
サンプル大量採集法とイージーパス設置法ならびに移動法
【課題】本発明は、月面でのサンプル採集作業などに際し、ローバーの車輪のレゴリス内への埋まりによる走行不能や不整地上の横転などによる破損が生じない作業方法を提供することを目的とする。
【解決手段】本発明のサンプル大量採集法とイージーパス設置法ならびに移動法は、レゴリス丘斜面上の岩石等のサンプルを採集または除去するために、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバー用い、各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲し、着地後保護カプセルから収集網を引き出し複数本のワイヤを複数台のローバーが同時に巻き取って岩石等のサンプルを採取または除去し、そこにイージーパスを設置してローバーを登らせる。
【解決手段】本発明のサンプル大量採集法とイージーパス設置法ならびに移動法は、レゴリス丘斜面上の岩石等のサンプルを採集または除去するために、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバー用い、各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲し、着地後保護カプセルから収集網を引き出し複数本のワイヤを複数台のローバーが同時に巻き取って岩石等のサンプルを採取または除去し、そこにイージーパスを設置してローバーを登らせる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レゴリス丘斜面に散らばる岩石サンプルの効率的な採集法と、斜面を車輪型やクローラ型のロボットで登頂するためのイージーパス(Easy Path)の設置法ならびに、イージーパス上を走行する移動法に関し、例えば月面のレゴリス丘斜面での作業に好適である。
【背景技術】
【0002】
従来、月面での試料の採集や検査には、車輪やクローラ(無限軌道)、脚などの移動機構を用いたローバー(探査車)などが提案されている。しかしながら、月面には、急斜面や崖、谷、窪地、荒れ地などが存するとともに、月表面はレゴリスと呼ばれる細かい砂に覆われており、車輪やクローラ(無限軌道)、脚などの移動機構を採用したローバーでは、車輪などのレゴリス内への埋まりによる走行不能や不整地上の横転などによる破損が生じる問題があった。
【0003】
一方、本発明者は、先に、ワイヤ先端に装着した把持部材を目標位置に投擲するキャスティング技術を開発し、出願あるいは提供している(特許文献1、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4006528号公報
【非特許文献】
【0005】
【非特許文献1】有隅、横井、“キャスティングマニピュレーションによる物体回収動作”、第15回ロボティクスシンポジア(2010年)、p.120−127
【発明の開示】
【発明が解決しようとする課題】
【0006】
車輪やクローラ(無限軌道)、脚などの従来の移動機構を用いたローバーでは到達困難な場所へ、ローバー本体を移動させずにアクセスできるというキャスティング技術を活用したサンプル大量採集法とイージーパス設置法ならびに移動法を提供し、レゴリス内への車輪の埋まりなどによる走行不能や不整地上の横転などによる破損が生じる問題を解決することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、収集網が収納された保護カプセルと、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバーとを用いたレゴリス面または不整地面でのサンプル大量採集法であって、前記各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する工程と、保護カプセルが目標地点に着地した後、該保護カプセルから収集網を引き出し該複数本のワイヤを同時に巻き取って収集網を下方へ引っ張る工程と、ローバー周辺まで収集網を引きずり下ろし、引きずりおろした収集網内のサンプルを採集する工程と、からなるサンプル大量採集法であることを特徴とする。
