
シフトレンジ切替制御装置
【課題】シフトバイワイヤ方式のシフトレンジ切替制御装置において、シフトレンジ切替用の操作部に対する中途半端な操作を検知し、運転者への警告等を行えるようにする。
【解決手段】モーメンタリ型のシフトレバー18が何れかのシフト位置(R、D、N)に一定時間以上停滞したなら、そのシフト位置にシフトレバー18が操作されたと判定して、モータを駆動することにより自動変速機のシフトレンジを、その判定したシフト位置に対応したレンジに切り替える装置は、シフトレバー18が原点位置から何れかのシフト位置へ至る途中の不定位置に移動した後、シフト位置へ至らず原点位置に戻ったこと(パターン(1))、又は、シフトレバー18が何れかのシフト位置に至ってから上記一定時間経過前に該シフト位置から離脱して原点位置に戻ったこと(パターン(2))を、シフトレバー18の位置を示すセンサ出力電圧Vv,Vhに基づき検出し、運転者に警告する。
【解決手段】モーメンタリ型のシフトレバー18が何れかのシフト位置(R、D、N)に一定時間以上停滞したなら、そのシフト位置にシフトレバー18が操作されたと判定して、モータを駆動することにより自動変速機のシフトレンジを、その判定したシフト位置に対応したレンジに切り替える装置は、シフトレバー18が原点位置から何れかのシフト位置へ至る途中の不定位置に移動した後、シフト位置へ至らず原点位置に戻ったこと(パターン(1))、又は、シフトレバー18が何れかのシフト位置に至ってから上記一定時間経過前に該シフト位置から離脱して原点位置に戻ったこと(パターン(2))を、シフトレバー18の位置を示すセンサ出力電圧Vv,Vhに基づき検出し、運転者に警告する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動変速機のシフトレンジをモータ等からなるアクチュエータを介して切り替える自動変速機のシフトレンジ切替制御装置に関する。
【背景技術】
【0002】
運転者によるシフトレバーの操作に従い自動変速機のシフトレンジを切り替える装置として、直流モータ等のアクチュエータを駆動することで自動変速機のシフトレンジ切替機構を作動させるシフト・バイ・ワイヤ方式のものが知られている。つまり、シフト・バイ・ワイヤ方式でシフトレンジを切り替えるシフトレンジ切替制御装置では、シフトレバーが操作されたシフト位置を電気的に検出し、自動変速機のシフトレンジが、その検出したシフト位置に対応するシフトレンジとなるように、アクチュエータを駆動する。そして、この種のシフトレンジ切替制御装置によれば、自動変速機のシフトレンジを運転者によるシフトレバーの操作力によって直接切り替える旧来方式のように、シフトレバーとシフトレンジ切替機構とを機械的に接続する必要がないことから、車両に搭載する際のレイアウト上の制限がない等の利点がある(例えば、特許文献1,2参照)。
【0003】
また、シフト・バイ・ワイヤ方式では、シフトレンジを切り替えるために操作されるシフトレバー等の操作部の形式として、モーメンタリ型(自動復帰型とも呼ばれる)と、オルタネート型(位置保持型とも呼ばれる)とがある。
【0004】
モーメンタリ型の操作部は、力が加えられることで原点位置から何れかの操作確定位置に移動し、力が取り除かれると自動的に原点位置へ戻るタイプのものである(例えば、特許文献2参照)。
【0005】
オルタネート型の操作部は、力が加えられることで、何れかの操作確定位置から他の操作確定位置へと移動し、力が取り除かれてもその位置が変わらないタイプのものであり、旧来方式のシフトレンジ切替システムでも用いられている。
【0006】
ここで、従来より、シフト・バイ・ワイヤ方式のシフトレンジ切替制御装置においては、シフトレバーの操作状態をCCDカメラで撮影し、その撮影映像に基づいて、シフトレバーが運転者以外の人によって操作されたこと等、運転者の意志に反して操作されたことを検知した場合には、そのシフトレバーの操作を無効化する、といった技術が提案されている(例えば、特許文献2参照)。
【0007】
また例えば、運転者がブレーキを踏まずにシフトレバーをドライブ(D)又はリバース(R)のシフト位置に操作したことを検知した場合には、その操作を受け付けずに無効化する、といった技術も知られている。
【特許文献1】特開2000−170905号公報
【特許文献2】特開2002−254941号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記従来の技術は、運転者の意志に反した操作や、複数の操作の組み合わせによる明らかな誤操作を検出するものであり、運転者が意志を持って操作部を操作したものの、その操作が中途半端でシフトレンジ切替制御装置に認識されない、という事態を検出するものではない。
【0009】
こうした中途半端な操作としては、例えば、操作部としてのシフトレバーがモーメンタリ型であるとすると、運転者がシフトレバーを原点位置から何れかのシフト位置へ向けて操作したものの、シフトレバーが目的のシフト位置に到達する前に、シフトレバーから手を放してしまったり、シフトレバーが目的のシフト位置に到達したとしても、シフトレンジ切替制御装置がそのことを認識するよりも前に、シフトレバーから手を放してしまった、という操作が考えられる。
【0010】
また例えば、操作部としてのシフトレバーがオルタネート型であるとすると、運転者がシフトレバーを何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、シフトレバーが何れかシフト位置から目的のシフト位置へ至る途中の不定位置にある段階で、シフトレバーから手を放してしまった、という操作が考えられる。この場合、シフトレバーの位置は何れのシフト位置でもない不定位置となり、シフトレンジ切替制御装置はシフトレバーが操作されたことを認識しない。
【0011】
そして、上記のような中途半端な操作が行われた場合、運転者はシフトレバーを操作したつもりであるのに対して、シフトレンジ切替制御装置はシフトレバーの操作を認識せずにシフトレンジの切り替えを実施しないため、運転者が自分の予期しない方向に車両を動かしてしまったりする可能性がある。
【0012】
そこで、本発明は、シフト・バイ・ワイヤ方式のシフトレンジ切替制御装置において、シフトレンジ切替用の操作部に対する中途半端な操作を検知して、運転者への警告などを行えるようにすることを目的としている。
【課題を解決するための手段】
【0013】
請求項1のシフトレンジ切替制御装置は、車両に搭載された自動変速機のシフトレンジを切り替えるために操作されるモーメンタリ型の操作部が、原点位置から操作確定位置まで操作されたか否かを判定する操作判定手段を備えている。尚、操作確定位置とは、何れかのシフトレンジに対応して設定された操作位置のことである。
【0014】
そして、このシフトレンジ切替制御装置は、操作判定手段により操作部が操作確定位置まで操作されたと判定されると、アクチュエータを駆動することにより、自動変速機のシフトレンジを前記判定された操作確定位置に対応するレンジへと切り替える。
【0015】
ここで特に、請求項1のシフトレンジ切替制御装置は、中途半端操作検出手段を備えている。
その中途半端操作検出手段は、操作部の位置を検出する検出器からの位置検出信号であって、操作部が、原点位置と、操作確定位置と、原点位置から操作確定位置へ至る途中の位置(即ち、原点位置でも操作確定位置でもない不定位置)との、何れにあるかを識別可能な位置検出信号を参照する。そして、中途半端操作検出手段は、その検出器からの位置検出信号に基づいて、操作部が、原点位置から不定位置に移動した後、操作判定手段により該操作部が操作確定位置まで操作されたと判定されることなく原点位置に戻ったことを、操作部への中途半端な操作として検出する。
【0016】
このようなシフトレンジ切替制御装置によれば、運転者が意志を持って操作部を操作したものの、その操作が不十分であることから、操作判定手段により操作部が操作確定位置まで操作されたとは判定されずに、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのような操作部に対する不十分な操作を、中途半端な操作として検出することができる。
【0017】
よって、例えば請求項5に記載の如く、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、車両の運転者に対して警告する処理を行う警告手段を設ければ、操作部に対する操作が当該シフトレンジ切替制御装置に受け付けられていないこと(換言すれば、その操作が無効であること)を運転者に知らせることができ、延いては、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。尚、警告手段が行う処理としては、例えば、今回の操作部への操作が無効であることを、車室内の表示部に表示させたり音で知らせる、といった処理が考えられる。
【0018】
ところで、中途半端操作検出手段は、請求項2に記載のように、操作部が、原点位置から不定位置に移動した後、操作確定位置へ至ることなく原点位置に戻ったことを、操作部への中途半端な操作として検出するように構成することができる。
【0019】
このように構成すれば、運転者が操作部を原点位置から操作確定位置へ向けて操作したものの、操作部が目的の操作確定位置に到達する前に、操作部から手を放してしまった場合に、そのような操作を、中途半端な操作として検出することができる。
【0020】
また、操作判定手段が、「操作部が一定時間Ta以上継続して操作確定位置に停滞したか否かを判定し、その判定で肯定判定した場合に、操作部が操作確定位置まで操作されたと判定する」という停滞時間条件付きの判定を行うようになっているならば、中途半端操作検出手段は、請求項3に記載のように構成することができる。即ち、中途半端操作検出手段は、操作部が、操作確定位置に至ってから上記一定時間Taが経過する前に該操作確定位置から離脱して原点位置に戻ったことを、操作部への中途半端な操作として検出するように構成すれば良い。
【0021】
このように構成すれば、運転者が操作部を原点位置から操作確定位置まで操作したものの、操作部から手を放すのが早すぎて、操作部の操作確定位置での停滞時間が上記一定時間Ta未満であった場合に、そのような操作を、中途半端な操作として検出することができる。
【0022】
尚、操作判定手段が、上記の停滞時間条件付きの判定を行うようになっている場合、中途半端操作検出手段は、操作部が、原点位置から不定位置に移動した後、操作確定位置へ至ることなく原点位置に戻ったことと、操作部が、操作確定位置に至ってから上記一定時間Taが経過する前に該操作確定位置から離脱して原点位置に戻ったこととの、それぞれを、操作部への中途半端な操作として検出するように構成するのが好ましい。それは、請求項2に従属する請求項3の構成である。
【0023】
一方、請求項4のシフトレンジ切替制御装置は、車両に搭載された自動変速機のシフトレンジを複数通りのシフトレンジの何れかに切り替えるために操作される操作部が、複数通りのシフトレンジの何れかに対応したシフト位置に操作されたことを検出すると、アクチュエータを駆動することにより、自動変速機のシフトレンジを前記検出したシフト位置に対応するシフトレンジへと切り替える。
【0024】
そして特に、請求項4のシフトレンジ切替制御装置は、以下のような中途半端操作検出手段を備えている。
その中途半端操作検出手段は、操作部の位置を検出する検出器からの位置検出信号であって、操作部が、何れかのシフトレンジに対応したシフト位置から他のシフトレンジに対応したシフト位置へ至る途中の位置(即ち、シフト位置間の不定位置)にあることを識別可能な位置検出信号を参照する。そして、中途半端操作検出手段は、その検出器からの位置検出信号に基づいて、操作部が、前記不定位置に所定時間以上停滞していることを、操作部への中途半端な操作として検出する。
【0025】
このようなシフトレンジ切替制御装置によれば、運転者が意志を持って操作部を操作したものの、その操作が不十分で操作部が不定位置で止まってしまい、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのような操作部に対する不十分な操作を、中途半端な操作として検出することができる。つまり、運転者が操作部を何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、操作部が目的のシフト位置へ至る途中の不定位置にある段階で操作部から手を放してしまった、という操作を行った場合、その操作が中途半端な操作として検出される。
【0026】
そして、この請求項4のシフトレンジ切替制御装置においても、例えば請求項5に記載の如く、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、車両の運転者に対して警告する処理を行う警告手段を設ければ、操作部に対する操作が当該シフトレンジ切替制御装置に受け付けられていないこと(換言すれば、その操作が無効であること)を運転者に知らせることができ、延いては、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。
【0027】
次に、請求項6のシフトレンジ切替制御装置では、請求項1〜5のシフトレンジ切替制御装置において、履歴記録手段を備えている。そして、その履歴記録手段は、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、そのことを示す履歴情報を記憶手段に書き込む。
【0028】
このようなシフトレンジ切替制御装置によれば、記憶手段から履歴情報を読み出すことで、操作部への中途半端な操作が行われたか否かを調査できるようになる。このため、例えば、運転者が、操作部への中途半端な操作に起因した勘違い(即ち、操作部を操作してシフトレンジを切り替えたつもりが、その操作が不十分でシフトレンジが切り替わらなかったという勘違い)により車両を逆走させたりオーバーランさせたりして事故が起こった場合に、その事故が運転者の誤操作(即ち、中途半端な操作)によるものであったことを証明することができるようになる。
【0029】
尚、記憶手段としては、EEPROMやフラッシュメモリ等のデータ書き替え可能な不揮発性メモリ、又は電源バックアップされた揮発性メモリを用いることができる。
また、請求項1〜3のシフトレンジ切替制御装置において、操作部の操作確定位置が複数ある場合、履歴情報としては、操作部が原点位置から向かった操作確定位置がどれであるか(換言すれば、操作部が動かされた方向)を示す情報を含むようにすることが好ましい。同様に、請求項4のシフトレンジ切替制御装置においても、履歴情報としては、操作部が向かったシフト位置がどれであるかを示す情報を含むようにすることが好ましい。
【0030】
