
サーボ装置及び該装置を備えた遠隔操作装置
【課題】サーボ装置の応答特性の設定を送信機から容易に行うこと。
【解決手段】送信機10からの制御信号を受信し、この制御信号を予め記憶部35に記憶された特性データに応じて、モータ制御部34で駆動信号に変換して駆動機構32を駆動制御する制御部31を備えたサーボ装置30において、制御部31は、制御信号が操縦信号か特性データ信号かを判別する信号処理部33と、制御信号が特性データ信号であると判断したときは、受信した特性データ信号に基づき特性データが更新記憶される記憶部35とを備えた。
【解決手段】送信機10からの制御信号を受信し、この制御信号を予め記憶部35に記憶された特性データに応じて、モータ制御部34で駆動信号に変換して駆動機構32を駆動制御する制御部31を備えたサーボ装置30において、制御部31は、制御信号が操縦信号か特性データ信号かを判別する信号処理部33と、制御信号が特性データ信号であると判断したときは、受信した特性データ信号に基づき特性データが更新記憶される記憶部35とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばヘリコプター、飛行機、自動車、船舶等の各種模型又は無人操作される産業用機械等の無線により遠隔操作される被操作体に搭載されるサーボ装置及び該装置を備えた遠隔操作装置に関するものである。
【背景技術】
【0002】
サーボ装置は、入力信号に応じて操作部位を正確に駆動するものであり、電波等による無線通信により被操作体(各種模型や産業機械を含む)を遠隔操縦する遠隔操作装置においては、被操作体に搭載される。そして、送信機側による操作量に応じて被操作体の各操作部位(例えば、模型飛行機等であれば、ラダー、エレベータ、エンジンスロットル、エルロン等)が正確に駆動されるような駆動機構として用いられている。
【0003】
ところで、遠隔操作装置を所有するユーザは、使用環境(天候や路面状態)への対応や所望の操作感を得るため、下記(1)、(2)の方法によって送信機の操作量に対する制御信号の応答特性を変更している。
(1)下記特許文献1又は2に開示されるような被操作体の操作を行う送信機の空きチャンネルを利用して、被操作体に搭載されるモータのモータコントローラーを流れる最大電流値等の特性変更を行う方法。
(2)特性設定用のソフトウェアをPC(Personal Computer )等の外部機器にダウンロードし、PCからの操作に基づき、所望の電流値を設定して特性変更を行う方法。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−312065号公報
【特許文献2】特開平10−295950号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記(1)による設定方法では、送信機に空きチャンネルがあることを前提とした方法であるため、ユーザが所有する送信機に空きチャンネルがない場合には、応答特性を変更できず、この方法により設定できるユーザが限られてしまうという問題があった。
【0006】
また、上記(2)による設定方法では、外部機器であるPCとサーボ装置とを有線接続し、PC画面上で設定したパラメータをサーボ装置に反映させているため、設定する度にPCとサーボ装置との接続が必要となり、被操作体を使用する場所にPCを持ち運ばなければならず、気軽に設定変更を行うことができないという問題があった。さらに、PC操作に不慣れなユーザは、この方法による設定ができない虞があった。
【0007】
さらに、ラジコン操作におけるハンドルの応答性は、使用環境によって変化し、また操作感覚は個々のユーザによって様々であるため、例えば競技中に天候が悪化したことで応答特性を急遽変更しなければならないような場合、設定変更することが困難であった。
【0008】
そこで、本発明は上記問題点に鑑みてなされたものであって、サーボ装置の各種設定を容易にしてユーザビリティ向上を図ることのできるサーボ装置及び該装置を備えた遠隔操作装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明の請求項1に記載されたサーボ装置は、送信機からの制御信号を受信し、この制御信号を予め記憶部に記憶された特性データに応じた駆動信号に変換して駆動機構を駆動制御する制御部を備えたサーボ装置において、
前記制御部は、前記送信機からの制御信号が前記駆動機構を駆動制御するための操縦信号或いは前記特性データの応答特性を変更するための特性データ信号であるかを判別する信号処理部を備え、
前記記憶部は、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき前記特性データが更新記憶されることを特徴とする。
【0010】
請求項2記載のサーボ装置は、請求項1記載のサーボ装置において、前記特性データ信号は、応答特性を設定した情報を含むシリアルデータであり、前記操縦信号は、PWM信号であることを特徴とする。
【0011】
請求項3に記載されたサーボ装置は、請求項1又は2記載のサーボ装置において、前記信号処理部は、前記制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値を信号判別用情報として保持し、
前記送信機からの制御信号と、前記信号判別用情報とを比較して、前記制御信号が前記操縦信号或いは前記特性データ信号であるかの判別を行うことを特徴とする。
【0012】
請求項4記載のサーボ装置は、請求項3記載のサーボ装置において、前記記憶部は、前記操縦信号を記憶する操縦信号記憶手段と、複数ある前記特性データを個々に記憶する記憶領域が前記特性データの数に応じて分割され、前記特性データを該当する記憶領域に記憶させるための記憶アドレスが前記記憶領域毎に設定された特性データ記憶手段とを備え、
さらに、前記信号処理部は、前記操縦信号を前記操縦信号記憶手段に記憶するための記憶アドレスと、前記特性データを前記特性データ記憶手段の該当する記憶領域に記憶させるための記憶アドレスを生成する記憶アドレス生成手段を備え、
前記信号処理部は、入力した前記制御信号のパルス幅と前記信号判別用閾値とを比較し、前記制御信号が前記操縦信号であれば、前記記憶アドレス生成部で生成された前記記憶アドレスに従って前記操縦信号を前記操縦信号記憶手段に記憶させ、前記制御信号が前記特性データ信号であれば、前記記憶アドレスに従って前記特性データ信号を前記特性データ記憶手段の該当する記憶領域に記憶させることを特徴とする。
【0013】
請求項5記載の遠隔操作装置は、被操作体の可動部位毎に対応する各チャンネルに対応した操作部の操作量に応じた操縦信号又は応答特性である特性データを変更するための特性データ信号の何れかを制御信号として送信する送信機と、
前記送信機からの前記制御信号を受信する受信機と、
前記受信機を介して受信した前記制御信号が前記操縦信号であるか前記特性データ信号であるかを判別し、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき記憶部に記憶される前記特性データを更新記憶するサーボ装置と、
