
シミュレーションデータ生成装置およびシミュレーションデータ生成プログラム
【課題】シミュレーションプログラムによるシミュレーション環境をCADデータから容易に生成することで、作業時間の短縮とシミュレーションの精度向上を図ることができるシミュレーションデータ生成装置およびシミュレーションデータ生成プログラムを提供する。
【解決手段】コンピュータにて、3次元CADプログラムとシミュレーションデータ生成プログラムとが動作することで、3次元CAD装置と、シミュレーションデータ生成装置として機能する。シミュレーションデータ生成装置では、解析制御手段21が、3次元CADデータにて表現された動作装置を、3次元CAD装置により移動させ、始点座標データと終点座標データとを得る。そして、これらの座標データから、設定データ生成手段22が、固定部品を示す主を割り当て、可動部品を示す従を割り当てることで、シミュレーションプログラムが使用する部品主従データを設定データとして生成する。
【解決手段】コンピュータにて、3次元CADプログラムとシミュレーションデータ生成プログラムとが動作することで、3次元CAD装置と、シミュレーションデータ生成装置として機能する。シミュレーションデータ生成装置では、解析制御手段21が、3次元CADデータにて表現された動作装置を、3次元CAD装置により移動させ、始点座標データと終点座標データとを得る。そして、これらの座標データから、設定データ生成手段22が、固定部品を示す主を割り当て、可動部品を示す従を割り当てることで、シミュレーションプログラムが使用する部品主従データを設定データとして生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、構成部品(構成要素)の3次元イメージを示す3次元CADデータに基づいて、各構成部品の動作シミュレーションするための設定データを生成するシミュレーションデータ生成装置およびシミュレーションデータ生成プログラムに関するものである。
【背景技術】
【0002】
3次元CADデータに基づいてシミュレーションを行うものとして、例えば、特許文献1,2に記載されたものが知られている。
この特許文献1に記載の実装置の動作シミュレーションシステムには、三次元CADで作成した仮想作動装置モデルの画像を、可動部品の画像または可動組立体の画像と他の部品の画像との近接および衝突を判断しながら、表示体に表示させるものである。
【0003】
特許文献2に記載のシミュレーションモデル生成用データ作成装置には、処理対象の製品を構成する部品のCADデータに基づいて、シミュレーションを行うときに必要となる部品の持つ解析データを抽出して、それらの解析データを合成することでその製品のシミュレーションモデルの元になるデータを作成するというものである。この特許文献2では、シミュレーションモデルの元になるデータを作成するときに、解析データから削除されてしまう部品の持つネジやネジ穴や突起部などのような微小部品の中心座標を取得して、それに対して位置名を割り当てて、それらの位置名と中心座標とに基づいて解析データを合成する処理を行っている。
【0004】
このように3次元CADデータに基づいてシミュレーションを行うような技術が開示されている。例えば、製造装置をシミュレーションする場合には、まず、製造装置の各部品の3次元CADデータを3次元CADプログラムにより作成する。この3次元CADプログラムでは、各部品の輪郭を定義するための座標データと、部品同士の面の位置関係が移動可能か否かの自由度を示す拘束データなどがCADデータとして生成される。シミュレーションプログラムでは、このCADデータに基づいて仮想的に各部品を、ラダー言語などのプログラム言語により記述された動作プログラムに基づいて動作させて、製造装置の各部品の干渉、ワークの搬送や製造具合などを検証している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−62753号公報
【特許文献2】特開2007−172433号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、シミュレーションプログラムでは、3次元CADデータとして入力される座標データと拘束データだけでは、構成部品同士の動作に関する情報が欠落しているため、構成部品が組み合わされた装置のいずれかの部品が固定部品なのか、または可動部品なのか判別が付かないため、直ちにシミュレーションプログラムによるシミュレーションができない。従って、現状では、シミュレーションするために必要な設定データを、操作者は手作業により入力している状態である。この手作業は、シミュレーションする構成部品の数が多ければ多いほど数多くなり、時間を要するだけでなく、設定ミスも多くなるおそれがある。
【0007】
そこで本発明は、シミュレーションプログラムによるシミュレーション環境をCADデータから容易に生成することで、作業時間の短縮とシミュレーションの精度向上を図ることができるシミュレーションデータ生成装置およびシミュレーションデータ生成プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のシミュレーションデータ生成装置は、固定部品と可動部品とから構成されたシミュレーションの対象装置を、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段と、前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主として割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従として割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段とを備えたことを特徴とする。
【0009】
本発明のシミュレーションデータ生成装置によれば、まず、解析制御手段が3次元CADデータにて表現された動作装置を動作させることにより始点座標データと終点座標データとを得る。次に、設定データ生成手段がこの始点座標データと終点座標データとから部品の位置が変化したか否かに基づいて固定部品と、この固定部品に対する可動部品とを判定する。そして、設定データ生成手段が固定部品を主とし、可動部品を従とした部品主従データを生成する。この部品主従データをシミュレーションプログラムが固定部品と可動部品とを識別するための設定データとすることで、手作業で設定することなく、シミュレーションプログラムによりシミュレーションを行うことができる。
【0010】
前記設定データ生成手段は、始点座標データおよび終点座標データから、移動方向と移動量とを示すベクトルデータを生成するのが望ましい。シミュレーションプログラムが設定データとして、ベクトルデータを必要とするときでも、設定データ生成手段が始点座標データおよび終点座標データからベクトルデータを生成することにより手作業で設定することなく、シミュレーションプログラムによりシミュレーションを行うことができる。
【0011】
前記解析制御手段は、対象装置が複数の動作装置を含む場合、前記複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させて、第1のマトリクス表として作成し、前記設定データ生成手段は、前記第1のマトリクス表から、動作装置に対応して位置が移動した部品(可動部品)数が多い順に列データを並び替えた第2のマトリクス表を作成し、前記第2のマトリクス表に基づいて、位置が移動した部品数の多い列データから順に、可動部品を位置が移動しなかった部品(固定部品)に関連付けて部品主従データを生成するのが望ましい。
対象装置が複数の動作装置を含む場合でも、解析制御手段が第1のマトリクス表を作成し、設定データ生成手段が第1のマトリクス表から第2のマトリクス表を作成した後、可動部品を固定部品に順次関連付けすることで、部品主従データを生成することができる。
【0012】
