信しており、A3およびB3各々のスコアNは1である。
【数3】
【0070】
各スマートノードおよびSRRは各位置について係数βを有する。βは、追跡されたサブジェクトの予定位置や、スマートノードおよびSRRが所定位置で追跡されたサブジェクトから受信するデータパケットのプロファイルを考慮して決定される。
【0071】
一実施形態では、係数βは人や物の位置履歴に基づいて予定の動きも考慮して決定される。予定の動きには、動きの方向、動きのスピードおよび人や物が存在するエリアのレイアウト等のファクタを考慮してもよい。これらのファクタの1つ以上を用いることで、人や物が次にどこに位置するかを予測することができ、このため予定された位置でスマートノードおよびSRRにより大きな重みを割り当てることができる。
【0072】
図10Dは、部屋Aにおける全てのスマートノードおよびSRRの係数βを示すものである。それぞれ、A1、A2およびA3の係数βは2、A4の係数βは3、B1、B2およびB3の係数βは1である。
【0073】
図10Eは、部屋Bにおける全てのスマートノードおよびSRRの係数βを示すものである。それぞれ、A1、A2、A3およびA4の係数βは1、B1、B2およびB3の係数βは2である。
【0074】
全てのスマートノードおよびSRRの各Nおよびβが演算された後、各位置でのスコアLが演算される。各位置でのLはNとβとの積を合算することで求めることができる。
【数4】
【0075】
図10Fは、部屋AにおけるスコアLの演算を示したものである。
【数5】
【0076】
図10Gは、部屋BにおけるスコアLの演算を示したものである。
【数6】
【0077】
Lについて最も高いスコアを有する位置がハイブリッドタグの位置である。上記の例では、部屋Aが30の高いスコアを有しているため、ハイブリッドタグは部屋Aに存在する。
【0078】
仮に、2つ以上の位置で最も高いスコアが同じ場合には、そのすべての位置が可能性のある位置と考えられ、ハイブリッドタグの位置デーブルにおいて前の位置を見直すことで決定される。前の位置が可能性のある位置のリストに存在すれば、現在の位置はハイブリッドタグのテーブルにおける前の位置であると認識される。前の位置が可能性のある位置のリストにない場合には、ハイブリッドタグのテーブルにおいて可能性のある位置のリストにおける最初の位置が更新される。
【0079】
図11は、本発明の一実施形態による、サブジェクトの位置IDを追跡する方法のフローチャートを示す。位置IDを追跡する方法は「スマートトラック」(SmartTRAC)アルゴリズムと呼ばれる。位置IDを追跡する方法はステップ218で開始される。
【0080】
次にステップ220において、予め設定された時間間隔が経過したか否かが判断される。本形態では、時間間隔は2分に設定されているがこれに限るものではない。2分の時間間隔が経過したと判断されると、処理はステップ222に進み、そこでは2分の時間間隔内での全ての記録が選択される。一方、2分の時間間隔が経過していないと判断されたときには、処理は引き続き2分の時間間隔が経過したかを確認する。
【0081】
ステップ222の後、処理はステップ224に進み、そこでは各スマートノードまたはSRRについてスコアNが演算される。これに続きステップ226では、各位置について、Nと各スマートノードまたはSRRについての適正な重みβとが乗算される。
【0082】
次にステップ228では、各位置についてスマートノードおよび/またはSRRの総数に基づいてスコアLが演算される。
【0083】
次いでステップ230では、最も高いスコアLが1つだけか否かが判断される。特定の位置における最も高いスコアLが1つだけの場合には、処理はステップ232に進み、そこでは位置が報告される。しかしながら、最も高いスコアLが1つだけではないと判断されると、処理はステップ234に進み、そこではハイブリッドタグの位置履歴が確認される。
【0084】
そして、処理はステップ232に進み、そこでは位置が報告される。
【0085】
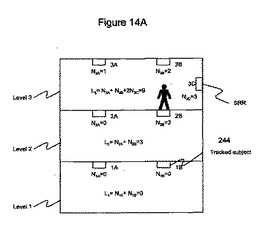
図12A〜図12Eは、本発明の一実施形態による、各位置IDと予め設定されたグループの受信機との関連付けを含む、サブジェクトの位置IDを追跡する方法を示す。図12Aは、各階に2つのスマートノードが取り付けられた3階建てのビルの例を示すものである。スマートノード3Aおよび3Bは3階に取り付けられており、スマートノード2Aおよび2Bは2階に取り付けられており、スマートノード1Aおよび1Bは1階に取り付けられている。追跡されたサブジェクト244は3階のスマートノード3Bの近くに位置している。
【0086】
図12Bでは、各スマートノードがその階内でのみデータパケットを受信すると想定している。従って、アルゴリズムはどのスマートノードがデータパケットを受信しスマートノードに関連する位置を認識することを含む。図12Bでは、3階でスマートノードN3AおよびN3Bが追跡されたサブジェクト(被追跡者)244からデータパケットを受信する。N3Aは1でありN3Bは2である。3階のスコアL3はN3AとN3Bとの合計であり、それは3である。2階では、N2AおよびN2Bはそれぞれ0である。従って、2階のスコアL2はN2AとN2Bとの合計であり、それは0である。同様に1階では、N1AおよびN1Bはそれぞれ0である。従って、1階のスコアL1はN1AとN1Bとの合計であり、それも0である。これら3つの階におけるスコアLを比較することで、L3は3の最も高いスコアを有する。従って、追跡されたサブジェクト244は3階にいると認識できる。
【0087】
図12Bは理想的な状態の例を示したものである。しかしながら、実際に実行する場合には、データパケットは他の階でも受信される。このことはスマートノードが高い天井に取り付けられた場合、すなわち、ハイブリッドタグと下の階のスマートノードとの距離がハイブリッドタグと同じ階のスマートノードとの距離より短い場合に発生する。しばしば、下の階のスマートノードがより多くデータパケットを受信する場合がある。
【0088】
