
シフト位置検出装置
【課題】小型化が可能なシフト位置検出装置を提供する。
【解決手段】シフト位置検出装置5は、ケース2と、シフトロッド41と、第1突出部53と、第2突出部54と、第1位置センサ51と、第2位置センサ52と、制御装置57と、を有している。第1突出部53および第2突出部54はシフトロッド41に設けられている。第1位置センサ51は、ケース2に設けられており、第1突出部53が第1検出領域D1内に配置されていることを検出する。第2位置センサ52は、ケース2に設けられており、第2突出部54が第2検出領域D2内に配置されていることを検出する。制御装置57は、第1位置センサ51および第2位置センサ52の検出結果のみに基づいてケース2に対するシフトロッド41の位置を判定する。
【解決手段】シフト位置検出装置5は、ケース2と、シフトロッド41と、第1突出部53と、第2突出部54と、第1位置センサ51と、第2位置センサ52と、制御装置57と、を有している。第1突出部53および第2突出部54はシフトロッド41に設けられている。第1位置センサ51は、ケース2に設けられており、第1突出部53が第1検出領域D1内に配置されていることを検出する。第2位置センサ52は、ケース2に設けられており、第2突出部54が第2検出領域D2内に配置されていることを検出する。制御装置57は、第1位置センサ51および第2位置センサ52の検出結果のみに基づいてケース2に対するシフトロッド41の位置を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変速機のシフト位置を検出するためのシフト位置検出装置に関する。
【背景技術】
【0002】
変速機のシフトレバーの位置(以下、シフト位置ともいう)がどの位置にあるのかを検出するために、シフト位置検出装置が知られている。例えば、シフト位置検出装置は、ケースに設けられた3つの検出センサと、シフトロッドに設けられた被検出部と、を有している。シフトロッドがケースに対して移動すると、被検出部の位置が変化し、3つの検出センサのうち1つにより被検出部の位置が検出される。これにより、ケースに対するシフトロッドの3種類の位置を検出することができる(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開昭62−149659号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載のシフト位置検出装置では、3種類のシフト位置を3つの検出センサを用いて検出しているため、検出センサを設置するスペースが大きくなり、シフト位置検出装置が大型化してしまう。
本発明の課題は、小型化が可能なシフト位置検出装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係るシフト位置検出装置は、第1部材と、第2部材と、少なくとも1つの被検出部と、第1検出部と、第2検出部と、を備えている。第2部材は第1部材に対して移動可能に配置されている。被検出部は第2部材に設けられている。第1検出部は、第1部材に設けられており、被検出部が第1検出領域内に配置されていることを検出する。第2検出部は、第1部材に設けられており、被検出部が第2検出領域内に配置されていることを検出する。位置判定部は、第1検出部および第2検出部の検出結果のみに基づいて第1部材に対する第2部材の位置を判定する。
このシフト位置検出装置では、被検出部が第1検出領域内に配置されていることが第1検出部により検出され、被検出部が第2検出領域内に配置されていることが第2検出部により検出される。第1および第2検出部の検出結果のみに基づいて、位置判定部により第1部材に対する第2部材の複数の位置が判定されるため、3つ以上の検出部が設けられている場合に比べて、第1部材に対する第2部材の位置検出を簡素な構成により実現することができる。つまり、これらの構成により、シフト位置検出装置の小型化が可能となる。
【発明の効果】
【0006】
本発明であれば、小型化が可能なシフト位置検出装置を提供できる。
【図面の簡単な説明】
【0007】
【図1】変速機の概略断面図
【図2】シフト操作機構およびメインシャフトの分解斜視図
【図3】シフト位置検出装置の概略構成図
【図4】(A)〜(D)シフト位置検出装置の動作説明図(第1実施形態)
【図5】(A)〜(D)シフト位置検出装置の動作説明図(第2実施形態)
【図6】(A)〜(D)シフト位置検出装置の動作説明図(第3実施形態)
【図7】(A)〜(D)シフト位置検出装置の動作説明図(第4実施形態)
【図8】位置センサの概略構成図(他の実施形態)
【図9】被検出部の一例(他の実施形態)
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について説明する。
〔第1実施形態〕
<変速機の全体構成>
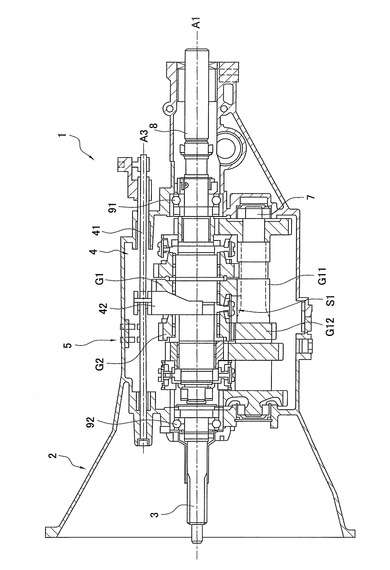
図1を用いて変速機1について説明する。図1は変速機1の概略断面図である。なお、図1において左右方向(回転軸A1に平行な方向)を軸方向とする。
変速機1は、5段変速が可能なFR(Front Engine Rear drive)車用の手動変速機である。具体的には図1に示すように、変速機1は主に、ケース2(第1部材または第2部材の一例)と、入力シャフト3と、メインシャフト8と、カウンタシャフト7と、を備えている。
入力シャフト3は、クラッチ装置(図示せず)を介してエンジン(図示せず)で発生した動力が伝達されるシャフトであり、回転軸A1を中心に回転可能なように軸受92を介してケース2により支持されている。
【0009】
メインシャフト8は、動力を出力するためのシャフトであり、回転軸A1を中心に回転可能なように軸受91を介してケース2により支持されている。メインシャフト8の前方側の端部は、入力シャフト3により回転可能に支持されている。
メインシャフト8には複数のギヤが固定配置あるいは回転可能に配置されていると共に、複数のシンクロ機構が固定配置されている。例えば、メインシャフト8には、第1速メインギヤG1と、第2速メインギヤG2と、シンクロ機構S1と、が固定されている。第1速メインギヤG1は、第1速走行時に使用されるギヤであり、カウンタシャフト7に固定された第1速カウンタギヤG11(後述)と噛み合っている。第2速メインギヤG2は、第2速走行時に使用されるギヤであり、カウンタシャフト7に固定された第2速カウンタギヤG12(後述)と噛み合っている。
【0010】
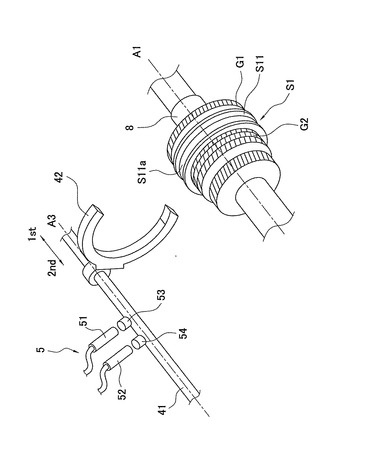
シンクロ機構S1は、第1速メインギヤG1または第2速メインギヤG2をメインシャフト8と連結するための機構である。例えば、図1および図2において、シンクロ機構S1のスリーブS11がメインシャフト8に対して右方向に移動すると、第1速メインギヤG1がメインシャフト8と連結される。また、スリーブS11がメインシャフト8に対して左方向に移動すると、第2速メインギヤG2がメインシャフト8に連結される。
このスリーブS11の軸方向の移動を操作するために、変速機1はシフト操作機構4を有している。図1および図2に示すように、シフト操作機構4は、シフトロッド41(第1部材または第2部材の一例)と、シフトフォーク42と、を有している。
シフトロッド41は、シフトレバー(図示せず)に機械的に連結されており、ケース2により軸方向に移動可能に支持されている。具体的には、シフトロッド41は、中心軸A3を有しており、中心軸A3に沿って移動可能となっている。変速機1には、ケース2に対してシフトロッド41を3種類の軸方向位置で保持するための保持機構(図示せず)が設けられている。この保持機構により、ケース2に対して第1速位置P1(第1位置の一例)、第2速位置P2(第2位置の一例)およびニュートラル位置PN(第3位置の一例)の3種類のシフト位置でシフトロッド41は保持され得る。
【0011】
第1速位置P1は、シンクロ機構S1により第1速メインギヤG1がメインシャフト8に連結されている状態でのシフトロッド41の位置である。第2速位置P2はシンクロ機構S1により第2速メインギヤG2がメインシャフト8に連結されている状態でのシフトロッド41の位置である。ニュートラル位置PNは、シンクロ機構S1により第1速メインギヤG1および第2速メインギヤG2がメインシャフト8に連結されていない状態でのシフトロッド41の位置である。
シフトロッド41にはシフトフォーク42が固定されている。シフトフォーク42は、スリーブS11の外溝S11aに嵌め込まれており、スリーブS11を軸方向に移動可能に構成されている。
ドライバーによりシフトレバーがニュートラルから第1速(1st)に操作されると、シフトロッド41およびシフトフォーク42がケース2に対して軸方向(より詳細には、図1の右方向)に移動し、シンクロ機構S1により第1速メインギヤG1がメインシャフト8に連結される。第1速メインギヤG1がメインシャフト8に連結された状態で、保持機構によりシフトロッド41がケース2に対して第1速位置P1で保持される。
【0012】
ドライバーによりシフトレバーが第1速からニュートラルへ操作されると、保持機構による保持状態が解除され、シフトロッド41がニュートラル位置PNに戻る。
また、ドライバーによりシフトレバーがニュートラルから第2速(2nd)に操作されると、シフトロッド41およびシフトフォーク42がケース2に対して軸方向(より詳細には、図1の左方向)に移動し、シンクロ機構S1により第2速メインギヤG2がメインシャフト8に連結される。第2速メインギヤG2がメインシャフト8に連結された状態で、保持機構によりシフトロッド41がケース2に対して第2速位置P2で保持される。
ドライバーによりシフトレバーが第2速からニュートラルへ操作されると、保持機構による保持状態が解除され、シフトロッド41がニュートラル位置PNに戻る。
このように、ドライバーは、シフト操作機構4を介して変速機1のシフト位置を第1速および第2速に変更することができる。なお、他のシフト位置については、第1速および第2速のための構成と実質的に同じであるため、詳細な説明は省略する。
【0013】
<シフト位置検出装置の構成>
変速機1のシフト位置を検出するために、変速機1にはシフト位置検出装置5が設けられている。本実施形態では、シフトロッド41の第1速位置P1、第2速位置P2およびニュートラル位置PNを検出するためのシフト位置検出装置5について説明する。
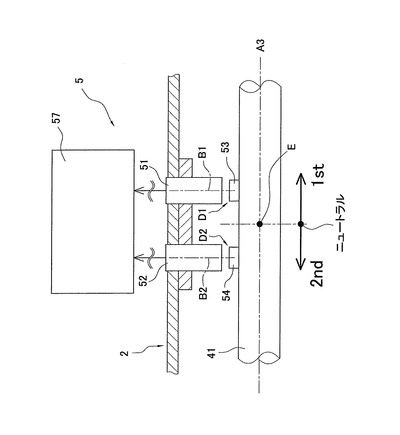
図3に示すように、シフト位置検出装置5は、第1突出部53(被検出部の一例)と、第2突出部54(被検出部の一例)と、第1位置センサ51(第1検出部の一例)と、第2位置センサ52(第2検出部の一例)と、シフト位置を判定する制御装置57(位置判定部の一例)と、を有している。
図2および図3に示すように、第1突出部53は、シフトロッド41に設けられた円柱状の部材であり、第1位置センサ51および第2位置センサ52により検出されるようにシフトロッド41から突出している。本実施形態では、第1突出部53は、シフトロッド41と一体形成されており、シフトロッド41とともに鉄などの磁性体により形成されている。
【0014】