本発明のシミュレーションデータ生成装置は、コンピュータを、固定部品と可動部品とから構成され、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置を対象装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段、前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主と割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従と割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段として機能させるためのシミュレーションデータ生成プログラムにより実現することができる。
【発明の効果】
【0013】
本発明では、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを自動的に生成することができるので、3次元CADデータにシミュレーションをするための固定部品や可動部品を識別する設定データが含まれていなくても、シミュレーションプログラムによるシミュレーション環境を3次元CADデータから容易に生成することで、作業時間の短縮とシミュレーションの精度向上を図ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るシミュレーションシステムの構成を説明するための図である。
【図2】図1に示すシミュレーションシステムの第1のコンピュータの構成を説明するための図である。
【図3】シミュレーションの対象装置の一例としての直線移動するエアシリンダを示す斜視図である。
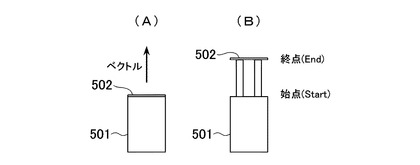
【図4】図3に示すエアシリンダを示す図であり、(A)は始点状態を示す斜視図、(B)は終点状態を示す斜視図である。
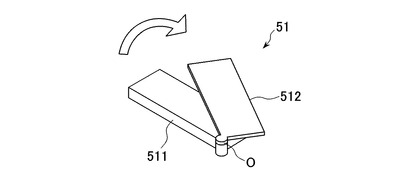
【図5】シミュレーションの対象装置の一例としての回転移動するロータリーアクチュエータを使用した回転装置を示す斜視図である。
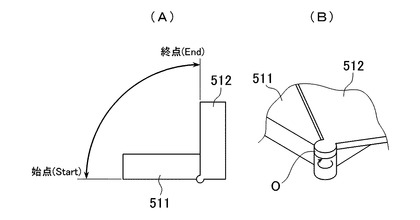
【図6】図3に示す回転装置を示す図であり、(A)は終点状態を示す斜視図、(B)は回転軸を示す部分拡大斜視図である。
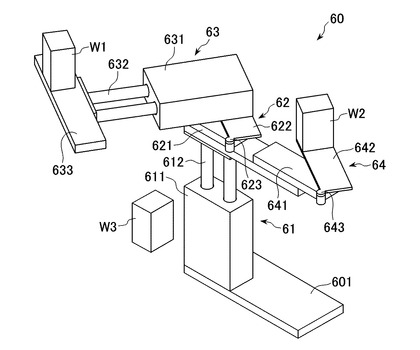
【図7】シミュレーションの対象装置の一例としての直線移動および回転移動をする複合装置を示す斜視図である。
【図8】図7に示す複合装置の始点状態を示す斜視図である。
【図9】複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させた第1のマトリクス表を示す図である。
【図10】図9に示す第1のマトリクス表から動作装置に対応して位置が移動した部品数が多い順に列データを並び替えた第2のマトリクス表を示す図である。
【図11】図10に示す第2のマトリクス表から可動部品をこの可動部品に対する固定部品に関連付けた部品主従データとすることを説明するための表である。
【発明を実施するための形態】
【0015】
本発明の実施の形態に係るシミュレーションシステムを図面に基づいて説明する。
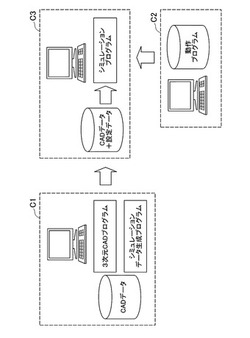
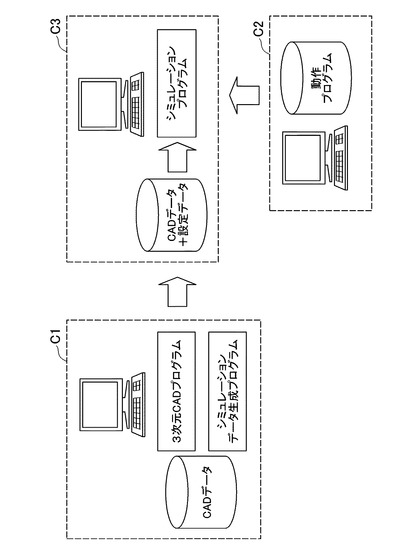
図1に示すように、シミュレーションシステムは、3次元CADプログラムが動作することで3次元CAD装置として機能すると共に、シミュレーションデータ生成プログラムが動作することで、シミュレーションデータ生成装置として機能する第1のコンピュータC1と、仮想的に製造装置をシミュレーションするときの動作を指定する動作プログラムを実行して、シミュレーションプログラムにコマンドを出力する第2のコンピュータC2と、シミュレーションプログラムが動作するシミュレーション装置として機能する第3のコンピュータC3とを備えている。
【0016】
図1では、3次元CAD装置として機能するコンピュータと、シミュレーションデータ生成装置として機能するコンピュータとを同じコンピュータとしているが、異なるコンピュータとしてもよい。また、第1のコンピュータC1と第3のコンピュータC3とを同じコンピュータとしてもよい。
【0017】
第1のコンピュータC1から第3のコンピュータC3へは、3次元として表現された3次元CADデータと、シミュレーションデータ生成プログラムにより生成された設定データが渡される。この3次元CADデータは、3次元CADプログラムを操作して装置を3次元的に表現されたデータで、各構成部品の輪郭を示す座標データと、接する構成部品同士のある2つの面同士が移動可能か否かの自由度を示す拘束データ等が含まれる。これらのデータは、同じコンピュータであれば、ハードディスク装置を介して渡すことが可能であるが、異なるコンピュータであれば、USBメモリや光ディスク、フレキシブルディスクを介在させたり、LAN経由でサーバを介してファイルを参照させたりしてもよい。
また、第2のコンピュータC2から第3のコンピュータC3へ発行されるコマンドは、LAN経由とすることができる。
【0018】
例えば、3次元CADプログラムは、オートデスク社製のオートデスクインベンターが使用できる。また、シミュレーションプログラムは、ダイレクトX(登録商標)環境で動作するものが使用できる。
【0019】
ここで、第1のコンピュータC1を3次元CAD装置およびシミュレーションデータ生成装置として機能させたときの構成について、図2に基づいて説明する。
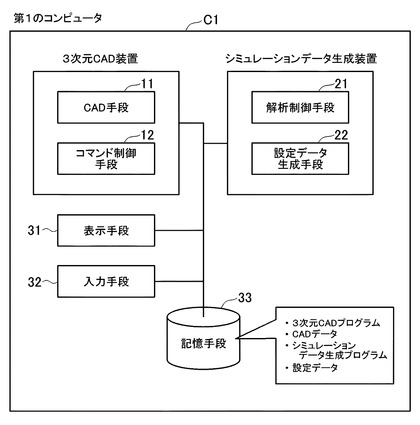
図2に示す第1のコンピュータC1は、3次元CAD装置を構成するCAD手段11おおよびコマンド制御手段12と、シミュレーションデータ生成装置を構成する解析制御手段21および設定データ生成手段22と、表示手段31と、入力手段32と、記憶手段33とを備えている。
【0020】
CAD手段11は、3次元イメージとして装置を作図したり、装置を構成する部品を移動させたりする機能を備えている。コマンド制御手段12は、部品の移動を指示する制御コマンドを受信して解析し、CAD手段11に指示を出力する機能を備えている。
解析制御手段21は、構成部品を仮想的に動作させて構成部品の位置関係を解析する機能を備えている。設定データ生成手段22は、解析制御手段21からの解析結果に基づいて生成データを作成する機能を備えている。
【0021】
表示手段31は、操作画面を表示するもので、CRTやLCD、有機ELディスプレイなどが使用できる。入力手段32は、シミュレーションデータ生成プログラムを起動終了したり、操作したりするときに使用されるもので、キーボードやマウス、タブレット、ジョイスティックなどが使用できる。
記憶手段33は、3次元CADデータ、設定データなどの他に、各種のプログラムを格納するための不揮発性メモリである。記憶手段33は、コンピュータに設けられたハードディスクドライブとすることができる。
【0022】
以上のように構成された本発明の実施の形態に係るシミュレーションデータ生成装置として機能するシミュレーションデータ生成プログラムの動作を図面に基づいて説明する。
シミュレーションを行う対象装置の動作として、大別すると直線移動と回転移動の2つである。複雑な装置であっても、この直線移動と回転移動との組み合わせにより動作を実現することができる。従って、この直線移動と回転移動を行う対象装置を例に、シミュレーションデータ生成プログラムの動作を説明する。
【0023】
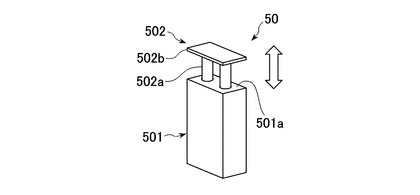
まず、シミュレーションの対象装置として、直線移動を行う動作装置である図3に示すエアシリンダ50を単純モデル化したものに基づいて説明する。例えば、図3に示すエアシリンダ50では、2個の構成部品のうち一方の構成部品であるシリンダ本体501と、他方の構成部品である伸縮部502とから構成されている。
シリンダ本体501は、直方体状のケーシングにシリンダが内蔵され、上面に伸縮部502が設けられている。伸縮部502は、2本のロッド502aの先端にテーブル502bが設けられている。
【0024】