また更に、請求項7に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの時間も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた時間を基にして、運転者が操作部への中途半端な操作をいつ行ったかを調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【0031】
また、請求項8に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの車両の走行距離も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた走行距離を基にして、運転者が操作部への中途半端な操作を行った時期を調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【0032】
また、請求項9に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの車両の位置情報も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた位置情報を基にして、運転者が操作部への中途半端な操作を行った場所を調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【発明を実施するための最良の形態】
【0033】
以下に、本発明が適用された実施形態について説明する。
[第1実施形態]
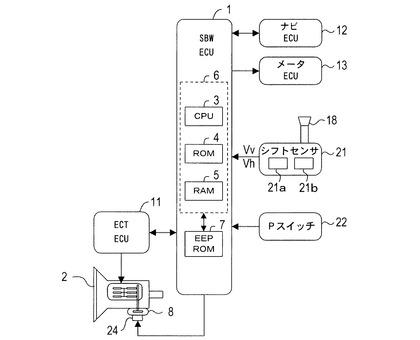
まず図1は、シフトレンジ切替制御装置としてのシフト・バイ・ワイヤECU(以下、SBWECUという)1と、それの周辺装置とを表す構成図である。
【0034】
尚、ECUとは、電子制御装置のことである。そして、SBWECU1は、車両に搭載された自動変速機2のシフトレンジを、複数通りの各種レンジであって、本実施形態では、パーキングロック(P),ニュートラル(N),前に自走可能なドライブ(D),後に自走可能なリバース(R)の何れかに、シフト・バイ・ワイヤ方式で切り替える制御を行うECUである。また、以下の説明においては、パーキングロック,ニュートラル,ドライブ,リバースの各々を、単にP,N,D,Rと記載する。
【0035】
SBWECU1は、CPU3、ROM4及びRAM5などを有した周知のマイコン6と、記憶内容が電気的に書き替え可能な不揮発性メモリであるEEPROM7とを備えている。
【0036】
また、SBWECU1には、ECTECU11と、ナビECU12と、メータECU13と、シフトセンサ21と、Pスイッチ22と、自動変速機2のシフトレンジ切替機構8を作動させる動力源としてのアクチュエータ(本実施形態ではモータ)24とが接続されている。
【0037】
ECTECU11は、自動変速機2のシフトレンジが“D”になっている場合に、自動変速機2の内部に設けられている変速用ソレノイドを駆動することにより、その自動変速機2の変速段を制御する。
【0038】
ナビECU12は、車両のナビゲーション装置を制御するECUである。
メータECU13は、車両のインストルメントパネル内の表示機器等を制御するECUであり、例えば、上記表示機器に、車速、エンジン回転数、水温、自動変速機2の現在のシフトレンジなどを表示させる。
【0039】
シフトセンサ21は、車両の運転席に設けられたシフトレンジ切替用操作部としてのシフトレバー18が何れのシフト位置に操作されたかを検知するためのセンサである。
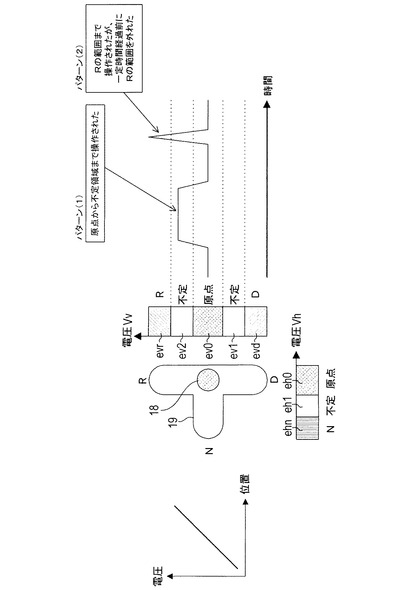
ここで、図2に示すように、本実施形態において、シフトレバー18は、Tの字を横向きにした形のシフトゲージ19内に移動可能に立設され、そのシフトゲージ19に沿って“P”以外の各シフトレンジ(N,D,R)に対応したシフト位置に操作されるモーメンタリ型のシフトレバーである。
【0040】
具体的に説明すると、シフトレバー18が移動するシフトゲージ19は、縦方向溝と、その縦方向溝の中心位置から横方向に伸びた横方向溝とからなる。そして、縦方向溝の中心位置で且つ横方向溝の図2における右端位置が、シフトレバー18の原点位置となっている。そして更に、縦方向溝の図2における上端位置が“R”のシフト位置(以下、R位置ともいう)で、縦方向溝の図2における下端位置が“D”のシフト位置(以下、D位置ともいう)で、横方向溝の図2における左端位置が“N”のシフト位置(以下、N位置ともいう)となっている。また、原点位置からD位置へ至る途中の位置と、原点位置からR位置へ至る途中の位置と、原点位置からN位置へ至る途中の位置は、それぞれ、原点位置でもシフト位置でもない不定位置になっている。
【0041】
そして、シフトセンサ21は、シフトレバー18の縦方向の位置に応じた電圧を出力する縦方向センサ21aと、シフトレバー18の横方向の位置に応じた電圧を出力する横方向センサ21bとからなる。そして更に、図2に示すように、縦方向センサ21aの出力電圧Vvは、シフトレバー18がD位置から遠ざかるほど(つまり、R位置の方向へ移動するほど)大きくなり、横方向センサ21bの出力電圧Vhは、シフトレバー18がN位置から遠ざかるほど(つまり、原点位置の方向へ移動するほど)大きくなる。
【0042】
尚、シフトレバー18がシフトゲージ19における縦方向溝の何れかの位置にある場合、そのシフトレバー18は、横方向については原点にあることになるため、横方向センサ21bの出力電圧Vhは最大となる。また、シフトレバー18がシフトゲージ19における横方向溝の何れかの位置にある場合、そのシフトレバー18は、縦方向については原点にあることになるため、縦方向センサ21aの出力電圧Vvは、最大値と最小値との中間値(即ち、D位置での電圧とR位置での電圧との中間値)となる。一方、こうしたシフトセンサ21(縦方向センサ21a及び横方向センサ21b)は、例えば、シフトレバー18の位置に応じて2つの抵抗素子の抵抗値比率が変化するポテンショメータによって構成することができる。
【0043】
Pスイッチ22は、自動変速機2のシフトレンジを“P”に切り替えるために操作されるプッシュ式のスイッチであり、押されることで、SBWECU1へ、そのPスイッチ22が操作されたことを示す信号を出力する。
【0044】
シフトレンジ切替機構8は、モータ24の動力により、自動変速機2のシフトレンジを“P”,“N”,“D”,“R”の各レンジに切り替えるものであり、例えば前述した特許文献1等に記載されているような周知のものである。
【0045】
そして、本実施形態のSBWECU1は、Pスイッチ22からの信号により、そのPスイッチ22が押されたことを検知すると、モータ24を駆動してシフトレンジ切替機構8を作動させることにより、自動変速機2のシフトレンジを“P”に切り替え、また、シフトセンサ21からの信号により、シフトレバー18が原点位置から“N”,“D”,“R”の何れかのシフト位置に操作されたと判定すると、モータ24を駆動してシフトレンジ切替機構8を作動させることにより、自動変速機2のシフトレンジを、その判定したシフト位置に対応するレンジへと切り替える。尚、こうしたSBWECU1の動作は、マイコン6によって行われるものである。
【0046】
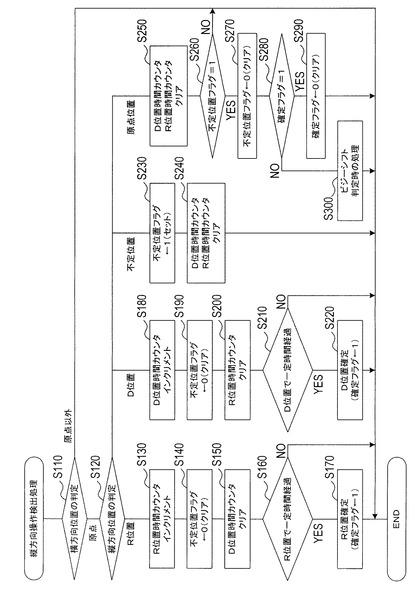
そこで次に、SBWECU1のマイコン6が、シフトレバー18に対する縦方向の操作を検出するために実行する縦方向操作検出処理について、図3を用い説明する。尚、この縦方向操作検出処理は、予め定められた一定の時間毎に繰り返し実行される定期処理である。
【0047】
図3に示すように、マイコン6が縦方向操作検出処理の実行を開始すると、まずS110にて、シフトセンサ21を成す横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18が横方向の原点にあるか否か(換言すれば、シフトレバー18がシフトゲージ19における縦方向溝内にあるか否か)を判定する。具体的には、横方向センサ21bの出力電圧Vhが、シフトレバー18が横方向の原点にあると考えられる電圧範囲eh0に入っているか否かを判定する(図2参照)。
【0048】
そして、シフトレバー18が横方向の原点にないと判定した場合には、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18が横方向の原点にあると判定した場合には、S120に進む。
【0049】
S120では、シフトセンサ21を成す縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18の縦方向位置(即ち、シフトゲージ19における縦方向溝での位置)が、R位置とD位置と原点位置と不定位置との何れであるかを判定する。具体的には、縦方向センサ21aの出力電圧Vvが、シフトレバー18がR位置にあると考えられる電圧範囲evrと、シフトレバー18がD位置にあると考えられる電圧範囲evdと、シフトレバー18が縦方向の原点にあると考えられる電圧範囲ev0と、シフトレバー18が不定位置にあると考えられる各電圧範囲ev1,ev2との、何れに入っているか否かを判定する(図2参照)。
【0050】
そして、このS120にて、シフトレバー18の縦方向位置がR位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、R位置に該当する電圧範囲evrに入っていると判定した場合)には、S130に進み、R位置時間カウンタをインクリメントする。このR位置時間カウンタは、シフトレバー18がR位置に停滞している継続時間を計測するためのカウンタである。
【0051】
次にS140にて、シフトレバー18が不定位置にあったことを示す不定位置フラグを0にクリアし、続くS150にて、D位置時間カウンタを0にクリアする。このD位置時間カウンタは、シフトレバー18がD位置に停滞している継続時間を計測するためのカウンタである。
【0052】
次にS160にて、R位置時間カウンタの値に基づき、シフトレバー18がR位置に一定時間Ta以上継続して停滞しているか否かを判定する。具体的には、R位置時間カウンタの値が、その一定時間Taに相当する値以上になったか否かを判定する。そして、シフトレバー18がR位置に一定時間Ta以上停滞していないと判定した場合には(S160:NO)、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18がR位置に一定時間Ta以上停滞していると判定した場合には(S160:YES)、S170に進む。
【0053】
S170では、シフトレバー18がR位置に操作されたと判定して、そのことを示すR位置確定フラグに1をセットする。そして、その後、当該縦方向操作検出処理を終了する。
【0054】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、R位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“R”へと切り替える。
【0055】
また、上記S120にて、シフトレバー18の縦方向位置がD位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、D位置に該当する電圧範囲evdに入っていると判定した場合)には、S180に進み、D位置時間カウンタをインクリメントする。
【0056】
次にS190にて、不定位置フラグを0にクリアし、続くS200にて、R位置時間カウンタを0にクリアする。
次にS210にて、D位置時間カウンタの値に基づき、シフトレバー18がD位置に一定時間Ta以上継続して停滞しているか否かを判定する。具体的には、D位置時間カウンタの値が、その一定時間Taに相当する値以上になったか否かを判定する。そして、シフトレバー18がD位置に一定時間Ta以上停滞していないと判定した場合には(S210:NO)、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18がD位置に一定時間Ta以上停滞していると判定した場合には(S210:YES)、S220に進む。
【0057】
S220では、シフトレバー18がD位置に操作されたと判定して、そのことを示すD位置確定フラグに1をセットする。そして、その後、当該縦方向操作検出処理を終了する。
【0058】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、D位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“D”へと切り替える。
【0059】
また、上記S120にて、シフトレバー18の縦方向位置が不定位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、不定位置に該当する電圧範囲ev1,ev2の何れかに入っていると判定した場合)には、S230に進み、不定位置フラグに1をセットする。そして、続くS240にて、D位置時間カウンタとR位置時間カウンタを0にクリアし、その後、当該縦方向操作検出処理を終了する。
【0060】
また、上記S120にて、シフトレバー18の縦方向位置が原点位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、原点位置に該当する電圧範囲ev0に入っていると判定した場合)には、S250に進み、D位置時間カウンタとR位置時間カウンタを0にクリアする。
【0061】
次にS260にて、不定位置フラグが1であるか否かを判定し、不定位置フラグが1であれば、次のS270にて、その不定位置フラグを0にリセットする。尚、この場合は、シフトレバー18が不定位置から原点位置に戻った直後である。
【0062】
そして、次のS280にて、R位置確定フラグとD位置確定フラグとの何れかが1であるか否かを判定し、それら確定フラグの何れかが1であると判定した場合には、次のS290にて、その1である確定フラグを0にクリアする。そして、その後、当該縦方向操作検出処理を終了する。
【0063】
このため、S170又はS220でシフトレバー18がR位置又はD位置まで操作されたと判定された後、シフトレバーが、そのR位置又はD位置から不定位置を通って原点位置に戻った場合には、上記S250〜S290の処理が行われることとなる。
【0064】
一方、上記S280にて、R位置確定フラグとD位置確定フラグとの何れも1ではないと判定した場合には、シフトレバー18が原点位置から不定位置に移動した後、上記S170又はS220で当該シフトレバー18がR位置又はD位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなシフトレバー18への中途半端な操作(シフトレンジの切り替えに至らない無効な操作であり、慌てたいい加減な操作であることから、以下、ビジー(busy)シフトという)が行われたと判断して、S300に移行する。
【0065】
