
サンプル管ラックの取扱方法およびその実験室システム
【課題】サンプル管ラックを取り扱うための方法および実験室システムを開示する。
【解決手段】該実験室システムは、複数の収納ラックSRを収納するための複数の棚を持った収納部分と、該収納ラックSRからサンプル管を処分するための廃棄ユニットと、該収納部分中に、収納ラックSRを搭載するための、該収納部分から収納ラックSRを取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニットに持ってくるためのロボット移送システム510とを含む。
【解決手段】該実験室システムは、複数の収納ラックSRを収納するための複数の棚を持った収納部分と、該収納ラックSRからサンプル管を処分するための廃棄ユニットと、該収納部分中に、収納ラックSRを搭載するための、該収納部分から収納ラックSRを取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニットに持ってくるためのロボット移送システム510とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、テスト実験室環境におけるサンプル管ラックの取扱に関するものであり、特に貯蔵区画におけるサンプル管を貯蔵との関連で、サンプル管ラックの取扱用の実験室装置に関するものである。さらに詳細には、本発明は、管同定自動化システムに関するものである。
【背景技術】
【0002】
たとえば、患者のサンプルを検査しかつ種々の生体外診断テストを行う臨床実験室などの実験室においては、(血液、尿などの)サンプルを含むテスト管を、多数かつ注意深く効率的に取り扱わねばならない。この数年の間に、対応するシステムおよび装置を備えた自動化手法が、この技術に使用されている。
【0003】
これらのサンプル管の取扱時の1つの態様は、たとえば冷蔵装置でありうる収納用仕切りに置かれる管に関するものである。効率的な取扱目的のためには、これらの管を、個別に取扱うのではなくて、いわゆるラック中に置くことである。通常、管を特定の収納ラック中に置き、この収納ラックを、収納装置中の棚などの収納仕切り中に、所定の時間の間置くことになる。この時間枠の間に、さらなる分析用の要望に応えて、たとえば(そのラック中に含まれている)サンプル管を送るために、ラック取扱装置により、ラックを取り出し、またその後、収納用に元に戻されなければならない。
【0004】
欧州特許第1441026号明細書には、制御された気候条件を持ったキャビネットおよび内部にサンプルを収納するための環状ホルダーを有する収納システムが、開示されている。サンプルホルダー内にサンプルを載せたりまたは降ろしたりする機構を持った自動移送システムが、サンプルを動かす。積載/荷降ろし機構および/またはサンプルホルダーが、中心軸の周りに回転する。垂直リフトカラム、および上部の覆いにあるロックを経由してリフト台車において相対的に垂直移動する移送ガイドを持った伸縮自由なメカニズムにより、サンプルが、組立部の上部で挿入されかつ取り除かれる。
【0005】
米国特許第6129428号明細書には、回転ラックでありまた目的物運搬器中の目的物を保持する目的物収納装置が開示されている。目的物は、目的物収納装置の構造上にのみ存在し、かつ持ち上げが可能である。該収納台は、回転ラック状目的物収納装置と、回転ラック状目的物収納装置の軸に対して平行にまた垂直に、目的物運搬器を移動させる目的物運搬器保持するための素子を持った移送装置とを持っている。気候テストキャビネットは、窓と、その内側に目的物収納装置と移送装置からなる収納台とを持っており、それは、目的物収納装置と窓の近辺の間に、目的物キャリヤの1つを、同時に前後に移送させる。
【0006】
米国特許第6478524号明細書には、収納配置が、互いのトップに配置された、いくつかの収納スペースを含む少なくとも1つの収納軸を持った収納装置と、目的物の短期での受け取り用の配送装置とを持っていることを特徴とする収納配置と目的物用収納容器とが、開示されている。さらに、該収納配置は、目的物キャリヤを持った移送装置を持っており、また垂直置換装置と、水平回転装置と、目的物キャリヤを、配送装置と収納スペースの間に置き換えるための水平置換装置とを持っている。該目的物は、垂直線に対して常に同一角をとり、そこでは、目的物の基準表面が、水平に配向されていることが好ましい。該収納容器は、収納キャビネットと、統合された収納配置から成っている。該収納キャビネットは、ロック窓開口部を持っており、その寸法は、目的物の寸法に対応している。該配送装置は、収納キャビネットの外側に置かれている。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、請求項11および請求項12それぞれに記載の特徴を持った方法のみならず、請求項1記載の特徴を持ったサンプル管ラックを取扱うための実験室システムを提供する。
【課題を解決するための手段】
【0008】
本発明によると、実験室サンプル管ラックの取扱用実験室システムは、複数の収納ラックを収納するための複数の棚を持った収納部分と、該収納ラックからサンプル管を処分するための廃棄ユニットと、該収納部分中に、収納ラックを搭載するための、該収納部分から収納ラックを取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニットに持ってくるためのロボット移送システムから成っている。好ましい実施形態によると、該搬送システムは、搬送される収納ラックと連結するための連結素子を含み、該連結素子は、そこに連結されるときに、収納ラック上に、押し/引き力を移す。さらに、該移送システムは、移送される収納ラックを運ぶための台を含み、該台は、高さ調整装置に、操作可能に接続されている。収納ラックが、収納位置から該台上に、たとえば、収納装置中の棚上に引かれる場合には、該高さ調整装置が、ラックが引かれる収納位置の水準よりわずかに下に、該台を引き下げる。収納ラックが、収納位置にある台から、たとえば、収納装置中の棚上に引かれる場合には、該高さ調整装置が、収納ラックが押し込まれる収納位置の水準よりわずかに上に、該台を引き上げる。
【0009】
本発明によれば、収納搬送台のレベルは、収納ラックを取り扱う方向により調整され、該収納ラックの適当な挿入および引き戻し/回復が、可能になる。
【0010】
さらに、本発明は、収納の所定制限時間の終了後に実験室サンプル管を取り扱うための実験室システムを提供する。好ましい実施態様によると、該廃棄ユニットは、廃棄容器上に置かれたラック停止位置を持った傾斜モジュールを含んでいる。傾斜モジュールは、該ラック中に含まれるサンプル管が廃棄容器中に下へ落ちるように、移送システムによってラックと共に搭載されるときに、該ラック停止位置を越えて傾くように設計されている。
【0011】
本発明によると、廃棄されるラック含有サンプル管は、該傾斜モジュール中に置かれる。該ラック停止位置の傾斜に続いて、該サンプル管は、重力により該ラックから下の廃棄容器中へ落ち込む。このことにより、管の自動廃棄が可能になり、該廃棄容器へ管が次に落ち込まないことが確かなものとなる。落下サンプルを、廃棄容器中に導くために、該傾斜モジュールと該廃棄容器の間に、偏向板または邪魔板を置いてもよい。該ラックが空になった後、それは、通常の(非傾斜)位置中に戻され、該移送システムによって取り出される。引っ込める間に、ラック中に管が残留しているかどうかを、センサーが検出する。該傾斜モジュールに対して該移送システムにより行われる該配送/取り出し機構は、収納位置に対して行われる機構と同一または類似している。
【0012】
さらなる特徴および実施形態は、以下の説明および添付の図面から明確になる。
【0013】
本開示の範囲から逸脱しないで、上述した特徴および以後記述するものは、特定の組み合わせで使用できるだけでなく、他の組み合わせまたはそれら自体に基づいて使用できることは、理解される。本発明の開示は、開示された装置およびシステムの操作の対応する方法をもカバーし、かつ本説明は、コンピュータプログラムが、コンピュータまたは制御ユニット上で動く時、本発明の方法を行うために適したプログラムコード化手段を持ったコンピュータプログラムをもカバーしている。コンピュータ可読の媒体上に収納されるのみならず、コンピュータプログラムそれ自体が主張される。
【0014】
種々の実装の一例を、実施形態による図面中で、概略的に説明し、また以後、図面を参照して詳細に説明する。説明は、決して本開示の範囲に限定するものではなく、また好ましい実施形態の説明である。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明の実験室システムからなる実験室装置ユニットの透視図を示している。
【図2】図2は、来入第1ラックが取り扱われる本発明の実験室システムの第1ラック搬送領域上への平面図を示している。
【図3】図3は、本発明による手段行使台の平面図を示している。
【図4】図4は、図3の手段行使台の収納ラック結合素子の平面透視図を示している。
【図5】図5は、収納ラックを取り扱うためのロボット移送システムの第1透視図を示している。
【図6】図6は、図5の収納ラックを取り扱うためのロボット移送システムの第2透視図を示している。
【図7】図7は、収納ラックと噛み合う図5の収納ラックを取り扱うためのロボット移送システムのフックの拡大詳細を示している。
【図8】図8は、収納ラックの透視図を示している。
【図9】図9は、図8の収納ラックの拡大詳細を示している。
【図10】図10は、本発明の収納棚上の収納ラックの透視図である。
【図11】図11は、2つの棚の間の収納ラックの他の透視図を示している。
【図12】図12は、本発明の廃棄ユニットおよび図5のロボット移送システムの透視平面図を示している。
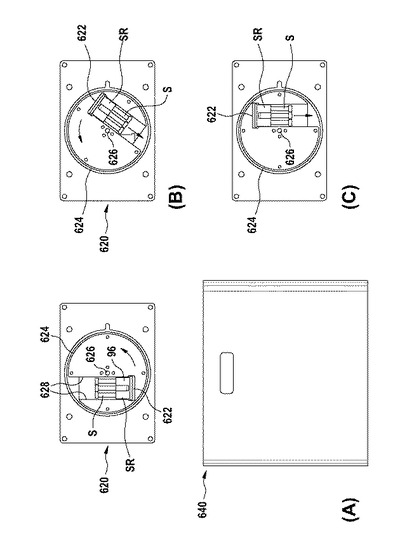
【図13】図13A〜図13Cは、以下の操作工程における図12の廃棄ユニットのドラムの正面図を示している。
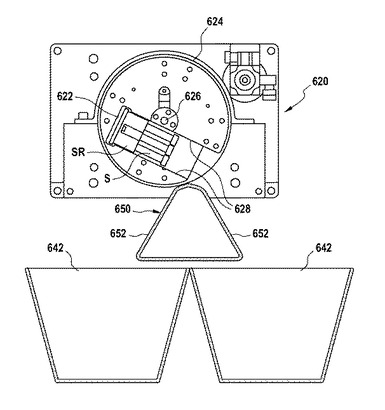
【図14】図14は、本発明の廃棄ユニットの他の実施態様を示している。
【発明を実施するための形態】
【0016】
ここで、いくつかの実施形態を詳細に参照し、その例を添付図面に示す。同じまたは類似の部分を参照するために、全図面にわたり、同じ参照番号を使用する。
【0017】
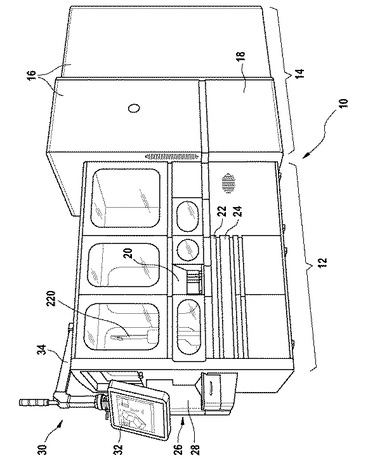
図1は、本発明の実験室システムからなる実験室装置ユニット10の透視図を示している。この実験室装置ユニット10は、実験室分析全システムの部分を形成するいわゆる収納取り出しモジュール(SRM)であってもよい。該収納取り出しモジュールは、ラック搬送部分12(図1の描写の左手側)と、冷蔵保存または収納部分14(図1の描写の右手側)とを含んでいる。この2つの部分12、14の間には、ラックがラック搬送部分12から収納部分14中に移送されまた戻される(回復の場合)搭載/除荷接触面(図示せず)がある。該搭載/除荷接触面は、ゲートなどのように設計してもよい。
【0018】
収納部分14は、冷蔵庫16を含んでいてもよい。本発明の関連における収納部分は、好ましくは、収納ラック中に、複数のサンプル管を収納することができる種々のサイズのキャビネットである。それは、管に対する周囲の温度を、室温以下、出来れば18℃以下また出来れば10℃以下の冷蔵庫内に保持するために、適当な焼き戻しユニットを持っていてもよい。