また、本発明は上記サンプル大量採集法の全工程の後に、さらに、収集網を収納した保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる工程と、ローバー側に新たに支柱を立て、当該立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する工程と、ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートを投擲した支柱の側へ移動させることによりネットを広げていく工程と、ケーブルカートに搭載された装置により留め金を地面に挿して、投擲した支柱の側からネットを順に固定していき、ネットの最もローバー寄りの端を留め金で押さえて細長いネットを固定してイージーパスを完成させる工程と、からなるイージーパス設置法であることを特徴とする。
また、本発明は上記イージーパス設置法の全工程の後に、さらに、前記イージーパス上を、車輪やクローラ、脚の移動機構を備えたロボットを移動させる工程からなる移動法であることを特徴とする。
【発明の効果】
【0008】
本発明のサンプル大量採集法とイージーパス設置法ならびに移動法は、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能(車輪やクローラ、脚など)を有するローバーを用い、ローバー本体をレゴリス丘斜面の目標地点にアクセスさせることなく、ワイヤを介してローバー本体と繋がっているエンドエフェクタを目標地点へ投擲して作業を行うため、以下のような優れた効果を奏する。
機構をシンプルかつコンパクトに構成でき、ワイヤを巻き取ることにより小さくまとめられるので、運搬時の占有スペースを小さくできる。
ローバー本体のサイズに比べて、はるかに広い作業領域を確保できる。
ワイヤが軽量で柔軟であるために、他の物体にぶつかってもダメージを受けたり、与えたりしにくい。
物体を把持、回収、設置するのに、ローバー本体を移動させる必要がなく、エンドエフェクタやアームの慣性を巧みに利用して軽量なエンドエフェクタのみをキャスティングにより移動させるため、小さい駆動源で構成でき、かつエネルギー消費の低減化を図ることができる。
投擲等による空中移動を行っているので、目標点までのアクセスを極めて速く実行できる。また、高速な搬送作業を繰り返し行うことが可能である。
ローバー本体をアクセスする従来の方法では、車輪のレゴリス内への埋まりによる走行不能や不整地上の横転などによる破損が起きてシステム全体がダウンする可能性があるが、本システムでは破損等が主にエンドエフェクタに限られ、たとえ破損して使用不可能になってもワイヤから切り離して新たなエンドエフェクタを装着することによりシステムが正常な動作を継続できるので、全体的に耐故障性に優れている。
【図面の簡単な説明】
【0009】
【図1】本発明のレゴリス丘斜面上の岩石等サンプルの大量採取法を説明する概念図である。
【図2】本発明のレゴリス丘斜面うえのイージーパス設置法を説明する概念図である。
【図3】柔らかいレゴリス平地に設置したイージーパス上での本発明の移動法を説明する概念図である。
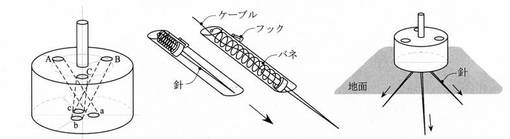
【図4】アンカー内蔵支柱のアンカー装置の一例を示す図である。
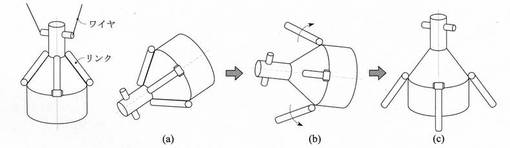
【図5】アンカー内蔵支柱の起き上がり構造の一例を示す図である。
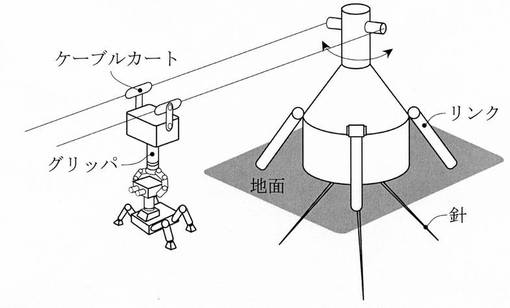
【図6】アンカー内蔵支柱に繋いだワイヤ上にロボットハンドを有するケーブルカーを設置した一例を示す図である。
【発明を実施するための形態】
【0010】
本発明のサンプル大量採集法では、ローバーの移動を妨げる平地あるいはレゴリス丘斜面上の岩石等のサンプルを採集または除去するために、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた2台のローバー用い、各ローバーの投擲用の剛体アームをスイングまたは回転し2本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲し、着地後保護カプセルから収集網を引き出し2本のワイヤを2台のローバーが同時に巻き取って岩石等のサンプルを採取または除去する。なお、用いるローバーの台数は2台に限らず、複数台であってもよく、複数本のワイヤを複数台のローバーで巻き取ることもできる。
