
サポーター
【課題】身体の関節部の靭帯や腱を適切に保護及び固定できるサポーターの提供を目的とする。
【解決手段】肘関節部用のサポーター10は、筒状のサポーター本体1と、そのサポーター本体1よりも伸張応力が強い強伸張応力部2と、その強伸張応力部2よりも伸張応力が弱い且つサポーター本体1よりも伸張応力が強い中強伸張応力部7とを備えている。また、強伸張応力部2は、肘関節部の内側側副靭帯を被覆する第1側副靭帯被覆部31と、外側側副靭帯を被覆する第2側副靭帯被覆部32とを有する第1強伸張応力部を備えている。中強伸張応力部7は、第1側副靭帯被覆部31と第2側副靭帯被覆部32との夫々の全周部に、それらと隣接するようにして配設された第1中強伸張応力部71を備えている。
【解決手段】肘関節部用のサポーター10は、筒状のサポーター本体1と、そのサポーター本体1よりも伸張応力が強い強伸張応力部2と、その強伸張応力部2よりも伸張応力が弱い且つサポーター本体1よりも伸張応力が強い中強伸張応力部7とを備えている。また、強伸張応力部2は、肘関節部の内側側副靭帯を被覆する第1側副靭帯被覆部31と、外側側副靭帯を被覆する第2側副靭帯被覆部32とを有する第1強伸張応力部を備えている。中強伸張応力部7は、第1側副靭帯被覆部31と第2側副靭帯被覆部32との夫々の全周部に、それらと隣接するようにして配設された第1中強伸張応力部71を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、身体における関節部に装着されるサポーターに関するものである。
【背景技術】
【0002】
従来から、例えば身体の膝関節部や肘関節部を固定し、支持し、圧迫し、あるいは保温等のためにサポーターが広く用いられている。このようなサポーターとして、例えば特許文献1に提案されたものがある。このサポーターは、筒状に形成した伸縮性素材より成る本体(サポーター本体)の表面の一部に、本体を形成する伸縮性素材の有するモジュラスより大なるモジュラスを有する芯材と、芯材の伸びを制限する表面材とを積層して形成した補強材を接着し、補強材の有するモジュラスは患部の動きを運動域内に制限し得る大きさとしたものである。これにより、筋や靱帯の変化が少ない日常の普通の生活状態では、本体の組織が変化するだけで追随させ、さらに動きの激しいときは、本体のみの変化から補強材の伸縮性が加わって強い応力が作用し、それ以上の筋や靱帯の動きを抑制するようにしたものである。
【特許文献1】特許第2894778号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載のものにおいては、比較的伸びやすい本体から急に伸び難い補強材を配しているため、補強材が膝関節部や肘関節部の動きに対して追随し難い。そのため、例えば膝関節部や肘関節部の靭帯等を保護するサポーターとして用いる場合、補強材で膝関節部や肘関節部の靭帯等を部分的に覆うようにして保護しておいても、例えば膝関節部が動くと補強材が膝関節部(皮膚表面)から浮き上がって膝関節部との間に空隙ができ易く、又、補強材が膝関節部の靭帯からの位置ずれを起こし易い。このような浮き上がりや位置ずれを起こすと、膝関節部近傍を適切に保護及び固定できなくなってしまう。
【0004】
本願発明は、身体の関節部近傍を適切に保護及び固定できるサポーターの提供を目的とする。
【課題を解決するための手段】
【0005】
本願発明は、次の特徴を有するものを提供することにより、上記課題を解決する。本願の請求項1記載の発明は、身体における関節部に装着されるサポーターであって、前記身体の関節部に密着可能なサポーター本体と、そのサポーター本体よりも伸張応力が強い強伸張応力部と、その強伸張応力部よりも伸張応力が弱く且つサポーター本体よりも伸張応力が強い中強伸張応力部とを備え、前記強伸張応力部は、前記身体の関節部における腱と靭帯との少なくとも一方の一部又は全体を覆うことができるように前記サポーター本体の一部に配設された第1強伸張応力部を備え、前記中強伸張応力部は、前記第1強伸張応力部の全周部に配設された第1中強伸張応力部を備えていることを特徴とするサポーターである。
【0006】
請求項2記載の発明は、請求項1に係る前記サポーター本体は、外筒状体と、その外筒状体の内周側に配設された内筒状体とを有する筒状体から構成され、前記第1強伸張応力部と第1中強伸張応力部とは、夫々、前記外筒状体と内筒状体との間に介在物を介在させるようにして構成され、前記介在物は、前記外筒状体と内筒状体とに夫々接着されていることを特徴とするサポーターである。
【0007】
請求項3記載の発明は、請求項2に係る前記介在物は、複数の合成樹脂片から構成され、前記第1強伸張応力部と第1中強伸張応力部とは、夫々、複数の合成樹脂片が点在されているとともに、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されていることを特徴とするサポーターである。
【発明の効果】
【0008】
本願発明の請求項1によれば、第1強伸張応力部の全周部に第1中強伸張応力部を配設しているため、サポーター本体から第1強伸張応力部にかけて徐々に伸張応力を強くできる。これにより、第1強伸張応力部を、関節部の動きに追随させ易いものにでき、その装着した関節部を動かした場合でも、第1強伸張応力部がその関節部から浮き上がり難いものにでき、関節部との間に隙間ができ難いものにできる。又、装着後に第1強伸張応力部が関節部の靭帯等からの位置ずれを起こし難いものにできる。従って、第1強伸張応力部で身体の関節部における靭帯や腱を覆うようにすれば靭帯や腱を適切に保護及び固定できる。
【0009】
請求項2によれば、サポーター本体は、外筒状体と内筒状体とを有する筒状体から構成される。又、第1強伸張応力部と第1中強伸張応力部とは、夫々、外筒状体と内筒状体との間に介在物を介在させるようにして構成される。そして、介在物は、外筒状体と内筒状体とに夫々接着されている。
【0010】
これにより、第1強伸張応力部と第1中強伸張応力部との引っ張り抵抗を、介在物の介在によって増大させることができ、サポーター本体よりも伸張応力の強いものにできる。
【0011】
又、外筒状体と内筒状体との間に介在物を介在させているため、使用中に介在物が他のものに当たるようなことを防止できる。従って、例えば使用や取り扱いに際して介在物が脱落し、或いは、長期間の使用によって介在物が擦り減って第1強伸張応力部や第1中強伸張応力部の伸張応力が変わるようなことを防止できる。
【0012】
請求項3によれば、介在物は、複数の合成樹脂片から構成される。そして、第1強伸張応力部と第1中強伸張応力部とは、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されている。
【0013】
これにより、伸張応力がサポーター本体よりも強い第1強伸張応力部と、伸張応力が第1強伸張応力部よりも弱く且つサポーター本体よりも強い第1中強伸張応力部とを、容易に形成できるとともに、第1中強伸張応力部を、第1強伸張応力部の全周部に容易に形成できる。
【0014】
又、面積比を変えることにより、サポーター本体と第1強伸張応力部と第1中強伸張応力部との3者間における伸張応力の強弱の程度を容易に調整できる。
【発明を実施するための最良の形態】
【0015】
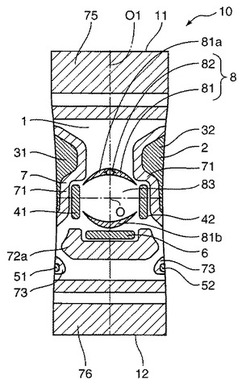
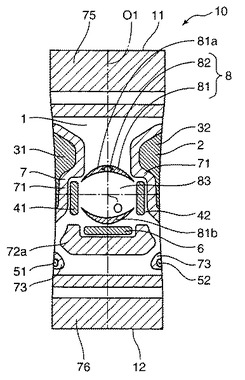
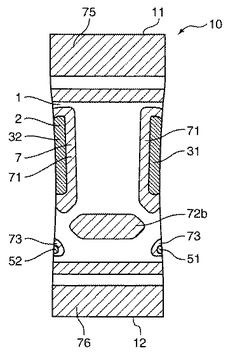
以下、本願発明を実施するための最良の形態について、図面を参照しながら詳細に説明する。図1は、第1実施形態のサポーターの正面図、図2は、図1のサポーターの背面図、図3は、図1のサポーターの平面図である。
【0016】
第1実施形態のサポーター10は、身体の肘関節部に装着されて使用される肘関節用のものとされている。この肘関節用のサポーター10は、サポーター本体1と、そのサポーター本体1よりも伸張応力が強い強伸張応力部2と、その強伸張応力部2よりも伸張応力が弱く且つサポーター本体1強伸張応力部2よりも伸張応力が強い中強伸張応力部7とを備えている。
【0017】
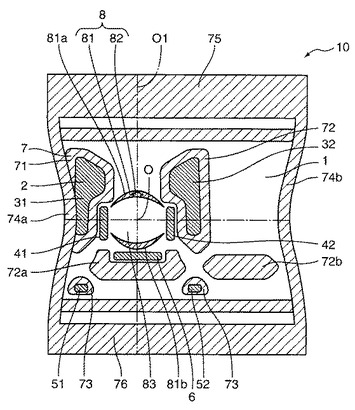
サポーター本体1は、強伸張応力部2及び中強伸張応力部7に対して伸張応力の弱い弱伸張応力部を構成するもので、この実施形態では、前後両面及び左右両面を有する筒状体から構成されている。又、この実施形態のサポーター本体1は、変形自在なシート状の外筒状体1aと、その外筒状体1aの内周側に配設された変形自在なシート状の内筒状体1bとの内外2層のものから構成されている(図6参照)。
【0018】
これらの外筒状体1aと内筒状体1bとは、同一構成を採っており、夫々は、ナイロン糸とポリウレタン糸との2種類を少なくとも含む糸で、トリコット編みされた生地によって構成されている。
【0019】
又、図1〜図3に示すように、このサポーター本体1は、軸方向の一端側である上端側に腕を入れる腕入れ口11を、軸方向の他端側である下端側に腕を出す腕出し口12を、夫々、有する。また、サポーター本体1は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、肘関節部に密着できるようになっている。
【0020】
強伸張応力部2は、この実施形態では、第1強伸張応力部31、32〜第4強伸張応力部6を備えている。第1強伸張応力部31、32は、サポーター本体1の左側面に配設された第1側副靭帯被覆部31と、サポーター本体1の右側面に、第1側副靭帯被覆部31と周方向に距離を隔てて分離するようにして配設された第2側副靭帯被覆部32との一対の副靭帯被覆部を備えている。
【0021】
これらの第1側副靭帯被覆部31と第2側副靭帯被覆部32とのいずれか一方は、肘関節部の内側側副靭帯(図示せず)を覆って保護し、いずれか他方は、肘関節部の外側側副靭帯(図示せず)を覆って保護する。例えば右腕の肘関節部に装着させて使用する場合は、第1側副靭帯被覆部31が外側側副靭帯を覆って保護し、第2側副靭帯被覆部32が内側側副靭帯を覆って保護する。
【0022】
第1側副靭帯被覆部31と第2側副靭帯被覆部32とは、サポーター本体1の左右中心線O1に対して左右対称になるように配設されており、同一構成を採っている。以下、第1側副靭帯被覆部31についてのみ説明する。
【0023】
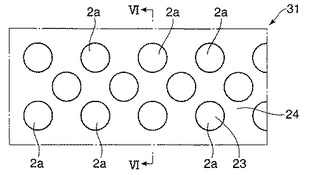
第1側副靭帯被覆部31は、この実施形態では、サポーター本体1の一部における外筒状体1aと内筒状体1bとの間に、複数の介在物を点在させようにして形成されている。
【0024】
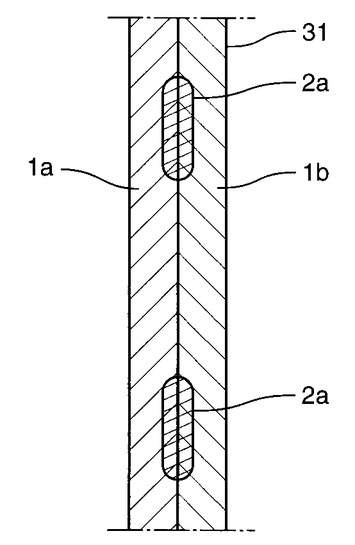
詳しくは、この実施形態では、介在物として、サポーター本体1の伸張応力よりも強い伸張応力を有する合成樹脂片、例えばウレタン系樹脂片2aが用いられている。そして、図5に示すように、このウレタン系樹脂片2aは、直径2mm程度の大きさで、第1側副靭帯被覆部31を区画する領域内に点在されている。
【0025】
また、ウレタン系樹脂片2aは、第1側副靭帯被覆部31におけるウレタン系樹脂片2aを点在させた点在部23とウレタン系樹脂片2aを点在させていない非点在部24との面積比が1:1程度になるように点在されている。
【0026】
そして、このように配設されたウレタン系樹脂片2aは、図6に示すようにサポーター本体1の外筒状体1aと内筒状体1bとに夫々、接着されている。これにより、第1側副靭帯被覆部31は、ウレタン系樹脂片2aの介在によって、サポーター本体1よりも伸張応力が強いものに形成されている。又、ウレタン系樹脂片2aが外筒状体1aと内筒状体1bとに接着されることによって、サポーター本体1の外筒状体1aと内筒状体1bとが互いに移動できないようになっている。
【0027】
尚、このように構成された第1強伸張応力部の第1側副靭帯被覆部31及び第2側副靭帯被覆部32は、実際にはサポーター本体1の外筒状体1aの表面に現われ難く、外観上、目視で判別し難い状態になっているが、説明の都合上、図1、図2、図4及び図8では、第1強伸張応力部の第1側副靭帯被覆部31及び第2側副靭帯被覆部32の領域を斜線で表示している。後述の第2強伸張応力部41、42や中強伸張応力部7において同じである。
【0028】
又、上記図1、図2、図4及び図8では、強伸張応力部2における第1強伸張応力部31、32〜第4強伸張応力部6を、夫々、同じ斜線で表示し、中強伸張応力部7における後述の第1中強伸張応力部71〜第6中強伸張応力部76を、夫々、同じ斜線で表示している。更に、後述の第2実施形態における図10、図11、図13、図14、後述の第3実施形態における図16、図17、図19、図20においても同じように表している。
【0029】
次に、第2強伸張応力部41、42について説明する。この第2強伸張応力部41、42は、図1、図4に示すように第1側副靭帯被覆部31と第2側副靭帯被覆部32との間における第1側副靭帯被覆部31の右側近傍に配設された第1側副靭帯被覆補助部41と、上記間における第2側副靭帯被覆部32の左側近傍に配設された第2側副靭帯被覆補助部42とを備えている。
【0030】
第1側副靭帯被覆補助部41は、主として第1側副靭帯被覆部31の肘関節部からの浮き上がりや位置ずれを起こし難いように補助する。第2側副靭帯被覆補助部42は、主として第2側副靭帯被覆部32の肘関節部からの浮き上がりや位置ずれを起こし難いように補助する。
【0031】
これらの第1側副靭帯被覆補助部41と第2側副靭帯被覆補助部42とは、夫々、サポーター本体1の軸方向に所定長さで延ばされた帯状のものから構成され、サポーター本体1の左右中心線O1に対して左右対称になるように配設されている。
【0032】
第3強伸張応力部51、52は、第1小片51と、第1小片51と左右一対をなす第2小片52とを備えている。第1小片51は、上記第1側副靭帯被覆部31からサポーター本体1の軸方向における腕出し口12側に所定距離だけ隔てた位置に配設されている。これにより、第1小片51によって、第1側副靭帯被覆部31の肘関節部から浮き上がりや位置ずれを、より起こし難いようにしている。
【0033】
第2小片52は、上記第2側副靭帯被覆部32から上記軸方向における腕出し口12側に所定距離だけ隔てた位置に配設されている。これにより、第2小片52によって、第2側副靭帯被覆部32の肘関節部から浮き上がりや位置ずれを、より起こし難いようにしている。
【0034】
第4強伸張応力部6は、長尺状の帯状のものから構成されており、サポーター本体1の軸方向及び周方向における第1強伸張応力部31、32と第3強伸張応力部51、52との間に、長手方向がその周方向に所定の長さで延ばされている。
【0035】
また、この第4強伸張応力部6は、後述の肘頭被覆部83の中心Oからの距離がその中心Oから上記第1側副靭帯被覆補助部41までの距離及び上記第2側副靭帯被覆補助部42までの距離とほぼ同一となる位置に配設されている。
【0036】
このように構成された第4強伸張応力部6は、第1側副靭帯被覆部31及び第2側副靭帯被覆部32の肘関節部からの浮き上がりや位置ずれを、より一層起こし難いようにする。
【0037】