を備えたことを特徴とする。
【発明の効果】
【0014】
本発明のサーボ装置によれば、送信機の空きチャンネルを利用する必要もなく、またPC等の外部装置を用いることなく、送信機で生成した制御信号を受信機を介してサーボ装置に出力するだけで応答特性である特性データの設定を容易に行うことができる。
【0015】
また、入力する制御信号のパルス幅で操縦信号か特性データ信号かを判別し、信号の種類に応じて被操作体の操縦又は特性データの更新記憶が1台の送信機で行うことができるため、簡便に応答特性の設定を変更することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る遠隔操作装置の概略構成を示す機能ブロック図である。
【図2】同装置における信号処理部及び記憶部の詳細を示す機能ブロック図である。
【図3】同装置におけるパルス幅比較部の詳細を示す機能ブロック図である。
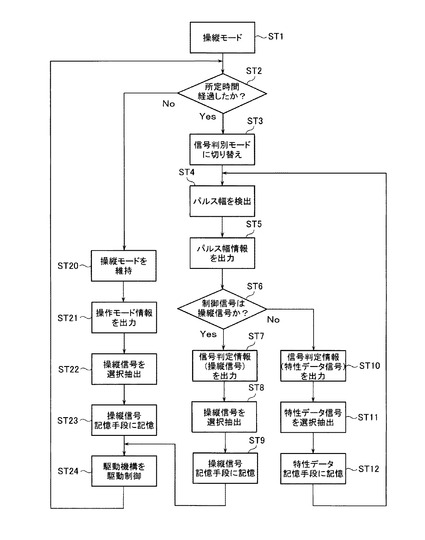
【図4】同装置における一連の処理動作を示すフローチャート図である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付した図面を参照しながら詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではなく、この形態に基づいて当業者等によりなされる実施可能な他の形態、実施例及び運用技術等はすべて本発明の範疇に含まれる。
【0018】
[装置構成]
まず、図1〜3を参照しながら、本発明に係るサーボ装置を備える遠隔操作装置の構成要件について説明する。
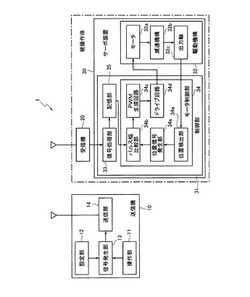
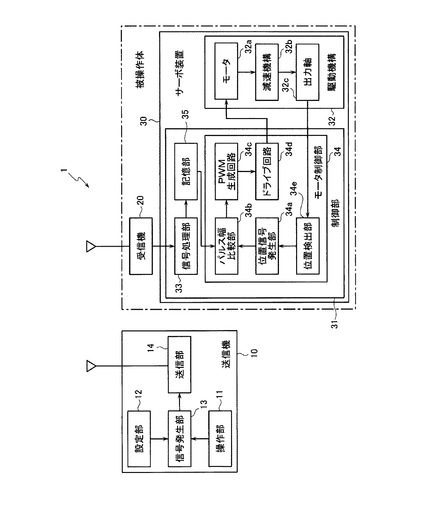
図1に示すように、本例の遠隔操作装置1は、遠隔操作対象である被操作体(例えば、ヘリコプター、飛行機、車、船舶、ロボット等の各種模型又は産業機械)に対して送信する各種制御信号(操縦信号又は特性データ信号)を生成する送信機10と、被操作体に搭載され、受信機20を介して受信した制御信号に基づき可動部位の動作量を制御するサーボ装置30とを備えて概略構成されている。
【0019】
なお、受信機20には、サーボ装置30が複数接続されていてもよい。また、サーボ装置30以外にもジャイロ装置やモータコントローラー等の機器を任意に接続した構成でもよい。
【0020】
<送信機>
送信機10は、被操縦体に搭載されるサーボ装置30を操作するための制御信号を生成して送信する装置であり、操作部11と、設定部12と、信号発生部13と、送信部14とを備えて構成される。
【0021】
操作部11は、スティックレバー等の各種レバーやスイッチ類で構成され、各種レバーによる上下左右の操作、スイッチ類の押下操作に基づく操作量に応じたアナログ信号を、各チャンネルに対する操作信号として信号発生部13に出力する。
【0022】
設定部12は、例えば液晶ディスプレイ等の表示装置の表示画面上に設けられたタッチパネルやエディットキー等の各種操作キーで構成され、各種設定やその設定変更を行う際に操作される。具体的には、表示装置の表示画面にサーボ装置30の特性設定画面を表示させ、これを参照しながらユーザが操作キー又はタッチパネルを所定操作することで、操作時の操作量に対する応答特性の設定が行われる。そして、設定された内容に基づくディジタル信号を設定操作信号として信号発生部13に出力している。
【0023】
信号発生部13は、操作部11からの操作信号又は設定部12からの設定操作信号を入力すると、送信部14を介してサーボ装置30に対して出力する制御信号(操縦信号又は特性データ信号)を生成する周知の信号生成回路で構成されている。具体的には、信号発生部13は、操作部11からの操作信号をA/D変換し、時分割的に所定の周期(例えば1フレーム14〜20mSの周期で、各チャンネルのパルス幅が1520μS±600μS)で送出するような信号処理を行い、この処理により生成された制御信号を操縦信号(PWM信号)として送信部14に出力している。また、信号発生部13は、設定部12からの設定操作信号を含むシリアルデータとなるような信号処理を行い、この処理により生成された制御信号を特性データ信号として送信部14に出力している。
【0024】
送信部14は、信号発生部13からの制御信号(操縦信号又は特性データ信号)を高周波変調(例えば、AM変調やFM変調)や、スペクトル拡散等で変調した後、アンテナから電波として受信機20を介してサーボ装置30に送信している。
【0025】
<受信機>
受信機20は、アンテナから電波として受信した送信機10からの受信電波を増幅し、制御信号に復調してサーボ装置30に出力する周知の受信装置である。
【0026】
<サーボ装置>
サーボ装置30は、受信機20を介して受信した制御信号に基づき、被操作体における可動部位(例えば、被操作体が模型飛行機であれば、ラダー、エルロン、エレベータ、エンジンスロットル等に相当)をそれぞれ独立して駆動制御するための装置であり、制御部31と、駆動機構32とを備えて構成される。
【0027】
(制御部)
制御部31は、送信機10からの操縦信号に基づき駆動機構32を駆動制御する制御用LSI(Large Scale Integration )であり、信号処理部33と、モータ制御部34と、記憶部35とを備えて各部の駆動制御を行っている。
【0028】
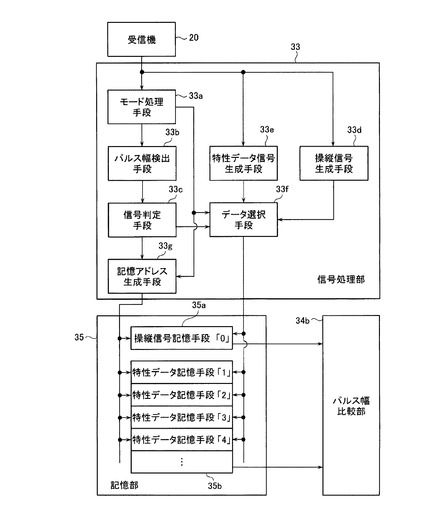
信号処理部33は、モード処理手段33aと、パルス幅検出手段33bと、信号判定手段33cと、操縦信号生成手段33dと、特性データ信号生成手段33eと、データ選択手段33fと、記憶アドレス生成手段33gとを備えて構成され、受信機20で受信した制御信号の入力経過時間の判定結果や信号のパルス幅の判定結果に基づき、制御信号から生成した操縦信号又は特性データ信号の生成や、記憶部35に対する書き込み処理等を行う。
【0029】
モード処理手段33aは、受信機20で前回受信した制御信号から次回入力するまでの経過時間に基づき、通常の操縦を行う操縦モード又は信号の種類を判別する信号判別モードに切り替え、切り替えたモード状態に応じたモード情報(操縦モード情報又は信号判定モード情報)をパルス幅検出手段33bと、データ選択手段33fに出力している。
【0030】
パルス幅検出手段33bは、モード処理手段33aからの信号判定モード情報に基づき、受信機20を介して入力した制御信号のパルス幅を検出し、その検出結果をパルス幅情報として信号判定手段33cに出力している。
【0031】
信号判定手段33cは、パルス幅検出手段33bからのパルス幅情報と予め設定された信号判定用情報(例えば、入力した制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値)とに基づき、入力した制御信号の種類を特定し、その判定結果を信号判定情報として、データ選択手段33fと記憶アドレス生成手段33gに出力している。