本発明のイージーパス設置法では、上記の方法で岩石等を採集または除去したのち、ローバーによりアンカー内蔵支柱を投擲し、投擲した支柱とローバー側に立てた支柱間にワイヤをはり、該ワイヤにケーブルカートを設置して、ケーブルカートで細長いネットをレゴリス斜面に敷設固定する。レゴリス斜面に張られたネットによれば、ネット上を移動する探査車等の車輪やクローラ、脚等が埋まることを防止することができ、ネットが張られた面がイージーパスとなる。
本発明の移動法では、上記の方法で設置されたイージーパス上を、スパイクのある車輪またはクローラを用いて、ネットに車輪またはクローラのスパイクを引っかけて移動するので、急斜面でも移動ができる。
【実施例】
【0011】
(サンプルの同時大量採集法)
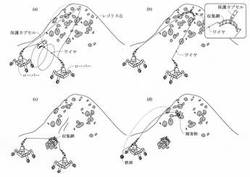
図1に、本発明のサンプル大量採集法を示す。
まず、図1(a)のようにバネにより自動的に広がる収集網が収納された保護カプセルをレゴリス丘斜面の高い位置に投擲する。投擲は投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた2台のローバーを用い、各ローバーの投擲用の剛体アームをスイングまたは回転し2本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する。なお、実際の投擲制御は、前記特許文献1、非特許文献1などに記載されている従来公知の制御方法を採用すればよい。
保護カプセルが着地したら、収集網を引き出し2本のワイヤを同時に巻き取って収集網を下方へ引っ張る(図1(b))。重い岩石の場合は、各ローバーの移動機構も併用し、2台のローバーが協調して引っ張る。重くて大きい石が転げ始めると、その大きな慣性により他の岩石も巻き込んで雪崩のような現象を起こすことが期待できる。
ローバー周辺まで引きずり下ろした岩石群は成分分析等の調査に利用する(図1(c))。
なお、収集網を引きずった場所に大きな岩石が残っていた場合は、再度、収集網を投擲するか、あるいは鉄球のような硬くて重いものを投擲し、衝突させて破壊する(図1(d))。
【0012】
(イージーパス設置法)
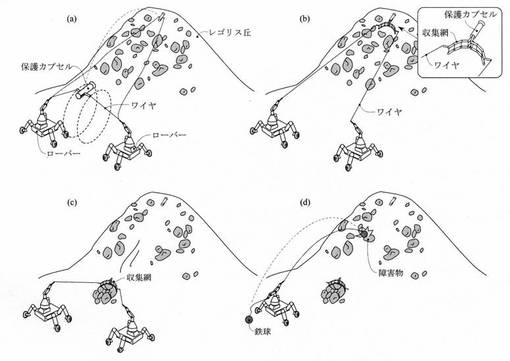
図2に、本発明のイージーパス設置法を示す。
上記サンプル大量採集法により、レゴリス丘から採集網で岩石を採集した後に、図2(a)のように収集網の収納保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる。
ローバー側に新たに立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する(図2(b))。
ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートが上方へ移動することによりネットを広げていく(図2(c))。
最高点までネットを広げたら(図2(d))、ケーブルカートに搭載されたホッチキス(留め金をレゴリス上に挿してネットを固定する装置)により、順に上からネットを固定していく(図2(e))。ネットの最下位の端を留め金で押さえて完成させる。
レゴリス上に設置したこの細長いネットを、本発明では、イージーパス(Easy Path)と呼ぶことにする。
【0013】
(移動法)
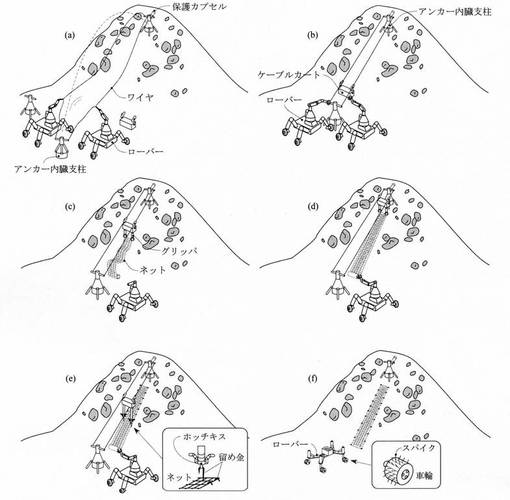
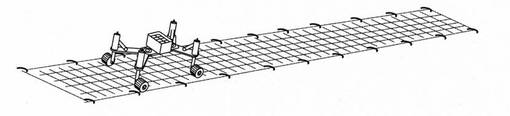
図3に、本発明の移動法を示す。図3では平地に設置したイージーパスを用いて説明しているが、図2(f)で示すようなレゴリス丘斜面でも同様である。
上記イージーパス設置法により設置されたネットの上であれば、ネットの張力により平地の柔らかいレゴリスでもローバーの車輪やクローラ、脚が埋まる可能性が軽減され、さらに、図2(f)のようなスパイクのある車輪を用いれば急斜面のネットにスパイクを引っかけることができるので、より簡便に登ることができると考えられる。
【0014】
なお、上記イージーパス設置法に用いるアンカー内蔵支柱については、例えば、図4に示すアンカー装置、図5に示すような起き上がり構造が採用できる。