尚、これらの第2強伸張応力部41、42、第3強伸張応力部51、52及び第4強伸張応力部6は、上記第1強伸張応力部31、32と同一構成を採っている(図5、図6参照)。
【0038】
次に、中強伸張応力部7について説明する。中強伸張応力部7は、この実施形態では、第1中強伸張応力部71〜第6中強伸張応力部76を備えている。
【0039】
第1中強伸張応力部71は、第1強伸張応力部31、32の肘関節部からの浮き上がり、及び位置ずれを抑えるとともに、肘関節部の内側側副靭帯や外側側副靭帯を第1強伸張応力部31、32と共に保護する。
【0040】
この第1中強伸張応力部71は、第1強伸張応力部の第1側副靭帯被覆部31と第2側副靭帯被覆部32との夫々の全周部に、それら夫々と距離を隔てないように隣接して所定幅で配設されている。
【0041】
また、この実施形態では、第1中強伸張応力部71は、図7に示すように第1強伸張応力部31、32と、ほぼ同様にして構成されている。詳しくは、第1中強伸張応力部71は、サポーター本体1の第1側副靭帯被覆部31の全周部及び第2側副靭帯被覆部32の全周部に夫々、外筒状体1aと内筒状体1bとの間に合成樹脂片としてのウレタン系樹脂片2aを配設することよって形成されている。
【0042】
ただし、この第1中強伸張応力部71におけるウレタン系樹脂片2aは、ウレタン系樹脂片2aを点在させた点在部23と、ウレタン系樹脂片2aを点在させていない非点在部24との面積比が3:7程度になるように点在されている。
【0043】
このようにして、第1中強伸張応力部71における上記点在部23の非点在部24に対する面積比を、上記第1強伸張応力部31、32におけるその面積比よりも小さくすることにより、第1中強伸張応力部71の伸張応力を、サポーター本体1よりも強いが、第1強伸張応力部31、32の伸張応力よりも弱いものにしている。
【0044】
第2中強伸張応力部72a、72bは、第1強伸張応力部31、32の肘関節部からの浮き上がり、及び位置ずれを抑えるとともに、肘関節部の前腕筋群を保護する。この実施形態の第2中強伸張応力部72a、72bは、図1、図2及び図4に示すように、第1前腕筋被覆部72aと、第2前腕筋被覆部72bとの2つを備えている。
【0045】
第1前腕筋被覆部72aは、サポーター本体1の前面における第1強伸張応力部31、32よりも軸方向の腕出し口12側寄りの位置であって、肘関節部の前腕筋群の尺側手根伸筋や橈側手根伸筋の一部を被覆できる位置に配設されている。
【0046】
第2前腕筋被覆部72bは、サポーター本体1の後面における第1強伸張応力部31、32よりも軸方向の腕出し口12側寄りの位置であって、肘関節部の前腕筋群の尺側手根屈筋や橈側手根屈筋の一部を被覆できる位置に配設されている。
【0047】
第3中強伸張応力部73は、上記第3強伸張応力部の第1小片51と第2小片52との夫々の全周部に配設され、第3強伸張応力部51、52の肘関節部からの浮き上がり及び位置ずれを抑える。
【0048】
第4中強伸張応力部74a、74bは、縫製部を構成するもので、展開した状態における図4に示すサポーター本体1の左右両端夫々に配設された左端片74aと右端片74bとを備えている。
【0049】
尚、この実施形態の左端片74aの一部は、上記第1中強伸張応力部71の一部を兼備している。
【0050】
第5中強伸張応力部75と第6中強伸張応力部76は、装着後に肘関節部からのずれ落ち防止のためのもので、第5中強伸張応力部75は、サポーター本体1の軸方向における腕入れ口11側に、サポーター本体1の周方向の全周に渡って配設されている。
【0051】
一方、第6中強伸張応力部76は、サポーター本体1の軸方向における腕出し口12側に、サポーター本体1の周方向の全周に渡って配設されている。
【0052】
尚、上記第2中強伸張応力部72a、72b〜第6中強伸張応力部76は、第1中強伸張応力部71と同様にして形成されている(図7参照)。
【0053】
又、この実施形態では、サポーター本体1の前面における第1側副靭帯被覆部31と第2側副靭帯被覆部32と間に、上記靭帯に対する第1側副靭帯被覆部31及び第2側副靭帯被覆部32の位置決めをするための位置決め部8が設けられている。
【0054】
この実施形態の位置決め部8は、サポーター本体1の外筒状体1aの表面に表示された肘頭被覆部形成手段としての肘頭区画表示部81と、その肘頭区画表示部81に表示された左右中央点明示部82とから構成されている。
【0055】
肘頭区画表示部81は、2つの湾曲表示片81a、81bを備え、それらが、上部と下部に対向するように配設され、これにより、それらの内側に肘部の肘頭を覆うほぼ円形状の肘頭被覆部83を、外観上、使用者に認識できるように区画形成している。この肘頭被覆部83は、その中心Oが上記左右中央線O1上にくるように構成されている。
【0056】
又、左右中央点明示部82は、上記肘頭被覆部83の左右中心を明示したもので、肘頭区画表示部81における上部の湾曲表示片81aの内部に、その湾曲表示片81aと上記左右中央線O1とが交わる位置に配設されている。
【0057】
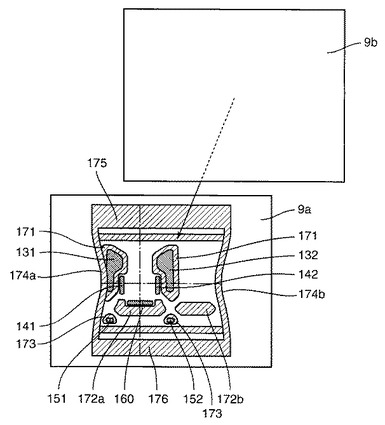
次に、この肘用サポーターの製造方法について説明する。まず、ナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して、図8に示すように2枚の長方形状のシート体9a、9bを製作する。
【0058】
そして、その内の一方のシート体9aの表面に、ウレタン系樹脂をスクリーン印刷によって塗布することによりウレタン系樹脂片2aを点在させる。
【0059】
これにより、第1強伸張応力領域部131、132、第2強伸張応力領域部141、142、第3強伸張応力領域部151、152、第4強伸張応力領域部160が形成される。また、同時に、第1中強伸張応力領域部171、第2中強伸張応力領域部172a、172b、第3中強伸張応力領域部173、第4中強伸張応力領域部174a、174b、第5中強伸張応力領域部175、及び第6中強伸張応力領域部176が形成される。
【0060】
そして、その他方のシート体9bを、その一方のシート体9aの表面に重ね合わせる。そして、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかけるようにして接着させる。
【0061】
これにより、第1強伸張応力領域部131、132〜第4強伸張応力領域部160のウレタン系樹脂片2a及び第1中強伸張応力領域部171〜第6中強伸張応力領域部176のウレタン系樹脂片2aと、シート体9a、9b夫々とが接着する。
【0062】
この状態で、2枚のシート体9a、9bでサポーター本体1が形成されるとともに、第1強伸張応力領域部131、132〜第4強伸張応力領域部160の夫々に、サポーター本体1よりも伸張応力が強い第1強伸張応力部31、32〜第4強伸張応力部6が形成される。又、同時に、第1中強伸張応力領域部171〜第6中強伸張応力領域部176夫々に、サポーター本体1よりも伸張応力が強く、且つ、上記第1強伸張応力部31、32〜第4強伸張応力部6よりも伸張応力が弱い第1中強伸張応力部71〜第6中強伸張応力部76が形成される。
【0063】
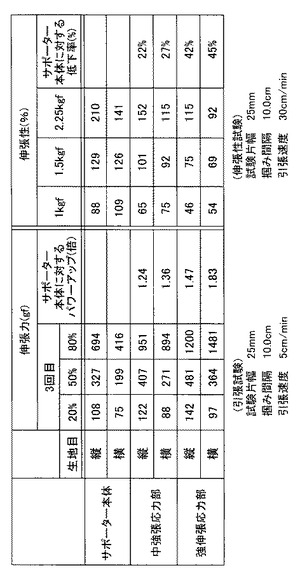
ここで、サポーター本体、強伸張応力部、中強伸張応力部夫々の引っ張り試験を行ったので、その測定データを図9に示す。この試験は、サポーター本体、強伸張応力部、中強伸張応力部夫々について、試験片を、縦方向(軸方向)及び横方向(周方向)に夫々、20%、50%、80%だけ伸ばした際の伸張力(gf)を取得して比較した。又、試験片として試験片幅25mmのものを用い、掴み間隔10.0cmで、引張速度5cm/minの条件で測定行った。
【0064】
その結果、強伸張応力部が最も大きい伸張力を要し、次いで中強伸張応力部で、サポーター本体が最も小さい伸張力で伸びた。すなわち、強伸張応力部が最も伸張応力が強く、次いで中強伸張応力部で、サポーター本体が最も伸張応力が弱いものであった。
【0065】
尚、上記引っ張り試験と共に、伸張性の試験も行ったので、その結果も併せて図9に表示した。この伸張性の試験は、各試験片について、1kgf、1.5kgf、2.25kgf夫々の伸張力での伸び率を調べることにより行われた。このときの引張速度は、30cm/minの条件で測定した。
【0066】
図8に戻り、説明を続けると、上述のように2枚のシート体9a、9bでサポーター本体1を形成した後、外周縁部を裁断する。これにより、図4に示す展開状態の肘関節用のサポーターが得られる。
【0067】
その後、図4に示すように上記他方のシート体9bから構成された外筒状体1aの表面に、位置決め部8を、塗料インク等の塗料を塗布することによって形成する。そして、例えばそのサポーター本体1の左右両端に設けられた右端片74bを後方側に回して左端片74aを重ね合わせて両者を縫い着ける。尚、図2では、縫い着けた後の逢着部は表していない。
【0068】
次に、この肘関節用のサポーターの動作について説明する。この肘関節用のサポーターを、例えば右腕の肘関節部に装着する場合は、肘関節用のサポーターの前面側を後側になるように前後逆にして、その状態で、腕入れ口11から腕を通していく。
【0069】
その際、強伸張応力部2を、サポーター本体1の周方向に間隔を隔てて配設しているため、例えば第1側副靭帯被覆部31と第2側副靭帯被覆部32とを連続的に全周に設けた場合に比べて拡径し易く、容易に腕を通すことができる。
【0070】
そして、位置決め部8の肘頭区画表示部81によって区画した肘頭被覆部83で肘頭を覆うようにするとともに、左右中央点明示部82を肘頭のほぼ左右中央に目視によって位置合わせする。
【0071】
これにより、例えば、第1側副靭帯被覆部31が外側側副靭帯を、第2側副靭帯被覆部32が外側側副靭帯を、夫々被覆する。また、第1前腕筋被覆部72aが尺側手根伸筋や橈側手根伸筋の一部を被覆し、第2前腕筋被覆部72bが尺側手根屈筋や橈側手根屈筋の一部を被覆する。
【0072】
従って、肘関節部への着用に際し、例えば使用者が肘関節部の内側側副靭帯や外側側副靭帯の位置を知らない場合、或いは、見難い第1側副靭帯被覆部31、第2側副靭帯被覆部32及び第1前腕筋被覆部72aを、誰でも容易に肘関節部の所定位置に配設でき、上記靭帯や筋を確実に保護及び固定できる。
【0073】
この状態から、例えば肘関節部を曲げ又は伸ばすように動かすと、第1側副靭帯被覆部31及び第2側副靭帯被覆部32が肘関節部の靭帯を覆っているため、靭帯の伸びを抑えるができ、靭帯を保護できる。
【0074】
又、その際、第1強伸張応力部31、32の全周部に配した第1中強伸張応力部71によって、第1強伸張応力部31、32が肘関節部から浮き上がって肘関節部との間に隙間ができるのを抑え、あるいは、靭帯からの位置ずれを抑えることができる。
【0075】
また、第1側副靭帯被覆部31と第2側副靭帯被覆部32とを間隔を隔てて配設しているため、第1側副靭帯被覆部31と第2側副靭帯被覆部32とが肘関節部の動きに追随し、肘関節部を円滑に動かすことができるとともに、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、或いは肘関節部の靭帯からの位置ずれを、より確実に抑えることができる。
【0076】
また、第2強伸張応力部41、42によって、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、あるいは、靭帯からの位置ずれを、より一層確実に抑えることができるとともに、肘関節部の動きに追随する際の第1側副靭帯被覆部31と第2側副靭帯被覆部32とのつっぱり感を解消し、装着した際の違和感を無くすことができる。
【0077】
さらには、第2中強伸張応力部72a、72bによって、第1側副靭帯被覆部31と第2側副靭帯被覆部32とを、常時周方向の両側から引き寄せ、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、あるいは、靭帯からの位置ずれを抑えることができる。
【0078】
また、仮に第1側副靭帯被覆部31と第2側副靭帯被覆部32とが靭帯から多少の位置ずれを起こした場合でも、第1中強伸張応力部71によって上記靭帯を覆うことができ、効率的に靭帯を保護できる。
【0079】
尚、上記第1実施形態では、第2強伸張応力部41、42〜第4強伸張応力部6、及び、第2中強伸張応力部72a、72b〜第6中強伸張応力部76を設けているが、この形態のものに限らず、適宜変更できる。
【0080】
例えば、第2強伸張応力部41、42〜第4強伸張応力部6、及び、第2中強伸張応力部72a、72b〜第6中強伸張応力部76の内の1又は複数或いは全部を設けないものとする。あるいは、第2強伸張応力部41、42〜第4強伸張応力部6内の1又は複数或いは全部に代えて中強伸張応力部を設けるようにし、又は、第2中強伸張応力部72a、72b〜第6中強伸張応力部76の内の1又は複数或いは全部に代えて強伸張応力部を設けるようにしてもよい。
【0081】
次に、本発明の第2実施形態について、説明する。第2実施形態のものは、身体の膝関節部に装着されて使用される膝関節部用のものとして実施されている。
【0082】
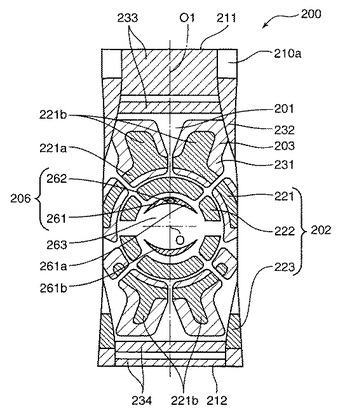
この第2実施形態の膝関節部用のサポーター200は、図10〜図13に示すように、サポーター本体201と、強伸張応力部202と、中強伸張応力部203とを備えている。
【0083】
サポーター本体201は、先の第1実施形態のサポーター本体201と同様に、外筒状体と内筒状体との内外2層から構成されている(図6参照)。又、外筒状体1aと内筒状体1bとは、先の第1実施形態のものと同一構成を採っている。
【0084】
又、この実施形態では、サポーター本体201の後面側における軸方向の一端側である上端側に、サポーター本体201よりも伸張応力の強い帯状の平ゴム部210aが設けられている。平ゴム部210aは、サポーター本体201よりも伸張応力が強く構成されており、これにより、装着されたサポーター本体201が膝部からずり下がり難いようにされている。
【0085】
又、このサポーター本体201は、その上端側に脚を入れる脚入れ口211を、下端側に脚を出す脚出し口212を、夫々、有する。また、サポーター本体201は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、膝関節部に密着できるようになっている。
【0086】
強伸張応力部202は、この実施形態では、第1強伸張応力部221と、第2強伸張応力部222と、第3強伸張応力部223を備えている。
【0087】
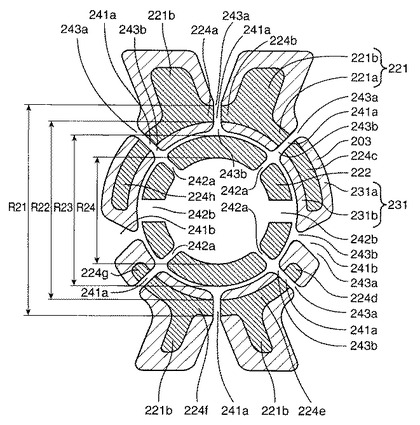
第1強伸張応力部221は、この実施形態では、図10、図13に示すように、リング状部221aと、リング状部221aから外周側に突設された突片221bとを備えたものから構成されている。
【0088】
また、第1強伸張応力部221は、そのリング状部221aの中心Oがサポーター本体1の前面における左右中心線O1上にくるようにして、サポーター本体201の前面から左右の両側面にかけて配設されている。