3次元CADデータでは、このエアシリンダ50のシリンダ本体501と伸縮部502とのそれぞれの輪郭を示す座標データと、シリンダ本体501と伸縮部502との向き合う面(上面501aとテーブル502b)の自由度を示す拘束データとが定義されている。図3においては、シリンダ本体501の上面501aとテーブル502bの底面とは、上下方向のみが許容され、スライド方向は規制されている旨の拘束データが定義されている。なお、初期状態では、シリンダ本体501の上面501aと伸縮部502のテーブル502aとは隙間無しに設定されている。
【0025】
解析制御手段21は、シリンダ本体501と伸縮部502との間の隙間が所定距離となるように、CAD手段11にコマンドを発行する。図4(A)および同図(B)に示すようにCAD手段11では、シリンダ本体501と伸縮部502とを拘束データに準じて移動させる。この場合にはシリンダ本体501と伸縮部502とを離間させる。そして、CAD手段11は、シリンダ本体501と伸縮部502との位置を示す座標データを、シミュレーションデータ生成装置へ出力する。
【0026】
例えば、シリンダ本体501の移動前の任意の座標データ(始点座標データ)が(x11,y11,z11)であり、伸縮部502の移動前の任意の座標データが(x21,y21,z21)であったとする。そして、移動後では、シリンダ本体501の座標データ(終点座標データ)が(x11,y11,z11)、伸縮部502が(x22,y22,z22)であったとする。
【0027】
解析制御手段21は、移動後の座標データが、変化しなかった場合は固定部品、変化した場合は、この固定部品に対する可動部品であると判定している。従って、解析制御手段21は、シリンダ本体501と伸縮部502とを離間させることにより移動した座標データから、移動したのが伸縮部502、移動しなかったのがシリンダ本体501であると判定することができる。
設定データ生成手段22は、この判定結果に基づいて、固定部品を親または主(上位を示すデータ)、可動部品を子または従(下位を示すデータ)とする親子関係(主従関係)を示す部品主従データを設定データとして生成する。
【0028】
従って、設定データ生成手段22はシリンダ本体501に上位(主)であることを示す「−1」を割り当てる。また、伸縮部502はシリンダ本体501に対して下位(従)であることを示す「0」を割り当てる。
【0029】
また、設定データ生成手段22は、伸縮部502の最初の位置を始点とし、移動後の位置を終点として、移動方向と移動量とからベクトルデータを生成して設定データに含める。このベクトルデータは、シミュレーションプログラムが、シミュレーション環境として必要としているために、生成されるもので、可動部品の始点座標データと終点座標データとでシミュレーションが行えるものであれば、ベクトルデータは生成しなくてもよい。
【0030】
このようにして、シミュレーションの際に3次元CADデータだけでは、シリンダ本体501または伸縮部502の輪郭を座標データにより定義するしかなく、いずれの構成部品が移動するかが分からないため、エアシリンダ50のシミュレーションに際しては手作業により割り当てをしていたが、エアシリンダ50の3次元CADデータに部品主従データを割り当て付加することにより、シミュレーションの対象装置を構成するそれぞれの構成部品について部品主従データにより固定部品かまたは移動部品かが判別できるので、手作業による設定データの入力が省略できる。従って、大幅な作業時間の短縮を図ることができる。
【0031】
次に、シミュレーションの対象装置として、回転移動を行う動作装置である図5に示すロータリーアクチュエータによる回転装置を単純モデル化したものを例に説明する。なお、図5においてはロータリーアクチュエータについては図示していない。
図5に示す回転装置51は、2個の構成部品のうち一方の構成部品である第1の板状部品511と、ロータリーアクチュエータにより回転する他方の構成部品である第2の板状部品512とから構成されている。
回転装置51は、回転軸Oに設けられたロータリーアクチュエータを中心に第2の板状部品512が第1の板状部品511に対して円弧を描きながら回転するように接続されている。
【0032】
3次元CADデータでは、この回転装置51の第1の板状部品511と第2の板状部品512とのそれぞれの輪郭を示す座標データと、第1の板状部品511と第2の板状部品512との向き合う面の自由度を示す拘束データとが定義されている。図5においては、第1の板状部品511と第2の板状部品512とを接続する回転軸Oが第2の板状部品512に対して自由度があることが定義されることで、上下方向が拘束され、回転方向は規制されている旨の拘束データが定義されている。なお、初期状態では、第1の板状部品511と第2の板状部品512とは重なり合う状態に設定されている。
【0033】
解析制御手段21は、図6(A)および同図(B)に示すように、第1の板状部品511と第2の板状部品512との間の隙間が所定距離となるように、CAD手段11にコマンドを発行する。CAD手段11では、第1の板状部品511と第2の板状部品512とを拘束データに準じて離間させる。そして、CAD手段11は、第1の板状部品511と第2の板状部品512との位置を示す座標データを、シミュレーションデータ生成装置へ出力する。
【0034】
解析制御手段21は、第1の板状部品511と第2の板状部品512とを離間させることにより移動した座標データから、移動したのが第2の板状部品512、移動しなかったのが第1の板状部品511であると判定することができる。
設定データ生成手段22は、この判定結果に基づいて、固定部品である第1の板状部品511に上位であることを示す「−1」を割り当てる。また、第1の板状部品511に対する可動部品となる第2の板状部品512は第1の板状部品に対して下位あることを示す「0」を割り当てた部品主従データを生成する。
【0035】
また、設定データ生成手段22は、伸縮部502の最初の位置を始点とし、移動後の位置を終点として、移動方向と移動量から軸ベクトルデータを生成する。また、設定データ生成手段22は、回転軸Oの座標を、移動前(始点座標データ)と移動後(終点座標データ)とから所定の行列計算を行って算出し、回転軸データとして生成する。
この軸ベクトルデータや回転軸データは、シミュレーションプログラムが、シミュレーション環境として必要としているために、生成されるもので、可動部品の始点座標データと終点座標データとでシミュレーションが行えるものであれば生成しなくてもよい。
このように回転移動を行う回転装置51であっても、3次元CADデータに部品主従データを割り当て付加することにより手作業による設定データの入力が省略できる。
【0036】
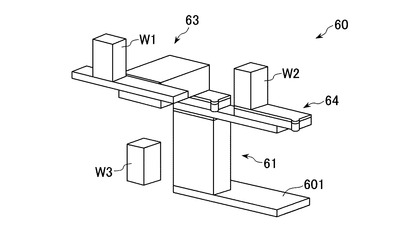
次に、直線移動と回転運動との両方の動作装置を備えた複雑な動作をする複合装置を例に、図7から図11に基づいて説明する。
図7に示す複合装置60は、ベース盤601と、第1のエアシリンダ61と、第1のエアシリンダ61上に配置された第1の回転装置62と、第1の回転装置62に接続された第2のエアシリンダ63と、第1のエアシリンダ61上に配置された第2の回転装置64とを備えた複数の装置から構成されている。
【0037】
ベース盤601は板状に形成され、床面に拘束されたものである。
第1のエアシリンダ61は、図3に示すエアシリンダ50と同様に、シリンダ本体611と伸縮部612とから構成されている。
第1の回転装置62は、第1のエアシリンダ61の伸縮部612上の一方の端部に配置され、図5に示す回転装置51と同様に、第1の板状部品621と第2の板状部品622とから構成されている。第1の板状部品621と第2の板状部品622とは回転軸623を中心に回転する。
【0038】
第2のエアシリンダ63は、第1のエアシリンダ61と同様に、シリンダ本体631と伸縮部632とから構成されている。第2のエアシリンダ63は、シリンダ本体631が第1の回転装置62の第2の板状部品622に拘束されている。伸縮部632には、第1のワークW1を載置するためのテーブル部633が設けられている。
第2の回転装置64は、第1のエアシリンダ61の伸縮部612上の他方の端部に配置され、図5に示す回転装置51と同様に、第1の板状部品641と第2の板状部品642とから構成されている。第1の板状部品641と第2の板状部品642とは回転軸643を中心に回転する。第2の板状部品642上には、第2のワークW2が載置されている。