図12Cは、スマートノード3Aおよび3Bがそれぞれ1つおよび2つのデータパケットを受信する同じ構成を考慮した例であるが、この例ではスマートノード2Bが3つのデータパケットを受信する。3階のL3は3であり、2階のL2は3であり、1階のL1は0である。これに関し、3階のトータルスコアLのL3と2階の全スコアLのL2とが同じなため、各階で受信されたデータパケットの総数を合算することは無益である。上述したアルゴリズムを採用すれば、2つの階でのトータルスコアLが同じなため、サブジェクトは3階または2階にいると決定される。
【0089】
従って、図12Dでは、スマートノードの物理的グループ化に代えて論理的グループ化が導入されている。現場調査から、前に示したようにサブジェクトが上記の位置にいるときには、スマートノード2Bはデータパケットを受信し続ける。従って、2階に関連するスマートノードは2Aおよび2Bであるが、3階に関連するスマートノードは3A、3Bおよび2Bということになる。
【0090】
このような関連を構築することで、図12Eでは、各位置について各スマートノードで受信されたデータパケットの数を合算するアルゴリズムを含んでいる。最も高いスコアLの位置は追跡されたサブジェクト244の位置である。図12Eから、3階は6のスコアL3を有し、2階は3のスコアL2を有し、1階は0のスコアL1を有している。従って、サブジェクトは3階に位置している。
【0091】
図13A〜図13Bは、本発明の一実施形態による、受信機の受信機タイプに基づく重み付けを含む、サブジェクトの位置IDを追跡する方法を示す。上述したアルゴリズムは、各位置における各スマートノードに対する重み付けを導入することにより、より一般化することができる。スマートノードに重み付けを導入することの利点を、図13Aと図13Bとを対照して説明する。
【0092】
図13Aおよび図13Bは、それぞれ各階に取り付けられた2つのスマートノードを有する3階建てのビルの例を示すものである。スマートノード3Aおよび3Bは3階に取り付けられており、スマートノード2Aおよび2Bは2階に取り付けられており、スマートノード1Aおよび1Bは1階に取り付けられている。追跡されたサブジェクト244は3階のスマートノード3Bの近くに位置している。
【0093】
図13Aにおいて、3階におけるN3AおよびN3Bはそれぞれ2である。2階におけるN2AおよびN2Bもそれぞれ2である。1階におけるN1AおよびN1Bはそれぞれ0である。3階におけるスコアL3はN3A、N3B、N2AおよびN2Bの合計であり、それは8である。2階におけるスコアL2はN3A、N3B、N2A、N2B、N1AおよびN1Bの合計であり、それも8である。1階におけるスコアL1はN2A、N2B、N1AおよびN1Bの合計であり、それは4である。3つの階におけるスコアLを比較することで、L3とL2とは8の同じスコアを有する。従って、図13Aではサブジェクトを認識することは難しい。
【0094】
図13Bでは、受信機の受信機タイプに基づいて重み付けが割り当てられている。3階におけるN3AおよびN3Bはそれぞれ2である。2階におけるN2AおよびN2Bもそれぞれ2である。1階におけるN1AおよびN1Bはそれぞれ0である。3階におけるスコアL3はN3A、N3B、0.5N2Aおよび0.5N2Bの合計であり、それは6である。2階におけるスコアL2はN3A、N3B、0.33N2A、0.33N2B、0.33N1Aおよび0.33N1Bの合計であり、それは5.32である。1階におけるスコアL1は0.5N2A、0.5N2B、N1AおよびN1Bの合計であり、それは2である。3つの階におけるスコアLを比較することで、L3は6の最も高いスコアを有する。従って、図13Bにおいてサブジェクトを認識することが可能となる。
【0095】
図14A〜図14Bは、本発明の一実施形態による、細かい位置確認受信機が使用され得る例を示す。細かい位置確認受信機すなわちSRRを使用することは、サブジェクトの位置をより高い精度で提供することである。これはSRRが非常に狭い受信範囲を有するという事実によるものであり、従って他の階から送信されたデータパケットはSRRにより受信されない。
【0096】
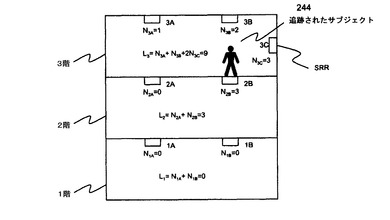
図14Aは、3階に2つのスマートノード3Aおよび3Bと1つのSRR3Cが取り付けられ、2階に2つのスマートノード2Aおよび2Bが取り付けられ、1階に2つのスマートノード1Aおよび1Bが取り付けられていることを示す。
【0097】
3階における各スマートノードまたはSRRが受信したデータパケットの数に基づいて、スコアNは、それぞれN3A=1、N3B=2、N3C=3である。2階における各スマートノードが受信したデータパケットの数に基づいて、スコアNは、それぞれN2A=0、N2B=3である。1階における各スマートノードが受信したデータパケットの数に基づいて、スコアNは、それぞれN1A=0、N1B=0である。
【0098】
SRRは非常に狭い受信範囲を有するため、他の階から送信されたデータパケットはSRRによって受信されない。従って、スマートノードに比べ高い重み付けがSRRに割り当てられる。スマートノード3Aおよび3Bの1の重み付けに対し、SRR3Cは2のより高い重み付けを有している。従って、3階におけるスコアL3は9である。スマートノード2A、2Bはそれぞれ1の重み付けを有する。従って、2階におけるスコアL2は3である。スマートノード1Aおよび1Bはそれぞれ1の重み付けを有する。従って、1階におけるスコアL1は0である。L3は最も高いスコアを有しており、サブジェクト244は3階にいる。
【0099】
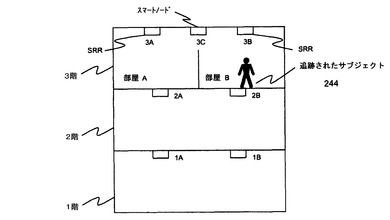
SRRの他の使用はエリアをさらに分割することにある。図14Bに示すように、一実施形態では、3階はパーティションで2つの部屋、すなわち、部屋Aおよび部屋Bに分割することができる。第1のSRR3Aは部屋Aに配置でき、第2のSRR3Bは部屋Bに配置できる。スマートノード3Cは部屋Aと部屋Bとの間に配置できる。SRR3Aおよび3Bは狭い受信範囲を有するため、SRR3Aおよび3Bはそれらの各部屋のみカバーする。スマートノード3CはSRR3Aおよび3Bのデータパケットをコントローラサーバにアップロードすることが求められる。サブジェクト244は部屋Bに位置しているため、SRR3Bだけがサブジェクトのハイブリッドタグからのデータパケットを受信可能である。