【0019】
その内部では、収納部分14は、多数のサンプル管ラックを収納するための複数の棚を含んでいる。本発明によると、該収納部分中に搭載されるサンプル管ラックは、いわゆる収納ラックである。このことは、本発明の幾何学的基準を満たす第1ラック(すなわち、種々のタイプの来入ラック)中に含まれるすべての管は、それぞれの第1ラックから取り出され、また収納部分14中に搭載される前に、適当な収納ラック中に手段を求めることを意味している。該収納部分は、1人または2人の人間が、扉(図示せず)を経由して、収納部分14の内部に入ることが可能なだけの充分な大きさであってもよい。この場合、該扉は解放されており、安全スイッチ切り替え回路は、全ての可動システム(ロボットアーム、または他の移送もしくは搬送システム)が、たとえば自然位置またはホーム位置に停止するようになることを保証している。一方第1ラックは、いくらか標準幾何性を持った1列ラックであり、そのために複数の異なった実験室システム中で取り扱われるように設計されているが、第2のラックおよび特に収納ラックは、多数列ラック(たとえば10個の位置より多い、たとえば13〜14位置を持った3列)である。したがって、第2ラックは、特に収納目的に対してより安定でありまた傾斜する可能性が少ない。
【0020】
さらに、収納部分14は、廃棄ユニット18を含む。該廃棄ユニット18は、廃棄ユニット18から収納部分14を分離している壁中で、内部開口部(図示せず)を経由して、該収納部分14に接続されている。この開口部を経由して、有効期限の日(すなわち保管期限)が切れたサンプル管は、廃棄ユニット18を経由して、自動的に廃棄可能である。
【0021】
ラック搬送部分12は、操作する人が、ラック搬送機能を直接目で観察できるように、窓を持ったいくつかの外壁からなるハウジングを持っている。該ラック搬送部分12は、その外壁の1つに開口部20を含み、それを経由して、第1ラックを収納取り出しモジュール10中に挿入できる。該開口部20は、少なくとも1つのロボットアーム220(窓の1つを経由して図1に見られる)を含む第1ラック搬送領域210(図2参照)に通じている。該開口部20は、摺動または後退可能な扉(図示せず)により、閉鎖可能である。
【0022】
さらに、ラック搬送部分12は、引出し22、24を含み、それを経由して、空になった第1ラックおよび/または間違った記号表示を持ったサンプル管を含む第1ラックおよび/または少なくとも1つの引き出されたサンプル管を含むラックを、収納取り出しモジュール10から取り出すことができる。
【0023】
さらに、ラック搬送部分12は、管のキャップ用フィーダータンク28を持ったキャッピング台26を含んでいる。
【0024】
該収納取り出しモジュール10も、関節で繋がったアーム34の先端にタッチスクリーンモニター32の形状を持っているマン・マシン・インタフェース(MMI)30を含んでいる。
【0025】
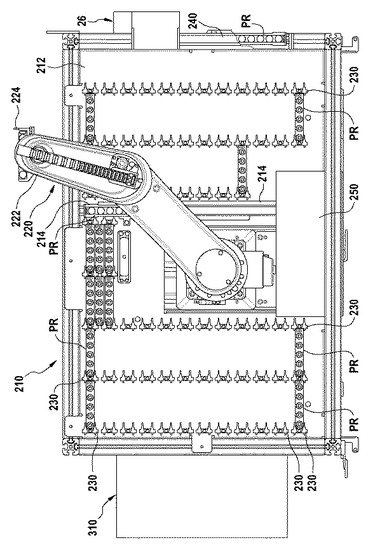
図2は、本発明の実験室システムの第1ラック搬送領域210の平面図を示している。該第1ラック搬送領域210は、図1のラック搬送部分12の内側に、台212を含んでいる。さらに、それは、実質的に台212の中心で、または第1ラック搬送領域210内の少なくとも全ての位置に到達可能な少なくともある位置に搭載してもよい第1ロボットアーム220を含んでいる。たとえば、この目的のために、4軸および4つの自由角度を持ったSCARAロボットなどの公知の適当なロボットを使用できる。その末端には、該ロボットアーム220は、取り扱われるラックをしっかりと握るように設計されたグリッパー222を含んでいる。
【0026】
該台212上では、運搬装置214が、サンプル管(たとえば、5サンプル管)を含む来入第1ラックPRを、台212上に置かれている画像解析ユニット250に向けて運搬するように、設けられている。
【0027】
さらに、複数の配列素子230が、台212上に設けられている。該配列素子230は、ロボットアーム220のグリッパー222の方位に対応する配列または方位で、所定の位置に、第1ラックPRを保持するように設計されている。あらゆる処理の工程において、第1ラックPRの適当な方位を確かなものとするために(サンプル管の位置が、常に明瞭に同定できるように)、第1ラックは、開口部20を経由して運搬装置214上に直接導入されるのではなく、むしろロボットアーム220のグリッパー222によって取り上げられかつ運搬装置214上に置かれる。このためには、来入ラックに対する受取位置(図示していない)が設けられており、そこから、その後ロボットアームは、来入ラックを運搬装置214上に置くために、来入ラックを取り上げる。
【0028】
該運搬装置214は、第1ラックを画像解析ユニット250中に運搬し、そこでは、第1ラック中のサンプル管が、それらの幾何パラメータに関して分析される。各サンプル管の求められた幾何パラメータは、所定の幾何基準と比較され、またサンプル管が、システムに合致しているかどうかを確かめられる。分析される幾何パラメータの1つは、サンプル管上のキャップの存在であり、分析される他のパラメータは、たとえば、管の直径および高さである。
【0029】
サンプル管が、キャップを持っていないことが見出される場合には、さらなる他の処理を行う前に、キャップ付け台26に、全第1ラックを送付する。このためには、第1ロボットアーム220は、キャップを持っていないことを確かめられたサンプル管の再キャップ付けを行うために、サンプル管を持った第1ラックをキャップ付け台26中に運搬する運搬装置240上に、第1ラックを置く。サンプル管の再キャップ付けが、巧く行った後、第1ラックを、以下より詳細に説明されるような通常の処理に戻す。または、場合によっては、ここで、全サンプル管が、キャップを付けまたさらなる処理に適しているように、第1ラックを、画像解析ユニット250中に移送する。
【0030】
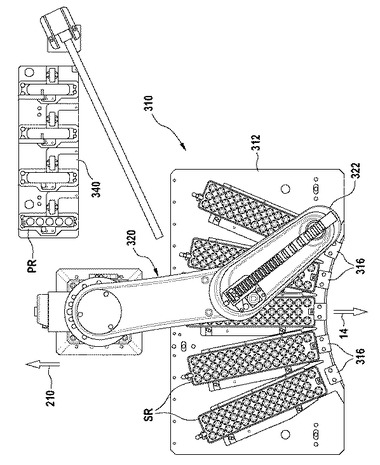
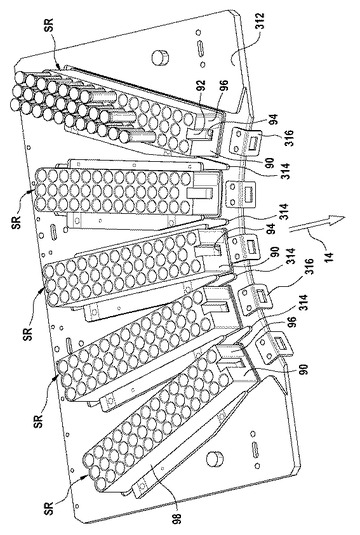
図3は、本発明による手段行使台310の平面図を示している。該手段行使台310も、ラック搬送部分12の1部であり、また図2の第1ラック搬送領域210に隣接して置かれる。たとえば、手段行使台310は、図2中の参照符号310により示されているように、図2の描写中の第1ラック搬送領域210の左手側に置かれる。
【0031】
該手段行使台310は、複数の収納ラックSRを受け取るように設計されている収納ラック結合素子312を含んでいる。該収納ラック結合素子312は、収納ラックSR(図4参照)によりぴったりと受け取るように適合されている多数のリセス314(図面に示された実施形態中では5リセス)を持った実質的に長方形プレートの形状を、基本的には持っている。
【0032】
さらに、該手段行使台310は、第2ロボットアーム320に付着したグリッパー322が手段行使台310内のいずれかの位置に到達できるように収納ラック結合素子312の後ろに置かれた第2ロボットアーム320を含んでいる。上述したように、該第2ロボットアーム320は、第1ラック搬送領域210の第1ロボットアーム220と類似したタイプであるか、同一のタイプであるが、異なったグリッパー322、すなわちサンプル管グリッパーが設けられており、一方、第1ラック搬送領域210の第1ロボットアーム220には、第1ラックグリッパー222が設けられている。
【0033】
さらに、該手段行使台310は、第1ラックを搭載するために、第1ラック搬送領域210の第1ロボットアーム220によって、容易に到達できるように、第1ラック搬送領域210に非常に近い位置に置かれている第1ラック結合素子340を含んでいる。図3の図面において、参照符号14および210を用いた矢印は、それぞれ、手段行使台310の方位を示しており、すなわち第1ラック結合素子340および手段行使台310の第2ロボットアーム320の裏側が、第1ラック搬送領域210に向けて配向され、一方、収納ラック結合素子312および第2ロボットアーム320の前面側は、冷蔵または収納部分14に向けて配向される。
【0034】
操作においては、サンプル管Sを含む第1ラックPRは、運搬装置214によって画像解析ユニット250中に運ばれ、そこでは、サンプル管が、システム適合か、または非システム適合であるかどうかを決めるために、サンプル管Sが、与えられた所定の幾何パラメータに関して分析される。この分析後、第1ラック搬送領域210の第1ロボットアーム220によって、第1ラックPRを、第1ラック結合素子340まで移送する(第1ラック中の全てのサンプル管が、キャップを付けていると仮定して;さもなければ、上述したように、再キャップ取り付け手法をまず行い、続いて、場合により、他の画像解析を行う)。
【0035】
第1ラックを、手段行使台の第1ラック結合素子340中に置いたとき、手段行使台310の第2ロボットアーム320は、管グリッパー322を用いてサンプル管を続いて取り上げることにより、第1ラック中に含まれるサンプル管Sを除荷することを開始する。該管グリッパー322は、単一サンプル管Sを取り上げかつそれを収納ラック結合素子312に向けて移動させる。その途中では、バーコードリーダーの光学通路に沿って収容ラックSRの途中で、第2ロボットアーム320が、サンプル管Sを移動させるように、サンプル管Sは、サンプル管の外面に用いられるバーコードを、バーコードリーダーによって読むことができるように、サンプル管を徐々に回転させると同時に、第2ロボットアーム320の前に置かれるバーコードリーダー(図示せず)を通過する。
【0036】
実験室装置ユニット10の全ての電子素子、すなわちロボットアームおよびその各制御ユニット、画像解析ユニット、バーコードリーダーなどは、データベースを用いて中央CPUに接続されるので、第2ロボットアーム320は、まさに除荷しようとする第1ラック中のどのサンプル管がシステム適合であり、またかくして除荷されることになるかを「知っている」。従って、以前システム適合として分類されたサンプル管のみが、手段行使台310中で除荷され、一方非システム適合として分類されたサンプル管が、第1ラック中に残る。
【0037】
手段行使台310のバーコードリーダーによって、管グリッパー322により保持されているサンプル管が、システム適合であるかどうかを、システムがダブルチェックを行い、また手段行使に必要なデータ、たとえば、サンプル管の直径および/またはサンプル管の保存寿命を取り出す。これらは、手段実行のための2つの主なパラメータであってもよい。従って、複数の収納ラックSRは、第2ロボットアーム320からサンプル管を受け取るために、種々の直径の開口部を持った収納ラック結合素子312上に設けられている。このことは、所定の直径を持った全てのサンプル管は、対応して適当な収納ラック中に置かれることを意味し、また同一の保存寿命を持ったサンプル管のみが、同一収納ラック中に置かれることを意味している。勿論、他の分類基準、たとえば、管高さなども可能である。
【0038】
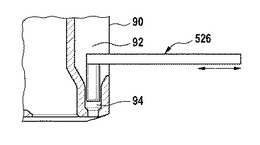
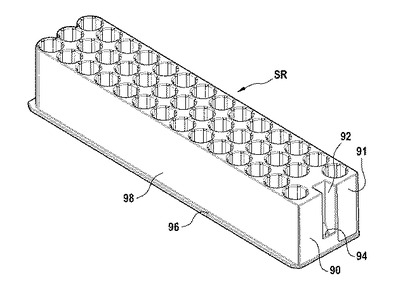
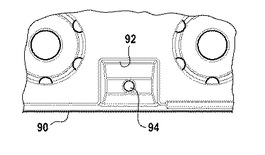
