
シフトフィーリング評価装置
【課題】耐久性が向上するシフトフィーリング評価装置を提供する。
【解決手段】シフトレバー11のシフト操作に応じて摺動しセレクト操作に応じて回動するシフトロッド30と、ストローク部61と、ストロークセンサ本体62と、を備えるストロークセンサ60と、を具備し、前記ストローク部61は、前記シフトロッド30にシフト動作伝達板40を介して接続され、前記シフトロッド30の摺動に追従して摺動し、前記シフトロッド30の回動に追従して回動し、前記ストロークセンサ本体62は、前記シフトロッド30にセレクト動作伝達板50を介して接続され、前記シフトロッド30の回動に追従して回動し、前記シフト動作伝達板40は、下ブラケット42と、該下ブラケット42に対し支点43を中心として回動可能なストロ―ク支持部44と、を含み、前記セレクト動作伝達板50は、前記シフトロッド30を摺動自在に支持する。
【解決手段】シフトレバー11のシフト操作に応じて摺動しセレクト操作に応じて回動するシフトロッド30と、ストローク部61と、ストロークセンサ本体62と、を備えるストロークセンサ60と、を具備し、前記ストローク部61は、前記シフトロッド30にシフト動作伝達板40を介して接続され、前記シフトロッド30の摺動に追従して摺動し、前記シフトロッド30の回動に追従して回動し、前記ストロークセンサ本体62は、前記シフトロッド30にセレクト動作伝達板50を介して接続され、前記シフトロッド30の回動に追従して回動し、前記シフト動作伝達板40は、下ブラケット42と、該下ブラケット42に対し支点43を中心として回動可能なストロ―ク支持部44と、を含み、前記セレクト動作伝達板50は、前記シフトロッド30を摺動自在に支持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シフトフィーリング評価装置の技術であって、特にその構造技術に関する。
【背景技術】
【0002】
マニュアルトランスミッションのシフトフィーリングの評価を行うシフトフィーリング評価装置は公知である。特許文献1は、シフトレバーの回動に応じて摺動するシフトロッドの摺動量(ストローク量)をストロークセンサによって検出し、マニュアルトランスミッションに着脱可能に係合する係合部材に作用する荷重をロードセルによって検出し、シフトフィーリングを良否判定するシフトフィーリング評価装置を開示している。
【0003】
シフトフィーリング評価装置は、シフト操作のシフトフィーリングを定量評価する装置であって、セレクト操作自体の評価は行われない。
しかし、実際にマニュアルトランスミッションのシフト操作が行われる過程においては、併せてセレクト操作も行われる。シフトフィーリング評価装置において、セレクト操作が行われた場合には、特許文献1に開示されたシフトフィーリング評価装置の構成では、ストロークセンサ本体の内部にセレクト操作による負担がかかり、シフトフィーリング評価装置が短期間で破損する場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010―8393号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、耐久性が向上するシフトフィーリング評価装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0007】
即ち、請求項1においては、所定方向へのシフト操作および前記シフト操作とは異なる方向へのセレクト操作が行われるシフトレバーと、前記シフトレバーの一端に接続され、前記シフトレバーのシフト操作に応じて摺動し、前記シフトレバーのセレクト操作に応じて回動するシフトロッドと、本体部と、前記本体部に対して摺動するストローク部と、を備え、前記ストローク部の本体部に対する摺動量を検出するストロークセンサと、検査対象たるマニュアルトランスミッションに着脱可能に係合する係合ロッドと、前記係合ロッドに作用する荷重を検出するロードセルと、前記シフトロッドと前記係合ロッドとを接続するシフトケーブルと、を具備し、前記ストローク部は、前記シフトロッドにシフト動作伝達板を介して接続され、前記シフトロッドの摺動に追従して摺動し、前記シフトロッドの回動に追従して回動し、前記本体部は、前記シフトロッドにセレクト動作伝達板を介して接続され、前記シフトロッドの回動に追従して回動し、前記シフト動作伝達板は、シフトロッド支持部と、前記ストローク部を支持するとともに、前記シフトロッド支持部に対して回動可能に支持されるストロ―ク支持部と、を含み、前記セレクト動作伝達板は、前記シフトロッドを摺動自在に支持するものである。
【0008】
請求項2においては、請求項1に記載のシフトフィーリング評価装置であって、前記ストロークセンサにより検出されたシフトロッドの摺動量、並びに、前記ロードセルにより検出された前記係合ロッドに作用する荷重、に基づいて前記マニュアルトランスミッションのシフトフィーリングを良否判定するものである。
【発明の効果】
【0009】
本発明のシフトフィーリング評価装置によれば、耐久性が向上する効果を奏する。
【図面の簡単な説明】
【0010】
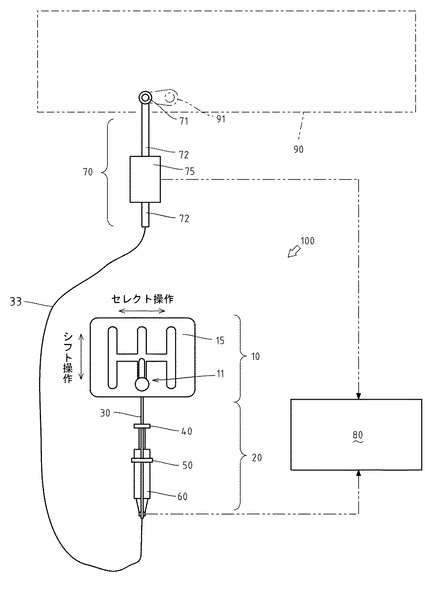
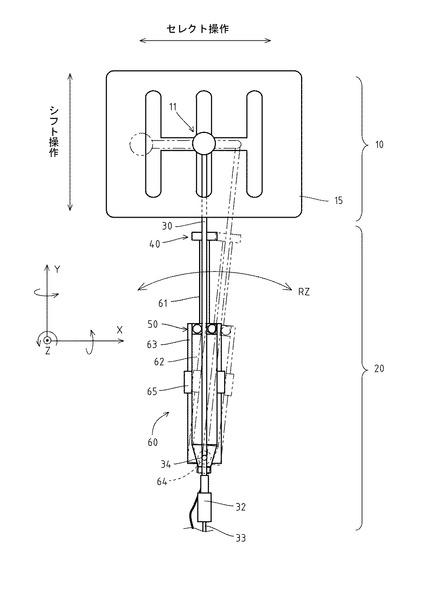
【図1】本発明の一実施形態に係るシフトフィーリング評価装置の全体的な構成を示した構成図。