【0100】
図15Aおよび図15Bは、本発明の一実施形態による、位置確認上で弱および強信号データパケット(weak and strong signal data packets)を使用することの効果を示す。弱および強信号データパケットは、受信範囲を犠牲にすることなく、スマートセンスシステムが良好な位置確認を達成することを可能にする。図15Aおよび図15Bは弱および強信号データパケットがどのように互いに補完するかを示すものである。弱信号データパケットのみが用いられるとすると、信号がどのスマートノードにも到達しない状況が起こり得る。ブラインドスポットをなくすため、受信範囲を確保するためのより多くのスマートノードが必要となる。一方、強信号データパケットは階を越えての送信をもたらす。
【0101】
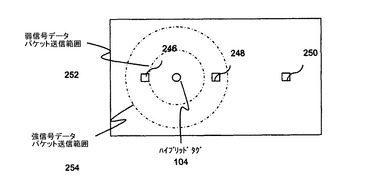
図15Aおよび図15Bは、互いに離れて位置付けられた複数のスマートノード246、248および250を示す。図15Aは、スマートノード246およびスマートノード248間で、スマートノード246およびスマートノード248からそれぞれ等距離に位置付けられたハイブリッドタグ104を示す。ハイブリッドタグ104は、小さな円252の参照符号が付された弱信号データパケット送信範囲および大きな円254の参照符号が付された強信号データパケット送信範囲を有する。図15Aは、弱信号データパケットのみが送信された場合、信号がスマートノード246およびスマートノード248のいずれにも到達しないことを示している。そして強信号データパケットが送信されると、スマートノード246およびスマートノード248は信号を受信し、それによって階を跨るまたはエリアを跨る送信となる。
【0102】
図15Bは、スマートノード246およびスマートノード248の間で、スマートノード248の近くに位置付けられたハイブリッドタグを示す。図15Aと同様に、ハイブリッドタグ104は、小さな円252の参照符号が付された弱信号データパケット送信範囲および大きな円254の参照符号が付された強信号データパケット送信範囲を有する。図15Aとは異なり、図15Bは、弱信号データパケットのみが送信された場合、信号がスマートノード248に到達する。そして強信号データパケットが送信されると、スマートノード248はこの信号も受信する。これは、ハイブリッドタグ104がスマートノード248の近くに位置付けられているため、図15Aの状況とは異なっている。従って、信号がどのスマートノードにも到達しないという状況や、階を跨るまたはエリアを跨る送信を避けるために、よい受信範囲を提供するため多くのスマートノードが採用される。
【0103】
図16A〜図16Cは、本発明の一実施形態による、データタイプに基づく重み付けの割り当てを含む、サブジェクトの位置IDを追跡する方法の各シナリオを示す。
【0104】
図16Aは、各階に2つのスマートノードが取り付けられた3階建てのビルを示す。スマートノード3Aおよび3Bは3階に取り付けられ、スマートノード2Aおよび2Bは2階に取り付けられ、スマートノード1Aおよび1Bは1階に取り付けられている。ハイブリッドタグを装着した追跡されたサブジェクト244は3階でスマートノード3Bの近くに位置付けられている。
【0105】
追跡されたサブジェクト244からのハイブリッドタグはまず強信号データパケットを送信する。図16Aに示すように、スマートノード3A、3Bおよび2Bは強信号データパケットを受信する。
【0106】
強信号データパケットを送信した後、ハイブリッドタグは弱信号データパケットを送信する。図16Bに示すように、弱信号データパケットはスマートノード3Bのみに受信される。
【0107】
弱信号データパケットを受信するスマートノードの呼び掛けゾーンにハイブリッドタグがある可能性は、強信号データパケットを受信する他のスマートゾーンの他の呼び掛けゾーンにハイブリッドタグがある可能性よりも高いため、高い重み付けが弱信号データパケットに与えられ、低い重み付けが強信号データパケットに与えられる。
【0108】
図16Cに示すように、λstongは1であり、λweakは2である。各スマートノードのスコアNは受信されたデータパケットの全ての重みを合計することで演算される。3階では、スマートノード3AについてのN3Aはλstongであり、それは1である。スマートノード3BについてのN3Bはλstongとλweakの合計であり、それは3である。2階では、スマートノード2AについてのN2Aは0であり、スマートノード2BについてのN2Bはλstongであり、それは1である。1階では、スマートノード1AについてのN1Aは0であり、スマートノード1BについてのN1Bは0である。
【0109】
次いで、各階のスコアNを合計することで各階のスコアLが演算され、Lについての最も高いスコアを有する階が追跡されたサブジェクト244の位置とされる。図16Cでは、3階のスコアL3はN3AとN3Bの合計であり、それは4である。2階のスコアL2はN2AとN2Bの合計であり、それは1である。1階のスコアL1はN1AとN1Bの合計であり、それは0である。従って、L3が4の最も高いスコアを有するため、追跡されたサブジェクト244は3階にいる。
【0110】
以下では、本発明のさらなる実施形態が説明される。
【0111】
本発明の一実施形態によれば、位置スコアがユニークかを決定することを含む位置スコアに基づいてサブジェクトの位置を決定する。
【0112】
本発明の一実施形態によれば、ユニークな位置スコアがない場合に無線周波数識別タグの位置履歴を確認する方法をさらに含む。
【0113】
本発明の一実施形態によれば、複数の受信機のうち第1の受信機のセットで無線周波数識別タグから第2の信号を受信する方法をさらに含む。
【0114】
本発明の一実施形態によれば、複数の受信機のうち第2の受信機のセットで無線周波数識別タグから第1の信号を受信する方法をさらに含む。
