
サンプル測定装置
【課題】サンプルを収容した容器を昇降させる機構を備えたサンプル処理装置において、容器のヘッドに装着されるキャップ部材の機能性を高める。
【解決手段】キャップ部材200は、キャップ本体204と可動部材としての接触体206とを含む。接触体206は、重りとして機能し、且つ、押さえとして機能する。接触体206は自然状態ではキャップ本体204に対してぶら下がった状態にあり、それが容器202に載せられると、起立しながら上昇端まで到達する。その状態では正立状態が形成されて、容器が安定的に保持され、つまりその倒れ込みが防止される。接触体206の自然状態では、キャップ部材200それ全体の重心が下がって、キャップ本体200が筒状の案内部材の内部へ運動する際においてその姿勢の安定化が図られる。これにより、筒状の案内部材の内部でキャップ部材200が傾いて止まってしまう問題を回避可能である。
【解決手段】キャップ部材200は、キャップ本体204と可動部材としての接触体206とを含む。接触体206は、重りとして機能し、且つ、押さえとして機能する。接触体206は自然状態ではキャップ本体204に対してぶら下がった状態にあり、それが容器202に載せられると、起立しながら上昇端まで到達する。その状態では正立状態が形成されて、容器が安定的に保持され、つまりその倒れ込みが防止される。接触体206の自然状態では、キャップ部材200それ全体の重心が下がって、キャップ本体200が筒状の案内部材の内部へ運動する際においてその姿勢の安定化が図られる。これにより、筒状の案内部材の内部でキャップ部材200が傾いて止まってしまう問題を回避可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はサンプル測定装置に関し、特に、ラックからサンプル容器を測定ユニット内へ送り込んでサンプル中の放射性物質を測定するサンプル測定装置に関する。
【背景技術】
【0002】
サンプル測定装置は、各サンプルに対して放射線測定を行う装置である。サンプル測定装置において、ラックには複数のサンプル容器が保持される。各サンプル容器にはサンプルが収容されており、そのサンプルは、例えば、液体シンチレータが添加された被測定液体である。被測定液体としては、生体から抽出された血液、尿などをあげることができる。もちろん、そのような臨床検査以外のバイオテクノロジー、配水管理など、様々な分野においてサンプル測定装置が用いられる。
【0003】
サンプル測定装置においては、特許文献1、2に記載されているように、ラック上から取り出されたサンプル容器が測定ユニット内に収容され、その状態で、サンプルに含まれる放射性物質が測定される。具体的には、放射線物質から出た放射線が、サンプル中に混入された液体シンチレータを発光させると、その光がサンプル容器外に出て、それが光電子増倍管によって検出される。測定終了後にはサンプル容器がラック上に戻される。そして、これが各サンプル容器ごとに繰り返される。従来装置においては、ラックに保持されたサンプル容器を下から突き上げることによって、サンプル容器が測定ユニット内に送り込まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−75861号公報
【特許文献2】特開平11−311678号公報
【特許文献3】特開2007−278969号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献3に開示されたサンプル測定装置は、昇降対象となるサンプル容器に被せられるキャップ部材を備えている。キャップ部材はサンプル容器の搬送中においてサンプル容器が倒れこむことを防止し、また、サンプル容器が上昇端に到達した場合において筒状部材内へのキャップ部材の嵌り込みによってサンプル容器を位置決め、定位するものである。それはキャップ本体と重りとで構成されている。重りは、キャップ部材の下降時に2つの案内部材の繋ぎ目でキャップ部材が引っ掛かってしまうことを防止するために設けられている。
【0006】
しかし、以上のようなキャップ部材を使用するサンプル測定装置において、キャップ部材の上部に重りを設けてトップヘビーの構成が採用される場合、もしキャップ本体の下端が繋ぎ目に引っ掛かると、そこを回転中心としてキャップ部材が回転運動(倒れ込み運動)する際に重りが回転モーメントを増大させるおそれがある。上記繋ぎ目の個数が増えれば増えるだけその可能性が増大する。サンプル測定装置が通常の状態で使用されている場合に上記のような引っ掛かりが生じないとしても振動等の予想外の外力が働いて引っ掛かりが生じる可能性が大きくなることも予想される。そのような事態を防止してより一層信頼度の高いサンプル測定装置を構成することが要請される。
【0007】
一方、キャップ部材をサンプル容器に載せる際、サンプル容器に対してキャップ部材が自然に密着してサンプル容器の安定正立状態が速やかに形成されるのが望ましい。
【0008】
本発明の目的は、キャップ部材においてその働きを十分に発揮させることが可能な構造を実現することにある。本発明の他の目的はキャップ部材の下降運動時に引っ掛かりが生じないようにすることにある。
【課題を解決するための手段】
【0009】
本発明に係るサンプル測定装置は、放射性サンプルを含む容器が保持されたラックと、前記ラックと測定室との間で前記容器を上下方向に搬送する昇降機構と、前記ラックと前記測定室との間に形成された中空通路内に上下動自在に落とし込まれ、前記昇降機構によって搬送される容器のヘッドに載せられる位置決め用のキャップ部材と、を含み、前記キャップ部材は、前記ヘッドを受け入れる下向きの空洞を有するキャップ本体と、前記キャップ本体によって運動可能に保持され、重りとして機能すると共に前記容器のヘッドに当接して当該容器の位置決めを行う接触体と、を含む。
【0010】
上記構成によれば、容器のヘッド(上部)にキャップ部材が載せられ、昇降機構の昇降台とキャップ部材との間に容器が挟まれた状態が形成され、これによって容器の姿勢安定化つまり位置決めが図られる。キャップ部材は、キャップ本体と、重り且つ押さえとして機能する接触体と、を含んで構成される。接触体はキャップ本体によって運動可能に支持されており、その自然状態ではキャップ本体に対し位置あるいは姿勢の面で一定の自由度がある。しかもそれは重りであるからある程度の重量を備えている。容器が上昇すると、ヘッドに接触体が載せられる。その際、振動等に起因して容器の姿勢に若干ブレがあっても、それに追従したあるいはそのような動きを許容した自然な当接が可能となっている。望ましくは、接触時において、仮に容器に傾きが生じていても、それへの接触体の当接によってその傾きが次第に矯正され、容器の垂直状態が形成される。特に、完全に載置された後においては、その重さによって容器が押さえ付けられるから、その傾斜運動や水平運動は効果的に抑制される。この結果、容器の垂直姿勢を維持したまま容器が測定室へ的確に送り込まれる。自然状態では重りによってキャップ部材の重心が下方へ下げられているから、キャップ部材の下降運動に際してそれ自体の姿勢が安定化される。例えば、キャップ部材の下降運動時にそれが不用意に傾いてしまい経路の途中に引っ掛かってしまう可能性を低減できる。
【0011】
望ましくは、前記接触体は前記容器のヘッドに当接していない初期状態において前記キャップ本体に対して懸下された状態にあり、前記接触体はその下端部を構成する部材であって前記初期状態において前記空洞内で揺動運動可能な捕獲部材を有する。接触体はキャップ本体からぶら下がっており、つまり初期状態では捕獲部材の姿勢あるいは位置に一定の自由度がある。懸下状態では重心位置が下がっているからキャップ部材自身の安定化も図られる。
【0012】
望ましくは、前記接触体は前記キャップ本体に対して上下運動可能に設けられ、前記接触体が前記ヘッドによって突き上げられてそれが上昇端まで達した捕獲状態では前記ヘッド本体によって前記捕獲部材の揺動運動が規制される。容器のヘッドにキャップ部材が完全に載置された状態では、キャップ本体に対して接触体が上昇端に位置し、望ましくは両者の面当たりによって、接触体、特に捕獲部材の動きが規制される。つまり捕獲部材の運動は許されなくなり、それが密着している容器についてもその運動が規制される。その状態では、接触体によって逆にキャップ本体が支持されることになり、つまりキャップ本体が接触体からぶら下がった状態となる。
【0013】
望ましくは、前記捕獲部材は、大径容器のヘッドの上面に当接するリング状の大径当接面と、前記大径当接面の内部であって上方へ窪んだ形態を有し、細径容器ヘッドの上面に当接する小径当接面を有する凹部と、を含む。この構成によれば、少なくとも2種類の径に対応可能である。より多くの径に対応できるように構成してもよい。
【0014】
望ましくは、前記凹部は、前記細径容器のヘッドの角部分に当たるリング状の斜面を有する。このような斜面によって中心位置合わせあるいは位置修正を行える。
【0015】
望ましくは、前記接触体は、前記捕獲部材から上方へ延びる軸部材と、前記軸部材の上端部に形成されたフック部分と、を有し、前記本体は前記軸部材を挿通させた開口部を有する。フック部分は一般には肥大した部分である。望ましくは、前記キャップ本体は、前記空洞部の周囲を構成し、前記中空通路の内面に接触する外側面を有するスカート部と、前記スカート部の天井壁を構成し、前記接触体を運動可能に保持する構造をもった台座と、を含む。
【0016】
上記構成によれば、容器の搬送時において容器の不必要な動き、特に倒れ込みを効果的に防止することができる。振動が生じても容器が飛び跳ねることを抑制可能である。その結果、標準容器に代えて細径容器を搬送することが可能となる。キャップ本体に第2の重りを設けることも可能である。金属材料同士が摺動しないようにそれらの直接接触を回避する構成を採用するのが望ましい。中空通路が中間案内部材と下側案内部材とで構成される場合、それらの隙間で引っ掛かりが生じやすいが、そのような場合であっても上記構成によれば引っ掛かりに起因する詰まり等を効果的に防止できる。少々の引っ掛かりが生じても、それを自然に克服可能である。
【発明の効果】
【0017】
本発明によれば、キャップ部材の働きを十分に発揮させることが可能な構造を実現できる。あるいは、キャップ部材の下降運動時に引っ掛かりが生じないようにすることができる。
【図面の簡単な説明】
【0018】
【図1】一般的なサンプル測定装置の断面図である。
【図2】測定ユニットの斜視図である。
【図3】2つのシャッタ機構の動作を示す図である。
【図4】サンプル測定装置の動作例を説明するためのフローチャートである。
【図5】サンプル測定装置の動作例を説明するためのフローチャートである。
【図6】2つのシャッタ機構の間に容器が位置している状態を示す図である。
【図7】2つのシャッタ機構の動作を示す図である。
【図8】測定室内に容器が位置決めされた状態を示す図である。
【図9】2つのシャッタ機構の動作を示す図である。
【図10】測定中の状態を示す図である。
【図11】測定中の状態を示す図であり、特に一対の反射部材の作用を示す図である。
【図12】容器を測定室から下方へ運動させる過程を示す図である。
【図13】2つのシャッタ機構の間に容器が位置している状態を示す図である。
【図14】本発明に係るサンプル測定装置の実施形態を示す断面図である。
【図15】キャップ部材の断面図である。
【図16】キャップ部材の動作状態(小径容器捕獲状態)を示す断面図である。
【図17】キャップ部材の動作状態(大径容器捕獲状態)を示す断面図である。
【図18】重心位置の移動を説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0020】
最初に、図1乃至図13を用いて特開2007−278969号公報(特許文献3)に開示されたサンプル測定装置について説明した上で、それを基礎として、図14乃至図18を用いて本願における特徴的構成を説明することにする。
【0021】
(1)サンプル測定装置の一般的説明
【0022】
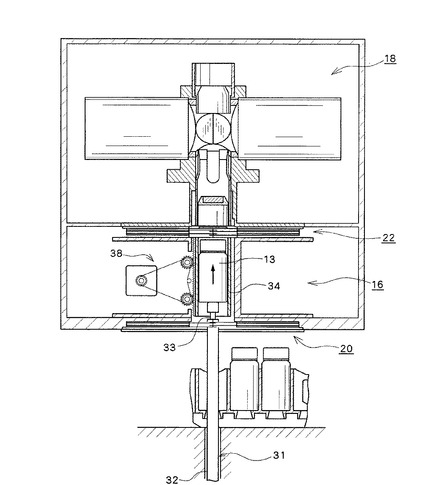
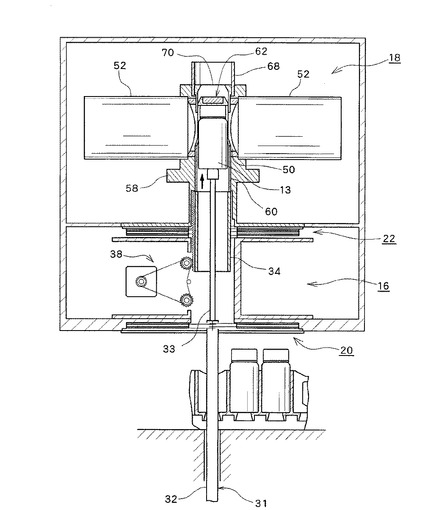