図2および図3に示すように、第2突出部54は、シフトロッド41に設けられた円柱状の部材であり、第1位置センサ51および第2位置センサ52により検出されるようにシフトロッド41から突出している。本実施形態では、第2突出部54は、シフトロッド41と一体形成されており、シフトロッド41とともに鉄などの磁性体により形成されている。
第2突出部54は、第1突出部53と同じ形状を有しており、第1突出部53と軸方向に並んで配置されている。図2に示すように、シフトロッド41の中心軸A3周りにおける第2突出部54の円周方向位置は、第1突出部53の円周方向位置と同じに設定されている。
図3に示すように、第1位置センサ51は、第1検出領域D1内に磁性体が配置されていることを検出できる磁気センサであり、例えば、検出回路を含んだモジュールタイプである。図2および図3に示すように、第1位置センサ51は、概ね円柱状であり、図1に示すようにケース2に固定されている。第1位置センサ51は、シフトロッド41が軸方向に移動した際に第1突出部53や第2突出部54が第1検出領域D1内に配置されるように、第1突出部53および第2突出部54と近接可能な位置に配置されている。
【0015】
第1突出部53または第2突出部54が第1位置センサ51の第1検出領域D1内に配置されると、第1位置センサ51の近傍で磁界の変化が生ずる。第1位置センサ51は、この磁界の変化に応じて電流が誘起される検出回路(図示せず)を有しており、検出回路で誘起された電流を制御装置57へ出力する。制御装置57は、入力された電流に基づいて第1位置センサ51が磁性体を検出しているか否かを判定する。例えば、入力された電流のレベルが所定のレベルよりも高い場合は、第1位置センサ51が磁性体を検出している(ON)と制御装置57は判定し、入力された電流のレベルが所定のレベル以下の場合は、第1位置センサ51が磁性体を検出していない(OFF)と制御装置57は判定する。このように、第1突出部53および第2突出部54のうち一方が第1検出領域D1に配置されていることを、第1位置センサ51により検出することができる。
【0016】
図3に示すように、第2位置センサ52は、第2検出領域D2内に磁性体が配置されていることを検出できる磁気センサであり、例えば、検出回路を含んだモジュールタイプである。図2および図3に示すように、第1位置センサ51と同様に、第2位置センサ52は、概ね円柱状であり、図1に示すようにケース2に固定されている。第2位置センサ52は、シフトロッド41が軸方向に移動した際に第1突出部53や第2突出部54が第2検出領域D2内に配置されるように、第1突出部53および第2突出部54と近接可能な位置に配置されている。
第1突出部53または第2突出部54が第2位置センサ52の第2検出領域D2内に配置されると、第2位置センサ52の近傍で磁界の変化が生ずる。第2位置センサ52は、この磁界の変化に応じて電流が誘起される検出回路(図示せず)を有しており、検出回路で誘起された電流を制御装置57へ出力する。制御装置57は、入力された電流に基づいて第2位置センサ52が磁性体を検出しているか否かを判定する。例えば、入力された電流のレベルが所定のレベルよりも高い場合は、第2位置センサ52が磁性体を検出している(ON)と制御装置57は判定し、入力された電流が所定のレベル以下の場合は、第2位置センサ52が磁性体を検出していない(OFF)と制御装置57は判定する。このように、第1突出部53および第2突出部54のうち一方が第2検出領域D2に配置されていることを、第2位置センサ52により検出することができる。
【0017】
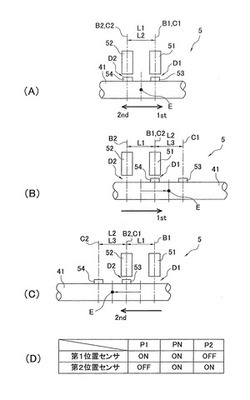
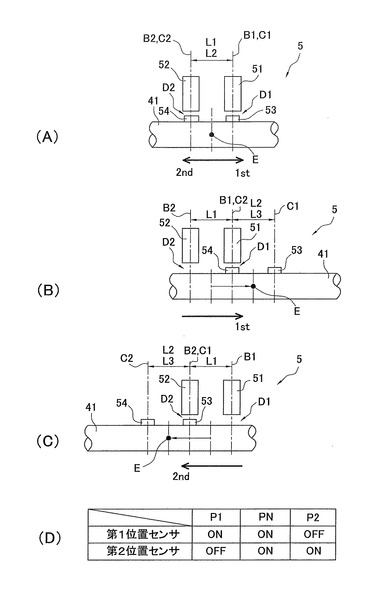
本実施形態では、シフトロッド41がニュートラル位置PNにあるときには、第1突出部53が第1位置センサ51の第1検出領域D1内に配置され、かつ、第2突出部54が第2位置センサ52の第2検出領域D2内に配置される。また、第1突出部53および第2突出部54の間の距離L2は、第1位置センサ51および第2位置センサ52の間の距離L1と同じである。さらに、距離L1およびL2は、シフトロッド41が第1速位置Pから第2速位置P2まで移動する際の移動距離に等しい。したがって、シフトロッド41が第1速位置P1にあるときには、第2突出部54が第1検出領域D1内に配置され、シフトロッド41が第2速位置P2にあるときには、第1突出部53が第2検出領域D2内に配置される。
ここで、距離L1は、第1位置センサ51の中心軸B1および第2位置センサ52の中心軸B2を基準として規定されている。距離L2は、第1突出部53の中心軸C1および第2突出部54の中心軸C2を基準に規定されている。
【0018】
また、ケース2に対するシフトロッド41の位置は、第1突出部53および第2突出部54の軸方向間の中心点Eを基準として説明する。中心点Eが第1位置センサ51および第2位置センサ52の軸方向間の中央に配置されている状態がニュートラル位置PNに対応している。
制御装置57は、エンジンや変速機1を制御する装置であり、第1位置センサ51および第2位置センサ52と電気的に接続されている。制御装置57は、例えば、CPU、RAMおよびROMを有するマイクロコンピュータであり、ROMに記憶されたプログラムがCPUに読み込まれることで様々な機能を実現し得る。
例えば、制御装置57は、シフトロッド41の位置を判定する機能を有している。具体的には、制御装置57は第1位置センサ51および第2位置センサ52から出力された検出結果に基づいてシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているかを判定する。検出部が2つであるため、第1位置センサ51の第1検出結果と第2位置センサ52の第2検出結果との組み合わせに基づいて、制御装置57はシフトロッド41の位置を判定し得る。
【0019】
<位置判定方法>
ここで、図4(A)〜(D)を用いて、シフト位置検出装置5による位置判定方法について説明する。
図4(A)に示すように、シフトロッド41がニュートラル位置PNに配置されている場合、第1位置センサ51は第1突出部53と近接しており、第2位置センサ52は第2突出部54と近接している。
この状態では、第1突出部53が第1位置センサ51の第1検出領域D1内に配置されていると共に、第2突出部54が第2位置センサ52の第2検出領域D2内に配置されているため、例えば第1位置センサ51および第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0020】
図4(B)に示すように、シフトロッド41が第1速位置P1に移動すると、第1突出部53および第2突出部54が第1位置センサ51および第2位置センサ52に対して軸方向に移動する。前述のように、距離L1が距離L2と同じであるため、シフトロッド41が第1速位置P1に移動すると、第1位置センサ51の第1検出領域D1内には第2突出部54が配置される。第1検出領域D1内に第2突出部54が配置されると、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力する。
一方、第2位置センサ52の第2検出領域D2内には第1突出部53および第2突出部54は配置されないため、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
図4(C)に示すように、シフトロッド41が第2速位置P2に移動すると、第1突出部53および第2突出部54が第1位置センサ51および第2位置センサ52に対して軸方向に移動する。前述のように、距離L1が距離L2と同じであるため、シフトロッド41が第2速位置P2に移動すると、第2位置センサ52の第2検出領域D2内には第1突出部53が配置される。第2検出領域D2内に第1突出部53が配置されると、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0021】
一方、第1位置センサ51の第1検出領域D1内には第1突出部53および第2突出部54は配置されないため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力する。
制御装置57は、第1位置センサ51および第2位置センサ52から出力される電流に基づいてシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているか否かを判定する。
具体的には、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力している場合は、図4(A)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置がニュートラル位置PNであると制御装置57は判定する。
【0022】
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、図4(B)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置が第1速位置P1であると制御装置57は判定する。
第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベルよりも高い電流を出力している場合は、図4(C)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置が第2速位置P2であると制御装置57は判定する。
このように、第1位置センサ51および第2位置センサ52の検出結果に基づいて、制御装置57はシフト位置を判定することができる。
【0023】
<変速機の動作>
次に、変速機1の動作について説明する。
車両のアイドリング状態では、例えば、第1位置センサ51および第2位置センサ52を用いて制御装置57により変速機1のシフト位置が監視される。具体的には、第1位置センサ51および第2位置センサ52から出力される電流が制御装置57により所定の周期で確認される。電流のレベルに基づいて、第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置にシフトロッド41が配置されているかが、制御装置57により所定の周期で判定される。
具体的には、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力している場合は、シフトロッド41がニュートラル位置PN(図4(A)に示す位置)に配置されている、つまりシフト位置がニュートラルである、と制御装置57により判定される。
【0024】
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、シフトロッド41が第1速位置P1(図4(B)に示す位置)に配置されている、つまりシフト位置が第1速である、と制御装置57により判定される。
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、シフトロッド41が第2速位置P2(図4(C)に示す位置)に配置されている、つまりシフト位置が第2速である、と制御装置57により判定される。