【0115】
本発明の一実施形態によれば、第1の受信機のセットの各々が第1の呼び掛けゾーンを含み、第2の受信機のセットの各々が第2の呼び掛けゾーンを含む。
【0116】
本発明の一実施形態によれば、第1の呼び掛けゾーンは第2の呼び掛けゾーンより小さい。
【0117】
本発明の一実施形態によれば、予め定められた時間間隔内で、第2の受信機のセットで受信したコントローラサーバ内の第1の信号および/または第2の信号を収集する方法をさらに含む。
【0118】
本発明の一実施形態によれば、データベースサーバに受信した信号を格納する方法をさらに含む。
【0119】
本発明の一実施形態によれば、格納した信号をアプリケーションサーバで処理し該処理した信号をデータベースサーバに保存する方法をさらに含む。
【0120】
本発明の一実施形態によれば、各位置を複数の受信機のうち予め定められたセットの受信機に関連付ける方法をさらに含む。
【0121】
本発明の一実施形態によれば、位置スコアを演算することには、さらにサブジェクトの予定された動き(projected movement)に基づいて位置スコアを演算することを含む。
【0122】
本発明の一実施形態によれば、サブジェクトの予定された動きは、サブジェクトの位置履歴、動きの方向、動きのスピードおよび位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する。
【0123】
本発明の一実施形態によれば、第1の信号は第1の予め設定された閾値を越える信号を含む。
【0124】
本発明の一実施形態によれば、第2の信号は第2の予め設定された閾値未満の信号を含む。
【0125】
本発明の一実施形態によれば、第2の予め設定された閾値は第1の予め設定された閾値より低い。
【0126】
本発明の一実施形態によれば、第2の予め設定された閾値は少なくとも実質的に第1の予め設定された閾値と同じである。
【0127】
本発明の一実施形態によれば、決定ユニットは、さらに位置スコアがユニークかを決定するように構成されている。
【0128】
本発明の一実施形態によれば、ユニークな位置スコアがない場合に無線周波数識別タグの位置履歴を確認する確認ユニットをさらに備えたシステムを含む。
【0129】
本発明の一実施形態によれば、複数の受信機のうちの第1のセットの受信機が無線周波数識別タグから第2の信号をさらに受信する。
【0130】
本発明の一実施形態によれば、複数の受信機のうちの第2のセットの受信機が無線周波数識別タグから第1の信号をさらに受信する。
【0131】
本発明の一実施形態によれば、第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、2のセットの受信機の各々が第2の呼び掛けゾーンを含む。
【0132】
本発明の一実施形態によれば、第1の呼び掛けゾーンが第2の呼び掛けゾーンより小さい。
【0133】
本発明の一実施形態によれば、システムは、第2のセットの受信機に接続されたコントローラサーバであって、予め定められた時間間隔内に第2のセットの受信機で受信した第1の信号および/または第2の信号を収集するコントローラサーバをさらに備える。
【0134】
本発明の一実施形態によれば、システムは、コントローラサーバに接続されたデータベースサーバであって、受信した信号を格納するデータベースサーバをさらに備える。
【0135】
本発明の一実施形態によれば、システムは、データベースサーバに接続されたアプリケーションサーバであって、格納した信号を処理するアプリケーションサーバをさらに備える。
【0136】
本発明の一実施形態によれば、システムは、各位置を複数の受信機のうちの予め定められたセットの受信機に関連付ける関連付けユニットをさらに備える。
【0137】
本発明の一実施形態によれば、演算ユニットは、さらにサブジェクトの予定された動きに基づいて位置スコアを演算するように構成されている。
【0138】
本発明の一実施形態によれば、サブジェクトの予定された動きは、サブジェクトの位置履歴、動きの方向、動きのスピードおよび位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する。
【0139】
本発明の一実施形態によれば、第1の信号は第1の予め設定された閾値を越える信号を含む。
【0140】
本発明の一実施形態によれば、第2の信号は第2の予め設定された閾値未満の信号を含む。
【0141】
本発明の一実施形態によれば、第2の予め設定された閾値は第1の予め設定された閾値より低い。
【0142】
本発明の一実施形態によれば、第2の予め設定された閾値は少なくとも実質的に第1の予め設定された閾値と同じである。
【0143】
本発明の一実施形態によれば、第1のセットの受信機は、無線周波数手段を介して第2のセットの受信機と通信する。
【0144】
本発明の一実施形態によれば、第2のセットの受信機は、通信ネットワークを介してコントローラサーバと通信する。
【0145】
本発明の一実施形態によれば、第1のタグが第1のタグ記憶部をさらに備える。
【0146】
本発明の一実施形態によれば、第1のタグIDが第1のタグ記憶部に格納される。
【0147】
本発明の一実施形態によれば、第1のタグおよび第2のタグが互いに電気的に絶縁される。
【0148】
本発明の一実施形態によれば、第2のタグの第2のタグ記憶部が不揮発性メモリである。
【0149】
本発明の一実施形態によれば、第1のタグの第1のタグ記憶部が不揮発性メモリである。
【0150】
本発明の一実施形態によれば、第1のタグがアクティブ無線周波数識別タグであり、第2のタグがパッシブ無線周波数識別タグである。
【0151】
本発明の一実施形態によれば、第1のタグがパッシブ無線周波数識別タグであり、第2のタグがアクティブ無線周波数識別タグである。
【0152】
本発明の一実施形態によれば、アクティブ無線周波数識別タグがサーミスタをさらに備える。
【0153】