また、複合装置60とは別に、第3のワークW3が配置されている。
【0039】
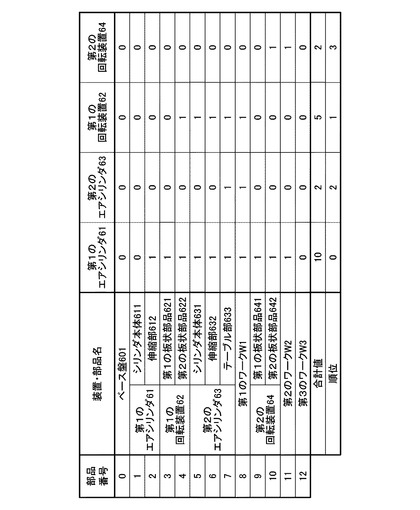
このように構成される複合装置60について、解析制御手段21は、第1のエアシリンダ61、第2のエアシリンダ63、第1の回転装置62および第2の回転装置64を順に、図8に示す始点復帰状態から終点まで各装置をCAD手段11にコマンドを発行して移動させる。そして、各部品について、移動した部品に「1」を、移動しなかった部品に「0」を付与した列データを、各装置(動作装置)ごとに並べたマトリクス表(第1のマトリクス表)として作成し、それぞれの部品を識別する。このマトリクス表を図9に示す。図9に示すマトリクス表では、各部品を複合装置60が配置される設置面から順に並べられている。
【0040】
図9では、例えば、第1のエアシリンダ61を動作させても、ベース盤601と、第1のエアシリンダ61のシリンダ本体611は移動せず、他の部品は移動したことを示している。そして、第1のワークW1と第2のワークW2とは移動したが、第3のワークW3は移動しなかったことを示している。従って、図9に示すマトリクス表の縦列は、複合装置60を構成する一台の装置を動作させたときに一緒に移動する部品を示している。
【0041】
次に、このマトリクス表に基づいて、設定データ生成手段22は部品主従データを生成する。
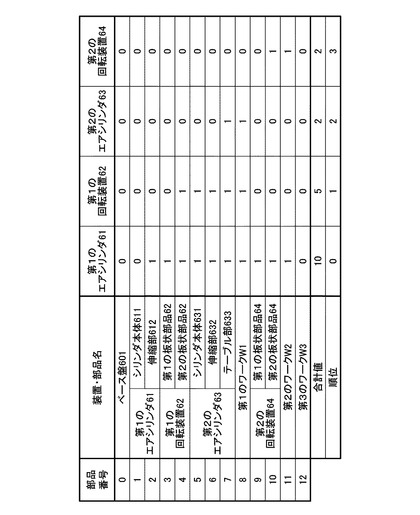
まず、設定データ生成手段22は、このマトリクス表の縦列に基づいて合計値(移動した部品数)を算出し、合計値が大きい順に縦列を並び替える。つまり、動作させた装置による影響の大きい順に並び替える。図10に並び替えたマトリクス表(第2のマトリクス表)を示す。図10では、第1の回転装置62と第2のエアシリンダ63が、図9に示すマトリクス表から入れ替わっている。
【0042】
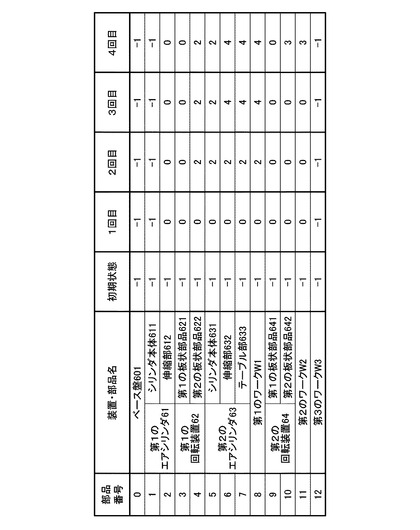
次に、設定データ生成手段22は、まず、初期状態として、図11に示すように、全ての部品に、上位(主)であることを示す「−1」を割り当てる。
次に、1回目として、順位が「0」の縦列、つまり、第1のエアシリンダ61を動作させたときに一緒に移動する部品(「1」が代入されている部品番号2〜11までの部品)について、その親(主)となる「−1」が代入されている最も小さい部品番号を代入する。この場合、初期状態では全部が「−1」であるため、ベース盤601を示す部品番号0が最も小さいので、「0」を代入する。
【0043】
次に、2回目として、順位が「1」の縦列、つまり、第1の回転装置62を動作させたときに一緒に移動する部品(「1」が代入されている部品番号4〜8までの部品)について、1回目の終了時点では「0」が代入されているので、「0」が代入されている部品が親(主)となる。従って、親となる「0」が代入されている最も小さい部品番号を代入する。この場合、1回目の状態では、「0」が代入されている部品番号2〜11までの部品のうち第1のエアシリンダ61の伸縮部612を示す部品番号2が最も小さいので、「2」を代入する。
【0044】
次に、3回目として、順位が「2」の縦列、つまり、第2のエアシリンダ63を動作させたときに一緒に移動する部品(「1」が代入されている部品番号6〜8の部品)について、二回目の終了時点では「2」が代入されているので、「2」が代入されている部品が主となる。従って、主となる「2」が代入されている最も小さい部品番号を代入する。この場合、2回目の状態では、「2」が代入されている部品番号4〜8までの部品のうち第1の回転装置62の第2の板状部品622を示す部品番号4が最も小さいので、「4」を代入する。
【0045】
次に、4回目として、順位が「3」の縦列、つまり、第2の回転装置64を動作させたときに一緒に移動する部品(「1」が代入されている部品番号10,11の部品)について、4回目の終了時点では「0」が代入されているので、「0」が代入されている部品が主となる。従って、主となる「0」が代入されている最も小さい部品番号を代入する。この場合、3回目の状態では、「0」が代入されている部品番号2,3,9〜11のうち部品番号3が最も小さいので、「3」を代入する。
【0046】
このようにして部品番号を代入することで、従となる可動部品を主となる固定部品に関連付けすることで生成された部品主従データによれば、ベース盤601、第1のエアシリンダ61のシリンダ本体611とは並列的な位置関係にあり、これらを固定部品である主としたときに、第1のエアシリンダ61の伸縮部612と第1の回転装置62の第1の板状部品621と第2の回転装置64の第1の板状部品641とが、ベース盤601とシリンダ本体611とに対する可動部品である従となることがわかる。また、第1のエアシリンダ61の伸縮部612を固定部品である主としたときに、第1の回転装置62の第2の板状部品622と第2のエアシリンダ63のシリンダ本体631とが、伸縮部612と第1の板状部品621の可動部品である従となることがわかる。
このようにして、設定データ生成手段22が部品主従データを生成する。
シミュレーションプログラムが動作する第1のコンピュータC1では、手作業によるデータの設定なしに、3次元CADデータと共に、設定データ生成手段22が生成した設定データと、動作を制御するための制御プログラムとに基づいてシミュレーションを行うことができる。
【0047】
このようにして、複数の装置が組み合わさった複合装置60でも、部品主従データを生成することができるので、例えば、大規模で複雑な装置をシミュレーションする際に、手作業により設定が省略できるので、時間短縮を図ることができると共に、シミュレーションの精度向上を図ることができる。
【産業上の利用可能性】
【0048】
本発明は、3次元CADデータに基づいて、大規模で複雑な製造装置や検査装置、搬送装置など様々な装置をシミュレーションする際に好適である。
【符号の説明】
【0049】
C1 第1のコンピュータ
11 CAD手段
12 コマンド制御手段
21 解析制御手段
22 設定データ生成手段
31 表示手段
32 入力手段
33 記憶手段
C2 第2のコンピュータ
C3 第3のコンピュータ
50 エアシリンダ
501 シリンダ本体
501a 上面
502 伸縮部
502a ロッド
502b テーブル
51 回転装置
511 第1の板状部品
512 第2の板状部品
O 回転軸
60 複合装置
601 ベース盤
61 第1のエアシリンダ
611 シリンダ本体
612 伸縮部
62 第1の回転装置
621 第1の板状部品
622 第2の板状部品
623 回転軸
63 第2のエアシリンダ
631 シリンダ本体
632 伸縮部
633 テーブル部
64 第2の回転装置
641 第1の板状部品
642 第2の板状部品
643 回転軸
W1 第1のワーク
W2 第2のワーク
W3 第3のワーク
【技術分野】
【0001】
本発明は、構成部品(構成要素)の3次元イメージを示す3次元CADデータに基づいて、各構成部品の動作シミュレーションするための設定データを生成するシミュレーションデータ生成装置およびシミュレーションデータ生成プログラムに関するものである。
【背景技術】
【0002】
3次元CADデータに基づいてシミュレーションを行うものとして、例えば、特許文献1,2に記載されたものが知られている。
この特許文献1に記載の実装置の動作シミュレーションシステムには、三次元CADで作成した仮想作動装置モデルの画像を、可動部品の画像または可動組立体の画像と他の部品の画像との近接および衝突を判断しながら、表示体に表示させるものである。
【0003】
特許文献2に記載のシミュレーションモデル生成用データ作成装置には、処理対象の製品を構成する部品のCADデータに基づいて、シミュレーションを行うときに必要となる部品の持つ解析データを抽出して、それらの解析データを合成することでその製品のシミュレーションモデルの元になるデータを作成するというものである。この特許文献2では、シミュレーションモデルの元になるデータを作成するときに、解析データから削除されてしまう部品の持つネジやネジ穴や突起部などのような微小部品の中心座標を取得して、それに対して位置名を割り当てて、それらの位置名と中心座標とに基づいて解析データを合成する処理を行っている。