図4に示したアンカー装置は、レゴリスに3本の針を刺して地面に固定するアンカー装置である。3本の針は図4の左端図のA−a、B−b、C−cのように斜めにクロスするように設置され、図4の中央図のフックを外すことにより縮まったバネの復元力により、図4の右端図のように針を円柱の下面から外に突き出す。これにより、支柱基部の円柱下のレゴリスに3本の針が斜めに刺さり、どの方向にも抜けにくい状態となる。また、針の根元に繋がったケーブルを引くことにより、針が円柱内に戻り、非固定化することも可能である。なお、固定が不十分な場合は、装置の中心軸に沿って動くドリルを地面にねじ込んで固定を強化するようにしてもよい。
図5に示す支柱起き上がり構造では、アンカー内蔵支柱の周りに、4本のリンクが装着されており、投擲による目標地点への着地時に倒れた場合、リンクを駆動して図5(a),(b),(c)のように起き上がらせることができる。起き上がった支柱を下部に搭載されたアンカー装置によりレゴリス上に固定化させることが可能となる。
なお、アンカー内蔵支柱に繋いだワイヤ上にロボットハンドが搭載されたケーブルカーを設置すれば、図6のように計測機器等を安全に運搬できる。保護カプセルで運搬するより機器の故障を避けられるが、支柱等の設置に時間を要する。
【産業上の利用可能性】
【0015】
本発明は、月面のレゴリス丘での作業を前提として説明したが、地球上における軟弱地面や不整地面での作業においても適用できることはもちろんである。
【技術分野】
【0001】
本発明は、レゴリス丘斜面に散らばる岩石サンプルの効率的な採集法と、斜面を車輪型やクローラ型のロボットで登頂するためのイージーパス(Easy Path)の設置法ならびに、イージーパス上を走行する移動法に関し、例えば月面のレゴリス丘斜面での作業に好適である。
【背景技術】
【0002】
従来、月面での試料の採集や検査には、車輪やクローラ(無限軌道)、脚などの移動機構を用いたローバー(探査車)などが提案されている。しかしながら、月面には、急斜面や崖、谷、窪地、荒れ地などが存するとともに、月表面はレゴリスと呼ばれる細かい砂に覆われており、車輪やクローラ(無限軌道)、脚などの移動機構を採用したローバーでは、車輪などのレゴリス内への埋まりによる走行不能や不整地上の横転などによる破損が生じる問題があった。
【0003】
一方、本発明者は、先に、ワイヤ先端に装着した把持部材を目標位置に投擲するキャスティング技術を開発し、出願あるいは提供している(特許文献1、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4006528号公報
【非特許文献】
【0005】
【非特許文献1】有隅、横井、“キャスティングマニピュレーションによる物体回収動作”、第15回ロボティクスシンポジア(2010年)、p.120−127
【発明の開示】
【発明が解決しようとする課題】
【0006】
車輪やクローラ(無限軌道)、脚などの従来の移動機構を用いたローバーでは到達困難な場所へ、ローバー本体を移動させずにアクセスできるというキャスティング技術を活用したサンプル大量採集法とイージーパス設置法ならびに移動法を提供し、レゴリス内への車輪の埋まりなどによる走行不能や不整地上の横転などによる破損が生じる問題を解決することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、収集網が収納された保護カプセルと、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバーとを用いたレゴリス面または不整地面でのサンプル大量採集法であって、前記各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する工程と、保護カプセルが目標地点に着地した後、該保護カプセルから収集網を引き出し該複数本のワイヤを同時に巻き取って収集網を下方へ引っ張る工程と、ローバー周辺まで収集網を引きずり下ろし、引きずりおろした収集網内のサンプルを採集する工程と、からなるサンプル大量採集法であることを特徴とする。
また、本発明は上記サンプル大量採集法の全工程の後に、さらに、収集網を収納した保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる工程と、ローバー側に新たに支柱を立て、当該立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する工程と、ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートを投擲した支柱の側へ移動させることによりネットを広げていく工程と、ケーブルカートに搭載された装置により留め金を地面に挿して、投擲した支柱の側からネットを順に固定していき、ネットの最もローバー寄りの端を留め金で押さえて細長いネットを固定してイージーパスを完成させる工程と、からなるイージーパス設置法であることを特徴とする。
