
シミュレーション装置と方法
【課題】駐車装置のエレベータの振動加速度を抑制できるエレベータの索体制御パターンを探し出せるようにする。
【解決手段】駐車装置に設けられ、索体に吊り下げられるエレベータの振動加速度を評価するシミュレーション装置である。索体制御パターンを入力する入力部17と、入力された索体制御パターンに基づいて振動加速度を演算する演算部19と、を備える。索体制御パターンは、エレベータに向けて鉛直下方に索体を繰り出す繰出速度と時間との関係、または、エレベータ側から鉛直上方へ索体を引き上げる引上速度と時間との関係である。演算部19は、エレベータの運動を表す運動系モデルを保持し、該運動系モデルに索体制御パターンを適用することで振動加速度を演算する。運動系モデルには、索体のバネ特性が反映されている。
【解決手段】駐車装置に設けられ、索体に吊り下げられるエレベータの振動加速度を評価するシミュレーション装置である。索体制御パターンを入力する入力部17と、入力された索体制御パターンに基づいて振動加速度を演算する演算部19と、を備える。索体制御パターンは、エレベータに向けて鉛直下方に索体を繰り出す繰出速度と時間との関係、または、エレベータ側から鉛直上方へ索体を引き上げる引上速度と時間との関係である。演算部19は、エレベータの運動を表す運動系モデルを保持し、該運動系モデルに索体制御パターンを適用することで振動加速度を演算する。運動系モデルには、索体のバネ特性が反映されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車装置に設けられるエレベータの縦振動(加速度)を評価するシミュレーション装置と方法に関する。
【背景技術】
【0002】
エレベータを利用したエレベータ式駐車装置では、例えば、車両が駐車可能な駐車階を複数設け、入出庫階と各駐車階との間で、車両をエレベータで昇降させる。エレベータは、ワイヤーロープなどの索体で吊り下げられて昇降駆動される。
【0003】
エレベータ式駐車装置において、駐車階の数、エレベータの昇降速度、エレベータの昇降加速度などがそれほど大きくない場合には、エレベータを吊り下げる索体の縦振動、即ち、鉛直方向におけるエレベータの振動する加速度(以下、振動加速度という)が、顕著に現れなかった。従って、エレベータの昇降制御において、索体の縦振動が問題とはならなかった。
【0004】
本願の先行技術文献として、例えば下記の特許文献1、2がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−168485号公報
【特許文献2】特開平7−166732号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、近年のエレベータ式駐車装置が高層化し、これに伴い、索体が長くなってきた。この場合、索体のバネ特性により、エレベータの昇降停止時などに索体の縦振動(伸縮)が顕著に現れるようになってきた。この縦振動により、エレベータの停止状態をセンサが速やかに検出できなくなるため、縦振動が収まるまで次の動作に移れなくなる。その結果、入出車時間が長くなり、エレベータ式駐車装置の性能を悪化させることになる。
【0007】
そこで、本発明の目的は、前記エレベータの振動加速度を抑制できるエレベータの索体制御パターンを探し出せるようにすることにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明によると、駐車装置に設けられるエレベータの振動加速度を評価するシミュレーション装置であって、
前記エレベータは、索体に吊り下げられ該索体を介して昇降駆動され、
索体制御パターンを入力する入力部と、入力された前記索体制御パターンに基づいて前記振動加速度を演算する演算部と、を備え、
前記索体制御パターンは、前記エレベータに向けて鉛直下方に前記索体を繰り出す繰出速度と時間との関係、または、前記エレベータ側から鉛直上方へ前記索体を引き上げる引上速度と時間との関係であり、
前記演算部は、前記エレベータの運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算し、
前記運動系モデルには、前記索体のバネ特性が反映されている、ことを特徴とするシミュレーション装置が提供される。
【0009】
本発明の好ましい実施形態によると、前記運動系モデルには、前記エレベータに積載された車両のサスペンションのバネ特性が反映されている。
【0010】
また、本発明の好ましい実施形態によると、前記運動系モデルには、前記索体の前記バネ特性による縦振動の減衰特性が反映されている。
【0011】
さらに、本発明の好ましい実施形態によると、前記運動系モデルには、前記サスペンションの前記バネ特性による縦振動の減衰特性が反映されている。
【0012】
前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性は、前記エレベータに向けて鉛直下方に繰り出された前記索体の繰り出し長さの関数であり、
繰り出し長さと、前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性との関係を予め求めておき、
前記演算部は、当該関係に基づいて、前記振動加速度を算出してよい。
【0013】
好ましくは、前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了するようになっており、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了すようになっている。
【0014】
また、上記目的を達成するため、本発明によると、上述のシミュレーション装置を用いたシミュレーション方法であって、
前記入力部により、前記索体制御パターンを入力する入力ステップと、
前記演算部により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度を演算する振動演算ステップと、を有する、ことを特徴とするシミュレーション方法が提供される。
【0015】
本発明の好ましい実施形態によると、前記入力ステップで入力する前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了し、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する。
【発明の効果】
【0016】
上述した本発明によると、前記索体制御パターンを、前記エレベータの運動を表す運動系モデルに適用することで前記振動加速度を演算し、前記運動系モデルには、前記索体のバネ特性が反映されているので、前記索体の伸縮による振動加速度が許容値以下であるかを判断できる。演算した振動加速度が許容値を超える場合には、異なる索体制御パターンで振動加速度を再び演算して、振動加速度が許容値以下となる索体制御パターンを探し出すことができる。
また、本発明者は、エレベータに積載される車両のサスペンションが、エレベータの振動加速度に影響を与えることに着目して、前記運動系モデルに、前記エレベータに積載された車両のサスペンションのバネ特性を反映させた。これにより、高い精度で、エレベータの振動加速度を演算できる。なお、本発明の実施形態による他の効果は、後述する。
【図面の簡単な説明】
【0017】
【図1】本発明によるシミュレーション装置と方法の対象となるエレベータ式駐車装置のエレベータの昇降機構を示す。
【図2】図1のバネ特性を表わす昇降機構の簡略図である。
【図3】本発明の実施形態によるシミュレーション装置の処理の流れを示すブロック図である。
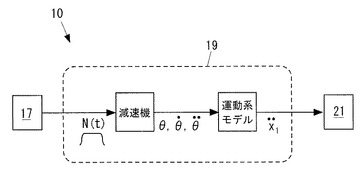
【図4】本発明の実施形態によるシミュレーション装置の処理の流れを示す別のブロック図である。
【図5】シミュレーション装置を示すブロック図である。
【図6】本実施形態によるシミュレーション結果を示すグラフである。
【図7】本発明の実施形態によるシミュレーション方法のフローチャートである。
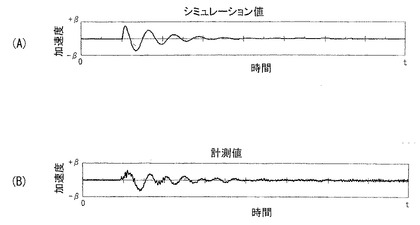
【図8】本発明の実施形態によるシミュレーション結果と、実際の計測結果との比較を示すグラフである。
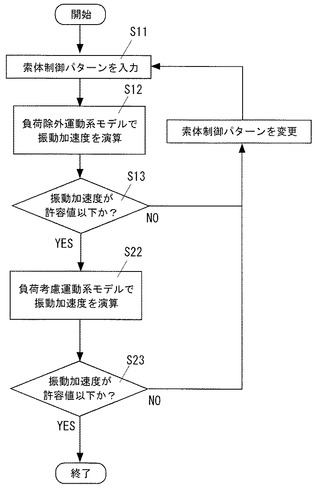
【図9】本発明の別の実施形態によるシミュレーション方法のフローチャートである。
【発明を実施するための形態】
【0018】
本発明を実施するための最良の実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0019】
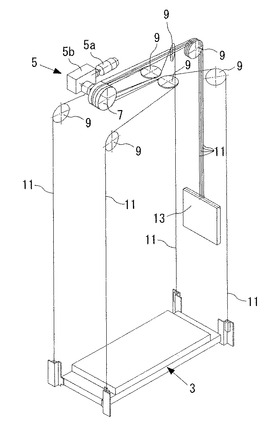