【0089】
リング状部221aは、その内周側に膝関節部の膝蓋骨が入る程度の大きさとされ、これにより、第1強伸張応力部221が図15に示す膝関節部300の膝蓋骨303の周部のほぼ全体を被覆できるように構成されている。より具体的には、この実施形態のリング状部221aは、図13に示すように、外径R21が120mm程度で、内径R22が100mm程度のものとされている。
【0090】
又、このリング状部221aには、周方向に複数の第1強伸張応力分断部241a、241bが設けられている。この実施形態の第1強伸張応力分断部241a、241bは、上記サポーター本体201によって構成されており、6つの幅狭分断部241aと、それらの幅狭分断部241aよりも幅の広い2つの幅広分断部241bとから構成されている。
【0091】
そして、これらの第1強伸張応力分断部241a、241bによってリング状部221aは、第1強伸張応力構成片224a〜第8強伸張応力構成片224hの8つの円弧状の小片に分断されている。
【0092】
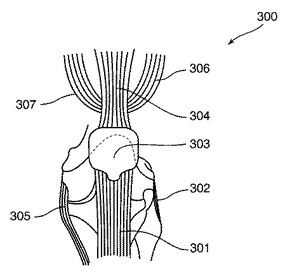
リング状部221aにおける図13の上部側の左右一対の第1強伸張応力構成片224aと第2強伸張応力構成片224bとは、主として、図15に示す膝関節部300の四頭筋腱304を覆って保護する四頭筋腱被覆部を構成している。
【0093】
又、リング状部221aにおける図13の下部側の左右一対の第5強伸張応力構成片224eと第6強伸張応力構成片224fとは、主として、図15に示す膝関節部300の膝蓋腱301(膝蓋靭帯)を覆って保護する膝蓋腱被覆部を構成している。
【0094】
また、リング状部221aにおける図13の中央部側の第3強伸張応力構成片224c、第4強伸張応力構成片224d、第7強伸張応力構成片224g及び第3強伸張応力構成片224hは、主として、図15に示す膝関節部300の内側側副靭帯302と外側側副靭帯305との夫々を覆って保護する側副靭帯被覆部を構成している。
【0095】
突片221bは、上記第1強伸張応力構成片224a、第2強伸張応力構成片224b、第5強伸張応力構成片224e、及び第6強伸張応力構成片224fの夫々から外周側(径外側)に突設されている。そして、例えば第1強伸張応力構成片224a、第2強伸張応力構成片224b夫々に設けられた突片221bは、図15に示す膝関節部300の大腿四頭筋の一部をなす内側広筋306や外側広筋307を覆って保護する大腿四頭筋被覆部として機能する。
【0096】
このように構成された第1強伸張応力構成片224a〜第8強伸張応力構成片224g、及び突片221bは、先の第1実施形態の第1強伸張応力部31、32と同構成を採っている(図6、図7参照)。
【0097】
次に、第2実施形態における強伸張応力部202の第2強伸張応力部222について説明する。この第2強伸張応力部222は、図10、図14に示すように第1強伸張応力部221の内周側に配設されている。この実施形態における第2強伸張応力部222は、上記第1強伸張応力部221の中心Oを中心にして、図15に示す膝関節部300の膝蓋骨303の外周径と同程度の大きさ(装着時)の内径R24を有するリング状のものから構成されている。より具体的には、第2強伸張応力部22は、外径R23が87mm程度、内径R24が60mm程度の大きさのとされている。
【0098】
又、この第2強伸張応力部222には、複数の第2強伸張応力分断部242a、242bが設けられている。これらの第2強伸張応力分断部242a、242bは、上記第1強伸張応力分断部241a、241bと同様に、幅狭分断部242aと、その幅狭分断部242aよりも幅の広い幅広分断部242bとから構成されている。
【0099】
幅狭分断部242aは、4つから構成されており、上記第1強伸張応力分断部の幅狭分断部241aよりも数が2つだけ少ない。そして、これらの幅狭分断部242aは、上記第1強伸張応力分断部の幅狭分断部241aの内の4つのものと同じ幅で、同じ周方向の位置に配設されている。従って、上記第1強伸張応力分断部の幅狭分断部241aにおける他の2つの幅狭分断部241aの内周側には、第2強伸張応力部222が配設された状態になっている。
【0100】
一方、幅広分断部242bは、2つから構成されており、上記第1強伸張応力分断部の幅広分断部241bと同じ数からなる。ただし、上記幅広分断部241bよりも幅が狭く、周方向の位置が異なるように配設されている。従って、上記幅広分断部241bの一部の内周側にも、第2強伸張応力部222が配設された状態になっている。
【0101】
このようにして、第1強伸張応力分断部の一部の内周側に、第2強伸張応力部222が配設されることにより、第1強伸張応力部221の内周側を膝関節部300(図15参照)に押さえた状態にするとともに、膝関節部300の動きに伴う第1強伸張応力分断部241a、241bの変形を第2強伸張応力部222によって規制し、例えば第1強伸張応力部221の径が大きくなり過ぎないように規制している。
【0102】
尚、これらの第2強伸張応力分断部242a、242bによって第2強伸張応力部222が周方向に複数の構成片に分断されている。また、第2強伸張応力部222を構成した複数の構成片は、上記第1強伸張応力部221を構成した第1強伸張応力構成片224a〜第8強伸張応力構成片224g及び突片221bと同様に形成され、同一構造を有する(図5、図6参照)。後述の第3強伸張応力部223も同様である。
【0103】
又、この第2強伸張応力部222の内周側に、膝関節部100の腱や靭帯に対する第1強伸張応力部221の位置決めするための位置決め部206が設けられている。この位置決め部206は、先の第1実施形態の位置決め部8と同様に、膝蓋骨区画表示部261と左右中央点明示部262とを備えている。
【0104】
詳しくは、この実施形態では、膝蓋骨区画表示部261は、2つの湾曲表示片261a、261bを備え、それらによって、上記第1強伸張応力部221の中心Oを中心としたほぼリング状の膝蓋骨被覆部263が、外観上、使用者に認識できるように区画形成されている。又、膝蓋骨被覆部263は、その外径が、膝蓋骨303の外径とほぼ同程度の大きさのものからなる。
【0105】
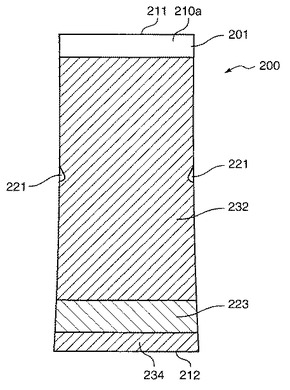
次に、強伸張応力部202の第3強伸張応力部223について説明する。この第3強伸張応力部223は、主に、膝関節部300への装着後において、サポーター本体201のずり上がりを防止するためのもので、図11に示すように、サポーター本体1の後面側における軸方向の脚出し口212側寄りの位置に、帯状に配設されている。
【0106】
次に、第2実施形態における中強伸張応力部203について説明する。中強伸張応力部203は、図10、図11、図14に示すように、この実施形態では、第1中強伸張応力部231〜第4中強伸張応力部234を備えている。第1中強伸張応力部231は、第1強伸張応力部221の膝関節部からの浮き上がり、及び位置ずれを抑えるとともに、膝関節部300の腱や靭帯を保護する。
【0107】
この実施形態における第1中強伸張応力部231は、外周隣接部231aと、内周隣接部231bとを有している。外周隣接部231aは、第1強伸張応力部221の外周側に第1強伸張応力部221と距離を隔てないように隣接させるようにして配設されている。内周隣接部231bは、第1強伸張応力部221の内周側に第1強伸張応力部221と距離を隔てないように隣接させるようにして配設されている。
【0108】
又、外周隣接部231aには、外周隣接部用分断部243aが設けられ、内周隣接部231bには、内周隣接部用分断部243bが設けられており、これらの外周隣接部用分断部243a、内周隣接部用分断部243bによって外周隣接部231aと内周隣接部231bとが、夫々、複数の隣接部小片に分断されている。
【0109】
外周隣接部用分断部243aと内周隣接部用分断部243bとは、上記第1強伸張応力部221を分断した幅狭分断部241a及び幅広分断部241bの夫々と連結されている。
【0110】
詳しくは、上記幅狭分断部241aは、その径外側に外周隣接部用分断部243aが連結され、その径内側に内周隣接部用分断部243bが連結されている。これにより、幅狭分断部241aと外周隣接部用分断部243aと内周隣接部用分断部243bとで、1つの連続したスリット状の分断部が形成されている。
【0111】
また、上記幅広分断部241bは、その径外側に外周隣接部用分断部243aが連結され、その径内側に内周隣接部用分断部243bが連結されている。尚、この実施形態では、幅広分断部241bにおいて、外周隣接部231aが内周隣接部231bにまで延ばされて内周隣接部231bに連結されている。
【0112】
これらの外周隣接部231aと内周隣接部231bとは、先の第1実施形態の第1中強伸張応力部71と同構成を採っている(図6、図7参照)。以下の第2実施形態における第3中強伸張応力部233、第4中強伸張応力部234においても同じである。
【0113】
次に、第2実施形態の第2中強伸張応力部232について説明する。第2中強伸張応力部232は、サポーター本体201の後面側における第1強伸張応力部221及び第2強伸張応力部222の周方向側に配設されている。
【0114】
又、第2実施形態における第3中強伸張応力部233と第4中強伸張応力部234とは、装着後における主に軸方向のずれ防止のためのもので、第3中強伸張応力部233は、サポーター本体201のほぼ前面における軸方向の脚入れ口211側に配設されている。一方、第4中強伸張応力部234は、サポーター本体201の軸方向における脚出し口212側に、全周に渡って配設されている。
【0115】
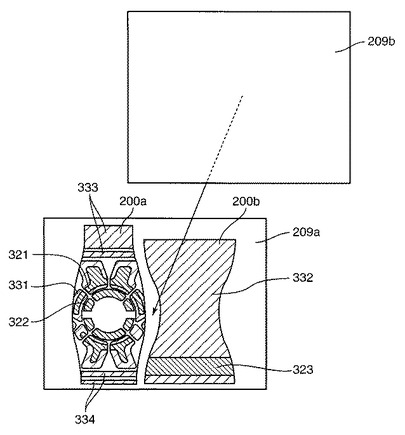
このように構成された第2実施形態の膝関節部用のサポーター200は、先の第1実施形態の肘関節用のサポーター10とほぼ同様にして製造される。即ち、図14に示すように、ナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して、図14に示すように2枚のシート体209a、209bを形成する。
【0116】
そして、その内の一方のシート体209aの表面に、スクリーン印刷によって、ウレタン系樹脂片を点在させ、第1強伸張応力領域部321、第2強伸張応力領域部322、第3強伸張応力領域部323、第1中強伸張応力領域部331、第2中強伸張応力領域部332、第3中強伸張応力領域部333及び第4中強伸張応力領域部334を形成する。
【0117】
次に、他方のシート体209bを、その一方のシート体209aの表面に重ね合わせる。そして、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかけるようにして接着させる。
【0118】
その後、先の第1実施形態と同様に、外周縁部を裁断する。ただし、この実施形態では、サポーターの前面を構成する前片200aと、サポーターの後面を構成する後片200bとの2枚に裁断する。
【0119】
そして、その前片200aと後片200bとの左右両端同士を重ね合わせて両者を縫い着けてサポーター本体201を形成するとともに、そのサポーター本体201に、予め準備した平ゴム部210a(図11に図示)を縫い着ける。これにより、第2実施形態の膝関節部用のサポーター200を得ることができる。
【0120】
次に、この膝関節部用のサポーター200の動作について説明する。この膝関節部用のサポーター200を、身体の膝関節部に装着する場合は、膝関節部用のサポーター200の位置決め部206を前方側にして脚入れ口211から脚を通していく。その際、第1強伸張応力部221及び第2強伸張応力部222が前面側から左右の側面にかけての部分に配設されその後面側に第2中強伸張応力部232が配設されているため、例えば強伸張応力部を全周に設けた場合に比べて拡径し易く、容易に脚を通すことができる。
【0121】
そして、位置決め部206の膝蓋骨区画表示部261によって形成された膝蓋骨被覆部263を目視によって膝関節部300の膝蓋骨301(図15参照)にほぼ一致させるとともに、左右中央点明示部262を膝蓋骨のほぼ左右中央に目視によって位置合わせする。これにより、強伸張応力部221〜223及び中強伸張応力部231〜234を膝関節部の所定位置に配設でき、例えば、第1強伸張応力部221が、膝蓋腱301、内側側副靭帯302、外側側副靭帯303、四頭筋腱304、大腿四頭筋の外側広筋及び内側広筋等を覆った状態にできる。
【0122】
従って、強伸張応力部及び中強伸張応力部が外観上、見難い場合でも、それらを容易に膝関節部の所定位置に配設でき、使用し易いものにできると共に、膝部の腱や靭帯を覆う位置に配設できる。
【0123】
この状態から膝関節部を動かすと、第1強伸張応力部221が膝関節部の主要な腱や靭帯を覆っているため、膝部の腱や靭帯を適切に保護および固定でき、例えば膝関節部に過度の力がかかったような場合でも、腱や靭帯の過度の伸びを抑えるができ、腱や靭帯を痛めるおそれの少ないものにできる。
【0124】
又、その際、第1強伸張応力部221の全周部に配した第1中強伸張応力部231によって、第1強伸張応力部221が膝関節部から浮き上がって膝関節部との間に空隙ができ、あるいは、腱や靭帯からの位置ずれを抑えることができる。
【0125】
また、第1強伸張応力部221及び第1中強伸張応力部231に分断部が設けられているため、第1強伸張応力部221及び第1中強伸張応力部231が膝関節部の動きに追随し、膝関節部を円滑に動かすことができるとともに、第1強伸張応力部221の膝関節部からの浮き上がり、或いは膝関節部の腱や靭帯からの位置ずれを、より一層、抑えることができる。
【0126】
また、第2強伸張応力部222によって、より確実に、第1強伸張応力部221の膝関節部からの浮き上がり、あるいは、腱や靭帯からの位置ずれを抑えることができるとともに、膝関節部の動きに追随する際の第1強伸張応力部221のつっぱり感を解消し、装着した際の違和感を無くすことができる。
【0127】
さらには、第2中強伸張応力部232によって、膝関節部の動きに伴い第1強伸張応力部221を、常時周方向の両側から引っ張り、より一層、第1強伸張応力部221の膝関節部からの浮き上がり、あるいは、腱や靭帯からの位置ずれを抑えることができる。
【0128】
また、仮に第1強伸張応力部221が腱や靭帯からの位置ずれを起こした場合でも、第1中強伸張応力部231と第2強伸張応力部222との一方又は両方によって腱や靭帯を覆うことができ、腱や靭帯を確実に保護及び固定できる。
【0129】
尚、上記第2実施形態では、第2強伸張応力部222、第3強伸張応力部223、及び第2中強伸張応力部232〜第4中強伸張応力部234を設けているが、例えばこれらの1つまたは複数、或いは全部を設けないものしても良い。あるいは、第2強伸張応力部222と第3強伸張応力部223との一方又は両方に代えて中強伸張応力部を設け、又、第2中強伸張応力部232〜第4中強伸張応力部234の内の1つまたは複数、或いは全部に代えて強伸張応力部を設けるようにしてもよい。
【0130】
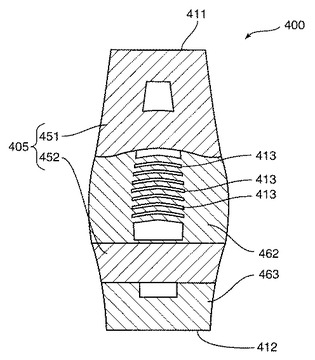