【0004】
このように3次元CADデータに基づいてシミュレーションを行うような技術が開示されている。例えば、製造装置をシミュレーションする場合には、まず、製造装置の各部品の3次元CADデータを3次元CADプログラムにより作成する。この3次元CADプログラムでは、各部品の輪郭を定義するための座標データと、部品同士の面の位置関係が移動可能か否かの自由度を示す拘束データなどがCADデータとして生成される。シミュレーションプログラムでは、このCADデータに基づいて仮想的に各部品を、ラダー言語などのプログラム言語により記述された動作プログラムに基づいて動作させて、製造装置の各部品の干渉、ワークの搬送や製造具合などを検証している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−62753号公報
【特許文献2】特開2007−172433号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、シミュレーションプログラムでは、3次元CADデータとして入力される座標データと拘束データだけでは、構成部品同士の動作に関する情報が欠落しているため、構成部品が組み合わされた装置のいずれかの部品が固定部品なのか、または可動部品なのか判別が付かないため、直ちにシミュレーションプログラムによるシミュレーションができない。従って、現状では、シミュレーションするために必要な設定データを、操作者は手作業により入力している状態である。この手作業は、シミュレーションする構成部品の数が多ければ多いほど数多くなり、時間を要するだけでなく、設定ミスも多くなるおそれがある。
【0007】
そこで本発明は、シミュレーションプログラムによるシミュレーション環境をCADデータから容易に生成することで、作業時間の短縮とシミュレーションの精度向上を図ることができるシミュレーションデータ生成装置およびシミュレーションデータ生成プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のシミュレーションデータ生成装置は、固定部品と可動部品とから構成されたシミュレーションの対象装置を、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段と、前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主として割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従として割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段とを備えたことを特徴とする。
【0009】
本発明のシミュレーションデータ生成装置によれば、まず、解析制御手段が3次元CADデータにて表現された動作装置を動作させることにより始点座標データと終点座標データとを得る。次に、設定データ生成手段がこの始点座標データと終点座標データとから部品の位置が変化したか否かに基づいて固定部品と、この固定部品に対する可動部品とを判定する。そして、設定データ生成手段が固定部品を主とし、可動部品を従とした部品主従データを生成する。この部品主従データをシミュレーションプログラムが固定部品と可動部品とを識別するための設定データとすることで、手作業で設定することなく、シミュレーションプログラムによりシミュレーションを行うことができる。
【0010】
前記設定データ生成手段は、始点座標データおよび終点座標データから、移動方向と移動量とを示すベクトルデータを生成するのが望ましい。シミュレーションプログラムが設定データとして、ベクトルデータを必要とするときでも、設定データ生成手段が始点座標データおよび終点座標データからベクトルデータを生成することにより手作業で設定することなく、シミュレーションプログラムによりシミュレーションを行うことができる。
【0011】
前記解析制御手段は、対象装置が複数の動作装置を含む場合、前記複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させて、第1のマトリクス表として作成し、前記設定データ生成手段は、前記第1のマトリクス表から、動作装置に対応して位置が移動した部品(可動部品)数が多い順に列データを並び替えた第2のマトリクス表を作成し、前記第2のマトリクス表に基づいて、位置が移動した部品数の多い列データから順に、可動部品を位置が移動しなかった部品(固定部品)に関連付けて部品主従データを生成するのが望ましい。
対象装置が複数の動作装置を含む場合でも、解析制御手段が第1のマトリクス表を作成し、設定データ生成手段が第1のマトリクス表から第2のマトリクス表を作成した後、可動部品を固定部品に順次関連付けすることで、部品主従データを生成することができる。
【0012】
本発明のシミュレーションデータ生成装置は、コンピュータを、固定部品と可動部品とから構成され、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置を対象装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段、前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主と割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従と割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段として機能させるためのシミュレーションデータ生成プログラムにより実現することができる。
【発明の効果】
【0013】
本発明では、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを自動的に生成することができるので、3次元CADデータにシミュレーションをするための固定部品や可動部品を識別する設定データが含まれていなくても、シミュレーションプログラムによるシミュレーション環境を3次元CADデータから容易に生成することで、作業時間の短縮とシミュレーションの精度向上を図ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るシミュレーションシステムの構成を説明するための図である。
【図2】図1に示すシミュレーションシステムの第1のコンピュータの構成を説明するための図である。
【図3】シミュレーションの対象装置の一例としての直線移動するエアシリンダを示す斜視図である。
【図4】図3に示すエアシリンダを示す図であり、(A)は始点状態を示す斜視図、(B)は終点状態を示す斜視図である。
【図5】シミュレーションの対象装置の一例としての回転移動するロータリーアクチュエータを使用した回転装置を示す斜視図である。
【図6】図3に示す回転装置を示す図であり、(A)は終点状態を示す斜視図、(B)は回転軸を示す部分拡大斜視図である。
【図7】シミュレーションの対象装置の一例としての直線移動および回転移動をする複合装置を示す斜視図である。
【図8】図7に示す複合装置の始点状態を示す斜視図である。
【図9】複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させた第1のマトリクス表を示す図である。
【図10】図9に示す第1のマトリクス表から動作装置に対応して位置が移動した部品数が多い順に列データを並び替えた第2のマトリクス表を示す図である。
【図11】図10に示す第2のマトリクス表から可動部品をこの可動部品に対する固定部品に関連付けた部品主従データとすることを説明するための表である。
【発明を実施するための形態】
【0015】
本発明の実施の形態に係るシミュレーションシステムを図面に基づいて説明する。
図1に示すように、シミュレーションシステムは、3次元CADプログラムが動作することで3次元CAD装置として機能すると共に、シミュレーションデータ生成プログラムが動作することで、シミュレーションデータ生成装置として機能する第1のコンピュータC1と、仮想的に製造装置をシミュレーションするときの動作を指定する動作プログラムを実行して、シミュレーションプログラムにコマンドを出力する第2のコンピュータC2と、シミュレーションプログラムが動作するシミュレーション装置として機能する第3のコンピュータC3とを備えている。