図1は、本発明のシミュレーション装置10が適用可能な駐車装置のエレベータ3(ケージ)を昇降させる昇降機構を示す概略図である。昇降機構は、駆動装置5、駆動シーブ7、従動滑車9、索体11(図1の例では、ワイヤーロープ)、およびカウンターウエイト13を備える。駆動装置5は、駆動モータ5aと、該駆動モータ5aの回転を減速させる減速機5bとを備える。駆動モータ5aは、減速機5bを介して駆動シーブ7を回転させる。駆動シーブ7には、索体11の中間部が掛け渡されており、索体11の一端は、エレベータ3に固定されており、索体11の他端は、カウンターウエイト13に固定されている。従って、駆動シーブ7が回転すると、駆動シーブ7に掛けられた索体11が、その回転方向により、エレベータ3に向けて繰り出され、または、エレベータ3側から引き上げられてカウンターウエイト13に向けて繰り出され、これにより、エレベータ3が昇降する。図1の例では、このような索体11が、4本設けられており、これら4本の索体11は、それぞれ、エレベータ3の4隅から延びて、従動滑車9、従動滑車9、駆動シーブ7、従動滑車9にこの順で掛けられ、カウンターウエイト13まで延びている。
【0020】
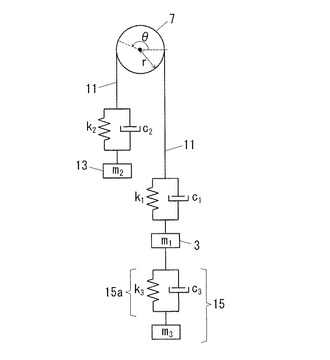
図2は、図1のバネ特性を表わす昇降機構を簡略化した図である。即ち、図2では、図1の4本の索体11を1本の索体11として表現し、従動滑車9を省略している。図1、図2のように、エレベータ3は、索体11に吊り下げられ、駆動装置5により該索体11を介して昇降駆動される。
【0021】
図1、図2において、昇降する運動系は、エレベータ3、索体11、および、これらと共に運動する他の運動要素を有する。当該他の運動要素として、カウンターウエイト13、エレベータ3に積載される車両15(図1では省略)、および当該車両15が有するサスペンション15aがある。なお、図2では、サスペンション15aにより車両15がエレベータ3に吊り下げられているとする。これにより、後述の計算が簡単になり、かつ、エレベータ3に車両15が積載されている場合と同じ計算結果を得ることができる。
【0022】
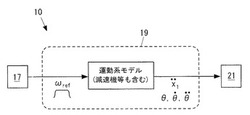
図3、図4は、本発明の実施形態によるシミュレーション装置10による処理の流れを示すブロック図である。シミュレーション装置10は、駐車装置に設けられるエレベータ3の振動加速度を評価し、入力部17、演算部19、および評価部21を備える。
入力部17は、人に操作されることで、索体制御パターンを入力する装置であり、例えば、コンピュータのキーボードやマウスである。索体制御パターンは、入力部17から演算部19へ入力される。索体制御パターンは、索体11の移動速度と時間との関係である。即ち、索体制御パターンは、エレベータ3に向けて鉛直下方に索体11を繰り出す繰出速度と時間との関係、または、エレベータ3側から鉛直上方へ索体11を引き上げる引上速度と時間との関係である。
演算部19は、入力された前記索体制御パターンに基づいて前記振動加速度を演算し、該振動加速度を出力する。即ち、演算部19は、エレベータ3の運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算する。前記運動系モデルには、索体11のバネ特性が反映されている。
評価部21は、演算部19により演算された前記振動加速度の振幅(例えば、最大振幅)が、所定の許容値以下であるかを判断し、この判断の結果を示す信号を出力し、例えば、当該結果をディスプレイ装置に表示する。なお、評価部21の代わりに、演算部19から出力された前記振動加速度を示す波形を表示するディスプレイ装置が設けられてもよい。この波形は、横軸を時間とし、縦軸を当該振動加速度としてディスプレイ装置に表示される。この表示された波形に基づいて、前記振動加速度の振幅が許容値以下であるかを人が判断してもよい。
【0023】
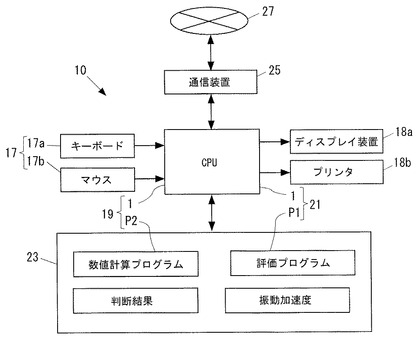
図5は、図3、図4の処理を実行するシミュレーション装置10の構成を示すブロック図である。シミュレーション装置10は、入力部17、演算部19、および評価部21以外に、記憶装置23や通信装置25などを備える。
入力部17は、この例では、上述のキーボード17aおよびマウス17bの少なくとも一方により構成される。
演算部19は、コンピュータのCPU(中央処理装置)1、および、記憶装置23に記憶・保持された数値計算プログラムにより構成される。数値計算プログラムP1は、上述の運動系モデルを表したものである。演算部19において、CPU1は、数値計算プログラムP1を実行することで、上述のように、入力された前記索体制御パターンに基づいて前記振動加速度を演算して記憶装置23へ出力する。
評価部21は、CPU1、および、記憶装置23に記憶・保持された評価プログラムP2により構成される。評価部21において、CPU1は、評価プログラムP2を実行することで、上述のように、演算部19により演算された前記振動加速度の振幅が、所定の許容値以下であるかを判断し、この判断の結果を示す信号をディスプレイ装置18a、プリンタ18b、記憶装置23などへ出力し、例えば、当該結果をディスプレイ装置18aに表示させたり、プリンタ18bにより印刷させたりする。
記憶装置23は、数値計算プログラムP1、評価プログラムP2、演算部19から出力された前記振動加速度、評価部21から出力された前記判断の結果(例えば、上述の波形)などを記憶する。記憶装置23は、例えばハードディスクであってよい。
通信装置25は、ネットワーク27(例えば、LAN:local area network)に接続されている。このネットワーク27を介して、通信装置25は、所望の場所に設置されたコンピュータや記憶装置などへ前記振動加速度および前記判断の結果の少なくとも一方を送信することができる。
【0024】
上述の運動系モデルとして、後述の式(1)〜(9)が演算部19に保持される。本実施形態によると、運動系モデル(即ち、後述の式(1)〜(9))には、索体11のバネ特性(即ち、後述のバネ定数k1、k2)と、サスペンション15aのバネ特性(即ち、後述のバネ定数k3)が反映されている。また、本実施形態では、運動系モデル(即ち、後述の式(1)〜(9))には、索体11のバネ特性による縦振動の減衰特性(即ち、後述の減衰係数c1、c2)と、サスペンション15aのバネ特性による縦振動の減衰特性(即ち、後述の減衰係数c3)が反映されている。
【0025】
以下において、上述の運動系モデルとして演算部19に保持される式(1)〜(9)を説明する。
【0026】
エレベータ3を含む運動系の運動方程式は、次の[数1]の式(1)〜(3)で表される。
【0027】
【数1】

【0028】
ここで、上記各式(1)〜(3)の各記号について説明する。
rは、駆動シーブ7の半径を表す。θは、駆動シーブ7の回転角度を表す。x1、x2およびx3は、下向きを正の方向として、それぞれ、エレベータ3の変位(即ち、鉛直方向の変位)、カウンターウエイト13の変位(即ち、鉛直方向の変位)、車両15の変位(即ち、鉛直方向の変位)を表す。m1、m2およびm3は、それぞれ、エレベータ3の質量、カウンターウエイト13の質量、車両15の質量を表す。gは、重力加速度を表す。
c1、c2およびc3は、上述の減衰特性としての減衰係数であり、k1、k2およびk3は、上述のバネ特性としてのバネ定数である。即ち、索体11が、その長さ方向(即ち、鉛直方向)にバネ定数k1、k2で伸縮振動するバネであるとし、かつ、この伸縮振動をしながら、当該伸縮振動の振幅が減衰係数c1、c2で減衰するとする。k1、c1は、それぞれ、エレベータ3と駆動シーブ7との間における索体11のバネ定数、減衰係数であり、k2、c2は、それぞれ、カウンターウエイト13と駆動シーブ7との間における索体11のバネ定数、減衰係数である。また、車両15のサスペンション15aが、鉛直方向にバネ定数k3で伸縮振動するバネであるとし、かつ、この伸縮振動をしながら、当該伸縮振動の振幅が減衰係数c3で減衰するとする。
x1、x2、x3または後述のθの真上に付したドット記号「・」は、x1、x2、x3またはθの時間による1回微分(即ち、dx1/dt、dx2/dt、dx3/dt、dθ/dt)を示し、x1、x2、x3または後述のθの真上に付した2つのドット記号「・・」は、x1、x2、x3またはθの時間による2回微分(即ち、d2x1/dt2、d2x2/dt2、d2x3/dt2、d2θ/dt2)を示す。
x10は、初期状態での索体11の静的伸縮によるエレベータ3の変位(即ち、x1の原点から索体11の静的伸縮量だけ変位した位置)を表し、x20は、初期状態での索体11の静的伸縮によるカウンターウエイト13の変位(即ち、x2の原点から索体11の静的伸縮量だけ変位した位置)を表し、x30は、初期状態での索体11とサスペンション15aの静的伸縮による車両15の変位(即ち、x3の原点からサスペンション15aの静的伸縮量だけ変位した位置)を表す。x10、x20およびx30は、次の[数2]の式(4)〜(6)を満足する。
上述した各記号の定義は、以下においても同じである。