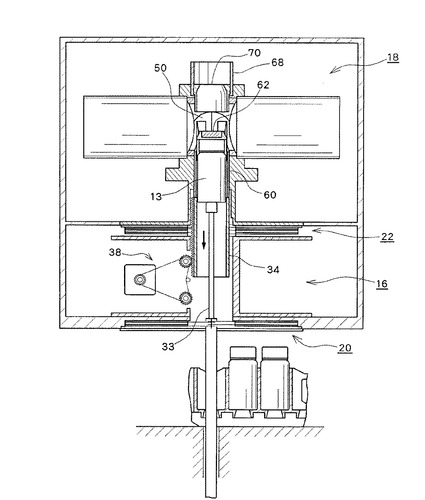
図1はサンプル測定装置における測定部の構成を示す概略的な断面図である。このサンプル測定装置は液体シンチレーションカウンタとして構成されている。もちろん、他の測定装置に本発明を適用することもできる。
【0023】
テーブル10上にはラック12が載置されている。ラック12は図示されていないラック搬送機構によって搬送される。ラック12は複数の収容孔12Aを有しており、各収容孔12Aには容器が収容されている。容器13はサンプル容器であって、試験管あるいはバイアルなどであってもよい。容器13内には液体シンチレータが添加されたサンプル(溶液)が収容されている。ラック12に形成された各収容孔12Aの下部には開口部12Bが形成されており、その開口部12Bを介して後述する押上棒31を進入させ、処理対象となるサンプル容器13を下方から上方へ押し上げることが可能である。
【0024】
押上棒31の上端部の直径は容器13の直径よりも小さい。その上端部の直径をより大きくすることも可能であるが、ラック12や下層構造への衝突、干渉が生じない限りにおいて、上端部を肥大化させる必要がある。上端部が細い場合、容器を下方から突き上げた際に容器の横倒れ等が生じ易くなる。そこで筒状の案内部材や後述するキャップ部材が利用される。
【0025】
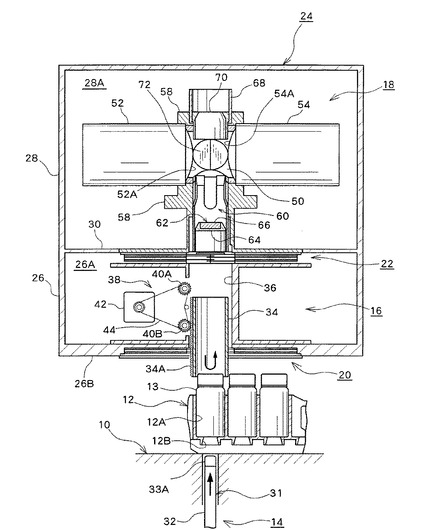
図1に示されるサンプル処理装置は、上記のラック搬送機構の他、容器搬送機構14、中継案内機構16、測定ユニット18、下シャッタ機構20及び上シャッタ機構22を有している。測定ユニット18及び中継案内機構16は遮蔽体24内に収容配置されている。具体的には、遮蔽体24は、それぞれ遮光構造をなす上部28及び下部26を有しており、下部26の内部である下部空間26Aには中継案内機構16が設けられており、上部28の内部の空間である上部空間28Aには測定ユニット18が設けられている。ちなみに、遮蔽体24は例えば鉛などの放射線遮蔽部材によって構成されている。上部28と下部26との間には隔壁30が設けられ、下部26の下側には下部壁26Bが設けられている。
【0026】
上記の容器搬送機構14は、容器13を昇降駆動するエレベータ機構である。容器搬送機構14は、上記の押上棒31を有し、押上棒31は具体的には外筒32とその内部に進退可能に設けられた中軸とによって構成されている。中軸の先端はヘッド(上端部)33Aとなっており、そのヘッド33Aによって容器13を下方から上方へ突き上げることが可能である。中軸については後に図6等を用いて説明する。容器搬送機構14はテーブル10内に設けられているが、他の構成を採用することも可能である。
【0027】
上記の中継案内機構16は、ラック12と測定ユニット18との間において容器13を中継的に案内する機構である。中継案内機構16は、昇降自在に設けられた下ガイド(中継案内部材)34を有している。具体的には、下ガイド34はフレーム36によって上下方向に運動可能に保持されており、また下ガイド34は昇降機構38によって上下方向に駆動される。フレーム36の中央部には上下方向に貫通する挿通孔が形成されており、その挿通孔を下ガイド34が通過することになる。
【0028】
昇降機構38は、図1に示される例において、モータ42、第1ピニオン40A、第2ピニオン40B及びベルト44を有している。下ガイド34の所定側面には直線的に形成されたラック34Aが設けられており、第1ピニオン40A及び第2ピニオン40Bはラック34Aと係合する。すなわち、モータ42を正方向あるいは逆方向に回転させると、それに伴ってベルト44の作用により各ピニオン40A,40Bが回転し、それと噛み合っているラック34Aの作用によって下ガイド34が上方向又は下方向に運動する。
【0029】
本実施形態において、下ガイド34は、静電気対策のために、導電性部材によって構成されており、例えばアルミニウムなどによって構成されている。下ガイド34は電気的に接地されている。下ガイド34は中空円筒形状を有しており、その上部及び下部にはそれぞれ開口が形成されている。よって、容器13は下ガイド34を通過することが可能である。下ガイド34の内径は容器13の外形に応じて適切に定められるのが望ましく、少なくとも容器13の外形よりも下ガイド34の内径を大きくし、特に、容器13がぐらつかない程度の内径とするのが望ましい。ただし、容器13としては各種のものが考えられ、容器13の形体に応じて下ガイド34及び後述する内ガイド(上ガイド)60等の形体を適宜定めるのが望ましい。また、複数種類の容器が対象となる場合にはその中で最も大きな容器の直径に適合したガイド部材を採用するのが望ましい。
【0030】
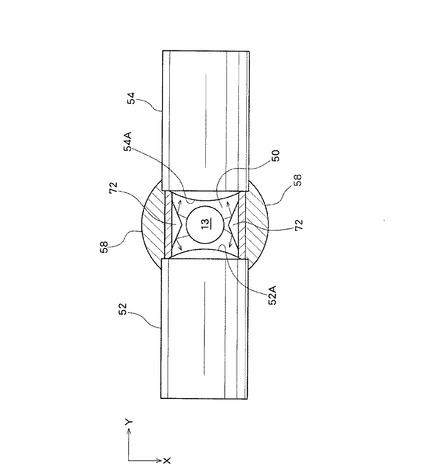
次に、測定ユニット18について説明する。測定ユニット18は容器13が収容される測定室50を有している。具体的には、測定室50はブロック状のフレーム58の内部に形成されており、フレーム58の下部は筒状の形体を有している。測定室50の両側には一対の光検出器である一対の光電子増倍管(PMT)52,54が設けられている。本実施形態において、一対の光電子増倍管52,54はそれぞれの受光面52A,54Aを互いに対向させ、すなわち各受光面52A,54Aが測定室50に臨むように、配置されている。ここで、各受光面52A,54Aは測定室50の内部側へ膨らんだ凸球面形状を有している。ただし、各受光面52A,54Aの形状は平坦であってもよい。各受光面52A,54Aの形態を本実施形態のように凸球面状とすることにより、各受光面52A,54Aの先端部分を容器13により近接させることができ、後述する反射部材72の作用と相俟って、光検出感度を向上することが可能である。
【0031】
測定室50内においては、内ガイド(上ガイド)60が上下動自在に収容されている。内ガイド60は内部案内部材として機能するものである。内ガイド60に対しては独立の駆動源は設けられておらず、後に詳述するように、下ガイド34が上方に運動した場合、その上端部が内ガイド60の下端部を突き上げることにより、当該内ガイド60が上方へ運動する。すなわち、上述した昇降機構38は、下ガイド34の駆動源として機能すると共に、内ガイド60の駆動源としても機能している。このように、単一の昇降機構を2つの駆動手段として利用することにより装置の構造を簡略化することができるという利点がある。
【0032】
図1に示す構成例では、内ガイド60の内部にキャップ部材62が落とし込まれている。キャップ部材の基底位置は図1に示されるように内ガイド60の下端縁レベルである。つまり、キャップ部材62の下端縁が内ガイド60の下端縁にあるストッパ(図示せず)によって支持されている。キャップ部材62は上昇してきた容器13のヘッドを包み込む部材であって、内ガイド60内において上下動自在に設けられており、また内ガイド60の上部開口から更に上方へ上昇して後述するホルダ部材70内に進入する。キャップ部材62は、具体的には、容器13のヘッド部分を包み込む形態をもったキャップ本体64とキャップ本体64に結合した重り66とで構成される。重り66は容器13が最上端の位置から下方に運動する際に、それに伴ってキャップ部材62が円滑に下降するために設けられている。すなわち、ホルダ部材70にキャップ部材62が引っ掛かって落ちて来ない問題を防止するために設けられている。重り66は、図示の例において、キャップ部材の上端部に固定的に設けられている。
【0033】
後に示す実施形態に係るサンプル測定装置においては、キャップ部材が特有の構造を備えている。そして、キャップ部材の基底位置は下ガイドの下端縁となっている。そこにストッパが内向きで形成されている。下ガイドの下降状態ではキャップ部材はラックに保持された測定対象容器に近接あるいは接触する。
【0034】
なお、フレーム58の下端部は上述したように筒状の形態を有し、その内部の円筒形状の空間に内ガイド60が落とし込まれている。内ガイド60の基底位置はフレーム58の下端面に形成されたストッパによって定められる。既に説明したように、キャップ部材62の基底位置は内ガイド60の下端縁に形成されたストッパによって定められている。それらのストッパについては図示省略されている。
【0035】
フレーム58の上端部には円筒形状をもった筒部材68が設けられており、筒部材68はホルダ部材70を上下動自在に保持している。ただし、筒部材68は上記同様のストッパを有しており、ホルダ部材70の基底位置を定める。後に説明するように、キャップ部材62が容器13の上昇に伴って上昇すると、キャップ部材62において先細となった上端部がホルダ70の内部に進入し、両者が嵌合した状態が形成される。その状態から更にキャップ部材62が上昇すると、ホルダ部材70もそれに伴って上昇することになる。ホルダ部材70の内部には上方にかけて先細となった開口部が形成されており、その開口部の斜面がキャップ部材62の上端部に形成された斜面と接合することによって、キャップ部材62の水平方向の位置決めが行われることになる。
【0036】
図2には、図1に示した測定ユニットが斜視図として示されている。フレーム58の下端部58Aは下方に突出しており、その内部には昇降可能に内ガイド60が収容されている。図2に示す例では、内ガイド60内に容器13が部分的に進入している。容器13のヘッドはキャップ部材62によって覆われており、容器13を上方へ運動させると、キャップ部材62もそれに伴って上方へ運動する。また上述したように中継案内部材としての下ガイドを上方へ運動させると、その上端部が内ガイド60の下端部を押し上げ、これによって内ガイド60は上方へ運動することになる。
【0037】
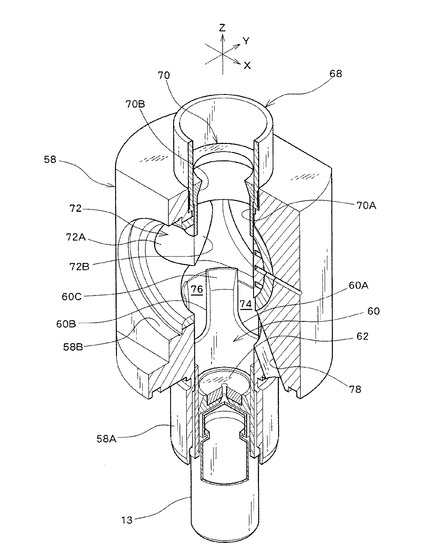
フレーム58には、図においてY方向に一対の開口部58Bが形成されている。各開口部58Bには光電子増倍管の受光面の縁部分が接続される。図2においてはそれらの光電子増倍管については図示省略されている。ホルダ部材70は上述したようにその内部が開口部となっており、その開口部にはテーパー面としての斜面70Bが形成されている。またその下方にはストレート面70Aが形成されている。測定室内には、そこに収容される容器13の近傍であって一対の受光面の間に、一対の反射部材72が配置されている。この反射部材72は第1反射面72A及び第2反射面72Bを有しており、容器13から両側へ放出された光が各反射面72A,72Bによって反射され、それが一対の受光面に導かれる。これによって光検出感度を極めて向上することが可能である。
【0038】
内ガイド60には、その中間部分から上方にかけて一対のU字溝60Aが形成されている。より具体的には、Y方向の両側に一対のU字溝60Aが形成され、それらの内部はU字型開口74を構成している。また、内ガイド60における中間部分から上方にかけて、X方向の両側に一対のU字溝60Bが形成されている。各U字溝60Bはその内部がU字型開口76を構成している。U字溝60AとU字溝60Bとの間の残留部分は突出部60Cとなっている。
【0039】
内ガイド60を上方へ運動させると、膨らみをもった一対の受光面が内ガイド60に衝突する可能性があるが、本実施形態においては一対のU字溝60Aが形成されているため、各受光面の先端部分は各開口74内に非接触で進入する。すなわち、各受光面への物理的な接触が防止されている。これにより、結果として、各受光面を、測定室内に位置決めされた容器13に近接させることが可能となる。また、内ガイド60を上方に運動させた場合、一対の反射部材72における中央の突出した部分が各開口76内に非接触で進入することになる。その結果、各反射部材72への物理的な接触が防止されている。これにより、各反射部材72を、測定室内に収容された容器13に近接させることが可能である。
【0040】
後に説明するように、内ガイド60は、容器13を測定室へ送り込む際に容器13を包み込む作用を発揮する。すなわち、容器13の上昇と共に、内ガイド60も上昇することになり、容器13が倒れたりあるいはぐらついたりするような場合でも内ガイド60によってそのような動きを一定範囲内に制限して、容器13が測定室の内部に存在する各部材に直接的に接触することを防止できる。これによって、容器13あるいは測定室内の部材の物理的保護を図ることができると共に、結果として、各受光面等を容器13へ近接する配置を許容できることになる。
