
サーマルプリンタ
【課題】プラテンローラとサーマルヘッドとの間の圧力を検出することが可能なサーマルヘッドを提供すること。
【解決手段】本発明は、印刷用紙9を搬送するプラテンローラ10と、印刷用紙9をプラテンローラ10に押し付け、かつ印刷用紙9に印刷を行うサーマルヘッド12と、プラテンローラ10とサーマルヘッド12との間の圧力に応じて電気抵抗が変化する感圧導電ゴム18からなり、圧力を検出する圧力センサ、とを具備するサーマルプリンタである。本発明によれば、感圧導電ゴム18が圧力センサとして機能することにより、プラテンローラ10とサーマルヘッド12との間に係る圧力を検出することが可能となる。
【解決手段】本発明は、印刷用紙9を搬送するプラテンローラ10と、印刷用紙9をプラテンローラ10に押し付け、かつ印刷用紙9に印刷を行うサーマルヘッド12と、プラテンローラ10とサーマルヘッド12との間の圧力に応じて電気抵抗が変化する感圧導電ゴム18からなり、圧力を検出する圧力センサ、とを具備するサーマルプリンタである。本発明によれば、感圧導電ゴム18が圧力センサとして機能することにより、プラテンローラ10とサーマルヘッド12との間に係る圧力を検出することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はサーマルプリンタに関する。
【背景技術】
【0002】
サーマルプリンタにおいては、印刷用紙を搬出するプラテンローラと、印刷用紙に印字を行うサーマルヘッドとの間の圧力を調整することが求められる。特許文献1には、導電部材を用いてサーマルヘッドとプラテンローラとのリリース状態の検出をする発明が開示されている。特許文献2には、サーマルヘッドとプラテンローラとの間の圧接力を可変にする発明が開示されている。特許文献3には、印刷用紙が搬送される際に、サーマルヘッドとプラテンローラとの接触圧を軽減させる発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−9625号公報
【特許文献2】特開平6−113096号公報
【特許文献3】特開2000−272151号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
サーマルプリンタでは、経年変化等によって、プラテンローラとサーマルヘッドとの間の圧力が変動することがある。圧力が変動すると、印字の精度、安定性等が悪化する可能性がある。本発明は上記課題に鑑み、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能なサーマルヘッドを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、印刷媒体を搬送するプラテンローラと、前記印刷媒体を前記プラテンローラに押し付け、かつ前記印刷媒体に印刷を行うサーマルヘッドと、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する導電体からなり、前記圧力を検出する圧力センサと、を具備するサーマルプリンタである。本発明によれば、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能となる。
【0006】
上記構成において、前記圧力センサにより検出された圧力が異常である場合、前記プラテンローラと前記サーマルヘッドとの間の圧力が変化するように、前記プラテンローラ及び前記サーマルヘッドの少なくとも一方を移動させるアクチュエータを備える構成とすることができる。この構成によれば、プラテンローラとサーマルヘッドとの間の圧力を調整し、正常な圧力とすることができる。
【0007】
上記構成において、前記圧力センサにより検出された圧力が異常である場合、ユーザに通知を行う通知手段を備える構成とすることができる。この構成によれば、ユーザは迅速に圧力の異常を知ることができる。
【0008】
上記構成において、複数の前記圧力センサが、前記プラテンローラの回転軸方向に沿って設けられ、前記回転軸方向に沿った複数の場所における前記圧力を検出する構成とすることができる。この構成によれば、回転軸方向に沿った圧力のバランスを精度高く検出することができる。
【0009】
上記構成において、複数の前記圧力センサが、前記プラテンローラの回転軸方向に垂直な方向に沿って設けられ、前記回転軸方向に垂直な方向に沿った複数の場所における前記圧力を検出する構成とすることができる。この構成によれば、回転軸方向に対して垂直な方向において、圧力のバランスを精度高く検出することができる。
【0010】
上記構成において、前記圧力センサは、前記サーマルヘッドの前記プラテンローラと対向する面とは反対側の面に設けられている構成とすることができる。
【0011】
上記構成において、前記導電体は、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する感圧導電ゴムであり、前記感圧導電ゴムは、前記サーマルヘッドを前記プラテンローラの方向に付勢する構成とすることができる。この構成によれば、サーマルプリンタの低コスト化を図ることができる。
【0012】
上記構成において、前記プラテンローラの回転軸となるシャフトを備え、前記圧力センサは、前記シャフトの前記サーマルヘッド側とは反対側に、前記シャフトから圧力を受けるように設けられている構成とすることができる。この構成によれば、プラテンローラが適切に設置されているか検出することができる。
【0013】
上記構成において前記プラテンローラは前記圧力センサを含む構成とすることができる。この構成によれば、サーマルプリンタの低コスト化が可能となる。
【0014】
上記構成において、前記プラテンローラの全体が前記導電体からなる構成とすることができる。この構成によれば、サーマルプリンタの低コスト化が可能となる。
【0015】
上記構成において、前記プラテンローラは、前記プラテンローラの回転軸方向に沿って形成された前記導電体からなる領域を有する構成とすることができる。この構成によれば、回転軸方向に沿った圧力のバランスを精度高く検出することができる。
【0016】
上記構成において、前記プラテンローラは、前記プラテンローラの曲面方向に沿って形成された前記導電体からなる領域を有する構成とすることができる。この構成によれば、曲面方向に沿った圧力のバランスを精度高く検出することができる。
【0017】
上記構成において、前記プラテンローラは、芯部と、前記芯部を覆いかつ前記プラテンローラの曲面を形成する外周部とを有し、前記外周部は、前記導電体からなる構成とすることができる。この構成によれば、プラテンローラを簡単な工程で形成することができる。
【0018】
上記構成において、前記外周部は、前記プラテンローラの回転軸方向において偏肉して形成されている構成とすることができる。この構成によれば、プラテンローラによる紙搬送の精度が高くなる。また、プラテンローラを簡単な工程で形成することができる。
【発明の効果】
【0019】
本発明によれば、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能なサーマルヘッドを提供することができる。
【図面の簡単な説明】
【0020】
【図1】図1は比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【図2】図2(a)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する模式図であり、図2(b)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図3】図3は実施例1に係るサーマルプリンタの制御を例示するフローチャートである。
【図4】図4(a)は実施例1の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図4(b)は実施例1の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【図5】図5は実施例2に係るサーマルプリンタの制御を例示するフローチャートである。
【図6】図6(a)は実施例3に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図6(b)は実施例3に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図7】図7は実施例3に係るサーマルプリンタの制御を例示するフローチャートである。
【図8】図8は実施例3に係るサーマルプリンタの制御を例示するフローチャートである。
【図9】図9(a)は実施例3の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図9(b)は実施例3の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図10】図10(a)は実施例4に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図であり、図10(b)は実施例4の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【図11】図11(a)は実施例5に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図11(b)は実施例5に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図12】図12(a)は実施例6に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図12(b)は実施例6に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図13】図13は、実施例6に係るサーマルプリンタの制御を例示するフローチャートである。
【図14】図14(a)は実施例7に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図14(b)は実施例7の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【図15】図15は実施例8に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【発明を実施するための形態】
【0021】
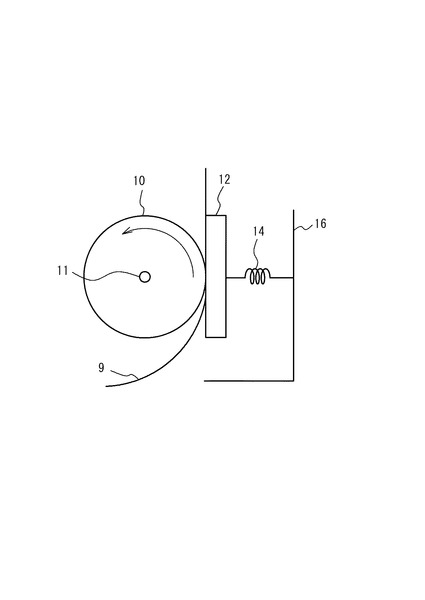
まず比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドについて説明し、問題点を明らかにする。図1は比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【0022】
図1に示すように、サーマルプリンタは、プラテンローラ10、サーマルヘッド12、弾性体14、及びフレーム16を備える。サーマルヘッド12は、プラテンローラ10と対向して設けられている。サーマルヘッド12とフレーム16との間は、例えばバネである弾性体14により連結されている。弾性体14の弾性力により、サーマルヘッド12はプラテンローラ10の方向に付勢され、プラテンローラ10に接触する。言い換えれば、サーマルヘッド12はプラテンローラ10に押し付けられる。プラテンローラ10は回転することにより、印刷用紙9(印刷媒体)をプラテンローラ10とサーマルヘッド12との間に搬送する。弾性体14の弾性力により、サーマルヘッド12は印刷用紙9をプラテンローラ10に押し付け、かつ加熱して印字を行う。印刷用紙9は、例えば感熱紙である。印刷用紙9はロール紙としてまとめられ、サーマルプリンタにセットされる。
【0023】
プラテンローラ10は例えばゴムからなる。弾性体14の弾性力により、サーマルヘッド12はプラテンローラ10に押し付けられる。このため、プラテンローラ10が変形したり、磨耗したりすることがある。プラテンローラ10の経年変化により、プラテンローラ10とサーマルヘッド12との間の圧力が変化することがある。また、プラテンローラ10が変形し凹凸が生じた場合、圧力が場所によって変化する。圧力が変化すると、サーマルプリンタが行う印字の精度、バランス等が悪化する。
【0024】
