
サーボ制御信号生成装置、光ディスク装置及びサーボ制御信号生成方法
【課題】ハイトゥーローメディアとロートゥーハイメディアに対応してディフェクト信号とミラー信号を生成する。
【解決手段】光ディスクの種類を判別して、RF信号のトップエンベロープ信号とボトムエンベロープ信号とを切り換えてディフェクト信号、ミラー信号を生成する。光ディスクの反射光からRF信号を生成するRF生成手段と、RF信号から光ディスクの種類を判別するディスク判別手段と、RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備え、ディスクが記録前に対して記録後に反射率が低下するディスクのときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、反射率が上昇するディスクのときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成する。
【解決手段】光ディスクの種類を判別して、RF信号のトップエンベロープ信号とボトムエンベロープ信号とを切り換えてディフェクト信号、ミラー信号を生成する。光ディスクの反射光からRF信号を生成するRF生成手段と、RF信号から光ディスクの種類を判別するディスク判別手段と、RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備え、ディスクが記録前に対して記録後に反射率が低下するディスクのときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、反射率が上昇するディスクのときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ディフェクト信号とミラー信号を検出するサーボ制御信号生成装置およびそれを用いた光ディスク装置に関する。
【背景技術】
【0002】
光ディスクの再生を行う際、光ディスク表面にゴミが付着していたり傷がついていたりするとサーボ信号が乱れてしまい、正確なサーボ制御を行うことができない。そこで、RF信号からゴミや傷などのディフェクト部を検出するディフェクト信号を生成して、ディフェクト期間中はサーボ制御をホールド動作させることでゴミや傷などにおけるサーボ制御の過渡応答を安定化させることができる。ディフェクト信号の生成方法としては、RF信号のトップエンベロープを用いる方法が開示されている。例えば、特許文献1参照。
【0003】
また、光ディスク装置は、光ディスクの所望のアドレス位置に光ピックアップをディスク半径方向へ移動させるシーク動作の際に、横断トラック数をカウントするためにミラー信号を用いることができる。また、シーク動作最後のトラッキング引き込み時に、ミラー信号とトラッキングゼロクロス信号の位相関係を用いてトラッキングブレーキパルスを生成して、このトラッキングブレーキパルスによってトラッキング駆動信号のうち対物レンズの移動方向とは逆の方法に作用する駆動信号のみを出力するトラッキングブレーキ動作を行う。ミラー信号の生成方法としては、RF信号のボトムエンベロープを用いる方法が開示されている。例えば、特許文献2参照。
また、現在広く普及しているCD−RやDVD−Rなどの追記型光ディスクは、記録膜の反射率が記録前に比べて記録後に低くなるタイプが一般的であるが、このような光ディスクとは逆に記録前に比べて記録後の反射率が高くなる光ディスクも提案されている。例えば、特許文献3参照。以降、記録前に比べて記録後の反射率が低くなるタイプの光ディスクをHigh to Lowメディア、記録前に比べて記録後の反射率が高くなる光ディスクをLow to Highメディアと呼ぶ。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−21547号公報
【特許文献2】特開2003−242658号公報
【特許文献3】特許2512087号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一台の光ディスク装置が前記High to Low メディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を生成しようとすると以下の問題点が発生する。
最初に、1つめの問題点としてディフェクト信号生成に関する問題について図1を用いて説明する。
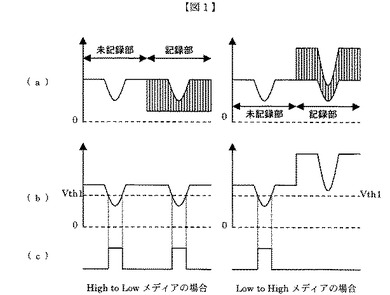
図1は、RF信号のトップエンベロープからディフェクト信号を生成する従来技術の場合における各信号波形である。なお、図1の左側の波形はHigh to Low メディアの場合における各波形であり、右側の波形はLow to Highメディアの場合における各波形である。
【0006】
図1(a)は、RF信号波形であり、未記録部および記録部においてゴミなどのディフェクトのためにRF信号のレベルが低下している。なお、図1において未記録部および記録部のディフェクトの大きさは同じであるものとする。
図1(b)は、RF信号のトップエンベロープである。
図1(c)は、ディフェクト信号であり、トップエンベロープ(b)と閾値電圧Vth1を比較し、トップエンベロープ(b)がVth1より小さい期間においてディフェクトを示すHighレベルとなる。
【0007】
図1(c)において、High to Lowメディアの場合は、未記録部および記録部のディフェクトを正しく検出できている。一方、Low to Highメディアの場合、未記録部ではディフェクトを正しく検出できているが記録部ではディフェクトを検出できていない。この原因は、Low to Highメディアの場合、未記録部と記録部の各ディフェクト部におけるトップエンベロープのDCレベルが異なるためである。この問題を解決するには、光ディスク装置に装着された光ディスクがLow to Highメディアであった場合、未記録部と記録部で閾値電圧Vth1の設定を切り換える方法が考えられるが、方式が複雑になってしまう。
【0008】
次に、2つめの問題点としてミラー信号生成に関する問題について図2を用いて説明する。
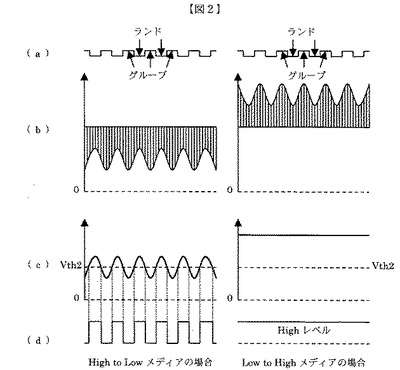
図2は、RF信号のボトムエンベロープからミラー信号を生成する従来技術の場合における各信号波形である。なお、図2の左側の波形はHigh to Lowメディアの場合における各波形であり、右側の波形はLow to High メディアの場合における各波形である。
図2(a)は、記録膜の断面図であり、ランド・グルーブ構造を有している。なお、記録マークはグループにのみ形成されるものとし、既にグルーブには情報が記録されているものとする。
図2(b)は、トラッキング制御オフ状態においてレーザスポットがトラックを横断しているときのRF信号である。High to Lowメディア、Low to Highメディア共に、記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。このことは、RF信号が記録トラック/未記録トラックによる変調を受けていることと同義であり、High to Lowメディアの場合はボトムエンベロープが変調を受けており、Low to Highメディアはトップエンベロープが変調を受けている。
図2(c)は、RF信号のボトムエンベロープである。
図2(d)は、ミラー信号であり、ボトムエンベロープ(c)と閾値電圧Vth2を比較し、ボトムエンベロープ(c)がVth2より大きい期間にHighレベルとなる。ランド・グルーブ構造を有する光ディスクにおいてランドまたはグルーブのどちらか一方に記録を行う場合、記録を行わない方をミラー面と定義する。つまり本説明の場合はランドがミラー面である。よって、ミラー信号(d)がHighの時には光ピックアップから照射されたレーザスポットはミラー面であるランドに位置していることを示すことになる。
図2においてHigh to Lowメディアの場合、ミラー信号(d)はランド部においてHighレベルとなり、正しくミラー面を検出している。一方、Low to Highメディアの場合、ボトムエンベロープ(c)がVth2よりも大きいレベルのためミラー信号(d)は常にHighレベルとなってしまい、ミラー面を正しく検出できない。なお、Low to Highメディアのボトムエンベロープはミラー面と記録トラックによる変調を受けていないため、DCレベルを除去しても正しくミラー信号を検出することはできない
以上の2つの問題に鑑みて本発明の目的は、High to LowメディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を正しく生成することができる光ディスク装置を提供することである。
【課題を解決するための手段】
【0009】
本発明は、記録前の反射率に対して記録後の反射率が低くなる光ディスクと、記録前の反射率に対して記録後の反射率が高くなる光ディスクの両方の再生に対応する光ディスク装置において、ディフェクト信号とミラー信号を生成する光ディスク装置である。
【0010】
記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、 前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、記録前に対して記録後に反射率が上昇するディスクと判別したときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成する構成とする。
【0011】
または、記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号を、上昇するディスクと判別したときはボトムエンベロープ信号を選択して出力する第1の選択手段と、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはボトムエンベロープ信号を、上昇するディスクと判別したときはトップエンベロープ信号を選択して出力する第2の選択手段と、 前記第1の選択手段の出力信号レベルが第1の所定レベルよりも小さい期間を検出する第1の検出手段と、 前記第2の選択手段の出力信号からDC成分を除去する低域除去手段と、 前記低域除去手段の出力信号レベルが第2の所定レベルよりも大きい期間を検出する第2の検出手段とを備えて、 前記第1の検出手段の出力信号をディフェクト信号とし、前記第2の検出手段の出力信号をミラー信号とする構成としてもよい。