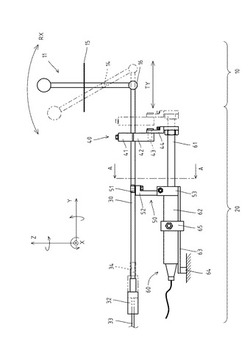
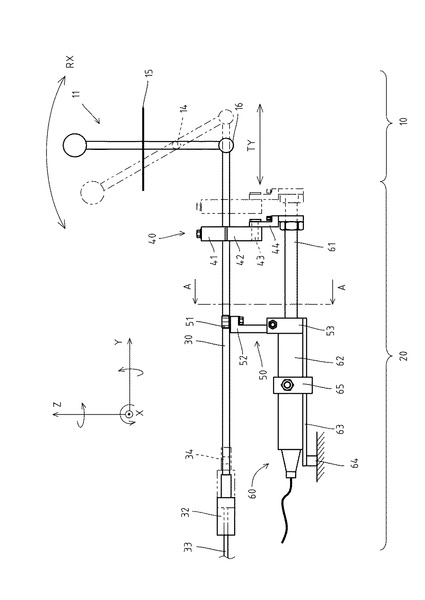
【図2】同じくストローク部を示した側面図。
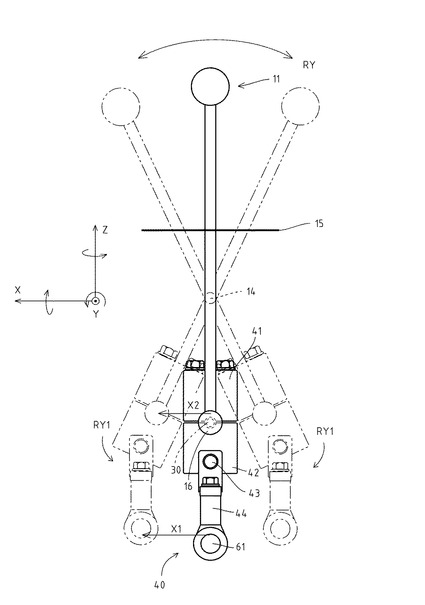
【図3】同じくストローク部を示した正面図。
【図4】同じくストローク部を示した平面図。
【図5】図2のAA方向から見た正面図。
【発明を実施するための形態】
【0011】
次に、発明の実施の形態を説明する。図1は本発明の一実施形態に係るシフトフィーリング評価装置の全体的な構成を示した構成図、図2は同じくストローク部を示した側面図、図3は同じくストローク部を示した正面図である。図4は同じくストローク部を示した平面図、図5は図2のAA方向から見た正面図である。
【0012】
図1を用いて、シフトフィーリング評価装置100について説明する。
本実施形態のシフトフィーリング評価装置100は、車両に搭載されるマニュアルトランスミッション90のシフトフィーリングを定量評価する(マニュアルトランスミッションを検査する)装置である。シフトフィーリングの評価は、シフトレバー11をシフト方向に操作したときに、シフト操作を評価することである。
【0013】
シフトフィーリング評価装置100は、シフトレバー部10と、ストローク検出部20と、ロード検出部70と、Electric Control Unit(以下ECU)80と、を具備している。
【0014】
シフトレバー部10は、車両に搭載されるシフトレバー装置と同様の構成とされ、シフトレバー11は、ガイド板15の案内に従い、シフト操作およびセレクト操作が行われるように構成されている。なお、シフトレバー11について詳しくは後述する。
【0015】
ストローク検出部20は、シフトレバー11のシフト操作によって摺動するシフトロッド30と、シフト操作伝達板40と、セレクト操作伝達板50と、ストロークセンサ60と、を具備し、シフトロッド30の摺動量(ストローク量)をストロークセンサ60によって検出するように構成されている。なお、ストローク検出部20については詳しくは後述する。
【0016】
ロード検出部70は、マニュアルトランスミッション90のアウターレバー91に着脱可能かつ回動可能に係合する係合部71と、シフトロッド30の摺動に応じて移動する係合ロッド72と、係合ロッド72の中間部に固定されるロードセル75と、を具備し、ロードセル75によって係合ロッド72の長手方向に作用する荷重を検出するように構成されている。
【0017】
シフトケーブル33は、係合ロッド72の一端とシフトロッド30の一端に接続され、シフトロッド30の摺動を係合ロッド72に伝達する構成とされている。
【0018】
マニュアルトランスミッション90は、乗用車に搭載される手動変速機であって、アウターレバー91を具備している。アウターレバー91の他端はフォーク等に回動可能に接続されている。マニュアルトランスミッション90は、アウターレバー91を回動することによって、変速される。
【0019】
ECU80は、ストロークセンサ60と、ロードセル75と、に接続され、ストロークセンサ60により検出されるシフトロッド30の摺動量、並びに、ロードセル75により検出される係合ロッド72に作用する荷重に基づいてマニュアルトランスミッション90のシフトフィーリングを良否判定する機能を有している。
【0020】
図2乃至図5を用いて、シフトレバー部10およびストローク検出部20について説明する。
なお、図2乃至図5において、並進方向については、シフトレバー11のシフト操作の方向をY軸方向とし、シフトレバー11のセレクト操作の方向をX軸方向とし、シフト操作の方向およびセレクト操作の方向に直交する鉛直方向をZ軸方向として定義する。また、回転方向については、X軸を中心とする回転方向をX軸回り方向とし、Y軸を中心とする回転方向をY軸回り方向とし、Z軸を中心とする回転方向をZ軸回り方向として定義する。
【0021】
シフトレバー部10は、シフトレバー11と、ガイド板15と、を具備し、シフトレバー11は、支点14と、シフトエンド16と、を具備している。
【0022】
ここで、シフトレバー11について説明する。
図2に示すように、シフトレバー11は、シフト操作が行われることで、シフトレバー11の途中部に位置する支点14を中心としてX軸回り方向に回動(図2の矢印RX)するように構成されている。シフトレバー11の下端にはシフトエンド16が配置されている。なお、シフトレバー11は、ガイド板15によってX軸回り方向の回動が所定範囲に規制される。そのため、シフトレバー11のX軸回り方向の回動によるシフトエンド16のX軸回り方向の回動は、Y軸方向の摺動(図2の矢印TY)と近似できる。
【0023】
図3および図4に示すように、シフトレバー11は、セレクト操作が行われることで、支点14を中心にY軸回り方向に回動(図3の矢印RY)するように構成されている。なお、シフトレバー11は、ガイド板15によってY軸回り方向の回動が所定範囲に規制される。そのため、シフトレバー11のY軸回り方向の回動によるシフトエンド16のY軸回り方向の回動は、後述するシフトロッド30の支点34を中心とするZ軸回り方向の回動(図4の矢印RZ)として近似できる。
【0024】
ストローク検出部20は、シフトロッド30と、シフト操作伝達板40と、セレクト操作伝達板50と、ストロークセンサ60と、を具備している。なお、シフト操作伝達板40と、セレクト操作伝達板50と、については詳しくは後述する。