図3および図4の両方から見られるように、収納ラックSRは、互いに平行に置かれるのではなくて、円セグメントに沿って、かつ冷蔵部分または収納部分14(すなわち、2つの部分12、14間の搭載/除荷インターフェース)に通じるゲート(図示せず)に向けて指向する。収納ラックが、収納部分14の冷蔵庫16中に今まさに移送されるときには、該ゲートが開き、冷蔵庫16中に置かれた(第3)ロボット移送システム(図5および図6参照)が、ゲート開口部を経由して伸びまたそれを冷蔵庫中に移送するために、一致した収納ラックをとりあげる。各収納ラックSRの前面90は、垂直スロット92を含み、その下端においては、実質的に水平な円形開口部34が設けられている(図7〜9参照)。第3ロボット移送システムは、適当な補助素子、たとえば、適当な寸法を持ったフック526を用いて、円形開口部94中に噛み合わせることにより、収納ラックと連結してもよく、また第3ロボット移送システムの台上に、収納ラックを引いてもよい。収納ラックSRの前面90上の垂直スロット92の次には、バーコードラベルを受け取る役目の領域91がある。
【0039】
図4から見られるように、収納ラック結合素子312には、収納ラックを受け取るための複数のリセスが設けられており、該リセスは、収納ラックSRが横面98の下端に沿って設けられた対応する伸展部分96と摺動して噛み合うことができるT字型のスロット断面を持っている。さらに、収納ラック結合素子312には、収納ラックの前でロボット移送システムの位置決めをやり易くするために、各リセス314の前に、方位および橋脚歯素子316が設けられている。
【0040】
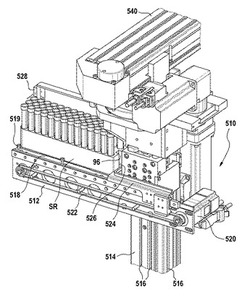
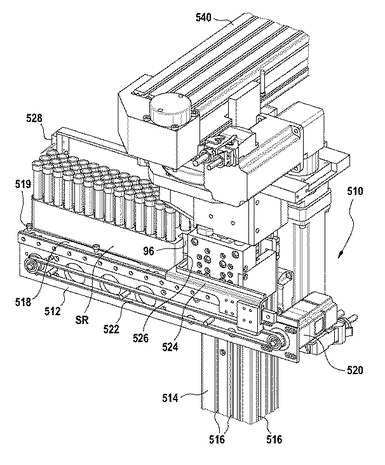
図5および図6を参照して、本発明のロボット移送システム510は、適切な電気モータにより、垂直ガイドスロット516中で垂直ポスト514に沿って移動可能な実質的に垂直伸展を有するキャリヤ素子512を含んでいる。
【0041】
該キャリヤ素子512は、電気モータ520およびベルト駆動522により、キャリヤ素子512から前方に伸びることができる台518を運んでいる。さらに、該キャリヤ素子512は、台518上に摺動可能に置かれまたその前面には、収納ラックSRの対応する水平開口部94と噛み合うためのフック状の素子526が設けられているキット524を含んでいる。
【0042】
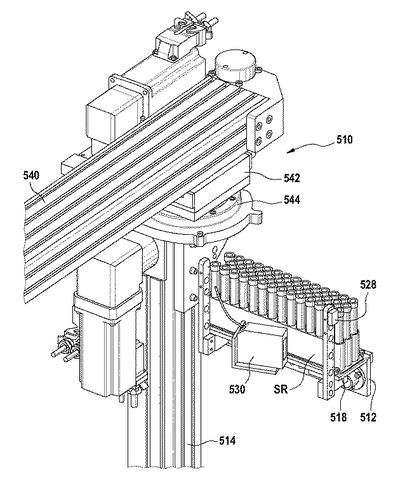
さらに、該ロボット移送システム510は、キャリヤ素子512および台518が収納ラックの前に置かれるときに、収納ラックSRのバーコード表面91に用いられるバーコードラベルを読むことができるように置かれるバーコードリーダー530を含んでいる。この目的のために、バーコードリーダー530は、図6に示すようにわずかな角度を持ってキャリヤ素子に取り付けてもよい。
【0043】
さらに、該ロボット移送システム510は、レール棒540を含み、その下側には、垂直ポスト514がソリ542により摺動して取り付けられ、該ソリ542は、レール棒540のガイドスロットに沿って動くことができる。棚間の細い通路に沿った冷蔵庫の床は、ガイド棒またはガイドレールから自由なままであるという利点があるために、ロボット移送システム510の頭上の移動が可能となるように、レール棒540は、冷蔵庫16の天井に設けてもよい。人が冷蔵庫に入るとき、ロボット移送システムは停止し、または扉から反対の細い通路端などにおいて、最初ニュートラル位置もしくは定位置になり、そこでは、それは停止するように、該冷蔵庫には適当なセンサーが設けられている。該センサーは、扉(安全切り替え回路など)および/または床領域(光バリヤ、他の感光性リレー、床上の重さを感知する工程センサーなど)に接続されていてもよい。
【0044】
ロボット移送システム510の垂直ポスト514は、キャリヤ素子512と共に、垂直ポスト514のフル回転運度を可能にするロータリジョイント544により、ソリ542に取り付けられる。
【0045】
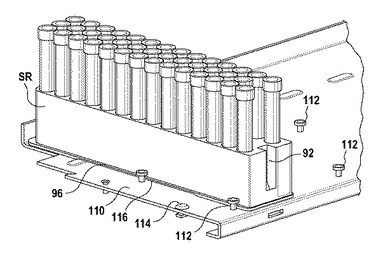
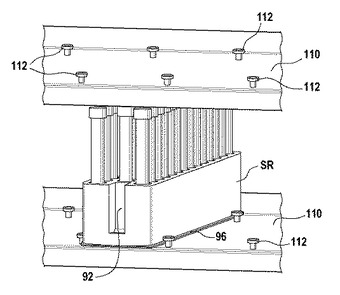
図10および図11は、棚110上の収納位置における収納ラックSRの透視図である。各棚110は、収納ラックSR用の受取区画を形成するように、棚110上に配列された複数のT−ピン112を含む。棚110の垂直方向での2つのピン間の距離は、垂直伸展96を含む底側における収納ラックSRの幅に、ほぼ等しくてもよい。搭載方向においては、棚上に摺動するときに、収納ラックSRの妥当なガイドを提供するために、少なくとも2つのピン112が存在するべきである。1つのピン112を、収納ラックの約半分の長さで設けてもよく、および/または該棚の背面側(図10および図11参照)において設けてもよい。垂直伸展96が、T−形状ピンのヘッドの下に置かれ、いわばT−形状ピンのヘッドの下に取り囲むので、ピン112のT−形状は、棚上の収納ラックSRの適合位置を確保し、またこのようにして、該ラックをただ1つの方向にのみ移動可能である。
【0046】
さらに、棚110は、図10中に示される、高められた保持素子114を含んでいてもよい。該保持素子114は、各棚110の裏領域に置かれるのが好ましくまた収納ラックSRの対応リセス116の下に適合するように設計されている。棚のシート金属の打ち抜きにより、または他の適当な方法で、該高められた保持素子114を形成してもよい。保持素子をそこに固定すること(たとえば、接着、ネジ付け、溶接など)により棚上に保持素子を形成することは可能であるが、ロバスト性の理由から、棚と一体でそれを作ることが有利とするべきである。収納ラックSRの底側におけるリセス116は、該高められた保持素子114との良好な嵌め合いのために、凹部形状を持ってもよい。該保持素子114は、その収納位置でフルに挿入された収納ラックを保持する機能を持っており、そのため、システムの操作の間の振動などにより、収納ラックが、収納位置からゆっくりと外れるかつ落ちることを防ぐ。勿論、そのような高められた保持素子114を、収納ラック結合素子312のリセス314中に設けてもよい。
【0047】
台518は、好ましくはキャリヤ素子512と共に高さ調節装置と接続される。棚から台上に引っ張られるときに、収納ラックが台518の先端で動けなくなることを回避するために、収納ラックを、台上に引くちょうどその前に、収納ラックが引き取られることになる棚のレベルに対して、該高さ調節装置は該台をわずかに低下させる。収納ラックが、台から棚上に押し出されることになる場合には、棚の先端を越えて押し出されるときに、該台が先端で動けなくなることを回避するために、該高さ調節装置は、同じ理由のために、棚のレベルに対してわずかに台を持ち上げる。
【0048】
初期操作段階においては、ロボット移送システム510を制御するCPUのプログラムは、独習ルーチンを行う。該独習ルーチンは、たとえば、各トップ棚収納ラック端位置および底棚収納ラック端位置の各々に適用される棚に沿ったマーキングを読み取るセンサーにより動作し、また棚あたりの収納位置数および棚数(すなわち、棚の列)を、収納部分の1つの棚壁が含むかという情報を用いて動作する。該独習ルーチンにより、ロボット移送システム510が、トップ棚または底棚のいずれかの第1収納ラック端位置にむけて、ロボット移送システム510を移動させ、その後、2つの収納ラック端位置間の距離を全て測定することにより、それが、各対向する収納ラック端位置を同定するまで、棚に沿って水平に移動させることにより、それ自身を計測することができる。その後、2つの収納ラック端位置間の距離を、再び測定することにより、それが、第3収納ラック端位置を同定するまで、ロボット移送システム510が、各対向するトップ棚または底棚に対して垂直に移動する。その後、これら2つの収納ラック端位置間の距離を再び測定することにより、ロボット移送システム510が、棚に沿って、第4収納ラック端位置まで水平に再び移動する。それを完全にするために、場合によっては、ロボット移送システム510は、第4の測定距離を得るために、初期収納ラック端位置に対して垂直に再び移動してもよい。勿論、移動の順序は、縛られたものではなく、ロボット移送システム510も、水平に移動させる前に、第1に垂直に移動してもよい。たとえば4つのマーキング、すなわち収納ラック端位置につき1つのマーキングという基準で、記述された独習ルーチンを行うことができる。
【0049】
水平収納ラック端位置間の距離を、収納ラック位置の数で割ることにより、また垂直収納ラック端位置間の距離を、棚の数により割ることにより、また4つの収納ラック端位置の絶対座標を蓄えることにより、各収納位置間の距離を計算することにより、位置関係が得られる。これらの数字に基づいて、ロボット移送システム510は、その内部座標システムを用いて、全ての棚収納位置を見出してもよい。収納ラックSRが、収納されまたは取り出されなければならないとき、図4に示された収納ラック結合素子312に関しても、類似の独習ルーチンが実行され、そこでは、橋脚歯素子316は、各リセス314の前に置かれたマーキングの機能を持っている。
【0050】
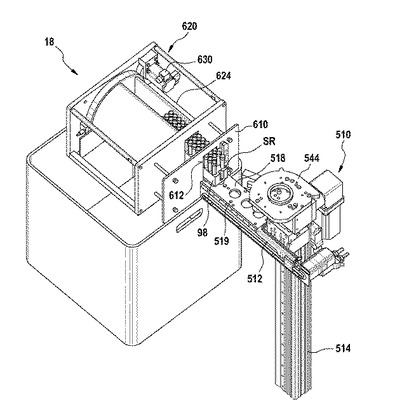
図12は、冷蔵庫16の外側に置かれているが、冷蔵庫16に近接している収納部分14の1部である廃棄ユニット18の概略透視図を示している。冷蔵庫16および廃棄ユニット18は、フルに搭載された収納ラックが通過するに充分な大きさのゲート開口部612が設けられている隔壁610(その一部のみが、図12中に示されている)によって、分離されている。
【0051】
該廃棄ユニット18は、ゲート開口部612と一直線になって隔壁610に固定してとり付けられている傾斜モジュール620を含んでいる。該取り付けは、たとえば、適当な寸法(図12参照)を持ったボルトおよびナットにより行われる。傾斜モジュール620の下には、廃棄容器640が設けられている。該傾斜モジュールは、収納ラック停止位置622を含んでいる。該収納ラック停止位置622は、収納ラックSRが、傾斜モジュール620中で傾斜するときに、収納ラックSRを位置に保持するために、T−形状またはL−形状の断面を持ったガイド素子を備えた台であってもよい。収納ラックの垂直端に沿って設けられた、突出した伸展96が、台622の上げられた端ガイド溝と噛み合うように、停止位置に摺動するときに、収納ラックの下端を取り囲むガイド素子は、上げられた側端により形成されるガイド溝であってもよい。または、ガイド溝の代わりに、ガイド素子として、該台622は、収納部分14の棚110と関連して上記したT−形状のガイドピン112を含んでいてもよい。
【0052】
該収納ラック停止位置622は、中心軸626の周りに回転可能なドラム624内に設けられてもよい。
【0053】
操作においては、冷蔵庫16と廃棄ユニット18との間の隔壁610中で、ゲート開口部612を経由して、冷蔵庫16のロボット移送システム510により、収納ラック停止位置622中のドラム624中に、収納ラックSRを押し込む。一度、収納ラックSRが所定の位置にあり、またゲート開口部612が閉じられると、上述したガイド溝により、収納ラック停止位置622中で所定の位置に保持されている収納ラックモジュールが傾斜し、かつそこに含まれるサンプル管Sが、重力により、傾斜モジュール620の下に設けられた廃棄容器640中に落ち込むように、ドラム624は、たとえば、図13A、図13Bおよび図13Cに示されたように、反時計方向に、回転軸626の周りに回転する。
【0054】