【0041】
測定中においては、容器13のヘッドを保持したキャップ部材62とそれを保持するホルダ部材70との作用により、容器13の水平方向の位置決めが行えるため、容器13がぐらついたりすることはない。すなわち、測定中においては、上昇した内ガイド60が一旦下方の待機位置へ引き下げられる。これによって内ガイド60が存在することに起因する測定効率の低下といった問題を未然に防止することが可能である。もちろん、開口74,76を大開口として形成することにより、測定中においても内ガイド60を測定室内に残留させることが可能である。
【0042】
内ガイド60は静電気対策のために導電性をもった樹脂部材等で構成するのが望ましい。上記の下ガイド34と同様に内ガイド60についても電気的に接地しておくのが望ましい。これに関しては後に詳述する。なお、図2において符号78は外部線源を挿入するための挿入孔を表している。そのような外部線源は測定ユニットを校正するような場合に用いられる。
【0043】
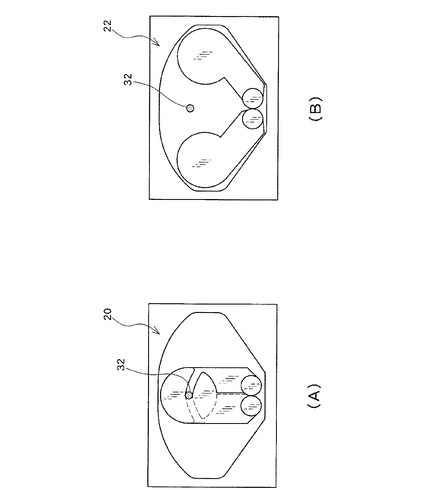
図1に示した下シャッタ機構20及び上シャッタ機構22はラック12から測定室50までの容器の搬送通路上において、特に、中間ユニットとしての中継案内機構16(及び下部26)の下部開口から測定室50(及び隔壁30)の受入開口までの間で、光遮蔽作用を発揮するものである。それぞれのシャッタ機構20,22は例えば開閉運動する複数のブレードを有しており、それらの複数のブレードによって搬送通路を閉じたり開いたりすることが可能である。本実施形態においては、後に詳述するように、少なくとも一方のシャッタ機構20,22が常に閉状態となるように制御されており、これによって測定室50内部への外来光の進入が確実に阻止されている。従来においては、1つのシャッタ機構のみが設けられており、そのシャッタ機構が開状態となる場合には、光電子増倍管を停止させたりあるいはその駆動電圧を引き下げたりする必要があったが、本実施形態においては各光電子増倍管の駆動電圧をそのまま維持することが可能である。これによって各光電子増倍管の動作の安定化を図ることができる。
【0044】
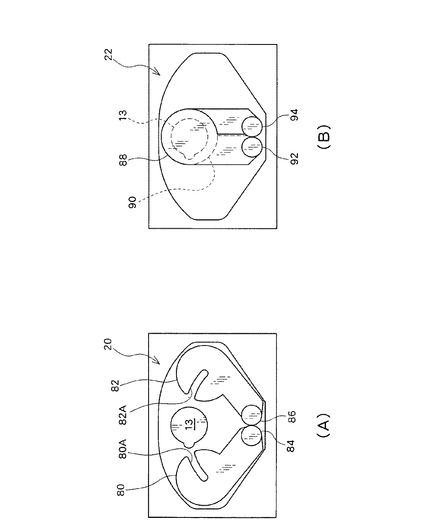
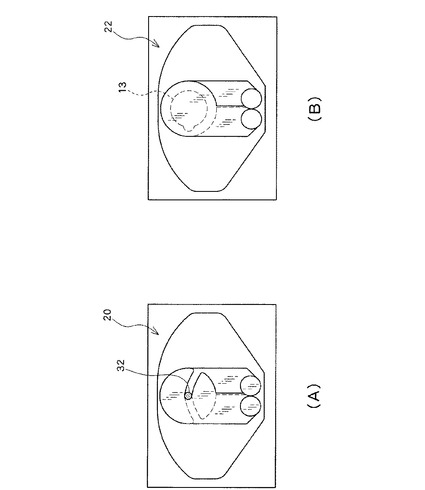
図1は、ラック12に収容された容器13を測定室50内に送り込む初期段階を示しており、図示されるように下ガイド34が最下位置(受入位置)まで下降している。このような状態においては、図3に示されるように、下シャッタ機構20が開状態であり、上シャッタ機構22が閉状態となる。下シャッタ機構20は、上述したようにブレード80,82を有しており、それらは軸84,86を中心に回転運動を行う。各ブレード80,82には、U字型をした溝80A,82Aが形成されており、一対のブレード80,82を閉動作させると一対の溝80A,82Aが互いに近接運動し、その結果として上述した押上棒における外筒32(図1)を挟み込むことができる。すなわち外筒32の周囲を光学的に遮蔽することが可能である。上シャッタ機構22は、一対のブレード88,90を有しており、それらは軸92,94を中心として開閉運動を行う。上シャッタ機構22においては、下シャッタ機構20において説明したような溝は設けられていない。
【0045】
図1において、上述した中継案内部材としての下ガイド34は、ラック12から容器13を測定室50へ上昇運動させる場合において、特に、ラック12と測定ユニット18との間の中間的な経路において、容器13が不必要に構造体に衝突してしまうことを防止する作用を発揮する。すなわち、容器13を押上棒31によって単純に下から突き上げると、容器13は水平方向に倒れ込む可能性があり、場合によっては容器13の肩部が遮蔽体24に衝突したりあるいはそのようなことを原因として容器30を破損させたりしてしまう問題が生じ得る。そこで、本実施形態においては、そのような中間的な経路において上下運動する下ガイド34を設けたので、容器13の上昇に伴って下ガイド34を上昇させ、また、容器13の下降に伴って下ガイド34を下降させることにより、下ガイド34内に容器13を収容して容器13が他の部材と直接的に接触することを効果的に防止することができる。下ガイド34の上下方向の長さは、少なくとも容器13を収容する大きさとされており、また下シャッタ機構20と上シャッタ機構22の間の空間に収まる長さとして定められている。これにより、2つのシャッタ機構20,22の間に容器13を収容して下ガイド34を位置決めした状態で2つのシャッタ機構20,22を共に閉状態とすることが可能となる。つまり一方のシャッタ機構を開状態とする前の状態を形成することが可能となる。
【0046】
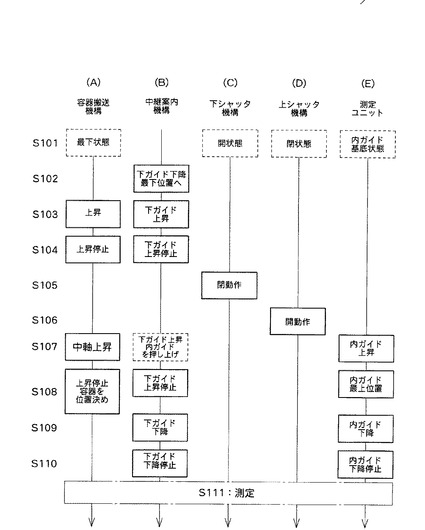
次に、図4及び図5を用いて上記のサンプル測定装置の動作の一例を説明する。図4及び図5において、(A)は図1に示した押上棒31を有する容器搬送機構14の動作を表しており、(B)は図1に示した中継案内機構16の動作を表しており、(C)は図1に示した下シャッタ機構20の動作を表しており、(D)は上述した上シャッタ機構22の動作を表しており、(E)は図1に示した測定ユニット18の動作を表している。
【0047】
S101においては、次のような状態が構築される。すなわち、押上棒31は最下位置に位置決めされ、下シャッタ機構20は開状態とされ、上シャッタ機構22は閉状態とされ、測定ユニット50においては内ガイド60が基底状態とされる。これが初期状態となる。S102においては、図1に示したように、下ガイド34がラック12方向に引き下げられ、下ガイド34が最下位置へ位置決めされる。
【0048】
S103においては、押上棒31が上方へ駆動され、これによって対象となる容器13が上方に上昇する。これと連動して下ガイド34も上方に駆動される。この場合において、容器13の上昇速度と下ガイド34の上昇速度はそれぞれ独立に定めることができ、それらは同一であってもよいし、互いに異なるものであってもよい。また上昇の開始タイミングについてもそれぞれ独立に定めることが可能である。一般的には、図1に示すように、最下位置にある下ガイド34内に容器13が完全に収容された時点をもって容器13と一緒に下ガイド34を上方へ上昇させるようにするのが望ましい。
【0049】
S104においては、図6に示すように、下シャッタ機構20と上シャッタ機構22との間の中間的な経路に容器13及び下ガイド34が進入した時点をもって、図1に示した押上棒31及び下ガイド34の上昇が停止する。具体的には、外筒32の先端部が前記中間的な経路内に進入した時点で、外筒32及び中軸33の上昇が停止する。この場合、外筒32の停止に遅れて中軸33を停止させてもよい。外筒32の先端部の構造については後に図14を用いて説明する。中軸33の上昇停止と共に下ガイド34の上昇もいったん停止する。S105では、図7に示すように下シャッタ機構22が閉動作する。これにより測定室から見て二重遮光状態が形成される。
【0050】
その後のS106では、上シャッタ機構22だけが開動作し(図9参照)、更にS107においては、押上棒21の内で中軸33だけが上昇して、それに伴い下ガイド34が上昇し、更に、以下に図8を用いて説明するように、下ガイド34の上端部が内ガイド60の下端部に当接し、内ガイド60を上方に押し上げる。すなわち、測定ユニット18内において測定室50に向かって内ガイド60が上昇する。ここで、S104〜S107で、容器13の上昇過程において、下シャッタ機構20と上シャッタ機構22との間の中間的な経路に容器13及び下ガイド34が進入した時点で、押上棒31及び下ガイド34の上昇を停止させずに、下シャッタ機構20を自動的に閉動作させ、下シャッタ機構20の閉動作後、上シャッタ機構22を自動的に開動作するようにしてもよい。
【0051】
S108においては、容器13が上昇端に位置した場合に容器13の上昇が停止し、これによって容器13が測定室50内における測定位置に位置決めされることになる。ちなみに、その測定位置は容器13内に含まれている液量などによって適宜定めることが可能であり、また容器の形態などに応じて適宜定めるのが望ましい。
【0052】
また、S108においては、容器13の上昇停止と同時に、またはそれに前後して図8に示されるように、下ガイド34の上昇が停止し、これに伴い内ガイド60の上昇も停止する。すなわち内ガイド60が最上位置に一旦位置決めされることになる。ちなみに、測定ユニット18内においては、容器13の上昇に伴って、容器13のヘッドにキャップ部材62が係合し、そのキャップ部材62が上昇運動すると、キャップ部材62がホルダ部材70内に収容されることになる。そして容器13の上昇に伴い、キャップ部材62及びホルダ部材70が上昇運動し、容器13の上昇が停止した時点でそれらの部材62,70の上昇運動も停止する。その状態では、キャップ部材62及びホルダ部材70によって容器13の水平方向の位置が適正に維持されることになる。
【0053】
S109では、容器13の位置決めが完了した後、下ガイド34が下降運動する。これに伴って内ガイド60も下降運動する。そして、下ガイド34及び内ガイド60は待機位置(退避位置)に向かうことになる。すなわち測定室50内に内ガイド60をそのまま残留させると、それによる光遮蔽作用が無視できないことから、内ガイド60を下方に引き出して測定感度の向上を図るものである。S110においては、上述したように下ガイド34及び上ガイド60の下降が停止され、それが待機位置に位置決めされる。
【0054】
S111においてはサンプルに含まれる放射性物質の測定が所定時間実行される。その状態が図10及び図11に示されている。図11においては、各反射部材72が上方から見て二等辺三角形の断面を有する部材として示されている。容器13に対してはそれぞれの光電子増倍管52,54の受光面が近接しており、また図11に示されるように、一対の反射部材72の作用によって、容器13の左右方向(すなわちX方向)に放射された光がそれらの反射部材72によって反射されて各受光面52A,54Aに導かれている。これによって従来よりも測定感度を著しく向上することが可能となる。上述したように、キャップ部材62及びホルダ部材70の作用によって容器13の位置は維持されており、内ガイド60が測定室内に存在していなくても容器13に対して周囲の部材が接触することはない。
【0055】
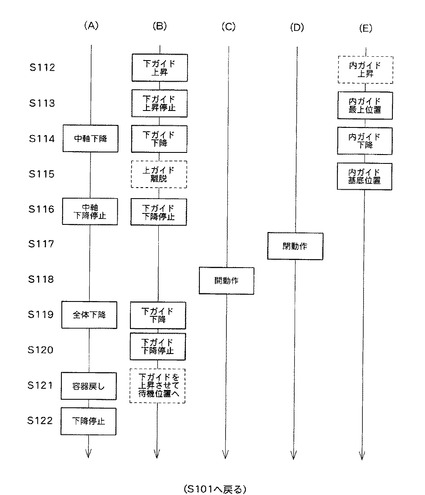
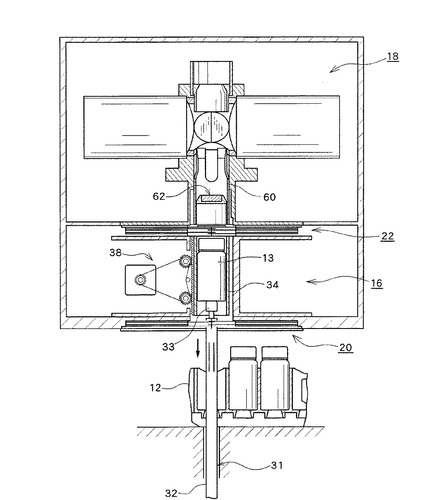
図5に移って、測定終了後のS112においては、待機位置にある下ガイド34が上方へ駆動され、これに伴い内ガイド60も上方へ駆動されることになる。S113では下ガイド34の上昇が停止され、これに伴い内ガイド60も測定室50内において、適正に位置決めされる。すなわち、内ガイド60の内部に容器13を再度収容した状態が形成される。
【0056】
S114においては、中軸33を下降させることにより、容器13が下降運動する。その状態が図12に示されており、容器13の下降に伴い、下ガイド34も下方へ駆動され、それと一緒に内ガイド60も下降運動する。そして、S115においては下ガイド34の上に載せられていた内ガイド60がストッパによって保持されることになり、すなわち内ガイド60が下ガイド34から分離した状態となる。その状態では内ガイド60は基底状態に位置決めされる。
【0057】
S116において、図13に示すように、下シャッタ機構20と上シャッタ機構22との間に下ガイド34及び容器13が収容され、中軸33が外筒32内に完全に収容された時点をもって、押上棒31の中軸33及び下ガイド34の下降が停止する。そして、S117では、上シャッタ機構22が閉動作する。S118では、下シャッタ機構20が開動作する。そして、S119においては押上棒31の全体が下降し、それに伴い、下ガイド34も下降する。ここで、S116〜S118で、容器13の下降過程において、下シャッタ機構20と上シャッタ機構22との間に容器13及び下ガイド34が進入した時点で、押上棒31の中軸33及び下ガイド34の下降を停止させずに、上シャッタ機構22を自動的に閉動作させ、上シャッタ機構22の閉動作後、下シャッタ機構20を自動的に開動作するようにしてもよい。