【0029】
【数2】
【0030】
さらに、駆動シーブ7の回転運動を表す次の[数3]の式(7)を加える。
【0031】
【数3】
【0032】
ここで、τinは、駆動モータ5aのトルクを表す。(Js+α2Jm)は、駆動シーブ7の回転軸で換算された慣性モーメントを表し、Jsは、駆動シーブ7に集約された機械系の慣性モーメントを表し、Jmは、駆動モータ5aの慣性モーメントを表し、αは、減速機5bによる減速比を表す。T1は、駆動シーブ7からエレベータ3までにおける索体11の張力を表し、T2は、駆動シーブ7からカウンターウエイト13までにおける索体11の張力を表す。T1、T2は、それぞれ、次の[数4]の式(8)、(9)で表される。これら各記号の定義は、以下においても同じである。
【0033】
【数4】
【0034】
演算部19による第1および第2の演算方法を説明する。
【0035】
[第1の演算方法]
演算部19には、図3のように、索体制御パターンが入力部19から入力される。この索体制御パターンは、駆動モータ5aの角速度ωrefである。ωrefは、時間tの関数である。
【0036】
X=[x1 x2 x3]Tと置き、上述の式(1)〜(3)を、次の[数5]の式(10)で表わす。
【0037】
【数5】
【0038】
ここで、M、C、K、U、Fは、それぞれ、次の[数6]の式(11)〜(15)で表わされる。
【0039】
【数6】
【0040】
上式(10)の右辺において、第1項を外乱、第2項を入力であると見ることができる。
駆動モータ5aの角速度指令ωrefに対する駆動シーブ7の周波数応答は、次の[数7]の式(16)、即ち、式(17)で表わされる。
【0041】
【数7】
【0042】
上式(17)において、sはラプラス演算子であり、Taは、時定数である。上式(17)を状態空間表示すると、次の[数8]の式(18)を得る。
【0043】
【数8】
【0044】
上式(10)と上式(18)を組み合わせた次の[数9]の式(19)が、駆動シーブ7の角速度入力に対するエレベータ3とカウンターウエイト13の動的挙動を表わす状態方程式となる。
【0045】
【数9】
【0046】
演算部19は、上式(19)と上式(4)〜(6)を用いて、駆動モータ5aの角速度指令ωrefに対して、x1、x2、x3、dx1/dt、dx2/dt、dx3/dt、およびθ、dθ/dt、さらに、d2x1/dt2、d2x2/dt2、d2x3/dt2、d2θ/dt2を算出する。この計算は、時々刻々と各変数(x1など)を計算していく逐次計算であってよい。このように、演算部19は、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。
【0047】
[第2の演算方法]
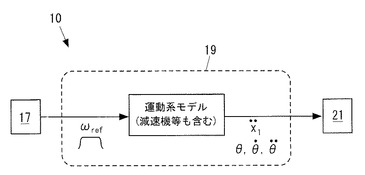
演算部19は、例えば、次のように、入力に基づいて演算してもよい。演算部19には、図4のように、索体制御パターンが入力部17から入力される。この索体制御パターンは、この例では、駆動モータ5aの回転速度N(t)(即ち、単位時間当たりの回転数)である。N(t)は、時間tの関数である。演算部19は、N(t)を減速比αで割ることで、駆動シーブ7の回転速度(即ち、dθ/dt=N(t)/α)を算出する。また、演算部19は、dθ/dtとθの既知の初期値とに基づいて、θを算出する。さらに、演算部19は、θの時間による2回微分(d2θ/dt2)を算出する。次いで、演算部19は、算出したθ、dθ/dt、d2θ/dt2を、運動系モデル(即ち、上式(1)〜(9))に適用することで、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。なお、演算部19は、θ、dθ/dt、d2θ/dt2を上述の式(1)〜(9)に適用することで、τin、T1、T2、x1、dx1/dt、x2、dx2/dt、d2x2/dt2、x3、dx3/dt、d2x3/dt2も算出できる。なお、時間により値が変化する各パラメータの初期値は既知であるとして、演算部19は、上述の演算を行う。この演算は、時々刻々と各変数(x1など)を計算していく逐次計算であってよい。
【0048】
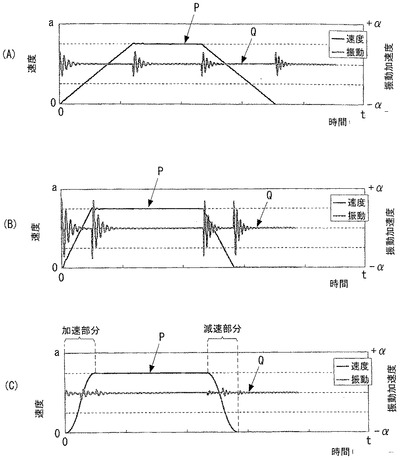
図6は、シミュレーション装置10によるシミュレーション結果を示すグラフである。図6(A)〜(C)は、それぞれ異なる索体制御パターンによるシミュレーション結果を示す。図6(A)〜(C)において、符号Pは、演算部19に入力された索体制御パターンを(r×dθ/dt)として表したグラフ示し、符号Qは、入力された索体制御パターンに基づいて演算部19が上述の式(1)〜(9)により算出した振動加速度d2x1/dt2を表すグラフを示す。なお、図6(A)〜(C)は、エレベータが静止状態から70m上昇して停止した場合を示す。
【0049】
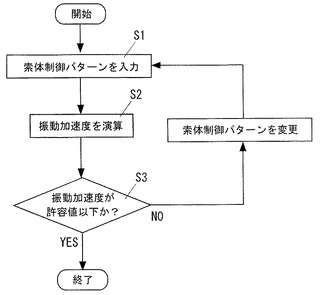
図7は、上述したシミュレーション装置10を用いたシミュレーション方法を示すフローチャートである。シミュレーション方法は、入力ステップS1と振動演算ステップS2を有する。
入力ステップS1では、人が入力部17を操作することで、前記索体制御パターンを入力する。例えば、上述のように索体制御パターンとして、N(t)、r×dθ/dtまたは他の式を入力部17により入力する。
振動演算ステップS2では、演算部19により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度d2x1/dt2を演算する。この演算は、上述と同じ方法で行う。
【0050】
本実施形態によると、好ましくは、前記索体制御パターンは、次のように、S字曲線の波形を有する。入力ステップS1で入力する前記索体制御パターンは、図6(C)の索体制御パターンPのように、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有する。前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了する。前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する。従って、前記索体制御パターンは、図6(C)のように、S字曲線の波形を有する。
【0051】
また、上述のシミュレーション方法は、評価ステップS3を有してよい。評価ステップS3では、振動演算ステップS2で演算した振動加速度が、所定の許容値以下であるかを判断する。この判断は、上述の評価部21で行ってもよいし、上述のディスプレイ装置に表示された当該振動加速度に基づいて人が行ってもよい。当該振動加速度が、所定の許容値を超える場合には、図7のように、索体制御パターンを変えて、再び、入力ステップS1、振動演算ステップS2、評価ステップS3を行ってよい。このような処理を、振動演算ステップS2で演算した振動加速度が、所定の許容値以下になるまで繰り返してよい。このようにして、振動加速度が所定の許容値以下となる索体制御パターンが見つかったら、シミュレーションを終了し、この索体制御パターンで、図1のエレベータ3を実際に昇降駆動させる。
本実施形態では、索体制御パターンを変える場合、好ましくは、上述のS字曲線の波形において、S字の度合いを変えた索体制御パターンで、再び入力ステップS1、振動演算ステップS2、評価ステップS3を行う。
【0052】
なお、索体11のバネ定数k1、k2と減衰係数c1、c2は、既知であれば、その既知の値を使用する。k1、k2とc1、c2が、既知でない場合には、例えば、所定の条件の下で、索体11を実際に伸縮振動させ、その伸縮振動を測定することで、k1、k2、c1、c2を取得してよい。
同様に、サスペンション15aのバネ定数k3と減衰係数c3は、既知であれば、その既知の値を使用する。サスペンション15aのバネ定数k3と減衰係数c3が、既知でない場合には、例えば、所定の条件の下で、サスペンション15aを実際に伸縮振動させ、その伸縮振動を測定することで、k3、c3を取得してよい。なお、駐車装置の使用時に、エレベータ3に積載される種々の車両15のサスペンション15aのバネ定数と減衰係数の平均値を、k3、c3として本実施形態で使用してよい。
車両15の質量m3は、駐車装置の使用時に、エレベータ3に積載される種々の車両15の質量の平均値としてよい。
【0053】
なお、k1、k2、c1、c2は、一定であるとしてもよいが、エレベータ3に向けて鉛直下方に駆動シーブ7から繰り出された索体11の長さ(即ち、駆動シーブ7からエレベータ3までの索体11の長さ。以下、繰り出し長さという)の関数であるとしてもよい。この場合、使用する索体11を伸縮振動させた要素試験を実機とは別に実施し、前記繰り出し長さとk1、k2、c1、c2との関係をテーブル化、または、近似式によって予め求めておく。演算部19は、当該関係に基づいて、上述の第1または第2の演算方法の上記逐次計算において、時々刻々と変えたk1、k2、c1、c2を用いて、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。