S300では、ビジーシフト判定時の処理として、ビジーシフトが行われたこと(換言すれば、今回のシフトレバー18の操作が無効であること)を運転者に警告する処理を行う。例えば、メータECU13に指令を与えて、インストルメントパネル内の発音器(ブザーやチャイム等)から警告音を出力させたり、インストルメントパネル内の表示機器に警告のためのメッセージ(アイコンや文章)を表示させる。
【0066】
更にS300では、ビジーシフト判定時の処理として、ビジーシフトが行われたことを示す履歴情報を、EEPROM7に記憶する。
その履歴情報は、何れのシフト位置方向へのビジーシフトであるかを示す方向情報と共に、そのビジーシフトを検出したときの、時間情報、車両の走行距離、及び車両の位置情報も含むものである。
【0067】
そして、何れのシフト位置方向へのビジーシフトであるかは、前回の当該縦方向操作検出処理におけるS120での判定結果によって判別する。つまり、前回のS120で、シフトレバー18が原点位置からR位置へ至るまでの不定位置にあると判定していた場合には、R位置方向へのビジーシフトであると判別することができ、同様に、前回のS120で、シフトレバー18が原点位置からD位置へ至るまでの不定位置にあると判定していた場合には、D位置方向へのビジーシフトであると判別することができる。
【0068】
また、時間情報としては、1日のうちの時刻や年月日も含む時刻が好ましいが、例えば車両のイグニッションスイッチがオンされてからの経過時間でも良い。また、時間情報としての時刻や、車両の走行距離は、例えばメータECU13から取得することができ、車両の位置情報は、例えばナビECU12から取得することができる。
【0069】
そして、このようなS300の処理を終えると、当該縦方向操作検出処理を終了する。
尚、マイコン6は、SBWECU1と通信可能に接続される診断装置(いわゆる診断ツール)からの要求を受けると、その診断装置へEEPROM7内の履歴情報を送信するようになっている。また、上記のような履歴情報を記憶する記憶手段としては、EEPROM7に限らず、例えば、電源バックアップされた揮発性メモリ(いわゆるバックアップRAMやスタンバイRAMと呼ばれるメモリ)を用いても良い。この場合、マイコン6は、診断装置からの要求に応じて、その電源バックアップされた揮発性メモリ内の履歴情報を、上記診断装置へ送信するようになっていれば良い。
【0070】
一方、上記S260で不定位置フラグが1ではないと判定した場合には、前回の処理時にもシフトレバー18が原点位置にあったということであるため、そのまま当該縦方向操作検出処理を終了する。
【0071】
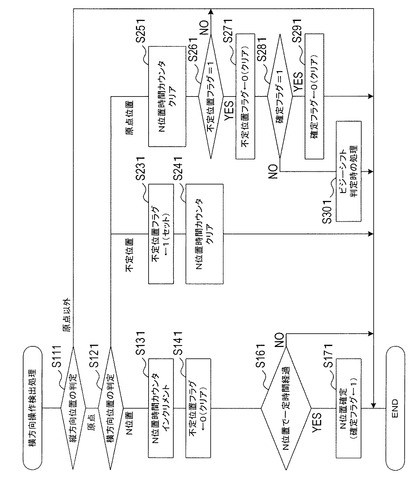
また、マイコン6は、シフトレバー18の横方向の操作についても、図3と同様の、図4に示す横方向操作検出処理を行う。尚、その横方向操作検出処理は、図3の縦方向操作検出処理と並行して、一定の時間毎に繰り返し実行される。また、図4において、図3と同じか同様の処理ステップについては、図3のステップ番号に1を加えたステップ番号を付している。
【0072】
図4に示すように、マイコン6が横方向操作検出処理の実行を開始すると、まずS111にて、シフトセンサ21を成す縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18が縦方向の原点にあるか否か(換言すれば、シフトレバー18がシフトゲージ19における横方向溝内にあるか否か)を判定する。具体的には、縦方向センサ21aの出力電圧Vvが、前述の電圧範囲ev0に入っているか否かを判定する(図2参照)。
【0073】
そして、シフトレバー18が縦方向の原点にないと判定した場合には、そのまま当該横方向操作検出処理を終了するが、シフトレバー18が縦方向の原点にあると判定した場合には、S121に進む。
【0074】
S121では、シフトセンサ21を成す横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18の横方向位置(即ち、シフトゲージ19における横方向溝での位置)が、N位置と原点位置と不定位置との何れであるかを判定する。具体的には、横方向センサ21bの出力電圧Vhが、シフトレバー18がN位置にあると考えられる電圧範囲ehnと、シフトレバー18が横方向の原点にあると考えられる電圧範囲eh0と、シフトレバー18が不定位置にあると考えられる電圧範囲eh1との、何れに入っているか否かを判定する(図2参照)。
【0075】
そして、このS121にて、シフトレバー18の横方向位置がN位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、N位置に該当する電圧範囲ehnに入っていると判定した場合)には、S131に進み、N位置時間カウンタをインクリメントする。このN位置時間カウンタは、シフトレバー18がN位置に停滞している継続時間を計測するためのカウンタである。
【0076】
次にS141にて、シフトレバー18が横方向の不定位置にあったことを示す不定位置フラグを0にクリアする。尚、この図4の処理で読み書き(リード/ライト)される不定位置フラグは、図3の処理で読み書きされる不定位置フラグとは別のフラグである。
【0077】
次にS161にて、N位置時間カウンタの値に基づき、シフトレバー18がN位置に一定時間Ta以上継続して停滞しているか否かを判定する。そして、シフトレバー18がN位置に一定時間Ta以上停滞していないと判定した場合には(S161:NO)、そのまま当該横方向操作検出処理を終了するが、シフトレバー18がN位置に一定時間Ta以上停滞していると判定した場合には(S161:YES)、S171に進む。
【0078】
S171では、シフトレバー18がN位置に操作されたと判定して、そのことを示すN位置確定フラグに1をセットする。そして、その後、当該横方向操作検出処理を終了する。
【0079】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、N位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“N”へと切り替える。
【0080】
また、上記S121にて、シフトレバー18の横方向位置が不定位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、不定位置に該当する電圧範囲eh1に入っていると判定した場合)には、S231に進み、不定位置フラグに1をセットする。そして、続くS241にて、N位置時間カウンタを0にクリアし、その後、当該横方向操作検出処理を終了する。
【0081】
また、上記S121にて、シフトレバー18の横方向位置が原点位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、原点位置に該当する電圧範囲eh0に入っていると判定した場合)には、S251に進み、N位置時間カウンタを0にクリアする。
【0082】
次にS261にて、不定位置フラグが1であるか否かを判定し、不定位置フラグが1であれば、次のS271にて、その不定位置フラグを0にリセットする。尚、この場合は、シフトレバー18が横方向の不定位置から原点位置に戻った直後である。
【0083】
そして、次のS281にて、N位置確定フラグが1であるか否かを判定し、N位置確定フラグが1であれば、次のS291にて、そのN位置確定フラグを0にクリアする。そして、その後、当該横方向操作検出処理を終了する。
【0084】
このため、S171でシフトレバー18がN位置まで操作されたと判定された後、シフトレバーが、そのN位置から不定位置を通って原点位置に戻った場合には、上記S251〜S291の処理が行われることとなる。
【0085】
一方、上記S281にて、N位置確定フラグが1ではないと判定した場合には、シフトレバー18が原点位置から横方向の不定位置に移動した後、上記S171で当該シフトレバー18がN位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなシフトレバー18への中途半端な操作であるビジーシフトが行われたと判断して、S301に移行する。そして、そのS301では、図3のS300と同様の処理を行い、その後、当該横方向操作検出処理を終了する。
【0086】
また、上記S261で不定位置フラグが1ではないと判定した場合には、前回の処理時にもシフトレバー18が原点位置にあったということであるため、そのまま当該横方向操作検出処理を終了する。
【0087】
次に、以上のようなSBWECU1の作用について、シフトレバー18がR位置の方向に操作された場合を例に挙げて説明する。尚、シフトレバー18がD位置又はN位置の方向に操作された場合も同様であるため、説明は省略する。
【0088】
運転者が、シフトレバー18を、原点位置からR位置の方向に動かして、そのR位置に一定時間Ta以上保持したならば、SBWECU1のマイコン6は、図3におけるS170の処理により、シフトレバー18がR位置に操作されたと判定して、自動変速機2のシフトレンジを“R”に切り替えることとなる。
【0089】
一方、図2に示すパターン(1)のように、シフトレバー18が原点位置からR位置側の不定位置(不定領域)まで移動した後、R位置へ至ることなく原点位置に戻ったとすると、マイコン6は、図3におけるS260で“NO”と判定する状態から、S230,S240の処理を行う状態となり、その後、S130〜S170の処理もS180〜S220の処理も行うことなく、シフトレバー18が原点位置に戻った際に、S250〜S280の処理を行うこととなる。そして、その場合、マイコン6は、S280にて“NO”と判定、即ち、ビジーシフトが行われたと判定し、S300にてビジーシフト判定時の処理(運転者への警告と履歴情報の記憶)を行うこととなる。
【0090】
このため、運転者がシフトレバー18を原点位置からR位置へ向けて操作したものの、シフトレバー18がR位置に到達する前に、シフトレバー18から手を放してしまった場合に、そのような操作を、ビジーシフトとして検出することができる。
【0091】
また、図2に示すパターン(2)のように、シフトレバー18が原点位置からR位置まで移動したが、一定時間Taが経過する前に、そのR位置から離脱して原点位置に戻ったとすると、マイコン6は、図3におけるS260で“NO”と判定する状態から、S230,S240の処理を行う状態となり、その後、S130〜S160の処理を行う状態となるが、S170の処理を行うことなく、S230,S240の処理を行う状態に戻り、シフトレバー18が原点位置に戻った際に、S250〜S280の処理を行うこととなる。そして、その場合にも、マイコン6は、S280にて“NO”と判定、即ち、ビジーシフトが行われたと判定し、S300にてビジーシフト判定時の処理を行うこととなる。
【0092】
このため、運転者がシフトレバー18を原点位置からR位置まで操作したものの、シフトレバー18から手を放すのが早すぎて、シフトレバー18のR位置での停滞時間が、操作有りと認識される一定時間Taよりも短かった場合に、そのような操作を、ビジーシフトとして検出することができる。
【0093】
このようなSBWECU1によれば、運転者が意志を持ってシフトレバー18を操作したものの、その操作が雑で不十分なことから、シフトレバー18がシフト位置に操作されたとは当該ECU1に認知されずに、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのようなシフトレバー18に対する不十分な操作を、ビジーシフト(中途半端な操作)として検出することができる。
【0094】
そして、そのビジーシフトの検出時には、運転者に音や表示での警告が行われるため、今回のシフトレバー18の操作が無効であることを運転者に知らせることができ、その結果、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。
【0095】
また、ビジーシフトの検出時には、EEPROM7に履歴情報が記憶されるため、仮に、運転者が、ビジーシフトに起因した勘違い(即ち、シフトレバー18を操作してシフトレンジを切り替えたつもりが、その操作が不十分でシフトレンジが切り替わらなかったという勘違い)により車両を逆走させたりオーバーランさせたりして事故が起こった場合に、調査者は、前述の診断装置によりEEPROM7内の履歴情報を読み出すことで、その事故の原因を容易に特定することができるようになる。つまり、その事故が運転者の誤操作(即ち、ビジーシフト)によるものであったことを証明することができるようになる。また特に、履歴情報に含まれる時間情報、車両の走行距離、及び車両の位置情報により、運転者がビジーシフトをいつどこで行ったかを容易に調べることができ、事故の原因を調査し証明する際に有効である。
【0096】
尚、上記実施形態では、シフトレバー18が何れかのシフト位置に一定時間Ta以上保持されて始めて、そのシフト位置への操作を確定判定するようになっていたが、一定時間Taを0にし、シフトセンサ21からの電圧のみで、シフトレバー18のシフト位置への操作を確定判定するように構成しても良い。
【0097】
この場合、図3のS130,S150,S160,S180,S200,S210,S240,S250と、図4のS131,S161,S241,S251の各処理を削除することができる。そして、図2に示したパターン(1),(2)のうち、パターン(1)の操作だけがビジーシフトとして検出されることとなる。
【0098】
一方、上記実施形態では、シフトレバー18が操作部に相当し、“R”,“D”,“N”の各シフト位置が操作確定位置に相当している。また、シフトセンサ21が検出器に相当している。そして、図3のS110〜S130,S150〜S180,S200〜S220,S240,S250と、図4のS111〜S131,S161,S171,S241,S251が、操作判定手段に相当し、図3のS140,S190,S230,S260〜S290と、図4のS141,S231,S261〜S291が、中途半端操作検出手段に相当している。そして更に、図3のS300と図4のS301が、警告手段及び履歴記憶手段に相当している。
[第2実施形態]
次に、第2実施形態のSBWECUについて説明する。尚、符号としては、第1実施形態と同じものを用いる。そして、第1実施形態と相違する点のみ説明する。
【0099】
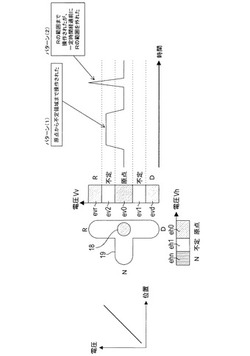
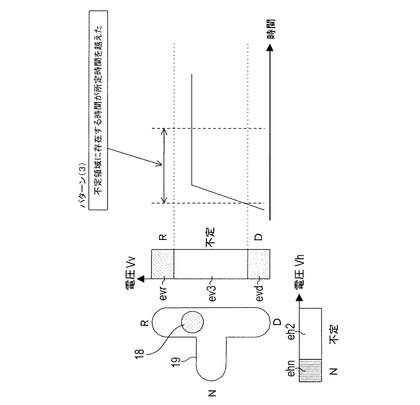
まず、シフトレバー18が、モーメンタリ型ではなく、オルタネート型になっている。
即ち、図5に示すように、第2実施形態のシフトレバー18には、第1実施形態のような原点位置がなく、そのシフトレバー18は、力が加えられることで、前述した“R”,“D”,“N”の各シフト位置に移動すると共に、力が取り除かれてもその位置が変わらない。また、原点位置がないため、シフトゲージ19の縦方向溝において、D位置とR位置との間の部分は全て不定位置になっており、同様に、シフトゲージ19の横方向溝において、N位置以外の部分は全て不定位置になっている。