【0058】
S120においては、下ガイド34が下方端に到達した時点でその運動が停止する。S121においては、容器13がラック12上に戻される。そのような段階において、必要であれば、下ガイド34が上昇駆動されて次の容器を受け入れるために待機位置へ位置決めされる。S122では、押上棒31の下降が完全に停止する。その後、S101の工程へ戻って、次の容器に対する処理が繰り返される。
【0059】
上記構成によれば、測定中においてキャップ部材62等によって容器13の位置決めを図ることができるので、容器13の側面が不必要に受光面に接触して受光面を傷つけてしまうことを未然に防止することができる。このことは結果として受光面を容器13により近接することが可能であるということを意味する。またキャップ部材62によって容器13の昇降運動時においても容器13を位置決め保持を行える。キャップ部材62に除電部材が設けられてもよい。ちなみに、筒状部材は銅などの金属によって構成され、その内部に上下動自在に設けられるホルダ部材は樹脂などによって構成される。
【0060】
(2)本実施形態に係るサンプル測定装置の説明
【0061】
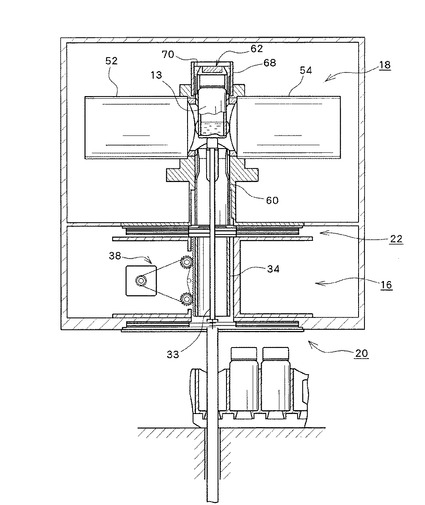
図14には、本実施形態に係るサンプル測定装置の構成が断面図として示されている。なお、図1に示した構成についてはその説明を省略し、以下においては、図1に示されていない構成を中心に説明を行う。
【0062】
図14に示す構成では、下ガイド34の中にキャップ部材200が落とし込まれている。キャップ部材200は、下ガイド34及び内ガイド60の両者に跨って運動することが可能である。内ガイド60の下端縁にキャップ部材200用のストッパは形成されておらず、それは下ガイド34の下端縁に形成されている。それが下ガイド34の途中に形成されてもよい。容器202の上昇運動に先立って、下ガイド34が容器202に近付けられ、あるいは、それを部分的に収容し、その際において、キャップ部材200が容器202に近付けられ、あるいは、それに接触する。
【0063】
容器200の上昇前にあるいは上昇開始後間もなくして容器202のヘッドにはキャップ部材200が載せられることになる。そして、両者が一体化された状態のまま両者が上方へ引き上げられる。測定終了後においては、キャップ部材200が容器202に載せられたまま、容器200が下降へ引き下ろされ、その際において、キャップ部材200は下ガイド34の規定位置まで落とし込まれる。キャップ部材200は、下ガイド34と内ガイド60の中をそれらの動きに合わせて移動することになる。キャップ部材200は、従来のキャップ部材と同様に測定時における位置決め保持の作用を発揮する。キャップ部材が容器202の上昇過程の早い段階で容器202に載置され、その状態では容器202の姿勢の安定化、位置決めが図られる。容器202の搬送過程ではその垂直姿勢が維持される。つまり、不用意な倒れ込みが防止される。
【0064】
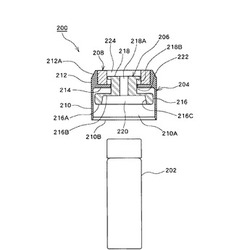
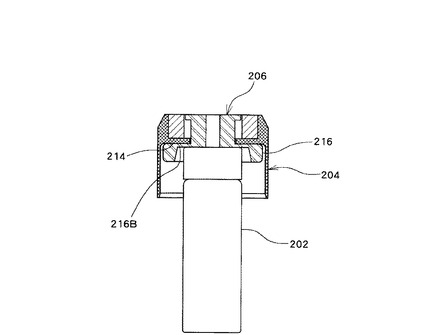
図15には、キャップ部材200の拡大断面図が示されている。キャップ部材200は、枠体をなすキャップ本体204とキャップ本体204に対して相対運動可能な接触体206とを有する。キャップ本体204は、硬質樹脂等によって構成され、それは、筒状を有するスカート部210と、その上部をなす上端部212と、を有する。上端部212は、上方に開いた凹部224を有し、また、凹部224の底面壁あるいは空洞部210Bの天井壁を構成する水平台座214を有する。水平台座214の中央部には上下に貫通した円形の開口部222が形成されている。接触体206は、水平方向に広がった捕獲部分216及びその上面中央部から上方へ伸長した軸部218を有し、軸部218の上端が水平方向に張り出ており、それがフック218Bを構成している。それは開口部222のサイズよりも大きく、フック222は接触体206の自由懸下状態で開口部に引っ掛かる。図15においては、説明のため、接触体206が上方にやや浮上している状態が示されている。
【0065】
捕獲部分216は、空洞部210Aの中に位置し、その水平運動あるいは揺動運動が許容されている。すなわち、キャップ本体204に対して接触体206特に捕獲部分216がぶら下がった状態におかれている。捕獲部分216は、容器上面(容器ヘッド上面)への当接時に姿勢変更可能な状態におかれており、面重合状態を早々に形成可能である。捕獲部分216は、下方に向いた凹部220を有し、その中には天井面として構成される円形の当接面210Bが存在する。凹部220の周囲は下方に突き出たリング状の部分を構成しており、その下面はリング状の当接面216Aを構成している。それらは自然状態あるいは懸下状態において水平面をなす。凹部220の側面210Aは斜面(テーパー面)を構成しており、キャップ部材200の装着時に容器の角部分(エッジが)が側面210Aに当たると、その容器に対して中心方向へ復帰力が生じる。容器の倒れ込み運動は、容器の上面と当接面216Bとの面重合によって規制される。その面重合状態の初期において仮に容器及び接触体206が傾斜姿勢となっても、キャップ部材200が容器に完全に載置されるに至った状態では、捕獲部分216が上昇端へ到達し、捕獲部分216の上面と水平台座214の下面とが完全に密着して、接触体206が完全に起立状態(正立状態)となるから、容器の傾斜姿勢は自然に解消されて、それは正立姿勢となる。軸部分218の長さ、特に、捕獲部材216の上面とフック222との間の距離が接触体206の上下方向のストロークを規定する。また、開口部222の直径と軸部分218の直径との差が接触体206の姿勢変化の幅を規定する。軸部分206の中心には貫通孔218Aが形成されている。それは必要に応じて空気抜き孔として機能する。
【0066】
上記のように捕獲部分216には2つの当接面216A,216Bが形成されており、それらによって少なくとも2種類の容器(大径で背の低い容器、小径で背の高い容器)に対応可能である。その構造及び形態を工夫することにより、様々な容器に対応することが可能である。なお、捕獲部分216が運動してもそれがキャップ本体204に接触することはない。但し、キャップ本体204によってその運動が規制されてもよい。
【0067】
接触体206は、ステンレス、真鍮等の金属によって形成されており、キャップ部材200は重りとして機能と容器押さえとしての機能とを発揮する。図15に示されるように、接触体206においてその下端部を構成する捕獲部分が肥大しており、接触体206それ自体の重心位置がかなり下がっており、接触体206を含むキャップ部材220全体としても重心位置がかなり下がっている。接触体206の懸下状態の他、接触体206が上昇端にあっても、キャップ部材200それ全体としての重心は比較的低い位置にある。もっとも、接触体206が上昇端にあるということはそれが完全に容器上に載置されたということを意味するから、その状態では、逆に接触体206に対してキャップ本体204がぶら下がった状態となる。キャップ本体204の上端部における角部分は斜めに切り取られており、上方に向かって先細形状が構成されている。空洞部210Aの周囲をなす内側面の下端部分はテーパー面210Bを構成している。
【0068】
キャップ本体204の上端部に形成された凹部224にはリング状の形態を有する重り(第2の重り)208が固定配置されている。重り208の内径は、フック218Bの外径よりも大きく、金属部材で構成された2つの重りの直接的な摺動接触が回避されている。これは金属粉(磨耗粉)を防止するためである。この第2の重り208は必要に応じて設けられる。
【0069】
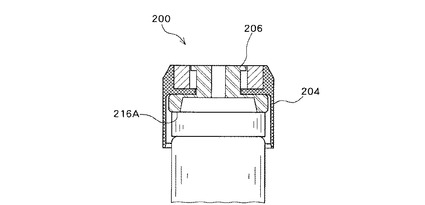
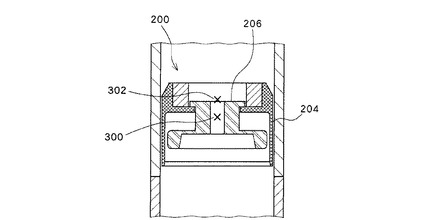
図16には、可動部分としての接触体206が容器202上に載置されて、それが上昇端まで達した状態が示されている。容器202は細径容器であり、その上面が捕獲部分21の凹部内の接触面216Bに密着し、同時に、キャップ部材を支えている。図17には、大径容器に対して載置されたキャップ部材200が示されている。容器の上面は、捕獲部分が有する接触面216Aに密着している。図18には、筒状の案内部材に収容されたキャップ部材200が示されている。例えば、この状態は容器の下方運動時に形成される。キャップ本体204に対して重りとして機能する接触体206がぶら下がった状態にあり、この場合にキャップ部材200の重心は例えば符号300で示す位置となる。一方、接触体206が上昇端にある場合、キャップ部材200の重心は例えば符号302で示す位置となる。
【0070】
仮に接触体206をキャップ本体204に対して固定的に設けた場合、どうしても重心が高めになってしまい、キャップ本体204の下端縁が部材の繋ぎ目に引っ掛かったような場合にキャップ部材200が回転、傾斜して筒状の案内部材の中において途中で引っ掛かってしまうおそれがある。これに対して、本実施形態では、接触体全体が重りとして構成されており、それが押さえ機能を発揮していな状態ではそれは懸下状態におかれ、つまり、重心を下げた状態が形成されるから、キャップ部材の姿勢は安定化され、少々の引っ掛かりが生じても、簡単には引っ掛からなくなる。つまり、正立状態を維持する慣性作用が強化されている。一方、接触体206が容器への接触を開始する時点では、容器の位置や姿勢に合わせて接触体206の位置や姿勢が変化するから、自然な当接状態を形成した上で、それが上昇端に到達した時点では上記の面重合によって当接体の正立状態が形成され、それによって容器の正立状態も形成される。上方への運動時において容器に振動等が伝わっても簡単にはそれが倒れ込むことはなくなる。容器に接触体が載置された状態でそれらが上方へ運動した場合、キャップ本体に及ぶ摩擦力の発生箇所が相対的に見て下方へ変位するから上昇過程においてもキャップ部材の姿勢を安定化することが可能である。
【0071】
なお、接触体を上下方向にのみ運動させることや揺動のみ運動させることも可能である。接触体を固定配置した場合よりも姿勢や位置の自由度を高められる。上記のように第2の重りは必要に応じて設けられる。キャップ本体の下端部に引っ掛かり防止の手段を設けることも可能であり、またその外面に対して低摩擦処理を施すことも可能である。上記実施形態では、複数の容器に対してキャップ部材が兼用されていたが、専用のキャップ部材を利用することも可能である。
【符号の説明】
【0072】
200 キャップ部材、202 容器、204 キャップ本体、206 接触体(可動部分)、208 重り。
【技術分野】
【0001】
本発明はサンプル測定装置に関し、特に、ラックからサンプル容器を測定ユニット内へ送り込んでサンプル中の放射性物質を測定するサンプル測定装置に関する。
【背景技術】
【0002】
サンプル測定装置は、各サンプルに対して放射線測定を行う装置である。サンプル測定装置において、ラックには複数のサンプル容器が保持される。各サンプル容器にはサンプルが収容されており、そのサンプルは、例えば、液体シンチレータが添加された被測定液体である。被測定液体としては、生体から抽出された血液、尿などをあげることができる。もちろん、そのような臨床検査以外のバイオテクノロジー、配水管理など、様々な分野においてサンプル測定装置が用いられる。
【0003】
サンプル測定装置においては、特許文献1、2に記載されているように、ラック上から取り出されたサンプル容器が測定ユニット内に収容され、その状態で、サンプルに含まれる放射性物質が測定される。具体的には、放射線物質から出た放射線が、サンプル中に混入された液体シンチレータを発光させると、その光がサンプル容器外に出て、それが光電子増倍管によって検出される。測定終了後にはサンプル容器がラック上に戻される。そして、これが各サンプル容器ごとに繰り返される。従来装置においては、ラックに保持されたサンプル容器を下から突き上げることによって、サンプル容器が測定ユニット内に送り込まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−75861号公報