【0016】
図1では、3次元CAD装置として機能するコンピュータと、シミュレーションデータ生成装置として機能するコンピュータとを同じコンピュータとしているが、異なるコンピュータとしてもよい。また、第1のコンピュータC1と第3のコンピュータC3とを同じコンピュータとしてもよい。
【0017】
第1のコンピュータC1から第3のコンピュータC3へは、3次元として表現された3次元CADデータと、シミュレーションデータ生成プログラムにより生成された設定データが渡される。この3次元CADデータは、3次元CADプログラムを操作して装置を3次元的に表現されたデータで、各構成部品の輪郭を示す座標データと、接する構成部品同士のある2つの面同士が移動可能か否かの自由度を示す拘束データ等が含まれる。これらのデータは、同じコンピュータであれば、ハードディスク装置を介して渡すことが可能であるが、異なるコンピュータであれば、USBメモリや光ディスク、フレキシブルディスクを介在させたり、LAN経由でサーバを介してファイルを参照させたりしてもよい。
また、第2のコンピュータC2から第3のコンピュータC3へ発行されるコマンドは、LAN経由とすることができる。
【0018】
例えば、3次元CADプログラムは、オートデスク社製のオートデスクインベンターが使用できる。また、シミュレーションプログラムは、ダイレクトX(登録商標)環境で動作するものが使用できる。
【0019】
ここで、第1のコンピュータC1を3次元CAD装置およびシミュレーションデータ生成装置として機能させたときの構成について、図2に基づいて説明する。
図2に示す第1のコンピュータC1は、3次元CAD装置を構成するCAD手段11おおよびコマンド制御手段12と、シミュレーションデータ生成装置を構成する解析制御手段21および設定データ生成手段22と、表示手段31と、入力手段32と、記憶手段33とを備えている。
【0020】
CAD手段11は、3次元イメージとして装置を作図したり、装置を構成する部品を移動させたりする機能を備えている。コマンド制御手段12は、部品の移動を指示する制御コマンドを受信して解析し、CAD手段11に指示を出力する機能を備えている。
解析制御手段21は、構成部品を仮想的に動作させて構成部品の位置関係を解析する機能を備えている。設定データ生成手段22は、解析制御手段21からの解析結果に基づいて生成データを作成する機能を備えている。
【0021】
表示手段31は、操作画面を表示するもので、CRTやLCD、有機ELディスプレイなどが使用できる。入力手段32は、シミュレーションデータ生成プログラムを起動終了したり、操作したりするときに使用されるもので、キーボードやマウス、タブレット、ジョイスティックなどが使用できる。
記憶手段33は、3次元CADデータ、設定データなどの他に、各種のプログラムを格納するための不揮発性メモリである。記憶手段33は、コンピュータに設けられたハードディスクドライブとすることができる。
【0022】
以上のように構成された本発明の実施の形態に係るシミュレーションデータ生成装置として機能するシミュレーションデータ生成プログラムの動作を図面に基づいて説明する。
シミュレーションを行う対象装置の動作として、大別すると直線移動と回転移動の2つである。複雑な装置であっても、この直線移動と回転移動との組み合わせにより動作を実現することができる。従って、この直線移動と回転移動を行う対象装置を例に、シミュレーションデータ生成プログラムの動作を説明する。
【0023】
まず、シミュレーションの対象装置として、直線移動を行う動作装置である図3に示すエアシリンダ50を単純モデル化したものに基づいて説明する。例えば、図3に示すエアシリンダ50では、2個の構成部品のうち一方の構成部品であるシリンダ本体501と、他方の構成部品である伸縮部502とから構成されている。
シリンダ本体501は、直方体状のケーシングにシリンダが内蔵され、上面に伸縮部502が設けられている。伸縮部502は、2本のロッド502aの先端にテーブル502bが設けられている。
【0024】
3次元CADデータでは、このエアシリンダ50のシリンダ本体501と伸縮部502とのそれぞれの輪郭を示す座標データと、シリンダ本体501と伸縮部502との向き合う面(上面501aとテーブル502b)の自由度を示す拘束データとが定義されている。図3においては、シリンダ本体501の上面501aとテーブル502bの底面とは、上下方向のみが許容され、スライド方向は規制されている旨の拘束データが定義されている。なお、初期状態では、シリンダ本体501の上面501aと伸縮部502のテーブル502aとは隙間無しに設定されている。
【0025】
解析制御手段21は、シリンダ本体501と伸縮部502との間の隙間が所定距離となるように、CAD手段11にコマンドを発行する。図4(A)および同図(B)に示すようにCAD手段11では、シリンダ本体501と伸縮部502とを拘束データに準じて移動させる。この場合にはシリンダ本体501と伸縮部502とを離間させる。そして、CAD手段11は、シリンダ本体501と伸縮部502との位置を示す座標データを、シミュレーションデータ生成装置へ出力する。
【0026】
例えば、シリンダ本体501の移動前の任意の座標データ(始点座標データ)が(x11,y11,z11)であり、伸縮部502の移動前の任意の座標データが(x21,y21,z21)であったとする。そして、移動後では、シリンダ本体501の座標データ(終点座標データ)が(x11,y11,z11)、伸縮部502が(x22,y22,z22)であったとする。
【0027】
解析制御手段21は、移動後の座標データが、変化しなかった場合は固定部品、変化した場合は、この固定部品に対する可動部品であると判定している。従って、解析制御手段21は、シリンダ本体501と伸縮部502とを離間させることにより移動した座標データから、移動したのが伸縮部502、移動しなかったのがシリンダ本体501であると判定することができる。
設定データ生成手段22は、この判定結果に基づいて、固定部品を親または主(上位を示すデータ)、可動部品を子または従(下位を示すデータ)とする親子関係(主従関係)を示す部品主従データを設定データとして生成する。
【0028】
従って、設定データ生成手段22はシリンダ本体501に上位(主)であることを示す「−1」を割り当てる。また、伸縮部502はシリンダ本体501に対して下位(従)であることを示す「0」を割り当てる。
【0029】
また、設定データ生成手段22は、伸縮部502の最初の位置を始点とし、移動後の位置を終点として、移動方向と移動量とからベクトルデータを生成して設定データに含める。このベクトルデータは、シミュレーションプログラムが、シミュレーション環境として必要としているために、生成されるもので、可動部品の始点座標データと終点座標データとでシミュレーションが行えるものであれば、ベクトルデータは生成しなくてもよい。
【0030】
このようにして、シミュレーションの際に3次元CADデータだけでは、シリンダ本体501または伸縮部502の輪郭を座標データにより定義するしかなく、いずれの構成部品が移動するかが分からないため、エアシリンダ50のシミュレーションに際しては手作業により割り当てをしていたが、エアシリンダ50の3次元CADデータに部品主従データを割り当て付加することにより、シミュレーションの対象装置を構成するそれぞれの構成部品について部品主従データにより固定部品かまたは移動部品かが判別できるので、手作業による設定データの入力が省略できる。従って、大幅な作業時間の短縮を図ることができる。
【0031】
次に、シミュレーションの対象装置として、回転移動を行う動作装置である図5に示すロータリーアクチュエータによる回転装置を単純モデル化したものを例に説明する。なお、図5においてはロータリーアクチュエータについては図示していない。
図5に示す回転装置51は、2個の構成部品のうち一方の構成部品である第1の板状部品511と、ロータリーアクチュエータにより回転する他方の構成部品である第2の板状部品512とから構成されている。