【0100】
尚、図5において、ev3は、図2に示したev0,ev1,ev2の各電圧範囲を合わせた電圧範囲であり、シフトレバー18が縦方向の不定位置にあると考えられる縦方向センサ21aの出力電圧Vvの電圧範囲である。同様に、eh2は、図2に示したeh0,eh1の各電圧範囲を合わせた電圧範囲であり、シフトレバー18が横方向の不定位置にあると考えられる横方向センサ21bの出力電圧Vhの電圧範囲である。
【0101】
そして、本第2実施形態においても、SBWECU1のマイコン6は、シフトセンサ21(縦方向センサ21a及び横方向センサ21b)からの信号により、シフトレバー18が“N”,“D”,“R”の何れかのシフト位置に操作されたことを判定するが、その判定処理は、下記の処理である。
【0102】
まず、シフトレバー18がD位置とR位置に操作されたことを判定するための判定処理は、図3におけるS120,S130,S150〜S180,S200〜S220,S240からなる処理と同じ処理である。但し、S120では、縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18の縦方向位置が、R位置とD位置と不定位置との何れであるかを判定する。
【0103】
そして、シフトレバー18がN位置に操作されたことを判定するための判定処理は、図4におけるS121,S131,S161,S171,S241からなる処理と同じ処理である。但し、S121では、横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18の横方向位置が、N位置と不定位置との何れであるかを判定する。
【0104】
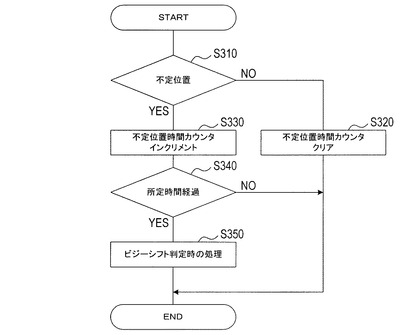
そして更に、本第2実施形態において、SBWECU1のマイコン6は、ビジーシフトを検出するための処理として、図6のビジーシフト検出処理を実行する。尚、図6の処理は、予め定められた一定の時間毎に繰り返し実行される。
【0105】
図6に示すように、マイコン6がビジーシフト検出処理の実行を開始すると、まずS310にて、シフトセンサ21を成す縦方向センサ21a及び横方向センサ21bからの信号に基づいて、シフトレバー18が不定位置にあるか否かを判定する。
【0106】
具体的には、縦方向センサ21aの出力電圧Vvが、不定位置に該当する電圧範囲ev3に入っており、且つ、横方向センサ21bの出力電圧Vhも、不定位置に該当する電圧範囲eh2に入っているか否か判定する。また、縦方向センサ21aの出力電圧Vvが、D位置とR位置に該当する電圧範囲evd,evrに入っておらず、且つ、横方向センサ21bの出力電圧Vhも、N位置に該当する電圧範囲ehnに入っていないかどうかを判定するようにしても良い。
【0107】
そして、シフトレバー18が不定位置にないと判定した場合には、S320に進んで、不定位置時間カウンタを0にクリアし、その後、当該ビジーシフト検出処理を終了する。尚、不定位置時間カウンタは、シフトレバー18が不定位置に停滞している継続時間を計測するためのカウンタである。
【0108】
一方、上記S310にて、シフトレバー18が不定位置にあると判定した場合には、S330に移行して、不定位置時間カウンタをインクリメントする。
次にS340にて、不定位置時間カウンタの値に基づき、シフトレバー18が不定位置に所定時間Tb以上停滞しているか否かを判定する。具体的には、不定位置時間カウンタの値が、その所定時間Tbに相当する値以上になったか否かを判定する。尚、所定時間Tbは、シフトレバー18を普通に操作して、各シフト位置間を移動させるのに要する時間よりも、長い時間に設定されている。
【0109】
そして、シフトレバー18が不定位置に所定時間Tb以上停滞していないと判定した場合には(S340:NO)、そのまま当該ビジーシフト検出処理を終了するが、シフトレバー18が不定位置に所定時間Tb以上停滞していると判定した場合には(S340:YES)、ビジーシフトが行われたと判断して、S350に進む。
【0110】
S350では、図3のS300と同様のビジーシフト判定時の処理(運転者への警告と履歴情報の記憶)を行い、その後、当該ビジーシフト検出処理を終了する。
このような第2実施形態のSBWECU1では、図5に示すパターン(3)のように、シフトレバー18が不定位置(不定領域)に存在する時間が所定時間Tbを超えると、マイコン6が、図6のS340にて“YES”と判定、即ち、ビジーシフトが行われたと判定することとなる。
【0111】
よって、運転者が意志を持ってシフトレバー18を操作したものの、その操作が不十分でシフトレバー18が不定位置で止まってしまい、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのようなシフトレバー18に対する不十分な操作を、ビジーシフト(中途半端な操作)として検出することができる。つまり、運転者がシフトレバー18を何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、シフトレバー18が目的のシフト位置へ至る途中の不定位置にある段階でシフトレバー18から手を放してしまった、という操作を行った場合、その操作がビジーシフトとして検出される。
【0112】
そして、本第2実施形態においても、ビジーシフトの検出時には、S350の処理により、運転者に音や表示での警告が行われると共に、EEPROM7に履歴情報が記憶されるため、第1実施形態について述べたのと同じ効果が得られる。つまり、今回のシフトレバー18の操作が無効であることを運転者に知らせることができ、また、仮に運転者が、ビジーシフトに起因した勘違いにより事故を起こした場合に、その事故の原因を容易に特定することができるようになる。
【0113】
以上、本発明の一実施形態について説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。
[他の実施形態]
例えば、上記各実施形態SBWECU1において、Pスイッチ22についても、シフトレバー18に対するビジーシフトと同様の中途半端な操作を検出するように構成しても良い。
【0114】
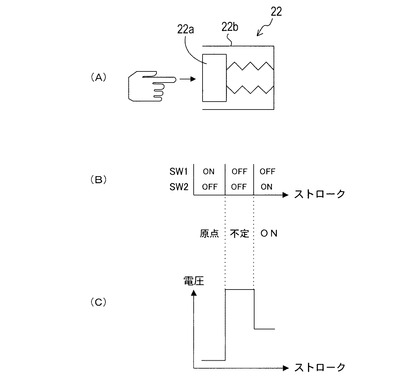
具体的に説明すると、まず図7(A)に示すように、Pスイッチ22は、人の手によって押されるボタン部22aと、そのボタン部22aを摺動可能に保持する筐体22bとを有しているが、図7(B)に示すように、筐体22b内でのボタン部22aの位置(ストローク量)に応じた組み合わせでオン/オフする複数の位置検出用スイッチを設ける。
【0115】
この例では、2つの位置検出用スイッチSW1,SW2を設けている。そして、ボタン部22aが無操作状態の原点位置にある場合に、スイッチSW1がオンでスイッチSW2がオフし、ボタン部22aが原点位置から操作確定位置としてのオン位置に至る途中の不定位置にある場合に、スイッチSW1,SW2が両方共にオフし、ボタン部22aがオン位置にある場合に、スイッチSW1がオフでスイッチSW2がオンするようになっている。尚、Pスイッチ22について中途半端な操作を検出しないのであれば、スイッチSW1は不要でスイッチSW2だけを設けた構成となる。
【0116】
そして、SBWECU1のマイコン6は、Pスイッチ22に対する操作を検出するためのPスイッチ操作検出処理として、図4におけるS121〜S301からなる処理を下記(a),(b)のように変更した処理を、一定の時間毎に繰り返し実行すれば良い。
【0117】
(a)S121では、シフトレバー18の横方向位置ではなく、ボタン部22aの筐体22b内での位置が、原点位置と不定位置とオン位置との何れであるかを、上記位置検出用スイッチSW1,SW2のオン/オフ状態の組み合わせに基づき判定する。
【0118】
(b)そして、そのS121にて、ボタン部22aがオン位置であると判定した場合には、S131へ進む。
但し、この処理の場合、N位置時間カウンタは、ボタン部22aがオン位置に停滞している継続時間を計測するためのカウンタ(オン位置時間カウンタ)となり、N位置確定フラグは、ボタン部22aがオン位置に操作されたことを示すフラグ(オン位置確定フラグ)となる。そして、S281にて、N位置確定フラグが1ではないと判定した場合には、ボタン部22aが原点位置から不定位置に移動した後、S171で当該ボタン部22aがオン位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなボタン部22aへの中途半端な操作が行われたと判断することとなる。
【0119】
以上のように構成すれば、運転者がPスイッチ22のボタン部22aを押したものの、そのボタン部22aから手を放すのが早かったことから、Pスイッチ22が操作されたとは当該SBWECU1に認知されずに、シフトレンジの“P”への切り替えが実施されない、という事態が発生した場合に、そのようなPスイッチ22に対する不十分な操作を検出して、運転者に警告したり履歴情報を記憶したりすることができる。
【0120】
また、ボタン部22aの位置が原点位置と不定位置とオン位置との何れであるかを判別するためのセンサとしては、上記のような複数のスイッチSW1,SW2に限らず、例えば図7(C)に示すように、ボタン部22aの位置に応じて出力電圧が3通りに変化するものでも良く、また、ボタン部22aの原点位置からのストローク量に応じて出力電圧が増加していくようなセンサでも良い。
【0121】
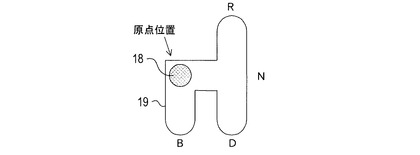
一方、上記第1実施形態SBWECU1において、シフトレバー18の移動パターン(換言すれば、シフトゲージ19の形状)は、図2のものに限らず、例えば図8のようなものでも良い。尚、図8において、“B”は、“D”と同様に車両を前進させるが“D”よりもエンジンブレーキが良く効くブレーキレンジのシフト位置である。また、図8のパターンでは、シフトレバー18が原点位置からR位置又はD位置へ操作される際に、N位置を経由することとなるため、シフトレバー18がN位置に操作されたと判定するための判定時間(前述のTa)を、他のシフト位置に関する判定時間よりも長くしておけば良い。
【0122】
また同様に、第2実施形態についても、シフトレバー18の移動パターンは、図5に示したもの以外でも良い。
【図面の簡単な説明】
【0123】
【図1】実施形態のシフト・バイ・ワイヤECU(SBWECU)と、それの周辺装置とを表す構成図である。
【図2】シフトレバー、シフトゲージ及びシフトセンサを説明する説明図である。
【図3】縦方向操作検出処理を表すフローチャートである。
【図4】横方向操作検出処理を表すフローチャートである。
【図5】第2実施形態のシフトレバー及びSBWECUの作用を説明する説明図である。
【図6】第2実施形態のビジーシフト検出処理を表すフローチャートである。
【図7】他の実施形態を説明する第1の説明図である。
【図8】他の実施形態を説明する第2の説明図である。
【符号の説明】
【0124】
1…SBWECU(シフト・バイ・ワイヤECU)、2…自動変速機、6…マイコン、7…EEPROM、8…シフトレンジ切替機構、11…ECTECU、12…ナビECU、13…メータECU、18…シフトレバー、19…シフトゲージ、21…シフトセンサ、21a…縦方向センサ、21b…横方向センサ、22…Pスイッチ、22a…ボタン部、22b…筐体、24…モータ
【技術分野】
【0001】
本発明は、自動変速機のシフトレンジをモータ等からなるアクチュエータを介して切り替える自動変速機のシフトレンジ切替制御装置に関する。
【背景技術】
【0002】
運転者によるシフトレバーの操作に従い自動変速機のシフトレンジを切り替える装置として、直流モータ等のアクチュエータを駆動することで自動変速機のシフトレンジ切替機構を作動させるシフト・バイ・ワイヤ方式のものが知られている。つまり、シフト・バイ・ワイヤ方式でシフトレンジを切り替えるシフトレンジ切替制御装置では、シフトレバーが操作されたシフト位置を電気的に検出し、自動変速機のシフトレンジが、その検出したシフト位置に対応するシフトレンジとなるように、アクチュエータを駆動する。そして、この種のシフトレンジ切替制御装置によれば、自動変速機のシフトレンジを運転者によるシフトレバーの操作力によって直接切り替える旧来方式のように、シフトレバーとシフトレンジ切替機構とを機械的に接続する必要がないことから、車両に搭載する際のレイアウト上の制限がない等の利点がある(例えば、特許文献1,2参照)。
【0003】
また、シフト・バイ・ワイヤ方式では、シフトレンジを切り替えるために操作されるシフトレバー等の操作部の形式として、モーメンタリ型(自動復帰型とも呼ばれる)と、オルタネート型(位置保持型とも呼ばれる)とがある。
【0004】
モーメンタリ型の操作部は、力が加えられることで原点位置から何れかの操作確定位置に移動し、力が取り除かれると自動的に原点位置へ戻るタイプのものである(例えば、特許文献2参照)。
【0005】
オルタネート型の操作部は、力が加えられることで、何れかの操作確定位置から他の操作確定位置へと移動し、力が取り除かれてもその位置が変わらないタイプのものであり、旧来方式のシフトレンジ切替システムでも用いられている。
【0006】
ここで、従来より、シフト・バイ・ワイヤ方式のシフトレンジ切替制御装置においては、シフトレバーの操作状態をCCDカメラで撮影し、その撮影映像に基づいて、シフトレバーが運転者以外の人によって操作されたこと等、運転者の意志に反して操作されたことを検知した場合には、そのシフトレバーの操作を無効化する、といった技術が提案されている(例えば、特許文献2参照)。
【0007】
また例えば、運転者がブレーキを踏まずにシフトレバーをドライブ(D)又はリバース(R)のシフト位置に操作したことを検知した場合には、その操作を受け付けずに無効化する、といった技術も知られている。
【特許文献1】特開2000−170905号公報
【特許文献2】特開2002−254941号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記従来の技術は、運転者の意志に反した操作や、複数の操作の組み合わせによる明らかな誤操作を検出するものであり、運転者が意志を持って操作部を操作したものの、その操作が中途半端でシフトレンジ切替制御装置に認識されない、という事態を検出するものではない。
【0009】
こうした中途半端な操作としては、例えば、操作部としてのシフトレバーがモーメンタリ型であるとすると、運転者がシフトレバーを原点位置から何れかのシフト位置へ向けて操作したものの、シフトレバーが目的のシフト位置に到達する前に、シフトレバーから手を放してしまったり、シフトレバーが目的のシフト位置に到達したとしても、シフトレンジ切替制御装置がそのことを認識するよりも前に、シフトレバーから手を放してしまった、という操作が考えられる。