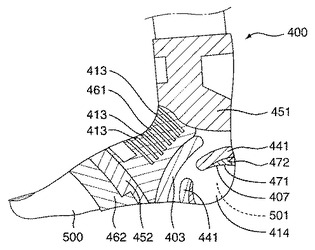
次に、第3実施形態について説明する。第3実施形態のものは、身体の足首関節部に装着されて使用される足首関節部用のものとして実施されている。この足首関節部用のサポーター400は、先の第1実施形態と同様に、サポーター本体401と、強伸張応力部402と、中強伸張応力部406とを備えている。
【0131】
サポーター本体401は、先の第1実施形態と同様に、前後両面及び左右両面を有する筒状体からなり、外筒状体と内筒状体との内外2層のものから構成されている(図6参照)。
【0132】
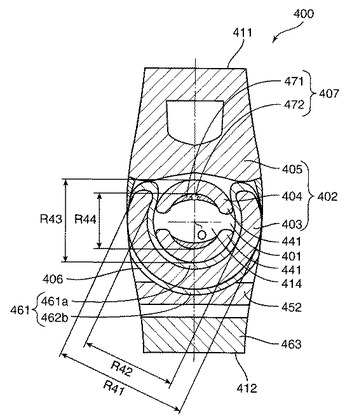
又、このサポーター本体1における上端側に足を入れる足入れ口411を、下端側に足先部を出す足出し口412を、夫々、備えているとともに、その後面側に、足の踵を被覆する踵被覆部414を備えている。また、サポーター本体401は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、足首関節部に密着できるようになっている。
【0133】
強伸張応力部402は、第1強伸張応力部403〜第3強伸張応力部405を備えている。第1強伸張応力部403は、踵被覆部414の周部に配設された湾曲状、この実施形態では円弧状のものから構成され、図19に示すように足500の踵501の周部の一部を覆うように構成されている。
【0134】
詳しくは、第1強伸張応力部403は、外径R41が100mm程度で、内径R42が70mm程度の略2/3円の大きさのものからなる。そして、足の踵への装着に際し、第1強伸張応力部403は、図21に示す足500の踵骨501aの周部における踵腓靭帯102等を有する外側側副靭帯、及び内側側副靭帯(図示せず)等の靭帯を覆って保護する。
【0135】
この第1強伸張応力部403は、先の第1実施形態の第1強伸張応力部31、32と同構成を採っている(図6、図7参照)。
【0136】
次に、強伸張応力部402の第2強伸張応力部404は、図16に示すように第1強伸張応力部403の内周(径内)側に配設されている。この実施形態における第2強伸張応力部404は、2つの円弧状のリング片441から構成されている。
【0137】
そして、これらのリング片441が、互いに対向するように配設され、これにより、第2強伸張応力部404が、踵骨501a(図21に示す)の外径と同程度の大きさの内径R44を有するリング状を呈するものとされている。
【0138】
具体的には、この実施形態の第2強伸張応力部404は、外径R43が60mm程度で、内径R44が40mm程度のリング状のものから構成されている。
【0139】
又、これらのリング片441が形成するリングの中心Oは、サポーター本体1の左右中心線O1上の点とされている。又、その中心Oは、第1強伸張応力部403の円弧中心に一致する点とされている。
【0140】
この第2強伸張応力部404は、上記第1強伸張応力部403と同じように形成されて同じ構造を有する(図6参照)。後述の第3強伸張応力部405も同じである。
【0141】
又、この実施形態では、この第2強伸張応力部404の内周側に、足首関節部に対する第1強伸張応力部403の位置決めするための位置決め部407が設けられている。
【0142】
この実施形態の位置決め部407は、先の第2実施形態の位置決め部206と同構成を採っており、区画形成表示部471と、左右中央点明示部472とを備えている。そして、この区画形成表示部471によって、踵被覆部414がほぼ円形状に区画形成されている。
【0143】
次に、第3強伸張応力部405について説明する。この第3強伸張応力部405は、主として足首関節部に対する第1強伸張応力部403の上下方向(サポーター本体401の軸方向)への位置ずれを防止するためのもので、図16に示すように、この実施形態では、上部強伸張応力部451と下部強伸張応力部452とから構成されている。
【0144】
上部強伸張応力部451は、サポーター本体401における第1強伸張応力部403の軸方向の足入れ口411側に、サポーター本体401の略全周に渡って配設されている。一方、下部強伸張応力部452は、サポーター本体401における第1強伸張応力部403の軸方向の足出し口412側に、サポーター本体401の略全周に渡って配設されている。
【0145】
次に、中強伸張応力部406について説明する。中強伸張応力部406は、この実施形態では、第1中強伸張応力部461と、第2中強伸張応力部462と、第3中強伸張応力部463とを備えている。第1中強伸張応力部461は、上記第1強伸張応力部403の外周側及び内周側の全周部に所定幅で、第1強伸張応力部403と隣接するように配設されている。
【0146】
第2中強伸張応力部462は、サポーター本体1の前面側であって、サポーター本体1における第1強伸張応力部403の周方向側の位置に配設され、足の甲部側を覆うことができるように構成されている。
【0147】
又、この第2中強伸張応力部462は、サポーター本体401の周方向に沿って延ばされているとともに、その周方向に沿う方向の両端が第1強伸張応力部403における上記周方向に沿う方向の両端夫々に連結されている。
【0148】
また、第2中強伸張応力部462には、上記周方向に延びた複数のスリット413が設けられている。これらのスリット413は、サポーター本体401によって構成されており、この実施形態では、幅が1mm程度で、周方向の長さが36mm程度のものとされている。
【0149】
第3中強伸張応力部463は、装着後のずれ防止のためのもので、サポーター本体401の下端側に、サポーター本体401の全周に渡って配設されている。
【0150】
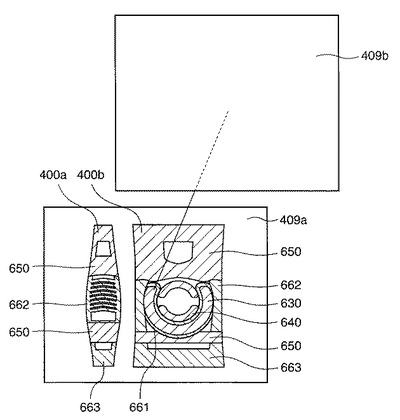
この足首関節部用のサポーター400は、先の第2実施形態の膝関節部用のサポーター200とほぼ同様にして製造される。詳しくは、図20に示すようにナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して2枚のシート体409a、409bを製作し、その内の一方のシート体409aの表面に、スクリーン印刷によって、第1強伸張応力領域部630、第2強伸張応力領域部640、第3強伸張応力領域部650、第1中強伸張応力領域部661、第2中強伸張応力領域部662及び第3中強伸張応力領域部663を形成する。
【0151】
次に、他方のシート体409bを、その一方のシート体409aの表面に重ね合わせ、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかける。
【0152】
その後、外周縁部を裁断し、サポーター400の前面を構成する前片400aと、サポーター400の後面を構成する後片400bとの2枚に裁断する。そして、その前片400aと後片400bとの左右両端同士を重ね合わせて両者を縫い着ける。以上により、第3実施形態の筒状の足首関節部用のサポーターを得ることができる。
【0153】
次に、この足首関節部用のサポーター400の動作について説明する。この足首関節部用のサポーター400を、足首関節部に装着する場合は、足首関節部用のサポーター400における第1強伸張応力部403を後方側にして足入れ口411から足を通していく。
【0154】
そして、図19に示すように位置決め部407の区画形成表示部471により区画形成された踵被覆部463を目視によって踵501にほぼ一致させるとともに、左右中央点明示部472を踵501のほぼ左右中央に目視によって位置合わせする。
【0155】
これにより、強伸張応力部2及び中強伸張応力部6を足の所定位置に配設でき、例えば、第1強伸張応力部403を、踵501の周部の靭帯を覆った位置に配設できる。
【0156】
従って、外観上、見難い強伸張応力部402及び中強伸張応力部406を、誰でも容易に足の所定位置に配設でき、使用し易いものにできる。
【0157】
この状態から足首関節部を動かすと、第1強伸張応力部403等が足首関節部の主要な靭帯を覆っているため、靭帯を保護及び固定でき、例えば足首関節部に過度の力がかかった場合でも足首関節部の靭帯の過度の伸びを抑えるができる。
【0158】
又、その際、第1強伸張応力部403の全周部に第1中強伸張応力部461を配設しているため、第1強伸張応力部403を、足首関節部の動きに追随させ易いものにでき、その足首関節部を動かした場合でも、第1強伸張応力部403がその足首関節部から浮き上がり難いものにでき、足首関節部との間に隙間ができ難いものにできる。又、装着後に第1強伸張応力部403が足首関節部の靭帯等からの位置ずれを起こし難いものにできる。
【0159】
また、第1強伸張応力部403の周方向側に第2中強伸張応力部462を、第1強伸張応力部403に連結するように配設しているため、足首関節部に対する第1強伸張応力部403の動きを、より確実に規制でき、第1強伸張応力部403の足首関節部の靭帯に対する位置ずれを、より確実に抑えることができる。
【0160】
また、第2中強伸張応力部462には、複数のスリット413が設けられているため、足首関節部の動きに第2中強伸張応力部462を追随させ易いものにできる。従って、第2中強伸張応力部462によって足首関節部を動かせ難くなるようなことを防止でき、歩行等の妨げになるおそれの少ないものにできる。
【0161】
又、第1強伸張応力部403の径内側に第2強伸張応力部404を備えているため、足首関節部の踵を、より強固にサポートすることができ、踵の周部の靭帯を確実に保護及び固定できる。
【0162】
尚、上記第3実施形態では、第2強伸張応力部403、第3強伸張応力部404、第2中強伸張応力部462、第3中強伸張応力部463を設けているが、例えばこれらの1つまたは複数、或いは全部を設けないものしても良い。あるいは、第2強伸張応力部403と第3強伸張応力部404との一方又は両方に代えて中強伸張応力部を設け、又、第2中強伸張応力部462と第3中強伸張応力部463との一方又は両方に代えて強伸張応力部を設けるようにしてもよい。以上が第3実施形態の説明である。
【0163】
尚、第1強伸張応力部の形状等は、上記第1〜第3実施形態のものに限らず、適宜変更できる。また、上記第1〜第3実施形態では、第1中強伸張応力部を、第1強伸張応力部に接するように隣接して配設しているが、第1中強伸張応力部を、第1強伸張応力部と間隔を隔てて配設するようにしても良く、適宜変更し得る。
【0164】
ただし、第1中強伸張応力部を、第1強伸張応力部に隣接させておけば、サポーター本体から第1強伸張応力部にかけて徐々に伸張応力を強くでき、間隔を隔てて配設する場合に比して第1強伸張応力部を関節部の動きに追随させ易いものにでき、その点で隣接させておくのが好ましい。
【0165】
又、上記実施形態では、強伸張応力部及び中強伸張応力部を、サポーター本体の外筒状体と内筒状体との間に合成樹脂片を点在させるようにして構成しているが、この形態のものに限らず、適宜変更できる。
【0166】
例えば強伸張応力部と中強伸張応力部との一方または両方を、編成する糸又は編み方をサポーター本体と変えることによってサポーター本体の一部にサポーター本体よりも伸張応力の強いものに形成する。或いは、強伸張応力部と中強伸張応力部との一方または両方を、サポーター本体よりも伸張応力が強くなるようにサポーター本体と別途に形成した合成樹脂製等のシート体から構成し、サポーター本体に貼り着けるようにして形成しても良い。ただし、上記実施形態のように合成樹脂片を点在させることにより、強伸張応力部及び中強伸張応力部を構成すれば、強伸張応力部及び中強伸張応力部を、所定の位置に容易に形成でき、その点で合成樹脂片を点在させるようにして強伸張応力部及び中強伸張応力部を構成するのが有利である。
【0167】
また、強伸張応力部及び中強伸張応力部を、サポーター本体の外筒状体と内筒状体との間に合成樹脂片を点在させることにより形成する場合において、用いる合成樹脂片は、ウレタン系のものに限らず、適宜変更して使用できる。
【0168】
また、上記実施形態では、合成樹脂片の点在部と非点在部の面積比を変えることにより、強伸張応力部を中強伸張応力部よりも伸張応力の強いものにしているが、この形態のものに限らず、適宜変更できる。
【0169】
例えば強伸張応力部の合成樹脂片の厚さを、中強伸張応力部の合成樹脂片の厚さよりも厚くし、強伸張応力部を中強伸張応力部よりも伸張応力の強いものにしても良い。
【0170】
また、上記実施形態では、第1中強伸張応力部は、第1強伸張応力部の全周部を囲むように配設されているが、例えば第1中強伸張応力部を、第1強伸張応力部の周部における若干の一部を除いて配設するようにしても良い。従って、本願でいう「全周部」とは、周部の全体の他、周部における若干の一部を除くほぼ全周部を含む。
【0171】
又、本発明のサポーターは、肘関節用、膝関節用、足首関節部用のものに限らず、例えば手首関節用として、或いは、肩関節用として使用でき、適宜変更できる。
【図面の簡単な説明】
【0172】
【図1】本発明の第1実施形態の肘関節用のサポーターの正面図である。
【図2】図1の背面図である。
【図3】図1の平面図である。
【図4】サポーターを展開した状態の正面図である。
【図5】第1強伸張応力部の一部を拡大した正面図である。
【図6】図5のVI−VI線断面図である。
【図7】第1中強伸張応力部の外周隣接部の一部を拡大した正面図である。
【図8】第1実施形態のサポーターを製造する際の工程の一部の説明図である。
【図9】サポーター本体、強伸張応力部、及び中強伸張応力部の引っ張り試験等による測定データを表した図表である。
【図10】本発明の第2実施形態の膝関節用のサポーターの一実施の形態の正面図である。
【図11】図10の背面図である。
【図12】図10の平面図である。
【図13】第2実施形態の第1強伸張応力部等の要部を拡大した正面図である。
【図14】第2実施形態のサポーターを製造する際の工程の一部の説明図である。
【図15】身体の膝部の構造を模式的に表した説明図である。
【図16】第3実施形態の足首関節用のサポーターの背面図である。
【図17】図16の正面図である。
【図18】図16の平面図である。
【図19】第3実施形態の足首関節用のサポーターを、足首関節部に装着した際の側面図である。
【図20】第3実施形態のサポーターを製造する際の工程の一部の説明図である。
【図21】身体の足首関節部の構造を模式的に表した説明図である。
【符号の説明】
【0173】
1、201、401 サポーター本体
2、202、402 強伸張応力部
3、203、406 中強伸張応力部
21、221,403 第1強伸張応力部
22、222、404 第2強伸張応力部
223、405 第3強伸張応力部
31、231、461 第1中強伸張応力部
32、232、462 第2中強伸張応力部
33、233、463 第3中強伸張応力部
34、234 第4中強伸張応力部
35 第5中強伸張応力部
8、206、407 位置決め部
【技術分野】
【0001】
本願発明は、身体における関節部に装着されるサポーターに関するものである。
【背景技術】
【0002】