【特許文献2】特開平11−311678号公報
【特許文献3】特開2007−278969号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献3に開示されたサンプル測定装置は、昇降対象となるサンプル容器に被せられるキャップ部材を備えている。キャップ部材はサンプル容器の搬送中においてサンプル容器が倒れこむことを防止し、また、サンプル容器が上昇端に到達した場合において筒状部材内へのキャップ部材の嵌り込みによってサンプル容器を位置決め、定位するものである。それはキャップ本体と重りとで構成されている。重りは、キャップ部材の下降時に2つの案内部材の繋ぎ目でキャップ部材が引っ掛かってしまうことを防止するために設けられている。
【0006】
しかし、以上のようなキャップ部材を使用するサンプル測定装置において、キャップ部材の上部に重りを設けてトップヘビーの構成が採用される場合、もしキャップ本体の下端が繋ぎ目に引っ掛かると、そこを回転中心としてキャップ部材が回転運動(倒れ込み運動)する際に重りが回転モーメントを増大させるおそれがある。上記繋ぎ目の個数が増えれば増えるだけその可能性が増大する。サンプル測定装置が通常の状態で使用されている場合に上記のような引っ掛かりが生じないとしても振動等の予想外の外力が働いて引っ掛かりが生じる可能性が大きくなることも予想される。そのような事態を防止してより一層信頼度の高いサンプル測定装置を構成することが要請される。
【0007】
一方、キャップ部材をサンプル容器に載せる際、サンプル容器に対してキャップ部材が自然に密着してサンプル容器の安定正立状態が速やかに形成されるのが望ましい。
【0008】
本発明の目的は、キャップ部材においてその働きを十分に発揮させることが可能な構造を実現することにある。本発明の他の目的はキャップ部材の下降運動時に引っ掛かりが生じないようにすることにある。
【課題を解決するための手段】
【0009】
本発明に係るサンプル測定装置は、放射性サンプルを含む容器が保持されたラックと、前記ラックと測定室との間で前記容器を上下方向に搬送する昇降機構と、前記ラックと前記測定室との間に形成された中空通路内に上下動自在に落とし込まれ、前記昇降機構によって搬送される容器のヘッドに載せられる位置決め用のキャップ部材と、を含み、前記キャップ部材は、前記ヘッドを受け入れる下向きの空洞を有するキャップ本体と、前記キャップ本体によって運動可能に保持され、重りとして機能すると共に前記容器のヘッドに当接して当該容器の位置決めを行う接触体と、を含む。
【0010】
上記構成によれば、容器のヘッド(上部)にキャップ部材が載せられ、昇降機構の昇降台とキャップ部材との間に容器が挟まれた状態が形成され、これによって容器の姿勢安定化つまり位置決めが図られる。キャップ部材は、キャップ本体と、重り且つ押さえとして機能する接触体と、を含んで構成される。接触体はキャップ本体によって運動可能に支持されており、その自然状態ではキャップ本体に対し位置あるいは姿勢の面で一定の自由度がある。しかもそれは重りであるからある程度の重量を備えている。容器が上昇すると、ヘッドに接触体が載せられる。その際、振動等に起因して容器の姿勢に若干ブレがあっても、それに追従したあるいはそのような動きを許容した自然な当接が可能となっている。望ましくは、接触時において、仮に容器に傾きが生じていても、それへの接触体の当接によってその傾きが次第に矯正され、容器の垂直状態が形成される。特に、完全に載置された後においては、その重さによって容器が押さえ付けられるから、その傾斜運動や水平運動は効果的に抑制される。この結果、容器の垂直姿勢を維持したまま容器が測定室へ的確に送り込まれる。自然状態では重りによってキャップ部材の重心が下方へ下げられているから、キャップ部材の下降運動に際してそれ自体の姿勢が安定化される。例えば、キャップ部材の下降運動時にそれが不用意に傾いてしまい経路の途中に引っ掛かってしまう可能性を低減できる。
【0011】
望ましくは、前記接触体は前記容器のヘッドに当接していない初期状態において前記キャップ本体に対して懸下された状態にあり、前記接触体はその下端部を構成する部材であって前記初期状態において前記空洞内で揺動運動可能な捕獲部材を有する。接触体はキャップ本体からぶら下がっており、つまり初期状態では捕獲部材の姿勢あるいは位置に一定の自由度がある。懸下状態では重心位置が下がっているからキャップ部材自身の安定化も図られる。
【0012】
望ましくは、前記接触体は前記キャップ本体に対して上下運動可能に設けられ、前記接触体が前記ヘッドによって突き上げられてそれが上昇端まで達した捕獲状態では前記ヘッド本体によって前記捕獲部材の揺動運動が規制される。容器のヘッドにキャップ部材が完全に載置された状態では、キャップ本体に対して接触体が上昇端に位置し、望ましくは両者の面当たりによって、接触体、特に捕獲部材の動きが規制される。つまり捕獲部材の運動は許されなくなり、それが密着している容器についてもその運動が規制される。その状態では、接触体によって逆にキャップ本体が支持されることになり、つまりキャップ本体が接触体からぶら下がった状態となる。
【0013】
望ましくは、前記捕獲部材は、大径容器のヘッドの上面に当接するリング状の大径当接面と、前記大径当接面の内部であって上方へ窪んだ形態を有し、細径容器ヘッドの上面に当接する小径当接面を有する凹部と、を含む。この構成によれば、少なくとも2種類の径に対応可能である。より多くの径に対応できるように構成してもよい。
【0014】
望ましくは、前記凹部は、前記細径容器のヘッドの角部分に当たるリング状の斜面を有する。このような斜面によって中心位置合わせあるいは位置修正を行える。
【0015】
望ましくは、前記接触体は、前記捕獲部材から上方へ延びる軸部材と、前記軸部材の上端部に形成されたフック部分と、を有し、前記本体は前記軸部材を挿通させた開口部を有する。フック部分は一般には肥大した部分である。望ましくは、前記キャップ本体は、前記空洞部の周囲を構成し、前記中空通路の内面に接触する外側面を有するスカート部と、前記スカート部の天井壁を構成し、前記接触体を運動可能に保持する構造をもった台座と、を含む。
【0016】
上記構成によれば、容器の搬送時において容器の不必要な動き、特に倒れ込みを効果的に防止することができる。振動が生じても容器が飛び跳ねることを抑制可能である。その結果、標準容器に代えて細径容器を搬送することが可能となる。キャップ本体に第2の重りを設けることも可能である。金属材料同士が摺動しないようにそれらの直接接触を回避する構成を採用するのが望ましい。中空通路が中間案内部材と下側案内部材とで構成される場合、それらの隙間で引っ掛かりが生じやすいが、そのような場合であっても上記構成によれば引っ掛かりに起因する詰まり等を効果的に防止できる。少々の引っ掛かりが生じても、それを自然に克服可能である。
【発明の効果】
【0017】
本発明によれば、キャップ部材の働きを十分に発揮させることが可能な構造を実現できる。あるいは、キャップ部材の下降運動時に引っ掛かりが生じないようにすることができる。
【図面の簡単な説明】
【0018】
【図1】一般的なサンプル測定装置の断面図である。
【図2】測定ユニットの斜視図である。
【図3】2つのシャッタ機構の動作を示す図である。
【図4】サンプル測定装置の動作例を説明するためのフローチャートである。
【図5】サンプル測定装置の動作例を説明するためのフローチャートである。
【図6】2つのシャッタ機構の間に容器が位置している状態を示す図である。
【図7】2つのシャッタ機構の動作を示す図である。
【図8】測定室内に容器が位置決めされた状態を示す図である。
【図9】2つのシャッタ機構の動作を示す図である。
【図10】測定中の状態を示す図である。
【図11】測定中の状態を示す図であり、特に一対の反射部材の作用を示す図である。
【図12】容器を測定室から下方へ運動させる過程を示す図である。
【図13】2つのシャッタ機構の間に容器が位置している状態を示す図である。
【図14】本発明に係るサンプル測定装置の実施形態を示す断面図である。
【図15】キャップ部材の断面図である。
【図16】キャップ部材の動作状態(小径容器捕獲状態)を示す断面図である。
【図17】キャップ部材の動作状態(大径容器捕獲状態)を示す断面図である。
【図18】重心位置の移動を説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0020】
最初に、図1乃至図13を用いて特開2007−278969号公報(特許文献3)に開示されたサンプル測定装置について説明した上で、それを基礎として、図14乃至図18を用いて本願における特徴的構成を説明することにする。
【0021】
(1)サンプル測定装置の一般的説明
【0022】
図1はサンプル測定装置における測定部の構成を示す概略的な断面図である。このサンプル測定装置は液体シンチレーションカウンタとして構成されている。もちろん、他の測定装置に本発明を適用することもできる。
【0023】
テーブル10上にはラック12が載置されている。ラック12は図示されていないラック搬送機構によって搬送される。ラック12は複数の収容孔12Aを有しており、各収容孔12Aには容器が収容されている。容器13はサンプル容器であって、試験管あるいはバイアルなどであってもよい。容器13内には液体シンチレータが添加されたサンプル(溶液)が収容されている。ラック12に形成された各収容孔12Aの下部には開口部12Bが形成されており、その開口部12Bを介して後述する押上棒31を進入させ、処理対象となるサンプル容器13を下方から上方へ押し上げることが可能である。
【0024】
押上棒31の上端部の直径は容器13の直径よりも小さい。その上端部の直径をより大きくすることも可能であるが、ラック12や下層構造への衝突、干渉が生じない限りにおいて、上端部を肥大化させる必要がある。上端部が細い場合、容器を下方から突き上げた際に容器の横倒れ等が生じ易くなる。そこで筒状の案内部材や後述するキャップ部材が利用される。
【0025】
図1に示されるサンプル処理装置は、上記のラック搬送機構の他、容器搬送機構14、中継案内機構16、測定ユニット18、下シャッタ機構20及び上シャッタ機構22を有している。測定ユニット18及び中継案内機構16は遮蔽体24内に収容配置されている。具体的には、遮蔽体24は、それぞれ遮光構造をなす上部28及び下部26を有しており、下部26の内部である下部空間26Aには中継案内機構16が設けられており、上部28の内部の空間である上部空間28Aには測定ユニット18が設けられている。ちなみに、遮蔽体24は例えば鉛などの放射線遮蔽部材によって構成されている。上部28と下部26との間には隔壁30が設けられ、下部26の下側には下部壁26Bが設けられている。
【0026】
上記の容器搬送機構14は、容器13を昇降駆動するエレベータ機構である。容器搬送機構14は、上記の押上棒31を有し、押上棒31は具体的には外筒32とその内部に進退可能に設けられた中軸とによって構成されている。中軸の先端はヘッド(上端部)33Aとなっており、そのヘッド33Aによって容器13を下方から上方へ突き上げることが可能である。中軸については後に図6等を用いて説明する。容器搬送機構14はテーブル10内に設けられているが、他の構成を採用することも可能である。
【0027】
上記の中継案内機構16は、ラック12と測定ユニット18との間において容器13を中継的に案内する機構である。中継案内機構16は、昇降自在に設けられた下ガイド(中継案内部材)34を有している。具体的には、下ガイド34はフレーム36によって上下方向に運動可能に保持されており、また下ガイド34は昇降機構38によって上下方向に駆動される。フレーム36の中央部には上下方向に貫通する挿通孔が形成されており、その挿通孔を下ガイド34が通過することになる。