【0010】
また例えば、操作部としてのシフトレバーがオルタネート型であるとすると、運転者がシフトレバーを何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、シフトレバーが何れかシフト位置から目的のシフト位置へ至る途中の不定位置にある段階で、シフトレバーから手を放してしまった、という操作が考えられる。この場合、シフトレバーの位置は何れのシフト位置でもない不定位置となり、シフトレンジ切替制御装置はシフトレバーが操作されたことを認識しない。
【0011】
そして、上記のような中途半端な操作が行われた場合、運転者はシフトレバーを操作したつもりであるのに対して、シフトレンジ切替制御装置はシフトレバーの操作を認識せずにシフトレンジの切り替えを実施しないため、運転者が自分の予期しない方向に車両を動かしてしまったりする可能性がある。
【0012】
そこで、本発明は、シフト・バイ・ワイヤ方式のシフトレンジ切替制御装置において、シフトレンジ切替用の操作部に対する中途半端な操作を検知して、運転者への警告などを行えるようにすることを目的としている。
【課題を解決するための手段】
【0013】
請求項1のシフトレンジ切替制御装置は、車両に搭載された自動変速機のシフトレンジを切り替えるために操作されるモーメンタリ型の操作部が、原点位置から操作確定位置まで操作されたか否かを判定する操作判定手段を備えている。尚、操作確定位置とは、何れかのシフトレンジに対応して設定された操作位置のことである。
【0014】
そして、このシフトレンジ切替制御装置は、操作判定手段により操作部が操作確定位置まで操作されたと判定されると、アクチュエータを駆動することにより、自動変速機のシフトレンジを前記判定された操作確定位置に対応するレンジへと切り替える。
【0015】
ここで特に、請求項1のシフトレンジ切替制御装置は、中途半端操作検出手段を備えている。
その中途半端操作検出手段は、操作部の位置を検出する検出器からの位置検出信号であって、操作部が、原点位置と、操作確定位置と、原点位置から操作確定位置へ至る途中の位置(即ち、原点位置でも操作確定位置でもない不定位置)との、何れにあるかを識別可能な位置検出信号を参照する。そして、中途半端操作検出手段は、その検出器からの位置検出信号に基づいて、操作部が、原点位置から不定位置に移動した後、操作判定手段により該操作部が操作確定位置まで操作されたと判定されることなく原点位置に戻ったことを、操作部への中途半端な操作として検出する。
【0016】
このようなシフトレンジ切替制御装置によれば、運転者が意志を持って操作部を操作したものの、その操作が不十分であることから、操作判定手段により操作部が操作確定位置まで操作されたとは判定されずに、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのような操作部に対する不十分な操作を、中途半端な操作として検出することができる。
【0017】
よって、例えば請求項5に記載の如く、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、車両の運転者に対して警告する処理を行う警告手段を設ければ、操作部に対する操作が当該シフトレンジ切替制御装置に受け付けられていないこと(換言すれば、その操作が無効であること)を運転者に知らせることができ、延いては、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。尚、警告手段が行う処理としては、例えば、今回の操作部への操作が無効であることを、車室内の表示部に表示させたり音で知らせる、といった処理が考えられる。
【0018】
ところで、中途半端操作検出手段は、請求項2に記載のように、操作部が、原点位置から不定位置に移動した後、操作確定位置へ至ることなく原点位置に戻ったことを、操作部への中途半端な操作として検出するように構成することができる。
【0019】
このように構成すれば、運転者が操作部を原点位置から操作確定位置へ向けて操作したものの、操作部が目的の操作確定位置に到達する前に、操作部から手を放してしまった場合に、そのような操作を、中途半端な操作として検出することができる。
【0020】
また、操作判定手段が、「操作部が一定時間Ta以上継続して操作確定位置に停滞したか否かを判定し、その判定で肯定判定した場合に、操作部が操作確定位置まで操作されたと判定する」という停滞時間条件付きの判定を行うようになっているならば、中途半端操作検出手段は、請求項3に記載のように構成することができる。即ち、中途半端操作検出手段は、操作部が、操作確定位置に至ってから上記一定時間Taが経過する前に該操作確定位置から離脱して原点位置に戻ったことを、操作部への中途半端な操作として検出するように構成すれば良い。
【0021】
このように構成すれば、運転者が操作部を原点位置から操作確定位置まで操作したものの、操作部から手を放すのが早すぎて、操作部の操作確定位置での停滞時間が上記一定時間Ta未満であった場合に、そのような操作を、中途半端な操作として検出することができる。
【0022】
尚、操作判定手段が、上記の停滞時間条件付きの判定を行うようになっている場合、中途半端操作検出手段は、操作部が、原点位置から不定位置に移動した後、操作確定位置へ至ることなく原点位置に戻ったことと、操作部が、操作確定位置に至ってから上記一定時間Taが経過する前に該操作確定位置から離脱して原点位置に戻ったこととの、それぞれを、操作部への中途半端な操作として検出するように構成するのが好ましい。それは、請求項2に従属する請求項3の構成である。
【0023】
一方、請求項4のシフトレンジ切替制御装置は、車両に搭載された自動変速機のシフトレンジを複数通りのシフトレンジの何れかに切り替えるために操作される操作部が、複数通りのシフトレンジの何れかに対応したシフト位置に操作されたことを検出すると、アクチュエータを駆動することにより、自動変速機のシフトレンジを前記検出したシフト位置に対応するシフトレンジへと切り替える。
【0024】
そして特に、請求項4のシフトレンジ切替制御装置は、以下のような中途半端操作検出手段を備えている。
その中途半端操作検出手段は、操作部の位置を検出する検出器からの位置検出信号であって、操作部が、何れかのシフトレンジに対応したシフト位置から他のシフトレンジに対応したシフト位置へ至る途中の位置(即ち、シフト位置間の不定位置)にあることを識別可能な位置検出信号を参照する。そして、中途半端操作検出手段は、その検出器からの位置検出信号に基づいて、操作部が、前記不定位置に所定時間以上停滞していることを、操作部への中途半端な操作として検出する。
【0025】
このようなシフトレンジ切替制御装置によれば、運転者が意志を持って操作部を操作したものの、その操作が不十分で操作部が不定位置で止まってしまい、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのような操作部に対する不十分な操作を、中途半端な操作として検出することができる。つまり、運転者が操作部を何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、操作部が目的のシフト位置へ至る途中の不定位置にある段階で操作部から手を放してしまった、という操作を行った場合、その操作が中途半端な操作として検出される。
【0026】
そして、この請求項4のシフトレンジ切替制御装置においても、例えば請求項5に記載の如く、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、車両の運転者に対して警告する処理を行う警告手段を設ければ、操作部に対する操作が当該シフトレンジ切替制御装置に受け付けられていないこと(換言すれば、その操作が無効であること)を運転者に知らせることができ、延いては、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。
【0027】
次に、請求項6のシフトレンジ切替制御装置では、請求項1〜5のシフトレンジ切替制御装置において、履歴記録手段を備えている。そして、その履歴記録手段は、中途半端操作検出手段が操作部への中途半端な操作を検出した場合に、そのことを示す履歴情報を記憶手段に書き込む。
【0028】
このようなシフトレンジ切替制御装置によれば、記憶手段から履歴情報を読み出すことで、操作部への中途半端な操作が行われたか否かを調査できるようになる。このため、例えば、運転者が、操作部への中途半端な操作に起因した勘違い(即ち、操作部を操作してシフトレンジを切り替えたつもりが、その操作が不十分でシフトレンジが切り替わらなかったという勘違い)により車両を逆走させたりオーバーランさせたりして事故が起こった場合に、その事故が運転者の誤操作(即ち、中途半端な操作)によるものであったことを証明することができるようになる。
【0029】
尚、記憶手段としては、EEPROMやフラッシュメモリ等のデータ書き替え可能な不揮発性メモリ、又は電源バックアップされた揮発性メモリを用いることができる。
また、請求項1〜3のシフトレンジ切替制御装置において、操作部の操作確定位置が複数ある場合、履歴情報としては、操作部が原点位置から向かった操作確定位置がどれであるか(換言すれば、操作部が動かされた方向)を示す情報を含むようにすることが好ましい。同様に、請求項4のシフトレンジ切替制御装置においても、履歴情報としては、操作部が向かったシフト位置がどれであるかを示す情報を含むようにすることが好ましい。
【0030】
また更に、請求項7に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの時間も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた時間を基にして、運転者が操作部への中途半端な操作をいつ行ったかを調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【0031】
また、請求項8に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの車両の走行距離も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた走行距離を基にして、運転者が操作部への中途半端な操作を行った時期を調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【0032】
また、請求項9に記載のように、履歴記録手段が、履歴情報として、中途半端操作検出手段が操作部への中途半端な操作を検出したときの車両の位置情報も記憶手段に書き込むように構成すれば、その記憶手段に書き込まれた位置情報を基にして、運転者が操作部への中途半端な操作を行った場所を調べることができ、例えば前述したような事故の原因を調査し証明する際に有利である。
【発明を実施するための最良の形態】
【0033】
以下に、本発明が適用された実施形態について説明する。
[第1実施形態]
まず図1は、シフトレンジ切替制御装置としてのシフト・バイ・ワイヤECU(以下、SBWECUという)1と、それの周辺装置とを表す構成図である。
【0034】
尚、ECUとは、電子制御装置のことである。そして、SBWECU1は、車両に搭載された自動変速機2のシフトレンジを、複数通りの各種レンジであって、本実施形態では、パーキングロック(P),ニュートラル(N),前に自走可能なドライブ(D),後に自走可能なリバース(R)の何れかに、シフト・バイ・ワイヤ方式で切り替える制御を行うECUである。また、以下の説明においては、パーキングロック,ニュートラル,ドライブ,リバースの各々を、単にP,N,D,Rと記載する。
【0035】
SBWECU1は、CPU3、ROM4及びRAM5などを有した周知のマイコン6と、記憶内容が電気的に書き替え可能な不揮発性メモリであるEEPROM7とを備えている。
【0036】
また、SBWECU1には、ECTECU11と、ナビECU12と、メータECU13と、シフトセンサ21と、Pスイッチ22と、自動変速機2のシフトレンジ切替機構8を作動させる動力源としてのアクチュエータ(本実施形態ではモータ)24とが接続されている。
【0037】
ECTECU11は、自動変速機2のシフトレンジが“D”になっている場合に、自動変速機2の内部に設けられている変速用ソレノイドを駆動することにより、その自動変速機2の変速段を制御する。
【0038】
ナビECU12は、車両のナビゲーション装置を制御するECUである。
メータECU13は、車両のインストルメントパネル内の表示機器等を制御するECUであり、例えば、上記表示機器に、車速、エンジン回転数、水温、自動変速機2の現在のシフトレンジなどを表示させる。
【0039】
シフトセンサ21は、車両の運転席に設けられたシフトレンジ切替用操作部としてのシフトレバー18が何れのシフト位置に操作されたかを検知するためのセンサである。
ここで、図2に示すように、本実施形態において、シフトレバー18は、Tの字を横向きにした形のシフトゲージ19内に移動可能に立設され、そのシフトゲージ19に沿って“P”以外の各シフトレンジ(N,D,R)に対応したシフト位置に操作されるモーメンタリ型のシフトレバーである。
【0040】
具体的に説明すると、シフトレバー18が移動するシフトゲージ19は、縦方向溝と、その縦方向溝の中心位置から横方向に伸びた横方向溝とからなる。そして、縦方向溝の中心位置で且つ横方向溝の図2における右端位置が、シフトレバー18の原点位置となっている。そして更に、縦方向溝の図2における上端位置が“R”のシフト位置(以下、R位置ともいう)で、縦方向溝の図2における下端位置が“D”のシフト位置(以下、D位置ともいう)で、横方向溝の図2における左端位置が“N”のシフト位置(以下、N位置ともいう)となっている。また、原点位置からD位置へ至る途中の位置と、原点位置からR位置へ至る途中の位置と、原点位置からN位置へ至る途中の位置は、それぞれ、原点位置でもシフト位置でもない不定位置になっている。
【0041】
そして、シフトセンサ21は、シフトレバー18の縦方向の位置に応じた電圧を出力する縦方向センサ21aと、シフトレバー18の横方向の位置に応じた電圧を出力する横方向センサ21bとからなる。そして更に、図2に示すように、縦方向センサ21aの出力電圧Vvは、シフトレバー18がD位置から遠ざかるほど(つまり、R位置の方向へ移動するほど)大きくなり、横方向センサ21bの出力電圧Vhは、シフトレバー18がN位置から遠ざかるほど(つまり、原点位置の方向へ移動するほど)大きくなる。
【0042】