従来から、例えば身体の膝関節部や肘関節部を固定し、支持し、圧迫し、あるいは保温等のためにサポーターが広く用いられている。このようなサポーターとして、例えば特許文献1に提案されたものがある。このサポーターは、筒状に形成した伸縮性素材より成る本体(サポーター本体)の表面の一部に、本体を形成する伸縮性素材の有するモジュラスより大なるモジュラスを有する芯材と、芯材の伸びを制限する表面材とを積層して形成した補強材を接着し、補強材の有するモジュラスは患部の動きを運動域内に制限し得る大きさとしたものである。これにより、筋や靱帯の変化が少ない日常の普通の生活状態では、本体の組織が変化するだけで追随させ、さらに動きの激しいときは、本体のみの変化から補強材の伸縮性が加わって強い応力が作用し、それ以上の筋や靱帯の動きを抑制するようにしたものである。
【特許文献1】特許第2894778号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載のものにおいては、比較的伸びやすい本体から急に伸び難い補強材を配しているため、補強材が膝関節部や肘関節部の動きに対して追随し難い。そのため、例えば膝関節部や肘関節部の靭帯等を保護するサポーターとして用いる場合、補強材で膝関節部や肘関節部の靭帯等を部分的に覆うようにして保護しておいても、例えば膝関節部が動くと補強材が膝関節部(皮膚表面)から浮き上がって膝関節部との間に空隙ができ易く、又、補強材が膝関節部の靭帯からの位置ずれを起こし易い。このような浮き上がりや位置ずれを起こすと、膝関節部近傍を適切に保護及び固定できなくなってしまう。
【0004】
本願発明は、身体の関節部近傍を適切に保護及び固定できるサポーターの提供を目的とする。
【課題を解決するための手段】
【0005】
本願発明は、次の特徴を有するものを提供することにより、上記課題を解決する。本願の請求項1記載の発明は、身体における関節部に装着されるサポーターであって、前記身体の関節部に密着可能なサポーター本体と、そのサポーター本体よりも伸張応力が強い強伸張応力部と、その強伸張応力部よりも伸張応力が弱く且つサポーター本体よりも伸張応力が強い中強伸張応力部とを備え、前記強伸張応力部は、前記身体の関節部における腱と靭帯との少なくとも一方の一部又は全体を覆うことができるように前記サポーター本体の一部に配設された第1強伸張応力部を備え、前記中強伸張応力部は、前記第1強伸張応力部の全周部に配設された第1中強伸張応力部を備えていることを特徴とするサポーターである。
【0006】
請求項2記載の発明は、請求項1に係る前記サポーター本体は、外筒状体と、その外筒状体の内周側に配設された内筒状体とを有する筒状体から構成され、前記第1強伸張応力部と第1中強伸張応力部とは、夫々、前記外筒状体と内筒状体との間に介在物を介在させるようにして構成され、前記介在物は、前記外筒状体と内筒状体とに夫々接着されていることを特徴とするサポーターである。
【0007】
請求項3記載の発明は、請求項2に係る前記介在物は、複数の合成樹脂片から構成され、前記第1強伸張応力部と第1中強伸張応力部とは、夫々、複数の合成樹脂片が点在されているとともに、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されていることを特徴とするサポーターである。
【発明の効果】
【0008】
本願発明の請求項1によれば、第1強伸張応力部の全周部に第1中強伸張応力部を配設しているため、サポーター本体から第1強伸張応力部にかけて徐々に伸張応力を強くできる。これにより、第1強伸張応力部を、関節部の動きに追随させ易いものにでき、その装着した関節部を動かした場合でも、第1強伸張応力部がその関節部から浮き上がり難いものにでき、関節部との間に隙間ができ難いものにできる。又、装着後に第1強伸張応力部が関節部の靭帯等からの位置ずれを起こし難いものにできる。従って、第1強伸張応力部で身体の関節部における靭帯や腱を覆うようにすれば靭帯や腱を適切に保護及び固定できる。
【0009】
請求項2によれば、サポーター本体は、外筒状体と内筒状体とを有する筒状体から構成される。又、第1強伸張応力部と第1中強伸張応力部とは、夫々、外筒状体と内筒状体との間に介在物を介在させるようにして構成される。そして、介在物は、外筒状体と内筒状体とに夫々接着されている。
【0010】
これにより、第1強伸張応力部と第1中強伸張応力部との引っ張り抵抗を、介在物の介在によって増大させることができ、サポーター本体よりも伸張応力の強いものにできる。
【0011】
又、外筒状体と内筒状体との間に介在物を介在させているため、使用中に介在物が他のものに当たるようなことを防止できる。従って、例えば使用や取り扱いに際して介在物が脱落し、或いは、長期間の使用によって介在物が擦り減って第1強伸張応力部や第1中強伸張応力部の伸張応力が変わるようなことを防止できる。
【0012】
請求項3によれば、介在物は、複数の合成樹脂片から構成される。そして、第1強伸張応力部と第1中強伸張応力部とは、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されている。
【0013】
これにより、伸張応力がサポーター本体よりも強い第1強伸張応力部と、伸張応力が第1強伸張応力部よりも弱く且つサポーター本体よりも強い第1中強伸張応力部とを、容易に形成できるとともに、第1中強伸張応力部を、第1強伸張応力部の全周部に容易に形成できる。
【0014】
又、面積比を変えることにより、サポーター本体と第1強伸張応力部と第1中強伸張応力部との3者間における伸張応力の強弱の程度を容易に調整できる。
【発明を実施するための最良の形態】
【0015】
以下、本願発明を実施するための最良の形態について、図面を参照しながら詳細に説明する。図1は、第1実施形態のサポーターの正面図、図2は、図1のサポーターの背面図、図3は、図1のサポーターの平面図である。
【0016】
第1実施形態のサポーター10は、身体の肘関節部に装着されて使用される肘関節用のものとされている。この肘関節用のサポーター10は、サポーター本体1と、そのサポーター本体1よりも伸張応力が強い強伸張応力部2と、その強伸張応力部2よりも伸張応力が弱く且つサポーター本体1強伸張応力部2よりも伸張応力が強い中強伸張応力部7とを備えている。
【0017】
サポーター本体1は、強伸張応力部2及び中強伸張応力部7に対して伸張応力の弱い弱伸張応力部を構成するもので、この実施形態では、前後両面及び左右両面を有する筒状体から構成されている。又、この実施形態のサポーター本体1は、変形自在なシート状の外筒状体1aと、その外筒状体1aの内周側に配設された変形自在なシート状の内筒状体1bとの内外2層のものから構成されている(図6参照)。
【0018】
これらの外筒状体1aと内筒状体1bとは、同一構成を採っており、夫々は、ナイロン糸とポリウレタン糸との2種類を少なくとも含む糸で、トリコット編みされた生地によって構成されている。
【0019】
又、図1〜図3に示すように、このサポーター本体1は、軸方向の一端側である上端側に腕を入れる腕入れ口11を、軸方向の他端側である下端側に腕を出す腕出し口12を、夫々、有する。また、サポーター本体1は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、肘関節部に密着できるようになっている。
【0020】
強伸張応力部2は、この実施形態では、第1強伸張応力部31、32〜第4強伸張応力部6を備えている。第1強伸張応力部31、32は、サポーター本体1の左側面に配設された第1側副靭帯被覆部31と、サポーター本体1の右側面に、第1側副靭帯被覆部31と周方向に距離を隔てて分離するようにして配設された第2側副靭帯被覆部32との一対の副靭帯被覆部を備えている。
【0021】
これらの第1側副靭帯被覆部31と第2側副靭帯被覆部32とのいずれか一方は、肘関節部の内側側副靭帯(図示せず)を覆って保護し、いずれか他方は、肘関節部の外側側副靭帯(図示せず)を覆って保護する。例えば右腕の肘関節部に装着させて使用する場合は、第1側副靭帯被覆部31が外側側副靭帯を覆って保護し、第2側副靭帯被覆部32が内側側副靭帯を覆って保護する。
【0022】
第1側副靭帯被覆部31と第2側副靭帯被覆部32とは、サポーター本体1の左右中心線O1に対して左右対称になるように配設されており、同一構成を採っている。以下、第1側副靭帯被覆部31についてのみ説明する。
【0023】
第1側副靭帯被覆部31は、この実施形態では、サポーター本体1の一部における外筒状体1aと内筒状体1bとの間に、複数の介在物を点在させようにして形成されている。
【0024】
詳しくは、この実施形態では、介在物として、サポーター本体1の伸張応力よりも強い伸張応力を有する合成樹脂片、例えばウレタン系樹脂片2aが用いられている。そして、図5に示すように、このウレタン系樹脂片2aは、直径2mm程度の大きさで、第1側副靭帯被覆部31を区画する領域内に点在されている。
【0025】
また、ウレタン系樹脂片2aは、第1側副靭帯被覆部31におけるウレタン系樹脂片2aを点在させた点在部23とウレタン系樹脂片2aを点在させていない非点在部24との面積比が1:1程度になるように点在されている。
【0026】
そして、このように配設されたウレタン系樹脂片2aは、図6に示すようにサポーター本体1の外筒状体1aと内筒状体1bとに夫々、接着されている。これにより、第1側副靭帯被覆部31は、ウレタン系樹脂片2aの介在によって、サポーター本体1よりも伸張応力が強いものに形成されている。又、ウレタン系樹脂片2aが外筒状体1aと内筒状体1bとに接着されることによって、サポーター本体1の外筒状体1aと内筒状体1bとが互いに移動できないようになっている。
【0027】
尚、このように構成された第1強伸張応力部の第1側副靭帯被覆部31及び第2側副靭帯被覆部32は、実際にはサポーター本体1の外筒状体1aの表面に現われ難く、外観上、目視で判別し難い状態になっているが、説明の都合上、図1、図2、図4及び図8では、第1強伸張応力部の第1側副靭帯被覆部31及び第2側副靭帯被覆部32の領域を斜線で表示している。後述の第2強伸張応力部41、42や中強伸張応力部7において同じである。
【0028】
又、上記図1、図2、図4及び図8では、強伸張応力部2における第1強伸張応力部31、32〜第4強伸張応力部6を、夫々、同じ斜線で表示し、中強伸張応力部7における後述の第1中強伸張応力部71〜第6中強伸張応力部76を、夫々、同じ斜線で表示している。更に、後述の第2実施形態における図10、図11、図13、図14、後述の第3実施形態における図16、図17、図19、図20においても同じように表している。
【0029】
次に、第2強伸張応力部41、42について説明する。この第2強伸張応力部41、42は、図1、図4に示すように第1側副靭帯被覆部31と第2側副靭帯被覆部32との間における第1側副靭帯被覆部31の右側近傍に配設された第1側副靭帯被覆補助部41と、上記間における第2側副靭帯被覆部32の左側近傍に配設された第2側副靭帯被覆補助部42とを備えている。
【0030】
第1側副靭帯被覆補助部41は、主として第1側副靭帯被覆部31の肘関節部からの浮き上がりや位置ずれを起こし難いように補助する。第2側副靭帯被覆補助部42は、主として第2側副靭帯被覆部32の肘関節部からの浮き上がりや位置ずれを起こし難いように補助する。
【0031】
これらの第1側副靭帯被覆補助部41と第2側副靭帯被覆補助部42とは、夫々、サポーター本体1の軸方向に所定長さで延ばされた帯状のものから構成され、サポーター本体1の左右中心線O1に対して左右対称になるように配設されている。
【0032】
第3強伸張応力部51、52は、第1小片51と、第1小片51と左右一対をなす第2小片52とを備えている。第1小片51は、上記第1側副靭帯被覆部31からサポーター本体1の軸方向における腕出し口12側に所定距離だけ隔てた位置に配設されている。これにより、第1小片51によって、第1側副靭帯被覆部31の肘関節部から浮き上がりや位置ずれを、より起こし難いようにしている。
【0033】
第2小片52は、上記第2側副靭帯被覆部32から上記軸方向における腕出し口12側に所定距離だけ隔てた位置に配設されている。これにより、第2小片52によって、第2側副靭帯被覆部32の肘関節部から浮き上がりや位置ずれを、より起こし難いようにしている。
【0034】
第4強伸張応力部6は、長尺状の帯状のものから構成されており、サポーター本体1の軸方向及び周方向における第1強伸張応力部31、32と第3強伸張応力部51、52との間に、長手方向がその周方向に所定の長さで延ばされている。
【0035】
また、この第4強伸張応力部6は、後述の肘頭被覆部83の中心Oからの距離がその中心Oから上記第1側副靭帯被覆補助部41までの距離及び上記第2側副靭帯被覆補助部42までの距離とほぼ同一となる位置に配設されている。
【0036】
このように構成された第4強伸張応力部6は、第1側副靭帯被覆部31及び第2側副靭帯被覆部32の肘関節部からの浮き上がりや位置ずれを、より一層起こし難いようにする。
【0037】
尚、これらの第2強伸張応力部41、42、第3強伸張応力部51、52及び第4強伸張応力部6は、上記第1強伸張応力部31、32と同一構成を採っている(図5、図6参照)。
【0038】
次に、中強伸張応力部7について説明する。中強伸張応力部7は、この実施形態では、第1中強伸張応力部71〜第6中強伸張応力部76を備えている。
【0039】
第1中強伸張応力部71は、第1強伸張応力部31、32の肘関節部からの浮き上がり、及び位置ずれを抑えるとともに、肘関節部の内側側副靭帯や外側側副靭帯を第1強伸張応力部31、32と共に保護する。
【0040】
この第1中強伸張応力部71は、第1強伸張応力部の第1側副靭帯被覆部31と第2側副靭帯被覆部32との夫々の全周部に、それら夫々と距離を隔てないように隣接して所定幅で配設されている。
【0041】
また、この実施形態では、第1中強伸張応力部71は、図7に示すように第1強伸張応力部31、32と、ほぼ同様にして構成されている。詳しくは、第1中強伸張応力部71は、サポーター本体1の第1側副靭帯被覆部31の全周部及び第2側副靭帯被覆部32の全周部に夫々、外筒状体1aと内筒状体1bとの間に合成樹脂片としてのウレタン系樹脂片2aを配設することよって形成されている。
【0042】
ただし、この第1中強伸張応力部71におけるウレタン系樹脂片2aは、ウレタン系樹脂片2aを点在させた点在部23と、ウレタン系樹脂片2aを点在させていない非点在部24との面積比が3:7程度になるように点在されている。
【0043】
このようにして、第1中強伸張応力部71における上記点在部23の非点在部24に対する面積比を、上記第1強伸張応力部31、32におけるその面積比よりも小さくすることにより、第1中強伸張応力部71の伸張応力を、サポーター本体1よりも強いが、第1強伸張応力部31、32の伸張応力よりも弱いものにしている。
【0044】
第2中強伸張応力部72a、72bは、第1強伸張応力部31、32の肘関節部からの浮き上がり、及び位置ずれを抑えるとともに、肘関節部の前腕筋群を保護する。この実施形態の第2中強伸張応力部72a、72bは、図1、図2及び図4に示すように、第1前腕筋被覆部72aと、第2前腕筋被覆部72bとの2つを備えている。
【0045】