【0028】
昇降機構38は、図1に示される例において、モータ42、第1ピニオン40A、第2ピニオン40B及びベルト44を有している。下ガイド34の所定側面には直線的に形成されたラック34Aが設けられており、第1ピニオン40A及び第2ピニオン40Bはラック34Aと係合する。すなわち、モータ42を正方向あるいは逆方向に回転させると、それに伴ってベルト44の作用により各ピニオン40A,40Bが回転し、それと噛み合っているラック34Aの作用によって下ガイド34が上方向又は下方向に運動する。
【0029】
本実施形態において、下ガイド34は、静電気対策のために、導電性部材によって構成されており、例えばアルミニウムなどによって構成されている。下ガイド34は電気的に接地されている。下ガイド34は中空円筒形状を有しており、その上部及び下部にはそれぞれ開口が形成されている。よって、容器13は下ガイド34を通過することが可能である。下ガイド34の内径は容器13の外形に応じて適切に定められるのが望ましく、少なくとも容器13の外形よりも下ガイド34の内径を大きくし、特に、容器13がぐらつかない程度の内径とするのが望ましい。ただし、容器13としては各種のものが考えられ、容器13の形体に応じて下ガイド34及び後述する内ガイド(上ガイド)60等の形体を適宜定めるのが望ましい。また、複数種類の容器が対象となる場合にはその中で最も大きな容器の直径に適合したガイド部材を採用するのが望ましい。
【0030】
次に、測定ユニット18について説明する。測定ユニット18は容器13が収容される測定室50を有している。具体的には、測定室50はブロック状のフレーム58の内部に形成されており、フレーム58の下部は筒状の形体を有している。測定室50の両側には一対の光検出器である一対の光電子増倍管(PMT)52,54が設けられている。本実施形態において、一対の光電子増倍管52,54はそれぞれの受光面52A,54Aを互いに対向させ、すなわち各受光面52A,54Aが測定室50に臨むように、配置されている。ここで、各受光面52A,54Aは測定室50の内部側へ膨らんだ凸球面形状を有している。ただし、各受光面52A,54Aの形状は平坦であってもよい。各受光面52A,54Aの形態を本実施形態のように凸球面状とすることにより、各受光面52A,54Aの先端部分を容器13により近接させることができ、後述する反射部材72の作用と相俟って、光検出感度を向上することが可能である。
【0031】
測定室50内においては、内ガイド(上ガイド)60が上下動自在に収容されている。内ガイド60は内部案内部材として機能するものである。内ガイド60に対しては独立の駆動源は設けられておらず、後に詳述するように、下ガイド34が上方に運動した場合、その上端部が内ガイド60の下端部を突き上げることにより、当該内ガイド60が上方へ運動する。すなわち、上述した昇降機構38は、下ガイド34の駆動源として機能すると共に、内ガイド60の駆動源としても機能している。このように、単一の昇降機構を2つの駆動手段として利用することにより装置の構造を簡略化することができるという利点がある。
【0032】
図1に示す構成例では、内ガイド60の内部にキャップ部材62が落とし込まれている。キャップ部材の基底位置は図1に示されるように内ガイド60の下端縁レベルである。つまり、キャップ部材62の下端縁が内ガイド60の下端縁にあるストッパ(図示せず)によって支持されている。キャップ部材62は上昇してきた容器13のヘッドを包み込む部材であって、内ガイド60内において上下動自在に設けられており、また内ガイド60の上部開口から更に上方へ上昇して後述するホルダ部材70内に進入する。キャップ部材62は、具体的には、容器13のヘッド部分を包み込む形態をもったキャップ本体64とキャップ本体64に結合した重り66とで構成される。重り66は容器13が最上端の位置から下方に運動する際に、それに伴ってキャップ部材62が円滑に下降するために設けられている。すなわち、ホルダ部材70にキャップ部材62が引っ掛かって落ちて来ない問題を防止するために設けられている。重り66は、図示の例において、キャップ部材の上端部に固定的に設けられている。
【0033】
後に示す実施形態に係るサンプル測定装置においては、キャップ部材が特有の構造を備えている。そして、キャップ部材の基底位置は下ガイドの下端縁となっている。そこにストッパが内向きで形成されている。下ガイドの下降状態ではキャップ部材はラックに保持された測定対象容器に近接あるいは接触する。
【0034】
なお、フレーム58の下端部は上述したように筒状の形態を有し、その内部の円筒形状の空間に内ガイド60が落とし込まれている。内ガイド60の基底位置はフレーム58の下端面に形成されたストッパによって定められる。既に説明したように、キャップ部材62の基底位置は内ガイド60の下端縁に形成されたストッパによって定められている。それらのストッパについては図示省略されている。
【0035】
フレーム58の上端部には円筒形状をもった筒部材68が設けられており、筒部材68はホルダ部材70を上下動自在に保持している。ただし、筒部材68は上記同様のストッパを有しており、ホルダ部材70の基底位置を定める。後に説明するように、キャップ部材62が容器13の上昇に伴って上昇すると、キャップ部材62において先細となった上端部がホルダ70の内部に進入し、両者が嵌合した状態が形成される。その状態から更にキャップ部材62が上昇すると、ホルダ部材70もそれに伴って上昇することになる。ホルダ部材70の内部には上方にかけて先細となった開口部が形成されており、その開口部の斜面がキャップ部材62の上端部に形成された斜面と接合することによって、キャップ部材62の水平方向の位置決めが行われることになる。
【0036】
図2には、図1に示した測定ユニットが斜視図として示されている。フレーム58の下端部58Aは下方に突出しており、その内部には昇降可能に内ガイド60が収容されている。図2に示す例では、内ガイド60内に容器13が部分的に進入している。容器13のヘッドはキャップ部材62によって覆われており、容器13を上方へ運動させると、キャップ部材62もそれに伴って上方へ運動する。また上述したように中継案内部材としての下ガイドを上方へ運動させると、その上端部が内ガイド60の下端部を押し上げ、これによって内ガイド60は上方へ運動することになる。
【0037】
フレーム58には、図においてY方向に一対の開口部58Bが形成されている。各開口部58Bには光電子増倍管の受光面の縁部分が接続される。図2においてはそれらの光電子増倍管については図示省略されている。ホルダ部材70は上述したようにその内部が開口部となっており、その開口部にはテーパー面としての斜面70Bが形成されている。またその下方にはストレート面70Aが形成されている。測定室内には、そこに収容される容器13の近傍であって一対の受光面の間に、一対の反射部材72が配置されている。この反射部材72は第1反射面72A及び第2反射面72Bを有しており、容器13から両側へ放出された光が各反射面72A,72Bによって反射され、それが一対の受光面に導かれる。これによって光検出感度を極めて向上することが可能である。
【0038】
内ガイド60には、その中間部分から上方にかけて一対のU字溝60Aが形成されている。より具体的には、Y方向の両側に一対のU字溝60Aが形成され、それらの内部はU字型開口74を構成している。また、内ガイド60における中間部分から上方にかけて、X方向の両側に一対のU字溝60Bが形成されている。各U字溝60Bはその内部がU字型開口76を構成している。U字溝60AとU字溝60Bとの間の残留部分は突出部60Cとなっている。
【0039】
内ガイド60を上方へ運動させると、膨らみをもった一対の受光面が内ガイド60に衝突する可能性があるが、本実施形態においては一対のU字溝60Aが形成されているため、各受光面の先端部分は各開口74内に非接触で進入する。すなわち、各受光面への物理的な接触が防止されている。これにより、結果として、各受光面を、測定室内に位置決めされた容器13に近接させることが可能となる。また、内ガイド60を上方に運動させた場合、一対の反射部材72における中央の突出した部分が各開口76内に非接触で進入することになる。その結果、各反射部材72への物理的な接触が防止されている。これにより、各反射部材72を、測定室内に収容された容器13に近接させることが可能である。
【0040】
後に説明するように、内ガイド60は、容器13を測定室へ送り込む際に容器13を包み込む作用を発揮する。すなわち、容器13の上昇と共に、内ガイド60も上昇することになり、容器13が倒れたりあるいはぐらついたりするような場合でも内ガイド60によってそのような動きを一定範囲内に制限して、容器13が測定室の内部に存在する各部材に直接的に接触することを防止できる。これによって、容器13あるいは測定室内の部材の物理的保護を図ることができると共に、結果として、各受光面等を容器13へ近接する配置を許容できることになる。
【0041】
測定中においては、容器13のヘッドを保持したキャップ部材62とそれを保持するホルダ部材70との作用により、容器13の水平方向の位置決めが行えるため、容器13がぐらついたりすることはない。すなわち、測定中においては、上昇した内ガイド60が一旦下方の待機位置へ引き下げられる。これによって内ガイド60が存在することに起因する測定効率の低下といった問題を未然に防止することが可能である。もちろん、開口74,76を大開口として形成することにより、測定中においても内ガイド60を測定室内に残留させることが可能である。
【0042】
内ガイド60は静電気対策のために導電性をもった樹脂部材等で構成するのが望ましい。上記の下ガイド34と同様に内ガイド60についても電気的に接地しておくのが望ましい。これに関しては後に詳述する。なお、図2において符号78は外部線源を挿入するための挿入孔を表している。そのような外部線源は測定ユニットを校正するような場合に用いられる。
【0043】
図1に示した下シャッタ機構20及び上シャッタ機構22はラック12から測定室50までの容器の搬送通路上において、特に、中間ユニットとしての中継案内機構16(及び下部26)の下部開口から測定室50(及び隔壁30)の受入開口までの間で、光遮蔽作用を発揮するものである。それぞれのシャッタ機構20,22は例えば開閉運動する複数のブレードを有しており、それらの複数のブレードによって搬送通路を閉じたり開いたりすることが可能である。本実施形態においては、後に詳述するように、少なくとも一方のシャッタ機構20,22が常に閉状態となるように制御されており、これによって測定室50内部への外来光の進入が確実に阻止されている。従来においては、1つのシャッタ機構のみが設けられており、そのシャッタ機構が開状態となる場合には、光電子増倍管を停止させたりあるいはその駆動電圧を引き下げたりする必要があったが、本実施形態においては各光電子増倍管の駆動電圧をそのまま維持することが可能である。これによって各光電子増倍管の動作の安定化を図ることができる。
【0044】
図1は、ラック12に収容された容器13を測定室50内に送り込む初期段階を示しており、図示されるように下ガイド34が最下位置(受入位置)まで下降している。このような状態においては、図3に示されるように、下シャッタ機構20が開状態であり、上シャッタ機構22が閉状態となる。下シャッタ機構20は、上述したようにブレード80,82を有しており、それらは軸84,86を中心に回転運動を行う。各ブレード80,82には、U字型をした溝80A,82Aが形成されており、一対のブレード80,82を閉動作させると一対の溝80A,82Aが互いに近接運動し、その結果として上述した押上棒における外筒32(図1)を挟み込むことができる。すなわち外筒32の周囲を光学的に遮蔽することが可能である。上シャッタ機構22は、一対のブレード88,90を有しており、それらは軸92,94を中心として開閉運動を行う。上シャッタ機構22においては、下シャッタ機構20において説明したような溝は設けられていない。
【0045】