もしくは、記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、 前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と、 前記トップエンベロープ信号とボトムエンベロープ信号を切り換えて出力する切り換え手段と、 前記切り換え手段の出力からDC成分を除去する低域除去手段と、 前記低域除去手段の出力のトップレベルをホールドするトップホールド手段と、 前記低域除去手段の出力のボトムレベルをホールドするボトムホールド手段と、 前記トップホールド手段の出力信号と前記ボトムホールド手段の出力信号を分圧した信号を出力する分圧手段と、 前記低域除去手段の出力と前記分圧手段の出力とを比較して比較結果である2値化信号をミラー信号として出力する比較手段とを備えて、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときは前記切り換え手段はボトムエンベロープ信号を出力し、記録前に対して記録後に反射率が上昇するディスクと判別したときは前記切り換え手段はトップエンベロープ信号を出力する構成としてもよい。
【0012】
なお、前記分圧手段は、前記トップホールド手段と前記ボトムホールド手段の出力信号を1:1に分圧する構成が望ましい。
【0013】
また、これらのサーボ制御信号生成装置は、前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときと記録後に反射率が上昇すると判別したときで、前記ミラー信号の極性を切り換える構成としてもよい。
【0014】
もしくは、これらのディスク判別装置は、BCA領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別する構成としてもよい。
さらに、前記ディスク判別装置は、リードイン領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別する構成が望ましい。
なお、これらのサーボ制御信号生成装置を備える光ディスク装置において、前記ディフェクト信号がディフェクトを検出した期間においてサーボ制御をホールド動作とする構成とする。
【0015】
または、これらのサーボ制御信号生成装置を備える光ディスク装置において、前記ミラー信号を用いて横断トラック数をカウントする構成としてもよい。
【発明の効果】
【0016】
High to LowメディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を生成することができる。
【図面の簡単な説明】
【0017】
【図1】従来技術におけるディフェクト信号の生成過程を示す波形図である。
【図2】従来技術におけるミラー信号の生成過程を示す波形図である。
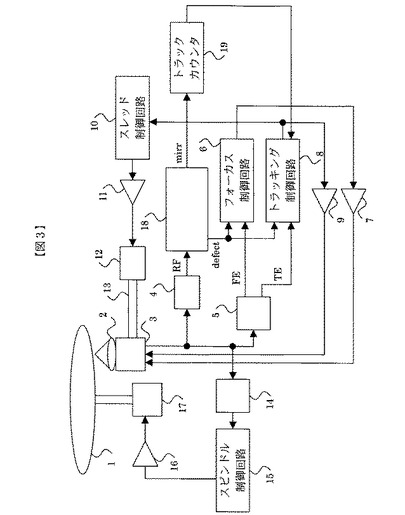
【図3】本発明の第1の実施例を示す光ディスク装置のブロック図である。
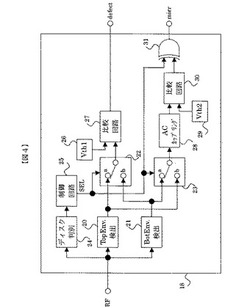
【図4】本発明の第1の実施例を示すサーボ制御信号生成回路のブロック図である。
【図5】本発明の第1の実施例におけるディフェクト信号の生成過程を示す波形図である。
【図6】本発明の第1の実施例におけるミラー信号の生成過程を示す波形図である。
【図7】本発明の第2の実施例を示すサーボ制御信号生成回路のブロック図である。
【図8】本発明の第2の実施例におけるミラー信号の生成過程を示す波形図である。
【発明を実施するための形態】
【0018】
以下、本発明における実施例について説明する。
【実施例1】
【0019】
以下、本発明における第1の実施例について説明する。
【0020】
図3は、本発明を用いた光ディスク装置の一例を示すブロック図である。
【0021】
符号1は、光ディスクであり、相変化膜または有機膜を用いた記録層を有しており、記録層にデータを記録することができる。また、記録トラックはランド・グルーブ構造を有しており、さらに記録トラックは一定の周期で蛇行(ウォブリング)するよう形成されている。以下、記録トラックの蛇行をウォブルと呼ぶ。
【0022】
符号2は、対物レンズであり、光ピックアップ3から出射されたレーザ光を光ディスク1の記録面上に集光する。
【0023】
符号3は、光ピックアップであり、レーザ光源、フォーカスアクチュエータ、トラッキングアクチュエータなどを備える。また、公知の4分割光検出器を備えて、光ディスク1からの反射光量を検出した検出信号を出力する。
【0024】
符号4は、RF信号生成回路であり、光ピックアップ3が出力する検出信号にイコライズ処理を行いRF信号として出力する。
【0025】
符号5は、サーボエラー信号生成回路であり、光ピックアップ3が出力する検出信号から、サーボ制御に用いるフォーカスエラー信号(以下FE信号と呼ぶ)およびトラッキングエラー信号(以下TE信号と呼ぶ)を生成する。
【0026】
符号6は、フォーカス制御回路であり、FE信号に対してゲインと位相の補償を行った信号をフォーカス駆動信号として出力する。また、サーボ制御信号生成回路18が出力するディフェクト信号(以下、defect信号と呼ぶ)に応じて、ディフェクト期間はフォーカス制御モードをホールド動作させる。
【0027】
符号7は、ドライバ回路であり、フォーカス駆動信号を増幅して、光ピックアップ3内のフォーカスアクチュエータにその出力を供給する。
【0028】
符号8は、トラッキング制御回路であり、TE信号に対してゲインと位相の補償を行った信号をトラッキング駆動信号として出力する。また、サーボ制御信号生成回路18が出力するdefect信号に応じて、ディフェクト期間はトラッキング制御モードをホールド動作させる。さらに、シーク時は、トラックカウンタ19が出力する横断トラック数に応じてシーク動作を行う。
【0029】
符号9は、ドライバ回路であり、トラッキング駆動信号を増幅して、光ピックアップ3内のトラッキングアクチュエータにその出力を供給する。
【0030】
符号10は、スレッド制御回路であり、トラッキング駆動信号の出力に対して、そのDC成分を抽出して、ゲインと位相の補償を行った信号をスレッド駆動信号として出力する。
【0031】
符号11は、ドライバ回路であり、スレッド駆動信号を増幅して出力する。
【0032】
符号12は、スレッドモータであり、ドライバ回路11の出力に応じて動作する。
【0033】
符号13は、リードスクリュであり、スレッドモータ12に接続されており、スレッドモータ12の回転に応じて、光ピックアップ3を半径方向に移動させる。
【0034】
符号14は、ウォブル信号検出回路であり、光ピックアップ3が出力する検出信号から光ディスク1のウォブルに同期したクロック信号を検出して出力する。
【0035】
符号15は、スピンドル制御回路であり、出力信号はスピンドル駆動信号である。スピンドル制御回路15は、ウォブル信号検出回路14の出力するクロック信号が一定周期になるようにスピンドルモータ17の回転を制御する。ウォブルは一定周期で記録トラックに形成されているので、光ディスク1は線速度一定(CLV:Constant Linear Velocity)で回転する。
【0036】
符号16は、ドライバ回路であり、スピンドル駆動信号を増幅して出力する。
【0037】
符号17は、スピンドルモータであり、ドライバ回路16の出力に応じて回転する。
【0038】
符号18は、サーボ制御信号生成回路であり、RF信号を用いてdefect信号およびミラー信号(以下mirr信号と呼ぶ)を生成して出力する。サーボ制御信号生成回路18は、本発明と従来の技術において最も異なる部分であり、その詳細動作は後述する。
【0039】
符号19は、トラックカウンタであり、シーク時にmirr信号のエッジをカウントして横断トラック数を求める。
【0040】
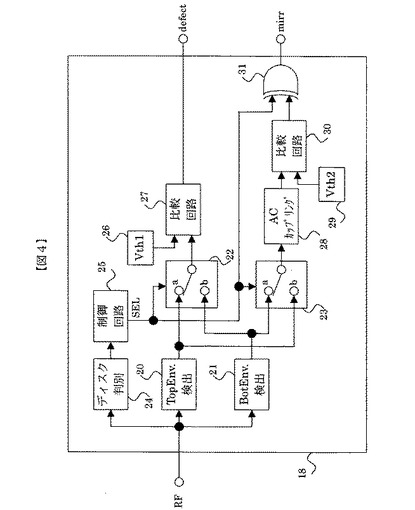
次に、サーボ制御信号生成回路18の詳細について更に図4を用いて説明する。
【0041】
符号20は、トップエンベロープ検出回路であり、RF信号のトップエンベロープを検出して出力する。
【0042】
符号21は、ボトムエンベロープ検出回路であり、RF信号のボトムエンベロープを検出して出力する。
【0043】
符号22は選択回路であり、入力端子aにはトップエンベロープ検出回路20の出力信号が、入力端子bにはボトムエンベロープ検出回路21の出力信号が接続されている。また、選択回路22は、制御回路25が出力するSEL信号がLowレベルときに入力端子a側に、Highレベルのときに入力端子b側に切り換り、入力信号を選択して出力する。
【0044】
符号23は選択回路であり、入力端子aにはボトムエンベロープ検出回路21の出力信号が、入力端子bにはトップエンベロープ検出回路20の出力信号が接続されている。また、選択回路23は、制御回路25が出力するSEL信号がLowレベルときに入力端子a側に、Highレベルのときに入力端子b側に切り換り、入力信号を選択して出力する。
【0045】
符号24は、ディスク判別回路であり、RF信号から光ディスク装置に装着されているディスクがHigh to Lowメディアか、Low to Highメディアかを判別して制御回路25に判別結果を伝達する。
【0046】
符号25は、制御回路であり、ディスク判別回路24が出力するディスク判別結果に応じて、切り換えスイッチ22,23を制御するSEL信号をLowまたHighに切り換えて出力する。本実施例では、ディスク判別結果がHigh to Lowメディアの場合にSEL信号はLowに、Low to Highメディアの場合にSEL信号はHighに設定されるものとする。
