
シフトレバー装置
【課題】互いに直交する操作方向であるシフト方向の検出特性とセレクト方向の検出特性とが両立されたシフトレバー装置を提供すること。
【解決手段】シフト方向に操作された際にシフト軸20の回りを回動すると共に、セレクト方向に操作された際にセレクト軸の回りを回動するマグネット230と、マグネット230の磁気の作用方向を検出する磁気センサ11と、を有するシフトレバー装置1においては、シフト軸20及びセレクト軸よりも磁気センサ11がマグネット230側に近づけて配置され、軸からマグネット230までの距離L2に対する軸から磁気センサ11までの距離L1の比率であるセンサ位置比L1/L2が、シフト軸20とセレクト軸とで相違しており、シフト方向及びセレクト方向のうち操作ストロークが大きい操作方向に対応する軸に関するセンサ位置比が小さく設定されている。
【解決手段】シフト方向に操作された際にシフト軸20の回りを回動すると共に、セレクト方向に操作された際にセレクト軸の回りを回動するマグネット230と、マグネット230の磁気の作用方向を検出する磁気センサ11と、を有するシフトレバー装置1においては、シフト軸20及びセレクト軸よりも磁気センサ11がマグネット230側に近づけて配置され、軸からマグネット230までの距離L2に対する軸から磁気センサ11までの距離L1の比率であるセンサ位置比L1/L2が、シフト軸20とセレクト軸とで相違しており、シフト方向及びセレクト方向のうち操作ストロークが大きい操作方向に対応する軸に関するセンサ位置比が小さく設定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のシフトレンジを選択するために車載される装置であって、シフトレバーの操作に応じて電気信号を出力するシフトレバー装置に関する。
【背景技術】
【0002】
従来、車両のシフトレバー装置には、機械的なリンク機構を採用したシフトチェンジ手段が多く用いられてきた。近年、車載機器の電子化の要請に対応できるよう、シフトレバーの操作を電気的に検出するシフトレバー装置が提案されている。このシフトレバー装置は、検出したシフトレバーの操作を電気信号に変換して出力する。
【0003】
上記のようなシフトレバー装置は、その出力信号に応じてアクチュエータを駆動してシフトチェンジを実現する、いわゆるバイワイヤ式のシフトレバー装置と呼ばれている。バイワイヤ式のシフトレバー装置では、トランスミッションとの間に複雑なリンク機構を配設する必要がなく、電気配線を取り回しするだけで良い。このようなシフトレバー装置を採用すれば、車両におけるシフト操作機構の設計自由度や設置自由度等を格段に向上できる。
【0004】
バイワイヤ式のシフトレバー装置としては、シフトレバーの回動動作の中心軸を超えて反対側に延設され先端にマグネットを保持するガイドロッドと、そのマグネットに対面するように配置された磁気センサと、を備えた装置が提案されている(例えば、特許文献1参照。)。このシフトレバー装置では、互いに直交するシフト方向及びセレクト方向にシフトレバーが操作されたときのガイドロッドの変位を検知することで操作位置を検出している。
【0005】
しかしながら、前記従来のシフトレバー装置では、次のような問題がある。すなわち、シフト方向の検出手段及びセレクト方向の検出手段として、マグネットと磁気センサとを組み合せた検出手段が共用されているため、シフト方向及びセレクト方向の検出特性の双方を理想的に両立させることが難しく、ある程度の妥協が不可避になっているという問題がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−223384号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、前記従来の問題点に鑑みてなされたものであり、互いに直交するシフト方向及びセレクト方向に操作可能なバイワイヤ式のシフトレバー装置であって、シフト方向の検出特性とセレクト方向の検出特性とが両立されたシフトレバー装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明は、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバーを備え、前記シフト方向と前記セレクト方向との間で操作範囲に大小の差が設けられた車両用のシフトレバー装置であって、
前記シフトレバーの基部をなし、前記シフト方向の操作に応じて第1の仮想中心軸の回りを回動すると共に、前記セレクト方向の操作に応じて第2の仮想中心軸の回りを回動するレバーブロックと、
前記シフトレバーが前記シフト方向に操作された際に磁極方向が前記第1の仮想中心軸に向かう状態を維持しながら当該第1の仮想中心軸の回りを回動すると共に、前記シフトレバーが前記セレクト方向に操作された際に磁極方向が前記第2の仮想中心軸に向かう状態を維持しながら当該第2の仮想中心軸の回りを回動するように前記レバーブロックに保持されたマグネットと、
前記マグネットが発生する磁気の作用方向を検出する磁気センサと、
該磁気センサを保持する基台と、
前記第1の仮想中心軸をなすシフト軸を介して前記レバーブロックを支持すると共に、前記第2の仮想中心軸をなすセレクト軸を介して回動可能な状態で前記基台に支持された揺動台と、
前記磁気センサが検出した磁気の作用方向に応じて前記シフトレバーの操作位置に対応する信号を出力する信号出力部と、を備え、
前記第1及び第2の仮想中心軸よりも前記磁気センサが前記マグネット側に近づけて配置され、前記マグネットの磁極方向に前記磁気センサが位置するときには該磁気センサに対して磁極方向の磁気が作用する一方、それ以外では磁極方向を中心として外側に湾曲する磁気が前記磁気センサに作用し、これにより、前記磁気センサによる磁気の作用方向の検出角であるセンサ検出角が前記シフトレバーの操作角であるレバー角に対して増幅されるように構成されており、
前記仮想中心軸から前記マグネットまでの距離L2に対する前記仮想中心軸から前記磁気センサまでの距離L1の比率であるセンサ位置比L1/L2が、前記第1の仮想中心軸と前記第2の仮想中心軸とで相違し、前記シフト方向及び前記セレクト方向のうち前記操作範囲が大きい操作方向に対応する仮想中心軸に関する前記センサ位置比が小さく、前記操作範囲が小さい操作方向に対応する仮想中心軸に関する前記センサ位置比が大きく設定されているシフトレバー装置にある(請求項1)。
【0009】
本発明のシフトレバー装置が備えるマグネットは、その磁極方向が前記仮想中心軸に向かう状態を維持しながらその回りを回動するように配設されている。前記シフトレバーが操作されたときには、前記マグネットが前記磁気センサの外周側を回動し、前記磁気センサに対する磁気の作用方向が変化する。
【0010】
ここで、前記マグネットの周辺磁界では、前記磁極方向に沿って直線的に伸びる磁力線を中心とし、この中心の磁力線からずれた磁力線が外側に湾曲している。このような磁力線の湾曲は、中心の磁力線からのずれが大きくなればなるほど、その度合いが大きくなっている。本発明のシフトレバー装置では、前記仮想中心軸よりも前記マグネット側に近づけて前記磁気センサを配置することで上記のような磁力線の湾曲を有用に活用し、以下に説明するような検出特性を実現している。
【0011】
本発明のシフトレバー装置では、前記仮想中心軸と前記磁気センサとを結ぶ一直線上に前記マグネットが位置したとき(以下、基準位置という。)、湾曲することなく前記磁極方向に直線的に伸びる中心の磁力線が前記磁気センサに作用する。前記マグネットが回動して基準位置からずれると、中心の磁力線が前記仮想中心軸に向かう一方、前記磁気センサに対しては、中心からずれて湾曲する磁力線が作用するようになる。この湾曲した磁力線の作用方向の傾きは、前記マグネットの回動角を表す前記レバー角に略一致する中心の磁力線の作用方向の傾きよりも大きく増幅されている。
【0012】
本発明のシフトレバー装置では、前記レバー角が増幅された角度で傾く磁力線が前記磁気センサに作用することになる。そして、前記マグネットの回動位置が前記基準位置からずれるほど、前記中心の磁力線からずれて湾曲度合いが大きい磁力線が前記磁気センサに作用し、上記のような増幅の度合いが拡大することになる。このように、本発明では、前記磁気センサを前記マグネット側に近づけて配置したことで、前記レバー角の変化に応じた前記センサ検出角の変化量が拡大され増幅されている。そして、このようなセンサ検出角の変化量の増幅度合いは、前記マグネットに対して前記磁気センサが接近しているほど、すなわち前記センサ位置比が大きくなるほど顕著になってくる。
【0013】
そこで、本発明のシフトレバー装置では、前記シフト方向及び前記セレクト方向の操作範囲に応じて前記センサ位置比の大きさを変更している。すなわち、前記操作範囲が狭いほど前記センサ位置比を大きく設定して前記センサ検出角の増幅度合いを大きくし、小さなレバー角の変化を確実性高く検出しようとしている。一方、前記操作範囲が広いほど前記センサ位置比を小さく設定して前記センサ検出角の増幅度合いを抑制することで、大きなレバー角の変化に対応できるようにしている。