回転装置51は、回転軸Oに設けられたロータリーアクチュエータを中心に第2の板状部品512が第1の板状部品511に対して円弧を描きながら回転するように接続されている。
【0032】
3次元CADデータでは、この回転装置51の第1の板状部品511と第2の板状部品512とのそれぞれの輪郭を示す座標データと、第1の板状部品511と第2の板状部品512との向き合う面の自由度を示す拘束データとが定義されている。図5においては、第1の板状部品511と第2の板状部品512とを接続する回転軸Oが第2の板状部品512に対して自由度があることが定義されることで、上下方向が拘束され、回転方向は規制されている旨の拘束データが定義されている。なお、初期状態では、第1の板状部品511と第2の板状部品512とは重なり合う状態に設定されている。
【0033】
解析制御手段21は、図6(A)および同図(B)に示すように、第1の板状部品511と第2の板状部品512との間の隙間が所定距離となるように、CAD手段11にコマンドを発行する。CAD手段11では、第1の板状部品511と第2の板状部品512とを拘束データに準じて離間させる。そして、CAD手段11は、第1の板状部品511と第2の板状部品512との位置を示す座標データを、シミュレーションデータ生成装置へ出力する。
【0034】
解析制御手段21は、第1の板状部品511と第2の板状部品512とを離間させることにより移動した座標データから、移動したのが第2の板状部品512、移動しなかったのが第1の板状部品511であると判定することができる。
設定データ生成手段22は、この判定結果に基づいて、固定部品である第1の板状部品511に上位であることを示す「−1」を割り当てる。また、第1の板状部品511に対する可動部品となる第2の板状部品512は第1の板状部品に対して下位あることを示す「0」を割り当てた部品主従データを生成する。
【0035】
また、設定データ生成手段22は、伸縮部502の最初の位置を始点とし、移動後の位置を終点として、移動方向と移動量から軸ベクトルデータを生成する。また、設定データ生成手段22は、回転軸Oの座標を、移動前(始点座標データ)と移動後(終点座標データ)とから所定の行列計算を行って算出し、回転軸データとして生成する。
この軸ベクトルデータや回転軸データは、シミュレーションプログラムが、シミュレーション環境として必要としているために、生成されるもので、可動部品の始点座標データと終点座標データとでシミュレーションが行えるものであれば生成しなくてもよい。
このように回転移動を行う回転装置51であっても、3次元CADデータに部品主従データを割り当て付加することにより手作業による設定データの入力が省略できる。
【0036】
次に、直線移動と回転運動との両方の動作装置を備えた複雑な動作をする複合装置を例に、図7から図11に基づいて説明する。
図7に示す複合装置60は、ベース盤601と、第1のエアシリンダ61と、第1のエアシリンダ61上に配置された第1の回転装置62と、第1の回転装置62に接続された第2のエアシリンダ63と、第1のエアシリンダ61上に配置された第2の回転装置64とを備えた複数の装置から構成されている。
【0037】
ベース盤601は板状に形成され、床面に拘束されたものである。
第1のエアシリンダ61は、図3に示すエアシリンダ50と同様に、シリンダ本体611と伸縮部612とから構成されている。
第1の回転装置62は、第1のエアシリンダ61の伸縮部612上の一方の端部に配置され、図5に示す回転装置51と同様に、第1の板状部品621と第2の板状部品622とから構成されている。第1の板状部品621と第2の板状部品622とは回転軸623を中心に回転する。
【0038】
第2のエアシリンダ63は、第1のエアシリンダ61と同様に、シリンダ本体631と伸縮部632とから構成されている。第2のエアシリンダ63は、シリンダ本体631が第1の回転装置62の第2の板状部品622に拘束されている。伸縮部632には、第1のワークW1を載置するためのテーブル部633が設けられている。
第2の回転装置64は、第1のエアシリンダ61の伸縮部612上の他方の端部に配置され、図5に示す回転装置51と同様に、第1の板状部品641と第2の板状部品642とから構成されている。第1の板状部品641と第2の板状部品642とは回転軸643を中心に回転する。第2の板状部品642上には、第2のワークW2が載置されている。
また、複合装置60とは別に、第3のワークW3が配置されている。
【0039】
このように構成される複合装置60について、解析制御手段21は、第1のエアシリンダ61、第2のエアシリンダ63、第1の回転装置62および第2の回転装置64を順に、図8に示す始点復帰状態から終点まで各装置をCAD手段11にコマンドを発行して移動させる。そして、各部品について、移動した部品に「1」を、移動しなかった部品に「0」を付与した列データを、各装置(動作装置)ごとに並べたマトリクス表(第1のマトリクス表)として作成し、それぞれの部品を識別する。このマトリクス表を図9に示す。図9に示すマトリクス表では、各部品を複合装置60が配置される設置面から順に並べられている。
【0040】
図9では、例えば、第1のエアシリンダ61を動作させても、ベース盤601と、第1のエアシリンダ61のシリンダ本体611は移動せず、他の部品は移動したことを示している。そして、第1のワークW1と第2のワークW2とは移動したが、第3のワークW3は移動しなかったことを示している。従って、図9に示すマトリクス表の縦列は、複合装置60を構成する一台の装置を動作させたときに一緒に移動する部品を示している。
【0041】
次に、このマトリクス表に基づいて、設定データ生成手段22は部品主従データを生成する。
まず、設定データ生成手段22は、このマトリクス表の縦列に基づいて合計値(移動した部品数)を算出し、合計値が大きい順に縦列を並び替える。つまり、動作させた装置による影響の大きい順に並び替える。図10に並び替えたマトリクス表(第2のマトリクス表)を示す。図10では、第1の回転装置62と第2のエアシリンダ63が、図9に示すマトリクス表から入れ替わっている。
【0042】
次に、設定データ生成手段22は、まず、初期状態として、図11に示すように、全ての部品に、上位(主)であることを示す「−1」を割り当てる。
次に、1回目として、順位が「0」の縦列、つまり、第1のエアシリンダ61を動作させたときに一緒に移動する部品(「1」が代入されている部品番号2〜11までの部品)について、その親(主)となる「−1」が代入されている最も小さい部品番号を代入する。この場合、初期状態では全部が「−1」であるため、ベース盤601を示す部品番号0が最も小さいので、「0」を代入する。
【0043】
次に、2回目として、順位が「1」の縦列、つまり、第1の回転装置62を動作させたときに一緒に移動する部品(「1」が代入されている部品番号4〜8までの部品)について、1回目の終了時点では「0」が代入されているので、「0」が代入されている部品が親(主)となる。従って、親となる「0」が代入されている最も小さい部品番号を代入する。この場合、1回目の状態では、「0」が代入されている部品番号2〜11までの部品のうち第1のエアシリンダ61の伸縮部612を示す部品番号2が最も小さいので、「2」を代入する。
【0044】
次に、3回目として、順位が「2」の縦列、つまり、第2のエアシリンダ63を動作させたときに一緒に移動する部品(「1」が代入されている部品番号6〜8の部品)について、二回目の終了時点では「2」が代入されているので、「2」が代入されている部品が主となる。従って、主となる「2」が代入されている最も小さい部品番号を代入する。この場合、2回目の状態では、「2」が代入されている部品番号4〜8までの部品のうち第1の回転装置62の第2の板状部品622を示す部品番号4が最も小さいので、「4」を代入する。
【0045】
次に、4回目として、順位が「3」の縦列、つまり、第2の回転装置64を動作させたときに一緒に移動する部品(「1」が代入されている部品番号10,11の部品)について、4回目の終了時点では「0」が代入されているので、「0」が代入されている部品が主となる。従って、主となる「0」が代入されている最も小さい部品番号を代入する。この場合、3回目の状態では、「0」が代入されている部品番号2,3,9〜11のうち部品番号3が最も小さいので、「3」を代入する。