本発明の一実施形態によれば、アクティブ無線周波数識別タグは、無線周波数識別回路と、無線周波数識別回路に接続され通常時閉じたスイッチと、を備え、通常時閉じたスイッチは、磁界環境下において無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において無線周波数識別回路が電源と電気的に接続されるように構成される。
【0154】
本発明を特定の実施形態を参照して具体的に説明してきたが、以下の請求の範囲で定義される発明の趣旨および範囲を越えることなく、当業者によって形態の種々の変更がなされ詳細はそれにより決定されることが理解される。このように発明の範囲は以下の請求の範囲に示され、請求の範囲と同等の意味および範囲内に入るすべての変形が包含される。
【特許請求の範囲】
【請求項1】
サブジェクトの位置を決定する方法であって、
複数の受信機のうち第1のセットの受信機で前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、前記無線周波数識別タグには無線周波数識別タグIDが割り当てられており、
複数の受信機のうち第2のセットの受信機で前記無線周波数識別タグから第2の信号を受信し、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なっており、
前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算し、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれており、
前記位置スコアに基づいて前記サブジェクトの位置を決定する、
方法。
【請求項2】
前記位置スコアがユニークかを決定することを含む位置スコアに基づいて前記サブジェクトの位置を決定する、請求項1に記載の方法。
【請求項3】
ユニークな位置スコアがない場合に前記無線周波数識別タグの位置履歴を確認することをさらに含む、請求項2に記載の方法。
【請求項4】
複数の受信機のうち前記第1のセットの受信機で前記無線周波数識別タグから前記第2の信号を受信することをさらに含む、請求項1ないし請求項3のいずれか1項に記載の方法。
【請求項5】
複数の受信機のうち前記第2のセットの受信機で前記無線周波数識別タグから前記第1の信号を受信することをさらに含む、請求項1ないし請求項4のいずれか1項に記載の方法。
【請求項6】
前記第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、前記第2のセットの受信機の各々が第2の呼び掛けゾーンを含む、請求項1ないし請求項5のいずれか1項に記載の方法。
【請求項7】
前記第1の呼び掛けゾーンが前記第2の呼び掛けゾーンより小さい、請求項6に記載の方法。
【請求項8】
予め定められた時間間隔内で、前記第2のセットの受信機で受信したコントローラサーバ内の前記第1の信号および/または前記第2の信号を収集することをさらに含む、請求項1ないし請求項7のいずれか1項に記載の方法。
【請求項9】
データベースサーバに前記受信した信号を格納することをさらに含む、請求項8に記載の方法。
【請求項10】
前記格納した信号をアプリケーションサーバで処理し該処理した信号を前記データベースサーバに保存することをさらに含む、請求項9に記載の方法。
【請求項11】
各位置を複数の受信機のうち予め定められたセットの受信機に関連付けることをさらに含む、請求項1ないし請求項10のいずれか1項に記載の方法。
【請求項12】
位置スコアを演算することには、さらに前記サブジェクトの予定された動きに基づいて位置スコアを演算することを含む、請求項1ないし請求項11のいずれか1項に記載の方法。
【請求項13】
前記サブジェクトの予定された動きは、前記サブジェクトの位置履歴、動きの方向、動きのスピードおよび前記位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する、請求項12に記載の方法。
【請求項14】
前記第1の信号は第1の予め設定された閾値を越える信号を含む、請求項1ないし請求項13のいずれか1項に記載の方法。
【請求項15】
前記第2の信号は第2の予め設定された閾値未満の信号を含む、請求項1ないし請求項14のいずれか1項に記載の方法。
【請求項16】
前記第2の予め設定された閾値は前記第1の予め設定された閾値より低い、請求項14または請求項15に記載の方法。
【請求項17】
前記第2の予め設定された閾値は少なくとも実質的に前記第1の予め設定された閾値と同じである、請求項14または請求項15に記載の方法。
【請求項18】
サブジェクトの位置を決定するシステムであって、
前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信する複数の受信機のうちの第1のセットの受信機であって、前記無線周波数識別タグに無線周波数識別タグIDが割り当てられた第1のセットの受信機と、
前記無線周波数識別タグから第2の信号を受信する複数の受信機のうちの第2のセットの受信機であって、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なった第2のセットの受信機と、
前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算する演算ユニットであって、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれた演算ユニットと、
前記位置スコアに基づいて前記サブジェクトの位置を決定する決定ユニットと、
を備えたシステム。
【請求項19】
前記決定ユニットは、さらに前記位置スコアがユニークかを決定するように構成された、請求項18に記載のシステム。
【請求項20】
ユニークな位置スコアがない場合に前記無線周波数識別タグの位置履歴を確認する確認ユニットをさらに備えた、請求項19に記載のシステム。
【請求項21】
複数の受信機のうちの前記第1のセットの受信機が前記無線周波数識別タグから前記第2の信号をさらに受信する、請求項18ないし請求項20のいずれか1項に記載のシステム。
【請求項22】
複数の受信機のうちの前記第2のセットの受信機が前記無線周波数識別タグから前記第1の信号をさらに受信する、請求項18ないし請求項21のいずれか1項に記載のシステム。