【0032】
操縦信号生成手段33dは、入力した制御信号が操縦信号であると仮定して制御信号から操縦信号を生成して一時的に保持している。なお、データ選択手段33fからのリセット信号に基づきリセットされる。
【0033】
特性データ信号生成手段33eは、入力した制御信号が特性データ信号であると仮定して制御信号から特性データ信号を生成して一時的に保持している。なお、データ選択手段33fからのリセット信号に基づきリセットされる。
【0034】
データ選択手段33fは、信号判定手段33cからの信号判定情報に基づき、操縦信号生成手段33d又は特性データ信号生成手段33eから、生成された操縦信号又は特性データ信号を選択抽出して、記憶部35に書き込みを行っている。また、データ選択手段33eは、モード処理手段33aからの操縦モード情報を入力すると、操縦信号生成手段33dから操縦信号を選択抽出して記憶部35に書き込みを行っている。
なお、データ選択手段33fは、操縦信号又は特性データ信号の何れかの信号を抽出した際に、現在保持されている各信号のリセットを行うリセット信号を操縦信号生成手段33d及び特性データ信号生成手段33eに出力している。
【0035】
記憶アドレス生成手段33gは、信号判定手段33cからの信号判定情報に基づき生成された操縦信号又は特性データ信号を記憶させる記憶領域のアドレス指定(すなわち、記憶部35における操縦信号記憶手段35a又は特性データ記憶手段35bにおける各特性データに対応した記憶領域毎のアドレス指定)を行い、この指定した記憶アドレスを記憶部35に出力している。
【0036】
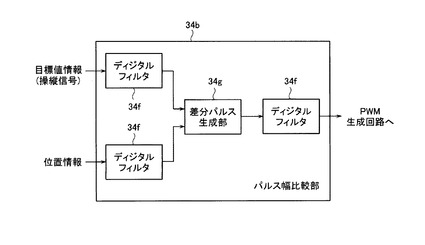
モータ制御部34は、位置検出部34eからの位置情報(駆動機構32の出力軸32cの回転位置を示す情報)に応じたパルス信号である位置信号を生成して出力する位置信号発生部34aと、位置信号のパルス幅と記憶部35に記憶された操縦信号のパルス幅とを比較してその差分となる差分パルス信号を生成して出力するパルス幅比較部34bと、比較出力である差分パルス信号を記憶部35に記憶される特性データに応じた駆動信号となるよう信号生成して出力するPWM生成回路34cと、この駆動信号に応じた正又は逆方向の電流を流して駆動機構32の回転方向を駆動制御するドライブ回路34dとを備えている。
【0037】
パルス幅比較部34bの比較処理としては、図3に示すように、目標値情報となる送信機10からの操縦信号と、位置検出部34eからの位置情報とをそれぞれディジタルフィルタ34fを通過させ、差分パルス生成部34gにて目標値情報と位置情報との足し合せにより差分パルス信号を生成している。このディジタルフィルタ34fとは、送信機からの操縦信号をそのまま反映すると急激なモータ駆動が起こる虞があるため、スムーズで、且つ滑らかな駆動となるように操縦信号、位置情報及び差分パルス信号に対し、特性データ信号に応じた補正を行うためのフィルタとして機能する。また、モータ32aの速度情報を検出する速度検出手段を駆動機構32に具備させ、操縦信号と位置情報に加え、速度情報を用いて差分パルス信号を生成することもできる。
【0038】
なお、モータ制御部34を1つのLSIとしてワンチップに実装したカスタムICの例であるが、当然、各部をそれぞれ独立した個々の回路として構成してもよい。
【0039】
記憶部35は、EEPROM(登録商標)等の書き換え可能な不揮発性メモリで構成され、操縦信号を記憶する操縦信号記憶手段35aと、特性データ信号を特性データとして記憶する特性データ記憶手段35bとを備え、データ選択手段33fからの操縦信号又は特性データ信号をそれぞれ更新記憶している。
【0040】
操縦信号記憶手段35aは、データ選択手段33fからの操縦信号を記憶する記憶領域であり、操縦信号が記憶されるように予め記憶アドレス(例えばアドレス「0」)が設定されている。
【0041】
特性データ記憶手段35bは、複数ある特性データを個別に記憶するように、特性データの数に基づいて記憶領域が分割されており、さらに各特性データに対応した記憶アドレス(例えば、図2におけるアドレス「1」〜「4」)が記憶領域毎に予め設定されている。従って、データ選択手段33fからの特性データ信号は、記憶アドレス生成手段33gによって生成された記憶アドレスに対応する記憶領域に記憶されることになる。
【0042】
なお、特性データの種類としては、例えば、サーボリバース(サーボの回転する方向の変更)、ニュートラル調整(出力軸の基準位置であるニュートラル位置の変更)、スピードコントロール(動作スピードの設定)、デッドバンド(不感帯の角度指定)、舵角調整(ニュートラル位置を中心とした左右の最大舵角の調整)、ブースト(サーボ駆動時にかける最小電流の設定)、ダンパ(ハンチングの抑制に係る設定)、ストレッチャ(目標位置へ戻ろうとするトルクと誤差の比例係数の指定)等がある。
【0043】
(駆動機構)
駆動機構32は、ドライバ回路34dから供給される駆動信号に基づく電流量によりモータ32aが駆動し、減速機構32bを介して接続される出力軸32cの回転によって可動部位を可動する動力伝達機構である。また、出力軸32cの回転位置は位置検出部34e(例えば、ポテンショメータ、ロータリーエンコーダ、レゾルバ等の出力軸32cの位置検出(回転角度)が可能な機器であればよい)によって検出され、その位置情報が位置信号発生部34aに出力される。
【0044】
[処理動作]
次に、本例の遠隔操作装置1におけるサーボ装置30の一連の処理動作について、図4を参照しながら説明する。
【0045】
図4に示すように、まず、電源がONされた後、サーボ装置30は受信機20を介して送信機10から操縦信号としての制御信号を受信する状態(操縦モード)となっている(ST1)。そして、モード処理手段33aで、送信機10から受信した制御信号の最後の受信タイミングから所定時間経過したか否かの判別を行う(ST2)。
【0046】
なお、図示しないが、ST2の処理と平行して、操縦信号生成手段33dは、入力した制御信号が操縦信号であると仮定して制御信号から操縦信号を生成して一時的に保持するとともに、特性データ信号生成手段33eでは、入力した制御信号が特性データ信号であると仮定して制御信号から特性データ信号を生成して一時的に保持される。
【0047】
ST2において、制御信号の最後の受信タイミングから所定時間経過したと判別すると(ST2−Yes)、モード状態として操縦モードから信号判別モードに切り替え(ST3)、パルス幅検出手段33bにおいてモード処理手段33aからの信号判定モード情報に基づき、受信機20を介して入力した制御信号のパルス幅を検出する(ST4)。次に、検出結果をパルス幅情報として信号判定手段33cに出力し(ST5)、信号判定手段33cにおいて、パルス幅検出手段33bからのパルス幅情報と予め設定された信号判定用情報とに基づき、入力した制御信号の種類を特定する(ST6)
【0048】