傾斜モジュール620に対する代わりとして、収納ラックモジュールが所定の位置に保持され、かつそこに含まれているサンプル管Sが、重力により、下に設けられた廃棄容器640中に落下するように、冷蔵庫16のロボット移送システム510は、隔壁610中のゲート開口部612を経由して、冷蔵庫16と廃棄ユニット18の間に伸展しかつ回転軸の周りに回転するように、採用されていてもよい(図示せず)。
【0055】
このように、本発明の方法は、ロボット移送システム510により、ゲートを経由して、収納ラックSRを、収納部分14中に搭載する工程と、必要によりまたはある期間、たとえば製品寿命が経過した後に、ゲートを経由して、ロボット移送システム510により、収納ラックSRを収納部分14から取り出す工程と、ある期間が経過した場合に、ロボット移送システム510により、収納ラックSRを廃棄ユニット18中に持ち込む工程と、廃棄ユニット18を経由して、サンプル管を廃棄する工程とから成る。
【0056】
図13A〜Cから見られるように、サンプル管が、収納ラックから落下するよりも収納ラックから摺動するように、収納ラックSRを反転させるプロセスが、なめらかになるように、収納ラックSRそれ自身を回転させるのではなくむしろ傾斜させる回転軸626から、収納ラック停止位置622は、中心を外して置かれる。この効果は、収納ラックSRの側壁98に隣接して管Sの高さを越えて伸びるドラム624内の2つの側壁628の存在により、強化される。効果としては、廃棄容器640からサンプル管を落下させる可能性を排除するかまたは最小限にするような制御された方法で、サンプル管Sは、ドラム624から落下するかまたは滑り出る。
【0057】
図14は、廃棄ユニットの他の実施態様を示している。この実施態様は、2つの小さな廃棄容器642を含んでいる。図13(収納ラック停止位置622のみが、鏡面反転状態で、回転軸626の外側に置かれる)に示された実施態様に比べて、傾斜モジュール620は、変化しないまま残る。
【0058】
ドラム624と2つの廃棄容器642の間の傾斜モジュール620の下には、偏向板650が、設けられている。該偏向板650は、実質的に三角形の形状(2つの下方に傾斜した偏向板652を持ったある種のダブル偏向板にさせる)の断面を持っており、また互いに接触する2つの廃棄容器642の近接端上に、その中央垂直面を用いて、垂直に置かれる。該三角形偏向板650の位置決めは、ドラム624が、どちらかの方向に回転するとき、三角形断面が、廃棄容器の上部の開口部に向けて傾斜しているから、収納ラックSRから落下するまたは滑り出るサンプル管は、側壁628に沿ってまたその後、偏向板650の2つの傾斜面652のいずれかに沿って、最初に、各廃棄容器642中に滑り込む。したがって、ダブル偏向板650は、サンプル管Sが2つの廃棄容器642中に落下することを防止するか、またはそれらを丸くしかつ次に廃棄容器へ落下するドラム624の下に置かれている廃棄容器642の端を殴打することを防止している。
【0059】
さらに、何時廃棄容器が満たされ、かつ変更するべきかを検出するために、センサー(図示せず)を設けてもよい。サンプル管が溢流したり、またサンプルがこぼれるのを避けるために廃棄容器を空にしたり、または交換するまで傾斜モジュールの操作を中断するために、このセンサーを、傾斜モジュールの制御ユニットまたはCPU(図示せず)に接続する。ドラム624の機能、たとえば回転角、受取位置などが正しいことをチェックするために、他のセンサーも、設けてもよい。
【0060】
廃棄に続いて、ロボット移送システム510によって、廃棄ユニット18から、空になった収納ラックを引き出す。引き込みの間、ロボット移送システム510上に置かれたセンサー528は、収納ラックSR中に管が残っているかどうかを検出する。もしこの場合には、非適合状態が検出され、またさらなる処理の前に、高さでよりスペースを割り当てられる収納部分14の上部棚110の1つの上などの停止位置に、収納ラックSRは移送される。同じまたは他のセンサーも、収納ラックを収納する間に、管の高さが、たとえば、冷蔵庫16の2つの棚の間の距離により与えられるある閾値を越えていないことをチェックするなどの高さセンサーの機能を持っている。または、収納ラックを、手段行使台310の収納ラック結合素子312に移送する。ここで、収納ラック中に残っているサンプル管(S)は、異なったラック、たとえば、好ましくは、システムにより取り扱われるいかなる管の直径よりも典型的には大きい、たとえば直径2〜3cmまたはそれ以上のより大きな直径を含む廃棄ラック(WR)を頼りとすることになる。後ほど、廃棄ラック(WR)は、ロボット移送システム510によって、廃棄ユニット18に移送され、また廃棄手法は、反復される。必要により、全てのプロセスを、さらに多くの回数で反復してもよい。通常、廃棄ラック(WR)中での大きな直径の開口部の使用は、このことが起きるリスクを減少させる。
【0061】
このように、本発明の方法は、センサー528により、サンプル管Sが、廃棄後の収納ラックSR中に、残存しているかどうかを感知する工程と、肯定的には、収納ラックSRを停止位置に移送する工程および/または残ったサンプル管Sを廃棄ラックWRに預けて、廃棄手法を反復する工程とを含んでいてもよい。
【符号の説明】
【0062】
14 収納部分
18 廃棄ユニット
94 対応する開口部
110 棚
112 T−ピン
510 ロボット移送システム
518 台
526 連結素子
528 センサー
620 傾斜モジュール
622 ラック停止位置
640、642 廃棄容器
650 傾向板
【技術分野】
【0001】
本発明は、テスト実験室環境におけるサンプル管ラックの取扱に関するものであり、特に貯蔵区画におけるサンプル管を貯蔵との関連で、サンプル管ラックの取扱用の実験室装置に関するものである。さらに詳細には、本発明は、管同定自動化システムに関するものである。
【背景技術】
【0002】
たとえば、患者のサンプルを検査しかつ種々の生体外診断テストを行う臨床実験室などの実験室においては、(血液、尿などの)サンプルを含むテスト管を、多数かつ注意深く効率的に取り扱わねばならない。この数年の間に、対応するシステムおよび装置を備えた自動化手法が、この技術に使用されている。
【0003】
これらのサンプル管の取扱時の1つの態様は、たとえば冷蔵装置でありうる収納用仕切りに置かれる管に関するものである。効率的な取扱目的のためには、これらの管を、個別に取扱うのではなくて、いわゆるラック中に置くことである。通常、管を特定の収納ラック中に置き、この収納ラックを、収納装置中の棚などの収納仕切り中に、所定の時間の間置くことになる。この時間枠の間に、さらなる分析用の要望に応えて、たとえば(そのラック中に含まれている)サンプル管を送るために、ラック取扱装置により、ラックを取り出し、またその後、収納用に元に戻されなければならない。
【0004】
欧州特許第1441026号明細書には、制御された気候条件を持ったキャビネットおよび内部にサンプルを収納するための環状ホルダーを有する収納システムが、開示されている。サンプルホルダー内にサンプルを載せたりまたは降ろしたりする機構を持った自動移送システムが、サンプルを動かす。積載/荷降ろし機構および/またはサンプルホルダーが、中心軸の周りに回転する。垂直リフトカラム、および上部の覆いにあるロックを経由してリフト台車において相対的に垂直移動する移送ガイドを持った伸縮自由なメカニズムにより、サンプルが、組立部の上部で挿入されかつ取り除かれる。
【0005】
米国特許第6129428号明細書には、回転ラックでありまた目的物運搬器中の目的物を保持する目的物収納装置が開示されている。目的物は、目的物収納装置の構造上にのみ存在し、かつ持ち上げが可能である。該収納台は、回転ラック状目的物収納装置と、回転ラック状目的物収納装置の軸に対して平行にまた垂直に、目的物運搬器を移動させる目的物運搬器保持するための素子を持った移送装置とを持っている。気候テストキャビネットは、窓と、その内側に目的物収納装置と移送装置からなる収納台とを持っており、それは、目的物収納装置と窓の近辺の間に、目的物キャリヤの1つを、同時に前後に移送させる。
【0006】
米国特許第6478524号明細書には、収納配置が、互いのトップに配置された、いくつかの収納スペースを含む少なくとも1つの収納軸を持った収納装置と、目的物の短期での受け取り用の配送装置とを持っていることを特徴とする収納配置と目的物用収納容器とが、開示されている。さらに、該収納配置は、目的物キャリヤを持った移送装置を持っており、また垂直置換装置と、水平回転装置と、目的物キャリヤを、配送装置と収納スペースの間に置き換えるための水平置換装置とを持っている。該目的物は、垂直線に対して常に同一角をとり、そこでは、目的物の基準表面が、水平に配向されていることが好ましい。該収納容器は、収納キャビネットと、統合された収納配置から成っている。該収納キャビネットは、ロック窓開口部を持っており、その寸法は、目的物の寸法に対応している。該配送装置は、収納キャビネットの外側に置かれている。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、請求項11および請求項12それぞれに記載の特徴を持った方法のみならず、請求項1記載の特徴を持ったサンプル管ラックを取扱うための実験室システムを提供する。
【課題を解決するための手段】
【0008】
本発明によると、実験室サンプル管ラックの取扱用実験室システムは、複数の収納ラックを収納するための複数の棚を持った収納部分と、該収納ラックからサンプル管を処分するための廃棄ユニットと、該収納部分中に、収納ラックを搭載するための、該収納部分から収納ラックを取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニットに持ってくるためのロボット移送システムから成っている。好ましい実施形態によると、該搬送システムは、搬送される収納ラックと連結するための連結素子を含み、該連結素子は、そこに連結されるときに、収納ラック上に、押し/引き力を移す。さらに、該移送システムは、移送される収納ラックを運ぶための台を含み、該台は、高さ調整装置に、操作可能に接続されている。収納ラックが、収納位置から該台上に、たとえば、収納装置中の棚上に引かれる場合には、該高さ調整装置が、ラックが引かれる収納位置の水準よりわずかに下に、該台を引き下げる。収納ラックが、収納位置にある台から、たとえば、収納装置中の棚上に引かれる場合には、該高さ調整装置が、収納ラックが押し込まれる収納位置の水準よりわずかに上に、該台を引き上げる。
【0009】
本発明によれば、収納搬送台のレベルは、収納ラックを取り扱う方向により調整され、該収納ラックの適当な挿入および引き戻し/回復が、可能になる。
【0010】
さらに、本発明は、収納の所定制限時間の終了後に実験室サンプル管を取り扱うための実験室システムを提供する。好ましい実施態様によると、該廃棄ユニットは、廃棄容器上に置かれたラック停止位置を持った傾斜モジュールを含んでいる。傾斜モジュールは、該ラック中に含まれるサンプル管が廃棄容器中に下へ落ちるように、移送システムによってラックと共に搭載されるときに、該ラック停止位置を越えて傾くように設計されている。
【0011】