【0054】
上述した本発明の実施形態によるシミュレーション装置10と方法では、以下の効果(ア)〜(ウ)が得られる。
【0055】
(ア)前記索体制御パターンを、エレベータ3の運動を表す運動系モデルに適用することで前記振動加速度を演算し、前記運動系モデルには、索体11のバネ特性が反映されているので、索体11の伸縮による振動加速度が許容値以下であるかを判断できる。演算した振動加速度が許容値を超える場合には、(好ましくは、上述のS字曲線の度合いを変化させた)異なる索体制御パターンで振動加速度を再び演算して、振動加速度が許容値以下となる索体制御パターンを探し出すことができる。
【0056】
(イ)エレベータ3に積載される車両15のサスペンション15aが、エレベータ3の振動加速度に影響を与えることに着目して、前記運動系モデルには、エレベータ3に積載された車両15のサスペンション15aのバネ特性を反映させたので、高い精度で、エレベータ3の振動加速度を演算できる。
図8(A)は、上述のようなS字曲線の波形を有する索体制御パターンを入力部17から入力して、演算部19により算出したエレベータ3の振動加速度を表す波形を示す。図8(B)は、図8(A)の結果を得るのに使用した同じ索体制御パターンで、図1のエレベータ3を実際に昇降駆動した場合に計測したエレベータ3の振動加速度を表す波形を示す。図8(A)と図8(B)から、本実施形態により算出した振動加速度は、実際の波形と精度よく一致することが分かる。
なお、本実施形態により算出した振動加速度が、実際の波形からずれた場合には、パラメータ(k1〜k3、c1〜c3など)の評価を行い、これらパラメータの値を適宜修正して次のシミュレーションを行い、再度、シミュレーションによる振動加速度の波形と、実際の波形とを比較し、両者がずれていれば、再度、パラメータの値を修正するといった具合に、このようなシミュレーション、比較、パラメータ値の修正を繰り返し行ってよい。これにより、シミュレーションの精度を向上させることができる。
【0057】
(ウ)前記索体制御パターンが、上述のようなS字曲線の波形を有することでエレベータ3の加速度振動を小さい値に抑えることが可能となる。即ち、図6(A),(B)、(C)のうち、S字曲線の波形を有する索体制御パターンを入力した図6(C)の場合には、S字曲線の波形を有しない索体制御パターンを入力した図6(A)または(B)の場合と比較して、加速度振動が大幅に抑制されていることが分かる。
【0058】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。
【0059】
上述の実施形態では、車両15とそのサスペンション15aを反映させた運動系モデルを用いて、所定の許容値以下となる索体制御パターンを見つけ出したが、好ましくは、上述の運動系モデル(ここでは、負荷考慮運動系モデルという)と、上述の運動系モデルにおいて車両15とそのサスペンション15aの影響のみを除外した運動系モデル(ここでは、負荷除外運動系モデルという)との両方によるシミュレーションで、前記振動加速度が許容値以下となる索体制御パターンを見つけ出す。例えば、図9のように、まず、負荷考慮運動系モデルを用いて演算した前記振動加速度の振幅(例えばその最大振幅)が許容値以下となるまで、入力ステップS11、振動演算ステップS12、評価ステップS13をこの順で繰り返す。ここで、入力ステップS11、評価ステップS13は、それぞれ、上述の入力ステップS1、評価ステップS3と同じであり、振動演算ステップS12は、負荷考慮運動系モデルの代わりに負荷除外運動系モデルを用いて前記振動加速度を演算する点以外は、上述の振動演算ステップS2と同じである。入力ステップS11、振動演算ステップS12、および評価ステップS13により、前記振動加速度の振幅が許容値以下となる索体制御パターンが見つかったら(即ち、ステップS13でYES)、この索体制御パターンで、振動演算ステップS22を行う。この振動演算ステップS22は、上述の振動演算ステップS2と同じであり、当該索体制御パターンを負荷考慮運動系に適用して行われる。振動演算ステップS22で、振動加速度を算出したら、評価ステップS23により、この振動加速度の振幅(例えば最大振幅)が前記許容値以下かを判断し、そうであればシミュレーションを終了し、そうでなければ、索体制御パターンを変更して、入力ステップS11へ戻る。このような処理を、評価ステップS23でYESとなるまで繰り返す。
【0060】
上述の実施形態では、エレベータ3は、駆動シーブ7から繰り出された索体11による吊り下げられていたが、本発明は、これに限定されない。例えば、ドラムから繰り出された(巻き出された)ワイヤーロープなどの索体11により吊り下げられ、ドラムを回転駆動することで、索体11を介してエレベータ3を昇降させる場合にも本発明を適用できる。
【0061】
また、特許文献2のように、圧縮バネを介して索体11をエレベータ3に固定する場合には、上述の索体11のバネ定数k1を、当該圧縮バネのバネ特性も反映させた値にする。
【0062】
本発明では、索体制御パターンは、エレベータ3に向けて鉛直下方に索体11を繰り出す繰出速度と時間との関係、または、エレベータ3側から鉛直上方へ索体11を引き上げる引上速度と時間との関係を直接的または間接的に表すパターンであってよい。例えば、索体制御パターンは、上述の実施形態では、前記各関係を間接的に表す駆動モータ5aの角速度ωrefや回転速度N(t)であったが、前記各関係を間接的に表すr×dθ/dtであってもよい。いずれの場合でも、演算部19は、索体制御パターンからθ、dθ/dt、d2θ/dt2を取得し、これらを上式(1)〜(9)に適用して(例えば、上述の第1または第2の演算方法で)振動加速度を算出する。
【符号の説明】
【0063】
3 エレベータ、5 駆動装置、5a 駆動モータ、
5b 減速機、7 駆動シーブ、9 従動滑車、
10 シミュレーション装置、11 索体、
13 カウンターウエイト、15 車両、
15a 車両のサスペンション、17 入力部、
19 演算部、21 評価部
【技術分野】
【0001】
本発明は、駐車装置に設けられるエレベータの縦振動(加速度)を評価するシミュレーション装置と方法に関する。
【背景技術】
【0002】
エレベータを利用したエレベータ式駐車装置では、例えば、車両が駐車可能な駐車階を複数設け、入出庫階と各駐車階との間で、車両をエレベータで昇降させる。エレベータは、ワイヤーロープなどの索体で吊り下げられて昇降駆動される。
【0003】
エレベータ式駐車装置において、駐車階の数、エレベータの昇降速度、エレベータの昇降加速度などがそれほど大きくない場合には、エレベータを吊り下げる索体の縦振動、即ち、鉛直方向におけるエレベータの振動する加速度(以下、振動加速度という)が、顕著に現れなかった。従って、エレベータの昇降制御において、索体の縦振動が問題とはならなかった。
【0004】
本願の先行技術文献として、例えば下記の特許文献1、2がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−168485号公報
【特許文献2】特開平7−166732号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、近年のエレベータ式駐車装置が高層化し、これに伴い、索体が長くなってきた。この場合、索体のバネ特性により、エレベータの昇降停止時などに索体の縦振動(伸縮)が顕著に現れるようになってきた。この縦振動により、エレベータの停止状態をセンサが速やかに検出できなくなるため、縦振動が収まるまで次の動作に移れなくなる。その結果、入出車時間が長くなり、エレベータ式駐車装置の性能を悪化させることになる。
【0007】
そこで、本発明の目的は、前記エレベータの振動加速度を抑制できるエレベータの索体制御パターンを探し出せるようにすることにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明によると、駐車装置に設けられるエレベータの振動加速度を評価するシミュレーション装置であって、
前記エレベータは、索体に吊り下げられ該索体を介して昇降駆動され、
索体制御パターンを入力する入力部と、入力された前記索体制御パターンに基づいて前記振動加速度を演算する演算部と、を備え、
前記索体制御パターンは、前記エレベータに向けて鉛直下方に前記索体を繰り出す繰出速度と時間との関係、または、前記エレベータ側から鉛直上方へ前記索体を引き上げる引上速度と時間との関係であり、
前記演算部は、前記エレベータの運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算し、