尚、シフトレバー18がシフトゲージ19における縦方向溝の何れかの位置にある場合、そのシフトレバー18は、横方向については原点にあることになるため、横方向センサ21bの出力電圧Vhは最大となる。また、シフトレバー18がシフトゲージ19における横方向溝の何れかの位置にある場合、そのシフトレバー18は、縦方向については原点にあることになるため、縦方向センサ21aの出力電圧Vvは、最大値と最小値との中間値(即ち、D位置での電圧とR位置での電圧との中間値)となる。一方、こうしたシフトセンサ21(縦方向センサ21a及び横方向センサ21b)は、例えば、シフトレバー18の位置に応じて2つの抵抗素子の抵抗値比率が変化するポテンショメータによって構成することができる。
【0043】
Pスイッチ22は、自動変速機2のシフトレンジを“P”に切り替えるために操作されるプッシュ式のスイッチであり、押されることで、SBWECU1へ、そのPスイッチ22が操作されたことを示す信号を出力する。
【0044】
シフトレンジ切替機構8は、モータ24の動力により、自動変速機2のシフトレンジを“P”,“N”,“D”,“R”の各レンジに切り替えるものであり、例えば前述した特許文献1等に記載されているような周知のものである。
【0045】
そして、本実施形態のSBWECU1は、Pスイッチ22からの信号により、そのPスイッチ22が押されたことを検知すると、モータ24を駆動してシフトレンジ切替機構8を作動させることにより、自動変速機2のシフトレンジを“P”に切り替え、また、シフトセンサ21からの信号により、シフトレバー18が原点位置から“N”,“D”,“R”の何れかのシフト位置に操作されたと判定すると、モータ24を駆動してシフトレンジ切替機構8を作動させることにより、自動変速機2のシフトレンジを、その判定したシフト位置に対応するレンジへと切り替える。尚、こうしたSBWECU1の動作は、マイコン6によって行われるものである。
【0046】
そこで次に、SBWECU1のマイコン6が、シフトレバー18に対する縦方向の操作を検出するために実行する縦方向操作検出処理について、図3を用い説明する。尚、この縦方向操作検出処理は、予め定められた一定の時間毎に繰り返し実行される定期処理である。
【0047】
図3に示すように、マイコン6が縦方向操作検出処理の実行を開始すると、まずS110にて、シフトセンサ21を成す横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18が横方向の原点にあるか否か(換言すれば、シフトレバー18がシフトゲージ19における縦方向溝内にあるか否か)を判定する。具体的には、横方向センサ21bの出力電圧Vhが、シフトレバー18が横方向の原点にあると考えられる電圧範囲eh0に入っているか否かを判定する(図2参照)。
【0048】
そして、シフトレバー18が横方向の原点にないと判定した場合には、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18が横方向の原点にあると判定した場合には、S120に進む。
【0049】
S120では、シフトセンサ21を成す縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18の縦方向位置(即ち、シフトゲージ19における縦方向溝での位置)が、R位置とD位置と原点位置と不定位置との何れであるかを判定する。具体的には、縦方向センサ21aの出力電圧Vvが、シフトレバー18がR位置にあると考えられる電圧範囲evrと、シフトレバー18がD位置にあると考えられる電圧範囲evdと、シフトレバー18が縦方向の原点にあると考えられる電圧範囲ev0と、シフトレバー18が不定位置にあると考えられる各電圧範囲ev1,ev2との、何れに入っているか否かを判定する(図2参照)。
【0050】
そして、このS120にて、シフトレバー18の縦方向位置がR位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、R位置に該当する電圧範囲evrに入っていると判定した場合)には、S130に進み、R位置時間カウンタをインクリメントする。このR位置時間カウンタは、シフトレバー18がR位置に停滞している継続時間を計測するためのカウンタである。
【0051】
次にS140にて、シフトレバー18が不定位置にあったことを示す不定位置フラグを0にクリアし、続くS150にて、D位置時間カウンタを0にクリアする。このD位置時間カウンタは、シフトレバー18がD位置に停滞している継続時間を計測するためのカウンタである。
【0052】
次にS160にて、R位置時間カウンタの値に基づき、シフトレバー18がR位置に一定時間Ta以上継続して停滞しているか否かを判定する。具体的には、R位置時間カウンタの値が、その一定時間Taに相当する値以上になったか否かを判定する。そして、シフトレバー18がR位置に一定時間Ta以上停滞していないと判定した場合には(S160:NO)、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18がR位置に一定時間Ta以上停滞していると判定した場合には(S160:YES)、S170に進む。
【0053】
S170では、シフトレバー18がR位置に操作されたと判定して、そのことを示すR位置確定フラグに1をセットする。そして、その後、当該縦方向操作検出処理を終了する。
【0054】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、R位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“R”へと切り替える。
【0055】
また、上記S120にて、シフトレバー18の縦方向位置がD位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、D位置に該当する電圧範囲evdに入っていると判定した場合)には、S180に進み、D位置時間カウンタをインクリメントする。
【0056】
次にS190にて、不定位置フラグを0にクリアし、続くS200にて、R位置時間カウンタを0にクリアする。
次にS210にて、D位置時間カウンタの値に基づき、シフトレバー18がD位置に一定時間Ta以上継続して停滞しているか否かを判定する。具体的には、D位置時間カウンタの値が、その一定時間Taに相当する値以上になったか否かを判定する。そして、シフトレバー18がD位置に一定時間Ta以上停滞していないと判定した場合には(S210:NO)、そのまま当該縦方向操作検出処理を終了するが、シフトレバー18がD位置に一定時間Ta以上停滞していると判定した場合には(S210:YES)、S220に進む。
【0057】
S220では、シフトレバー18がD位置に操作されたと判定して、そのことを示すD位置確定フラグに1をセットする。そして、その後、当該縦方向操作検出処理を終了する。
【0058】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、D位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“D”へと切り替える。
【0059】
また、上記S120にて、シフトレバー18の縦方向位置が不定位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、不定位置に該当する電圧範囲ev1,ev2の何れかに入っていると判定した場合)には、S230に進み、不定位置フラグに1をセットする。そして、続くS240にて、D位置時間カウンタとR位置時間カウンタを0にクリアし、その後、当該縦方向操作検出処理を終了する。
【0060】
また、上記S120にて、シフトレバー18の縦方向位置が原点位置であると判定した場合(即ち、縦方向センサ21aの出力電圧Vvが、原点位置に該当する電圧範囲ev0に入っていると判定した場合)には、S250に進み、D位置時間カウンタとR位置時間カウンタを0にクリアする。
【0061】
次にS260にて、不定位置フラグが1であるか否かを判定し、不定位置フラグが1であれば、次のS270にて、その不定位置フラグを0にリセットする。尚、この場合は、シフトレバー18が不定位置から原点位置に戻った直後である。
【0062】
そして、次のS280にて、R位置確定フラグとD位置確定フラグとの何れかが1であるか否かを判定し、それら確定フラグの何れかが1であると判定した場合には、次のS290にて、その1である確定フラグを0にクリアする。そして、その後、当該縦方向操作検出処理を終了する。
【0063】
このため、S170又はS220でシフトレバー18がR位置又はD位置まで操作されたと判定された後、シフトレバーが、そのR位置又はD位置から不定位置を通って原点位置に戻った場合には、上記S250〜S290の処理が行われることとなる。
【0064】
一方、上記S280にて、R位置確定フラグとD位置確定フラグとの何れも1ではないと判定した場合には、シフトレバー18が原点位置から不定位置に移動した後、上記S170又はS220で当該シフトレバー18がR位置又はD位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなシフトレバー18への中途半端な操作(シフトレンジの切り替えに至らない無効な操作であり、慌てたいい加減な操作であることから、以下、ビジー(busy)シフトという)が行われたと判断して、S300に移行する。
【0065】
S300では、ビジーシフト判定時の処理として、ビジーシフトが行われたこと(換言すれば、今回のシフトレバー18の操作が無効であること)を運転者に警告する処理を行う。例えば、メータECU13に指令を与えて、インストルメントパネル内の発音器(ブザーやチャイム等)から警告音を出力させたり、インストルメントパネル内の表示機器に警告のためのメッセージ(アイコンや文章)を表示させる。
【0066】
更にS300では、ビジーシフト判定時の処理として、ビジーシフトが行われたことを示す履歴情報を、EEPROM7に記憶する。
その履歴情報は、何れのシフト位置方向へのビジーシフトであるかを示す方向情報と共に、そのビジーシフトを検出したときの、時間情報、車両の走行距離、及び車両の位置情報も含むものである。
【0067】
そして、何れのシフト位置方向へのビジーシフトであるかは、前回の当該縦方向操作検出処理におけるS120での判定結果によって判別する。つまり、前回のS120で、シフトレバー18が原点位置からR位置へ至るまでの不定位置にあると判定していた場合には、R位置方向へのビジーシフトであると判別することができ、同様に、前回のS120で、シフトレバー18が原点位置からD位置へ至るまでの不定位置にあると判定していた場合には、D位置方向へのビジーシフトであると判別することができる。
【0068】
また、時間情報としては、1日のうちの時刻や年月日も含む時刻が好ましいが、例えば車両のイグニッションスイッチがオンされてからの経過時間でも良い。また、時間情報としての時刻や、車両の走行距離は、例えばメータECU13から取得することができ、車両の位置情報は、例えばナビECU12から取得することができる。
【0069】
そして、このようなS300の処理を終えると、当該縦方向操作検出処理を終了する。
尚、マイコン6は、SBWECU1と通信可能に接続される診断装置(いわゆる診断ツール)からの要求を受けると、その診断装置へEEPROM7内の履歴情報を送信するようになっている。また、上記のような履歴情報を記憶する記憶手段としては、EEPROM7に限らず、例えば、電源バックアップされた揮発性メモリ(いわゆるバックアップRAMやスタンバイRAMと呼ばれるメモリ)を用いても良い。この場合、マイコン6は、診断装置からの要求に応じて、その電源バックアップされた揮発性メモリ内の履歴情報を、上記診断装置へ送信するようになっていれば良い。
【0070】
一方、上記S260で不定位置フラグが1ではないと判定した場合には、前回の処理時にもシフトレバー18が原点位置にあったということであるため、そのまま当該縦方向操作検出処理を終了する。
【0071】
また、マイコン6は、シフトレバー18の横方向の操作についても、図3と同様の、図4に示す横方向操作検出処理を行う。尚、その横方向操作検出処理は、図3の縦方向操作検出処理と並行して、一定の時間毎に繰り返し実行される。また、図4において、図3と同じか同様の処理ステップについては、図3のステップ番号に1を加えたステップ番号を付している。
【0072】
図4に示すように、マイコン6が横方向操作検出処理の実行を開始すると、まずS111にて、シフトセンサ21を成す縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18が縦方向の原点にあるか否か(換言すれば、シフトレバー18がシフトゲージ19における横方向溝内にあるか否か)を判定する。具体的には、縦方向センサ21aの出力電圧Vvが、前述の電圧範囲ev0に入っているか否かを判定する(図2参照)。
【0073】
そして、シフトレバー18が縦方向の原点にないと判定した場合には、そのまま当該横方向操作検出処理を終了するが、シフトレバー18が縦方向の原点にあると判定した場合には、S121に進む。
【0074】
S121では、シフトセンサ21を成す横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18の横方向位置(即ち、シフトゲージ19における横方向溝での位置)が、N位置と原点位置と不定位置との何れであるかを判定する。具体的には、横方向センサ21bの出力電圧Vhが、シフトレバー18がN位置にあると考えられる電圧範囲ehnと、シフトレバー18が横方向の原点にあると考えられる電圧範囲eh0と、シフトレバー18が不定位置にあると考えられる電圧範囲eh1との、何れに入っているか否かを判定する(図2参照)。
【0075】
そして、このS121にて、シフトレバー18の横方向位置がN位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、N位置に該当する電圧範囲ehnに入っていると判定した場合)には、S131に進み、N位置時間カウンタをインクリメントする。このN位置時間カウンタは、シフトレバー18がN位置に停滞している継続時間を計測するためのカウンタである。
【0076】
次にS141にて、シフトレバー18が横方向の不定位置にあったことを示す不定位置フラグを0にクリアする。尚、この図4の処理で読み書き(リード/ライト)される不定位置フラグは、図3の処理で読み書きされる不定位置フラグとは別のフラグである。
【0077】
次にS161にて、N位置時間カウンタの値に基づき、シフトレバー18がN位置に一定時間Ta以上継続して停滞しているか否かを判定する。そして、シフトレバー18がN位置に一定時間Ta以上停滞していないと判定した場合には(S161:NO)、そのまま当該横方向操作検出処理を終了するが、シフトレバー18がN位置に一定時間Ta以上停滞していると判定した場合には(S161:YES)、S171に進む。