【0047】
符号26は、第1の閾値電圧であり、電圧Vth1を出力する。
【0048】
符号27は、第1の比較回路であり、選択回路22の出力と電圧Vth1を比較して、選択回路22の出力が電圧Vth1より小さい場合にHighレベルを、大きい場合にLowレベルをdefect信号として出力する。
【0049】
符号28は、ACカップリング回路であり、選択回路23の出力からDC成分をカットしてAC成分を出力する。
【0050】
符号29は、第2の閾値電圧であり、電圧Vth2を出力する。本実施例では0レベルが設定されているものとする。
【0051】
符号30は、第2の比較回路であり、ACカップリング回路28の出力と電圧Vth2を比較して、ACカップリング回路28の出力が電圧Vth2より大きい場合にHighレベルを、小さい場合にLowレベルを出力する。
【0052】
符号31は、排他的論理和回路であり、2つの入力のうち一方には第2の比較回路30の出力信号が接続されており、他方には制御回路25が出力するSEL信号が接続されている。SEL信号がLowレベルつまりHigh to Lowメディアのときは、第2の比較回路30の出力がそのまま出力され、SEL信号がHighレベルつまりLow to Highメディアのときは、第2の比較回路30の出力が反転されて出力される。つまり、排他的論理和回路31は極性反転回路として動作し、その出力をmirr信号とする。
【0053】
以上の構成において、スピンドルモータ17が定常回転している状態で、光ディスク装置は、装着されている光ディスク1がHigh to LowメディアかLow to Highメディアのどちらであるかを判別する。
【0054】
ディスク判別の方法としては、光ディスクの記録面にフォーカス制御をONにした後に、対物レンズ2の位置をディスク内周部に予め記録されているBCA(Burst Cutting Area)に位置付けて、ディスク判別回路24がBCAデータを再生して、再生データに含まれるディスクIDから光ディスクの種類を判別することができる。または、BCAデータにHigh to LowメディアかLow to Highメディアを示すビットが定義されていればそれを用いてディスクの種類を判別してもよい。
【0055】
なお、BCAが記録されていないディスクであれば、ディスク内周部のリードイン領域にシークして、リードイン領域に記録されているディスクIDを読み出してHigh to LowメディアかLow to Highメディアを判別することができる。
【0056】
ディスクの判別結果を受けて、制御回路25は、光ディスク1がHigh to Lowメディアの場合はSEL信号にLowレベルを、光ディスク1がLow to Highメディアの場合はSEL信号にHighレベルを出力する。
【0057】
以上の動作によって生成されるdefect信号とmirr信号について、High to Lowメディアの場合とLow to Highメディアの場合に分けて説明する。
【0058】
まず、High to Lowメディアの場合について説明する。
【0059】
制御回路25は、SEL信号にLowレベルを出力しているので、選択回路22,23は共に入力a側に切り換っており、トップエンベロープ検出回路20が出力するRF信号のトップエンベロープ信号が選択回路22を介して第1の比較回路27に入力される。そのため、トップエンベロープ信号と第1の閾値電圧26が出力する電圧Vth1とが比較回路27によって比較されて、トップエンベロープ信号が電圧Vth1よりも小さい期間において比較回路27の出力はHighとなるので、比較回路27の出力波形は図1の波形(c)の左側に示した波形と同様のdefect信号になる。
【0060】
また、ボトムエンベロープ検出回路21が出力するRF信号のボトムエンベロープ信号が選択回路23およびACカップリング回路28を介して第2の比較回路30に入力されので、ボトムエンベロープ信号と第2の閾値電圧29が出力する電圧Vth2とが比較回路30によって比較されてmirr信号が生成される。なお、排他的論理回路30に入力されるSEL信号はLowレベルなので、mirr信号は極性反転されず図2の波形(d)の左側に示した波形と同様になる。
【0061】
以上のように、High to Lowメディアの場合におけるdefect信号およびmirr信号は、図1および図2に示した従来波形と同様となる。
【0062】
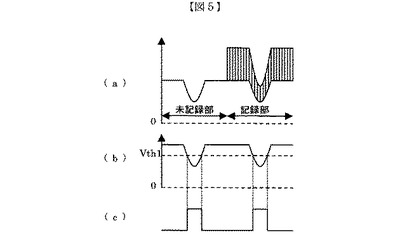
次に、Low to Highメディアの場合について説明する。 制御回路25は、SEL信号にHighレベルを出力しているので、選択回路22,23は共に入力b側に切り換っている。そのため、ボトムエンベロープ検出回路21が出力するRF信号のボトムエンベロープ信号が選択回路22を介して第1の比較回路27に入力される。この場合の各信号波形を図5に示す。
【0063】
図5(a)は、図1(a)の右側の波形と同じLow to HighメディアのRF信号波形であり、未記録部と記録部にそれぞれディフェクト部によるRF信号のレベル低下が存在する。
【0064】
図5(b)は、選択回路22を介して第1の比較回路27に入力されるRF信号(a)のボトムエンベロープである。
【0065】
図5(c)は、比較回路27が出力するdefect信号であり、ボトムエンベロープ信号(b)が電圧Vth1より小さい期間でHigh レベルとなる。これより、図1(c)の右側波形で示した従来技術のdefect信号に対して、図5(c)に示す本実施例のdefect信号は未記録部と記録部の両方のディフェクトを正しく検出できていることが分かる。
【0066】
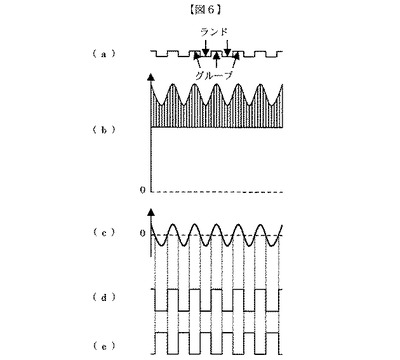
また、トップエンベロープ検出回路20が出力するRF信号のトップトエンベロープ信号が選択回路23およびACカップリング回路28を介して第2の比較回路30に入力される。この場合の各信号波形を図6に示す。
【0067】
図6(a)は、記録膜の断面図であり、ランド・グルーブ構造を有している。なお、図1(a)と同様に記録マークはグループにのみ形成されるものとし、既にグルーブには情報が記録されているものとする。
図6(b)は、図2(b)右側と同様にLow to High メディアにおいてトラックを横断しているときのRF信号である。記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。
図6(c)は、ACカップリング回路28の出力であり、選択回路23を介して入力されるRF信号のトップエンベロープ信号である。
【0068】
図6(d)は、比較回路30の出力であり、トップエンベロープ信号(c)が電圧Vth2に設定されている0レベルより大きい期間にHighレベルとなる。
【0069】
図6(e)は、排他的論理和回路31の出力であり、SEL信号がHighレベルであるので比較回路30の出力(d)を極性反転したものである。RF信号(b)のレベルが低下している部分がミラー部となるランドであり、その期間において波形(e)はHighレベルとなっている。また、逆にRF信号のレベルが上がっている部分が記録部であるグルーブであり、その期間において波形(e)はLowレベルとなっている。よって、波形(e)からmirr部と記録トラックを判別可能であり、mirr信号として用いることができる。
【0070】
なお、図6の説明においてACカップリング回路28の出力波形(c)は0レベルが基準となるように出力しているが、任意のリファレンスレベルVrefを基準としてもよい。また、その場合は、第2の閾値電圧29の出力電圧Vth2は前記リファレンスレベルVrefに設定すれば、mirr信号は図6(e)と同様の波形になる。
【0071】
以上に説明した第1実施例の光ディスク装置は、装着された光ディスクの種類に応じて、defect信号およびmirr信号の生成対象信号をRF信号のトップエンベロープ信号またはボトムエンベロープ信号に切り換えるため、High to LowメディアとLow to Highメディアのどちらでもdefect信号とmirr信号を正しく生成することができる。
【実施例2】
【0072】
以下、本発明における第2の実施例について説明する。
【0073】
光ディスクにおいては、規格値の範囲内において反射率がディスク面内で変動することがある。そのためRF信号のボトムエンベロープ信号もディスク反射率の変動の影響を受けるので、mirr信号を正しく生成できないという問題が発生する。この問題を解決するために、ボトムエンベロープ信号のトップホールド信号とボトムホールド信号を生成し、それらの中間レベルをmirr信号生成のための閾値レベルとする技術が公知である。
【0074】
しかしながら、この方法をLow to Highメディアに適用しようとすると、図2(b)で説明したようにLow to Highメディアのボトムエンベロープは記録トラック/未記録トラックによる変調を受けていないため、正しくmirr信号を生成することができない。
【0075】
そこで、本実施例では、ディスク面内の反射率変動の影響を回避して、さらにHigh to Lowメディア及びLow to Highメディアの両方に対応してmirr信号を正確に生成可能な方法について説明する。
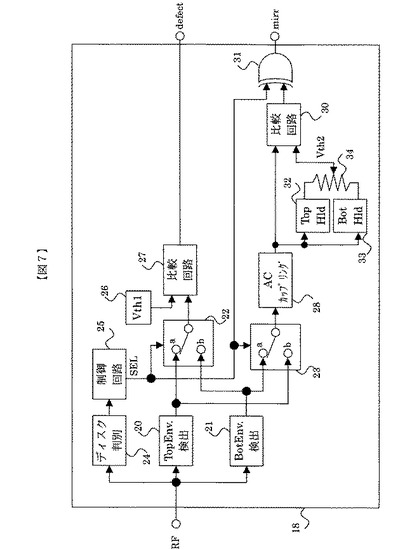
第2の実施例においては、第1の実施例に対してサーボ制御信号生成回路18のmirr信号生成部が異なっている。第2の実施例におけるサーボ制御信号生成回路18を図7に示す。以下、図7において第1の実施例と異なる部分について説明する。
【0076】
符号32は、トップホールド回路であり、ACカップリング回路32の出力のトップレベルをホールドしたトップホールド信号を出力する。入力信号レベルが現状のトップホール回路の出力信号レベルよりも大きければ、出力信号は入力信号に追従し、入力信号レベルが出力信号レベルよりも小さくなると所定の時定数をもって出力信号レベルは低下する。