また、本発明は上記イージーパス設置法の全工程の後に、さらに、前記イージーパス上を、車輪やクローラ、脚の移動機構を備えたロボットを移動させる工程からなる移動法であることを特徴とする。
【発明の効果】
【0008】
本発明のサンプル大量採集法とイージーパス設置法ならびに移動法は、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能(車輪やクローラ、脚など)を有するローバーを用い、ローバー本体をレゴリス丘斜面の目標地点にアクセスさせることなく、ワイヤを介してローバー本体と繋がっているエンドエフェクタを目標地点へ投擲して作業を行うため、以下のような優れた効果を奏する。
機構をシンプルかつコンパクトに構成でき、ワイヤを巻き取ることにより小さくまとめられるので、運搬時の占有スペースを小さくできる。
ローバー本体のサイズに比べて、はるかに広い作業領域を確保できる。
ワイヤが軽量で柔軟であるために、他の物体にぶつかってもダメージを受けたり、与えたりしにくい。
物体を把持、回収、設置するのに、ローバー本体を移動させる必要がなく、エンドエフェクタやアームの慣性を巧みに利用して軽量なエンドエフェクタのみをキャスティングにより移動させるため、小さい駆動源で構成でき、かつエネルギー消費の低減化を図ることができる。
投擲等による空中移動を行っているので、目標点までのアクセスを極めて速く実行できる。また、高速な搬送作業を繰り返し行うことが可能である。
ローバー本体をアクセスする従来の方法では、車輪のレゴリス内への埋まりによる走行不能や不整地上の横転などによる破損が起きてシステム全体がダウンする可能性があるが、本システムでは破損等が主にエンドエフェクタに限られ、たとえ破損して使用不可能になってもワイヤから切り離して新たなエンドエフェクタを装着することによりシステムが正常な動作を継続できるので、全体的に耐故障性に優れている。
【図面の簡単な説明】
【0009】
【図1】本発明のレゴリス丘斜面上の岩石等サンプルの大量採取法を説明する概念図である。
【図2】本発明のレゴリス丘斜面うえのイージーパス設置法を説明する概念図である。
【図3】柔らかいレゴリス平地に設置したイージーパス上での本発明の移動法を説明する概念図である。
【図4】アンカー内蔵支柱のアンカー装置の一例を示す図である。
【図5】アンカー内蔵支柱の起き上がり構造の一例を示す図である。
【図6】アンカー内蔵支柱に繋いだワイヤ上にロボットハンドを有するケーブルカーを設置した一例を示す図である。
【発明を実施するための形態】
【0010】
本発明のサンプル大量採集法では、ローバーの移動を妨げる平地あるいはレゴリス丘斜面上の岩石等のサンプルを採集または除去するために、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた2台のローバー用い、各ローバーの投擲用の剛体アームをスイングまたは回転し2本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲し、着地後保護カプセルから収集網を引き出し2本のワイヤを2台のローバーが同時に巻き取って岩石等のサンプルを採取または除去する。なお、用いるローバーの台数は2台に限らず、複数台であってもよく、複数本のワイヤを複数台のローバーで巻き取ることもできる。
本発明のイージーパス設置法では、上記の方法で岩石等を採集または除去したのち、ローバーによりアンカー内蔵支柱を投擲し、投擲した支柱とローバー側に立てた支柱間にワイヤをはり、該ワイヤにケーブルカートを設置して、ケーブルカートで細長いネットをレゴリス斜面に敷設固定する。レゴリス斜面に張られたネットによれば、ネット上を移動する探査車等の車輪やクローラ、脚等が埋まることを防止することができ、ネットが張られた面がイージーパスとなる。
本発明の移動法では、上記の方法で設置されたイージーパス上を、スパイクのある車輪またはクローラを用いて、ネットに車輪またはクローラのスパイクを引っかけて移動するので、急斜面でも移動ができる。