ST6において、入力した制御信号が操縦信号であった場合は(ST6−Yes)、その判定結果として制御信号が操縦信号であったことを示す信号判定情報を、データ選択手段33fと記憶アドレス生成手段33gに出力する(ST7)。そして、データ選択手段33fにおいて、信号判定手段33cからの信号判定情報に基づき、操縦信号生成手段33dから生成された操縦信号を選択抽出し(ST8)、記憶アドレス生成手段33gで生成された操縦信号に対応する記憶アドレスに従って、操縦信号記憶手段35aに記憶させる(ST9)。
なお、ST9の処理は、後述するST23の処理と同様であるため、操縦信号の記憶処理の後はST24へと進み、操縦信号に基づき駆動機構32の駆動制御を行う。
【0049】
一方、入力した制御信号が操縦信号でない場合は(ST6−No)、その判定結果として制御信号が特性データ信号であったことを示す信号判定情報を、データ選択手段33fと記憶アドレス生成手段33gに出力し(ST10)、データ選択手段33fにおいて、信号判定手段33cからの信号判定情報に基づき、特性データ信号生成手段33eから生成された特性データ信号を選択抽出する(ST11)。そして、記憶アドレス生成手段33gで生成された各特性データ信号に対応した記憶アドレスに従って、特性データ記憶手段35b内の各記憶領域に記憶させ(ST12)、再度ST4へ戻る。
【0050】
ST2において、制御信号の最後の受信タイミングから所定時間経過していないと判別すると(ST2−No)、モード状態を操縦モードとして維持し(ST20)、現在のモード状態を示す操縦モード情報をデータ選択手段33fと記憶アドレス生成手段33gに出力する(ST21)。次に、データ選択手段33fにおいて、入力した操縦モード情報に基づき、操縦信号生成手段33dから操縦信号を選択抽出し(ST22)、記憶アドレス生成手段33gで生成された操縦信号に対応した記憶アドレスに応じて操縦信号記憶手段35aに操縦信号を記憶させ(ST23)。そして、モータ制御部34は、操縦信号記憶手段35aに記憶された操縦信号と、モータ32aの出力軸32cの位置情報から差分パルス信号を生成し、特性データに応じた駆動信号によって駆動機構32を駆動制御し(ST24)、再度ST2へと戻る。
【0051】
以上説明したように、上述したサーボ装置30は、受信機20を介して送信機10から制御信号を受信し、所定時間制御信号を受信しなかった場合は操縦モードから信号判別モードへとモード切替を行う。そして、次に受信した制御信号と信号判別用情報とを比較して信号の種類を判別し、受信した信号が特性データ信号であると判別すると、この信号を記憶部35に出力して特性データを書き換えて更新を行う。
【0052】
これにより、送信機10の空きチャンネルを利用する必要がなく、またPC等の外部装置を用いることなく、送信機10で生成した制御信号を受信機20を介してサーボ装置30に出力するだけで通常の被操作体の操作に加えて応答特性である特性データの設定を容易に行うことができるため、ユーザビリティの向上を図ることができる。
【0053】
ところで、上述した形態では、サーボ装置30の設定用としての設定部12、サーボ装置30の操作用としての操作部11として別構成で説明したが、例えば特性設定の際に設定部12における表示画面を見ながら操作部11による操作で設定内容を変更するように操作部11を設定部12の設定操作手段として利用する構成とすることもできる。
【0054】
また、送信機10から送信される特性データ信号として、サーボ装置30等の機器毎に1つのシリアルデータとして送信する構成で説明したが、特性データ信号を複数の機器に対する連続した1つのシリアルデータとして送信することもできる。
【符号の説明】
【0055】
1…遠隔操作装置
10…送信機
11…操作部
12…設定部
13…信号発生部
14…送信部
20…受信機
30…サーボ装置
31…制御部
32…駆動機構(32a…モータ、32b…減速機構、32c…出力軸)
33…信号処理部(33a…モード処理手段33a、33b…パルス幅検出手段、33c…信号判定手段、33d…操縦信号生成手段、33e…特性データ信号生成手段、33f…データ選択手段、33g…記憶アドレス生成手段)
34…モータ制御部(34a…位置信号発生部、34b…パルス幅比較部、34c…PWM生成回路、34d…ドライブ回路、34e…位置検出部、34f…ディジタルフィルタ、34g…差分パルス生成部)
35…記憶部(35a…操縦信号記憶手段、35b…特性データ記憶手段)
【技術分野】
【0001】
本発明は、例えばヘリコプター、飛行機、自動車、船舶等の各種模型又は無人操作される産業用機械等の無線により遠隔操作される被操作体に搭載されるサーボ装置及び該装置を備えた遠隔操作装置に関するものである。
【背景技術】
【0002】
サーボ装置は、入力信号に応じて操作部位を正確に駆動するものであり、電波等による無線通信により被操作体(各種模型や産業機械を含む)を遠隔操縦する遠隔操作装置においては、被操作体に搭載される。そして、送信機側による操作量に応じて被操作体の各操作部位(例えば、模型飛行機等であれば、ラダー、エレベータ、エンジンスロットル、エルロン等)が正確に駆動されるような駆動機構として用いられている。
【0003】
ところで、遠隔操作装置を所有するユーザは、使用環境(天候や路面状態)への対応や所望の操作感を得るため、下記(1)、(2)の方法によって送信機の操作量に対する制御信号の応答特性を変更している。
(1)下記特許文献1又は2に開示されるような被操作体の操作を行う送信機の空きチャンネルを利用して、被操作体に搭載されるモータのモータコントローラーを流れる最大電流値等の特性変更を行う方法。
(2)特性設定用のソフトウェアをPC(Personal Computer )等の外部機器にダウンロードし、PCからの操作に基づき、所望の電流値を設定して特性変更を行う方法。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−312065号公報
【特許文献2】特開平10−295950号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記(1)による設定方法では、送信機に空きチャンネルがあることを前提とした方法であるため、ユーザが所有する送信機に空きチャンネルがない場合には、応答特性を変更できず、この方法により設定できるユーザが限られてしまうという問題があった。
【0006】
また、上記(2)による設定方法では、外部機器であるPCとサーボ装置とを有線接続し、PC画面上で設定したパラメータをサーボ装置に反映させているため、設定する度にPCとサーボ装置との接続が必要となり、被操作体を使用する場所にPCを持ち運ばなければならず、気軽に設定変更を行うことができないという問題があった。さらに、PC操作に不慣れなユーザは、この方法による設定ができない虞があった。
【0007】
さらに、ラジコン操作におけるハンドルの応答性は、使用環境によって変化し、また操作感覚は個々のユーザによって様々であるため、例えば競技中に天候が悪化したことで応答特性を急遽変更しなければならないような場合、設定変更することが困難であった。