このように、変速機1のシフト位置がシフト位置検出装置5により判定され、これらの判定結果は、例えば、HSA(Hill Start Assist)およびHDC(Hill Decent Control)などのVDC(Vehicle Dynamics Control)に用いられる。
【0025】
例えば、HSAは登坂時の発進補助制御を行うシステムである。このシステムでは、登坂途中でドライバーブレーキにより車両が停止した後、ブレーキ液圧が所定の圧力に保持されるように各部が制御される。この結果、ドライバーブレーキが解除された際に坂道で車両が後退するのを防止できる。
また、HDCは、急降坂時にドライバーブレーキを用いて自動的に減速制御を行うシステムである。急降板時では、車両の速度が非常に低い場合(例えば、車両の速度が3〜7km/hである場合)、エンジンブレーキのみでは車両の速度が保持できず、車両の速度が上昇してしまう。このシステムでは、急降坂時に車両の速度が必要以上に上昇しないように、ブレーキ液圧を保持することで車両の速度が上がるのを抑制する。
これらHSAおよびHDCでは、前後進判断およびホイール端トルクの算出に変速機1のシフト位置が必要となるため、前述のシフト位置検出装置5での判定結果が利用され得る。
【0026】
<特徴>
以上に説明したシフト位置検出装置5の特徴は以下の通りである。
(1)
このシフト位置検出装置5では、第1突出部53および第2突出部54のうち一方が第1検出領域D1内に配置されていることが第1位置センサ51により検出され、第1突出部53および第2突出部54のうち一方が第2検出領域D2内に配置されていることが第2位置センサ52により検出される。このため、第1位置センサ51および第2位置センサ52の検出結果を利用して制御装置57によりケース2に対してシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているかを判定することができる。
【0027】
より詳細には、第1位置センサ51の第1検出結果と第2位置センサ52の第2検出結果との組み合わせに基づいて、制御装置57によりシフトロッド41の位置が判定されるため、2つのセンサのみで3つのシフト位置(第1速位置P1、第2速位置P2、ニュートラル位置PN)を検出することができる。
これにより、シフトロッド41の位置検出、つまり変速機1のシフト位置を簡素な構成により検出することができ、シフト位置検出装置5の小型化が可能となる。
(2)
このシフト位置検出装置5では、第1位置センサ51が第2突出部54を検出しており、かつ、第2位置センサ52が第1突出部53および第2突出部54のいずれも検出していない場合、ケース2に対してシフトロッド41が第1速位置P1に配置されていると制御装置57により判定される。
【0028】
また、第1位置センサ51が第1突出部53および第2突出部54のいずれも検出しておらず、かつ、第2位置センサ52が第1突出部53を検出している場合、ケース2に対してシフトロッド41が第2速位置P2に配置されていると制御装置57により判定される。
さらに、第1位置センサ51が第1突出部53を検出しており、かつ、第2位置センサ52が第2突出部54を検出している場合、ケース2に対してシフトロッド41がニュートラル位置PNに配置されていると制御装置57により判定される。
このように、2つの被検出部(第1突出部53および第2突出部54)および2つのセンサ(第1位置センサ51および第2位置センサ52)の配置を工夫することで、第1位置センサ51および第2位置センサ52の検出結果の組み合わせを3パターン確保することができる。これにより、3種類のシフト位置を2つのセンサのみで検出することができる。
【0029】
(3)
このシフト位置検出装置5では、シフトロッド41が第1速位置P1および第2速位置P2に配置されている状態で、第1位置センサ51および第2位置センサ52のうちいずれか一方が制御装置57へ所定のレベルよりも高い電流を出力する。このため、シフトロッド41が第1速位置P1および第2速位置P2に配置されている状態で、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベル以下の電流を出力する場合に比べて、第1速または第2速にギヤが入っていることを確実に把握することができ、ギヤが入っている状態で各部を制御したい場合(例えば、前述のHSAあるいはHDCを行う場合)に有効である。
特に、検出されるシフト位置が第1速位置P1および第2速位置P2であるため、低速時のシフト位置を検出したい前述のHSAあるいはHDCを行う場合に、このシフト位置検出装置5は非常に有効である。
【0030】
また、シフトロッド41がニュートラル位置PNに配置されている状態で、第1位置センサ51および第2位置センサ52がともに所定のレベルよりも高い電流を出力するため、ニュートラル位置PNで第1位置センサ51および第2位置センサ52が所定のレベル以下の電流を出力する場合に比べて、ニュートラル位置PNの状態も確実に把握することができる。すなわち、第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの状態にあるかを確実に把握することができ、シフト位置検出装置5の構成として、より好ましい。
(4)
このシフト位置検出装置5では、第1位置センサ51および第2位置センサ52が磁気センサであり、かつ、被検出部として機能する第1突出部53および第2突出部54が磁性体であるため、非接触でシフトロッド41の位置を検出することができる。これにより、第1位置センサ51、第2位置センサ52、第1突出部53および第2突出部54が摩耗して検出精度が低下するのを防止できる。
【0031】
(5)
このシフト位置検出装置5では、被検出部として機能する第1突出部53および第2突出部54がシフトロッド41から突出した凸部であるため、被検出部がシフトロッド41を削って形成された凹部である場合に比べて、シフトロッド41の強度の低下を防止できる。
(6)
このシフト位置検出装置5では、第1突出部53および第2突出部54の間の距離L2は、第1位置センサ51および第2位置センサ52の間の距離L1と同じであるため、確実に小型化を実現できる。
特に、距離L1およびL2が、シフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNに移動する際の移動距離L3に等しいため、例えば、後述する他の実施形態よりもシフト位置検出装置5の軸方向の寸法を短縮することができる。つまり、この構成であれば、より小型のシフト位置検出装置5を提供できる。
【0032】
なお、距離L1、L2および移動距離L3はそれぞれが完全に同じでなくても概ね同じであればよい。例えば、シフト位置検出装置5の検出性能を確保できる範囲内であれば、距離L1、L2および移動距離L3が若干異なっていてもよい。
〔第2実施形態〕
前述の第1実施形態以外に、次のような実施形態も考えられる。なお、以下の説明においては、第1実施形態の構成と実質的に同じ機能を有する構成については、同じ符号を使用し、その詳細な説明は省略する。
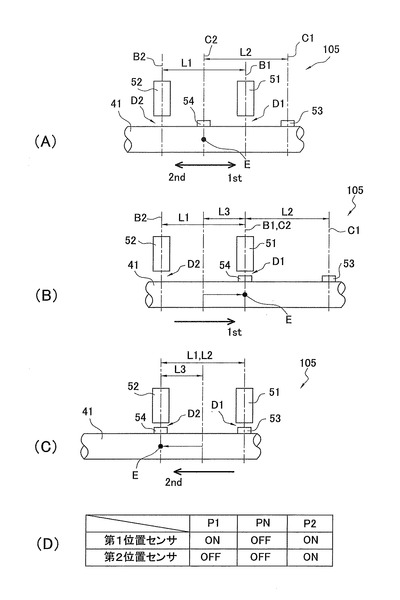
図5(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図5(A)に示すシフト位置検出装置105では、距離L2が距離L1と同じであるが、シフトロッド41がニュートラル位置PNに配置されている状態で、第1突出部53および第2突出部54に対して第1位置センサ51および第2位置センサ52の位置が軸方向にずれている。第1位置センサ51が第1突出部53に対してずれている距離は、シフトロッド41の移動距離L3と同じであり、さらに距離L1およびL2の半分である。つまり、移動距離L3は距離L1およびL2と異なっている。このため、第2突出部54が第1位置センサ51および第2位置センサ52の軸方向の中央に配置されている。
【0033】
この場合、図5(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52はともに制御装置57へ所定のレベル以下の電流を出力する。
一方、図5(B)に示すように、第1速位置P1では、第1位置センサ51は第2突出部54を検出するが、第2位置センサ52は第1突出部53および第2突出部54のいずれも検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力し、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
また、図5(C)に示すように、第2速位置P2では、第1位置センサ51が第1突出部53を検出し、かつ、第2位置センサ52が第2突出部54を検出する。このため、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力する。
【0034】
以上に説明した検出結果の組み合わせに基づいて、制御装置57がシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置105の小型化が可能である。
〔第3実施形態〕
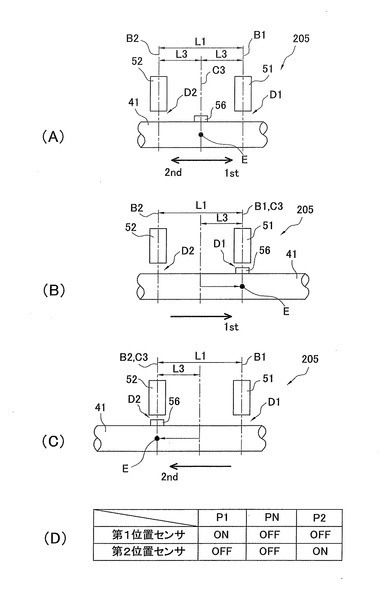
また、図6(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図6(A)に示すシフト位置検出装置205では、被検出部として1つの突出部56が設けられている。このシフト位置検出装置205は、図5(A)に示すシフト位置検出装置105の第1突出部53が省略された構成であると言える。
この場合、図6(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52はともに制御装置57へ所定のレベル以下の電流を出力する。
【0035】
一方、図6(B)に示すように、第1速位置P1では、第1位置センサ51は突出部56を検出するが、第2位置センサ52は突出部56を検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力するが、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
また、図6(C)に示すように、第2速位置P2では、第1位置センサ51は突出部56を検出しないが、第2位置センサ52は突出部56を検出する。このため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力するが、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
以上に説明した検出結果の組み合わせに基づいて、制御装置57はシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置205の小型化が可能である。
【0036】
〔第4実施形態〕
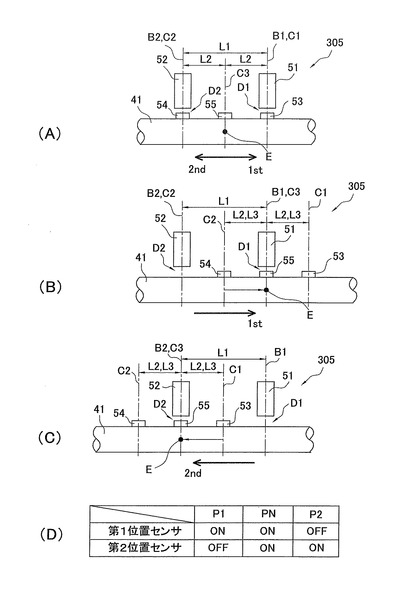