次に図面を用いて、本発明の実施例について説明する。
【実施例1】
【0025】
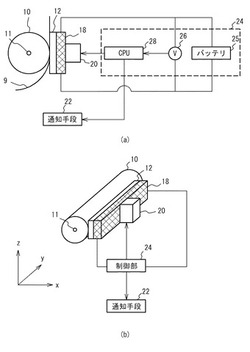
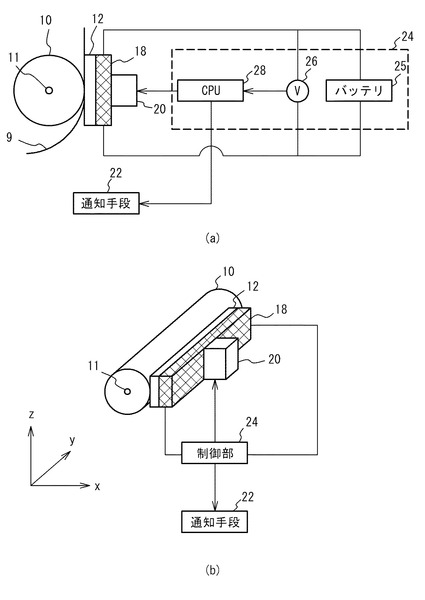
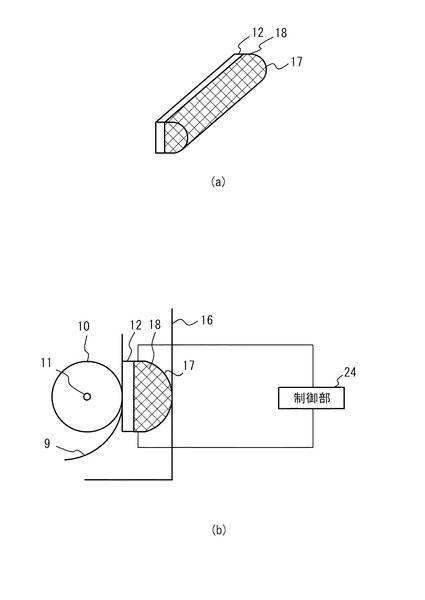
実施例1では、プラテンローラ10とサーマルヘッド12との間の圧力を測定し、圧力を調整する制御を行う。まずサーマルプリンタの構成について説明する。図2(a)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する模式図であり、図2(b)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。既述した構成と同じ構成については、説明を省略する。弾性体14及びフレーム16は、図の簡略化のため図示を省略したが、実際には、弾性体14がサーマルヘッド12をプラテンローラ10の方向に付勢する。また図2(b)では、制御部24を簡略化して図示している。なお、実際には、図15で後述するような軸受け部19にシャフト11が配置されるが、図2(a)及び図2(b)では軸受け部19は省略している。
【0026】
図2(a)及び図2(b)に示すように、実施例1に係るサーマルプリンタは、プラテンローラ10、サーマルヘッド12、弾性体14、フレーム16、感圧導電ゴム18(圧力センサ)、アクチュエータ20、通知手段22、及び制御部24を備える。制御部24は、バッテリ25、電圧計26、及びCPU(Central Processing Unit:中央演算装置)28を備える。
【0027】
図中に格子斜線で示す感圧導電ゴム18は、サーマルヘッド12のプラテンローラ10と対向する面とは反対側の面に設けられている。また、設けられている感圧導電ゴム18は1つである。アクチュエータ20は、感圧導電ゴム18の、サーマルヘッド12と接触する面とは反対側の面に設けられている。
【0028】
感圧導電ゴム18は、感圧導電ゴム18にかかる力に応じて電気抵抗が変化する。例えば圧力が大きくなると、感圧導電ゴム18の電気抵抗は小さくなる。圧力が小さくなると、感圧導電ゴム18の電気抵抗は大きくなる。感圧導電ゴム18には弾性体14の弾性力がかかる。言い換えれば、感圧導電ゴム18には、プラテンローラ10とサーマルヘッド12との間の圧力に起因する力と同じ力がかかる。また感圧導電ゴム18には、制御部24から電圧が印加される。電圧が印加されると、感圧導電ゴム18には電流が流れる。電圧計26は、感圧導電ゴム18に印加される電圧を測定することで、感圧導電ゴム18の電気抵抗を測定することができる。これにより、圧力を検出することができる。つまり、感圧導電ゴム18は、弾性体14の押圧によりプラテンローラ10とサーマルヘッド12との間の圧力を検出する圧力センサとして機能する。
【0029】
アクチュエータ20は例えばモータ又は圧電素子等である。アクチュエータ20は、サーマルヘッド12を図2(a)の横方向(x方向)に移動させる。アクチュエータ20は、プラテンローラ10とサーマルヘッド12との距離を変化させることで、プラテンローラ10とサーマルヘッド12との間の圧力を変化させることができる。通知手段22は、例えばスピーカ又はLED(Light Emitting Diode:発光ダイオード)等であり、アラーム又は点灯により通知を行う。通知手段22については、実施例2において詳述する。またy方向及びz方向についても後述する。
【0030】
バッテリ25は感圧導電ゴム18に電圧を印加する。電圧計26は、感圧導電ゴム18に印加される電圧を測定する。CPU28は、電圧計26により測定された電圧を取得する。このことは、CPU28がプラテンローラ10とサーマルヘッド12との間の圧力を取得することに対応する。CPU28は、バッテリ25による電圧印加、及びアクチュエータ20の動作を制御する。またCPU28は、後述する通知手段22の動作を制御する。例えばCPU28は、圧力が変化した場合でも、感圧導電ゴム18に一定の電流が流れるように、バッテリ25の制御を行う。
【0031】
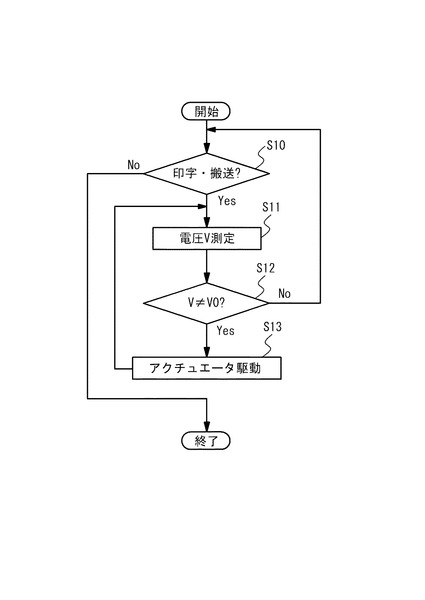
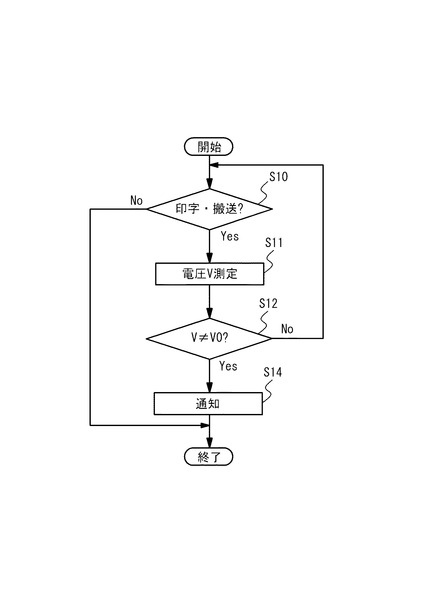
次に実施例1に係るサーマルプリンタが行う制御について説明する。図3は実施例1に係るサーマルプリンタが行う制御を例示するフローチャートである。
【0032】
図3に示すように、まずCPU28はサーマルヘッド12が印字しているか、及びプラテンローラ10が印刷用紙を搬送しているか判断する(ステップS10)。Noの場合、制御は終了する。Yesの場合、電圧計26は感圧導電ゴム18に印加されている電圧Vを測定する(ステップS11)。CPU28は、電圧計26により測定された電圧Vを取得する。上述のように、電圧Vの測定は、プラテンローラ10とサーマルヘッド12との間の圧力を測定することに対応する。
【0033】
ステップS11の後、CPU28は、測定された電圧Vが、基準電圧V0と異なるか判断する(ステップS12)。基準電圧V0とは、プラテンローラ10とサーマルヘッド12との間の圧力が正常である場合に、感圧導電ゴム18に印加される電圧である。つまり、CPU28は、圧力が異常であるか判断する。Noの場合、制御はステップS10に戻る。ステップS12でNoであることは、プラテンローラ10とサーマルヘッド12との間の圧力が正常であることを意味する。
【0034】
Yesの場合、CPU28はアクチュエータ20に、駆動を開始するための信号を送信する。ステップS12でYesであることは、プラテンローラ10とサーマルヘッド12との間の圧力が、正常な圧力から外れていること、つまり圧力が異常であることを意味する。信号を受信したアクチュエータ20は駆動する(ステップS13)。アクチュエータ20の駆動により、プラテンローラ10とサーマルヘッド12との距離が変化し、プラテンローラ10とサーマルヘッド12との間の圧力が調整される。ステップS13の後、制御はステップS11に戻り、再び圧力が正常であるか、異常であるか判断される。以上により、実施例1に係るサーマルプリンタの制御は終了する。
【0035】
実施例1によれば、感圧導電ゴム18は、プラテンローラ10とサーマルヘッド12との間の圧力に応じて電気抵抗が変化する。電圧計26が、感圧導電ゴム18に印加される電圧を測定することにより、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また、検出された圧力が異常である場合、アクチュエータ20がサーマルヘッド12を移動させる。これにより、プラテンローラ10とサーマルヘッド12との間の圧力を調整し、正常な圧力とすることができる。この結果、サーマルプリンタの印字の精度、バランス等が改善する。また紙詰まり等を抑制することも可能となる。
【0036】
アクチュエータ20としては、例えばモータ又はピエゾ素子等、サーマルヘッド12を移動させる手段を用いることができる。通電されない状態で元の状態に戻るアクチュエータ20を用いた場合、例えばサーマルプリンタの電源をオフにして、再度オンにしたときに、図3に例示した制御を再び行うことが求められるため、制御が複雑になる。制御を簡略化するためには、アクチュエータ20は、サーマルプリンタの電源がオフになった場合でも、駆動前の状態に戻らないことが好ましい。
【0037】
実施例1で用いた感圧導電ゴム18は、圧力が大きくなると電気抵抗が小さくなり、圧力が小さくなると電気抵抗が大きくなるものを用いたが、他の性質を有する感圧導電ゴムを用いてもよい。例えば、一定の圧力が加わった場合に導電性を有するような感圧導電ゴムを用いてもよい。また、導電体として感圧導電ゴム18を用いたが、圧力に応じて電気抵抗が変化する他の導電体を用いてもよい。他の導電体としては、例えば異方性導電フィルム等がある。さらに、電圧計26以外に感圧導電ゴム18の電気抵抗を検出できる他の手段、例えば電流計を用いてもよい。
【0038】
図3に示したように、実施例1に係るサーマルプリンタは電圧Vが基準電圧V0と異なることにより、圧力の異常を検出するとしたが、制御はこれに限定されない。例えばVが一定の範囲から外れたことにより、圧力の異常を検出してもよい。つまり、図3のステップS12において、Vα<V<Vβであるか判断してもよい。なおVα及びVβは、Vα<Vβとなる任意の値である。
【0039】
次に実施例1の変形例について説明する。図4(a)は実施例1の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図4(b)は実施例1の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。なお図4(b)では、図の簡略化のため、アクチュエータ20を省略し、かつ制御部24を簡略化して図示している。
【0040】
図4(a)に示すように、感圧導電ゴム18は、サーマルヘッド12と接している面とは反対側の面に湾曲部17を有する。図4(b)に示すように、感圧導電ゴム18の湾曲部17は、フレームと接触する。つまり、感圧導電ゴム18は弾性力を発生しやすいように設けられる。このため、感圧導電ゴム18は、サーマルヘッド12をプラテンローラ10の方向に付勢する弾性体として機能する。実施例1の変形例によれば、図1で示したような弾性体14を設けなくてもよいため、サーマルプリンタの低コスト化を図ることができる。なお、湾曲部17が形成されていなくても、感圧導電ゴム18は弾性体として機能する。
【実施例2】
【0041】
実施例2は、サーマルプリンタが通知を行う例である。サーマルプリンタの構成は、図2(a)及び図2(b)に例示したものと同じであるため、説明を省略する。
【0042】
実施例2に係るサーマルプリンタが行う制御について説明する。図5は実施例2に係るサーマルプリンタの制御を例示するフローチャートである。ステップS10〜S12の制御は、図3に例示したものと同じであるため、説明を省略する。
【0043】
図5に示すように、ステップS12においてNoの場合、制御はステップS10に戻る。ステップS12でNoであることは、プラテンローラ10とサーマルヘッド12との間の圧力が正常であることを意味する。
【0044】
Yesの場合、CPU28は信号を通知手段22に送信する。信号を受信した通知手段22は、プラテンローラ10とサーマルヘッド12との間の圧力が異常であることを、ユーザに通知する(ステップS14)。ステップS14の後、制御は終了する。
【0045】
実施例2によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。検出された圧力が異常である場合、通知手段22がユーザに通知を行う。これにより、ユーザは迅速に圧力の異常を知ることができる。通知を受けたユーザは、例えばプラテンローラ10のメンテナンス、交換等を行う。これにより、プラテンローラ10とサーマルヘッド12との間の圧力を正常な圧力とすることができる。
【0046】
なお、実施例1と実施例2とを組み合わせ、アクチュエータ20による圧力の調整(図3のステップS13)と、通知手段22による通知(図5のステップS14)との両方を行ってもよい。また図3の制御のみを行う場合、サーマルプリンタは通知手段22を備えず、アクチュエータ20を備えていればよい。また図5の制御のみを行う場合、サーマルプリンタはアクチュエータ20を備えず、通知手段22を備えていればよい。
【実施例3】
【0047】
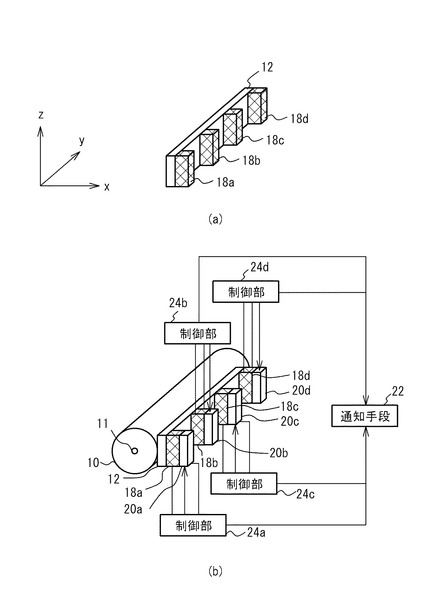
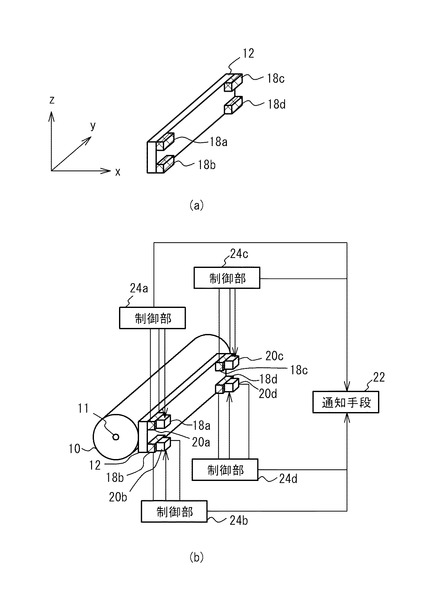
実施例3は、サーマルヘッド12に複数の感圧導電ゴム18が設けられている例である。図6(a)は実施例3に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図6(b)は実施例3に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0048】
図6(a)に示すように、サーマルヘッド12のプラテンローラ10に対向する面とは反対側の面に、複数の感圧導電ゴム18が設けられている。複数の感圧導電ゴム18a〜18dは、プラテンローラ10の回転軸方向(y方向)に沿って、設けられている。