図1において、上述した中継案内部材としての下ガイド34は、ラック12から容器13を測定室50へ上昇運動させる場合において、特に、ラック12と測定ユニット18との間の中間的な経路において、容器13が不必要に構造体に衝突してしまうことを防止する作用を発揮する。すなわち、容器13を押上棒31によって単純に下から突き上げると、容器13は水平方向に倒れ込む可能性があり、場合によっては容器13の肩部が遮蔽体24に衝突したりあるいはそのようなことを原因として容器30を破損させたりしてしまう問題が生じ得る。そこで、本実施形態においては、そのような中間的な経路において上下運動する下ガイド34を設けたので、容器13の上昇に伴って下ガイド34を上昇させ、また、容器13の下降に伴って下ガイド34を下降させることにより、下ガイド34内に容器13を収容して容器13が他の部材と直接的に接触することを効果的に防止することができる。下ガイド34の上下方向の長さは、少なくとも容器13を収容する大きさとされており、また下シャッタ機構20と上シャッタ機構22の間の空間に収まる長さとして定められている。これにより、2つのシャッタ機構20,22の間に容器13を収容して下ガイド34を位置決めした状態で2つのシャッタ機構20,22を共に閉状態とすることが可能となる。つまり一方のシャッタ機構を開状態とする前の状態を形成することが可能となる。
【0046】
次に、図4及び図5を用いて上記のサンプル測定装置の動作の一例を説明する。図4及び図5において、(A)は図1に示した押上棒31を有する容器搬送機構14の動作を表しており、(B)は図1に示した中継案内機構16の動作を表しており、(C)は図1に示した下シャッタ機構20の動作を表しており、(D)は上述した上シャッタ機構22の動作を表しており、(E)は図1に示した測定ユニット18の動作を表している。
【0047】
S101においては、次のような状態が構築される。すなわち、押上棒31は最下位置に位置決めされ、下シャッタ機構20は開状態とされ、上シャッタ機構22は閉状態とされ、測定ユニット50においては内ガイド60が基底状態とされる。これが初期状態となる。S102においては、図1に示したように、下ガイド34がラック12方向に引き下げられ、下ガイド34が最下位置へ位置決めされる。
【0048】
S103においては、押上棒31が上方へ駆動され、これによって対象となる容器13が上方に上昇する。これと連動して下ガイド34も上方に駆動される。この場合において、容器13の上昇速度と下ガイド34の上昇速度はそれぞれ独立に定めることができ、それらは同一であってもよいし、互いに異なるものであってもよい。また上昇の開始タイミングについてもそれぞれ独立に定めることが可能である。一般的には、図1に示すように、最下位置にある下ガイド34内に容器13が完全に収容された時点をもって容器13と一緒に下ガイド34を上方へ上昇させるようにするのが望ましい。
【0049】
S104においては、図6に示すように、下シャッタ機構20と上シャッタ機構22との間の中間的な経路に容器13及び下ガイド34が進入した時点をもって、図1に示した押上棒31及び下ガイド34の上昇が停止する。具体的には、外筒32の先端部が前記中間的な経路内に進入した時点で、外筒32及び中軸33の上昇が停止する。この場合、外筒32の停止に遅れて中軸33を停止させてもよい。外筒32の先端部の構造については後に図14を用いて説明する。中軸33の上昇停止と共に下ガイド34の上昇もいったん停止する。S105では、図7に示すように下シャッタ機構22が閉動作する。これにより測定室から見て二重遮光状態が形成される。
【0050】
その後のS106では、上シャッタ機構22だけが開動作し(図9参照)、更にS107においては、押上棒21の内で中軸33だけが上昇して、それに伴い下ガイド34が上昇し、更に、以下に図8を用いて説明するように、下ガイド34の上端部が内ガイド60の下端部に当接し、内ガイド60を上方に押し上げる。すなわち、測定ユニット18内において測定室50に向かって内ガイド60が上昇する。ここで、S104〜S107で、容器13の上昇過程において、下シャッタ機構20と上シャッタ機構22との間の中間的な経路に容器13及び下ガイド34が進入した時点で、押上棒31及び下ガイド34の上昇を停止させずに、下シャッタ機構20を自動的に閉動作させ、下シャッタ機構20の閉動作後、上シャッタ機構22を自動的に開動作するようにしてもよい。
【0051】
S108においては、容器13が上昇端に位置した場合に容器13の上昇が停止し、これによって容器13が測定室50内における測定位置に位置決めされることになる。ちなみに、その測定位置は容器13内に含まれている液量などによって適宜定めることが可能であり、また容器の形態などに応じて適宜定めるのが望ましい。
【0052】
また、S108においては、容器13の上昇停止と同時に、またはそれに前後して図8に示されるように、下ガイド34の上昇が停止し、これに伴い内ガイド60の上昇も停止する。すなわち内ガイド60が最上位置に一旦位置決めされることになる。ちなみに、測定ユニット18内においては、容器13の上昇に伴って、容器13のヘッドにキャップ部材62が係合し、そのキャップ部材62が上昇運動すると、キャップ部材62がホルダ部材70内に収容されることになる。そして容器13の上昇に伴い、キャップ部材62及びホルダ部材70が上昇運動し、容器13の上昇が停止した時点でそれらの部材62,70の上昇運動も停止する。その状態では、キャップ部材62及びホルダ部材70によって容器13の水平方向の位置が適正に維持されることになる。
【0053】
S109では、容器13の位置決めが完了した後、下ガイド34が下降運動する。これに伴って内ガイド60も下降運動する。そして、下ガイド34及び内ガイド60は待機位置(退避位置)に向かうことになる。すなわち測定室50内に内ガイド60をそのまま残留させると、それによる光遮蔽作用が無視できないことから、内ガイド60を下方に引き出して測定感度の向上を図るものである。S110においては、上述したように下ガイド34及び上ガイド60の下降が停止され、それが待機位置に位置決めされる。
【0054】
S111においてはサンプルに含まれる放射性物質の測定が所定時間実行される。その状態が図10及び図11に示されている。図11においては、各反射部材72が上方から見て二等辺三角形の断面を有する部材として示されている。容器13に対してはそれぞれの光電子増倍管52,54の受光面が近接しており、また図11に示されるように、一対の反射部材72の作用によって、容器13の左右方向(すなわちX方向)に放射された光がそれらの反射部材72によって反射されて各受光面52A,54Aに導かれている。これによって従来よりも測定感度を著しく向上することが可能となる。上述したように、キャップ部材62及びホルダ部材70の作用によって容器13の位置は維持されており、内ガイド60が測定室内に存在していなくても容器13に対して周囲の部材が接触することはない。
【0055】
図5に移って、測定終了後のS112においては、待機位置にある下ガイド34が上方へ駆動され、これに伴い内ガイド60も上方へ駆動されることになる。S113では下ガイド34の上昇が停止され、これに伴い内ガイド60も測定室50内において、適正に位置決めされる。すなわち、内ガイド60の内部に容器13を再度収容した状態が形成される。
【0056】
S114においては、中軸33を下降させることにより、容器13が下降運動する。その状態が図12に示されており、容器13の下降に伴い、下ガイド34も下方へ駆動され、それと一緒に内ガイド60も下降運動する。そして、S115においては下ガイド34の上に載せられていた内ガイド60がストッパによって保持されることになり、すなわち内ガイド60が下ガイド34から分離した状態となる。その状態では内ガイド60は基底状態に位置決めされる。
【0057】
S116において、図13に示すように、下シャッタ機構20と上シャッタ機構22との間に下ガイド34及び容器13が収容され、中軸33が外筒32内に完全に収容された時点をもって、押上棒31の中軸33及び下ガイド34の下降が停止する。そして、S117では、上シャッタ機構22が閉動作する。S118では、下シャッタ機構20が開動作する。そして、S119においては押上棒31の全体が下降し、それに伴い、下ガイド34も下降する。ここで、S116〜S118で、容器13の下降過程において、下シャッタ機構20と上シャッタ機構22との間に容器13及び下ガイド34が進入した時点で、押上棒31の中軸33及び下ガイド34の下降を停止させずに、上シャッタ機構22を自動的に閉動作させ、上シャッタ機構22の閉動作後、下シャッタ機構20を自動的に開動作するようにしてもよい。
【0058】
S120においては、下ガイド34が下方端に到達した時点でその運動が停止する。S121においては、容器13がラック12上に戻される。そのような段階において、必要であれば、下ガイド34が上昇駆動されて次の容器を受け入れるために待機位置へ位置決めされる。S122では、押上棒31の下降が完全に停止する。その後、S101の工程へ戻って、次の容器に対する処理が繰り返される。
【0059】
上記構成によれば、測定中においてキャップ部材62等によって容器13の位置決めを図ることができるので、容器13の側面が不必要に受光面に接触して受光面を傷つけてしまうことを未然に防止することができる。このことは結果として受光面を容器13により近接することが可能であるということを意味する。またキャップ部材62によって容器13の昇降運動時においても容器13を位置決め保持を行える。キャップ部材62に除電部材が設けられてもよい。ちなみに、筒状部材は銅などの金属によって構成され、その内部に上下動自在に設けられるホルダ部材は樹脂などによって構成される。
【0060】
(2)本実施形態に係るサンプル測定装置の説明
【0061】
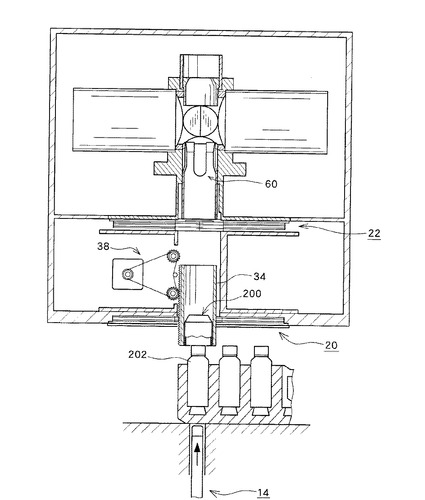
図14には、本実施形態に係るサンプル測定装置の構成が断面図として示されている。なお、図1に示した構成についてはその説明を省略し、以下においては、図1に示されていない構成を中心に説明を行う。
【0062】
図14に示す構成では、下ガイド34の中にキャップ部材200が落とし込まれている。キャップ部材200は、下ガイド34及び内ガイド60の両者に跨って運動することが可能である。内ガイド60の下端縁にキャップ部材200用のストッパは形成されておらず、それは下ガイド34の下端縁に形成されている。それが下ガイド34の途中に形成されてもよい。容器202の上昇運動に先立って、下ガイド34が容器202に近付けられ、あるいは、それを部分的に収容し、その際において、キャップ部材200が容器202に近付けられ、あるいは、それに接触する。
【0063】
容器200の上昇前にあるいは上昇開始後間もなくして容器202のヘッドにはキャップ部材200が載せられることになる。そして、両者が一体化された状態のまま両者が上方へ引き上げられる。測定終了後においては、キャップ部材200が容器202に載せられたまま、容器200が下降へ引き下ろされ、その際において、キャップ部材200は下ガイド34の規定位置まで落とし込まれる。キャップ部材200は、下ガイド34と内ガイド60の中をそれらの動きに合わせて移動することになる。キャップ部材200は、従来のキャップ部材と同様に測定時における位置決め保持の作用を発揮する。キャップ部材が容器202の上昇過程の早い段階で容器202に載置され、その状態では容器202の姿勢の安定化、位置決めが図られる。容器202の搬送過程ではその垂直姿勢が維持される。つまり、不用意な倒れ込みが防止される。
【0064】
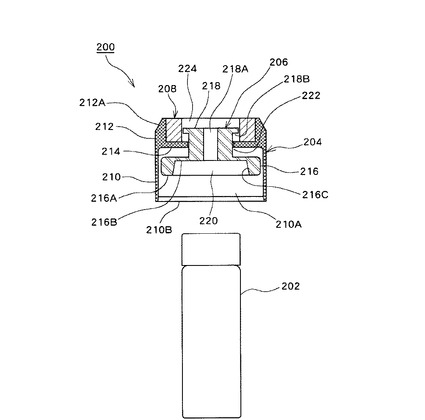
図15には、キャップ部材200の拡大断面図が示されている。キャップ部材200は、枠体をなすキャップ本体204とキャップ本体204に対して相対運動可能な接触体206とを有する。キャップ本体204は、硬質樹脂等によって構成され、それは、筒状を有するスカート部210と、その上部をなす上端部212と、を有する。上端部212は、上方に開いた凹部224を有し、また、凹部224の底面壁あるいは空洞部210Bの天井壁を構成する水平台座214を有する。水平台座214の中央部には上下に貫通した円形の開口部222が形成されている。接触体206は、水平方向に広がった捕獲部分216及びその上面中央部から上方へ伸長した軸部218を有し、軸部218の上端が水平方向に張り出ており、それがフック218Bを構成している。それは開口部222のサイズよりも大きく、フック222は接触体206の自由懸下状態で開口部に引っ掛かる。図15においては、説明のため、接触体206が上方にやや浮上している状態が示されている。