さらに、図7(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図7(A)に示すシフト位置検出装置305では、3つの被検出部がシフトロッド41に設けられている。具体的には、このシフト位置検出装置305は、第1突出部53および第2突出部54に加えて、第3突出部55を有している。第3突出部55は第1突出部53および第2突出部54と同じ材質により形成されており、かつ、同じ形状を有している。
図7(A)に示すニュートラル位置PNの状態では、第1突出部53は第1位置センサ51の第1検出領域D1内に配置されており、第2突出部54は第2位置センサ52の第2検出領域D2内に配置されている。一方、第3突出部55は第1位置センサ51と第2位置センサ52との軸方向間の中央に配置されている。
【0037】
移動距離L3は、距離L2と同じであるが、距離L1とは異なる。距離L1は、距離L2および移動距離L3よりも長く設定されており、距離L2および移動距離L3の2倍である。
この場合、図7(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
一方、図7(B)に示すように、第1速位置P1では、第1位置センサ51は第3突出部55を検出するが、第2位置センサ52は第1突出部53〜第3突出部55のいずれも検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力し、かつ、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
【0038】
また、図7(C)に示すように、第2速位置P2では、第1位置センサ51は第1突出部53〜第3突出部55のいずれも検出しないが、第2位置センサ52は第3突出部55を検出する。このため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力し、かつ、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
以上に説明した検出結果の組み合わせに基づいて、制御装置57はシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置305の小型化が可能である。
<他の実施形態>
本発明の具体的な構成は、前述の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で種々の変更および修正が可能である。
【0039】
(A)
前述の第1〜第4実施形態では、第1位置センサ51および第2位置センサ52が別体であるが、第1位置センサ51および第2位置センサ52が一体になっていてもよい。
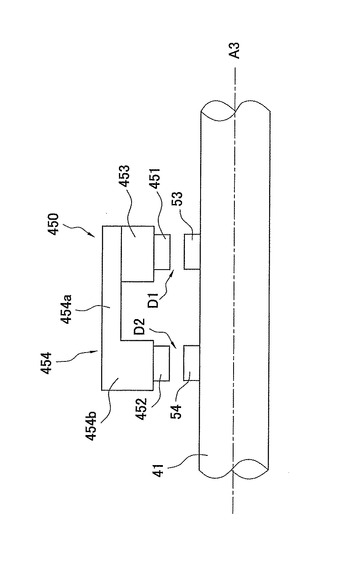
例えば、図8に示す位置検出センサ450では、第1センサ部451と、第2センサ部452と、マグネット453と、磁性体454と、を有している。
第1センサ部451および第2センサ部452は、例えば磁気抵抗素子であり、検出回路(図示せず)に接続されている。第1センサ部451および第2センサ部452は、例えば前述の第1位置センサ51および第2位置センサ52に内蔵されているセンサ部と同じである。
マグネット453のシフトロッド41側には第1センサ部451が配置されている。磁性体454はマグネット453に固定されている。磁性体454のシフトロッド41側には第2センサ部452が配置されている。磁性体454は、マグネット453に固定された本体部454aと、本体部454aからシフトロッド41側に突出する突出部454bと、を有している。突出部454bの先端には第2センサ部452が固定されている。
【0040】
第1センサ部451とシフトロッド41との間の距離は、第2センサ部452とシフトロッド416との間の距離と概ね同じである。
この位置検出センサ450では、2つの位置センサが一体となっているため、構成の簡素化が可能となる。特に、前述のシフト位置検出装置5、105、205および305では、2つの位置センサを用いてシフト位置を検出しているため、2つの位置センサが一体となっている位置検出センサ450を用いることで、構成の簡素化が非常に効果的に行える。
(B)
前述の第1〜第4実施形態では、第1突出部53や第2突出部54、第3突出部55あるいは突出部56は、シフトロッド41と一体形成するものとしたが、これらの部材はシフトロッド41とは別体であってもよい。
【0041】
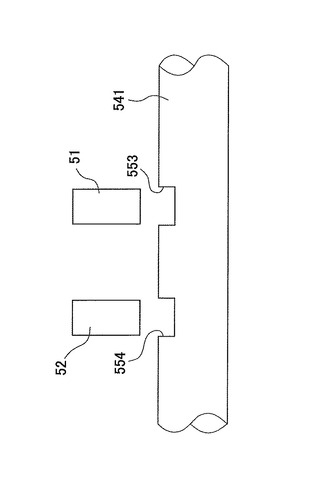
また、前述の第1〜第4実施形態では、第1突出部53や第2突出部54、第3突出部55あるいは突出部56はシフトロッド41から突出した部分としたがシフトロッド41から突出した部分であるが、被検出部はこのような構成に限定されない。例えば、図9に示すように、2つの被検出部がシフトロッド541に形成された第1凹部553および第2凹部554であってもよい。第1凹部553が第1位置センサ51に対向するように配置されると、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力し、第1凹部553が第1位置センサ51と対向せずに第1凹部553以外の部分が第1位置センサ51と対向するように配置されると、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力する。
この場合、第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力する場合、第1位置センサ51の第1検出領域D1内に第1凹部553あるいは第2凹部554が配置されていると判定できる。第2位置センサ52の場合も、これと同様である。
【0042】
この構成であっても、第1位置センサ51および第2位置センサ52の検出結果のみでシフト位置を判定することができ、シフト位置検出装置の小型化が可能となる。
(C)
前述の第1〜第4実施形態では、検出部として磁気センサである第1位置センサ51および第2位置センサ52が用いられているが、検出部は別の方式の位置センサであってもよい。例えば、非接触式の近接スイッチの場合は、静電容量形、超音波形および光電形の位置センサが検出部として考えられる。さらに、検出部は接触式の位置センサであってもよい。
(D)
前述の第1〜第4実施形態では、シフトロッド41に被検出部として機能する第1突出部53や第2突出部54、第3突出部55あるいは突出部56を設け、ケース2に検出部として機能する第1位置センサ51および第2位置センサ52を設けるものとしたが、検出部および被検出部の配置はこれらの構成に限定されない。例えば、シフトロッド41に第1位置センサ51および第2位置センサ52が設けられており、かつ、ケース2に第1突出部53や第2突出部54、第3突出部55あるいは突出部56を設けるものとしてもよい。
【0043】
(E)
前述の第1〜第4実施形態では、検出部および被検出部の配置の例および検出結果の組み合わせをいくつか説明しているが、他の配置および検出信号の組み合わせもあり得る。例えば、図5(D)に示す検出結果の組み合わせでは、第2速位置P2の状態で第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力するが、第1速位置P1の状態で第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力する構成にしてもよい。この場合、例えば、第2速位置P2の状態では第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力するが、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0044】
(F)
前述の第1〜第4実施形態では、第1位置センサ51および第2位置センサ52は制御装置57へ電流を出力するが、第1位置センサ51および第2位置センサ52が電圧を出力してもよい。この場合、第1位置センサ51および第2位置センサ52では、検出回路で誘起された電流が抵抗により電圧に変換される。
【産業上の利用可能性】
【0045】
本発明に係るシフト位置検出装置は小型化が可能であるため、本発明は変速機の分野において有用である。
【符号の説明】
【0046】
1 変速機
2 ケース(第1部材または第2部材の一例)
3 入力シャフト
4 シフト操作機構
41 シフトロッド(第1部材または第2部材の一例)
5、105、205、305 シフト位置検出装置
51 第1位置センサ(第1検出部の一例)
52 第2位置センサ(第2検出部の一例)
53 第1突出部(被検出部の一例)
54 第2突出部(被検出部の一例)
55 第3突出部(被検出部の一例)
57 制御装置(位置判定部の一例)
450 位置検出センサ
451 第1センサ部(第1検出部の一例)
452 第2センサ部(第2検出部の一例)
453 マグネット
454 磁性体
553 第1凹部(被検出部の一例)
554 第2凹部(被検出部の一例)
【技術分野】
【0001】
本発明は、変速機のシフト位置を検出するためのシフト位置検出装置に関する。
【背景技術】
【0002】
変速機のシフトレバーの位置(以下、シフト位置ともいう)がどの位置にあるのかを検出するために、シフト位置検出装置が知られている。例えば、シフト位置検出装置は、ケースに設けられた3つの検出センサと、シフトロッドに設けられた被検出部と、を有している。シフトロッドがケースに対して移動すると、被検出部の位置が変化し、3つの検出センサのうち1つにより被検出部の位置が検出される。これにより、ケースに対するシフトロッドの3種類の位置を検出することができる(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開昭62−149659号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載のシフト位置検出装置では、3種類のシフト位置を3つの検出センサを用いて検出しているため、検出センサを設置するスペースが大きくなり、シフト位置検出装置が大型化してしまう。
本発明の課題は、小型化が可能なシフト位置検出装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係るシフト位置検出装置は、第1部材と、第2部材と、少なくとも1つの被検出部と、第1検出部と、第2検出部と、を備えている。第2部材は第1部材に対して移動可能に配置されている。被検出部は第2部材に設けられている。第1検出部は、第1部材に設けられており、被検出部が第1検出領域内に配置されていることを検出する。第2検出部は、第1部材に設けられており、被検出部が第2検出領域内に配置されていることを検出する。位置判定部は、第1検出部および第2検出部の検出結果のみに基づいて第1部材に対する第2部材の位置を判定する。
このシフト位置検出装置では、被検出部が第1検出領域内に配置されていることが第1検出部により検出され、被検出部が第2検出領域内に配置されていることが第2検出部により検出される。第1および第2検出部の検出結果のみに基づいて、位置判定部により第1部材に対する第2部材の複数の位置が判定されるため、3つ以上の検出部が設けられている場合に比べて、第1部材に対する第2部材の位置検出を簡素な構成により実現することができる。つまり、これらの構成により、シフト位置検出装置の小型化が可能となる。