【0008】
そこで、本発明は上記問題点に鑑みてなされたものであって、サーボ装置の各種設定を容易にしてユーザビリティ向上を図ることのできるサーボ装置及び該装置を備えた遠隔操作装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明の請求項1に記載されたサーボ装置は、送信機からの制御信号を受信し、この制御信号を予め記憶部に記憶された特性データに応じた駆動信号に変換して駆動機構を駆動制御する制御部を備えたサーボ装置において、
前記制御部は、前記送信機からの制御信号が前記駆動機構を駆動制御するための操縦信号或いは前記特性データの応答特性を変更するための特性データ信号であるかを判別する信号処理部を備え、
前記記憶部は、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき前記特性データが更新記憶されることを特徴とする。
【0010】
請求項2記載のサーボ装置は、請求項1記載のサーボ装置において、前記特性データ信号は、応答特性を設定した情報を含むシリアルデータであり、前記操縦信号は、PWM信号であることを特徴とする。
【0011】
請求項3に記載されたサーボ装置は、請求項1又は2記載のサーボ装置において、前記信号処理部は、前記制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値を信号判別用情報として保持し、
前記送信機からの制御信号と、前記信号判別用情報とを比較して、前記制御信号が前記操縦信号或いは前記特性データ信号であるかの判別を行うことを特徴とする。
【0012】
請求項4記載のサーボ装置は、請求項3記載のサーボ装置において、前記記憶部は、前記操縦信号を記憶する操縦信号記憶手段と、複数ある前記特性データを個々に記憶する記憶領域が前記特性データの数に応じて分割され、前記特性データを該当する記憶領域に記憶させるための記憶アドレスが前記記憶領域毎に設定された特性データ記憶手段とを備え、
さらに、前記信号処理部は、前記操縦信号を前記操縦信号記憶手段に記憶するための記憶アドレスと、前記特性データを前記特性データ記憶手段の該当する記憶領域に記憶させるための記憶アドレスを生成する記憶アドレス生成手段を備え、
前記信号処理部は、入力した前記制御信号のパルス幅と前記信号判別用閾値とを比較し、前記制御信号が前記操縦信号であれば、前記記憶アドレス生成部で生成された前記記憶アドレスに従って前記操縦信号を前記操縦信号記憶手段に記憶させ、前記制御信号が前記特性データ信号であれば、前記記憶アドレスに従って前記特性データ信号を前記特性データ記憶手段の該当する記憶領域に記憶させることを特徴とする。
【0013】
請求項5記載の遠隔操作装置は、被操作体の可動部位毎に対応する各チャンネルに対応した操作部の操作量に応じた操縦信号又は応答特性である特性データを変更するための特性データ信号の何れかを制御信号として送信する送信機と、
前記送信機からの前記制御信号を受信する受信機と、
前記受信機を介して受信した前記制御信号が前記操縦信号であるか前記特性データ信号であるかを判別し、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき記憶部に記憶される前記特性データを更新記憶するサーボ装置と、
を備えたことを特徴とする。
【発明の効果】
【0014】
本発明のサーボ装置によれば、送信機の空きチャンネルを利用する必要もなく、またPC等の外部装置を用いることなく、送信機で生成した制御信号を受信機を介してサーボ装置に出力するだけで応答特性である特性データの設定を容易に行うことができる。
【0015】
また、入力する制御信号のパルス幅で操縦信号か特性データ信号かを判別し、信号の種類に応じて被操作体の操縦又は特性データの更新記憶が1台の送信機で行うことができるため、簡便に応答特性の設定を変更することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る遠隔操作装置の概略構成を示す機能ブロック図である。
【図2】同装置における信号処理部及び記憶部の詳細を示す機能ブロック図である。
【図3】同装置におけるパルス幅比較部の詳細を示す機能ブロック図である。
【図4】同装置における一連の処理動作を示すフローチャート図である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付した図面を参照しながら詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではなく、この形態に基づいて当業者等によりなされる実施可能な他の形態、実施例及び運用技術等はすべて本発明の範疇に含まれる。
【0018】
[装置構成]
まず、図1〜3を参照しながら、本発明に係るサーボ装置を備える遠隔操作装置の構成要件について説明する。
図1に示すように、本例の遠隔操作装置1は、遠隔操作対象である被操作体(例えば、ヘリコプター、飛行機、車、船舶、ロボット等の各種模型又は産業機械)に対して送信する各種制御信号(操縦信号又は特性データ信号)を生成する送信機10と、被操作体に搭載され、受信機20を介して受信した制御信号に基づき可動部位の動作量を制御するサーボ装置30とを備えて概略構成されている。
【0019】
なお、受信機20には、サーボ装置30が複数接続されていてもよい。また、サーボ装置30以外にもジャイロ装置やモータコントローラー等の機器を任意に接続した構成でもよい。
【0020】
<送信機>
送信機10は、被操縦体に搭載されるサーボ装置30を操作するための制御信号を生成して送信する装置であり、操作部11と、設定部12と、信号発生部13と、送信部14とを備えて構成される。
【0021】
操作部11は、スティックレバー等の各種レバーやスイッチ類で構成され、各種レバーによる上下左右の操作、スイッチ類の押下操作に基づく操作量に応じたアナログ信号を、各チャンネルに対する操作信号として信号発生部13に出力する。
【0022】
設定部12は、例えば液晶ディスプレイ等の表示装置の表示画面上に設けられたタッチパネルやエディットキー等の各種操作キーで構成され、各種設定やその設定変更を行う際に操作される。具体的には、表示装置の表示画面にサーボ装置30の特性設定画面を表示させ、これを参照しながらユーザが操作キー又はタッチパネルを所定操作することで、操作時の操作量に対する応答特性の設定が行われる。そして、設定された内容に基づくディジタル信号を設定操作信号として信号発生部13に出力している。
【0023】