【請求項23】
前記第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、前記第2のセットの受信機の各々が第2の呼び掛けゾーンを含む、請求項18ないし請求項22のいずれか1項に記載のシステム。
【請求項24】
前記第1の呼び掛けゾーンが前記第2の呼び掛けゾーンより小さい、請求項23に記載のシステム。
【請求項25】
前記第2のセットの受信機に接続されたコントローラサーバであって、予め定められた時間間隔内に前記第2のセットの受信機で受信した前記第1の信号および/または前記第2の信号を収集するコントローラサーバをさらに備えた、請求項18ないし請求項24のいずれか1項に記載のシステム。
【請求項26】
前記コントローラサーバに接続されたデータベースサーバであって、前記受信した信号を格納するデータベースサーバをさらに備えた、請求項25に記載のシステム。
【請求項27】
前記データベースサーバに接続されたアプリケーションサーバであって、前記格納した信号を処理するアプリケーションサーバをさらに備えた、請求項26に記載のシステム。
【請求項28】
各位置を複数の受信機のうちの予め定められたセットの受信機に関連付ける関連付けユニットをさらに備えた、請求項18ないし請求項27のいずれか1項に記載のシステム。
【請求項29】
前記演算ユニットは、さらに前記サブジェクトの予定された動きに基づいて位置スコアを演算するように構成された、請求項18ないし請求項28のいずれか1項に記載のシステム。
【請求項30】
前記サブジェクトの予定された動きは、前記サブジェクトの位置履歴、動きの方向、動きのスピードおよび前記位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する、請求項29に記載のシステム。
【請求項31】
前記第1の信号は第1の予め設定された閾値を越える信号を含む、請求項18ないし請求項30のいずれか1項に記載のシステム。
【請求項32】
前記第2の信号は第2の予め設定された閾値未満の信号を含む、請求項18ないし請求項31のいずれか1項に記載のシステム。
【請求項33】
前記第2の予め設定された閾値は前記第1の予め設定された閾値より低い、請求項31または請求項32に記載のシステム。
【請求項34】
前記第2の予め設定された閾値は少なくとも実質的に前記第1の予め設定された閾値と同じである、請求項31または請求項32に記載のシステム。
【請求項35】
前記第1のセットの受信機は、無線周波数手段を介して前記第2のセットの受信機と通信する、請求項18ないし請求項34のいずれか1項に記載のシステム。
【請求項36】
前記第2のセットの受信機は、通信ネットワークを介して前記コントローラサーバと通信する、請求項18ないし請求項34のいずれか1項に記載のシステム。
【請求項37】
第1のタグであって、第1のタグIDを有する第1のタグと、
第2のタグであって、第2のタグIDおよび第2のタグ記憶部を有する第2のタグと、
を備え、第1のタグIDおよび第2のタグIDが前記第2のタグの前記第2のタグ記憶部に格納された無線周波数識別タグアセンブリ。
【請求項38】
前記第1のタグが第1のタグ記憶部をさらに備えた請求項37に記載の無線周波数識別タグアセンブリ。
【請求項39】
前記第1のタグIDが前記第1のタグ記憶部に格納された、請求項38に記載の無線周波数識別タグアセンブリ。
【請求項40】
前記第1のタグおよび前記第2のタグが互いに電気的に絶縁された、請求項37ないし請求項39のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項41】
前記第2のタグの前記第2のタグ記憶部が不揮発性メモリである、請求項37ないし請求項40のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項42】
前記第1のタグの前記第1のタグ記憶部が不揮発性メモリである、請求項38ないし請求項41のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項43】
前記第1のタグがアクティブ無線周波数識別タグであり、前記第2のタグがパッシブ無線周波数識別タグである、請求項37ないし請求項42のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項44】
前記第1のタグがパッシブ無線周波数識別タグであり、前記第2のタグがアクティブ無線周波数識別タグである、請求項37ないし請求項42のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項45】
前記アクティブ無線周波数識別タグがサーミスタをさらに備えた、請求項43または請求項44に記載の無線周波数識別タグアセンブリ。
【請求項46】
前記アクティブ無線周波数識別タグは、無線周波数識別回路と、前記無線周波数識別回路に接続され通常時閉じたスイッチと、を備え、前記通常時閉じたスイッチは、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された、請求項43または請求項44に記載の無線周波数識別タグアセンブリ。
【請求項47】
無線周波数識別回路と、
前記無線周波数識別回路に接続された通常時閉じたスイッチであって、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された通常時閉じたスイッチと、
を備えた無線周波数識別タグアセンブリ。
【請求項1】
サブジェクトの位置を決定する方法であって、
複数の受信機のうち第1のセットの受信機で前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信し、前記無線周波数識別タグには無線周波数識別タグIDが割り当てられており、
複数の受信機のうち第2のセットの受信機で前記無線周波数識別タグから第2の信号を受信し、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なっており、