前記運動系モデルには、前記索体のバネ特性が反映されている、ことを特徴とするシミュレーション装置が提供される。
【0009】
本発明の好ましい実施形態によると、前記運動系モデルには、前記エレベータに積載された車両のサスペンションのバネ特性が反映されている。
【0010】
また、本発明の好ましい実施形態によると、前記運動系モデルには、前記索体の前記バネ特性による縦振動の減衰特性が反映されている。
【0011】
さらに、本発明の好ましい実施形態によると、前記運動系モデルには、前記サスペンションの前記バネ特性による縦振動の減衰特性が反映されている。
【0012】
前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性は、前記エレベータに向けて鉛直下方に繰り出された前記索体の繰り出し長さの関数であり、
繰り出し長さと、前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性との関係を予め求めておき、
前記演算部は、当該関係に基づいて、前記振動加速度を算出してよい。
【0013】
好ましくは、前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了するようになっており、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了すようになっている。
【0014】
また、上記目的を達成するため、本発明によると、上述のシミュレーション装置を用いたシミュレーション方法であって、
前記入力部により、前記索体制御パターンを入力する入力ステップと、
前記演算部により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度を演算する振動演算ステップと、を有する、ことを特徴とするシミュレーション方法が提供される。
【0015】
本発明の好ましい実施形態によると、前記入力ステップで入力する前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了し、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する。
【発明の効果】
【0016】
上述した本発明によると、前記索体制御パターンを、前記エレベータの運動を表す運動系モデルに適用することで前記振動加速度を演算し、前記運動系モデルには、前記索体のバネ特性が反映されているので、前記索体の伸縮による振動加速度が許容値以下であるかを判断できる。演算した振動加速度が許容値を超える場合には、異なる索体制御パターンで振動加速度を再び演算して、振動加速度が許容値以下となる索体制御パターンを探し出すことができる。
また、本発明者は、エレベータに積載される車両のサスペンションが、エレベータの振動加速度に影響を与えることに着目して、前記運動系モデルに、前記エレベータに積載された車両のサスペンションのバネ特性を反映させた。これにより、高い精度で、エレベータの振動加速度を演算できる。なお、本発明の実施形態による他の効果は、後述する。
【図面の簡単な説明】
【0017】
【図1】本発明によるシミュレーション装置と方法の対象となるエレベータ式駐車装置のエレベータの昇降機構を示す。
【図2】図1のバネ特性を表わす昇降機構の簡略図である。
【図3】本発明の実施形態によるシミュレーション装置の処理の流れを示すブロック図である。
【図4】本発明の実施形態によるシミュレーション装置の処理の流れを示す別のブロック図である。
【図5】シミュレーション装置を示すブロック図である。
【図6】本実施形態によるシミュレーション結果を示すグラフである。
【図7】本発明の実施形態によるシミュレーション方法のフローチャートである。
【図8】本発明の実施形態によるシミュレーション結果と、実際の計測結果との比較を示すグラフである。
【図9】本発明の別の実施形態によるシミュレーション方法のフローチャートである。
【発明を実施するための形態】
【0018】
本発明を実施するための最良の実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0019】
図1は、本発明のシミュレーション装置10が適用可能な駐車装置のエレベータ3(ケージ)を昇降させる昇降機構を示す概略図である。昇降機構は、駆動装置5、駆動シーブ7、従動滑車9、索体11(図1の例では、ワイヤーロープ)、およびカウンターウエイト13を備える。駆動装置5は、駆動モータ5aと、該駆動モータ5aの回転を減速させる減速機5bとを備える。駆動モータ5aは、減速機5bを介して駆動シーブ7を回転させる。駆動シーブ7には、索体11の中間部が掛け渡されており、索体11の一端は、エレベータ3に固定されており、索体11の他端は、カウンターウエイト13に固定されている。従って、駆動シーブ7が回転すると、駆動シーブ7に掛けられた索体11が、その回転方向により、エレベータ3に向けて繰り出され、または、エレベータ3側から引き上げられてカウンターウエイト13に向けて繰り出され、これにより、エレベータ3が昇降する。図1の例では、このような索体11が、4本設けられており、これら4本の索体11は、それぞれ、エレベータ3の4隅から延びて、従動滑車9、従動滑車9、駆動シーブ7、従動滑車9にこの順で掛けられ、カウンターウエイト13まで延びている。
【0020】
図2は、図1のバネ特性を表わす昇降機構を簡略化した図である。即ち、図2では、図1の4本の索体11を1本の索体11として表現し、従動滑車9を省略している。図1、図2のように、エレベータ3は、索体11に吊り下げられ、駆動装置5により該索体11を介して昇降駆動される。
【0021】
図1、図2において、昇降する運動系は、エレベータ3、索体11、および、これらと共に運動する他の運動要素を有する。当該他の運動要素として、カウンターウエイト13、エレベータ3に積載される車両15(図1では省略)、および当該車両15が有するサスペンション15aがある。なお、図2では、サスペンション15aにより車両15がエレベータ3に吊り下げられているとする。これにより、後述の計算が簡単になり、かつ、エレベータ3に車両15が積載されている場合と同じ計算結果を得ることができる。
【0022】
図3、図4は、本発明の実施形態によるシミュレーション装置10による処理の流れを示すブロック図である。シミュレーション装置10は、駐車装置に設けられるエレベータ3の振動加速度を評価し、入力部17、演算部19、および評価部21を備える。
入力部17は、人に操作されることで、索体制御パターンを入力する装置であり、例えば、コンピュータのキーボードやマウスである。索体制御パターンは、入力部17から演算部19へ入力される。索体制御パターンは、索体11の移動速度と時間との関係である。即ち、索体制御パターンは、エレベータ3に向けて鉛直下方に索体11を繰り出す繰出速度と時間との関係、または、エレベータ3側から鉛直上方へ索体11を引き上げる引上速度と時間との関係である。
演算部19は、入力された前記索体制御パターンに基づいて前記振動加速度を演算し、該振動加速度を出力する。即ち、演算部19は、エレベータ3の運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算する。前記運動系モデルには、索体11のバネ特性が反映されている。
評価部21は、演算部19により演算された前記振動加速度の振幅(例えば、最大振幅)が、所定の許容値以下であるかを判断し、この判断の結果を示す信号を出力し、例えば、当該結果をディスプレイ装置に表示する。なお、評価部21の代わりに、演算部19から出力された前記振動加速度を示す波形を表示するディスプレイ装置が設けられてもよい。この波形は、横軸を時間とし、縦軸を当該振動加速度としてディスプレイ装置に表示される。この表示された波形に基づいて、前記振動加速度の振幅が許容値以下であるかを人が判断してもよい。
【0023】
図5は、図3、図4の処理を実行するシミュレーション装置10の構成を示すブロック図である。シミュレーション装置10は、入力部17、演算部19、および評価部21以外に、記憶装置23や通信装置25などを備える。
入力部17は、この例では、上述のキーボード17aおよびマウス17bの少なくとも一方により構成される。
演算部19は、コンピュータのCPU(中央処理装置)1、および、記憶装置23に記憶・保持された数値計算プログラムにより構成される。数値計算プログラムP1は、上述の運動系モデルを表したものである。演算部19において、CPU1は、数値計算プログラムP1を実行することで、上述のように、入力された前記索体制御パターンに基づいて前記振動加速度を演算して記憶装置23へ出力する。
評価部21は、CPU1、および、記憶装置23に記憶・保持された評価プログラムP2により構成される。評価部21において、CPU1は、評価プログラムP2を実行することで、上述のように、演算部19により演算された前記振動加速度の振幅が、所定の許容値以下であるかを判断し、この判断の結果を示す信号をディスプレイ装置18a、プリンタ18b、記憶装置23などへ出力し、例えば、当該結果をディスプレイ装置18aに表示させたり、プリンタ18bにより印刷させたりする。