【0014】
このように本発明のシフトレバー装置は、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバー装置であって、前記センサ位置比の設定に応じてシフト方向の検出特性とセレクト方向の検出特性とを両立した装置である。
【0015】
本発明における仮想中心軸とは、前記シフト方向あるいは前記セレクト方向に前記シフトレバーが操作されたときの回動動作の中心をなす軸である。前記マグネットの磁極方向がこの仮想中心軸に向かっているとは、軸方向の長さに制限のない仮想中心軸に対して前記磁極方向が交わることを意味している。
本発明における前記シフト方向及び前記セレクト方向の操作範囲は、前記シフトレバーの操作ストロークの長さに関する範囲であっても良く、前記シフトレバーの操作角度に関する範囲であっても良い。
【0016】
本発明の好適な一態様のシフトレバー装置では、前記レバー角に対する前記センサ検出角の増幅率と、前記センサ位置比L1/L2と、の相関関係に基づき、
前記シフト方向の操作範囲と増幅率とを掛け合わせた値と、前記セレクト方向の操作範囲と増幅率とを掛け合わせた値と、の比率が0.8〜1.2の範囲に収まるように前記第1及び第2の仮想中心軸に関するセンサ位置比が設定されている(請求項2)。
前記シフト方向及び前記セレクト方向において、前記掛け合わせた値を1に近く設定しておけば、前記センサ検出角の変化量を同等にでき、前記シフト方向及び前記セレクト方向について似通った検出特性を実現できる。
【0017】
本発明の好適な一態様のシフトレバー装置では、前記シフト方向の操作範囲と前記セレクト方向の操作範囲との比率が1.5以上である(請求項3)。
前記比率が1.5以上であると、前記シフト方向の検出特性と前記セレクト方向の検出特性との差が大きくなるため、本発明の作用効果が特に有効になる。
【0018】
本発明の好適な一態様のシフトレバー装置においては、前記磁気センサは、磁気を検知する磁気検知部を有し、該磁気検知部が、前記マグネットの磁極面の内側に包含され得る大きさである(請求項4)。
仮に、前記仮想中心軸側の前記マグネットの磁極面よりも前記磁気検知部が大きい場合には、該磁気検知部内の位置の違いによって磁気の作用方向が大きくばらつくおそれが生じる。特に、本発明では、上記のごとく中心の磁力線からずれて湾曲した磁力線を積極的に活用しているため、上記のような磁気の作用方向のばらつきが一層顕著になるおそれがある。そこで、本発明では、前記磁気検知部の大きさを、前記マグネットの磁極面に包含され得る大きさ、すなわち磁極面よりも小さい大きさに設定してある。このように小さい磁気検知部であれば、磁気の作用方向のばらつきを抑制でき、高精度な検出が可能になる。
【0019】
本発明における好適な一態様のシフトレバー装置における磁気センサは、相互の直交する3方向の磁気成分を計測可能である。
この場合には、前記磁気検知部に対する磁気の作用方向を3次元的に検出できるようになる。磁気の作用方向を3次元的に検出できれば、前記シフト方向と前記セレクト方向とを組み合わせた前記シフトレバーの2次元的な操作を一層高精度に検出できるようになる。
【図面の簡単な説明】
【0020】
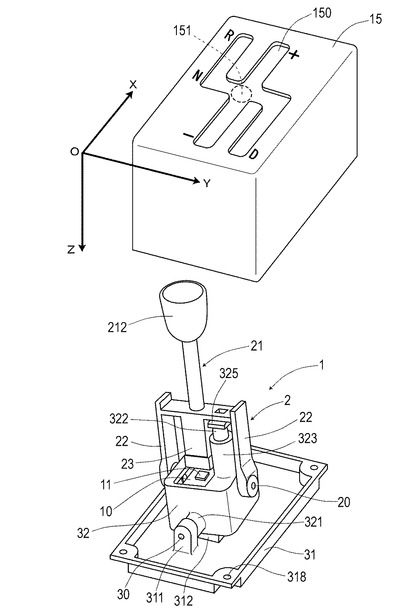
【図1】実施例における、シフトレバー装置を示す斜視図。
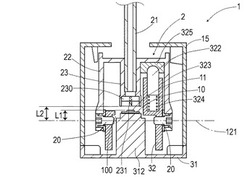
【図2】実施例における、シフトレバー装置の断面構造を示す断面図(シフト軸に沿う断面)。
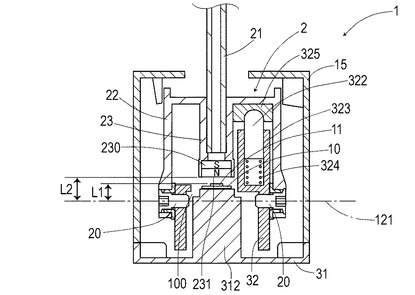
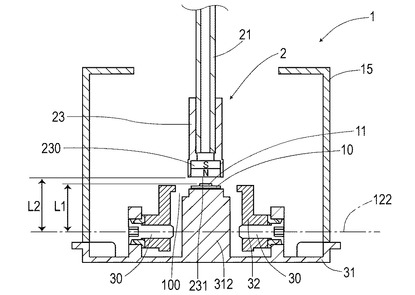
【図3】実施例における、シフトレバー装置の断面構造を示す断面図(セレクト軸に沿う断面)。
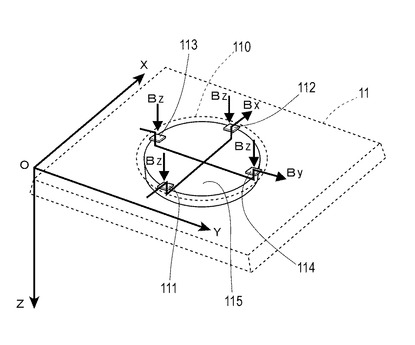
【図4】実施例における、磁気センサの検出原理を説明する説明図。
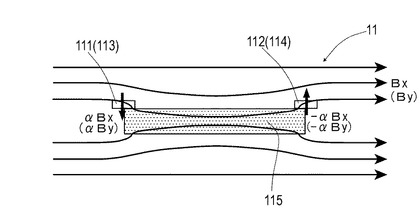
【図5】実施例における、X軸(Y軸)方向の磁気成分が磁気センサに作用する様子を示す説明図。
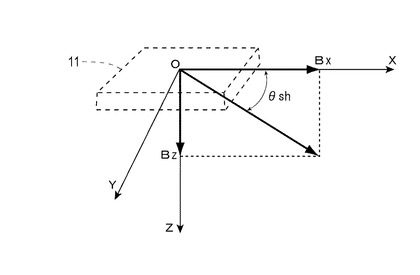
【図6】実施例における、XZ平面内のセンサ検出角θshを説明する説明図。
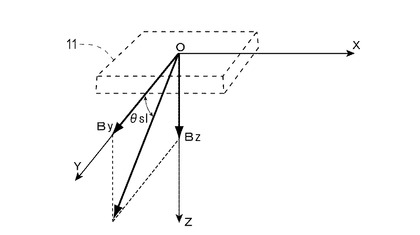
【図7】実施例における、YZ平面内のセンサ検出角θslを説明する説明図。
【図8】実施例における、磁気センサに作用する磁界を示す説明図。
【図9】実施例における、シフト方向に操作されたときのマグネットの回動位置を示す説明図(シフト軸に沿う断面図)。
【図10】実施例における、磁気センサに作用する磁界を示す説明図。
【図11】実施例における、磁気センサに作用する磁界を示す説明図。
【図12】実施例における、レバー角(マグネットの回動角)とセンサ検出角との関係を示すグラフ。
【図13】実施例における、センサ位置比と増幅率との関係を示すグラフ。
【発明を実施するための形態】
【0021】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例)
本例は、車両のシフトレンジを選択するために操作されるシフトレバー21を含むシフトレバー装置1に関する例である。この内容について、図1〜図13を用いて説明する。
【0022】
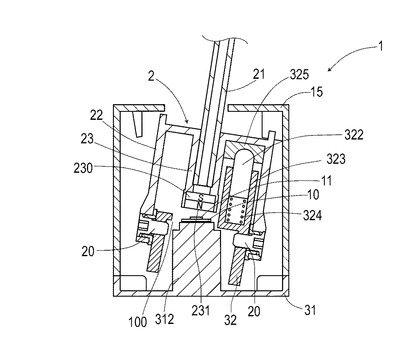
本例のシフトレバー装置1は、図1〜図3に示すごとく、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバー21を有し、シフト方向(X軸方向)とセレクト方向(Y軸方向)との間で操作ストローク(操作範囲)に大小の差が設けられた車両用のシフトレバー装置である。
このシフトレバー装置1は、シフトレバー21の基部をなすレバーブロック2と、レバーブロック2に保持されたマグネット230と、このマグネット230が発生する磁気の作用方向を検出する磁気センサ11と、この磁気センサ11を保持する基台31と、基台31に支持された揺動台32と、磁気センサ11が検出した磁気の作用方向に応じてシフトレバー21の操作位置に対応する信号を出力する信号出力部と、を備えている。
【0023】
レバーブロック2は、シフト方向の操作に応じて第1の仮想中心軸121の回りを回動すると共に、セレクト方向に操作に応じて第2の仮想中心軸122の回りを回動する。このレバーブロック2に保持されたマグネット230は、シフトレバー21がシフト方向に操作されたときに磁極方向が第1の仮想中心軸121に向かう状態を保ちつつその回りを回動し、セレクト方向に操作されたときに磁極方向が第2の仮想中心軸122に向かう状態を保ちつつその回りを回動する。揺動台32は、シフト方向及びセレクト方向の操作が可能となるよう、第1の仮想中心軸121をなすシフト軸20を介してレバーブロック2を支持すると共に、第2の仮想中心軸122をなすセレクト軸30を介して回動可能な状態で基台31に支持されている。
【0024】
このシフトレバー装置1では、仮想中心軸121・122よりも磁気センサ11がマグネット230側に近づけて配置されている。仮想中心軸121(122)からマグネット230までの距離L2に対する仮想中心軸121(122)から磁気センサ11までの距離L1の比率であるセンサ位置比L1/L2は、シフト方向及びセレクト方向のシフトレバー21の操作ストロークに応じて第1の仮想中心軸121と第2の仮想中心軸122とで相違している。
以下、この内容について、詳しく説明する。
【0025】
シフトレバー装置1は、図1に示すごとく、運転者がシフトレバー21を操作可能なように、車両の運転席と助手席との間のセンターコンソールや、運転者に対面するダッシュパネル等に設置される装置である。本例のシフトレバー装置1は、互いに略直交するシフト方向(X軸方向)及びセレクト方向(Y軸方向)にシフトレバー21を操作可能なゲート式のタイプである。シフト方向は、運転者から見て前後方向の操作方向であり、セレクト方向は、左右方向の操作方向である。本例のシフトレバー装置1では、シフト方向の操作ストロークがセレクト方向の操作ストロークよりも長く、約2倍に設定されている。
【0026】
シフトレバー装置1では、図1〜図3に示すごとく、シフトレバー21が固定されたレバーブロック2、シフト方向に回動可能な状態でレバーブロック2を軸支する揺動台32等が保護カバー15の内部に収容されている。揺動台32は、装置の底面をなす基台31によりセレクト方向に回動可能な状態で軸支されている。保護カバー15の上面には、シフトレバー21の移動経路をなすゲート150が設けられている。各シフト位置には、D、Rなどのシフトレンジを表す記号が表示されている。
【0027】