【0049】
図6(b)に示すように、複数の感圧導電ゴム18a〜18dに対応して、複数のアクチュエータ20a〜20d及び複数の制御部24a〜24dが設けられている。複数の感圧導電ゴム18a〜18dの各々、及び複数のアクチュエータ20a〜20dの各々は、複数の制御部24a〜24dの各々に接続されている。複数の制御部24a〜24dの各々は、電圧計26及びCPU28を備える。
【0050】
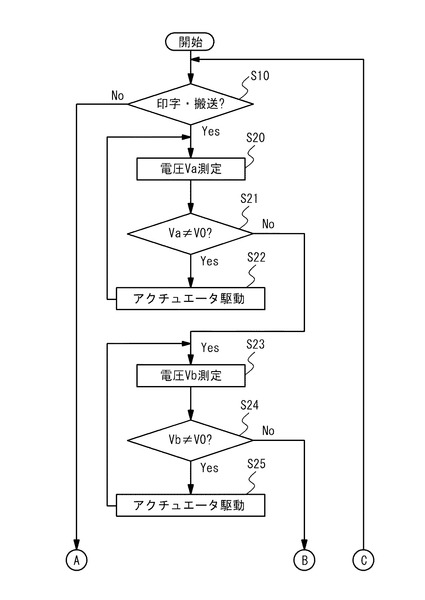
次に実施例3に係るサーマルプリンタの制御について説明する。図7及び図8は実施例3に係るサーマルプリンタの制御を例示する図である。
【0051】
図7に示すように、まず制御部24aが備えるCPU28はサーマルヘッド12が印字しているか、及びプラテンローラ10が印刷用紙を搬送しているか判断する(ステップS10)。Noの場合、制御は終了する(図7及び図8のA参照)。Yesの場合、制御部24aが備える電圧計26は感圧導電ゴム18aに印加されている電圧Vaを測定する(ステップS20)。CPU28は、電圧計26により測定された電圧Vaを取得する。
【0052】
ステップS20の後、CPU28は、取得した電圧Vaが、基準電圧Va0と異なるか判断する(ステップS21)。Yesの場合、制御部24aが備えるCPU28はアクチュエータ20aに、駆動させるための信号を送信する。信号を受信したアクチュエータ20aは駆動する(ステップS22)。アクチュエータ20aの駆動により、プラテンローラ10とサーマルヘッド12との距離が変化し、プラテンローラ10とサーマルヘッド12との間の圧力が調整される。
【0053】
ステップS21においてNoの場合、制御部24bが備える電圧計26は、感圧導電ゴム18bに印加されている電圧Vbを測定する(ステップS23)。CPU28は、電圧計26により測定された電圧Vbを取得する。CPU28は、電圧Vbが基準電圧Vb0と異なるか判断する(ステップS24)。Yesの場合、CPU28はアクチュエータ20bに信号を送信する。信号を受信したアクチュエータ20bは駆動する(ステップS25)。
【0054】
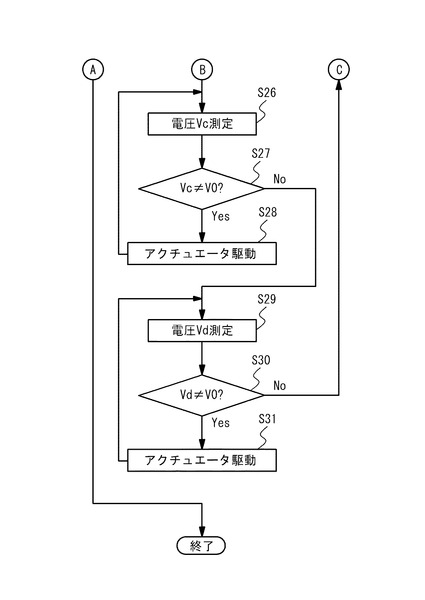
ステップS25においてNoの場合、制御は図8のステップS26に進む(図7及び図8のB参照)。ステップS26〜S28、及びステップS29〜S31は、それぞれステップS20〜S22に対応する。ただし、ステップS30においてNoの場合、制御は図7のステップS10に戻る(図7及び図8のC参照)。
【0055】
実施例3によれば、複数の感圧導電ゴム18a〜18dがプラテンローラ10の回転軸方向に沿って設けられている。このため、プラテンローラ10とサーマルヘッド12との間に加わる圧力を、回転軸方向に沿って検出することができる。このため、回転軸方向に沿った圧力のバランスを精度高く検出することができる。また、複数のアクチュエータ20a〜20dが、複数の感圧導電ゴム18a〜18dに対応して設けられている。このため、回転軸方向に沿って圧力を調整することが可能となる。
【0056】
例えば、制御部24dが備える電圧計26により検出された電圧Vdが、基準電圧Vd0と等しくない場合、つまり感圧導電ゴム18dにかかる圧力が小さい場合、印刷用紙の感圧導電ゴム18dに対応する領域では、印字が薄くなることがある。実施例3によれば、アクチュエータ20dにより圧力が調整されることにより、印刷用紙の感圧導電ゴム18に対応する領域でも、他の領域と同品質の印字が可能となる。
【0057】
図6(b)に示すように制御部24a〜24dの各々は、通知手段22に信号を送信することもできる。つまり実施例3において、図7のステップS22及びS25、並びに図8のステップS28及びS31の代わりに、通知手段22による通知を行うステップを実施してもよい。またステップS22、S25,S28及びS31を行い、かつ通知のステップを行ってもよい。このとき、通知手段22は、制御部24a〜24dに対応して、つまり感圧導電ゴム18a〜18dに対応して、異なる通知を行ってもよい。具体的には、通知手段22が、制御部24a〜24dごとに異なるアラームを鳴らす、又は異なる色のLEDを点灯させるなどしてもよい。また、各々が制御部24a〜24dの各々に対応する複数の通知手段を設けてもよい。ただし、サーマルプリンタの部品点数を削減して低コスト化を図るためには、通知手段22は1つであることが好ましい。また、制御部は4つとしたが、例えば制御部は1つとしてもよい。具体的には、例えば1つの制御部24が4つの電圧計26と1つのCPU28を備えるとしてもよい。
【0058】
次に実施例3の変形例について説明する。図9(a)は実施例3の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図9(b)は実施例3の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。なお、実施例3の変形例に係るサーマルプリンタの制御は、図7及び図8に示したものと同じであるため、説明を省略する。
【0059】
図9(a)に示すように、複数の感圧導電ゴム18a〜18dが、サーマルヘッド12の四隅に設けられている。言い換えれば、複数の感圧導電ゴム18a〜18dが、プラテンローラ10の回転軸方向(y方向)、及び回転軸方向に対して垂直な方向(z方向)に沿って設けられている。図9(b)に示すように、感圧導電ゴム18a〜18dに対応して、複数のアクチュエータ20a〜22d、及び複数の制御部24a〜24dが設けられている。
【0060】
実施例3の変形例によれば、複数の感圧導電ゴム18a〜18dが、サーマルヘッド12の四隅に設けられている。このため、サーマルヘッド12の四隅において、プラテンローラ10とサーマルヘッド12との間に加わる圧力を検出することができる。このため、回転軸方向だけでなく、回転軸方向に対して垂直な方向(z方向)においても、圧力のバランスを精度高く検出することができる。
【0061】
なお、実施例3及び実施例3の変形例では、感圧導電ゴムの個数を4つとしたが、感圧導電ゴムの個数は2つ以上とすればよく、例えば5つでも6つでもよい。また、感圧導電ゴム18が、z方向に沿って3つ以上設けられていてもよい。またz方向に沿って複数の感圧導電ゴム18が設けられ、かつy方向に沿って1つの感圧導電ゴム18が設けられている構成としてもよい。つまり、感圧導電ゴム18により、回転軸方向(y方向)、回転軸方向に垂直な方向(z方向)、及びy方向とz方向との両方に沿って、圧力を検出することができる。また、アクチュエータ20により、サーマルヘッド12をy方向、z方向、及びy方向とz方向との両方に沿って移動させ、圧力を調整することが可能となる。
【実施例4】
【0062】
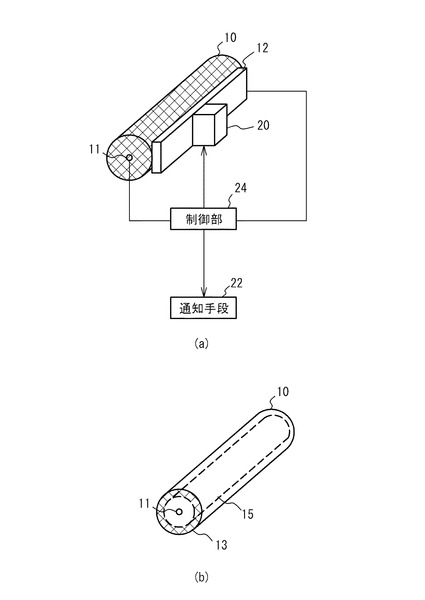
実施例4は、プラテンローラ10を感圧導電ゴムで形成した例である。図10(a)は実施例4に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。なお、実施例4に係るサーマルプリンタが行う制御は、図3に示したものと同じである。
【0063】
図10(a)に示すように、プラテンローラ10の全体が感圧導電ゴムにより形成されている。このため、プラテンローラ10とサーマルヘッド12との間の圧力が変化することで、プラテンローラ10の電気抵抗が変化する。つまりプラテンローラ10が圧力センサとして機能する。制御部24は、プラテンローラ10の回転軸として機能するシャフト11に接続されている。シャフト11とプラテンローラ10とは、電気的に接続されている。制御部24が備えるバッテリ25(図2(a)参照)は、シャフトを介してプラテンローラ10に電圧を印加する。制御部24が備える電圧計26(図2(a)参照)は、シャフト11を介して、プラテンローラ10に印加される電圧を測定することで、電気抵抗を検出することができる。制御部24が備えるCPU28は、圧力が異常である場合に、アクチュエータ20を駆動させる。
【0064】
実施例4によれば、実施例1等と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を正常な圧力に調整することができる。この結果、サーマルプリンタの印字の精度、バランス等が改善する。また、プラテンローラ10が感圧導電ゴムからなるため、圧力センサを別途設けなくてもよい。これにより、サーマルプリンタの低コスト化が可能となる。
【0065】
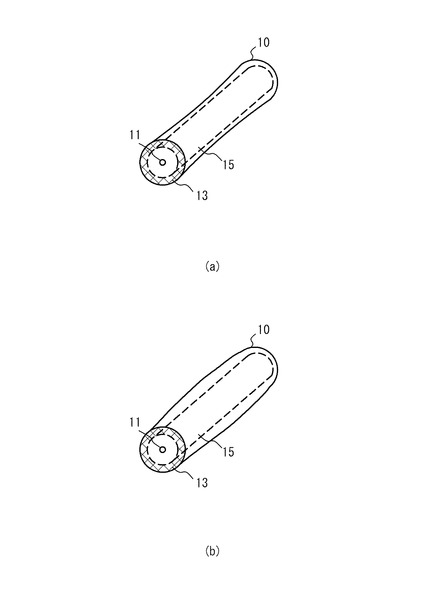
次に実施例4の変形例について説明する。図10(b)は実施例4の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0066】
図10(b)に示すように、感圧導電ゴムからなる外周部13と、例えば感圧導電ゴム以外のゴムからなる芯部15とからなる。図10(b)のような構成でもプラテンローラ10は圧力センサとして機能する。実施例4の変形例によれば、芯部15の周りを外周部13で覆うことにより、プラテンローラ10を簡単な工程で形成することができる。また、感圧導電ゴム以外に例えば異方性導電フィルムにより曲面を覆うとしてもよい。
【実施例5】
【0067】
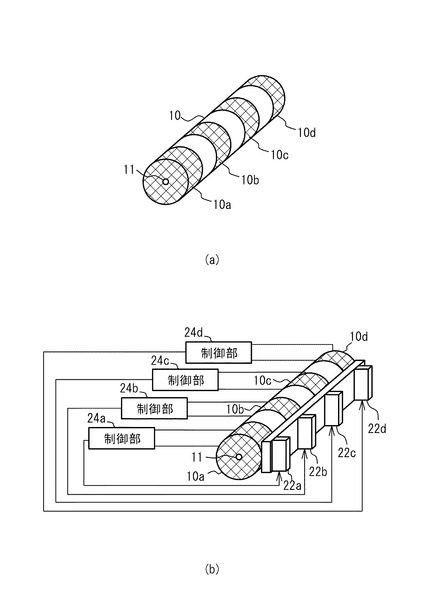
実施例5は、プラテンローラ10の回転軸方向に沿った複数の領域が感圧導電ゴムからなる例である。図11(a)は実施例5に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図11(b)は実施例5に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。図の簡略化のため、通知手段22は省略して図示している。なお、実施例5に係るサーマルプリンタの制御は、図7及び図8に示したものと同じであるため、説明を省略する。
【0068】
図11(a)に示すように、プラテンローラ10の回転軸方向に沿った複数の領域10a〜10dが、感圧導電ゴムからなる。感圧導電ゴムからなる領域10a〜10dと、領域10a〜10d以外の領域とは、回転軸方向に沿って交互に配置されている。プラテンローラ10の領域10a〜10dの各々が圧力センサとして機能する。また、図11(b)に示すように、複数の領域10a〜10dに対応して、複数のアクチュエータ20a〜20d、及び複数の制御部24a〜24dが設けられている。
【0069】
実施例5によれば、実施例3と同様に、プラテンローラ10とサーマルヘッド12との間に加わる圧力を、回転軸方向に沿って検出することができる。このため、回転軸方向に沿った圧力のバランスを精度高く検出することができる。また、回転軸方向に沿って圧力を調整することが可能となる。さらに実施例5によれば、実施例4と同様に、別途感圧導電ゴムを設けなくてよいため、サーマルプリンタの低コスト化が可能となる。
【0070】
印字のバランスを確保するためには、領域10a〜10dを形成する感圧導電ゴムと、領域10a〜10d以外の領域を形成する材質(例えばゴム等)とは、同程度の弾性率を有することが好ましい。感圧導電ゴムからなる領域の数は、領域10a〜10dの4つとしたが、例えば2つ、又は3つでもよいし、5つ以上としてもよい。領域は実施例5では、領域10a〜10dの全体が感圧導電ゴムからなるとしたが、構成はこれに限定されない。例えば、プラテンローラ10は外周部13と芯部15とを有し、外周部13の領域10a〜10dにおける曲面が感圧導電ゴムにより形成されていてもよい。
【実施例6】
【0071】
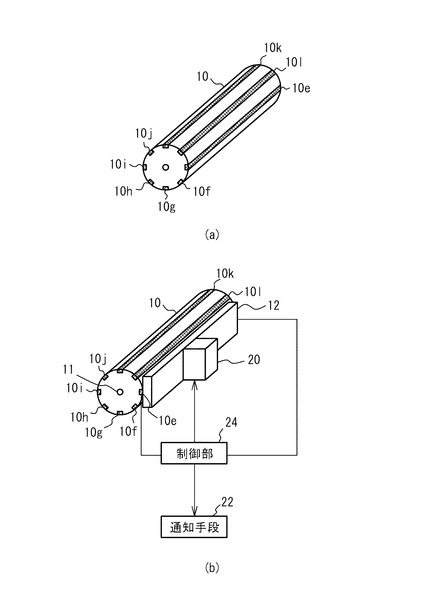
実施例6は、プラテンローラ10の曲面方向に沿った複数の領域が感圧導電ゴムからなる例である。図12(a)は実施例6に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図12(b)は実施例6に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0072】