第1前腕筋被覆部72aは、サポーター本体1の前面における第1強伸張応力部31、32よりも軸方向の腕出し口12側寄りの位置であって、肘関節部の前腕筋群の尺側手根伸筋や橈側手根伸筋の一部を被覆できる位置に配設されている。
【0046】
第2前腕筋被覆部72bは、サポーター本体1の後面における第1強伸張応力部31、32よりも軸方向の腕出し口12側寄りの位置であって、肘関節部の前腕筋群の尺側手根屈筋や橈側手根屈筋の一部を被覆できる位置に配設されている。
【0047】
第3中強伸張応力部73は、上記第3強伸張応力部の第1小片51と第2小片52との夫々の全周部に配設され、第3強伸張応力部51、52の肘関節部からの浮き上がり及び位置ずれを抑える。
【0048】
第4中強伸張応力部74a、74bは、縫製部を構成するもので、展開した状態における図4に示すサポーター本体1の左右両端夫々に配設された左端片74aと右端片74bとを備えている。
【0049】
尚、この実施形態の左端片74aの一部は、上記第1中強伸張応力部71の一部を兼備している。
【0050】
第5中強伸張応力部75と第6中強伸張応力部76は、装着後に肘関節部からのずれ落ち防止のためのもので、第5中強伸張応力部75は、サポーター本体1の軸方向における腕入れ口11側に、サポーター本体1の周方向の全周に渡って配設されている。
【0051】
一方、第6中強伸張応力部76は、サポーター本体1の軸方向における腕出し口12側に、サポーター本体1の周方向の全周に渡って配設されている。
【0052】
尚、上記第2中強伸張応力部72a、72b〜第6中強伸張応力部76は、第1中強伸張応力部71と同様にして形成されている(図7参照)。
【0053】
又、この実施形態では、サポーター本体1の前面における第1側副靭帯被覆部31と第2側副靭帯被覆部32と間に、上記靭帯に対する第1側副靭帯被覆部31及び第2側副靭帯被覆部32の位置決めをするための位置決め部8が設けられている。
【0054】
この実施形態の位置決め部8は、サポーター本体1の外筒状体1aの表面に表示された肘頭被覆部形成手段としての肘頭区画表示部81と、その肘頭区画表示部81に表示された左右中央点明示部82とから構成されている。
【0055】
肘頭区画表示部81は、2つの湾曲表示片81a、81bを備え、それらが、上部と下部に対向するように配設され、これにより、それらの内側に肘部の肘頭を覆うほぼ円形状の肘頭被覆部83を、外観上、使用者に認識できるように区画形成している。この肘頭被覆部83は、その中心Oが上記左右中央線O1上にくるように構成されている。
【0056】
又、左右中央点明示部82は、上記肘頭被覆部83の左右中心を明示したもので、肘頭区画表示部81における上部の湾曲表示片81aの内部に、その湾曲表示片81aと上記左右中央線O1とが交わる位置に配設されている。
【0057】
次に、この肘用サポーターの製造方法について説明する。まず、ナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して、図8に示すように2枚の長方形状のシート体9a、9bを製作する。
【0058】
そして、その内の一方のシート体9aの表面に、ウレタン系樹脂をスクリーン印刷によって塗布することによりウレタン系樹脂片2aを点在させる。
【0059】
これにより、第1強伸張応力領域部131、132、第2強伸張応力領域部141、142、第3強伸張応力領域部151、152、第4強伸張応力領域部160が形成される。また、同時に、第1中強伸張応力領域部171、第2中強伸張応力領域部172a、172b、第3中強伸張応力領域部173、第4中強伸張応力領域部174a、174b、第5中強伸張応力領域部175、及び第6中強伸張応力領域部176が形成される。
【0060】
そして、その他方のシート体9bを、その一方のシート体9aの表面に重ね合わせる。そして、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかけるようにして接着させる。
【0061】
これにより、第1強伸張応力領域部131、132〜第4強伸張応力領域部160のウレタン系樹脂片2a及び第1中強伸張応力領域部171〜第6中強伸張応力領域部176のウレタン系樹脂片2aと、シート体9a、9b夫々とが接着する。
【0062】
この状態で、2枚のシート体9a、9bでサポーター本体1が形成されるとともに、第1強伸張応力領域部131、132〜第4強伸張応力領域部160の夫々に、サポーター本体1よりも伸張応力が強い第1強伸張応力部31、32〜第4強伸張応力部6が形成される。又、同時に、第1中強伸張応力領域部171〜第6中強伸張応力領域部176夫々に、サポーター本体1よりも伸張応力が強く、且つ、上記第1強伸張応力部31、32〜第4強伸張応力部6よりも伸張応力が弱い第1中強伸張応力部71〜第6中強伸張応力部76が形成される。
【0063】
ここで、サポーター本体、強伸張応力部、中強伸張応力部夫々の引っ張り試験を行ったので、その測定データを図9に示す。この試験は、サポーター本体、強伸張応力部、中強伸張応力部夫々について、試験片を、縦方向(軸方向)及び横方向(周方向)に夫々、20%、50%、80%だけ伸ばした際の伸張力(gf)を取得して比較した。又、試験片として試験片幅25mmのものを用い、掴み間隔10.0cmで、引張速度5cm/minの条件で測定行った。
【0064】
その結果、強伸張応力部が最も大きい伸張力を要し、次いで中強伸張応力部で、サポーター本体が最も小さい伸張力で伸びた。すなわち、強伸張応力部が最も伸張応力が強く、次いで中強伸張応力部で、サポーター本体が最も伸張応力が弱いものであった。
【0065】
尚、上記引っ張り試験と共に、伸張性の試験も行ったので、その結果も併せて図9に表示した。この伸張性の試験は、各試験片について、1kgf、1.5kgf、2.25kgf夫々の伸張力での伸び率を調べることにより行われた。このときの引張速度は、30cm/minの条件で測定した。
【0066】
図8に戻り、説明を続けると、上述のように2枚のシート体9a、9bでサポーター本体1を形成した後、外周縁部を裁断する。これにより、図4に示す展開状態の肘関節用のサポーターが得られる。
【0067】
その後、図4に示すように上記他方のシート体9bから構成された外筒状体1aの表面に、位置決め部8を、塗料インク等の塗料を塗布することによって形成する。そして、例えばそのサポーター本体1の左右両端に設けられた右端片74bを後方側に回して左端片74aを重ね合わせて両者を縫い着ける。尚、図2では、縫い着けた後の逢着部は表していない。
【0068】
次に、この肘関節用のサポーターの動作について説明する。この肘関節用のサポーターを、例えば右腕の肘関節部に装着する場合は、肘関節用のサポーターの前面側を後側になるように前後逆にして、その状態で、腕入れ口11から腕を通していく。
【0069】
その際、強伸張応力部2を、サポーター本体1の周方向に間隔を隔てて配設しているため、例えば第1側副靭帯被覆部31と第2側副靭帯被覆部32とを連続的に全周に設けた場合に比べて拡径し易く、容易に腕を通すことができる。
【0070】
そして、位置決め部8の肘頭区画表示部81によって区画した肘頭被覆部83で肘頭を覆うようにするとともに、左右中央点明示部82を肘頭のほぼ左右中央に目視によって位置合わせする。
【0071】
これにより、例えば、第1側副靭帯被覆部31が外側側副靭帯を、第2側副靭帯被覆部32が外側側副靭帯を、夫々被覆する。また、第1前腕筋被覆部72aが尺側手根伸筋や橈側手根伸筋の一部を被覆し、第2前腕筋被覆部72bが尺側手根屈筋や橈側手根屈筋の一部を被覆する。
【0072】
従って、肘関節部への着用に際し、例えば使用者が肘関節部の内側側副靭帯や外側側副靭帯の位置を知らない場合、或いは、見難い第1側副靭帯被覆部31、第2側副靭帯被覆部32及び第1前腕筋被覆部72aを、誰でも容易に肘関節部の所定位置に配設でき、上記靭帯や筋を確実に保護及び固定できる。
【0073】
この状態から、例えば肘関節部を曲げ又は伸ばすように動かすと、第1側副靭帯被覆部31及び第2側副靭帯被覆部32が肘関節部の靭帯を覆っているため、靭帯の伸びを抑えるができ、靭帯を保護できる。
【0074】
又、その際、第1強伸張応力部31、32の全周部に配した第1中強伸張応力部71によって、第1強伸張応力部31、32が肘関節部から浮き上がって肘関節部との間に隙間ができるのを抑え、あるいは、靭帯からの位置ずれを抑えることができる。
【0075】
また、第1側副靭帯被覆部31と第2側副靭帯被覆部32とを間隔を隔てて配設しているため、第1側副靭帯被覆部31と第2側副靭帯被覆部32とが肘関節部の動きに追随し、肘関節部を円滑に動かすことができるとともに、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、或いは肘関節部の靭帯からの位置ずれを、より確実に抑えることができる。
【0076】
また、第2強伸張応力部41、42によって、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、あるいは、靭帯からの位置ずれを、より一層確実に抑えることができるとともに、肘関節部の動きに追随する際の第1側副靭帯被覆部31と第2側副靭帯被覆部32とのつっぱり感を解消し、装着した際の違和感を無くすことができる。
【0077】
さらには、第2中強伸張応力部72a、72bによって、第1側副靭帯被覆部31と第2側副靭帯被覆部32とを、常時周方向の両側から引き寄せ、第1側副靭帯被覆部31と第2側副靭帯被覆部32との肘関節部からの浮き上がり、あるいは、靭帯からの位置ずれを抑えることができる。
【0078】
また、仮に第1側副靭帯被覆部31と第2側副靭帯被覆部32とが靭帯から多少の位置ずれを起こした場合でも、第1中強伸張応力部71によって上記靭帯を覆うことができ、効率的に靭帯を保護できる。
【0079】
尚、上記第1実施形態では、第2強伸張応力部41、42〜第4強伸張応力部6、及び、第2中強伸張応力部72a、72b〜第6中強伸張応力部76を設けているが、この形態のものに限らず、適宜変更できる。
【0080】
例えば、第2強伸張応力部41、42〜第4強伸張応力部6、及び、第2中強伸張応力部72a、72b〜第6中強伸張応力部76の内の1又は複数或いは全部を設けないものとする。あるいは、第2強伸張応力部41、42〜第4強伸張応力部6内の1又は複数或いは全部に代えて中強伸張応力部を設けるようにし、又は、第2中強伸張応力部72a、72b〜第6中強伸張応力部76の内の1又は複数或いは全部に代えて強伸張応力部を設けるようにしてもよい。
【0081】
次に、本発明の第2実施形態について、説明する。第2実施形態のものは、身体の膝関節部に装着されて使用される膝関節部用のものとして実施されている。
【0082】
この第2実施形態の膝関節部用のサポーター200は、図10〜図13に示すように、サポーター本体201と、強伸張応力部202と、中強伸張応力部203とを備えている。
【0083】
サポーター本体201は、先の第1実施形態のサポーター本体201と同様に、外筒状体と内筒状体との内外2層から構成されている(図6参照)。又、外筒状体1aと内筒状体1bとは、先の第1実施形態のものと同一構成を採っている。
【0084】
又、この実施形態では、サポーター本体201の後面側における軸方向の一端側である上端側に、サポーター本体201よりも伸張応力の強い帯状の平ゴム部210aが設けられている。平ゴム部210aは、サポーター本体201よりも伸張応力が強く構成されており、これにより、装着されたサポーター本体201が膝部からずり下がり難いようにされている。
【0085】
又、このサポーター本体201は、その上端側に脚を入れる脚入れ口211を、下端側に脚を出す脚出し口212を、夫々、有する。また、サポーター本体201は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、膝関節部に密着できるようになっている。
【0086】
強伸張応力部202は、この実施形態では、第1強伸張応力部221と、第2強伸張応力部222と、第3強伸張応力部223を備えている。
【0087】
第1強伸張応力部221は、この実施形態では、図10、図13に示すように、リング状部221aと、リング状部221aから外周側に突設された突片221bとを備えたものから構成されている。
【0088】
また、第1強伸張応力部221は、そのリング状部221aの中心Oがサポーター本体1の前面における左右中心線O1上にくるようにして、サポーター本体201の前面から左右の両側面にかけて配設されている。
【0089】
リング状部221aは、その内周側に膝関節部の膝蓋骨が入る程度の大きさとされ、これにより、第1強伸張応力部221が図15に示す膝関節部300の膝蓋骨303の周部のほぼ全体を被覆できるように構成されている。より具体的には、この実施形態のリング状部221aは、図13に示すように、外径R21が120mm程度で、内径R22が100mm程度のものとされている。
【0090】
又、このリング状部221aには、周方向に複数の第1強伸張応力分断部241a、241bが設けられている。この実施形態の第1強伸張応力分断部241a、241bは、上記サポーター本体201によって構成されており、6つの幅狭分断部241aと、それらの幅狭分断部241aよりも幅の広い2つの幅広分断部241bとから構成されている。
【0091】
そして、これらの第1強伸張応力分断部241a、241bによってリング状部221aは、第1強伸張応力構成片224a〜第8強伸張応力構成片224hの8つの円弧状の小片に分断されている。
【0092】
リング状部221aにおける図13の上部側の左右一対の第1強伸張応力構成片224aと第2強伸張応力構成片224bとは、主として、図15に示す膝関節部300の四頭筋腱304を覆って保護する四頭筋腱被覆部を構成している。
【0093】
又、リング状部221aにおける図13の下部側の左右一対の第5強伸張応力構成片224eと第6強伸張応力構成片224fとは、主として、図15に示す膝関節部300の膝蓋腱301(膝蓋靭帯)を覆って保護する膝蓋腱被覆部を構成している。
【0094】
また、リング状部221aにおける図13の中央部側の第3強伸張応力構成片224c、第4強伸張応力構成片224d、第7強伸張応力構成片224g及び第3強伸張応力構成片224hは、主として、図15に示す膝関節部300の内側側副靭帯302と外側側副靭帯305との夫々を覆って保護する側副靭帯被覆部を構成している。
【0095】
突片221bは、上記第1強伸張応力構成片224a、第2強伸張応力構成片224b、第5強伸張応力構成片224e、及び第6強伸張応力構成片224fの夫々から外周側(径外側)に突設されている。そして、例えば第1強伸張応力構成片224a、第2強伸張応力構成片224b夫々に設けられた突片221bは、図15に示す膝関節部300の大腿四頭筋の一部をなす内側広筋306や外側広筋307を覆って保護する大腿四頭筋被覆部として機能する。
【0096】
このように構成された第1強伸張応力構成片224a〜第8強伸張応力構成片224g、及び突片221bは、先の第1実施形態の第1強伸張応力部31、32と同構成を採っている(図6、図7参照)。
【0097】