シフトレバー装置1では、シフト方向の操作列が3列設定されており、セレクト方向にシフトレバー21を操作することでシフト方向の操作列を切り換え可能である。本例のシフトレバー装置1では、ゲート150が十字に交差する中央位置がホームポジション151(Hポジション)になっている。シフトレバー21は、常時、Hポジション151に向けて付勢されている。
【0028】
例えば、Hポジション151に位置するシフトレバー21(図2及び図3参照。)を図1中の右側(セレクト方向)に操作した後に手前(シフト方向)に引くように操作すればDポジジョンに操作できDレンジを選択できる。その後、運転者がシフトレバー21から手を離すと、Dレンジが選択された状態が維持されたまま、シフトレバー21がHポジション151に復帰する。また、例えば、Dレンジが選択されているときに、Hポジション151のシフトレバー21を手前に引けば−ポジションに操作できギアを一段下げることができる。さらに、例えば、Dレンジが選択されているときに、Hポジション151のシフトレバー21を左側に倒してNポジションに操作すればNレンジを選択できる。一方、Hポジションに復帰させることなくNポジションからさらに奥側に押し込んでRポジションに操作すればRレンジを選択できる。なお、シフトレバー21のシフトパターンは、本例には限定されない。本例のシフトレバー装置1における操作位置の検出方法を採用すれば、前後左右あらゆる方向の操作に対応可能である。
【0029】
次に、シフトレバー装置1を構成する各部品を説明する。基台31は、図1〜図3に示すごとく、装置の底部をなしている。矩形状を呈する底面の中央部分には、高さ方向に突出する台座部312が設けられている。台座部312の上面には、磁気センサ11が実装されたセンサ基板10が固定されている。基台31の底面には、台座部312を介して相互に対面する一対の支持片311が立設されている。一対の支持片311には、それぞれ、セレクト軸30を貫通配置させるための軸孔が穿孔されている。4隅には、保護カバー15を取り付けるためのビス孔318が穿孔されている。
【0030】
揺動台32は、図1〜図3に示すごとく、断面略矩形環状の筒状を呈する部材である。互いに反対側に面する2組の側面のうち、基台31の支持片311に対面する1組の側面には、外側に突出する座部321がそれぞれ設けられている。座部321の端面は、支持片311の軸孔に貫通配置されたセレクト軸30が立設固定される面である。他方の1組の側面には、シフト軸20が立設されている。シフト軸20及びセレクト軸30は、揺動台32の筒方向において異なる位置に立設あるいは立設固定される。シフト軸20は、車両搭載時の高さ方向の上側に配置され、セレクト軸30は下側に配置されている。
【0031】
揺動台32の内側空間に当たるセンサ空間100を取り囲む4箇所の側壁部のうち、シフト軸20の一方が立設される側壁部は、他の3箇所の側壁部よりも肉厚に形成されている。その肉厚の側壁部の上面には、プランジャ322を進退可能な状態で保持する円筒状のピン保持部323が立設されている。プランジャ322は、ピン保持部323の内部に収容されたスプリング324の付勢力により突出方向に付勢されている。プランジャ322の突出方向の位置は、レバーブロック2に保持された節度部材325(図1)との当接により規制されている。プランジャ322が押し当たる節度部材325側の当接面には、シフト方向に配列された各シフト位置に対応する凹状の窪みが設けられている。この節度部材325とプランジャ322との組合せにより、シフト方向の操作に節度感(クリック感)が付与される。
【0032】
レバーブロック2は、図1〜図3に示すごとく、先端にシフトノブ212が取り付けられたシフトレバー21の根本側の基部をなす部材である。レバーブロック2は、シフトレバー21の軸方向に沿って延設されたマグネットホルダ23と、マグネットホルダ23を介して対向する一対のアーム部22と、を備えている。アーム部22の先端には、それぞれ、シフト軸20を貫通配置するための軸孔が穿孔されている。レバーブロック2は、アーム部22の軸孔に貫通配置されたシフト軸20を介して揺動台32に連結されている。マグネットホルダ23の先端には、直径10mmの円柱形状のマグネット230が配設されている。マグネット230の磁極方向は、シフトレバー21の軸方向に一致しており、マグネット230の回動位置によらず、常に仮想中心軸121、122に向かっている。
【0033】
本例では、マグネット230として、フェライト磁石よりなるマグネットを採用している。これに代えて、アルニコ磁石、ネオジム磁石等よりなるマグネットを採用することもできる。さらに、磁性粉を樹脂にバインドしたプラスチックマグネットを採用することも良い。また、永久磁石よりなるマグネットに代えて、電磁式のマグネットを採用することもできる。さらに、本例では、磁気センサ11にN極を対面させているが、S極を対面させても良い。
【0034】
センサ基板10は、図1〜図4に示すごとく、図示しないCPU、ROM、RAM等のほか、1チップの磁気センサ11を実装した基板である。CPUは、磁気センサ11の検出結果に基づいてデータ処理を実行するデータ処理部、シフトレバー21の操作を反映した電気信号を出力する信号出力部としての機能を備えている。ROMには、CPUで実行するソフトウェアプログラム等が格納されている。
【0035】
磁気センサ11は、図4及び図5に示すごとく、鉛直方向に作用する磁気成分を検出する磁気検出素子111〜114を内蔵したICチップである。磁気センサ11では、強磁性体材料よりなる円板状の磁性板115の外周4カ所に同一仕様の磁気検出素子111〜114が配置されている。そして、磁性板115及び磁気検出素子111〜114が配置された略円形状の領域が磁気検知部110となっている。シフト方向に当たるX軸方向に沿って磁気検出素子111、112が対向配置されており、セレクト方向に当たるY軸方向に沿って磁気検出素子113、114が対向配置されている。なお、本例では、マグネット230の直径約10mmの磁極面231に対して、磁気検知部110の大きさを直径0.5mm〜2.0mm程度に設定している。
【0036】
ここで、磁気センサ11による検出原理を図4及び図5を参照しながら説明しておく。X軸、Y軸、Z軸に沿う磁気成分Bx、By、Bzよりなる磁気ベクトルBが磁気センサに作用した場合、磁気成分のうち鉛直方向に作用するBzは、全ての磁気検出素子111〜114に対してほぼ均等に作用する。一方、X軸に沿う磁気成分Bxが磁気センサ11に作用すると、図5に示すごとく、磁性体である磁性板115に磁気誘導されて磁力線の湾曲が生じる。そうすると、X軸方向に配列された磁気検出素子111、112に対して、鉛直方向逆向きの磁力αBx(αは定数)が作用することになる。X軸方向と同じ仕様でY軸方向に配列された磁気検出素子113、114に対しても同様に、Y軸に沿う磁気成分Byに起因して鉛直方向逆向きの磁力αByが作用することになる。
【0037】
このとき、各磁気検出素子111〜114に作用する磁力B1〜B4は、次式のようになる。
B1= αBx+Bz
B2=−αBx+Bz
B3= αBy+Bz
B4=−αBy+Bz
【0038】
Bx、By、Bzは、上記の連立式に基づいて以下のように算出される。
Bx=(B1−B2)/2α
By=(B3−B4)/2α
Bz=(B1+B2+B3+B4)/4
このように本例の磁気センサ11によれば、磁気検知部110に作用する磁気について、3次元的な任意の作用方向を検出可能である。
【0039】
以上のように構成された本例のシフトレバー装置1では、図1〜図3に示すごとく、揺動台32の内側のセンサ空間100に、センサ基板10を保持する台座部312(基台31)が突出し、仮想中心軸121、122を越えて磁気センサ11が配置されている。本例では、磁気センサ11の磁気検知部110と第1の仮想中心軸121との距離L1が2mm、磁気検知部110と第2の仮想中心軸122との距離L1が20mmに設定されている。
【0040】
Hポジション151にシフトレバー21が位置するとき、マグネット230と磁気センサ11とがシフトレバー21の軸方向に沿って一直線上に並ぶ基準位置となる。この基準位置では、磁気検知部110とマグネット230の磁極面231とのギャップが3mmとなる。また、マグネット230の磁極面231と第1の仮想中心軸121との距離L2が23mm、磁極面231と第2の仮想中心軸122との距離L2が5mmとなる。さらに、この基準位置では、シフトレバー21の軸方向に沿ってマグネット230の磁極面231(直径10mm)に磁気検知部110(直径0.5〜2.0mm程度)を射影したときの射影形状が磁極面231の内側中央に位置するようになっている。
【0041】
シフトレバー装置1では、シフトレバー21の操作に応じて、磁気センサ11の外周側をマグネット230が回動する。このとき、磁気検知部110への磁気の作用方向が変化することになる。磁気センサ11により検出されるX軸に沿う磁気成分Bx、及びZ軸に沿う磁気成分Bzによれば、図6に示すごとくY軸に直交する平面内の磁気ベクトル(磁気の作用方向)の傾きθshをセンサ検出角として算出できる。
【0042】