図12(a)に示すように、プラテンローラ10の曲面に沿った複数の領域10e〜10lは、感圧導電ゴムからなる。間圧導電ゴムからなる領域10e〜10lと、領域10e〜10l以外の領域とは、曲面方向(回転方向)に沿って交互に配置されている。また、領域10e〜10lは、回転軸方向に沿ったプラテンローラ10の一端から他端まで延びている。領域10e〜10lの各々は、圧力センサとして機能する。図12(b)に示すように、サーマルヘッド12のプラテンローラ10と対向する面とは反対側の面に、アクチュエータ20が設けられている。制御部24は、領域10e〜10lの各々と接続されている。より詳細には、制御部24は複数の電圧計を備え、各電圧計が、領域10e〜10lの各々の電圧を測定する。また、制御部24が備えるCPU28は、通知手段22に通知をさせるための信号を送信する。またCPU28は、アクチュエータ20を駆動させるための信号を送信する。
【0073】
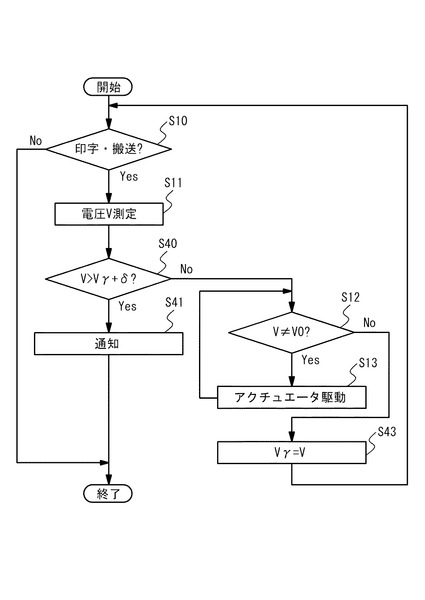
次に、実施例6に係るサーマルプリンタの制御について説明する。図13は、実施例6に係るサーマルプリンタの制御を例示するフローチャートである。
【0074】
図6に示すステップS10及びステップS11は、図3に示したものと同じ制御である。なおステップS11では、領域10e〜10lのうち1つの領域において、電圧Vが測定される。このことは、領域10e〜10lのうち1つの領域において、プラテンローラ10とサーマルヘッド12との間の圧力が測定されることに対応する。
【0075】
ステップS11の後、CPU28は取得した電圧Vが、電圧Vγ+δより大きいか判断する(ステップS40)。ステップS40は、紙詰まり等、印刷用紙の搬送に問題が発生しているか判断するステップである。測定された電圧Vが、閾値となるVγ+δより大きければ、プラテンローラ10とサーマルヘッド12との間の圧力が、閾値Vγ+δに対応する圧力より大きいことを意味する。例えば紙詰まりが発生していれば、折り重なった状態の印刷用紙がプラテンローラ10とサーマルヘッド12との間に搬送されるため、プラテンローラ10とサーマルヘッド12との間の圧力が大きくなる。圧力が大きくなれば、感圧導電ゴム18に印加される電圧Vは大きくなる。つまり、電圧Vが閾値Vγ+δより大きくなることにより、紙詰まりを検出することができる。
【0076】
なお後述するように、電圧Vγは、前のステップS11で電圧測定の対象となった領域以外の領域で、測定された電圧である。例えば、ステップS11で領域10eにおける電圧が測定対象であれば、電圧Vγは領域10f〜10lのいずれかにおける電圧となる。
【0077】
ステップS40においてYesの場合、通知手段22は通知を行う(ステップS41)。つまり通知手段22は、印刷用紙の搬送に問題が発生していることを、ユーザに通知する。ステップS41の後、制御は終了する。
【0078】
ステップS40においてNoの場合、CPU28は、電圧Vが、基準電圧V0と異なるか判断する(ステップS12)。Yesの場合、アクチュエータ20は駆動し、圧力を変化させる(ステップS13)。ステップS12及びS13は、図3に示したものと同じ制御である。ステップS13の後、制御はステップS12に戻る。ステップS12においてNoの場合、CPU28は電圧Vγを電圧Vとする(ステップS43)。ステップS43の後、制御はステップS10に戻る。
【0079】
実施例6によれば、プラテンローラ10とサーマルヘッド12との間に加わる圧力の変化を、曲面方向に沿って検出することができる。このため、曲面方向に沿った圧力のバランスを精度高く検出することができる。特に、紙詰まり、又は印刷用紙の張り付き等、印刷用紙の搬送に関する問題が発生した場合、領域10e〜10lごとに圧力が変化する可能性がある。例えば、領域10eでは正常な圧力が検出され、領域10fでは領域10eよりも高い圧力が検出された場合、領域10fでは例えば折り重なった状態の印刷用紙がプラテンローラ10とサーマルヘッド12との間に搬送される等、印刷用紙の搬送に関する問題が発生している可能性が高い。この場合、通知手段22が通知を行うことで、ユーザは迅速にメンテナンスを行うことができる。またアクチュエータ20が圧力を調整することもできる。
【0080】
なお、アクチュエータ20は設けなくてもよい。ただし、印刷用紙の搬送に関する問題を検出し、かつ圧力を調整するためには、通知手段22及びアクチュエータ20を設けることが好ましい。実施例6によれば、実施例4等と同様に、別途感圧導電ゴムを設けなくてよいため、サーマルプリンタの低コスト化も可能となる。
【0081】
感圧導電ゴムからなる領域の数は、領域10e〜10lの8つとしたが、例えば2つ〜7つでもよいし、9つ以上としてもよい。また実施例5と実施例6とを組み合わせてもよい。つまり、プラテンローラ10の回転軸方向に沿い、かつ曲面方向に沿って、感圧導電ゴムからなる領域を配置してもよい。例えば図11(a)に示した領域10a〜10dの各々が、曲面方向に沿って複数の領域(例えば図12(a)のように8つの領域)に分割されてもよい。これにより、回転軸方向及び、曲面方向においても、圧力のバランスを精度高く検出することができる。
【実施例7】
【0082】
実施例7は、プラテンローラ10を偏肉して形成した例である。図14(a)は実施例7に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0083】
図14(a)に示すように、プラテンローラ10は、感圧導電ゴムからなる外周部13と、例えば感圧導電ゴム以外のゴムからなる芯部15とからなる。つまり、印刷用紙が接触するプラテンローラ10の曲面は、感圧導電ゴムからなる。外周部13は、圧力センサとして機能する。芯部15は、回転軸方向に沿って太さが変化しない。つまり、芯部15は、シャフト11が貫通した穴を有する、円筒形である。これに対し、外周部13は、回転軸方向に沿って厚さが変化するように、偏肉して形成されている。例えば、外周部13の、回転軸方向の端部は、回転軸方向の中央部より厚い。言い換えれば、プラテンローラ10は、回転軸方向における端部の太さが、中央部の太さより大きい。
【0084】
実施例7によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また感圧導電ゴムからなる外周部13がプラテンローラ10の曲面を囲み、回転軸方向における端部より回転軸方向における中央部が厚くなるように形成されている。このため、プラテンローラ10による紙搬送の精度が高くなる。また、芯部15の周りを外周部13で覆うことにより、プラテンローラ10を簡単な工程で形成することができる。
【0085】
次に実施例7の変形例について説明する。図14(b)は実施例7の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0086】
図14(b)に示すように、外周部13の、回転軸方向の中央部は、回転軸方向の端部より厚い。言い換えれば、プラテンローラ10は、回転軸方向における中央部の太さが、端部の太さより大きい。なお、実施例3のようにプラテンローラ10全体が感圧導電ゴムからなる場合でも、回転軸方向における端部の太さと中央部の太さとを異ならせてもよい。
【実施例8】
【0087】
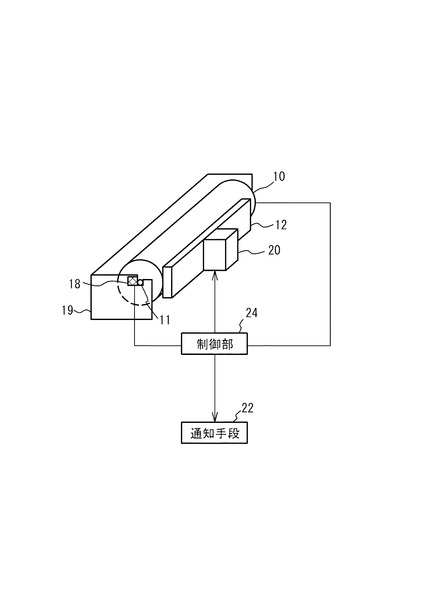
実施例8は、軸受けに感圧導電ゴム18を設けた例である。図15は実施例8に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0088】
図15に示すように、プラテンローラ10を貫通するシャフト11は、軸受け部19に支持されている。また感圧導電ゴム18が、シャフト11のサーマルヘッド12側とは反対側に、シャフト11と接触するように、軸受け部19に設けられている。このため、感圧導電ゴム18は、シャフト11から圧力を受ける。つまり感圧導電ゴム18は、シャフト11と接触することで、プラテンローラ10とサーマルヘッド12との間の圧力を受ける。なお、感圧導電ゴム18は、軸受け部19の図15において視認される側とは反対側にも設けられている。制御部24は、感圧導電ゴム18に接続されている。制御部24が備える電圧計26は、感圧導電ゴム18に印加される電圧を測定する。
【0089】
実施例8によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また、プラテンローラ10が適切に設置されていない場合、感圧導電ゴム18が検出する圧力が異常になることがある。例えばシャフト11が感圧導電ゴム18に接触しない場合、感圧導電ゴム18が検出する圧力はゼロとなる。実施例8によれば、プラテンローラ10が適切に設置されているか検出することができる。
【0090】
実施例1,2及び3では、サーマルヘッド12に感圧導電ゴム18を設けたが、構成はこれに限定されない。例えば軸受け部19にアクチュエータ20を設けて、軸受け部19及びプラテンローラ10を移動させて圧力を調整する構成としてもよい。またサーマルヘッド12及び軸受け部19の両方にアクチュエータ20を設けてもよい。つまり、アクチュエータ20は、サーマルヘッド12及びプラテンローラ10の少なくとも一方を移動させる。
【0091】
また、各実施例は組み合わせて用いることも可能である。つまり図2(b)、図4(b)、図6(b)及び図9(b)のようにサーマルヘッド12に感圧導電ゴム18を設け、かつ図10、図11(b)、図12(b)及び図14のようにプラテンローラ10の一部又は全部を感圧導電ゴムで形成してもよい。さらに図15のように、シャフト11に接触するように感圧導電ゴム18を設けてもよい。
【0092】
以上、本発明の実施例について詳述したが、本発明はかかる特定の実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0093】
プラテンローラ 10
領域 10a〜10l
シャフト 11
サーマルヘッド 12
外周部 13
芯部 15
湾曲部 17
感圧導電ゴム 18,18a〜18d
アクチュエータ 20,20a〜20d
通知手段 22
制御部 24,24a〜24d
CPU 28
【技術分野】
【0001】
本発明はサーマルプリンタに関する。
【背景技術】
【0002】
サーマルプリンタにおいては、印刷用紙を搬出するプラテンローラと、印刷用紙に印字を行うサーマルヘッドとの間の圧力を調整することが求められる。特許文献1には、導電部材を用いてサーマルヘッドとプラテンローラとのリリース状態の検出をする発明が開示されている。特許文献2には、サーマルヘッドとプラテンローラとの間の圧接力を可変にする発明が開示されている。特許文献3には、印刷用紙が搬送される際に、サーマルヘッドとプラテンローラとの接触圧を軽減させる発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−9625号公報
【特許文献2】特開平6−113096号公報
【特許文献3】特開2000−272151号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
サーマルプリンタでは、経年変化等によって、プラテンローラとサーマルヘッドとの間の圧力が変動することがある。圧力が変動すると、印字の精度、安定性等が悪化する可能性がある。本発明は上記課題に鑑み、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能なサーマルヘッドを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、印刷媒体を搬送するプラテンローラと、前記印刷媒体を前記プラテンローラに押し付け、かつ前記印刷媒体に印刷を行うサーマルヘッドと、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する導電体からなり、前記圧力を検出する圧力センサと、を具備するサーマルプリンタである。本発明によれば、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能となる。
【0006】