次に、第2実施形態における強伸張応力部202の第2強伸張応力部222について説明する。この第2強伸張応力部222は、図10、図14に示すように第1強伸張応力部221の内周側に配設されている。この実施形態における第2強伸張応力部222は、上記第1強伸張応力部221の中心Oを中心にして、図15に示す膝関節部300の膝蓋骨303の外周径と同程度の大きさ(装着時)の内径R24を有するリング状のものから構成されている。より具体的には、第2強伸張応力部22は、外径R23が87mm程度、内径R24が60mm程度の大きさのとされている。
【0098】
又、この第2強伸張応力部222には、複数の第2強伸張応力分断部242a、242bが設けられている。これらの第2強伸張応力分断部242a、242bは、上記第1強伸張応力分断部241a、241bと同様に、幅狭分断部242aと、その幅狭分断部242aよりも幅の広い幅広分断部242bとから構成されている。
【0099】
幅狭分断部242aは、4つから構成されており、上記第1強伸張応力分断部の幅狭分断部241aよりも数が2つだけ少ない。そして、これらの幅狭分断部242aは、上記第1強伸張応力分断部の幅狭分断部241aの内の4つのものと同じ幅で、同じ周方向の位置に配設されている。従って、上記第1強伸張応力分断部の幅狭分断部241aにおける他の2つの幅狭分断部241aの内周側には、第2強伸張応力部222が配設された状態になっている。
【0100】
一方、幅広分断部242bは、2つから構成されており、上記第1強伸張応力分断部の幅広分断部241bと同じ数からなる。ただし、上記幅広分断部241bよりも幅が狭く、周方向の位置が異なるように配設されている。従って、上記幅広分断部241bの一部の内周側にも、第2強伸張応力部222が配設された状態になっている。
【0101】
このようにして、第1強伸張応力分断部の一部の内周側に、第2強伸張応力部222が配設されることにより、第1強伸張応力部221の内周側を膝関節部300(図15参照)に押さえた状態にするとともに、膝関節部300の動きに伴う第1強伸張応力分断部241a、241bの変形を第2強伸張応力部222によって規制し、例えば第1強伸張応力部221の径が大きくなり過ぎないように規制している。
【0102】
尚、これらの第2強伸張応力分断部242a、242bによって第2強伸張応力部222が周方向に複数の構成片に分断されている。また、第2強伸張応力部222を構成した複数の構成片は、上記第1強伸張応力部221を構成した第1強伸張応力構成片224a〜第8強伸張応力構成片224g及び突片221bと同様に形成され、同一構造を有する(図5、図6参照)。後述の第3強伸張応力部223も同様である。
【0103】
又、この第2強伸張応力部222の内周側に、膝関節部100の腱や靭帯に対する第1強伸張応力部221の位置決めするための位置決め部206が設けられている。この位置決め部206は、先の第1実施形態の位置決め部8と同様に、膝蓋骨区画表示部261と左右中央点明示部262とを備えている。
【0104】
詳しくは、この実施形態では、膝蓋骨区画表示部261は、2つの湾曲表示片261a、261bを備え、それらによって、上記第1強伸張応力部221の中心Oを中心としたほぼリング状の膝蓋骨被覆部263が、外観上、使用者に認識できるように区画形成されている。又、膝蓋骨被覆部263は、その外径が、膝蓋骨303の外径とほぼ同程度の大きさのものからなる。
【0105】
次に、強伸張応力部202の第3強伸張応力部223について説明する。この第3強伸張応力部223は、主に、膝関節部300への装着後において、サポーター本体201のずり上がりを防止するためのもので、図11に示すように、サポーター本体1の後面側における軸方向の脚出し口212側寄りの位置に、帯状に配設されている。
【0106】
次に、第2実施形態における中強伸張応力部203について説明する。中強伸張応力部203は、図10、図11、図14に示すように、この実施形態では、第1中強伸張応力部231〜第4中強伸張応力部234を備えている。第1中強伸張応力部231は、第1強伸張応力部221の膝関節部からの浮き上がり、及び位置ずれを抑えるとともに、膝関節部300の腱や靭帯を保護する。
【0107】
この実施形態における第1中強伸張応力部231は、外周隣接部231aと、内周隣接部231bとを有している。外周隣接部231aは、第1強伸張応力部221の外周側に第1強伸張応力部221と距離を隔てないように隣接させるようにして配設されている。内周隣接部231bは、第1強伸張応力部221の内周側に第1強伸張応力部221と距離を隔てないように隣接させるようにして配設されている。
【0108】
又、外周隣接部231aには、外周隣接部用分断部243aが設けられ、内周隣接部231bには、内周隣接部用分断部243bが設けられており、これらの外周隣接部用分断部243a、内周隣接部用分断部243bによって外周隣接部231aと内周隣接部231bとが、夫々、複数の隣接部小片に分断されている。
【0109】
外周隣接部用分断部243aと内周隣接部用分断部243bとは、上記第1強伸張応力部221を分断した幅狭分断部241a及び幅広分断部241bの夫々と連結されている。
【0110】
詳しくは、上記幅狭分断部241aは、その径外側に外周隣接部用分断部243aが連結され、その径内側に内周隣接部用分断部243bが連結されている。これにより、幅狭分断部241aと外周隣接部用分断部243aと内周隣接部用分断部243bとで、1つの連続したスリット状の分断部が形成されている。
【0111】
また、上記幅広分断部241bは、その径外側に外周隣接部用分断部243aが連結され、その径内側に内周隣接部用分断部243bが連結されている。尚、この実施形態では、幅広分断部241bにおいて、外周隣接部231aが内周隣接部231bにまで延ばされて内周隣接部231bに連結されている。
【0112】
これらの外周隣接部231aと内周隣接部231bとは、先の第1実施形態の第1中強伸張応力部71と同構成を採っている(図6、図7参照)。以下の第2実施形態における第3中強伸張応力部233、第4中強伸張応力部234においても同じである。
【0113】
次に、第2実施形態の第2中強伸張応力部232について説明する。第2中強伸張応力部232は、サポーター本体201の後面側における第1強伸張応力部221及び第2強伸張応力部222の周方向側に配設されている。
【0114】
又、第2実施形態における第3中強伸張応力部233と第4中強伸張応力部234とは、装着後における主に軸方向のずれ防止のためのもので、第3中強伸張応力部233は、サポーター本体201のほぼ前面における軸方向の脚入れ口211側に配設されている。一方、第4中強伸張応力部234は、サポーター本体201の軸方向における脚出し口212側に、全周に渡って配設されている。
【0115】
このように構成された第2実施形態の膝関節部用のサポーター200は、先の第1実施形態の肘関節用のサポーター10とほぼ同様にして製造される。即ち、図14に示すように、ナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して、図14に示すように2枚のシート体209a、209bを形成する。
【0116】
そして、その内の一方のシート体209aの表面に、スクリーン印刷によって、ウレタン系樹脂片を点在させ、第1強伸張応力領域部321、第2強伸張応力領域部322、第3強伸張応力領域部323、第1中強伸張応力領域部331、第2中強伸張応力領域部332、第3中強伸張応力領域部333及び第4中強伸張応力領域部334を形成する。
【0117】
次に、他方のシート体209bを、その一方のシート体209aの表面に重ね合わせる。そして、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかけるようにして接着させる。
【0118】
その後、先の第1実施形態と同様に、外周縁部を裁断する。ただし、この実施形態では、サポーターの前面を構成する前片200aと、サポーターの後面を構成する後片200bとの2枚に裁断する。
【0119】
そして、その前片200aと後片200bとの左右両端同士を重ね合わせて両者を縫い着けてサポーター本体201を形成するとともに、そのサポーター本体201に、予め準備した平ゴム部210a(図11に図示)を縫い着ける。これにより、第2実施形態の膝関節部用のサポーター200を得ることができる。
【0120】
次に、この膝関節部用のサポーター200の動作について説明する。この膝関節部用のサポーター200を、身体の膝関節部に装着する場合は、膝関節部用のサポーター200の位置決め部206を前方側にして脚入れ口211から脚を通していく。その際、第1強伸張応力部221及び第2強伸張応力部222が前面側から左右の側面にかけての部分に配設されその後面側に第2中強伸張応力部232が配設されているため、例えば強伸張応力部を全周に設けた場合に比べて拡径し易く、容易に脚を通すことができる。
【0121】
そして、位置決め部206の膝蓋骨区画表示部261によって形成された膝蓋骨被覆部263を目視によって膝関節部300の膝蓋骨301(図15参照)にほぼ一致させるとともに、左右中央点明示部262を膝蓋骨のほぼ左右中央に目視によって位置合わせする。これにより、強伸張応力部221〜223及び中強伸張応力部231〜234を膝関節部の所定位置に配設でき、例えば、第1強伸張応力部221が、膝蓋腱301、内側側副靭帯302、外側側副靭帯303、四頭筋腱304、大腿四頭筋の外側広筋及び内側広筋等を覆った状態にできる。
【0122】
従って、強伸張応力部及び中強伸張応力部が外観上、見難い場合でも、それらを容易に膝関節部の所定位置に配設でき、使用し易いものにできると共に、膝部の腱や靭帯を覆う位置に配設できる。
【0123】
この状態から膝関節部を動かすと、第1強伸張応力部221が膝関節部の主要な腱や靭帯を覆っているため、膝部の腱や靭帯を適切に保護および固定でき、例えば膝関節部に過度の力がかかったような場合でも、腱や靭帯の過度の伸びを抑えるができ、腱や靭帯を痛めるおそれの少ないものにできる。
【0124】
又、その際、第1強伸張応力部221の全周部に配した第1中強伸張応力部231によって、第1強伸張応力部221が膝関節部から浮き上がって膝関節部との間に空隙ができ、あるいは、腱や靭帯からの位置ずれを抑えることができる。
【0125】
また、第1強伸張応力部221及び第1中強伸張応力部231に分断部が設けられているため、第1強伸張応力部221及び第1中強伸張応力部231が膝関節部の動きに追随し、膝関節部を円滑に動かすことができるとともに、第1強伸張応力部221の膝関節部からの浮き上がり、或いは膝関節部の腱や靭帯からの位置ずれを、より一層、抑えることができる。
【0126】
また、第2強伸張応力部222によって、より確実に、第1強伸張応力部221の膝関節部からの浮き上がり、あるいは、腱や靭帯からの位置ずれを抑えることができるとともに、膝関節部の動きに追随する際の第1強伸張応力部221のつっぱり感を解消し、装着した際の違和感を無くすことができる。
【0127】
さらには、第2中強伸張応力部232によって、膝関節部の動きに伴い第1強伸張応力部221を、常時周方向の両側から引っ張り、より一層、第1強伸張応力部221の膝関節部からの浮き上がり、あるいは、腱や靭帯からの位置ずれを抑えることができる。
【0128】
また、仮に第1強伸張応力部221が腱や靭帯からの位置ずれを起こした場合でも、第1中強伸張応力部231と第2強伸張応力部222との一方又は両方によって腱や靭帯を覆うことができ、腱や靭帯を確実に保護及び固定できる。
【0129】
尚、上記第2実施形態では、第2強伸張応力部222、第3強伸張応力部223、及び第2中強伸張応力部232〜第4中強伸張応力部234を設けているが、例えばこれらの1つまたは複数、或いは全部を設けないものしても良い。あるいは、第2強伸張応力部222と第3強伸張応力部223との一方又は両方に代えて中強伸張応力部を設け、又、第2中強伸張応力部232〜第4中強伸張応力部234の内の1つまたは複数、或いは全部に代えて強伸張応力部を設けるようにしてもよい。
【0130】
次に、第3実施形態について説明する。第3実施形態のものは、身体の足首関節部に装着されて使用される足首関節部用のものとして実施されている。この足首関節部用のサポーター400は、先の第1実施形態と同様に、サポーター本体401と、強伸張応力部402と、中強伸張応力部406とを備えている。
【0131】
サポーター本体401は、先の第1実施形態と同様に、前後両面及び左右両面を有する筒状体からなり、外筒状体と内筒状体との内外2層のものから構成されている(図6参照)。
【0132】
又、このサポーター本体1における上端側に足を入れる足入れ口411を、下端側に足先部を出す足出し口412を、夫々、備えているとともに、その後面側に、足の踵を被覆する踵被覆部414を備えている。また、サポーター本体401は、周方向及び軸方向等に弾性(伸縮性)を有し、これにより、足首関節部に密着できるようになっている。
【0133】
強伸張応力部402は、第1強伸張応力部403〜第3強伸張応力部405を備えている。第1強伸張応力部403は、踵被覆部414の周部に配設された湾曲状、この実施形態では円弧状のものから構成され、図19に示すように足500の踵501の周部の一部を覆うように構成されている。
【0134】
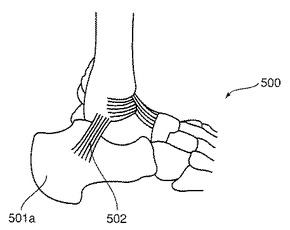
詳しくは、第1強伸張応力部403は、外径R41が100mm程度で、内径R42が70mm程度の略2/3円の大きさのものからなる。そして、足の踵への装着に際し、第1強伸張応力部403は、図21に示す足500の踵骨501aの周部における踵腓靭帯102等を有する外側側副靭帯、及び内側側副靭帯(図示せず)等の靭帯を覆って保護する。
【0135】
この第1強伸張応力部403は、先の第1実施形態の第1強伸張応力部31、32と同構成を採っている(図6、図7参照)。
【0136】
次に、強伸張応力部402の第2強伸張応力部404は、図16に示すように第1強伸張応力部403の内周(径内)側に配設されている。この実施形態における第2強伸張応力部404は、2つの円弧状のリング片441から構成されている。
【0137】
そして、これらのリング片441が、互いに対向するように配設され、これにより、第2強伸張応力部404が、踵骨501a(図21に示す)の外径と同程度の大きさの内径R44を有するリング状を呈するものとされている。
【0138】
具体的には、この実施形態の第2強伸張応力部404は、外径R43が60mm程度で、内径R44が40mm程度のリング状のものから構成されている。
【0139】
又、これらのリング片441が形成するリングの中心Oは、サポーター本体1の左右中心線O1上の点とされている。又、その中心Oは、第1強伸張応力部403の円弧中心に一致する点とされている。
【0140】
この第2強伸張応力部404は、上記第1強伸張応力部403と同じように形成されて同じ構造を有する(図6参照)。後述の第3強伸張応力部405も同じである。
【0141】
又、この実施形態では、この第2強伸張応力部404の内周側に、足首関節部に対する第1強伸張応力部403の位置決めするための位置決め部407が設けられている。