本発明によると、廃棄されるラック含有サンプル管は、該傾斜モジュール中に置かれる。該ラック停止位置の傾斜に続いて、該サンプル管は、重力により該ラックから下の廃棄容器中へ落ち込む。このことにより、管の自動廃棄が可能になり、該廃棄容器へ管が次に落ち込まないことが確かなものとなる。落下サンプルを、廃棄容器中に導くために、該傾斜モジュールと該廃棄容器の間に、偏向板または邪魔板を置いてもよい。該ラックが空になった後、それは、通常の(非傾斜)位置中に戻され、該移送システムによって取り出される。引っ込める間に、ラック中に管が残留しているかどうかを、センサーが検出する。該傾斜モジュールに対して該移送システムにより行われる該配送/取り出し機構は、収納位置に対して行われる機構と同一または類似している。
【0012】
さらなる特徴および実施形態は、以下の説明および添付の図面から明確になる。
【0013】
本開示の範囲から逸脱しないで、上述した特徴および以後記述するものは、特定の組み合わせで使用できるだけでなく、他の組み合わせまたはそれら自体に基づいて使用できることは、理解される。本発明の開示は、開示された装置およびシステムの操作の対応する方法をもカバーし、かつ本説明は、コンピュータプログラムが、コンピュータまたは制御ユニット上で動く時、本発明の方法を行うために適したプログラムコード化手段を持ったコンピュータプログラムをもカバーしている。コンピュータ可読の媒体上に収納されるのみならず、コンピュータプログラムそれ自体が主張される。
【0014】
種々の実装の一例を、実施形態による図面中で、概略的に説明し、また以後、図面を参照して詳細に説明する。説明は、決して本開示の範囲に限定するものではなく、また好ましい実施形態の説明である。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明の実験室システムからなる実験室装置ユニットの透視図を示している。
【図2】図2は、来入第1ラックが取り扱われる本発明の実験室システムの第1ラック搬送領域上への平面図を示している。
【図3】図3は、本発明による手段行使台の平面図を示している。
【図4】図4は、図3の手段行使台の収納ラック結合素子の平面透視図を示している。
【図5】図5は、収納ラックを取り扱うためのロボット移送システムの第1透視図を示している。
【図6】図6は、図5の収納ラックを取り扱うためのロボット移送システムの第2透視図を示している。
【図7】図7は、収納ラックと噛み合う図5の収納ラックを取り扱うためのロボット移送システムのフックの拡大詳細を示している。
【図8】図8は、収納ラックの透視図を示している。
【図9】図9は、図8の収納ラックの拡大詳細を示している。
【図10】図10は、本発明の収納棚上の収納ラックの透視図である。
【図11】図11は、2つの棚の間の収納ラックの他の透視図を示している。
【図12】図12は、本発明の廃棄ユニットおよび図5のロボット移送システムの透視平面図を示している。
【図13】図13A〜図13Cは、以下の操作工程における図12の廃棄ユニットのドラムの正面図を示している。
【図14】図14は、本発明の廃棄ユニットの他の実施態様を示している。
【発明を実施するための形態】
【0016】
ここで、いくつかの実施形態を詳細に参照し、その例を添付図面に示す。同じまたは類似の部分を参照するために、全図面にわたり、同じ参照番号を使用する。
【0017】
図1は、本発明の実験室システムからなる実験室装置ユニット10の透視図を示している。この実験室装置ユニット10は、実験室分析全システムの部分を形成するいわゆる収納取り出しモジュール(SRM)であってもよい。該収納取り出しモジュールは、ラック搬送部分12(図1の描写の左手側)と、冷蔵保存または収納部分14(図1の描写の右手側)とを含んでいる。この2つの部分12、14の間には、ラックがラック搬送部分12から収納部分14中に移送されまた戻される(回復の場合)搭載/除荷接触面(図示せず)がある。該搭載/除荷接触面は、ゲートなどのように設計してもよい。
【0018】
収納部分14は、冷蔵庫16を含んでいてもよい。本発明の関連における収納部分は、好ましくは、収納ラック中に、複数のサンプル管を収納することができる種々のサイズのキャビネットである。それは、管に対する周囲の温度を、室温以下、出来れば18℃以下また出来れば10℃以下の冷蔵庫内に保持するために、適当な焼き戻しユニットを持っていてもよい。
【0019】
その内部では、収納部分14は、多数のサンプル管ラックを収納するための複数の棚を含んでいる。本発明によると、該収納部分中に搭載されるサンプル管ラックは、いわゆる収納ラックである。このことは、本発明の幾何学的基準を満たす第1ラック(すなわち、種々のタイプの来入ラック)中に含まれるすべての管は、それぞれの第1ラックから取り出され、また収納部分14中に搭載される前に、適当な収納ラック中に手段を求めることを意味している。該収納部分は、1人または2人の人間が、扉(図示せず)を経由して、収納部分14の内部に入ることが可能なだけの充分な大きさであってもよい。この場合、該扉は解放されており、安全スイッチ切り替え回路は、全ての可動システム(ロボットアーム、または他の移送もしくは搬送システム)が、たとえば自然位置またはホーム位置に停止するようになることを保証している。一方第1ラックは、いくらか標準幾何性を持った1列ラックであり、そのために複数の異なった実験室システム中で取り扱われるように設計されているが、第2のラックおよび特に収納ラックは、多数列ラック(たとえば10個の位置より多い、たとえば13〜14位置を持った3列)である。したがって、第2ラックは、特に収納目的に対してより安定でありまた傾斜する可能性が少ない。
【0020】
さらに、収納部分14は、廃棄ユニット18を含む。該廃棄ユニット18は、廃棄ユニット18から収納部分14を分離している壁中で、内部開口部(図示せず)を経由して、該収納部分14に接続されている。この開口部を経由して、有効期限の日(すなわち保管期限)が切れたサンプル管は、廃棄ユニット18を経由して、自動的に廃棄可能である。
【0021】
ラック搬送部分12は、操作する人が、ラック搬送機能を直接目で観察できるように、窓を持ったいくつかの外壁からなるハウジングを持っている。該ラック搬送部分12は、その外壁の1つに開口部20を含み、それを経由して、第1ラックを収納取り出しモジュール10中に挿入できる。該開口部20は、少なくとも1つのロボットアーム220(窓の1つを経由して図1に見られる)を含む第1ラック搬送領域210(図2参照)に通じている。該開口部20は、摺動または後退可能な扉(図示せず)により、閉鎖可能である。
【0022】
さらに、ラック搬送部分12は、引出し22、24を含み、それを経由して、空になった第1ラックおよび/または間違った記号表示を持ったサンプル管を含む第1ラックおよび/または少なくとも1つの引き出されたサンプル管を含むラックを、収納取り出しモジュール10から取り出すことができる。
【0023】
さらに、ラック搬送部分12は、管のキャップ用フィーダータンク28を持ったキャッピング台26を含んでいる。
【0024】
該収納取り出しモジュール10も、関節で繋がったアーム34の先端にタッチスクリーンモニター32の形状を持っているマン・マシン・インタフェース(MMI)30を含んでいる。
【0025】
図2は、本発明の実験室システムの第1ラック搬送領域210の平面図を示している。該第1ラック搬送領域210は、図1のラック搬送部分12の内側に、台212を含んでいる。さらに、それは、実質的に台212の中心で、または第1ラック搬送領域210内の少なくとも全ての位置に到達可能な少なくともある位置に搭載してもよい第1ロボットアーム220を含んでいる。たとえば、この目的のために、4軸および4つの自由角度を持ったSCARAロボットなどの公知の適当なロボットを使用できる。その末端には、該ロボットアーム220は、取り扱われるラックをしっかりと握るように設計されたグリッパー222を含んでいる。
【0026】
該台212上では、運搬装置214が、サンプル管(たとえば、5サンプル管)を含む来入第1ラックPRを、台212上に置かれている画像解析ユニット250に向けて運搬するように、設けられている。
【0027】
さらに、複数の配列素子230が、台212上に設けられている。該配列素子230は、ロボットアーム220のグリッパー222の方位に対応する配列または方位で、所定の位置に、第1ラックPRを保持するように設計されている。あらゆる処理の工程において、第1ラックPRの適当な方位を確かなものとするために(サンプル管の位置が、常に明瞭に同定できるように)、第1ラックは、開口部20を経由して運搬装置214上に直接導入されるのではなく、むしろロボットアーム220のグリッパー222によって取り上げられかつ運搬装置214上に置かれる。このためには、来入ラックに対する受取位置(図示していない)が設けられており、そこから、その後ロボットアームは、来入ラックを運搬装置214上に置くために、来入ラックを取り上げる。
【0028】
該運搬装置214は、第1ラックを画像解析ユニット250中に運搬し、そこでは、第1ラック中のサンプル管が、それらの幾何パラメータに関して分析される。各サンプル管の求められた幾何パラメータは、所定の幾何基準と比較され、またサンプル管が、システムに合致しているかどうかを確かめられる。分析される幾何パラメータの1つは、サンプル管上のキャップの存在であり、分析される他のパラメータは、たとえば、管の直径および高さである。
【0029】
サンプル管が、キャップを持っていないことが見出される場合には、さらなる他の処理を行う前に、キャップ付け台26に、全第1ラックを送付する。このためには、第1ロボットアーム220は、キャップを持っていないことを確かめられたサンプル管の再キャップ付けを行うために、サンプル管を持った第1ラックをキャップ付け台26中に運搬する運搬装置240上に、第1ラックを置く。サンプル管の再キャップ付けが、巧く行った後、第1ラックを、以下より詳細に説明されるような通常の処理に戻す。または、場合によっては、ここで、全サンプル管が、キャップを付けまたさらなる処理に適しているように、第1ラックを、画像解析ユニット250中に移送する。
【0030】
図3は、本発明による手段行使台310の平面図を示している。該手段行使台310も、ラック搬送部分12の1部であり、また図2の第1ラック搬送領域210に隣接して置かれる。たとえば、手段行使台310は、図2中の参照符号310により示されているように、図2の描写中の第1ラック搬送領域210の左手側に置かれる。
【0031】
該手段行使台310は、複数の収納ラックSRを受け取るように設計されている収納ラック結合素子312を含んでいる。該収納ラック結合素子312は、収納ラックSR(図4参照)によりぴったりと受け取るように適合されている多数のリセス314(図面に示された実施形態中では5リセス)を持った実質的に長方形プレートの形状を、基本的には持っている。
【0032】
さらに、該手段行使台310は、第2ロボットアーム320に付着したグリッパー322が手段行使台310内のいずれかの位置に到達できるように収納ラック結合素子312の後ろに置かれた第2ロボットアーム320を含んでいる。上述したように、該第2ロボットアーム320は、第1ラック搬送領域210の第1ロボットアーム220と類似したタイプであるか、同一のタイプであるが、異なったグリッパー322、すなわちサンプル管グリッパーが設けられており、一方、第1ラック搬送領域210の第1ロボットアーム220には、第1ラックグリッパー222が設けられている。
【0033】