磁気ベクトルの傾きθshに基づけば、シフト方向に操作されたときのシフト軸20回りのマグネット230の回動角、すなわちシフト方向のレバー角(操作角)を知ることができ、シフト方向(X軸方向)のシフトレバー21の操作位置を検出可能である。セレクト方向(Y軸方向)の操作についても、上記と同様、操作に応じて磁気検知部110に作用する磁気の作用方向が変化する。Y軸に沿う磁気成分By、及びZ軸に沿う磁気成分Bzによれば、図7に示すごとく、X軸に直交する平面内の磁気ベクトルの傾きθslをセンサ検出角として算出でき、これによりセレクト方向のシフトレバー21の操作位置を検出可能である。
【0043】
本例のシフトレバー装置1では、仮想中心軸121、122よりもマグネット230側に近づけて磁気センサ11が配置されている。このような磁気センサ11の配置は、以下に説明するような磁気的な作用効果を生み出している。
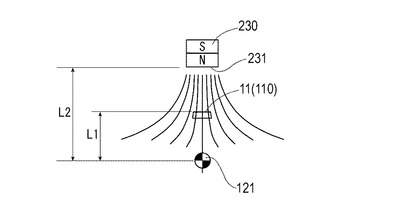
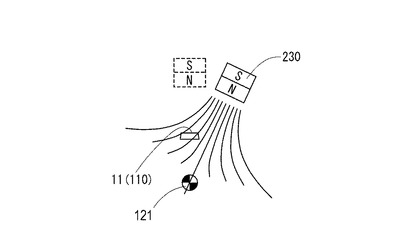
シフトレバー21がHポジション151(図1参照。)に位置するとき、図8のごとく、マグネット230の磁極面231から磁極方向に直線的に伸びる磁力線が磁気検知部110に作用する。一方、図9のごとくシフトレバー21がシフト方向に操作されたときには、図10及び図11のごとく、磁極方向に直線的に伸びる中心の磁力線が仮想中心軸121に向かう一方、仮想中心軸121よりもマグネット230側にオフセットする磁気検知部110に対しては、中心からずれて湾曲した磁力線が作用する。
【0044】
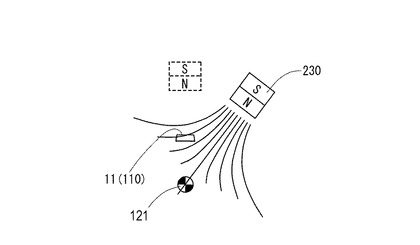
マグネット230の磁極面231から放射線状に伸びる磁力線は、磁極方向に当たる中心の磁力線が直線的である一方、中心からずれた磁力線は外側に湾曲している。そして、中心からのずれが大きくなるほど、その湾曲度合いが大きくなっている。そのため、図10と図11との対比から知られるように、マグネット230の回動角(レバー角)が大きくなるほど、中心からずれて一層湾曲した磁力線が磁気検知部110に作用するようになる。なお、このような傾向は、第2の仮想中心軸122を中心とした回動動作を伴うセレクト方向の操作についても全く同様である。
【0045】
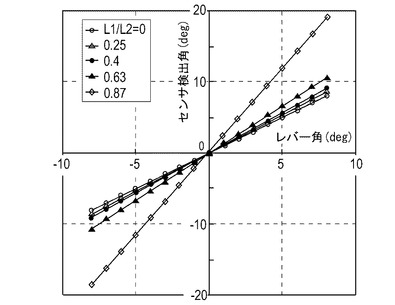
さらに、このような傾向の度合いは、仮想中心軸121、122とマグネット230との間隙における磁気センサ11の位置、すなわちセンサ位置比(L1/L2)に応じて異なっている。図12は、シフトレバー21の操作角であるレバー角と、磁気センサ11による検出角度であるセンサ検出角との関係が、センサ位置比(L1/L2)に応じてどのように変化するかをシミュレーションした結果を示すグラフである。このシミュレーションでは、センサ位置比(L1/L2)を0〜0.87まで変化させている。同図中の横軸はマグネット230の回動角に当たるレバー角を示し、縦軸は、センサ検出角を示している。
【0046】
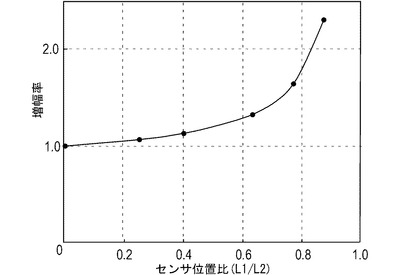
図12のシミュレーション結果から知られるようにセンサ位置比(L1/L2)が大きくなるほど、磁気センサ11によるセンサ検出角が大きくなっている。例えば、レバー角5度の場合であれば、センサ位置比(L1/L2)0のとき5度、同0.40のとき5.68度、同0.87のとき11.55度となっている。つまり、センサ位置比が大きくなるにつれて、レバー角に対するセンサ検出角の比率である増幅率が次第に大きくなっている。この増幅率は、センサ位置比と増幅率との相関関係を示す図13から知られる通り、センサ位置比が大きくなるにつれて2次曲線的に大きくなっている。
【0047】
本例のシフトレバー装置1では、上記のごとく、第1の仮想中心軸121については、磁気センサ11の磁気検知部110との距離L1が2mm、マグネット230の磁極面231との距離L2が5mmに設定されている(図2)。また、第2の仮想中心軸122については、磁気検知部110との距離L1が20mm、磁極面231との距離L2が23mmに設定されている(図3)。これにより、第1の仮想中心軸121に関するシフト方向のセンサ位置比(L1/L2)が0.4、第2の仮想中心軸122に関するセレクト方向のセンサ位置比(L1/L2)が約0.87になっている。図13のレバー角と増幅率との相関関係を表すグラフによれば、シフト方向では約1.1倍、セレクト方向では約2.3倍の増幅率が得られることになる。
【0048】
一方、本例のシフトレバー装置1では、上記のごとくシフト方向の操作ストロークとセレクト方向の操作ストロークとの比率が約2となっている。仮にシフト方向及びセレクト方向で増幅率が全く同じであると、シフト方向のセンサ検出角の変化量と、セレクト方向のセンサ検出角の変化量と、の比率がそのまま2となり、操作方向に応じて検出特性が大きく相違してしまう。
【0049】
このようなとき、上記のように操作方向に応じて異なるセンサ検出角の増幅率の設定が非常に有効に作用する。セレクト方向の増幅率をシフト方向よりも大きく設定すれば、シフト方向の操作ストローク(本例では2)に増幅率(同1.1)を掛け合わせた値と、セレクト方向の操作ストローク(同1)に増幅率(同2.3)を掛け合わせた値と、の比率を1に近づけることができる。そして、これにより、シフト方向とセレクト方向とでセンサ検出角の変化量の比率をほぼ1にでき、シフト方向及びセレクト方向の検出特性の相違を抑制できる。
【0050】
以上のように本例のシフトレバー装置1は、シフト方向及びセレクト方向の操作ストロークに大きな違いがあるにも関わらず、シフト方向の検出特性とセレクト方向の検出特性との違いが抑制され、各操作方向の検出特性が両立された優れた特性のシフトレバー装置である。
【0051】
なお、磁気センサ11としては、本例に代えて、互いに直交するX軸、Y軸、Z軸に沿って配設された3基の磁気検出素子を内蔵した1チップICを採用することもできる。
なお、センサギャップ(マグネット230と磁気センサ11との間隔)としては、例えば、フェライト磁石であれば1.5〜3.0mm程度に設定するのが良い。
本例では、シフトレバー21の軸方向に磁極方向が一致するようにその軸上にマグネット230を配置しているが、シフトレバー21の軸方向からオフセットしてマグネット230を配置しても良い。
【0052】
以上、実施例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0053】
1 シフトレバー装置
10 センサ基板
100 センサ空間
11 磁気センサ
110 磁気検知部
111〜114 磁気検出素子
115 磁性板
121、122 仮想中心軸
15 保護カバー
150 ゲート
151 Hポジション
2 レバーブロック
20 シフト軸
21 シフトレバー
230 マグネット
231 磁極面
30 セレクト軸
31 基台
312 台座部
32 揺動台
【技術分野】
【0001】
本発明は、車両のシフトレンジを選択するために車載される装置であって、シフトレバーの操作に応じて電気信号を出力するシフトレバー装置に関する。
【背景技術】
【0002】
従来、車両のシフトレバー装置には、機械的なリンク機構を採用したシフトチェンジ手段が多く用いられてきた。近年、車載機器の電子化の要請に対応できるよう、シフトレバーの操作を電気的に検出するシフトレバー装置が提案されている。このシフトレバー装置は、検出したシフトレバーの操作を電気信号に変換して出力する。
【0003】
上記のようなシフトレバー装置は、その出力信号に応じてアクチュエータを駆動してシフトチェンジを実現する、いわゆるバイワイヤ式のシフトレバー装置と呼ばれている。バイワイヤ式のシフトレバー装置では、トランスミッションとの間に複雑なリンク機構を配設する必要がなく、電気配線を取り回しするだけで良い。このようなシフトレバー装置を採用すれば、車両におけるシフト操作機構の設計自由度や設置自由度等を格段に向上できる。
【0004】
バイワイヤ式のシフトレバー装置としては、シフトレバーの回動動作の中心軸を超えて反対側に延設され先端にマグネットを保持するガイドロッドと、そのマグネットに対面するように配置された磁気センサと、を備えた装置が提案されている(例えば、特許文献1参照。)。このシフトレバー装置では、互いに直交するシフト方向及びセレクト方向にシフトレバーが操作されたときのガイドロッドの変位を検知することで操作位置を検出している。
【0005】