記憶装置23は、数値計算プログラムP1、評価プログラムP2、演算部19から出力された前記振動加速度、評価部21から出力された前記判断の結果(例えば、上述の波形)などを記憶する。記憶装置23は、例えばハードディスクであってよい。
通信装置25は、ネットワーク27(例えば、LAN:local area network)に接続されている。このネットワーク27を介して、通信装置25は、所望の場所に設置されたコンピュータや記憶装置などへ前記振動加速度および前記判断の結果の少なくとも一方を送信することができる。
【0024】
上述の運動系モデルとして、後述の式(1)〜(9)が演算部19に保持される。本実施形態によると、運動系モデル(即ち、後述の式(1)〜(9))には、索体11のバネ特性(即ち、後述のバネ定数k1、k2)と、サスペンション15aのバネ特性(即ち、後述のバネ定数k3)が反映されている。また、本実施形態では、運動系モデル(即ち、後述の式(1)〜(9))には、索体11のバネ特性による縦振動の減衰特性(即ち、後述の減衰係数c1、c2)と、サスペンション15aのバネ特性による縦振動の減衰特性(即ち、後述の減衰係数c3)が反映されている。
【0025】
以下において、上述の運動系モデルとして演算部19に保持される式(1)〜(9)を説明する。
【0026】
エレベータ3を含む運動系の運動方程式は、次の[数1]の式(1)〜(3)で表される。
【0027】
【数1】
【0028】
ここで、上記各式(1)〜(3)の各記号について説明する。
rは、駆動シーブ7の半径を表す。θは、駆動シーブ7の回転角度を表す。x1、x2およびx3は、下向きを正の方向として、それぞれ、エレベータ3の変位(即ち、鉛直方向の変位)、カウンターウエイト13の変位(即ち、鉛直方向の変位)、車両15の変位(即ち、鉛直方向の変位)を表す。m1、m2およびm3は、それぞれ、エレベータ3の質量、カウンターウエイト13の質量、車両15の質量を表す。gは、重力加速度を表す。
c1、c2およびc3は、上述の減衰特性としての減衰係数であり、k1、k2およびk3は、上述のバネ特性としてのバネ定数である。即ち、索体11が、その長さ方向(即ち、鉛直方向)にバネ定数k1、k2で伸縮振動するバネであるとし、かつ、この伸縮振動をしながら、当該伸縮振動の振幅が減衰係数c1、c2で減衰するとする。k1、c1は、それぞれ、エレベータ3と駆動シーブ7との間における索体11のバネ定数、減衰係数であり、k2、c2は、それぞれ、カウンターウエイト13と駆動シーブ7との間における索体11のバネ定数、減衰係数である。また、車両15のサスペンション15aが、鉛直方向にバネ定数k3で伸縮振動するバネであるとし、かつ、この伸縮振動をしながら、当該伸縮振動の振幅が減衰係数c3で減衰するとする。
x1、x2、x3または後述のθの真上に付したドット記号「・」は、x1、x2、x3またはθの時間による1回微分(即ち、dx1/dt、dx2/dt、dx3/dt、dθ/dt)を示し、x1、x2、x3または後述のθの真上に付した2つのドット記号「・・」は、x1、x2、x3またはθの時間による2回微分(即ち、d2x1/dt2、d2x2/dt2、d2x3/dt2、d2θ/dt2)を示す。
x10は、初期状態での索体11の静的伸縮によるエレベータ3の変位(即ち、x1の原点から索体11の静的伸縮量だけ変位した位置)を表し、x20は、初期状態での索体11の静的伸縮によるカウンターウエイト13の変位(即ち、x2の原点から索体11の静的伸縮量だけ変位した位置)を表し、x30は、初期状態での索体11とサスペンション15aの静的伸縮による車両15の変位(即ち、x3の原点からサスペンション15aの静的伸縮量だけ変位した位置)を表す。x10、x20およびx30は、次の[数2]の式(4)〜(6)を満足する。
上述した各記号の定義は、以下においても同じである。
【0029】
【数2】
【0030】
さらに、駆動シーブ7の回転運動を表す次の[数3]の式(7)を加える。
【0031】
【数3】
【0032】
ここで、τinは、駆動モータ5aのトルクを表す。(Js+α2Jm)は、駆動シーブ7の回転軸で換算された慣性モーメントを表し、Jsは、駆動シーブ7に集約された機械系の慣性モーメントを表し、Jmは、駆動モータ5aの慣性モーメントを表し、αは、減速機5bによる減速比を表す。T1は、駆動シーブ7からエレベータ3までにおける索体11の張力を表し、T2は、駆動シーブ7からカウンターウエイト13までにおける索体11の張力を表す。T1、T2は、それぞれ、次の[数4]の式(8)、(9)で表される。これら各記号の定義は、以下においても同じである。
【0033】
【数4】
【0034】
演算部19による第1および第2の演算方法を説明する。
【0035】
[第1の演算方法]
演算部19には、図3のように、索体制御パターンが入力部19から入力される。この索体制御パターンは、駆動モータ5aの角速度ωrefである。ωrefは、時間tの関数である。
【0036】
X=[x1 x2 x3]Tと置き、上述の式(1)〜(3)を、次の[数5]の式(10)で表わす。
【0037】
【数5】
【0038】
ここで、M、C、K、U、Fは、それぞれ、次の[数6]の式(11)〜(15)で表わされる。
【0039】
【数6】
【0040】
上式(10)の右辺において、第1項を外乱、第2項を入力であると見ることができる。
駆動モータ5aの角速度指令ωrefに対する駆動シーブ7の周波数応答は、次の[数7]の式(16)、即ち、式(17)で表わされる。
【0041】
【数7】
【0042】
上式(17)において、sはラプラス演算子であり、Taは、時定数である。上式(17)を状態空間表示すると、次の[数8]の式(18)を得る。
【0043】
【数8】
【0044】
上式(10)と上式(18)を組み合わせた次の[数9]の式(19)が、駆動シーブ7の角速度入力に対するエレベータ3とカウンターウエイト13の動的挙動を表わす状態方程式となる。
【0045】
【数9】
【0046】
演算部19は、上式(19)と上式(4)〜(6)を用いて、駆動モータ5aの角速度指令ωrefに対して、x1、x2、x3、dx1/dt、dx2/dt、dx3/dt、およびθ、dθ/dt、さらに、d2x1/dt2、d2x2/dt2、d2x3/dt2、d2θ/dt2を算出する。この計算は、時々刻々と各変数(x1など)を計算していく逐次計算であってよい。このように、演算部19は、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。
【0047】
[第2の演算方法]
演算部19は、例えば、次のように、入力に基づいて演算してもよい。演算部19には、図4のように、索体制御パターンが入力部17から入力される。この索体制御パターンは、この例では、駆動モータ5aの回転速度N(t)(即ち、単位時間当たりの回転数)である。N(t)は、時間tの関数である。演算部19は、N(t)を減速比αで割ることで、駆動シーブ7の回転速度(即ち、dθ/dt=N(t)/α)を算出する。また、演算部19は、dθ/dtとθの既知の初期値とに基づいて、θを算出する。さらに、演算部19は、θの時間による2回微分(d2θ/dt2)を算出する。次いで、演算部19は、算出したθ、dθ/dt、d2θ/dt2を、運動系モデル(即ち、上式(1)〜(9))に適用することで、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。なお、演算部19は、θ、dθ/dt、d2θ/dt2を上述の式(1)〜(9)に適用することで、τin、T1、T2、x1、dx1/dt、x2、dx2/dt、d2x2/dt2、x3、dx3/dt、d2x3/dt2も算出できる。なお、時間により値が変化する各パラメータの初期値は既知であるとして、演算部19は、上述の演算を行う。この演算は、時々刻々と各変数(x1など)を計算していく逐次計算であってよい。
【0048】
図6は、シミュレーション装置10によるシミュレーション結果を示すグラフである。図6(A)〜(C)は、それぞれ異なる索体制御パターンによるシミュレーション結果を示す。図6(A)〜(C)において、符号Pは、演算部19に入力された索体制御パターンを(r×dθ/dt)として表したグラフ示し、符号Qは、入力された索体制御パターンに基づいて演算部19が上述の式(1)〜(9)により算出した振動加速度d2x1/dt2を表すグラフを示す。なお、図6(A)〜(C)は、エレベータが静止状態から70m上昇して停止した場合を示す。
【0049】
図7は、上述したシミュレーション装置10を用いたシミュレーション方法を示すフローチャートである。シミュレーション方法は、入力ステップS1と振動演算ステップS2を有する。