【0077】
符号33は、ボトムホールド回路であり、ACカップリング回路32の出力のボトムレベルをホールドしたボトムホールド信号を出力する。入力信号レベルが現状のボトムホール回路の出力信号レベルよりも小さければ、出力信号は入力信号に追従し、入力信号レベルが出力信号レベルよりも大きくなると所定の時定数をもって出力信号レベルは上昇する。
【0078】
符号34は、可変抵抗であり、トップホールド回路32とボトムホールド回路33の出力を分圧して出力する。本実施例では、トップホールドレベルとボトムホールドレベルの中間レベルを出力するよう分圧比=1:1に設定されているものとする。
【0079】
第2実施例の比較回路30は、ACカップリング回路28の出力が可変抵抗34の出力よりも大きい場合にHighレベルを、小さい場合にLowレベルを出力する。
【0080】
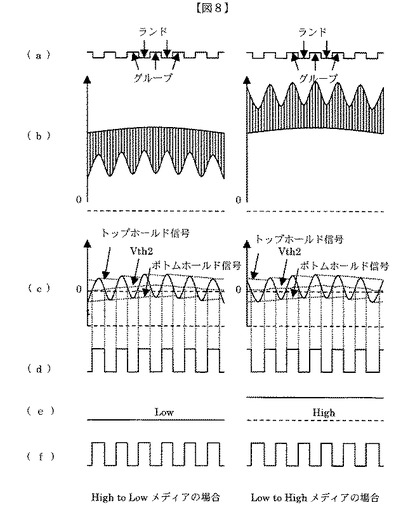
以上の構成における動作波形を図8に示す。図8において、左側がHigh to Lowメディアの場合であり、右側がLow to Highメディアの場合である。
【0081】
図8(a)は、図2(a)同様に記録膜の断面図であり、ランド・グルーブ構造を有している。なお、記録マークはグルーブだけに形成されるものとし、既にグルーブには情報が記録されているものとする。
【0082】
図8(b)は、トラッキング制御オフ状態においてトラックを横断しているときのRF信号である。High to Lowメディア、Low to Highメディア共に、記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。さらに、ディスク面内の反射率変動の影響を受けて、トップエンベロープとボトムエンベロープが変動している。このことは記録トラック/未記録トラックの変調を受けないHigh to Low メディアのRF信号のトップエンベロープ、およびLow to Highメディアのボトムエンベロープが変動していることからも確認できる。
【0083】
図8(c)は、ACカップリング回路28の出力であり、High to Lowメディアの場合はRF信号のボトムエンベロープ信号が、Low to Highメディアの場合はRF信号のトップエンベロープ信号が選択回路23によって選択されて出力されている。さらに図8(c)中に、トップホールド回路32が出力するトップホールド信号とボトムホールド回路33が出力するボトムホールド信号を示す。また、同じく図8(c)中に可変抵抗34が主力する閾値電圧Vth2を示す。閾値電圧Vth2は図8(c)中のトップホールド信号レベルとボトムホールド信号レベルの中間レベルである。
【0084】
図8(d)は、第2の比較回路30の出力波形であり、図8(c)のACカップリング回路出力信号レベルが閾値電圧Vth2よりも大きい期間でHighとなる。
【0085】
図8(e)は、制御回路25が出力するSEL信号であり、High to Lowメディアの場合はLowレベル、Low to Highレベルの場合はHighレベルである。
【0086】
図8(f)は、排他的論理和回路31が出力するmirr信号であり、High to Lowメディアの場合は、第2の比較回路30の出力波形(d)と同じであり、Low to Highメディアの場合は第2の比較回路30の出力波形(d)を極性反転したものとなる。
【0087】
ここで、図8のmirr信号(f)と記録膜断面図(a)を比較すると、mirr信号(f)がHighの期間はランドと一致しており、Lowの期間はグルーブと一致している。また、図8(a)で説明したようにグルーブに情報が記録されているので、ランドは情報が記録されていないミラー部となる。これらより、図8に示したmirr信号(f)は光ディスクのミラー部であるランドと一致しているので正しくミラー部を検出できていることが分かる。
【0088】
以上に説明した第2実施例の光ディスク装置は、記録トラック/未記録トラックの変調を受けたRF信号のエンベロープ信号のトップホールド信号とボトムエンベロープ信号からmirr信号を生成する閾値レベルを求めるので、光ディスクの反射率がディスク面内で変動しても正しくmirr信号を生成できる。さらには、mirr信号を生成するエンベロープ信号を、光ディスクの種類に応じてボトムエンベロープとトップエンベロープを切り換えるので、High to LowメディアとLow to Highメディアの両方に対応してmirr信号を正しく生成することができる。
【0089】
なお、第2の実施例において、可変抵抗34の分圧比は1:1と説明したが、ミラー信号のデューティ比が所望の値となるように0.95:1.05というように調整してもよい。
【符号の説明】
【0090】
1…光ディスク、2…対物レンズ、3…光ピックアップ、4…RF信号生成回路、5…サーボエラー信号生成回路、6…フォーカス制御回路、7,9,11,16…ドライバ回路、8…トラッキング制御回路、10…スレッド制御回路、12…スレッドモータ、13…リードスクリュ、14…ウォブル信号検出回路、15…スピンドル制御回路、17…スピンドルモータ、18…サーボ制御信号生成回路、19…トラックカウンタ、20…トップエンベロープ検出回路、21…ボトムエンベロープ検出回路、22,23…選択回路、24…ディスク判別回路、25…制御回路、26…第1の閾値電圧、27…第1の比較回路、28…ACカップリング回路、29…第2の閾値電圧、30…第2の比較回路、31…排他的論理和回路、32…トップホールド回路、33…ボトムホールド回路、34…可変抵抗
【技術分野】
【0001】
本発明は、ディフェクト信号とミラー信号を検出するサーボ制御信号生成装置およびそれを用いた光ディスク装置に関する。
【背景技術】
【0002】
光ディスクの再生を行う際、光ディスク表面にゴミが付着していたり傷がついていたりするとサーボ信号が乱れてしまい、正確なサーボ制御を行うことができない。そこで、RF信号からゴミや傷などのディフェクト部を検出するディフェクト信号を生成して、ディフェクト期間中はサーボ制御をホールド動作させることでゴミや傷などにおけるサーボ制御の過渡応答を安定化させることができる。ディフェクト信号の生成方法としては、RF信号のトップエンベロープを用いる方法が開示されている。例えば、特許文献1参照。
【0003】
また、光ディスク装置は、光ディスクの所望のアドレス位置に光ピックアップをディスク半径方向へ移動させるシーク動作の際に、横断トラック数をカウントするためにミラー信号を用いることができる。また、シーク動作最後のトラッキング引き込み時に、ミラー信号とトラッキングゼロクロス信号の位相関係を用いてトラッキングブレーキパルスを生成して、このトラッキングブレーキパルスによってトラッキング駆動信号のうち対物レンズの移動方向とは逆の方法に作用する駆動信号のみを出力するトラッキングブレーキ動作を行う。ミラー信号の生成方法としては、RF信号のボトムエンベロープを用いる方法が開示されている。例えば、特許文献2参照。
また、現在広く普及しているCD−RやDVD−Rなどの追記型光ディスクは、記録膜の反射率が記録前に比べて記録後に低くなるタイプが一般的であるが、このような光ディスクとは逆に記録前に比べて記録後の反射率が高くなる光ディスクも提案されている。例えば、特許文献3参照。以降、記録前に比べて記録後の反射率が低くなるタイプの光ディスクをHigh to Lowメディア、記録前に比べて記録後の反射率が高くなる光ディスクをLow to Highメディアと呼ぶ。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−21547号公報
【特許文献2】特開2003−242658号公報
【特許文献3】特許2512087号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一台の光ディスク装置が前記High to Low メディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を生成しようとすると以下の問題点が発生する。
最初に、1つめの問題点としてディフェクト信号生成に関する問題について図1を用いて説明する。
図1は、RF信号のトップエンベロープからディフェクト信号を生成する従来技術の場合における各信号波形である。なお、図1の左側の波形はHigh to Low メディアの場合における各波形であり、右側の波形はLow to Highメディアの場合における各波形である。
【0006】
図1(a)は、RF信号波形であり、未記録部および記録部においてゴミなどのディフェクトのためにRF信号のレベルが低下している。なお、図1において未記録部および記録部のディフェクトの大きさは同じであるものとする。
図1(b)は、RF信号のトップエンベロープである。
図1(c)は、ディフェクト信号であり、トップエンベロープ(b)と閾値電圧Vth1を比較し、トップエンベロープ(b)がVth1より小さい期間においてディフェクトを示すHighレベルとなる。
【0007】
図1(c)において、High to Lowメディアの場合は、未記録部および記録部のディフェクトを正しく検出できている。一方、Low to Highメディアの場合、未記録部ではディフェクトを正しく検出できているが記録部ではディフェクトを検出できていない。この原因は、Low to Highメディアの場合、未記録部と記録部の各ディフェクト部におけるトップエンベロープのDCレベルが異なるためである。この問題を解決するには、光ディスク装置に装着された光ディスクがLow to Highメディアであった場合、未記録部と記録部で閾値電圧Vth1の設定を切り換える方法が考えられるが、方式が複雑になってしまう。
【0008】
次に、2つめの問題点としてミラー信号生成に関する問題について図2を用いて説明する。