しかしながら、前記従来のシフトレバー装置では、次のような問題がある。すなわち、シフト方向の検出手段及びセレクト方向の検出手段として、マグネットと磁気センサとを組み合せた検出手段が共用されているため、シフト方向及びセレクト方向の検出特性の双方を理想的に両立させることが難しく、ある程度の妥協が不可避になっているという問題がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−223384号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、前記従来の問題点に鑑みてなされたものであり、互いに直交するシフト方向及びセレクト方向に操作可能なバイワイヤ式のシフトレバー装置であって、シフト方向の検出特性とセレクト方向の検出特性とが両立されたシフトレバー装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明は、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバーを備え、前記シフト方向と前記セレクト方向との間で操作範囲に大小の差が設けられた車両用のシフトレバー装置であって、
前記シフトレバーの基部をなし、前記シフト方向の操作に応じて第1の仮想中心軸の回りを回動すると共に、前記セレクト方向の操作に応じて第2の仮想中心軸の回りを回動するレバーブロックと、
前記シフトレバーが前記シフト方向に操作された際に磁極方向が前記第1の仮想中心軸に向かう状態を維持しながら当該第1の仮想中心軸の回りを回動すると共に、前記シフトレバーが前記セレクト方向に操作された際に磁極方向が前記第2の仮想中心軸に向かう状態を維持しながら当該第2の仮想中心軸の回りを回動するように前記レバーブロックに保持されたマグネットと、
前記マグネットが発生する磁気の作用方向を検出する磁気センサと、
該磁気センサを保持する基台と、
前記第1の仮想中心軸をなすシフト軸を介して前記レバーブロックを支持すると共に、前記第2の仮想中心軸をなすセレクト軸を介して回動可能な状態で前記基台に支持された揺動台と、
前記磁気センサが検出した磁気の作用方向に応じて前記シフトレバーの操作位置に対応する信号を出力する信号出力部と、を備え、
前記第1及び第2の仮想中心軸よりも前記磁気センサが前記マグネット側に近づけて配置され、前記マグネットの磁極方向に前記磁気センサが位置するときには該磁気センサに対して磁極方向の磁気が作用する一方、それ以外では磁極方向を中心として外側に湾曲する磁気が前記磁気センサに作用し、これにより、前記磁気センサによる磁気の作用方向の検出角であるセンサ検出角が前記シフトレバーの操作角であるレバー角に対して増幅されるように構成されており、
前記仮想中心軸から前記マグネットまでの距離L2に対する前記仮想中心軸から前記磁気センサまでの距離L1の比率であるセンサ位置比L1/L2が、前記第1の仮想中心軸と前記第2の仮想中心軸とで相違し、前記シフト方向及び前記セレクト方向のうち前記操作範囲が大きい操作方向に対応する仮想中心軸に関する前記センサ位置比が小さく、前記操作範囲が小さい操作方向に対応する仮想中心軸に関する前記センサ位置比が大きく設定されているシフトレバー装置にある(請求項1)。
【0009】
本発明のシフトレバー装置が備えるマグネットは、その磁極方向が前記仮想中心軸に向かう状態を維持しながらその回りを回動するように配設されている。前記シフトレバーが操作されたときには、前記マグネットが前記磁気センサの外周側を回動し、前記磁気センサに対する磁気の作用方向が変化する。
【0010】
ここで、前記マグネットの周辺磁界では、前記磁極方向に沿って直線的に伸びる磁力線を中心とし、この中心の磁力線からずれた磁力線が外側に湾曲している。このような磁力線の湾曲は、中心の磁力線からのずれが大きくなればなるほど、その度合いが大きくなっている。本発明のシフトレバー装置では、前記仮想中心軸よりも前記マグネット側に近づけて前記磁気センサを配置することで上記のような磁力線の湾曲を有用に活用し、以下に説明するような検出特性を実現している。
【0011】
本発明のシフトレバー装置では、前記仮想中心軸と前記磁気センサとを結ぶ一直線上に前記マグネットが位置したとき(以下、基準位置という。)、湾曲することなく前記磁極方向に直線的に伸びる中心の磁力線が前記磁気センサに作用する。前記マグネットが回動して基準位置からずれると、中心の磁力線が前記仮想中心軸に向かう一方、前記磁気センサに対しては、中心からずれて湾曲する磁力線が作用するようになる。この湾曲した磁力線の作用方向の傾きは、前記マグネットの回動角を表す前記レバー角に略一致する中心の磁力線の作用方向の傾きよりも大きく増幅されている。
【0012】
本発明のシフトレバー装置では、前記レバー角が増幅された角度で傾く磁力線が前記磁気センサに作用することになる。そして、前記マグネットの回動位置が前記基準位置からずれるほど、前記中心の磁力線からずれて湾曲度合いが大きい磁力線が前記磁気センサに作用し、上記のような増幅の度合いが拡大することになる。このように、本発明では、前記磁気センサを前記マグネット側に近づけて配置したことで、前記レバー角の変化に応じた前記センサ検出角の変化量が拡大され増幅されている。そして、このようなセンサ検出角の変化量の増幅度合いは、前記マグネットに対して前記磁気センサが接近しているほど、すなわち前記センサ位置比が大きくなるほど顕著になってくる。
【0013】
そこで、本発明のシフトレバー装置では、前記シフト方向及び前記セレクト方向の操作範囲に応じて前記センサ位置比の大きさを変更している。すなわち、前記操作範囲が狭いほど前記センサ位置比を大きく設定して前記センサ検出角の増幅度合いを大きくし、小さなレバー角の変化を確実性高く検出しようとしている。一方、前記操作範囲が広いほど前記センサ位置比を小さく設定して前記センサ検出角の増幅度合いを抑制することで、大きなレバー角の変化に対応できるようにしている。
【0014】
このように本発明のシフトレバー装置は、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバー装置であって、前記センサ位置比の設定に応じてシフト方向の検出特性とセレクト方向の検出特性とを両立した装置である。
【0015】
本発明における仮想中心軸とは、前記シフト方向あるいは前記セレクト方向に前記シフトレバーが操作されたときの回動動作の中心をなす軸である。前記マグネットの磁極方向がこの仮想中心軸に向かっているとは、軸方向の長さに制限のない仮想中心軸に対して前記磁極方向が交わることを意味している。
本発明における前記シフト方向及び前記セレクト方向の操作範囲は、前記シフトレバーの操作ストロークの長さに関する範囲であっても良く、前記シフトレバーの操作角度に関する範囲であっても良い。
【0016】
本発明の好適な一態様のシフトレバー装置では、前記レバー角に対する前記センサ検出角の増幅率と、前記センサ位置比L1/L2と、の相関関係に基づき、
前記シフト方向の操作範囲と増幅率とを掛け合わせた値と、前記セレクト方向の操作範囲と増幅率とを掛け合わせた値と、の比率が0.8〜1.2の範囲に収まるように前記第1及び第2の仮想中心軸に関するセンサ位置比が設定されている(請求項2)。
前記シフト方向及び前記セレクト方向において、前記掛け合わせた値を1に近く設定しておけば、前記センサ検出角の変化量を同等にでき、前記シフト方向及び前記セレクト方向について似通った検出特性を実現できる。
【0017】
本発明の好適な一態様のシフトレバー装置では、前記シフト方向の操作範囲と前記セレクト方向の操作範囲との比率が1.5以上である(請求項3)。
前記比率が1.5以上であると、前記シフト方向の検出特性と前記セレクト方向の検出特性との差が大きくなるため、本発明の作用効果が特に有効になる。
【0018】
本発明の好適な一態様のシフトレバー装置においては、前記磁気センサは、磁気を検知する磁気検知部を有し、該磁気検知部が、前記マグネットの磁極面の内側に包含され得る大きさである(請求項4)。
仮に、前記仮想中心軸側の前記マグネットの磁極面よりも前記磁気検知部が大きい場合には、該磁気検知部内の位置の違いによって磁気の作用方向が大きくばらつくおそれが生じる。特に、本発明では、上記のごとく中心の磁力線からずれて湾曲した磁力線を積極的に活用しているため、上記のような磁気の作用方向のばらつきが一層顕著になるおそれがある。そこで、本発明では、前記磁気検知部の大きさを、前記マグネットの磁極面に包含され得る大きさ、すなわち磁極面よりも小さい大きさに設定してある。このように小さい磁気検知部であれば、磁気の作用方向のばらつきを抑制でき、高精度な検出が可能になる。
【0019】
本発明における好適な一態様のシフトレバー装置における磁気センサは、相互の直交する3方向の磁気成分を計測可能である。
この場合には、前記磁気検知部に対する磁気の作用方向を3次元的に検出できるようになる。磁気の作用方向を3次元的に検出できれば、前記シフト方向と前記セレクト方向とを組み合わせた前記シフトレバーの2次元的な操作を一層高精度に検出できるようになる。
【図面の簡単な説明】
【0020】
【図1】実施例における、シフトレバー装置を示す斜視図。
【図2】実施例における、シフトレバー装置の断面構造を示す断面図(シフト軸に沿う断面)。
【図3】実施例における、シフトレバー装置の断面構造を示す断面図(セレクト軸に沿う断面)。
【図4】実施例における、磁気センサの検出原理を説明する説明図。