【0025】
ここで、シフトロッド30について説明する。
シフトロッド30の一端は、シフトレバー11下端のシフトエンド16に接続されている。シフトロッド30は、シフトエンド16に対してX軸回り方向およびY軸回り方向へ回動可能に接続されている。一方、シフトロッド30の他端は、ソケット32を介して、シフトケーブル33に接続されている。また、シフトロッド30は支点34を中心としてZ軸回りの方向に回動可能な構成とされている。
【0026】
図2に示すように、シフトレバー11のシフト操作が行われると、シフトレバー11はX軸回り方向に回動するが、シフトエンド16のX軸回り方向の回動はY軸方向の摺動と近似されるため、シフトエンド16およびシフトロッド30はY軸方向に摺動することとなる。このシフトロッド30のY軸方向の摺動はシフトケーブル33に伝達される。
【0027】
図3および図4に示すように、シフトレバー11のセレクト操作が行われると、シフトレバー11はY軸回り方向に回動するが、シフトエンド16のY軸回り方向の回動はZ軸回りの方向の回動と近似されるため、シフトロッド30は支点34を中心としてZ軸回り方向に回動することとなる。なお、セレクト操作によるシフトロッド30の挙動は、シフトレバー11の支点14を中心とするY軸回り方向の回動としても表現でき、かつ、シフトロッドの支点34を中心とするZ軸回り方向の回動としても表現できるが、正面側からの挙動を分かりやすく説明するため、以下では、シフトレバー11の支点14を中心とするY軸回り方向の回動と定義する。
【0028】
ストロークセンサ60は、ストローク部61と、本体部としてのストロークセンサ本体62と、保持板63と、保持板支持部65と、を具備し、ストロークセンサ本体62に対するストローク部61のストローク量を検出するセンサーである。ストローク部61は、シフト操作伝達板40を介して、シフトロッド30に接続されている。一方、ストロークセンサ本体62は、セレクト操作伝達板50を介して、シフトロッド30に接続されている。また、ストロークセンサ本体62は、保持板支持部65によって保持板63に固定され、ストロークセンサ60および保持板63は、支点64を中心としてZ軸回りに回動可能に構成されている。
【0029】
なお、シフトレバー11のシフト操作は、ストロークセンサ60におけるストローク部61のストロークセンサ本体62に対する進退方向へ、シフトエンド16を摺動(回動)させる操作である。また、シフトレバー11のセレクト操作は、ストロークセンサ60におけるストローク部61のストロークセンサ本体62に対する進退方向と直交する方向へ、シフトエンド16を摺動(回動)させる操作である。
【0030】
ここで、シフト操作伝達板40について説明する。
図3に示すように、シフト操作伝達板40は、シフトロッド支持部としての上ブラケット41および下ブラケット42と、ストローク支持部44と、を具備している。ストローク支持部44は、下ブラケット42に対して支点43を中心としてY軸回り方向に回動可能に構成されている。
【0031】
上ブラケット41および下ブラケット42は、シフトロッド30を挟持して固定し、シフトロッド30のシフト操作伝達板40に対するY軸方向およびY軸回り方向の相対位置を固定している。そのため、シフト操作伝達板40は、シフトロッド30のY軸方向の摺動、並びに、シフトレバー11の支点14を中心とするY軸回り方向の回動、に追従して移動および回動する。
【0032】
ストローク支持部44は、支点43で下ブラケット42に支持されている。ストローク支持部44は、ストロークセンサ60のストローク部61の先端を支持し、ストローク部61のシフト操作伝達板40に対するY軸方向およびY軸回り方向の相対位置を固定している。そのため、ストロークセンサ60のストローク部61は、シフト操作伝達板40のY軸方向の摺動、並びに、シフトレバー11の支点14を中心とするY軸回り方向の回動、に追従して移動および回動する。
【0033】
シフトレバー11を、支点14を中心とするY軸回り方向へ回動操作したときには、ストローク支持部44が下ブラケット42に対して支点43を中心としてY軸回り方向に回動可能に構成されているため、ストローク支持部44およびストローク部61は、ストローク部61の慣性力によって、シフトロッド30のY軸回り方向の回動に逆らう向きに回動(図3の矢印RY1)する。このとき、ストローク部61の先端部のX軸方向の移動変位X1(図3参照)は、シフトロッド30すなわちシフトエンド16のX軸方向の移動変位X2(図3参照)と略同一となる。
【0034】
図2乃至図5を用いて、セレクト操作伝達板50について説明する。
セレクト操作伝達板50は、シフトロッド30を支持するシフトロッド支持部52と、シフトロッド支持部52の下方に接続される本体支持部53と、シフトロッド支持部52上で回動可能に設けられるボール51・51と、を具備している。
【0035】
シフトロッド支持部52上のボール51・51は、シフトロッド30を挟持して固定し、シフトロッド30のシフトロッド支持部52に対するY軸回り方向の相対位置を固定している。一方、ボール51・51はシフトロッド30にY軸方向への力がかかると回動し、シフトロッド30がボール51・51に対してY軸方向へ摺動可能となっている。つまり、ボール51・51はシフトロッド30にかかるY軸方向への力により回動可能に構成されており、シフトロッド30は、シフトロッド支持部52に対してY軸方向へ摺動自在に支持されている。