図2は、RF信号のボトムエンベロープからミラー信号を生成する従来技術の場合における各信号波形である。なお、図2の左側の波形はHigh to Lowメディアの場合における各波形であり、右側の波形はLow to High メディアの場合における各波形である。
図2(a)は、記録膜の断面図であり、ランド・グルーブ構造を有している。なお、記録マークはグループにのみ形成されるものとし、既にグルーブには情報が記録されているものとする。
図2(b)は、トラッキング制御オフ状態においてレーザスポットがトラックを横断しているときのRF信号である。High to Lowメディア、Low to Highメディア共に、記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。このことは、RF信号が記録トラック/未記録トラックによる変調を受けていることと同義であり、High to Lowメディアの場合はボトムエンベロープが変調を受けており、Low to Highメディアはトップエンベロープが変調を受けている。
図2(c)は、RF信号のボトムエンベロープである。
図2(d)は、ミラー信号であり、ボトムエンベロープ(c)と閾値電圧Vth2を比較し、ボトムエンベロープ(c)がVth2より大きい期間にHighレベルとなる。ランド・グルーブ構造を有する光ディスクにおいてランドまたはグルーブのどちらか一方に記録を行う場合、記録を行わない方をミラー面と定義する。つまり本説明の場合はランドがミラー面である。よって、ミラー信号(d)がHighの時には光ピックアップから照射されたレーザスポットはミラー面であるランドに位置していることを示すことになる。
図2においてHigh to Lowメディアの場合、ミラー信号(d)はランド部においてHighレベルとなり、正しくミラー面を検出している。一方、Low to Highメディアの場合、ボトムエンベロープ(c)がVth2よりも大きいレベルのためミラー信号(d)は常にHighレベルとなってしまい、ミラー面を正しく検出できない。なお、Low to Highメディアのボトムエンベロープはミラー面と記録トラックによる変調を受けていないため、DCレベルを除去しても正しくミラー信号を検出することはできない
以上の2つの問題に鑑みて本発明の目的は、High to LowメディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を正しく生成することができる光ディスク装置を提供することである。
【課題を解決するための手段】
【0009】
本発明は、記録前の反射率に対して記録後の反射率が低くなる光ディスクと、記録前の反射率に対して記録後の反射率が高くなる光ディスクの両方の再生に対応する光ディスク装置において、ディフェクト信号とミラー信号を生成する光ディスク装置である。
【0010】
記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、 前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、記録前に対して記録後に反射率が上昇するディスクと判別したときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成する構成とする。
【0011】
または、記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号を、上昇するディスクと判別したときはボトムエンベロープ信号を選択して出力する第1の選択手段と、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはボトムエンベロープ信号を、上昇するディスクと判別したときはトップエンベロープ信号を選択して出力する第2の選択手段と、 前記第1の選択手段の出力信号レベルが第1の所定レベルよりも小さい期間を検出する第1の検出手段と、 前記第2の選択手段の出力信号からDC成分を除去する低域除去手段と、 前記低域除去手段の出力信号レベルが第2の所定レベルよりも大きい期間を検出する第2の検出手段とを備えて、 前記第1の検出手段の出力信号をディフェクト信号とし、前記第2の検出手段の出力信号をミラー信号とする構成としてもよい。
もしくは、記録前に対して記録後に反射率が低下する光ディスクと上昇する光ディスクの両方への再生に対応するサーボ制御信号生成装置において、 光ディスクの反射光からRF信号を生成するRF生成手段と、 前記RF信号から光ディスクの種類を判別するディスク判別手段と、 前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、 前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と、 前記トップエンベロープ信号とボトムエンベロープ信号を切り換えて出力する切り換え手段と、 前記切り換え手段の出力からDC成分を除去する低域除去手段と、 前記低域除去手段の出力のトップレベルをホールドするトップホールド手段と、 前記低域除去手段の出力のボトムレベルをホールドするボトムホールド手段と、 前記トップホールド手段の出力信号と前記ボトムホールド手段の出力信号を分圧した信号を出力する分圧手段と、 前記低域除去手段の出力と前記分圧手段の出力とを比較して比較結果である2値化信号をミラー信号として出力する比較手段とを備えて、 前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときは前記切り換え手段はボトムエンベロープ信号を出力し、記録前に対して記録後に反射率が上昇するディスクと判別したときは前記切り換え手段はトップエンベロープ信号を出力する構成としてもよい。
【0012】
なお、前記分圧手段は、前記トップホールド手段と前記ボトムホールド手段の出力信号を1:1に分圧する構成が望ましい。
【0013】
また、これらのサーボ制御信号生成装置は、前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときと記録後に反射率が上昇すると判別したときで、前記ミラー信号の極性を切り換える構成としてもよい。
【0014】
もしくは、これらのディスク判別装置は、BCA領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別する構成としてもよい。
さらに、前記ディスク判別装置は、リードイン領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別する構成が望ましい。
なお、これらのサーボ制御信号生成装置を備える光ディスク装置において、前記ディフェクト信号がディフェクトを検出した期間においてサーボ制御をホールド動作とする構成とする。
【0015】
または、これらのサーボ制御信号生成装置を備える光ディスク装置において、前記ミラー信号を用いて横断トラック数をカウントする構成としてもよい。
【発明の効果】
【0016】
High to LowメディアとLow to Highメディアの両方に対応してディフェクト信号とミラー信号を生成することができる。
【図面の簡単な説明】
【0017】
【図1】従来技術におけるディフェクト信号の生成過程を示す波形図である。
【図2】従来技術におけるミラー信号の生成過程を示す波形図である。
【図3】本発明の第1の実施例を示す光ディスク装置のブロック図である。
【図4】本発明の第1の実施例を示すサーボ制御信号生成回路のブロック図である。
【図5】本発明の第1の実施例におけるディフェクト信号の生成過程を示す波形図である。
【図6】本発明の第1の実施例におけるミラー信号の生成過程を示す波形図である。
【図7】本発明の第2の実施例を示すサーボ制御信号生成回路のブロック図である。
【図8】本発明の第2の実施例におけるミラー信号の生成過程を示す波形図である。
【発明を実施するための形態】
【0018】
以下、本発明における実施例について説明する。
【実施例1】
【0019】
以下、本発明における第1の実施例について説明する。
【0020】
図3は、本発明を用いた光ディスク装置の一例を示すブロック図である。
【0021】
符号1は、光ディスクであり、相変化膜または有機膜を用いた記録層を有しており、記録層にデータを記録することができる。また、記録トラックはランド・グルーブ構造を有しており、さらに記録トラックは一定の周期で蛇行(ウォブリング)するよう形成されている。以下、記録トラックの蛇行をウォブルと呼ぶ。
【0022】
符号2は、対物レンズであり、光ピックアップ3から出射されたレーザ光を光ディスク1の記録面上に集光する。
【0023】
符号3は、光ピックアップであり、レーザ光源、フォーカスアクチュエータ、トラッキングアクチュエータなどを備える。また、公知の4分割光検出器を備えて、光ディスク1からの反射光量を検出した検出信号を出力する。
【0024】
符号4は、RF信号生成回路であり、光ピックアップ3が出力する検出信号にイコライズ処理を行いRF信号として出力する。
【0025】
符号5は、サーボエラー信号生成回路であり、光ピックアップ3が出力する検出信号から、サーボ制御に用いるフォーカスエラー信号(以下FE信号と呼ぶ)およびトラッキングエラー信号(以下TE信号と呼ぶ)を生成する。
【0026】
符号6は、フォーカス制御回路であり、FE信号に対してゲインと位相の補償を行った信号をフォーカス駆動信号として出力する。また、サーボ制御信号生成回路18が出力するディフェクト信号(以下、defect信号と呼ぶ)に応じて、ディフェクト期間はフォーカス制御モードをホールド動作させる。
【0027】
符号7は、ドライバ回路であり、フォーカス駆動信号を増幅して、光ピックアップ3内のフォーカスアクチュエータにその出力を供給する。
【0028】
符号8は、トラッキング制御回路であり、TE信号に対してゲインと位相の補償を行った信号をトラッキング駆動信号として出力する。また、サーボ制御信号生成回路18が出力するdefect信号に応じて、ディフェクト期間はトラッキング制御モードをホールド動作させる。さらに、シーク時は、トラックカウンタ19が出力する横断トラック数に応じてシーク動作を行う。