上記構成において、前記圧力センサにより検出された圧力が異常である場合、前記プラテンローラと前記サーマルヘッドとの間の圧力が変化するように、前記プラテンローラ及び前記サーマルヘッドの少なくとも一方を移動させるアクチュエータを備える構成とすることができる。この構成によれば、プラテンローラとサーマルヘッドとの間の圧力を調整し、正常な圧力とすることができる。
【0007】
上記構成において、前記圧力センサにより検出された圧力が異常である場合、ユーザに通知を行う通知手段を備える構成とすることができる。この構成によれば、ユーザは迅速に圧力の異常を知ることができる。
【0008】
上記構成において、複数の前記圧力センサが、前記プラテンローラの回転軸方向に沿って設けられ、前記回転軸方向に沿った複数の場所における前記圧力を検出する構成とすることができる。この構成によれば、回転軸方向に沿った圧力のバランスを精度高く検出することができる。
【0009】
上記構成において、複数の前記圧力センサが、前記プラテンローラの回転軸方向に垂直な方向に沿って設けられ、前記回転軸方向に垂直な方向に沿った複数の場所における前記圧力を検出する構成とすることができる。この構成によれば、回転軸方向に対して垂直な方向において、圧力のバランスを精度高く検出することができる。
【0010】
上記構成において、前記圧力センサは、前記サーマルヘッドの前記プラテンローラと対向する面とは反対側の面に設けられている構成とすることができる。
【0011】
上記構成において、前記導電体は、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する感圧導電ゴムであり、前記感圧導電ゴムは、前記サーマルヘッドを前記プラテンローラの方向に付勢する構成とすることができる。この構成によれば、サーマルプリンタの低コスト化を図ることができる。
【0012】
上記構成において、前記プラテンローラの回転軸となるシャフトを備え、前記圧力センサは、前記シャフトの前記サーマルヘッド側とは反対側に、前記シャフトから圧力を受けるように設けられている構成とすることができる。この構成によれば、プラテンローラが適切に設置されているか検出することができる。
【0013】
上記構成において前記プラテンローラは前記圧力センサを含む構成とすることができる。この構成によれば、サーマルプリンタの低コスト化が可能となる。
【0014】
上記構成において、前記プラテンローラの全体が前記導電体からなる構成とすることができる。この構成によれば、サーマルプリンタの低コスト化が可能となる。
【0015】
上記構成において、前記プラテンローラは、前記プラテンローラの回転軸方向に沿って形成された前記導電体からなる領域を有する構成とすることができる。この構成によれば、回転軸方向に沿った圧力のバランスを精度高く検出することができる。
【0016】
上記構成において、前記プラテンローラは、前記プラテンローラの曲面方向に沿って形成された前記導電体からなる領域を有する構成とすることができる。この構成によれば、曲面方向に沿った圧力のバランスを精度高く検出することができる。
【0017】
上記構成において、前記プラテンローラは、芯部と、前記芯部を覆いかつ前記プラテンローラの曲面を形成する外周部とを有し、前記外周部は、前記導電体からなる構成とすることができる。この構成によれば、プラテンローラを簡単な工程で形成することができる。
【0018】
上記構成において、前記外周部は、前記プラテンローラの回転軸方向において偏肉して形成されている構成とすることができる。この構成によれば、プラテンローラによる紙搬送の精度が高くなる。また、プラテンローラを簡単な工程で形成することができる。
【発明の効果】
【0019】
本発明によれば、プラテンローラとサーマルヘッドとの間の圧力を検出することが可能なサーマルヘッドを提供することができる。
【図面の簡単な説明】
【0020】
【図1】図1は比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【図2】図2(a)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する模式図であり、図2(b)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図3】図3は実施例1に係るサーマルプリンタの制御を例示するフローチャートである。
【図4】図4(a)は実施例1の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図4(b)は実施例1の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【図5】図5は実施例2に係るサーマルプリンタの制御を例示するフローチャートである。
【図6】図6(a)は実施例3に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図6(b)は実施例3に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図7】図7は実施例3に係るサーマルプリンタの制御を例示するフローチャートである。
【図8】図8は実施例3に係るサーマルプリンタの制御を例示するフローチャートである。
【図9】図9(a)は実施例3の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図9(b)は実施例3の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図10】図10(a)は実施例4に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図であり、図10(b)は実施例4の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【図11】図11(a)は実施例5に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図11(b)は実施例5に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図12】図12(a)は実施例6に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図12(b)は実施例6に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【図13】図13は、実施例6に係るサーマルプリンタの制御を例示するフローチャートである。
【図14】図14(a)は実施例7に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図14(b)は実施例7の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【図15】図15は実施例8に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【発明を実施するための形態】
【0021】
まず比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドについて説明し、問題点を明らかにする。図1は比較例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。
【0022】
図1に示すように、サーマルプリンタは、プラテンローラ10、サーマルヘッド12、弾性体14、及びフレーム16を備える。サーマルヘッド12は、プラテンローラ10と対向して設けられている。サーマルヘッド12とフレーム16との間は、例えばバネである弾性体14により連結されている。弾性体14の弾性力により、サーマルヘッド12はプラテンローラ10の方向に付勢され、プラテンローラ10に接触する。言い換えれば、サーマルヘッド12はプラテンローラ10に押し付けられる。プラテンローラ10は回転することにより、印刷用紙9(印刷媒体)をプラテンローラ10とサーマルヘッド12との間に搬送する。弾性体14の弾性力により、サーマルヘッド12は印刷用紙9をプラテンローラ10に押し付け、かつ加熱して印字を行う。印刷用紙9は、例えば感熱紙である。印刷用紙9はロール紙としてまとめられ、サーマルプリンタにセットされる。
【0023】
プラテンローラ10は例えばゴムからなる。弾性体14の弾性力により、サーマルヘッド12はプラテンローラ10に押し付けられる。このため、プラテンローラ10が変形したり、磨耗したりすることがある。プラテンローラ10の経年変化により、プラテンローラ10とサーマルヘッド12との間の圧力が変化することがある。また、プラテンローラ10が変形し凹凸が生じた場合、圧力が場所によって変化する。圧力が変化すると、サーマルプリンタが行う印字の精度、バランス等が悪化する。
【0024】
次に図面を用いて、本発明の実施例について説明する。
【実施例1】
【0025】
実施例1では、プラテンローラ10とサーマルヘッド12との間の圧力を測定し、圧力を調整する制御を行う。まずサーマルプリンタの構成について説明する。図2(a)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する模式図であり、図2(b)は実施例1に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。既述した構成と同じ構成については、説明を省略する。弾性体14及びフレーム16は、図の簡略化のため図示を省略したが、実際には、弾性体14がサーマルヘッド12をプラテンローラ10の方向に付勢する。また図2(b)では、制御部24を簡略化して図示している。なお、実際には、図15で後述するような軸受け部19にシャフト11が配置されるが、図2(a)及び図2(b)では軸受け部19は省略している。
【0026】
図2(a)及び図2(b)に示すように、実施例1に係るサーマルプリンタは、プラテンローラ10、サーマルヘッド12、弾性体14、フレーム16、感圧導電ゴム18(圧力センサ)、アクチュエータ20、通知手段22、及び制御部24を備える。制御部24は、バッテリ25、電圧計26、及びCPU(Central Processing Unit:中央演算装置)28を備える。
【0027】
図中に格子斜線で示す感圧導電ゴム18は、サーマルヘッド12のプラテンローラ10と対向する面とは反対側の面に設けられている。また、設けられている感圧導電ゴム18は1つである。アクチュエータ20は、感圧導電ゴム18の、サーマルヘッド12と接触する面とは反対側の面に設けられている。
【0028】
感圧導電ゴム18は、感圧導電ゴム18にかかる力に応じて電気抵抗が変化する。例えば圧力が大きくなると、感圧導電ゴム18の電気抵抗は小さくなる。圧力が小さくなると、感圧導電ゴム18の電気抵抗は大きくなる。感圧導電ゴム18には弾性体14の弾性力がかかる。言い換えれば、感圧導電ゴム18には、プラテンローラ10とサーマルヘッド12との間の圧力に起因する力と同じ力がかかる。また感圧導電ゴム18には、制御部24から電圧が印加される。電圧が印加されると、感圧導電ゴム18には電流が流れる。電圧計26は、感圧導電ゴム18に印加される電圧を測定することで、感圧導電ゴム18の電気抵抗を測定することができる。これにより、圧力を検出することができる。つまり、感圧導電ゴム18は、弾性体14の押圧によりプラテンローラ10とサーマルヘッド12との間の圧力を検出する圧力センサとして機能する。
【0029】
アクチュエータ20は例えばモータ又は圧電素子等である。アクチュエータ20は、サーマルヘッド12を図2(a)の横方向(x方向)に移動させる。アクチュエータ20は、プラテンローラ10とサーマルヘッド12との距離を変化させることで、プラテンローラ10とサーマルヘッド12との間の圧力を変化させることができる。通知手段22は、例えばスピーカ又はLED(Light Emitting Diode:発光ダイオード)等であり、アラーム又は点灯により通知を行う。通知手段22については、実施例2において詳述する。またy方向及びz方向についても後述する。
【0030】
バッテリ25は感圧導電ゴム18に電圧を印加する。電圧計26は、感圧導電ゴム18に印加される電圧を測定する。CPU28は、電圧計26により測定された電圧を取得する。このことは、CPU28がプラテンローラ10とサーマルヘッド12との間の圧力を取得することに対応する。CPU28は、バッテリ25による電圧印加、及びアクチュエータ20の動作を制御する。またCPU28は、後述する通知手段22の動作を制御する。例えばCPU28は、圧力が変化した場合でも、感圧導電ゴム18に一定の電流が流れるように、バッテリ25の制御を行う。