【実施例】
【0011】
(サンプルの同時大量採集法)
図1に、本発明のサンプル大量採集法を示す。
まず、図1(a)のようにバネにより自動的に広がる収集網が収納された保護カプセルをレゴリス丘斜面の高い位置に投擲する。投擲は投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた2台のローバーを用い、各ローバーの投擲用の剛体アームをスイングまたは回転し2本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する。なお、実際の投擲制御は、前記特許文献1、非特許文献1などに記載されている従来公知の制御方法を採用すればよい。
保護カプセルが着地したら、収集網を引き出し2本のワイヤを同時に巻き取って収集網を下方へ引っ張る(図1(b))。重い岩石の場合は、各ローバーの移動機構も併用し、2台のローバーが協調して引っ張る。重くて大きい石が転げ始めると、その大きな慣性により他の岩石も巻き込んで雪崩のような現象を起こすことが期待できる。
ローバー周辺まで引きずり下ろした岩石群は成分分析等の調査に利用する(図1(c))。
なお、収集網を引きずった場所に大きな岩石が残っていた場合は、再度、収集網を投擲するか、あるいは鉄球のような硬くて重いものを投擲し、衝突させて破壊する(図1(d))。
【0012】
(イージーパス設置法)
図2に、本発明のイージーパス設置法を示す。
上記サンプル大量採集法により、レゴリス丘から採集網で岩石を採集した後に、図2(a)のように収集網の収納保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる。
ローバー側に新たに立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する(図2(b))。
ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートが上方へ移動することによりネットを広げていく(図2(c))。
最高点までネットを広げたら(図2(d))、ケーブルカートに搭載されたホッチキス(留め金をレゴリス上に挿してネットを固定する装置)により、順に上からネットを固定していく(図2(e))。ネットの最下位の端を留め金で押さえて完成させる。
レゴリス上に設置したこの細長いネットを、本発明では、イージーパス(Easy Path)と呼ぶことにする。
【0013】
(移動法)
図3に、本発明の移動法を示す。図3では平地に設置したイージーパスを用いて説明しているが、図2(f)で示すようなレゴリス丘斜面でも同様である。
上記イージーパス設置法により設置されたネットの上であれば、ネットの張力により平地の柔らかいレゴリスでもローバーの車輪やクローラ、脚が埋まる可能性が軽減され、さらに、図2(f)のようなスパイクのある車輪を用いれば急斜面のネットにスパイクを引っかけることができるので、より簡便に登ることができると考えられる。
【0014】
なお、上記イージーパス設置法に用いるアンカー内蔵支柱については、例えば、図4に示すアンカー装置、図5に示すような起き上がり構造が採用できる。
図4に示したアンカー装置は、レゴリスに3本の針を刺して地面に固定するアンカー装置である。3本の針は図4の左端図のA−a、B−b、C−cのように斜めにクロスするように設置され、図4の中央図のフックを外すことにより縮まったバネの復元力により、図4の右端図のように針を円柱の下面から外に突き出す。これにより、支柱基部の円柱下のレゴリスに3本の針が斜めに刺さり、どの方向にも抜けにくい状態となる。また、針の根元に繋がったケーブルを引くことにより、針が円柱内に戻り、非固定化することも可能である。なお、固定が不十分な場合は、装置の中心軸に沿って動くドリルを地面にねじ込んで固定を強化するようにしてもよい。
図5に示す支柱起き上がり構造では、アンカー内蔵支柱の周りに、4本のリンクが装着されており、投擲による目標地点への着地時に倒れた場合、リンクを駆動して図5(a),(b),(c)のように起き上がらせることができる。起き上がった支柱を下部に搭載されたアンカー装置によりレゴリス上に固定化させることが可能となる。