【0029】
符号9は、ドライバ回路であり、トラッキング駆動信号を増幅して、光ピックアップ3内のトラッキングアクチュエータにその出力を供給する。
【0030】
符号10は、スレッド制御回路であり、トラッキング駆動信号の出力に対して、そのDC成分を抽出して、ゲインと位相の補償を行った信号をスレッド駆動信号として出力する。
【0031】
符号11は、ドライバ回路であり、スレッド駆動信号を増幅して出力する。
【0032】
符号12は、スレッドモータであり、ドライバ回路11の出力に応じて動作する。
【0033】
符号13は、リードスクリュであり、スレッドモータ12に接続されており、スレッドモータ12の回転に応じて、光ピックアップ3を半径方向に移動させる。
【0034】
符号14は、ウォブル信号検出回路であり、光ピックアップ3が出力する検出信号から光ディスク1のウォブルに同期したクロック信号を検出して出力する。
【0035】
符号15は、スピンドル制御回路であり、出力信号はスピンドル駆動信号である。スピンドル制御回路15は、ウォブル信号検出回路14の出力するクロック信号が一定周期になるようにスピンドルモータ17の回転を制御する。ウォブルは一定周期で記録トラックに形成されているので、光ディスク1は線速度一定(CLV:Constant Linear Velocity)で回転する。
【0036】
符号16は、ドライバ回路であり、スピンドル駆動信号を増幅して出力する。
【0037】
符号17は、スピンドルモータであり、ドライバ回路16の出力に応じて回転する。
【0038】
符号18は、サーボ制御信号生成回路であり、RF信号を用いてdefect信号およびミラー信号(以下mirr信号と呼ぶ)を生成して出力する。サーボ制御信号生成回路18は、本発明と従来の技術において最も異なる部分であり、その詳細動作は後述する。
【0039】
符号19は、トラックカウンタであり、シーク時にmirr信号のエッジをカウントして横断トラック数を求める。
【0040】
次に、サーボ制御信号生成回路18の詳細について更に図4を用いて説明する。
【0041】
符号20は、トップエンベロープ検出回路であり、RF信号のトップエンベロープを検出して出力する。
【0042】
符号21は、ボトムエンベロープ検出回路であり、RF信号のボトムエンベロープを検出して出力する。
【0043】
符号22は選択回路であり、入力端子aにはトップエンベロープ検出回路20の出力信号が、入力端子bにはボトムエンベロープ検出回路21の出力信号が接続されている。また、選択回路22は、制御回路25が出力するSEL信号がLowレベルときに入力端子a側に、Highレベルのときに入力端子b側に切り換り、入力信号を選択して出力する。
【0044】
符号23は選択回路であり、入力端子aにはボトムエンベロープ検出回路21の出力信号が、入力端子bにはトップエンベロープ検出回路20の出力信号が接続されている。また、選択回路23は、制御回路25が出力するSEL信号がLowレベルときに入力端子a側に、Highレベルのときに入力端子b側に切り換り、入力信号を選択して出力する。
【0045】
符号24は、ディスク判別回路であり、RF信号から光ディスク装置に装着されているディスクがHigh to Lowメディアか、Low to Highメディアかを判別して制御回路25に判別結果を伝達する。
【0046】
符号25は、制御回路であり、ディスク判別回路24が出力するディスク判別結果に応じて、切り換えスイッチ22,23を制御するSEL信号をLowまたHighに切り換えて出力する。本実施例では、ディスク判別結果がHigh to Lowメディアの場合にSEL信号はLowに、Low to Highメディアの場合にSEL信号はHighに設定されるものとする。
【0047】
符号26は、第1の閾値電圧であり、電圧Vth1を出力する。
【0048】
符号27は、第1の比較回路であり、選択回路22の出力と電圧Vth1を比較して、選択回路22の出力が電圧Vth1より小さい場合にHighレベルを、大きい場合にLowレベルをdefect信号として出力する。
【0049】
符号28は、ACカップリング回路であり、選択回路23の出力からDC成分をカットしてAC成分を出力する。
【0050】
符号29は、第2の閾値電圧であり、電圧Vth2を出力する。本実施例では0レベルが設定されているものとする。
【0051】
符号30は、第2の比較回路であり、ACカップリング回路28の出力と電圧Vth2を比較して、ACカップリング回路28の出力が電圧Vth2より大きい場合にHighレベルを、小さい場合にLowレベルを出力する。
【0052】
符号31は、排他的論理和回路であり、2つの入力のうち一方には第2の比較回路30の出力信号が接続されており、他方には制御回路25が出力するSEL信号が接続されている。SEL信号がLowレベルつまりHigh to Lowメディアのときは、第2の比較回路30の出力がそのまま出力され、SEL信号がHighレベルつまりLow to Highメディアのときは、第2の比較回路30の出力が反転されて出力される。つまり、排他的論理和回路31は極性反転回路として動作し、その出力をmirr信号とする。
【0053】
以上の構成において、スピンドルモータ17が定常回転している状態で、光ディスク装置は、装着されている光ディスク1がHigh to LowメディアかLow to Highメディアのどちらであるかを判別する。
【0054】
ディスク判別の方法としては、光ディスクの記録面にフォーカス制御をONにした後に、対物レンズ2の位置をディスク内周部に予め記録されているBCA(Burst Cutting Area)に位置付けて、ディスク判別回路24がBCAデータを再生して、再生データに含まれるディスクIDから光ディスクの種類を判別することができる。または、BCAデータにHigh to LowメディアかLow to Highメディアを示すビットが定義されていればそれを用いてディスクの種類を判別してもよい。
【0055】
なお、BCAが記録されていないディスクであれば、ディスク内周部のリードイン領域にシークして、リードイン領域に記録されているディスクIDを読み出してHigh to LowメディアかLow to Highメディアを判別することができる。
【0056】
ディスクの判別結果を受けて、制御回路25は、光ディスク1がHigh to Lowメディアの場合はSEL信号にLowレベルを、光ディスク1がLow to Highメディアの場合はSEL信号にHighレベルを出力する。
【0057】
以上の動作によって生成されるdefect信号とmirr信号について、High to Lowメディアの場合とLow to Highメディアの場合に分けて説明する。
【0058】
まず、High to Lowメディアの場合について説明する。
【0059】
制御回路25は、SEL信号にLowレベルを出力しているので、選択回路22,23は共に入力a側に切り換っており、トップエンベロープ検出回路20が出力するRF信号のトップエンベロープ信号が選択回路22を介して第1の比較回路27に入力される。そのため、トップエンベロープ信号と第1の閾値電圧26が出力する電圧Vth1とが比較回路27によって比較されて、トップエンベロープ信号が電圧Vth1よりも小さい期間において比較回路27の出力はHighとなるので、比較回路27の出力波形は図1の波形(c)の左側に示した波形と同様のdefect信号になる。
【0060】
また、ボトムエンベロープ検出回路21が出力するRF信号のボトムエンベロープ信号が選択回路23およびACカップリング回路28を介して第2の比較回路30に入力されので、ボトムエンベロープ信号と第2の閾値電圧29が出力する電圧Vth2とが比較回路30によって比較されてmirr信号が生成される。なお、排他的論理回路30に入力されるSEL信号はLowレベルなので、mirr信号は極性反転されず図2の波形(d)の左側に示した波形と同様になる。
【0061】
以上のように、High to Lowメディアの場合におけるdefect信号およびmirr信号は、図1および図2に示した従来波形と同様となる。
【0062】
次に、Low to Highメディアの場合について説明する。 制御回路25は、SEL信号にHighレベルを出力しているので、選択回路22,23は共に入力b側に切り換っている。そのため、ボトムエンベロープ検出回路21が出力するRF信号のボトムエンベロープ信号が選択回路22を介して第1の比較回路27に入力される。この場合の各信号波形を図5に示す。
【0063】
図5(a)は、図1(a)の右側の波形と同じLow to HighメディアのRF信号波形であり、未記録部と記録部にそれぞれディフェクト部によるRF信号のレベル低下が存在する。
【0064】
図5(b)は、選択回路22を介して第1の比較回路27に入力されるRF信号(a)のボトムエンベロープである。
【0065】
図5(c)は、比較回路27が出力するdefect信号であり、ボトムエンベロープ信号(b)が電圧Vth1より小さい期間でHigh レベルとなる。これより、図1(c)の右側波形で示した従来技術のdefect信号に対して、図5(c)に示す本実施例のdefect信号は未記録部と記録部の両方のディフェクトを正しく検出できていることが分かる。
【0066】
また、トップエンベロープ検出回路20が出力するRF信号のトップトエンベロープ信号が選択回路23およびACカップリング回路28を介して第2の比較回路30に入力される。この場合の各信号波形を図6に示す。
【0067】
図6(a)は、記録膜の断面図であり、ランド・グルーブ構造を有している。なお、図1(a)と同様に記録マークはグループにのみ形成されるものとし、既にグルーブには情報が記録されているものとする。