【発明の効果】
【0006】
本発明であれば、小型化が可能なシフト位置検出装置を提供できる。
【図面の簡単な説明】
【0007】
【図1】変速機の概略断面図
【図2】シフト操作機構およびメインシャフトの分解斜視図
【図3】シフト位置検出装置の概略構成図
【図4】(A)〜(D)シフト位置検出装置の動作説明図(第1実施形態)
【図5】(A)〜(D)シフト位置検出装置の動作説明図(第2実施形態)
【図6】(A)〜(D)シフト位置検出装置の動作説明図(第3実施形態)
【図7】(A)〜(D)シフト位置検出装置の動作説明図(第4実施形態)
【図8】位置センサの概略構成図(他の実施形態)
【図9】被検出部の一例(他の実施形態)
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について説明する。
〔第1実施形態〕
<変速機の全体構成>
図1を用いて変速機1について説明する。図1は変速機1の概略断面図である。なお、図1において左右方向(回転軸A1に平行な方向)を軸方向とする。
変速機1は、5段変速が可能なFR(Front Engine Rear drive)車用の手動変速機である。具体的には図1に示すように、変速機1は主に、ケース2(第1部材または第2部材の一例)と、入力シャフト3と、メインシャフト8と、カウンタシャフト7と、を備えている。
入力シャフト3は、クラッチ装置(図示せず)を介してエンジン(図示せず)で発生した動力が伝達されるシャフトであり、回転軸A1を中心に回転可能なように軸受92を介してケース2により支持されている。
【0009】
メインシャフト8は、動力を出力するためのシャフトであり、回転軸A1を中心に回転可能なように軸受91を介してケース2により支持されている。メインシャフト8の前方側の端部は、入力シャフト3により回転可能に支持されている。
メインシャフト8には複数のギヤが固定配置あるいは回転可能に配置されていると共に、複数のシンクロ機構が固定配置されている。例えば、メインシャフト8には、第1速メインギヤG1と、第2速メインギヤG2と、シンクロ機構S1と、が固定されている。第1速メインギヤG1は、第1速走行時に使用されるギヤであり、カウンタシャフト7に固定された第1速カウンタギヤG11(後述)と噛み合っている。第2速メインギヤG2は、第2速走行時に使用されるギヤであり、カウンタシャフト7に固定された第2速カウンタギヤG12(後述)と噛み合っている。
【0010】
シンクロ機構S1は、第1速メインギヤG1または第2速メインギヤG2をメインシャフト8と連結するための機構である。例えば、図1および図2において、シンクロ機構S1のスリーブS11がメインシャフト8に対して右方向に移動すると、第1速メインギヤG1がメインシャフト8と連結される。また、スリーブS11がメインシャフト8に対して左方向に移動すると、第2速メインギヤG2がメインシャフト8に連結される。
このスリーブS11の軸方向の移動を操作するために、変速機1はシフト操作機構4を有している。図1および図2に示すように、シフト操作機構4は、シフトロッド41(第1部材または第2部材の一例)と、シフトフォーク42と、を有している。
シフトロッド41は、シフトレバー(図示せず)に機械的に連結されており、ケース2により軸方向に移動可能に支持されている。具体的には、シフトロッド41は、中心軸A3を有しており、中心軸A3に沿って移動可能となっている。変速機1には、ケース2に対してシフトロッド41を3種類の軸方向位置で保持するための保持機構(図示せず)が設けられている。この保持機構により、ケース2に対して第1速位置P1(第1位置の一例)、第2速位置P2(第2位置の一例)およびニュートラル位置PN(第3位置の一例)の3種類のシフト位置でシフトロッド41は保持され得る。
【0011】
第1速位置P1は、シンクロ機構S1により第1速メインギヤG1がメインシャフト8に連結されている状態でのシフトロッド41の位置である。第2速位置P2はシンクロ機構S1により第2速メインギヤG2がメインシャフト8に連結されている状態でのシフトロッド41の位置である。ニュートラル位置PNは、シンクロ機構S1により第1速メインギヤG1および第2速メインギヤG2がメインシャフト8に連結されていない状態でのシフトロッド41の位置である。
シフトロッド41にはシフトフォーク42が固定されている。シフトフォーク42は、スリーブS11の外溝S11aに嵌め込まれており、スリーブS11を軸方向に移動可能に構成されている。
ドライバーによりシフトレバーがニュートラルから第1速(1st)に操作されると、シフトロッド41およびシフトフォーク42がケース2に対して軸方向(より詳細には、図1の右方向)に移動し、シンクロ機構S1により第1速メインギヤG1がメインシャフト8に連結される。第1速メインギヤG1がメインシャフト8に連結された状態で、保持機構によりシフトロッド41がケース2に対して第1速位置P1で保持される。
【0012】
ドライバーによりシフトレバーが第1速からニュートラルへ操作されると、保持機構による保持状態が解除され、シフトロッド41がニュートラル位置PNに戻る。
また、ドライバーによりシフトレバーがニュートラルから第2速(2nd)に操作されると、シフトロッド41およびシフトフォーク42がケース2に対して軸方向(より詳細には、図1の左方向)に移動し、シンクロ機構S1により第2速メインギヤG2がメインシャフト8に連結される。第2速メインギヤG2がメインシャフト8に連結された状態で、保持機構によりシフトロッド41がケース2に対して第2速位置P2で保持される。
ドライバーによりシフトレバーが第2速からニュートラルへ操作されると、保持機構による保持状態が解除され、シフトロッド41がニュートラル位置PNに戻る。
このように、ドライバーは、シフト操作機構4を介して変速機1のシフト位置を第1速および第2速に変更することができる。なお、他のシフト位置については、第1速および第2速のための構成と実質的に同じであるため、詳細な説明は省略する。
【0013】
<シフト位置検出装置の構成>
変速機1のシフト位置を検出するために、変速機1にはシフト位置検出装置5が設けられている。本実施形態では、シフトロッド41の第1速位置P1、第2速位置P2およびニュートラル位置PNを検出するためのシフト位置検出装置5について説明する。
図3に示すように、シフト位置検出装置5は、第1突出部53(被検出部の一例)と、第2突出部54(被検出部の一例)と、第1位置センサ51(第1検出部の一例)と、第2位置センサ52(第2検出部の一例)と、シフト位置を判定する制御装置57(位置判定部の一例)と、を有している。
図2および図3に示すように、第1突出部53は、シフトロッド41に設けられた円柱状の部材であり、第1位置センサ51および第2位置センサ52により検出されるようにシフトロッド41から突出している。本実施形態では、第1突出部53は、シフトロッド41と一体形成されており、シフトロッド41とともに鉄などの磁性体により形成されている。
【0014】
図2および図3に示すように、第2突出部54は、シフトロッド41に設けられた円柱状の部材であり、第1位置センサ51および第2位置センサ52により検出されるようにシフトロッド41から突出している。本実施形態では、第2突出部54は、シフトロッド41と一体形成されており、シフトロッド41とともに鉄などの磁性体により形成されている。
第2突出部54は、第1突出部53と同じ形状を有しており、第1突出部53と軸方向に並んで配置されている。図2に示すように、シフトロッド41の中心軸A3周りにおける第2突出部54の円周方向位置は、第1突出部53の円周方向位置と同じに設定されている。
図3に示すように、第1位置センサ51は、第1検出領域D1内に磁性体が配置されていることを検出できる磁気センサであり、例えば、検出回路を含んだモジュールタイプである。図2および図3に示すように、第1位置センサ51は、概ね円柱状であり、図1に示すようにケース2に固定されている。第1位置センサ51は、シフトロッド41が軸方向に移動した際に第1突出部53や第2突出部54が第1検出領域D1内に配置されるように、第1突出部53および第2突出部54と近接可能な位置に配置されている。
【0015】
第1突出部53または第2突出部54が第1位置センサ51の第1検出領域D1内に配置されると、第1位置センサ51の近傍で磁界の変化が生ずる。第1位置センサ51は、この磁界の変化に応じて電流が誘起される検出回路(図示せず)を有しており、検出回路で誘起された電流を制御装置57へ出力する。制御装置57は、入力された電流に基づいて第1位置センサ51が磁性体を検出しているか否かを判定する。例えば、入力された電流のレベルが所定のレベルよりも高い場合は、第1位置センサ51が磁性体を検出している(ON)と制御装置57は判定し、入力された電流のレベルが所定のレベル以下の場合は、第1位置センサ51が磁性体を検出していない(OFF)と制御装置57は判定する。このように、第1突出部53および第2突出部54のうち一方が第1検出領域D1に配置されていることを、第1位置センサ51により検出することができる。
【0016】
図3に示すように、第2位置センサ52は、第2検出領域D2内に磁性体が配置されていることを検出できる磁気センサであり、例えば、検出回路を含んだモジュールタイプである。図2および図3に示すように、第1位置センサ51と同様に、第2位置センサ52は、概ね円柱状であり、図1に示すようにケース2に固定されている。第2位置センサ52は、シフトロッド41が軸方向に移動した際に第1突出部53や第2突出部54が第2検出領域D2内に配置されるように、第1突出部53および第2突出部54と近接可能な位置に配置されている。
第1突出部53または第2突出部54が第2位置センサ52の第2検出領域D2内に配置されると、第2位置センサ52の近傍で磁界の変化が生ずる。第2位置センサ52は、この磁界の変化に応じて電流が誘起される検出回路(図示せず)を有しており、検出回路で誘起された電流を制御装置57へ出力する。制御装置57は、入力された電流に基づいて第2位置センサ52が磁性体を検出しているか否かを判定する。例えば、入力された電流のレベルが所定のレベルよりも高い場合は、第2位置センサ52が磁性体を検出している(ON)と制御装置57は判定し、入力された電流が所定のレベル以下の場合は、第2位置センサ52が磁性体を検出していない(OFF)と制御装置57は判定する。このように、第1突出部53および第2突出部54のうち一方が第2検出領域D2に配置されていることを、第2位置センサ52により検出することができる。
【0017】
本実施形態では、シフトロッド41がニュートラル位置PNにあるときには、第1突出部53が第1位置センサ51の第1検出領域D1内に配置され、かつ、第2突出部54が第2位置センサ52の第2検出領域D2内に配置される。また、第1突出部53および第2突出部54の間の距離L2は、第1位置センサ51および第2位置センサ52の間の距離L1と同じである。さらに、距離L1およびL2は、シフトロッド41が第1速位置Pから第2速位置P2まで移動する際の移動距離に等しい。したがって、シフトロッド41が第1速位置P1にあるときには、第2突出部54が第1検出領域D1内に配置され、シフトロッド41が第2速位置P2にあるときには、第1突出部53が第2検出領域D2内に配置される。