【0078】
S171では、シフトレバー18がN位置に操作されたと判定して、そのことを示すN位置確定フラグに1をセットする。そして、その後、当該横方向操作検出処理を終了する。
【0079】
すると、マイコン6は、図示しない別のシフトレンジ切替処理により、N位置確定フラグが1であることを検知して、モータ24を駆動することにより、自動変速機2のシフトレンジを“N”へと切り替える。
【0080】
また、上記S121にて、シフトレバー18の横方向位置が不定位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、不定位置に該当する電圧範囲eh1に入っていると判定した場合)には、S231に進み、不定位置フラグに1をセットする。そして、続くS241にて、N位置時間カウンタを0にクリアし、その後、当該横方向操作検出処理を終了する。
【0081】
また、上記S121にて、シフトレバー18の横方向位置が原点位置であると判定した場合(即ち、横方向センサ21bの出力電圧Vhが、原点位置に該当する電圧範囲eh0に入っていると判定した場合)には、S251に進み、N位置時間カウンタを0にクリアする。
【0082】
次にS261にて、不定位置フラグが1であるか否かを判定し、不定位置フラグが1であれば、次のS271にて、その不定位置フラグを0にリセットする。尚、この場合は、シフトレバー18が横方向の不定位置から原点位置に戻った直後である。
【0083】
そして、次のS281にて、N位置確定フラグが1であるか否かを判定し、N位置確定フラグが1であれば、次のS291にて、そのN位置確定フラグを0にクリアする。そして、その後、当該横方向操作検出処理を終了する。
【0084】
このため、S171でシフトレバー18がN位置まで操作されたと判定された後、シフトレバーが、そのN位置から不定位置を通って原点位置に戻った場合には、上記S251〜S291の処理が行われることとなる。
【0085】
一方、上記S281にて、N位置確定フラグが1ではないと判定した場合には、シフトレバー18が原点位置から横方向の不定位置に移動した後、上記S171で当該シフトレバー18がN位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなシフトレバー18への中途半端な操作であるビジーシフトが行われたと判断して、S301に移行する。そして、そのS301では、図3のS300と同様の処理を行い、その後、当該横方向操作検出処理を終了する。
【0086】
また、上記S261で不定位置フラグが1ではないと判定した場合には、前回の処理時にもシフトレバー18が原点位置にあったということであるため、そのまま当該横方向操作検出処理を終了する。
【0087】
次に、以上のようなSBWECU1の作用について、シフトレバー18がR位置の方向に操作された場合を例に挙げて説明する。尚、シフトレバー18がD位置又はN位置の方向に操作された場合も同様であるため、説明は省略する。
【0088】
運転者が、シフトレバー18を、原点位置からR位置の方向に動かして、そのR位置に一定時間Ta以上保持したならば、SBWECU1のマイコン6は、図3におけるS170の処理により、シフトレバー18がR位置に操作されたと判定して、自動変速機2のシフトレンジを“R”に切り替えることとなる。
【0089】
一方、図2に示すパターン(1)のように、シフトレバー18が原点位置からR位置側の不定位置(不定領域)まで移動した後、R位置へ至ることなく原点位置に戻ったとすると、マイコン6は、図3におけるS260で“NO”と判定する状態から、S230,S240の処理を行う状態となり、その後、S130〜S170の処理もS180〜S220の処理も行うことなく、シフトレバー18が原点位置に戻った際に、S250〜S280の処理を行うこととなる。そして、その場合、マイコン6は、S280にて“NO”と判定、即ち、ビジーシフトが行われたと判定し、S300にてビジーシフト判定時の処理(運転者への警告と履歴情報の記憶)を行うこととなる。
【0090】
このため、運転者がシフトレバー18を原点位置からR位置へ向けて操作したものの、シフトレバー18がR位置に到達する前に、シフトレバー18から手を放してしまった場合に、そのような操作を、ビジーシフトとして検出することができる。
【0091】
また、図2に示すパターン(2)のように、シフトレバー18が原点位置からR位置まで移動したが、一定時間Taが経過する前に、そのR位置から離脱して原点位置に戻ったとすると、マイコン6は、図3におけるS260で“NO”と判定する状態から、S230,S240の処理を行う状態となり、その後、S130〜S160の処理を行う状態となるが、S170の処理を行うことなく、S230,S240の処理を行う状態に戻り、シフトレバー18が原点位置に戻った際に、S250〜S280の処理を行うこととなる。そして、その場合にも、マイコン6は、S280にて“NO”と判定、即ち、ビジーシフトが行われたと判定し、S300にてビジーシフト判定時の処理を行うこととなる。
【0092】
このため、運転者がシフトレバー18を原点位置からR位置まで操作したものの、シフトレバー18から手を放すのが早すぎて、シフトレバー18のR位置での停滞時間が、操作有りと認識される一定時間Taよりも短かった場合に、そのような操作を、ビジーシフトとして検出することができる。
【0093】
このようなSBWECU1によれば、運転者が意志を持ってシフトレバー18を操作したものの、その操作が雑で不十分なことから、シフトレバー18がシフト位置に操作されたとは当該ECU1に認知されずに、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのようなシフトレバー18に対する不十分な操作を、ビジーシフト(中途半端な操作)として検出することができる。
【0094】
そして、そのビジーシフトの検出時には、運転者に音や表示での警告が行われるため、今回のシフトレバー18の操作が無効であることを運転者に知らせることができ、その結果、運転者が自分の予期しない方向に車両を動かしてしまうといったことを防止することができる。
【0095】
また、ビジーシフトの検出時には、EEPROM7に履歴情報が記憶されるため、仮に、運転者が、ビジーシフトに起因した勘違い(即ち、シフトレバー18を操作してシフトレンジを切り替えたつもりが、その操作が不十分でシフトレンジが切り替わらなかったという勘違い)により車両を逆走させたりオーバーランさせたりして事故が起こった場合に、調査者は、前述の診断装置によりEEPROM7内の履歴情報を読み出すことで、その事故の原因を容易に特定することができるようになる。つまり、その事故が運転者の誤操作(即ち、ビジーシフト)によるものであったことを証明することができるようになる。また特に、履歴情報に含まれる時間情報、車両の走行距離、及び車両の位置情報により、運転者がビジーシフトをいつどこで行ったかを容易に調べることができ、事故の原因を調査し証明する際に有効である。
【0096】
尚、上記実施形態では、シフトレバー18が何れかのシフト位置に一定時間Ta以上保持されて始めて、そのシフト位置への操作を確定判定するようになっていたが、一定時間Taを0にし、シフトセンサ21からの電圧のみで、シフトレバー18のシフト位置への操作を確定判定するように構成しても良い。
【0097】
この場合、図3のS130,S150,S160,S180,S200,S210,S240,S250と、図4のS131,S161,S241,S251の各処理を削除することができる。そして、図2に示したパターン(1),(2)のうち、パターン(1)の操作だけがビジーシフトとして検出されることとなる。
【0098】
一方、上記実施形態では、シフトレバー18が操作部に相当し、“R”,“D”,“N”の各シフト位置が操作確定位置に相当している。また、シフトセンサ21が検出器に相当している。そして、図3のS110〜S130,S150〜S180,S200〜S220,S240,S250と、図4のS111〜S131,S161,S171,S241,S251が、操作判定手段に相当し、図3のS140,S190,S230,S260〜S290と、図4のS141,S231,S261〜S291が、中途半端操作検出手段に相当している。そして更に、図3のS300と図4のS301が、警告手段及び履歴記憶手段に相当している。
[第2実施形態]
次に、第2実施形態のSBWECUについて説明する。尚、符号としては、第1実施形態と同じものを用いる。そして、第1実施形態と相違する点のみ説明する。
【0099】
まず、シフトレバー18が、モーメンタリ型ではなく、オルタネート型になっている。
即ち、図5に示すように、第2実施形態のシフトレバー18には、第1実施形態のような原点位置がなく、そのシフトレバー18は、力が加えられることで、前述した“R”,“D”,“N”の各シフト位置に移動すると共に、力が取り除かれてもその位置が変わらない。また、原点位置がないため、シフトゲージ19の縦方向溝において、D位置とR位置との間の部分は全て不定位置になっており、同様に、シフトゲージ19の横方向溝において、N位置以外の部分は全て不定位置になっている。
【0100】
尚、図5において、ev3は、図2に示したev0,ev1,ev2の各電圧範囲を合わせた電圧範囲であり、シフトレバー18が縦方向の不定位置にあると考えられる縦方向センサ21aの出力電圧Vvの電圧範囲である。同様に、eh2は、図2に示したeh0,eh1の各電圧範囲を合わせた電圧範囲であり、シフトレバー18が横方向の不定位置にあると考えられる横方向センサ21bの出力電圧Vhの電圧範囲である。
【0101】
そして、本第2実施形態においても、SBWECU1のマイコン6は、シフトセンサ21(縦方向センサ21a及び横方向センサ21b)からの信号により、シフトレバー18が“N”,“D”,“R”の何れかのシフト位置に操作されたことを判定するが、その判定処理は、下記の処理である。
【0102】
まず、シフトレバー18がD位置とR位置に操作されたことを判定するための判定処理は、図3におけるS120,S130,S150〜S180,S200〜S220,S240からなる処理と同じ処理である。但し、S120では、縦方向センサ21aの出力電圧Vvに基づいて、シフトレバー18の縦方向位置が、R位置とD位置と不定位置との何れであるかを判定する。
【0103】
そして、シフトレバー18がN位置に操作されたことを判定するための判定処理は、図4におけるS121,S131,S161,S171,S241からなる処理と同じ処理である。但し、S121では、横方向センサ21bの出力電圧Vhに基づいて、シフトレバー18の横方向位置が、N位置と不定位置との何れであるかを判定する。
【0104】
そして更に、本第2実施形態において、SBWECU1のマイコン6は、ビジーシフトを検出するための処理として、図6のビジーシフト検出処理を実行する。尚、図6の処理は、予め定められた一定の時間毎に繰り返し実行される。
【0105】
図6に示すように、マイコン6がビジーシフト検出処理の実行を開始すると、まずS310にて、シフトセンサ21を成す縦方向センサ21a及び横方向センサ21bからの信号に基づいて、シフトレバー18が不定位置にあるか否かを判定する。
【0106】
具体的には、縦方向センサ21aの出力電圧Vvが、不定位置に該当する電圧範囲ev3に入っており、且つ、横方向センサ21bの出力電圧Vhも、不定位置に該当する電圧範囲eh2に入っているか否か判定する。また、縦方向センサ21aの出力電圧Vvが、D位置とR位置に該当する電圧範囲evd,evrに入っておらず、且つ、横方向センサ21bの出力電圧Vhも、N位置に該当する電圧範囲ehnに入っていないかどうかを判定するようにしても良い。
【0107】
そして、シフトレバー18が不定位置にないと判定した場合には、S320に進んで、不定位置時間カウンタを0にクリアし、その後、当該ビジーシフト検出処理を終了する。尚、不定位置時間カウンタは、シフトレバー18が不定位置に停滞している継続時間を計測するためのカウンタである。
【0108】
一方、上記S310にて、シフトレバー18が不定位置にあると判定した場合には、S330に移行して、不定位置時間カウンタをインクリメントする。
次にS340にて、不定位置時間カウンタの値に基づき、シフトレバー18が不定位置に所定時間Tb以上停滞しているか否かを判定する。具体的には、不定位置時間カウンタの値が、その所定時間Tbに相当する値以上になったか否かを判定する。尚、所定時間Tbは、シフトレバー18を普通に操作して、各シフト位置間を移動させるのに要する時間よりも、長い時間に設定されている。
【0109】
そして、シフトレバー18が不定位置に所定時間Tb以上停滞していないと判定した場合には(S340:NO)、そのまま当該ビジーシフト検出処理を終了するが、シフトレバー18が不定位置に所定時間Tb以上停滞していると判定した場合には(S340:YES)、ビジーシフトが行われたと判断して、S350に進む。
【0110】
S350では、図3のS300と同様のビジーシフト判定時の処理(運転者への警告と履歴情報の記憶)を行い、その後、当該ビジーシフト検出処理を終了する。
このような第2実施形態のSBWECU1では、図5に示すパターン(3)のように、シフトレバー18が不定位置(不定領域)に存在する時間が所定時間Tbを超えると、マイコン6が、図6のS340にて“YES”と判定、即ち、ビジーシフトが行われたと判定することとなる。
【0111】
よって、運転者が意志を持ってシフトレバー18を操作したものの、その操作が不十分でシフトレバー18が不定位置で止まってしまい、シフトレンジの切り替えが実施されない、という事態が発生した場合に、そのようなシフトレバー18に対する不十分な操作を、ビジーシフト(中途半端な操作)として検出することができる。つまり、運転者がシフトレバー18を何れかのシフト位置から他の目的のシフト位置へ向けて操作したものの、シフトレバー18が目的のシフト位置へ至る途中の不定位置にある段階でシフトレバー18から手を放してしまった、という操作を行った場合、その操作がビジーシフトとして検出される。
【0112】
そして、本第2実施形態においても、ビジーシフトの検出時には、S350の処理により、運転者に音や表示での警告が行われると共に、EEPROM7に履歴情報が記憶されるため、第1実施形態について述べたのと同じ効果が得られる。つまり、今回のシフトレバー18の操作が無効であることを運転者に知らせることができ、また、仮に運転者が、ビジーシフトに起因した勘違いにより事故を起こした場合に、その事故の原因を容易に特定することができるようになる。
【0113】
以上、本発明の一実施形態について説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。
[他の実施形態]