さらに、該手段行使台310は、第1ラックを搭載するために、第1ラック搬送領域210の第1ロボットアーム220によって、容易に到達できるように、第1ラック搬送領域210に非常に近い位置に置かれている第1ラック結合素子340を含んでいる。図3の図面において、参照符号14および210を用いた矢印は、それぞれ、手段行使台310の方位を示しており、すなわち第1ラック結合素子340および手段行使台310の第2ロボットアーム320の裏側が、第1ラック搬送領域210に向けて配向され、一方、収納ラック結合素子312および第2ロボットアーム320の前面側は、冷蔵または収納部分14に向けて配向される。
【0034】
操作においては、サンプル管Sを含む第1ラックPRは、運搬装置214によって画像解析ユニット250中に運ばれ、そこでは、サンプル管が、システム適合か、または非システム適合であるかどうかを決めるために、サンプル管Sが、与えられた所定の幾何パラメータに関して分析される。この分析後、第1ラック搬送領域210の第1ロボットアーム220によって、第1ラックPRを、第1ラック結合素子340まで移送する(第1ラック中の全てのサンプル管が、キャップを付けていると仮定して;さもなければ、上述したように、再キャップ取り付け手法をまず行い、続いて、場合により、他の画像解析を行う)。
【0035】
第1ラックを、手段行使台の第1ラック結合素子340中に置いたとき、手段行使台310の第2ロボットアーム320は、管グリッパー322を用いてサンプル管を続いて取り上げることにより、第1ラック中に含まれるサンプル管Sを除荷することを開始する。該管グリッパー322は、単一サンプル管Sを取り上げかつそれを収納ラック結合素子312に向けて移動させる。その途中では、バーコードリーダーの光学通路に沿って収容ラックSRの途中で、第2ロボットアーム320が、サンプル管Sを移動させるように、サンプル管Sは、サンプル管の外面に用いられるバーコードを、バーコードリーダーによって読むことができるように、サンプル管を徐々に回転させると同時に、第2ロボットアーム320の前に置かれるバーコードリーダー(図示せず)を通過する。
【0036】
実験室装置ユニット10の全ての電子素子、すなわちロボットアームおよびその各制御ユニット、画像解析ユニット、バーコードリーダーなどは、データベースを用いて中央CPUに接続されるので、第2ロボットアーム320は、まさに除荷しようとする第1ラック中のどのサンプル管がシステム適合であり、またかくして除荷されることになるかを「知っている」。従って、以前システム適合として分類されたサンプル管のみが、手段行使台310中で除荷され、一方非システム適合として分類されたサンプル管が、第1ラック中に残る。
【0037】
手段行使台310のバーコードリーダーによって、管グリッパー322により保持されているサンプル管が、システム適合であるかどうかを、システムがダブルチェックを行い、また手段行使に必要なデータ、たとえば、サンプル管の直径および/またはサンプル管の保存寿命を取り出す。これらは、手段実行のための2つの主なパラメータであってもよい。従って、複数の収納ラックSRは、第2ロボットアーム320からサンプル管を受け取るために、種々の直径の開口部を持った収納ラック結合素子312上に設けられている。このことは、所定の直径を持った全てのサンプル管は、対応して適当な収納ラック中に置かれることを意味し、また同一の保存寿命を持ったサンプル管のみが、同一収納ラック中に置かれることを意味している。勿論、他の分類基準、たとえば、管高さなども可能である。
【0038】
図3および図4の両方から見られるように、収納ラックSRは、互いに平行に置かれるのではなくて、円セグメントに沿って、かつ冷蔵部分または収納部分14(すなわち、2つの部分12、14間の搭載/除荷インターフェース)に通じるゲート(図示せず)に向けて指向する。収納ラックが、収納部分14の冷蔵庫16中に今まさに移送されるときには、該ゲートが開き、冷蔵庫16中に置かれた(第3)ロボット移送システム(図5および図6参照)が、ゲート開口部を経由して伸びまたそれを冷蔵庫中に移送するために、一致した収納ラックをとりあげる。各収納ラックSRの前面90は、垂直スロット92を含み、その下端においては、実質的に水平な円形開口部34が設けられている(図7〜9参照)。第3ロボット移送システムは、適当な補助素子、たとえば、適当な寸法を持ったフック526を用いて、円形開口部94中に噛み合わせることにより、収納ラックと連結してもよく、また第3ロボット移送システムの台上に、収納ラックを引いてもよい。収納ラックSRの前面90上の垂直スロット92の次には、バーコードラベルを受け取る役目の領域91がある。
【0039】
図4から見られるように、収納ラック結合素子312には、収納ラックを受け取るための複数のリセスが設けられており、該リセスは、収納ラックSRが横面98の下端に沿って設けられた対応する伸展部分96と摺動して噛み合うことができるT字型のスロット断面を持っている。さらに、収納ラック結合素子312には、収納ラックの前でロボット移送システムの位置決めをやり易くするために、各リセス314の前に、方位および橋脚歯素子316が設けられている。
【0040】
図5および図6を参照して、本発明のロボット移送システム510は、適切な電気モータにより、垂直ガイドスロット516中で垂直ポスト514に沿って移動可能な実質的に垂直伸展を有するキャリヤ素子512を含んでいる。
【0041】
該キャリヤ素子512は、電気モータ520およびベルト駆動522により、キャリヤ素子512から前方に伸びることができる台518を運んでいる。さらに、該キャリヤ素子512は、台518上に摺動可能に置かれまたその前面には、収納ラックSRの対応する水平開口部94と噛み合うためのフック状の素子526が設けられているキット524を含んでいる。
【0042】
さらに、該ロボット移送システム510は、キャリヤ素子512および台518が収納ラックの前に置かれるときに、収納ラックSRのバーコード表面91に用いられるバーコードラベルを読むことができるように置かれるバーコードリーダー530を含んでいる。この目的のために、バーコードリーダー530は、図6に示すようにわずかな角度を持ってキャリヤ素子に取り付けてもよい。
【0043】
さらに、該ロボット移送システム510は、レール棒540を含み、その下側には、垂直ポスト514がソリ542により摺動して取り付けられ、該ソリ542は、レール棒540のガイドスロットに沿って動くことができる。棚間の細い通路に沿った冷蔵庫の床は、ガイド棒またはガイドレールから自由なままであるという利点があるために、ロボット移送システム510の頭上の移動が可能となるように、レール棒540は、冷蔵庫16の天井に設けてもよい。人が冷蔵庫に入るとき、ロボット移送システムは停止し、または扉から反対の細い通路端などにおいて、最初ニュートラル位置もしくは定位置になり、そこでは、それは停止するように、該冷蔵庫には適当なセンサーが設けられている。該センサーは、扉(安全切り替え回路など)および/または床領域(光バリヤ、他の感光性リレー、床上の重さを感知する工程センサーなど)に接続されていてもよい。
【0044】
ロボット移送システム510の垂直ポスト514は、キャリヤ素子512と共に、垂直ポスト514のフル回転運度を可能にするロータリジョイント544により、ソリ542に取り付けられる。
【0045】
図10および図11は、棚110上の収納位置における収納ラックSRの透視図である。各棚110は、収納ラックSR用の受取区画を形成するように、棚110上に配列された複数のT−ピン112を含む。棚110の垂直方向での2つのピン間の距離は、垂直伸展96を含む底側における収納ラックSRの幅に、ほぼ等しくてもよい。搭載方向においては、棚上に摺動するときに、収納ラックSRの妥当なガイドを提供するために、少なくとも2つのピン112が存在するべきである。1つのピン112を、収納ラックの約半分の長さで設けてもよく、および/または該棚の背面側(図10および図11参照)において設けてもよい。垂直伸展96が、T−形状ピンのヘッドの下に置かれ、いわばT−形状ピンのヘッドの下に取り囲むので、ピン112のT−形状は、棚上の収納ラックSRの適合位置を確保し、またこのようにして、該ラックをただ1つの方向にのみ移動可能である。
【0046】
さらに、棚110は、図10中に示される、高められた保持素子114を含んでいてもよい。該保持素子114は、各棚110の裏領域に置かれるのが好ましくまた収納ラックSRの対応リセス116の下に適合するように設計されている。棚のシート金属の打ち抜きにより、または他の適当な方法で、該高められた保持素子114を形成してもよい。保持素子をそこに固定すること(たとえば、接着、ネジ付け、溶接など)により棚上に保持素子を形成することは可能であるが、ロバスト性の理由から、棚と一体でそれを作ることが有利とするべきである。収納ラックSRの底側におけるリセス116は、該高められた保持素子114との良好な嵌め合いのために、凹部形状を持ってもよい。該保持素子114は、その収納位置でフルに挿入された収納ラックを保持する機能を持っており、そのため、システムの操作の間の振動などにより、収納ラックが、収納位置からゆっくりと外れるかつ落ちることを防ぐ。勿論、そのような高められた保持素子114を、収納ラック結合素子312のリセス314中に設けてもよい。
【0047】
台518は、好ましくはキャリヤ素子512と共に高さ調節装置と接続される。棚から台上に引っ張られるときに、収納ラックが台518の先端で動けなくなることを回避するために、収納ラックを、台上に引くちょうどその前に、収納ラックが引き取られることになる棚のレベルに対して、該高さ調節装置は該台をわずかに低下させる。収納ラックが、台から棚上に押し出されることになる場合には、棚の先端を越えて押し出されるときに、該台が先端で動けなくなることを回避するために、該高さ調節装置は、同じ理由のために、棚のレベルに対してわずかに台を持ち上げる。
【0048】
初期操作段階においては、ロボット移送システム510を制御するCPUのプログラムは、独習ルーチンを行う。該独習ルーチンは、たとえば、各トップ棚収納ラック端位置および底棚収納ラック端位置の各々に適用される棚に沿ったマーキングを読み取るセンサーにより動作し、また棚あたりの収納位置数および棚数(すなわち、棚の列)を、収納部分の1つの棚壁が含むかという情報を用いて動作する。該独習ルーチンにより、ロボット移送システム510が、トップ棚または底棚のいずれかの第1収納ラック端位置にむけて、ロボット移送システム510を移動させ、その後、2つの収納ラック端位置間の距離を全て測定することにより、それが、各対向する収納ラック端位置を同定するまで、棚に沿って水平に移動させることにより、それ自身を計測することができる。その後、2つの収納ラック端位置間の距離を、再び測定することにより、それが、第3収納ラック端位置を同定するまで、ロボット移送システム510が、各対向するトップ棚または底棚に対して垂直に移動する。その後、これら2つの収納ラック端位置間の距離を再び測定することにより、ロボット移送システム510が、棚に沿って、第4収納ラック端位置まで水平に再び移動する。それを完全にするために、場合によっては、ロボット移送システム510は、第4の測定距離を得るために、初期収納ラック端位置に対して垂直に再び移動してもよい。勿論、移動の順序は、縛られたものではなく、ロボット移送システム510も、水平に移動させる前に、第1に垂直に移動してもよい。たとえば4つのマーキング、すなわち収納ラック端位置につき1つのマーキングという基準で、記述された独習ルーチンを行うことができる。