前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算し、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれており、
前記位置スコアに基づいて前記サブジェクトの位置を決定する、
方法。
【請求項2】
前記位置スコアがユニークかを決定することを含む位置スコアに基づいて前記サブジェクトの位置を決定する、請求項1に記載の方法。
【請求項3】
ユニークな位置スコアがない場合に前記無線周波数識別タグの位置履歴を確認することをさらに含む、請求項2に記載の方法。
【請求項4】
複数の受信機のうち前記第1のセットの受信機で前記無線周波数識別タグから前記第2の信号を受信することをさらに含む、請求項1ないし請求項3のいずれか1項に記載の方法。
【請求項5】
複数の受信機のうち前記第2のセットの受信機で前記無線周波数識別タグから前記第1の信号を受信することをさらに含む、請求項1ないし請求項4のいずれか1項に記載の方法。
【請求項6】
前記第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、前記第2のセットの受信機の各々が第2の呼び掛けゾーンを含む、請求項1ないし請求項5のいずれか1項に記載の方法。
【請求項7】
前記第1の呼び掛けゾーンが前記第2の呼び掛けゾーンより小さい、請求項6に記載の方法。
【請求項8】
予め定められた時間間隔内で、前記第2のセットの受信機で受信したコントローラサーバ内の前記第1の信号および/または前記第2の信号を収集することをさらに含む、請求項1ないし請求項7のいずれか1項に記載の方法。
【請求項9】
データベースサーバに前記受信した信号を格納することをさらに含む、請求項8に記載の方法。
【請求項10】
前記格納した信号をアプリケーションサーバで処理し該処理した信号を前記データベースサーバに保存することをさらに含む、請求項9に記載の方法。
【請求項11】
各位置を複数の受信機のうち予め定められたセットの受信機に関連付けることをさらに含む、請求項1ないし請求項10のいずれか1項に記載の方法。
【請求項12】
位置スコアを演算することには、さらに前記サブジェクトの予定された動きに基づいて位置スコアを演算することを含む、請求項1ないし請求項11のいずれか1項に記載の方法。
【請求項13】
前記サブジェクトの予定された動きは、前記サブジェクトの位置履歴、動きの方向、動きのスピードおよび前記位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する、請求項12に記載の方法。
【請求項14】
前記第1の信号は第1の予め設定された閾値を越える信号を含む、請求項1ないし請求項13のいずれか1項に記載の方法。
【請求項15】
前記第2の信号は第2の予め設定された閾値未満の信号を含む、請求項1ないし請求項14のいずれか1項に記載の方法。
【請求項16】
前記第2の予め設定された閾値は前記第1の予め設定された閾値より低い、請求項14または請求項15に記載の方法。
【請求項17】
前記第2の予め設定された閾値は少なくとも実質的に前記第1の予め設定された閾値と同じである、請求項14または請求項15に記載の方法。
【請求項18】
サブジェクトの位置を決定するシステムであって、
前記サブジェクトに割り当てられている無線周波数識別タグから第1の信号を受信する複数の受信機のうちの第1のセットの受信機であって、前記無線周波数識別タグに無線周波数識別タグIDが割り当てられた第1のセットの受信機と、
前記無線周波数識別タグから第2の信号を受信する複数の受信機のうちの第2のセットの受信機であって、前記第2の信号は前記第1の信号とは異なり、前記第2のセットの受信機は前記第1のセットの受信機とは異なった第2のセットの受信機と、
前記第1の信号についての情報および前記第2の信号についての情報に基づいて位置スコアを演算する演算ユニットであって、前記第1の信号についての情報には前記第1の信号であることおよび前記第1のセットの受信機であることが含まれ、前記第2の信号についての情報には前記第2の信号であることおよび前記第2のセットの受信機であることが含まれた演算ユニットと、
前記位置スコアに基づいて前記サブジェクトの位置を決定する決定ユニットと、
を備えたシステム。
【請求項19】
前記決定ユニットは、さらに前記位置スコアがユニークかを決定するように構成された、請求項18に記載のシステム。
【請求項20】
ユニークな位置スコアがない場合に前記無線周波数識別タグの位置履歴を確認する確認ユニットをさらに備えた、請求項19に記載のシステム。
【請求項21】
複数の受信機のうちの前記第1のセットの受信機が前記無線周波数識別タグから前記第2の信号をさらに受信する、請求項18ないし請求項20のいずれか1項に記載のシステム。
【請求項22】
複数の受信機のうちの前記第2のセットの受信機が前記無線周波数識別タグから前記第1の信号をさらに受信する、請求項18ないし請求項21のいずれか1項に記載のシステム。
【請求項23】
前記第1のセットの受信機の各々が第1の呼び掛けゾーンを含み、前記第2のセットの受信機の各々が第2の呼び掛けゾーンを含む、請求項18ないし請求項22のいずれか1項に記載のシステム。
【請求項24】
前記第1の呼び掛けゾーンが前記第2の呼び掛けゾーンより小さい、請求項23に記載のシステム。
【請求項25】
前記第2のセットの受信機に接続されたコントローラサーバであって、予め定められた時間間隔内に前記第2のセットの受信機で受信した前記第1の信号および/または前記第2の信号を収集するコントローラサーバをさらに備えた、請求項18ないし請求項24のいずれか1項に記載のシステム。
【請求項26】
前記コントローラサーバに接続されたデータベースサーバであって、前記受信した信号を格納するデータベースサーバをさらに備えた、請求項25に記載のシステム。
【請求項27】
前記データベースサーバに接続されたアプリケーションサーバであって、前記格納した信号を処理するアプリケーションサーバをさらに備えた、請求項26に記載のシステム。
【請求項28】