入力ステップS1では、人が入力部17を操作することで、前記索体制御パターンを入力する。例えば、上述のように索体制御パターンとして、N(t)、r×dθ/dtまたは他の式を入力部17により入力する。
振動演算ステップS2では、演算部19により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度d2x1/dt2を演算する。この演算は、上述と同じ方法で行う。
【0050】
本実施形態によると、好ましくは、前記索体制御パターンは、次のように、S字曲線の波形を有する。入力ステップS1で入力する前記索体制御パターンは、図6(C)の索体制御パターンPのように、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有する。前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了する。前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する。従って、前記索体制御パターンは、図6(C)のように、S字曲線の波形を有する。
【0051】
また、上述のシミュレーション方法は、評価ステップS3を有してよい。評価ステップS3では、振動演算ステップS2で演算した振動加速度が、所定の許容値以下であるかを判断する。この判断は、上述の評価部21で行ってもよいし、上述のディスプレイ装置に表示された当該振動加速度に基づいて人が行ってもよい。当該振動加速度が、所定の許容値を超える場合には、図7のように、索体制御パターンを変えて、再び、入力ステップS1、振動演算ステップS2、評価ステップS3を行ってよい。このような処理を、振動演算ステップS2で演算した振動加速度が、所定の許容値以下になるまで繰り返してよい。このようにして、振動加速度が所定の許容値以下となる索体制御パターンが見つかったら、シミュレーションを終了し、この索体制御パターンで、図1のエレベータ3を実際に昇降駆動させる。
本実施形態では、索体制御パターンを変える場合、好ましくは、上述のS字曲線の波形において、S字の度合いを変えた索体制御パターンで、再び入力ステップS1、振動演算ステップS2、評価ステップS3を行う。
【0052】
なお、索体11のバネ定数k1、k2と減衰係数c1、c2は、既知であれば、その既知の値を使用する。k1、k2とc1、c2が、既知でない場合には、例えば、所定の条件の下で、索体11を実際に伸縮振動させ、その伸縮振動を測定することで、k1、k2、c1、c2を取得してよい。
同様に、サスペンション15aのバネ定数k3と減衰係数c3は、既知であれば、その既知の値を使用する。サスペンション15aのバネ定数k3と減衰係数c3が、既知でない場合には、例えば、所定の条件の下で、サスペンション15aを実際に伸縮振動させ、その伸縮振動を測定することで、k3、c3を取得してよい。なお、駐車装置の使用時に、エレベータ3に積載される種々の車両15のサスペンション15aのバネ定数と減衰係数の平均値を、k3、c3として本実施形態で使用してよい。
車両15の質量m3は、駐車装置の使用時に、エレベータ3に積載される種々の車両15の質量の平均値としてよい。
【0053】
なお、k1、k2、c1、c2は、一定であるとしてもよいが、エレベータ3に向けて鉛直下方に駆動シーブ7から繰り出された索体11の長さ(即ち、駆動シーブ7からエレベータ3までの索体11の長さ。以下、繰り出し長さという)の関数であるとしてもよい。この場合、使用する索体11を伸縮振動させた要素試験を実機とは別に実施し、前記繰り出し長さとk1、k2、c1、c2との関係をテーブル化、または、近似式によって予め求めておく。演算部19は、当該関係に基づいて、上述の第1または第2の演算方法の上記逐次計算において、時々刻々と変えたk1、k2、c1、c2を用いて、エレベータ3の振動加速度(即ち、d2x1/dt2)を算出する。
【0054】
上述した本発明の実施形態によるシミュレーション装置10と方法では、以下の効果(ア)〜(ウ)が得られる。
【0055】
(ア)前記索体制御パターンを、エレベータ3の運動を表す運動系モデルに適用することで前記振動加速度を演算し、前記運動系モデルには、索体11のバネ特性が反映されているので、索体11の伸縮による振動加速度が許容値以下であるかを判断できる。演算した振動加速度が許容値を超える場合には、(好ましくは、上述のS字曲線の度合いを変化させた)異なる索体制御パターンで振動加速度を再び演算して、振動加速度が許容値以下となる索体制御パターンを探し出すことができる。
【0056】
(イ)エレベータ3に積載される車両15のサスペンション15aが、エレベータ3の振動加速度に影響を与えることに着目して、前記運動系モデルには、エレベータ3に積載された車両15のサスペンション15aのバネ特性を反映させたので、高い精度で、エレベータ3の振動加速度を演算できる。
図8(A)は、上述のようなS字曲線の波形を有する索体制御パターンを入力部17から入力して、演算部19により算出したエレベータ3の振動加速度を表す波形を示す。図8(B)は、図8(A)の結果を得るのに使用した同じ索体制御パターンで、図1のエレベータ3を実際に昇降駆動した場合に計測したエレベータ3の振動加速度を表す波形を示す。図8(A)と図8(B)から、本実施形態により算出した振動加速度は、実際の波形と精度よく一致することが分かる。
なお、本実施形態により算出した振動加速度が、実際の波形からずれた場合には、パラメータ(k1〜k3、c1〜c3など)の評価を行い、これらパラメータの値を適宜修正して次のシミュレーションを行い、再度、シミュレーションによる振動加速度の波形と、実際の波形とを比較し、両者がずれていれば、再度、パラメータの値を修正するといった具合に、このようなシミュレーション、比較、パラメータ値の修正を繰り返し行ってよい。これにより、シミュレーションの精度を向上させることができる。
【0057】
(ウ)前記索体制御パターンが、上述のようなS字曲線の波形を有することでエレベータ3の加速度振動を小さい値に抑えることが可能となる。即ち、図6(A),(B)、(C)のうち、S字曲線の波形を有する索体制御パターンを入力した図6(C)の場合には、S字曲線の波形を有しない索体制御パターンを入力した図6(A)または(B)の場合と比較して、加速度振動が大幅に抑制されていることが分かる。
【0058】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。
【0059】
上述の実施形態では、車両15とそのサスペンション15aを反映させた運動系モデルを用いて、所定の許容値以下となる索体制御パターンを見つけ出したが、好ましくは、上述の運動系モデル(ここでは、負荷考慮運動系モデルという)と、上述の運動系モデルにおいて車両15とそのサスペンション15aの影響のみを除外した運動系モデル(ここでは、負荷除外運動系モデルという)との両方によるシミュレーションで、前記振動加速度が許容値以下となる索体制御パターンを見つけ出す。例えば、図9のように、まず、負荷考慮運動系モデルを用いて演算した前記振動加速度の振幅(例えばその最大振幅)が許容値以下となるまで、入力ステップS11、振動演算ステップS12、評価ステップS13をこの順で繰り返す。ここで、入力ステップS11、評価ステップS13は、それぞれ、上述の入力ステップS1、評価ステップS3と同じであり、振動演算ステップS12は、負荷考慮運動系モデルの代わりに負荷除外運動系モデルを用いて前記振動加速度を演算する点以外は、上述の振動演算ステップS2と同じである。入力ステップS11、振動演算ステップS12、および評価ステップS13により、前記振動加速度の振幅が許容値以下となる索体制御パターンが見つかったら(即ち、ステップS13でYES)、この索体制御パターンで、振動演算ステップS22を行う。この振動演算ステップS22は、上述の振動演算ステップS2と同じであり、当該索体制御パターンを負荷考慮運動系に適用して行われる。振動演算ステップS22で、振動加速度を算出したら、評価ステップS23により、この振動加速度の振幅(例えば最大振幅)が前記許容値以下かを判断し、そうであればシミュレーションを終了し、そうでなければ、索体制御パターンを変更して、入力ステップS11へ戻る。このような処理を、評価ステップS23でYESとなるまで繰り返す。
【0060】
上述の実施形態では、エレベータ3は、駆動シーブ7から繰り出された索体11による吊り下げられていたが、本発明は、これに限定されない。例えば、ドラムから繰り出された(巻き出された)ワイヤーロープなどの索体11により吊り下げられ、ドラムを回転駆動することで、索体11を介してエレベータ3を昇降させる場合にも本発明を適用できる。
【0061】
また、特許文献2のように、圧縮バネを介して索体11をエレベータ3に固定する場合には、上述の索体11のバネ定数k1を、当該圧縮バネのバネ特性も反映させた値にする。