【0031】
次に実施例1に係るサーマルプリンタが行う制御について説明する。図3は実施例1に係るサーマルプリンタが行う制御を例示するフローチャートである。
【0032】
図3に示すように、まずCPU28はサーマルヘッド12が印字しているか、及びプラテンローラ10が印刷用紙を搬送しているか判断する(ステップS10)。Noの場合、制御は終了する。Yesの場合、電圧計26は感圧導電ゴム18に印加されている電圧Vを測定する(ステップS11)。CPU28は、電圧計26により測定された電圧Vを取得する。上述のように、電圧Vの測定は、プラテンローラ10とサーマルヘッド12との間の圧力を測定することに対応する。
【0033】
ステップS11の後、CPU28は、測定された電圧Vが、基準電圧V0と異なるか判断する(ステップS12)。基準電圧V0とは、プラテンローラ10とサーマルヘッド12との間の圧力が正常である場合に、感圧導電ゴム18に印加される電圧である。つまり、CPU28は、圧力が異常であるか判断する。Noの場合、制御はステップS10に戻る。ステップS12でNoであることは、プラテンローラ10とサーマルヘッド12との間の圧力が正常であることを意味する。
【0034】
Yesの場合、CPU28はアクチュエータ20に、駆動を開始するための信号を送信する。ステップS12でYesであることは、プラテンローラ10とサーマルヘッド12との間の圧力が、正常な圧力から外れていること、つまり圧力が異常であることを意味する。信号を受信したアクチュエータ20は駆動する(ステップS13)。アクチュエータ20の駆動により、プラテンローラ10とサーマルヘッド12との距離が変化し、プラテンローラ10とサーマルヘッド12との間の圧力が調整される。ステップS13の後、制御はステップS11に戻り、再び圧力が正常であるか、異常であるか判断される。以上により、実施例1に係るサーマルプリンタの制御は終了する。
【0035】
実施例1によれば、感圧導電ゴム18は、プラテンローラ10とサーマルヘッド12との間の圧力に応じて電気抵抗が変化する。電圧計26が、感圧導電ゴム18に印加される電圧を測定することにより、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また、検出された圧力が異常である場合、アクチュエータ20がサーマルヘッド12を移動させる。これにより、プラテンローラ10とサーマルヘッド12との間の圧力を調整し、正常な圧力とすることができる。この結果、サーマルプリンタの印字の精度、バランス等が改善する。また紙詰まり等を抑制することも可能となる。
【0036】
アクチュエータ20としては、例えばモータ又はピエゾ素子等、サーマルヘッド12を移動させる手段を用いることができる。通電されない状態で元の状態に戻るアクチュエータ20を用いた場合、例えばサーマルプリンタの電源をオフにして、再度オンにしたときに、図3に例示した制御を再び行うことが求められるため、制御が複雑になる。制御を簡略化するためには、アクチュエータ20は、サーマルプリンタの電源がオフになった場合でも、駆動前の状態に戻らないことが好ましい。
【0037】
実施例1で用いた感圧導電ゴム18は、圧力が大きくなると電気抵抗が小さくなり、圧力が小さくなると電気抵抗が大きくなるものを用いたが、他の性質を有する感圧導電ゴムを用いてもよい。例えば、一定の圧力が加わった場合に導電性を有するような感圧導電ゴムを用いてもよい。また、導電体として感圧導電ゴム18を用いたが、圧力に応じて電気抵抗が変化する他の導電体を用いてもよい。他の導電体としては、例えば異方性導電フィルム等がある。さらに、電圧計26以外に感圧導電ゴム18の電気抵抗を検出できる他の手段、例えば電流計を用いてもよい。
【0038】
図3に示したように、実施例1に係るサーマルプリンタは電圧Vが基準電圧V0と異なることにより、圧力の異常を検出するとしたが、制御はこれに限定されない。例えばVが一定の範囲から外れたことにより、圧力の異常を検出してもよい。つまり、図3のステップS12において、Vα<V<Vβであるか判断してもよい。なおVα及びVβは、Vα<Vβとなる任意の値である。
【0039】
次に実施例1の変形例について説明する。図4(a)は実施例1の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図4(b)は実施例1の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する側面図である。なお図4(b)では、図の簡略化のため、アクチュエータ20を省略し、かつ制御部24を簡略化して図示している。
【0040】
図4(a)に示すように、感圧導電ゴム18は、サーマルヘッド12と接している面とは反対側の面に湾曲部17を有する。図4(b)に示すように、感圧導電ゴム18の湾曲部17は、フレームと接触する。つまり、感圧導電ゴム18は弾性力を発生しやすいように設けられる。このため、感圧導電ゴム18は、サーマルヘッド12をプラテンローラ10の方向に付勢する弾性体として機能する。実施例1の変形例によれば、図1で示したような弾性体14を設けなくてもよいため、サーマルプリンタの低コスト化を図ることができる。なお、湾曲部17が形成されていなくても、感圧導電ゴム18は弾性体として機能する。
【実施例2】
【0041】
実施例2は、サーマルプリンタが通知を行う例である。サーマルプリンタの構成は、図2(a)及び図2(b)に例示したものと同じであるため、説明を省略する。
【0042】
実施例2に係るサーマルプリンタが行う制御について説明する。図5は実施例2に係るサーマルプリンタの制御を例示するフローチャートである。ステップS10〜S12の制御は、図3に例示したものと同じであるため、説明を省略する。
【0043】
図5に示すように、ステップS12においてNoの場合、制御はステップS10に戻る。ステップS12でNoであることは、プラテンローラ10とサーマルヘッド12との間の圧力が正常であることを意味する。
【0044】
Yesの場合、CPU28は信号を通知手段22に送信する。信号を受信した通知手段22は、プラテンローラ10とサーマルヘッド12との間の圧力が異常であることを、ユーザに通知する(ステップS14)。ステップS14の後、制御は終了する。
【0045】
実施例2によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。検出された圧力が異常である場合、通知手段22がユーザに通知を行う。これにより、ユーザは迅速に圧力の異常を知ることができる。通知を受けたユーザは、例えばプラテンローラ10のメンテナンス、交換等を行う。これにより、プラテンローラ10とサーマルヘッド12との間の圧力を正常な圧力とすることができる。
【0046】
なお、実施例1と実施例2とを組み合わせ、アクチュエータ20による圧力の調整(図3のステップS13)と、通知手段22による通知(図5のステップS14)との両方を行ってもよい。また図3の制御のみを行う場合、サーマルプリンタは通知手段22を備えず、アクチュエータ20を備えていればよい。また図5の制御のみを行う場合、サーマルプリンタはアクチュエータ20を備えず、通知手段22を備えていればよい。
【実施例3】
【0047】
実施例3は、サーマルヘッド12に複数の感圧導電ゴム18が設けられている例である。図6(a)は実施例3に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図6(b)は実施例3に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0048】
図6(a)に示すように、サーマルヘッド12のプラテンローラ10に対向する面とは反対側の面に、複数の感圧導電ゴム18が設けられている。複数の感圧導電ゴム18a〜18dは、プラテンローラ10の回転軸方向(y方向)に沿って、設けられている。
【0049】
図6(b)に示すように、複数の感圧導電ゴム18a〜18dに対応して、複数のアクチュエータ20a〜20d及び複数の制御部24a〜24dが設けられている。複数の感圧導電ゴム18a〜18dの各々、及び複数のアクチュエータ20a〜20dの各々は、複数の制御部24a〜24dの各々に接続されている。複数の制御部24a〜24dの各々は、電圧計26及びCPU28を備える。
【0050】
次に実施例3に係るサーマルプリンタの制御について説明する。図7及び図8は実施例3に係るサーマルプリンタの制御を例示する図である。
【0051】
図7に示すように、まず制御部24aが備えるCPU28はサーマルヘッド12が印字しているか、及びプラテンローラ10が印刷用紙を搬送しているか判断する(ステップS10)。Noの場合、制御は終了する(図7及び図8のA参照)。Yesの場合、制御部24aが備える電圧計26は感圧導電ゴム18aに印加されている電圧Vaを測定する(ステップS20)。CPU28は、電圧計26により測定された電圧Vaを取得する。
【0052】
ステップS20の後、CPU28は、取得した電圧Vaが、基準電圧Va0と異なるか判断する(ステップS21)。Yesの場合、制御部24aが備えるCPU28はアクチュエータ20aに、駆動させるための信号を送信する。信号を受信したアクチュエータ20aは駆動する(ステップS22)。アクチュエータ20aの駆動により、プラテンローラ10とサーマルヘッド12との距離が変化し、プラテンローラ10とサーマルヘッド12との間の圧力が調整される。
【0053】
ステップS21においてNoの場合、制御部24bが備える電圧計26は、感圧導電ゴム18bに印加されている電圧Vbを測定する(ステップS23)。CPU28は、電圧計26により測定された電圧Vbを取得する。CPU28は、電圧Vbが基準電圧Vb0と異なるか判断する(ステップS24)。Yesの場合、CPU28はアクチュエータ20bに信号を送信する。信号を受信したアクチュエータ20bは駆動する(ステップS25)。
【0054】
ステップS25においてNoの場合、制御は図8のステップS26に進む(図7及び図8のB参照)。ステップS26〜S28、及びステップS29〜S31は、それぞれステップS20〜S22に対応する。ただし、ステップS30においてNoの場合、制御は図7のステップS10に戻る(図7及び図8のC参照)。
【0055】
実施例3によれば、複数の感圧導電ゴム18a〜18dがプラテンローラ10の回転軸方向に沿って設けられている。このため、プラテンローラ10とサーマルヘッド12との間に加わる圧力を、回転軸方向に沿って検出することができる。このため、回転軸方向に沿った圧力のバランスを精度高く検出することができる。また、複数のアクチュエータ20a〜20dが、複数の感圧導電ゴム18a〜18dに対応して設けられている。このため、回転軸方向に沿って圧力を調整することが可能となる。
【0056】
例えば、制御部24dが備える電圧計26により検出された電圧Vdが、基準電圧Vd0と等しくない場合、つまり感圧導電ゴム18dにかかる圧力が小さい場合、印刷用紙の感圧導電ゴム18dに対応する領域では、印字が薄くなることがある。実施例3によれば、アクチュエータ20dにより圧力が調整されることにより、印刷用紙の感圧導電ゴム18に対応する領域でも、他の領域と同品質の印字が可能となる。
【0057】
図6(b)に示すように制御部24a〜24dの各々は、通知手段22に信号を送信することもできる。つまり実施例3において、図7のステップS22及びS25、並びに図8のステップS28及びS31の代わりに、通知手段22による通知を行うステップを実施してもよい。またステップS22、S25,S28及びS31を行い、かつ通知のステップを行ってもよい。このとき、通知手段22は、制御部24a〜24dに対応して、つまり感圧導電ゴム18a〜18dに対応して、異なる通知を行ってもよい。具体的には、通知手段22が、制御部24a〜24dごとに異なるアラームを鳴らす、又は異なる色のLEDを点灯させるなどしてもよい。また、各々が制御部24a〜24dの各々に対応する複数の通知手段を設けてもよい。ただし、サーマルプリンタの部品点数を削減して低コスト化を図るためには、通知手段22は1つであることが好ましい。また、制御部は4つとしたが、例えば制御部は1つとしてもよい。具体的には、例えば1つの制御部24が4つの電圧計26と1つのCPU28を備えるとしてもよい。