【図5】実施例における、X軸(Y軸)方向の磁気成分が磁気センサに作用する様子を示す説明図。
【図6】実施例における、XZ平面内のセンサ検出角θshを説明する説明図。
【図7】実施例における、YZ平面内のセンサ検出角θslを説明する説明図。
【図8】実施例における、磁気センサに作用する磁界を示す説明図。
【図9】実施例における、シフト方向に操作されたときのマグネットの回動位置を示す説明図(シフト軸に沿う断面図)。
【図10】実施例における、磁気センサに作用する磁界を示す説明図。
【図11】実施例における、磁気センサに作用する磁界を示す説明図。
【図12】実施例における、レバー角(マグネットの回動角)とセンサ検出角との関係を示すグラフ。
【図13】実施例における、センサ位置比と増幅率との関係を示すグラフ。
【発明を実施するための形態】
【0021】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例)
本例は、車両のシフトレンジを選択するために操作されるシフトレバー21を含むシフトレバー装置1に関する例である。この内容について、図1〜図13を用いて説明する。
【0022】
本例のシフトレバー装置1は、図1〜図3に示すごとく、互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバー21を有し、シフト方向(X軸方向)とセレクト方向(Y軸方向)との間で操作ストローク(操作範囲)に大小の差が設けられた車両用のシフトレバー装置である。
このシフトレバー装置1は、シフトレバー21の基部をなすレバーブロック2と、レバーブロック2に保持されたマグネット230と、このマグネット230が発生する磁気の作用方向を検出する磁気センサ11と、この磁気センサ11を保持する基台31と、基台31に支持された揺動台32と、磁気センサ11が検出した磁気の作用方向に応じてシフトレバー21の操作位置に対応する信号を出力する信号出力部と、を備えている。
【0023】
レバーブロック2は、シフト方向の操作に応じて第1の仮想中心軸121の回りを回動すると共に、セレクト方向に操作に応じて第2の仮想中心軸122の回りを回動する。このレバーブロック2に保持されたマグネット230は、シフトレバー21がシフト方向に操作されたときに磁極方向が第1の仮想中心軸121に向かう状態を保ちつつその回りを回動し、セレクト方向に操作されたときに磁極方向が第2の仮想中心軸122に向かう状態を保ちつつその回りを回動する。揺動台32は、シフト方向及びセレクト方向の操作が可能となるよう、第1の仮想中心軸121をなすシフト軸20を介してレバーブロック2を支持すると共に、第2の仮想中心軸122をなすセレクト軸30を介して回動可能な状態で基台31に支持されている。
【0024】
このシフトレバー装置1では、仮想中心軸121・122よりも磁気センサ11がマグネット230側に近づけて配置されている。仮想中心軸121(122)からマグネット230までの距離L2に対する仮想中心軸121(122)から磁気センサ11までの距離L1の比率であるセンサ位置比L1/L2は、シフト方向及びセレクト方向のシフトレバー21の操作ストロークに応じて第1の仮想中心軸121と第2の仮想中心軸122とで相違している。
以下、この内容について、詳しく説明する。
【0025】
シフトレバー装置1は、図1に示すごとく、運転者がシフトレバー21を操作可能なように、車両の運転席と助手席との間のセンターコンソールや、運転者に対面するダッシュパネル等に設置される装置である。本例のシフトレバー装置1は、互いに略直交するシフト方向(X軸方向)及びセレクト方向(Y軸方向)にシフトレバー21を操作可能なゲート式のタイプである。シフト方向は、運転者から見て前後方向の操作方向であり、セレクト方向は、左右方向の操作方向である。本例のシフトレバー装置1では、シフト方向の操作ストロークがセレクト方向の操作ストロークよりも長く、約2倍に設定されている。
【0026】
シフトレバー装置1では、図1〜図3に示すごとく、シフトレバー21が固定されたレバーブロック2、シフト方向に回動可能な状態でレバーブロック2を軸支する揺動台32等が保護カバー15の内部に収容されている。揺動台32は、装置の底面をなす基台31によりセレクト方向に回動可能な状態で軸支されている。保護カバー15の上面には、シフトレバー21の移動経路をなすゲート150が設けられている。各シフト位置には、D、Rなどのシフトレンジを表す記号が表示されている。
【0027】
シフトレバー装置1では、シフト方向の操作列が3列設定されており、セレクト方向にシフトレバー21を操作することでシフト方向の操作列を切り換え可能である。本例のシフトレバー装置1では、ゲート150が十字に交差する中央位置がホームポジション151(Hポジション)になっている。シフトレバー21は、常時、Hポジション151に向けて付勢されている。
【0028】
例えば、Hポジション151に位置するシフトレバー21(図2及び図3参照。)を図1中の右側(セレクト方向)に操作した後に手前(シフト方向)に引くように操作すればDポジジョンに操作できDレンジを選択できる。その後、運転者がシフトレバー21から手を離すと、Dレンジが選択された状態が維持されたまま、シフトレバー21がHポジション151に復帰する。また、例えば、Dレンジが選択されているときに、Hポジション151のシフトレバー21を手前に引けば−ポジションに操作できギアを一段下げることができる。さらに、例えば、Dレンジが選択されているときに、Hポジション151のシフトレバー21を左側に倒してNポジションに操作すればNレンジを選択できる。一方、Hポジションに復帰させることなくNポジションからさらに奥側に押し込んでRポジションに操作すればRレンジを選択できる。なお、シフトレバー21のシフトパターンは、本例には限定されない。本例のシフトレバー装置1における操作位置の検出方法を採用すれば、前後左右あらゆる方向の操作に対応可能である。
【0029】
次に、シフトレバー装置1を構成する各部品を説明する。基台31は、図1〜図3に示すごとく、装置の底部をなしている。矩形状を呈する底面の中央部分には、高さ方向に突出する台座部312が設けられている。台座部312の上面には、磁気センサ11が実装されたセンサ基板10が固定されている。基台31の底面には、台座部312を介して相互に対面する一対の支持片311が立設されている。一対の支持片311には、それぞれ、セレクト軸30を貫通配置させるための軸孔が穿孔されている。4隅には、保護カバー15を取り付けるためのビス孔318が穿孔されている。
【0030】
揺動台32は、図1〜図3に示すごとく、断面略矩形環状の筒状を呈する部材である。互いに反対側に面する2組の側面のうち、基台31の支持片311に対面する1組の側面には、外側に突出する座部321がそれぞれ設けられている。座部321の端面は、支持片311の軸孔に貫通配置されたセレクト軸30が立設固定される面である。他方の1組の側面には、シフト軸20が立設されている。シフト軸20及びセレクト軸30は、揺動台32の筒方向において異なる位置に立設あるいは立設固定される。シフト軸20は、車両搭載時の高さ方向の上側に配置され、セレクト軸30は下側に配置されている。
【0031】
揺動台32の内側空間に当たるセンサ空間100を取り囲む4箇所の側壁部のうち、シフト軸20の一方が立設される側壁部は、他の3箇所の側壁部よりも肉厚に形成されている。その肉厚の側壁部の上面には、プランジャ322を進退可能な状態で保持する円筒状のピン保持部323が立設されている。プランジャ322は、ピン保持部323の内部に収容されたスプリング324の付勢力により突出方向に付勢されている。プランジャ322の突出方向の位置は、レバーブロック2に保持された節度部材325(図1)との当接により規制されている。プランジャ322が押し当たる節度部材325側の当接面には、シフト方向に配列された各シフト位置に対応する凹状の窪みが設けられている。この節度部材325とプランジャ322との組合せにより、シフト方向の操作に節度感(クリック感)が付与される。
【0032】
レバーブロック2は、図1〜図3に示すごとく、先端にシフトノブ212が取り付けられたシフトレバー21の根本側の基部をなす部材である。レバーブロック2は、シフトレバー21の軸方向に沿って延設されたマグネットホルダ23と、マグネットホルダ23を介して対向する一対のアーム部22と、を備えている。アーム部22の先端には、それぞれ、シフト軸20を貫通配置するための軸孔が穿孔されている。レバーブロック2は、アーム部22の軸孔に貫通配置されたシフト軸20を介して揺動台32に連結されている。マグネットホルダ23の先端には、直径10mmの円柱形状のマグネット230が配設されている。マグネット230の磁極方向は、シフトレバー21の軸方向に一致しており、マグネット230の回動位置によらず、常に仮想中心軸121、122に向かっている。
【0033】