【0065】
捕獲部分216は、空洞部210Aの中に位置し、その水平運動あるいは揺動運動が許容されている。すなわち、キャップ本体204に対して接触体206特に捕獲部分216がぶら下がった状態におかれている。捕獲部分216は、容器上面(容器ヘッド上面)への当接時に姿勢変更可能な状態におかれており、面重合状態を早々に形成可能である。捕獲部分216は、下方に向いた凹部220を有し、その中には天井面として構成される円形の当接面210Bが存在する。凹部220の周囲は下方に突き出たリング状の部分を構成しており、その下面はリング状の当接面216Aを構成している。それらは自然状態あるいは懸下状態において水平面をなす。凹部220の側面210Aは斜面(テーパー面)を構成しており、キャップ部材200の装着時に容器の角部分(エッジが)が側面210Aに当たると、その容器に対して中心方向へ復帰力が生じる。容器の倒れ込み運動は、容器の上面と当接面216Bとの面重合によって規制される。その面重合状態の初期において仮に容器及び接触体206が傾斜姿勢となっても、キャップ部材200が容器に完全に載置されるに至った状態では、捕獲部分216が上昇端へ到達し、捕獲部分216の上面と水平台座214の下面とが完全に密着して、接触体206が完全に起立状態(正立状態)となるから、容器の傾斜姿勢は自然に解消されて、それは正立姿勢となる。軸部分218の長さ、特に、捕獲部材216の上面とフック222との間の距離が接触体206の上下方向のストロークを規定する。また、開口部222の直径と軸部分218の直径との差が接触体206の姿勢変化の幅を規定する。軸部分206の中心には貫通孔218Aが形成されている。それは必要に応じて空気抜き孔として機能する。
【0066】
上記のように捕獲部分216には2つの当接面216A,216Bが形成されており、それらによって少なくとも2種類の容器(大径で背の低い容器、小径で背の高い容器)に対応可能である。その構造及び形態を工夫することにより、様々な容器に対応することが可能である。なお、捕獲部分216が運動してもそれがキャップ本体204に接触することはない。但し、キャップ本体204によってその運動が規制されてもよい。
【0067】
接触体206は、ステンレス、真鍮等の金属によって形成されており、キャップ部材200は重りとして機能と容器押さえとしての機能とを発揮する。図15に示されるように、接触体206においてその下端部を構成する捕獲部分が肥大しており、接触体206それ自体の重心位置がかなり下がっており、接触体206を含むキャップ部材220全体としても重心位置がかなり下がっている。接触体206の懸下状態の他、接触体206が上昇端にあっても、キャップ部材200それ全体としての重心は比較的低い位置にある。もっとも、接触体206が上昇端にあるということはそれが完全に容器上に載置されたということを意味するから、その状態では、逆に接触体206に対してキャップ本体204がぶら下がった状態となる。キャップ本体204の上端部における角部分は斜めに切り取られており、上方に向かって先細形状が構成されている。空洞部210Aの周囲をなす内側面の下端部分はテーパー面210Bを構成している。
【0068】
キャップ本体204の上端部に形成された凹部224にはリング状の形態を有する重り(第2の重り)208が固定配置されている。重り208の内径は、フック218Bの外径よりも大きく、金属部材で構成された2つの重りの直接的な摺動接触が回避されている。これは金属粉(磨耗粉)を防止するためである。この第2の重り208は必要に応じて設けられる。
【0069】
図16には、可動部分としての接触体206が容器202上に載置されて、それが上昇端まで達した状態が示されている。容器202は細径容器であり、その上面が捕獲部分21の凹部内の接触面216Bに密着し、同時に、キャップ部材を支えている。図17には、大径容器に対して載置されたキャップ部材200が示されている。容器の上面は、捕獲部分が有する接触面216Aに密着している。図18には、筒状の案内部材に収容されたキャップ部材200が示されている。例えば、この状態は容器の下方運動時に形成される。キャップ本体204に対して重りとして機能する接触体206がぶら下がった状態にあり、この場合にキャップ部材200の重心は例えば符号300で示す位置となる。一方、接触体206が上昇端にある場合、キャップ部材200の重心は例えば符号302で示す位置となる。
【0070】
仮に接触体206をキャップ本体204に対して固定的に設けた場合、どうしても重心が高めになってしまい、キャップ本体204の下端縁が部材の繋ぎ目に引っ掛かったような場合にキャップ部材200が回転、傾斜して筒状の案内部材の中において途中で引っ掛かってしまうおそれがある。これに対して、本実施形態では、接触体全体が重りとして構成されており、それが押さえ機能を発揮していな状態ではそれは懸下状態におかれ、つまり、重心を下げた状態が形成されるから、キャップ部材の姿勢は安定化され、少々の引っ掛かりが生じても、簡単には引っ掛からなくなる。つまり、正立状態を維持する慣性作用が強化されている。一方、接触体206が容器への接触を開始する時点では、容器の位置や姿勢に合わせて接触体206の位置や姿勢が変化するから、自然な当接状態を形成した上で、それが上昇端に到達した時点では上記の面重合によって当接体の正立状態が形成され、それによって容器の正立状態も形成される。上方への運動時において容器に振動等が伝わっても簡単にはそれが倒れ込むことはなくなる。容器に接触体が載置された状態でそれらが上方へ運動した場合、キャップ本体に及ぶ摩擦力の発生箇所が相対的に見て下方へ変位するから上昇過程においてもキャップ部材の姿勢を安定化することが可能である。
【0071】
なお、接触体を上下方向にのみ運動させることや揺動のみ運動させることも可能である。接触体を固定配置した場合よりも姿勢や位置の自由度を高められる。上記のように第2の重りは必要に応じて設けられる。キャップ本体の下端部に引っ掛かり防止の手段を設けることも可能であり、またその外面に対して低摩擦処理を施すことも可能である。上記実施形態では、複数の容器に対してキャップ部材が兼用されていたが、専用のキャップ部材を利用することも可能である。
【符号の説明】
【0072】
200 キャップ部材、202 容器、204 キャップ本体、206 接触体(可動部分)、208 重り。
【特許請求の範囲】
【請求項1】
放射性サンプルを含む容器が保持されたラックと、
前記ラックと測定室との間で前記容器を上下方向に搬送する昇降機構と、
前記ラックと前記測定室との間に形成された中空通路内に上下動自在に落とし込まれ、前記昇降機構によって搬送される容器のヘッドに載せられる位置決め用のキャップ部材と、
を含み、
前記キャップ部材は、
前記ヘッドを受け入れる下向きの空洞を有するキャップ本体と、
前記キャップ本体によって運動可能に保持され、重りとして機能すると共に前記容器のヘッドに当接して当該容器の位置決めを行う接触体と、
を含むことを特徴とするサンプル測定装置。
【請求項2】
請求項1記載の装置において、
前記接触体は前記容器のヘッドに当接していない初期状態において前記本体に対して懸下された状態にあり、
前記接触体はその下端部を構成する部材であって前記初期状態において前記空洞内で揺動運動可能な捕獲部材を有する、
ことを特徴とするサンプル測定装置。
【請求項3】
請求項2記載の装置において、
前記接触体は前記キャップ本体に対して上下運動可能に設けられ、
前記接触体が前記ヘッドによって突き上げられてそれが上昇端まで達した捕獲状態では前記ヘッド本体によって前記捕獲部材の揺動運動が規制される、ことを特徴とするサンプル測定装置。
【請求項4】
請求項2又は3記載の装置において、
前記捕獲部材は、
大径容器のヘッドの上面に当接するリング状の大径当接面と、
前記大径当接面の内部であって上方へ窪んだ形態を有し、細径容器ヘッドの上面に当接する小径当接面を有する凹部と、
を含むことを特徴とするサンプル測定装置。
【請求項5】
請求項4記載の装置において、
前記凹部は、前記細径容器のヘッドの角部分に当たるリング状の斜面を有する、
ことを特徴とするサンプル測定装置。
【請求項6】
請求項3記載の装置において、
前記接触体は、
前記捕獲部材から上方へ延びる軸部材と、
前記軸部材の上端部に形成されたフック部分と、
を有し、
前記本体は前記軸部材を挿通させた開口部を有する、
ことを特徴とするサンプル測定装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の装置において、
前記キャップ本体は、
前記空洞部の周囲を構成し、前記中空通路の内面に接触する外側面を有するスカート部と、
前記スカート部の天井壁を構成し、前記接触体を運動可能に保持する構造をもった台座と、
を含むことを特徴とするサンプル測定装置。
【請求項1】
放射性サンプルを含む容器が保持されたラックと、
前記ラックと測定室との間で前記容器を上下方向に搬送する昇降機構と、
前記ラックと前記測定室との間に形成された中空通路内に上下動自在に落とし込まれ、前記昇降機構によって搬送される容器のヘッドに載せられる位置決め用のキャップ部材と、
を含み、
前記キャップ部材は、
前記ヘッドを受け入れる下向きの空洞を有するキャップ本体と、
前記キャップ本体によって運動可能に保持され、重りとして機能すると共に前記容器のヘッドに当接して当該容器の位置決めを行う接触体と、
を含むことを特徴とするサンプル測定装置。
【請求項2】
請求項1記載の装置において、
前記接触体は前記容器のヘッドに当接していない初期状態において前記本体に対して懸下された状態にあり、
前記接触体はその下端部を構成する部材であって前記初期状態において前記空洞内で揺動運動可能な捕獲部材を有する、
ことを特徴とするサンプル測定装置。
【請求項3】
請求項2記載の装置において、
前記接触体は前記キャップ本体に対して上下運動可能に設けられ、
前記接触体が前記ヘッドによって突き上げられてそれが上昇端まで達した捕獲状態では前記ヘッド本体によって前記捕獲部材の揺動運動が規制される、ことを特徴とするサンプル測定装置。
【請求項4】
請求項2又は3記載の装置において、
前記捕獲部材は、
大径容器のヘッドの上面に当接するリング状の大径当接面と、
前記大径当接面の内部であって上方へ窪んだ形態を有し、細径容器ヘッドの上面に当接する小径当接面を有する凹部と、
を含むことを特徴とするサンプル測定装置。
【請求項5】
請求項4記載の装置において、
前記凹部は、前記細径容器のヘッドの角部分に当たるリング状の斜面を有する、
ことを特徴とするサンプル測定装置。
【請求項6】
請求項3記載の装置において、
前記接触体は、
前記捕獲部材から上方へ延びる軸部材と、
前記軸部材の上端部に形成されたフック部分と、
を有し、
前記本体は前記軸部材を挿通させた開口部を有する、
ことを特徴とするサンプル測定装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の装置において、
前記キャップ本体は、
前記空洞部の周囲を構成し、前記中空通路の内面に接触する外側面を有するスカート部と、
前記スカート部の天井壁を構成し、前記接触体を運動可能に保持する構造をもった台座と、
を含むことを特徴とするサンプル測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−11499(P2013−11499A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143832(P2011−143832)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
[ Back to top ]