【0058】
次に実施例3の変形例について説明する。図9(a)は実施例3の変形例に係るサーマルプリンタが備えるサーマルヘッドを例示する斜視図であり、図9(b)は実施例3の変形例に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。なお、実施例3の変形例に係るサーマルプリンタの制御は、図7及び図8に示したものと同じであるため、説明を省略する。
【0059】
図9(a)に示すように、複数の感圧導電ゴム18a〜18dが、サーマルヘッド12の四隅に設けられている。言い換えれば、複数の感圧導電ゴム18a〜18dが、プラテンローラ10の回転軸方向(y方向)、及び回転軸方向に対して垂直な方向(z方向)に沿って設けられている。図9(b)に示すように、感圧導電ゴム18a〜18dに対応して、複数のアクチュエータ20a〜22d、及び複数の制御部24a〜24dが設けられている。
【0060】
実施例3の変形例によれば、複数の感圧導電ゴム18a〜18dが、サーマルヘッド12の四隅に設けられている。このため、サーマルヘッド12の四隅において、プラテンローラ10とサーマルヘッド12との間に加わる圧力を検出することができる。このため、回転軸方向だけでなく、回転軸方向に対して垂直な方向(z方向)においても、圧力のバランスを精度高く検出することができる。
【0061】
なお、実施例3及び実施例3の変形例では、感圧導電ゴムの個数を4つとしたが、感圧導電ゴムの個数は2つ以上とすればよく、例えば5つでも6つでもよい。また、感圧導電ゴム18が、z方向に沿って3つ以上設けられていてもよい。またz方向に沿って複数の感圧導電ゴム18が設けられ、かつy方向に沿って1つの感圧導電ゴム18が設けられている構成としてもよい。つまり、感圧導電ゴム18により、回転軸方向(y方向)、回転軸方向に垂直な方向(z方向)、及びy方向とz方向との両方に沿って、圧力を検出することができる。また、アクチュエータ20により、サーマルヘッド12をy方向、z方向、及びy方向とz方向との両方に沿って移動させ、圧力を調整することが可能となる。
【実施例4】
【0062】
実施例4は、プラテンローラ10を感圧導電ゴムで形成した例である。図10(a)は実施例4に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。なお、実施例4に係るサーマルプリンタが行う制御は、図3に示したものと同じである。
【0063】
図10(a)に示すように、プラテンローラ10の全体が感圧導電ゴムにより形成されている。このため、プラテンローラ10とサーマルヘッド12との間の圧力が変化することで、プラテンローラ10の電気抵抗が変化する。つまりプラテンローラ10が圧力センサとして機能する。制御部24は、プラテンローラ10の回転軸として機能するシャフト11に接続されている。シャフト11とプラテンローラ10とは、電気的に接続されている。制御部24が備えるバッテリ25(図2(a)参照)は、シャフトを介してプラテンローラ10に電圧を印加する。制御部24が備える電圧計26(図2(a)参照)は、シャフト11を介して、プラテンローラ10に印加される電圧を測定することで、電気抵抗を検出することができる。制御部24が備えるCPU28は、圧力が異常である場合に、アクチュエータ20を駆動させる。
【0064】
実施例4によれば、実施例1等と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を正常な圧力に調整することができる。この結果、サーマルプリンタの印字の精度、バランス等が改善する。また、プラテンローラ10が感圧導電ゴムからなるため、圧力センサを別途設けなくてもよい。これにより、サーマルプリンタの低コスト化が可能となる。
【0065】
次に実施例4の変形例について説明する。図10(b)は実施例4の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0066】
図10(b)に示すように、感圧導電ゴムからなる外周部13と、例えば感圧導電ゴム以外のゴムからなる芯部15とからなる。図10(b)のような構成でもプラテンローラ10は圧力センサとして機能する。実施例4の変形例によれば、芯部15の周りを外周部13で覆うことにより、プラテンローラ10を簡単な工程で形成することができる。また、感圧導電ゴム以外に例えば異方性導電フィルムにより曲面を覆うとしてもよい。
【実施例5】
【0067】
実施例5は、プラテンローラ10の回転軸方向に沿った複数の領域が感圧導電ゴムからなる例である。図11(a)は実施例5に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図11(b)は実施例5に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。図の簡略化のため、通知手段22は省略して図示している。なお、実施例5に係るサーマルプリンタの制御は、図7及び図8に示したものと同じであるため、説明を省略する。
【0068】
図11(a)に示すように、プラテンローラ10の回転軸方向に沿った複数の領域10a〜10dが、感圧導電ゴムからなる。感圧導電ゴムからなる領域10a〜10dと、領域10a〜10d以外の領域とは、回転軸方向に沿って交互に配置されている。プラテンローラ10の領域10a〜10dの各々が圧力センサとして機能する。また、図11(b)に示すように、複数の領域10a〜10dに対応して、複数のアクチュエータ20a〜20d、及び複数の制御部24a〜24dが設けられている。
【0069】
実施例5によれば、実施例3と同様に、プラテンローラ10とサーマルヘッド12との間に加わる圧力を、回転軸方向に沿って検出することができる。このため、回転軸方向に沿った圧力のバランスを精度高く検出することができる。また、回転軸方向に沿って圧力を調整することが可能となる。さらに実施例5によれば、実施例4と同様に、別途感圧導電ゴムを設けなくてよいため、サーマルプリンタの低コスト化が可能となる。
【0070】
印字のバランスを確保するためには、領域10a〜10dを形成する感圧導電ゴムと、領域10a〜10d以外の領域を形成する材質(例えばゴム等)とは、同程度の弾性率を有することが好ましい。感圧導電ゴムからなる領域の数は、領域10a〜10dの4つとしたが、例えば2つ、又は3つでもよいし、5つ以上としてもよい。領域は実施例5では、領域10a〜10dの全体が感圧導電ゴムからなるとしたが、構成はこれに限定されない。例えば、プラテンローラ10は外周部13と芯部15とを有し、外周部13の領域10a〜10dにおける曲面が感圧導電ゴムにより形成されていてもよい。
【実施例6】
【0071】
実施例6は、プラテンローラ10の曲面方向に沿った複数の領域が感圧導電ゴムからなる例である。図12(a)は実施例6に係るサーマルプリンタが備えるプラテンローラを例示する斜視図であり、図12(b)は実施例6に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0072】
図12(a)に示すように、プラテンローラ10の曲面に沿った複数の領域10e〜10lは、感圧導電ゴムからなる。間圧導電ゴムからなる領域10e〜10lと、領域10e〜10l以外の領域とは、曲面方向(回転方向)に沿って交互に配置されている。また、領域10e〜10lは、回転軸方向に沿ったプラテンローラ10の一端から他端まで延びている。領域10e〜10lの各々は、圧力センサとして機能する。図12(b)に示すように、サーマルヘッド12のプラテンローラ10と対向する面とは反対側の面に、アクチュエータ20が設けられている。制御部24は、領域10e〜10lの各々と接続されている。より詳細には、制御部24は複数の電圧計を備え、各電圧計が、領域10e〜10lの各々の電圧を測定する。また、制御部24が備えるCPU28は、通知手段22に通知をさせるための信号を送信する。またCPU28は、アクチュエータ20を駆動させるための信号を送信する。
【0073】
次に、実施例6に係るサーマルプリンタの制御について説明する。図13は、実施例6に係るサーマルプリンタの制御を例示するフローチャートである。
【0074】
図6に示すステップS10及びステップS11は、図3に示したものと同じ制御である。なおステップS11では、領域10e〜10lのうち1つの領域において、電圧Vが測定される。このことは、領域10e〜10lのうち1つの領域において、プラテンローラ10とサーマルヘッド12との間の圧力が測定されることに対応する。
【0075】
ステップS11の後、CPU28は取得した電圧Vが、電圧Vγ+δより大きいか判断する(ステップS40)。ステップS40は、紙詰まり等、印刷用紙の搬送に問題が発生しているか判断するステップである。測定された電圧Vが、閾値となるVγ+δより大きければ、プラテンローラ10とサーマルヘッド12との間の圧力が、閾値Vγ+δに対応する圧力より大きいことを意味する。例えば紙詰まりが発生していれば、折り重なった状態の印刷用紙がプラテンローラ10とサーマルヘッド12との間に搬送されるため、プラテンローラ10とサーマルヘッド12との間の圧力が大きくなる。圧力が大きくなれば、感圧導電ゴム18に印加される電圧Vは大きくなる。つまり、電圧Vが閾値Vγ+δより大きくなることにより、紙詰まりを検出することができる。
【0076】
なお後述するように、電圧Vγは、前のステップS11で電圧測定の対象となった領域以外の領域で、測定された電圧である。例えば、ステップS11で領域10eにおける電圧が測定対象であれば、電圧Vγは領域10f〜10lのいずれかにおける電圧となる。
【0077】
ステップS40においてYesの場合、通知手段22は通知を行う(ステップS41)。つまり通知手段22は、印刷用紙の搬送に問題が発生していることを、ユーザに通知する。ステップS41の後、制御は終了する。
【0078】
ステップS40においてNoの場合、CPU28は、電圧Vが、基準電圧V0と異なるか判断する(ステップS12)。Yesの場合、アクチュエータ20は駆動し、圧力を変化させる(ステップS13)。ステップS12及びS13は、図3に示したものと同じ制御である。ステップS13の後、制御はステップS12に戻る。ステップS12においてNoの場合、CPU28は電圧Vγを電圧Vとする(ステップS43)。ステップS43の後、制御はステップS10に戻る。
【0079】
実施例6によれば、プラテンローラ10とサーマルヘッド12との間に加わる圧力の変化を、曲面方向に沿って検出することができる。このため、曲面方向に沿った圧力のバランスを精度高く検出することができる。特に、紙詰まり、又は印刷用紙の張り付き等、印刷用紙の搬送に関する問題が発生した場合、領域10e〜10lごとに圧力が変化する可能性がある。例えば、領域10eでは正常な圧力が検出され、領域10fでは領域10eよりも高い圧力が検出された場合、領域10fでは例えば折り重なった状態の印刷用紙がプラテンローラ10とサーマルヘッド12との間に搬送される等、印刷用紙の搬送に関する問題が発生している可能性が高い。この場合、通知手段22が通知を行うことで、ユーザは迅速にメンテナンスを行うことができる。またアクチュエータ20が圧力を調整することもできる。
【0080】
なお、アクチュエータ20は設けなくてもよい。ただし、印刷用紙の搬送に関する問題を検出し、かつ圧力を調整するためには、通知手段22及びアクチュエータ20を設けることが好ましい。実施例6によれば、実施例4等と同様に、別途感圧導電ゴムを設けなくてよいため、サーマルプリンタの低コスト化も可能となる。
【0081】
感圧導電ゴムからなる領域の数は、領域10e〜10lの8つとしたが、例えば2つ〜7つでもよいし、9つ以上としてもよい。また実施例5と実施例6とを組み合わせてもよい。つまり、プラテンローラ10の回転軸方向に沿い、かつ曲面方向に沿って、感圧導電ゴムからなる領域を配置してもよい。例えば図11(a)に示した領域10a〜10dの各々が、曲面方向に沿って複数の領域(例えば図12(a)のように8つの領域)に分割されてもよい。これにより、回転軸方向及び、曲面方向においても、圧力のバランスを精度高く検出することができる。