そのため、セレクト操作伝達板50は、シフトレバー11の支点14を中心とするY軸回り方向の回動動作に伴うシフトロッド30のY軸回り方向の回動に追従し、シフトロッド30のY軸方向の摺動には追従しない。
【0036】
本体支持部53は、ストロークセンサ本体62を支持し、ストロークセンサ本体62の本体支持部53に対するY軸回り方向およびY軸方向の相対位置を固定している。
そのため、ストロークセンサ60のストロークセンサ本体62は、セレクト操作伝達板50のY軸回り方向の回動に追従して移動および回動するものの、シフトロッド30のY軸方向の摺動には追従しない。
【0037】
このような構成とすることで、シフトフィーリング評価装置100は、以下の作用が得られる。
すなわち、シフト操作が行なわれれば、シフトレバー11のX軸回り方向の回動によって、シフトエンド16はX軸回り方向に回動されるが、このシフトエンド16のX軸回り方向への回動はY軸方向の摺動と近似される。そして、シフトエンド16のY軸方向の摺動によって、シフトロッド30はY軸方向に摺動する。
ここで、シフトロッド30のY軸方向の摺動は、シフト操作伝達板40を介してストローク部61に伝達され、ストローク部61はY軸方向に摺動する。
一方、シフトロッド30のY軸方向の摺動は、セレクト操作伝達板50を介してストロークセンサ本体62に伝達されず、ストロークセンサ本体62はY軸方向に摺動せず、保持板63によってY軸方向を固定されたままとなる。
【0038】
このようにして、シフト操作が行われれば、シフトロッド30のY軸方向の摺動量(ストローク量)は、ストロークセンサ本体62に対するストローク部61のY軸方向の摺動量としてストロークセンサ60によって検出される。
【0039】
また、セレクト操作が行われれば、シフトレバー11のY軸回り方向の回動によって、シフトエンド16およびシフトロッド30はY軸回り方向に回動する。
ここで、シフトロッド30のY軸回り方向の回動は、シフト操作伝達板40を介してストローク部61に伝達され、ストローク部61は支点64を中心としてZ軸回り方向に回動する。
一方、シフトロッド30のY軸回り方向の回動は、セレクト操作伝達板50を介してストロークセンサ本体62に伝達され、ストロークセンサ本体62は支点64を中心としてZ軸回り方向に回動する。
【0040】
このようにして、セレクト操作が行われれば、シフトロッド30のY軸回り方向の回動に対し、ストローク部61およびストロークセンサ本体62が追従して支点64を中心としてZ軸回り方向に回動する。
【0041】
このようにして、以下の効果が得られる。
シフトフィーリング評価装置は、シフト操作のシフトフィーリングを定量評価する装置であって、セレクト操作自体の評価は行われないが、シフトレバー11をシフト操作する過程においてセレクト操作も行われる。
従来、シフトフィーリング評価装置は、シフトロッドとストロークセンサとは、本実施形態のシフト操作伝達板のみによって接続されていた。そのため、セレクト操作が行われた場合には、ストロークセンサ本体の内部にセレクト操作によるZ軸回り方向の負担がかかり、シフトフィーリング評価装置が短期間で破損する場合があった。
【0042】
そこで、本実施形態のシフトフィーリング評価装置100のように、シフトロッド30とストロークセンサ60との接続にセレクト操作伝達板50をさらに設け、シフト操作伝達板40に支点43を設ける構成とすることで、ストローク部61とストロークセンサ本体62とがセレクト操作によるZ軸回り方向に一体的に回動することができる。
このようにして、ストローク部61によってストロークセンサ本体62にセレクト操作によるZ軸回り方向の負担がかからず、シフトフィーリング評価装置100の耐久性を向上できる。
【0043】
このような構成とすることで、シフトフィーリング評価装置100は、ストロークセンサ60により検出されたシフトロッド30の摺動量、並びに、ロードセル75により検出された係合ロッド72に作用する荷重、に基づいてマニュアルトランスミッション90のシフトフィーリングを良否判定する。
【0044】
このようにして、耐久性を向上したシフトフィーリング評価装置100によって、シフトフィーリングを良否判定することができる。
【符号の説明】
【0045】
10 シフト部
11 シフトレバー
30 シフトロッド
40 シフト操作伝達板
44 ストローク支持部
50 セレクト操作伝達板
51 ボール
60 ストロークセンサ
61 ストローク部
62 ストロークセンサ本体
80 Electric Control Unit(ECU)
90 マニュアルトランスミッション
【技術分野】
【0001】
本発明は、シフトフィーリング評価装置の技術であって、特にその構造技術に関する。
【背景技術】
【0002】
マニュアルトランスミッションのシフトフィーリングの評価を行うシフトフィーリング評価装置は公知である。特許文献1は、シフトレバーの回動に応じて摺動するシフトロッドの摺動量(ストローク量)をストロークセンサによって検出し、マニュアルトランスミッションに着脱可能に係合する係合部材に作用する荷重をロードセルによって検出し、シフトフィーリングを良否判定するシフトフィーリング評価装置を開示している。
【0003】
シフトフィーリング評価装置は、シフト操作のシフトフィーリングを定量評価する装置であって、セレクト操作自体の評価は行われない。