本例では、マグネット230として、フェライト磁石よりなるマグネットを採用している。これに代えて、アルニコ磁石、ネオジム磁石等よりなるマグネットを採用することもできる。さらに、磁性粉を樹脂にバインドしたプラスチックマグネットを採用することも良い。また、永久磁石よりなるマグネットに代えて、電磁式のマグネットを採用することもできる。さらに、本例では、磁気センサ11にN極を対面させているが、S極を対面させても良い。
【0034】
センサ基板10は、図1〜図4に示すごとく、図示しないCPU、ROM、RAM等のほか、1チップの磁気センサ11を実装した基板である。CPUは、磁気センサ11の検出結果に基づいてデータ処理を実行するデータ処理部、シフトレバー21の操作を反映した電気信号を出力する信号出力部としての機能を備えている。ROMには、CPUで実行するソフトウェアプログラム等が格納されている。
【0035】
磁気センサ11は、図4及び図5に示すごとく、鉛直方向に作用する磁気成分を検出する磁気検出素子111〜114を内蔵したICチップである。磁気センサ11では、強磁性体材料よりなる円板状の磁性板115の外周4カ所に同一仕様の磁気検出素子111〜114が配置されている。そして、磁性板115及び磁気検出素子111〜114が配置された略円形状の領域が磁気検知部110となっている。シフト方向に当たるX軸方向に沿って磁気検出素子111、112が対向配置されており、セレクト方向に当たるY軸方向に沿って磁気検出素子113、114が対向配置されている。なお、本例では、マグネット230の直径約10mmの磁極面231に対して、磁気検知部110の大きさを直径0.5mm〜2.0mm程度に設定している。
【0036】
ここで、磁気センサ11による検出原理を図4及び図5を参照しながら説明しておく。X軸、Y軸、Z軸に沿う磁気成分Bx、By、Bzよりなる磁気ベクトルBが磁気センサに作用した場合、磁気成分のうち鉛直方向に作用するBzは、全ての磁気検出素子111〜114に対してほぼ均等に作用する。一方、X軸に沿う磁気成分Bxが磁気センサ11に作用すると、図5に示すごとく、磁性体である磁性板115に磁気誘導されて磁力線の湾曲が生じる。そうすると、X軸方向に配列された磁気検出素子111、112に対して、鉛直方向逆向きの磁力αBx(αは定数)が作用することになる。X軸方向と同じ仕様でY軸方向に配列された磁気検出素子113、114に対しても同様に、Y軸に沿う磁気成分Byに起因して鉛直方向逆向きの磁力αByが作用することになる。
【0037】
このとき、各磁気検出素子111〜114に作用する磁力B1〜B4は、次式のようになる。
B1= αBx+Bz
B2=−αBx+Bz
B3= αBy+Bz
B4=−αBy+Bz
【0038】
Bx、By、Bzは、上記の連立式に基づいて以下のように算出される。
Bx=(B1−B2)/2α
By=(B3−B4)/2α
Bz=(B1+B2+B3+B4)/4
このように本例の磁気センサ11によれば、磁気検知部110に作用する磁気について、3次元的な任意の作用方向を検出可能である。
【0039】
以上のように構成された本例のシフトレバー装置1では、図1〜図3に示すごとく、揺動台32の内側のセンサ空間100に、センサ基板10を保持する台座部312(基台31)が突出し、仮想中心軸121、122を越えて磁気センサ11が配置されている。本例では、磁気センサ11の磁気検知部110と第1の仮想中心軸121との距離L1が2mm、磁気検知部110と第2の仮想中心軸122との距離L1が20mmに設定されている。
【0040】
Hポジション151にシフトレバー21が位置するとき、マグネット230と磁気センサ11とがシフトレバー21の軸方向に沿って一直線上に並ぶ基準位置となる。この基準位置では、磁気検知部110とマグネット230の磁極面231とのギャップが3mmとなる。また、マグネット230の磁極面231と第1の仮想中心軸121との距離L2が23mm、磁極面231と第2の仮想中心軸122との距離L2が5mmとなる。さらに、この基準位置では、シフトレバー21の軸方向に沿ってマグネット230の磁極面231(直径10mm)に磁気検知部110(直径0.5〜2.0mm程度)を射影したときの射影形状が磁極面231の内側中央に位置するようになっている。
【0041】
シフトレバー装置1では、シフトレバー21の操作に応じて、磁気センサ11の外周側をマグネット230が回動する。このとき、磁気検知部110への磁気の作用方向が変化することになる。磁気センサ11により検出されるX軸に沿う磁気成分Bx、及びZ軸に沿う磁気成分Bzによれば、図6に示すごとくY軸に直交する平面内の磁気ベクトル(磁気の作用方向)の傾きθshをセンサ検出角として算出できる。
【0042】
磁気ベクトルの傾きθshに基づけば、シフト方向に操作されたときのシフト軸20回りのマグネット230の回動角、すなわちシフト方向のレバー角(操作角)を知ることができ、シフト方向(X軸方向)のシフトレバー21の操作位置を検出可能である。セレクト方向(Y軸方向)の操作についても、上記と同様、操作に応じて磁気検知部110に作用する磁気の作用方向が変化する。Y軸に沿う磁気成分By、及びZ軸に沿う磁気成分Bzによれば、図7に示すごとく、X軸に直交する平面内の磁気ベクトルの傾きθslをセンサ検出角として算出でき、これによりセレクト方向のシフトレバー21の操作位置を検出可能である。
【0043】
本例のシフトレバー装置1では、仮想中心軸121、122よりもマグネット230側に近づけて磁気センサ11が配置されている。このような磁気センサ11の配置は、以下に説明するような磁気的な作用効果を生み出している。
シフトレバー21がHポジション151(図1参照。)に位置するとき、図8のごとく、マグネット230の磁極面231から磁極方向に直線的に伸びる磁力線が磁気検知部110に作用する。一方、図9のごとくシフトレバー21がシフト方向に操作されたときには、図10及び図11のごとく、磁極方向に直線的に伸びる中心の磁力線が仮想中心軸121に向かう一方、仮想中心軸121よりもマグネット230側にオフセットする磁気検知部110に対しては、中心からずれて湾曲した磁力線が作用する。
【0044】
マグネット230の磁極面231から放射線状に伸びる磁力線は、磁極方向に当たる中心の磁力線が直線的である一方、中心からずれた磁力線は外側に湾曲している。そして、中心からのずれが大きくなるほど、その湾曲度合いが大きくなっている。そのため、図10と図11との対比から知られるように、マグネット230の回動角(レバー角)が大きくなるほど、中心からずれて一層湾曲した磁力線が磁気検知部110に作用するようになる。なお、このような傾向は、第2の仮想中心軸122を中心とした回動動作を伴うセレクト方向の操作についても全く同様である。
【0045】
さらに、このような傾向の度合いは、仮想中心軸121、122とマグネット230との間隙における磁気センサ11の位置、すなわちセンサ位置比(L1/L2)に応じて異なっている。図12は、シフトレバー21の操作角であるレバー角と、磁気センサ11による検出角度であるセンサ検出角との関係が、センサ位置比(L1/L2)に応じてどのように変化するかをシミュレーションした結果を示すグラフである。このシミュレーションでは、センサ位置比(L1/L2)を0〜0.87まで変化させている。同図中の横軸はマグネット230の回動角に当たるレバー角を示し、縦軸は、センサ検出角を示している。
【0046】
図12のシミュレーション結果から知られるようにセンサ位置比(L1/L2)が大きくなるほど、磁気センサ11によるセンサ検出角が大きくなっている。例えば、レバー角5度の場合であれば、センサ位置比(L1/L2)0のとき5度、同0.40のとき5.68度、同0.87のとき11.55度となっている。つまり、センサ位置比が大きくなるにつれて、レバー角に対するセンサ検出角の比率である増幅率が次第に大きくなっている。この増幅率は、センサ位置比と増幅率との相関関係を示す図13から知られる通り、センサ位置比が大きくなるにつれて2次曲線的に大きくなっている。
【0047】
本例のシフトレバー装置1では、上記のごとく、第1の仮想中心軸121については、磁気センサ11の磁気検知部110との距離L1が2mm、マグネット230の磁極面231との距離L2が5mmに設定されている(図2)。また、第2の仮想中心軸122については、磁気検知部110との距離L1が20mm、磁極面231との距離L2が23mmに設定されている(図3)。これにより、第1の仮想中心軸121に関するシフト方向のセンサ位置比(L1/L2)が0.4、第2の仮想中心軸122に関するセレクト方向のセンサ位置比(L1/L2)が約0.87になっている。図13のレバー角と増幅率との相関関係を表すグラフによれば、シフト方向では約1.1倍、セレクト方向では約2.3倍の増幅率が得られることになる。
【0048】
一方、本例のシフトレバー装置1では、上記のごとくシフト方向の操作ストロークとセレクト方向の操作ストロークとの比率が約2となっている。仮にシフト方向及びセレクト方向で増幅率が全く同じであると、シフト方向のセンサ検出角の変化量と、セレクト方向のセンサ検出角の変化量と、の比率がそのまま2となり、操作方向に応じて検出特性が大きく相違してしまう。