信号発生部13は、操作部11からの操作信号又は設定部12からの設定操作信号を入力すると、送信部14を介してサーボ装置30に対して出力する制御信号(操縦信号又は特性データ信号)を生成する周知の信号生成回路で構成されている。具体的には、信号発生部13は、操作部11からの操作信号をA/D変換し、時分割的に所定の周期(例えば1フレーム14〜20mSの周期で、各チャンネルのパルス幅が1520μS±600μS)で送出するような信号処理を行い、この処理により生成された制御信号を操縦信号(PWM信号)として送信部14に出力している。また、信号発生部13は、設定部12からの設定操作信号を含むシリアルデータとなるような信号処理を行い、この処理により生成された制御信号を特性データ信号として送信部14に出力している。
【0024】
送信部14は、信号発生部13からの制御信号(操縦信号又は特性データ信号)を高周波変調(例えば、AM変調やFM変調)や、スペクトル拡散等で変調した後、アンテナから電波として受信機20を介してサーボ装置30に送信している。
【0025】
<受信機>
受信機20は、アンテナから電波として受信した送信機10からの受信電波を増幅し、制御信号に復調してサーボ装置30に出力する周知の受信装置である。
【0026】
<サーボ装置>
サーボ装置30は、受信機20を介して受信した制御信号に基づき、被操作体における可動部位(例えば、被操作体が模型飛行機であれば、ラダー、エルロン、エレベータ、エンジンスロットル等に相当)をそれぞれ独立して駆動制御するための装置であり、制御部31と、駆動機構32とを備えて構成される。
【0027】
(制御部)
制御部31は、送信機10からの操縦信号に基づき駆動機構32を駆動制御する制御用LSI(Large Scale Integration )であり、信号処理部33と、モータ制御部34と、記憶部35とを備えて各部の駆動制御を行っている。
【0028】
信号処理部33は、モード処理手段33aと、パルス幅検出手段33bと、信号判定手段33cと、操縦信号生成手段33dと、特性データ信号生成手段33eと、データ選択手段33fと、記憶アドレス生成手段33gとを備えて構成され、受信機20で受信した制御信号の入力経過時間の判定結果や信号のパルス幅の判定結果に基づき、制御信号から生成した操縦信号又は特性データ信号の生成や、記憶部35に対する書き込み処理等を行う。
【0029】
モード処理手段33aは、受信機20で前回受信した制御信号から次回入力するまでの経過時間に基づき、通常の操縦を行う操縦モード又は信号の種類を判別する信号判別モードに切り替え、切り替えたモード状態に応じたモード情報(操縦モード情報又は信号判定モード情報)をパルス幅検出手段33bと、データ選択手段33fに出力している。
【0030】
パルス幅検出手段33bは、モード処理手段33aからの信号判定モード情報に基づき、受信機20を介して入力した制御信号のパルス幅を検出し、その検出結果をパルス幅情報として信号判定手段33cに出力している。
【0031】
信号判定手段33cは、パルス幅検出手段33bからのパルス幅情報と予め設定された信号判定用情報(例えば、入力した制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値)とに基づき、入力した制御信号の種類を特定し、その判定結果を信号判定情報として、データ選択手段33fと記憶アドレス生成手段33gに出力している。
【0032】
操縦信号生成手段33dは、入力した制御信号が操縦信号であると仮定して制御信号から操縦信号を生成して一時的に保持している。なお、データ選択手段33fからのリセット信号に基づきリセットされる。
【0033】
特性データ信号生成手段33eは、入力した制御信号が特性データ信号であると仮定して制御信号から特性データ信号を生成して一時的に保持している。なお、データ選択手段33fからのリセット信号に基づきリセットされる。
【0034】
データ選択手段33fは、信号判定手段33cからの信号判定情報に基づき、操縦信号生成手段33d又は特性データ信号生成手段33eから、生成された操縦信号又は特性データ信号を選択抽出して、記憶部35に書き込みを行っている。また、データ選択手段33eは、モード処理手段33aからの操縦モード情報を入力すると、操縦信号生成手段33dから操縦信号を選択抽出して記憶部35に書き込みを行っている。
なお、データ選択手段33fは、操縦信号又は特性データ信号の何れかの信号を抽出した際に、現在保持されている各信号のリセットを行うリセット信号を操縦信号生成手段33d及び特性データ信号生成手段33eに出力している。
【0035】
記憶アドレス生成手段33gは、信号判定手段33cからの信号判定情報に基づき生成された操縦信号又は特性データ信号を記憶させる記憶領域のアドレス指定(すなわち、記憶部35における操縦信号記憶手段35a又は特性データ記憶手段35bにおける各特性データに対応した記憶領域毎のアドレス指定)を行い、この指定した記憶アドレスを記憶部35に出力している。
【0036】
モータ制御部34は、位置検出部34eからの位置情報(駆動機構32の出力軸32cの回転位置を示す情報)に応じたパルス信号である位置信号を生成して出力する位置信号発生部34aと、位置信号のパルス幅と記憶部35に記憶された操縦信号のパルス幅とを比較してその差分となる差分パルス信号を生成して出力するパルス幅比較部34bと、比較出力である差分パルス信号を記憶部35に記憶される特性データに応じた駆動信号となるよう信号生成して出力するPWM生成回路34cと、この駆動信号に応じた正又は逆方向の電流を流して駆動機構32の回転方向を駆動制御するドライブ回路34dとを備えている。
【0037】
パルス幅比較部34bの比較処理としては、図3に示すように、目標値情報となる送信機10からの操縦信号と、位置検出部34eからの位置情報とをそれぞれディジタルフィルタ34fを通過させ、差分パルス生成部34gにて目標値情報と位置情報との足し合せにより差分パルス信号を生成している。このディジタルフィルタ34fとは、送信機からの操縦信号をそのまま反映すると急激なモータ駆動が起こる虞があるため、スムーズで、且つ滑らかな駆動となるように操縦信号、位置情報及び差分パルス信号に対し、特性データ信号に応じた補正を行うためのフィルタとして機能する。また、モータ32aの速度情報を検出する速度検出手段を駆動機構32に具備させ、操縦信号と位置情報に加え、速度情報を用いて差分パルス信号を生成することもできる。
【0038】
なお、モータ制御部34を1つのLSIとしてワンチップに実装したカスタムICの例であるが、当然、各部をそれぞれ独立した個々の回路として構成してもよい。
【0039】
記憶部35は、EEPROM(登録商標)等の書き換え可能な不揮発性メモリで構成され、操縦信号を記憶する操縦信号記憶手段35aと、特性データ信号を特性データとして記憶する特性データ記憶手段35bとを備え、データ選択手段33fからの操縦信号又は特性データ信号をそれぞれ更新記憶している。
【0040】
操縦信号記憶手段35aは、データ選択手段33fからの操縦信号を記憶する記憶領域であり、操縦信号が記憶されるように予め記憶アドレス(例えばアドレス「0」)が設定されている。
【0041】