しかし、実際にマニュアルトランスミッションのシフト操作が行われる過程においては、併せてセレクト操作も行われる。シフトフィーリング評価装置において、セレクト操作が行われた場合には、特許文献1に開示されたシフトフィーリング評価装置の構成では、ストロークセンサ本体の内部にセレクト操作による負担がかかり、シフトフィーリング評価装置が短期間で破損する場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010―8393号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の課題は、耐久性が向上するシフトフィーリング評価装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0007】
即ち、請求項1においては、所定方向へのシフト操作および前記シフト操作とは異なる方向へのセレクト操作が行われるシフトレバーと、前記シフトレバーの一端に接続され、前記シフトレバーのシフト操作に応じて摺動し、前記シフトレバーのセレクト操作に応じて回動するシフトロッドと、本体部と、前記本体部に対して摺動するストローク部と、を備え、前記ストローク部の本体部に対する摺動量を検出するストロークセンサと、検査対象たるマニュアルトランスミッションに着脱可能に係合する係合ロッドと、前記係合ロッドに作用する荷重を検出するロードセルと、前記シフトロッドと前記係合ロッドとを接続するシフトケーブルと、を具備し、前記ストローク部は、前記シフトロッドにシフト動作伝達板を介して接続され、前記シフトロッドの摺動に追従して摺動し、前記シフトロッドの回動に追従して回動し、前記本体部は、前記シフトロッドにセレクト動作伝達板を介して接続され、前記シフトロッドの回動に追従して回動し、前記シフト動作伝達板は、シフトロッド支持部と、前記ストローク部を支持するとともに、前記シフトロッド支持部に対して回動可能に支持されるストロ―ク支持部と、を含み、前記セレクト動作伝達板は、前記シフトロッドを摺動自在に支持するものである。
【0008】
請求項2においては、請求項1に記載のシフトフィーリング評価装置であって、前記ストロークセンサにより検出されたシフトロッドの摺動量、並びに、前記ロードセルにより検出された前記係合ロッドに作用する荷重、に基づいて前記マニュアルトランスミッションのシフトフィーリングを良否判定するものである。
【発明の効果】
【0009】
本発明のシフトフィーリング評価装置によれば、耐久性が向上する効果を奏する。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態に係るシフトフィーリング評価装置の全体的な構成を示した構成図。
【図2】同じくストローク部を示した側面図。
【図3】同じくストローク部を示した正面図。
【図4】同じくストローク部を示した平面図。
【図5】図2のAA方向から見た正面図。
【発明を実施するための形態】
【0011】
次に、発明の実施の形態を説明する。図1は本発明の一実施形態に係るシフトフィーリング評価装置の全体的な構成を示した構成図、図2は同じくストローク部を示した側面図、図3は同じくストローク部を示した正面図である。図4は同じくストローク部を示した平面図、図5は図2のAA方向から見た正面図である。
【0012】
図1を用いて、シフトフィーリング評価装置100について説明する。
本実施形態のシフトフィーリング評価装置100は、車両に搭載されるマニュアルトランスミッション90のシフトフィーリングを定量評価する(マニュアルトランスミッションを検査する)装置である。シフトフィーリングの評価は、シフトレバー11をシフト方向に操作したときに、シフト操作を評価することである。
【0013】
シフトフィーリング評価装置100は、シフトレバー部10と、ストローク検出部20と、ロード検出部70と、Electric Control Unit(以下ECU)80と、を具備している。
【0014】
シフトレバー部10は、車両に搭載されるシフトレバー装置と同様の構成とされ、シフトレバー11は、ガイド板15の案内に従い、シフト操作およびセレクト操作が行われるように構成されている。なお、シフトレバー11について詳しくは後述する。
【0015】
ストローク検出部20は、シフトレバー11のシフト操作によって摺動するシフトロッド30と、シフト操作伝達板40と、セレクト操作伝達板50と、ストロークセンサ60と、を具備し、シフトロッド30の摺動量(ストローク量)をストロークセンサ60によって検出するように構成されている。なお、ストローク検出部20については詳しくは後述する。
【0016】
ロード検出部70は、マニュアルトランスミッション90のアウターレバー91に着脱可能かつ回動可能に係合する係合部71と、シフトロッド30の摺動に応じて移動する係合ロッド72と、係合ロッド72の中間部に固定されるロードセル75と、を具備し、ロードセル75によって係合ロッド72の長手方向に作用する荷重を検出するように構成されている。
【0017】
シフトケーブル33は、係合ロッド72の一端とシフトロッド30の一端に接続され、シフトロッド30の摺動を係合ロッド72に伝達する構成とされている。
【0018】
マニュアルトランスミッション90は、乗用車に搭載される手動変速機であって、アウターレバー91を具備している。アウターレバー91の他端はフォーク等に回動可能に接続されている。マニュアルトランスミッション90は、アウターレバー91を回動することによって、変速される。