【0049】
このようなとき、上記のように操作方向に応じて異なるセンサ検出角の増幅率の設定が非常に有効に作用する。セレクト方向の増幅率をシフト方向よりも大きく設定すれば、シフト方向の操作ストローク(本例では2)に増幅率(同1.1)を掛け合わせた値と、セレクト方向の操作ストローク(同1)に増幅率(同2.3)を掛け合わせた値と、の比率を1に近づけることができる。そして、これにより、シフト方向とセレクト方向とでセンサ検出角の変化量の比率をほぼ1にでき、シフト方向及びセレクト方向の検出特性の相違を抑制できる。
【0050】
以上のように本例のシフトレバー装置1は、シフト方向及びセレクト方向の操作ストロークに大きな違いがあるにも関わらず、シフト方向の検出特性とセレクト方向の検出特性との違いが抑制され、各操作方向の検出特性が両立された優れた特性のシフトレバー装置である。
【0051】
なお、磁気センサ11としては、本例に代えて、互いに直交するX軸、Y軸、Z軸に沿って配設された3基の磁気検出素子を内蔵した1チップICを採用することもできる。
なお、センサギャップ(マグネット230と磁気センサ11との間隔)としては、例えば、フェライト磁石であれば1.5〜3.0mm程度に設定するのが良い。
本例では、シフトレバー21の軸方向に磁極方向が一致するようにその軸上にマグネット230を配置しているが、シフトレバー21の軸方向からオフセットしてマグネット230を配置しても良い。
【0052】
以上、実施例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【符号の説明】
【0053】
1 シフトレバー装置
10 センサ基板
100 センサ空間
11 磁気センサ
110 磁気検知部
111〜114 磁気検出素子
115 磁性板
121、122 仮想中心軸
15 保護カバー
150 ゲート
151 Hポジション
2 レバーブロック
20 シフト軸
21 シフトレバー
230 マグネット
231 磁極面
30 セレクト軸
31 基台
312 台座部
32 揺動台
【特許請求の範囲】
【請求項1】
互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバーを備え、前記シフト方向と前記セレクト方向との間で操作範囲に大小の差が設けられた車両用のシフトレバー装置であって、
前記シフトレバーの基部をなし、前記シフト方向の操作に応じて第1の仮想中心軸の回りを回動すると共に、前記セレクト方向の操作に応じて第2の仮想中心軸の回りを回動するレバーブロックと、
前記シフトレバーが前記シフト方向に操作された際に磁極方向が前記第1の仮想中心軸に向かう状態を維持しながら当該第1の仮想中心軸の回りを回動すると共に、前記シフトレバーが前記セレクト方向に操作された際に磁極方向が前記第2の仮想中心軸に向かう状態を維持しながら当該第2の仮想中心軸の回りを回動するように前記レバーブロックに保持されたマグネットと、
前記マグネットが発生する磁気の作用方向を検出する磁気センサと、
該磁気センサを保持する基台と、
前記第1の仮想中心軸をなすシフト軸を介して前記レバーブロックを支持すると共に、前記第2の仮想中心軸をなすセレクト軸を介して回動可能な状態で前記基台に支持された揺動台と、
前記磁気センサが検出した磁気の作用方向に応じて前記シフトレバーの操作位置に対応する信号を出力する信号出力部と、を備え、
前記第1及び第2の仮想中心軸よりも前記磁気センサが前記マグネット側に近づけて配置され、前記マグネットの磁極方向に前記磁気センサが位置するときには該磁気センサに対して磁極方向の磁気が作用する一方、それ以外では磁極方向を中心として外側に湾曲する磁気が前記磁気センサに作用し、これにより、前記磁気センサによる磁気の作用方向の検出角であるセンサ検出角が前記シフトレバーの操作角であるレバー角に対して増幅されるように構成されており、
前記仮想中心軸から前記マグネットまでの距離L2に対する前記仮想中心軸から前記磁気センサまでの距離L1の比率であるセンサ位置比L1/L2が、前記第1の仮想中心軸と前記第2の仮想中心軸とで相違し、前記シフト方向及び前記セレクト方向のうち前記操作範囲が大きい操作方向に対応する仮想中心軸に関する前記センサ位置比が小さく、前記操作範囲が小さい操作方向に対応する仮想中心軸に関する前記センサ位置比が大きく設定されているシフトレバー装置。
【請求項2】
請求項1において、前記レバー角に対する前記センサ検出角の増幅率と、前記センサ位置比L1/L2と、の相関関係に基づき、
前記シフト方向の操作範囲と増幅率とを掛け合わせた値と、前記セレクト方向の操作範囲と増幅率とを掛け合わせた値と、の比率が0.8〜1.2の範囲に収まるように前記第1及び第2の仮想中心軸に関するセンサ位置比が設定されているシフトレバー装置。
【請求項3】
請求項1又は2において、前記シフト方向の操作範囲と前記セレクト方向の操作範囲との比率が1.5以上であるシフトレバー装置。
【請求項4】
請求項1〜3のいずれか1項において、前記磁気センサは、磁気を検知する磁気検知部を有し、該磁気検知部が、前記マグネットの磁極面の内側に包含され得る大きさであるシフトレバー装置。
【請求項1】
互いに直交するシフト方向及びセレクト方向に操作可能なシフトレバーを備え、前記シフト方向と前記セレクト方向との間で操作範囲に大小の差が設けられた車両用のシフトレバー装置であって、
前記シフトレバーの基部をなし、前記シフト方向の操作に応じて第1の仮想中心軸の回りを回動すると共に、前記セレクト方向の操作に応じて第2の仮想中心軸の回りを回動するレバーブロックと、
前記シフトレバーが前記シフト方向に操作された際に磁極方向が前記第1の仮想中心軸に向かう状態を維持しながら当該第1の仮想中心軸の回りを回動すると共に、前記シフトレバーが前記セレクト方向に操作された際に磁極方向が前記第2の仮想中心軸に向かう状態を維持しながら当該第2の仮想中心軸の回りを回動するように前記レバーブロックに保持されたマグネットと、
前記マグネットが発生する磁気の作用方向を検出する磁気センサと、
該磁気センサを保持する基台と、
前記第1の仮想中心軸をなすシフト軸を介して前記レバーブロックを支持すると共に、前記第2の仮想中心軸をなすセレクト軸を介して回動可能な状態で前記基台に支持された揺動台と、
前記磁気センサが検出した磁気の作用方向に応じて前記シフトレバーの操作位置に対応する信号を出力する信号出力部と、を備え、
前記第1及び第2の仮想中心軸よりも前記磁気センサが前記マグネット側に近づけて配置され、前記マグネットの磁極方向に前記磁気センサが位置するときには該磁気センサに対して磁極方向の磁気が作用する一方、それ以外では磁極方向を中心として外側に湾曲する磁気が前記磁気センサに作用し、これにより、前記磁気センサによる磁気の作用方向の検出角であるセンサ検出角が前記シフトレバーの操作角であるレバー角に対して増幅されるように構成されており、
前記仮想中心軸から前記マグネットまでの距離L2に対する前記仮想中心軸から前記磁気センサまでの距離L1の比率であるセンサ位置比L1/L2が、前記第1の仮想中心軸と前記第2の仮想中心軸とで相違し、前記シフト方向及び前記セレクト方向のうち前記操作範囲が大きい操作方向に対応する仮想中心軸に関する前記センサ位置比が小さく、前記操作範囲が小さい操作方向に対応する仮想中心軸に関する前記センサ位置比が大きく設定されているシフトレバー装置。
【請求項2】
請求項1において、前記レバー角に対する前記センサ検出角の増幅率と、前記センサ位置比L1/L2と、の相関関係に基づき、
前記シフト方向の操作範囲と増幅率とを掛け合わせた値と、前記セレクト方向の操作範囲と増幅率とを掛け合わせた値と、の比率が0.8〜1.2の範囲に収まるように前記第1及び第2の仮想中心軸に関するセンサ位置比が設定されているシフトレバー装置。
【請求項3】
請求項1又は2において、前記シフト方向の操作範囲と前記セレクト方向の操作範囲との比率が1.5以上であるシフトレバー装置。
【請求項4】
請求項1〜3のいずれか1項において、前記磁気センサは、磁気を検知する磁気検知部を有し、該磁気検知部が、前記マグネットの磁極面の内側に包含され得る大きさであるシフトレバー装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−103668(P2013−103668A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250305(P2011−250305)
【出願日】平成23年11月16日(2011.11.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.レバーブロック
【出願人】(591050970)津田工業株式会社 (61)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.レバーブロック
【出願人】(591050970)津田工業株式会社 (61)
【Fターム(参考)】
[ Back to top ]