図6(b)は、図2(b)右側と同様にLow to High メディアにおいてトラックを横断しているときのRF信号である。記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。
図6(c)は、ACカップリング回路28の出力であり、選択回路23を介して入力されるRF信号のトップエンベロープ信号である。
【0068】
図6(d)は、比較回路30の出力であり、トップエンベロープ信号(c)が電圧Vth2に設定されている0レベルより大きい期間にHighレベルとなる。
【0069】
図6(e)は、排他的論理和回路31の出力であり、SEL信号がHighレベルであるので比較回路30の出力(d)を極性反転したものである。RF信号(b)のレベルが低下している部分がミラー部となるランドであり、その期間において波形(e)はHighレベルとなっている。また、逆にRF信号のレベルが上がっている部分が記録部であるグルーブであり、その期間において波形(e)はLowレベルとなっている。よって、波形(e)からmirr部と記録トラックを判別可能であり、mirr信号として用いることができる。
【0070】
なお、図6の説明においてACカップリング回路28の出力波形(c)は0レベルが基準となるように出力しているが、任意のリファレンスレベルVrefを基準としてもよい。また、その場合は、第2の閾値電圧29の出力電圧Vth2は前記リファレンスレベルVrefに設定すれば、mirr信号は図6(e)と同様の波形になる。
【0071】
以上に説明した第1実施例の光ディスク装置は、装着された光ディスクの種類に応じて、defect信号およびmirr信号の生成対象信号をRF信号のトップエンベロープ信号またはボトムエンベロープ信号に切り換えるため、High to LowメディアとLow to Highメディアのどちらでもdefect信号とmirr信号を正しく生成することができる。
【実施例2】
【0072】
以下、本発明における第2の実施例について説明する。
【0073】
光ディスクにおいては、規格値の範囲内において反射率がディスク面内で変動することがある。そのためRF信号のボトムエンベロープ信号もディスク反射率の変動の影響を受けるので、mirr信号を正しく生成できないという問題が発生する。この問題を解決するために、ボトムエンベロープ信号のトップホールド信号とボトムホールド信号を生成し、それらの中間レベルをmirr信号生成のための閾値レベルとする技術が公知である。
【0074】
しかしながら、この方法をLow to Highメディアに適用しようとすると、図2(b)で説明したようにLow to Highメディアのボトムエンベロープは記録トラック/未記録トラックによる変調を受けていないため、正しくmirr信号を生成することができない。
【0075】
そこで、本実施例では、ディスク面内の反射率変動の影響を回避して、さらにHigh to Lowメディア及びLow to Highメディアの両方に対応してmirr信号を正確に生成可能な方法について説明する。
第2の実施例においては、第1の実施例に対してサーボ制御信号生成回路18のmirr信号生成部が異なっている。第2の実施例におけるサーボ制御信号生成回路18を図7に示す。以下、図7において第1の実施例と異なる部分について説明する。
【0076】
符号32は、トップホールド回路であり、ACカップリング回路32の出力のトップレベルをホールドしたトップホールド信号を出力する。入力信号レベルが現状のトップホール回路の出力信号レベルよりも大きければ、出力信号は入力信号に追従し、入力信号レベルが出力信号レベルよりも小さくなると所定の時定数をもって出力信号レベルは低下する。
【0077】
符号33は、ボトムホールド回路であり、ACカップリング回路32の出力のボトムレベルをホールドしたボトムホールド信号を出力する。入力信号レベルが現状のボトムホール回路の出力信号レベルよりも小さければ、出力信号は入力信号に追従し、入力信号レベルが出力信号レベルよりも大きくなると所定の時定数をもって出力信号レベルは上昇する。
【0078】
符号34は、可変抵抗であり、トップホールド回路32とボトムホールド回路33の出力を分圧して出力する。本実施例では、トップホールドレベルとボトムホールドレベルの中間レベルを出力するよう分圧比=1:1に設定されているものとする。
【0079】
第2実施例の比較回路30は、ACカップリング回路28の出力が可変抵抗34の出力よりも大きい場合にHighレベルを、小さい場合にLowレベルを出力する。
【0080】
以上の構成における動作波形を図8に示す。図8において、左側がHigh to Lowメディアの場合であり、右側がLow to Highメディアの場合である。
【0081】
図8(a)は、図2(a)同様に記録膜の断面図であり、ランド・グルーブ構造を有している。なお、記録マークはグルーブだけに形成されるものとし、既にグルーブには情報が記録されているものとする。
【0082】
図8(b)は、トラッキング制御オフ状態においてトラックを横断しているときのRF信号である。High to Lowメディア、Low to Highメディア共に、記録マークが形成されているグルーブにおいてRF信号振幅が大きくなり、記録マークが形成されていないランドにおいてRF信号振幅が小さくなる。さらに、ディスク面内の反射率変動の影響を受けて、トップエンベロープとボトムエンベロープが変動している。このことは記録トラック/未記録トラックの変調を受けないHigh to Low メディアのRF信号のトップエンベロープ、およびLow to Highメディアのボトムエンベロープが変動していることからも確認できる。
【0083】
図8(c)は、ACカップリング回路28の出力であり、High to Lowメディアの場合はRF信号のボトムエンベロープ信号が、Low to Highメディアの場合はRF信号のトップエンベロープ信号が選択回路23によって選択されて出力されている。さらに図8(c)中に、トップホールド回路32が出力するトップホールド信号とボトムホールド回路33が出力するボトムホールド信号を示す。また、同じく図8(c)中に可変抵抗34が主力する閾値電圧Vth2を示す。閾値電圧Vth2は図8(c)中のトップホールド信号レベルとボトムホールド信号レベルの中間レベルである。
【0084】
図8(d)は、第2の比較回路30の出力波形であり、図8(c)のACカップリング回路出力信号レベルが閾値電圧Vth2よりも大きい期間でHighとなる。
【0085】
図8(e)は、制御回路25が出力するSEL信号であり、High to Lowメディアの場合はLowレベル、Low to Highレベルの場合はHighレベルである。
【0086】
図8(f)は、排他的論理和回路31が出力するmirr信号であり、High to Lowメディアの場合は、第2の比較回路30の出力波形(d)と同じであり、Low to Highメディアの場合は第2の比較回路30の出力波形(d)を極性反転したものとなる。
【0087】
ここで、図8のmirr信号(f)と記録膜断面図(a)を比較すると、mirr信号(f)がHighの期間はランドと一致しており、Lowの期間はグルーブと一致している。また、図8(a)で説明したようにグルーブに情報が記録されているので、ランドは情報が記録されていないミラー部となる。これらより、図8に示したmirr信号(f)は光ディスクのミラー部であるランドと一致しているので正しくミラー部を検出できていることが分かる。
【0088】
以上に説明した第2実施例の光ディスク装置は、記録トラック/未記録トラックの変調を受けたRF信号のエンベロープ信号のトップホールド信号とボトムエンベロープ信号からmirr信号を生成する閾値レベルを求めるので、光ディスクの反射率がディスク面内で変動しても正しくmirr信号を生成できる。さらには、mirr信号を生成するエンベロープ信号を、光ディスクの種類に応じてボトムエンベロープとトップエンベロープを切り換えるので、High to LowメディアとLow to Highメディアの両方に対応してmirr信号を正しく生成することができる。
【0089】
なお、第2の実施例において、可変抵抗34の分圧比は1:1と説明したが、ミラー信号のデューティ比が所望の値となるように0.95:1.05というように調整してもよい。
【符号の説明】
【0090】
1…光ディスク、2…対物レンズ、3…光ピックアップ、4…RF信号生成回路、5…サーボエラー信号生成回路、6…フォーカス制御回路、7,9,11,16…ドライバ回路、8…トラッキング制御回路、10…スレッド制御回路、12…スレッドモータ、13…リードスクリュ、14…ウォブル信号検出回路、15…スピンドル制御回路、17…スピンドルモータ、18…サーボ制御信号生成回路、19…トラックカウンタ、20…トップエンベロープ検出回路、21…ボトムエンベロープ検出回路、22,23…選択回路、24…ディスク判別回路、25…制御回路、26…第1の閾値電圧、27…第1の比較回路、28…ACカップリング回路、29…第2の閾値電圧、30…第2の比較回路、31…排他的論理和回路、32…トップホールド回路、33…ボトムホールド回路、34…可変抵抗
【特許請求の範囲】
【請求項1】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、
前記ディスク判別手段により、記録前に対して記録後に反射率が低下する光ディスクか、記録前に対して記録後に反射率が上昇する光ディスクかを判別された光ディスクの種類にあわせて、トップエンベロープ信号とボトムエンベロープ信号から信号を選択し、ディフェクト信号、ミラー信号を生成することを特徴とするサーボ制御信号生成装置。
【請求項2】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、記録前に対して記録後に反射率が上昇するディスクと判別したときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成することを特徴とするサーボ制御信号生成装置。