【0019】
ECU80は、ストロークセンサ60と、ロードセル75と、に接続され、ストロークセンサ60により検出されるシフトロッド30の摺動量、並びに、ロードセル75により検出される係合ロッド72に作用する荷重に基づいてマニュアルトランスミッション90のシフトフィーリングを良否判定する機能を有している。
【0020】
図2乃至図5を用いて、シフトレバー部10およびストローク検出部20について説明する。
なお、図2乃至図5において、並進方向については、シフトレバー11のシフト操作の方向をY軸方向とし、シフトレバー11のセレクト操作の方向をX軸方向とし、シフト操作の方向およびセレクト操作の方向に直交する鉛直方向をZ軸方向として定義する。また、回転方向については、X軸を中心とする回転方向をX軸回り方向とし、Y軸を中心とする回転方向をY軸回り方向とし、Z軸を中心とする回転方向をZ軸回り方向として定義する。
【0021】
シフトレバー部10は、シフトレバー11と、ガイド板15と、を具備し、シフトレバー11は、支点14と、シフトエンド16と、を具備している。
【0022】
ここで、シフトレバー11について説明する。
図2に示すように、シフトレバー11は、シフト操作が行われることで、シフトレバー11の途中部に位置する支点14を中心としてX軸回り方向に回動(図2の矢印RX)するように構成されている。シフトレバー11の下端にはシフトエンド16が配置されている。なお、シフトレバー11は、ガイド板15によってX軸回り方向の回動が所定範囲に規制される。そのため、シフトレバー11のX軸回り方向の回動によるシフトエンド16のX軸回り方向の回動は、Y軸方向の摺動(図2の矢印TY)と近似できる。
【0023】
図3および図4に示すように、シフトレバー11は、セレクト操作が行われることで、支点14を中心にY軸回り方向に回動(図3の矢印RY)するように構成されている。なお、シフトレバー11は、ガイド板15によってY軸回り方向の回動が所定範囲に規制される。そのため、シフトレバー11のY軸回り方向の回動によるシフトエンド16のY軸回り方向の回動は、後述するシフトロッド30の支点34を中心とするZ軸回り方向の回動(図4の矢印RZ)として近似できる。
【0024】
ストローク検出部20は、シフトロッド30と、シフト操作伝達板40と、セレクト操作伝達板50と、ストロークセンサ60と、を具備している。なお、シフト操作伝達板40と、セレクト操作伝達板50と、については詳しくは後述する。
【0025】
ここで、シフトロッド30について説明する。
シフトロッド30の一端は、シフトレバー11下端のシフトエンド16に接続されている。シフトロッド30は、シフトエンド16に対してX軸回り方向およびY軸回り方向へ回動可能に接続されている。一方、シフトロッド30の他端は、ソケット32を介して、シフトケーブル33に接続されている。また、シフトロッド30は支点34を中心としてZ軸回りの方向に回動可能な構成とされている。
【0026】
図2に示すように、シフトレバー11のシフト操作が行われると、シフトレバー11はX軸回り方向に回動するが、シフトエンド16のX軸回り方向の回動はY軸方向の摺動と近似されるため、シフトエンド16およびシフトロッド30はY軸方向に摺動することとなる。このシフトロッド30のY軸方向の摺動はシフトケーブル33に伝達される。
【0027】
図3および図4に示すように、シフトレバー11のセレクト操作が行われると、シフトレバー11はY軸回り方向に回動するが、シフトエンド16のY軸回り方向の回動はZ軸回りの方向の回動と近似されるため、シフトロッド30は支点34を中心としてZ軸回り方向に回動することとなる。なお、セレクト操作によるシフトロッド30の挙動は、シフトレバー11の支点14を中心とするY軸回り方向の回動としても表現でき、かつ、シフトロッドの支点34を中心とするZ軸回り方向の回動としても表現できるが、正面側からの挙動を分かりやすく説明するため、以下では、シフトレバー11の支点14を中心とするY軸回り方向の回動と定義する。
【0028】
ストロークセンサ60は、ストローク部61と、本体部としてのストロークセンサ本体62と、保持板63と、保持板支持部65と、を具備し、ストロークセンサ本体62に対するストローク部61のストローク量を検出するセンサーである。ストローク部61は、シフト操作伝達板40を介して、シフトロッド30に接続されている。一方、ストロークセンサ本体62は、セレクト操作伝達板50を介して、シフトロッド30に接続されている。また、ストロークセンサ本体62は、保持板支持部65によって保持板63に固定され、ストロークセンサ60および保持板63は、支点64を中心としてZ軸回りに回動可能に構成されている。
【0029】
なお、シフトレバー11のシフト操作は、ストロークセンサ60におけるストローク部61のストロークセンサ本体62に対する進退方向へ、シフトエンド16を摺動(回動)させる操作である。また、シフトレバー11のセレクト操作は、ストロークセンサ60におけるストローク部61のストロークセンサ本体62に対する進退方向と直交する方向へ、シフトエンド16を摺動(回動)させる操作である。
【0030】
ここで、シフト操作伝達板40について説明する。