なお、アンカー内蔵支柱に繋いだワイヤ上にロボットハンドが搭載されたケーブルカーを設置すれば、図6のように計測機器等を安全に運搬できる。保護カプセルで運搬するより機器の故障を避けられるが、支柱等の設置に時間を要する。
【産業上の利用可能性】
【0015】
本発明は、月面のレゴリス丘での作業を前提として説明したが、地球上における軟弱地面や不整地面での作業においても適用できることはもちろんである。
【特許請求の範囲】
【請求項1】
収集網が収納された保護カプセルと、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバーとを用いたレゴリス面または不整地面でのサンプル大量採集法であって、
前記各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する工程と、
保護カプセルが目標地点に着地した後、該保護カプセルから収集網を引き出し該複数本のワイヤを同時に巻き取って収集網を下方へ引っ張る工程と、
ローバー周辺まで収集網を引きずり下ろし、引きずり下ろした収集網内のサンプルを採集する工程と、
からなるサンプル大量採集法。
【請求項2】
請求項1記載のサンプル大量採集法の全工程の後に、さらに、
収集網の収納保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる工程と、
ローバー側に新たに支柱を立て、当該立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する工程と、
ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートを投擲した支柱の側へ移動させることによりネットを広げていく工程と、
ケーブルカートに搭載された装置により留め金を地面に挿して、投擲した支柱の側からネットを順に固定していき、ネットの最もローバー寄りの端を留め金で押さえて細長いネットを固定してイージーパスを完成させる工程と、
からなるイージーパス設置法。
【請求項3】
請求項2記載のイージーパス設置法の全工程の後に、さらに、
前記イージーパス上を、車輪やクローラ、脚の移動機構を備えたロボットを移動させる工程からなる移動法。
【請求項1】
収集網が収納された保護カプセルと、投擲機能、ワイヤ張力制御機能、ワイヤ伸展機能、物体把持機能、物体操作機能、地表上の移動機能を備えた複数台のローバーとを用いたレゴリス面または不整地面でのサンプル大量採集法であって、
前記各ローバーの投擲用の剛体アームをスイングまたは回転し複数本のワイヤの先端にエンドエフェクタとして装着された保護カプセルを目標地点に投擲する工程と、
保護カプセルが目標地点に着地した後、該保護カプセルから収集網を引き出し該複数本のワイヤを同時に巻き取って収集網を下方へ引っ張る工程と、
ローバー周辺まで収集網を引きずり下ろし、引きずり下ろした収集網内のサンプルを採集する工程と、
からなるサンプル大量採集法。
【請求項2】
請求項1記載のサンプル大量採集法の全工程の後に、さらに、
収集網の収納保護カプセルを着地させた場所に、アンカー内蔵支柱を投擲し、固定した支柱を立てる工程と、
ローバー側に新たに支柱を立て、当該立てた支柱と投擲した支柱とをワイヤで繋ぎ、ワイヤ上にケーブルカートを設置する工程と、
ケーブルカートに搭載されたグリッパでネットの端を掴み、ケーブルカートを投擲した支柱の側へ移動させることによりネットを広げていく工程と、
ケーブルカートに搭載された装置により留め金を地面に挿して、投擲した支柱の側からネットを順に固定していき、ネットの最もローバー寄りの端を留め金で押さえて細長いネットを固定してイージーパスを完成させる工程と、
からなるイージーパス設置法。
【請求項3】
請求項2記載のイージーパス設置法の全工程の後に、さらに、
前記イージーパス上を、車輪やクローラ、脚の移動機構を備えたロボットを移動させる工程からなる移動法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−241536(P2011−241536A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−111800(P2010−111800)
【出願日】平成22年5月14日(2010.5.14)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
[ Back to top ]