特性データ記憶手段35bは、複数ある特性データを個別に記憶するように、特性データの数に基づいて記憶領域が分割されており、さらに各特性データに対応した記憶アドレス(例えば、図2におけるアドレス「1」〜「4」)が記憶領域毎に予め設定されている。従って、データ選択手段33fからの特性データ信号は、記憶アドレス生成手段33gによって生成された記憶アドレスに対応する記憶領域に記憶されることになる。
【0042】
なお、特性データの種類としては、例えば、サーボリバース(サーボの回転する方向の変更)、ニュートラル調整(出力軸の基準位置であるニュートラル位置の変更)、スピードコントロール(動作スピードの設定)、デッドバンド(不感帯の角度指定)、舵角調整(ニュートラル位置を中心とした左右の最大舵角の調整)、ブースト(サーボ駆動時にかける最小電流の設定)、ダンパ(ハンチングの抑制に係る設定)、ストレッチャ(目標位置へ戻ろうとするトルクと誤差の比例係数の指定)等がある。
【0043】
(駆動機構)
駆動機構32は、ドライバ回路34dから供給される駆動信号に基づく電流量によりモータ32aが駆動し、減速機構32bを介して接続される出力軸32cの回転によって可動部位を可動する動力伝達機構である。また、出力軸32cの回転位置は位置検出部34e(例えば、ポテンショメータ、ロータリーエンコーダ、レゾルバ等の出力軸32cの位置検出(回転角度)が可能な機器であればよい)によって検出され、その位置情報が位置信号発生部34aに出力される。
【0044】
[処理動作]
次に、本例の遠隔操作装置1におけるサーボ装置30の一連の処理動作について、図4を参照しながら説明する。
【0045】
図4に示すように、まず、電源がONされた後、サーボ装置30は受信機20を介して送信機10から操縦信号としての制御信号を受信する状態(操縦モード)となっている(ST1)。そして、モード処理手段33aで、送信機10から受信した制御信号の最後の受信タイミングから所定時間経過したか否かの判別を行う(ST2)。
【0046】
なお、図示しないが、ST2の処理と平行して、操縦信号生成手段33dは、入力した制御信号が操縦信号であると仮定して制御信号から操縦信号を生成して一時的に保持するとともに、特性データ信号生成手段33eでは、入力した制御信号が特性データ信号であると仮定して制御信号から特性データ信号を生成して一時的に保持される。
【0047】
ST2において、制御信号の最後の受信タイミングから所定時間経過したと判別すると(ST2−Yes)、モード状態として操縦モードから信号判別モードに切り替え(ST3)、パルス幅検出手段33bにおいてモード処理手段33aからの信号判定モード情報に基づき、受信機20を介して入力した制御信号のパルス幅を検出する(ST4)。次に、検出結果をパルス幅情報として信号判定手段33cに出力し(ST5)、信号判定手段33cにおいて、パルス幅検出手段33bからのパルス幅情報と予め設定された信号判定用情報とに基づき、入力した制御信号の種類を特定する(ST6)
【0048】
ST6において、入力した制御信号が操縦信号であった場合は(ST6−Yes)、その判定結果として制御信号が操縦信号であったことを示す信号判定情報を、データ選択手段33fと記憶アドレス生成手段33gに出力する(ST7)。そして、データ選択手段33fにおいて、信号判定手段33cからの信号判定情報に基づき、操縦信号生成手段33dから生成された操縦信号を選択抽出し(ST8)、記憶アドレス生成手段33gで生成された操縦信号に対応する記憶アドレスに従って、操縦信号記憶手段35aに記憶させる(ST9)。
なお、ST9の処理は、後述するST23の処理と同様であるため、操縦信号の記憶処理の後はST24へと進み、操縦信号に基づき駆動機構32の駆動制御を行う。
【0049】
一方、入力した制御信号が操縦信号でない場合は(ST6−No)、その判定結果として制御信号が特性データ信号であったことを示す信号判定情報を、データ選択手段33fと記憶アドレス生成手段33gに出力し(ST10)、データ選択手段33fにおいて、信号判定手段33cからの信号判定情報に基づき、特性データ信号生成手段33eから生成された特性データ信号を選択抽出する(ST11)。そして、記憶アドレス生成手段33gで生成された各特性データ信号に対応した記憶アドレスに従って、特性データ記憶手段35b内の各記憶領域に記憶させ(ST12)、再度ST4へ戻る。
【0050】
ST2において、制御信号の最後の受信タイミングから所定時間経過していないと判別すると(ST2−No)、モード状態を操縦モードとして維持し(ST20)、現在のモード状態を示す操縦モード情報をデータ選択手段33fと記憶アドレス生成手段33gに出力する(ST21)。次に、データ選択手段33fにおいて、入力した操縦モード情報に基づき、操縦信号生成手段33dから操縦信号を選択抽出し(ST22)、記憶アドレス生成手段33gで生成された操縦信号に対応した記憶アドレスに応じて操縦信号記憶手段35aに操縦信号を記憶させ(ST23)。そして、モータ制御部34は、操縦信号記憶手段35aに記憶された操縦信号と、モータ32aの出力軸32cの位置情報から差分パルス信号を生成し、特性データに応じた駆動信号によって駆動機構32を駆動制御し(ST24)、再度ST2へと戻る。
【0051】
以上説明したように、上述したサーボ装置30は、受信機20を介して送信機10から制御信号を受信し、所定時間制御信号を受信しなかった場合は操縦モードから信号判別モードへとモード切替を行う。そして、次に受信した制御信号と信号判別用情報とを比較して信号の種類を判別し、受信した信号が特性データ信号であると判別すると、この信号を記憶部35に出力して特性データを書き換えて更新を行う。
【0052】
これにより、送信機10の空きチャンネルを利用する必要がなく、またPC等の外部装置を用いることなく、送信機10で生成した制御信号を受信機20を介してサーボ装置30に出力するだけで通常の被操作体の操作に加えて応答特性である特性データの設定を容易に行うことができるため、ユーザビリティの向上を図ることができる。
【0053】
ところで、上述した形態では、サーボ装置30の設定用としての設定部12、サーボ装置30の操作用としての操作部11として別構成で説明したが、例えば特性設定の際に設定部12における表示画面を見ながら操作部11による操作で設定内容を変更するように操作部11を設定部12の設定操作手段として利用する構成とすることもできる。
【0054】
また、送信機10から送信される特性データ信号として、サーボ装置30等の機器毎に1つのシリアルデータとして送信する構成で説明したが、特性データ信号を複数の機器に対する連続した1つのシリアルデータとして送信することもできる。
【符号の説明】
【0055】
1…遠隔操作装置
10…送信機
11…操作部
12…設定部
13…信号発生部
14…送信部
20…受信機
30…サーボ装置
31…制御部
32…駆動機構(32a…モータ、32b…減速機構、32c…出力軸)
33…信号処理部(33a…モード処理手段33a、33b…パルス幅検出手段、33c…信号判定手段、33d…操縦信号生成手段、33e…特性データ信号生成手段、33f…データ選択手段、33g…記憶アドレス生成手段)