図3に示すように、シフト操作伝達板40は、シフトロッド支持部としての上ブラケット41および下ブラケット42と、ストローク支持部44と、を具備している。ストローク支持部44は、下ブラケット42に対して支点43を中心としてY軸回り方向に回動可能に構成されている。
【0031】
上ブラケット41および下ブラケット42は、シフトロッド30を挟持して固定し、シフトロッド30のシフト操作伝達板40に対するY軸方向およびY軸回り方向の相対位置を固定している。そのため、シフト操作伝達板40は、シフトロッド30のY軸方向の摺動、並びに、シフトレバー11の支点14を中心とするY軸回り方向の回動、に追従して移動および回動する。
【0032】
ストローク支持部44は、支点43で下ブラケット42に支持されている。ストローク支持部44は、ストロークセンサ60のストローク部61の先端を支持し、ストローク部61のシフト操作伝達板40に対するY軸方向およびY軸回り方向の相対位置を固定している。そのため、ストロークセンサ60のストローク部61は、シフト操作伝達板40のY軸方向の摺動、並びに、シフトレバー11の支点14を中心とするY軸回り方向の回動、に追従して移動および回動する。
【0033】
シフトレバー11を、支点14を中心とするY軸回り方向へ回動操作したときには、ストローク支持部44が下ブラケット42に対して支点43を中心としてY軸回り方向に回動可能に構成されているため、ストローク支持部44およびストローク部61は、ストローク部61の慣性力によって、シフトロッド30のY軸回り方向の回動に逆らう向きに回動(図3の矢印RY1)する。このとき、ストローク部61の先端部のX軸方向の移動変位X1(図3参照)は、シフトロッド30すなわちシフトエンド16のX軸方向の移動変位X2(図3参照)と略同一となる。
【0034】
図2乃至図5を用いて、セレクト操作伝達板50について説明する。
セレクト操作伝達板50は、シフトロッド30を支持するシフトロッド支持部52と、シフトロッド支持部52の下方に接続される本体支持部53と、シフトロッド支持部52上で回動可能に設けられるボール51・51と、を具備している。
【0035】
シフトロッド支持部52上のボール51・51は、シフトロッド30を挟持して固定し、シフトロッド30のシフトロッド支持部52に対するY軸回り方向の相対位置を固定している。一方、ボール51・51はシフトロッド30にY軸方向への力がかかると回動し、シフトロッド30がボール51・51に対してY軸方向へ摺動可能となっている。つまり、ボール51・51はシフトロッド30にかかるY軸方向への力により回動可能に構成されており、シフトロッド30は、シフトロッド支持部52に対してY軸方向へ摺動自在に支持されている。
そのため、セレクト操作伝達板50は、シフトレバー11の支点14を中心とするY軸回り方向の回動動作に伴うシフトロッド30のY軸回り方向の回動に追従し、シフトロッド30のY軸方向の摺動には追従しない。
【0036】
本体支持部53は、ストロークセンサ本体62を支持し、ストロークセンサ本体62の本体支持部53に対するY軸回り方向およびY軸方向の相対位置を固定している。
そのため、ストロークセンサ60のストロークセンサ本体62は、セレクト操作伝達板50のY軸回り方向の回動に追従して移動および回動するものの、シフトロッド30のY軸方向の摺動には追従しない。
【0037】
このような構成とすることで、シフトフィーリング評価装置100は、以下の作用が得られる。
すなわち、シフト操作が行なわれれば、シフトレバー11のX軸回り方向の回動によって、シフトエンド16はX軸回り方向に回動されるが、このシフトエンド16のX軸回り方向への回動はY軸方向の摺動と近似される。そして、シフトエンド16のY軸方向の摺動によって、シフトロッド30はY軸方向に摺動する。
ここで、シフトロッド30のY軸方向の摺動は、シフト操作伝達板40を介してストローク部61に伝達され、ストローク部61はY軸方向に摺動する。
一方、シフトロッド30のY軸方向の摺動は、セレクト操作伝達板50を介してストロークセンサ本体62に伝達されず、ストロークセンサ本体62はY軸方向に摺動せず、保持板63によってY軸方向を固定されたままとなる。
【0038】
このようにして、シフト操作が行われれば、シフトロッド30のY軸方向の摺動量(ストローク量)は、ストロークセンサ本体62に対するストローク部61のY軸方向の摺動量としてストロークセンサ60によって検出される。
【0039】
また、セレクト操作が行われれば、シフトレバー11のY軸回り方向の回動によって、シフトエンド16およびシフトロッド30はY軸回り方向に回動する。
ここで、シフトロッド30のY軸回り方向の回動は、シフト操作伝達板40を介してストローク部61に伝達され、ストローク部61は支点64を中心としてZ軸回り方向に回動する。
一方、シフトロッド30のY軸回り方向の回動は、セレクト操作伝達板50を介してストロークセンサ本体62に伝達され、ストロークセンサ本体62は支点64を中心としてZ軸回り方向に回動する。
【0040】
このようにして、セレクト操作が行われれば、シフトロッド30のY軸回り方向の回動に対し、ストローク部61およびストロークセンサ本体62が追従して支点64を中心としてZ軸回り方向に回動する。
【0041】
このようにして、以下の効果が得られる。
シフトフィーリング評価装置は、シフト操作のシフトフィーリングを定量評価する装置であって、セレクト操作自体の評価は行われないが、シフトレバー11をシフト操作する過程においてセレクト操作も行われる。