【0142】
この実施形態の位置決め部407は、先の第2実施形態の位置決め部206と同構成を採っており、区画形成表示部471と、左右中央点明示部472とを備えている。そして、この区画形成表示部471によって、踵被覆部414がほぼ円形状に区画形成されている。
【0143】
次に、第3強伸張応力部405について説明する。この第3強伸張応力部405は、主として足首関節部に対する第1強伸張応力部403の上下方向(サポーター本体401の軸方向)への位置ずれを防止するためのもので、図16に示すように、この実施形態では、上部強伸張応力部451と下部強伸張応力部452とから構成されている。
【0144】
上部強伸張応力部451は、サポーター本体401における第1強伸張応力部403の軸方向の足入れ口411側に、サポーター本体401の略全周に渡って配設されている。一方、下部強伸張応力部452は、サポーター本体401における第1強伸張応力部403の軸方向の足出し口412側に、サポーター本体401の略全周に渡って配設されている。
【0145】
次に、中強伸張応力部406について説明する。中強伸張応力部406は、この実施形態では、第1中強伸張応力部461と、第2中強伸張応力部462と、第3中強伸張応力部463とを備えている。第1中強伸張応力部461は、上記第1強伸張応力部403の外周側及び内周側の全周部に所定幅で、第1強伸張応力部403と隣接するように配設されている。
【0146】
第2中強伸張応力部462は、サポーター本体1の前面側であって、サポーター本体1における第1強伸張応力部403の周方向側の位置に配設され、足の甲部側を覆うことができるように構成されている。
【0147】
又、この第2中強伸張応力部462は、サポーター本体401の周方向に沿って延ばされているとともに、その周方向に沿う方向の両端が第1強伸張応力部403における上記周方向に沿う方向の両端夫々に連結されている。
【0148】
また、第2中強伸張応力部462には、上記周方向に延びた複数のスリット413が設けられている。これらのスリット413は、サポーター本体401によって構成されており、この実施形態では、幅が1mm程度で、周方向の長さが36mm程度のものとされている。
【0149】
第3中強伸張応力部463は、装着後のずれ防止のためのもので、サポーター本体401の下端側に、サポーター本体401の全周に渡って配設されている。
【0150】
この足首関節部用のサポーター400は、先の第2実施形態の膝関節部用のサポーター200とほぼ同様にして製造される。詳しくは、図20に示すようにナイロン糸とポリウレタン糸との2種類の糸を用いてトリコット編みされた長尺編成体を形成し、その長尺編成体を裁断加工して2枚のシート体409a、409bを製作し、その内の一方のシート体409aの表面に、スクリーン印刷によって、第1強伸張応力領域部630、第2強伸張応力領域部640、第3強伸張応力領域部650、第1中強伸張応力領域部661、第2中強伸張応力領域部662及び第3中強伸張応力領域部663を形成する。
【0151】
次に、他方のシート体409bを、その一方のシート体409aの表面に重ね合わせ、その状態で、プレス機により、所定の温度のもとで、所定時間、所定の圧力をかける。
【0152】
その後、外周縁部を裁断し、サポーター400の前面を構成する前片400aと、サポーター400の後面を構成する後片400bとの2枚に裁断する。そして、その前片400aと後片400bとの左右両端同士を重ね合わせて両者を縫い着ける。以上により、第3実施形態の筒状の足首関節部用のサポーターを得ることができる。
【0153】
次に、この足首関節部用のサポーター400の動作について説明する。この足首関節部用のサポーター400を、足首関節部に装着する場合は、足首関節部用のサポーター400における第1強伸張応力部403を後方側にして足入れ口411から足を通していく。
【0154】
そして、図19に示すように位置決め部407の区画形成表示部471により区画形成された踵被覆部463を目視によって踵501にほぼ一致させるとともに、左右中央点明示部472を踵501のほぼ左右中央に目視によって位置合わせする。
【0155】
これにより、強伸張応力部2及び中強伸張応力部6を足の所定位置に配設でき、例えば、第1強伸張応力部403を、踵501の周部の靭帯を覆った位置に配設できる。
【0156】
従って、外観上、見難い強伸張応力部402及び中強伸張応力部406を、誰でも容易に足の所定位置に配設でき、使用し易いものにできる。
【0157】
この状態から足首関節部を動かすと、第1強伸張応力部403等が足首関節部の主要な靭帯を覆っているため、靭帯を保護及び固定でき、例えば足首関節部に過度の力がかかった場合でも足首関節部の靭帯の過度の伸びを抑えるができる。
【0158】
又、その際、第1強伸張応力部403の全周部に第1中強伸張応力部461を配設しているため、第1強伸張応力部403を、足首関節部の動きに追随させ易いものにでき、その足首関節部を動かした場合でも、第1強伸張応力部403がその足首関節部から浮き上がり難いものにでき、足首関節部との間に隙間ができ難いものにできる。又、装着後に第1強伸張応力部403が足首関節部の靭帯等からの位置ずれを起こし難いものにできる。
【0159】
また、第1強伸張応力部403の周方向側に第2中強伸張応力部462を、第1強伸張応力部403に連結するように配設しているため、足首関節部に対する第1強伸張応力部403の動きを、より確実に規制でき、第1強伸張応力部403の足首関節部の靭帯に対する位置ずれを、より確実に抑えることができる。
【0160】
また、第2中強伸張応力部462には、複数のスリット413が設けられているため、足首関節部の動きに第2中強伸張応力部462を追随させ易いものにできる。従って、第2中強伸張応力部462によって足首関節部を動かせ難くなるようなことを防止でき、歩行等の妨げになるおそれの少ないものにできる。
【0161】
又、第1強伸張応力部403の径内側に第2強伸張応力部404を備えているため、足首関節部の踵を、より強固にサポートすることができ、踵の周部の靭帯を確実に保護及び固定できる。
【0162】
尚、上記第3実施形態では、第2強伸張応力部403、第3強伸張応力部404、第2中強伸張応力部462、第3中強伸張応力部463を設けているが、例えばこれらの1つまたは複数、或いは全部を設けないものしても良い。あるいは、第2強伸張応力部403と第3強伸張応力部404との一方又は両方に代えて中強伸張応力部を設け、又、第2中強伸張応力部462と第3中強伸張応力部463との一方又は両方に代えて強伸張応力部を設けるようにしてもよい。以上が第3実施形態の説明である。
【0163】
尚、第1強伸張応力部の形状等は、上記第1〜第3実施形態のものに限らず、適宜変更できる。また、上記第1〜第3実施形態では、第1中強伸張応力部を、第1強伸張応力部に接するように隣接して配設しているが、第1中強伸張応力部を、第1強伸張応力部と間隔を隔てて配設するようにしても良く、適宜変更し得る。
【0164】
ただし、第1中強伸張応力部を、第1強伸張応力部に隣接させておけば、サポーター本体から第1強伸張応力部にかけて徐々に伸張応力を強くでき、間隔を隔てて配設する場合に比して第1強伸張応力部を関節部の動きに追随させ易いものにでき、その点で隣接させておくのが好ましい。
【0165】
又、上記実施形態では、強伸張応力部及び中強伸張応力部を、サポーター本体の外筒状体と内筒状体との間に合成樹脂片を点在させるようにして構成しているが、この形態のものに限らず、適宜変更できる。
【0166】
例えば強伸張応力部と中強伸張応力部との一方または両方を、編成する糸又は編み方をサポーター本体と変えることによってサポーター本体の一部にサポーター本体よりも伸張応力の強いものに形成する。或いは、強伸張応力部と中強伸張応力部との一方または両方を、サポーター本体よりも伸張応力が強くなるようにサポーター本体と別途に形成した合成樹脂製等のシート体から構成し、サポーター本体に貼り着けるようにして形成しても良い。ただし、上記実施形態のように合成樹脂片を点在させることにより、強伸張応力部及び中強伸張応力部を構成すれば、強伸張応力部及び中強伸張応力部を、所定の位置に容易に形成でき、その点で合成樹脂片を点在させるようにして強伸張応力部及び中強伸張応力部を構成するのが有利である。
【0167】
また、強伸張応力部及び中強伸張応力部を、サポーター本体の外筒状体と内筒状体との間に合成樹脂片を点在させることにより形成する場合において、用いる合成樹脂片は、ウレタン系のものに限らず、適宜変更して使用できる。
【0168】
また、上記実施形態では、合成樹脂片の点在部と非点在部の面積比を変えることにより、強伸張応力部を中強伸張応力部よりも伸張応力の強いものにしているが、この形態のものに限らず、適宜変更できる。
【0169】
例えば強伸張応力部の合成樹脂片の厚さを、中強伸張応力部の合成樹脂片の厚さよりも厚くし、強伸張応力部を中強伸張応力部よりも伸張応力の強いものにしても良い。
【0170】
また、上記実施形態では、第1中強伸張応力部は、第1強伸張応力部の全周部を囲むように配設されているが、例えば第1中強伸張応力部を、第1強伸張応力部の周部における若干の一部を除いて配設するようにしても良い。従って、本願でいう「全周部」とは、周部の全体の他、周部における若干の一部を除くほぼ全周部を含む。
【0171】
又、本発明のサポーターは、肘関節用、膝関節用、足首関節部用のものに限らず、例えば手首関節用として、或いは、肩関節用として使用でき、適宜変更できる。
【図面の簡単な説明】
【0172】
【図1】本発明の第1実施形態の肘関節用のサポーターの正面図である。
【図2】図1の背面図である。
【図3】図1の平面図である。
【図4】サポーターを展開した状態の正面図である。
【図5】第1強伸張応力部の一部を拡大した正面図である。
【図6】図5のVI−VI線断面図である。
【図7】第1中強伸張応力部の外周隣接部の一部を拡大した正面図である。
【図8】第1実施形態のサポーターを製造する際の工程の一部の説明図である。
【図9】サポーター本体、強伸張応力部、及び中強伸張応力部の引っ張り試験等による測定データを表した図表である。
【図10】本発明の第2実施形態の膝関節用のサポーターの一実施の形態の正面図である。
【図11】図10の背面図である。
【図12】図10の平面図である。
【図13】第2実施形態の第1強伸張応力部等の要部を拡大した正面図である。
【図14】第2実施形態のサポーターを製造する際の工程の一部の説明図である。
【図15】身体の膝部の構造を模式的に表した説明図である。
【図16】第3実施形態の足首関節用のサポーターの背面図である。
【図17】図16の正面図である。
【図18】図16の平面図である。
【図19】第3実施形態の足首関節用のサポーターを、足首関節部に装着した際の側面図である。
【図20】第3実施形態のサポーターを製造する際の工程の一部の説明図である。
【図21】身体の足首関節部の構造を模式的に表した説明図である。
【符号の説明】
【0173】
1、201、401 サポーター本体
2、202、402 強伸張応力部
3、203、406 中強伸張応力部
21、221,403 第1強伸張応力部
22、222、404 第2強伸張応力部
223、405 第3強伸張応力部
31、231、461 第1中強伸張応力部
32、232、462 第2中強伸張応力部
33、233、463 第3中強伸張応力部
34、234 第4中強伸張応力部
35 第5中強伸張応力部
8、206、407 位置決め部
【特許請求の範囲】
【請求項1】
身体における関節部に装着されるサポーターであって、
前記身体の関節部に密着可能なサポーター本体と、そのサポーター本体よりも伸張応力が強い強伸張応力部と、その強伸張応力部よりも伸張応力が弱く且つサポーター本体よりも伸張応力が強い中強伸張応力部とを備え、
前記強伸張応力部は、前記身体の関節部における腱と靭帯との少なくとも一方の一部又は全体を覆うことができるように前記サポーター本体の一部に配設された第1強伸張応力部を備え、
前記中強伸張応力部は、前記第1強伸張応力部の全周部に配設された第1中強伸張応力部を備えていることを特徴とするサポーター。
【請求項2】
前記サポーター本体は、外筒状体と、その外筒状体の内周側に配設された内筒状体とを有する筒状体から構成され、
前記第1強伸張応力部と第1中強伸張応力部とは、夫々、前記外筒状体と内筒状体との間に介在物を介在させるようにして構成され、
前記介在物は、前記外筒状体と内筒状体との夫々に接着されていることを特徴とする請求項1記載のサポーター。
【請求項3】
前記介在物は、複数の合成樹脂片から構成され、
前記第1強伸張応力部と第1中強伸張応力部とは、夫々、複数の合成樹脂片が点在されているとともに、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されていることを特徴とする請求項2記載のサポーター。
【請求項1】
身体における関節部に装着されるサポーターであって、
前記身体の関節部に密着可能なサポーター本体と、そのサポーター本体よりも伸張応力が強い強伸張応力部と、その強伸張応力部よりも伸張応力が弱く且つサポーター本体よりも伸張応力が強い中強伸張応力部とを備え、
前記強伸張応力部は、前記身体の関節部における腱と靭帯との少なくとも一方の一部又は全体を覆うことができるように前記サポーター本体の一部に配設された第1強伸張応力部を備え、
前記中強伸張応力部は、前記第1強伸張応力部の全周部に配設された第1中強伸張応力部を備えていることを特徴とするサポーター。
【請求項2】
前記サポーター本体は、外筒状体と、その外筒状体の内周側に配設された内筒状体とを有する筒状体から構成され、
前記第1強伸張応力部と第1中強伸張応力部とは、夫々、前記外筒状体と内筒状体との間に介在物を介在させるようにして構成され、
前記介在物は、前記外筒状体と内筒状体との夫々に接着されていることを特徴とする請求項1記載のサポーター。
【請求項3】
前記介在物は、複数の合成樹脂片から構成され、
前記第1強伸張応力部と第1中強伸張応力部とは、夫々、複数の合成樹脂片が点在されているとともに、その第1強伸張応力部における合成樹脂片の非点在部に対する点在部の面積比が第1中強伸張応力部におけるその面積比よりも大きくなるように構成されていることを特徴とする請求項2記載のサポーター。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2010−133037(P2010−133037A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−307535(P2008−307535)
【出願日】平成20年12月2日(2008.12.2)
【出願人】(000112299)ピップフジモト株式会社 (46)
【出願人】(000138554)株式会社ユタックス (18)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月2日(2008.12.2)
【出願人】(000112299)ピップフジモト株式会社 (46)
【出願人】(000138554)株式会社ユタックス (18)
【Fターム(参考)】
[ Back to top ]