34…モータ制御部(34a…位置信号発生部、34b…パルス幅比較部、34c…PWM生成回路、34d…ドライブ回路、34e…位置検出部、34f…ディジタルフィルタ、34g…差分パルス生成部)
35…記憶部(35a…操縦信号記憶手段、35b…特性データ記憶手段)
【特許請求の範囲】
【請求項1】
送信機からの制御信号を受信し、この制御信号を予め記憶部に記憶された特性データに応じた駆動信号に変換して駆動機構を駆動制御する制御部を備えたサーボ装置において、
前記制御部は、前記送信機からの制御信号が前記駆動機構を駆動制御するための操縦信号或いは前記特性データの応答特性を変更するための特性データ信号であるかを判別する信号処理部を備え、
前記記憶部は、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき前記特性データが更新記憶されることを特徴とするサーボ装置。
【請求項2】
前記特性データ信号は、応答特性を設定した情報を含むシリアルデータであり、前記操縦信号は、PWM信号であることを特徴とする請求項1記載のサーボ装置。
【請求項3】
前記信号処理部は、前記制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値を信号判別用情報として保持し、
前記送信機からの制御信号と、前記信号判別用情報とを比較して、前記制御信号が前記操縦信号或いは前記特性データ信号であるかの判別を行うことを特徴とする請求項1又は2記載のサーボ装置。
【請求項4】
前記記憶部は、前記操縦信号を記憶する操縦信号記憶手段と、複数ある前記特性データを個々に記憶する記憶領域が前記特性データの数に応じて分割され、前記特性データを該当する記憶領域に記憶させるための記憶アドレスが前記記憶領域毎に設定された特性データ記憶手段とを備え、
さらに、前記信号処理部は、前記操縦信号を前記操縦信号記憶手段に記憶するための記憶アドレスと、前記特性データを前記特性データ記憶手段の該当する記憶領域に記憶させるための記憶アドレスを生成する記憶アドレス生成手段を備え、
前記信号処理部は、入力した前記制御信号のパルス幅と前記信号判別用閾値とを比較し、前記制御信号が前記操縦信号であれば、前記記憶アドレス生成部で生成された前記記憶アドレスに従って前記操縦信号を前記操縦信号記憶手段に記憶させ、前記制御信号が前記特性データ信号であれば、前記記憶アドレスに従って前記特性データ信号を前記特性データ記憶手段の該当する記憶領域に記憶させることを特徴とする請求項3記載のサーボ装置。
【請求項5】
被操作体の可動部位毎に対応する各チャンネルに対応した操作部の操作量に応じた操縦信号又は応答特性である特性データを変更するための特性データ信号の何れかを制御信号として送信する送信機と、
前記送信機からの前記制御信号を受信する受信機と、
前記受信機を介して受信した前記制御信号が前記操縦信号であるか前記特性データ信号であるかを判別し、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき記憶部に記憶される前記特性データを更新記憶するサーボ装置と、
を備えたことを特徴とする遠隔操作装置。
【請求項1】
送信機からの制御信号を受信し、この制御信号を予め記憶部に記憶された特性データに応じた駆動信号に変換して駆動機構を駆動制御する制御部を備えたサーボ装置において、
前記制御部は、前記送信機からの制御信号が前記駆動機構を駆動制御するための操縦信号或いは前記特性データの応答特性を変更するための特性データ信号であるかを判別する信号処理部を備え、
前記記憶部は、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき前記特性データが更新記憶されることを特徴とするサーボ装置。
【請求項2】
前記特性データ信号は、応答特性を設定した情報を含むシリアルデータであり、前記操縦信号は、PWM信号であることを特徴とする請求項1記載のサーボ装置。
【請求項3】
前記信号処理部は、前記制御信号のパルス幅が所定長以下であるか否かを判別するためのパルス幅比較用閾値を信号判別用情報として保持し、
前記送信機からの制御信号と、前記信号判別用情報とを比較して、前記制御信号が前記操縦信号或いは前記特性データ信号であるかの判別を行うことを特徴とする請求項1又は2記載のサーボ装置。
【請求項4】
前記記憶部は、前記操縦信号を記憶する操縦信号記憶手段と、複数ある前記特性データを個々に記憶する記憶領域が前記特性データの数に応じて分割され、前記特性データを該当する記憶領域に記憶させるための記憶アドレスが前記記憶領域毎に設定された特性データ記憶手段とを備え、
さらに、前記信号処理部は、前記操縦信号を前記操縦信号記憶手段に記憶するための記憶アドレスと、前記特性データを前記特性データ記憶手段の該当する記憶領域に記憶させるための記憶アドレスを生成する記憶アドレス生成手段を備え、
前記信号処理部は、入力した前記制御信号のパルス幅と前記信号判別用閾値とを比較し、前記制御信号が前記操縦信号であれば、前記記憶アドレス生成部で生成された前記記憶アドレスに従って前記操縦信号を前記操縦信号記憶手段に記憶させ、前記制御信号が前記特性データ信号であれば、前記記憶アドレスに従って前記特性データ信号を前記特性データ記憶手段の該当する記憶領域に記憶させることを特徴とする請求項3記載のサーボ装置。
【請求項5】
被操作体の可動部位毎に対応する各チャンネルに対応した操作部の操作量に応じた操縦信号又は応答特性である特性データを変更するための特性データ信号の何れかを制御信号として送信する送信機と、
前記送信機からの前記制御信号を受信する受信機と、
前記受信機を介して受信した前記制御信号が前記操縦信号であるか前記特性データ信号であるかを判別し、前記制御信号が前記特性データ信号であると判別されたときに、受信した前記特性データ信号に基づき記憶部に記憶される前記特性データを更新記憶するサーボ装置と、
を備えたことを特徴とする遠隔操作装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−224(P2013−224A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−132359(P2011−132359)
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000201814)双葉電子工業株式会社 (201)
【出願人】(300057230)セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー (119)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000201814)双葉電子工業株式会社 (201)
【出願人】(300057230)セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー (119)
【Fターム(参考)】
[ Back to top ]