【0049】
水平収納ラック端位置間の距離を、収納ラック位置の数で割ることにより、また垂直収納ラック端位置間の距離を、棚の数により割ることにより、また4つの収納ラック端位置の絶対座標を蓄えることにより、各収納位置間の距離を計算することにより、位置関係が得られる。これらの数字に基づいて、ロボット移送システム510は、その内部座標システムを用いて、全ての棚収納位置を見出してもよい。収納ラックSRが、収納されまたは取り出されなければならないとき、図4に示された収納ラック結合素子312に関しても、類似の独習ルーチンが実行され、そこでは、橋脚歯素子316は、各リセス314の前に置かれたマーキングの機能を持っている。
【0050】
図12は、冷蔵庫16の外側に置かれているが、冷蔵庫16に近接している収納部分14の1部である廃棄ユニット18の概略透視図を示している。冷蔵庫16および廃棄ユニット18は、フルに搭載された収納ラックが通過するに充分な大きさのゲート開口部612が設けられている隔壁610(その一部のみが、図12中に示されている)によって、分離されている。
【0051】
該廃棄ユニット18は、ゲート開口部612と一直線になって隔壁610に固定してとり付けられている傾斜モジュール620を含んでいる。該取り付けは、たとえば、適当な寸法(図12参照)を持ったボルトおよびナットにより行われる。傾斜モジュール620の下には、廃棄容器640が設けられている。該傾斜モジュールは、収納ラック停止位置622を含んでいる。該収納ラック停止位置622は、収納ラックSRが、傾斜モジュール620中で傾斜するときに、収納ラックSRを位置に保持するために、T−形状またはL−形状の断面を持ったガイド素子を備えた台であってもよい。収納ラックの垂直端に沿って設けられた、突出した伸展96が、台622の上げられた端ガイド溝と噛み合うように、停止位置に摺動するときに、収納ラックの下端を取り囲むガイド素子は、上げられた側端により形成されるガイド溝であってもよい。または、ガイド溝の代わりに、ガイド素子として、該台622は、収納部分14の棚110と関連して上記したT−形状のガイドピン112を含んでいてもよい。
【0052】
該収納ラック停止位置622は、中心軸626の周りに回転可能なドラム624内に設けられてもよい。
【0053】
操作においては、冷蔵庫16と廃棄ユニット18との間の隔壁610中で、ゲート開口部612を経由して、冷蔵庫16のロボット移送システム510により、収納ラック停止位置622中のドラム624中に、収納ラックSRを押し込む。一度、収納ラックSRが所定の位置にあり、またゲート開口部612が閉じられると、上述したガイド溝により、収納ラック停止位置622中で所定の位置に保持されている収納ラックモジュールが傾斜し、かつそこに含まれるサンプル管Sが、重力により、傾斜モジュール620の下に設けられた廃棄容器640中に落ち込むように、ドラム624は、たとえば、図13A、図13Bおよび図13Cに示されたように、反時計方向に、回転軸626の周りに回転する。
【0054】
傾斜モジュール620に対する代わりとして、収納ラックモジュールが所定の位置に保持され、かつそこに含まれているサンプル管Sが、重力により、下に設けられた廃棄容器640中に落下するように、冷蔵庫16のロボット移送システム510は、隔壁610中のゲート開口部612を経由して、冷蔵庫16と廃棄ユニット18の間に伸展しかつ回転軸の周りに回転するように、採用されていてもよい(図示せず)。
【0055】
このように、本発明の方法は、ロボット移送システム510により、ゲートを経由して、収納ラックSRを、収納部分14中に搭載する工程と、必要によりまたはある期間、たとえば製品寿命が経過した後に、ゲートを経由して、ロボット移送システム510により、収納ラックSRを収納部分14から取り出す工程と、ある期間が経過した場合に、ロボット移送システム510により、収納ラックSRを廃棄ユニット18中に持ち込む工程と、廃棄ユニット18を経由して、サンプル管を廃棄する工程とから成る。
【0056】
図13A〜Cから見られるように、サンプル管が、収納ラックから落下するよりも収納ラックから摺動するように、収納ラックSRを反転させるプロセスが、なめらかになるように、収納ラックSRそれ自身を回転させるのではなくむしろ傾斜させる回転軸626から、収納ラック停止位置622は、中心を外して置かれる。この効果は、収納ラックSRの側壁98に隣接して管Sの高さを越えて伸びるドラム624内の2つの側壁628の存在により、強化される。効果としては、廃棄容器640からサンプル管を落下させる可能性を排除するかまたは最小限にするような制御された方法で、サンプル管Sは、ドラム624から落下するかまたは滑り出る。
【0057】
図14は、廃棄ユニットの他の実施態様を示している。この実施態様は、2つの小さな廃棄容器642を含んでいる。図13(収納ラック停止位置622のみが、鏡面反転状態で、回転軸626の外側に置かれる)に示された実施態様に比べて、傾斜モジュール620は、変化しないまま残る。
【0058】
ドラム624と2つの廃棄容器642の間の傾斜モジュール620の下には、偏向板650が、設けられている。該偏向板650は、実質的に三角形の形状(2つの下方に傾斜した偏向板652を持ったある種のダブル偏向板にさせる)の断面を持っており、また互いに接触する2つの廃棄容器642の近接端上に、その中央垂直面を用いて、垂直に置かれる。該三角形偏向板650の位置決めは、ドラム624が、どちらかの方向に回転するとき、三角形断面が、廃棄容器の上部の開口部に向けて傾斜しているから、収納ラックSRから落下するまたは滑り出るサンプル管は、側壁628に沿ってまたその後、偏向板650の2つの傾斜面652のいずれかに沿って、最初に、各廃棄容器642中に滑り込む。したがって、ダブル偏向板650は、サンプル管Sが2つの廃棄容器642中に落下することを防止するか、またはそれらを丸くしかつ次に廃棄容器へ落下するドラム624の下に置かれている廃棄容器642の端を殴打することを防止している。
【0059】
さらに、何時廃棄容器が満たされ、かつ変更するべきかを検出するために、センサー(図示せず)を設けてもよい。サンプル管が溢流したり、またサンプルがこぼれるのを避けるために廃棄容器を空にしたり、または交換するまで傾斜モジュールの操作を中断するために、このセンサーを、傾斜モジュールの制御ユニットまたはCPU(図示せず)に接続する。ドラム624の機能、たとえば回転角、受取位置などが正しいことをチェックするために、他のセンサーも、設けてもよい。
【0060】
廃棄に続いて、ロボット移送システム510によって、廃棄ユニット18から、空になった収納ラックを引き出す。引き込みの間、ロボット移送システム510上に置かれたセンサー528は、収納ラックSR中に管が残っているかどうかを検出する。もしこの場合には、非適合状態が検出され、またさらなる処理の前に、高さでよりスペースを割り当てられる収納部分14の上部棚110の1つの上などの停止位置に、収納ラックSRは移送される。同じまたは他のセンサーも、収納ラックを収納する間に、管の高さが、たとえば、冷蔵庫16の2つの棚の間の距離により与えられるある閾値を越えていないことをチェックするなどの高さセンサーの機能を持っている。または、収納ラックを、手段行使台310の収納ラック結合素子312に移送する。ここで、収納ラック中に残っているサンプル管(S)は、異なったラック、たとえば、好ましくは、システムにより取り扱われるいかなる管の直径よりも典型的には大きい、たとえば直径2〜3cmまたはそれ以上のより大きな直径を含む廃棄ラック(WR)を頼りとすることになる。後ほど、廃棄ラック(WR)は、ロボット移送システム510によって、廃棄ユニット18に移送され、また廃棄手法は、反復される。必要により、全てのプロセスを、さらに多くの回数で反復してもよい。通常、廃棄ラック(WR)中での大きな直径の開口部の使用は、このことが起きるリスクを減少させる。
【0061】
このように、本発明の方法は、センサー528により、サンプル管Sが、廃棄後の収納ラックSR中に、残存しているかどうかを感知する工程と、肯定的には、収納ラックSRを停止位置に移送する工程および/または残ったサンプル管Sを廃棄ラックWRに預けて、廃棄手法を反復する工程とを含んでいてもよい。
【符号の説明】
【0062】
14 収納部分
18 廃棄ユニット
94 対応する開口部
110 棚
112 T−ピン
510 ロボット移送システム
518 台
526 連結素子
528 センサー
620 傾斜モジュール
622 ラック停止位置
640、642 廃棄容器
650 傾向板
【特許請求の範囲】
【請求項1】
−複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、該収納ラック(SR)からサンプル管を処分するための廃棄ユニット(18)と、
−該収納部分(14)中に、収納ラック(SR)を搭載するための、該収納部分(14)から収納ラック(SR)を取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニット(18)に持ってくるためのロボット移送システム(510)とから成っていることを特徴とする実験室サンプル管ラックの取扱用実験室システム。
【請求項2】
該ロボット移送システム(510)は、搬送される収納ラック(SR)と連結するための連結素子(526)であって、そこに連結されるときに、収納ラック(SR)上に押し/引き力を移す連結素子(526)と、移送される収納ラック(SR)を運ぶための台(518)とを含み、該台(518)は、高さ調整装置に接続され、
収納ラック(SR)が該台(518)上に引かれる場合には、該高さ調整装置が棚レベルに関してわずかに該台(518)を引き下げ、また収納ラック(SR)が、台(518)から押される場合には、該高さ調整装置が、棚レベルに関してわずかに上に、該台(518)を引き上げることを特徴とする請求項1記載の実験室システム。
【請求項3】
該連結素子(526)は、収納ラック(SR)の対応する開口部(94)と噛み合わせるためのL−形状のフックであることを特徴とする請求項2記載の実験室システム。
【請求項4】
各棚110は、収納ラック(SR)用の受取仕切りを形成するように、また該棚(110)上へ摺動するときに収納ラック(SR)の適当なガイドを提供するように、棚(110)上に配列された複数のT−ピン(112)を含むことを特徴とする請求項1〜3のいずれか1項に記載の実験室システム。
【請求項5】
該収納部分(14)の棚(110)は、収納位置中に十分に挿入された収納ラック(SR)を保持するための複数の高められた保持素子(114)からなる棚を含むことを特徴とする請求項1〜4のいずれか1項に記載の実験室システム。
【請求項6】
該廃棄ユニット(18)は、廃棄容器(640、642)上に置かれたラック停止位置を持った傾斜モジュール(620)を含み、収納ラック(SR)中に含まれるサンプル管(S)が、下の廃棄容器(640、642)中に落ちるように、該傾斜モジュール(620)は、ロボット移送システム(510)によってラック停止位置(622)中に搭載される該収納ラック(SR)上に傾斜するように設計されていることを特徴とする請求項1〜5のいずれか1項に記載の実験室システム。
【請求項7】
該ラック停止位置(622)は、収納ラック(SR)が傾斜モジュール(620)中に傾斜するときの位置において、収納ラック(SR)を保持するためのT−形状またはL−形状の断面を持ったガイド素子を含むことを特徴とする請求項6記載の実験室システム。