各位置を複数の受信機のうちの予め定められたセットの受信機に関連付ける関連付けユニットをさらに備えた、請求項18ないし請求項27のいずれか1項に記載のシステム。
【請求項29】
前記演算ユニットは、さらに前記サブジェクトの予定された動きに基づいて位置スコアを演算するように構成された、請求項18ないし請求項28のいずれか1項に記載のシステム。
【請求項30】
前記サブジェクトの予定された動きは、前記サブジェクトの位置履歴、動きの方向、動きのスピードおよび前記位置のレイアウトからなる群から選択された少なくとも1つの事項に依存する、請求項29に記載のシステム。
【請求項31】
前記第1の信号は第1の予め設定された閾値を越える信号を含む、請求項18ないし請求項30のいずれか1項に記載のシステム。
【請求項32】
前記第2の信号は第2の予め設定された閾値未満の信号を含む、請求項18ないし請求項31のいずれか1項に記載のシステム。
【請求項33】
前記第2の予め設定された閾値は前記第1の予め設定された閾値より低い、請求項31または請求項32に記載のシステム。
【請求項34】
前記第2の予め設定された閾値は少なくとも実質的に前記第1の予め設定された閾値と同じである、請求項31または請求項32に記載のシステム。
【請求項35】
前記第1のセットの受信機は、無線周波数手段を介して前記第2のセットの受信機と通信する、請求項18ないし請求項34のいずれか1項に記載のシステム。
【請求項36】
前記第2のセットの受信機は、通信ネットワークを介して前記コントローラサーバと通信する、請求項18ないし請求項34のいずれか1項に記載のシステム。
【請求項37】
第1のタグであって、第1のタグIDを有する第1のタグと、
第2のタグであって、第2のタグIDおよび第2のタグ記憶部を有する第2のタグと、
を備え、第1のタグIDおよび第2のタグIDが前記第2のタグの前記第2のタグ記憶部に格納された無線周波数識別タグアセンブリ。
【請求項38】
前記第1のタグが第1のタグ記憶部をさらに備えた請求項37に記載の無線周波数識別タグアセンブリ。
【請求項39】
前記第1のタグIDが前記第1のタグ記憶部に格納された、請求項38に記載の無線周波数識別タグアセンブリ。
【請求項40】
前記第1のタグおよび前記第2のタグが互いに電気的に絶縁された、請求項37ないし請求項39のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項41】
前記第2のタグの前記第2のタグ記憶部が不揮発性メモリである、請求項37ないし請求項40のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項42】
前記第1のタグの前記第1のタグ記憶部が不揮発性メモリである、請求項38ないし請求項41のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項43】
前記第1のタグがアクティブ無線周波数識別タグであり、前記第2のタグがパッシブ無線周波数識別タグである、請求項37ないし請求項42のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項44】
前記第1のタグがパッシブ無線周波数識別タグであり、前記第2のタグがアクティブ無線周波数識別タグである、請求項37ないし請求項42のいずれか1項に記載の無線周波数識別タグアセンブリ。
【請求項45】
前記アクティブ無線周波数識別タグがサーミスタをさらに備えた、請求項43または請求項44に記載の無線周波数識別タグアセンブリ。
【請求項46】
前記アクティブ無線周波数識別タグは、無線周波数識別回路と、前記無線周波数識別回路に接続され通常時閉じたスイッチと、を備え、前記通常時閉じたスイッチは、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された、請求項43または請求項44に記載の無線周波数識別タグアセンブリ。
【請求項47】
無線周波数識別回路と、
前記無線周波数識別回路に接続された通常時閉じたスイッチであって、磁界環境下において前記無線周波数識別回路が電源と電気的に非接続であり、磁界環境外において前記無線周波数識別回路が電源と電気的に接続されるように構成された通常時閉じたスイッチと、
を備えた無線周波数識別タグアセンブリ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図11】
【図12A】
【図12B】
【図12C】
【図12D】
【図12E】
【図13A】
【図13B】
【図14A】
【図14B】
【図15A】
【図15B】
【図16A】
【図16B】
【図16C】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図11】
【図12A】
【図12B】
【図12C】
【図12D】
【図12E】
【図13A】
【図13B】
【図14A】
【図14B】
【図15A】
【図15B】
【図16A】
【図16B】
【図16C】
【公表番号】特表2011−529217(P2011−529217A)
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2011−520009(P2011−520009)
【出願日】平成20年7月23日(2008.7.23)
【国際出願番号】PCT/SG2008/000267
【国際公開番号】WO2010/011176
【国際公開日】平成22年1月28日(2010.1.28)
【出願人】(508122231)キャディ サイエンティフィック プライベート リミテッド (2)
【Fターム(参考)】
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成20年7月23日(2008.7.23)
【国際出願番号】PCT/SG2008/000267
【国際公開番号】WO2010/011176
【国際公開日】平成22年1月28日(2010.1.28)
【出願人】(508122231)キャディ サイエンティフィック プライベート リミテッド (2)
【Fターム(参考)】
[ Back to top ]