ここで、距離L1は、第1位置センサ51の中心軸B1および第2位置センサ52の中心軸B2を基準として規定されている。距離L2は、第1突出部53の中心軸C1および第2突出部54の中心軸C2を基準に規定されている。
【0018】
また、ケース2に対するシフトロッド41の位置は、第1突出部53および第2突出部54の軸方向間の中心点Eを基準として説明する。中心点Eが第1位置センサ51および第2位置センサ52の軸方向間の中央に配置されている状態がニュートラル位置PNに対応している。
制御装置57は、エンジンや変速機1を制御する装置であり、第1位置センサ51および第2位置センサ52と電気的に接続されている。制御装置57は、例えば、CPU、RAMおよびROMを有するマイクロコンピュータであり、ROMに記憶されたプログラムがCPUに読み込まれることで様々な機能を実現し得る。
例えば、制御装置57は、シフトロッド41の位置を判定する機能を有している。具体的には、制御装置57は第1位置センサ51および第2位置センサ52から出力された検出結果に基づいてシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているかを判定する。検出部が2つであるため、第1位置センサ51の第1検出結果と第2位置センサ52の第2検出結果との組み合わせに基づいて、制御装置57はシフトロッド41の位置を判定し得る。
【0019】
<位置判定方法>
ここで、図4(A)〜(D)を用いて、シフト位置検出装置5による位置判定方法について説明する。
図4(A)に示すように、シフトロッド41がニュートラル位置PNに配置されている場合、第1位置センサ51は第1突出部53と近接しており、第2位置センサ52は第2突出部54と近接している。
この状態では、第1突出部53が第1位置センサ51の第1検出領域D1内に配置されていると共に、第2突出部54が第2位置センサ52の第2検出領域D2内に配置されているため、例えば第1位置センサ51および第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0020】
図4(B)に示すように、シフトロッド41が第1速位置P1に移動すると、第1突出部53および第2突出部54が第1位置センサ51および第2位置センサ52に対して軸方向に移動する。前述のように、距離L1が距離L2と同じであるため、シフトロッド41が第1速位置P1に移動すると、第1位置センサ51の第1検出領域D1内には第2突出部54が配置される。第1検出領域D1内に第2突出部54が配置されると、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力する。
一方、第2位置センサ52の第2検出領域D2内には第1突出部53および第2突出部54は配置されないため、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
図4(C)に示すように、シフトロッド41が第2速位置P2に移動すると、第1突出部53および第2突出部54が第1位置センサ51および第2位置センサ52に対して軸方向に移動する。前述のように、距離L1が距離L2と同じであるため、シフトロッド41が第2速位置P2に移動すると、第2位置センサ52の第2検出領域D2内には第1突出部53が配置される。第2検出領域D2内に第1突出部53が配置されると、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0021】
一方、第1位置センサ51の第1検出領域D1内には第1突出部53および第2突出部54は配置されないため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力する。
制御装置57は、第1位置センサ51および第2位置センサ52から出力される電流に基づいてシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているか否かを判定する。
具体的には、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力している場合は、図4(A)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置がニュートラル位置PNであると制御装置57は判定する。
【0022】
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、図4(B)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置が第1速位置P1であると制御装置57は判定する。
第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベルよりも高い電流を出力している場合は、図4(C)に示す位置にシフトロッド41が配置されているため、シフトロッド41の位置が第2速位置P2であると制御装置57は判定する。
このように、第1位置センサ51および第2位置センサ52の検出結果に基づいて、制御装置57はシフト位置を判定することができる。
【0023】
<変速機の動作>
次に、変速機1の動作について説明する。
車両のアイドリング状態では、例えば、第1位置センサ51および第2位置センサ52を用いて制御装置57により変速機1のシフト位置が監視される。具体的には、第1位置センサ51および第2位置センサ52から出力される電流が制御装置57により所定の周期で確認される。電流のレベルに基づいて、第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置にシフトロッド41が配置されているかが、制御装置57により所定の周期で判定される。
具体的には、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力している場合は、シフトロッド41がニュートラル位置PN(図4(A)に示す位置)に配置されている、つまりシフト位置がニュートラルである、と制御装置57により判定される。
【0024】
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、シフトロッド41が第1速位置P1(図4(B)に示す位置)に配置されている、つまりシフト位置が第1速である、と制御装置57により判定される。
第1位置センサ51が制御装置57へ所定のレベルよりも高い電流を出力しており、かつ、第2位置センサ52が制御装置57へ所定のレベル以下の電流を出力している場合は、シフトロッド41が第2速位置P2(図4(C)に示す位置)に配置されている、つまりシフト位置が第2速である、と制御装置57により判定される。
このように、変速機1のシフト位置がシフト位置検出装置5により判定され、これらの判定結果は、例えば、HSA(Hill Start Assist)およびHDC(Hill Decent Control)などのVDC(Vehicle Dynamics Control)に用いられる。
【0025】
例えば、HSAは登坂時の発進補助制御を行うシステムである。このシステムでは、登坂途中でドライバーブレーキにより車両が停止した後、ブレーキ液圧が所定の圧力に保持されるように各部が制御される。この結果、ドライバーブレーキが解除された際に坂道で車両が後退するのを防止できる。
また、HDCは、急降坂時にドライバーブレーキを用いて自動的に減速制御を行うシステムである。急降板時では、車両の速度が非常に低い場合(例えば、車両の速度が3〜7km/hである場合)、エンジンブレーキのみでは車両の速度が保持できず、車両の速度が上昇してしまう。このシステムでは、急降坂時に車両の速度が必要以上に上昇しないように、ブレーキ液圧を保持することで車両の速度が上がるのを抑制する。
これらHSAおよびHDCでは、前後進判断およびホイール端トルクの算出に変速機1のシフト位置が必要となるため、前述のシフト位置検出装置5での判定結果が利用され得る。
【0026】
<特徴>
以上に説明したシフト位置検出装置5の特徴は以下の通りである。
(1)
このシフト位置検出装置5では、第1突出部53および第2突出部54のうち一方が第1検出領域D1内に配置されていることが第1位置センサ51により検出され、第1突出部53および第2突出部54のうち一方が第2検出領域D2内に配置されていることが第2位置センサ52により検出される。このため、第1位置センサ51および第2位置センサ52の検出結果を利用して制御装置57によりケース2に対してシフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの位置に配置されているかを判定することができる。
【0027】
より詳細には、第1位置センサ51の第1検出結果と第2位置センサ52の第2検出結果との組み合わせに基づいて、制御装置57によりシフトロッド41の位置が判定されるため、2つのセンサのみで3つのシフト位置(第1速位置P1、第2速位置P2、ニュートラル位置PN)を検出することができる。
これにより、シフトロッド41の位置検出、つまり変速機1のシフト位置を簡素な構成により検出することができ、シフト位置検出装置5の小型化が可能となる。
(2)
このシフト位置検出装置5では、第1位置センサ51が第2突出部54を検出しており、かつ、第2位置センサ52が第1突出部53および第2突出部54のいずれも検出していない場合、ケース2に対してシフトロッド41が第1速位置P1に配置されていると制御装置57により判定される。
【0028】
また、第1位置センサ51が第1突出部53および第2突出部54のいずれも検出しておらず、かつ、第2位置センサ52が第1突出部53を検出している場合、ケース2に対してシフトロッド41が第2速位置P2に配置されていると制御装置57により判定される。
さらに、第1位置センサ51が第1突出部53を検出しており、かつ、第2位置センサ52が第2突出部54を検出している場合、ケース2に対してシフトロッド41がニュートラル位置PNに配置されていると制御装置57により判定される。
このように、2つの被検出部(第1突出部53および第2突出部54)および2つのセンサ(第1位置センサ51および第2位置センサ52)の配置を工夫することで、第1位置センサ51および第2位置センサ52の検出結果の組み合わせを3パターン確保することができる。これにより、3種類のシフト位置を2つのセンサのみで検出することができる。
【0029】
(3)
このシフト位置検出装置5では、シフトロッド41が第1速位置P1および第2速位置P2に配置されている状態で、第1位置センサ51および第2位置センサ52のうちいずれか一方が制御装置57へ所定のレベルよりも高い電流を出力する。このため、シフトロッド41が第1速位置P1および第2速位置P2に配置されている状態で、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベル以下の電流を出力する場合に比べて、第1速または第2速にギヤが入っていることを確実に把握することができ、ギヤが入っている状態で各部を制御したい場合(例えば、前述のHSAあるいはHDCを行う場合)に有効である。