【実施例7】
【0082】
実施例7は、プラテンローラ10を偏肉して形成した例である。図14(a)は実施例7に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0083】
図14(a)に示すように、プラテンローラ10は、感圧導電ゴムからなる外周部13と、例えば感圧導電ゴム以外のゴムからなる芯部15とからなる。つまり、印刷用紙が接触するプラテンローラ10の曲面は、感圧導電ゴムからなる。外周部13は、圧力センサとして機能する。芯部15は、回転軸方向に沿って太さが変化しない。つまり、芯部15は、シャフト11が貫通した穴を有する、円筒形である。これに対し、外周部13は、回転軸方向に沿って厚さが変化するように、偏肉して形成されている。例えば、外周部13の、回転軸方向の端部は、回転軸方向の中央部より厚い。言い換えれば、プラテンローラ10は、回転軸方向における端部の太さが、中央部の太さより大きい。
【0084】
実施例7によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また感圧導電ゴムからなる外周部13がプラテンローラ10の曲面を囲み、回転軸方向における端部より回転軸方向における中央部が厚くなるように形成されている。このため、プラテンローラ10による紙搬送の精度が高くなる。また、芯部15の周りを外周部13で覆うことにより、プラテンローラ10を簡単な工程で形成することができる。
【0085】
次に実施例7の変形例について説明する。図14(b)は実施例7の変形例に係るサーマルプリンタが備えるプラテンローラを例示する斜視図である。
【0086】
図14(b)に示すように、外周部13の、回転軸方向の中央部は、回転軸方向の端部より厚い。言い換えれば、プラテンローラ10は、回転軸方向における中央部の太さが、端部の太さより大きい。なお、実施例3のようにプラテンローラ10全体が感圧導電ゴムからなる場合でも、回転軸方向における端部の太さと中央部の太さとを異ならせてもよい。
【実施例8】
【0087】
実施例8は、軸受けに感圧導電ゴム18を設けた例である。図15は実施例8に係るサーマルプリンタが備えるプラテンローラ及びサーマルヘッドを例示する斜視図である。
【0088】
図15に示すように、プラテンローラ10を貫通するシャフト11は、軸受け部19に支持されている。また感圧導電ゴム18が、シャフト11のサーマルヘッド12側とは反対側に、シャフト11と接触するように、軸受け部19に設けられている。このため、感圧導電ゴム18は、シャフト11から圧力を受ける。つまり感圧導電ゴム18は、シャフト11と接触することで、プラテンローラ10とサーマルヘッド12との間の圧力を受ける。なお、感圧導電ゴム18は、軸受け部19の図15において視認される側とは反対側にも設けられている。制御部24は、感圧導電ゴム18に接続されている。制御部24が備える電圧計26は、感圧導電ゴム18に印加される電圧を測定する。
【0089】
実施例8によれば、実施例1と同様に、プラテンローラ10とサーマルヘッド12との間の圧力を検出することができる。また、プラテンローラ10が適切に設置されていない場合、感圧導電ゴム18が検出する圧力が異常になることがある。例えばシャフト11が感圧導電ゴム18に接触しない場合、感圧導電ゴム18が検出する圧力はゼロとなる。実施例8によれば、プラテンローラ10が適切に設置されているか検出することができる。
【0090】
実施例1,2及び3では、サーマルヘッド12に感圧導電ゴム18を設けたが、構成はこれに限定されない。例えば軸受け部19にアクチュエータ20を設けて、軸受け部19及びプラテンローラ10を移動させて圧力を調整する構成としてもよい。またサーマルヘッド12及び軸受け部19の両方にアクチュエータ20を設けてもよい。つまり、アクチュエータ20は、サーマルヘッド12及びプラテンローラ10の少なくとも一方を移動させる。
【0091】
また、各実施例は組み合わせて用いることも可能である。つまり図2(b)、図4(b)、図6(b)及び図9(b)のようにサーマルヘッド12に感圧導電ゴム18を設け、かつ図10、図11(b)、図12(b)及び図14のようにプラテンローラ10の一部又は全部を感圧導電ゴムで形成してもよい。さらに図15のように、シャフト11に接触するように感圧導電ゴム18を設けてもよい。
【0092】
以上、本発明の実施例について詳述したが、本発明はかかる特定の実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0093】
プラテンローラ 10
領域 10a〜10l
シャフト 11
サーマルヘッド 12
外周部 13
芯部 15
湾曲部 17
感圧導電ゴム 18,18a〜18d
アクチュエータ 20,20a〜20d
通知手段 22
制御部 24,24a〜24d
CPU 28
【特許請求の範囲】
【請求項1】
印刷媒体を搬送するプラテンローラと、
前記印刷媒体を前記プラテンローラに押し付け、かつ前記印刷媒体に印刷を行うサーマルヘッドと、
前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する導電体からなり、前記圧力を検出する圧力センサと、を具備することを特徴とするサーマルプリンタ。
【請求項2】
前記圧力センサにより検出された圧力が異常である場合、前記プラテンローラと前記サーマルヘッドとの間の圧力が変化するように、前記プラテンローラ及び前記サーマルヘッドの少なくとも一方を移動させるアクチュエータを備えることを特徴とする請求項1記載のサーマルプリンタ。
【請求項3】
前記圧力センサにより検出された圧力が異常である場合、ユーザに通知を行う通知手段を備えることを特徴とする請求項1又は2記載のサーマルプリンタ。
【請求項4】
複数の前記圧力センサが、前記プラテンローラの回転軸方向に沿って設けられ、前記回転軸方向に沿った複数の場所における前記圧力を検出することを特徴とする請求項1から3いずれか一項記載のサーマルプリンタ。
【請求項5】
複数の前記圧力センサが、前記プラテンローラの回転軸方向に垂直な方向に沿って設けられ、前記回転軸方向に垂直な方向に沿った複数の場所における前記圧力を検出することを特徴とする請求項1から4いずれか一項記載のサーマルプリンタ。
【請求項6】
前記圧力センサは、前記サーマルヘッドの前記プラテンローラと対向する面とは反対側の面に設けられていることを特徴とする請求項1から5いずれか一項記載のサーマルプリンタ。
【請求項7】
前記導電体は、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する感圧導電ゴムであり、
前記感圧導電ゴムは、前記サーマルヘッドを前記プラテンローラの方向に付勢することを特徴とする請求項6記載のサーマルプリンタ。
【請求項8】
前記プラテンローラの回転軸となるシャフトを備え、
前記圧力センサは、前記シャフトの前記サーマルヘッド側とは反対側に、前記シャフトから圧力を受けるように設けられていることを特徴とする請求項1から7いずれか一項記載のサーマルプリンタ。
【請求項9】
前記プラテンローラは前記圧力センサを含むことを特徴とする請求項1から8いずれか一項記載のサーマルプリンタ。
【請求項10】
前記プラテンローラの全体が前記導電体からなることを特徴とする請求項9記載のサーマルプリンタ。
【請求項11】
前記プラテンローラは、前記プラテンローラの回転軸方向に沿って形成された前記導電体からなる領域を有することを特徴とする請求項9記載のサーマルプリンタ。
【請求項12】
前記プラテンローラは、前記プラテンローラの曲面方向に沿って形成された前記導電体からなる領域を有することを特徴とする請求項9記載のサーマルプリンタ。
【請求項13】
前記プラテンローラは、芯部と、前記芯部を覆いかつ前記プラテンローラの曲面を形成する外周部とを有し、
前記外周部は、前記導電体からなることを特徴とする請求項9,11及び12いずれか一項記載のサーマルプリンタ。
【請求項14】
前記外周部は、前記プラテンローラの回転軸方向において偏肉して形成されていることを特徴とする請求項13記載のサーマルプリンタ。
【請求項1】
印刷媒体を搬送するプラテンローラと、
前記印刷媒体を前記プラテンローラに押し付け、かつ前記印刷媒体に印刷を行うサーマルヘッドと、
前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する導電体からなり、前記圧力を検出する圧力センサと、を具備することを特徴とするサーマルプリンタ。
【請求項2】
前記圧力センサにより検出された圧力が異常である場合、前記プラテンローラと前記サーマルヘッドとの間の圧力が変化するように、前記プラテンローラ及び前記サーマルヘッドの少なくとも一方を移動させるアクチュエータを備えることを特徴とする請求項1記載のサーマルプリンタ。
【請求項3】
前記圧力センサにより検出された圧力が異常である場合、ユーザに通知を行う通知手段を備えることを特徴とする請求項1又は2記載のサーマルプリンタ。
【請求項4】
複数の前記圧力センサが、前記プラテンローラの回転軸方向に沿って設けられ、前記回転軸方向に沿った複数の場所における前記圧力を検出することを特徴とする請求項1から3いずれか一項記載のサーマルプリンタ。
【請求項5】
複数の前記圧力センサが、前記プラテンローラの回転軸方向に垂直な方向に沿って設けられ、前記回転軸方向に垂直な方向に沿った複数の場所における前記圧力を検出することを特徴とする請求項1から4いずれか一項記載のサーマルプリンタ。
【請求項6】
前記圧力センサは、前記サーマルヘッドの前記プラテンローラと対向する面とは反対側の面に設けられていることを特徴とする請求項1から5いずれか一項記載のサーマルプリンタ。
【請求項7】
前記導電体は、前記プラテンローラと前記サーマルヘッドとの間の圧力に応じて電気抵抗が変化する感圧導電ゴムであり、
前記感圧導電ゴムは、前記サーマルヘッドを前記プラテンローラの方向に付勢することを特徴とする請求項6記載のサーマルプリンタ。
【請求項8】
前記プラテンローラの回転軸となるシャフトを備え、
前記圧力センサは、前記シャフトの前記サーマルヘッド側とは反対側に、前記シャフトから圧力を受けるように設けられていることを特徴とする請求項1から7いずれか一項記載のサーマルプリンタ。
【請求項9】
前記プラテンローラは前記圧力センサを含むことを特徴とする請求項1から8いずれか一項記載のサーマルプリンタ。
【請求項10】
前記プラテンローラの全体が前記導電体からなることを特徴とする請求項9記載のサーマルプリンタ。
【請求項11】
前記プラテンローラは、前記プラテンローラの回転軸方向に沿って形成された前記導電体からなる領域を有することを特徴とする請求項9記載のサーマルプリンタ。
【請求項12】
前記プラテンローラは、前記プラテンローラの曲面方向に沿って形成された前記導電体からなる領域を有することを特徴とする請求項9記載のサーマルプリンタ。
【請求項13】
前記プラテンローラは、芯部と、前記芯部を覆いかつ前記プラテンローラの曲面を形成する外周部とを有し、
前記外周部は、前記導電体からなることを特徴とする請求項9,11及び12いずれか一項記載のサーマルプリンタ。
【請求項14】
前記外周部は、前記プラテンローラの回転軸方向において偏肉して形成されていることを特徴とする請求項13記載のサーマルプリンタ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−139903(P2012−139903A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−293897(P2010−293897)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(501398606)富士通コンポーネント株式会社 (848)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(501398606)富士通コンポーネント株式会社 (848)
【Fターム(参考)】
[ Back to top ]