従来、シフトフィーリング評価装置は、シフトロッドとストロークセンサとは、本実施形態のシフト操作伝達板のみによって接続されていた。そのため、セレクト操作が行われた場合には、ストロークセンサ本体の内部にセレクト操作によるZ軸回り方向の負担がかかり、シフトフィーリング評価装置が短期間で破損する場合があった。
【0042】
そこで、本実施形態のシフトフィーリング評価装置100のように、シフトロッド30とストロークセンサ60との接続にセレクト操作伝達板50をさらに設け、シフト操作伝達板40に支点43を設ける構成とすることで、ストローク部61とストロークセンサ本体62とがセレクト操作によるZ軸回り方向に一体的に回動することができる。
このようにして、ストローク部61によってストロークセンサ本体62にセレクト操作によるZ軸回り方向の負担がかからず、シフトフィーリング評価装置100の耐久性を向上できる。
【0043】
このような構成とすることで、シフトフィーリング評価装置100は、ストロークセンサ60により検出されたシフトロッド30の摺動量、並びに、ロードセル75により検出された係合ロッド72に作用する荷重、に基づいてマニュアルトランスミッション90のシフトフィーリングを良否判定する。
【0044】
このようにして、耐久性を向上したシフトフィーリング評価装置100によって、シフトフィーリングを良否判定することができる。
【符号の説明】
【0045】
10 シフト部
11 シフトレバー
30 シフトロッド
40 シフト操作伝達板
44 ストローク支持部
50 セレクト操作伝達板
51 ボール
60 ストロークセンサ
61 ストローク部
62 ストロークセンサ本体
80 Electric Control Unit(ECU)
90 マニュアルトランスミッション
【特許請求の範囲】
【請求項1】
所定方向へのシフト操作および前記シフト操作とは異なる方向へのセレクト操作が行われるシフトレバーと、
前記シフトレバーの一端に接続され、前記シフトレバーのシフト操作に応じて摺動し、前記シフトレバーのセレクト操作に応じて回動するシフトロッドと、
本体部と、前記本体部に対して摺動するストローク部と、を備え、前記ストローク部の本体部に対する摺動量を検出するストロークセンサと、
検査対象たるマニュアルトランスミッションに着脱可能に係合する係合ロッドと、
前記係合ロッドに作用する荷重を検出するロードセルと、
前記シフトロッドと前記係合ロッドとを接続するシフトケーブルと、
を具備し、
前記ストローク部は、前記シフトロッドにシフト動作伝達板を介して接続され、前記シフトロッドの摺動に追従して摺動し、前記シフトロッドの回動に追従して回動し、
前記本体部は、前記シフトロッドにセレクト動作伝達板を介して接続され、前記シフトロッドの回動に追従して回動し、
前記シフト動作伝達板は、シフトロッド支持部と、前記ストローク部を支持するとともに、前記シフトロッド支持部に対して回動可能に支持されるストロ―ク支持部と、を含み、
前記セレクト動作伝達板は、前記シフトロッドを摺動自在に支持する、
シフトフィーリング評価装置。
【請求項2】
請求項1に記載のシフトフィーリング評価装置であって、
前記ストロークセンサにより検出されたシフトロッドの摺動量、並びに、前記ロードセルにより検出された前記係合ロッドに作用する荷重、に基づいて前記マニュアルトランスミッションのシフトフィーリングを良否判定する、
シフトフィーリング評価装置。
【請求項1】
所定方向へのシフト操作および前記シフト操作とは異なる方向へのセレクト操作が行われるシフトレバーと、
前記シフトレバーの一端に接続され、前記シフトレバーのシフト操作に応じて摺動し、前記シフトレバーのセレクト操作に応じて回動するシフトロッドと、
本体部と、前記本体部に対して摺動するストローク部と、を備え、前記ストローク部の本体部に対する摺動量を検出するストロークセンサと、
検査対象たるマニュアルトランスミッションに着脱可能に係合する係合ロッドと、
前記係合ロッドに作用する荷重を検出するロードセルと、
前記シフトロッドと前記係合ロッドとを接続するシフトケーブルと、
を具備し、
前記ストローク部は、前記シフトロッドにシフト動作伝達板を介して接続され、前記シフトロッドの摺動に追従して摺動し、前記シフトロッドの回動に追従して回動し、
前記本体部は、前記シフトロッドにセレクト動作伝達板を介して接続され、前記シフトロッドの回動に追従して回動し、
前記シフト動作伝達板は、シフトロッド支持部と、前記ストローク部を支持するとともに、前記シフトロッド支持部に対して回動可能に支持されるストロ―ク支持部と、を含み、
前記セレクト動作伝達板は、前記シフトロッドを摺動自在に支持する、
シフトフィーリング評価装置。
【請求項2】
請求項1に記載のシフトフィーリング評価装置であって、
前記ストロークセンサにより検出されたシフトロッドの摺動量、並びに、前記ロードセルにより検出された前記係合ロッドに作用する荷重、に基づいて前記マニュアルトランスミッションのシフトフィーリングを良否判定する、
シフトフィーリング評価装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−196800(P2011−196800A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−63211(P2010−63211)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]