【請求項3】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号を、上昇するディスクと判別したときはボトムエンベロープ信号を選択して出力する第1の選択手段と、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはボトムエンベロープ信号を、上昇するディスクと判別したときはトップエンベロープ信号を選択して出力する第2の選択手段と、
前記第1の選択手段の出力信号レベルが第1の所定レベルよりも小さい期間を検出する第1の検出手段と、
前記第2の選択手段の出力信号からDC成分を除去する低域除去手段と、
前記低域除去手段の出力信号レベルが第2の所定レベルよりも大きい期間を検出する第2の検出手段とを備えて、
前記第1の検出手段の出力信号をディフェクト信号とし、前記第2の検出手段の出力信号をミラー信号とすることを特徴とするサーボ制御信号生成装置。
【請求項4】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と、
前記トップエンベロープ信号とボトムエンベロープ信号を切り換えて出力する切り換え手段と、
前記切り換え手段の出力からDC成分を除去する低域除去手段と、
前記低域除去手段の出力のトップレベルをホールドするトップホールド手段と、
前記低域除去手段の出力のボトムレベルをホールドするボトムホールド手段と、
前記トップホールド手段の出力信号と前記ボトムホールド手段の出力信号を分圧した信号を出力する分圧手段と、
前記低域除去手段の出力と前記分圧手段の出力とを比較して比較結果である2値化信号をミラー信号として出力する比較手段とを備えて、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときは前記切り換え手段はボトムエンベロープ信号を出力し、記録前に対して記録後に反射率が上昇するディスクと判別したときは前記切り換え手段はトップエンベロープ信号を出力することを特徴とするサーボ制御信号生成装置。
【請求項5】
前記請求項4に記載のサーボ制御信号生成装置において、
前記分圧手段は、前記トップホールド手段と前記ボトムホールド手段の出力信号を1:1に分圧することを特徴とするサーボ制御信号生成装置。
【請求項6】
前記請求項1乃至5に記載のいずれか1つのサーボ制御信号生成装置において、前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときと記録後に反射率が上昇すると判別したときで、前記ミラー信号の極性を切り換えることを特徴とするサーボ制御信号生成装置。
【請求項7】
前記請求項1乃至6に記載のいずれか1つのサーボ制御信号生成装置において、
前記ディスク判別手段は、BCA領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別することを特徴とするサーボ制御信号生成装置。
【請求項8】
前記請求項1乃至6に記載のいずれか1つのサーボ制御信号生成装置において、
前記ディスク判別手段は、リードイン領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別することを特徴とするサーボ制御信号生成装置。
【請求項9】
前記請求項1乃至8のいずれかの1つのサーボ制御信号生成装置を備える光ディスク装置において、
前記ディフェクト信号がディフェクトを検出した期間においてサーボ制御をホールド動作とすることを特徴とする光ディスク装置。
【請求項10】
前記請求項1乃至8のいずれかの1つのサーボ制御信号生成装置を備える光ディスク装置において、
前記ミラー信号を用いて横断トラック数をカウントすることを特徴とする光ディスク装置。
【請求項1】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、
前記ディスク判別手段により、記録前に対して記録後に反射率が低下する光ディスクか、記録前に対して記録後に反射率が上昇する光ディスクかを判別された光ディスクの種類にあわせて、トップエンベロープ信号とボトムエンベロープ信号から信号を選択し、ディフェクト信号、ミラー信号を生成することを特徴とするサーボ制御信号生成装置。
【請求項2】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段とを備えて、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号からディフェクト信号をボトムエンベロープ信号からミラー信号を生成し、記録前に対して記録後に反射率が上昇するディスクと判別したときはボトムエンベロープ信号からディフェクト信号をトップエンベロープ信号からミラー信号を生成することを特徴とするサーボ制御信号生成装置。
【請求項3】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはトップエンベロープ信号を、上昇するディスクと判別したときはボトムエンベロープ信号を選択して出力する第1の選択手段と、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときはボトムエンベロープ信号を、上昇するディスクと判別したときはトップエンベロープ信号を選択して出力する第2の選択手段と、
前記第1の選択手段の出力信号レベルが第1の所定レベルよりも小さい期間を検出する第1の検出手段と、
前記第2の選択手段の出力信号からDC成分を除去する低域除去手段と、
前記低域除去手段の出力信号レベルが第2の所定レベルよりも大きい期間を検出する第2の検出手段とを備えて、
前記第1の検出手段の出力信号をディフェクト信号とし、前記第2の検出手段の出力信号をミラー信号とすることを特徴とするサーボ制御信号生成装置。
【請求項4】
記録前に対して記録後に反射率が低下する光ディスクと記録前に対して記録後に反射率が上昇する光ディスクの再生に対応するサーボ制御信号生成装置において、
光ディスクの反射光からRF信号を生成するRF生成手段と、
前記RF信号から光ディスクの種類を判別するディスク判別手段と、
前記RF信号のトップエンベロープ信号を生成するトップエンベロープ生成手段と、
前記RF信号のボトムエンベロープ信号を生成するボトムエンベロープ生成手段と、
前記トップエンベロープ信号とボトムエンベロープ信号を切り換えて出力する切り換え手段と、
前記切り換え手段の出力からDC成分を除去する低域除去手段と、
前記低域除去手段の出力のトップレベルをホールドするトップホールド手段と、
前記低域除去手段の出力のボトムレベルをホールドするボトムホールド手段と、
前記トップホールド手段の出力信号と前記ボトムホールド手段の出力信号を分圧した信号を出力する分圧手段と、
前記低域除去手段の出力と前記分圧手段の出力とを比較して比較結果である2値化信号をミラー信号として出力する比較手段とを備えて、
前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときは前記切り換え手段はボトムエンベロープ信号を出力し、記録前に対して記録後に反射率が上昇するディスクと判別したときは前記切り換え手段はトップエンベロープ信号を出力することを特徴とするサーボ制御信号生成装置。
【請求項5】
前記請求項4に記載のサーボ制御信号生成装置において、
前記分圧手段は、前記トップホールド手段と前記ボトムホールド手段の出力信号を1:1に分圧することを特徴とするサーボ制御信号生成装置。
【請求項6】
前記請求項1乃至5に記載のいずれか1つのサーボ制御信号生成装置において、前記ディスク判別手段が光ディスクの種類を記録前に対して記録後に反射率が低下するディスクと判別したときと記録後に反射率が上昇すると判別したときで、前記ミラー信号の極性を切り換えることを特徴とするサーボ制御信号生成装置。
【請求項7】
前記請求項1乃至6に記載のいずれか1つのサーボ制御信号生成装置において、
前記ディスク判別手段は、BCA領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別することを特徴とするサーボ制御信号生成装置。
【請求項8】
前記請求項1乃至6に記載のいずれか1つのサーボ制御信号生成装置において、
前記ディスク判別手段は、リードイン領域に記録されているディスクIDから、光ディスクの反射率が記録前に対して記録後に低下するか上昇するかを判別することを特徴とするサーボ制御信号生成装置。
【請求項9】
前記請求項1乃至8のいずれかの1つのサーボ制御信号生成装置を備える光ディスク装置において、
前記ディフェクト信号がディフェクトを検出した期間においてサーボ制御をホールド動作とすることを特徴とする光ディスク装置。
【請求項10】
前記請求項1乃至8のいずれかの1つのサーボ制御信号生成装置を備える光ディスク装置において、
前記ミラー信号を用いて横断トラック数をカウントすることを特徴とする光ディスク装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−192105(P2010−192105A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2010−95606(P2010−95606)
【出願日】平成22年4月19日(2010.4.19)
【分割の表示】特願2005−305164(P2005−305164)の分割
【原出願日】平成17年10月20日(2005.10.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成22年4月19日(2010.4.19)
【分割の表示】特願2005−305164(P2005−305164)の分割
【原出願日】平成17年10月20日(2005.10.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
[ Back to top ]