特に、検出されるシフト位置が第1速位置P1および第2速位置P2であるため、低速時のシフト位置を検出したい前述のHSAあるいはHDCを行う場合に、このシフト位置検出装置5は非常に有効である。
【0030】
また、シフトロッド41がニュートラル位置PNに配置されている状態で、第1位置センサ51および第2位置センサ52がともに所定のレベルよりも高い電流を出力するため、ニュートラル位置PNで第1位置センサ51および第2位置センサ52が所定のレベル以下の電流を出力する場合に比べて、ニュートラル位置PNの状態も確実に把握することができる。すなわち、第1速位置P1、第2速位置P2およびニュートラル位置PNのいずれの状態にあるかを確実に把握することができ、シフト位置検出装置5の構成として、より好ましい。
(4)
このシフト位置検出装置5では、第1位置センサ51および第2位置センサ52が磁気センサであり、かつ、被検出部として機能する第1突出部53および第2突出部54が磁性体であるため、非接触でシフトロッド41の位置を検出することができる。これにより、第1位置センサ51、第2位置センサ52、第1突出部53および第2突出部54が摩耗して検出精度が低下するのを防止できる。
【0031】
(5)
このシフト位置検出装置5では、被検出部として機能する第1突出部53および第2突出部54がシフトロッド41から突出した凸部であるため、被検出部がシフトロッド41を削って形成された凹部である場合に比べて、シフトロッド41の強度の低下を防止できる。
(6)
このシフト位置検出装置5では、第1突出部53および第2突出部54の間の距離L2は、第1位置センサ51および第2位置センサ52の間の距離L1と同じであるため、確実に小型化を実現できる。
特に、距離L1およびL2が、シフトロッド41が第1速位置P1、第2速位置P2およびニュートラル位置PNに移動する際の移動距離L3に等しいため、例えば、後述する他の実施形態よりもシフト位置検出装置5の軸方向の寸法を短縮することができる。つまり、この構成であれば、より小型のシフト位置検出装置5を提供できる。
【0032】
なお、距離L1、L2および移動距離L3はそれぞれが完全に同じでなくても概ね同じであればよい。例えば、シフト位置検出装置5の検出性能を確保できる範囲内であれば、距離L1、L2および移動距離L3が若干異なっていてもよい。
〔第2実施形態〕
前述の第1実施形態以外に、次のような実施形態も考えられる。なお、以下の説明においては、第1実施形態の構成と実質的に同じ機能を有する構成については、同じ符号を使用し、その詳細な説明は省略する。
図5(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図5(A)に示すシフト位置検出装置105では、距離L2が距離L1と同じであるが、シフトロッド41がニュートラル位置PNに配置されている状態で、第1突出部53および第2突出部54に対して第1位置センサ51および第2位置センサ52の位置が軸方向にずれている。第1位置センサ51が第1突出部53に対してずれている距離は、シフトロッド41の移動距離L3と同じであり、さらに距離L1およびL2の半分である。つまり、移動距離L3は距離L1およびL2と異なっている。このため、第2突出部54が第1位置センサ51および第2位置センサ52の軸方向の中央に配置されている。
【0033】
この場合、図5(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52はともに制御装置57へ所定のレベル以下の電流を出力する。
一方、図5(B)に示すように、第1速位置P1では、第1位置センサ51は第2突出部54を検出するが、第2位置センサ52は第1突出部53および第2突出部54のいずれも検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力し、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
また、図5(C)に示すように、第2速位置P2では、第1位置センサ51が第1突出部53を検出し、かつ、第2位置センサ52が第2突出部54を検出する。このため、第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力する。
【0034】
以上に説明した検出結果の組み合わせに基づいて、制御装置57がシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置105の小型化が可能である。
〔第3実施形態〕
また、図6(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図6(A)に示すシフト位置検出装置205では、被検出部として1つの突出部56が設けられている。このシフト位置検出装置205は、図5(A)に示すシフト位置検出装置105の第1突出部53が省略された構成であると言える。
この場合、図6(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52はともに制御装置57へ所定のレベル以下の電流を出力する。
【0035】
一方、図6(B)に示すように、第1速位置P1では、第1位置センサ51は突出部56を検出するが、第2位置センサ52は突出部56を検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力するが、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
また、図6(C)に示すように、第2速位置P2では、第1位置センサ51は突出部56を検出しないが、第2位置センサ52は突出部56を検出する。このため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力するが、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
以上に説明した検出結果の組み合わせに基づいて、制御装置57はシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置205の小型化が可能である。
【0036】
〔第4実施形態〕
さらに、図7(A)〜(C)に示すような検出部および被検出部の配置も考えられる。具体的には図7(A)に示すシフト位置検出装置305では、3つの被検出部がシフトロッド41に設けられている。具体的には、このシフト位置検出装置305は、第1突出部53および第2突出部54に加えて、第3突出部55を有している。第3突出部55は第1突出部53および第2突出部54と同じ材質により形成されており、かつ、同じ形状を有している。
図7(A)に示すニュートラル位置PNの状態では、第1突出部53は第1位置センサ51の第1検出領域D1内に配置されており、第2突出部54は第2位置センサ52の第2検出領域D2内に配置されている。一方、第3突出部55は第1位置センサ51と第2位置センサ52との軸方向間の中央に配置されている。
【0037】
移動距離L3は、距離L2と同じであるが、距離L1とは異なる。距離L1は、距離L2および移動距離L3よりも長く設定されており、距離L2および移動距離L3の2倍である。
この場合、図7(A)に示すように、ニュートラル位置PNでは第1位置センサ51および第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
一方、図7(B)に示すように、第1速位置P1では、第1位置センサ51は第3突出部55を検出するが、第2位置センサ52は第1突出部53〜第3突出部55のいずれも検出しない。このため、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力し、かつ、第2位置センサ52は制御装置57へ所定のレベル以下の電流を出力する。
【0038】
また、図7(C)に示すように、第2速位置P2では、第1位置センサ51は第1突出部53〜第3突出部55のいずれも検出しないが、第2位置センサ52は第3突出部55を検出する。このため、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力し、かつ、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
以上に説明した検出結果の組み合わせに基づいて、制御装置57はシフトロッド41のシフト位置を判定する。このような構成であっても、2つの位置センサの検出結果のみでシフト位置を判定することができ、シフト位置検出装置305の小型化が可能である。
<他の実施形態>
本発明の具体的な構成は、前述の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で種々の変更および修正が可能である。
【0039】
(A)
前述の第1〜第4実施形態では、第1位置センサ51および第2位置センサ52が別体であるが、第1位置センサ51および第2位置センサ52が一体になっていてもよい。
例えば、図8に示す位置検出センサ450では、第1センサ部451と、第2センサ部452と、マグネット453と、磁性体454と、を有している。
第1センサ部451および第2センサ部452は、例えば磁気抵抗素子であり、検出回路(図示せず)に接続されている。第1センサ部451および第2センサ部452は、例えば前述の第1位置センサ51および第2位置センサ52に内蔵されているセンサ部と同じである。
マグネット453のシフトロッド41側には第1センサ部451が配置されている。磁性体454はマグネット453に固定されている。磁性体454のシフトロッド41側には第2センサ部452が配置されている。磁性体454は、マグネット453に固定された本体部454aと、本体部454aからシフトロッド41側に突出する突出部454bと、を有している。突出部454bの先端には第2センサ部452が固定されている。
【0040】
第1センサ部451とシフトロッド41との間の距離は、第2センサ部452とシフトロッド416との間の距離と概ね同じである。
この位置検出センサ450では、2つの位置センサが一体となっているため、構成の簡素化が可能となる。特に、前述のシフト位置検出装置5、105、205および305では、2つの位置センサを用いてシフト位置を検出しているため、2つの位置センサが一体となっている位置検出センサ450を用いることで、構成の簡素化が非常に効果的に行える。
(B)
前述の第1〜第4実施形態では、第1突出部53や第2突出部54、第3突出部55あるいは突出部56は、シフトロッド41と一体形成するものとしたが、これらの部材はシフトロッド41とは別体であってもよい。
【0041】