例えば、上記各実施形態SBWECU1において、Pスイッチ22についても、シフトレバー18に対するビジーシフトと同様の中途半端な操作を検出するように構成しても良い。
【0114】
具体的に説明すると、まず図7(A)に示すように、Pスイッチ22は、人の手によって押されるボタン部22aと、そのボタン部22aを摺動可能に保持する筐体22bとを有しているが、図7(B)に示すように、筐体22b内でのボタン部22aの位置(ストローク量)に応じた組み合わせでオン/オフする複数の位置検出用スイッチを設ける。
【0115】
この例では、2つの位置検出用スイッチSW1,SW2を設けている。そして、ボタン部22aが無操作状態の原点位置にある場合に、スイッチSW1がオンでスイッチSW2がオフし、ボタン部22aが原点位置から操作確定位置としてのオン位置に至る途中の不定位置にある場合に、スイッチSW1,SW2が両方共にオフし、ボタン部22aがオン位置にある場合に、スイッチSW1がオフでスイッチSW2がオンするようになっている。尚、Pスイッチ22について中途半端な操作を検出しないのであれば、スイッチSW1は不要でスイッチSW2だけを設けた構成となる。
【0116】
そして、SBWECU1のマイコン6は、Pスイッチ22に対する操作を検出するためのPスイッチ操作検出処理として、図4におけるS121〜S301からなる処理を下記(a),(b)のように変更した処理を、一定の時間毎に繰り返し実行すれば良い。
【0117】
(a)S121では、シフトレバー18の横方向位置ではなく、ボタン部22aの筐体22b内での位置が、原点位置と不定位置とオン位置との何れであるかを、上記位置検出用スイッチSW1,SW2のオン/オフ状態の組み合わせに基づき判定する。
【0118】
(b)そして、そのS121にて、ボタン部22aがオン位置であると判定した場合には、S131へ進む。
但し、この処理の場合、N位置時間カウンタは、ボタン部22aがオン位置に停滞している継続時間を計測するためのカウンタ(オン位置時間カウンタ)となり、N位置確定フラグは、ボタン部22aがオン位置に操作されたことを示すフラグ(オン位置確定フラグ)となる。そして、S281にて、N位置確定フラグが1ではないと判定した場合には、ボタン部22aが原点位置から不定位置に移動した後、S171で当該ボタン部22aがオン位置まで操作されたと判定されることなく原点位置に戻った、ということであり、そのようなボタン部22aへの中途半端な操作が行われたと判断することとなる。
【0119】
以上のように構成すれば、運転者がPスイッチ22のボタン部22aを押したものの、そのボタン部22aから手を放すのが早かったことから、Pスイッチ22が操作されたとは当該SBWECU1に認知されずに、シフトレンジの“P”への切り替えが実施されない、という事態が発生した場合に、そのようなPスイッチ22に対する不十分な操作を検出して、運転者に警告したり履歴情報を記憶したりすることができる。
【0120】
また、ボタン部22aの位置が原点位置と不定位置とオン位置との何れであるかを判別するためのセンサとしては、上記のような複数のスイッチSW1,SW2に限らず、例えば図7(C)に示すように、ボタン部22aの位置に応じて出力電圧が3通りに変化するものでも良く、また、ボタン部22aの原点位置からのストローク量に応じて出力電圧が増加していくようなセンサでも良い。
【0121】
一方、上記第1実施形態SBWECU1において、シフトレバー18の移動パターン(換言すれば、シフトゲージ19の形状)は、図2のものに限らず、例えば図8のようなものでも良い。尚、図8において、“B”は、“D”と同様に車両を前進させるが“D”よりもエンジンブレーキが良く効くブレーキレンジのシフト位置である。また、図8のパターンでは、シフトレバー18が原点位置からR位置又はD位置へ操作される際に、N位置を経由することとなるため、シフトレバー18がN位置に操作されたと判定するための判定時間(前述のTa)を、他のシフト位置に関する判定時間よりも長くしておけば良い。
【0122】
また同様に、第2実施形態についても、シフトレバー18の移動パターンは、図5に示したもの以外でも良い。
【図面の簡単な説明】
【0123】
【図1】実施形態のシフト・バイ・ワイヤECU(SBWECU)と、それの周辺装置とを表す構成図である。
【図2】シフトレバー、シフトゲージ及びシフトセンサを説明する説明図である。
【図3】縦方向操作検出処理を表すフローチャートである。
【図4】横方向操作検出処理を表すフローチャートである。
【図5】第2実施形態のシフトレバー及びSBWECUの作用を説明する説明図である。
【図6】第2実施形態のビジーシフト検出処理を表すフローチャートである。
【図7】他の実施形態を説明する第1の説明図である。
【図8】他の実施形態を説明する第2の説明図である。
【符号の説明】
【0124】
1…SBWECU(シフト・バイ・ワイヤECU)、2…自動変速機、6…マイコン、7…EEPROM、8…シフトレンジ切替機構、11…ECTECU、12…ナビECU、13…メータECU、18…シフトレバー、19…シフトゲージ、21…シフトセンサ、21a…縦方向センサ、21b…横方向センサ、22…Pスイッチ、22a…ボタン部、22b…筐体、24…モータ
【特許請求の範囲】
【請求項1】
車両に搭載された自動変速機のシフトレンジを切り替えるために操作されるモーメンタリ型の操作部が、原点位置から操作確定位置まで操作されたか否かを判定する操作判定手段を備え、
前記操作判定手段により前記操作部が前記操作確定位置まで操作されたと判定されると、アクチュエータを駆動することにより、前記自動変速機のシフトレンジを前記判定された操作確定位置に対応するレンジへと切り替えるシフトレンジ切替制御装置であって、
前記操作部が、前記原点位置と、前記操作確定位置と、前記原点位置から前記操作確定位置へ至る途中の位置である不定位置との、何れにあるかを識別可能な位置検出信号を出力する検出器からの前記位置検出信号に基づいて、前記操作部が、前記原点位置から前記不定位置に移動した後、前記操作判定手段により該操作部が前記操作確定位置まで操作されたと判定されることなく前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出する中途半端操作検出手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項2】
請求項1に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段は、
前記操作部が、前記原点位置から前記不定位置に移動した後、前記操作確定位置へ至ることなく前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出するようになっていること、
を特徴とするシフトレンジ切替制御装置。
【請求項3】
請求項1又は請求項2に記載のシフトレンジ切替制御装置において、
前記操作判定手段は、前記操作部が一定時間以上継続して前記操作確定位置に停滞したか否かを判定し、その判定で肯定判定した場合に、前記操作部が前記操作確定位置まで操作されたと判定するようになっており、
前記中途半端操作検出手段は、前記操作部が、前記操作確定位置に至ってから前記一定時間が経過する前に該操作確定位置から離脱して前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出するようになっていること、
を特徴とするシフトレンジ切替制御装置。
【請求項4】
車両に搭載された自動変速機のシフトレンジを複数通りのシフトレンジの何れかに切り替えるために操作される操作部が、前記複数通りのシフトレンジの何れかに対応したシフト位置に操作されたことを検出すると、アクチュエータを駆動することにより、前記自動変速機のシフトレンジを前記検出したシフト位置に対応するシフトレンジへと切り替えるシフトレンジ切替制御装置であって、
前記操作部が、何れかのシフトレンジに対応したシフト位置から他のシフトレンジに対応したシフト位置へ至る途中の位置である不定位置にあることを識別可能な位置検出信号を出力する検出器からの前記位置検出信号に基づいて、前記操作部が前記不定位置に所定時間以上停滞していることを、前記操作部への中途半端な操作として検出する中途半端操作検出手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段が前記操作部への中途半端な操作を検出した場合に、前記車両の運転者に対して警告する処理を行う警告手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段が前記操作部への中途半端な操作を検出した場合に、そのことを示す履歴情報を記憶手段に書き込む履歴記録手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項7】
請求項6に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの時間も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【請求項8】
請求項6又は請求項7に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの前記車両の走行距離も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【請求項9】
請求項6ないし請求項8の何れか1項に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの前記車両の位置情報も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【請求項1】
車両に搭載された自動変速機のシフトレンジを切り替えるために操作されるモーメンタリ型の操作部が、原点位置から操作確定位置まで操作されたか否かを判定する操作判定手段を備え、
前記操作判定手段により前記操作部が前記操作確定位置まで操作されたと判定されると、アクチュエータを駆動することにより、前記自動変速機のシフトレンジを前記判定された操作確定位置に対応するレンジへと切り替えるシフトレンジ切替制御装置であって、
前記操作部が、前記原点位置と、前記操作確定位置と、前記原点位置から前記操作確定位置へ至る途中の位置である不定位置との、何れにあるかを識別可能な位置検出信号を出力する検出器からの前記位置検出信号に基づいて、前記操作部が、前記原点位置から前記不定位置に移動した後、前記操作判定手段により該操作部が前記操作確定位置まで操作されたと判定されることなく前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出する中途半端操作検出手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項2】
請求項1に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段は、
前記操作部が、前記原点位置から前記不定位置に移動した後、前記操作確定位置へ至ることなく前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出するようになっていること、
を特徴とするシフトレンジ切替制御装置。
【請求項3】
請求項1又は請求項2に記載のシフトレンジ切替制御装置において、
前記操作判定手段は、前記操作部が一定時間以上継続して前記操作確定位置に停滞したか否かを判定し、その判定で肯定判定した場合に、前記操作部が前記操作確定位置まで操作されたと判定するようになっており、
前記中途半端操作検出手段は、前記操作部が、前記操作確定位置に至ってから前記一定時間が経過する前に該操作確定位置から離脱して前記原点位置に戻ったことを、前記操作部への中途半端な操作として検出するようになっていること、
を特徴とするシフトレンジ切替制御装置。
【請求項4】
車両に搭載された自動変速機のシフトレンジを複数通りのシフトレンジの何れかに切り替えるために操作される操作部が、前記複数通りのシフトレンジの何れかに対応したシフト位置に操作されたことを検出すると、アクチュエータを駆動することにより、前記自動変速機のシフトレンジを前記検出したシフト位置に対応するシフトレンジへと切り替えるシフトレンジ切替制御装置であって、
前記操作部が、何れかのシフトレンジに対応したシフト位置から他のシフトレンジに対応したシフト位置へ至る途中の位置である不定位置にあることを識別可能な位置検出信号を出力する検出器からの前記位置検出信号に基づいて、前記操作部が前記不定位置に所定時間以上停滞していることを、前記操作部への中途半端な操作として検出する中途半端操作検出手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段が前記操作部への中途半端な操作を検出した場合に、前記車両の運転者に対して警告する処理を行う警告手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載のシフトレンジ切替制御装置において、
前記中途半端操作検出手段が前記操作部への中途半端な操作を検出した場合に、そのことを示す履歴情報を記憶手段に書き込む履歴記録手段を備えていること、
を特徴とするシフトレンジ切替制御装置。
【請求項7】
請求項6に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの時間も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【請求項8】
請求項6又は請求項7に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの前記車両の走行距離も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【請求項9】
請求項6ないし請求項8の何れか1項に記載のシフトレンジ切替制御装置において、
前記履歴記録手段は、前記履歴情報として、前記中途半端操作検出手段が前記操作部への中途半端な操作を検出したときの前記車両の位置情報も前記記憶手段に書き込むこと、
を特徴とするシフトレンジ切替制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−216215(P2009−216215A)
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願番号】特願2008−62637(P2008−62637)
【出願日】平成20年3月12日(2008.3.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願日】平成20年3月12日(2008.3.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]