【請求項8】
落下サンプル管(S)を廃棄容器(640、642)中に導くために、該傾斜モジュール(620)と該廃棄容器(640、642)の間に、偏向板(650)が置かれていることを特徴とする請求項6または7のいずれか1項に記載の実験室システム。
【請求項9】
該ロボット移送システム(510)が、それ自身を測定することができる独習システムをさらに含み、該独習システムが、棚(110)に沿って定められた位置にマーキングを含むことを特徴とする請求項1〜8のいずれか1項に記載の実験室システム。
【請求項10】
該ロボット移送システム(110)は、収納ラック(SR)中での存在および/またはサンプル管(S)の高さを感知するためのセンサー(528)を含むことを特徴とする請求項1〜9のいずれか1項に記載の実験室システム。
【請求項11】
実験室システムの収納部分(14)であって、複数の収納ラック(SR)を収納するための複数の棚(110)を含む該収納部分(14)と、ゲートを経由して該収納部分(14)中に該収納ラック(SR)を搭載しまた該収納部分(14)から該収納ラック(SR)を取り出すためのロボット移送システム(510)とを操作する方法であって、初期操作の以下の工程;
−該ロボット移送システム(510)が、トップ棚または底棚の1つに向けて移動する;
−該ロボット移送システム(510)が、トップ棚または底棚の第1端に向けて移動しかつセンサーによって、第1収納ラック端位置を定める第1マーキングを同定する;
−ロボット移送システム(510)が、トップ棚または底棚に沿って反対の棚端に向けて移動しかつセンサーによって、第1および第2収納ラック端位置の間の距離を測定することにより、第2収納ラック端位置を定める第2マーキングを同定する;
−該ロボット移送システム(510)が、センサーによって、第2および第3収納ラック端位置の間の距離を測定することにより、それが、第3収納ラック端位置を定める第3マーキングを同定するまで、トップ棚または底棚の各他の1つに対して垂直に移動し;
−該ロボット移送システム(510)が、棚に沿って反対の棚端に向けて移動しかつセンサーによって、第3および第4収納ラック端位置の間の距離を測定することにより、第4収納ラック端位置を定める第4マーキングを同定する;
−該ロボット移送システム(510)のCPU中で、水平収納ラック端位置間の距離を、収納ラック位置の数で割ることにより、また垂直収納ラック端位置間の距離を、棚の数により割ることにより、各収納位置間の距離を計算する;ならびに
−4つの収納ラック端位置の絶対座標を蓄える工程を含むことを特徴とする方法。
【請求項12】
−複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、
−廃棄ユニット(18)と、
−ロボット移送システム(510)とから成っている実験室システム中の実験室サンプル管ラックの取扱方法であって、
a)ロボット移送システム(510)により、ゲートを経由して、収納ラック(SR)を、収納部分(14)中に搭載する工程と、
b)必要により、ゲートを経由して、ロボット移送システム(510)により、収納ラック(SR)を収納部分(14)から取り出す工程と、
c)所定の時間後に、ロボット移送システム(510)により、収納ラック(SR)を廃棄ユニット(18)中に持ち込む工程と、
d)廃棄ユニット(18)を経由して、サンプル管を廃棄する工程とから成ることを特徴とする方法。
【請求項13】
e)センサー(528)により、サンプル管(S)が、廃棄後の収納ラック(SR)中に、残存しているかどうかを感知する工程と、
f)収納ラック(SR)を停止位置に移送する工程および/または残ったサンプル管(S)を、異なった収納ラック(SR)に預けて、c)およびd)工程を反復する工程をさらに含んでいることを特徴とする請求項12記載の方法。
【請求項1】
−複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、該収納ラック(SR)からサンプル管を処分するための廃棄ユニット(18)と、
−該収納部分(14)中に、収納ラック(SR)を搭載するための、該収納部分(14)から収納ラック(SR)を取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニット(18)に持ってくるためのロボット移送システム(510)とから成っていることを特徴とする実験室サンプル管ラックの取扱用実験室システム。
【請求項2】
該ロボット移送システム(510)は、搬送される収納ラック(SR)と連結するための連結素子(526)であって、そこに連結されるときに、収納ラック(SR)上に押し/引き力を移す連結素子(526)と、移送される収納ラック(SR)を運ぶための台(518)とを含み、該台(518)は、高さ調整装置に接続され、
収納ラック(SR)が該台(518)上に引かれる場合には、該高さ調整装置が棚レベルに関してわずかに該台(518)を引き下げ、また収納ラック(SR)が、台(518)から押される場合には、該高さ調整装置が、棚レベルに関してわずかに上に、該台(518)を引き上げることを特徴とする請求項1記載の実験室システム。
【請求項3】
該連結素子(526)は、収納ラック(SR)の対応する開口部(94)と噛み合わせるためのL−形状のフックであることを特徴とする請求項2記載の実験室システム。
【請求項4】
各棚110は、収納ラック(SR)用の受取仕切りを形成するように、また該棚(110)上へ摺動するときに収納ラック(SR)の適当なガイドを提供するように、棚(110)上に配列された複数のT−ピン(112)を含むことを特徴とする請求項1〜3のいずれか1項に記載の実験室システム。
【請求項5】
該収納部分(14)の棚(110)は、収納位置中に十分に挿入された収納ラック(SR)を保持するための複数の高められた保持素子(114)からなる棚を含むことを特徴とする請求項1〜4のいずれか1項に記載の実験室システム。
【請求項6】
該廃棄ユニット(18)は、廃棄容器(640、642)上に置かれたラック停止位置を持った傾斜モジュール(620)を含み、収納ラック(SR)中に含まれるサンプル管(S)が、下の廃棄容器(640、642)中に落ちるように、該傾斜モジュール(620)は、ロボット移送システム(510)によってラック停止位置(622)中に搭載される該収納ラック(SR)上に傾斜するように設計されていることを特徴とする請求項1〜5のいずれか1項に記載の実験室システム。
【請求項7】
該ラック停止位置(622)は、収納ラック(SR)が傾斜モジュール(620)中に傾斜するときの位置において、収納ラック(SR)を保持するためのT−形状またはL−形状の断面を持ったガイド素子を含むことを特徴とする請求項6記載の実験室システム。
【請求項8】
落下サンプル管(S)を廃棄容器(640、642)中に導くために、該傾斜モジュール(620)と該廃棄容器(640、642)の間に、偏向板(650)が置かれていることを特徴とする請求項6または7のいずれか1項に記載の実験室システム。
【請求項9】
該ロボット移送システム(510)が、それ自身を測定することができる独習システムをさらに含み、該独習システムが、棚(110)に沿って定められた位置にマーキングを含むことを特徴とする請求項1〜8のいずれか1項に記載の実験室システム。
【請求項10】
該ロボット移送システム(110)は、収納ラック(SR)中での存在および/またはサンプル管(S)の高さを感知するためのセンサー(528)を含むことを特徴とする請求項1〜9のいずれか1項に記載の実験室システム。
【請求項11】
実験室システムの収納部分(14)であって、複数の収納ラック(SR)を収納するための複数の棚(110)を含む該収納部分(14)と、ゲートを経由して該収納部分(14)中に該収納ラック(SR)を搭載しまた該収納部分(14)から該収納ラック(SR)を取り出すためのロボット移送システム(510)とを操作する方法であって、初期操作の以下の工程;
−該ロボット移送システム(510)が、トップ棚または底棚の1つに向けて移動する;
−該ロボット移送システム(510)が、トップ棚または底棚の第1端に向けて移動しかつセンサーによって、第1収納ラック端位置を定める第1マーキングを同定する;
−ロボット移送システム(510)が、トップ棚または底棚に沿って反対の棚端に向けて移動しかつセンサーによって、第1および第2収納ラック端位置の間の距離を測定することにより、第2収納ラック端位置を定める第2マーキングを同定する;
−該ロボット移送システム(510)が、センサーによって、第2および第3収納ラック端位置の間の距離を測定することにより、それが、第3収納ラック端位置を定める第3マーキングを同定するまで、トップ棚または底棚の各他の1つに対して垂直に移動し;
−該ロボット移送システム(510)が、棚に沿って反対の棚端に向けて移動しかつセンサーによって、第3および第4収納ラック端位置の間の距離を測定することにより、第4収納ラック端位置を定める第4マーキングを同定する;
−該ロボット移送システム(510)のCPU中で、水平収納ラック端位置間の距離を、収納ラック位置の数で割ることにより、また垂直収納ラック端位置間の距離を、棚の数により割ることにより、各収納位置間の距離を計算する;ならびに
−4つの収納ラック端位置の絶対座標を蓄える工程を含むことを特徴とする方法。
【請求項12】
−複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、
−廃棄ユニット(18)と、
−ロボット移送システム(510)とから成っている実験室システム中の実験室サンプル管ラックの取扱方法であって、
a)ロボット移送システム(510)により、ゲートを経由して、収納ラック(SR)を、収納部分(14)中に搭載する工程と、
b)必要により、ゲートを経由して、ロボット移送システム(510)により、収納ラック(SR)を収納部分(14)から取り出す工程と、
c)所定の時間後に、ロボット移送システム(510)により、収納ラック(SR)を廃棄ユニット(18)中に持ち込む工程と、
d)廃棄ユニット(18)を経由して、サンプル管を廃棄する工程とから成ることを特徴とする方法。
【請求項13】
e)センサー(528)により、サンプル管(S)が、廃棄後の収納ラック(SR)中に、残存しているかどうかを感知する工程と、
f)収納ラック(SR)を停止位置に移送する工程および/または残ったサンプル管(S)を、異なった収納ラック(SR)に預けて、c)およびd)工程を反復する工程をさらに含んでいることを特徴とする請求項12記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−32515(P2010−32515A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−172309(P2009−172309)
【出願日】平成21年7月23日(2009.7.23)
【出願人】(501205108)エフ ホフマン−ラ ロッシュ アクチェン ゲゼルシャフト (285)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2009−172309(P2009−172309)
【出願日】平成21年7月23日(2009.7.23)
【出願人】(501205108)エフ ホフマン−ラ ロッシュ アクチェン ゲゼルシャフト (285)
【Fターム(参考)】
[ Back to top ]