また、前述の第1〜第4実施形態では、第1突出部53や第2突出部54、第3突出部55あるいは突出部56はシフトロッド41から突出した部分としたがシフトロッド41から突出した部分であるが、被検出部はこのような構成に限定されない。例えば、図9に示すように、2つの被検出部がシフトロッド541に形成された第1凹部553および第2凹部554であってもよい。第1凹部553が第1位置センサ51に対向するように配置されると、第1位置センサ51は制御装置57へ所定のレベル以下の電流を出力し、第1凹部553が第1位置センサ51と対向せずに第1凹部553以外の部分が第1位置センサ51と対向するように配置されると、第1位置センサ51は制御装置57へ所定のレベルよりも高い電流を出力する。
この場合、第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力する場合、第1位置センサ51の第1検出領域D1内に第1凹部553あるいは第2凹部554が配置されていると判定できる。第2位置センサ52の場合も、これと同様である。
【0042】
この構成であっても、第1位置センサ51および第2位置センサ52の検出結果のみでシフト位置を判定することができ、シフト位置検出装置の小型化が可能となる。
(C)
前述の第1〜第4実施形態では、検出部として磁気センサである第1位置センサ51および第2位置センサ52が用いられているが、検出部は別の方式の位置センサであってもよい。例えば、非接触式の近接スイッチの場合は、静電容量形、超音波形および光電形の位置センサが検出部として考えられる。さらに、検出部は接触式の位置センサであってもよい。
(D)
前述の第1〜第4実施形態では、シフトロッド41に被検出部として機能する第1突出部53や第2突出部54、第3突出部55あるいは突出部56を設け、ケース2に検出部として機能する第1位置センサ51および第2位置センサ52を設けるものとしたが、検出部および被検出部の配置はこれらの構成に限定されない。例えば、シフトロッド41に第1位置センサ51および第2位置センサ52が設けられており、かつ、ケース2に第1突出部53や第2突出部54、第3突出部55あるいは突出部56を設けるものとしてもよい。
【0043】
(E)
前述の第1〜第4実施形態では、検出部および被検出部の配置の例および検出結果の組み合わせをいくつか説明しているが、他の配置および検出信号の組み合わせもあり得る。例えば、図5(D)に示す検出結果の組み合わせでは、第2速位置P2の状態で第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力するが、第1速位置P1の状態で第1位置センサ51および第2位置センサ52がともに制御装置57へ所定のレベルよりも高い電流を出力する構成にしてもよい。この場合、例えば、第2速位置P2の状態では第1位置センサ51が制御装置57へ所定のレベル以下の電流を出力するが、第2位置センサ52は制御装置57へ所定のレベルよりも高い電流を出力する。
【0044】
(F)
前述の第1〜第4実施形態では、第1位置センサ51および第2位置センサ52は制御装置57へ電流を出力するが、第1位置センサ51および第2位置センサ52が電圧を出力してもよい。この場合、第1位置センサ51および第2位置センサ52では、検出回路で誘起された電流が抵抗により電圧に変換される。
【産業上の利用可能性】
【0045】
本発明に係るシフト位置検出装置は小型化が可能であるため、本発明は変速機の分野において有用である。
【符号の説明】
【0046】
1 変速機
2 ケース(第1部材または第2部材の一例)
3 入力シャフト
4 シフト操作機構
41 シフトロッド(第1部材または第2部材の一例)
5、105、205、305 シフト位置検出装置
51 第1位置センサ(第1検出部の一例)
52 第2位置センサ(第2検出部の一例)
53 第1突出部(被検出部の一例)
54 第2突出部(被検出部の一例)
55 第3突出部(被検出部の一例)
57 制御装置(位置判定部の一例)
450 位置検出センサ
451 第1センサ部(第1検出部の一例)
452 第2センサ部(第2検出部の一例)
453 マグネット
454 磁性体
553 第1凹部(被検出部の一例)
554 第2凹部(被検出部の一例)
【特許請求の範囲】
【請求項1】
互いに相対移動可能に配置された第1および第2部材と、
前記第2部材に設けられた少なくとも1つの被検出部と、
前記第1部材に設けられ、前記被検出部が第1検出領域内に配置されていることを検出する第1検出部と、
前記第1部材に設けられ、前記被検出部が第2検出領域内に配置されていることを検出する第2検出部と、
前記第1検出部および前記第2検出部の検出結果のみに基づいて前記第1部材に対する前記第2部材の位置を判定する位置判定部と、
を備えたシフト位置検出装置。
【請求項2】
前記位置判定部は、前記第1検出部の第1検出結果と前記第2検出部の第2検出結果との組み合わせに基づいて前記第2部材の位置を判定する、
請求項1に記載のシフト位置検出装置。
【請求項3】
前記位置判定部は、前記第1検出部が前記被検出部を検出しており、かつ、前記第2検出部が前記被検出部を検出していない場合、前記第1部材に対して前記第2部材が第1位置に配置されていると判定し、前記第1検出部が前記被検出部を検出しておらず、かつ、前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第2位置に配置されていると判定し、前記第1検出部および前記第2検出部が前記被検出部を検出している、あるいは、検出していない場合、前記第1部材に対して前記第2部材が第3位置に配置されていると判定する、
請求項1または2に記載のシフト位置検出装置。
【請求項4】
前記位置判定部は、前記第1検出部および前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が前記第3位置に配置されていると判定する、
請求項3に記載のシフト位置検出装置。
【請求項5】
前記位置判定部は、前記第1検出部および前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第2位置に配置されていると判定し、前記第1検出部および前記第2検出部のうち一方が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第1位置に配置されていると判定し、前記第1検出部および前記第2検出部が前記被検出部を検出していない場合、前記第1部材に対して前記第2部材が第3位置に配置されていると判定する、
請求項1または2に記載のシフト位置検出装置。
【請求項6】
前記第1検出部および前記第2検出部は、磁気センサであり、
前記被検出部は、磁性体である、
請求項1から5のいずれかに記載のシフト位置検出装置。
【請求項7】
前記第1検出部は、マグネットと、前記マグネットの前記被検出部側に配置された第1センサ部と、を有しており、
前記第2検出部は、前記マグネット部に固定され磁性を有する磁性体と、前記磁性体の前記被検出部側に配置された第2センサ部と、を有している、
請求項1から6のいずれかに記載のシフト位置検出装置。
【請求項8】
前記被検出部は、前記第2部材と一体形成された凸部または凹部である、
請求項1から7のいずれかに記載のシフト位置検出装置。
【請求項9】
前記第1部材は、変速機のケースであり、
前記第2部材は、前記ケースに移動可能に支持されたシフトロッドである、
請求項1から8に記載のシフト位置検出装置。
【請求項1】
互いに相対移動可能に配置された第1および第2部材と、
前記第2部材に設けられた少なくとも1つの被検出部と、
前記第1部材に設けられ、前記被検出部が第1検出領域内に配置されていることを検出する第1検出部と、
前記第1部材に設けられ、前記被検出部が第2検出領域内に配置されていることを検出する第2検出部と、
前記第1検出部および前記第2検出部の検出結果のみに基づいて前記第1部材に対する前記第2部材の位置を判定する位置判定部と、
を備えたシフト位置検出装置。
【請求項2】
前記位置判定部は、前記第1検出部の第1検出結果と前記第2検出部の第2検出結果との組み合わせに基づいて前記第2部材の位置を判定する、
請求項1に記載のシフト位置検出装置。
【請求項3】
前記位置判定部は、前記第1検出部が前記被検出部を検出しており、かつ、前記第2検出部が前記被検出部を検出していない場合、前記第1部材に対して前記第2部材が第1位置に配置されていると判定し、前記第1検出部が前記被検出部を検出しておらず、かつ、前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第2位置に配置されていると判定し、前記第1検出部および前記第2検出部が前記被検出部を検出している、あるいは、検出していない場合、前記第1部材に対して前記第2部材が第3位置に配置されていると判定する、
請求項1または2に記載のシフト位置検出装置。
【請求項4】
前記位置判定部は、前記第1検出部および前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が前記第3位置に配置されていると判定する、
請求項3に記載のシフト位置検出装置。
【請求項5】
前記位置判定部は、前記第1検出部および前記第2検出部が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第2位置に配置されていると判定し、前記第1検出部および前記第2検出部のうち一方が前記被検出部を検出している場合、前記第1部材に対して前記第2部材が第1位置に配置されていると判定し、前記第1検出部および前記第2検出部が前記被検出部を検出していない場合、前記第1部材に対して前記第2部材が第3位置に配置されていると判定する、
請求項1または2に記載のシフト位置検出装置。
【請求項6】
前記第1検出部および前記第2検出部は、磁気センサであり、
前記被検出部は、磁性体である、
請求項1から5のいずれかに記載のシフト位置検出装置。
【請求項7】
前記第1検出部は、マグネットと、前記マグネットの前記被検出部側に配置された第1センサ部と、を有しており、
前記第2検出部は、前記マグネット部に固定され磁性を有する磁性体と、前記磁性体の前記被検出部側に配置された第2センサ部と、を有している、
請求項1から6のいずれかに記載のシフト位置検出装置。
【請求項8】
前記被検出部は、前記第2部材と一体形成された凸部または凹部である、
請求項1から7のいずれかに記載のシフト位置検出装置。
【請求項9】
前記第1部材は、変速機のケースであり、
前記第2部材は、前記ケースに移動可能に支持されたシフトロッドである、
請求項1から8に記載のシフト位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−160104(P2010−160104A)
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願番号】特願2009−3661(P2009−3661)
【出願日】平成21年1月9日(2009.1.9)
【出願人】(390009896)愛知機械工業株式会社 (190)
【Fターム(参考)】
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願日】平成21年1月9日(2009.1.9)
【出願人】(390009896)愛知機械工業株式会社 (190)
【Fターム(参考)】
[ Back to top ]