【0062】
本発明では、索体制御パターンは、エレベータ3に向けて鉛直下方に索体11を繰り出す繰出速度と時間との関係、または、エレベータ3側から鉛直上方へ索体11を引き上げる引上速度と時間との関係を直接的または間接的に表すパターンであってよい。例えば、索体制御パターンは、上述の実施形態では、前記各関係を間接的に表す駆動モータ5aの角速度ωrefや回転速度N(t)であったが、前記各関係を間接的に表すr×dθ/dtであってもよい。いずれの場合でも、演算部19は、索体制御パターンからθ、dθ/dt、d2θ/dt2を取得し、これらを上式(1)〜(9)に適用して(例えば、上述の第1または第2の演算方法で)振動加速度を算出する。
【符号の説明】
【0063】
3 エレベータ、5 駆動装置、5a 駆動モータ、
5b 減速機、7 駆動シーブ、9 従動滑車、
10 シミュレーション装置、11 索体、
13 カウンターウエイト、15 車両、
15a 車両のサスペンション、17 入力部、
19 演算部、21 評価部
【特許請求の範囲】
【請求項1】
駐車装置に設けられるエレベータの振動加速度を評価するシミュレーション装置であって、
前記エレベータは、索体に吊り下げられ該索体を介して昇降駆動され、
索体制御パターンを入力する入力部と、入力された前記索体制御パターンに基づいて前記振動加速度を演算する演算部と、を備え、
前記索体制御パターンは、前記エレベータに向けて鉛直下方に前記索体を繰り出す繰出速度と時間との関係、または、前記エレベータ側から鉛直上方へ前記索体を引き上げる引上速度と時間との関係であり、
前記演算部は、前記エレベータの運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算し、
前記運動系モデルには、前記索体のバネ特性が反映されている、ことを特徴とするシミュレーション装置。
【請求項2】
前記運動系モデルには、前記エレベータに積載された車両のサスペンションのバネ特性が反映されている、ことを特徴とする請求項1に記載のシミュレーション装置。
【請求項3】
前記運動系モデルには、前記索体の前記バネ特性による縦振動の減衰特性が反映されている、ことを特徴とする請求項1に記載のシミュレーション装置。
【請求項4】
前記運動系モデルには、前記サスペンションの前記バネ特性による縦振動の減衰特性が反映されている、ことを特徴とする請求項2に記載のシミュレーション装置。
【請求項5】
前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性は、前記エレベータに向けて鉛直下方に繰り出された前記索体の繰り出し長さの関数であり、
繰り出し長さと、前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性との関係を予め求めておき、
前記演算部は、当該関係に基づいて、前記振動加速度を算出する、ことを特徴とする請求項3または4に記載のシミュレーション装置。
【請求項6】
前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了するようになっており、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了すようになっている、ことを特徴とする請求項1〜5のいずれか一項に記載のシミュレーション装置。
【請求項7】
請求項1〜6のいずれか一項に記載のシミュレーション装置を用いたシミュレーション方法であって、
前記入力部により、前記索体制御パターンを入力する入力ステップと、
前記演算部により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度を演算する振動演算ステップと、を有する、ことを特徴とするシミュレーション方法。
【請求項8】
前記入力ステップで入力する前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率を徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了し、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率を徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する、ことを特徴とする請求項7に記載のシミュレーション方法。
【請求項1】
駐車装置に設けられるエレベータの振動加速度を評価するシミュレーション装置であって、
前記エレベータは、索体に吊り下げられ該索体を介して昇降駆動され、
索体制御パターンを入力する入力部と、入力された前記索体制御パターンに基づいて前記振動加速度を演算する演算部と、を備え、
前記索体制御パターンは、前記エレベータに向けて鉛直下方に前記索体を繰り出す繰出速度と時間との関係、または、前記エレベータ側から鉛直上方へ前記索体を引き上げる引上速度と時間との関係であり、
前記演算部は、前記エレベータの運動を表す運動系モデルを保持し、該運動系モデルに前記索体制御パターンを適用することで前記振動加速度を演算し、
前記運動系モデルには、前記索体のバネ特性が反映されている、ことを特徴とするシミュレーション装置。
【請求項2】
前記運動系モデルには、前記エレベータに積載された車両のサスペンションのバネ特性が反映されている、ことを特徴とする請求項1に記載のシミュレーション装置。
【請求項3】
前記運動系モデルには、前記索体の前記バネ特性による縦振動の減衰特性が反映されている、ことを特徴とする請求項1に記載のシミュレーション装置。
【請求項4】
前記運動系モデルには、前記サスペンションの前記バネ特性による縦振動の減衰特性が反映されている、ことを特徴とする請求項2に記載のシミュレーション装置。
【請求項5】
前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性は、前記エレベータに向けて鉛直下方に繰り出された前記索体の繰り出し長さの関数であり、
繰り出し長さと、前記索体の前記バネ特性、または該バネ特性による縦振動の減衰特性との関係を予め求めておき、
前記演算部は、当該関係に基づいて、前記振動加速度を算出する、ことを特徴とする請求項3または4に記載のシミュレーション装置。
【請求項6】
前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率をゼロから徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了するようになっており、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率をゼロから徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了すようになっている、ことを特徴とする請求項1〜5のいずれか一項に記載のシミュレーション装置。
【請求項7】
請求項1〜6のいずれか一項に記載のシミュレーション装置を用いたシミュレーション方法であって、
前記入力部により、前記索体制御パターンを入力する入力ステップと、
前記演算部により、前記索体制御パターンを前記運動系モデルに適用することで、前記振動加速度を演算する振動演算ステップと、を有する、ことを特徴とするシミュレーション方法。
【請求項8】
前記入力ステップで入力する前記索体制御パターンは、前記繰出速度または前記引上速度が時間と共に増加する範囲が定められた加速部分と、前記繰出速度または前記引上速度が時間と共に減少する範囲が定められた減速部分とを有し、
前記加速部分では、前記繰出速度または前記引上速度の時間に対する増加率を徐々に大きくすることで加速を開始し、その後、前記増加率がゼロになるまで前記増加率を徐々に小さくすることで前記加速を終了し、
前記減速部分では、前記繰出速度または前記引上速度の時間に対する減少率を徐々に大きくすることで減速を開始し、その後、前記減少率がゼロになるまで前記減少率を徐々に小さくすることで前記減速を終了する、ことを特徴とする請求項7に記載のシミュレーション方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−57305(P2011−57305A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−205764(P2009−205764)
【出願日】平成21年9月7日(2009.9.7)
【出願人】(000198363)IHI運搬機械株式会社 (292)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月7日(2009.9.7)
【出願人】(000198363)IHI運搬機械株式会社 (292)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]