【0046】
このようにして部品番号を代入することで、従となる可動部品を主となる固定部品に関連付けすることで生成された部品主従データによれば、ベース盤601、第1のエアシリンダ61のシリンダ本体611とは並列的な位置関係にあり、これらを固定部品である主としたときに、第1のエアシリンダ61の伸縮部612と第1の回転装置62の第1の板状部品621と第2の回転装置64の第1の板状部品641とが、ベース盤601とシリンダ本体611とに対する可動部品である従となることがわかる。また、第1のエアシリンダ61の伸縮部612を固定部品である主としたときに、第1の回転装置62の第2の板状部品622と第2のエアシリンダ63のシリンダ本体631とが、伸縮部612と第1の板状部品621の可動部品である従となることがわかる。
このようにして、設定データ生成手段22が部品主従データを生成する。
シミュレーションプログラムが動作する第1のコンピュータC1では、手作業によるデータの設定なしに、3次元CADデータと共に、設定データ生成手段22が生成した設定データと、動作を制御するための制御プログラムとに基づいてシミュレーションを行うことができる。
【0047】
このようにして、複数の装置が組み合わさった複合装置60でも、部品主従データを生成することができるので、例えば、大規模で複雑な装置をシミュレーションする際に、手作業により設定が省略できるので、時間短縮を図ることができると共に、シミュレーションの精度向上を図ることができる。
【産業上の利用可能性】
【0048】
本発明は、3次元CADデータに基づいて、大規模で複雑な製造装置や検査装置、搬送装置など様々な装置をシミュレーションする際に好適である。
【符号の説明】
【0049】
C1 第1のコンピュータ
11 CAD手段
12 コマンド制御手段
21 解析制御手段
22 設定データ生成手段
31 表示手段
32 入力手段
33 記憶手段
C2 第2のコンピュータ
C3 第3のコンピュータ
50 エアシリンダ
501 シリンダ本体
501a 上面
502 伸縮部
502a ロッド
502b テーブル
51 回転装置
511 第1の板状部品
512 第2の板状部品
O 回転軸
60 複合装置
601 ベース盤
61 第1のエアシリンダ
611 シリンダ本体
612 伸縮部
62 第1の回転装置
621 第1の板状部品
622 第2の板状部品
623 回転軸
63 第2のエアシリンダ
631 シリンダ本体
632 伸縮部
633 テーブル部
64 第2の回転装置
641 第1の板状部品
642 第2の板状部品
643 回転軸
W1 第1のワーク
W2 第2のワーク
W3 第3のワーク
【特許請求の範囲】
【請求項1】
固定部品と可動部品とから構成されたシミュレーションの対象装置を、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段と、
前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主として割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従として割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段とを備えたことを特徴とするシミュレーションデータ生成装置。
【請求項2】
前記設定データ生成手段は、始点座標データおよび終点座標データから、移動方向と移動量とを示すベクトルデータを生成する請求項1記載のシミュレーションデータ生成装置。
【請求項3】
前記解析制御手段は、対象装置が複数の動作装置を含む場合、前記複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させて、第1のマトリクス表として作成し、
前記設定データ生成手段は、前記第1のマトリクス表から、動作装置に対応して位置が移動した部品(可動部品)数が多い順に列データを並び替えた第2のマトリクス表を作成し、前記第2のマトリクス表に基づいて、位置が移動した部品数の多い列データから順に、可動部品を位置が移動しなかった部品(固定部品)に関連付けて部品主従データを生成する請求項1または2記載のシミュレーションデータ生成装置。
【請求項4】
コンピュータを、
固定部品と可動部品とから構成され、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置を対象装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段、
前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主と割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従と割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段として機能させることを特徴とするシミュレーションデータ生成プログラム。
【請求項1】
固定部品と可動部品とから構成されたシミュレーションの対象装置を、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段と、
前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主として割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従として割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段とを備えたことを特徴とするシミュレーションデータ生成装置。
【請求項2】
前記設定データ生成手段は、始点座標データおよび終点座標データから、移動方向と移動量とを示すベクトルデータを生成する請求項1記載のシミュレーションデータ生成装置。
【請求項3】
前記解析制御手段は、対象装置が複数の動作装置を含む場合、前記複数の動作装置を順次動作させ、一緒に移動する部品を示す列データを動作装置ごとに対応させて、第1のマトリクス表として作成し、
前記設定データ生成手段は、前記第1のマトリクス表から、動作装置に対応して位置が移動した部品(可動部品)数が多い順に列データを並び替えた第2のマトリクス表を作成し、前記第2のマトリクス表に基づいて、位置が移動した部品数の多い列データから順に、可動部品を位置が移動しなかった部品(固定部品)に関連付けて部品主従データを生成する請求項1または2記載のシミュレーションデータ生成装置。
【請求項4】
コンピュータを、
固定部品と可動部品とから構成され、3次元CADプログラムにより作図されることで3次元CADデータにて表現された動作装置を対象装置として動作させ、前記動作装置を構成する各部品の移動前の座標データである始点座標データと、移動後の座標データである終点座標データとを得る解析制御手段、
前記解析制御手段からの始点座標データおよび終点座標データから、位置が変化しない部品を固定部品であることを示す主と割り当て、位置が変化した部品を当該固定部品に対する可動部品であることを示す従と割り当てることで、シミュレーションプログラムが固定部品と可動部品とを識別するための部品主従データを設定データとして生成する設定データ生成手段として機能させることを特徴とするシミュレーションデータ生成プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−226603(P2012−226603A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94345(P2011−94345)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(511100693)株式会社三松 (1)
【出願人】(511099869)有限会社西尾システム (1)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(511100693)株式会社三松 (1)
【出願人】(511099869)有限会社西尾システム (1)
【Fターム(参考)】
[ Back to top ]